intrusion detection system using gated recurrent …
TRANSCRIPT

INTRUSION DETECTION SYSTEM USING GATED
RECURRENT NEURAL NETWORKS
A Project report submitted in partial fulfillment of the requirements for
the award of the degree of
BACHELOR OF TECHNOLOGY
IN
COMPUTER SCIENCE ENGINEERING
Submitted by
D. KIRAN MAHESH REDDY (316126510073)
B. DEEPIKA (316126510127)
G. ALEKHYA (316126510140)
CH. NAGA VENNELA (316126510134)
Under the guidance of
Mrs. G. PRANITHA
ASSISTANT PROFESSOR
DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING
ANIL NEERUKONDA INSTITUTE OF TECHNOLOGY AND SCIENCES
(UGC AUTONOMOUS)
(Permanently Affiliated to AU, Approved by AICTE and Accredited by NBA & NAAC with ‘A’ Grade)
Sangivalasa, bheemili mandal, visakhapatnam dist. (A.P)
2019-2020

DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING
ANIL NEERUKONDA INSTITUTE OF TECHNOLOGY AND SCIENCES
(UGC AUTONOMOUS)
(Affiliated to AU, Approved by AICTE and Accredited by NBA & NAAC with ‘A’
Grade)
Sangivalasa, Bheemili Mandal, Visakhapatnam dist.(A.P)
BONAFIDE CERTIFICATE
This is to certify that the project report entitled “INTRUSION DETECTION SYSTEM
USING GATED RECURRENT NEURAL NETWORKS” submitted by D. KIRAN
MAHESH REDDY (316126510073), B. DEEPIKA (316126510127), G. ALEKHYA
(316126510140), CH. NAGA VENNELA (316126510134) in partial fulfillment of the
requirements for the award of the degree of Bachelor of Technology in Computer Science
Engineering of Anil Neerukonda Institute of technology and sciences (A), Visakhapatnam
is a record of bonafide work carried out under my guidance and supervision.
Project Guide Head of the Department
Mrs. G. PRANITHA Dr. R. SIVARANJANI
Assistant Professor Professor
Department of CSE Department of CSE
ANITS ANITS

DECLARATION
We, D. KIRAN MAHESH REDDY, B. DEEPIKA, G. ALEKHYA, CH. NAGA
VENNELA, of final semester B.Tech, in the department of Computer Science and
Engineering from ANITS, Visakhapatnam, hereby declare that the project work entitled
“INTRUSION DETECTION SYSTEM USING GATED RECURRENT NEURAL
NETWORKS” is carried out by us and submitted in partial fulfillment of the requirements
for the award of Bachelor of Technology in Computer Science Engineering , under Anil
Neerukonda Institute of Technology & Sciences(A) during the academic year 2016-2020
and has not been submitted to any other university for the award of any kind of degree.
D. KIRAN MAHESH REDDY 316126510073
B. DEEPIKA 316126510127
G. ALEKHYA 316126510140
CH. NAGA VENNELA 316126510134

ACKNOWLEDGEMENT
We would like to express our deep gratitude to our project guide Mrs. G. Pranitha,
Assistant Professor, Department of Computer Science and Engineering, ANITS, for her
guidance with unsurpassed knowledge and immense encouragement. We are grateful to
Dr. R. Sivaranjani, Head of the Department, Computer Science and Engineering, for
providing us with the required facilities for the completion of the project work.
We are very much thankful to the Principal and Management, ANITS,
Sangivalasa, for their encouragement and cooperation to carry out this work.
We also thank our Project Coordinator Mrs. K. S. Deepthi for her support and
encouragement. We express our thanks to all teaching faculty of Department of Computer
Science and Engineering, whose suggestions during reviews helped us in accomplishment
of our project. We would like to thank Mrs. Udaya Lakshmi of the Department of
Computer Science and Engineering for providing us the lab resources in accomplishment
of our project.
We would like to thank our parents, friends, and classmates for their encouragement
throughout our project period. At last but not the least, we thank everyone for supporting
us directly or indirectly in completing this project successfully.
D. KIRAN MAHESH REDDY (316126510073)
B. DEEPIKA (316126510127)
G. ALEKHYA (316126510140)
CH. NAGA VENNELA (316126510134)

i
ABSTRACT
As use of the internet and related technologies which are spreading around the
world, the use of these networks now creates new threats for organizations. An Intrusion
detection system (IDS) plays a major role in preserving network security. So, we proposed
a deep learning-based Intrusion Detection System using recurrent neural networks with
gated recurrent units (GRU-IDS). The dataset used for evaluating the GRU-IDS is that the
NSL-KDD dataset. To reduce the dimensionality of the NSL-KDD dataset we used a
Random Forest classifier for feature selection. The experimental result suggests that the
performance of GRU-IDS is superior compared to traditional machine learning
classification methods.
Keywords- Intrusion detection, Recurrent Neural Network, Gated Recurrent Unit, GRU-
IDS, machine learning, deep learning.
ii
CONTENTS
TITLE Page No.
ABSTRACT i
LIST OF SYMBOLS v
LIST OF FIGURES vi
LIST OF TABLES viii
LIST OF ABBREVATIONS ix
CHAPTER 1. INTRODUCTION
1.1 Introduction 1
1.1.1 Intrusion Detection System 1
1.1.1.1 Types of Intrusion Detection System 2
1.1.1.2 Detection Methods of IDS 3
1.1.2 Machine Learning 3
1.1.2.1 Supervised Learning 4
1.1.2.2 Unsupervised Learning 6
1.1.2.3 Reinforcement Learning 7
1.1.3 Deep Learning 7
1.1.4 Neural Networks 8
1.1.5 Recurrent Neural Networks 9
1.1.5.1 Long Short-Term Memory 12
1.1.5.2 Gated Recurrent Unit 14
1.1.6 Random Forest Classifier 16
1.2 Motivation for the work 17
1.3 Problem Statement 17
1.4 Organization of the thesis 18
CHAPTER 2. LITERATURE SURVEY
2.1 Detailed Analysis on NSL-KDD Dataset Using Various Machine Learning
techniques
19
2.2 Performance Analysis of NSL-KDD dataset using ANN 19

iii
2.3 Ensemble Model for Classification of Attacks with Feature Selection 20
2.4 Feature Selection for Intrusion Detection using NSL-KDD 21
2.5 Deep Long Short-term memory-based classifier for wireless IDS 21
2.6 Deep Learning method with filter-based feature engineering for Wireless IDS 21
2.7 Study on NSL-KDD Dataset for IDS based on Classification Algorithms 22
2.8 Random Forest Modelling for Network Intrusion Detection System 22
2.9 Intrusion Detection System using Data Mining Technique 23
2.10 An Artificial Neural Network based IDS and Classification of Attacks 23
2.11 An effective IDS classifier using LSTM with gradient descent optimization 24
2.12 Existing System
24
CHAPTER 3. METHODOLOGY
3.1 Proposed System 25
3.1.1 System Architecture 25
3.1.2 Dataset Description 25
3.1.3 Flow of the System 31
3.1.4 Data Preprocessing 31
3.1.4.1 Conversion of Non-Numeric to numeric values 31
3.1.4.2 Normalization 32
3.1.5 Feature Selection 32
3.1.6 Working of Gated Recurrent Neural Network 34
3.2 Adam Optimizer 40
3.3 Hyper Parameter 41
3.4 Activation Functions 43
3.5 Evaluation Measures
47
CHAPTER 4. EXPERIMENTAL ANALYSIS AND RESULTS
4.1 System Configuration 49
4.1.1 Software Requirements 49
4.1.2 Hardware Requirements 55

iv
4.2 Sample Code Elaboration 56
4.2.1 Importing the required packages 56
4.2.2 Loading the NSL-KDD dataset 56
4.2.3 Conversion of symbolic features to numeric values 56
4.2.4 Normalization 57
4.2.5 Feature selection using Random Forest Classifier 58
4.2.6 Building the GRU-IDS model 59
4.3 Screenshots 63
4.4 Experimental Analysis and Results
69
CHAPTER 5. CONCLUSION AND FUTURE WORK
5.1 Conclusion 70
5.2 Future work 70
REFERENCES 71
APPENDICES 74

v
LIST OF SYMBOLS
∑ Summation
𝜎 Sigmoid Function
⊙ Hadamard Product
® Registered Trademark

vi
LIST OF FIGURES
Figure No. Topic Name Page No.
1.1 Machine Learning vs Traditional Programming 4
1.2 Neuron 9
1.3 Basic Neural Network 10
1.4 Unfolded Structure of Recurrent Neural Networks 11
1.5 LSTM Cell 13
1.6 GRU Cell 15
3.1 Proposed System 25
3.2 Flow of the System 31
3.3 Working of Random Forest Classifier 34
3.4 Recurrent Neural Network with Gated Recurrent Unit 34
3.5 Gated Recurrent Unit 35
3.6 Update Gate 36
3.7 Reset Gate 37
3.8 Current Memory Gate 38
3.9 Final Memory Gate 39
4.1 Performance of the GRU-IDS model on the training dataset for
epoch 30.
63
4.2 Performance of the GRU-IDS model on the test dataset for epoch
number 30.
63
4.3 Performance of the GRU-IDS model on the training dataset for
epoch number 60.
64
4.4 Performance of the GRU-IDS model on the test dataset for epoch
number 60.
64
4.5 Performance of the GRU-IDS model on the training dataset for
epoch number 120.
65
4.6 Performance of the GRU-IDS model on the test dataset for epoch
number 120.
65

vii
4.7 Performance of the GRU-IDS model on the training dataset for
epoch number 180.
66
4.8 Performance of the GRU-IDS model on the test dataset for epoch
number 180.
66
4.9 Performance of the GRU-IDS model on the training dataset for
epoch number 200.
67
4.10 Performance of the GRU-IDS model on the test dataset for epoch
number 200.
67
4.11 Performance of the GRU-IDS model on the training dataset for
epoch number 300.
68
4.12 Performance of the GRU-IDS model on the test dataset for epoch
number 300.
68

viii
LIST OF TABLES
Table No. Topic Name Page No.
3.1 Features of NSL-KDD Dataset 26
3.2 Confusion Matrix 46
4.1 Performance measures of the existing systems 69
4.2 Performance measures of the proposed system 69

ix
LIST OF ABBREVATIONS
IDS Intrusion Detection System
IDPS Intrusion Detection and Prevention System
NIDS Network Intrusion Detection System
HIDS Host Intrusion Detection System
SVM Support Vector Machine
ANN Artificial Neural Networks
KNN k-nearest neighbor
ML Machine Learning
RL Reinforcement Learning
AI Artificial Intelligence
DBN Deep Belief Network
RNN Recurrent Neural Network
LSTM Long Short-Term Memory
GRU Gated Recurrent Unit
RF Random Forest
KDD Knowledge Discovery in Databases
DLSTM Deep Long Short-Term Memory
FFDNN Feed Forward Deep Neural Network
SGD Stochastic Gradient Descent
RMSprop Root Mean Square Propagation
AC Accuracy
TP True Positive
FP False Positive
TN True Negative
FN False Negative
TPR True Positive Rate
DR Detection Rate
PR Precision
FPR False Positive Rate

1
1. INTRODUCTION
1.1. INTRODUCTION
We are now living in a borderless world where there is nothing to break-in i.e, either
the building or computer system. Even though the technology is being elevated, it also has
given rise to new vulnerabilities and threats to the organizations. Intrusion detection system
(IDS) is a type of security management system for computers and networks. An intrusion
detection system (IDS) inspects all outbound and inbound network actions and finds out
the doubtful patterns that may point to network or system intrusion or attack from someone
trying to crack into or conciliate a system. The traditional machine learning technologies
like SVMs, ANNs, Random Forest, Naive Bayes, KNN and J48 have shown good results
in intrusion detection but also have some limitations in performance accuracy. To improve
the performance in intrusion detection we introduced a deep learning-based recurrent
neural network with gated recurrent units. So, we have decided to build up an IDS model
which can detect any abnormal behavior in the network.
1.1. 1. INTRUSION DETECTION SYSTEM
An Intrusion Detection System (IDS) is a system that monitors network traffic for
suspicious activity and issues alerts when such activity is discovered. It is a software
application that scans a network or a system for harmful activity or policy breaching.
Intrusion refers to an unauthorized access to a system or a service by compromising the
system to enter an insecure state. An Intrusion can be featured in terms of Confidentiality,
Integrity, Availability. Confidentiality indicates protecting information from an
unauthorized user. Integrity ensures that the data is accurate and safe guarded even after an
intruder’s modification. Availability brings up the ability to the user to access information
in correct format. The user who does intrusion is called an intruder, who leaves some traces
which are being detected by an Intrusion detection system. Although intrusion detection
systems monitor networks for potentially malicious activity, they are also disposed to false
alarms. Hence, organizations need to fine-tune their IDS products when they first install
them. It means properly setting up the intrusion detection systems to recognize what normal
traffic on the network looks like as compared to malicious activity. Intrusion detection

2
systems offer organizations several benefits, starting with the ability to identify security
incidents. An IDS can be used to help analyze the quantity and types of attacks;
organizations can use this information to change their security systems or implement more
effective controls. An intrusion detection system can also help companies identify bugs or
problems with their network device configurations. These metrics can then be used to
assess future risks. Historically, intrusion detection systems were categorized as passive or
active. A passive IDS that detected malicious activity would generate alert or log entries
but would not take action; an active IDS, sometimes called an intrusion detection and
prevention system (IDPS), would generate alerts and log entries but could also be
configured to take actions, like blocking IP addresses or shutting down access to restricted
resources.
1.1.1.1. TYPES OF INTRUSION DETECTION SYSTEM
• Network Intrusion Detection System (NIDS)
Network intrusion detection systems (NIDS) are set up at a planned point
within the network to examine traffic from all devices on the network. It performs
an observation of passing traffic on the entire subnet and matches the traffic that is
passed on the subnets to the collection of known attacks. Once an attack is identified
or abnormal behavior is observed, the alert can be sent to the administrator. An
example of an NIDS is installing it on the subnet where firewalls are located in
order to see if someone is trying crack the firewall.
• Host Intrusion Detection System (HIDS):
Host intrusion detection systems (HIDS) run on independent hosts or devices
on the network. A HIDS monitors the incoming and outgoing packets from the
device only and will alert the administrator if suspicious or malicious activity is
detected. A HIDS has an advantage over a NIDS in that it may be able to detect
anomalous network packets that originate from inside the organization or malicious
traffic that a NIDS has failed to detect. A HIDS may also be able to identify
malicious traffic that originates from the host itself, such as when the host has been
infected with malware and is attempting to spread to other systems.

3
1.1.1.2. DETECTION METHODS OF IDS:
The two primary methods of detection are signature-based and anomaly-based. Any type
of IDS can detect attacks based on signatures, anomalies, or both.
• Signature-based IDS detects the attacks based on the specific patterns such as
number of bytes or number of 1’s or number of 0’s in the network traffic. It also
detects based on the already known malicious instruction sequence that is used by
the malware. The detected patterns in the IDS are known as signatures. It can easily
detect the attacks whose pattern (signature) already exists in system but it is quite
difficult to detect the new malware attacks as their pattern (signature) is not known.
• Anomaly-based IDS was introduced to detect the unknown malware attacks as
new malware are developed rapidly. In anomaly-based IDS there is use of machine
learning to create a trustful activity model and anything coming is compared with
that model and it is declared suspicious if it is not found in model. Machine learning
based method has a better generalized property in comparison to signature-based
IDS as these models can be trained according to the applications and hardware
configurations.
1.1.2. MACHINE LEARNING:
Machine Learning is undeniably one of the most influential and powerful
technologies in today’s world. More importantly, we are far from seeing its full potential.
Machine Learning is a concept which allows the machine to learn from examples and
experiences. It is a subset of Artificial Intelligence that comprises algorithms programmed
to gather information without explicit instructions at each step. Machine learning is a tool
for turning information into knowledge and is transforming the world by enabling machines
to do all sorts of ‘intelligent’ tasks such as understanding images, human speech, predicting
preferences and many others. With tremendous amount of data, interconnectedness and
huge processing power in small devices, machines are doing things which were not
anticipated until recently. In the past 50 years, there has been an explosion of data. This
mass of data is useless unless we analyze it and find the patterns hidden within. Machine
learning techniques are used to automatically find the valuable underlying patterns within
complex data that we would otherwise struggle to discover. The hidden patterns and

4
knowledge about a problem can be used to predict future events and perform all kinds of
complex decision making. Machine Learning algorithm is trained using a training data set
to create a model. When new input data is introduced to the ML algorithm, it makes a
prediction on the basis of model. The prediction is evaluated for accuracy and if the
accuracy is acceptable, the Machine Learning algorithm is deployed, If the accuracy is not
acceptable, the Machine Learning algorithm is trained again and again with an augmented
training data set.
Figure 1.1 Machine Learning vs Traditional Programming
Types of Machine Learning Algorithms
1. Supervised learning – Train Me!
2. Unsupervised Learning – I am self-sufficient in learning
3. Reinforcement Learning – My life My rules!
1.1.2.1 SUPERVISED LEARNING
Supervised learning is the most popular paradigm for machine learning. It is the
easiest to understand and the simplest to implement. It is the machine learning task of
learning a function that maps an input to an output based on example input-output pairs. It
infers a function from labelled training data consisting of a set of training examples. In
supervised learning, each example is a pair consisting of an input object (typically a vector)
and a desired output value (also called the supervisory signal). A supervised learning
algorithm analyses the training data and produces an inferred function, which can be used
for mapping new examples. Supervised Learning is very similar to teaching a child with the
given data and that data is in the form of examples with labels, we can feed a learning
algorithm with these example-label pairs one by one, allowing the algorithm to predict the
5
right answer or not. Over time, the algorithm will learn to approximate the exact nature of
the relationship between examples and their labels. When fully trained, the supervised
learning algorithm will be able to observe a new, never-before-seen example and predict a
good label for it.
Most of the practical machine learning uses supervised learning. Supervised
learning is where you have input variable (x) and an output variable (Y) and you use an
algorithm to learn the mapping function from the input to the output.
Y=f(x) (1)
The goal is to approximate the mapping function so well that when you have new
input data (x) that you can predict the output variables (Y) for the data. It is called
supervised learning because the process of an algorithm learning from the training dataset
can be thought of as a teacher supervising the learning process. Supervised learning is often
described as task oriented. It is highly focused on a singular task, feeding more and more
examples to the algorithm until it can accurately perform on that task. This is the learning
type that you will most likely encounter, as it is exhibited in many of the common
applications like Advertisement Popularity, Spam Classification, face recognition.
Two types of Supervised Learning are:
1. Regression:
Regression models a target prediction value based on independent
variables. It is mostly used for finding out the relationship between
variables and forecasting. Regression can be used to estimate/ predict continuous
values (Real valued output). For example, given a picture of a person then we must
predict the age based on the given picture.
2. Classification:
Classification means to group the output into a class. If the data
is discrete or categorical then it is a classification problem. For example, given data
about the sizes of houses in the real estate market, making our output about whether
the house “sells for more or less than the asking price” i.e. Classifying houses into
two discrete categories.

6
1.1.2.2 UNSUPERVISED LEARNING
Unsupervised Learning is a machine learning technique, where you do not need to
supervise the model. Instead, you need to allow the model to work on its own to discover
information. It mainly deals with the unlabeled data and looks for previously undetected
patterns in a data set with no pre-existing labels and with a minimum of human supervision.
In contrast to supervised learning that usually makes use of human-labeled data,
unsupervised learning, also known as self-organization, allows for modelling of probability
densities over inputs.
Unsupervised machine learning algorithms infer patterns from a dataset without
reference to known or labeled outcomes. It is the training of machine using information
that is neither classified nor labeled and allowing the algorithm to act on that information
without guidance. Here the task of machine is to group unsorted information according to
similarities, patterns, and differences without any prior training of data. Unlike supervised
learning, no teacher is present that means no training will be given to the machine.
Therefore, machine is restricted to find the hidden structure in unlabeled data by our-self.
For example, if we provide some pictures of dogs and cats to the machine to categorized,
then initially the machine has no idea about the features of dogs and cats, so it categorizes
them according to their similarities, patterns and differences. The Unsupervised Learning
algorithms allows you to perform more complex processing tasks compared to supervised
learning. Although, unsupervised learning can be more unpredictable compared with other
natural learning methods.
Unsupervised learning problems are classified into two categories of algorithms:
• Clustering: A clustering problem is where you want to discover the inherent
groupings in the data, such as grouping customers by purchasing behavior.
• Association: An association rule learning problem is where you want to discover
rules that describe large portions of your data, such as people that buy X also tend
to buy Y.

7
1.1.2.3 REINFORCEMENT LEARNING
Reinforcement Learning (RL) is a type of machine learning technique that enables
an agent to learn in an interactive environment by trial and error using feedback from its
own actions and experiences. Machine mainly learns from past experiences and tries to
perform best possible solution to a certain problem. It is the training of machine learning
models to make a sequence of decisions. Though both supervised and reinforcement
learning use mapping between input and output, unlike supervised learning where the
feedback provided to the agent is correct set of actions for performing a task, reinforcement
learning uses rewards and punishments as signals for positive and negative behavior.
Reinforcement learning is currently the most effective way to hint machine’s creativity.
1.1.3. DEEP LEARNING
Deep learning is a branch of machine learning which is completely based
on artificial neural networks, as neural network is going to mimic the human brain so deep
learning is also a kind of mimic of human brain. In deep learning, we don’t need to
explicitly program everything. The concept of deep learning is not new. It has been around
for a couple of years now. It is on hype nowadays because earlier we did not have that
much processing power and a lot of data. As in the last 20 years, the processing power
increases exponentially, deep learning and machine learning came in the picture.
Deep learning is an artificial intelligence function that imitates the workings of the
human brain in processing data and creating patterns for use in decision making. Deep
learning is a subset of machine learning in artificial intelligence (AI) that has networks
capable of learning unsupervised from data that is unstructured or unlabelled. It has a
greater number of hidden layers and known as deep neural learning or deep neural network.
Deep learning has evolved together with the digital era, which has brought about an
explosion of data in all forms and from every region of the world. This data, known simply
as big data, is drawn from sources like social media, internet search engines, e-
commerce platforms, and online cinemas, among others. This enormous amount of data is
readily accessible and can be shared through fintech applications like cloud computing.
However, the data, which normally is unstructured, is so vast that it could take decades for
humans to comprehend it and extract relevant information. Companies realize the

8
incredible potential that can result from unravelling this wealth of information and are
increasingly adapting to AI systems for automated support. Deep learning learns from vast
amounts of unstructured data that would normally take humans decades to understand and
process. Deep learning utilizes a hierarchical level of artificial neural networks to carry out
the process of machine learning. The artificial neural networks are built like the human
brain, with neuron nodes connected like a web. While traditional programs build analysis
with data in a linear way, the hierarchical function of deep learning systems enables
machines to process data with a nonlinear approach.
Architectures:
1. Deep Neural Network – It is a neural network with a certain level of complexity
(having multiple hidden layers in between input and output layers). They are
capable of modelling and processing non-linear relationships.
2. Deep Belief Network (DBN) – It is a class of Deep Neural Network. It is multi-
layer belief networks.
Steps for performing DBN:
a. Learn a layer of features from visible units using
Contrastive Divergence algorithm.
b. Treat activations of previously trained features as visible
units and then learn features of features.
c. Finally, the whole DBN is trained when the learning for the
final hidden layer is achieved.
3. Recurrent (perform same task for every element of a sequence) Neural Network –
Allows for parallel and sequential computation. Like the human brain (large
feedback network of connected neurons). They can remember important things
about the input they received and hence enables them to be more precise.
1.1.4. NEURAL NETWORKS
Neural Network (or Artificial Neural Network) can learn by examples. ANN is an
information processing model inspired by the biological neuron system. ANN biologically
inspired simulations that are performed on the computer to do a certain specific set of tasks
like clustering, classification, pattern recognition etc. It is composed of many highly

9
interconnected processing elements known as the neuron to solve problems. It follows the
non-linear path and process information in parallel throughout the nodes. A neural network
is a complex adaptive system. Adaptive means it can change its internal structure by
adjusting weights of inputs.
Artificial Neural Networks can be best viewed as weighted directed graphs, where
the nodes are formed by the artificial neurons and the connection between the neuron
outputs and neuron inputs can be represented by the directed edges with weights. The ANN
receives the input signal from the external world in the form of a pattern and image in the
form of a vector. These inputs are then mathematically designated by the notations x(n) for
every n number of inputs. Each of the input is then multiplied by its corresponding weights
(these weights are the details used by the artificial neural networks to solve a certain
problem). These weights typically represent the strength of the interconnection amongst
neurons inside the artificial neural network. All the weighted inputs are summed up inside
the computing unit (yet another artificial neuron).
If the weighted sum equates to zero, a bias is added to make the output non-zero or
else to scale up to the system’s response. Bias has the weight and the input to it is always
equal to 1. Here the sum of weighted inputs can be in the range of 0 to positive infinity. To
keep the response in the limits of the desired values, a certain threshold value is
benchmarked. And then the sum of weighted inputs is passed through the activation
function. The activation function is the set of transfer functions used to get the desired
output of it. There are various flavors of the activation function, but mainly either linear or
non-linear set of functions. Some of the most used set of activation functions are the Binary,
Sigmoid (linear) and Tan hyperbolic sigmoidal (non-linear) activation functions.
Figure 1.2 Neuron
10
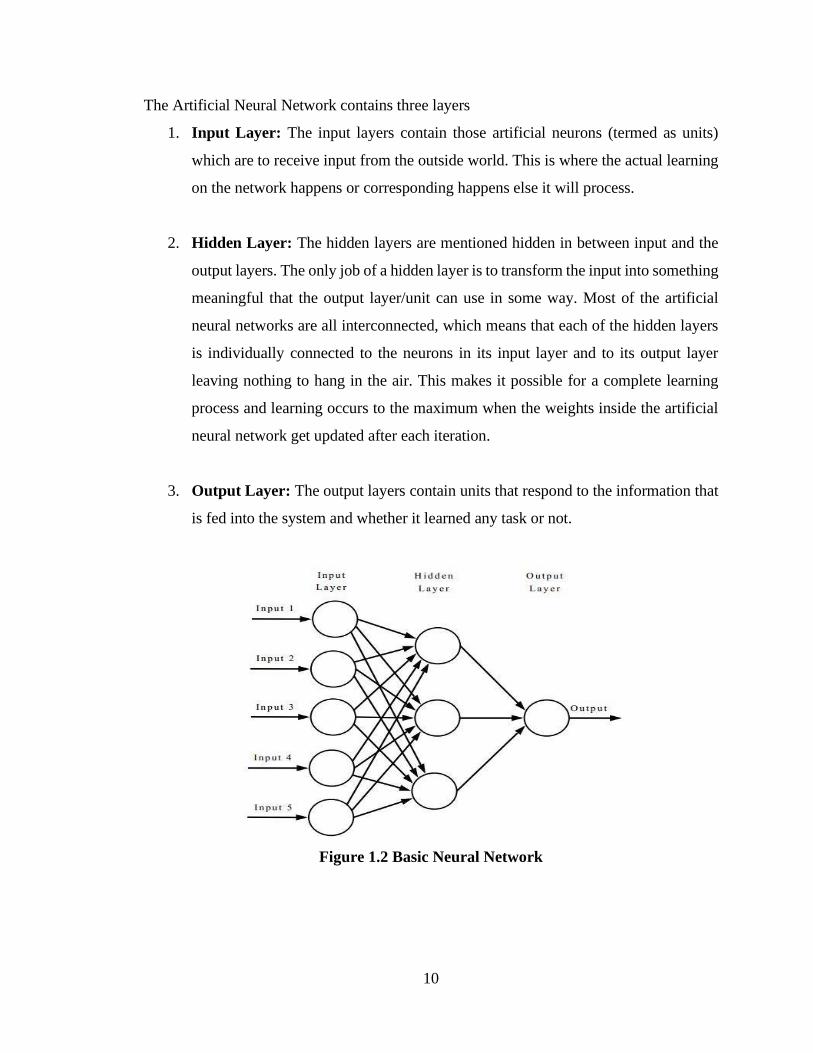
The Artificial Neural Network contains three layers
1. Input Layer: The input layers contain those artificial neurons (termed as units)
which are to receive input from the outside world. This is where the actual learning
on the network happens or corresponding happens else it will process.
2. Hidden Layer: The hidden layers are mentioned hidden in between input and the
output layers. The only job of a hidden layer is to transform the input into something
meaningful that the output layer/unit can use in some way. Most of the artificial
neural networks are all interconnected, which means that each of the hidden layers
is individually connected to the neurons in its input layer and to its output layer
leaving nothing to hang in the air. This makes it possible for a complete learning
process and learning occurs to the maximum when the weights inside the artificial
neural network get updated after each iteration.
3. Output Layer: The output layers contain units that respond to the information that
is fed into the system and whether it learned any task or not.
Figure 1.2 Basic Neural Network

11
1.1.5. RECURRENT NEURAL NETWORKS(RNN)
Recurrent Neural Network (RNN) are a type of Neural Network where the output
from previous step are fed as input to the current step. In traditional neural networks, all
the inputs and outputs are independent of each other, but in cases like when it is required
to predict the next word of a sentence, the previous words are required and hence there is
a need to remember the previous words. Thus, RNN came into existence, which solved this
issue with the help of a Hidden Layer. The main and most important feature of RNN
is Hidden state, which remembers some information about a sequence. A Recurrent Neural
Network (RNN) is a class of artificial neural networks where connections form a directed
graph along a temporal sequence. RNNs are used in deep learning and in the development
of models that simulate the activity of neurons in the human brain. An RNN consists of the
input layer, hidden layer, and an output layer. The main important feature of RNN is the
hidden state which acts like an interface between the input state and output state. RNNs are
different from the traditional feedforward neural networks because it consists of a
directional loop that acts as a memory for storing the previous state's information. Hidden
layers can be more than one depending upon the complexity of the project.
Figure 1.3 Unfolded Structure of Recurrent Neural Networks
The Recurrent Neural Network consists of two weight matrices. The weight matrix
W between the input layer and the hidden layer. The weight matrix U between the hidden
layer at time step t and the other hidden layer at time step t-1.

12
Formula for calculating current state:
ht = f (ht–1, xt) (2)
Where,
ht -> current state
ht-1 -> previous state
xt -> input state
Formula for current hidden state:
ht = tanh (Whh h t-1 + Wxh xt) (3)
Where,
Whh -> weight at recurrent neuron.
Wxh -> weight at input neuron.
Formula for calculating output:
yt = Why ht (4)
Where,
yt -> output
Why -> weight at output layer.
Advantages of Recurrent Neural Network:
1. An RNN remembers each information through time. It is useful in time series
prediction only because of the feature to remember previous inputs as well. This is
called Long Short-Term Memory.
2. Recurrent neural network is even used with convolutional layers to extend the
effective pixel neighbourhood.
Disadvantages of Recurrent Neural Network:
1. Gradient vanishing and exploding problems.
2. Training an RNN is a very difficult task.
3. It cannot process very long sequences if using tanh or relu as an activation function.
1.1.5.1 LONG SHORT-TERM MEMORY(LSTM)
To solve the problem of Vanishing and Exploding Gradients in a deep Recurrent
Neural Network, many variations were developed. One of the most famous of them is

13
the Long Short-Term Memory Network (LSTM). In concept, an LSTM recurrent unit tries
to “remember” all the past knowledge that the network is seen so far and to “forget”
irrelevant data. This is done by introducing different activation function layers called
“gates” for different purposes. Each LSTM recurrent unit also maintains a vector called
the Internal Cell State which conceptually describes the information that was chosen to be
retained by the previous LSTM recurrent unit. A Long Short-Term Memory Network
consists of four different gates for different purposes as described below: -
1. Forget Gate(f): It determines to what extent to forget the previous data.
2. Input Gate(i): It determines the extent of information to be written onto the
Internal Cell State.
3. Input Modulation Gate(g): It is often considered as a sub-part of the input gate
and many literatures on LSTM’s do not even mention it and assume it inside the
Input gate. It is used to modulate the information that the Input gate will write onto
the Internal State Cell by adding non-linearity to the information and making the
information Zero-mean. This is done to reduce the learning time as Zero-mean
input has faster convergence. Although this gate’s actions are less important than
the others and is often treated as a finesse-providing concept, it is good practice to
include this gate into the structure of the LSTM unit.
4. Output Gate(o): It determines what output (next Hidden State) to generate from
the current Internal Cell State.
Figure 1.5 LSTM CELL

14
Working of an LSTM recurrent unit:
1. Take input the current input, the previous hidden state and the previous internal cell
state.
2. Calculate the values of the four different gates by following the below steps: -
3. For each gate, calculate the parameterized vectors for the current input and the
previous hidden state by element-wise multiplication with the concerned vector
with the respective weights for each gate.
4. Apply the respective activation function for each gate elementwise on the
parameterized vectors. Below given is the list of the gates with the activation
function to be applied for the gate.
a. Input Gate: Sigmoid Function
b. Forget Gate: Sigmoid Function
c. Output Gate: Sigmoid Function
d. Input Modulation Gate: Hyperbolic Tangent Function
5. Calculate the current internal cell state by first calculating the element-wise
multiplication vector of the input gate and the input modulation gate, then calculate
the element-wise multiplication vector of the forget gate and the previous internal
cell state and then adding the two vectors.
ct = i ⊙ g + f ⊙ ct-1 (5)
6. Calculate the current hidden state by first taking the element-wise hyperbolic
tangent of the current internal cell state vector and then performing element wise
multiplication with the output gate.
ht = o ⊙ tanh(ct) (6)
1.1.5.2 GATED RECURRENT UNIT(GRU):
To solve the Vanishing-Exploding gradients problem often encountered during the
operation of a basic Recurrent Neural Network, many variations were developed. One of
the most famous variations is the Long Short-Term Memory Network (LSTM). One of the
lesser known but equally effective variations is the Gated Recurrent Unit Network (GRU).

15
Unlike LSTM, it consists of only three gates and does not maintain an Internal Cell State.
The information which is stored in the Internal Cell State in an LSTM recurrent unit is
incorporated into the hidden state of the Gated Recurrent Unit. This collective information
is passed onto the next Gated Recurrent Unit.
The different gates of a GRU are as described below: -
1. Update Gate(z): It determines how much of the past knowledge needs to be passed
along into the future. It is analogous to the Output Gate in an LSTM recurrent unit.
2. Reset Gate(r): It determines how much of the past knowledge to forget. It is
analogous to the combination of the Input Gate and the Forget Gate in an LSTM
recurrent unit.
3. Current Memory Gate(𝒉t): It is often overlooked during a typical discussion on
Gated Recurrent Unit Network. It is incorporated into the Reset Gate just like the
Input Modulation Gate is a sub-part of the Input Gate and is used to introduce some
non-linearity into the input and to also make the input Zero-mean. Another reason
to make it a sub-part of the Reset gate is to reduce the effect that previous
information has on the current information that is being passed into the future.
Figure 1.6 GRU CELL
Where,
xₜ = input at time step t.
hₜ = hidden layer input at time step t.
zₜ = update gate output at time step t.
rₜ = reset gate output at time step t.

16
1.1.6 RANDOM FOREST CLASSIFIER
Random forests are one the most popular machine learning algorithms. They are so
successful because they provide in general a good predictive performance, low overfitting,
and easy interpretability. This interpretability is given by the fact that it is straightforward
to derive the importance of each variable on the tree decision. In other words, it is easy to
compute how much each variable is contributing to the decision. Feature selection using
Random forest comes under the category of Embedded methods. Embedded methods
combine the qualities of filter and wrapper methods. They are implemented by algorithms
that have their own built-in feature selection methods. Random forest has low classification
error compared to other traditional classification algorithms.
Some of the benefits of RF are:
1. Ability to handle numerous input variables without a necessity for variable deletion.
2. Can run on huge data bases efficiently.
3. Provides estimates of important variables for the classification.
4. Random forest overcomes the problem over fitting.
5. Robust to noise and outliers when compared to single classifiers.
6. Lightweight when compared to other boosting methods.
We have made use of the ability of the random classifier method to rank the importance
of the features set to the target variables. We have selected those variables based on the
maximum importance levels. Those features with low values of the importance will add
less information to the learning model and are ignored based on the threshold values of the
importance.

17
1.2 MOTIVATION FOR THE WORK
With the increasingly deep integration of the internet and society, the internet is
changing the way in which people live, study and work, but the various security threats
that we face are becoming more and more serious. So, there is a need for Intrusion
Detection System. To identify these various network attacks, especially unforeseen attacks
is an unavoidable key technical issue. So, we thought of developing an intrusion-detection
system which could be a significant research achievement in the information security field,
can identify an invasion, which could be an ongoing invasion or an intrusion that had
already occurred.
In this project we have chosen the Gated Recurrent Unit (GRU) for implementation.
The basic workflow of a Gated Recurrent Unit Network is like that of a basic RNN which
is illustrated earlier, the main difference between the two is their internal working.
Recurrent Neural Networks suffer from short-term memory. So, LSTM’s and GRU’s were
created as the solution to short-term memory. They have internal mechanisms called gates
that can regulate the flow of information. The gates can learn which data in a sequence is
important to keep or throw away. By doing that, it can pass relevant information down the
long chain of sequences to make predictions. We have decided to work with GRU because
LSTM’s control the exposure of memory content (cell state) while GRU’s expose the entire
cell state to other units in the network. The LSTM unit has separate input and forget gates,
while the GRU performs both operations together via its reset gate. GRU use less training
parameters and use less memory, execute faster and train faster than LSTM.
1.3 PROBLEM STATEMENT
Most of the organizations suffer from attacks which are both from outside and
inside the network. The attacks from outside the network can be handled using firewalls.
But the attacks from inside the network cannot be detected easily. So, there is a need for
Intrusion Detection System which should be accurate enough to detect the unforeseen
attacks in a network. This project proposes a methodology that uses a deep learning
approach using gated recurrent neural networks which is better than traditional machine
learning classification methods to classify a record as an attack or a normal record.

18
1.4 ORGANIZATION OF THE THESIS
Chapter 1 discusses about the introduction to the project and it tells about the tools that is
used for developing the project.
Remaining chapters of the report describes as follows:
Chapter 2 specifies literature survey which includes different existing methods for
constructing the Intrusion Detection System.
Chapter 3 describes about the methodology which includes the system architecture, pre-
processing steps and implementation of our proposed system.
Chapter 4 describes about the software and hardware requirements for the execution of
our proposed system (GRU-IDS), sample code of our project and the experimental results
of our work along with the output screen shots.
Chapter 5 specifies the conclusion and future work.

19
2. LITERATURE SURVEY
2.1. A Detailed Analysis on NSL-KDD Dataset Using Various Machine
Learning Techniques for Intrusion Detection by S. Revathi, A. Malathi.
In [1], they had conducted a detailed study on KDD cup 99 as well as NSL-KDD
dataset which is an updated version of KDD cup 99 so that they can provide a good analysis
on various machine learning techniques for intrusion detection they had classified the
attacks into 4 major attacks i.e, Denial of Service (DoS),Probe, Remote to Local (R2L),
User to Root (U2R), which are present in the dataset, both in testing and training datasets.
They also conducted test accuracy using data mining techniques i.e, Random forest, J48,
SVM, CART and Naive Bayes. And the result has shown that Random Forest has high test
accuracy compared to all other algorithms. So, we are taking this into consideration and
applying this random forest classifier for feature selection.
2.2. Performance Analysis of NSL-KDD dataset using ANN by
Bhupendra Ingre, Anamika Yadav.
In [2], they had conducted performance analysis of NSL-KDD dataset using ANN
which included description of dataset’s i.e,
1. DARPA datasets (1998, 1999 and 2000).
2. The KDD 99 intrusion data is derived from DARPA 98 dataset. Dataset contain 41
features and one more attribute for class.
3. NSL-KDD dataset is offline network data based on KDD 99 dataset. It is an updated
version of KDD 99 dataset which removed all the redundant records.
The methodology which they had proposed applied on NSL-KDD dataset which
having 41 attribute and one class attribute. The training set of NSL-KDD does not include
redundant record and hence reduce the complexity level. There are various advantages of
NSL-KDD data set over the original KDD dataset which were discussed. The training is
performed on KDD Train data which contain 22 attack types and testing is performed on
KDD Test data which contains additional 17 attack type. These attacks can be categories
in four different types with some common properties. The four categories of attacks are:
Denial of Service (DoS), Probe, Remote to Local (R2L), User to Root (U2R). They

20
performed this experiment on MATLAB. Neural network with different hidden layer and
algorithm is used for training 18718 selected patterns and testing 22544 patterns of NSL-
KDD dataset. Training and testing performed on 41 and 29 selected features NSL dataset
with various values of neural network architecture. The training and testing with 41
attributes require more time as compare to 29 selected attributes. The result obtained for
both binary class as well as five class classification (type of attack). Results are analyzed
based on various performance measures and better accuracy was found. The detection rate
obtained is 81.2% and 79.9% for intrusion detection and attack type classification task
respectively for NSLKDD dataset. The performance of the proposed scheme has been
compared with existing scheme and higher detection rate is achieved in both binary class
as well as five class classification problems.
2.3. An Ensemble Model for Classification of Attacks with Feature
Selection based on KDD99 and NSL-KDD Dataset by AK Shrivas, AK
Dewangan.
In [3], they have ensembled two techniques as Artificial Neural Network (ANN)
and Bayesian Net. This ensemble model gives higher accuracy compared two each
individual model like ANN and Bayesian Net. Feature selection is also one of the most
important roles to reduce the irrelevant features and improve classification accuracy. Gain
Ratio (GR) feature selection applied on ensemble of ANN and Bayesian Net techniques
which gives higher accuracy with a smaller number of features. They also have conducted
experiment on Different attacks and normal category along with sample size of both
KDDCUP99 and NSL-KDD data sets.
Simulated results have shown that accuracy for proposed ensemble of ANN and
Bayesian Net is the best as compare to its individuals and other ensemble models. Accuracy
of proposed model is consistent (99.41%) in case of KDD99 data set with all partitions of
data set like 70-30%, 80-20% and 90-10% as training-testing, but accuracy of proposed
model is highest 97.76% in case of NSL-KDD data set with 80-20% training-testing
partitions.

21
2.4. Feature Selection for Intrusion Detection using NSL-KDD by Hee-su
Chae, Byung-oh Jo, Sang-Hyun Choi, Twae-kyung Park.
In [4], they had discussed a detailed description about NSL-KDD dataset and the
types of attacks. They had proposed a new feature selection method using feature average
of total and each class. And they applied one of the efficient classifier decision tree
algorithms for evaluating feature reduction methods and compared proposed methods and
other method. They had calculated the accuracy for the accumulation of the number of
features using the AR ranker and the accuracy of AR, CFS, IG, and GR for the
accumulation of the number of features and Full data. The result had shown the inverse
correlation between accuracy and AR up to 22 features. It was clear that the highest
accuracy is 99.794% at 22 features. The accuracy of full data is 99.763%. The highest CFS
accuracy was 99.781% with 25 features, IG was 99.781% with 23 features, and GR was
99.794% with 19 features.
2.5. A Deep Long Short-term memory-based classifier for wireless
Intrusion Detection System by M Kasongo, Y Sun.
In [5], They had proposed a Deep Long Short-Term Memory (DLSTM) based classifier
for wireless intrusion detection system (IDS). The DLSTM-IDS was trained and tested
using NSL-KDD dataset. Using the NSL-KDD dataset, the model DLSTM-IDS is
compared to the existing methods such as Deep Feed Forward Neural Networks, Support
Vector Machines, k-Nearest Neighbours, Random Forests and Naive Bayes. A feature
selection algorithm based on information gain was used to reduce the feature vector. The
accuracy on training data was 99.51% and the accuracy on test data was 86.99%.
2.6. A Deep Learning method with filter-based feature engineering for
Wireless Intrusion Detection System by M Kasongo, Yanxia Sun.
In [6], a DL method using feed forward deep neural networks (FFDNN) in
conjunction with a filter-based feature selection algorithm using information gain (IG) was
presented. In this research, various experiments were conducted using FFDNN with IG on
the NSL-KDD intrusion detection dataset. The FFDNN-IG was compared the following
22
models: SVM, KNN, NB, Random Forest (RF) and Decision Trees (DT). The results
suggested that for both the binary and the multiclass classification setups, FFDNN-IG
outperformed other models. Moreover, the results demonstrated that depth and the number
of neurons in the network influence the model’s accuracy. The FFDNN-IG gives an
accuracy of 99.37% on the training data and 86.76% on the test data.
2.7. A Study on NSL-KDD Dataset for Intrusion Detection System Based
on Classification Algorithms by L. Dhanabal and Dr. S.P. Shantharajah.
In [7], the analysis of the NSL-KDD data set is made by using various clustering
algorithms available in the WEKA data mining tool. The NSL-KDD data set is analyzed
and categorized into four different clusters depicting the four common different types of
attacks. An in-depth analytical study is made on the test and training data set. Execution
speed of the various clustering algorithms is analyzed. Here the 20% train and test data set
are used. This paper uses the NSL-KDD data set to reveal the most vulnerable protocol that
is frequently used intruders to launch network-based intrusions. Many types of analysis
have been carried out by many researchers on the NSL-KDD dataset employing different
techniques and tools with a universal objective to develop an effective intrusion detection
system. K-means clustering algorithm uses the NSL-KDD data set to train and test various
existing and new attacks. A comparative study on the NSL-KDD data set with its
predecessor KDD99 cup data set is made in by employing the Self Organization Map
(SOM) Artificial Neural Network. An exhaustive analysis on various data sets like KDD99
and NSLKDD are made in using various data mining-based machine learning algorithms
like Support Vector Machine (SVM), Decision Tree, K-nearest neighbor, K-Means and
Fuzzy C-Mean clustering algorithms.
2.8. Random Forest Modeling for Network Intrusion Detection System
by N. Farnaaz and M. A. Jabbar.
In [8], they have built a model for intrusion detection system using random forest
classifier. Random Forest (RF) is an ensemble classifier and performs well compared to
other traditional classifiers for effective classification of attacks.

23
They adopted the following preprocessing techniques to run the experiment.
1. Replace missing values: In Weka, they used to replace missing values filter to
replace all missing feature values in NSL-KDD dataset. This filter replaces all
missing values with the mean and mode from the training data.
2. Discretization: Numeric attributes were discretized by discretization filter using
unsupervised 10 bin discretization.
2.9. Intrusion Detection System using Data Mining Technique: Support
Vector Machine by B. Bhavsar and C. Waghmare.
In [9], they have built a model for Intrusion Detection System using Support Vector
Machine which is one of the most prominent classification algorithms in the data mining
area, but its drawback is its extensive training time. The experimental results showed that
they reduced extensive time required to build SVM model by performing proper data set
pre-processing. They have done a proper selection of SVM kernel function such as
Gaussian Radial Basis Function, attack detection rate of SVM is increased and False
Positive Rate (FPR) is decrease
2.10. An Artificial Neural Network based Intrusion Detection System and
Classification of Attacks by K.S Devi Krishna and B. Ramakrishna.
In [10], the proposed system presents a new approach of intrusion detection system
based on artificial neural network. Multi-Layer Perceptron (MLP) architecture is used for
Intrusion Detection System. The performance and evaluations are performed by using the
set of benchmark data from a KDD (Knowledge discovery in Database) dataset. The
proposed system in this is a Neural Network Intrusion Detection System. It utilizes ANN
(Artificial Neural Network) as a pattern recognition technique. Artificial Neural Network
is an information processing model that is inspired by the biological nervous systems, such
as brain, process information. The most important advantage of Neural Networks in misuse
detection is the ability of the Neural Network to "learn" the characteristics of misuse attacks
and identify instances that are unlike any which have been observed before by the network.
A neural network might be trained to recognize known suspicious events with a high degree
of accuracy. While this would be a very valuable ability, since attackers often emulate the

24
"successes" of others, the network would also gain the ability to apply this knowledge to
identify instances of attacks which did not match the exact characteristics of previous
intrusions.
2.11. An effective intrusion detection system classifier using long short-
term memory with gradient descent optimization by J. Kim and H. Kim.
In [11], an IDS using LSTM RNNs with Gradient Descent Optimization was developed.
The performance metrics used to evaluate the classifier were the precision, the detection
rate, the accuracy, and the false alarm rate (FAR). The LSTM based IDS was then
compared to other IDSs using the following classifier: RNN with Hessian-Free, LSTM
RNN using the stochastic gradient descent (SDG) and Feed Forward Neural Networks. The
results demonstrated that LSTM RNNs using the Nadam gradient descent optimizer
outperformed other IDS models by yielding a detection rate of 98.95% on training data, a
precision of 97.69%, a FAR of 9.98% and an accuracy of 97.54%.
2.12. Existing System
In [12], they had modelled an intrusion detection system based on deep learning
and proposed a deep learning approach for intrusion detection using recurrent neural
networks (RNN-IDS). The RNN-IDS consists of a single input layer, a hidden layer, and a
single output layer. This IDS is trained and tested using the standard NSL-KDD dataset.
The model was then compared with the traditional machine learning classifiers like
Random Forest, Multi-Layer Perceptron, Support Vector Machines, Naive Bayes, and
other machine learning methods proposed by previous researchers on the benchmark data
set. Moreover, they had studied the performance of the model in binary classification and
multiclass classification, and the number of neurons and different learning rate impacts on
the performance of the proposed model. The experimental results show that RNN-IDS is
very suitable for modeling a classification model with high accuracy and that its
performance is superior to that of traditional machine learning classification methods in
both binary and multiclass classification. The RNN-IDS model improves the accuracy of
the intrusion detection and provides a new research method for intrusion detection. The
metrics used for evaluating the RNN-IDS was the detection rate and accuracy. This IDS
gives an accuracy of 99.8% on training data and 83.28% on test data.

25
3. METHODOLOGY
3.1. PROPOSED SYSTEM
We have developed an Intrusion Detection System using a Recurrent Neural
Network with the gated recurrent units. The recurrent neural network comprises the input
unit, hidden unit, and output units. The hidden unit consists of all mathematical
computations. We are taking nsl-kdd dataset as input and it consists of the training and the
testing datasets. First the input data must be pre-processed to remove any irrelevant data
and then we applied the Random Forest Classifier for the Feature Selection on the target
data to reduce the dimensionality of the input data. Then, we fed this input data to the
Recurrent Neural Networks with GRU units to train the GRU-IDS and finally test the
proposed model with the nsl-kdd test dataset.
3.1.1. SYSTEM ARCHITECTURE
Figure 3.1 Proposed System
3.1.2. DATASET DESCRIPTION
The statistical analysis showed that there are important issues in the data set which
highly affects the performance of the systems, and results in a very poor estimation of
anomaly detection approaches. To solve these issues, a new data set as, NSL-KDD is
proposed, which consists of selected records of the complete KDD data set.

26
The advantage of NSL KDD dataset are
1. No redundant records in the train set, so the classifier will not produce any biased
result.
2. No duplicate record in the test set which have better reduction rates.
3. The number of selected records from each difficult level group is inversely
proportional to the percentage of records in the original KDD data set.
The proposed methodology applied on NSL-KDD dataset which is having 41 attribute and
one class attribute. The training is performed on KDDTrain data which contain 22 attack
types and testing is performed on KDDTest data which contains additional 17 attack type.
The attack classes present in the NSL-KDD data set are grouped into four categories:
• Denial of Service (DoS) – A malicious attempt to block system or network
resources and services.
• Probe – This attack collects the information about potential vulnerabilities of the
target system that can later be used to launch attacks on those systems.
• Remote to Local (R2L) – Unauthorized ability to dump data packets to remote
system over network and gain access either as a user or root to do their unauthorized
activity.
• User to Root (U2R) – In this, attackers access the system as a normal user and break
the vulnerabilities to gain administrative privileges.
Table 3.1 Features of NSL-KDD Dataset
Attribute
No.
Attribute Name
Description
Sample
Data
1
Duration
Length of time duration of the connection.
0
2
Protocol_type
Protocol used in the connection.
Tcp
3
Service
Destination network service used.
ftp_data
4
Flag
Status of the connection – Normal or Error.
SF

27
5
Src_bytes
Number of data bytes transferred from source to
destination in single connection.
491
6
Dst_bytes
Number of data bytes transferred from destination
to source in single connection.
0
7
Land
If source and destination IP addresses and port
numbers are equal then, this variable takes value 1
else 0.
0
8
Wrong_fragm ent
Total number of wrong fragments in this
connection.
0
9
Urgent
Number of urgent packets in this connection.
Urgent packets are packets with the urgent bit
activated.
0
10
Hot
Number of hot ‟indicators” in the content such as:
entering a system directory, creating programs, and
executing programs.
0
11
Num_failed_logins
Count of failed login attempts.
0
12
Logged_in
Login Status :1 is successfully logged in; 0
otherwise.
0
13
Num_comp romised
Number of compromised conditions.
0
14
Root_shell
1 if root shell is obtained; 0 otherwise.
0

28
15
Su_attempt ed
1 if “su root” command attempted or used; 0
otherwise.
0
16
Num_root
Number of root accesses or number of operations
performed as a root in the connection.
0
17
Num_file_c reations
Number of file creation operations in the
connection.
0
18
Num_shells
Number of shell prompts.
0
19
Num_access_files
Number of operations on access control files.
0
20
Num_outbound_cmds
Number of outbound commands in an ftp session.
0
21
Is_hot_login
1 if the login belongs to the “hot” list i.e., root or
admin; else 0.
0
22
Is_guest_login
1 if the login is a “guest” login; 0 otherwise.
0
23
Count
Number of connections to the same destination
host as the current connection in the past two.
2
24
Srv_count
Number of connections to the same service (port
number) as the current connection in the past two
seconds.
2

29
25
Serror_rate
The percentage of connections that have activated
the flag (4) s0, s1, s2 or s3, among the connections
aggregated in count (23).
0
26
Srv_serror_rate
The percentage of connections that have activated
the flag (4) s0, s1, s2 or s3, among the connections
aggregated in srv_count (24).
0
27
Rerror_rate
The percentage of connections that have activated
the flag (4) REJ, among the connections
aggregated in count (23).
0
28
Srv_rerror_rate
The percentage of connections that have activated
the flag (4) REJ, among the connections
aggregated in srv_count (24).
0
29
Same_srv_rate
The percentage of connections that were to the
same service, among the connections aggregated
in count (23).
1
30
Diff_srv_rate
The percentage of connections that were to
different services, among the connections
aggregated in count (23).
0
31
Srv_diff_host_ rat
The percentage of connections that were to
different destination machines among the
connections aggregated in srv_count (24).
0

30
32
Dst_host_coun t
Number of connections having the same
destination host IP address.
150
33
Dst_host_srv_ count
Number of connections having the same port
Number.
25
34
Dst host_same srv_rate
The percentage of connections that were to the
same service, among the connections aggregated
in dst_host_count (32).
0.17
35
Dst_host_diff_ srv_rate
The percentage of connections that were to
different services, among the connections
aggregated in dst_host_count (32).
0.03
36
Dst_host_same
_src_port_rate
The percentage of connections that were to the
same source port, among the connections
aggregated in dst_host_srv_count (33).
0.17
37
Dst_host_srv_diff_host_
rate
The percentage of connections that were to
different destination machines, among the
connections aggregated in dst_host_srv_count
(33).
0
38
Dst_host_serro r_rate
The percentage of connections that have activated
the flag (4) s0, s1, s2 or s3, among the connections
aggregated in dst_host_count (32).
0
39
Dst_host_srv_s
error_rate
The percent of connections that have activated the
flag (4) s0, s1, s2 or s3, among the connections
aggregated in dst_host_srv_count (33).
0

31
3.1.3 FLOW OF THE SYSTEM
Figure 3.2 Flow of the System
3.1.4. DATA PREPROCESSING
3.1.4.1. Conversion of Non-Numeric values to Numeric values
The GRU-IDS can accept only numeric values as input. The NSL-KDD dataset
consists of 41 features out of which 3 are non-numeric features. The non-numeric features
are labelled as ‘protocol_type’, ‘service’ and ‘flag’. These 3 non-numeric features need to
be converted into numeric form. This can be done by creating the binary vectors for the 3
non numeric features i.e, if the feature ‘protocol_type’ has three types of values like ‘tcp’,
40
Dst_host_rerro r_rate
The percentage of connections that have activated
the flag (4) REJ, among the connections
aggregated in dst_host_count (32).
0.05
41
Dst_host_srv_r
error_rate
The percentage of connections that have activated
the flag (4) REJ, among the connections
aggregated in dst_host_srv_count (33).
0

32
‘udp’ and ‘icmp’ then its binary vectors look like (1,0,0), (0,1,0) and (0,0,1). In this way
we performed the same technique for the remaining two features (‘service’ and ‘flag’). By
the end of this process the 41 features are transformed into 122 features.
3.1.4.2. Normalization
The GRU-IDS works with the input which is only in the range of 0 to 1. As the
input data we get is not in the specific range [0-1]. So here we applied a Min-max scaling
technique to scale the input data in the range between 0 to 1. The below equation was
applied to each input feature in the nsl-kdd dataset.
I′ = I − minj
maxj − minj (7)
In the equation (7), I is the unnormalized value of a attribute, I’ is the changed value
of the attribute which is in the normalized form and maxⱼ and minⱼ are the maximum and
minimum values of the jth attribute.
3.1.5. Feature Selection
The NSL-KDD dataset has 41 attributes and one class attribute. From those 41
attributes, some of the attributes will not be useful in the detection of intrusion. So, we are
using the random forest classifier to remove some of the unimportant attributes of the train
and test datasets that resolves the problem of overfitting and decrease the training time of
the GRU-IDS model.
Random forest is a supervised learning algorithm which is used for both
classification as well as regression. But however, it is mainly used for classification
problems. As we know that a forest is made up of trees and more trees means more robust
forest. Similarly, random forest algorithm creates decision trees on data samples and then
gets the prediction from each of them and finally selects the best solution by means of
voting. The random forest is a model made up of many decision trees. Rather than just
simply averaging the prediction of trees (which we could call a “forest”), this model
uses two key concepts that gives it the name random.

33
Random sampling of training observations:
When training, each tree in a random forest learns from a random sample of the data
points. The samples are drawn with replacement, known as bootstrapping, which means that
some samples will be used multiple times in a single tree. The idea is that by training each
tree on different samples, although each tree might have high variance with respect to a set
of the training data, overall, the entire forest will have lower variance but not at the cost of
increasing the bias. At test time, predictions are made by averaging the predictions of each
decision tree. This procedure of training each individual learner on different bootstrapped
subsets of the data and then averaging the predictions is known as bagging, short for
bootstrap aggregating.
Random Subsets of features for splitting nodes:
The other main concept in the random forest is that only a subset of all the features
are considered for splitting each node in each decision tree. Generally, this is set to
sqrt(n_features) for classification meaning that if there are 16 features, at each node in each
tree, only 4 random features will be considered for splitting the node.
Working of Random Forest Algorithm
We can understand the working of Random Forest algorithm with the help of
following steps –
Step 1 − First, start with the selection of random samples from a given dataset.
Step 2 − Next, this algorithm will construct a decision tree for every sample. Then it will
get the prediction result from every decision tree.
Step 3 − In this step, voting will be performed for every predicted result.
Step 4 − At last, select the most voted prediction result as the final prediction result.
The following diagram will illustrate its working –

34
Figure 3.3 Working of Random Forest Classifier
3.1.6. WORKING OF GATED RECURRENT NEURAL NETWORKS
GRUs are improved version of standard recurrent neural network. To solve the
vanishing gradient problem of a standard RNN, GRU uses, so-called, update gate and reset
gate. Basically, these are two vectors which decide what information should be passed to
the output. The special thing about them is that they can be trained to keep information from
long ago, without washing it through time or remove information which is irrelevant to the
prediction. To explain the mathematics behind that process we will examine a single unit
from the following recurrent neural network:
Figure 3.4 Recurrent Neural Network with Gated Recurrent Unit

35
Here is a more detailed version of that single GRU:
Figure 3.5 Gated Recurrent Unit
Update Gate:
We start with calculating the update gate z_t for time step t using the formula:
zt = σ(W(z) xt + U(z) ht-1) (8)
When x_t is plugged into the network unit, it is multiplied by its own weight
W(z). The same goes for h_(t-1) which holds the information for the previous t-1 units
and is multiplied by its own weight U(z). Both results are added together, and a sigmoid
activation function is applied to squash the result between 0 and 1. Following the above
schema, we have:

36
Figure 3.6 Update Gate
The update gate helps the model to determine how much of the past information (from
previous time steps) needs to be passed along to the future. That is powerful because the
model can decide to copy all the information from the past and eliminate the risk of
vanishing gradient problem.
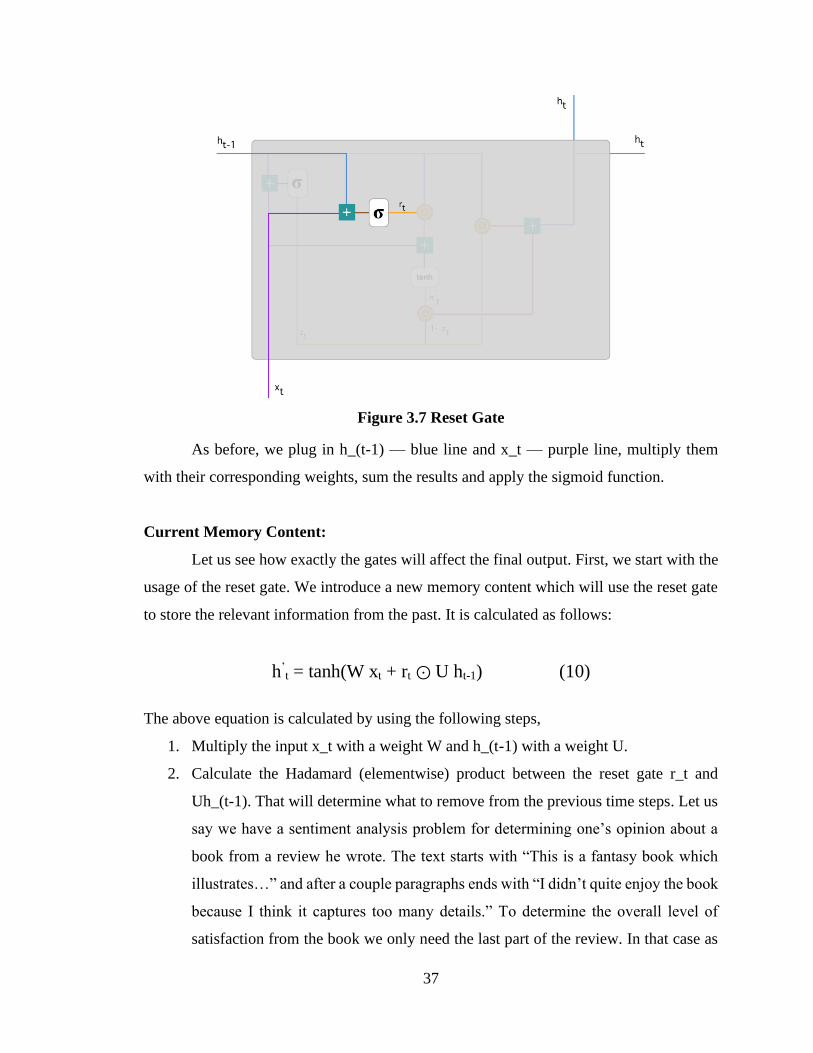
Reset Gate:
Essentially, this gate is used from the model to decide how much of the past
information to forget. To calculate it, we use:
rt = σ(W(r) xt + U(z) ht-1) (9)
This formula is the same as the one for the update gate. The difference comes in
the weights and the gate’s usage, which will see in a bit. The schema below shows where
the reset gate is:
37
Figure 3.7 Reset Gate
As before, we plug in h_(t-1) — blue line and x_t — purple line, multiply them
with their corresponding weights, sum the results and apply the sigmoid function.
Current Memory Content:
Let us see how exactly the gates will affect the final output. First, we start with the
usage of the reset gate. We introduce a new memory content which will use the reset gate
to store the relevant information from the past. It is calculated as follows:
h’t = tanh(W xt + rt ⊙ U ht-1) (10)
The above equation is calculated by using the following steps,
1. Multiply the input x_t with a weight W and h_(t-1) with a weight U.
2. Calculate the Hadamard (elementwise) product between the reset gate r_t and
Uh_(t-1). That will determine what to remove from the previous time steps. Let us
say we have a sentiment analysis problem for determining one’s opinion about a
book from a review he wrote. The text starts with “This is a fantasy book which
illustrates…” and after a couple paragraphs ends with “I didn’t quite enjoy the book
because I think it captures too many details.” To determine the overall level of
satisfaction from the book we only need the last part of the review. In that case as

38
the neural network approaches to the end of the text it will learn to assign r_t vector
close to 0, washing out the past and focusing only on the last sentences.
3. Sum up the results of step 1 and 2.
4. Apply the nonlinear activation function tanh.
You can clearly see the steps in the Figure 14.
Figure 3.8 Current Memory Gate
We do an element-wise multiplication of h_(t-1) — blue line and r_t — orange line
and then sum the result — pink line with the input x_t — purple line. Finally, tanh is used
to produce h’_t — bright green line.
Final Memory at Current Time Step
As the last step, the network needs to calculate, h_t — vector which holds
information for the current unit and passes it down to the network. In order to do that the
update gate is needed. It determines what to collect from the current memory content —
h’_t and what from the previous steps — h_(t-1).
That is done as follows:
ht = zt ⊙ ht-1 + (1-zt) ⊙ h’t (11)

39
1. Apply element-wise multiplication to the update gate z_t and h_(t-1).
2. Apply element-wise multiplication to (1-z_t) and h’_t.
3. Sum the results from step 1 and 2.
Let us bring up the example about the book review. This time, the most relevant
information is positioned in the beginning of the text. The model can learn to set the vector
z_t close to 1 and keep most of the previous information. Since z_t will be close to 1 at this
time step, 1-z_t will be close to 0 which will ignore big portion of the current content (in
this case the last part of the review which explains the book plot) which is irrelevant for
our prediction. Here is an illustration in Figure 3.9 which emphasizes on the above
equation:
Figure 3.9 Final Memory Gate
Following through, you can see how z_t — green line is used to calculate 1-z_t
which, combined with h’_t — bright green line, produces a result in the dark red line. z_t
is also used with h_(t-1) — blue line in an element-wise multiplication. Finally, h_t — blue
line is a result of the summation of the outputs corresponding to the bright and dark red
lines.
Now, you can see how GRUs are able to store and filter the information using their
update and reset gates. That eliminates the vanishing gradient problem since the model is
not washing out the new input every single time but keeps the relevant information and
passes it down to the next time steps of the network. If carefully trained, they can perform
extremely well even in complex scenarios.

40
Training through Recurrent Neural Network
1. A single time step of the input is provided to the network.
2. Then calculate its current state using set of current input and the previous state.
3. The current ht becomes ht-1 for the next time step.
4. One can go as many time steps according to the problem and join the information
from all the previous states.
5. Once all the time steps are completed the final current state is used to calculate the
output.
6. The output is then compared to the actual output i.e the target output and the error
is generated.
7. The error is then backpropagated to the network to update the weights and hence
the network (RNN) is trained.
3.2 ADAM OPTIMIZER:
Gradient Descent is an iterative optimization algorithm, used to find the minimum
value for a function. The general idea is to initialize the parameters to random values, and
then take small steps in the direction of the “slope” at each iteration. Gradient descent is
highly used in supervised learning to minimize the error function and find the optimal
values for the parameters.
Adam is different to classical stochastic gradient descent. Stochastic gradient
descent maintains a single learning rate (termed alpha) for all weight updates and the
learning rate does not change during training. A learning rate is maintained for each
network weight (parameter) and separately adapted as learning unfolds. The method
computes individual adaptive learning rates for different parameters from estimates of first
and second moments of the gradients.
The authors describe Adam as combining the advantages of two other extensions
of stochastic gradient descent. Specifically:
• Adaptive Gradient Algorithm (AdaGrad) that maintains a per-parameter learning
rate that improves performance on problems with sparse gradients (e.g. natural
language and computer vision problems).

41
• Root Mean Square Propagation (RMSProp) that also maintains per-parameter
learning rates that are adapted based on the average of recent magnitudes of the
gradients for the weight (e.g. how quickly it is changing). This means the algorithm
does well on online and non-stationary problems (e.g. noisy).
Adam realizes the benefits of both AdaGrad and RMSProp. Instead of adapting the
parameter learning rates based on the average first moment (the mean) as in RMSProp,
Adam also makes use of the average of the second moments of the gradients (the
uncentered variance).Specifically, the algorithm calculates an exponential moving average
of the gradient and the squared gradient, and the parameters beta1 and beta2 control the
decay rates of these moving averages. The initial value of the moving averages and beta1
and beta2 values close to 1.0 (recommended) result in a bias of moment estimates towards
zero. This bias is overcome by first calculating the biased estimates before then calculating
bias-corrected estimates.
3.3 HYPER PARAMETERS
The hyperparameters used in the design of the Gated recurrent neural network have
a great impact on the performance of the network. Although there are many hyper-
parameters involved in the design of a Gated recurrent neural network, the parameters
having the largest impact on the performance of the network are learning rate, number of
hidden layers, number of units/cells in the hidden layer and the number of time-steps.
Learning Rate:
It is a measure of the rate at which the network optimizes the minimization of the
loss function in a neural network. Mathematically, if the loss function is L (X; W, b), then
the goal of the network is to minimize the loss (cost) function L. The weights are constantly
updated to achieve the best possible output reducing the loss value. The learning rate
determines how fast the parameters are updated. One must vary the learning rate during the
training of the neural network to obtain the best results.
Time-Steps:
Selecting the number of time-steps also plays a crucial role in the performance of
the system. The information required to find the correct patterns depends on the number of
time-steps that are required to back propagate. Tuning the number of time-steps improves

42
the output of the network. When more time-steps are selected, the network takes longer to
time to train and vice-versa.
Hidden Units:
The number of cells in a hidden layer determines the amount of computation
performed on the input data. The more hidden units in the network, the longer it takes to
train. The neural network should be trained for a various number of hidden units to verify
the performance of the system.
Hidden Layers:
The stacking of GRU layers makes a multilayer GRU, which has a great impact on
higher dimensional datasets. However, most deep neural networks obtain optimized
performance with a single hidden layer. One must decide on the number of hidden layers
to be used with respect to their data-set size and the dimensions.
Batch size:
Batch size is a term used in machine learning and refers to the number of training
examples utilized in one iteration. The batch size can be one of three options:
1. Batch mode: where the batch size is equal to the total dataset thus making the
iteration and epoch values equivalent.
2. Mini-batch mode: where the batch size is greater than one but less than the total
dataset size. Usually, a number that can be divided into the total dataset size.
3. Stochastic mode: where the batch size is equal to one. Therefore, the gradient and
the neural network parameters are updated after each sample.
Epoch:
In Deep Learning, an epoch is a hyperparameter which is defined before training a
model. One epoch is when an entire dataset is passed both forward and backward through
the neural network only once. Since one epoch is too big to feed to the computer at once
we divide it in several smaller batches.
1 Epoch = 1 Forward pass + 1 Backward pass for ALL training samples.

43
Batch Size = Number of training samples in 1 Forward/1 Backward pass. With increase in
Batch size, required memory space increases. Iterations is the number of batches needed to
complete one epoch.
3.4. ACTIVATION FUNCTIONS
Neural network activation functions are a crucial component of deep learning.
Activation functions determine the output of a deep learning model, its accuracy, and the
computational efficiency of training a model—which can make or break a large-scale
neural network. Activation functions also have a major effect on the neural network’s
ability to converge and the convergence speed, or in some cases, activation functions might
prevent neural networks from converging in the first place. In a neural network, numeric
data points called inputs, are fed into the neurons in the input layer. Each neuron has a
weight and multiplying the input number with the weight gives the output of the neuron,
which is transferred to the next layer.
The activation function is a mathematical “gate” in between the input feeding the
current neuron and its output going to the next layer. It can be as simple as a step function
that turns the neuron output on and off, depending on a rule or threshold. Or it can be a
transformation that maps the input signals into output signals that are needed for the neural
network to function. Increasingly, neural networks use non-linear activation functions,
which can help the network learn complex data, compute, and learn almost any function
representing a question, and provide accurate predictions.
3 Types of Activation Functions
1. Binary Step Function
A binary step function is a threshold-based activation function. If the input
value is above or below a certain threshold, the neuron is activated and sends the
same signal to the next layer. The problem with a step function is that it does not
allow multi-value outputs—for example, it cannot support classifying the inputs
into one of several categories.
f (x) = {0 𝑖𝑓 𝑥 >= 0
1 𝑖𝑓 < 0 (12)

44
2. Linear Activation Function
A linear activation function takes the form:
A = cx (13)
It takes the inputs, multiplied by the weights for each neuron, and creates an output
signal proportional to the input. In one sense, a linear function is better than a step
function because it allows multiple outputs, not just yes and no. However, a linear
activation function has two major problems:
i. Not possible to use backpropagation (gradient descent) to train the
model—the derivative of the function is a constant, and has no
relation to the input, X. So, it is not possible to go back and
understand which weights in the input neurons can provide a better
prediction.
ii. All layers of the neural network collapse into one—with linear
activation functions, no matter how many layers in the neural
network, the last layer will be a linear function of the first layer
(because a linear combination of linear functions is still a linear
function). So, a linear activation function turns the neural network
into just one layer.
A neural network with a linear activation function is simply a linear
regression model. It has limited power and ability to handle complexity varying
parameters of input data.
3. Non-Linear Activation Functions
Modern neural network models use non-linear activation functions. They
allow the model to create complex mappings between the network’s inputs and
outputs, which are essential for learning and modelling complex data, such as
images, video, audio, and data sets which are non-linear or have high
dimensionality. Almost any process imaginable can be represented as a functional
computation in a neural network, provided that the activation function is non-linear.

45
Non-linear functions address the problems of a linear activation function:
i. They allow backpropagation because they have a derivative function which
is related to the inputs.
ii. They allow “stacking” of multiple layers of neurons to create a deep neural
network. Multiple hidden layers of neurons are needed to learn complex
data sets with high levels of accuracy.
Some common Nonlinear Activation Functions are as follows:
1. Sigmoid / Logistic
f(x) = sigmoid(x) = 1
1+𝑒−𝑥 (14)
This activation function translates the input ranged in [-Inf; +Inf] to the range
(0,1).
Advantages
• Smooth gradient, preventing “jumps” in output values.
• Output values bound between 0 and 1, normalizing the output of each
neuron.
• Clear predictions—For X above 2 or below -2, tends to bring the Y value
(the prediction) to the edge of the curve, very close to 1 or 0. This enables
clear predictions.
Disadvantages
• Vanishing gradient—for very high or very low values of X, there is almost
no change to the prediction, causing a vanishing gradient problem. This can
result in the network refusing to learn further or being too slow to reach an
accurate prediction.
• Outputs not zero centred.
• Computationally expensive

46
2. Tanh / Hyperbolic Tangent
tanh(x) = 2
1+𝑒−2𝑥 − 1 (15)
This activation function translates the input ranged in [-Inf; +Inf] to the range
(-1, 1).
Advantages
• Zero centred making it easier to model inputs that have strongly negative,
neutral, and strongly positive values.
• Otherwise like the Sigmoid function.
Disadvantages
• Like the Sigmoid function
3. ReLU (Rectified Linear Unit)
RELU (x) = {0 𝑖𝑓 𝑥 < 0
𝑥 𝑖𝑓 𝑥 ≥ 0 (16)
Advantages
• Computationally efficient—allows the network to converge very quickly
• Non-linear—although it looks like a linear function, ReLU has a derivative
function and allows for backpropagation
Disadvantages
• The Dying ReLU problem—when inputs approach zero, or are negative, the
gradient of the function becomes zero, the network cannot perform
backpropagation and cannot learn.
4.Softmax
𝜎(𝑧)𝑗 = 𝑒
𝑧𝑗
∑ 𝑒𝑧𝑘𝐾𝑘=1
(17)
where j = 1, 2, ..., K.
Advantages
• Able to handle multiple classes only one class in other activation
functions—normalizes the outputs for each class between 0 and 1, and

47
divides by their sum, giving the probability of the input value being in a
specific class.
• Useful for output neurons—typically Softmax is used only for the output
layer, for neural networks that need to classify inputs into multiple
categories.
3.5. EVALUATION MEASURES
In our model, the most important performance indicator (Accuracy, AC) of
intrusion detection is used to measure the performance of the RNN-IDS model. In addition
to the accuracy, we introduce the detection rate and false positive rate.
True Positive (TP): It is equivalent to those records that are correctly rejected, and it
denotes the number of anomaly records that are identified as anomaly.
False Positive (FP): It is the equivalent of incorrectly rejected, and it denotes the number
of normal records that are identified as anomaly.
True Negative (TN): It is equivalent to those correctly admitted, and it denotes the number
of normal records that are identified as normal.
False Negative (FN): It is equivalent to those incorrectly admitted, and it denotes the
number of anomaly records that are identified as normal.
We have the following notation:
Accuracy (AC): The percentage of the number of records classified correctly versus total
the records shown in (18).
AC =TP + TN
TP + TN + FP + FN (18)
True Positive Rate (TPR): As the equivalent of the Detection Rate (DR), it shows the
percentage of the number of records identified correctly over the total number of anomaly
records, as shown in (19).
TPR =TP
TP + FN (19)

48
False Positive Rate (FPR): The percentage of the number of records rejected incorrectly
is divided by the total number of normal records, as shown in (20).
FPR = FP
FP + TN (20)
Precision (PR): It is the fraction of data instances predicted as positive that are positive.
PR =TP
TP + FP (21)
F-Measure(F-score): It is also called F-score. It is used to evaluate the correctness of a
test. The F-Score is a measure that takes into consideration both the Precision and the
Recall in order to validate the accuracy. It is the harmonic mean of the Recall (DR) and the
Precision. Best results are achieved when F-measure equal to 1 and worst when F-measure
is 0 and it is expressed as follows:
F − score = 2 ∗(PR ∗ TPR)
(PR + TPR) (22)
The Confusion matrix visualizes the performance of the GRU-IDS model as shown
below.
Table 3.2 Confusion Matrix

49
4. EXPERIMENTAL ANALYSIS AND RESULTS
4.1 SYSTEM CONFIGURATION
4.1.1. Software Requirements
Programming Language: Python 3.7.
Libraries used: NumPy, Pandas, Matplotlib, TensorFlow.
GUI used: Anaconda Navigator.
Python:
Python is open source, interpreted, high level language and provides great approach
for object-oriented programming. It is one of the best languages used by data scientist for
various data science projects/application. Python provide great functionality to deal with
mathematics, statistics, and scientific function. It provides great libraries to deals with data
science application. One of the main reasons why Python is widely used in the scientific
and research communities is because of its ease of use and simple syntax which makes it
easy to adapt for people who do not have an engineering background. It is also more suited
for quick prototyping.
According to engineers coming from academia and industry, deep learning
frameworks available with Python APIs, in addition to the scientific packages have made
Python incredibly productive and versatile. There has been a lot of evolution in deep
learning Python frameworks and it is rapidly upgrading.
NumPy:
NumPy is Python library that provides mathematical function to handle large
dimension array. It provides various method/function for Array, Metrics, and linear
algebra. NumPy stands for Numerical Python. It provides lots of useful features for
operations on n-arrays and matrices in Python. The library provides vectorization of
mathematical operations on the NumPy array type, which enhance performance and speeds
up the execution. It’s very easy to work with large multidimensional arrays and matrices
using NumPy.

50
Pandas:
Pandas is one of the most popular Python libraries for data manipulation and
analysis. Pandas provide useful functions to manipulate large amount of structured data.
Pandas provide easiest method to perform analysis. It provides large data structures and
manipulating numerical tables and time series data. Pandas is a perfect tool for data
wrangling.
Pandas is designed for quick and easy data manipulation, aggregation, and
visualization. There two data structures in Pandas –
Series – It Handle and store data in one-dimensional data.
Data Frame – It Handle and store Two-dimensional data.
Matplotlib:
Matplotlib is another useful Python library for Data Visualization. Descriptive
analysis and visualizing data are very important for any organization. Matplotlib provides
various method to Visualize data in more effective way. Matplotlib allows to quickly make
line graphs, pie charts, histograms, and other professional grade figures. Using Matplotlib,
one can customize every aspect of a figure. Matplotlib has interactive features like zooming
and planning and saving the Graph in graphics format.
Anaconda:
Anaconda is a free and open-source distribution of the Python and R programming
languages for scientific computing that aims to simplify package management and
deployment. Package versions are managed by the package management system conda.
The Anaconda distribution includes data-science packages suitable for Windows, Linux,
and MacOS. Anaconda distribution comes with 1,500 packages selected from PyPI as well
as the conda package and virtual environment manager. It also includes a GUI, Anaconda
Navigator as a graphical alternative to the command line interface (CLI).

51
Anaconda Navigator:
Anaconda Navigator is a desktop graphical user interface (GUI) included in
Anaconda distribution that allows users to launch applications and manage conda
packages, environments and channels without using command-line commands. Navigator
can search for packages on Anaconda Cloud or in a local Anaconda Repository, install
them in an environment, run the packages and update them. It is available
for Windows, MacOS and Linux.
Jupyter Notebook:
The Jupyter Notebook is an open-source web application that allows you to create
and share documents that contain live code, equations, visualizations, and narrative text. A
Jupyter Notebook document is a JSON document, following a versioned schema, and
containing an ordered list of input/output cells which can contain code, text mathematics,
plots and rich media, usually ending with the “. ipynb" extension.
TensorFlow:
TensorFlow is an open-source software library for dataflow programming across a
range of tasks. It is a symbolic math library, and also used for machine learning applications
such as neural networks. Google open-sourced TensorFlow in November 2015. Since then,
TensorFlow has become the most starred machine learning repository on GitHub.
TensorFlow’s popularity is due to many things, but primarily because of the computational
graph concept, automatic differentiation, and the adaptability of the TensorFlow python
API structure. This makes solving real problems with TensorFlow accessible to most
programmers. Google’s TensorFlow engine has a unique way of solving problems. This
unique way allows for solving machine learning problems very efficiently.
TensorFlow, as the name indicates, is a framework to define and run computations
involving tensors. A tensor is a generalization of vectors and matrices to potentially higher
dimensions. Internally, TensorFlow represents tensors as n-dimensional arrays of base
datatypes. Each element in the Tensor has the same data type, and the data type is always
known. The shape (that is, the number of dimensions it has and the size of each dimension)

52
might be only partially known. Most operations produce tensors of fully known shapes if
the shapes of their inputs are also fully known, but in some cases, it is only possible to find
the shape of a tensor at graph execution time.
Some of the basic tensorflow methods are:
i. tf. name_scope()
A context manager for use when defining a Python op.
tf.name_scope (
name
)
This context manager pushes a name scope, which will make the name of all
operations added within it have a prefix.
For example, to define a new Python op called my_op:
def my_op (a, b, c, name=None):
with tf.name_scope("MyOp") as scope:
a = tf.convert_to_tensor(a, name="a")
b = tf.convert_to_tensor(b, name="b")
c = tf.convert_to_tensor(c, name="c")
# Define some computation that uses `a`, `b`, and `c`.
return foo_op(..., name=scope)
When executed, the Tensors a, b, c, will have names MyOp/a, MyOp/b, and
MyOp/c. If the scope name already exists, the name will be made unique by
appending _n. For example, calling my_op the second time will generate
MyOp_1/a, etc.
Args:
• name: The prefix to use on all names created within the name scope.
Attributes:
• name
Raises:
• ValueError: If name is None, or not a string.

53
ii. tf.Session():
A class for running TensorFlow operations.
tf.Session(
target='', graph=None, config=None
)
A Session object encapsulates the environment in which Operation objects
are executed, and Tensor objects are evaluated. For example:
# Build a graph.
a = tf.constant(5.0)
b = tf.constant(6.0)
c = a * b
# Launch the graph in a session.
sess = tf.Session()
# Evaluate the tensor ‘c’.
print(sess.run(c))
A session may own resources, such as tf.Variable, tf.queue.QueueBase, and
tf.ReaderBase. It is important to release these resources when they are no longer
required. To do this, either invoke the tf.Session.close method on the session or use
the session as a context manager. The following two examples are equivalent:
# Using the `close()` method.
sess = tf.Session()
sess.run(...)
sess.close()

54
Args:
• target: (Optional.) The execution engine to connect to. Defaults to using an
in-process engine. See Distributed TensorFlow for more examples.
• graph: (Optional.) The Graph to be launched (described above).
• config: (Optional.) A ConfigProto protocol buffer with configuration
options for the session.
Attributes:
• graph: The graph that was launched in this session.
• graph_def: A serializable version of the underlying TensorFlow
• graph.sess_str: The TensorFlow process to which this session will connect.
iii. tf. placeholder():
Inserts a placeholder for a tensor that will be always fed.
tf.compat.v1.placeholder(
dtype, shape=None, name=None
)
x = tf.placeholder(tf.float32, shape=(1024, 1024))
y = tf.matmul(x, x)
with tf.Session() as sess:
print(sess.run(y)) # ERROR: will fail because x was not fed.
rand_array = np.random.rand(1024, 1024)
print(sess.run(y, feed_dict={x: rand_array})) # Will succeed.
Args:
• dtype: The type of elements in the tensor to be fed.
• shape: The shape of the tensor to be fed (optional). If the shape is not
specified, you can feed a tensor of any shape.
• name: A name for the operation (optional).
Returns:
• A Tensor that may be used as a handle for feeding a value, but not evaluated
directly.
Raises:
• RuntimeError: if eager execution is enabled

55
iv. tf. variable_scope():
A context manager for defining ops that creates variables (layers).
tf.variable_scope(
name_or_scope, default_name=None, values=None, initializer=None,
regularizer=None,caching_device=None,partitioner=None,custom_getter=None,
reuse=None, dtype=None, use_resource=None, constraint=None,
auxiliary_name_scope=True
)
This context manager validates that the (optional) values are from the same
graph, ensures that graph is the default graph, and pushes a name scope and a
variable scope. If name_or_scope is not None, it is used as is. If name_or_scope is
None, then default_name is used. In that case, if the same name has been previously
used in the same scope, it will be made unique by appending _N to it.
Variable scope allows you to create new variables and to share already
created ones while providing checks to not create or share by accident.
Simple example of how to create a new variable:
with tf..variable_scope("foo"):
with tf.variable_scope("bar"):
v = tf.get_variable("v", [1])
assert v.name == "foo/bar/v:0"
4.1.2. Hardware Requirements
CPU: Intel ® Core ™ i5-5200U CPU @ 2.20 GHz or above.
RAM: minimum 8 GB is required.
Operating System:
• Windows 8 or newer, 32 or 64 bit.
• Ubuntu 14+, 64 bit.
• macOS 10.13+ ,64 bit.

56
4.2 SAMPLE CODE ELABORATION:
4.2.1. Importing the required packages
import pandas as pd
import numpy as np
import tensorflow as tf
tf.reset_default_graph()
import matplotlib.pyplot as plt
from tensorflow.contrib import rnn
4.2.2. Loading the nsl-kdd datasets
train_data = pd.read_csv('nsl-kdd/kdd_train+.csv')
test_data = pd.read_csv('nsl-kdd/kdd_test+.csv')
Xtrain_input = train_data.iloc[:,:-1]
Ytrain_output = train_data.iloc[:,-1]
Xtest_input = test_data.iloc[:,:-1]
Ytest_output = test_data.iloc[:,-1]
4.2.3. Conversion of Symbolic features to Numerical values
training = pd.get_dummies(data=Xtrain_input, columns=['protocol_type', 'service',
'flag'])
testing = pd.get_dummies(data=Xtest_input, columns=['protocol_type', 'service',
'flag'])
traincols = list(training.columns.values)
testcols = list(testing.columns.values)
for col in traincols:
if col not in testcols:
testing[col] = 0
testcols.append(col)
for col in testcols:
if col not in traincols:
training[col] = 0

57
traincols.append(col)
l=[]
for i in range(len(Ytrain_output)):
if Ytrain_output[i] == 'normal':
l.append(1)
else:
l.append(0)
x_train = training
print(x_train.shape)
data={'labels': l}
y_train = pd.DataFrame(data)
print(y_train.shape)
l=[]
for i in range(len(Ytest_output)):
if Ytest_output[i] == 'normal':
l.append(1)
else:
l.append(0)
x_test = testing
print(x_test.shape)
data = {'labels':l}
y_test = pd.DataFrame(data)
print(y_test.shape)
4.2.4. Normalization
cols_to_normalise = list(training.columns.values)[:38]
training[cols_to_normalise] = training[cols_to_normalise].apply(lambda x: (x -
x.min()) / (x.max() - x.min()))
testing[cols_to_normalise] = testing[cols_to_normalise].apply(lambda x: (x -
x.min()) / (x.max() - x.min()))

58
training.replace(np.nan, 0, inplace=True)
testing.replace(np.nan, 0, inplace=True)
traincols = list(training.columns.values)
testcols = list(testing.columns.values)
for col in traincols:
if col not in testcols:
testing[col] = 0
testcols.append(col)
for col in testcols:
if col not in traincols:
training[col] = 0
traincols.append(col)
4.2.5. Feature Selection using Random forest classifier
sel = SelectFromModel(RandomForestClassifier(n_estimators = 100))
sel.fit(x_train, y_train.values.ravel())
selected_feat = x_train.columns[(sel.get_support())]
importances = sel.estimator_.feature_importances_
indices = np.argsort(importances)[::-1]
plt.figure()
plt.title("Feature importances")
plt.bar(range(x_train.shape[1]),importances[indices],color="r",align="center")
plt.xticks(range(x_train.shape[1]), indices)
plt.xlim([-1, x_train.shape[1]])
plt.show()
colnames = x_train.columns[(sel.get_support())]
def select_columns(data_frame, column_names):
new_frame = data_frame.loc[:, column_names]
return new_frame
x_train_reduced = select_columns(x_train,colnames)
x_test_reduced = select_columns(x_test,colnames)

59
X_train = np.array(x_train_reduced)
X_test = np.array(x_test_reduced)
Y_train = np.array(y_train)
Y_test = np.array(y_test)
y_train.columns = ["y1"]
y_train.loc[:,('y2')] = y_train['y1'] ==0
y_train.loc[:,('y2')] = y_train['y2'].astype(int)
Y_train = np.array(y_train)
y_test.columns = ["y1"]
y_test.loc[:,('y2')] = y_test['y1'] ==0
y_test.loc[:,('y2')] = y_test['y2'].astype(int)
Y_test = np.array(y_test)
4.2.6. Building the GRU-IDS model:
# Hyper Parameters
learning_rate = 0.001
training_epochs =180
display_step =1
num_layers = 1
input_dim=X_train.shape[1]
#Input Placeholders
with tf.name_scope('input'):
x = tf.placeholder(tf.float32,shape = [None,input_dim], name = "x-input")
y = tf.placeholder(tf.float32, shape = [None,2],name = "y-input")
#Weights and Biases
with tf.name_scope("weights"):
W = tf.Variable(tf.random_normal([input_dim,2]))
with tf.name_scope("biases"):
b = tf.Variable(tf.random_normal([2]))

60
#Model
with tf.name_scope("splitx"):
newx = tf.split(x,1,0)
with tf.name_scope("MultiRNNcell"):
multicell=tf.contrib.rnn.MultiRNNCell([tf.contrib.rnn.GRUCell(input_di
m) for i in range (num_layers)], state_is_tuple=True)
with tf.variable_scope('gru_cell'):
outputs,states = tf.contrib.rnn.static_rnn(multicell,newx,dtype=tf.float32,
scope = None)
with tf.name_scope("output"):
output = tf.add(tf.matmul(outputs[-1],W),b)
with tf.name_scope("cross_entropy"):
cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(labels = y,
logits = output))
with tf.name_scope("train"):
optimizer = tf.train.AdamOptimizer(learning_rate).minimize(cost)
with tf.name_scope("accuracy"):
correct_prediction = tf.equal(tf.argmax(output,1), tf.argmax(y,1))
cast = tf.cast(correct_prediction, tf.float32)
accuracy = tf.reduce_mean(cast)
#create summary for the cost and accuracy
tf.summary.scalar("cost",cost)
tf.summary.scalar("accuracy", accuracy)
summary_op = tf.summary.merge_all()
logs_path = "ids/gru/summary_data"
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
writer=tf.summary.FileWriter(logs_path,graph = tf.get_default_graph())

61
for i in range (training_epochs):
_,summary=sess.run([optimizer,summary_op],feed_dict={x:X_train,y:Y_t
rain})
writer.add_summary(summary,i)
if (i) % display_step == 0:
print(i,"Cost for this epoch is",sess.run(cost,feed_dict={x
:X_train,y:Y_train}))
print ("Accuracy",accuracy.eval(feed_dict = {x:X_test,y:Y_test}))
print ("test Output is :", sess.run(output,feed_dict = {x:X_test, y:Y_test}))
print ("test labels are :", sess.run(y,feed_dict = {x:X_test, y:Y_test}))
print ("train labels are :", sess.run(x,feed_dict = {x:X_train, y:Y_train}))
pred_class=sess.run(tf.argmax(output,1),feed_dict={x:X_test,y:Y_test})
labels_class = sess.run(tf.argmax(y,1),feed_dict = {x:X_test,y:Y_test})
conf=tf.contrib.metrics.confusion_matrix(labels_class,pred_class,dtype=
tf.int32)
print ("confusion matrix \n", sess.run(conf, feed_dict={x:X_test, y
:Y_test}))
n = tf.cast(labels_class,tf.int64)
TP = conf[0,0]
FN = conf [0,1]
FP = conf[1,0]
TN = conf[1,1]
#Accuracy
Acc = (TP+TN)/(TP+FP+TN+FN)
print ("Accuracy calculated through confusion matrix", sess.run (Acc,
feed_dict = {x:X_test,y:Y_test}))
# Precision
Precision = TP/(TP+FP)
print ("Precision\n",sess.run(Precision,feed_dict ={x:X_test, y:Y_test}))

62
#Recall
Recall = TP/(TP+FN)
print ("Recall (DR)\n", sess.run(Recall,feed_dict={x:X_test,y:Y_test}))
#F score
FScore = 2*((Precision*Recall)/(Precision+Recall))
print ("F1 Score is \n",sess.run(FScore,{x:X_test, y:Y_test}))
#False Alarm Rate
FAR = FP/(FP+TN)
print ("False Alarm Rate is \n",sess.run(FAR,feed_dict
={x:X_test,y:Y_test}))

63
4.3 SCREEN SHOTS
Figure 4.1 Performance of the GRU-IDS model on the training dataset if number of
epochs=30.
Figure 4.2 Performance of the GRU-IDS model on the test dataset if number of
epochs=30.

64
Figure 4.3 Performance of the GRU-IDS model on the training dataset if number of
epochs=60.
Figure 4.4 Performance of the GRU-IDS model on the test dataset if number of
epochs=60.

65
Figure 4.5 Performance of the GRU-IDS model on the training dataset if number of
epochs=120.
Figure 4.6 Performance of the GRU-IDS model on the test dataset if number of
epochs=120.

66
Figure 4.7 Performance of the GRU-IDS model on the training dataset if number of
epochs=180.
Figure 4.8 Performance of the GRU-IDS model on the test dataset if number of
epochs=180.

67
Figure 4.9 Performance of the GRU-IDS model on the training dataset if number of
epochs=200.
Figure 4.10 Performance of the GRU-IDS model on the test dataset if number of
epochs=200.

68
Figure 4.11 Performance of the GRU-IDS model on the training dataset if number
of epochs=360.
Figure 4.12 Performance of the GRU-IDS model on the test dataset if number of
epochs=360.

69
4.4. EXPERIMENTAL ANALYSIS
Table 4.1 Performance measures of existing systems.
IDS SYSTEM Validation Accuracy Test Accuracy
SVM 99.55% 78.32%
KNN 99.42% 73.26%
NB 89.32% 75.62%
RF 99.73% 83.92%
ANN 99.49% 84.17%
RNN 97.53% 82.74%
LSTM 98.12% 85.42%
Table 4.2 Performance measures of the proposed system
Epochs Validation Accuracy Test Accuracy
30 80.19% 76.78%
60 94.74% 88.69%
120 95.90% 89.22%
180 96.43% 90.13%
200 96.60% 89.84 %
360 98.10% 90.06%

70
5. CONCLUSION AND FUTURE WORK
5.1. CONCLUSION
In this study, we designed a new Intrusion Detection System. We propose a new
model which uses GRUs as the main memory unit, combined with a Random Forest
Classifier as a feature selection method to identify network intrusions. Deep learning
techniques were used for training and achieved good performance. Experiments on the
well-known NSL-KDD dataset showed that the system has leading performance. The
overall detection rate was 96.89% on NSL-KDD, with false positive rates as low as 0.03%
and 0.1%, respectively. The experimental results show an accuracy rate of 98.10% on the
training dataset and 90.06% on the test dataset. This model outperforms all the other
existing Intrusion Detection Systems.
5.2. FUTURE WORK
In our future works, we intend to study the performance of individual classes of
attacks in the NSLKDD dataset using the GRU-IDS model. The next step could be to
optimize the system so that it can be applied to real network environments and be
implemented more efficiently and focus on decreasing the time complexity and increasing
the accuracy rate in detecting intrusions in a network.

71
6. REFERENCES
[1] Revathi S, Malathi A. A detailed analysis of NSL-KDD dataset using various machine
learning techniques for intrusion detection. International Journal of Engineering Research
& Technology (IJERT). 2013 Dec;2(12):1848-53.
[2] Bhupendra I, Yadav A. Performance analysis of NSL-KDD dataset using ANN. In 2015
international conference on signal processing and communication engineering systems
2015 Jan 2(pp. 92-96),IEEE.
[3] Shrivas AK, Dewangan AK. An ensemble model for classification of attacks with
feature selection based on KDD99 and NSL-KDD data set. International Journal of
Computer Applications.2014;99(15):8-13.
[4] Chae HS, Jo BO, Choi SH, Park TK. Feature selection for intrusion detection using
NSL-KDD. Recent advances in computer science.2013 Nov:184-7.
[5] Kasongo SM, Sun Y.A Deep Long Short-Term Memory based classifier for Wireless
Intrusion Detection System. ICT Express. 2019 Aug 22.
[6] Kasongo SM, Sun Y.A deep learning method with a filter-based feature engineering
for the wireless intrusion detection system. IEEE Access. 2019 Mar 18; 7:38597-607.
[7] Dhanabal L, Shantharajah SP. A study on NSL-KDD dataset for intrusion detection
system based on classification algorithms. International Journal of Advanced Research in
Computer and Communication Engineering. 2015 Jun;4(6):446-52.
[8] Farnaaz N,Jabbar M A.Random forest modeling for network intrusion detection system.
Procedia Computer Science.2016 Jan 1;89(1):213-7.

72
[9] Bhavsar YB, Waghmare KC. Intrusion detection system using data mining technique:
Support vector machine. International Journal of Emerging Technology and Advanced
Engineering. 2013 Mar;3(3):581-6.
[10] KS D, Ramakrishna BB. An artificial neural network-based intrusion detection system
and classification of attacks. International Journal of Engineering Research and
Applications. 2013.
[11] J. Kim, H. Kim, An effective intrusion detection classifier using longshort-term
memory with gradient descent optimization, in: IEEE Int. Conf. on Platform Technology
and Service, 2017, pp. 1–6.
[12] Yin C, Zhu Y, Fei J, He X. A deep learning approach for intrusion detection using
recurrent neural networks. IEEE Access.2017 Oct 12;5:21954-61.
[13] Sharma S, Gupta R K. Intrusion detection system: A review. International Journal of
Security and its Applications.2015;9(5):69-76.
[14] Allen J, Christie A, Fithen W, McHugh J, Picket J. State of the practice of intrusion
detection technologies. CARNEGIE-MELLON UNIV PITTSBURGH PA SOFTWARE
ENGINEERING INST; 2000 Jan.
[15] Reddy RR, Ramadevi Y, Sunitha KN. Effective discriminant function for intrusion
detection using SVM.in 2016 International Conference on Advances in Computing.
Communications and informatics (ICACCI) 2016 Sep 21(pp.1148-1153). IEEE.
[16] Li W, Yi P, Wu Y, Pan L, Li J.A new intrusion detection system based on KNN
classification algorithm in the wireless sensor network. Journal of Electrical and Computer
Engineering 2014.

73
[17] Sahu S, Mehtre BM. Network intrusion detection system using J48 Detection Tree. In
2015 International Conference on Advances in Computing, Communications, and
Informatics (ICACCI) 2015 Aug 10(pp. 2023-2026). IEEE.
[18] Ashraf N, Ahmad W, Ashraf R. A comparative study of data mining algorithms for
high detection rate in intrusion detection system. Annals of Emerging Technologies in
Computing (AETiC), Print ISSN. 2018:2516-0281.
74
APPENDICES

BASE PAPER

Received September 5, 2017, accepted October 5, 2017, date of publication October 12, 2017, date of current version November 7, 2017.
Digital Object Identifier 10.1109/ACCESS.2017.2762418
A Deep Learning Approach for IntrusionDetection Using Recurrent Neural NetworksCHUANLONG YIN , YUEFEI ZHU, JINLONG FEI, AND XINZHENG HEState Key Laboratory of Mathematical Engineering and Advanced Computing, Zhengzhou 450001, China
Corresponding author: Chuanlong Yin ([email protected])
This work was supported by the National Key Research and Development Program of China under Grant 2016YFB0801601and 2016YFB0801505.
ABSTRACT Intrusion detection plays an important role in ensuring information security, and the keytechnology is to accurately identify various attacks in the network. In this paper, we explore how to modelan intrusion detection system based on deep learning, and we propose a deep learning approach for intrusiondetection using recurrent neural networks (RNN-IDS). Moreover, we study the performance of the model inbinary classification and multiclass classification, and the number of neurons and different learning rateimpacts on the performance of the proposed model. We compare it with those of J48, artificial neuralnetwork, random forest, support vector machine, and other machine learning methods proposed by previousresearchers on the benchmark data set. The experimental results show that RNN-IDS is very suitable formodeling a classification model with high accuracy and that its performance is superior to that of traditionalmachine learning classification methods in both binary and multiclass classification. The RNN-IDS modelimproves the accuracy of the intrusion detection and provides a new research method for intrusion detection.
INDEX TERMS Recurrent neural networks, RNN-IDS, intrusion detection, deep learning, machine learning.
I. INTRODUCTIONWith the increasingly deep integration of the Internet andsociety, the Internet is changing the way in which peoplelive, study and work, but the various security threats thatwe face are becoming more and more serious. How to iden-tify various network attacks, especially unforeseen attacks,is an unavoidable key technical issue. An Intrusion DetectionSystem (IDS), a significant research achievement in the infor-mation security field, can identify an invasion, which could bean ongoing invasion or an intrusion that has already occurred.In fact, intrusion detection is usually equivalent to a classifi-cation problem, such as a binary or a multiclass classificationproblem, i.e., identifying whether network traffic behaviouris normal or anomalous, or a five-category classificationproblem, i.e., identifying whether it is normal or any one ofthe other four attack types: Denial of Service (DOS), Userto Root (U2R), Probe (Probing) and Root to Local (R2L).In short, the main motivation of intrusion detection is toimprove the accuracy of classifiers in effectively identifyingthe intrusive behaviour.
Machine learning methodologies have been widely usedin identifying various types of attacks, and a machine learn-ing approach can help the network administrator take the
corresponding measures for preventing intrusions.However, most of the traditional machine learning method-ologies belong to shallow learning and often emphasizefeature engineering and selection; they cannot effectivelysolve the massive intrusion data classification problem thatarises in the face of a real network application environment.With the dynamic growth of data sets, multiple classificationtasks will lead to decreased accuracy. In addition, shallowlearning is unsuited to intelligent analysis and the forecastingrequirements of high-dimensional learningwithmassive data.In contrast, deep learners have the potential to extract betterrepresentations from the data to create much better models.As a result, intrusion detection technology has experiencedrapid development after falling into a relatively slow period.
After Professor Hinton [1] proposed the theory of deeplearning in 2006, deep learning theory and technology under-went a meteoric rise in the field of machine learning.In this scenario, relevant theoretical papers and practicalresearch findings emerged endlessly and produced remark-able achievements, especially in the fields of speech recog-nition, image recognition [2] and action recognition [3]–[5].The fact that deep learning theory and technology has hada very rapid development in recent years means that a new
219542169-3536 2017 IEEE. Translations and content mining are permitted for academic research only.
Personal use is also permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
VOLUME 5, 2017

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
era of artificial intelligence has opened and offered a com-pletely new way to develop intelligent intrusion detectiontechnology.
Due to growing computational resources, recurrent neuralnetworks (RNNs) (which have been around for decades buttheir full potential has only recently started to become widelyrecognized, such as convolutional neural networks (CNNs))have recently generated a significant development in thedomain of deep learning [6]. In recent years, RNNs haveplayed an important role in the fields of computer vision,natural language processing (NLP), semantic understanding,speech recognition, language modelling, translation, picturedescription, and human action recognition [7]–[9], amongothers.
Because deep learning has the potential to extract betterrepresentations from the data to create much better models,and inspired by recurrent neural networks, we have proposeda deep learning approach for an intrusion detection systemusing recurrent neural networks (RNN-IDS). The main con-tributions of this paper are summarized as follows.
(1) We present the design and implementation of the detec-tion system based on recurrent neural networks. Moreover,we study the performance of the model in binary classifica-tion and multiclass classification, and the number of neuronsand different learning rate impacts on the accuracy.
(2) By contrast, we study the performance of the naivebayesian, random forest, multi-layer perceptron, support vec-tor machine and other machine learning methods in multi-class classification on the benchmark NSL-KDD dataset.
(3) We compare the performance of RNN-IDS with othermachine learning methods both in binary classification andmulticlass classification. The experimental results illustratethat RNN-IDS is very suitable for intrusion detection. Theperformance of RNN-IDS is superior to the traditional clas-sification method on the NSL-KDD dataset in both binaryand multiclass classification, and it improves the accuracy ofintrusion detection, thus providing a new research method forintrusion detection.
The remainder of this paper is organized as follows.In Section II, we review the related research in the field ofintrusion detection, especially how deep learning methodsfacilitate the development of intrusion detection. A descrip-tion of a RNN-based IDS architecture and the performanceevaluation measures are introduced in Section III. Section IVhighlights RNN-IDS with a discussion about the experimen-tal results and a comparison with a few previous studies usingthe NSL-KDD dataset. Finally, the conclusions are discussedin Section V.
II. RELEVANT WORKIn prior studies, a number of approaches based on tra-ditional machine learning, including SVM [10], [11],K-Nearest Neighbour (KNN) [12], ANN [13], Random For-est (RF) [14], [15] and others [16], [17], have been pro-posed and have achieved success for an intrusion detectionsystem.
In recent years, deep learning, a branch of machine learn-ing, has become increasingly popular and has been appliedfor intrusion detection; studies have shown that deep learningcompletely surpasses traditional methods. In [18], the authorsutilize a deep learning approach based on a deep neural net-work for flow-based anomaly detection, and the experimentalresults show that deep learning can be applied for anomalydetection in software defined networks. In [19], the authorspropose a deep learning based approach using self-taughtlearning (STL) on the benchmark NSL-KDD dataset in anetwork intrusion detection system. When comparing its per-formance with those observed in previous studies, the methodis shown to be more effective. However, this category ofreferences focuses on the feature reduction ability of thedeep learning. It mainly uses deep learning methods for pre-training, and it performs classification through the traditionalsupervision model. It is not common to apply the deep learn-ing method to perform classification directly, and there is alack of study of the performance in multiclass classification.
According to [20], RNNs are considered reduced-size neu-ral networks. In that paper, the author proposes a three-layer RNN architecture with 41 features as inputs and fourintrusion categories as outputs, and for misuse-based IDS.However, the nodes of layers are partially connected,the reduced RNNs do not show the ability of deep learn-ing to model high-dimensional features, and the authorsdo not study the performance of the model in the binaryclassification.
With the continuous development of big data and comput-ing power, deep learning methods have blossomed rapidly,and have been widely utilized in various fields. Followingthis line of thinking, a deep learning approach for intrusiondetection using recurrent neural networks (RNN-IDS) is pro-posed in this paper. Compared with previous works, we usethe RNN-based model for classification rather than for pre-training. Besides, we use the NSL-KDD dataset with a sep-arate training and testing set to evaluate their performancesin detecting network intrusions in both binary and multiclassclassification, and we compare it with J48, ANN, RF, SVMand other machine learning methods proposed by previousresearchers.
III. PROPOSED METHODOLOGIESRecurrent neural networks include input units, output unitsand hidden units, and the hidden unit completes the mostimportant work. The RNN model essentially has a one-wayflow of information from the input units to the hidden units,and the synthesis of the one-way information flow from theprevious temporal concealment unit to the current timinghiding unit is shown in Fig. 1. We can regard hidden units asthe storage of the whole network, which remember the end-to-end information. When we unfold the RNN, we can findthat it embodies the deep learning. A RNNs approach can beused for supervised classification learning.
Recurrent neural networks have introduced a directionalloop that can memorize the previous information and apply
VOLUME 5, 2017 21955

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
FIGURE 1. Recurrent Neural Networks (RNNs).
FIGURE 2. Block diagram of proposed RNN-IDS.
it to the current output, which is the essential differencefrom traditional Feed-forward Neural Networks (FNNs). Thepreceding output is also related to the current output of asequence, and the nodes between the hidden layers are nolonger connectionless; instead, they have connections. Notonly the output of the input layer but also the output of thelast hidden layer acts on the input of the hidden layer.
The step involved in RNN-IDS is shown in Fig. 2.
A. DATASET DESCRIPTIONThe NSL-KDD dataset [21], [22] generated in 2009 is widelyused in intrusion detection experiments. In the latest liter-ature [23]–[25], all the researchers use the NSL-KDD asthe benchmark dataset, which not only effectively solvesthe inherent redundant records problems of the KDD Cup1999 dataset but also makes the number of records reasonablein the training set and testing set, in such a way that the classi-fier does not favour more frequent records. The dataset coversthe KDDTrain+ dataset as the training set and KDDTest+ andKDDTest−21 datasets as the testing set, which has different
TABLE 1. Different classifications in the NSL-KDD dataset.
TABLE 2. Features of NSL-KDD dataset.
normal records and four different types of attack records,as shown in Table 1. The KDDTest−21 dataset is a subset ofthe KDDTest+ and is more difficult for classification.There are 41 features and 1 class label for every traf-
fic record, and the features include basic features (No.1-No.10), content features (No.11 - No.22), and traffic features(No.23 - No.41) as shown in Table 2. According to theircharacteristics, attacks in the dataset are categorized into fourattack types: DoS (Denial of Service attacks), R2L (Root toLocal attacks), U2R (User to Root attack), and Probe (Prob-ing attacks). The testing set has some specific attack typesthat disappear in the training set, which allows it to provide amore realistic theoretical basis for intrusion detection.
B. DATA PREPROCESSING1) NUMERICALIZATIONThere are 38 numeric features and 3 nonnumeric fea-tures in the NSL-KDD dataset. Because the input value ofRNN-IDS should be a numeric matrix, we must convert somenonnumeric features, such as ‘protocol_type’, ‘service’ and‘flag’ features, into numeric form. For example, the feature‘protocol_type’ has three types of attributes, ‘tcp’, ‘udp’,and ‘icmp’, and its numeric values are encoded as binary
21956 VOLUME 5, 2017

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
vectors (1,0,0), (0,1,0) and (0,0,1). Similarly, the feature‘service’ has 70 types of attributes, and the feature ‘flag’has 11 types of attributes. Continuing in this way, 41-dimensional features map into 122-dimensional features aftertransformation.
2) NORMALIZATIONFirst, according to some features, suchas ‘duration[0,58329]’,‘src_bytes[0,1.3 × 109]’ and ‘dst_bytes[0,1.3 × 109]’,where the difference between the maximum and minimumvalues has a very large scope, we apply the logarithmicscaling method for scaling to obtain the ranges of ‘dura-tion[0,4.77]’, ‘src_bytes[0,9.11]’ and ‘dst_bytes[0,9.11]’.Second, the value of every feature is mapped to the [0,1] rangelinearly according to (1), where Max denotes the maximumvalue and Min denotes minimum value for each feature.
xi =xi −MinMax −Min
(1)
C. METHODOLOGYIt is obvious that the training of the RNN-IDS model consistsof two parts - Forward Propagation and Back Propagation.Forward Propagation is responsible for calculating the out-put values, and Back Propagation is responsible for passingthe residuals that were accumulated to update the weights,which is not fundamentally different from the normal neuralnetwork training.
FIGURE 3. The unfolded Recurrent Neural Network.
According to Fig. 1, an unfolded recurrent neural networkis presented in Fig. 3. The standard RNN is formalized as fol-lows: Given training samples xi(i = 1, 2, . . ., m), a sequenceof hidden states hi (i = 1, 2, . . ., m), and a sequence ofpredictions yi(i = 1, 2, . . ., m). Whx is the input-to-hiddenweight matrix, Whh is the hidden-to-hidden weight matrix,Wyh is the hidden-to-output weight matrix, and the vectors bhand by are the biases [26]. The activation function e is a sig-moid, and the classification function g engages the SoftMaxfunction.
Refer to Fig. 3 and [26], Forward Propagation AlgorithmandWeights Update Algorithm are described as Algorithms 1and 2 respectively.
The objective function associated with RNNs for a singletraining pair (xi, yi) is defined as f(θ ) =L(yi : yi) [26],where L is a distance function which measures the deviationof the predictions yi from the actual labels yi. Let η be thelearning rate and k be the number of current iterations. Givena sequence of labels yi(i = 1, 2, . . ., m).
Algorithm 1 Forward Propagation AlgorithmInput xi(i = 1, 2, . . ., m)Output yi1: for i from 1 to m do2: tι =Whxxi +Whhhi−1+bh3: hi = sigmoid (ti)4: si =Wyhhi+by5: yi = SoftMax (si)6: end for
Algorithm 2 Weights Update AlgorithmInput 〈yi, yi〉(i = 1, 2, . . ., m)Initialization θ = {Whx ,Whh, Wyh, bh, by}Output θ = {Whx ,Whh,Wyh, bh, by}1: for i from k downto 1 do2: Calculate the cross entropy between theoutput value and the label value: L(yi: yi) ← -∑
i∑
j yij log (yij)+ (1− yij) log(1− yij)3: Compute the partial derivative with respect to θi :δi← dL/dθi4: Weight update: θi← θiη + δi5: end for
D. EVALUATION METRICSIn our model, the most important performance indica-tor (Accuracy, AC) of intrusion detection is used to measurethe performance of the RNN-IDS model. In addition to theaccuracy, we introduce the detection rate and false positiverate. The True Positive (TP) is equivalent to those correctlyrejected, and it denotes the number of anomaly records thatare identified as anomaly. The False Positive (FP) is theequivalent of incorrectly rejected, and it denotes the numberof normal records that are identified as anomaly. The TrueNegative (TN) is equivalent to those correctly admitted, andit denotes the number of normal records that are identified asnormal. The False Negative (FN) is equivalent to those incor-rectly admitted, and it denotes the number of anomaly recordsthat are identified as normal. Table 3 shows the definition ofconfusion matrix. We have the following notation:
Accuracy: the percentage of the number of records classi-fied correctly versus total the records shown in (2).
AC =TP+ TN
TP+ TN+ FP+ FN(2)
True Positive Rate (TPR): as the equivalent of the Detec-tion Rate (DR), it shows the percentage of the number ofrecords identified correctly over the total number of anomalyrecords, as shown in (3).
TPR =TP
TP+ FN(3)
False Positive Rate (FPR): the percentage of the number ofrecords rejected incorrectly is divided by the total number of
VOLUME 5, 2017 21957

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
TABLE 3. Confusion matrix.
normal records, as shown in (4).
FPR =FP
FP+ TN(4)
Hence, the motivation for the IDS is to obtain a higheraccuracy and detection rate with a lower false positive rate.
IV. EXPERIMENT RESULTS AND DISCUSSIONIn this research, we have used one of the most current andbroadest deep learning frameworks - Theano [27]. The exper-iment is performed on a personal notebook ThinkPad E450,which has a configuration of an Intel Core i5-5200U [email protected] GHz, 8 GB memory and does not use GPU accel-eration. Two experiments have been designed to study theperformance of the RNN-IDS model for binary classifica-tion (Normal, anomaly) and five-category classification, suchas Normal, DoS, R2L, U2R and Probe. In order to comparewith other other machine learning methods, contrast experi-ments are designed at the same time. In the binary classifica-tion experiments, we have compared the performance with anANN, naive Bayesian, random forest, multi-layer perceptron,support vector machine and other machine learning methods,as mentioned in [13] and [21]. In the same way, we analysethe multi-classification of the RNN-IDS model based on theNSL-KDD dataset. By contrast, we study the performanceof the ANN, naive Bayesian, random forest, multi-layer per-ceptron, support vector machine and other machine learningmethods in the five-category classification. Finally, we com-pare the performance of the RNN-IDS model with traditionalmethods. Furthermore, we construct the dataset refer to [20]and compare the performance with the reduced-size RNNmethod.
A. BINARY CLASSIFICATIONIn Sec B, we have mapped 41-dimensional features into122-dimensional features, thus the RNN-IDS model has 122input nodes, and 2 output nodes in the binary classificationexperiments. The number of epochs are given 100. To trainthe better model, let the number of hidden nodes be 20,60, 80, 120, and 240 respectively, the learning rate be 0.01,0.1 and 0.5 respectively, then we observe the classificationaccuracy on the NSL-KDD dataset as shown in Table 4. Thedifferent results we obtain show that the accuracy is relate tothe number of hidden nodes and the learning rate.
In our experiment, the model gets a higher accuracy,when there are 80 hidden nodes and the learning rate is 0.1.Table 5 shows the confusion matrix of the RNN-IDS on the
TABLE 4. The accuracy and training time (second) of RNN-IDS withdifferent learning rate and hidden nodes.
TABLE 5. Confusion matrix of 2-category classification on KDDTEST+.
testing set KDDTest+ in the 2-category classification exper-iments. The experiments show that RNN-IDS works with agood detection rate (83.28%) when given 100 epochs for theKDDTrain+ dataset. We obtain 68.55% for the KDDTest−21
dataset and 99.81% for the KDDTrain+ dataset as shownin Fig. 4.
In [21], the authors have shown the results obtained by J48,Naive Bayesian, Random Forest, Multi-layer Perceptron,Support Vector Machine and the other classification algo-rithms, and the artificial neural network algorithm also gives81.2% in [13], which is the recent literature about ANNalgorithms applied in the filed of intrusion detection. Fortu-nately, these results are all based on the same benchmark - theNSL-KDD dataset. Obviously, the performance of RNN-IDSmodel is superior to other classification algorithms in binaryclassification as shown in Fig. 5.
B. MULTICLASS CLASSIFICATIONIn the five-category classification experiments, we find thatthe model has higher accuracy on the KDDTest+ when thereare 80 hidden nodes in the RNN-IDS model, meanwhile the
21958 VOLUME 5, 2017

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
FIGURE 4. The Accuracy on the KDDTest+ and KDDTest−21 datasets in theBinary Classification.
FIGURE 5. Performance of RNN-IDS and the other models in the binaryclassification.
learning rate is 0.5, and the training is performed 80 timesfrom Table 6.
In order to compare the performance of different classi-fication algorithms on the benchmark dataset for the multi-calss classification as the binary classification experimentsJ48, Naive Bayesian, Random Forest, Multi-layer Percep-tron, Support Vector Machine and other machine learningalgorithms are used to train models through the trainingset (using 10-layer cross-validation) by mean of the open-sourcemachine learning and datamining softwareWeka [28].We then apply the models to the testing set. The results aredescribed in Fig. 6. Compared with the binary classification,the accuracy of classification algorithms is declined in thefive-category classification.
Table 7 shows the confusion matrix of the RNN-IDS onthe test set KDDTest+ in the five-category classificationexperiments. The experiment shows that the accuracy of themodel is 81.29% for the test set KDDTest+ and 64.67% forKDDTest−21, which is better than those obtained using J48,
TABLE 6. The accuracy and training time (second) of RNN-IDS withdifferent learning rate and hidden nodes.
FIGURE 6. Performance of RNN-IDS and the other models in thefive-category classification.
naive bayes, random forest, multi-layer perceptron and theother classification algorithms. In addition, it is better than theartificial neural network algorithm on the test set KDDTest+,which obtained 79.9% in the literature [13]. Table 8 showsthe detection rate and false positive rate of the different attacktypes.
In order to compare the performance of RNN-IDS withthe reduced-size RNN method proposed in [20], we con-structed the training set and testing set from KDD CUP1999 dataset according to the paper. The training and testing
VOLUME 5, 2017 21959

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
TABLE 7. Confusion matrix for the five-category experiments onKDDTest+.
TABLE 8. Results of the evaluation metrics for the five-categoryclassification.
TABLE 9. Different classifications in the training and testing sets
sets are described in detail in Table 9. In this experiment,the detection rate of the RNN-IDS model gets 97.09% on thetesting dataset, not only higher than the detection rate on theNSL-KDD dataset, but also higher than 94.1% in the lit-erature [20]. The experimental results show that the fullyconnected model has stronger modeling ability and higherdetection rate than the reduced-size RNN model. The train-ing of our model (20 hidden nodes, the learning rate is0.1, and epochs are 50) spends 1765 seconds without anyGPU acceleration, which more than 1383 seconds in theliterature [20].
C. DISCUSSIONBased on the same benchmark, using KDDTrain+ as thetraining set and KDDTest+ and KDDTest−21 as the test-ing set, the experimental results show that for both binaryand multiple classification, the intrusion detection model ofRNN-IDS training through the training set has higher accu-racy than the other machine learningmethods andmaintains ahigh accuracy rate, even in the case of multiple classification.Of course, the model we proposed will spend more time for
training, but using GPU acceleration can reduce the trainingtime.
V. CONCLUSIONSThe RNN-IDS model not only has a strong modelling abilityfor intrusion detection, but also has high accuracy in bothbinary and multiclass classification. Compared with tradi-tional classification methods, such as J48, naive bayesian,and random forest, the performance obtains a higher accu-racy rate and detection rate with a low false positive rate,especially under the task of multiclass classification on theNSL-KDD dataset. The model can effectively improve boththe accuracy of intrusion detection and the ability to recognizethe intrusion type. Of course, in the future research, we willstill pay attention to reduce the training time using GPUacceleration, avoid exploding and vanishing gradients, andstudy the classification performance of LSTM, BidirectionalRNNs algorithm in the field of intrusion detection.
REFERENCES[1] Y. LeCun, Y. Bengio, and G. Hinton, ‘‘Deep learning,’’ Nature, vol. 521,
no. 7553, pp. 436–444, May 2015.[2] J. Schmidhuber, ‘‘Deep learning in neural networks: An overview,’’Neural
Netw., vol. 61, pp. 85–117, Jan. 2015.[3] L. Liu, L. Shao, X. Li, and K. Lu, ‘‘Learning spatio-temporal represen-
tations for action recognition: A genetic programming approach,’’ IEEETrans. Cybern., vol. 46, no. 1, pp. 158–170, Jan. 2016.
[4] A.-A. Liu, Y.-T. Su, W.-Z. Nie, and M. Kankanhalli, ‘‘Hierarchical cluster-ing multi-task learning for joint human action grouping and recognition,’’IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 1, pp. 102–114,Jan. 2017.
[5] J. Wu, Y. Zhang, and W. Lin, ‘‘Good practices for learning to recognizeactions using FV and VLAD,’’ IEEE Trans. Cybern., vol. 46, no. 12,pp. 2978–2990, Dec. 2016.
[6] A. Karpathy. (2015). The unreasonable effectiveness of recurrentneural networks. Andrej Karpathy Blog. [Online]. Available: http://karpathy.github.io/2015/05/21/rnn-effectiveness/
[7] X. Peng, L. Wang, X. Wang, and Y. Qiao, ‘‘Bag of visual words and fusionmethods for action recognition: Comprehensive study and good practice,’’Comput. Vis. Image Understand., vol. 150, pp. 109–125, Sep. 2016.
[8] A.-A. Liu, Y.-T. Su, P.-P. Jia, Z. Gao, T. Hao, and Z.-X. Yang,‘‘Multiple/single-view human action recognition via part-induced mul-titask structural learning,’’ IEEE Trans. Cybern., vol. 45, no. 6,pp. 1194–1208, Jun. 2015.
[9] W. Nie, A. Liu, W. Li, and Y. Su, ‘‘Cross-view action recognition by cross-domain learning,’’ Image Vis. Comput., vol. 55, pp. 109–118, Nov. 2016.
[10] F. Kuang,W. Xu, and S. Zhang, ‘‘A novel hybrid KPCA and SVMwith GAmodel for intrusion detection,’’ Appl. Soft Comput., vol. 18, pp. 178–184,May 2014.
[11] R. R. Reddy, Y. Ramadevi, and K. V. N. Sunitha, ‘‘Effective discriminantfunction for intrusion detection using SVM,’’ in Proc. Int. Conf. Adv.Comput., Commun. Inform. (ICACCI), Sep. 2016, pp. 1148–1153.
[12] W. Li, P. Yi, Y. Wu, L. Pan, and J. Li, ‘‘A new intrusion detection sys-tem based on KNN classification algorithm in wireless sensor network,’’J. Elect. Comput. Eng., vol. 2014, Jun. 2014, Art. no. 240217.
[13] B. Ingre and A. Yadav, ‘‘Performance analysis of NSL-KDD dataset usingANN,’’ in Proc. Int. Conf. Signal Process. Commun. Eng. Syst., Jan. 2015,pp. 92–96.
[14] N. Farnaaz and M. A. Jabbar, ‘‘Random forest modeling for networkintrusion detection system,’’ Procedia Comput. Sci., vol. 89, pp. 213–217,Jan. 2016.
[15] J. Zhang, M. Zulkernine, and A. Haque, ‘‘Random-forests-based networkintrusion detection systems,’’ IEEE Trans. Syst., Man, Cybern. C, Appl.Rev., vol. 38, no. 5, pp. 649–659, Sep. 2008.
[16] J. A. Khan and N. Jain, ‘‘A survey on intrusion detection systems andclassification techniques,’’ Int. J. Sci. Res. Sci., Eng. Technol., vol. 2, no. 5,pp. 202–208, 2016.
21960 VOLUME 5, 2017

C. Yin et al.: Deep Learning Approach for Intrusion Detection Using Recurrent Neural Networks
[17] A. L. Buczak and E. Guven, ‘‘A survey of data mining and machinelearning methods for cyber security intrusion detection,’’ IEEE Commun.Surveys Tuts., vol. 18, no. 2, pp. 1153–1176, 2nd Quart., 2016.
[18] A. Javaid, Q. Niyaz, W. Sun, and M. Alam, ‘‘A deep learning approach fornetwork intrusion detection system,’’ presented at the 9th EAI Int. Conf.Bio-inspired Inf. Commun. Technol. (BIONETICS), New York, NY, USA,May 2016, pp. 21–26.
[19] T. A. Tang, L. Mhamdi, D. McLernon, S. A. R. Zaidi, and M. Ghogho,‘‘Deep learning approach for network intrusion detection in soft-ware defined networking,’’ in Proc. Int. Conf. Wireless Netw. MobileCommun. (WINCOM), Oct. 2016, pp. 258–263.
[20] M. Sheikhan, Z. Jadidi, and A. Farrokhi, ‘‘Intrusion detection usingreduced-size RNN based on feature grouping,’’ Neural Comput. Appl.,vol. 21, no. 6, pp. 1185–1190, Sep. 2012.
[21] M. Tavallaee, E. Bagheri, W. Lu, and A. A. A. Ghorbani, ‘‘A detailedanalysis of the KDDCUP 99 data set,’’ inProc. IEEE Symp. Comput. Intell.Secur. Defense Appl., Jul. 2009, pp. 1–6.
[22] S. Revathi andA.Malathi, ‘‘A detailed analysis onNSL-KDDdataset usingvarious machine learning techniques for intrusion detection,’’ Int. J. Eng.Res. Technol., vol. 2, pp. 1848–1853, Dec. 2013.
[23] N. Paulauskas and J. Auskalnis, ‘‘Analysis of data pre-processing influenceon intrusion detection using NSL-KDD dataset,’’ in Proc. Open Conf.Elect., Electron. Inf. Sci. (eStream), Apr. 2017, pp. 1–5.
[24] P. S. Bhattacharjee, A. K. M. Fujail, and S. A. Begum, ‘‘Intrusion detectionsystem for NSL-KDD data set using vectorised fitness function in geneticalgorithm,’’ Adv. Comput. Sci. Technol., vol. 10, no. 2, pp. 235–246, 2017.
[25] R. A. R. Ashfaq, X.-Z. Wang, J. Z. Huang, H. Abbas, and Y.-L. He,‘‘Fuzziness based semi-supervised learning approach for intrusion detec-tion system,’’ Inf. Sci., vol. 378, pp. 484–497, Feb. 2017.
[26] J. Martens and I. Sutskever, ‘‘Learning recurrent neural networks withhessian-free optimization,’’ presented at the 28th Int. Conf. Int. Conf.Mach. Learn., Bellevue, WA, USA, Jul. 2011, pp. 1033–1040.
[27] Welcome: Theano 0.9.0 Documentation. Accessed: Feb. 2017. [Online].Available: http://deeplearning.net/software/theano/
[28] Weka 3–Data Mining With Open Source Machine LearningSoftware in Java. Accessed: Dec. 2016. [Online]. Available:http://www.cs.waikato.ac.nz/ml/weka/
CHUANLONG YIN was born in 1985. He iscurrently pursuing the Ph.D. degree with theState Key Laboratory of Mathematical Engineer-ing and Advanced Computing. His research areasare intrusion detection and information security.
YUEFEI ZHU was born in 1962. He is currentlya Professor and a Doctoral Supervisor with theState Key Laboratory of Mathematical Engineer-ing and Advanced Computing. His research areasare intrusion detection, cryptography, and infor-mation security.
JINLONG FEI was born in 1980. He is currentlyan Associate Professor with the State Key Labora-tory of Mathematical Engineering and AdvancedComputing. His research areas are network trafficanalysis and information security.
XINZHENG HE was born in 1978. He is cur-rently pursuing the Ph.D. degree with the StateKey Laboratory of Mathematical Engineering andAdvanced Computing. His research areas are bigdata and information security.
VOLUME 5, 2017 21961

PROJECT PAPER

INTRUSION DETECTION SYSTEM USING
GATED RECURRENT NEURAL
NETWORKS
MRS. G PRANITHA
DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING
Anil Neerukonda Institute of Technology and Sciences, Visakhapatnam, Andhra Pradesh, India
D. KIRAN MAHESH REDDY, B. DEEPIKA, G. ALEKHYA, CH.N.VENNELA DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING
Anil Neerukonda Institute of Technology and Sciences, Visakhapatnam, Andhra Pradesh, India
[email protected], [email protected], [email protected],
Abstract- As use of the net and related technologies which are spreading around the world, the use of those networks
now creates new threats for organizations. An Intrusion detection system(IDS) plays a major role in preserving network
security. During this paper, we propose a deep learning-based Intrusion Detection System using recurrent neural
networks with gated recurrent units(GRU-IDS). The dataset used for evaluating the GRU-IDS is that the NSL-KDD
dataset. To chop back the dimensionality of the NSL-KDD dataset we used a Random Forest classifier for feature
selection. The experimental result suggests that the performance of GRU-IDS is superior compared to traditional
machine learning classification methods.
Keywords- Intrusion detection, Recurrent Neural Network, Gated Recurrent Unit, GRU-IDS, machine learning, deep
learning.
I. INTRODUCTION
The Intrusion Detection System(IDS) assists in preserving the network free from various kinds of attacks by using it
as a software in various computer or network systems. An intrusion detection system(IDS) inspects all outbound and
inbound network actions and finds out the doubtful patterns which will point to network or system intrusion or
attack from someone trying to crack into or conciliate a system[1]. The type of detection techniques seen in
Intrusion detection system are misuse detection and anomaly detection[2]. A misuse detection must know the
attributes or signatures of intrusion. The most drawback of misuse detection is it’s going to be unsuccessful to detect
new attacks. In Anomaly-based IDS, this IDS system first defines the conventional behavior of the network and so
checks whether the particular behavior deviates from the conventional behavior or not, supported that comparison it
defines unknown attacks.
The traditional machine learning technologies like SVMs[3], ANNs[10], Random Forest[4], Naive Bayes[5],
KNN[6] and J48[7] are examined that they show lower accuracy rate in intrusion detection. So we’ve decided to
create up an IDS model that may detect abnormal behavior within the network and generate more accuracy rate in
intrusion detection.
1.1 Intrusion Detection System
In the modern network, IDS has become an important part of all-over network security architecture. Firstly we’d like
to grasp the Intrusion before Intrusion Detection System. Intrusion refers to unauthorized access to a system or a
service by compromising the system to enter into an insecure state. An Intrusion will be featured in terms of
Confidentiality, Integrity, Availability. Confidentiality indicates protecting information from unauthorized users.
Integrity ensures that the information is accurate and safeguarded even after an intruder’s modification. Availability
brings up the power of the user to access information incorrectly format. The user who does intrusion is termed an
intruder, who leaves some traces which are being detected by an Intrusion detection system. The intrusion detection
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com154

system monitors the network to seek out any malicious activity and issues conscious of the administrator. Modern
network-based environments need IDS for safe communication between the organizations. Some IDS are capable of
responding to detected intrusion upon discovery. Those are called IPS(Intrusion Prevention System).
1.2 Random forest classifier
Random forest classifier falls under supervised learning and it’s an ensemble algorithm. Ensemble methods use
multiple learning algorithms to get higher predictive performance than usually compared to any of the constituent
learning algorithms. Random forest classifiers are used for feature selection where it creates decision trees from a
randomly selected subset of the training dataset. Each tree within the random forest has its own predicted class value
and also the class with most of the votes becomes the prediction class for our model. The primary choice of selecting
this classifier is that it doesn’t overfit. The study on this classifier shows that it generates more accuracy on the nsl-
kdd test dataset[4]. Hence after a change in some trees, they have an inclination to own a continuing performance.
Using this classifier we have an opportunity of getting an accurate value of 99.13%.
1.3 Recurrent Neural Network(RNN)
Neural networks are a gaggle of algorithms, modelled supported the working of the human brain, that are designed
to acknowledge patterns. All real-world data, images, sound must be translated into numerical series because neural
networks recognize numerical patterns, contained in vectors. Recurrent Neural Network usually process sequences
where the output from the preceding step is fed as input to the current step. An RNN consists of the input layer (xt),
a hidden layer (ht), and an output layer (ot). RNNs are different from the normal feedforward neural networks
because it consists of a directional loop that acts as a memory for storing the previous state's information and for all
the inputs they use the same parameters which reduce the complexity of RNNs. Hidden layers will be quite one
depending upon the complexity of the project.
FIGURE 1.Unfolded Structure of Recurrent Neural Networks
As shown in Figure 1 U,V, and W are used as weight matrices. U matrix is used between the input to hidden layer
units, W matrix is used between the hidden to hidden layer units, and the V matrix is used between hidden and the
output layer units.
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com155

1.4 Gated Recurrent Unit
Gated Recurrent Unit (GRU) came into existence to overcome the vanishing gradient hassle that is seen in the
regular RNN. GRU was build by using two gates the update and the reset gates. The update gate helps the model to
determine how much past information is needed to be passed along the future. The reset gate is mainly used to select
how much of the past information needs to be forgotten. The reset gate helps the GRU-IDS model to remove
unwanted information in the future.
FIGURE 2. Structure of GRU
Where,
xₜ = input at time step t.
hₜ = hidden layer input at time step t.
zₜ = update gate output at time step t.
rₜ = reset gate output at time step t.
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com156

II. RELATED WORK
S.Revathi, A Malathi (2013)[8], done a detailed study on NSL-KDD dataset. They found out that the NSL-KDD
dataset consists of four classes of attacks and one normal class. They have used data mining techniques like J48,
Random forest, Naïve Bayes, CART and SVM to find attack classes from the normal class. The Random Forest
Classifier shows good results on the test dataset accuracy.
Bhupendra Ingre, Anamika Yadav (2015)[9], proposed an Intrusion Detection System using ANN and calculated
various performance measures like Accuracy, Detection Rate, and False Positive Rate. This model shows an
accuracy rate of 81.2% and 79.9% on the train and test NSL-KDD datasets.
AK Shrivas, AK Dewangan (2014)[10], proposed an Intrusion Detection System which is a combination of ANN
and Bayesian net classifier and uses the Gain ratio for reducing the feature vector. This model gave an accuracy of
99.42% with KDD99 and 98.07% with the NSL-KDD data set. So we are considering this and providing result
which is similar to this model.
H Chae, B jo, SH Choi, T Park (2013)[11], proposed a new feature selection method using feature average of total
and each class. They also used a feature reduction algorithm called Decision tree classifier to reduce the
dimensionality of the input vector.
C Yin, Y Zhu, J Fei, X He (2017)[12], developed an Intrusion Detection System using Recurrent neural networks.
This Intrusion Detection System is trained and tested using the benchmarked NSL-KDD dataset. This model was
then compared with the traditional machine learning classifiers like Support Vector Machines, Random Forest,
Naive Bayes, and J48. The metrics used for evaluating the RNN-IDS was the detection rate and accuracy. This
model shows an accuracy rate of 99.81% and 83.3% on the train and test NSL-KDD datasets.
SM Kasongo, Y Sun (2019)[13], proposed an Intrusion Detection System using the technique of Deep Long Short-
Term Memory(DLSTM) for storing the past information without losing it with time. This model outperforms over
the methods such as Deep Feed-forward Neural Networks, Support Vector Machines, k-Nearest Neighbors, Random
Forests and Naive Bayes. A feature selection algorithm based on information gain was used to reduce the feature
vector. To achieve better results Information gain feature selection method was used. The accuracy of this model on
the training and testing datasets was 99.51% and 86.99%.
SM Kasongo, Y Sun (2019)[14], a Deep Learning method using feed-forward deep neural networks(FFDNN)
besides a feature selection algorithm using information gain(IG) was used. In this work, the FFDNN with IG was
evaluated on the nsl-kdd intrusion detection dataset. This model FFDNN-IDS outperforms over various other
models like k-Nearest Neighbors(KNN), Naive Bayes, Support Vector Machine(SVM), Random Forest (RF) and
Decision Trees(DT). This model shows an accuracy rate of 99.37% and 86.76% on the train and test NSL-KDD
datasets.
III. DATASET DESCRIPTION
In our work to deal with the detection of intrusions we have taken the standard NSL-KDD dataset which is an
updated version of kdd cup 99. The advantages of the nsl-kdd dataset are
I. The dataset consists of distinct records so that the classifiers will not produce any biased result.
II. No overfitting of the result.
The NSL-KDD dataset is composed of 41 attributes and one categorized attribute. The training is performed on the
nsl-kdd train dataset which contains 22 attack types and testing is performed on the nsl-kdd test dataset which
contains additional 17 attack types. The attack classes present in nsl-kdd dataset are grouped into four categories
1.Denial of service(DoS): The authorized users will be blocked by intruders from using their service.
2.Probe: This attack collects information about potential vulnerabilities of the target system that can be later used to
launch attacks on that system
3.Remote to Local(R2L): Unauthorized users gain privileges as a root user by dumping the data packets to remote
systems over a network and do unauthorized activities.
4.User to Root(U2R): Intruders access the administrative privileges by entering into the network as normal users.
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com157

IV. PROPOSED SYSTEM
We have developed an Intrusion Detection System using a Recurrent Neural Network with the gated recurrent units.
The recurrent neural network comprises the input unit, hidden unit, and output units. The hidden unit consists of all
mathematical computations. We are taking nsl-kdd dataset as input and it consists of the training and the testing
datasets. First the input data has to be pre-processed to remove any irrelevant data and then we applied Feature
Selection on the target data to reduce the dimensionality of the input data. Then, we fed this input data to the
Recurrent Neural Networks with GRU units to train the GRU-IDS and finally test the proposed model with the nsl-
kdd test dataset.
FIGURE 3.Proposed System
4.1 DATA PREPROCESSING
1) Conversion of Non-Numeric values to Numeric values
The GRU-IDS can accept only numeric values as input. The NSL-KDD dataset consists of 41 features out of which
38 are in numerical form and 3 are of string datatype. The non-numeric features are labelled as ‘protocol_type’,
‘service’ and ‘flag’ which are of string type to be converted into numeric form. To do this we used the Hot encoding
technique to convert the non-numeric features to numeric features.
2) Normalization
The GRU-IDS works with the input which is only in the range of 0 to 1. As the input data we get is not in the
specific range[0-1]. So here we applied a Min-max scaling technique to scale the input data in the range between 0
to 1. The below equation was applied to each input feature in the nsl-kdd dataset.
I’= ( I- minⱼ) / ( maxⱼ - minⱼ)
In the above equation, I is the unnormalized value of a particular attribute, I’ is the changed value of the attribute
which is in the normalized form and maxⱼ and minⱼ are the maximum and minimum values of the jth attribute.
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com158

4.2 Feature Selection
The NSL-KDD dataset has 41 attributes and one class attribute. From those 41 attributes, some of the attributes will
not be useful in the detection of intrusion. So, we are using the random forest classifier to remove some of the
unimportant attributes of the train and test datasets that resolves the problem of overfitting and decrease the training
time of the GRU-IDS model.
4.3 Designing of the Gated Recurrent Unit
In our work, the proposed system GRU-IDS takes the nsl-kdd train dataset as a input vector (Xₜ) and multiplies it
with the weight matrix(Wz ). From the hidden layer of the previous time step, we take ht-1 as input which gives past
information and then it is also multiplied by the weight matrix (Uz). Wz*Xt and Uz*Xt were added together and
passed to the SoftMax function to get the update gate’s output(Zt) in the range between 0 to 1. This operation will be
useful to prevent the vanishing gradient problem because the model keeps track of all the past information without
any loss. In the same way, the reset gate(rt) is constructed. Now we make use of the reset and update gates in the
GRU cell as shown in Figure 2. To store the relevant information from the past we use the reset gate(rt). First, we
multiply Xt with a weight matrix Wh. Secondly, we apply Hadamard product between the reset gate rt and ht-1 and
sum the result of Hadamard product with Wh*Xt and apply tanh activation function to the obtained result and store
the result in ht’ which stores only the relevant information from the past called as current memory content. Finally
we calculate the final memory at time step t. Now we make use of the update gate(Zt) which consists of the
information to be passed at time step t. Calculate element-wise multiplication between Zt and ht’ and between 1-Zt
and ht-1 then sum up both of them and store the result in ht. The ht will tell the GRU model how much of the past
information to be useful; this will make the GRU model train perfectly without any loss of the past information
V. EVALUATION METRICS
To examine the performance of the GRU-IDS we specifically used Accuracy(AC) as a performance indicator. The
other performance measures used are Detection Rate, and False Positive Rate. The output of the GRU-IDS model is
categorized based on the following four conditions:
True Positive (TP): The number of anomaly records that are correctly classified as anomaly.
False Positive(FP): The number of normal records that are incorrectly classified as anomaly.
True Negative(TN): The number of normal records that are correctly classified as normal.
False Positive(FN): The number of anomaly records that are incorrectly classified as normal.
From the above-defined TP, FP, TN, FN metrics we can define Accuracy, Detection Rate, and False Positive Rate.
Accuracy(AC): It is the percentage of the number of records that are correctly classified out of the total number of
records.
Accuracy = (TP+TN) / (TP+TN+FP+FN)
Detection Rate(DR): It is the percentage of the number of records that are classified correctly out of the total number
of anomaly records.
Detection Rate(DR) = TP / TP+FN
False Positive Rate(FPR): It is the percentage of the number of records that are incorrectly classified out of the total
number of normal records.
False Positive Rate(FPR)= FP / FP + TN
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com159

The Confusion matrix visualizes the performance of the GRU-IDS model as shown below.
Table 1. Confusion Matrix
VI. EXPERIMENTALRESULTS
The experimental results show that our proposed system GRU-IDS gives better accuracy on the test dataset
compared to various traditional machine learning classifiers as shown in Table 2. The GRU-IDS also gives more
accuracy rate compared to simple RNN and LSTM based techniques. From Table 3, we observe that our proposed
system’s accuracy varies with the number of hidden nodes present in the hidden layer of recurrent neural networks.
Table 2. Performance of the existing systems.
IDS SYSTEM Validation Accuracy Test Accuracy
SVM 99.55% 78.32%
KNN 99.42% 73.26%
NB 89.32% 75.62%
RF 99.73% 83.92%
ANN 99.49% 84.17%
RNN 97.53% 82.74%
LSTM 98.12% 85.42%
Table 3. Performance of our proposed system GRU-IDS.
Hidden Nodes Validation Accuracy Test Accuracy
40 95.15% 76.78%
80 99.42% 85.34%
120 99.13% 89.22%
160 96.18% 82.17%
200 97.35% 79.19%
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com160

VII. CONCLUSION AND FUTURE WORK
This model mainly focused on Intrusion detection with a high accuracy rate using RNN and feature selection
algorithm Random forest classifier. The experimental results shows an accuracy rate of 99.13%.on the training
dataset and 89.22% on the test data. This model outperforms all the other existing Intrusion Detection Systems. In
our future research, we would like to focus on decreasing the time complexity and increasing the accuracy rate in
detecting intrusions in a network system.
VIII. REFERENCES
[1]. Sharma S, Gupta RK. Intrusion detection system: A review. International Journal of Security and
its Applications.2015;9(5):69-76.
[2]. Allen J, Christie A, Fithen W, McHugh J, Picket J. State of the practice of intrusion detection technologies.
CARNEGIE-MELLON UNIV PITTSBURGH PA SOFTWARE ENGINEERING INST; 2000 Jan.
[3].Reddy RR, Ramadevi Y, Sunitha KN. Effective discriminant function for intrusion detection using SVM.in 2016
International Conference on Advances in Computing. Communications and informatics (ICACCI) 2016 Sep
21(pp.1148-1153). IEEE.
[4].Farnaaz N, Jabbar MA.Random forest modeling for network intrusion detection system. Procedia Computer
Science.2016 Jan 1;89(1):213-7.
[5].Selvakumar B, Muneeswaran K. Firefly algorithm based feature selection for network intrusion
detection.Computers & Security. 2019 Mar 1;81:148-55.
[6].Li W, Yi P, Wu Y, Pan L, Li J.A new intrusion detection system based on KNN classification algorithm in the
wireless sensor network. Journal of Electrical and Computer Engineering 2014;2014.
[7].Sahu S, Mehtre BM. Network intrusion detection system using J48 Detection Tree. In 2015 International
Conference on Advances in Computing, Communications, and Informatics (ICACCI) 2015 Aug 10(pp. 2023-2026).
IEEE.
[8].Revathi S, Malathi A. A detailed analysis of NSL-KDD dataset using various machine learning techniques for
intrusion detection. International Journal of Engineering Research & Technology (IJERT). 2013 Dec;2(12):1848-53.
[9]In GRE B, Yadav A. Performance analysis of NSL-KDD dataset using ANN. In 2015 international conference on
signal processing and communication engineering systems 2015 Jan 2(pp. 92-96).IEEE.
[10]. Shrivas AK, Dewangan AK. An ensemble model for classification of attacks with feature selection based on
KDD99 and NSL-KDD data set. International Journal of Computer Applications.2014;99(15):8-13.
[11]. Chae HS, Jo BO, Choi SH, Park TK. Feature selection for intrusion detection using NSL-KDD.Recent
advances in computer science.2013 Nov:184-7.
[12]. Yin C, Zhu Y, Fei J, He X. A deep learning approach for intrusion detection using recurrent neural networks.
Ieee Access.2017 Oct 12;5:21954-61.
[13]. Kasongo SM, Sun Y.A Deep Long Short-Term Memory based classifier for Wireless Intrusion Detection
System. ICT Express. 2019 Aug 22.
[14]. Kasongo SM, Sun Y.A deep learning method with a filter-based feature engineering for the wireless
intrusion detection system. IEEE Access. 2019 Mar 18;7:38597-607.
PAIDEUMA JOURNAL
Vol XIII Issue III 2020
Issn No : 0090-5674
http://www.paideumajournal.com161