introduction robotics lecture - day 3 out of 7.ppt · scara geometry introduction robotics, lecture...
TRANSCRIPT

1/39
Introduction Robotics
Introduction Robotics, lecture 3 of 7
dr Dragan Kostić
WTB Dynamics and Control
September-October 2009
Introduction Robotics

2/39
• Recapitulation
• Forward kinematics
Outline
Introduction Robotics, lecture 3 of 7
• Inverse kinematics problem

3/39
Recapitulation
Introduction Robotics, lecture 3 of 7
Recapitulation

4/39
Robot manipulators
• Kinematic chain is series
of links and joints.SCARAgeometry
Introduction Robotics, lecture 3 of 7
• Types of joints:
– rotary (revolute, θ)
– prismatic (translational, d).
geometry
schematic representations of robot joints

5/39
Common geometries of robot manipulators
Introduction Robotics, lecture 3 of 7

6/39
Forward kinematics problem
• Determine position and orientation of the end-effector as
function of displacements in robot joints.
Introduction Robotics, lecture 3 of 7

7/39
DH convention for homogenous transformations (1/2)
• An arbitrary homogeneous transformation is based on 6
independent variables: 3 for rotation + 3 for translation.
• DH convention reduces 6 to 4, by specific choice of
the coordinate frames.
Introduction Robotics, lecture 3 of 7
the coordinate frames.
• In DH convention, each homogeneous transformation has the form:

8/39
DH convention for homogenous transformations (2/2)
• Position and orientation of coordinate frame i with respect to
frame i-1 is specified by homogenous transformation matrix:
qi
q0
qi+1
xn
z0
zn
Introduction Robotics, lecture 3 of 7
ai
qi
qi
x0
xi-1
xi
zi
zi-1
y0 yn
zn
di
αi‘0’ ‘ ’n
where

9/39
Physical meaning of DH parameters• Link length ai is distance from zi-1 to
zi measured along xi.
• Link twist αi is angle between zi-1
and zi measured in plane normal
to x (right-hand rule). ai
qi
q0
qi+1
xx
zi
xn
y0 yn
z0
zn
αi‘0’ ‘ ’n
Introduction Robotics, lecture 3 of 7
to xi (right-hand rule).
• Link offset di is distance from origin
of frame i-1 to the intersection xi
with zi-1, measured along zi-1.
• Joint angle θi is angle from xi-1 to xi
measured in plane normal to zi-1
(right-hand rule).
ai
qi
x0
xi-1
xi
zi-1di

10/39
DH convention to assign coordinate frames1. Assign zi to be the axis of actuation for joint i+1 (unless otherwise stated zn
coincides with zn-1).
2. Choose x0 and y0 so that the base frame is right-handed.
3. Iterative procedure for choosing oixiyizi depending on oi-1xi-1yi-1zi-1 (i=1, 2, …, n-1):
a) zi−1 and zi are not coplanar; there is an unique shortest line segment from zi−1 to
zi, perpendicular to both; this line segment defines xi and the point where the
Introduction Robotics, lecture 3 of 7
zi, perpendicular to both; this line segment defines xi and the point where the
line intersects zi is the origin oi; choose yi to form a right-handed frame,
b) zi−1 is parallel to zi; there are infinitely many common normals; choose xi as
the normal passes through oi−1; choose oi as the point at which this normal
intersects zi; choose yi to form a right-handed frame,
c) zi−1 intersects zi; axis xi is chosen normal to the plane formed by zi and zi−1;
it’s positive direction is arbitrary; the most natural choice of oi is the
intersection of zi and zi−1, however, any point along the zi suffices;
choose yi to form a right-handed frame.

11/39
Forward Kinematics
Introduction Robotics, lecture 3 of 7
Forward Kinematics

12/39
Forward kinematics (1/2)
• Homogenous transformation matrix relating the frame oixiyizi to
oi-1xi-1yi-1zi-1:
Introduction Robotics, lecture 3 of 7
Ai specifies position and orientation of oixiyizi w.r.t. oi-1xi-1yi-1zi-1.
• Homogenous transformation matrix Tji expresses position and
orientation of ojxjyjzj with respect to oixiyizi:
jjiiij AAAAT 121 −++= K

13/39
• Forward kinematics of a serial manipulator with n joints can be
represented by homogenous transformation matrix Hn0 which
defines position and orientation of the end-effector’s (tip)
frame o x y z relative to the base coordinate frame o x y z :
Forward kinematics (2/2)
Introduction Robotics, lecture 3 of 7
frame onxnynzn relative to the base coordinate frame o0x0y0z0:
=
⋅⋅==
×1
)()()(
),()()()(
13
00
0
11
00
0
qqq
nn
n
nnnn
xRH
qAqATH K
[ ];00013 =×
0
[ ]Tnqq L1=q

14/39
Case-study: RRR robot manipulator
-q3
x
x2
x3
y1
y2
y3
d2a3
d3
z2
z3
elbow
Introduction Robotics, lecture 3 of 7 x0
q1
q2
x1
y0
y1
z0
α1
d1
a2
z1
z2
waist
shoulder
elbow
α1 - twist angle
ai - link lenghts
di - link offsets
qi - displacements

15/39
DH parameters of RRR robot manipulator
Introduction Robotics, lecture 3 of 7

16/39
Forward kinematics of RRR robot manipulator (1/2)
• Coordinate frame o3x3y3z3 is related with the base frame o0x0y0z0 via
homogenous transformation matrix:
== 32103 (q)(q)A(q)AA(q)T
Introduction Robotics, lecture 3 of 7
=
× 131
03
03
0
(q)x(q)R
whereT
qqq ][ 321=qT
zyx ][)(03 =qx
]000[31 =×0
17/39
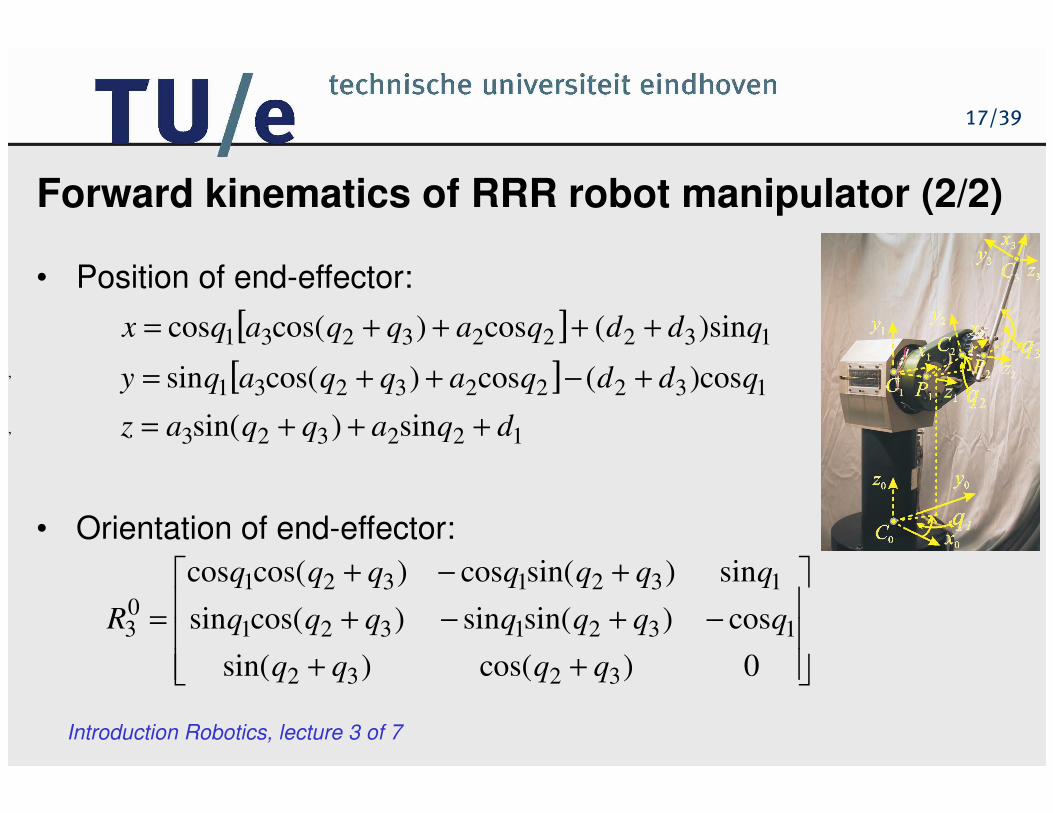
Forward kinematics of RRR robot manipulator (2/2)
,
• Position of end-effector:
[ ] 132223231 )sin(cos)cos(cos qddqaqqaqx ++++=
[ ] 132223231 )cos(cos)cos(sin qddqaqqaqy +−++=
Introduction Robotics, lecture 3 of 7
, 122323 sin)sin( dqaqqaz +++=
• Orientation of end-effector:
++
−+−+
+−+
=
0)cos()sin(
cos)sin(sin)cos(sin
sin)sin(cos)cos(cos
3232
1321321
132132103
qqqq
qqqqqqq
qqqqqqq
R

18/39
Inverse Kinematics
Introduction Robotics, lecture 3 of 7
Inverse Kinematics

19/39
Inverse kinematics problem
• Inverse kinematics (IK): determine displacements in robot joints that
correspond to given position and orientation of the end-effector.
Introduction Robotics, lecture 3 of 7

20/39
Illustration: IK for planar RR manipulator (1/2)
• Elbow down IK solution
Introduction Robotics, lecture 3 of 7

21/39
Illustration: IK for planar RR manipulator (2/2)
• Elbow up IK solution
Introduction Robotics, lecture 3 of 7

22/39
The general IK problem (1/2)• Given a homogenous transformation matrix H∈SE(3)
find (multiple) solution(s) q1,…,qn to equation
Introduction Robotics, lecture 3 of 7
find (multiple) solution(s) q1,…,qn to equation
• Here, H represents the desired position and orientation of the tip
coordinate frame onxnynzn relative to coordinate frame o0x0y0z0
of the base; T0n is product of homogenous transformation
matrices relating successive coordinate frames:

23/39
The general IK problem (2/2)
• Since the bottom rows of both T0n and H are equal to [0 0 0 1],
equation
Introduction Robotics, lecture 3 of 7
gives rise to 4 trivial equations and 12 equations in n unknowns
q1,…,qn:
Here, Tij and Hij are nontrivial elements of T0n and H.

24/39
Illustration: Stanford manipulator
Introduction Robotics, lecture 3 of 7

25/39
FK of Stanford manipulator
Introduction Robotics, lecture 3 of 7

26/39
Example of IK solution for Stanford manipulator• Rotational equations (correspond to R0
6):
Introduction Robotics, lecture 3 of 7
• Positional equations (correspond to o06):• One solution:

27/39
Nature of IK solutions• FK problem has always unique solution whereas IK problem may
or may not have a solution; if IK solution exists, it may or may not
be unique; solving IK equations, in general, is much too difficult.
• It is preferable to find IK solutions in closed-form:
Introduction Robotics, lecture 3 of 7
– faster computation (e.g. at sampling time of 1 [ms]),
– if multiple IK solutions exist, then closed-form allows us to develop
rules for choosing a particular solution among several.
• Existence of IK solutions depends on mathematical as well as
engineering considerations.
• We assume that the given position and orientation is such that at
least one IK solution exists.

28/39
Kinematic decoupling (1/3)
• General IK problem is difficult BUT for manipulators having 6 joints
with the last 3 joint axes intersecting at one point, it is possible to
decouple the general IK problem into two simpler problems:
inverse position kinematics and inverse orientation kinematics.
Introduction Robotics, lecture 3 of 7
inverse position kinematics and inverse orientation kinematics.
• IK problem: for given R and o solve 9 rotational and 3 positional
equations:

29/39
Kinematic decoupling (2/3)
• Spherical wrist as paradigm.
Introduction Robotics, lecture 3 of 7
• Let oc be the intersection of the last 3 joint axes; as z3, z4, and z5
intersect at oc, the origins o4 and o5 will always be at oc;
the motion of joints 4, 5 and 6 will not change the position of oc;
only motions of joints 1, 2 and 3 can influence position of oc.

30/39
Kinematic decoupling (3/3)
Introduction Robotics, lecture 3 of 7
⇒ q1, q2, q3
⇒
⇒ q4, q5, q6

31/39
Articulated manipulator: inverse position problem
Introduction Robotics, lecture 3 of 7
• Inverse tangent function Atan2(xc,yc) is defined for all (xc,yc)≠(0,0)
and equals the unique angle θ1 such that:
,cos22
1
cc
c
yx
x
+=θ .sin
221
cc
c
yx
y
+=θ
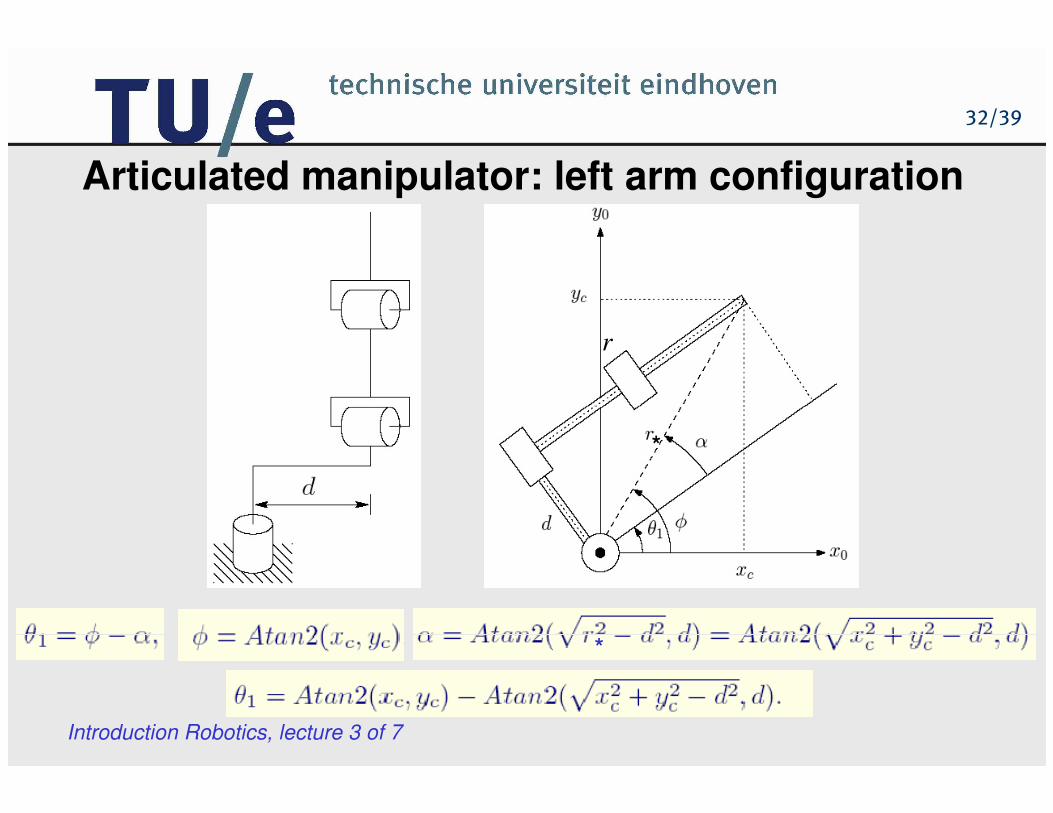
32/39
Articulated manipulator: left arm configuration
r
Introduction Robotics, lecture 3 of 7
*
*

33/39
Articulated manipulator: right arm configuration
Introduction Robotics, lecture 3 of 7 +π*
*
r

34/39
*
r
Articulated manipulator: IK solution for θθθθ3
Introduction Robotics, lecture 3 of 7
• Law of cosines:
+ elbow down; - elbow up

35/39
Articulated manipulator: IK solution for θθθθ2
υυυυ θ =υ - υ
Introduction Robotics, lecture 3 of 7
υυυυ1
υυυυ2 θ2=υ1- υ2
υ1=Atan2(r,s)
υ2=Atan2(a2+a3cosθ3,a3sinθ3)

36/39
Four IK solutions θθθθ1-θθθθ3 for articulated manipulator
• PUMA robot as
an example of
the articulated
geometry.
Introduction Robotics, lecture 3 of 7
geometry.

37/39
Articulated manipulator: inverse orientation problem
Introduction Robotics, lecture 3 of 7 • Equation to solve:

38/39
Articulated manipulator: IK solutions for θθθθ4 and θθθθ5
• Equations given by the third column in :
Introduction Robotics, lecture 3 of 7
• If not both right-hand sides of the first two equations are zero:
±
• If positive square root is chosen in solution for θ5:

39/39
Articulated manipulator: IK solutions for θθθθ6
• The first two equations given by the last row in :
-s5c6 = s1r11 - c1r21
s5s6 = s1r12 - c1r22
Introduction Robotics, lecture 3 of 7
• Analogous approach if negative square root is chosen in
solution for θ5.
• From these equations it follows: