introduction to sensor and actuator networks · introduction to sensor and actuator networks wcng...
TRANSCRIPT
Introduction to Sensor and Actuator Networks
WCNG Group MeetingFeb. 19, 2007
Outline
Introduction1. Classification of WSAN2. WSAN Challenges3. Control systems aspect
1. Existing Protocols for WSAN2. Stability of Wired Sensor and Actuator Networks
4. Research directions
Definition and characteristics
l Wireless Sensor and Actuator Networks (WSAN): network of sensor nodes that can measure stimuli in environment + network of actuators capable of modifying this environment
l Actuators tend to have more energy, very heterogeneous networks
l Oftentimes, actuators are mobile, in smaller numbersl Packets containing measurement are obsolete (dropped)
by the time of new measurement è time delay is particularly stringent
Taxonomy of Actuators
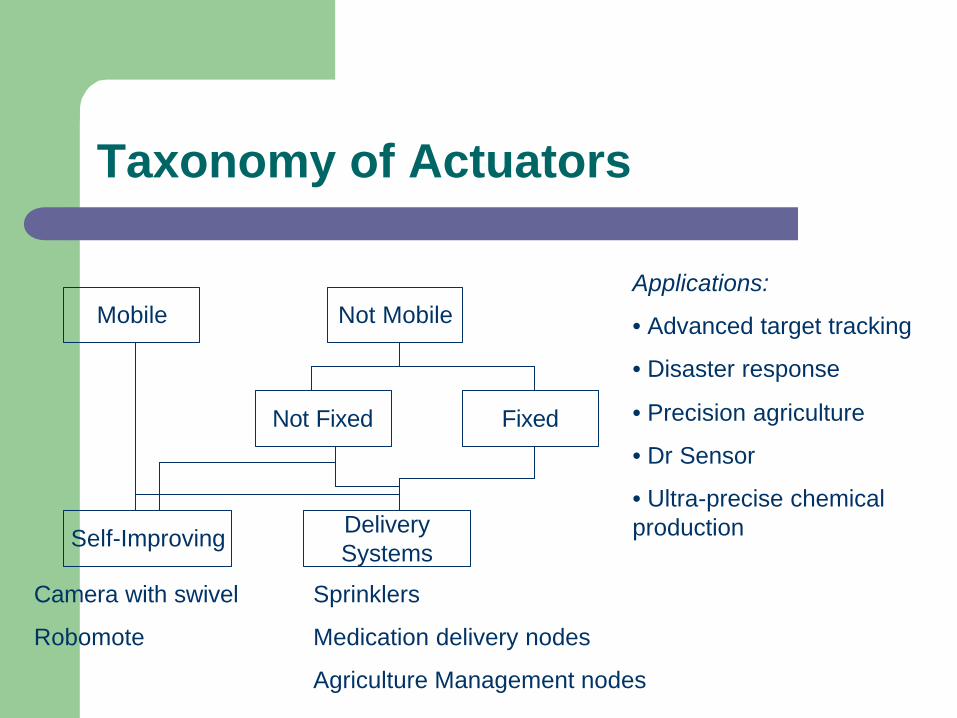
Mobile Not Mobile
Fixed
Self-Improving
Not Fixed
DeliverySystems
Camera with swivel
Robomote
Sprinklers
Medication delivery nodes
Agriculture Management nodes
Applications:
• Advanced target tracking
• Disaster response
• Precision agriculture
• Dr Sensor
• Ultra-precise chemical production
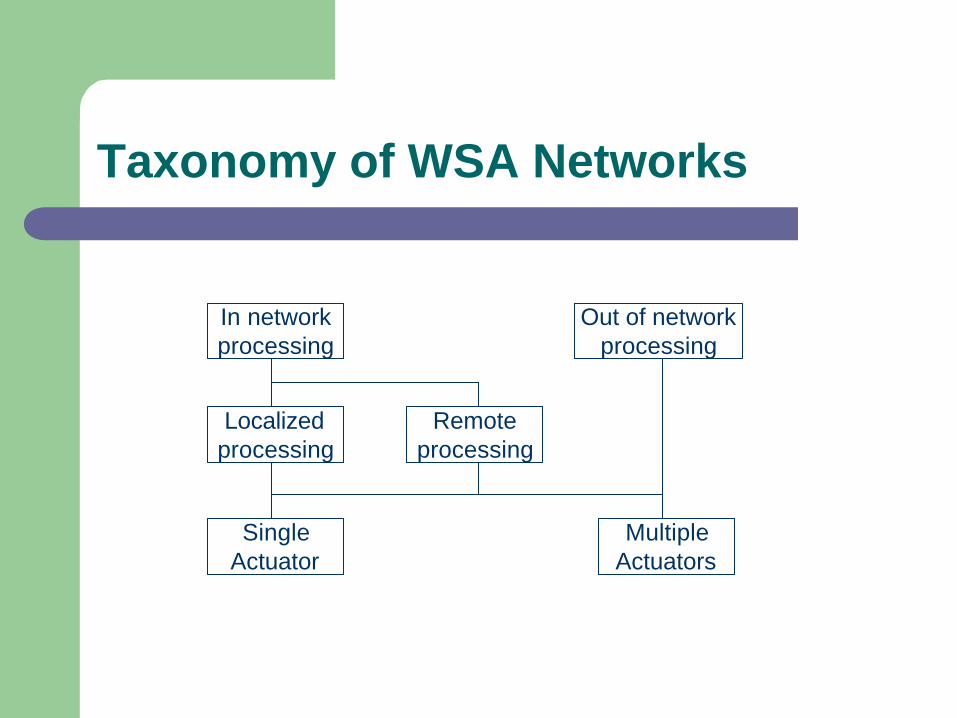
Taxonomy of WSA Networks
In networkprocessing
Out of networkprocessing
Localizedprocessing
Remoteprocessing
SingleActuator
MultipleActuators
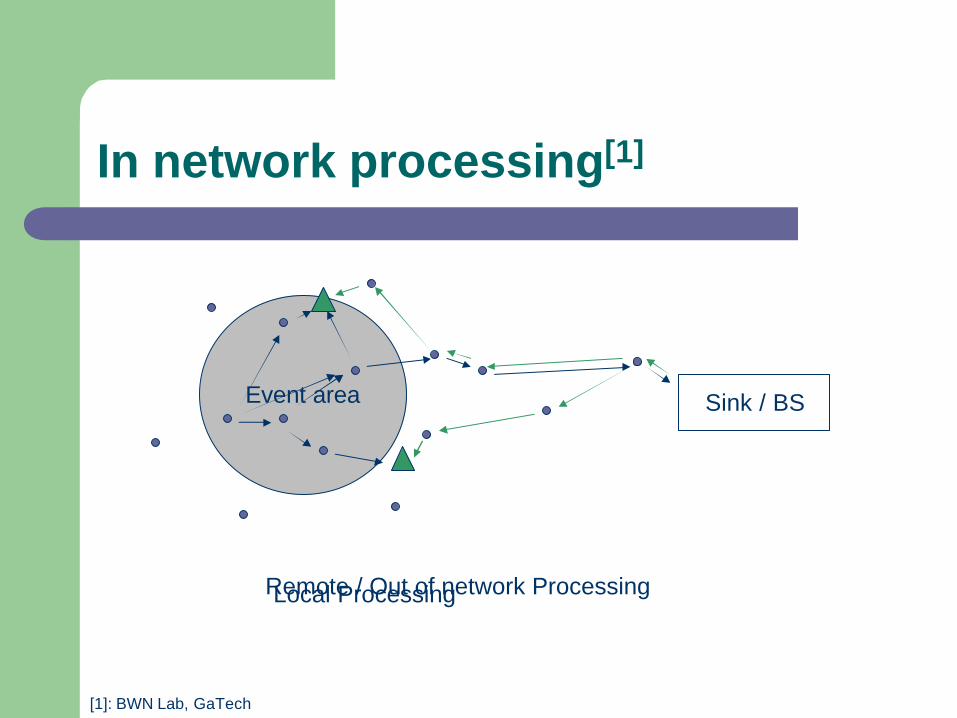
In network processing[1]
Event area Sink / BS
Local ProcessingRemote / Out of network Processing
[1]: BWN Lab, GaTech
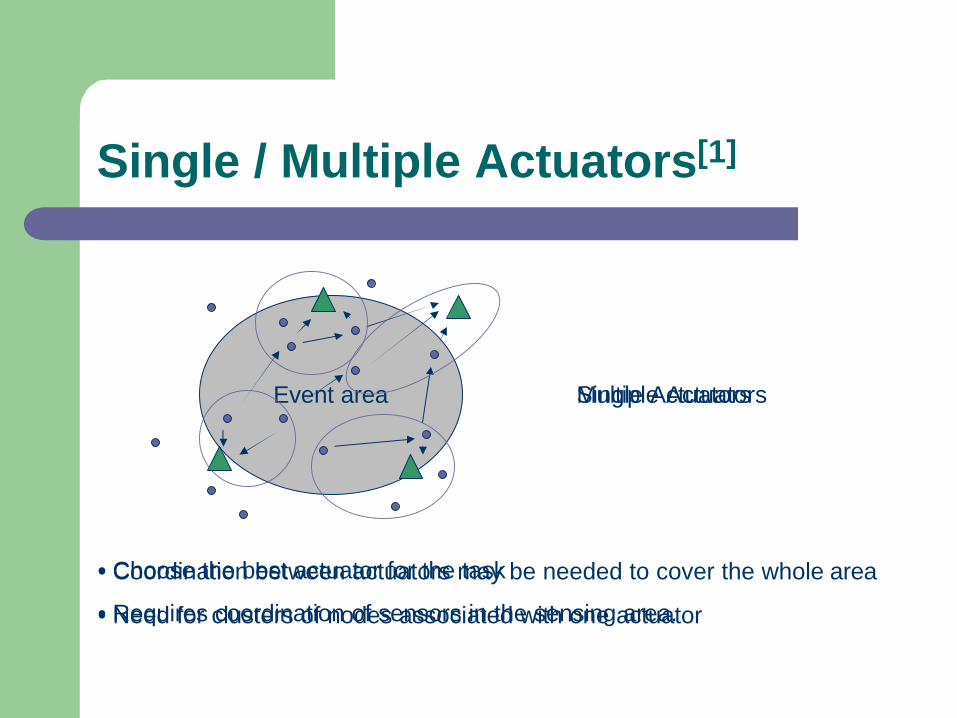
Single / Multiple Actuators[1]
Event area Single ActuatorsMultiple Actuators
• Choose the best actuator for the task
• Requires coordination of sensors in the sensing area.
• Coordination between actuators may be needed to cover the whole area
• Need for clusters of nodes associated with one actuator
Actuator – actuator coordination[1]
l Communication between actuators similar to nodes in networks
l Actuator-actuator comm. needed if actuator cannot act (low energy, small action range…)
l Need to find the best (set of) actuator(s) for the task at hand: exact number of actuators, capabilities vs. task (Distributed Decision)
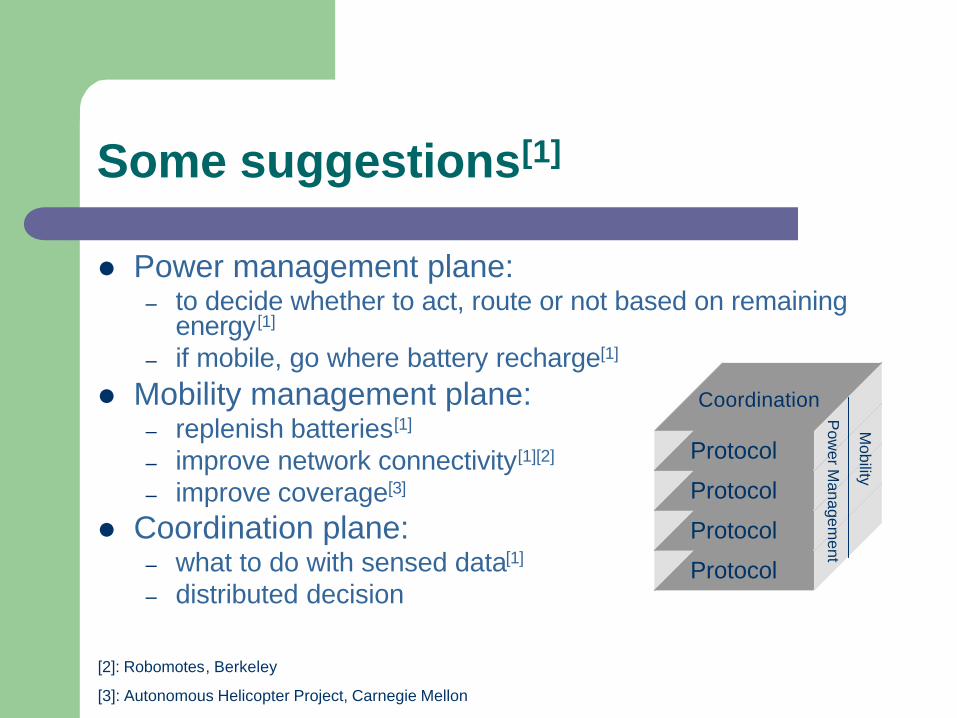
Some suggestions[1]
l Power management plane:– to decide whether to act, route or not based on remaining
energy [1]
– if mobile, go where battery recharge[1]
l Mobility management plane:– replenish batteries[1]
– improve network connectivity[1][2]
– improve coverage[3]
l Coordination plane:– what to do with sensed data[1]
– distributed decision
[2]: Robomotes, Berkeley
[3]: Autonomous Helicopter Project, Carnegie Mellon
Protocol
Protocol
Protocol
Protocol
Pow
er Managem
ent
Mobility
Coordination
Constraints on protocols[1]
l Transport layer:– get accurate reports from sensors: exact type, location, intensity,
etc. Act according to reliability– aggregation and dissemination of sensed information reliably– reliable communications between actuators
l Routing layer:– route to sink, or coordinator, or actuator(s)– Ad-hoc routing can be used for actuator-actuator routing
l MAC layer:– Use mobility for connectivity between sensors and actuators
For all layers: deliver in timely manner!
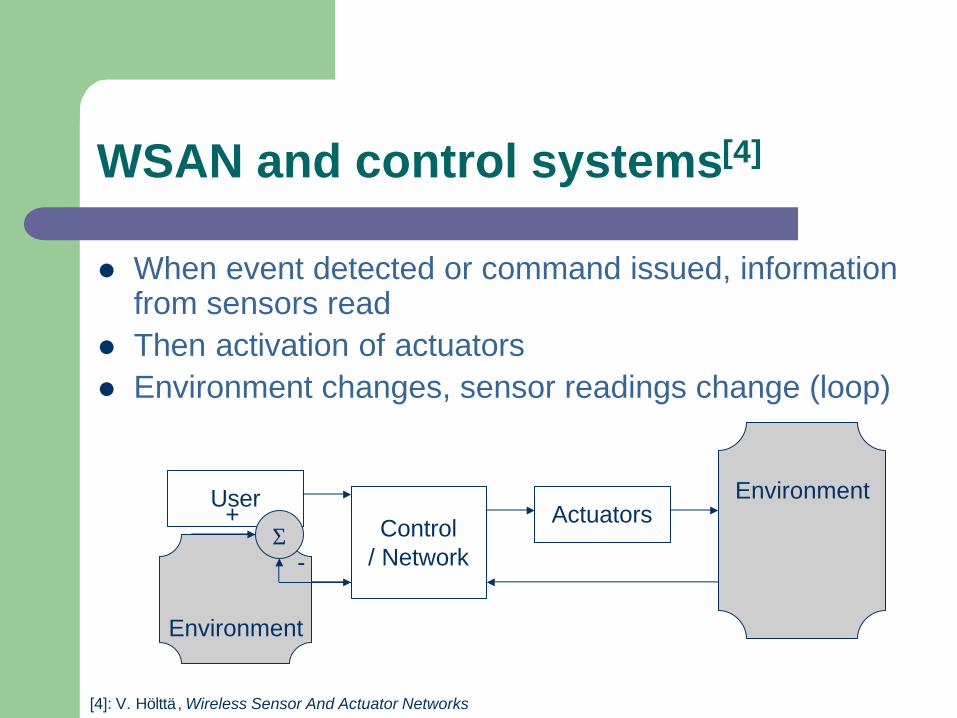
WSAN and control systems[4]
l When event detected or command issued, information from sensors read
l Then activation of actuatorsl Environment changes, sensor readings change (loop)
Control/ Network
Sensors
ActuatorsEnvironment
Environment
User
Σ+
-
[4]: V. Hölttä , Wireless Sensor And Actuator Networks
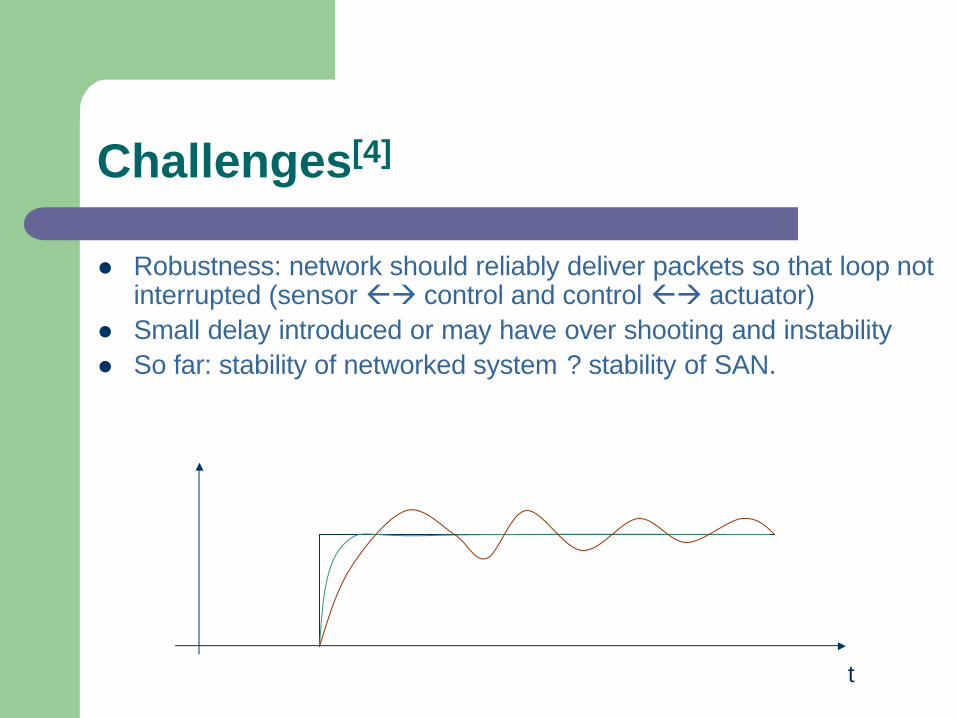
Challenges[4]
l Robustness: network should reliably deliver packets so that loop not interrupted (sensor ßà control and control ßà actuator)
l Small delay introduced or may have over shooting and instabilityl So far: stability of networked system ? stability of SAN.
t
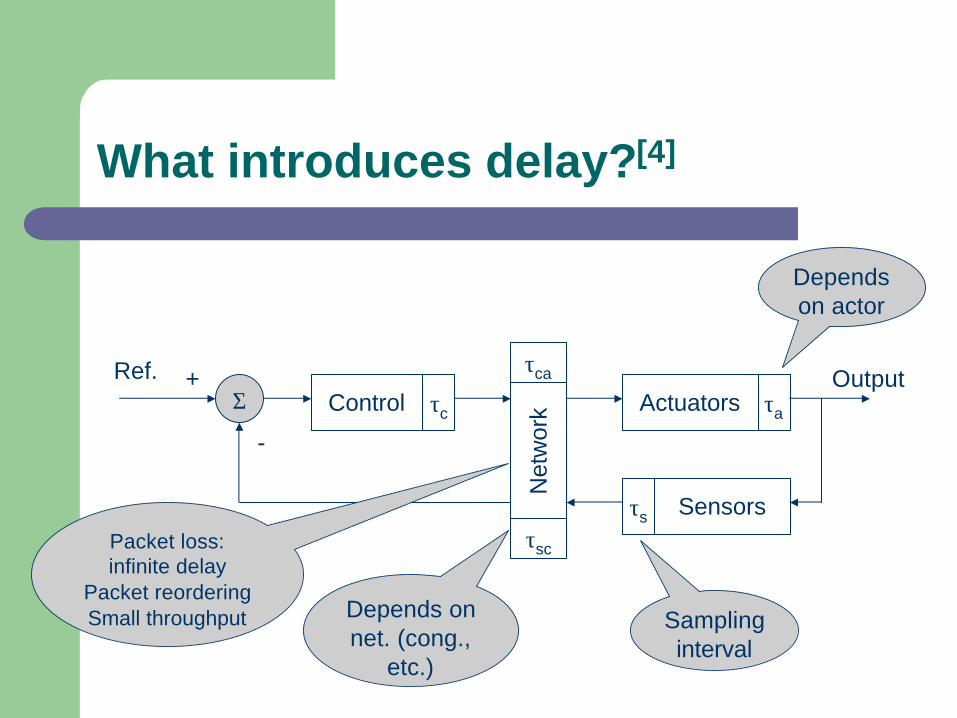
What introduces delay?[4]
Control ActuatorsΣ+
-
τa
SensorsτsN
etw
ork
τca
τsc
τc
Ref. Output
Sampling interval
Depends on actor
Depends on net. (cong.,
etc.)
Packet loss: infinite delay
Packet reorderingSmall throughput
In network decision[6]
l Stringent delay constraints in event detectionl Aggregation within one cell of grid and 2-level
aggregationl Consider anycast: if event received by any actuator =
successl Pick next-hop that guarantees timely delivery (calculates
how far actuator is)l Other protocols[7] propose building tree rooted at event
(in fact all sensor nodes maintain table of closest actuators)
l Dynamically assign actuators to region with more events
[6]: Ngai, Zhou, Lyu, and Liu, “Reliable Reporting of Delay-Sensitive Events in WSAN”
[7]: Hu, Bulusu, and Jha, “A Communication Paradigm for Hybrid Sensor/Actuator Networks”
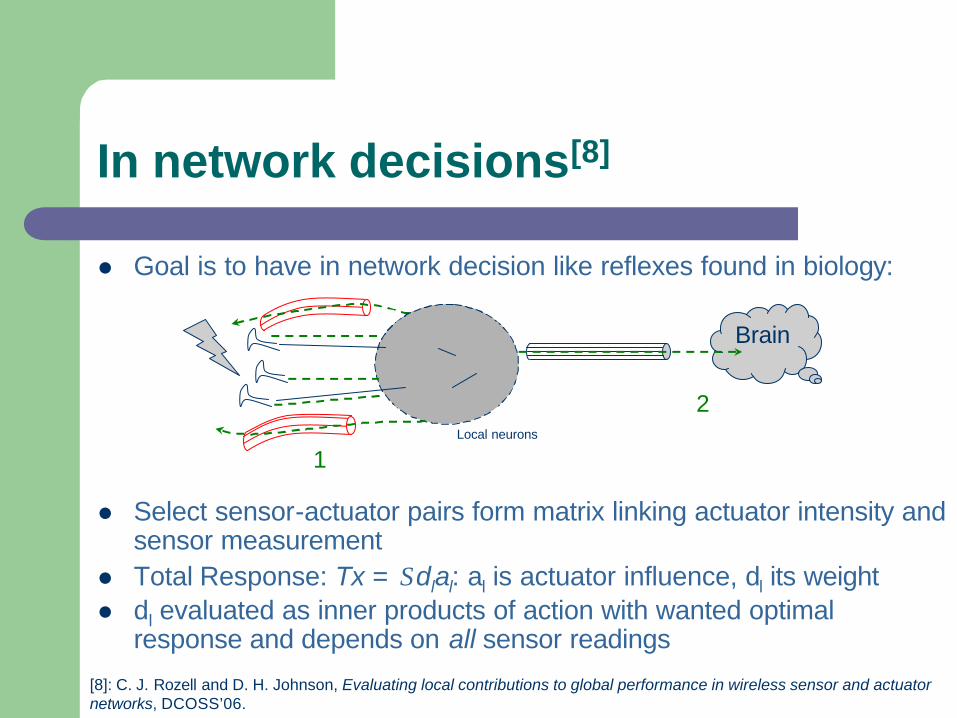
In network decisions[8]
l Goal is to have in network decision like reflexes found in biology:
l Select sensor-actuator pairs form matrix linking actuator intensity and sensor measurement
l Total Response: Tx = Σdlal: al is actuator influence, dl its weightl dl evaluated as inner products of action with wanted optimal
response and depends on all sensor readings
[8]: C. J. Rozell and D. H. Johnson, Evaluating local contributions to global performance in wireless sensor and actuator networks, DCOSS’06.
Brain
Local neurons
1
2
In network decisions[8]
l è Too many connections required!l Sensors quantify impact of removing sensor i reading on
resulting action Tx using frame theory (inner product of reconstruction basis and actuator influence).
l è maps expected response to (fixed) event to connection diagrams between sensors and actuators
l Non-adaptive, a-priori choose sensor-actuator communication links.
l Sensors and actuators form two basis (measurement and action), not ortho-normal: frames. Sensors have action frame, actuators reconstruction frame.
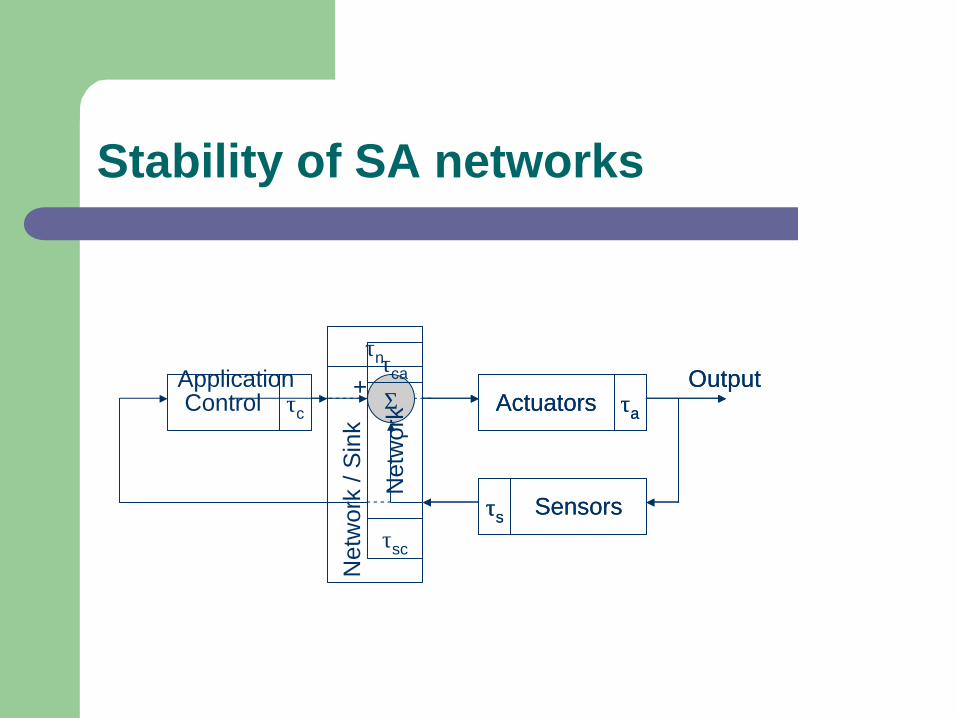
Stability of SA networks
ActuatorsΣ+
-τa
Sensorsτs
Net
wor
k / S
ink
τnOutputApplication
Control Actuators τa
Sensorsτs
Net
wor
kτca
τsc
τc
Output
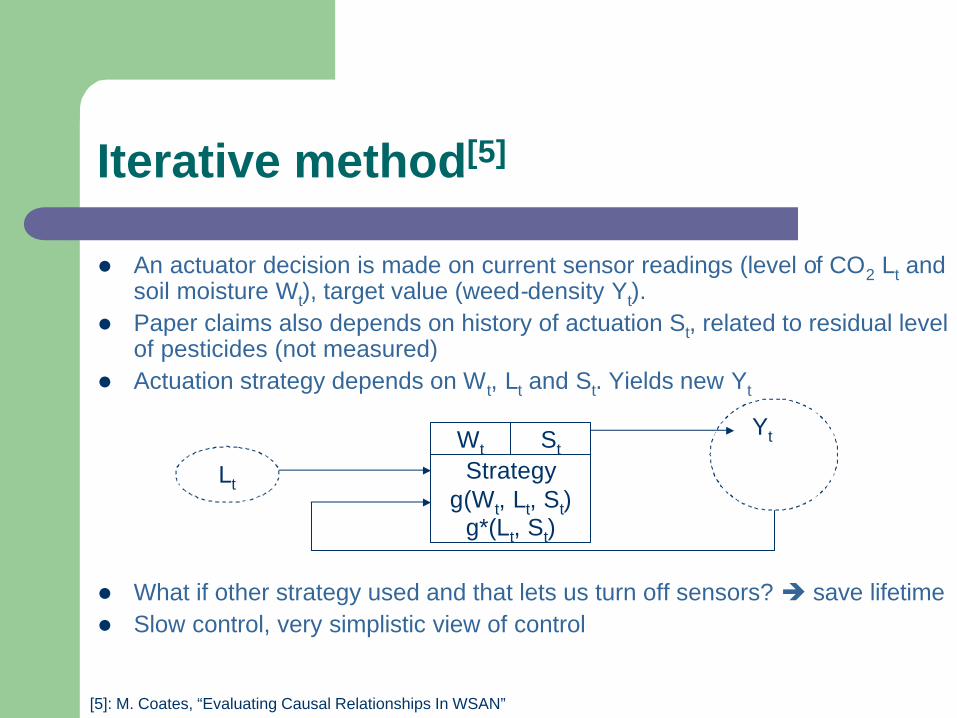
Iterative method[5]
l An actuator decision is made on current sensor readings (level of CO2 Lt and soil moisture Wt), target value (weed-density Yt).
l Paper claims also depends on history of actuation St, related to residual level of pesticides (not measured)
l Actuation strategy depends on Wt, Lt and St. Yields new Yt
Strategyg(Wt, Lt, St)
g*(Lt, St)
Yt
Lt
Wt St
l What if other strategy used and that lets us turn off sensors? è save lifetimel Slow control, very simplistic view of control
[5]: M. Coates, “Evaluating Causal Relationships In WSAN”
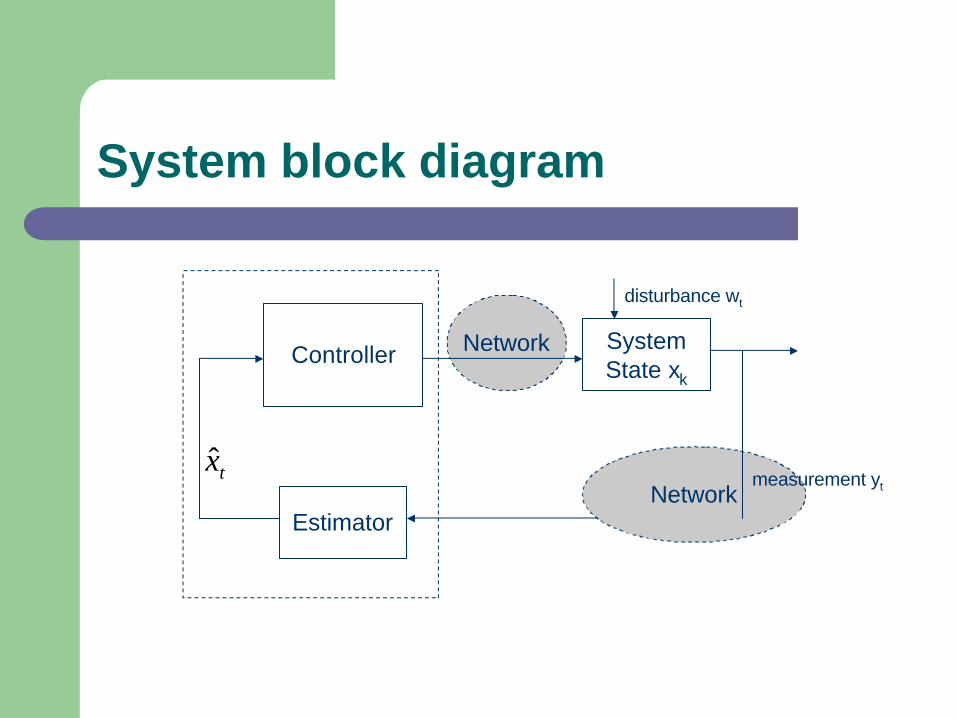
System block diagram
SystemState xk
Estimator
Controller
Network
Network
disturbance wt
measurement yttx̂
Controller design and analysisNoisy and missing measurements
l Estimator may use a Kalman filter: recursive filter that estimates state of dynamic system from incomplete and noisy measurements
l Kalman filter yields minimum mean square error estimate based on received sensor measurements
l Controller calculates control command from estimate (usually in linear systems only need closed-loop gain matrix)
Controller design and analysisNetwork-induced delays
l [9] studies the stability of networked CS in presence of network delay and packet drop out
l Establishes the stability regions as function of sampling interval and net. delay
l When packets lost, estimate state of system and evaluate stability
[9]: W. Zhang, M. S. Branicky, and S. M. Phillips, “Stability of Networked Control Systems”, IEEE Control Sys. Mag. 2001
Potential research direction
l Soliciting the right actuators for a response
l Analysis of stability when control is within the network (a sensor node)
l Deciding who should be control