invariance properties in deformable flexion-torsion loaded...
TRANSCRIPT

Invariance properties in deformable flexion-torsion loaded bodies spectra
Marc ROUFF�
and Michel COTSAFTIS��
Laboratoire de GenieElectrique de Paris - UPS - CNRS - ESEPlateau du Moulon, F-91192 GIF-SUR-YVETTE, Cedex, FRANCE
[email protected]�Laboratoire des Techniques Mecatronique etElectronique - ECE
53, rue de Grenelle, F-75007 PARIS, [email protected]
Keywords: control of flexion torsion loaded bodies, ro-bustness, Infinite dimensional systems, eigenfrequencies in-variance
Abstract
We present here in the framework of resonnant behaviors aneigenfrequency invariance properties for loaded flexural andtorsional deformable bodies. We found that under a preloadcondition each eigenfrequency is invariant versus the tipload��� . For the mode 7 and beyong the preload conditions areless than� ��� , and the seven first modes (form 0 to 6)can be easily modelled by polynomial functions of� � inthe neighbourhood of useful� � . To further improve thisresult, the role of passive system parameters has been stud-ied. We will show that compliant behaviors at mechanicaljoints create a new order on the system which leads to a largeinvariance property in the� � ��� � ��������� space. Compli-ant mechanical joint diminishes drastically the preload con-dition, as shows a lower threshold value for��� and a lowerinvariance mode number ( now typically 3 ) moreover the in-variance is more precise. These properties open the way tonew finite dimension controllers.
1 Introduction
The research of higher performances in speed and precisionfor industrial robotised mechnical systems has been leadingto lightweight mechanical structures [1, 3]. Such structurescannot be maintained as rigid bodies and deformations takeplace which considerably modify their behavior. As the sys-tem becomes now infinite dimensional, the control to be ap-plied for stabilizing its trajectory becomes itself infinite di-mensional, which fundamentally changes its nature. Firstsensing the modes and computing the corresponding controlrapidly reaches the limits of existing technology, and secondactuators themselves cannot deliver the required power in thehigh frequency range corresponding to these modes. Severalapproaches of control exist to manage and control infinite di-mensional structures [4], but they are fragilized by the notion
of trajectory [5], or by a non appropriate distrectized statespace approach [6]. It is very important to research a wayto approach differently the problem. In a first step, it is in-teresting to identify system properties allowing to determinein which cases, if any, the infinite dimensional deformablesystem reduces to a finite dimensional one controlled by afinite dimensional controller. Here specializing to the mostpenalizing case of initially rigid one link system, it is shownthat past a fixed order (typically 7) the modes are totally in-variant as a fonction of the applied tip load, and for lowerorder (��� ), are exhibiting a smooth behavior easily mod-elled by simple rational function of the load. Preliminaryanalysis of flexion deformation resonance modes of one linksystem was showing interesting invariance properties of res-onance frequencies versus applied tip load, allowing to con-struct finite dimensional controllers with arbitrary prescribedpreciseness. Moreover to further improve this result, the roleof passive system parameters has been studied. It is shownthat addition of compliance effect at link origin changes thestructure of equations as a consequence of modification ofpower distribution between resonants modes. In this enlargedsystem, non compliant mode structure appears to be singu-lar. The most significant results of this compliant approachare that there exits a threshold compliance value above whichall resonance frequencies are invariant versus the applied tipload. This new invariance has not the same behavior as in thenon compliant case, as shows a lower threshold value.
2 Prelininary results: the only flexion ap-proach
Let � be the Lagrangian of motion of linearized deformationequations of a one degree of freedom robotic arm [7, 10],
� ������ ����! � " �$# � %'&(*) &+ �-,/. � " �-0 +21 ,43�5 % 576 � 8�where+:9;+ � %=< 6>� is the first order flexible deformation func-tion in meter,
(the arm angular position in radian, and&+ or&( and +?1 are respectivelly the first time derivative of+ or(
and the second space derivative of+ , @ is the length of
flexible arm, and 0 and # areappropriatemechanicalcon-stants[11, 12]. Thestudyof resonantequilibriumstate,i.e.( �BADCE6-F with arbitraryinitial conditionson + � %G< 6>� , leadstothefollowing solution:+ � %G< 6>�H�JI �K% �4AMLNC � � 6>� � " �with I � % �O�QPRAMLNC8S �KTU% � )WV CEXZY=S �KT[% � ) A\AMLNC �KT[% � )5]CEX^Y �KT[% � and � P < V < A < 5_�a`!b c/d . Adding the associatedboundaryconditionsof theproblem,i.e. + �Ke�< 6>�f� +?g �he�< 6>�i�+21 �K@j< 6>�j� e and + ’’’ �h@k< 6>�l�Wmon+ �h@k< 6>� , for all 6p`oq e�<sr/t ,wherem is apunctualmassat % � @ , thefollowingequationof degenerationassociatedto systemeigenmodesis found:T[ui� ) ADLNC �hT[@ �4AMLNC8S �hT[@ �>�f�
. m � ,0 � AMLNC �hT[@ �vCDX^Y=S �KTw@ �G.pCEX^Y �KTw@ �4ADLNCxS �KTw@ �s��hy �with T � � # � ,8z 0{�s|s}>d . It canbe reducedto the followingnormalizedform,
� ) ADLNC � � �*�4AMLNC8S �~� �*�>�i�. � � � � � AMLNC �~� �*��CEX^Y=S � � �*��.pCEX^Y �~� �l��AMLNC8S � � �*�>� �K� �with � �o� Tw@ , � �o��m z � # @ 0{� , and # @ the weight offlexible arm. Thesmalldeformationassumptionusedto de-rive (3), i.e. that thecurvilinearabcissaalongdeformedarmC is equivalentto % [13], theabcissaalongrigid arm,leadstothefollowing condition, � ,�� ,�p� z y �Z� �
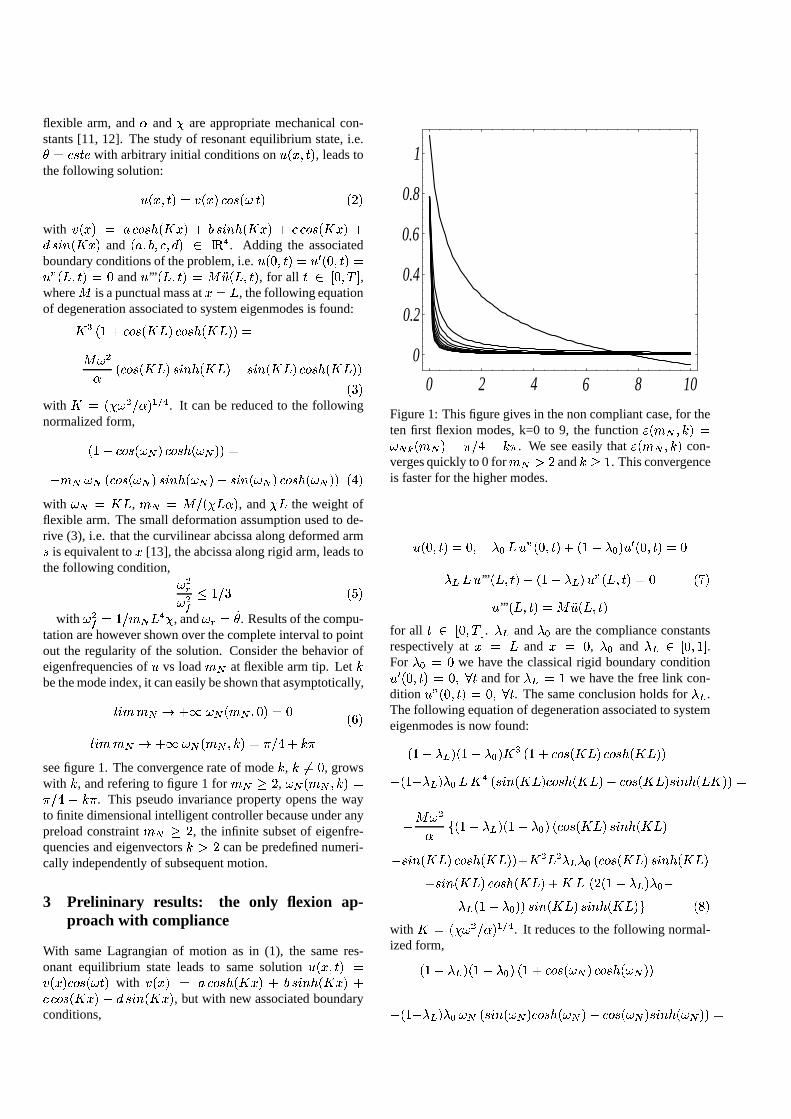
with � ,� �� z � � @ dD# , and � � � &( . Resultsof thecompu-tationarehowevershown over thecompleteinterval to pointout the regularity of the solution. Considerthe behavior ofeigenfrequenciesof + vs load ��� at flexible armtip. Let �bethemodeindex, it caneasilybeshown thatasymptotically,� X ��� �;� )�� � � � � � <�e �f� e �h� �� X �B� ��� )�� � � � � � <�� �i�;� z � ) � �seefigure1. Theconvergencerateof mode � , �p�� e , growswith � , andreferingto figure1 for � �a� " , � � � � � <�� �k�� z � ) � � . This pseudoinvariancepropertyopensthe wayto finite dimensionalintelligentcontrollerbecauseunderanypreloadconstraint� �� " , the infinite subsetof eigenfre-quenciesandeigenvectors�w� " canbepredefinednumeri-cally independentlyof subsequentmotion.
3 Prelininary results: the only flexion ap-proachwith compliance
With sameLagrangianof motion as in (1), the sameres-onant equilibrium state leadsto samesolution + � %G< 6>���I �K% �>AMLNC �~� 6>� with I � % ����PRAMLNC8S �KTU% � )�V CDX^Y=S �KT[% � )A\AMLNC �KT[% � ) 5]CEX^Y �KT[% � , but with new associatedboundaryconditions,
0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
Figure1: Thisfiguregivesin thenoncompliantcase,for theten first flexion modes,k=0 to 9, the function �4�K�������v�'�� �/ _� ���l�/¡�¢G£8¤¥¡J�_¢ . We seeeasily that ��� ���¦�§��� con-vergesquickly to 0 for ����¨O© and �:ªB« . Thisconvergenceis fasterfor thehighermodes.
¬ �h��s®>�{����°¯v±G² ¬?³ �h��s®>�?´��-«/¡µ¯v±8� ¬2¶ �Kv�>®>�i��¯v·*² ¬ ’’’ �h²k�>®>�¸´��-«/¡µ¯¹·¸� ¬2³ �K²j�>®>�i�J �Zº7�¬ ’’’ �h²k�s®>�i�;»o¼¬ �h²k�s®>�
for all ®¾½À¿ ��sÁ/ . ¯ · and ¯v± arethe complianceconstantsrespectively at ÃÀ�IJ and ÃÀ�Ä , ¯�± and ¯ · ½W¿ v�D«D .For ¯�±��� we have the classicalrigid boundarycondition¬ ¶ �K��s®>�Å�Wv�{Æ2® andfor ¯ · ��« we have the free link con-dition ¬?³ �Kv�>®>�/�Ç���Æ?® . Thesameconclusionholdsfor ¯ · .Thefollowing equationof degenerationassociatedto systemeigenmodesis now found:�-«/¡µ¯ · �D�-«k¡µ¯�±��-ÈwÉf�>«]´�ÊMËNÌÍ�KÈw²]�4ÊDËNÌxÎG�KÈw²]�s�´'�-«7¡j¯¹·\�>¯ ± ²ÏÈ[Ði�ZÌEÑ^Òi�KÈw²]�-ÊDËNÌxÎG�KÈw²]�=¡ÓÊDËNÌÔ�hÈ[²R�>ÌEÑ^Ò=Î=�h²HÈw�s�f�¡ » �HÕÖ × �>«/¡p¯ · �M�>«k¡µ¯�±��\�KÊDËNÌÔ�hÈ[²R��ÌEÑZÒ=ÎG�KÈw²]�
¡jÌEÑ^Òi�KÈw²]�4ÊDËNÌxÎG�KÈw²]�s�D´'È Õ ² Õ ¯ · ¯�±R�KÊMËNÌÍ�hÈ[²]�vÌDÑ^Ò=ÎG�KÈw²]�´*ÌEÑ^Òi�KÈw²]�4ÊDËNÌxÎG�KÈw²]�?´¾È�²Ø�^©��>«R¡¾¯ · �>¯v±Ô¡¯ · �-«k¡µ¯v±x�>�¹ÌEÑZÒi�hÈ[²R��ÌEÑZÒ=ÎG�KÈw²]�ÚÙ �KÛÍ�with ÈÜ��� Ý � Õ £ Ö �sÞsß Ð . It reducesto the following normal-izedform,�-«/¡µ¯ · �D�-«/¡µ¯�±��\�>«]´¾ÊMËNÌÍ� � �*�4ÊMËNÌ8Î=� � �*�>�´'�-«7¡j¯¹·\�>¯ ± � � �hÌEÑ^Òi� � � �-ÊDËNÌxÎG� � � ��¡ÓÊMËNÌÍ� � � �>ÌEÑ^Ò=Î=� � � �>�i�

00.2
0.40.6
0.81 0
2
4
6
8
10
12
3
4
00.2
0.40.6
0.81
Figure2: mode �¥�J
00.2
0.40.6
0.81 0
2
4
6
8
10
4
5
6
7
00.2
0.40.6
0.81
Figure3: We presentherefor themode à[áaâ figure2 andfor the mode à�áäã , figure 3, the curves å�æ/ç4è é�æ�ê�ë2ì , forè é�æ¦ê§ë¹ì�íWî âvêDãxâ�ï4ðñî â�êDãDï . Wecanseeeasilya largedomainof invariancewich is calledthecompliantbehavior.
00.2
0.40.6
0.81 0
2
4
6
8
10
14
15
16
00.2
0.40.6
0.81Figure4: mode ò¥óõô
00.2
0.40.6
0.81 0
2
4
6
8
10
17
18
19
00.2
0.40.6
0.81Figure5: We presentherefor themode öU÷�ø , figure4 and
for the mode öù÷oú , figure 5, the curves û{üþý�ÿ���ü�� ��� , forÿ���ü�� ����� � � � ������ � ��� � . Wecanseeeasilya largedomainof invariancewich is calledthecompliantbehavior.
2 4 6 8 100
2.5
5
7.5
10
12.5
15
17.5
20
Figure6: Thefirst 6 eigenmodesû{ü/ý , ö �� � ��ú � from downto up,versusthenormalizedload ��ü at
�=0, i.e. in thenon
compliantbehavior
2 4 6 8 100
2.5
5
7.5
10
12.5
15
17.5
20
Figure7: Thefirst 6 eigenmodesû{ü/ý , ö �� � ��ú � from downto up, versusthe normalizedload ��ü at
�=1, i.e. in the
compliantbehavior, we caneasilyseea very soonandverypreciseinvarianceeffect,evenfor themode ö¥÷ �

. ��� � ��� � k.µ� � � � /.µ� � � � AMLNC �~� � ��CEX^Y=S �~� � �Ú.CEXZY � � �l�4AMLNC8S � � �*�) � ,� � � � � � AMLNC �~� � ��CEX^Y=S �~� � � ) CDX^Y � � � ��AMLNC8S � � � �>� )� � � " � þ.p� � �>� � .µ� � � /.p� � �>��CEX^Y �~� � ��CEX^Y=S �~� � ��� ��� �with � � � T[@ , ��� � m z � # @ 0{� , and # @ the weightof flexible arm. For � � � � � 9 � , figures2 to 5 show� � � � � <§� � versus � � �����2�Ø` � q ev< e�t �;q e�< t � . Apartsmallareasof transitionthesesurfacesareveryflat, meaningthattherearetypically two mainsbehaviors; thenoncompli-ant behaviour closeto �ù� e , andthe compliantbehaviourfor � closeto . Thefrontier betweenthesetwo behavioursbecomesverysmallandtendsto �ñ� e as � increases.In thecompliantbehavior
� � � � � <§� �i� y � z � ) � � for � ���� z " � e �seefigures2 to 5. The convergencerateversus� � is in-creased,and the reductionof preloadconstraintto � �!�e�� � , shows anincreasingmoreefficient andmoreprecisein-varianceeffect in compliantcase,as shown by comparingfigure6 to figure7. We canalsonoticedthat the compliantbehavior canbereachfor � � � e�� y , i.e. for realistictechno-logical devices.
4 Preliminary results: The only flexion ap-proach in dissipative and non compliantcase
Let � betheLagrangianof motionof thelinearizedequationof deformationfor the systemdefinedFigure1 in the dissi-pativecase.
� ���¾�� �¾�� � " �$# � %'&(Å) &+ � , ) � " ��� � 6>�{. � " �>0 +?17, 5 % 5Ô6two casesof dissipationareconsideredhere,first theviscouscasethen � � 6>�*� ��!#"� &+ , 5�$ , secondlytheVoigt dissipation
casethen � � 6>�þ�%�&!'"� &+21 , 5($ . This leadsto thetwo normal-izeddifferentialequations) , +)+* , ) � � ) +)+* ) ) d +) % d ��. % ) , ()+* ,) , +)�* , ) �2� )-, +)+*�) % d ) ) d +) % d �Ø. % ) , ()+* ,involved respectivelly in the viscousand Voigt dissipation
cases,with* � 6 � � , � � � . /0 , � � � 12 / 0 and� � � � z � � . The study of the resonantequilibrium state
leadsto thefollowing solution, + � %G< 6>�/�BI � % ��AMLNC �~� � * � )3 � % ��CEX^Y �~� � * � with I � % �/�ØPRAMLNC8S �KTU% � )OV CEX^Y=S �hTU% � )A\AMLNC �KT[% � ) 5RCDX^Y �hTU% � , and 3 �K% � � 4P]ADLNCxS �KT[% � )
4V CEX^Y=S �KTU% � ) 4A\ADLNC �hTU% � ) 45þCEXZY �hTU% � . Addingto thebound-ary conditionsof theproblem,i.e. I �he �þ�;I g �Ke �]�BI 1 �K@ �]�e and I ’’’ �h@ �U� . � m z 0�� � ,� I �K@ � , and 3 �Ke �[� 3Åg �he �U�3j1 �h@ �k� e and 3 ’’’ �h@ �j��. � m z 0�� � ,� 3 �K@ � , we foundthefollowing equationsof degenerationassociatedto theeigen-modesof thesystem.��5 u . y6587 , � � � ) " AMLNC �s�95 ) 7 � @ �-ADLNCxS �>��5 . 7 � @ � )" AMLNC �s�95 . 7 � @ �-ADLNCxS �>��5 ) 7 � @ �>�{. �Ky:5 , 7 . 7�u �� " CEX^Y �>��5 ) 7 � @ �CEX^Y=S �s�95 . 7 � @ � ) " CEX^Y �>��7 . 5 � @ �>CEX^Y=S �s�95 ) 7 � @ �>�H�.jm � ,� � " AMLNC �>��5 ) 7 � @ �sCEXZY=S �>��5 . 7 � @ �. " CEX^Y �>��5 ) 7 � @ �>AMLNC8S �s�95 . 7 � @ � ) " ADLNC �s�95 . 7 � @ �CEX^Y=S �>�95 ) 7 � @ � ) " CEX^Y �>��7 . 5 � @ �AMLNC8S �s�95 ) 7 � @ �>� �Ky:5 , 7 . 7 u � �h� ) " AMLNC �>��5 ) 7 � @ �AMLNC8S �s�95 . 7 � @ � ) " ADLNC �s�95 . 7 � @ �>AMLNC8S �s�95 ) 7 � @ �s� )��5ju . y6587 ,E� � " CDX^Y �s�95 ) 7 � @ �>CEX^Y=S �s�95 . 7 � @ � )" CEX^Y �>�97 . 5 � @ �sCDX^Y=S �>��5 ) 7 � @ �>�i�.jm � ,� � " AMLNC �>��5 ) 7 � @ �sCEXZY=S �>��5 . 7 � @ �) " CEX^Y �>��5 ) 7 � @ �>AMLNC8S �s�95 . 7 � @ �M." AMLNC �s�95 . 7 � @ �>CEX^Y=S �>�95 ) 7 � @ �) " CDX^Y �s�97 . 5 � @ �-AMLNC8S �>�95 ) 7 � @ �>�with �95 ) &; 7 �$dw� � ,� ) &; �¹� � � for the first type of dis-sipation(viscouscase)andwith �95 ) &; 7 �-d¾� �~� ,� z � )� ,� � ,� �s� ) &; � � � � u� z � ) � ,� � ,� �>� for theVoigt dissipationcase. For the generallyusedmaterials, � � is very small,approximativelly e�< , . We have shown that for this kindof valuethedissipationdo not modify thepreviously shownbehaviours. Moreover we have alsoshown that in the caseof dissipative andcompliantmotion,theassociatedcomplexequationof degenerationwhichis left herefor reasonof con-ciseness,do not modify thepreviouslyshown behaviors.
5 The flexion-torsion equation of degenera-tion for loadedbodies
Applying LagrangianFormalismthe completeequationsofonelink deformablemechanicalsystem,is in the followingform,= 5¦�K% 5 , (5Ô6 , ) ) , + � 6 <>% �) 6 , �i��. ) ,) % ,+>@? ) , + � 6 <>% �) % , � 78�=
T , ) ,BA � 6 <>% �) 6 , � )) %DCFE ) A � 6 <>% �) % � " �� ) ,�G) 6 , � )) % >@? ) , + � 6 <>% �) % , HHHH I J � � y �
� � � ) ,�G) 6 , ) E � � % 5 , (5Ô6 , ) ) u + � 6 <>% �) 6 , ) % � HHHH IKJ � ��. >@? ) , + � 6 <s% �) % , HHHH IKJ �� � �
0 200 400 600 800 1000
0.06
0.08
0.1
0.12
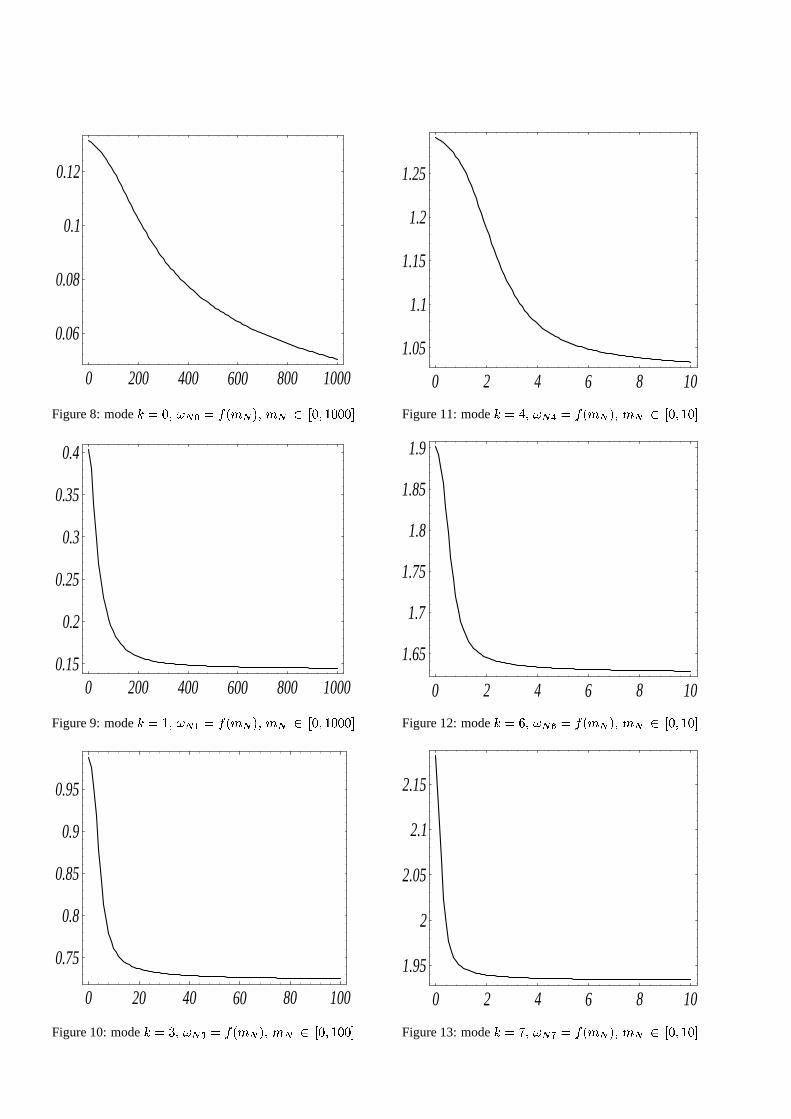
Figure8: mode � ���� � �R±Å�ML{� ���*�Ú����� ½Ç¿ ��E«E7Ô�Â
0 200 400 600 800 10000.15
0.2
0.25
0.3
0.35
0.4
Figure9: mode à á�ã7ê_å æON áMP{è é æ ìÚê�é æ íÇî â�êEãEâ7âÔâ�ï
0 20 40 60 80 100
0.75
0.8
0.85
0.9
0.95
Figure10: mode ò óMQ�R�S'TVUjó%W#X9YZT\[]R�Y^T`_a b�R c b:bed
0 2 4 6 8 10
1.05
1.1
1.15
1.2
1.25
Figure11: mode ö ÷;ø��_û{ügfÅ÷%h{ÿ9��ü � ����ü � � � � �e�
0 2 4 6 8 10
1.65
1.7
1.75
1.8
1.85
1.9
Figure12: mode ö ÷%i��_û üVj ÷%h{ÿ9� ü � ��� ü � � � � �e�
0 2 4 6 8 10
1.95
2
2.05
2.1
2.15
Figure13: mode ö ÷lk��_û{üVmj÷%h{ÿ9��ü � ����ü � � � � �e�

00.2
0.40.6
0.81 0
200
400
600
8001000
0.060.080.1
0.120.14
00.2
0.40.6
0.81
Figure14: mode ������ � �R± �L{� ��� �§¯�±��Ú�G� ��� n[¯v±8�l½¿ v�D«x77NÂonÓ¿ ��E«MÂ
00.2
0.40.6
0.81 0
100
200
300
400
0.2
0.3
0.4
00.2
0.40.6
0.81
Figure15: mode à�á�ã7ê_å{æONláP{è é�æ ê§ë�p�ìÚêGè é�æ�ð[ë�p8ìlíî âvêrqÍâ7â�ï¸ðpî â�êDãDï
00.2
0.40.6
0.81 0
20
40
60
80
0.5
0.6
0.7
00.2
0.40.6
0.81
Figure16: mode ò�óstR�S TVu óW#X�Y T R�v�we[]RxX�Y T y v�wz[\_a b�R|{:bed y a b�R�cBd
00.2
0.40.6
0.81 0
10
20
30
40
0.8
0.9
1
00.2
0.40.6
0.81
Figure17: mode ö�÷~}��_û�üV�¦÷ h{ÿ���ü@� ���e� �=ÿ9��ü �����e�\� � �>ø ������ � � � �
00.2
0.40.6
0.81 0
2
4
6
8
10
1.4
1.5
1.6
00.2
0.40.6
0.81
Figure18: mode ö�÷�út�_û�üV�¦÷ h{ÿ���ü@� ���e� �=ÿ9��ü �����e�\� � ��� ������ � � � �
00.2
0.40.6
0.81 0
1
2
3
4
5
1.7
1.8
1.9
00.2
0.40.6
0.81
Figure19: mode ö�÷~i��_û üVj ÷ h{ÿ�� ü � � � � �=ÿ9� ü ��� � �\� � ��ú ���� � ��� �

� � " ) ,�G) 6 , ) E " ) ,]A � 6 <>% �) 6 , HHHH I J � ��. CFE ) A � 6 <>% �) % HHHH I J � � � �with
(, + � 6 <>% � , A � 6 <>% � respectively the articularvariable,
and the deformation,flexion and torsion,variables,(� � , � " )
the coordinatesof the tip mass � with respectto the endof the link, @ is the length of the body, and the variousothercoefficientscharacterizingthebeamareasusualwithinEuler-Bernouilli approximation[2]. BoundaryConditionsaregivenby eqns(13,14,15),and,G � �K@ ) � � � (Å) � � ) + � 6 <>% �) % HHHH I J �) � " A � 6 <s% � HHHH IKJ �) + � 6 <>% � HHHH I J �� � �We want to study the resonantbehaviour of this non dissi-pative system,andwe posefor that, &( 9 e , we supposealsofor reasonsof simplicity that >@? and CFE do not dependon% . By assumingthat, $ù� % z @ , � � � � � z @ , � " � � " z @ ,4+ � + z @ , � ,� � >@? z = 5j@ d , � ," � CFE z = T , @ , , ������ � z � " , ����� T ,xz 5j@ , , � �B� � z = 5Å@ , E � �Ø� E � z = 5Å@ u ,E " ��� E " z = T , @ ,
* ��6 � � , we foundthefollowing normal-izedequationsof motion,) , 4+)+* , ) ) d�4+) $ d � e � � �) ,]A)+* , . � ��� �>, ) ,BA) $ , � e � K��with, for all
*,thefollowingnormalizedboundaryconditions,4+ �he�< * �H� eÅ� � � < 4+ g �Ke�< * � 9 ) 4+) $ HHHH � J �� eÅ� " e � < A �Kev< * �H� eÅ� " 8�4+ g g � < * � 9 ) , 4+) $ , HHHH � J | ��.j� � 4+ g g g � < * �{. E � � ) u 4+)+* , ) $ HHHH � J |� "Ô" �+ g g g � < * � 9 ) u 4+) $ u HHHH � J |� � �� ) , 4+)+* , ) � � ) u 4+) $ )+* , ) � " ) ,BA)�* ,+� � J |� " y �� ��� � , A g � < * � 9 � ��� � , ) A) $ HHHH � J |��. � � "� � � + g g g � < * ��. E " � ) ,]A)+* ,DHHHH � J |� " � �
In the caseof stationaryresonantbehaviours 4+ � $ < * � , so-lution of (17),canbewrittenas,4+ � $ < * �]��4+ | � $7�4ADLNC � � � * � � " � �with � ��� � z � � , where� is thefrequency variable,and,4+ | � $7�H��P]ADLNCxS �~� |s} ,� $Ô� )�V CEX^Y=S �~� |s} ,� $7�) A¸CEX^Y �~� |s} ,� $7� ) 5HADLNC � � |>} ,� $7� � " � �A � $ < * � , solutionof (8), canbewrittenas,A � $ < * �H� A | � $7�4ADLNC � � � * � � " � �
with, A | � $7�]���PRAMLNC �~� �� � $7� ) � V CEX^Y �~� �w� � $7� � " ��Introducing(25)and(27) into thesix boundaryconditionsoftheproblem,equations(19) to (24), leadsby theeliminationof AMLNC �~� � * � to a setof 6 linear equationsof the six initialvalues � P < V < A < 5 < �P < � V � . While this linear systemis degener-atedtheonly conditionof existenceof resonantmodeis thatthedeterminantof this linearsystemequalszero.This leadsto thefollowing equationof degeneration,
AMLNC � ��� � � ���=. " � d�� � . " E � � � � ����� � �) CEX^Y � � � � �*� � " E " � � , ) " � ," � ,� � ) " E � � E " � � � ���� �) AMLNC � � |>} ,� .µ��� � � �-ADLNCxS �~� |s} ,� ��\. � d�� � . E " �Å��� � |s|s} ,� ) E � �j��� ����� � . E � � E " � � | u } ,�
. E " �l�¹,� � | u } ,� . E � � � ," � | u } ,���� �) CDX^Y � � |>} ,� .j� � � �Å�sCDX^Y=S �~� |s} ,� � � � � � ,�� � ) � � ��� � ,�� �. E " � � � � |�|s} ,� ) E � � E " � � | u } ,� ) E " �*�¹,� � | u } ,� ) E � �*� ," � | u } ,�� � �) AMLNC �~� |s} ,� ) � � � �l�-AMLNC8S �~� |s} ,� � � . � d���� ) E " � � � � |s|s} ,�) E � � � � ������� ) E � � E " � � | u } ,� ) E " � � , � � | u } ,� ) E � �l� ," � | u } ,�� � �) CDX^Y � � |>} ,� ) � � � �Å�sCDX^Y=S �~� |s} ,� ��� � � � ,���� ) � � � � � ,����) E " �j��� � |�|s} ,� . E � � E " � � | u } ,� . E " � � , � � | u } ,� . E � �*� ," � | u } ,���� �) AMLNC �~� |s} ,� .j� � � �l�>CEX^Y=S � � |>} ,� ����. ��� ��� } ,�� � ) E � � � |s|s} ,�� �
) � , � � |�|>} ,�� � . E " ��� � � �� . E " �*� � � � � �� �) CDX^Y � � |>} ,� .j� � � ��>AMLNC8S � � |>} ,� ��� ��� ��� } ,���� . E " � � ,�. � ," � ,�� � ) E � � � |�|>} ,���� ) � , � � |�|>} ,���� ) E � � E " � � � � �� �
) AMLNC �~� |s} ,� ) � � � �l�>CEX^Y=S � � |>} ,� � � . � � � � } ,���� ) E � � � |s|s} ,����
) � , � � |s|s} ,�� � ) E " � � � � �� ) E " � � � ��� � �� �) CEXZY � � |>} ,� ) � � � �l�-AMLNC8S �~� |s} ,� ��� ��� ��� } ,���� ) E " � � ,�) � ," � ,�� � ) E � � � |s|s} ,���� ) � , � � |s|s} ,���� . E � � E " � � � � �� � � e� " � �This equationgives implicitly, for a given geometry, theeigenfrequency � � versusthe load � � , thuspermittingthestudyof theresonnantmodeversustheload.
6 The flexion-torsion invarianceproperties
Thestudyof (29) in thelimit of large � � givestwo interest-ing results.First thecaseof large � � leadsto theequation
� ��� � 5�� AÚ6��� � �� < , �t���� ¡¢ £ ) ,�¤ ¥ ¡ �t¦¡¢ £" E � � E " � � �� . " E " � � |s|s} ,� §¨ ) � �� �where � , � `Çb © , is themodeindex, for largevaluesof � �we have, � ���*� � ����Secondlythecase��� � e leadsfor large � � to the equa-tion,
� ��� � 5O� AÚ6����� �� , ��ª¡¢ £ ) ,«¤K¥ ¡ ��¬�¬ �� ¡¢�£ . ¢ ��¬®¬ �� ¡¢ £" ¯ " � � ,� ) " ¢ �t°¡¢K± . " E � � E " � � | u } ,� . " E " �*� ," � | u } ,� . " ¤ ¡ ¢ � ¬�² �� ¡¢ £ §¨ ) � ����i.e. for largevaluesof � � ,
� �B� � ����We foundthenthat � �a�´³ � � �*� hasa constantbehaviour(invarianceproperty)for largevaluesof � � , andthat eachmodeis separatedfrom hisneighbourby µ¦� ���;� z � � . Weseealsothat for largevaluesof � � this invariancepropertydo not dependson the geometryof the systembut only on��� . For a more preciseapproachof thesephenomenawehave computedusing(29) thecurves � � �¶³ � ��� � for theseveral oneof the eight first modesseefigure 8 to 13. Weseethat aspredictedtheoreticallyevery modeafter preloadconditionconvergesto a constantvalue(invariance).For themode � � e this modeconvergesto e for only � � � eÔe7eÔenot presentedin our figure. We seealsothat for � � � thepreloadconditionis lessthan � ���� , sotheinfinite subsetof the eigenfrequnecies� `�q �4< )�� t canbe representedbyprecalculatedconstantsopeningthewayto new finite dimen-sioncontrollers.Thesevenfirst mode� `Óq e�<���t canbeeasilymodelledby polynomialfunctionsof � � in theneighbour-hoodof theusefull ��� .
7 The flexion-torsion equation of degenera-tion in the compliant case
If we consideras in the preceedingsectionsthe dynamicalequationof a onelink deformablemechanicalsystem,withthe samenotationandwith the samenormalizedvariables,we foundthefollowing normalizedequationsof motion,) , 4+)+* , ) ) d�4+) $ d � e �Ky7e �) ,BA)�* , . � � � �>, ) ,]A) $ , � e �Ky 8�with, for all
*,thefollowingnormalizedboundaryconditions,4+ �Kev< * �H� e �Ky " � < A �Kev< * �H� e �Ky7y �
� � 4+ g g �Ke�< * � ) � k.µ� � �e4+ g �he�< * � 9 � � ) , 4+) $ , HHHH � J �) � /.µ� � � ) 4+) $ HHHH � J �� e�KyN� �4+ g g � < * � 9 ) , 4+) $ , HHHH � J |��.j� � 4+ g g g � < * �{. E � � ) u 4+)+* , ) $ HHHH � J |�KyÔ� �+ g g g � < * � 9 ) u 4+) $ u HHHH � J |� � � � ) , 4+)+* , ) � � ) u 4+) $ )+* , ) � " ) ,BA)�* ,�� � J |�Ky7� �� ��� � , A g � < * � 9 � ��� � , ) A) $ HHHH � J |��. � � "� � � + g g g � < * �{. E " � ) ,]A)+* , HHHH � J |�KyÍ� �
Equation(34) is the compliantboundarycondition that wesupposedto be appliedonly on $[� e , �v� is the compliantparameter, ��`�q e�< t , ��� e no compliance,��� fullcompliance.Inthe caseof stationaryresonnantbehaviors4+ � $ < * � , solutionof (30),canbewrittenas,4+ � $ < * �R�¶4+ | � $Ô�4AMLNC �~� � * � �Ky �Í�with � �B� � z � � , where� is thefrequency variable,and,4+ | � $Ô�H�JPRAMLNC8S �~� |s} ,� $7� )ùV CEX^Y=S � � |>} ,� $Ô�) A¸CEX^Y �~� |s} ,� $7� ) 5HADLNC � � |>} ,� $7� �Ky6� �A � $ < * � , solutionof (2), canbewrittenas,A � $ < * �H� A | � $Ô�4AMLNC �~� � * � � �Ôe �with, A | � $7�]���PRAMLNC �~� � ���·$7� )¸� V CEX^Y �~� � ���·$7� � � 8�

Introducing(38)and(40) into thesix boundaryconditionsoftheproblem,equations(32) to (37), leadsby theeliminationof AMLNC �~� � * � to a setof 6 linear equationsof the six intialvalues � P < V < A < 5 < �P < �V � . While this linear systemis degener-atedtheonly conditionof existanceof theresonnantmodeisdeterminantof this linear systemequalszero. This leadstothefollowing equationof degeneration,¹ | �~� �l���� � Ô.j���8� � d�»º .� ) � � � � � /. � �l�f. E � � � � � ,�·¼) ¹ , � � �*�� � º " � þ.µ� � � � d� º .� ) E � �j��� � ,� ¼. " ��� � ��%º E � � ) �v,� ¼K¼) ¹ u �~� �l���� � Ô.j���8� � d� º .�þ.µ� � � � � /. � �l�{. E � � � � � ,� ¼) ¹ d �~� �l���� ½ " � /.µ����� � � } ,� � � � ) E � � � � ) � � � �*�) " � � ��� } ,� º .�/.µ� � � � � ) ��� � ) E � �Å��� � ,� ¼�¾) ¹ , �~� �l���� � Ô.j���8� � d� º .� ) � � � � � /. � �l�{. E � � � � � ,� ¼) ¹ � �~� � � � 7.j� � � � ,�»º E " � ) � ," z � � . E " � � � � � � k. ��� �) E � � E " � � � � ,�·¼) ¹ � �~� � � º � /.p� � � � ,�Mº " E " � ) " � ," z � � . " E " � E � �Å��� � ,�·¼) � ��� � ��»º E � � E " � ) E " �*�v,� ) E � �*�v," z ��� ¼ ¼) ¹x¿ �~� �*� � k.µ���8� � ,�»º E " � ) �v," z ���) E " � � � � � � /. ��� � ) E � � E " �j��� � ,� ¼) ¹ � �~� �l� ½ � /.p�v��� � |�|>} ,� � . " E " � � �;. " E " � E � � � �. " E " �Å�¹,� � �J. " E � �l�v," z ��� � � ¼) " �v� � |s|s} ,� º E " � ) �v," z ��� ) E " �*� � � � � ) � �Å�. E � � E " �Å��� � ,�·¼K¼) ¹ | � �~� �*� � 7.j�v�x� � ,� º E " � ) �¹," z ���J. E " �*� � � � � /. � �l�) E " � E � �Å��� � ,�·¼) ¹ |s| �~� �*�� � ½ " � /.µ� � � ��� } ,� º . ��� ) E � � � � ) �¹,� � � ¼) " ��� � � } ,� º þ.¾� � � � � ) � �*��. E � � � � � ,�\¼ ¾) ¹ | , � � �*�� � º " � /.µ� � � � ,� � � � � ) ��� �s�{. � � � � ,� ��� ¼) ¹ | u �~� �*� ½ " � /.p�v��� � |�|>} ,� � E " � � �;. E " � E � � � �. E " �*�¹,� � �J. E � �l�¹," z ��� � � ¼) " �v� � |�|s} ,� º . E " �;.p�¹," z ��� ) E " ��� � � � � ) � �*�) E � � E " �Å��� � ,�·¼K¼
) ¹ |-d � � � � � �� � " � /.µ� � � � . E " � � � � ) ��� �>� ) � � � E " �Å��� �) ¹ | , � � �*���� � Ô.j���8� � d�%º ) � � � � � /. � �*� ) E � � � � � ,�8¼) ¹ | � � � � � � /.µ� � � � ,� º . E " � .µ�¹," z � � . E " � � � � � � j. ��� �. E " � E � � � � � ,� ¼ � e � � " �with ¹ | �~� �*�H�;AMLNC , � � |>} ,� �>AMLNC � � � � �*�¹ , �~� � �i��AMLNC �~� |s} ,� �-ADLNC � ��� � � �>AMLNC8S � � |>} ,� �¹ u �~� �Å�H�;AMLNC8S , �~� |s} ,� �>AMLNC � � � � �l�¹ d �~� � �i��AMLNC8S � � |>} ,� �>AMLNC � ��� � � �>CEX^Y �~� |s} ,� �¹ , � � �*�H�;CEX^Y , � � |>} ,� �-AMLNC � � � � �*�¹ � � � �*�H�JADLNC , �~� |s} ,� �sCDX^Y � � � � �*�¹ � �~� � �i��AMLNC �~� |s} ,� �>CEX^Y � ��� � � �>AMLNC8S � � |>} ,� �¹x¿ �~� �*�H�;AMLNC8Sv, �~� |s} ,� �>CEX^Y � � � � �*�¹ � � � �l�H�JAMLNC8S �~� |s} ,� �sCDX^Y � � � � �*�>CEX^Y �~� |s} ,� �¹ | � �~� � �i�BCDX^Y , � � |>} ,� �>CEX^Y � ��� � � �¹ |s| �~� �l�H�;AMLNC �~� |s} ,� �>AMLNC � � � � �Å�sCDX^Y=S �~� |s} ,� �¹ | , �~� � �i�BCDX^Y � � |>} ,� �>AMLNC � ��� � � �sCEXZY=S �~� |s} ,� �¹ | u �~� �*�i��AMLNC �~� |s} ,� �>CEX^Y � � � � �Å�sCEXZY=S �~� |s} ,� �¹ |-d � � �*�i��CEX^Y �~� |s} ,� �sCDX^Y � � � � �*�>CEX^Y=S � � |>} ,� �¹ | , �~� � �i��AMLNC � ��� � � �>CEX^Y=S , �~� |s} ,� �¹ | � �~� �l�i�BCEXZY � � � � �*�>CEX^Y=S¹, �~� |s} ,� �Equation(42) gives implicitly, for a given geometry, theeigenfrequencies� � versusthe load ��� , thus permittingthestudyof theresonantmodeversustheload.
8 The flesion-torsion invariance properties inthe compliant case
The studyof (42) in the compliantcase�v���À andin thelimit of large � � givestwo interestingresults.First thecaseof large � � leadsto theequation,
� |s} ,��� � 5O� 6�� � ��� � ) � �where � is themodeindex, when � ��� e ,
� |>} ,��� � � " ) � �when ��� � )��
, � |>} ,��� � � �Secondlywe seethat theseasymptoticbehaviors arediffer-ent as the non compliantcase. Here µ¦� � �À� , in place

of � z ��� and the analyticalapproachof (29) show that theequationof compliancearecompletelydifferentin its struc-tureasthenoncompliantcase.For a morepreciseapproachof thesephenomenawehavecomputedusing(42) thecurves� ���� � � � < �v�x� , where ��� is thecompliantvariable,forseveraloneof the eightfirst modesseefigure14 to 19. Weseeaspredictedtheoreticallythatin the �~� � < � � < �v�8� spacetherearemainly two behaviors,thenoncompliantonewhichis singularanddefinedfor �v� ��e�� y andthe compliantonewhich staysin the restof the spaceandleadsto a large in-variantbehaviour. In theframework of thecompliantbehav-ior we seeeasilyevenfor themode � � e thatthethresholdvalueof invarianceis drasticallyreducedandthattheinvari-anceis morepreciseandstablethanwithoutcompliance.Forexamplethethresholdconditionfor themode � � � is withcompliance��� � e�� � and ��� � "
without compliance.Wecanalsonoticedthatfor reasonof complexity of theprob-lem, in contraryof theonly flexion approachwherewe haveintroducecomplianceat the two limits of the arm, i.e. on% � e andon % � @ , in flexion-torsionapproachwe haveonly introducecomplianceat % � e , this explain at leastinpart,thelessefficienteffectof thecomplianceontheflexion-torsionapproachcomparedto theonly flexion approach.
9 Conclusion
Analysisof resonantsolutionsof onelink deformablesystemshowsthat,asa functionof theappliedtip load,theresonantfrequenciesaredistributedin equallyspacedlayerssplittedby adistance� � " z � � , where� " and� � arethecharacteristictorsionandflexion frequenciesof the system.Furthermore,the modesof order �� � are typically converging to thelayerboundary� � � " z � � for normalizedtip loadequalto 1,andhave for ����� a very smoothbehavior representablebysimplerationalfractionof tip load,allowing to easilypredictthe locationof resonancesfor well definedsystemparame-ters,andto determinethedomainsin which they areinvari-ant, a propertywhich will be usedfor the designof finitedimensioncontrol. Moreover analysisof complianceeffectondeformablesystemshowshighsensitivity of thesystemtothis parameterbecauseof modificationof powerdistributionoverresonantmodes.It is shown thatthereexistsa thresholdcompliancevalue � � � � e�� y � above which resonancefre-quenciesareinvariantversustip loadandareindependentofmodenumber. This thresholdvalueis easilytechnicallyre-alizableas it correspondsto a currentvalueof axial springstiffnessrepresentingthe compliance. A further improve-menthasbeenobservedwhenaddingcomplianceat link tip.Thisobservationwouldseemto opposeto commonideathathigherstiffnessis requiredwhenthe systembecomesmoredeformable.In fact existenceof compliancepower sink al-lows betterinternalregulationof powerdistribution over theresonantmodes,which will not have to betakencareoff byanoutercontroller.
References
[1] Book W.J., New conceptsin leightweightarms,Pro-ceedings of the second International Symposium onRobotics Research, Kyoto,Japan,pp.203-205,1984
[2] Clough R.W. andPenzienJ., Dynamicsof structures,Mac Graw Hill, New York, 1975.
[3] W.J. Book, S.L. Dickerson,G. Hastings,S. Cetikunt& T. Alberts,Combinedapproachesto lightweightarmutilization,Proceedings of the A.S.M.E., Winter annualmeeting, Miami, Floride,pp.97-107,1985.
[4] R. Teman,Infinite dimensionaldynamicalsystemsinmechanicsandphysics,AppliedMath.Sciences,nÀ 89,SpringerVerlag,New-York, 1988.
[5] A. DeLuca& B. Siciliano,Trajectorycontrolof anon-linear one link flexible arm, International Journal ofControl, 50, (5), pp.1699-1715,1989.
[6] Y. Sakawa,F. Matsuno,& S.Fukushima,ModelingandFeedbackControl of a Flexible Arm, J. Robotic Syst.,2, (4), pp.453,1985.
[7] M. Moallem, K. Khorasani, & R.V. Patel, Integralmanifold approachfor tip-position tracking of flex-ible multi-link manipulators,IEEE Transactions onRobotics and Automation, 13, (6), pp.823-836,1997.
[8] V. Feliu,K. S.Rattan,& H.B. Brown, Controlof flexi-ble armswith friction in the joints, IEEE Transactionson Robotics and Automation, 9, (4), pp.467-475,1993.
[9] A. DeLuca,& B. Siciliano,Regulationof flexible armsundergravity, IEEE Transactions on Robotics and Au-tomation, 9, (4), pp.463-467,1993.
[10] B. V. Chapnik,G.R.Heppler, & J.D.Aplevich,Control-ling the impactresponseof a onelink flexible roboticarm, IEEE Transactions on Robotics and Automation,9, (3), pp.346-351,1993.
[11] K. H. Low, M. Vidyasagar:A LagrangianFormulationof the Dynamic Model for Flexible ManipulatorSys-tems,J. of Dyn. Syst. Meas. and Control, 110, pp.175-181,1988.
[12] B. Tabarrov, C. M. Leech,Y. I. Kim: On theDynamicsof Axially Moving Beams,J. of Franklin Institute, 297,(3), pp.201,1974.
[13] A. M. Bloch, The Dynamicsof a FreeFlexible Body,in Analysis and Control of Nonlinear Systems,C.I.Byrnes,C.F. Martin,R.E.Seaks,Eds.,Elsevier SciencePub., North Holland,Amsterdam,1988.