itb - neuro.bio.lmu.de · itb humboldt-universit at zu berlin inno v a tionsk olleg theoretische...
TRANSCRIPT

ITBHUMBOLDT-UNIVERSIT�AT ZU BERLININNOVATIONSKOLLEG THEORETISCHE BIOLOGIESkript zur VorlesungMathematik f�ur Biologen
Mit au�ergew�ohnli hem Engagement haben Arndt Tels how, Dr. Raphael Ritz undJan Benda dur h kritis he Anmerkungen und Neuentw�urfe zu diesem Skript beige-tragen.Wi htige konstruktive Kritik und Kommentare kamen au h von Prof. Dr. Hans-peter Herzel, den Tutoren am Innovationskolleg Theoretis he Biologie und vielenStudenten, die an der Vorlesung Mathematik f�ur Biologen in den letzten beidenJahren teilgenommen haben. Unsere Sekret�arin, Frau Karin Winklh�ofer, fand ni htnur Tippfehler in fr�uheren Versionen dieses Skripts und Thomas F�orster erstelltedie meisten der Abbildungen.Ihnen allen herzli hen Dank!�Uber weitere Anregungen inhaltli her und gestalteris her Art sowie Hinweise zu densi her no h ni ht restlos aufgede kten Fehlern w�urde i h mi h sehr freuen.Prof. Dr. Andreas V.M. Herz Tel: 030-2093-9112Institut f�ur Biologie Fax: 030-2093-8801Humboldt-Universit�at zu Berlin e-mail: itb�biologie.hu-berlin.deInvalidenstra�e 43, 10115 Berlin http://itb.biologie.hu-berlin.de

Wozu Mathematik in der Biologie?Gejubelt haben wohl nur wenige, als sie Mathematik im P i htprogramm des Bio-logiestudiums entde kten. Endli h fertig mit der S hule, endli h fertig mit der Ma-thematik und nun das. Wozu �uberhaupt Mathematik, wenn man do h Biologiestudieren m�o hte?Zum Erbsenz�ahlen a la Gregor Mendel (1822-1884, Naturfors her, M�on h und stu-dierter Mathematiker) gen�ugen die in der Grunds hule erworbenen Re henf�ahigkei-ten. Aber s hon bei der statistis hen Analyse seiner Messungen ger�at man ras h andie Grenzen von erst in der Oberstufe behandelten mathematis hen Methoden.Warum aber �uberhaupt Statistik? Wir wollen diese Frage hier ni ht im Detail be-antworten, uns jedo h kurz mit den Grundideen der Statistik vertraut ma hen. Inder Statistik werden Daten von experimentellen Messungen oder Beoba htungenanalysiert. Sol h ein Datensatz kann aus S hnabell�angen von V�ogeln, Ges hle hter-verh�altnissen bei Ameisen oder den bekannten Mendels hen Erbsen bestehen. Ausdiesem Datensatz versu ht man Gesetzm�a�igkeiten abzulesen. Dazu stellt man eineHypothese auf. Die Statistik gibt dann Auskunft dar�uber, ob die gemessenen Datenmit der Hypothese vertr�agli h sind oder ni ht. So sind au h die Mendels hen Ge-setze zuerst als Hypothese formuliert und ans hliessend dur h statistis he Analysenbest�atigt worden.Ein Grundproblem jeder statistis hen Analyse besteht darin, dass gemessene Datenimmer mehr oder weniger zuf�allig sind. Deshalb kann es passieren, dass bestimmteDatens�atze vollkommen fals he Gesetzm�a�igkeiten suggerieren. In der Statistik wirdder Begri� Zufall nun mathematisiert. Man re hnet mit Wahrs heinli hkeiten. AlsErgebnis einer statistis hen Analyse erh�alt man beispielsweise, dass ein Datensatzdie Mendels hen Gesetze mit einer Wahrs heinli hkeit von 99% best�atigt.Erst die Statistik bef�ahigt uns, derartig konkrete Aussagen zu tre�en und damitau h quantitativ abzus h�atzen, wie wirksam beispielsweise ein Medikament ist, obsi h die Erde aufgrund des Ein usses von Treibhausgasen erw�armt, oder ob in derN�ahe von Kernkraftwerken Leuk�amieerkrankungen mit signi�kanter H�aufung auf-treten . . .Mathematik in der Biologie bedeutet jedo h mehr als \nur" Statistik. Ein Grunddaf�ur besteht darin, dass viele biologis he Prozesse ni ht mehr intuitiv verst�and-li h sind. Bei der Bes hreibung eines biologis hen Prozesses kommt man deshalboft gar ni ht umhin, ein mathematis hes Modell aufzustellen. Erst dadur h ist einVerst�andnis des Prozesses und damit au h eine Vorhersage �uber seine zuk�unftigeEntwi klung m�ogli h. Und erst dies erm�ogli ht es, Prozesse in der Biote hnologieoder der Medizin kontrolliert ablaufen zu lassen. Mit einem mathematis hen Mo-dell kann man au h simulieren, wel he Auswirkungen Eingri�e in die Natur haben.Es ist deshalb ni ht verwunderli h, dass die Mathematik ein wi htiges Hilfsmittelder modernen Biowissens haften geworden ist, von der Biote hnologie bis hin zurna hhaltigen Bewirts haftung biologis her Ressour en.S hlie�li h erlaubt die mathematis he Modellierung formal�aquivalente Bes hreibun-gen von auf den ersten Bli k h�o hst unters hiedli hen Ph�anomenen. So sind auf ma-thematis her Ebene viele Aspekte der Dynamik von Bakterienpopulationen, bio he-mis hen Reaktionen und neuronalen Systemen nahezu identis h. Die mathematis heAbstraktion erm�ogli ht hier einen sonst ni ht denkbaren Transfer von theoretis henResultaten �uber die Grenzen einzelner biologis her Fa hgebiete hinweg. Die Mathe-II

matik hat deshalb eine wi htige Br�u kenfunktion sowohl zwis hen experimentellenund theoretis hen Ans�atzen, als au h zwis hen vers hiedenen biologis hen Einzel-disziplinen.In der Vorlesung \Mathematik f�ur Biologen" wollen wir Ihnen aus den genann-ten Gr�unden die wi htigsten mathematis hen Konzepte und Begri�e nahebringen.Wo es si h anbietet, werden wir biologis he Anwendungen diskutieren. ErwartenSie aber ni ht zu viel: Es w�are ni ht sinnvoll, jede De�nition, jede Re henregel, je-den Lehrsatz mit einem mehr oder weniger aufgezwungenen Beispiel zu garnieren.Vielmehr haben wir versu ht, ausgesu hte Beispiele, die f�ur Ihr weiteres Biologie-studium relevant sind, im Detail zu bespre hen. Falls Sie trotzdem an der einenoder anderen Stelle gerne weitere Beispiele sehen w�urden, oder falls sie anderweitigVerbesserungsvors hl�age haben, dann lassen Sie uns dies bitte wissen: der n�a hsteJahrgang wird es Ihnen mit Si herheit danken!
III

Empfohlene Lehrb�u herEinf�uhrende WerkeKlaus Fritzs he:Mathematik f�ur Einsteiger.Spektrum Akademis her VerlagArnfried Kemnitz:Mathematik zum Studienbeginn.ViewegChristian B. Lang & NorbertPu ker:Mathematis he Methoden in derPhysik.Spektrum Akademis her VerlagLothar Papula:Mathematis he Formelsammlung.Viewegs Fa hb�u her der Te hnik
Adolf Riede�: (20644)Mathematik f�ur Biologen.ViewegWolfgang S h�afer, Kurt Georgi & GiselaTrippler:Mathematik{Vorkurs.Teubner Studienb�u herWerner Timis hl�: (WC 7000 T 583(2) LS)Biomathematik { Eine Einf�uhrung f�ur Bio-logen und Mediziner.Springer-VerlagHerbert Vogt�: (19837)Grundkurs Mathematik f�ur Biologen.Teubner Studienb�u herWeiterf�uhrende WerkeLeah Edelstein-Keshet:Mathemati al Models in Biology.Birkh�auser-VerlagHelmut Fis her & Helmut Kaul:Mathematik f�ur Physiker.Teubner-VerlagKarl Peter Hadeler:Mathematik f�ur Biologen.Springer-VerlagRobert M. May:Stability and Complexity inModel E osystems.Prin eton University PressJames D. Murray�: (18851)Mathemati al Biology.Springer-Verlag
Lee A. Segel:Modeling dynami phenomena inmole ular and ellular biology.Cambridge University PressWerner Timis hl�: (19510)Biostatistik {Eine Einf�uhrung f�ur Biologen.Springer-VerlagEdward K. Yeagers, Ronald W. Shonkwiler& James V. Herod:An Introdu tion to the Mathemati s of Bio-logy (with Computare Algebra Models).Birkh�auser-Verlag
� Bu h ist unter der angegebenen Nummer in der Biologie-Bibliothek vorhanden.IV

Inhaltsverzei hnis1 Grundlagen 11.1 Nat�urli he, ganze und rationale Zahlen . . . . . . . . . . . . . . . . . 11.2 Unglei hungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Rationale und reelle Zahlen . . . . . . . . . . . . . . . . . . . . . . . 31.3.1 Rationale Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . 31.3.2 Reelle Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.3 Intervalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Betrag einer reellen Zahl . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Summen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5.1 Eine Anwendung: Die geometris he Reihe . . . . . . . . . . . 91.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112 Funktionen und ihre graphis he Darstellung 132.1 Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Komposition von Funktionen . . . . . . . . . . . . . . . . . . . . . . 182.2.1 Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.2 Stre kung und Stau hung . . . . . . . . . . . . . . . . . . . . 192.2.3 Spiegelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.4 Allgemeine Kompositionen . . . . . . . . . . . . . . . . . . . 222.3 Einfa he spezielle Funktionen . . . . . . . . . . . . . . . . . . . . . . 222.3.1 Lineare Funktionen . . . . . . . . . . . . . . . . . . . . . . . . 222.3.2 Quadratis he Funktionen . . . . . . . . . . . . . . . . . . . . 232.4 Quadratis he Glei hungen . . . . . . . . . . . . . . . . . . . . . . . . 242.5 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26V

3 Potenzen und verwandte Funktionen 293.1 Einfa he Potenzen und Wurzeln . . . . . . . . . . . . . . . . . . . . . 303.1.1 Potenzen nat�urli her Zahlen . . . . . . . . . . . . . . . . . . . 303.1.2 Potenzfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . 303.1.3 Wurzelfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Polynome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.3 Potenzen mit beliebigen reellen Exponenten . . . . . . . . . . . . . . 323.3.1 Mathematik und Biologie: Skalengesetze . . . . . . . . . . . . 343.4 Exponentialfunktion und Logarithmus . . . . . . . . . . . . . . . . . 353.4.1 Exponentialfunktion . . . . . . . . . . . . . . . . . . . . . . . 353.4.2 Logarithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.4.3 Umre hnung zwis hen vers hiedenen Basen . . . . . . . . . . 383.4.4 Mathematik und Biologie: Exponentieller Zerfall . . . . . . . 393.5 Der Binomis he Satz . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.5.1 Anwendungen des binomis hen Satzes . . . . . . . . . . . . . 433.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454 Folgen 494.1 Einf�uhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2 Monotonie und Bes hr�anktheit . . . . . . . . . . . . . . . . . . . . . 524.3 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545 Grenzwerte 575.1 Konvergenz und Divergenz . . . . . . . . . . . . . . . . . . . . . . . . 585.2 Eigens haften von Grenzwerten . . . . . . . . . . . . . . . . . . . . . 605.3 Monotone Konvergenz . . . . . . . . . . . . . . . . . . . . . . . . . . 625.4 Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.5 Divergenz gegen Unendli h . . . . . . . . . . . . . . . . . . . . . . . 665.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 686 Iterierte Abbildungen 696.1 Lineare Iterierte Abbildungen 1. Ordnung . . . . . . . . . . . . . . . 736.1.1 Homogene Iterierte Abbildungen 1. Ordnung . . . . . . . . . 73VI

6.1.2 Inhomogene Iterierte Abbildungen 1. Ordnung . . . . . . . . 756.2 Mathematik und Biologie: Populationsmodelle . . . . . . . . . . . . . 786.2.1 Zellpopulation mit exponentiellem Wa hstum . . . . . . . . . 786.2.2 Holzs hlag im Wald I . . . . . . . . . . . . . . . . . . . . . . 796.2.3 Holzs hlag im Wald II . . . . . . . . . . . . . . . . . . . . . . 806.2.4 No hmals: Das Populationsmodell von Fibona i . . . . . . . 816.3 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 827 Ni htlineare Iterierte Abbildungen 857.1 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 908 Grenzwerte von Funktionen und Stetigkeit 918.1 Grenzwerte reeller Funktionen . . . . . . . . . . . . . . . . . . . . . . 918.1.1 De�nitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 918.1.2 Re henregeln . . . . . . . . . . . . . . . . . . . . . . . . . . . 948.1.3 Grenzwert von f(x) f�ur x gegen 1 und �1 . . . . . . . . . . 958.2 Stetigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 968.2.1 S�atze �uber stetige Funktionen . . . . . . . . . . . . . . . . . . 978.3 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1019 Di�erentiation 1039.1 De�nition und geometris he Interpretation . . . . . . . . . . . . . . . 1049.1.1 Geometris he Interpretation und Tangentenglei hung . . . . . 1069.1.2 Zusammenhang von Stetigkeit und Di�erenzierbarkeit . . . . 1089.2 Ableitungsregeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1099.2.1 Summen-, Produkt- und Quotientenregel . . . . . . . . . . . 1099.2.2 Ableitung von Funktion und Umkehrfunktion . . . . . . . . . 1119.2.3 Kettenregel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1129.3 Exponential- und Logarithmusfunktion . . . . . . . . . . . . . . . . . 1149.3.1 Ableitung der Exponentialfunktion . . . . . . . . . . . . . . . 1149.3.2 Potenzreihenentwi klung der Exponentialfunktion . . . . . . 1169.3.3 Ableitung der Logarithmusfunktion . . . . . . . . . . . . . . . 1179.4 H�ohere Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 117VII

9.5 Taylor-Entwi klung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1189.6 Kurvendiskussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1219.6.1 Ein Beispiel zur Kurvendiskussion: f(x) = (1 + x)p1� x2 . . 1249.7 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12510 Trigonometris he Funktionen 13110.1 Winkelmessung und ebene Dreie ke . . . . . . . . . . . . . . . . . . . 13110.2 Sinus und Cosinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13410.2.1 N�aherungsformeln f�ur kleine Winkel . . . . . . . . . . . . . . 13510.2.2 Sinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13510.2.3 Cosinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13610.2.4 Werte von Sinus und Cosinus f�ur spezielle Argumente . . . . 13710.2.5 Additionstheoreme . . . . . . . . . . . . . . . . . . . . . . . . 13810.2.6 Ableitung von Sinus und Cosinus . . . . . . . . . . . . . . . . 13910.2.7 Taylorentwi klung der Sinus- und Cosinus-Funktion . . . . . 14110.3 Tangens und Cotangens . . . . . . . . . . . . . . . . . . . . . . . . . 14210.4 Umkehrfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14310.4.1 Ar ussinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14310.4.2 Ar us osinus . . . . . . . . . . . . . . . . . . . . . . . . . . . 14410.4.3 Ar ustangens und Ar us otangens . . . . . . . . . . . . . . . 14510.5 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14511 Komplexe Zahlen 14911.1 De�nition der Imagin�aren Einheit . . . . . . . . . . . . . . . . . . . . 14911.2 Arithmetis he Darstellung und Gau�s heZahlenebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15011.3 Addition und Subtraktion . . . . . . . . . . . . . . . . . . . . . . . . 15111.4 Polarkoordinatendarstellung . . . . . . . . . . . . . . . . . . . . . . . 15211.5 Multiplikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15311.6 Division . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15511.6.1 Taylorentwi klung der komplexen Exponentialfunktion . . . . 15611.7 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158VIII

12 Integralre hnung 16112.1 Einf�uhrung und De�nition . . . . . . . . . . . . . . . . . . . . . . . . 16112.2 Eigens haften des bestimmten Integrals . . . . . . . . . . . . . . . . 16312.3 Integration und Di�erentiation . . . . . . . . . . . . . . . . . . . . . 16412.4 Integrale spezieller Funktionen . . . . . . . . . . . . . . . . . . . . . 16712.5 Re henbeispiele zur Integration . . . . . . . . . . . . . . . . . . . . . 16812.6 Uneigentli he Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . 16912.7 Partielle Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . 17012.8 Substitution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17112.9 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17313 Di�erentialglei hungen 17513.1 Qualitative Analyse von Di�erentialglei hungen . . . . . . . . . . . . 17813.2 L�osung dur h Separation der Variablen . . . . . . . . . . . . . . . . . 18313.3 Weitere Di�erentialglei hungstypen . . . . . . . . . . . . . . . . . . . 18513.3.1 Gekoppelte Di�erentialglei hungen . . . . . . . . . . . . . . . 18513.3.2 Di�erentialglei hungen h�oherer Ordnung . . . . . . . . . . . . 18613.3.3 Partielle Di�erentialglei hungen . . . . . . . . . . . . . . . . . 18713.4 Ausbli k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18813.4.1 Eindeutigkeit von L�osungen . . . . . . . . . . . . . . . . . . . 18813.4.2 Fortsetzbarkeit von L�osungen . . . . . . . . . . . . . . . . . . 18813.4.3 Numeris he Integration von Di�erentialglei hungen . . . . . . 18913.5 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19014 Lineare Di�erentialglei hungen 19314.1 Homogene Glei hungen: Separation der Variablen . . . . . . . . . . . 19614.2 Inhomogene Glei hungen: Variation der Konstanten . . . . . . . . . 19714.3 L�osung homogener und inhomogener Glei hungen . . . . . . . . . . . 20014.4 Exponentialansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20214.5 Lineare Stabilit�atsanalyse . . . . . . . . . . . . . . . . . . . . . . . . 20614.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20715 Lineare Glei hungen 209IX

15.1 Lineare Glei hungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 21115.1.1 Homogene und Inhomogene Glei hungssysteme . . . . . . . . 21315.1.2 L�osung f�ur ein System mit zwei Glei hungen . . . . . . . . . 21415.2 Gau�s hes Eliminationsverfahren . . . . . . . . . . . . . . . . . . . . 21515.3 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21816 Matrizen 22116.1 Quadratis he Matrizen . . . . . . . . . . . . . . . . . . . . . . . . . . 22316.2 Re henregeln f�ur Matrizen . . . . . . . . . . . . . . . . . . . . . . . . 22516.2.1 Addition und Subtraktion . . . . . . . . . . . . . . . . . . . . 22516.2.2 Multiplikation einer Matrix mit einem Skalar . . . . . . . . . 22616.2.3 Multiplikation eines Vektors mit einer Matrix . . . . . . . . . 22716.2.4 Ein Spezialfall: Das Skalarprodukt zweier Vektoren . . . . . . 22816.2.5 Geometris he Interpretation der Multiplikation eines Vektorsmit einer Matrix . . . . . . . . . . . . . . . . . . . . . . . . . 22916.2.6 Multiplikation zweier Matrizen . . . . . . . . . . . . . . . . . 23216.2.7 Re henregeln der Matrizenmultiplikation . . . . . . . . . . . . 23616.3 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23717 Determinanten 24117.1 Determinanten: Eigens haften, Re henregeln . . . . . . . . . . . . . . 24517.2 Matrixinversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24617.3 Cramers he Regel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24717.4 Eigenwertproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24917.5 Reellwertige, symmetris he Matrizen . . . . . . . . . . . . . . . . . . 25117.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25318 Funktionen mehrerer Variabler 25718.1 Einf�uhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25718.1.1 Beispiele f�ur Funktionen mehrerer Variabler . . . . . . . . . . 25718.1.2 Visualisierung von Funktionen mehrerer Variabler . . . . . . 25818.1.3 Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25918.1.4 Wi htige Teilmengen des Rn . . . . . . . . . . . . . . . . . . 260X

18.1.5 S hlussbemerkung . . . . . . . . . . . . . . . . . . . . . . . . 26118.2 Folgen, Grenzwert und Stetigkeit . . . . . . . . . . . . . . . . . . . . 26118.3 Partielle Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 26318.4 Potenzreihen und Taylorentwi klung im Rn . . . . . . . . . . . . . . 26618.5 Totales Di�erential und Ri htungsableitung . . . . . . . . . . . . . . 26918.6 Lokale Extrema in D = 2 Dimensionen . . . . . . . . . . . . . . . . . 27118.6.1 Diskussion des Satzes (18.37) . . . . . . . . . . . . . . . . . . 27218.7 Ausbli k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27418.8 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275A L�osungen der Aufgaben 279A.1 Aufgaben zu Kapitel 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 279A.2 Aufgaben zu Kapitel 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 284A.3 Aufgaben zu Kapitel 3 . . . . . . . . . . . . . . . . . . . . . . . . . . 293A.4 Aufgaben zu Kapitel 4 . . . . . . . . . . . . . . . . . . . . . . . . . . 304A.5 Aufgaben zu Kapitel 5 . . . . . . . . . . . . . . . . . . . . . . . . . . 307A.6 Aufgaben zu Kapitel 6 . . . . . . . . . . . . . . . . . . . . . . . . . . 311A.7 Aufgaben zu Kapitel 7 . . . . . . . . . . . . . . . . . . . . . . . . . . 319A.8 Aufgaben zu Kapitel 8 . . . . . . . . . . . . . . . . . . . . . . . . . . 321A.9 Aufgaben zu Kapitel 9 . . . . . . . . . . . . . . . . . . . . . . . . . . 324A.10 Aufgaben zu Kapitel 10 . . . . . . . . . . . . . . . . . . . . . . . . . 340A.11 Aufgaben zu Kapitel 11 . . . . . . . . . . . . . . . . . . . . . . . . . 348A.12 Aufgaben zu Kapitel 12 . . . . . . . . . . . . . . . . . . . . . . . . . 356A.13 Aufgaben zu Kapitel 13 . . . . . . . . . . . . . . . . . . . . . . . . . 367A.14 Aufgaben zu Kapitel 14 . . . . . . . . . . . . . . . . . . . . . . . . . 372A.15 Aufgaben zu Kapitel 15 . . . . . . . . . . . . . . . . . . . . . . . . . 373A.16 Aufgaben zu Kapitel 16 . . . . . . . . . . . . . . . . . . . . . . . . . 379A.17 Aufgaben zu Kapitel 17 . . . . . . . . . . . . . . . . . . . . . . . . . 391A.18 Aufgaben zu Kapitel 18 . . . . . . . . . . . . . . . . . . . . . . . . . 399XI

XII
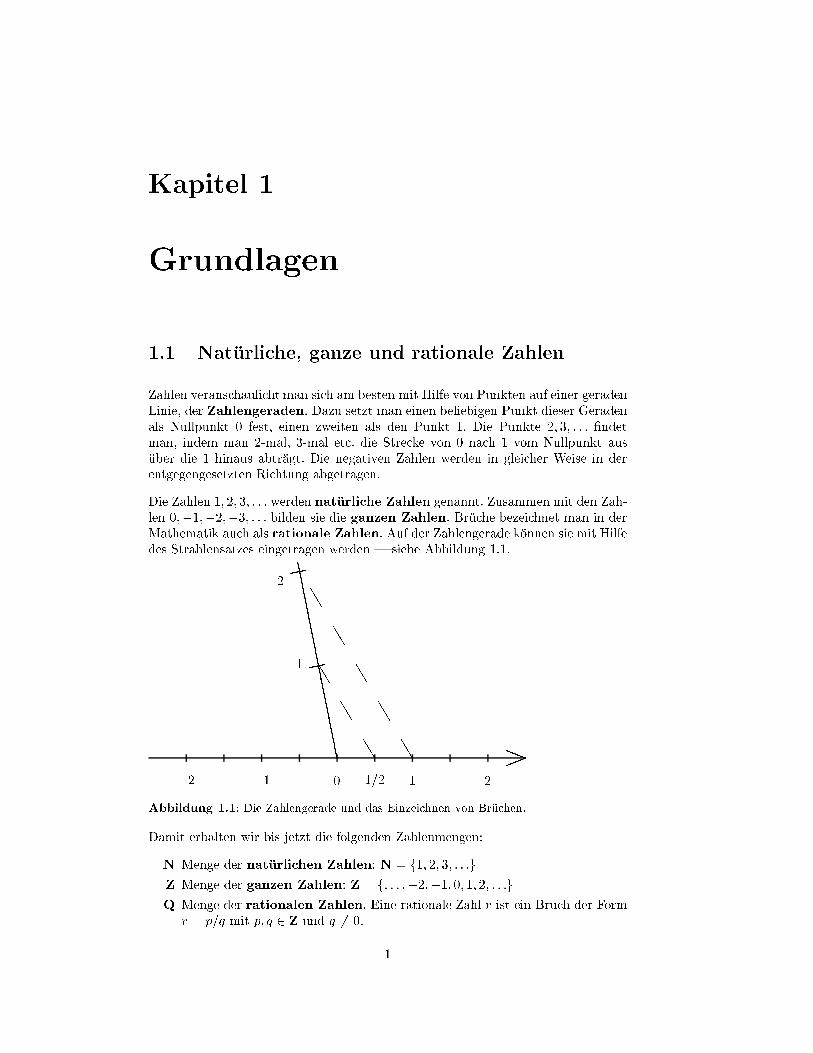
Kapitel 1Grundlagen1.1 Nat�urli he, ganze und rationale ZahlenZahlen verans hauli ht man si h am besten mit Hilfe von Punkten auf einer geradenLinie, der Zahlengeraden. Dazu setzt man einen beliebigen Punkt dieser Geradenals Nullpunkt 0 fest, einen zweiten als den Punkt 1. Die Punkte 2; 3; : : : �ndetman, indem man 2-mal, 3-mal et . die Stre ke von 0 na h 1 vom Nullpunkt aus�uber die 1 hinaus abtr�agt. Die negativen Zahlen werden in glei her Weise in derentgegengesetzten Ri htung abgetragen.Die Zahlen 1; 2; 3; : : : werden nat�urli he Zahlen genannt. Zusammen mit den Zah-len 0;�1;�2;�3; : : : bilden sie die ganzen Zahlen. Br�u he bezei hnet man in derMathematik au h als rationale Zahlen. Auf der Zahlengerade k�onnen sie mit Hilfedes Strahlensatzes eingetragen werden | siehe Abbildung 1.1.
TTTTTT TTTTTTTTTT21
DDDDDDDDDDDDDD
Daa!!�2 �1 0 1=2 1 2Abbildung 1.1: Die Zahlengerade und das Einzei hnen von Br�u hen.Damit erhalten wir bis jetzt die folgenden Zahlenmengen:N Menge der nat�urli hen Zahlen: N = f1; 2; 3; : : :gZ Menge der ganzen Zahlen: Z = f: : : ;�2;�1; 0; 1; 2; : : :gQ Menge der rationalen Zahlen. Eine rationale Zahl r ist ein Bru h der Formr = p=q mit p; q 2 Z und q 6= 0. 1

2 KAPITEL 1. GRUNDLAGENBEMERKUNG: Wie s hon an den obigen Beispielen si htbar, k�onnen Mengen inder Mathematik dadur h angegeben werden, dass man alle ihre Elemente mit einerges hweiften Klammer zusammenfa�t. Will man bei der Betra htung einer Zah-lenmenge M eine bestimmte Zahl x ni ht miteinbeziehen, so s hreibt man f�ur dieresultierende ZahlenmengeMnfxg. So ist beispielsweise Znf0g die Menge aller gan-zen Zahlen ohne die Null.Re henregeln f�ur Br�u he:Die Zahlen a; b; ; d seien ganze Zahlen mit b 6= 0 und d 6= 0. In Glei hung (1.4)sei zus�atzli h 6= 0. Dann gilt:Multiplikation ab � d = a � b � d (1.1)insbesondere : Erweitern ab = ab � dd = a � db � d (1.2)und : K�urzen a � db � d = ab (1.3)Division ab d = a � db � (1.4)Addition ab + d = a � d+ b � b � d (1.5)Subtraktion ab � d = a � d� b � b � d (1.6)SELBSTTEST: Was ist die Summe von 1=3 und 1=4? Weiterhin: Wie lauten dieDi�erenz, das Produkt und der Quotient dieser beiden Zahlen?BEMERKUNG: In Zukunft werden wir statt a � b au h einfa h ab s hreiben.1.2 Unglei hungenRationale Zahlen k�onnen auf der Zahlengeraden dargestellt werden. Sie lassen si halso ihrer Gr�o�e na h ordnen, wobei f�ur je zwei Zahlen x und y genau eine derfolgenden drei Relationen gilt: x < y, x = y oder y < x.1Statt y < x kann man au h x > y s hreiben. Der Ausdru k x � y und der zu ihm�aquivalente Ausdru k y � x bedeuten, dass x < y oder x = y.Aus der M�ogli hkeit, Zahlen zu ordnen, folgt die M�ogli hkeit, sie dur h Unglei- hungen in Verbindung zu setzen. Es gelten die folgenden1Auf den ersten Bli k mag dies trivial ers heinen: Auf der Zahlengerade liegt eine Zahl xnun eben entweder links von einer zweiten Zahl y, oder re hts von ihr, oder beide Zahlen sindidentis h. Wenn Sie Zahlen aber beispielsweise auf einer Kreislinie anordnen w�urden, w�are es ni htmehr m�ogli h von \links" und \re hts" zu spre hen : : :

1.3. RATIONALE UND REELLE ZAHLEN 3Re henregeln f�ur Unglei hungen:Sei x; y; v; w 2 Q und n 2 N. Dann gilt:x < y und y < z =) x < z (1.7)x < y =) x+ v < y + v (1.8)x < y und 0 < v =) vx < vy (1.9)x < y und 0 > v =) vx > vy (1.10)(1:10) mit v = �1 : x < y =) �x > �y (1.11)0 < x < y =) 0 < xn < yn (1.12)Hierbei steht die Symbolfolge \A =) B" f�ur \Aus Aussage A folgt Aussage B".Entspre hend bedeutet \A () B": \Aussage A gilt genau dann wenn AussageB gilt." In diesem Fall nennt man die Aussagen A und B au h glei hwertig oder�aquivalent (von lateinis h \aequus": glei h und \valere": Wert sein).Die obigen Re henregeln ers heinen auf den ersten Bli k sehr einfa h, da wir intuitivmit dem Begri� `Zahl' das Konzept `Zahlengerade' verbinden.2 Trotzdem s hlei hensi h hier immer wieder Fl�u htigkeitsfehler ein, gerade bei Umformungen, in denenRegel (1.10) verwendet werden m�usste, man aber �ubersehen hat, dass v < 0 unddeshalb f�als hli herweise Regel (1.9) angewendet hat ! �Uben!BEISPIEL: �x > 7 () x < �71.3 Rationale und reelle Zahlen1.3.1 Rationale ZahlenUm uns eine Vorstellung von der M�a htigkeit der rationalen Zahlen zu ma hen, stel-len wir folgende Frage: Wie viele rationale Zahlen liegen zwis hen zwei vorgegebenenrationalen Zahlen x und y mit x < y?Antwort: Die beiden vorgegebenen rationalen Zahlen seien x = a=b und y = =d.2Die zur Bes hreibung von mit einer Ri htung behafteten Gr�o�en hei�en Vektoren und lassensi h ni ht ordnen. Dies sieht man ras h anhand des aus der Physik bekannten Kraftvektors: Wenneine Kraft konstanter Gr�o�e einmal na h vorne, ein anderes Mal na h unten wirkt, ergeben si hzwei unters hiedli he Kraftvektoren, ohne dass man sagen k�onnte, wel her der beiden Vektoren\gr�o�er" ist. Au h die sogenannten komplexen Zahlen lassen si h ni ht auf einer Zahlengeradeanordnen | wir werden darauf in einem sp�ateren Kapitel zur�u kkommen. Jedem Vektor l�a�t si hjedo h eine skalare Gr�o�e, seine L�ange, zuordnen, die wieder eine geordnete Gr�o�e ist. Information�uber die Ri htung des Vektors geht dabei allerdings verloren. Glei hes gilt f�ur komplexe Zahlen,wobei man hier statt von der L�ange vom \Betrag" spri ht.

4 KAPITEL 1. GRUNDLAGENDann gilt f�ur das arithmetis he Mittel z = (x+ y)=2 der beiden Zahlen:z = x+ y2 = 12 �ab + d� = ad+ b 2bd :Also ist z ebenfalls eine rationale Zahl. Als arithmetis hesMittel erf�ullt z = (x+y)=2f�ur x < y au h x < z < y ;wie man dur h Einsetzen von z = (x+ y)=2 sieht.Wir halten fest: Das arithmetis he Mittel zweier rationaler Zahlen x und y ist wiedereine rationale Zahl und liegt zwis hen x und y. Wiederholen wir das Argument mitx und z, so k�onnen wir s hlu�folgern, dass au h das arithmetis he Mittel von x undz wieder eine rationale Zahl ist, die zwis hen den beiden urspr�ungli hen Zahlen xund y liegt. Da man diesen S hritt beliebig oft wiederholen kann, muss gelten:Satz:Zwis hen zwei rationalen Zahlen liegen unendli h viele weitere rationale Zahlen.SELBSTTEST: Versu hen Sie, si h den Inhalt des letzten Satzes bildli h vorzu-stellen. Nehmen Sie dazu als Ausgangszahlen x = 1 und y = 2. Wel he Folge vonarithmetis hen Mitteln erhalten Sie?Wel he S hlussfolgerung ziehen Sie f�ur die Struktur der rationalen Zahlen auf derZahlengerade? Verglei hen Sie Ihr Ergebnis mit dem folgenden Resultat:1.3.2 Reelle ZahlenEs existieren unendli h viele (!) Punkte auf der Zahlengerade, die keine rationalenZahlen sind. Beispielsweise gilt:Satz:Es gibt keine rationale Zahl x mit x2 = 2. Oder: p2 ist keine rationale Zahl.Beweis:Vorbemerkung: Zwei ganze Zahlen p; q 2 N hei�en teilerfremd, wenn ihre Zerlegungin Primzahlfaktoren keine glei hen Faktoren enth�alt. Ein Beispiel: 15 (= 3� 5) und8 (= 2� 2� 2) sind teilerfremd. 15 und 25 (= 5� 5) sind ni ht teilerfremd.1. S hritt: x ist keine ganze Zahl.Beweis: x kann keine ganze Zahl sein, da das Quadrat einer Zahl mit dem Betrag derZahl w�a hst. Es gilt: 1 � 1 = 1 < 2 ;2 � 2 = 4 > 2 ;3 � 3 = 9 > 2 et . und�1 � �1 = 1 < 2 ;�2 � �2 = 4 > 2 ;�3 � �3 = 9 > 2 et .2. S hritt: x ist keine rationale Zahl.Beweis dur h Widerspru h: Wir nehmen an, x sei eine rationale Zahl, x 2 Q. Wegen(1) wissen wir s hon, dass x keine ganze Zahl ist. Na h Primzahlzerlegung und K�urzenmu� x deshalb als Quotient x = p=q zweier teilerfremder Zahlen p; q 2 N ges hriebenwerden k�onnen. Dann ist aber x2 = p2=q2 ebenfalls teilerfremd, also si her keine

1.3. RATIONALE UND REELLE ZAHLEN 5ganze Zahl wie 2. Widerspru h! Also kann die Wurzel aus 2, p2 keine rationale Zahlsein. 3 2Es l�a�t si h also bei weitem ni ht jede Zahl als Bru h zweier ganzer Zahlen s hreiben,eine Tatsa he, die s hon den alten Grie hen bekannt war.SELBSTTEST: Das Verh�altnis von L�ange zu Breite eines Din-A4 Blattes ist geradeso gew�ahlt, dass es beim Falten zu einem Din-A5 Blatt erhalten bleibt. Und soweiter. (Diese Eigens haft haben beispielsweise US-Formate ni ht!) Wie gross istdeshalb dieses Verh�altnis von L�ange zu Breite?Alle Punkte der Zahlengerade zusammen hei�en reelle Zahlen. Die Menge derreellen Zahlen wird mit dem Symbol R bezei hnet. Die einzelnen jetzt de�niertenZahlenmengen bilden jeweils Teilmengen: N � Z � Q � R. Reelle Zahlen wie p2,� oder e, die keine rationalen Zahlen sind, hei�en irrationale Zahlen.BEMERKUNG: Es gibt einen fundamentalen Unters hied zwis hen den rationalenund den reellen Zahlen, der eng mit p2 zusammenh�angt. Zuerst sollte man si h klarma hen, weshalb man �uberhaupt so gro�en Wert auf Zahlen wie p2 legt.Viellei ht erinnern Sie si h no h an den Satz von Phythagoras. Er besagt, dass ineinem re htwinkligen Dreie k die Summe der Quadrate der Katheten glei h demQuadrat der Hypothenuse ist (a2 + b2 = 2). Wir betra hten nun ein Dreie k,bei dem die Katheten die L�ange Eins haben (a = b = 1). Aus dem Satz vonPythagoras folgt, dass die Hypothenuse die L�ange p2 hat. Mit anderen Worten:p2 ist eine geometris h motivierte Gr�o�e. Wenn wir eine vollst�andige Zahlengeradehaben wollen, sollte p2 au h dazugeh�oren.Wir haben gezeigt, dass p2 keine rationale Zahl sein kann. In diesem Sinne sinddie rationalen Zahlen unvollst�andig. Auf der anderen Seite nennt man die reellenZahlen vollst�andig. Sie umfassen p2;p3;p5; � und all die anderen Gr�o�en, diezwar auf der Zahlengeraden liegen sollten, von denen si h aber zeigen l�asst, dass siekeine rationalen Zahlen sein k�onnen.Bei den reellen Zahlen werden wir oft die positiven reellen Zahlen spezi�s h be-tra hten und mit R+ bezei hnen, oder R+0 , die ni ht-negativen reellen Zahlen (diepositiven reellen Zahlen zusammen mit der Null).BEMERKUNG: Die Re henregeln (1.7) { (1.12) f�ur Unglei hungen sind darin be-gr�undet, dass rationale Zahlen ihrer Gr�o�e na h angeordnet werden k�onnen, undgelten deshalb au h f�ur alle reellen Zahlen.S hlu�bemerkung: Au h wenn die reellen Zahlen vollst�andig sind, gibt es denno hRe henoperationen, die keine L�osungen innerhalb dieser Zahlenmenge haben. Sokann die Wurzel aus minus Eins keine reelle Zahl sein, p�1 =2 R, da das Quadratjeder reellen Zahl ni ht-negativ ist. Diese Beoba htung f�uhrt in einem sp�aterenKapitel auf die De�nition der komplexen Zahlen C.1.3.3 IntervalleAbs hnitte der Zahlengerade werden au h als Intervalle bezei hnet. Abh�angig da-von, ob die Grenzen im Intervall enthalten sind oder ni ht, unters heidet man dabei:3Dieser zweite S hritt ist als Widerspru hsbeweis gef�uhrt, und zeigt deutli h die zwingendeLogik einer mathematis hen Beweisf�uhrung. Wir werden an einigen wi htigen Stellen weitere ma-thematis he Beweise anf�uhren | ni ht zuletzt, um die Struktur mathematis her S hlussfolgerun-gen zu beleu hten | uns im Allgemeinen jedo h auf Ergebnisse und (biologis he) Anwendungenkonzentrieren.

6 KAPITEL 1. GRUNDLAGENDe�nition (Intervalle):Seien a und b zwei reelle Zahlen mit a < b. Dann hei�t:abges hlossenes Intervall : [a; b℄ = fxja � x � bg (1.13)o�enes Intervall : (a; b) = fxja < x < bg (1.14)re hts halbo�enes Intervall : [a; b) = fxja � x < bg (1.15)links halbo�enes Intervall : (a; b℄ = fxja < x � bg (1.16)BEMERKUNG: Die S hreibweise fxjx > ag bedeutet: die Menge aller x mit derEigens haft x > a.BEMERKUNG: Ein Intervall kann si h auf einer (oder beiden) Seiten au h bisUnendli h (1) erstre ken, wobei man \Unendli h" selbst nie als eigentli he Zahlau�asst. Man s hreibt also beispielsweise (a;1) f�ur fxja < xg. Damit gilt au h:R = (�1;1), R+0 = [0;1) und R+ = (0;1).1.4 Betrag einer reellen ZahlInteressiert man si h f�ur den Temperaturunters hied zwis hen zwei K�orpern oderden Konzentrationsunters hied von zwei L�osungen, so will man oft ni ht wissen,ob die entspre hende Gr�o�e positiv oder negativ ist, sondern nur, wel hen Wert sieunabh�angig von ihrem Vorzei hen hat.Mathematis h gesehen bedeutet dies, dass man si h in diesen F�allen nur f�ur den Ab-stand zweier Zahlen auf der Zahlengerade interessiert, ni ht aber daf�ur, wel he derbeiden Zahlen die gr�o�ere und wel he die kleinere Zahl ist. Dies f�uhrt auf folgendeDe�nition (Betrag):Sei x 2 R. Der Betrag jxj ist de�niert als jxj =8<: x f�ur x � 0�x f�ur x � 0
BEMERKUNG: Auf der Zahlengerade entspri ht der Betrag einer Zahl genau ihremAbstand vom Nullpunkt.

1.5. SUMMEN 7Eigens haften des Betrages:Sei x; y 2 R. Dann gilt: jxj � 0 (1.17)jxj = 0 () x = 0 (1.18)jx � yj = jxj � jyj (1.19)(1:19) mit y = �1 : j � xj = jxj (1.20)F�ur y 6= 0 : ����xy ���� = jxjjyj (1.21)�jxj � x � jxj (1.22)Dreie ksunglei hung : jx+ yj � jxj+ jyj (1.23)Der Name \Dreie ksunglei hung" r�uhrt daher, dass (1.23) au h gilt, wenn x und yVektoren sind (wir kommen darauf in einem sp�ateren Kapitel zur�u k). In diesemFall bedeutet die Dreie ksunglei hung (1.23), dass die Summe der L�angen von zweiDreie ksseiten immer gr�o�er als die L�ange der dritten Seite ist. Das Glei hheitszei- hen gilt f�ur das entartete Dreie k (H�ohe glei h Null).1.5 SummenOft m�o hte man die Summe mehrerer, viellei ht sogar (unendli h) vieler Summan-den bilden und mit derart \langen" Ausdr�u ken bequem re hnen k�onnen. Bezei hneta1 den ersten Summanden, a2 den zweiten Summanden : : : und an den n-ten Sum-manden, so m�o hte man also gerne eine kompakte S hreibweise f�ur a1+a2+ : : :+anzur Verf�ugung haben.Als Beispiel betra hten wir die Summe 1+ 22 +32 + 42 + : : :+ n2. Wir summierenhier also n Glieder, wobei das �-te Glied die Form �2 hat. Diesen Vorgang k�urzenwir von nun an mit der SymbolfolgePn�=1 �2 ab. Lies: \Summe �uber �2 von � glei hEins bis n".Das �-te Glied einer Summe wird nat�urli h ni ht immer die Form �2 haben. DieSumme 1+ 12+ 13+: : :+ 1n wird zum Beispiel dur hPn�=1 1� abgek�urzt. Im allgemeinenFall bezei hne a� das �-te Glied. Es folgt:De�nition (Summensymbol):Sei n � 1. Dann setzt mannX�=1 a� = a1 + a2 + : : :+ an�1 + an (1.24)

8 KAPITEL 1. GRUNDLAGENUm also die linke Seite von (1.24) auszuwerten, setzt man den Index � sukzessiveauf ganze Zahlen, von der unteren Grenze � = 1 bis zur oberen Grenze (hier � =n), bere hnet jeweils den Ausdru k hinter dem Summenzei hnen, und addiert dieeinzelnen Beitr�age.Wi htig:Da der Lau�ndex nur als \Markierung" der einzelnen Terme fungiert, kann erdur h ein beliebiges anderes Symbol ersetzt werden, wenn dies glei hzeitig anallen Stellen ges hieht, an denen der Index auftau ht:nX�=1 a� = nX�=1 a� (1.25)Im Englis hen wird der Lau�ndex deshalb au h \dummy index" genannt.
BEISPIELE:P5�=1 �2 = 12 + 22 + 32 + 42 + 52 = 1 + 4 + 9 + 16 + 25 = 55P3�=1 ��2 = 1 + 14 + 19P4�=1 2�� = 12 + 14 + 18 + 116Betra htet man verallgemeinernd Summen, bei denen die Summation ni ht bei 1,sondern bei einer anderen ganzen Zahlm < n beginnt, so s hreibt man entspre hendnX�=m a� = am + am+1 + : : :+ an�1 + an : (1.26)BEISPIELE:P5�=0 � = 0 + 1 + 2 + 3 + 4 + 5 = 15P3�=2 5 = 5 + 5 = 10P1�=�2 �3 = (�2)3 + (�1)3 + 03 + 13 = �8 + (�1) + 0 + 1 = �8Aus der De�nition (1.24) erh�alt man direkt folgende Re henregeln f�ur das Summen-symbol:

1.5. SUMMEN 9Re hnen mit dem Summensymbol:Vers hiebung des Index : nX�=0 a� = n+mX�=m a��m (1.27)Addition : nX�=0 a� + nX�=0 b� = nX�=0(a� + b�) (1.28)Subtraktion : nX�=0 a� � nX�=0 b� = nX�=0(a� � b�) (1.29)nX�=0 a� + mX�=n+1 a� = mX�=0 a� (1.30)Distributivgesetz : nX�=0 a�! mX�=0 b�! = mX�=0 nX�=0 a�b� (1.31)speziell : � nX�=0 a� = nX�=0( a�) (1.32)Vertaus hungsregel : mX�=0 nX�=0 a��! = nX�=0 mX�=0 a��! (1.33)SELBSTTEST: Veri�zieren Sie die obigen Regeln dadur h, dass Sie jeweils dielinken und re hten Seiten explizit auss hreiben. Als Beispiel f�uhren wir dies f�ur(1.28) vor: Pn�=0 a� +Pn�=0 b� = (a0 + a1 + : : : + an) + (b0 + b1 + : : : + bn) =(a0 + b0) + (a1 + b1) + : : :+ (an + bn) =Pn�=0(a� + b�).1.5.1 Eine Anwendung: Die geometris he ReiheDerzeit werden weltweit j�ahrli h ir a 2% der bekannten �Olreserven verbrau ht.Falls keine nennenswerten neuen Vorkommen gefunden werden und der Verbrau hkonstant bleibt, sind die Reserven in ungef�ahr 50 Jahren ers h�opft. Falls es jedo hgel�ange, den Verbrau h in jedem Jahr dur h te hnis he Verbesserungen und spar-samere Nutzung zu verringern, k�onnten die Reserven viel l�anger halten.Um das Einsparpotential abzus h�atzen, wollen wir annehmen, dass der Verbrau hin Zukunft in jedem Jahr um einen konstanten Faktor f gesenkt wird. Wie ho h istdann der akkumulierte Verbrau h na h n Jahren?Relativ zum gegenw�artigen Stand betr�agt der Verbrau h in diesem einfa hen Szena-rio im n�a hsten Jahr no h 1� f , im �ubern�a hsten Jahr ist er auf den Wert (1� f)2gesunken, im darau�olgenden Jahr auf (1 � f)3, und so weiter. K�urzen wir denAusdru k 1� f mit q ab, betr�agt der in n Jahren akkumulierte Verbrau h:1 + q + q2 + q3 + : : :+ qn = nX�=0 q� (1.34)Diese Summe wird in der Mathematik als endli he geometris he Reihe bezei h-net und ist dadur h harakterisiert, dass der Quotient zweier aufeinanderfolgenderSummanden konstant ist. Dieser Quotient entspri ht in unserem Beispiel geradedem Wert q.

10 KAPITEL 1. GRUNDLAGENF�ur alle nat�urli hen Zahlen n und q 6= 1 gilt:1 + q + q2 + : : :+ qn = (1 + q + q2 + : : :+ qn)(1� q)1� q= 1� q + q � q2 + q2 � : : :� qn + qn � qn+11� q= 1� qn+11� q (1.35)Verringert si h beispielsweise der Verbrau h in jedem Jahr um 1%, so entspri htdies einem Wert von q von 0:99. In diesem Fall h�atten wir in 50 Jahren einenakkumulierten Verbrau h in H�ohe von (1 � 0:9950)=(1 � 0:99) � 39:49 derzeiti-gen Jahresverbr�au hen. Denno h w�aren die Reserven na h einigen weiteren Jahreners h�opft.Wir k�onnen uns aber umgekehrt fragen, wie stark der Verbrau h gedrosselt werdenm�usste, damit si h die Reserven zumindest in diesem Modell nie ers h�opfen.4 Dazusu hen wir denjenigen Wert von q, f�ur den der akkumulierte Verbrau h au h f�urbeliebig hohes n ni ht den 50-fa hen gegenw�artigen Verbrau h �ubersteigt. Mathe-matis h bedeutet dies, dass wir die unendli he geometris he Reihe P1�=0 q�betra hten und uns dann die Frage stellen, f�ur wel hen Wert von q gilt, dassP1�=0 q� = 50 ist.Dazu m�ussen wir die letzte Glei hung na h q au �osen. Dies gelingt uns mit Hilfevon Glei hung (1.35). Wir stellen dabei fest, dass der Term qn+1 f�ur 0 < q < 1 mitwa hsendem n immer kleiner wird. Alle anderen Terme h�angen dagegen ni ht vonn ab. Wenn n immer gr�o�er und gr�o�er wird, k�onnen wir deshalb den Term qn+1verna hl�assigen und erhalten P1�=0 q� = 1=(1 � q). Angewandt auf unsere Frageerhalten wir also die Bedingung 1=(1 � q) = 50. Diese Glei hung l�a�t si h einfa hna h q au �osen und wir erhalten q = 0:98.Dies ist ein h�o hst erstaunli hes Resultat. Es besagt ni hts anderes, als dass die�Olreserven beliebig lange halten w�urden, wenn der weltweite Verbrau h konsequentjedes Jahr um 2% (oder mehr) verringert w�urde!SELBSTTEST: Sie teilen einen Ku hen in zwei H�alften, eine der beiden H�alftenwiederum in zwei H�alften, et . Damit erhalten Sie eine Folge von immer kleinerenKu henst�u ken, deren insgesamte Gr�o�e im Verglei h zu der des urspr�ungli henKu hens dur h 1=2+1=4+1=8+ : : : = 1=2 � (1+1=2+1=4+ : : :) gegeben ist. Wel heGesamtgr�o�e erhalten Sie na h n S hnitten, und wel her Zahl strebt dieser Wertzu, wenn Sie n beliebig anwa hsen lassen? Wundert Sie Ihr Ergebnis?4Die folgende Analyse geht �uber den bisher behandelten Sto� hinaus. Wegen der interessantenThematik wollen wir Ihnen aber s hon hier einen Vorges hma k auf mathematis he Methodengeben, die wir in den n�a hsten Kapiteln systematis h entwi keln werden.

1.6. AUFGABEN 111.6 Aufgaben1. (Bru hre hnen) Bere hnen Sie folgende Br�u he und k�urzen Sie wenn m�ogli h!(a) 65 � 103 =(b) 2197 � 1973 =( ) 322 � 13 = (d) 32 + 52 =(e) 13 + 14 =(f) 32 � 23 = (g) 23 � 54 =(h) 25310 =(i) 571021 =2. (Summen) Bere hnen Sie folgende Summen:(a) 5Xk=1 k (b) 4X�=2�2 ( ) 6Xn=4(n� 2)23. (Betrag, Unglei hung) F�ur wel he x sind folgende Unglei hungen erf�ullt?(a) jxj < 2 (b) jx� 1j > 2 ( ) jx+ 2j � 44. (Summen) Bere hnen Sie folgende Summen:(a) 4Xi=1 i =(b) 3Xm=0(m+ 1) =( ) 5X�=2 3 =(d) NX�=1 a =(e) 4Xq=1 2q =(f) 3Xn=1n2 =
(g) 5Xq=3(q � 2)2 =(h) 4Xa=0 a� 4Xb=0 b =(i) 4X�=0 �2 � 3X�=0�2 =5. (Summen) S hreiben Sie folgende Summen ohne Summenzei hen:(a) 6X�=2x� (b) 5Xk=1(�1)k xkk6. (Summen) S hreiben Sie folgende Summen mit dem Summenzei hen:(a) 1 + x+ x2 + x3 + x4 + : : :+ x20(b) x+ 4x2 + 9x3 + 16x4 + : : :+ 100x10( ) 1� x+ x2 � x3 + x4 � : : :+ x8(d) x� x22 + x33 � x44 + : : :� x12127. (Summen, Mittelwert, Varianz) Werden bei einem Experiment n Me�werte x1,x2, . . . , xn gemessen, dann hei�tx = 1n nXi=1 xi \arithmetis hes Mittel" und (1.36)

12 KAPITEL 1. GRUNDLAGEN�2x = 1n nXi=1(xi � x)2 \Varianz". (1.37)Zeigen Sie: �2x = x2 � x2 (1.38)wobei x2 = 1n nXi=1 x2i (1.39)Bemerkung: �x =p�2x hei�t \Standardabwei hung".8. (Betrag, Unglei hung) F�ur wel he x sind folgende Unglei hungen erf�ullt?(a) 3jx� 1j < 4(b) ���x� j1j��� � 2 ( ) jxj � 12x+ 1(d) j2x� 4j > 8x+ 1

Kapitel 2Funktionen und ihregraphis he Darstellung2.1 FunktionenEin zentraler Aspekt wissens haftli her Untersu hungen besteht darin, systemati-s he Beziehungen zwis hen vers hiedenen Messgr�o�en aufzude ken: \Die Anzahlder Insekten wu hs w�ahrend des Beoba htungszeitraums exponentiell an." Oder:\Die Photosyntheseaktivit�at variierte im Tagesverlauf n�aherungsweise wie eine Si-nusfunktion." Oder: \Die Immunantwort verhielt si h in Abh�angigkeit von der Vi-ruskonzentration wie die Funktion ..."Mathematis h werden derartige Zusammenh�ange einer abh�angigen Variablen(z.B. Gr�o�e einer Insektenpopulation) von einer anderen, unabh�angigen Varia-blen (z.B. der Zeit) dur h den f�ur alle weiteren �Uberlegungen zentralen Begri� derFunktion bes hrieben. Dabei k�onnen sowohl die abh�angige Variable als au h dieunabh�angige Variable kontinuierli he oder diskrete Werte annehmen. Statt Funkti-on spri ht man oft au h von einer Abbildung:De�nition (Funktion):X und Y seien beliebige ni htleere Mengen. Eine Abbildung (oder Funktion)f von X na h Y , f : X ! Y ; (2.1)ordnet jedem Element x 2 X genau ein Element y 2 Y zu,x 7! y = f(x) : (2.2)Hierbei hei�t x Argument der Funktion f oder unabh�angige Variable,y hei�t abh�angige Variable und f(x) wird Funktionswert von f an derStelle x genannt.X wird als De�nitionsberei h von f bezei hnet, Y als Zielmenge von f . DerWerteberei hW einer Funktion f ist die Menge aller y 2 Y , f�ur die ein x 2 Xexistiert, so dass y = f(x).Die Zielmenge Y ist also die Menge aller zugelassenen m�ogli hen Funktionswerte, derWerteberei h W die Menge der tats�a hli h angenommenen Funktionswerte. Damit13

14 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGist der Werteberei h eine Teilmenge der Zielmenge, was man formal als W � Ys hreibt. Je na h Funktion und De�nition der Zielmenge ist W mit Y identis hoder aber eine e hte Teilmenge von Y .Statt (2.1) und (2.2) s hreibt man oft kurz:y = f(x) (2.3)Begri�i h mu� man zwis hen der Funktion f als f�ur alle x 2 X geltenden Zuord-nungsvors hrift und dem Wert f(x) als speziellem Funktionswert von f an der Stellex unters heiden.BEMERKUNG: Eine Funktion f ist erst dann vollst�andig bestimmt, wenn Abbil-dungsvors hrift, De�nitionsberei h und Zielmenge angegeben werden. Sol he Ex-aktheit ist oft un�ubersi htli h. Sind De�nitionsberei h und Zielmenge aus dem Zu-sammenhang klar, werden wir Funktionen nur dur h die Abbildungsvors hrift, etway = x2, bes hreiben.De�nition (Reellwertige und reelle Funktion):Eine Funktion f hei�t reellwertig, wenn Y eine Teilmenge der reellen Zahlenist, und reell, wenn zus�atzli h au h X eine Teilmenge der reellen Zahlen ist.In dieser Vorlesung werden X und Y meist N, Z, Q, R, R+, R+0 oder Intervallesein.BEISPIELE:F�ur f : R! R+0 ; f(x) = x2 gilt X = R, Y =W = R+0 .F�ur f : R! R; f(x) = 3x gilt X =W = Y = R.F�ur f : R+ ! R+; f(x) = 3x gilt X =W = Y = R+.F�ur f : R! R; f(x) = x2 gilt X = Y = R, W = R+0 .Funktionen kann man gut dur h eine Wertetabelle verans hauli hen.BEISPIEL:Die Funktion y = 2x+ 1 ergibt als Wertetabellex 0 1 2 3 4 5y 1 3 5 7 9 11Zur Ans hauung gut geeignet sind au h graphis he Darstellungen. Dabei ist derGraph G einer Funktion die Menge aller geordneten Paare (x; y) mit y = f(x) undx 2 X . Zur Darstellung tr�agt man die unabh�angige Variable auf der Abszisse, dieabh�angige Variable auf der Ordinate eines re htwinkligen Koordinatensystems auf| siehe Abbildung 2.1.SELBSTTEST: Warum entspri ht die Funktion y = 2x+1 graphis h einer Geradendur h die beiden Punkte (0; 1) und (1; 3)?Dur h eine Funktion k�onnen mehrere Elemente x 2 X auf das glei he Elementy 2 Y abgebildet werden. So wird bei der quadratis hen Funktion f : R ! R,f(x) = x2 beispielsweise sowohl die Zahl +2 als au h die Zahl �2 auf die Zahl +4abgebildet.

2.1. FUNKTIONEN 15y = 2x+ 1
-1
0
1
2
3
y
-1 -0.5 0 0.5 1 1.5 2 2.5 xAbbildung 2.1: Graph der Funktion y = 2x+ 1.Es kann au h Elemente y 2 Y geben, die keinem Element x 2 X mittels derFunktion f zugeordnet sind. Dies tri�t bei der gerade angegebenen Funktion aufalle negativen y-Werte zu. (Dagegen wird na h De�nition bei jeder Funktion jedesElement x auf genau einen Wert y abgebildet.)Diese Beoba htungen geben Anla� zu den folgenden Begri�en:De�nition (injektiv, surjektiv, bijektiv):Eine Abbildung f hei�t injektiv, wenn zwei vers hiedenen Elementen x1 6= x2immer zwei vers hiedene Elemente y1 6= y2 zugeordnet werden.Eine Abbildung f hei�t surjektiv, wenn es zu jedem Element y 2 Y ein x 2 Xgibt, so dass y = f(x) gilt.Eine Abbildung f hei�t bijektiv, wenn sie injektiv und surjektiv ist.BEISPIELE:Die Funktionen f1 : R! R, f1(x) = 2 und f2 : R! R, f2(x) = x2 sindweder injektiv no h surjektiv.Die Funktion f3 : R+0 ! R+0 , f3(x) = x2 ist jedo h sowohl injektiv alsau h surjektiv, also bijektiv.Au h die Funktionen f4 : R! R, f4(x) = 4x und f5 : R! R, f5(x) = x3sind bijektiv.Siehe au h Abb. 2.2!SELBSTTEST: Begr�unden Sie die obigen Aussagen!

16 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGBeispiele f�ur Funktionen, die weder injektiv no h surjektiv sind:f1(x) = 2x
y
f2(x) = x2x
y
Beispiele bijektiver Funktionen:f3(x) = x2
x
y f4(x) = 4xx
y f5(x) = x3x
y
Abbildung 2.2: Graphen der Funktionen f1 bis f5.De�nition (Monotonie von Funktionen):Eine Funktion f : R ! R hei�t monoton wa hsend, wenn f�ur alle Zahlenx1; x2 gilt:Aus x1 < x2 folgt stets f(x1) � f(x2) .Die Funktion hei�t streng monoton wa hsend, wenn gilt:Aus x1 < x2 folgt stets f(x1) < f(x2) .Die Begri�emonoton fallend und streng monoton fallend werden entspre- hend de�niert.streng monoton wa hsend monoton wa hsend streng monoton fallend monoton fallendgerade ungerade periodis h
Abbildung 2.3: S hematis he Darstellung wi htiger Eigens haften von Funktionen.SELBSTTEST: Zeigen Sie, dass jede streng monotone Funktion injektiv ist.SELBSTTEST: Zeigen Sie, dass eine monotone Funktion ni ht unbedingt injektivsein mu�.

2.1. FUNKTIONEN 17Grundidee der Umkehrfunktion: Wir betra hten die Quadratfunktionf : R+0 ! R+0x 7! x2 : (2.4)Diese Funktion ist bijektiv. Damit k�onnen wir jedem y genau ein x zuordnen,x = py : (2.5)Vertaus hen wir nun x mit y, dann erhalten wir als Umkehrfunktion f�1 derQuadratfunktion die Quadratwurzelfunktionf�1 : R+0 ! R+0x 7! px : (2.6)y = x2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
y
0 0.2 0.4 0.6 0.8 1 1.2 1.4 x
y = px0
0.2
0.4
0.6
0.8
1
1.2
1.4
y
0 0.2 0.4 0.6 0.8 1 1.2 1.4 xAbbildung 2.4: Die Quadratfunktion und ihre Umkehrfunktion | die Quadratwurzel-funktion.Notiz:Wi htig: Im allgemeinen gilt f�1 6= 1f . Ein Beispiel: px 6= 1x2 .Das Vertaus hen von x und y entspri ht einer Spiegelung des Graphen an der Gera-den x = y, die au h als Hauptdiagonale bezei hnet wird. Damit gilt ganz allgemein:Notiz:Aus dem Graph einer invertierbaren Funktion erh�alt man den Graph ihrer Um-kehrfunktion dur h Spiegelung an der Hauptdiagonalen.Au h f�ur y = px k�onnen wir eine Umkehrfunktion bilden. Dies ist wieder dieFunktion y = x2. Allgemein gilt:Notiz:Eine umkehrbare Funktion ist identis h mit der Umkehrfunktion ihrer Umkehr-funktion.F�ur jede bijektive Funktion kann eine Umkehrfunktion in eindeutiger Weise mitHilfe der hier skizzierten Konstruktion de�niert werden.

18 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGNotiz:Bijektivit�at ist eine hinrei hende und notwendige Bedingung daf�ur, dass eineFunktion umkehrbar ist.Auf diese Weise erh�alt man viele wi htige Funktionen als Umkehrfunktionen vons hon bekannten Funktionen. So ist beispielsweise die Logarithmusfunktion die Um-kehrfunktion der Exponentialfunktion.Falls eine Ausgangsfunktion ni ht bijektiv ist, kann man sie oft in einem erstenS hritt dur h geeignete Eins hr�ankung des De�nitionsberei hes und/oder der Ziel-menge zu einer bijektiven Funktion ma hen. Dies haben wir bei der Quadratfunktiondadur h errei ht, dass wir den De�nitionsberei h auf die ni htnegativen reellen Zah-len einges hr�ankt haben. Wir werden sp�ater no h mehrere andere derartige Beispielediskutieren.2.2 Komposition von FunktionenUnters hiedli he Funktionen k�onnen miteinander wie im Fall y = [sin(x)℄2 kom-biniert werden. In den n�a hsten Unterkapiteln werden wir zun�a hst die dadur herrei hbare Vielfalt an Funktionen an einfa hen Beispielen diskutieren. Dabei be-tra hten wir vor allem die Graphen der Funktionen, um uns damit vertraut zuma hen, was einfa he Kompositionen ans hauli h bedeuten.2.2.1 TranslationTranslation in y-Ri htung: Den Graph der Funktiony = f(x) + b (2.7)erh�alt man aus dem Graph der Funktion y = f(x) dur h eine Translation, bei derjeder Punkt (x; y) in den Punkt (x; y + b) �ubergeht.Translation in x-Ri htung: Den Graph der Funktiony = f(x� a) (2.8)erh�alt man aus dem Graph der Funktion y = f(x) dur h eine Translation, bei derjeder Punkt (x; y) in den Punkt (x + a; y) �ubergeht.SELBSTTEST: Warum ers heint das Minus-Zei hen in Glei hung (2.8)?Setzt man beide Translationen zusammen, so erh�alt man dieNotiz (Translation):Den Graph der Funktion y = f(x� a) + b (2.9)erh�alt man aus dem Graph der Funktion y = f(x), indem man jeden Punkt(x; y) in (x+ a; y + b) vers hiebt.

2.2. KOMPOSITION VON FUNKTIONEN 19BEISPIEL:Der Graph der Funktion y = (x � 1)2 + 2 ergibt si h dur h eine Transla-tion aus der Funktion y = x2, wobei der Punkt (0; 0) in den Punkt (1; 2)�ubergeht.(a)-1
-0.5
0
0.5
1
1.5
2
2.5
y
-3 -2 -1 0 1 2 x
y=x2
(b)-1
-0.5
0
0.5
1
1.5
2
2.5
y
-3 -2 -1 0 1 2 x
y=(x-1)2+1
( )-1
-0.5
0
0.5
1
1.5
2
2.5
y
-3 -2 -1 0 1 2 x
y=2x2
Abbildung 2.5: (a) Die Quadratfunktion, (b) um Eins na h re hts und oben vers hobenoder ( ) um den Faktor zwei in y-Ri htung gestre kt.Viele Abl�aufe in der Physik und Biologie wiederholen si h (nahezu) regelm�a�ig. Diesf�uhrt auf die folgendeDe�nition (periodis he Funktion):Eine Funktion ist periodis h mit Periode P , wennf(x+ P ) = f(x) (2.10)f�ur alle reellen x gilt.Der Graph einer periodis hen Funktion ver�andert si h also ni ht, wenn er um denBetrag P in Ri htung der x-A hse vers hoben wird.BEISPIEL:Die Funktion y = sin(x) hat die Periode 2�.BEMERKUNG: Eine Funktion mit Periode P hat na h der De�nition (2.10) au hdie Periode 2P , 3P , et ., womit deutli h wird, dass der Begri� \Periode" in der Ma-thematik anders als in der Umgangsspra he verwendet wird. Das umgangsspra hli- he Konzept \Periode" wird in der Mathematik mit dem pr�aziseren Begri� \kleinstePeriode" bes hrieben.2.2.2 Stre kung und Stau hungStre kung/Stau hung in x-Ri htung: Den Graph der Funktiony = f( x) mit > 0 (2.11)erh�alt man aus dem Graph der Funktion y = f(x), indem man jeden Punkt (x; y)in (x= ; y) �uberf�uhrt. F�ur > 1 entspri ht dies einer Stau hung, f�ur < 1 einerStre kung in x-Ri htung.SELBSTTEST: Warum mu� man den Punkt (x; y) in (x= ; y) �uberf�uhren { undni ht in ( x; y)?

20 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGStre kung/Stau hung in y-Ri htung: Den Graph der Funktiony = d f(x) mit d > 0 (2.12)erh�alt man aus dem Graph der Funktion y = f(x), indem man jeden Punkt (x; y)in (x; dy) �uberf�uhrt. F�ur d > 1 entspri ht dies einer Stre kung, f�ur d < 1 einerStau hung in y-Ri htung.Notiz (Stre kung oder Stau hung):Den Graph der Funktion y = df( x) mit ; d > 0 (2.13)erh�alt man aus dem Graphen von y = f(x), indem man die x-A hse um denFaktor 1= und die y-A hse um den Faktor d skaliert.BEISPIELE:Die Funktion y = 2x2 erh�alt man aus y = x2 dur h Stre kung der y-A hseum den Faktor 2.Die Funktion y = sin(2x) erh�alt man aus y = sin(x) dur h Stre kung derx-A hse um den Faktor 1=2.(a)
-1
0
1
-4 0 4 8 12
(b)-1
0
1
-4 0 4 8 12Abbildung 2.6: Die Sinusfunktion mit (a) Periode 2� (sin(x)) und (b) � (sin(2x)).2.2.3 SpiegelungNotiz:Den Graphen von y = f(�x) erh�alt man dur h Spiegelung des Graphen vonf an der y-A hse, den Graphen von y = �f(x) dur h Spiegelung an derx-A hse.BEISPIEL:Der Graph von y = e�x ergibt si h aus dem Graphen von y = ex dur hSpiegelung an der y-A hse (Siehe au h Abbildung 2.7).SELBSTTEST: Wie sieht der Graph von y = �e�x aus?

2.2. KOMPOSITION VON FUNKTIONEN 21
-3
-2
-1
0
1
2
y
-3 -2 -1 0 1 2 x
ex
e-x
-exAbbildung 2.7: Die Exponentialfunktion und zwei Spiegelungen.SELBSTTEST: Wir haben bisher bei Stre kungen und Stau hungen nur positiveFaktoren zugelassen. Wel hen Wert von bzw. d m�u�te man w�ahlen, um eine Spie-gelung an der x- oder y-A hse formal als Stre kung zu bes hreiben? Allgemeiner:Wel he Bedeutung h�atten beliebige negative Werte von ?De�nition (Gerade und ungerade Funktion):Eine Funktion y = f(x) hei�t gerade, wennf(�x) = f(x) (2.14)f�ur alle x gilt, und sie hei�t ungerade, wennf(�x) = �f(x) (2.15)f�ur alle x gilt.Gerade Funktionen zei hnen si h also dadur h aus, dass si h ihr Graph dur h eineSpiegelung an der y-A hse ni ht ver�andert. Ungerade Funktionen sind dagegen da-dur h gekennzei hnet, dass si h ihr Graph ni ht ver�andert, wenn er an der x-A hseund der y-A hse gespiegelt wird.Notiz:Die na heinander ausgef�uhrte Spiegelung an x- und y-A hse ist mit einerPunktspiegelung am Ursprung | dem Punkt (0; 0) | identis h.SELBSTTEST: Veri�zieren Sie die Aussage dieser Notiz!Im allgemeinen sind Funktionen jedo h weder gerade no h ungerade.BEISPIEL:Die Funktion y = x2 ist gerade, die Funktion y = x3 ist ungerade unddie Funktion y = (x � 2)2 ist weder gerade no h ungerade, sie ist jedo hsymmetris h bez�ugli h einer zur y-A hse parallelen Gerade dur h den Punkt(2; 0).

22 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGBEMERKUNG: Stre kungen und Translationen k�onnen au h miteinander kombi-niert werden. Dabei ist zu bea hten, dass im Allgemeinen ein Unters hied besteht,ob man eine Funktion zuerst stre kt und dann vers hiebt, oder zuerst vers hiebtund dann stre kt, wie die Umformung f [ (x + b)℄ = f [ x + b℄ 6= f [ x + b℄ zeigt.Bei der R�u kf�uhrung komplizierter Funktionen auf einfa he Prototypen gehe mandeshalb sorgf�altig vor und ma he si h S hritt f�ur S hritt bewusst, wel he Operationman im Moment gerade ausf�uhrt.BEISPIEL:Sei = 2, b = 3 und f(x) = x2. Dann istf ( (x+ b)) = [2(x+ 3)℄2 = [2x+ 6℄2 :Umgekehrt gilt jedo h f( x+ b) = [2x+ 3℄2 :2.2.4 Allgemeine KompositionenIm letzen Kapitel haben wir zusammengesetzte Funktionen betra htet, in deneneine neue Funktion dur h Vers hiebung oder Skalierung aus einer bekannten Funk-tion hervorging. So wurde beispielsweise die unabh�angige Variable um einen festenBetrag vergr�o�ert oder mit einem festen Faktor multipliziert und erst na h dieserersten Operation als Argument einer Funktion verwendet.Verallgemeinert man diese Idee, so kann man au h Funktionen von Funktionenbetra hten:De�nition (Komposition von Funktionen):Als Komposition zweier reeller Funktionen f und g wird die Hintereinander-ausf�uhrung x ! g(f(x)) bezei hnet. Diese Funktion, die jedem x den Wertg(f(x)) zuordnet, wird oft mit g Æ f bezei hnet, das hei�t (g Æ f)(x) = g(f(x)).BEMERKUNG: Na h der obigen De�nition gilt im Allgemeinen: g Æ f 6= f Æ g und(g Æ f)(x) 6= g(x) � f(x).BEISPIEL:Mit f(x) = x+ a und g(x) = x2 erhalten wir(g Æ f)(x) = (x+ a)2 ;(f Æ g)(x) = x2 + a undg(x) � f(x) = x3 + ax2 :2.3 Einfa he spezielle Funktionen2.3.1 Lineare FunktionenDie lineare Funktion y = mx+ b (2.16)stellt eine Gerade mit dem Anstieg m dar, die die y-A hse im Punkt b s hneidet.

2.3. EINFACHE SPEZIELLE FUNKTIONEN 23b
1
m
y=mx+b
x
y
Abbildung 2.8: Graph der Geradenglei hung y = mx+ b.2.3.2 Quadratis he FunktionenDie einfa hste quadratis he Funktion lautety = x2 (2.17)und stellt eine na h oben ge�o�nete Parabel mit dem S heitelpunkt (0; 0) dar.
-3
-2
-1
0
1
2
y
-3 -2 -1 0 1 2 x
y=x2
Abbildung 2.9: Die Parabel y = x2.Die allgemeine quadratis he Funktiony = ax2 + bx+ mit a; b; 2 R (2.18)l�a�t si h f�ur a 6= 0 dur h quadratis he Erg�anzung auf die Formy = a�x+ b2a�2 � Da mit D = b24 � a (2.19)

24 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGbringen, wobei die Gr�o�e D als Diskriminante bezei hnet wird.SELBSTTEST: �Uberpr�ufen Sie diese Umformung indem Sie den quadratis henTerm in Glei hung (2.19) explizit ausre hnen.Der gro�e Vorteil von (2.19) gegen�uber (2.18) besteht zum einen darin, dass wir(2.19) lei ht na h x au �osen k�onnen, wovon im n�a hsten Abs hnitt Gebrau h ge-ma ht wird. Zum anderen kann man an Glei hung (2.19) au h direkt die Vers hie-bung und Stre kung ablesen: na h den Ergebnissen der letzten Kapitel stellt Glei- hung (2.19) n�amli h eine um den Faktor a in y-Ri htung gestre kte Parabel dar,deren S heitel im Punkt (�b=2a;�D=a) liegt.(a)D/a
-b/2a
y=a(x+b/2a)2+D/a
x
y (b)D/a
-b/2a
y=a(x+b/2a)2+D/a
x
y
Abbildung 2.10: Graphen der allgemeinen quadratis hen Funktion y = ax2+ bx+ mit(a) a > 0 und (b) a < 0.2.4 Quadratis he Glei hungenIm letzten Abs hnitt haben wir die allgemeine quadratis he Funktion y = ax2+bx+ betra htet. In unz�ahligen Anwendungen tri�t man auf das Problem, die Nullstellendieser Funktion zu �nden, das hei�t diejenigen x-Werte, f�ur die ax2 + bx + = 0gilt. Man su ht also na h reellen L�osungen der quadratis hen Glei hungax2 + bx+ = 0 a 6= 0 : (2.20)SELBSTTEST: Warum wurde in Glei hung (2.20) a 6= 0 gesetzt?Glei hung (2.19) zeigt, dass die Su he na h reellen L�osungen der quadratis henGlei hung (2.20) f�ur negative Diskrimanten D ni ht gelingen kann. Ist in diesemFall n�amli h a positiv, so ist der Term a[x + b=(2a)℄2 ni ht-negativ, und der Term�D=a ist positiv. Damit muss y f�ur alle x positiv sein. Ist umgekehrt a negativ, soist der Term a[x + b=(2a)℄2 ni ht-positiv, und der Term �D=a ist negativ. Damitmuss y nun f�ur all x negativ sein. In beiden F�allen existiert also keine Nullstelle.Falls D jedo h ni ht-negativ ist, so kann Glei hung (2.20) na h x aufgel�ost werden.Ingesamt erh�alt man:

2.4. QUADRATISCHE GLEICHUNGEN 25Satz (L�osungen der quadratis hen Glei hung):Die quadratis he Glei hung ax2 + bx+ = 0 besitzt f�ur a 6= 0 die L�osungenx1=2 = �b�p4D2a = �b�pb2 � 4a 2a : (2.21)Drei F�alle sind zu unters heiden:Fall 1: D > 0. Es existieren zwei vers hiedene L�osungen x1 6= x2.Fall 2: D = 0. x1 und x2 fallen zusammen, so dass genau eine L�osung existiert.Fall 3: D < 0. Es existieren keine reellen L�osungen.Bezogen auf den Graphen der quadratis hen Funktion (2.18) entspre hen diese dreiF�alle den drei m�ogli hen vers hiedenen geometris hen Situationen | zwei, ein oderkein S hnittpunkt der Parabel mit der x-A hse.BEMERKUNG: Die aus der S hule bekannte p; q-Formel erh�alt man im Spezialfalla = 1, wenn man p = b und q = setzt. Es gilt also:Satz (L�osungen der quadratis hen Glei hung in p; q-Form):Die quadratis he Glei hung x2 + px+ q = 0 besitzt die L�osungenx1=2 = �p2 �r�p2�2 � q : (2.22)Die Diskriminante lautet nun D = p24 � q.BEISPIELE:Die Glei hung x2 � 2x� 15 besitzt die beiden Nullstellenx1=2 = 1�p1 + 15 = 1� 4 ;d. h. x1 = �3; x2 = 5.Die Glei hung x2�2x+1 = 0 besitzt die Nullstelle x1=2 = 1�p1� 1 = 1.Die Glei hung x2 + 1 = 0 besitzt keine reelle Nullstelle.(a)x1 x2
(b)x1=x2
( )Abbildung 2.11: Die allgemeine quadratis he Funktion besitzt (a) zwei Nullstellen, wenndie Diskriminante D gr�o�er als Null ist, (b) genau eine Nullstelle, wenn D Null ist und ( )keine Nullstelle, wenn die Diskriminante kleiner Null ist.BEMERKUNG: Um Glei hung (2.20) au h f�ur D < 0 l�osen zu k�onnen, werden wirin einem sp�ateren Kapitel die sogenannten komplexen Zahlen einf�uhren.

26 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNG2.5 Aufgaben1. (Funktionen) Skizzieren Sie folgende Funktionen f : R! R:(a) f(x) = x(b) f(x) = 2x( ) f(x) = x=2(d) f(x) = 2x+ 3 (e) f(x) = �2x+ 3(f) f(x) = 2x� 3(g) f(x) = �2x� 3(h) f(x) = x2 (i) f(x) = 2x2(j) f(x) = x2=2(k) f(x) = x3(l) f(x) = 1=x2. (quadratis he Glei hungen) L�osen Sie na h x auf:(a) (x� 2)2 = 0(b) 2(x+ 3)2 = 8( ) (x� 1)(x+ 2) = 0 (d) x(x � 1) = 0(e) x2 + 2x = 0(f) 4x2 � 3x = 0 (g) x2 + 2x� 3 = 0(h) x2 = 3x+ 4(i) 12x2 + x = 33. (quadratis he Glei hung) Eine Stre ke soll so geteilt werden, da� der k�urzereTeil si h zu dem l�angeren Teil so verh�alt, wie der l�angere Teil zur ganzen Stre ke.Wie lang ist der l�angere Teil relativ zur ganzen Stre ke? Dieses Verh�altnis wirdGoldener S hnitt genannt.4. (S heitelpunktglei hung) Wo liegt der S heitel folgender Parabeln? Sind dieParabeln na h oben oder na h unten ge�o�net?(a) f(x) = 2(x+ 3)2 � 2(b) f(x) = x2 + 2x( ) f(x) = �4x2 + 12x(d) f(x) = x2 + 2x� 3 (e) f(x) = �2x2 + 6x+ 4(f) f(x) = (x � 2)(x� 4)(g) f(x) = 2(x� 3)(x+ 5)(h) f(x) = x(x � 1) + 25. (Beispiel aus der Physik: Wurfparabel) Wird am Ort x0 = 0 ein Ball in die Luftgeworfen, dann entspri ht (bei Verna hl�assigung der Luftreibung) seine Bewegungfolgender Parabel: h(x) = vyvxx� 12 gv2xx2 (2.23)Darin ist g die Erdbes hleunigung, vx 6= 0 die horizontale und vy die vertikaleGes hwindigkeitskomponente beim Loslassen des Balls. h(x) ist die H�ohe des Ballsh in Abh�angigkeit vom Ort x.(a) Wel he H�ohe errei ht der Ball maximal? Wie weit ist er bis dahin ge ogen?(b) Wie weit iegt der Ball insgesamt?( ) Fertigen Sie eine Skizze der Wurfbahn an!6. (Beispiel aus der Populations�okologie) Eine Population von z.B. Fru ht iegenbestehe aus N Individuen. Die Anzahl der neugeborenen Fliegen pro Tag sei propor-tional zur Anzahl der Indviduen:Nb = rN . Dabei ist r die Geburtenrate. Die Anzahlder gestorbenen Tiere pro Tag Nd ist auf Grund von Nahrungsmangel bei zu gro�en

2.5. AUFGABEN 27Populationen gr�o�er als allein dur h das Sterben alter Tiere. Dies kann in seinereinfa hsten Form dur h eine quadratis he Abh�angigkeit von der Populationsgr�o�eber�u ksi htigt werden: Nd = aN2. Darin ist a 2 R+ ein geeigneter Proportiona-lit�atsfaktor. Bei wel her Populationsgr�o�eN wird die Anzahl der Geburten pro Taggenau dur h die Todesf�alle ausgegli hen?7. (Umkehrfunktion) Wie lauten die Umkehrfunktionen folgender Funktionen? F�urwel he x sind die Funktionen bzw. ihre Umkehrfunktionen �uberhaupt de�niert?(a) y = 2(x+ 3)2 � 2(b) y = �2x2 + 6x+ 4 ( ) y = 3px� 2(d) y =px2 + 48. (Umkehrfunktionen)(a) Wel he Geraden y = mx+ b sind identis h mit ihrer Umkehrfunktion?(b) Wel he Hyperbeln y = x�a + b sind identis h mit ihrer Umkehrfunktion?9. (Komposition von Funktionen) Um s hnell einen Eindru k von dem Ausseheneiner zusammengesetzten Funktion wie z.B. f(x) = qsin2(x) + 1 zu bekommen,ohne die Funktion glei h zu diskutieren zu m�ussen, sollte man si h einfa h S hrittf�ur S hritt klar ma hen, was diese Funktion ma ht. Also:(a) Wie sieht y = sin(x) aus?(b) Was passiert mit sin(x), wenn seine Funktionswerte quadriert werden?( ) Was bewirkt das +1 ?(d) Wie wirkt si h s hlie�li h die Wurzel darauf aus?Verans hauli hen Sie si h in glei her Weise die beiden Funktioneng(x) = 1x2 + 2 und h(x) = (ex � 1)2 !10. (Komposition von Funktionen) Skizzieren Sie die Funktion f : R+ ! R; x 7!(x + 1)e�4x. �Uberlegen Sie si h dazu die Form der einzelnen Komponenten dieserFunktion. Wel hen De�nitionsberei h, wel he Ziel- und Wertemenge hat die Funk-tion? Ist sie injektiv und/oder surjektiv? Kann man f umkehren?11. (Komposition von Funktionen) Skizzieren Sie die Graphen der Funktionenf(x) = �x3 + 4x und g(x) = 12x4 � 2x2! �Uberlegen Sie si h dazu, wie si h dieFunktionen f�ur sehr gro�e und sehr kleine Werte von x verhalten, und bere hnenSie die Nullstellen. Sie sollen ni ht die Lage eventueller Extremstellen bere hnen!Skizzieren Sie au�erdem den Graphen der Gau�funktion f(x) = e�x2 . Kann dieseFunktion Nullstellen haben?12. (Beispiel aus der Neurobiologie) In den Membranen von Zellen sind Ionen-pumpen eingebaut, die bestimmte Ionensorten dur h die Membran pumpen. Da-dur h ist z.B. die Konzentration von Kalium-Ionen innerhalb der Zelle um daszwanzigfa he h�oher als im extrazellul�aren Medium. Die Natrium-Konzentration

28 KAPITEL 2. FUNKTIONEN UND IHRE GRAPHISCHE DARSTELLUNGist dagegen au�erhalb der Zelle um das f�unfzehnfa he gr�o�er als innerhalb. Wei-terhin gibt es Ionenkan�ale, die spezi�s h bestimmte Ionensorten dur h die Mem-bran ie�en lassen. Wenn nur Ionenkan�ale in die Zellmembran eingebaut sind, dief�ur Kalium-Ionen dur hl�assig sind, dann stellt si h bei dem sogennanten Kalium-Glei hgewi htspotential EK ein Glei hgewi ht zwis hen dem dur h den Konzen-trationsunters hied hervorgerufenen Ionen-R�u k u� und dem diesen entgegenwir-kenden elektris hen Feld ein, wel hes si h dur h den Ionen u� aufbaut. F�ur dasGlei hgewi htspotential der Ionensorte X gilt allgemein die Nernst's he FormelEX = 58mV� log10 [X ℄o[X ℄i ; (2.24)wobei [X ℄i die Ionenkonzentration innerhalb der Zelle und [X ℄o die Ionenkonzen-tration au�erhalb der Zelle ist.(a) Wo liegen die Glei hgewi htspotentiale von Kalium und Natrium (EK undENa)?F�ur den elektris hen Strom I , den die Ionen beim Dur h ie�en eines Kanals verur-sa hen, gilt n�aherungswei�e das Ohms he Gesetz:I = g(V �E) : (2.25)Dabei ist V die elektris he Spannung, die �uber der Membran anliegt, g die Leitf�ahig-keit des Kanals, dur h den die Ionen ie�en (der Widerstand ist R = 1=g) und Edas Glei hgewi htspotential der entspre henden Ionensorte.Skizzieren Sie die Strom-Spannungskennlinien (d.h. I(V )) f�ur folgende F�alle; zei h-nen Sie f�ur (b), ( ), (d), (e) jeweils ein Diagramm):(b) In einem Membranst�u k seien ein, zwei oder drei Kan�ale ge�o�net. Im o�enenZustand haben die Kan�ale alle die glei he konstante Leitf�ahigkeit von jeweilsg. Ihr Glei hgewi htspotential sei bei 0 mV (3 Kurven). Bea hten Sie: DieLeitf�ahigkeit von parallel ges halteten Kan�alen addiert si h.( ) Zwei Ionenkan�ale haben die glei he Leitf�ahigkeit g aber unters hiedli he Glei h-gewi htspotentiale. Der erste Kanal hat ein negatives Glei hgewi htspotentialE1 (z.B. das von Kalium EK), der zweite ein positives E2 (z.B. das von NatriumENa) (2 Kurven).(d) Die beiden Kan�ale aus ( ) haben nun eine spannungsabh�angige Leitf�ahigkeit:Unterhalb einer Spannung Vg (E1 < Vg < E2) sei die Leitf�ahigkeit beiderKan�ale klein, dar�uber �andert sie si h sprunghaft auf einen gr�o�eren Wert, d.h.ab der Spannung Vg �o�nen si h die Kan�ale. In Neuronen spielen sol he Kan�aleeine wi htige Rolle bei der Erzeugung von Aktionspotentialen (au h Spikesgenannt). Das sind pulsartige Entladungen mit denen die Neurone miteinanderkommunizieren. (2 Kurven).(e) Nun soll si h die Leitf�ahigkeit der beiden Kan�ale ni ht sprunghaft wie in (d)sondern allm�ahli h vom niedrigen zum hohen Wert �andern. Au�erdem soll si hdie Leitf�ahigkeit einmal bei niedriger (a) und einmal bei etwas h�oherer (b)Spannung �andern (4 Kurven).

Kapitel 3Potenzen und verwandteFunktionenBiologis h relevante Zahlen k�onnen ras h sehr unhandli h werden. So besteht bei-spielsweise das Genom des Mens hen aus ir a 3000000000Basenpaaren, das mens h-li he Gehirn enth�alt mehr als 100000000000 Nervenzellen, die mit insgesamt un-gef�ahr 100000000000000 Synapsen verbunden sind | ganz zu s hweigen von derZahl der Molek�ule in einem Organismus.Um mit derart gro�en Zahlen ras h und si her umgehen zu k�onnen, s hreibt mankompakt 100 = 10 � 10 = 102, 1000 = 10 � 10 � 10 = 103, 10000 = 104 et . In diesenBeispielen wird die Zahl 10 als Basis bezei hnet, die ho hgestellte Zahl 2, 3, 4 alsExponent. Mit diesen De�nitionen ist eine kurze und �ubersi htli he S hreibweisegefunden: das Genom des Mens hen besteht aus ir a 3 � 109 Basenpaaren, dasGehirn aus gut 1011 Neuronen und 1014 Synapsen und selbst die ges h�atzte Zahlder Atome im Weltall ers heint mit 1080 no h halbwegs \greifbar".Neben der Basis 10 spielen au h andere Basen eine wi htige Rolle in Te hnik undWissens haft | beispielsweise die Zahl 2 bei der De�nition von bits und bytes.Wir werden deshalb zu Beginn des Kapitels den mathematis hen Begri� der Potenzpr�azise de�nieren. Mittels dieses neuen Handwerkszeugs erhalten wir wi htige neueFunktionstypen. Zum einen die Potenzfunktionen wie y = x2 und Polynome wiey = x4+3x. Bei ihnen ist die Basis variabel, der Exponent jedo h fest. Beim zweitenTyp, den Exponentialfunktionen, ist hingegen die Basis fest und der Exponentvariabel. Das wi htigste Beispiel ist hier die Exponentialfunktion zur Basis e, f(x) =ex. Zu beiden Funktionstypen lassen si h Umkehrfunktionen de�nieren. Man erh�altso die Wurzelfunktionen und Logarithmusfunktionen.Am Ende des Kapitels geben wir mit dem Binomis hen Lehrsatz no h eine Ver-allgemeinerung der aus der S hule bekannten Binomis hen Formeln an. In diesemZusammenhang werden au h die ni ht zuletzt in der Statistik wi htigen Begri�eFakult�at und BinomialkoeÆzient eingef�uhrt.
29

30 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONEN3.1 Einfa he Potenzen und Wurzeln3.1.1 Potenzen nat�urli her ZahlenDe�nition (Potenzen nat�urli her Zahlen):Sei a 2 R und n 2 N. Dann de�niert man die Potenz der Basis a zumExponenten n dur h: a1 = aan+1 = a � an (3.1)= a � : : : � a| {z }(n+1)�malBEMERKUNG: Eine sol he r�u kbez�ugli he De�nition einer Gr�o�e xn+1 dur h dies hon bekannte Gr�o�e xn nennt man rekursiv.Mit dem Begri� der Potenz erhalten wir eine ganze Reihe neuer Funktionen.3.1.2 PotenzfunktionDe�nition (Potenzfunktion):Sei n 2 N mit n � 2. Eine Potenzfunktion ist eine Funktion f : R! R; x 7!f(x) = y der Form y = xn : (3.2)
-3
-2
-1
0
1
2
y
-3 -2 -1 0 1 2 x
y=x2
y=x4
-3
-2
-1
0
1
2
y
-3 -2 -1 0 1 2 x
y=x3
y=x5
Abbildung 3.1: Potenzfunktionen mit n = 2, 4 (links) und n = 3, 5 (re hts).Das Symmetrieverhalten von Potenzfunktionen ist sehr �ubersi htli h. F�ur geradesn ist eine Potenzfunktion eine gerade Funktion wie die Quadratfunktion y = x2,f�ur ungerades n ist eine Potenzfunktion eine ungerade Funktion wie die Funktioneny = x oder y = x3.Weiterhin haben alle Potenzfunktionen der Form (3.2) an der Stelle x = 1 den Werty = 1. Potenzfunktionen mit geradem n haben an der Stelle x = �1 ebenfalls den

3.2. POLYNOME 31Wert y = 1, Potenzfunktionen mit ungeradem n haben an der Stelle x = �1 denWert y = �1.S hlie�li h gilt: Je gr�o�er n ist, um so geringer ist der Abstand des Graphen vonf von der x-A hse f�ur �1 < x < 1, und um so s hneller entfernt si h die Funktionvon der x-A hse f�ur x > 1 beziehungsweise x < �1.3.1.3 WurzelfunktionF�ur ungerade n ist die Potenzfunktion y = xn auf ganz R invertierbar, f�ur geraden jedo h nur auf R+0 oder R�0 . �Ubli herweise betra htet man dabei den Fall R+0 .Die Umkehrfunktion wird Wurzelfunktion genannt:De�nition (Wurzelfunktion):Sei n 2 N. EineWurzelfunktion ist eine Funktion f : R+0 ! R; x 7! f(x) = yder Form y = npx : (3.3)
0
0.5
1
1.5
2
2.5
y
0 0.5 1 1.5 2 2.5 x
x
x1/2
x1/4
x1/10
x0=1
Abbildung 3.2: Wurzelfunktionen f�ur vers hiedene n. (Bem: x1=n := npx)3.2 PolynomeDe�nition (Polynome):Sei n 2 N. Ein Polynom vom Grad n ist eine Funktion f : R ! R; x 7!f(x) = y der Form y = nX�=0 a�x� ; a� 2 R (3.4)= a0 + a1x+ a2x2 + : : :+ anxn ;bei der der KoeÆzient an ni ht Null ist.

32 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENBEMERKUNG: KoeÆzienten a� mit � < n d�urfen vers hwinden. Der Grad desPolynoms bemisst si h allein na h der h�o hsten auftretenden Potenz.BEISPIELE:Die Funktion y = 2x4 + x5 ist ein Polynom f�unften Grades.Die Funktion y = �x3 + x ist ein Polynom dritten Grades.Die Potenzfunktion y = x8 ist ein Polynom a hten Grades.Polynome spielen in der Mathematik eine wi htige Rolle. Mit ihnen kann man�uberaus komplexe Ph�anomene bes hreiben. Das kann man jedo h au h mit anderenFunktionstypen. Das Besondere an Polynomen ist, dass sie einfa h zu handhabensind. So lassen si h Polynome beispielsweise sehr einfa h di�erenzieren und integrie-ren.Da man Polynome so gut im Gri� hat, analysiert man komplizierte Funktionenbeispielsweise indem man sie dur h Polynome approximiert. Wir werden darauf imKapitel �uber Taylorreihen n�aher eingehen.Von besonderer Bedeutung ist die Nullstellenbestimmung von Polynomen. So l�a�tsi h das L�osen der au h in der Biologie wi htigen, hier no h ni ht behandelten li-nearen Di�erenzen- und Di�erentialglei hungen auf die Bestimmung von Nullstelleneines Polynoms reduzieren. Wir werden dies in einem sp�ateren Kapitel im Detailbehandeln.3.3 Potenzen mit beliebigen reellen ExponentenBisher haben wir als Exponenten nur nat�urli he Zahlen erlaubt. Wir wollen diesnun verallgemeinern:De�nition (Potenzen mit ganzzahligem Exponenten):Sei n 2 N und a 2 R. Dann setzen wira�n = 1an f�ur a 6= 0 (3.5)a0 = 1: (3.6)Potenzen mit ganzzahligen Exponenten: Potenzfunktionen mit negativem Ex-ponenten sind f�ur a = 0 ni ht de�niert. In der N�ahe dieser De�nitionsl�u ke werdendie Funktionswerte betragsm�a�ig beliebig gro�. Man spri ht von einer Polstelle.Qualitativ �ahnelt die Funktion y = x�n bei geradem n der Funktion y = x�2 undbei ungeradem n der Funktion y = x�1.De�nition (Potenzen mit rationalen Exponenten):Sei a > 0 und r = p=q mit p 2 Z und q 2 N. Dann setzen wirar = a pq = qpap : (3.7)

3.3. POTENZEN MIT BELIEBIGEN REELLEN EXPONENTEN 33
-3
-2
-1
0
1
2
y
-3 -2 -1 0 1 2 x
x-1
x-2
x-3
x-4
x-1
x-3
x-2
x-4
Abbildung 3.3: Hyperbeln | Potenzfunktionen mit negativem n.BEMERKUNG: Diese Erweiterung auf beliebige rationale Exponenten ist nur f�ura � 0 m�ogli h. Der Grund liegt darin, dass es keine reelle Zahl gibt, die die Qua-dratwurzel einer negativen Zahl ist.Potenzfunktionen mit rationalen Exponenten: Funktionen der Form y =xr mit r 2 Q s hlie�en neben den Potenzfunktionen mit ganzen Zahlen au h dieWurzelfunktionen ein. Diese Vereinheitli hung ist sehr praktis h. Je na h dem Wertvon r kann dabei der De�nitionsberei h ganz R, Rnf0g (die reellen Zahlen ohne dieNull), R+0 oder au h nur R+ sein.Potenzen mit reellen Exponenten: F�ur die `no h verbleibenden' irrationalenExponenten z 2 R de�niert man die Potenz az , indem man z s hrittweise dur hrationale Zahlen z ann�ahert. F�ur diese ist die Potenz ja s hon de�niert! DieserVorgang einer s hrittweisen Ann�aherung ist in der Mathematik ganz allgemein vongr�o�ter Bedeutung und wird Grenzwertproze� genannt. Wir werden ihn ab Kapitel5 eingehend diskutieren.Potenzfunktionen mit reellem Exponenten: Funktionen der Form y = xrmit r 2 R werden wie Potenzen mit reellen Exponenten gewonnen.Insgesamt haben wir nun Potenzen f�ur beliebige reelle Exponenten und positivereelle Basen eingef�uhrt. F�ur diese gelten die aus der S hule bekannten Potenzgesetze.

34 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENPotenzgesetze:F�ur positive reelle Zahlen x; y und reelle Zahlen v; w gilt:xv � xw = xv+w (3.8)xv � yv = (x � y)v (3.9)xvyv = �xy�v (3.10)(xv)w = xv�w (3.11)x�v = 1xv (3.12)BEMERKUNG: Unter der Voraussetzung, dass v und w ganze Zahlen sind, geltendiese Gesetze au h f�ur beliebige reelle Zahlen x; y.3.3.1 Mathematik und Biologie: SkalengesetzeMit den jetzt bekannten Begri�en kann man einige au h biologis h interessante Fra-gen beantworten. Wie stark w�a hst beispielsweise die Ober �a he einer Zelle, wennsi h ihr Dur hmesser um ein Prozent vergr�o�ert? Wie ver�andert si h ihr Volumenund wie das f�ur viele Prozesse wi htige Ober �a hen{zu{Volumen Verh�altnis?L�osung: Wenn der Zelldur hmesser um ein Prozent w�a hst, dann w�a hst die Ober- �a he relativ zur Ausgangssituation auf den Wert 1:01 � 1:01 = 1:012, das Zell-volumen auf 1:013. Diese Zahlen k�onnen wir lei ht per Tas henre hner oder mitPapier und Bleistift bere hnen. Wir erhalten f�ur die Ober �a he den Faktor 1:0201,f�ur das Volumen 1:030301. Das Ober �a hen-zu-Volumen Verh�altnis hat si h auf1:012=1:013 = 1:01(2�3) = 1:01�1 � 0:99 verringert. Dieses Ergebnis h�atte manf�ur allgemeine Gr�o�enver�anderungen au h direkt aus folgender �Uberlegung s hlu�-folgern k�onnen: Die Ober �a he O eines \gew�ohnli hen" K�orpers skaliert wie dasQuadrat x2 seiner linearen Ausdehnung x, sein Volumen V wie x3. Damit skaliertdas Ober �a hen-zu-Volumen Verh�altnis wie x2=x3 = x(2�3) = x�1.Allerdings existieren au h Objekte mit einem auf den ersten Bli k ungew�ohnli hemSkalierungsverhalten. Dazu geh�oren Objekte, die auf allen Gr�o�enskalen �ahnli heStrukturen zeigen | beispielsweise baumartige Strukturen (n�aherungsweise tri�tdies auf Nervenzellen und das Blutgef�a�system zu), K�ustenlinien oder Galaxienver-teilungen im Weltall. Die Selbst�ahnli hkeit dieser fraktalen Objekte entspri hteinem Skalierungsverhalten mit Exponenten, die keine ganzen Zahlen sind.Weitere Beispiele: Wie skaliert die Gr�o�e des Gehirns (oder au h: maximales Alter,Herzs hlagrate, metabolis he Aktivit�at) in Abh�angigkeit von der K�orpergr�o�e? Wiew�a hst die Photosyntheseleistung eines Baumes in Abh�angigkeit von seiner Gr�o�e?Bei der Analyse derartiger Fragen st�o�t man oft auf einfa hes Potenzverhalten,systematis he Abwei hungen bei einer bestimmten Spezies davon k�onnen als Indizbesonderer evolution�arer Entwi klungen interpretiert werden.

3.4. EXPONENTIALFUNKTION UND LOGARITHMUS 353.4 Exponentialfunktion und Logarithmus3.4.1 ExponentialfunktionBei den in Glei hung (3.2) eingef�uhrten Potenzfunktionen war die Basis x die un-abh�angige Variable, der Exponent n ein fest gew�ahlter Parameter.Nun wollen wir uns umgekehrt mit Funktionen wie y = 2x, y = 10x, y = ex, oderallgemein y = ax mit a 2 R+ bes h�aftigen, also die (positive) Basis a festhalten aberden Exponenten x variieren. Diese Funktionen werden als Exponentialfunktionenbezei hnet. Dabei ist die Basis a > 0 zu w�ahlen | der Ausdru k (�1)1=2 ist jabeispielsweise in den reellen Zahlen gar ni ht de�niert!Notiz:Bei Potenzfunktionen ist die Basis variabel und der Exponent konstant.Bei Exponentialfunktionen ist die Basis konstant und der Exponent variabel.Wie wir in K�urze sehen werden, zeigen Wa hstums- und Zerfallsprozesse expo-nentielles Verhalten. Exponentialfunktionen sind deshalb von gr�o�ter Bedeutung inder Biologie.De�nition (Exponentialfunktion zur Basis a):F�ur a; x 2 R, a > 0 bezei hnet man die Funktionf(x) = ax (3.13)als Exponentialfunktion zur Basis a.Die Exponentialfunktion zur Basis e = 2:718282 : : : (der Eulers hen Zahl),nennt man kurz Exponentialfunktion und s hreibt oft au h:ex = exp(x) : (3.14)1
y=ax
10x
2x
1x
(1/2)x
(1/10)x
x
y
Abbildung 3.4: Exponentialfunktion f(x) = ax f�ur vers hiedene Parameter a

36 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENOhne Beweis geben wir no h einige wi htige Eigens haften von Exponentialfunkio-nen an:Eigens haften von Exponentialfunktionen:Sei a; b 2 R, a; b > 0 und x; y 2 R. Dann gilt:(1) Die Exponentialfunktion zur Basis a ist f�ur a > 1 streng monoton wa hsend,und f�ur 0 < a < 1 streng monoton fallend.(2) Wegen der Monotonie ist die Exponentialfunktion zur Basis a f�ur a 6= 1umkehrbar. Ihre Umkehrfunktion hei�t Logarithmus und wird im n�a hstenAbs hnitt bespro hen.(3) Aufgrund der Potenzgesetze (3.8) - (3.12) gilt:ax > 0 (3.15)ax � ay = ax+y (3.16)ax � bx = (ab)x (3.17)axbx = �ab�x (3.18)3.4.2 LogarithmusDie Exponentialfunktion zur Basis a > 0 ist f�ur a > 1 streng monoton wa hsendf�ur 1 > a > 0 streng monoton fallend. Die Exponentialfunktion zur Basis a > 0 istdeshalb f�ur alle positiven a 6= 1 umkehrbar. Der De�nitionsberei h der Exponenti-alfunktion zur Basis a > 0 ist R, ihr Werteberei h R+, die Menge aller positivenreellen Zahlen. Damit kann man auf R+ die Umkehrfunktion der Exponentialfunk-tion zur Basis a > 0 de�nieren, den Logarithmus zur Basis a:
-3
-2
-1
0
1
2
y
0 1 2 e 4 6 8 10 x
ln(x)
lg(x)
Abbildung 3.5: Nat�urli her Logarithmus, f(x) = ln(x) = loge(x), und Logarithmus zurBasis 10, d.h. f(x) = lg(x) = log10(x).De�nition (Logarithmus zur Basis a):Sei a 2 R, a > 0. Dann ist f�ur x > 0 der Logarithmus zur Basis a alsUmkehrfunktion der Exponentialfunktion zur Basis a de�niert,y = loga(x) () x = ay : (3.19)

3.4. EXPONENTIALFUNKTION UND LOGARITHMUS 37De�nition:Der Logarithmus zur Basis e hei�t nat�urli her Logarithmus und wird mitln(x) = loge(x) (3.20)bezei hnet.F�ur den Logarithmus zur Basis 2, den Logarithmus dualis, s hreibt man oftld(x) = log2(x) ; (3.21)beim Logarithmus zur Basis 10, dem dekadis her Logarithmus, l�a�t manh�au�g den Index weg und k�urzt man hmal au h mit \lg" ab,log(x) = lg(x) = log10(x) : (3.22)BEMERKUNG: Die Notation \log" (ohne Index) wird man hmal au h f�ur dennat�urli hen Logarithmus verwendet. Vorsi ht! Verwe hslungsgefahr!Als Umkehrfunktion der Exponentialfunktion gilt f�ur den Logartithmusaloga(x) = x f�ur a > 0; a 6= 1; x > 0 (3.23)und loga(ax) = x f�ur a > 0; a 6= 1 : (3.24)Von der Exponentialfunktion `erbt' der Logarithmus die folgenden Eigens haften:Eigens haften der Logarithmen:F�ur x; y; a 2 R+, a 6= 1, z 2 R gilt:loga(1) = 0 [weil a0 = 1℄ (3.25)loga(a) = 1 [weil a1 = a℄ (3.26)loga(x � y) = loga(x) + loga(y) (3.27)loga�xy� = loga(x) � loga(y) (3.28)loga(xz) = z loga(x) (3.29)insbesondere f�ur z = �1: loga� 1x� = � loga(x) (3.30)Herleitung von Glei hung (3.27):Wegen Glei hung (3.23) gilt x = aloga(x), y = aloga(y) und xy = aloga(xy). Multi-pliziert man die linken Seiten der ersten beiden Glei hungen so folgt xy = aloga(x) �aloga(y) = aloga(x)+loga(y). Damit gilt insgesamt: aloga(xy) = aloga(x)+loga(y). Daf�ur a 6= 1 die Exponentialfunktion zur Basis a streng monoton und damit bijektivist, folgt aus a = ad sofort = d, auf unser Beispiel angewendet also (3.27). 2Herleitung von Glei hung (3.29):Wegen Glei hung (3.23) gilt x = aloga(x) und xy = aloga(xy). Mit Hilfe der Regelnf�ur Potenzen folgt dann xy = [aloga(x)℄y = ay loga(x). Wie im letzten Beweis erh�altman mit Hilfe der strengen Monotonie daraus die Behauptung. 2

38 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENGlei hung (3.28) folgt dann aus (3.27), (3.29) und (3.30). 23.4.3 Umre hnung zwis hen vers hiedenen BasenMit Hilfe des Logarithmus kann man die Frage beantworten, wie Exponentialfunk-tionen vers hiedener Basis miteinander zusammenh�angen. Seien beispielsweise inax = by (3.31)die Gr�o�en a, b und x bekannt, so kann man die Unbekannte y dadur h �nden, dassman von beiden Seiten der Glei hung den Logarithmus zur Basis b nimmt,logb(ax) = logb(by) : (3.32)Mit den Glei hungen (3.26) und (3.29) erhalten wirx logb(a) = y : (3.33)Setzt man (3.33) in die re hte Seite von (3.31) ein, so folgt au h der allgemeineZusammenhang ax = b x mit = logb(a) : (3.34)Ans hauli h bedeutet (3.34), dass die Graphen der Exponentialfunktionen dur hStau hung beziehungsweise Stre kung der x-A hse um den Faktor auseinanderhervorgehen | siehe Abbildung 3.4.Von besonderer Bedeutung ist diese Umformung bei der Umre hnung von Expo-nentialfunktionen zur Basis 2, e und 10. �Uben Sie dies an einigen Beispielen.In glei her Weise tri�t man oft auf das Problem, Logarithmen unters hiedli herBasis ineinander umzure hnen. Ist beispielsweise y aus der Glei hunglogb(y) = loga(x) (3.35)zu bestimmen, so \exponentiert" man beide Seiten von (3.35) und erh�altblogb(y) = bloga(x) (3.36)oder y = bloga(x) : (3.37)Wi htig ist s hlie�li h au h no h der Zusammenhang von Logarithmen einer Zahlx bez�ugli h vers hiedener Basen a und b,loga(x) = loga(b) � logb(x) = 1logb(a) � logb(x) : (3.38)Diese Glei hung sagt ni hts anderes, als dass die vers hiedenen Logarithmen zuein-ander proportionale Funktionen sind | siehe au h Abbildung 3.5. Deshalb gen�ugtes, auf Tas henre hnern nur eine spezielle Basis f�ur den Logarithmus vorzusehen!Beweis von Glei hung (3.38):Wegen Glei hung (3.29) gilt loga(b) � logb(x) = loga �blogb(x)� = loga(x). Die zweiteGlei hung geht aus der ersten dur h Vertaus hung von a und b hervor. 2

3.4. EXPONENTIALFUNKTION UND LOGARITHMUS 393.4.4 Mathematik und Biologie: Exponentieller ZerfallVerringert si h die Menge x einer Substanz proportional zur gerade vorhandenenMenge, so ist x als Funktion der Zeit t dur h eine Exponentialfunktion der Formx(t) = x0 exp(��t) (3.39)gegeben, wobei x0 die zur Zeit t = 0 vorhandene Menge bezei hnet, und � dieZerfallskonstante des betra hteten Prozesses.Wir werden dieses Ergebnis im Kapitel �uber lineare Di�erentialglei hungen mathe-matis h herleiten, wollen aber s hon jetzt das L�osungsverhalten von (3.39) disku-tieren. Exponentielle Zeitabh�angigkeiten spielen n�amli h ni ht nur beim Studiumradioaktiver Umwandlungen eine fundamentale Rolle. Sie sind vielmehr harakte-ristis h f�ur unz�ahlige Prozesse in denen si h eine dynamis he Variable1 proportio-nal zu ihrem gegenw�artigen Wert verringert. Beispiele sind elektris he Ausglei hs-vorg�ange an der Zellmembran von Nervenzellen oder die Kinetik vieler einfa her(bio) hemis her Reaktionen.Das Argument der Exponentialfunktion in (3.39) ist das Produkt von Zerfallskon-stante � und Zeit t. Ein bestimmter Wert der Funktion wird bei konstantem Produkt� � t errei ht. Je gr�o�er also die Zerfallskonstante ist, umso s hneller verringert si hx(t). Wel he physikalis he Dimension aber hat die Zerfallskonstante?Wie wir in einem sp�ateren Kapitel zeigen werden, darf das Argument einer Expo-nentialfunktion keine Dimension haben. Daraus folgt, dass die Zerfallskonstante �die Dimension \1/Zeit" hat. Ans hauli h gibt die Zerfallskonstante an, auf wel henWert x na h einer Zeiteinheit gesunken ist. Ist beispielsweise � = 6=h, so ist x na heiner Stunde auf x0e�6 abgefallen, ist � = 2=s, so hat si h x na h einer Sekundeauf x0e�2 verringert.Bei der Bes hreibung exponentieller Zerf�alle gibt man oft ni ht die Zerfallskonstantean, sondern die Halbwertszeit t 12 . Dies ist die Zeit, na h der nur no h die H�alfteder Ausgangssubstanz vorhanden ist. Setzen wir diese Bedingung in (3.39) ein, soerhalten wir: x(t 12 ) = x02 = x0 exp(��t 12 ) : (3.40)Au �osung dieser Glei hung na h t 12 ergibtt 12 = ln 2� : (3.41)1Eine dynamis he Variable ist eine zeitabh�angige Gr�o�e wie Ort oder Ges hwindigkeit einesTeil hens, Membranpotential einer Zelle, Masse eines Reaktionsproduktes et . Der Zustand einesSystems zur Zeit t ist dur h die Angabe der Werte aller dynamis hen Variablen des Systems zudiesem Zeitpunkt bestimmt. Je na h Bes hreibungsebene gen�ugen dabei mehr oder weniger vieleVariablen.Studiert man beispielsweise den freien Fall eines Volleyballs im Raum, so ist sein Zustand na hNewton dur h Angabe der drei Raum- und drei Ges hwindigkeitskoordinaten seines S hwerpunk-tes eindeutig festgelegt. Betra htet man au h die Drehungen des Balles, so ben�otigt man zus�atzli hAngaben �uber die momentane Ri htung der Dreha hse und Drehges hwindigkeit. Wollte man wei-terhin die elastis hen S hwingungen des Balles bes hreiben, so w�are dazu detaillierte Information�uber den von Punkt zu Punkt unters hiedli hen Abstand der Ballober �a he vom S hwerpunkterforderli h. Und so weiter.Dieses Beispiel zeigt au h, dass je na h Aufgabenstellung unters hiedli h detaillierte Bes hrei-bungsebenen bei der Analyse dynamis her Vorg�ange verwendet werden. Eine gro�e Kunst, geradebei der Modellierung biologis her Systeme, besteht darin, die Bes hreibungsebene so der Aufga-benstellung anzupassen, dass alle f�ur die untersu hten Ph�anomene wi htigen Eigens haften desSystems im Modell enthalten sind, alle anderen Details aber verna hl�assigt werden.

40 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENHalbwertszeit und Zerfallskonstante sind also genau umgekehrt proportional zuein-ander: je gr�o�er � umso kleiner t 12 , je kleiner � umso gr�o�er t 12 . Weiterhin sehen wiran (3.41) no hmals, dass � die Dimension \1/Zeit" haben muss, da die Halbwertszeitdie Dimension \Zeit" hat.Wir fassen zusammen:Notiz:Die Zerfallskonstante � ist ein Ma� f�ur die Ges hwindigkeit eines exponentiellenZerfalls und hat die Dimension \ 1Zeit".Die Halbwertszeit t 12 gibt an, na h wel her Zeit nur no h die H�alfte der Aus-gangssubstanz vorliegt und hat die Dimension \Zeit".Halbwertszeit und Zerfallskonstante sind umgekehrt proportional zueinander,und es gilt t 12 = ln 2� .3.5 Der Binomis he SatzEine Lieblingsbes h�aftigung von Mathematikern besteht darin, si h eine altbekann-te Aussage, einen Satz, eine Formel oder eine Glei hung vorzunehmen, hinrei hendlange �uber diese Aussage na hzudenken und dann eine allgemeinere Aussage auf-zustellen und zu beweisen. Die allgemeine Aussage enth�alt die alte Aussage alsSpezialfall. Dar�uberhinaus erlaubt die allgemeine Aussage weitrei hendere S hlu�-folgerungen, vereinfa hte Bere hnungen oder zeigt au h Bez�uge zu anderen Gebietender Mathematik auf, die aus dem urspr�ungli hen Spezialfall ni ht erkennbar gewesenw�aren.Wir werden nun konkret. Aus der S hule kennen sie die binomis hen Formeln:Binomis he Formeln:Seien a und b zwei reelle Zahlen. Dann gilt:(a+ b)2 = a2 + 2ab+ b2 (3.42)(a� b)2 = a2 � 2ab+ b2 (3.43)(a+ b)(a� b) = a2 � b2 (3.44)BEMERKUNG: Da a � b = a + (�b) ist die zweite binomis he Formel zur erstenFormel �aquivalent. Die dritte binomis he Formel kann dagegen ni ht auf die erstenbeiden zur�u kgef�uhrt werden.Wir nehmen nun die erste binomis he Formel und versu hen, sie f�ur beliebigenat�urli he Exponenten zu verallgemeinern. Wir su hen also na h einer Formel, diedas Ausmultiplizieren von (a+ b)n vereinfa ht. Um ein Gef�uhl daf�ur zu bekommen,was bei h�oheren Exponenten ges hieht, bere hnen wir zun�a hst (a + b)n f�ur kleinen:(a+ b)3 = (a+ b)(a+ b)2 = (a+ b)(a2 + 2ab+ b2) = a3 + 3a2b+ 3ab2 + b3 (3.45)(a+ b)4 = (a+ b)(a+ b)3 = : : : = a4 + 4a3b+ 6a2b2 + 4ab3 + b4 (3.46)

3.5. DER BINOMISCHE SATZ 41und so weiter ...Wel hes allgemeine Bildungsgesetz ste kt hinter den Worten \und so weiter"? Un-tersu hen wir in einem ersten S hritt den Vorgang der Bere hnung von (a + b)2:Da (a + b)2 = (a + b)(a + b), erhalten wir den Ausdru k f�ur (a + b)2, indem wirjedes Glied des Ausdru ks a+ b zuerst mit a und ans hlie�end mit b multiplizierenund die beiden Ergebnisse addieren. Das glei he Verfahren k�onnen wir anwenden,um (a + b)3 = (a + b)(a + b)2 zu bere hnen. In derselben Weise k�onnen wir dannfortfahren, und (a+ b)4, (a+ b)5 et . bere hnen.Den Ausdru k f�ur (a+b)n erh�alt man, indem man jedes Glied des vorher bere hnetenAusdru ks f�ur (a + b)n�1 wieder zuerst mit a, dann mit b multipliziert und dieErgebnisse addiert. Dies f�uhrt zu folgendem Diagramm:n=1: a+ b = a + b.a &b .a &bn=2: (a+ b)2 = a2 + 2ab + b2.a &b .a &b .a &bn=3: (a+ b)3 = a3 + 3a2b + 3ab2 + b3.a &b .a &b .a &b .a &bn=4: (a+ b)4 = a4 + 4a3b + 6a2b2 + 4ab3 + b4Hieraus l�a�t si h die allgemeine Regel f�ur die Bildung der KoeÆzienten in der Ent-wi klung von (a+ b)n direkt ablesen.Zur Verans hauli hung bauen wir eine dreie kige Anordnung von Zahlen auf, indemwir mit den KoeÆzienten 1 f�ur n = 0 und 1 bei a und b f�ur n = 1 beginnen. Alleweiteren Zahlen des Dreie ks sind dann jeweils die Summe ihrer beiden Na hbar-zahlen in der vorhergehenden Zeile. Diese Anordnung wird Pas al's hes Dreie kgenannt: n=0: 1n=1: 1 1n=2: 1 2 1n=3: 1 3 3 1n=4: 1 4 6 4 1n=5: 1 5 10 10 5 1n=6: 1 6 15 20 15 6 1n=7: 1 7 21 35 35 21 7 1Die n-te Zeile dieser Anordnung gibt die KoeÆzienten in der Entwi klung von (a+b)n na h abnehmenden Potenzen von a und zunehmenden Potenzen von b an, alsozum Beispiel(a+ b)7 = a7 + 7a6b+ 21a5b2 + 35a4b3 + 35a3b4 + 21a2b5 + 7ab6 + b7 : (3.47)SELBSTTEST: �Uberpr�ufen Sie 1:017 = 1:07213535210701.Wir f�uhren eine abgek�urzte S hreibweise mit unteren und oberen Indizes ein undbezei hnen die n+ 1 Zahlen in der n-ten Zeile des Pas als hen Dreie ks wie folgt:�n0�;�n1�;�n2�;�n3�; : : :� nn� 1�;�nn� (3.48)Wir erhalten also:

42 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENn=0: �00�n=1: �10� �11�n=2: �20� �21� �22�n=3: �30� �31� �32� �33�n=4: �40� �41� �42� �43� �44�De�nition (BinomialkoeÆzient):Sei k; n 2 N und k � n. Ein Symbol der Form�nk� (3.49)wird BinomialkoeÆzient genannt. Man liest \k aus n" oder au h \n �uber k".Kann man den Wert eines BinomialkoeÆzienten au h ohne Rekursion mit einerexpliziten Formel angeben?Zur Beantwortung dieser Frage betra hten wir no hmals das Pas als he Dreie kund lesen ab, dass f�ur alle n 2 N gilt:�n0� = �nn� = 1 (3.50)und �n1� = � nn� 1� = n (3.51)Aus dem Bildungsgesetz des Pas als hen Dreie ks folgen zwei weitereEigens haften des BinomialkoeÆzienten:Symmetriesatz: �nm� = � nn�m� (3.52)Additionssatz: �nm�+� nm+ 1� = �n+ 1m+ 1� (3.53)Aus den letzten vier Aussagen kann mit einem sogenannten Induktionsbeweis, aufden wir hier jedo h ni ht eingehen wollen, abgeleitet werden, dass die Binomialko-eÆzienten wie folgt ges hrieben werden k�onnen:�nk� = n � (n� 1) � : : : (n+ 2� k) � (n+ 1� k)k � (k � 1) � : : : 3 � 2 � 1 (3.54)

3.5. DER BINOMISCHE SATZ 43Damit haben wir eine explizite Formel f�ur die BinomialkoeÆzienten aufgestellt.Diese kann no h vereinfa ht werden, indem wir die sogenante Fakult�at einf�uhren:De�nition (Fakult�at):Sei n 2 N. Dann bezei hnet man das Symbol0! = 1n! = 1 � 2 � 3 � : : : � n f�ur n 6= 0 (3.55)als Fakult�at. Man liest \n Fakult�at".BEISPIEL: Es ist 5! = 1 � 2 � 3 � 4 � 5 = 120 .Erweitern wir nun den Bru h in (3.54) mit (n � k)!, dann k�onnen wir den Z�ahlerals n! s hreiben und erhalten �nk� = n!(n� k)! k! : (3.56)Damit k�onnen wir insgesamt zusammenfassen:Binomis her Satz:Sei a; b 2 R und n 2 N. Dann gilt:(a+ b)n = an +�n1�an�1b+�n2�an�2b2 + : : :: : :+� nn� 2�a2bn�2 + � nn� 1�abn�1 + bn= nXk=0�nk�akbn�k (3.57)mit �nk� = n!(n� k)! k! .BEMERKUNG: Fakult�at und BinomialkoeÆzient werden man hen von Ihnen s honaus der Wahrs heinli hkeitstheorie bekannt sein. So gibt die Fakult�at n! die Anzahlder Permutationen einer Menge mit n Elementen an, der BinomialkoeÆzient �ni�die Anzahl der i-elementigen Kombinationen einer Menge mit n Elementen ohneWiederholung. Denken Sie nur an die Gewinnwahrs heinli hkeit beim Lotto!SELBSTTEST: Versu hen Sie vor diesem Hintergrund, den Binomis hen Satz zuinterpretieren! Wel he Bedeutung haben die einzelnen Terme?3.5.1 Anwendungen des binomis hen SatzesMit dem Binomis hen Satz k�onnen Ausdr�u ke der Form (1+x)n mit betragsm�a�igkleinem x, das hei�t jxj � 1, sehr s hnell n�aherungsweise bere hnet werden. Na hdem Binomis hen Lehrsatz (3.57) gilt n�amli h:(1 + x)n = 1 +�n1�x+�n2�x2 +�n3�x3 + : : :+�nn�xn (3.58)

44 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENUm (1 + x)n exakt zu bere hen, m�ussten wir nun alle n BinomialkoeÆzienten aus-werten. Dies kann zu einem erhebli hen Re henaufwand f�uhren, wie sofort an einemBeispiel mit gr�o�erem n deutli h wird. Oft ben�otigt man das exakte Ergebnis jedo hgar ni ht und m�o hte nur eine erste Abs h�atzung von (1+x)n erzielen. Um eine guteN�aherung von (1+x)n zu erhalten, mu� man verstehen, wel he der Summanden in(3.58) gro� und wel he klein sind. Dabei hilft die Vorraussetzung, dass x klein seinsoll, und folgende Beoba htung:Ist der Betrag von x klein im Verglei h mit Eins, so wird x2 no h kleiner sein, x3no h kleiner, x4 no h kleiner ...So sollte die 1 der gr�o�te Summand sein. Betragsm�a�ig kleiner sollte der Summandmit x sein, no h kleiner der Summand mit x2, und so weiter. Wir erhalten folgendeN�aherungen:Lineare N�aherung: 1 +�n1�xQuadratis he N�aherung: 1 +�n1�x+�n2�x2Kubis he N�aherung: 1 +�n1�x+�n2�x2 + �n3�x3Dieses Spiel kann man nat�urli h beliebig fortsetzen und dur h sukzessive Hinzunah-me weiterer Terme immer bessere N�aherungen erhalten.Daraus ergibt si h die interessante Frage, bis zu wel her Ordung man gehen muss,um eine bestimmte Genauigkeit der Abs h�atzung zu erzielen. Wir wollen hier aufdiese Frage ni ht weiter eingehen | Sie sollten aber selbst dar�uber na hdenken!Es sei au h bemerkt, dass Ihr Tas henre hner von ganz �ahnli hen Tri ks bei der Be-re hnung von Funktionswerten spezieller Funktion wie Sinus und Cosinus Gebrau hma ht. Uns wird diese Methode sp�ater als Taylorentwi klung wieder begegnen.BEISPIEL:Wir wollen 1:0110 = (1 + 0:01)10 n�aherungsweise bere hnen.Na h dem Binomis hen Satz gilt:(1 + 0:01)10 = �100 �110(0:01)0 +�101 �19(0:01)1 +�102 �18(0:01)2+�103 �17(0:01)3 + : : :+�1010�10(0:01)10= 1 � 1 � 1 + 10 � 1 � 0:01 + 45 � 1 � 0:0001++120 � 1 � 0:000001+ : : :+ 1 � 1 � 10�20Damit erhalten wir f�ur (1 + 0:01)10 in linearer N�aherung den Wert 1:1, inquadratis he N�aherung den Wert 1:1045 und in kubis her N�aherung denWert 1:104620.Geben wir 1:0110 in einen Tas henre hner ein, so erhalten wir als Ergebnisdie Zahl 1.1046221. Die kubis he N�aherung ist also bis auf 5 Stellen hinterdem Komma genau. Viel besser ist der Tas henre hner also au h ni ht!BEMERKUNG: Die einzelnen Ausdr�u ke konnten in diesem Beispiel deshalb lei htgefunden werden, da der erste Summand im Term (1+0:01) die Eins war. Wenn Sie

3.6. AUFGABEN 45andere Potenzen n�aherungsweise bere hnen wollen, so sollten Sie in einem erstenS hritt Ihren Ausdru k auf die Form yn(1+x)n umformen. Wenn dann jxj � 1 gilt,k�onnen Sie wie hier gezeigt vorgehen. So kann beispielsweise 8:26 als 86(1+0:2=8)6 =86(1 + 0:025)6 ges hrieben werden | und 0:025 ist viel kleiner als Eins, womitwir eine gute Approximation in quadratis her oder kubis her N�aherung erwartenk�onnen.SELBSTTEST: Bere hnen Sie 7:16, 0:989 und 6:98 in quadratis her N�aherung undverglei hen Sie Ihr Ergebnis mit dem exakten Resultat.3.6 Aufgaben1. (Binomis he Formeln) Formen Sie mit Hilfe der binomis hen Formeln um undvereinfa hen Sie wenn m�ogli h!(a) (x+ 2)2(b) (2x� 3)2( ) (�z + 4)2(d) (�x� 2)2 (e) y2 � 4(f) y2 + 4y + 4(g) 4z2 � 12z + 9(h) (y � 3)(y + 3) (i) x2 + 6x+ 9x+ 3(j) y2 � 8x+ 16y � 4(k) (z + 2)2z2 � 42. (Potenzgesetze) Vereinfa hen Sie folgende Ausdr�u ke:(a) x2x5 =(b) (x3xx2)2 =( ) y5x2yy4 = (d) x� 12pxy =(e) xy�2z6z�4y2x =(f) (x 13 y� 13x2)3 = (g) yxax�a =(h) pxyz2x� 12 y 12 =3. (Exponentialfunktion, Logarithmus) Vereinfa hen Sie folgende Ausdr�u ke:(a) log(x2x5) =(b) 2 ln(px) =( ) log(x) � log(xy) = (d) 2x5x =(e) exeye�x =(f) loga(ax) = (g) 10log10(x2) =(h) e�(x2�4x)e�4 =(i) log( x2y�2 )� 2 log(x) =4. (Skalengesetze in der Biologie) Die Ausk�uhlung (=W�armeverlust) eines Lebewe-sens ist proportional zu seiner Ober �a he multipliziert mit dem Temperaturunter-s hied zwis hen Innen und Aussen. Die W�armeproduktion ist aber proportional zuseinem Volumen. (Wie sollten si h prinzipiell W�armeproduktion und W�armeverlusteines Tieres zueinander verhalten?) Was hat dies f�ur die Gr�o�e von S�augetieren inden k�alteren Regionen im Verglei h zu denen in den w�armeren zur Folge?5. (Biomasse von B�aumen) Wir wollen die Abh�angigkeit der Masse eines Baumesvon der Di hte der Bep anzung untersu hen. Die Baumdi hte % ist dabei de�niertals die Anzahl der B�aume auf einer bestimmten Boden �a he. Empiris h l�asst si h

46 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONENnun feststellen, dass das Verh�altnis L der Blatt �a he aller B�aume zur Boden �a hein etwa konstant ist. (�Uberlegen Sie si h, warum das so ist!),L = Gesamtblatt �a heBoden �a he= mittl. Blatt �a he eines Baumes� Zahl der B�aumeBoden �a he= �% = onst.Wir wollen nun annehmen, dass die mittlere Blatt �a he � eines Baumes proportionalzum Quadrat seiner H�ohe h, das mittlere Gewi ht w hingegen proportional zurdritten Potenz der Baumh�ohe ist. Wie verh�alt si h dann das mittlere Gewi ht weines Baumes als Funktion der Baumdi hte %? Diskutieren Sie Ihr Ergebnis!6. (Gewi ht von S hlangen) Bei der Untersu hung der S hlangenart Heterodonnasi us (S hlangenart in Kansas, USA) stellt man fest, dass ihr Gewi ht w pro-portional zur dritten Potenz ihrer L�ange l ist, w = al3 und a = 500g=m3. TragenSie diese Abh�angigkeit in einer doppelt-logarithmis hen Abbildung auf. (Auf derx-A hse gilt also x = log(l) und auf der y-A hse y = log(w), wobei l in Metern undw in Gramm gemessen wird.) Wel he Kurve erhalten Sie?F�ur eine andere S hlangenart gelte w = bl2 mit b = 200g=m2. Wie ver�andert si hIhr Ergebnis?Eine weitere S hlangenart gen�ugt der Beziehung w = al3+300g. Auf wel he S hwie-rigkeiten sto�en sie nun? Wie lassen si h diese umgehen?7. (Logarithmus) Zeigen Sie dur h geeignetes Logarithmieren bzw. Exponentieren:(a) loga x = logb x � loga b(b) loga b = 1logb a ( ) ln 10 = 1log10 e(d) ax = b x ) = logb a8. (Radioaktiver Zerfall) Radioaktive Sto�e zerfallen unter Aussendung von Strah-lung in andere Sto�e. Sei x(t) die Menge der no h ni ht zerfallenen Atome zumZeitpunkt t und x0 die Anzahl der zum Zeitpunkt t = 0 unzerfallenen Atome. Danngilt x(t) = x0e��t ;wobei � die Zerfallsrate ist (Zerf�alle pro Zeit).(a) Skizzieren Sie x(t) f�ur t � 0 einmal f�ur eine gro�e und einmal f�ur eine kleineZerfallsrate �.(b) Na h wel her Zeit ist genau die H�alfte des urspr�ungli h vorhandenen Sto�eszerfallen (\Halbwertszeit")?9. (Binomis her Satz) S hreiben Sie mit Hilfe des Binomis hen Satzes die Funktionf(x) = (2 + x)4 als Polynom in x. Werten Sie dieses Polynom in linearer N�aherungf�ur x = 0:01 aus (siehe Abs hnitt 3.5.1) und verglei hen Sie Ihr Ergebnis mit demexakten Resultat 2:014 = 16:32240801.10. (Beispiel aus der �Okologie) Ein wi htiges Charakteristikum eines Lebensrau-mes ist dessen Artendiversit�at. Die Diversit�at ist umso gr�o�er, je mehr vers hiedene

3.6. AUFGABEN 47Arten dort anzutre�en sind und je glei hm�a�iger die Individuen si h auf diese Artenverteilen. Der Shannon Index HS ist ein aus der Informationstheorie stammendesMa� f�ur die Diversit�at einer Bioz�onose, das genau diese beiden Eigens haften be-sitzt: Hs = � NXi=1 pi log2 pi mit pi = niM und M = NXi=1 niN ist die Anzahl der gefundenen Arten, ni sind deren Individuenzahlen, M ist dieAnzahl der insgesamt gefundenen Individuen. Die Wahrs heinli hkeit bzw. relativeH�au�gkeit, ein Individuum der Art i anzutre�en ist pi.(a) Wel he Werte kann pi (allgemein eine beliebige Wahrs heinli hkeit) annehmen?Wel hen Wert nimmt p1 an wenn die Art 1 sehr dominierend ist, d.h. von dieserArt kommen sehr viele Individuen vor, w�ahrend von allen anderen Arten nurEinzeltiere gefunden werden. Wie gro� ist dann pi f�ur die �ubrigen Arten?(b) Wel hen Wert hat NPi=1 pi, d.h. wie gro� ist die Wahrs heinli hkeit eine beliebigeArt anzutre�en?( ) Skizzieren Sie die Funktionen f(pi) = � log2 pi, g(pi) = pi und h(pi) = f(pi) �g(pi) = �pi log2 pi f�ur pi 2 [0; 1℄! Wel hen Funktionswert hat h(1)? Wel henFunktionswert hat h(0)? Re hnen sie dazu eventuell einige Werte f�ur kleine pi(z.B. 0.1, 0.01, 0.001) mit dem Tas henre hner aus.(d) An wel her Stelle pi s hneidet h(pi) die Winkelhalbierende g(pi)? KorrigierenSie eventuell ihre Skizze von h(pi)!(e) Wel he Werte haben p1 und HS , wenn nur eine einzige Art gefunden wurde?(f) Zeigen Sie, da� zur einfa heren Bere hnung der Shannon-Index auf folgendeForm gebra ht werden kann:HS = lnM � 1M NXi=1 ni lnni! = ln 2(g) In folgender Tabelle sind die Anzahl der Individuen ni aller Makroinvertebratenaufgelistet, die in zwei Abs hnitten P1 und P2 der Plane, einem Ba h im HohenFl�aming (Brandenburg), gefunden wurden:Art P1 P2 Art P1 P2Dugesia ono ephala 9 15 Heptagenia sulphurea 3 34An ylus uviatilis 2 7 Paraleptophlebia spe . 0 4Pisidium spe . 15 43 Perlodes dispar 0 3Erpobdella o to ulata 0 8 Protonemoura spe . 19 0Glossiphonia omplanata 6 10 Ore to hilus villosus 0 5Gammarus pulex 36 120 Halesus radiatus 0 2Gammarus roeseli 0 440 Hydropsy he pellu idula 15 0Baetis spe . 27 20 Hydropsy he spe . 2 20Ephemera dani a 0 120 Rya ophila fas iata 2 0In wel hem Abs hnitt ist die Diversit�at gr�o�er?(h) Bei einer festen Artenzahl N wird der Shannon-Index HS am gr�o�ten, wennalle Arten glei h h�au�g vorkommen, d.h. ni = nj f�ur alle i; j. Wie gro� sinddann die ni und die pi bei einer gegebenen Individuenzahl M? Wie gro� istdaf�ur der Shannon-Index HS?11. (Logarithmus) Bere hnen Sie log3 7 und log7 3 ! Formen Sie dazu die Ausdr�u kegeeignet um und benutzen Sie dann Ihren Tas henre hner!

48 KAPITEL 3. POTENZEN UND VERWANDTE FUNKTIONEN12. (Binomis her Satz) Bere hnen Sie 2:15 mit dem Tas henre hner! Bere hnenSie mit dem Binomis hen Satz ohne Tas henre hner die lineare und quadratis heN�aherung von 2:15 und verglei hen Sie das Ergebnis mit dem exakten Resultat!F�uhren Sie dann die glei hen Re hnungen f�ur 1:95 dur h!13. (Skalengesetze in der Biologie) Das Gewi ht G eines Tieres ist proportionalzu seinem Volumen V : G � V (Zusatzaufgabe: wel he physikalis hen Gesetze fallenIhnen dazu ein? Wie lautet dann also der Proportionalit�atsfaktor?). Der Dru kp, der auf jedem einzelnen der n F�u�e mit der Auftritts �a he A lastet, ist danngegeben dur h p = GnA . Warum haben also kleine Tiere (z.B. Katzen) relativ zurK�orpergr�o�e kleinere F�u�e als gro�e Tiere (z.B. Elefanten)?14. (Beispiel aus der Neurobiologie) Zur Partner�ndung setzen Heus hre ken ih-ren Gesang ein. Wenn der Gesang von einem paarungsbereiten Ges hle htspartnererkannt wird, bewegt si h dieser auf den S�anger zu. Es wurden nun die Antwortei-gens haften vers hiedener Neurone des auditoris hen Systems in Abh�angigkeit vonder Umgebungstemperatur untersu ht, um zu sehen, wie si h die Temperatur auf dieEigens haften der neuronalen Verarbeitung des Gesangs nieders hl�agt. Die meistenNeurone antworten bei h�oheren Temperaturen viel st�arker auf einen Reiz als beiniedrigen Temperaturen. Um diese Temperaturabh�angigkeit zu quanti�zieren, wirdaus den Daten der Q10-Wert bere hnet. Dieser gibt an, um wel hen Faktor si h eineGr�o�e �andert, wenn die Temperatur um 10ÆC erh�oht wird. Beispielsweise bedeutetein Q10-Wert von 2, da� si h die Me�gr�o�e bei einer Erh�ohung der Temperatur um10ÆC verdoppelt.(a) Die Antwortst�arke x(10ÆC) des BGN1-Neurons bei einer Temperatur von T =10ÆC sei 1, der Q10-Wert 1.5 . Wel he Antwortst�arke x(T ) hat das Neuron beiT = 20, 30 und 40ÆC ? Fertigen Sie eine Skizze der Funktion x(T ) an!(b) Wie w�urde die Temperaturabh�angigkeit f�ur Q10 = 1 und Q10 = 0:5 aussehen?( ) Wie Sie in ihrer Skizze sehen, w�a hst die Antwortst�arke x exponentiell mitder Temperatur T an. Was w�are eine geeignete Basis der Exponentialfunktion?Was steht in ihrem Exponenten? Wie sieht also die Funktion x(T ) aus?(d) Wird die Antwortst�arke x bei zwei vers hiedenen Temperaturen T gemessen,kann daraus der Q10-Wert bere hnet werden. Sei x1 = x(T1) die Antwort zurTemperatur T1 und x2 = x(T2) die Antwort zur Temperatur T2. Zeigen Sie,da� daraus Q10 na h folgender Formel bere hnet werden kann:Q10 = �x2x1� 10ÆCT2�T1(e) In na hfolgender Tabelle sind die Antwortst�arken zweier vers hiedener Neuro-nentypen bei jeweils zwei Temperaturen angegeben. Wel hes der beiden Neu-rone zeigt eine st�arkere Temperaturabh�angigkeit in seinem Antwortverhalten?Neuron T1=ÆC x1 T2=ÆC x2UGN2 23 170 32 280AN4 21 210 31 260

Kapitel 4Folgen4.1 Einf�uhrungFunktionen, deren De�nitionsberei h die nat�urli hen Zahlen sind, treten in unz�ahli-gen Fragestellungen auf | immer dann, wenn die unabh�angige Variable beispiels-weise aufgrund ihrer physikalis hen Natur nur diskrete Werte annehmen kann. Inder Mathematik wird deshalb f�ur diese Art von Funktionen ein eigener Begri� ein-gef�uhrt:De�nition:Eine Funktion f : N! R; n 7! f(n) nennt man eine reelle Zahlenfolge.Wir haben die vollst�andige Information �uber eine reelle Folge1, wenn wir alle ihreWerte y1 = f(1), y2 = f(2), : : : kennen. Dur h Angabe aller Folgenglieder ist eineFolge vollst�andig bes hrieben. Man gibt Folgen deshalb meistens in der folgendenForm an: (y1; y2; y3; : : :) (4.1)Diese S hreibweise kann no hmals verk�urzt werden, indem man wie bei dem Sum-mensymbol einen Lau�ndex benutzt. Vielfa h wird au h no h der De�nitionsberei hN der Folge weggelassen,2(yn)n2N = (yn) = (y1; y2; y3; : : :) : (4.2)1Der Begri� \reelle (Zahlen-)Folge" sollte eigentli h \reellwertige Zahlenfolge" hei�en, um mitdem ihm entspre henden Begri� \reellwertige Funktion" formal �ubereinzustimmen. Wir folgenjedo h der allgemeinen Konvention und werden dar�uber hinaus meistens sogar nur kurz von einer\Folge" spre hen, selbst wenn wir den speziellen Fall einer reellen Zahlenfolge behandeln.2Diese Notation k�onnte mit dem Symbol einer Menge M = fy1; y2; y3; : : : ymg verwe hselt wer-den. Es ist deshalb wi htig, beide Konzepte ni ht dur heinander zu bringen: Folgen sind spezielleFunktionen, und damit sind zwei Folgen (xn) und (yn) genau dann identis h, wenn sie gliedweise�ubereinstimmen, also xn = yn f�ur alle n 2 N. Dagegen sind zwei Mengen identis h, wenn sie inallen ihren Elementen �ubereinstimmen, unabh�angig davon, in wel her Reihenfolge diese notiertwurden. Bei Folgen ist also die Anordnung ihrer Glieder wesentli h, bei Mengen ist die Anordnungihrer Elemente ohne jede Bedeutung. Weiterhin k�onnen zwei Glieder ai und aj einer Folge (an)identis h sein, ai = aj . Bei der De�nition einer Menge ist es jedo h unerhebli h, ob ein Elementeinfa h oder mehrfa h auftritt, es wird nur einmal gez�ahlt. Ein Beispiel zur Illustration diesesUnters hiedes: Wir betra hten die Folge (an)n2N mit an = 1 f�ur alle n 2 N. Sie besteht aus un-endli h vielen Folgengliedern, die alle Eins sind. Die Menge aller FolgengliederM = fa1; a2; a3; : : :gbesteht allerdings nur aus einem einzigen Element, der Eins. Es gilt M = fa1 ; a2; a3; : : :g = f1g.49

50 KAPITEL 4. FOLGENMathematis he Motivation:Na h De�nition hat eine Folge immer unendli h viele Folgenglieder. Re hnet manmit Folgen, re hnet man mit dem Unendli hen, sowohl dem unendli h Gro�en wiedem unendli h Kleinen. Das ist zwar ungemein reizvoll, f�uhrt aber zu einigen s hwerverdauli hen Begri�en.Wir wollen an dieser Stelle ni ht in die Tiefen der Mathematik absteigen. Hiernur soviel: Sie wissen aus Kapitel 1.3.2, dass p2 keine rationale Zahl sein kann.Aber p2 kann beliebig gut dur h rationale Zahlen angen�ahert werden. So kannman eine Folge de�nieren, die, wie wir sp�ater sagen werden, gegen p2 konvergiert.Erst dur h den Begri� \Folge" l�a�t si h de�nieren, was man unter p2 und allenanderen ni ht-rationalen reellen Zahlen verstehen soll. Die reellen Zahlen sind jedo hdie Basis zum L�osen von den unters hiedli hsten Glei hungen, die uns in dieserVorlesung begegnen werden. Deshalb stellen Folgen aus mathematis her Si ht einf�ur das Verst�andnis vieler anderer Konzepte zentrales Handwerkszeug dar.Biologis he Motivation:Die Biologie ist voll von Folgen. Stellen Sie si h etwa eine Insektenpopulationen mitni ht-�uberlappenden Generationen vor. Jedes Folgenglied k�onnte dann die Anzahlvon Individuen in einer bestimmten Generation angeben. Wir werden in den Kapi-teln 6 und 7 eine ganze Reihe von biologis hen Beispielen f�ur Folgen kennenlernen.BEISPIELE:Die konstante Folge: (5)n2N = (5; 5; 5; 5; 5; :::)Die Folge der nat�urli hen Zahlen: (n)n2N = (1; 2; 3; 4; 5; ; :::)Die Folge der Quadratzahlen: (n2)n2N = (1; 4; 9; 16; 25; :::)Die harmonis he Folge: ( 1n )n2N = (1; 12 ; 13 ; 14 ; 15 ; :::)Die geometris he Folge: (qn)n2N = (q; q2; q3; q4; q5:::)Als Spezialfall der geometris hen Folge mit q = �1 die zwis hen �1 und 1alternierende Folge: ((�1)n)n2N = (�1; 1;�1; 1;�1; :::)Die Folge aller positiven rationalen Zahlen pq (siehe Skizze Abb. 4.1):3�11 ; 12 ; 21 ; 31 ; 22 ; 13 ; 14 ; 23 ; 32 ; 41 ; : : :�Bis jetzt wurden Folgen dadur h de�niert, dass ihre Folgenglieder explizit angegebenwurden. Gerade bei der Modellierung dynamis her Prozesse, wie wir sie in sp�aterenKapiteln behandeln werden, studiert man oft das Verhalten von Folgen, in denensi h das (n+ 1)-te Folgenglied aus dem n-ten Folgenglied bere hnet:Rekursive De�nition von Folgen:Eine Folge (an)n2N wird rekursiv de�niert dur h1. Angabe des ersten Folgengliedes a1 und2. Angabe einerRekursionsvors hrift, dur h die man das Folgenglied an+1aus dem Folgenglied an bere hnen kann.Das erste Folgenglied a1 wird au h Anfangswert genannt.3Wie wir aus Kapitel 1 wissen, gibt es unendli h viele rationale Zahlen. Da sie als Gliedereiner Folge Zahl f�ur Zahl dargestellt werden k�onnen, sagt man au h, dass es abz�ahlbar vielerationale Zahlen gibt. Im Gegensatz dazu kann man zeigen, dass die Menge der reellen Zahlenni ht abz�ahlbar ist.

4.1. EINF�UHRUNG 513
2
1
4
1 2 3
p
q4 5Abbildung 4.1: Skizze zur Folge aller rationalen Zahlen.BEMERKUNG: Es gibt au h allgemeinere Rekursionsvors hriften. Bei diesen istdas (n+1)-te Folgenglied ni ht nur eine Funktion des n-ten Gliedes. Bei der Fibo-na ifolge (siehe unten) bezieht si h die Rekursionsvors hrift beispielsweise auf dasn-te und das (n� 1)-te Folgenglied.BEISPIEL 1: Unendli her Kettenbru hDie Rekurionsvors hrift an+1 = 11+an mit dem ersten Folgenglied a1 = 1ergibt einen unendli hen Kettenbru h:11 + 11 + 11 + � � �BEISPIEL 2: Fibona ifolgeAnnahmen:In einem der ersten �uberlieferten Populationsmodelle nahm Fibona i (1170-1250) an, dass jedes Kanin henpaar im ersten und zweiten Monat seinesLebens je ein weiteres Kanin henpaar zur Welt bringt.Modell:Bezei hnet man mit xt die Anzahl der im Monat t geborenen Kanin hen-paare, dann werden si h im Monat t+2 alle im Monat t+1 und t geborenenKanin henpaare fortp anzen. So ergibt si h die Fibona ifolge der neuge-borenen Kanin henpaare dur h die Anfangswerte x1 = 1 und x2 = 1 unddie Rekursionsvors hriftxt+2 = xt+1 + xt.Die Rekursionsvors hrift bezieht also ni ht nur den Vorg�anger, sondern au hden Vorvorg�anger ein.Frage:Wie entwi kelt si h Ihrer Meinung na h die Kanin henpopulation f�ur langeZeiten? Bere hnen Sie dazu die n�a hsten Glieder der Folge und s h�atzenSie daraus die weitere Entwi klung ab.

52 KAPITEL 4. FOLGEN4.2 Monotonie und Bes hr�anktheitMotiviert dur h die Analogie zu biologis hen oder physikalis hen Entwi klungs-vorg�angen interessieren wir uns au h beim Studium mathematis her Folgen (xn)n2Ndaf�ur, wie sie si h mit zunehmendem Index n ver�andern. Sind die einzelnen Folgen-glieder au h f�ur gro�e n von bes hr�ankter Gr�o�e? Streben sie gar f�ur gro�e n einemfesten Wert zu?Als erste Begri�e zur Analyse dieser Fragen de�niern wir:De�nition (Monotonie von Folgen):Eine Folge (xn) hei�tmonoton wa hsend, wenn xn � xn+1 f�ur alle n 2 N,streng monoton wa hsend, wenn xn<xn+1 f�ur allen2N,monoton fallend, wenn xn � xn+1 f�ur alle n 2 N,streng monoton fallend, wenn xn > xn+1 f�ur alle n 2 N.BEMERKUNG: Eine Folge ist na h De�nition eine Funktion. F�ur reelle Funktio-nen hatten wir in Kapitel 2.1 den Begri� der Monotonie s hon eingef�uhrt. Dieserentspri ht konzeptionell genau dem gerade eingef�uhrten Begri�.BEISPIEL: Monotonie der geometris hen Folge.Sei q 2 R. Dann ist die geometris he Folge (qn)n2N(1) streng monoton wa hsend wenn 1 < q,(2) konstant wenn q = 0 oder q = 1,(3) streng monoton fallend wenn 0 < q < 1, und(4) weder monoton wa hsend no h fallend, wenn q < 0.Beweis der ersten Aussage:Es gilt xn+1 = qn+1 = q � qn = q � xn.Da 1 < q folgt hieraus, dass xn+1 > xn f�ur alle n 2 N ist.Das ist jedo h gerade die Bedingung f�ur strenge Monotonie. 2De�nition:Eine Folge (xn)n2N hei�tna h oben bes hr�ankt, wenn es ein K2R gibt, so dass xn�K f�ur alle n2N,na h unten bes hr�ankt, wenn es ein K 2 R gibt, so dass xn � K f�ur allen2N,bes hr�ankt, wenn die Folge na h oben und unten bes hr�ankt ist.BEISPIEL 1: Bes hr�anktheit der geometris hen Folge:Sei q 2 R. Dann ist die geometris he Folge (qn)n2N(1) f�ur �1 � q � 1 bes hr�ankt,(2) f�ur q > 1 na h unten bes hr�ankt,(3) f�ur q < �1 weder na h oben no h na h unten bes hr�ankt.Beweis der ersten Aussage:Gesu ht ist also ein K > 0, so dass jqnj < K f�ur alle n 2 N gilt. W�ahltman K = jqj, so gilt, da jqj < 1:K = jqj � jqj2 � jqj3 � � � � � jqjn = jqnjDamit ist die Behauptung gezeigt. 2

4.2. MONOTONIE UND BESCHR�ANKTHEIT 53BEISPIEL 2:Monotonie und Bes hr�anktheit der dur h an = 3n�23�4n de�nier-ten Folge (an)n2N.(1) Monotonie:Wir zeigen, dass (an)n2N streng monoton wa hsend ist. Dazu formen wirdie Unglei hung an+1 > an solange �aquivalent um, bis wir eine o�ensi ht-li h wahre Aussage erhalten. F�ur alle n 2 N gilt 3�4n < 0. Damit erhaltenwir:an+1 > an () 3(n+ 1)� 23� 4(n+ 1) > 3n� 23� 4n() (3(n+ 1)� 2) (3� 4n) > (3n� 2) (3� 4(n+ 1))() (3n+ 1)(3� 4n) > (3n� 2)(�1� 4n)() 9n+ 3� 12n2 � 4n > �3n+ 2� 12n2 + 8n() 3 > 2Die letzte Aussage ist f�ur alle n 2 N wahr. Damit ist au h die erste f�ur allen 2 N wahr. (an)n2N ist daher streng monoton wa hsend. 2(2) Bes hr�anktheit:Wir zeigen, dass die Folge au h bes hr�ankt ist. Zuerst sei bemerkt, dass dieFolge na h unten dur h a1 bes hr�ankt sein muss, da sie monoton wa hsendist.Wir zeigen nun, dass die Folge dur h Null na h oben bes hr�ankt ist. Dazuformen wir den Term an � 0 so lange �aquivalent um, bis eine wahre Aussageerrei ht ist. an � 0 () 3n� 23� 4n � 0 () 3n� 2 � 0Die letzte Aussage gilt f�ur alle n 2 N. Damit gilt au h die erste Aussagef�ur alle n 2 N. Die Folge ist also dur h 0 na h oben bes hr�ankt. 2BEISPIEL 3: Monotonie und Bes hr�anktheit der rekursiv dur h die Vor-s hrift an+1 = an2 + 1an und a1 = 2 de�nierten Folge (an)n2N.(1) Monotonie:Wir zeigen, dass (an)n 2 N streng monoton fallend ist. Das ist in diesemFall allerdings eine ziemli he Fuselarbeit, denn dass die Folge streng mono-ton fallend ist, k�onnen wir zun�a hst nur unter der Bedingung zeigen, dassalle Folgenglieder gr�o�er alsp2 sind. Wir formen dazu den Term an+1 < ansolange �aquivalent um, bis wir eine wahre Aussage erhalten:an+1 < an () an2 + 1an < an() a2n + 2 < 2a2n() 2 < a2nDie letzte Aussage ist f�ur alle n 2 N nur wahr, wenn alle Folgengliedergr�o�er als p2 sind. 2Es bleibt also no h zu zeigen, dass an > p2 f�ur alle n 2 N gilt.Beweis:Sei an > p2. Dann gibt es ein � > 0, so dass an = p2 + � ist. Deshalb giltf�ur alle n 2 N: an+1 = an2 + 1an

54 KAPITEL 4. FOLGEN= p2 + �2 + 1p2 + �= 12p2 + �2 + 1p2 + � � p2� �p2� �= 12p2 + �2 + p2� �2� �2> 12p2 + �2 + p2� �2= 12p2 + �2 + 12p2� �2= p2Damit ist gezeigt, dass das n�a hste Folgenglied immer gr�o�er als p2 ist,wenn dies au h auf das vorangegangene Folgenglied zutri�t. Da aber a1 =2 > p2 ist, sind alle Folgenglieder gr�o�er als p2. 2Beide S hritte zusammen ergeben nun die gew�uns hte strenge Monotonieder Folge.(2) Bes hr�anktheit:Vorbemerkung: Da a1 > 0 sind alle an > 0. Denn an ist als Summe positiverZahlen wieder positiv. Wir ben�otigen diese Aussage glei h beim Umformender Unglei hungen.Wir zeigen, dass die Folge na h unten dur h 1 bes hr�ankt ist. Dazu formenwir den Term an+1 > 1 wieder so lange �aquivalent um, bis eine wahreAussage erzielt ist.an+1 > 1 () an2 + 1an > 1() a2n + 2 > 2an() a2n � 2an + 2 > 0() (an � 1)2 + 1 > 0Dabei wurde im vorletzten S hritt die zweite binomis he Formel benutzt.Die letzte Aussage gilt f�ur alle n 2 N. Deshalb gilt au h die erste Aussagef�ur alle n 2 N. Die Folge ist dur h 1 na h unten bes hr�ankt.Da die Folge streng monoton fallend ist, wie eben gezeigt, ist die Folge au hna h oben bes hr�ankt. 24.3 Aufgaben1. (Folgen) Die Masse einer Bakterienpopulation an in der n-ten Generation seigegeben dur h an = n� 2n� 1 : (4.3)(a) Wie gro� ist die Masse der Bakterien an+1 in der darauf folgenden Generationn+ 1 ?(b) Wird die Population wa hsen, d.h. ist die Folge an monoton wa hsend?( ) Gibt es eine maximale Masse der Bakterienpopulation, d.h. ist die Folge be-s hr�ankt?

4.3. AUFGABEN 55(d) Eine allgemeine Version der Glei hung (4.3) w�arean = n� kn� q ; k; q 2 R : (4.4)Wie m�ussten k und q gew�ahlt werden, damit die Population w�a hst?2. (rekursive Folge) Eine Folge an sei gegeben dur h die Rekursionsvors hriftan+1 = 23an :(a) Bere hnen Sie die Folgenglieder a1 bis a4 mit a0 = 4 und tragen Sie diese inein Koordinatensystem ein!(b) K�onnen Sie eine Formel f�ur das n-te Folgenglied an angeben, wenn ein beliebigesa0 gegeben ist?( ) Zeigen Sie, dass die Folge an streng monoton fallend ist!(d) Ist an na h unten bes hr�ankt? Ist die Folge konvergent?(e) Wel hen Grenzwert hat die Folge an?3. (Monotonie von Folgen) Wel he der Folgen sind monoton wa hsend, wel hemonoton fallend, wel he zeigen strenge Monotonie? Begr�unden Sie ihre Antwortmathematis h!(a) an = 1(b) xt = �12�t( ) ym = ��12�m(d) �n+1 = 2 � �n (�0 = 1)(e) zn = n+ 1n

56 KAPITEL 4. FOLGEN

Kapitel 5GrenzwerteFragen na h dem Verhalten eines (biologis hen) Systems �uber lange Zeiten sindvon gr�o�ter Bedeutung sowohl in der Biologie als au h in anderen Wissens haften:Stirbt beispielsweise eine Population unter gegebenen Verh�altnissen aus oder strebtsie einem stabilen Glei hgewi ht zu?Do h wie soll man derartige Fragen quantitativ behandeln?Ein konkretes Beispiel: Eine Population verringere si h in jeder Generation umeinen festen Faktor 0 < q < 1. Die Gr�o�e der Population verh�alt si h also vonGeneration zu Generation wie die geometris he Folge, xn+1 = q xn. Obwohl xnna h diesem Modell bei positivem Anfangswert x1 zu keinem Zeitpunkt Null werdenkann, werden die Werte do h immer kleiner und kleiner und damit f�ur lange Zeiten(gro�e n) in einem gewissen Sinn `vers hwindend' klein.1Um diese Vorstellung zu quanti�zieren, k�onnten wir folgenderma�en vorgehen: Wirgeben eine beliebig gew�ahlte Populationsgr�o�e " > 0 vor und fragen, na h wel herGeneration die Population auf (beziehungsweise unter) diesen Wert gefallen ist, undob sie f�ur alle weiteren Zeiten immer unter diesem Wert bleiben wird. Wenn wirdiese Frage f�ur beliebig kleine " > 0 bejahen k�onnen, dann k�onnen wir mit Re ht1An diesem einfa hen Beispiel werden au h die Grenzen mathematis her Modelle deutli h:Einerseits ers heint es sinnvoll, die Abnahme einer Population dur h ein kompaktes Modell zubes hreiben und dazu beispielsweise die geometris he Folge zu w�ahlen. Umgekehrt impliziert die-ser Ansatz, dass die Populationsgr�o�e eine kontinuierli he Variable sein muss, da xn f�ur jedenbeliebigen Anfangswert x1 und jedes 0 < q < 1 ab einem gewissen Folgenglied keine ganze Zahlmehr sein kann. Dies steht im Widerspru h zur biologis hen Bedeutung dieser Variable, f�allt je-do h ni ht weiter ins Gewi ht, solange xn � 1, denn bei einer Populationsgr�o�e von mehrerenTausend Individuen ist der relative Fehler verna hl�assigbar, der dur h eine kontinuierli he Model-lierung entsteht. Sobald aber xn von der Gr�o�enordnung Eins ist, kann das Modell der Realit�atni ht mehr entspre hen, da es nur 0; 1; 2; : : :, ni ht aber 0:61 Individuen geben kann. Sp�atestensin diesem Berei h m�usste man also zu einer anderen Bes hreibung �ubergehen, die der diskretenNatur der betra hteten Ph�anomene gere ht wird.Wir werden immer wieder an derartige Grenzen von Modellen sto�en, Grenzen, die selbst in denbesten Modellen auftreten m�ussen: Ein gutes Modell ist eine Karikatur der Realit�at, die die f�ur diebetre�ende Fragestellung wi htigen Aspekte enth�alt, alles im Moment unwi htige jedo h so kurzwie m�ogli h abhandelt. Diese Reduktion auf das Wesentli he bringt es mit si h, dass Modelle nureinen begrenzten Geltungsberei h haben k�onnen. Die Mathematik ist hier von gro�er Hilfe, da sie eserlaubt, die Konsequenzen einer bestimmten Modellannahme bis in das letzte Detail zu analysierenund damit au h bei komplexen Vorg�angen zu verstehen, wel he Aspekte zu wel hen Ph�anomenengef�uhrt haben. In diesem Sinn werden wir uns mit Grenzwerten, reellwertigen Funktionen, undanderen mathematis hen Konstrukten bes h�aftigen, selbst wenn wir wissen, dass diese Konzepteder biologis hen Realit�at in vielen F�allen nur bedingt gere ht werden.57

58 KAPITEL 5. GRENZWERTEbehaupten, dass die Population `vers hwindend' klein wird. Mathematis h sagt mandaf�ur, dass die Folge \f�ur n gegen unendli h gegen Null geht", oder au h, dass sieden \Grenzwert" Null hat. Dabei ist no hmals zu betonen, dass xn f�ur jedes n vonNull vers hieden ist, si h aber eben im obigen Sinn beliebig nahe an Null ann�ahert.Diese Ideen sollen nun pr�azise formuliert werden:5.1 Konvergenz und DivergenzDe�nition (Konvergenz, Grenzwert, Divergenz):Eine reelle Zahlenfolge (an)n2N konvergiert gegen eine reelle Zahl a, wenn zujedem " > 0 ein n" existiert, so dass gilt:jan � aj < " f�ur alle n � n" : (5.1)Diese Zahl hei�tGrenzwert oder Limes der Folge (an)n2N. Man s hreibt daf�urau h limn!1 an = a (5.2)Eine Folge, die ni ht konvergiert, wird divergent genannt.Eine Folge wird also genau dann konvergent genannt, wenn man f�ur jeden freigew�ahlten, positiven Wert " ein n" angeben kann, so dass alle Folgenglieder mitn � n" im Intervall (a� "; a+ ") liegen. Dabei h�angt n" im allgemeinen stark von" ab. Bei kleinem " wird n" sehr gro� werden.Oft ers hlie�t si h einem diese De�nition ni ht sofort. Deshalb wollen wir sie aneinigen einfa hen Beispiel verdeutli hen:BEISPIEL 1: Die harmonis he Folge � 1n�n2N konvergiert gegen den Grenz-wert Null: limn!1 1n = 0 : (5.3)Beweis:Wir s hreiben die ersten Folgenglieder auf �1; 12 ; 13 ; 14 ; :::� und vermutenden Grenzwert 0. Um zu zeigen, dass Null wirkli h der Grenzwert der har-monis hen Folge ist, m�ussen wir f�ur jedes " > 0 ein n" angeben, so dass�� 1n � 0�� < " f�ur alle n � n" gilt.Wir su hen zun�a hst ein n"1 f�ur "1 = 110 . W�ahlt man beispielweise n"1 =n 110 = 10, so gilt f�ur alle n � n 110 = 10:��� 1n � 0��� = ��� 1n ��� = 1n � 1n"1 = "1 = 110Die geforderte Bedingung ist also f�ur "1 = 110 erf�ullt.�Ahnli h geht man f�ur "2 = 1100 vor. Man w�ahlt n 1100 = 100. Dann gilt f�urn � n 1100 = 100: ��� 1n � 0��� = 1n � 1n"2 = "2 = 1100Au h hier ist die geforderte Bedingung erf�ullt.So k�onnte man im Prinzip weiterverfahren und f�ur jedes beliebige " > 0 einn" su hen, so dass Bedingung (5.1) erf�ullt ist. Gefordert wird dies allerdings

5.1. KONVERGENZ UND DIVERGENZ 59f�ur alle " > 0. Da " damit jeden positiven reellen Wert annehmen darf, sindsehr viele (genauer gesagt �uberabz�ahlbar unendli h viele) F�alle zu betra hten: : :Um die Arbeit zu verk�urzen stellt man eine Vors hrift vor, die f�ur jedes " > 0ein n" angibt, das die geforderte Abs h�atzung erf�ullt. Sei also " > 0. Wirw�ahlen n" = 1" . Dann gilt f�ur alle n � n":��� 1n � 0��� = ��� 1n ��� = 1n � 1n" = " :Damit ist die Konvergenz der geometris hen Folge bewiesen. 2BEISPIEL 2: Die Folge � nn+1�n2N konvergiert gegen den Grenzwert Eins:limn!1 nn+ 1 = 1 :Beweis:Um zu zeigen, dass die Folge � nn+1�n2N konvergiert, m�ussen wir zeigen,dass es zu jedem " > 0 ein n" gibt, so dass jan � aj < " f�ur alle n � n"gilt. Wir w�ahlen n" = 1" . Dann gilt f�ur n � n":��� nn+ 1 � 1��� = ��� nn+ 1 � n+ 1n+ 1 ���= ���n� n+ 1n+ 1 ���= 1n+ 1� 1n" + 1< 1n" = 11" = "Was zu beweisen war. 2BEISPIEL 3: Die Folge ((�1)n)n2N ist divergent.Beweis:Aufeinanderfolgende Glieder nehmen abwe hselnd die Werte +1 und �1an. Wenn eine dieser beiden Zahlen als Kandidat f�ur den Grenzwert a derFolge gew�ahlt wird, ist zwar jan � aj = 0 f�ur alle geraden (beziehungsweiseungeraden) n, f�ur die dazwis henliegenden n gilt dann aber jan � aj = 2.Damit k�onnte Bedingung (5.1) f�ur kein " < 2 erf�ullt werden. W�ahlt maneine beliebige andere Zahl a als m�ogli hen Grenzwert, so kann jan�aj ni htunter die kleinere der beiden Zahlen ja � 1j und ja + 1j gebra ht werden,womit die Konvergenz wiederum ausges hlossen ist. 2Im Prinzip kann man si h nun f�ur jede x-beliebige Folge einen Kandidatenf�ur einen Grenzwert �uberlegen und dann anhand der De�nition �uberpr�ufen,ob die Folge tats�a hli h gegen diesen Grenzwert konvergiert. Das kann al-lerdings ziemli h s hwierig sein, wie Beispiel 4 erahnen l�asst.BEISPIEL 4: Die geometris he Folge (qn)n2N konvergiert f�ur jqj < 1 gegenNull. Beweis:Sei " > 0. Wir de�nieren die Hilfsvariable a als a = �1 + 1jqj . Dann ist apositiv, da jqj < 1. Weiter gilt jqjn = 1(1+a)n .Wir w�ahlen nun n" = 1a" . Dann gilt wegen des Binomis hen Satzes (3.57)f�ur n � n�:jqn � 0j = jqnj

60 KAPITEL 5. GRENZWERTE= 1(1 + a)n= 11 + �n1�a+ �n2�a2 + �n3�a3 + : : :+ �nn�an< 1�n1�a= 1na < 1n"a = �Was zu beweisen war. 2Im n�a hsten Abs hnitt werden wir einige Re henregeln f�ur Grenzwerte kennen ler-nen. Mit ihnen l�a�t si h bei vielen Folgen re ht einfa h zeigen, dass sie konvergierenund wie ihr Grenzwert lautet.5.2 Eigens haften von GrenzwertenAns hauli h sollte jede konvergente Folge genau einen Grenzwert haben. Dass siemindestens einen Grenzwert besitzt, folgt sofort aus der De�nition. Aus der De�ni-tion folgt aber au h, dass sie h�o hstens einen Grenzwert besitzen kann:Satz:Eine konvergente Folge besitzt genau einen Grenzwert.Beweis:Seien a und b zwei Grenzwerte der Folge (xn)n2N. Wir wollen zeigen, dass a = b ist.Das ist �aquivalent dazu zu zeigen, dass ja� bj = 0 ist.Mit Hilfe der Dreie ksunglei hung (1.23) folgt:ja� bj = ja� xn + xn � bj � ja� xnj+ jb� xnjDa (xn)n2N gegen a konvergiert, wird jxn � aj f�ur gro�es n beliebig klein, kleinerals jedes " > 0. Da (xn)n2N aber au h gegen b konvergiert, wird au h jxn � bj f�urgro�es n beliebig klein, kleiner als jedes " > 0. Wir erhalten insgesamt, dass ja � bjkleiner als jedes " > 0 ist. ja� bj mu� also glei h Null sein. 2Wir geben nun ohne Beweis die s hon angek�undigten Re henregeln an.Re henregeln f�ur Grenzwerte:Seien (xn)n2N und (yn)n2N konvergente Folgen mit limn!1 xn = x undlimn!1 yn = y. Ferner sei a 2 R. Dann gilt:Skalarmultiplikation : limn!1(axn) = ax f�ur alle a 2 R (5.4)Addition : limn!1(xn + yn) = x+ y (5.5)Multiplikation : limn!1(xn � yn) = x � y (5.6)Division : limn!1�xnyn� = xy falls yn 6= 0 f�ur alle nund y 6= 0 (5.7)Betrag : limn!1 (jxnj) = jxj (5.8)Allein mit dem Wissen, dass limn!1 1n = 0 ist, lassen si h mit diesen Re henregelnjetzt die unters hiedli hsten Grenzwerte bere hnen:

5.2. EIGENSCHAFTEN VON GRENZWERTEN 61BEISPIEL 5: limn!1 7n3 = 7 limn!1 1n3 = 7� limn!1 1n�� limn!1 1n2�= 7� limn!1 1n�� limn!1 1n�� limn!1 1n�= 7 � 0 � 0 � 0 = 0Die Umformung in der ersten Zeile setzt vorraus, dass der Grenzwert limn!1 1n2tats�a hli h existiert. Dies wird in der zweiten Zeile im Na hhinein best�atigt.BEISPIEL 6:limn!1 n4 + 2n2 + 13n4 + 4n2 + 7n = limn!1 n4(1 + 2n2 + 1n4 )n4(3 + 4n2 + 7n3 )= limn!1 �1 + 2n2 + 1n4 �limn!1 �3 + 4n2 + 7n3 �= limn!1(1) + limn!1 2n2 + limn!1 1n4limn!1(3) + limn!1 4n2 + limn!1 7n3= 1 + 0 + 03 + 0 + 0 = 13So ausf�uhrli h s hreibt man das nat�urli h nie mehr auf. Man sollte si h dieeinzelnen S hritte aber wenigstens einmal klargema ht haben!Zum S hlu� des Abs hnitts geben wir no h ein paar weitere Eigens haften vonGrenzwerten an.Satz:Jede konvergente Folge ist bes hr�ankt.SELBSTTEST: Warum?Satz:Seien (xn)n2N und (yn)n2N konvergente Folgen mit den Grenzwerten x und y.Dann gilt:1. Verglei hssatz: Wenn f�ur alle Folgenglieder xn � yn gilt, dann gilt au hx � y.2. Eins hn�urungssatz: Sei (zn)n2N eine weitere Folge. Konvergieren dann(xn)n2N und (yn)n2N gegen denselben Grenzwert, x = y, und gilt f�ur alleFolgenglieder xn � zn � yn, dann ist au h (zn)n2N konvergent mit demselben Grenzwert, z = x = y.SELBSTTEST: : Verans hauli hen Sie si h diese beiden S�atze graphis h!

62 KAPITEL 5. GRENZWERTE5.3 Monotone KonvergenzWenn wir uns bisher gefragt haben, ob eine Folge konvergiert, mussten wir imGrunde s hon wissen gegen wel hen Grenzwert sie konvergiert. So wurde in derDe�nition (5.1) der Konvergenz die Kenntnis des Grenzwerts explizit gefordert.In diesem Abs hnitt werden wir nun ein Kriterium kennen lernen, das es uns erlaubt,die Konvergenz einer Folge au h ohne Kenntnis des Grenzwerts na hzuweisen. Aufden ersten Bli k mag dies wenig hilfrei h ers heinen. Wel her Nutzen besteht darinzu wissen, dass eine Folge konvergent ist, wenn man den Grenzwert selbst ni htkennt? Die Antwort ste kt s hon in der Frage: Oft interessiert man si h ni ht f�urden genauen Wert des Grenzwertes, ents heidend ist nur, ob die Folge konvergiertoder ni ht.2Satz (Monotone Konvergenz von Folgen):Ist eine Folge (xn)n2N monoton wa hsend und na h oben bes hr�ankt, so ist siekonvergent.Ist eine Folge (xn)n2N monoton fallend und na h unten bes hr�ankt, so ist siekonvergent.Beweisidee:Wir hatten in Kapitel 1 erw�ahnt, dass die reellen Zahlen vollst�andig sind. Sie solltengeometris h motivierte Zahlen wie p2 und � beinhalten. F�ur einen Mathematikerist geometris h motiviert viel zu s hwammig. Er m�o hte ganz pr�azise wissen, wo-dur h die Vollst�andigkeit der reellen Zahlen harakterisiert ist. Daf�ur wird er oft nurKopfs h�utteln ernten. Beim Beweis dieses Satzes kommt man ohne diese Pedanteriejedo h ni ht weiter.Die Vollst�andigkeit der reellen Zahlen dr�u kt si h darin aus, dass jede na h oben be-s hr�ankte Menge reeller Zahlen eine kleinste obere S hranke, das Supremum, besitzt.Wir kommen nun zum eigentli hen Beweis des Satzes.Sei (xn)n2N eine monoton wa hsende und na h oben bes hr�ankte Folge. Wir be-tra hten nun die Menge aller Folgenglieder fxnjn 2 Ng. Dies ist eine na h obenbes hr�ankte Teilmenge der reellen Zahlen. Da die reellen Zahlen vollst�andig sind,existiert eine kleinste obere S hranke, die wir S nennen.Da (xn)n2N monoton w�a hst, wird die Di�erenz S � xn mit wa hsendem n im-mer kleiner. F�ur gro�es n wird die Di�erenz beliebig nahe an Null sein. Die Folgekonvergiert gegen S. 2BEISPIEL 7:Die harmonis he Folge � 1n�n2N ist monoton fallend und na h unten dur hNull bes hr�ankt, also muss sie konvergent sein.BEMERKUNG: : An dieser Stelle ist ni ht wi htig, dass Null die gr�o�te un-tere S hranke der Folge ist, ents heidend ist nur, dass eine untere S hran-ke existiert. Wir h�atten also genauso die S hranke �1 oder �13 w�ahlenk�onnen.2In der Anwendung besteht ein ents heidender qualitativer Unters hied oft au h darin, ob eineFolge gegen Null konvergiert oder ni ht. Man stelle si h beispielsweise eine Folge vor, die dieAnzahl der Individuen einer bestimmten Art im Laufe der Zeit darstellt. Stellen wir uns die Frage,ob die Art austerben wird, dann m�ussen wir nur wissen, ob der Grenzwert Null ist (dann w�urdesie aussterben) oder ob er unglei h Null ist (dann stirbt sie ni ht aus). Bei unserer Fragestellungist es also irrelevant, wie gro� der Grenzwert wirkli h ist. Wi htig ist nur, ob er Null ist oder ni ht.Nat�urli h m�usste man an dieser Stelle begr�unden, weshalb eine bestimmte Folge gerade dieAnzahl der Individuen einer bestimmten Art im Laufe der Zeit bes hreiben sollte. Diese Frage istwi htig. Wir werden ihr deshalb die n�a hsten beiden Kapitel widmen, kehren nun aber zuerst zurMathematik zur�u k.

5.3. MONOTONE KONVERGENZ 63BEISPIEL 8:Die geometris he Folge (qn)n2N ist f�ur 0 < q < 1 monoton fallend undna h unten dur h Null bes hr�ankt, also muss sie ebenfalls konvergent sein.BEISPIEL 9:Wir hatten in Kapitel 4 rekursiv die Folgean+1 = an2 + 1an mit a1 = 2de�niert und gezeigt, dass sie streng monoton fallend und na h unten dur h1 bes hr�ankt ist. Aus Satz 2 folgt, dass sie konvergiert.Wissen wir erst einmal, dass die Folge konvergiert, k�onnen wir au h IhrenGrenzwert, den wir mit � bezei hnen, bere hnen:an+1 = an2 + 1an )limn!1 an+1 = limn!1 an2 + limn!1 1an )� = �2 + 1� ,�2 = �22 + 1 ,�1=2 = �p2Der gesu hte Grenzwert mu� also entweder +p2 oder �p2 sein. Zu Be-ginn von Kapitel 5.2 hatten wir s hon gezeigt, dass eine Folge nur einenGrenzwert haben kann. Da die Folge aber, wie gezeigt, na h unten dur h 1bes hr�ankt ist, mu� der Grenzwert der Folge +p2 sein. 2Vorsi ht: Bei dem eben benutzten Verfahren zur Grenzwertbestimmungist es unerl�a�li h zuerst zu zeigen, dass die Folge konvergiert. Wir betra htendazu folgendes Beispiel:Die alternierende Folge ((�1)n)n2N l�a�t si h au h rekursiv de�nieren dur h:an+1 = �an mit a1 = �1Nimmt man an, der Grenzwert w�are a, so lieferte die glei he Methode:limn!1 an+1 = limn!1 an )a = �a ,2a = 0G�abe es also einen Grenzwert, dann m�usste er glei h 0 sein. Das n�utzt unsallerdings ni ht viel, denn die alternierende Folge ((�1)n)n2N divergiert.BEISPIEL 10: Unendli her Kettenbru h:Wir wollen den Wert des unendli hen Kettenbru hs bere hnen:1 + 11 + 11 + 11 + � � �

64 KAPITEL 5. GRENZWERTEDie Folge, die diesen Kettenbru h darstellt, ist rekursiv de�niert dur h:an+1 = 11 + an mit a1 = 1 :Wir wollen den Satz �uber monotone Konvergenz anwenden, stellen aller-dings fest, dass die Folge gar ni ht monoton ist. Dies sieht man, wenn mansi h die ersten Folgenglieder aufs hreibt.a1 = 1 a2 = 12 = 0:5a3 = 23 = 0:66666:::: a4 = 35 = 0:6a5 = 58 = 0:625 a6 = 813 = 0:61538::::a7 = 1321 = 0:61904:::: a8 = 2134 = 0:61764::::a9 = 3455 = 0:61818:::: a10 = 5589 = 0:61797::::Um den Satz �uber monotone Konvergenz anwenden zu k�onnen, betra htenwir die geraden Folgenglieder getrennt von den ungeraden Folgengliedern.Es l�a�t si h zeigen:1. Die Folge der geraden Folgenglieder (a2n)n2N ist monoton wa hsend,die Folge der ungeraden Folgenglieder (a2n+1)n2N ist monoton fal-lend.2. Sowohl die Folge der geraden Folgenglieder (a2n)n2N als au h dieFolge der ungeraden Folgenglieder (a2n+1)n2N ist bes hr�ankt.Aus dem Satz �uber monotone Konvergenz folgt nun, dass sowohl die Folge(a2n)n2N als au h die Folge (a2n+1)n2N konvergiert. Es l�a�t si h weiter zei-gen, dass die beiden Grenzwerte �ubereinstimmen. Das bedeutet aber ni htsanderes, als dass die Folge (an)n2N selbst konvergiert.Wie in Beispiel 9 k�onnen wir nun den Grenzwert � bere hnen.an+1 = 11 + an )limn!1 an+1 = limn!1 11 + an )� = 11 + � ,�1=2 = �1�p52 (5.9)Der gesu hte Grenzwert muss also entweder �1 oder �2 sein. Da �2 < 0, dieFolge (an)n2N aber dur h Eins na h unten bes hr�ankt ist, kann �2 ni htder Grenzwert sein. Der Grenzwert des Kettenbru hes ist also � = �1+p52 .BEMERKUNG: Seit der Antike gilt der goldene S hnitt als ausgespro- hen harmonis hes Teilungsverh�altnis zweier Gr�o�en. Im goldenen S hnittverhalten si h die beiden Ma�zahlen gerade wie 1 : � = 1 : 0:618 : : :

5.4. REIHEN 655.4 ReihenOft interessiert man si h ni ht nur f�ur das Verhalten einer Folge (x�)�2N selbst,sondern au h f�ur die Folge der Teilsummen Pn�=1 x� .Die Folge (Pn�=1 x�)n2N kann wie jede \normale" Folge konvergieren. In diesemFall s hreibt man limn!1 nX�=1x� = 1X�=1x� : (5.10)BEISPIEL 11:Die s hon in Kapitel 1.5 erw�ahnte \Ku henst�u kreihe":1X�=0�12��BEISPIEL 12:Die geometris he Reihe3 konvergiert f�ur �1 < q < 1 mit dem Grenzwert1X�=0 q� = 11� q : (5.11)Beweis:Wir hatten ebenfalls in Kapitel 1.5 gezeigt, dass f�ur �1 < q < 1 gilt:nX�=0 q� = 1� qn+11� q :Der dort s hon angedeutete Grenz�ubergang n!1 liefert dann die Behaup-tung. 2BEISPIEL 13:Die Reihe P1�=0(�1)� ist divergent.BEISPIEL 14:Die Exponentialreihe ist konvergent. Ihr Grenzwert ist die Eulers heZahl e, 1X�=0 1�! = e = 2:718281 : : : : (5.12)Notiz:Wenn die Folge der Teilsummen konvergiert, muss die zugrundeliegende Folge(xn)n2N gegen Null konvergieren.Die Umkehrung ist jedo h fals h: Wenn (xn)n2N gegen Null konvergiert mussdie zugeh�orige Reihe no h lange ni ht konvergieren.Dies zeigt das folgende Beispiel:3Man bea hte, dass bei der geometris hen Reihe der Lau�ndex na h allgemein �ubli her Kon-vention bei � = 0 beginnt.

66 KAPITEL 5. GRENZWERTEBEISPIEL 15: Die harmonis he Reihe P1�=1 1� divergiert.Beweis:Wir zeigen, dass die Reihe �uber jede no h so gro�e S hranke w�a hst. SeiK > 0 eine beliebig gro�e S hranke. Dann gilt f�ur jedes n 2 N mit n > 2K:nX�=1 1� = 1 + 12 + �13 + 14�| {z }> 14+ 14= 24 +�15 + : : :+ 18�| {z }> 18+:::+ 18= 48 + : : :+ � 12n + 1 + : : :+ 12n+1 �| {z }> 12n+1+:::+ 12n+1= 2n2n+1> 0 + 12 + 24 + 48 + : : :+ 2n2n+1= n+ 12 > KDamit w�a hst die Folge der TeilsummenPn�=1 1� �uber alle S hranken undkann deshalb keinen Grenzwert haben. 2BEMERKUNG: : Wie langsam dieses Anwa hsen jedo h ges hieht, zei-gen die folgenden, jeweils auf drei Kommastellen gerundeten Zahlenwerte:P100�=1 1� � 5; 187, P1000�=1 1� � 7; 486, P10000�=1 1� � 9; 788. Dieses Beispielverdeutli ht damit au h re ht eindr�u kli h, dass ein mathematis h sti hfe-stes Ergebnis | hier das Anwa hsen der Reihe �uber alle S hranken | ni htdirekt aus den numeris hen Daten ersi htli h ist. Aufgrund der Daten h�atteman wohl eher vermutet, dass die harmonis he Reihe konvergent ist.5.5 Divergenz gegen Unendli hDe�nition (Divergenz gegen Unendli h):Gibt es f�ur jede S hranke K 2 R eine nat�urli he Zahl nK , so dass xn > K f�uralle n � nK , sagt man, die Folge divergiert gegen unendli h und s hreibtlimn!1xn =1 : (5.13)In glei her Weise de�niert man die Divergenz gegen minus unendli h.BEISPIEL 16: limn!1n = +1BEISPIEL 17: limn!1(�n) = �1BEISPIEL 18:Die Folge ((�1)nn)n2R divergiert. Dabei konvergiert sie weder gegen +1no h gegen �1, da sie alterniert.Ohne Beweis geben wir folgenden Satz an:Satz:Es sei xn > 0 f�ur alle n. Dann gilt:limn!1 xn = 0 , limn!1 1xn =1

5.5. DIVERGENZ GEGEN UNENDLICH 67W�uns henswert w�are es, f�ur den Grenzwert 1 �ahnli he Re henregeln zu haben,wie sie f�ur endli he Grenzwerte gelten. Die Besonderheit von dem Grenzwert 1liegt jedo h gerade darin, dass es sol he Re henregeln nur zum Teil gibt. Bei 1ist deshalb immer gr�o�te Vorsi ht geboten. Wir geben im Folgenden die F�alle an,in denen es Re henregeln gibt, ans hlie�end unbestimmte Ausdr�u ke, in denen eskeine Re henregeln gibt.Re henregeln f�ur Grenzwerte:Es sei �1 < a < +1. Dann gilt:Addition : a+1 = +11+1 = +1a�1 = �1�1�1 = �1Multiplikation : a � (�1) = � �1 f�ur a > 0�1 f�ur a < 0(+1)(+1) = +1(�1)(�1) = +1(�1)(+1) = �1Division : a�1 = 0�1a = � �1 f�ur a > 0�1 f�ur a < 0 (5.14)WICHTIG: Die S hreibweise a +1 = 1 bedeutet ni ht anderes, als dass auslimn!1 an = a und limn!1 bn =1 stets limn!1(an + bn) =1 folgt.Weiterhin hei�t a � (+1) =1 f�ur a > 0, dass mit a > 0 stetslimn!1(an � bn) =1folgt.BEISPIEL 19:limn!1(n2) = limn!1(n) � limn!1(n) =1 �1 =1Unbestimmte Ausdr�u ke von Grenzwerten:In den F�allen +1�1; 0(�1); 00 ; 11 ; 01; 10gibt es keine allgemeinen Re henregeln. Hier mu� man extrem aufpassen. Un-ters hiedli he Folgen k�onnen hier zu unters hiedli hen Ergebnissen f�uhren.

68 KAPITEL 5. GRENZWERTEBEISPIEL 20: \1�1" limn!1(2n� n) =1limn!1(n� 2n) = �1limn!1((n+ 7)� n) = 7BEISPIEL 21: \0 � 1" limn!1� 1n2 � n� = 0limn!1� 1n � n� = 1limn!1� 1n � n2� =15.6 Aufgaben1. (Grenzwerte von Folgen) Bere hen Sie die Grenzwerte folgender Folgen:(a) an = 1=n(b) xn = n+ 1n� 1 ( ) yt = t2 � 5t+ 103t� 22. (Grenzwerte von Reihen) Bestimmen Sie die Grenzwerte folgender Reihen! Neh-men Sie dazu au h das Skript zur Hilfe.(a) sm = mXi=1 1=i (b) qm = mX�=1 13�3. (Grenzwerte von Folgen) Wel hen Grenzwert besitzen die einzelnen Folgen? Sindsie bes hr�ankt? Begr�unden Sie ihre Antwort mathematis h!(a) an = 500(b) bn = n2 � 104n3 + n2 � 100 ( ) n = 6n10 � n43n10 + n(d) yn+1 = �12 � yn4. (geometris he Reihe) Wenn die Erd�olvorr�ate bei konstantem gegenw�artigen Jah-resverbrau h no h f�ur 30 Jahre ausrei hen, um wieviel Prozent m�usste si h dannvon Jahr zu Jahr der Verbrau h reduzieren, damit sie f�ur immer ausrei hen w�urden?Siehe au h Skript Kapitel 1.5.1!

Kapitel 6Iterierte AbbildungenDie Welt um uns herum ist ni ht statis h sondern ver�andert si h andauernd. Insbe-sondere ist \Leben" ni ht ohne Sto�we hsel denkbar und impliziert deshalb perma-nente Ver�anderung oder Dynamik. Es ist daher ni ht verwunderli h, dass zentraleFragen der Biologie dynamis he Vorg�ange betre�en. Diese laufen auf unters hied-li hsten Ebenen und Zeitskalen ab und werden in vers hiedenen Spezialdisziplinenbehandelt | von der Molekular- und Mikrobiologie �uber die P anzen- und Tier-physiologie, Entwi klungsbiologie, Neurobiologie, Immunologie bis hin zur �Okologie,Epidemiologie und organismis hen Evolutionsbiologie.Wie aber soll man dynamis he Vorg�ange mathematis h bes hreiben?Zwei Alternativen bieten si h an und werden im Rahmen dieser Vorlesung im Detaildiskutiert: Im ersten Zugang wird die Zeit t wie in der Physik als kontinuierli heVariable behandelt.1 Mathematis h gesehen f�uhrt diese Art der Modellierung derZeit auf das Konzept Di�erentialglei hung, das wir in den Kapiteln 14 bis 16ausf�uhrli h vorstellen und behandeln werden.Im zweiten Zugang wird die Zeit in diskrete S hritte eingeteilt. Dies entspri ht zwarni ht ihrer physikalis hen Natur, ist aber im Rahmen vereinfa hter ph�anomenologi-s her Bes hreibungen oft extrem hilfrei h. Man stelle si h beispielsweise eine Insek-tenart vor, bei der die adulten Tiere jeweils im Herbst Eier legen und dann sterben.Die Zahl der Insekten l�a�t si h dann als diskrete Abfolge x1, x2, x3, : : : au�assen,wobei der Index t das jeweilige Jahr bezei hnet. In dieser Bes hreibung dauert jederZeits hritt ein Jahr | um vieles l�anger als die f�ur die mikroskopis hen Entwi k-lungsprozesse relevanten Zeitskalen, aber gut geeignet, um populationsbiologis heFragen zu beantworten: W�a hst die Population, strebt sie einem Glei hgewi ht zuoder stirbt sie aus? Wie reagiert die Insektenpopulation auf Ver�anderungen ihrerUmwelt? ...In unserem Modell wollen wir weiterhin annehmen, dass die Insektenzahl in aufein-ander folgenden Jahren dur h eine einfa he Rekursionsbeziehung gegeben ist,xt+1 = f(xt) : (6.1)Die Gr�o�e der Insektenpopulation im Jahr vor dem Beginn der Untersu hung wollenwir mit x0 bezei hnen.1Eine Quantisierung der Zeit in diskrete Zeits hritte wird in der physikalis hen Literatur imZusammenhang mit Modellen der Quantengravitation diskutiert. Auf der f�ur biologis he Prozesserelevanten Ebene gibt es jedo h keine Indizien, die gegen einen kontinuierli hen Zeit u� spre hen.69

70 KAPITEL 6. ITERIERTE ABBILDUNGENSetzen wir in Glei hung (6.1) sukzessive t = 0; 1; 2; : : : ein, k�onnen wir sofort dieAnzahl der Insekten f�ur alle zuk�unftigen Jahre bere hnen:x1 = f(x0)x2 = f(x1) = f(f(x0))x3 = f(x2) = f(f(x1)) = f(f(f(x0)))... ...xt = f(xt�1) = f(f(xt�2)) = : : : (6.2)Da die Abbildung f in jedem einzelnen Zeits hritt wieder auf si h selbst angewendetwird, bezei hnet man (6.1) au h als Iterierte Abbildung.2 In diesemModell habenwir stills hweigend vier wi htige Annahmen getro�en:� Es gibt keine explizit zeitabh�angigen Ein �usse auf das Wa hstum der Popu-lation | stimmt die Insektenzahl in zwei beliebigen Jahren t0 und t00 �uberein,das hei�t xt0 = xt00 , so gilt na h Glei hung (6.1) au h xt0+1 = xt00+1.� Die Populationsgr�o�e xt+1 h�angt nur vom Wert xt ab, andere Gr�o�en wie dasZahlenverh�altnis M�ann hen versus Weib hen werden verna hl�assigt. Der f�urdie betra htete Dynamik relevante Zustand (siehe dazu au h Kapitel 3.4.4)ist also dur h die Gr�o�e der Population vollst�andig bes hrieben.� Die Dynamik ist deterministis h, zuf�allige Fluktuationen sind ausges hlos-sen.� Die Anzahl der Insekten in fr�uheren Jahren t0 < t hat keinen unmittelbarenEin uss auf xt+1 sondern wirkt nur verm�oge der in (6.2) skizzierten Wirkungs-kette. Da die Bewegungsglei hung (6.1) selbst nur jeweils einen Zeits hrittzur�u kbli kt, sagen wir au h, dass die Iterierte Abbildung von 1.Ordnungist.3Als L�osung einer Iterierten Abbildung ergibt si h bei vorgegebener Anfangsbe-dingung x0 eine Folge x1; x2; x3; : : ::2Subtrahiert man xt von beiden Seiten der Bewegungsglei hung (6.1) und de�niert ans hlie�end~f(x) = f(x)� x, kann man die urspr�ungli he Glei hung au h alsxt+1 � xt = f(xt)� xt = ~f(xt) (6.3)s hreiben, und spri ht dann von einer Di�erenzenglei hung, da auf der linken Seite von Glei- hung (6.3) die Di�erenz der Gr�o�e x zu zwei aufeinanderfolgenden Zeiten steht.Iterierte Abbildung und Di�erenzenglei hung sind �aquivalente Bes hreibungen: Aus jeder Funk-tion f(x) einer Iterierten Abbildung erh�alt man dur h ~f(x) = f(x) � x die die zugeordnete Di�e-renzenglei hung de�nierende Funktion ~f(x); und umgekehrt erh�alt man aus jeder Funktion g(x)einer Di�erenzenglei hung dur h ~g(x) = g(x) + x die die zugeordnete Iterierte Abbildung harak-terisierende Funktion ~g(x).Die Interpretation beider Bes hreibungen unters heidet si h jedo h: die Motivation f�ur eine Ite-rierte Abbildung ist die Bes hreibung der s hrittweisen Entwi klung eines dynamis hen Systems.Dagegen wird in einer Di�erenzenglei hung die Ver�anderung der dynamis hen Variablen von Zeit-s hritt zu Zeits hritt betont.3Im Abs hnitt 6.2 werden wir ein au h historis h wi htiges Modell der Form xt+1 = f(xt; xt�1)kennen lernen. Modelle dieser Art, in denen die Funktion f zwei Argumente hat, werden Iterier-te Abbildungen zweiter Ordnung genannt. Entspre hend werden Iterierte Abbildungen h�ohererOrdnung de�niert.

71Notiz:Die L�osung einer Iterierten Abbildung xt+1 = f(xt) bei vorgegebenerAnfangs-bedingung x0 ist eine Folge (xt)t2N.Die Rekursionsvors hrift einer rekursiv de�nierten Folge kann damit au h alseine Iterierte Abbildung interpretiert werden.BEMERKUNG: Wie aus Kapitel 4 bekannt ist, sind Folgen Funktionen, deren De-�nitionsberei h die nat�urli hen Zahlen sind. Damit tritt das Konzept Funktion inIterierten Abbildungen in zwei vollkommen unters hiedli hen Bedeutungen auf, dieauf keinen Fall verwe hselt werden d�urfen:a) In jedem Zeits hritt wird der neue Wert von x (zur Zeit t+1) als Funktion f(x)des alten Wertes x (zur Zeit t) bere hnet.b) Daraus ergibt si h eine Dynamik f�ur x als Funktion xt der Zeit t.Iterierte Abbildungen k�onnen h�o hst unters hiedli he L�osungen erzeugen. Die ein-fa hsten L�osungen entspre hen (biologis hen) Glei hgewi hten, sind also zeitli hkonstant:De�nition (Fixpunkt und Fixpunkt-L�osung):Erf�ullt die Zahl x? 2 R die Glei hungf(x?) = x? ; (6.4)so hei�t sie Fixpunkt der Funktion f(x).Die zugeh�orige konstante L�osung (x?; x?; x?; : : :) der Iterierten Abbildungxt+1 = f(xt) wird Fixpunkt-L�osung genannt.BEMERKUNG: Ans hauli h interpretiert bedeutet Glei hung (6.4), dass Fixpunktegenau den S hnittpunkten des Graphen von f mit der Winkelhalbierenden y = xentspre hen (Siehe au h Abbildung 6.1).Nimmt das System den Wert x? zu einer gewissen Zeit t an, so wird es dies wegen(6.1) au h im n�a hsten Zeitpunkt t+1 tun, dann aber au h zur Zeit t+2 et ., unddamit au h zu allen na hfolgenden Zeiten. Dies begr�undet den Begri� \Fixpunkt-L�osung einer Iterierten Abbildung."BEMERKUNG: Je na h Form des Graphen von f besitzt eine Iterierte Abbildungkeine, eine oder mehrere Fixpunkt-L�osungen.Ein f�ur das Verst�andnis dynamis her Prozesse zweites wi htiges Konzept ist das derStabilit�at einer L�osung: l�auft das System na h einer beliebigen kleinen �au�erenSt�orung wieder zur urspr�ungli hen L�osung zur�u k, so nennt man die L�osung asym-ptotis h stabil, bewirkt eine St�orung, dass si h das System von dieser L�osungwegbewegt, so hei�t die L�osung instabil. F�uhrt eine kleine St�orung des Systemsdazu, dass si h die neue L�osung weder von der urspr�ungli hen L�osung wegbewegtno h si h ihr n�ahert, so nennt man die urspr�ungli he L�osungmarginal stabil. Da-bei steht insbesondere die Stabilit�at von Fixpunkt-L�osungen im Vordergrund vielerUntersu hungen.In diesem Kapitel untersu hen wir lineare Iterierte Abbildungen. Bei diesenist f eine Funktion f(x) = ax + b, die linear mit x w�a hst oder f�allt. Siehe au hKapitel 2.3.1. F�ur diese Systeme existiert eine elegante Theorie zur Bestimmung

72 KAPITEL 6. ITERIERTE ABBILDUNGEN0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
f(x t
)
xt
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
x t
tAbbildung 6.1: Die Iterierte Abbildung xt+1 = 1:5 �xt(1�xt). Links ist die der IteriertenAbbildung zu Grunde liegende Funktion f(x) = 1:5�x(1�x) zusammen mit dem gestri heltdargestellten Graphen der Funktion g(x) = x abgebildet. Die zus�atzli h eingezei hneteZi k-Za k-Linie stellt die sukzessive Zeitentwi klung des Systems dar. Ausgehend vomStartwert x0 = 0:8 wird im ersten Zeits hritt der Wert x1 = 1:5 � 0:8 � (1 � 0:8) = 0:24errei ht, im zweiten S hritt der Wert x2 = 1:5 �0:24 � (1�0:24) = 0:2736, im dritten S hrittder Wert x3 = : : :Re hts ist die L�osung der Iterierten Abbildung dargestellt. Na h unserer Spra hregelung istdies also eine Folge, deren rekursive De�nition gerade mit der Iterationsvors hrift xt+1 =1:5�xt(1�xt) �ubereinstimmt. Die einzelnen Glieder xt entspre hen der ersten Komponenteder in der linken Abbildung dargestellten S hnittpunkte (xt; xt+1℄ der Zi k-Za k-Linie mitdem Graphen der Funktion f . Im hier gezeigten Fall n�ahert si h xt f�ur gro�e Zeiten timmer n�aher an den Fixpunkt x? = 1=3 der Funktion f an.In der linken Abbildung kann man diese Entwi klung wie folgt konstruieren: Man startetauf der Abszisse bei x0 = 0:8 und bewegt si h dann parallel zur Ordinate bis der Graph derFunktion f(x) errei ht ist. Der dabei gefundene Funktionswert f(x0) ist na h der De�nitioneiner Iterierten Abbildung der Startwert f�ur die n�a hste Iteration gem�a� x1 = f(x0). DerS hnittpunkt liegt also im Koordinatensystem gerade am Ort (x0; x1). Um x2 = f(x1)zu bere hnen, muss man die gerade verwendete Prozedur wiederholen, nun aber mit demStartwert x1, womit ein n�a hster S hnittpunkt am Ort (x1; x2) gefunden wird, und soweiter. Diese Prozedur kann man vereinfa hen wenn man bea htet, dass eine zur Abszisseim Abstand z parallele Gerade die Winkelhalbierende genau im Punkt (z; z) s hneidet.Damit brau ht man den Wert f(xt) ni ht an der Ordinate ablesen und f�ur die n�a hsteIteration auf die Abszisse �ubertragen, sondern kann einfa h in der angegebenen Zi k-Za k-Linie vorans hreiten. Jeder auf diese Art sukzessive gewonnene S hnittpunkt mit demGraphen der Funktion f entspri ht einem Glied der L�osung (xt). �Uberzeugen Sie si hselbst, dass dieses letztli h einfa he Verfahren die ri htige Zeitentwi klung liefert!von L�osungen. In Kapitel 7 werden wir ni htlineare Systeme kennen lernen.Bei diesen ist f eine ni htlineare Funktion. Eine s h�one L�osungstheorie gibt es hierleider ni ht mehr, daf�ur treten eine Reihe interessanter Ph�anomene auf, die wir kurzbespre hen werden. Gerade f�ur die Biologie sind ni htlineare Iterierte Abbildungenvon besonderer Bedeutung, da viele biologis he Regelkreise ni htlineare Prozessebeinhalten.Bei der Untersu hung von Iterierten Abbildungen werden wir meistens die folgendenFragen behandeln:Allgemeine L�osung: Wel he L�osungen existieren �uberhaupt?Anfangswertproblem:Wel he spezielle L�osung ergibt si h bei vorgegebenem An-fangswert x0?Langzeitverhalten: Wie verh�alt si h die L�osung f�ur lange Zeiten? Strebt sie bei-

6.1. LINEARE ITERIERTE ABBILDUNGEN 1. ORDNUNG 73spielsweise einer Fixpunkt-L�osung oder einer periodis hen Oszillation zu?Existenz von Fixpunkten und Stabilit�at von Fixpunkt-L�osungen: Besitztdie Funktion f Fixpunkte? Wel he Fixpunkt-L�osungen sind stabil, wel he instabil?Wurde das Modell zur Bes hreibung von experimentellen Daten aufgestellt, so er-lauben die Antworten auf diese Fragen Vorhersagen �uber das zuk�unftige Verhaltendes betra hteten Systems. Diese k�onnen dann in weiteren Experimenten getestetwerden; Abwei hungen k�onnen ans hlie�end dazu verwendet werden, das Modell zuverbessern. Mit einem derart verfeinerten Modell lassen si h dann neue und pr�azi-sere Hypothesen aufstellen und wiederum experimentell testen : : :6.1 Lineare Iterierte Abbildungen 1. OrdnungIn diesem Abs hnitt bes h�aftigen wir uns mit den einfa hsten Iterierten Abbildun-gen:De�nition (Lineare Iterierte Abbildung 1.Ordnung):Sei t 2 N, x0 2 R und f : R ! R; x 7! f(x) eine Funktion, die linear mit xw�a hst oder f�allt, d.h. f(x) = ax+ b. Dann hei�txt+1 = f(xt)= axt + b (6.5)eine lineare Iterierte Abbildung 1.Ordnung.Ist b = 0, so nennt man die Iterierte Abbildung homogen, ist b 6= 0, so nenntman sie inhomogen.6.1.1 Homogene Iterierte Abbildungen 1. OrdnungWir betra hten die homogene Iterierte Abbildungxt+1 = axt : (6.6)BEMERKUNG: Diese Glei hung hat eine wi htige ni ht-biologis he Interpretation:Bei einem j�ahrli hen Zinssatz von z Prozent w�a hst ein Sparguthaben pro Jahr umden Faktor 1+ z=100. W�ahlt man also a = 1+ z=100, so bes hreibt (6.6) genau dasj�ahrli he Anwa hsen eines festverzinsli hen Guthabens mit Anfangswert x0.Allgemeine L�osung:Dur h Einsetzen erh�alt man:xt = axt�1 = a2xt�2 = : : : = atx0 (6.7)Zu vorgegebenem Anfangswert x0 lautet die L�osung also (x0at)t2N. Der Anfangs-wert x0 kann dabei eine beliebige reelle Zahl sein.Die homogene lineare Iterierte Abbildung xt+1 = axt hat die allgemeine L�osung(x0at)t2N mit x0 2 R.

74 KAPITEL 6. ITERIERTE ABBILDUNGENBEMERKUNG: Abh�angig vom Wert von x0 erh�alt man unters hiedli he L�osungen.Jede einzelne L�osung ist also dur h einen bestimmten Wert des Parameters x0 harakterisiert.BEMERKUNG: Lineare homogene Glei hungen wie (6.6) erf�ullen das Superposi-tionsprinzip: Sind (xt) und (yt) zwei L�osungen von (6.6), so ist au h die Summebeider L�osungen, also die Folge (zt) mit zt = xt + yt, wieder eine L�osung. ZeigenSie dies dur h Einsetzen!4Anfangswertproblem:In der Praxis soll man oft diejenige spezielle L�osung einer Iterierten Abbildungbestimmen, die dur h einen vorgegebenen Anfangswert x0 festgelegt wird. Im Fallder Glei hung (6.6) stellt dies allerdings kein Problem dar. Die spezielle L�osung zumAnfangswert x0 lautet ja gerade (x0at)t2N.Langzeitverhalten:1.Fall: a > 1 limt!1x0at = 8<: +1 f�ur x0 > 00 f�ur x0 = 0�1 f�ur x0 < 0Das Langzeitverhalten h�angt hier deutli h von der Wahl des Anfangswertes x0 ab!2.Fall: �1 < a < 1 limt!1 x0at = 0In diesem Fall konvergiert die L�osung unabh�angig vom Anfangswert gegen 0.3.Fall: a = 1 limt!1 x0at = x0:Dies ist der langweiligste Fall. Der Anfangswert bleibt f�ur alle Zeiten unver�andert.4.Fall: a � �1Ist zus�atzli h no h x0 6= 0, so divergiert die Folge.Fixpunkt-L�osungen und ihre Stabilit�atEin Fixpunkt x? muss die Glei hung f(x?) = x? erf�ullen, hier also ax? = x?.1.Fall: a 6= 1Der einzige Fixpunkt ist x? = 0. Die zugeh�orige Fixpunkt-L�osung (0; 0; 0; : : :) istna h De�nition genau dann asymptotis h stabil, wenn kleine St�orungen im Laufder Zeit wegged�ampft werden. Wie der Verglei h mit dem Unterpunkt \Langzeit-verhalten" zeigt, tritt diese Situation f�ur �1 < a < 1 ein. F�ur a > 1 oder a < �1wa hsen kleine St�orungen dagegen explosionsartig an, die Fixpunkt-L�osung ist dannalso instabil. Ist s hlie�li h a = �1, so ist die Fixpunkt-L�osung marginal stabil: ei-ne kleine St�orung " des Fixpunktes f�uhrt hier zu einer periodis hen Oszillation, beider aufeinanderfolgende Werte von x f�ur alle Zeiten zwis hen " und �" hin undherspringen.4Das Superpositionsprinzip ist von grundlegender Bedeutung in der Physik, gilt jedo h ni htf�ur ni htlineare Systeme. Au h dies k�onnen Sie sofort am Beispiel xt+1 = [xt℄2 na hre hnen.

6.1. LINEARE ITERIERTE ABBILDUNGEN 1. ORDNUNG 752.Fall: a = 1Hier ist jede reelle Zahl x ein Fixpunkt, wie wir au h s hon bei der Betra htungdes Langzeitverhaltens gesehen hatten. Da jedes x 2 R ein Fixpunkt ist, bleibt jedebeliebige St�orung f�ur alle Zeiten erhalten. Es liegt also marginale Stabilit�at vor,jedo h keine asymptotis he Stabilit�at.6.1.2 Inhomogene Iterierte Abbildungen 1. OrdnungWir betra hten nun die inhomogene Iterierte Abbildungxt+1 = axt + b : (6.8)Wie in Kapitel 6.1.1 k�onnen wir die L�osung von (6.8) explizit konstruieren:x1 = ax0 + bx2 = a(ax0 + b) + b = a2x0 + b(1 + a)x3 = a[a2x0 + b(1 + a)℄ + b = a3x0 + b(1 + a+ a2)... ...xt = atx0 + b[1 + a+ : : :+ at�2 + at�1℄= atx0 + b at � 1a� 1 (6.9)wobei wir im letzten S hritt die geometris he Reihe 1+ a+ : : :+ at�2+ at�1 wie inGlei hung (1.35) vereinfa ht haben. Wir erhalten damit:Die inhomogene lineare Iterierte Abbildung xt+1 = axt+b hat bei vorgegebenemAnfangswert x0 die L�osung �x0at + bat�1a�1 �t2N.Die inhomogene lineare Iterierte Abbildung besitzt also eine kompliziertere L�osungals die zugeh�orige homogene Iterierte Abbildung. Beide L�osungen sind jedo h engmiteinander verwandt:Satz (L�osung homogener und inhomogener Iterierter Abbildungen I):Sei (ht)t2N die allgemeine L�osung der homogenen Iterierten Abbildungxt+1 = axtund (it)t2N eine spezielle L�osung der inhomogenen Iterierten Abbildungxt+1 = axt + b :Dann ist (zt)t2N = (ht)t2N + (it)t2N die allgemeine L�osung der inhomogenenIterierten Abbildung.Beweis:Wir setzen (6.5) und (6.8) in (zt)t2N = (it)t2N + (ht)t2N ein und erhalten:zt+1 = it+1 + ht+1= ait + b+ aht= a(ht + it) + b= azt + bDamit erf�ullt (zt)t2N die inhomogene Glei hung (6.8). 2

76 KAPITEL 6. ITERIERTE ABBILDUNGENKennen wir also die allgemeine L�osung der homogenen Iterierten Abbildung (6.5),so gen�ugt es, eine einzige spezielle L�osung der inhomogenen Glei hung zu ermitteln.Alle anderen L�osungen k�onnen dann als Summe dieser speziellen L�osung und einerL�osung der homogenen Iterierten Abbildung ges hrieben werden.5WICHTIG: Die allgemeine L�osung einer homogenen Iterierten Abbildung 1.Ord-nung ist ni ht eindeutig festgelegt, sondern hat einen freien Parameter, den wir nennen wollen. Variiert man diesen Parameter, so erh�alt man unters hiedli he spezi-elle L�osungen. Erst dur h die Vorgabe einer bestimmten Anfangsbedingung x0 wird eindeutig festgelegt. In Abs hnitt 6.1.1 trat ein Spezialfall auf: Der Parameter war identis h mit x0. Im Allgemeinen ist dies jedo h ni ht der Fall. Wendet mandeshalb den obigen Satz auf ein konkretes Anfangswertproblem an, muss der Para-meter so festgelegt werden, dass die Gesamtl�osung die Anfangsbedingung erf�ullt.Wir werden dies nun am Beispiel der Glei hung (6.8) explizit demonstrieren.Allgemeine L�osung:Die allgemeine L�osung der homogenen Iterierten Abbildungen (6.6) haben wir s honin Unterkapitel 6.1.1 bestimmt. Wir ben�otigen also \nur no h" eine spezielle L�osungxsp der inhomogen Glei hung, um die allgemeine L�osung der inhomogenen Glei- hung zu erhalten. Wir versu hen, diese L�osung heuristis h zu bestimmen, ma henalso (ratend!) einen Ansatz, den wir ans hlie�end veri�zieren. Dies ist eine in derMathematik oft verwendete Strategie.Der einfa hste Versu h besteht darin, f�ur die spezielle L�osung (xsp; xsp; xsp; : : :) eineFixpunkt-L�osung anzusetzen. Setzen wir f(x) = ax + b in die Fixpunktglei hung(6.4), erhalten wir axsp + b = xsp und daraus f�ur a 6= 1xsp = b1� a : (6.10)Den \pathologis hen" Fall a = 1 wollen wir von nun an ni ht weiter verfolgen. Einespezielle L�osung der inhomogenen Glei hung ist also ( b1�a ; b1�a ; b1�a ; : : :) oder kurzges hrieben � b1�a�t2N.Mit Hilfe des obigen Satzes k�onnen wir nun die allgemeine L�osung der inhomogenenGlei hung als Summe der gefundenen speziellen L�osung und der allgemeinen L�osungder homogenen Glei hung (nun dur h den Parameter parametrisiert) angeben:Die inhomogene lineare Iterierte Abbildung xt+1 = axt + b hat die allgemeineL�osung � at + b1� a�t2N : (6.11)Anfangswertproblem:Ist ein Anfangswert x0 f�ur die inhomogene Glei hung vorgegeben, muss der Para-meter so gew�ahlt werden, dass die L�osung zur Zeit t = 0 mit diesem Anfangswert5Der enge Zusammenhang zwis hen L�osungen homogener und inhomogener linearer Systemetri�t au h auf lineare Glei hungen und lineare Di�erentialglei hungen zu und vereinfa ht das L�osenderartiger Systeme ganz erhebli h. Die Omnipr�asenz linearer Glei hungen in allen Naturwissen-s haften ist zu einem guten Teil auf diese Eigens haft und das Superpositionsprinzip (siehe Kapitel6.1.1) zur�u kzuf�uhren. Bei ni htlinearen Systemen sind beide ni ht mehr erf�ullt.

6.1. LINEARE ITERIERTE ABBILDUNGEN 1. ORDNUNG 77�ubereinstimmt. Aus Glei hung (6.11) folgt dann a0 + b1� a = x0 :Daraus erhalten wir = x0 � b1�a und damit s hlie�li h aus (6.11)xt = [(x0 � b1� a )at + b1� a ℄ = x0at + bat � 1a� 1 :Diese L�osung stimmt genau mit der dur h explizite Konstruktion gefundenen Glei- hung (6.9) �uberein. An diesem Beispiel wird au h deutli h, warum der Parameterder allgemeinen L�osung der homogenen Glei hung ni ht mit x0 identi�ziert werdendarf: Erst die Summe dieser L�osung und der speziellen L�osung der inhomogenenGlei hung soll ja die Anfangsbedingung erf�ullen!Langzeitverhalten:Die L�osungen der homogenen und inhomogenen Glei hung unters heiden si h um dieFixpunkt-L�osung ( b1�a ; b1�a ; b1�a ; : : :). Abgesehen von dieser Vers hiebung verhaltensi h die L�osungen aber vollkommen identis h. Das Langzeitverhalten der inhomoge-nen Glei hung weist deshalb exakt die glei hen Charakteristika und Abh�angigkeitenvom Parameter a wie im homogenen Fall auf. Allerdings ist zu bea hten, dass wegender Vers hiebung um b1�a im ersten Fall (a > 1) nun das Langzeitverhalten ni htmehr davon abh�angt, ob x0 gr�o�er oder kleiner als Null ist, sondern ob x0 gr�o�eroder kleiner als x0 = b1�a ist. Und au h dies ist ans hauli h verst�andli h, handeltes si h do h beim Wert Null um den Fixpunkt der homogenen, beim Wert b1�a umden Fixpunkt der inhomogenen Glei hung.Wegen seiner enormen Wi htigkeit wollen wir die Kernaussage des Satzes �uber denZusammenhang von L�osungen homogener und inhomogener linearer Iterierter Ab-bildungen abs hlie�end no h in einer zweiten, �aquivalenten Form vorstellen:Satz (L�osung homogener und inhomogener Iterierter AbbildungenII):Die beiden Folgen (vt)t2N und (wt)t2N seien L�osungen der inhomogenen linea-ren Iterierten Abbildung xt+1 = axt + b :Dann ist die Di�erenz dieser beiden Folgen, (yt)t2N = (vt)t2N � (wt)t2N, eineL�osung der zugeh�origen homogenen linearen Iterierten Abbildungxt+1 = axt :Beweis:Wir setzen (6.5) und (6.8) in (yt)t2N = (vt)t2N � (wt)t2N ein und erhalten:yt+1 = vt+1 �wt+1= [avt + b℄� [awt + b℄= a[vt �wt℄= aytDamit erf�ullt (yt)t2N die homogene Glei hung (6.5). 2

78 KAPITEL 6. ITERIERTE ABBILDUNGEN6.2 Mathematik und Biologie: Populationsmodelle6.2.1 Zellpopulation mit exponentiellem Wa hstumAnnahmen: Pro Zeits hritt teile si h jede Zelle einer vorgegebenen Zellpopulationgenau einmal. Weiterhin seien alle Zellen unsterbli h. Gesu ht ist die Anzahl derZellen als Funktion der Zeit.Modell: Die Anzahl der Zellen zum Zeitpunkt t sei xt. Aus den Annahmen folgt,dass si h im n�a hsten Zeits hritt t+1 die Anzahl der Zellen verdoppelt hat. Darausergibt si h die Dynamik xt+1 = 2xt : (6.12)Dies ist eine lineare homogene Iterierte Abbildung 1.Ordnung.Allgemeine L�osung: Na h den Ergebnissen des vorherigen Abs hnitts ist die all-gemeine L�osung (x02t)t2N. Dabei ist x0 die Zahl der Zellen zur Zeit Null. Die Zahlder Zellen zur Zeit t betr�agt also xt = x02t : (6.13)Die Zellpopulation zeigt damit exponentielles Wa hstum. Dieses Verhalten ent-spri ht dem klassis hen Bev�olkerungsmodell von Malthus [1766-1834℄.Spezielle L�osung: Zum Anfangswert x0 = 1 erh�alt man die spezielle L�osung(2t)t2N. Sind dagegen zur Zeit t = 0 beispielsweise 5 Zellen vorhanden, so lautetdie spezielle L�osung (5 � 2t)t2N. Zum Anfangswert x0 = 0 ist die spezielle L�osungdie Folge, bei der alle Folgenglieder Null sind, (0)t2N.Langfristiges Verhalten: Beim Anfangswert Null ist die Populationsgr�o�e f�uralle Zeiten Null | von ni hts kommt ni hts, au h keine Bakterien. Bei jedem ande-ren positiven Anfangswert w�a hst die Population sehr ras h gegen Unendli h. Wirverdeutli hen dies mit folgendem Zahlenspiel:Die Gr�o�e eines Bakteriums liegt im Berei h eines Mikrometers (ein tausendstelMillimeter oder 10�6 Meter). Sein spezi�s hes Gewi ht liegt grob ges h�atzt im Be-rei h von einem Gramm pro Kubikzentimeter, woraus eine Masse von ir a 10�18Kilogramm folgt. Bei einer Generationszeit von 2 Stunden w�urden aus einer Zellein einem Tag 212 � 10�18 � 10�14 Kilogramm, in einer Wo he ir a 1000 Tonnen,und na h einem Monat 1068 Kilogramm Bakterien entstehen. Zum Verglei h: DieMasse der Erde betr�agt weniger als 1025 Kilogramm...Ab einer gewissen Populationsgr�o�e m�ussen also wa hstumslimitierende Faktorenwie ein begrenztes Nahrungsangebot ins Spiel kommen. Diese k�onnen beispielsweisedur h die sogenannte Logistis he Glei hung modelliert werden, die wir im n�a hstenKapitel kennen lernen werden.BEMERKUNG: Im hier vorgestellten Modell entspra h die dynamis he Variablex der Anzahl der Bakterien und war damit eine nat�urli he Zahl, die si h pro Ge-neration verdoppelt. Diesen Ansatz kann man verallgemeinern und beispielsweisedie Gesamtmasse der Bakterien oder das Volumen der Population als dynamis heVariable ben�utzen, so dass x nun eine reelle Zahl ist.BEMERKUNG: Statt der Generationszeit k�onnte man jedes beliebige Zeitintervallals Grundlage der experimentellen Zeitmessung w�ahlen, und die Populationsgr�o�ebeispielsweise st�undli h bestimmen. Das gemessene Populationswa hstum ist dann

6.2. MATHEMATIK UND BIOLOGIE: POPULATIONSMODELLE 79ni ht mehr dur h die Glei hung xt+1 = 2xt gegeben, sondern dur h eine Glei hungder Form x�+1 = ax� , wobei die \+1" nun einem elementaren Messintervall (im obi-gen Beispiel: eine Stunde) entspri ht und die Gr�o�e a von 2 abwei ht | es sei denn,Generationszeit und Messintervall stimmen zuf�allig exakt �uberein. Ein Beispiel: Ei-ne Bakterienpopulation verdopple si h alle 20 Minuten. Dieses Wa hstum k�onnenwir dur h die Iterierte Abbildung xt+1 = 2xt bes hreiben, wobei ein Zeits hritt derGenerationszeit 20 Minuten entspri ht. Wollen wir jedo h die Zeit in Stunden mes-sen, so m�ussen wir wie folgt vorgehen: Eine Stunde enth�alt drei Generationszeiten.Pro Generationszeit verdoppelt si h die Population, in einer Stunde vera htfa ht(8 = 23) sie si h also. Damit erhalten wir die Iterierte Abbildung x�+1 = 8x� ,wobei die \+1" nun einer Stunde entspri ht.SELBSTTEST: In einem Experiment werde die Gr�o�e einer Bakterienpopulationst�undli h gemessen. Aus der Analyse der Messwerte erh�alt man f�ur a den Wert 1:2.Bere hnen Sie die Zeit, in der si h die Population verdoppelt.6.2.2 Holzs hlag im Wald IAnnahmen: Das Volumen x an verwertbarem Holz in einem Waldst�u k wa hsepro Jahr um 2000m3. Glei hzeitig verliere der Wald j�ahrli h 40% des Holzbestandesdur h forstwirts haftli hen Eins hlag.Modell: Die Annahmen f�uhren zu folgender Iterierten Abbildung:xt+1 = (1� 0:4)xt + 2000m3 = 0:6xt + 2000m3 (6.14)Dies ist eine inhomogene lineare Iterierte Abbildung 1.Ordnung, entspri ht also derGlei hung (6.8) mit a = 0:6 und b = 2000m3. Siehe au h Abbildung 6.2.0
2000
4000
6000
8000
10000
0 2000 4000 6000 8000 10000
f(x t
) / m
3
xt / m3
0
2000
4000
6000
8000
10000
0 2 4 6 8 10
x t /
m3
tAbbildung 6.2: Holzs hlag I. Links die der Iterierten Abbildung zu Grunde liegende Funk-tion f(x) = 0:6x+ 2000m3, re hts zwei L�osungen dieses Modells, wobei als Anfangswertex0 = 1000 und x0 = 9000 gew�ahlt wurden. Unabh�angig vom Anfangswert errei ht das Vo-lumen des Waldst�u kes eine Gr�o�e von 5000m3, das hei�t den Fixpunkt x? der Funktionf(x). Das Modellsystem ist also asymptotis h stabil. Zur Interpretation der Darstellungsiehe au h Abbildung 6.1.Allgemeine L�osung und Anfangswertproblem:Wie in Abs hnitt 6.1.2 k�onnenwir f�ur ein vorgegebenes x0 die L�osung explizit bere hnen. Mit Glei hung (6.9)erhalten wirxt = 0:6tx0 + 0:6t � 10:6� 1 � 2000m3 = 5000m3 + 0:6t(x0 � 5000m3) :

80 KAPITEL 6. ITERIERTE ABBILDUNGENLangzeitverhalten: In diesem Beispiel gilt �1 < a = 0:6 < 1, was dem 2.Fall inAbs hnitt 6.1.1 entspri ht. Daraus folgt, dass xt f�ur lange Zeiten gegen den Wertb1�a = 5000m3 l�auft, und zwar unabh�angig davon, wie x0 gew�ahlt waren. DasVolumen des Waldst�u kes wird si h also auf eine Gr�o�e von 5000m3 einregulieren.6.2.3 Holzs hlag im Wald IIAnnahmen: In einem zweiten Waldst�u k wa hse die Holzmenge j�ahrli h um 40%;glei hzeitig werden hier pro Jahr 2000m3 Holz ges hlagen.Modell: Die Annahmen f�uhren nun zu folgender Dynamik:xt+1 = (1 + 0:4)xt � 2000m3 = 1:4xt � 2000m3 (6.15)Dies ist wieder eine inhomogene lineare Iterierte Abbildung 1.Ordnung wie (6.8),nun aber mit a = 1:4 und b = �2000m3. Siehe au h Abbildung 6.3.0
2000
4000
6000
8000
10000
0 2000 4000 6000 8000 10000
f(x t
) / m
3
xt / m3
0
2000
4000
6000
8000
10000
0 2 4 6 8 10
x t /
m3
tAbbildung 6.3: Holzs hlag II. Links die der Iterierten Abbildung zu Grunde liegendeFunktion f(x) = 1:4x� 2000m3, re hts zwei L�osungen dieses Modells, wobei als Anfangs-werte wiederum x0 = 4500 und x0 = 5500 gew�ahlt wurden. Abgesehen von der (instabilen)Fixpunkt-L�osung zum Fixpunkt x? = 5000m3 divergieren in diesem Modell alle L�osun-gen. F�ur Anfangswerte x0 < x? ergeben si h zudem negative Werte f�ur den Holzbestand.Um biologis h sinnvoll zu sein, m�u�te dieses Modell dur h ni htlineare Terme so erg�anztwerden, dass beide Ph�anomene ni ht mehr auftreten.Allgemeine L�osung und Anfangswertproblem: Mit Glei hung (6.9) erhaltenwir jetzt xt = 1:4tx0 � 1:4t � 11:4� 1 2000m3 = 5000m3 + 1:4t(x0 � 5000m3) :Langzeitverhalten Im zweiten Waldst�u k ist a = 1:4 > 1 (1.Fall in Abs hnitt6.1.1). Das langfristige Verhalten h�angt nun explizit vom Anfangswert ab.F�ur x0 > 5000m3 divergiert die L�osung gegen plus Unendli h. Der Wald w�a hst�uber alle Grenzen. In der Realit�at kann dies ni ht ges hehen. Das Modell m�usstedeshalb um einen wa hstumslimitierenden Term erweitert werden.Stimmt x0 genau mit dem Fixpunkt b1�a = 5000m3 (6.10) �uberein, so bleibt xt f�uralle Zeiten konstant. Der Wald beh�alt seine Gr�o�e. Allerdings ist diese Fixpunkt-L�osung instabil und damit in (biologis her) Realit�at nie genau errei hbar.Bei x0 < 5000m3 divergiert die L�osung gegen minus Unendli h. Dies zeigt einezweite S hw�a he des Modells: Das Holzvolumen kann nie negativ werden, im Modell

6.2. MATHEMATIK UND BIOLOGIE: POPULATIONSMODELLE 81ges hieht dies aber zum Zeitpunkt t + 1 wenn zur Zeit t gilt: xt < 20001:4 m3. DiesesProblem kann jedo h lei ht gel�ost werden, indem man festsetzt, dass xt+1 = 0falls xt < 20001:4 m3. Damit entsteht ein zweiter Fixpunkt x?? = 0, die zugeh�origeFixpunkt-L�osung (0; 0; 0; : : :) ist asymptotis h stabil. Diese L�osung entspri ht einemvollst�andig abgeholzten Wald.SELBSTTEST: Diskutieren Sie die Gemeinsamkeiten und Unters hiede der beidenSzenarien! �Uberlegen Sie si h weitere biologis h motivierte Beispiele und versu henSie, die daraus folgenden Iterierten Abbildungen zu analysieren.6.2.4 No hmals: Das Populationsmodell von Fibona iIn Kapitel 4.1 wurde das Populationsmodell von Fibona i (1170-1250) s hon kurzvorgestellt. Hier wollen wir es nun im Detail diskutieren. Das Modell geht davon aus,dass neugeborene Kanin henpaare na h dem ersten und dem zweiten Monat jeweilsein neues Kanin henpaar zur Welt bringen und dann die weitere Fortp anzung ein-stellen. Wir wollen diese Dynamik mathematis h bes hreiben und bezei hnen dazuam zwe km�a�igsten die Anzahl der im Monat t neugeborenen Kanin henpaare mitxt. Diese Anzahl entspri ht ni ht der gesamten Zahl an Paaren, die beispielsweiseau h davon abh�angt, wie alt die Kanin hen werden.Ist im nullten Monat ein neugeborenes Kanin henpaar in einem bislang von Kanin- hen freien Gebiet ausgesetzt worden (x�1 = 0 und x0 = 1), so wird es im erstenMonat ein weiteres Paar zur Welt bringen womit x1 = 1. Im zweiten Monat wirdsowohl das erste als au h das zweite Paar jeweils ein neues Kanin henpaar zur Weltbringen, und wir erhalten x2 = 2. Im dritten Monat werden si h die im ersten undzweiten Monat neugeborenen Paare fortp anzen, was x3 = 3 ergibt. Verfolgt mandiese Entwi klung, so sieht man, dass allgemein gilt:xt+1 = xt + xt�1 : (6.16)Die Folge der neugeborenen Kanin henpaare ergibt si h damit zu(1; 2; 3; 5; 8; 13; 21; 34; 55; : : :) f�ur x�1 = 0 und x0 = 1 : (6.17)Wie die L�osungen des Modells von Malthus (Kapitel 6.2.1) divergiert die Zahlenfolge(6.17). F�ur gro�e Zeiten re ektiert damit au h das Modell von Fibona i ni htdie Wa hstumsgrenzen biologis her Populationen. Im n�a hsten Kapitel werden wirAns�atze kennen lernen, diese Problematik zu �uberwinden.Aus der Si ht dynamis her Modelle ist der Ansatz von Fibona i eine lineare Ab-bildung zweiter Ordnung, da der Wert xt+1 gem�a� (6.16) von den Werten zu zweifr�uheren Zeitpunkten abh�angt, n�amli h von xt und xt�1.An dieser Stelle m�ogen Sie einwenden, dass xt+1 au h s hon in den bisher betra h-teten Iterierten Abbildungen sowohl von xt als au h von xt�1 abhing, da xt dur hxt�1 bestimmt wird. Diese Abh�angigkeit ist jedo h von einer anderen Natur: BeiIterierten Abbildungen 1.Ordnung ist die Anfangsbedingung dur h x0, das hei�tdur h Angabe einer Zahl festgelegt. Ni ht so bei der Dynamik von Fibona i: Hierist x1 ni ht allein dur h x0 bestimmt. Neben x0 muss au h x�1 festgelegt werden,bevor man die Iterierte Abbildung (6.16) anwenden kann. Startet man beispielsweisemit der Anfangsbedingung x�1 = 1, x0 = 3, erh�alt man die Folge(4; 7; 11; 18; 29; 47; 76; 123 : : :) f�ur x�1 = 1 und x0 = 3 : (6.18)

82 KAPITEL 6. ITERIERTE ABBILDUNGENDas Modell von Fibona i weist eine Reihe interessanter Eigens haften auf. Unteranderem n�ahert si h der Quotient aufeinander folgender Geburtenjahrg�ange, at =xt�1xt , f�ur gro�e t an denWert p5�12 des goldenen S hnittes an. Dividiert man n�amli hbeide Seiten von (6.16) dur h xt, so erh�alt manxt+1xt = 1 + xt�1xt :Setzt man in diese Glei hung die De�nition at = xt�1=xt ein, so f�uhrt dies auf1at+1 = 1 + at (6.19)oder at+1 = 11 + at : (6.20)Der Grenzwert dieser Folge ist na h Glei hung (5.9) dur h � = �1�p52 gegeben. Dadie Zahl der Neugeborenen immer positiv ist, ist der Grenzwert dur h die positiveL�osung gegeben, und wir erhalten wie behauptet den goldenen S hnitt.BEMERKUNG: Die Iterierte Abbildung (6.20) ist im Gegensatz zum Modell vonFibona i nur von 1.Ordnung. Diese Vereinfa hung ergibt si h daraus, dass (6.20)nur Aussagen �uber das Verh�altnis xtxt�1 ma ht. Diese Glei hung stellt somit einereduzierte Bes hreibung des urspr�ungli hen Modells dar, aus der die Zahl der injedem Jahr geborenen Kanin hen ni ht mehr abgeleitet werden kann.6.3 Aufgaben1. (Lineare Iterierte Abbildung) Untersu hen Sie das folgende Populationsmodell,das explizit auf Geburts- und Sterbeprozesse eingeht: Die mittlere Geburtenratepro Kopf und Generationszeit sei �, die Sterberate �. Daraus ergibt si h folgendeDynamik der Bev�olkerungsgr�o�e xt:xt+1 = xt + �xt � �xt : (6.21)(a) Wof�ur stehen die einzelnen Terme auf der re hten Seite von (6.21)? Wel heWerte d�urfen die Parameter � und � annehmen, damit das Modell biologis hsinnvoll ist?(b) Geben Sie Bedingungen an die Parameter � und � an, unter denen die Bev�olke-rungsgr�o�e xt (i) w�a hst, (ii) konstant bleibt und (iii) ausstirbt. Was bedeutetWa hsen und Aussterben im Kontext der Monotonie von Folgen?( ) Wie entwi kelt si h die Bev�olkerung f�ur beliebige Zeiten t, wenn sie zur ZeitNull dur h x0 gegeben ist? Wel he L�osung hat also die Iterierte Abbildung(6.21)?2. (Beispiel aus der Medizin) Ein Patient erh�alt t�agli h ein Medikament mit einerfesten Dosis von d mg (Milligram) und s heidet pro Tag p Prozent der im K�orperangesammelten Medikamentenmenge wieder aus.(a) Ma hen Sie si h klar, warum f�ur die Medikamentenmenge xn+1 im K�orper desPatienten am n+ 1-ten Tag giltxn+1 = qxn + d (6.22)wobei xn die Medikamentenmenge am n-ten Tag und q = 1� p=100 ist.

6.3. AUFGABEN 83(b) Warum mu� in diesem Beispiel der Parameter q zwis hen Null und Eins liegenund der Parameter d positiv sein, um der biologis hen Realit�at zu entspre hen?( ) Unter wel hen Bedingungen an d und q ist die Folge xn monoton wa hsendoder fallend? Ist sie streng monoton?(d) Wel he Funktion f hat die entspre hende Iterierte Abbildung xn+1 = f(xn)?(e) Skizzieren Sie den Graph von f ! Zei hnen Sie zus�atzli h die Winkelhalbierendeein!(f) Besitzt diese Iterierte Abbildung Fixpunkte? Wenn ja: Wie h�angt ihre Gr�o�evon d und q ab? Was bedeutet das Errei hen eines Fixpunktes f�ur die Medika-mentenmenge?(g) Wel he Zeitentwi klung erwarten Sie f�ur lange Zeiten? Diskutieren Sie dieseFrage qualitativ mit Hilfe der Ergebnisse aus (f) und (g). Was bedeutet diesf�ur den langfristige Medikamentenlevel im K�orper?3. (Beispiel aus der Fis hereibiologie I) In einem gro�en Fis htei h lebt seit l�angererZeit eine stabile Population von etwa 9000 Pl�otzen (Rutilus rutilus). Davon sind6.2% fortp anzungsf�ahig und es gibt genauso viele M�ann hen wie Weib hen. Jedesder ges hle htsreifen Weib hen legt im S hnitt 10 000 Eier pro Jahr ab. Davonerleben nur 0.2% das n�a hste Jahr. Von den Tieren, die das erste Jahr �uberlebthaben, gehen jedes Jahr 50% zugrunde6.Wir wollen aus diesen Angaben ein Modell f�ur die Populationsgr�o�e der Pl�otzenma hen. Da Pl�otzen nur einmal im Jahr lai hen, bietet es si h an, mit einer linearenIterierte Abbildung als einfa hstes Modell f�ur die Anzahl der Pl�otzen xn im Jahr nzu beginnen. Um dieses aus obigen Angaben zu entwi keln, beantworten Sie bittefolgende Fragen:(a) Wieviele der aus den 10 000 Eiern eines Weib hens ges hl�upften Jung�s heleben no h im darau�olgenden Jahr?(b) Wel her Bru hteil der Gesamtpopulation ist �uberhaupt in der Lage Eier zulegen?( ) Wie gro� ist dann die Geburtenrate � (Anzahl der Na hkommen pro Tier undJahr)? Ber�u ksi htigen Sie das Ergebnis aus (a)! (Das Ergebnis ist � = 0:62).(d) Wie gro� ist die Sterberate � (Anzahl der toten Tiere pro Tier und Jahr)?(e) Geben Sie nun die Formel einer homogenen linearen Iterierten Abbildung f�ur dieAnzahl der Pl�otzen xn+1 = f(xn) = rxn im n�a hsten Jahr n+1 in Abh�angigkeitder Populationsgr�o�e xn im Jahr n an! Wie gro� ist also der Parameter r?(f) Skizzieren sie den Graph der Funktion f(x)!(g) Geben Sie die explizite L�osung (xn)n2N der linearen Iterierten Abbildungxn+1 = f(xn) f�ur beliebige Anfangspopulationen x0 > 0 an und skizzierenSie den typis hen L�osungsverlauf!(h) Wie wird si h die Population na h dieser Formel im Laufe der Zeit entwi keln?Warum ma ht das biologis h keinen Sinn?4. (Beispiel aus der Fis hereibiologie II) In einem �ahnli hen Tei h wie in der vorhe-rigen Aufgabe wird wesentli h intensiver geangelt. Dadur h gehen jedes Jahr zus�atz-li h 20% der Pl�otzenpopulation verloren.680% davon werden von Fre�feinden erbeutet, 18% verhungern, 1.999% werden geangelt undnur 0.001% sterben eines nat�urli hen Todes

84 KAPITEL 6. ITERIERTE ABBILDUNGEN(a) Wie gro� ist in diesem Tei h die Sterberate �?(b) Wie wird si h unter diesen Bedingungen und unter Verwendung des linea-ren Modells aus der vorherigen Aufgabe die Pl�otzenpopulation langfristig ent-wi keln? Skizzieren sie wiederum den Graphen der Abbildung f(x) und diePopulationsg�o�e xn f�ur x0 = 9000 und n = 1; 2; : : : 5.( ) Um den Fis hbestand zu si hern, werden jedes Jahr d Pl�otzen aus einer Zu htin den Tei h eingesetzt. Wie lautet nun die entspre hende lineare Iterierte Ab-bildung? Fertigen Sie eine Skizze des Graphen der entspre henden Funktionf(x) an und zei hnen Sie zus�atzli h die Winkelhalbierende ein!(d) Wo liegt der Fixpunkt der Abbildung aus Teilaufgabe ( )?(e) Wieviele Fis he m�u�ten jedes Jahr dur h Neubesatz dem Tei h hinzugef�ugtwerden (wie gro� mu� also d sein), um die Population stabil auf 9000 Tiere zuhalten?(f) Wie lautet die allgemeine L�osung der Iterierten Abbildung aus Teilaufgabe ( )und (e)? Wie entwi kelt si h die Population, wenn na h einem besonders hartenWinter nur x0 = 1000 Tiere �uberlebt haben? Skizzieren Sie diese L�osung!5. (Lineare Iterierte Abbildung) Wir betra hten eine inhomogene lineare IterierteAbbildung vom Typ xt+1 = axt + b ; x0 2 R+ (6.23)(siehe z.B. die Medikamentenaufgabe 2, die Pl�otzenaufgabe 3 oder die Holzaufgabenim Skript).(a) Wie lautet die entspre hende homogene Iterierte Abbildung?(b) Wel he allgemeine L�osung hat die homogene Iterierte Abbildung?( ) Bere hnen Sie die Fixpunkte der inhomogenen Iterierten Abbildung (6.23)!(d) Geben Sie eine spezielle L�osung der inhomogenen Iterierten Abbildung (6.23)an!(e) Wie lautet die allgemeine L�osung der inhomogenen Iterierten Abbildung?(f) Bere hnen Sie die L�osung der inhomogenen Iterierten Abbildung f�ur den An-fangswert x0.

Kapitel 7Ni htlineare IterierteAbbildungenDie bisherigen linearen Modelle haben den Vorteil, dass ihre L�osungen systema-tis h bestimmt werden k�onnen. Die Modellierung von Wa hstumsprozessen f�uhrtdann jedo h zu L�osungen, die ras h �uber alle Grenzen wa hsen, was biologis h ge-sehen ni ht haltbar ist. In linearen Modellen fehlen n�amli h wa hstumslimitierendeFaktoren, wie sie bei begrenzten Resour en immer auftreten m�ussen | vom Rea-genzglas bis zum �Okosystem Erde. Um dieses De�zit zu �uberwinden, betra htenwir nun ni htlineare Modelle und studieren den Ein uss von Faktoren, die von derPopulationsgr�o�e abh�angen.Die dann einfa hste Iterierte Abbildung ist die sogenannte Logistis he Glei hungxt+1 = f(xt) = axt �1� xtC � mit a > 0 und C > 0 : (7.1)F�ur sehr kleine Werte von xt (xt � C) ist der Term xt=C viel kleiner als Einsund kann deshalb verna hl�assigt werden. Wenn man aber den zweiten Term auf derre hten Seite von (7.1) strei ht, erh�alt man die lineare Glei hung xt+1 = axt unddamit ein exponentielles L�osungsverhalten, wie in Kapitel 6 ausf�uhrli h bes hrieben.F�ur a > 1 wird x damit immer mehr anwa hsen, so dass in diesem Fall die Bedingungx� C f�ur l�angere Zeiten ni ht erf�ullt sein kann.Bevor wir analysieren, wie si h die L�osungen f�ur lange Zeiten entwi keln, wollen wiruntersu hen, unter wel hen Anforderungen an die Parameter C und a die L�osun-gen von (7.1) �uberhaupt biologis h sinnvoll sind. Da x die Gr�o�e einer Populationmodellieren soll, muss xt � 0 gelten { sowohl f�ur die Anfangsbedingung x0 zur Zeitt = 0 als au h f�ur alle weiteren Zeits hritte. Ist dies f�ur alle a > 0 und C > 0gew�ahrleistet?Ein Bli k auf (7.1) zeigt, dass xt+1 negativ ist, wenn im vorangegangenen Zeits hrittxt > C gilt. Eine negative Populationsgr�o�e ist jedo h biologis h ni ht sinnvoll.Wir m�ussen also versu hen, diese Situation auszus hlie�en. Anders ausgedr�u kt:Wir m�ussen errei hen, dass f�ur beliebige Populationsgr�o�en xt im Intervall [0; C℄au h der Wert xt+1 im Interval [0; C℄ liegt. Dies wird dann der Fall sein, wenn dasMaximum von f den Wert C ni ht �ubers hreitet.Die Funktion f ist eine na h unten ge�o�nete Parabel, die die Abszisse in den Punk-ten (0; 0) und (C; 0) s hneidet und deren S heitel im Punkt (C=2; aC=4) liegt. Falls85

86 KAPITEL 7. NICHTLINEARE ITERIERTE ABBILDUNGENwir also den Wert des Parameters a zwis hen 0 und 4 w�ahlen, wird die Gr�o�e derPopulation das Intervall [0; C℄ nie verlassen. Von nun an verwenden wir deshalbimmer Parameterwerte f�ur a im Intervall 0 < a � 4.Wel he Rolle spielt der Parameter C?Dividieren wir beide Seiten von Glei hung (7.1) dur h C so erhalten wirxt+1C = axtC �1� xtC � : (7.2)De�nieren wir nun yt = xt=C, so erf�ullt yt die Glei hung yt+1 = ayt(1 � yt).Messen wir also die Gr�o�e der Population ni ht �uber xt als \Zahl der Individuen"oder \Gesamtmasse der Population", sondern �uber yt = xt=C als \Bru hteil dermaximal zul�assigen Populationsgr�o�e C", so erhalten wir eine Glei hung, in derC ni ht mehr auftau ht. Die Gr�o�e C ers heint also in Glei hung (7.1) als reinerSkalierungsfaktor, ohne die L�osungsvielfalt in irgendeiner Weise zu beein ussen.1Wir k�onnen deshalb von nun an ohne jede Eins hr�ankung der Allgemeinheit C = 1setzen. Dagegen beein usst der Wert von a das L�osungsverhalten ganz erhebli h,wie wir in K�urze sehen werden.Mit diesen Vor�uberlegungen erhalten wir f�ur C = 1 die Standardform der Logisti-s hen Glei hung, xt+1 = axt(1� xt) mit 0 � a � 4 : (7.3)Das L�osungsverhalten f�ur kleine x haben wir s hon diskutiert. Was aber ges hieht,wenn die N�aherung x� 1 ni ht mehr zutri�t?Um diese Frage zu beantworten, wollen wir zuerst kl�aren, ob (7.1) Fixpunkt-L�osun-gen aufweist und su hen deshalb na h L�osungen der Glei hung x = ax(1 � x).Diese quadratis he Glei hung hat zwei L�osungen. Die erste ist der triviale Fixpunktx? = 0, der einer ausgestorbenen Population entspri ht. Der zweite Fixpunkt istx?? = 1� 1a : (7.4)1Um Mi�verst�andnisse zu vermeiden: Bei vorgegebenem Anfangswert x0 h�angt die L�osung (xt)dur haus von C ab. Betra hten wir jedo h alle m�ogli hen L�osungen, so �andern sie si h bis auf eineUmskalierung ni ht, wenn man C dur h einen anderen Wert ~C ersetzt.Diese erstaunli he Eigens haft verdeutli ht au h folgende �Uberlegung: Wir verglei hen zweidur h Glei hungen der Form (7.1) bes hriebene Modellpopulationen, wobei der Wert des Para-meters C in beiden F�allen unters hiedli h sei, was wir dadur h vermerken wollen, dass wir denParameter im zweiten Modell mit ~C bezei hnen. Bei vorgegebener Anfangsbedingung x0 wird si hdann die erste Population gem�a� Glei hung (7.1) entwi keln und zu einer gewissen L�osung (xt)f�uhren. Existiert im dur h ~C bes hriebenen zweiten Modell eine zur L�osung (xt) des ersten Mo-dells �ahnli he L�osung? Die Antwort ist �uberras hend: W�ahlen wir n�amli h f�ur das zweite Modellals Anfangsbedingung ~x0 den Wert ~x0 = x0 � ~C=C, so gilt na h (7.2) au h f�ur alle weiteren Zeiten~xt = xt � ~C=C. Die L�osungen beider Systeme sind also exakt proportional zueinander!Mit den vorangegangenen �Uberlegungen wird deutli h, dass dynamis he Systeme oft in ihrerGestalt vereinfa ht werden k�onnen, ohne dass si h dabei das L�osungsverhalten �andert. Dies kannmeist dadur h errei ht werden, dass man eine dimensionsbehaftete dynamis he Variable dur h einegeeignete Kombination von Parametern der Bewegungsglei hung so dividiert, dass eine dimensi-onslose Variable entsteht. (Genau diese �Uberlegung liegt au h der De�nition der dimensionslosenVariable y zugrunde.) Dabei ist es man hmal sogar m�ogli h, allein aus der Form der Bewegungs-glei hung auf die allgemeine Struktur der L�osungen zu s hlie�en. So k�onnen beispielsweise diedrei Keplers hen Gesetze der Planetenbewegung ohne explizite L�osung der Bewegungsglei hungenallein s hon aus der Beoba htung abgeleitet werden, dass die Gravitationskraft eine Zentralkraftist, deren St�arke umgekehrt proportional zum Abstandsquadrat abnimmt. Damit sind dann so-gar quantitative Aussagen wie im Dritten Keplers hen Gesetz m�ogli h: \Die Kuben der gro�enHalba hsen von Planetenbahnen verhalten si h wie die Quadrate ihrer Umlaufszeiten."

870
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
f(x t
)
xt
a=2.8
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30 35 40
x t
t
a=2.8
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
f(x t
)
xt
a=3.3
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30 35 40
x t
t
a=3.3
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
f(x t
)
xt
a=3.53
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30 35 40
x t
t
a=3.53
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
f(x t
)
xt
a=4
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30 35 40
x t
t
a=4Abbildung 7.1: L�osungen der Logistis hen Glei hung xt+1 = axt(1�xt) f�ur vers hiedeneWerte des Parameters a. Links ist jeweils der Graph der zu Grunde liegenden Funktionf(x) = ax(1� x) dargestellt, zusammen mit der Winkelhalbierenden y = x. Die S hnitt-punkte des Graphen von f und der Winkelhalbierenden entspre hen den Fixpunkten derFunktion. Siehe au h Glei hung (6.4). Re hts sind die entspre henden L�osungen der Lo-gistis hen Glei hung abgebildet. An der Stelle a = 3 wird die Fixpunkt-L�osung instabil.F�ur a > 3 treten periodis he L�osungen auf. Die Periode dieser L�osungen w�a hst ras h mita bis das System s hlie�li h bei a � 3:57 einen haotis hen Zustand errei ht.

88 KAPITEL 7. NICHTLINEARE ITERIERTE ABBILDUNGENF�ur a > 1 gilt x?? > 0.2 Die entspre hende Fixpunkt-L�osung der Logistis henGlei hung (7.3) repr�asentiert eine konstante Population. Die Gr�o�e dieser Glei h-gewi htspopulation h�angt dabei vom gew�ahlten Wert a ab: Je gr�o�er a ist, umsogr�o�er ist na h (7.4) au h x??, wobei 0 � x?? � 3=4 gilt.F�ur die Stabilit�at der Fixpunkt-L�osung (0; 0; 0; : : :) gilt wie im linearen Fall (sieheKapitel 6.1.1): f�ur 0 � a < 1 ist x? = 0 asymptotis h stabil, f�ur a > 1 ist x? = 0instabil. Untersu ht man die Stabilit�at der Fixpunkt-L�osung (x??; x??; x??; : : :), sostellt man fest, dass diese L�osung nur f�ur 1 < a < 3 asymptotis h stabil ist, f�ura > 3 ist sie dagegen instabil. Dieses Ergebnis erh�alt man aus der Betra htungder Steigung der Funktion f(x) = ax(1 � x) am Fixpunkt x??. Ist der Betrag derSteigung kleiner als eins, so werden kleine St�orungen der Fixpunkt-L�osung der Ite-rierten Abbildung wegged�ampft | die Fixpunkt-L�osung ist damit na h De�nition(siehe Kapitel 6) asymptotis h stabil. Ist der Betrag der Steigung gr�o�er als eins, sowa hsen die St�orungen | die Fixpunkt-L�osung ist instabil. Da die Logistis he Glei- hung ausf�uhrli h in der Vorlesung Theoretis he Biologie A behandelt wird, wollenwir hier ni ht ins Detail des Beweises gehen.Wel he L�osungen zeigt die Logistis he Glei hung f�ur 3 < a � 4? In diesem Be-rei h des Parameters a sind einerseits beide Fixpunkte instabil, umgekehrt kannxt na h unserer allgemeinen Betra htung au h f�ur beliebig gro�e Zeiten das Inter-val [0; 1℄ ni ht verlassen. Zusammengenommen bedeuten beide Resultate, dass ne-ben den beiden nun instabilen Fixpunkt-L�osungen au h L�osungen mit interessanterZeitabh�angigkeit existieren m�ussen. Die einfa hsten derartigen L�osungen sind pe-riodis he L�osungen, das hei�t Folgen (xn)n2N, bei denen xn+P = xn f�ur allen 2 N gilt, wobei P 2 N die Periode der Oszillation bezei hnet.Mit Hilfe einer Computersimulation von (7.3) erkennt man ras h, dass die Logisti-s he Glei hung f�ur a > 3 periodis he L�osungen besitzt (siehe au h Abbildung 7.1).Erh�oht man a �uber den Wert a = 3, tritt dabei als erstes eine L�osung mit Periode2 auf. Hier springt xt zwis hen den zwei Werten x1 und x2 hin und her. Biologis hinterpretiert bedeutet dies, dass die Populationsgr�o�e zyklis h ansteigt und abf�allt.Liegt die Populationsgr�o�e zu einem bestimmten Zeitpunkt bei dem kleineren Wertx1, so �uberwiegen ans hliessend die Wa hstumsprozesse und die Population ver-gr�o�ert si h. Im n�a hsten Zeits hritt errei ht sie am Wert x2 jedo h eine Situation,in der die Resour en pro Individuum ges hrumpft sind, so dass die Population im�ubern�a hsten Zeits hritt wieder abnimmt. Und so weiter. St�orungen dieser periodi-s hen L�osung verkleinern si h im Lauf der Zeit, so dass f�ur lange Zeiten wieder dieurspr�ungli he Oszillation errei ht wird | die L�osung ist also asymptotis h stabil.Notiz: Eine asymptotis h stabile periodis he L�osung wird au h Grenzzyklusgenannt.Vergr�o�ert man den Wert von a lei ht, so �andert si h zwar die Lage der beiden Wertex1 und x2, die Stabilit�at der L�osung bleibt jedo h erhalten. W�ahlt man f�ur a dagegeneinen Wert a > 1 + p6 � 3:449, so wird die L�osung instabil. Daf�ur existiert nuneine asymptotis h stabile periodis he L�osung mit Periode 4. Bei weiterer Erh�ohungdes Parameters wird diese L�osung wiederum instabil und eine neue L�osung mitPeriode 8 ers heint. Und so weiter. Dieses Ph�anomen wird Periodenverdopplunggenannt.2F�ur a < 1 gilt x?? < 0. Der Fixpunkt ist nun negativ. Er wird jedo h unter den biologis hsinnvollen Bedingungen (0 < a � 4 und 0 � x0 � 1) ni ht errei ht, da xt wie oben gezeigt nienegativ werden kann.

89
0
0.2
0.4
0.6
0.8
1
2.6 2.8 3 3.2 3.4 3.6 3.8 4
x t
rAbbildung 7.2: Periodenverdopplung. F�ur jeden Wert des Parameters a der Logistis henGlei hung xt+1 = axt(1�xt) sind die Werte der asymptotis h stabilen L�osung aufgetragen.F�ur a < 3 hat die Logistis he Glei hung nur einen Fixpunkt. Deshalb zeigt die Abbildungin diesem Berei h nur einen Wert. An der Stelle a = 3 tritt die erste periodis he L�osungauf. Sie hat Periode 2 wie aus den zwei �ubereinanderliegenden Werten ersi htli h ist. Ander Stelle a = 1 +p6 � 3:449 wird diese L�osung instabil und es entsteht eine L�osung mitPeriode 4. Dies ist in der Abbildung daran ersi htli h, dass nun vier �ubereinanderliegendeWerte existieren. Vergr�o�ert man a, so zeigt das System weitere Periodenverdopplungen,wobei der Abstand bis zur jeweils n�a hsten Verdopplung ras h abnimmt. An der Stelle a �3:57 wird erstmals ein haotis her Zustand errei ht. F�ur no h h�ohere Werte von a tretenL�osungen mit ungerader Periode auf, die wiederum �uber Periodenverdopplungskaskadenins Chaos f�uhren.Ab einem gewissen Wert von a treten haotis he L�osungen auf. Beliebig kleineVariationen im Anfangswert x0 f�uhren hier zu ras h auseinanderlaufenden L�osun-gen. Angewendet auf physikalis he oder biologis he Fragen bedeutet dies, dass mandas Verhalten eines haotis hes Systems bei gegebenem Anfangswert nur �uber einenrelativ kurzen Zeitraum vorhersagen kann, da die Bestimmung des Anfangswertesx0 immer mit einem ni htvers hwindenden Messfehler verbunden ist.Ni htlinearit�aten k�onnen also selbst in ansonsten extrem einfa hen mathematis henModellen zu h�o hst unerwartetem und �uberaus rei hhaltigem Verhalten f�uhren |\simple models with omplex dynami s" (R. May, 1975). Da biologis he Syste-me Ni htlinearit�aten beinhalten m�ussen, um ihre gew�uns hte Funktion �uberhauptausf�uhren zu k�onnen, spielt das Studium komplexer dynamis her Vorg�ange, oft au hunter dem Namen \Ni htlineare Dynamik" zusammengefasst, eine zunehmend wi h-tige Rolle in der Biologie.Im Rahmen dieser einf�uhrenden Vorlesung bleibt (leider!) ni ht die Zeit, im De-tail auf einige interessante Ph�anomene einzugehen. In der Vorlesung Theoretis heBiologie A werden sie jedo h an mehreren Beispielen ausf�uhrli h diskutiert.

90 KAPITEL 7. NICHTLINEARE ITERIERTE ABBILDUNGEN7.1 Aufgaben1. (Beispiel aus der Fis hereibiologie III) In der Aufgabe 3 des vorherigen Kapitelshaben Sie gesehen, dass die lineare Iterierte Abbildung als Modell f�ur die Populati-onsgr�o�e der Pl�otzen ni ht die tats�a hli he Situation einer stabilen Populationsgr�o�ebes hreibt. Ein Modell, da� die Probleme bei zu gro�en Individuenzahlen ber�u k-si htigt, ist die Logistis he Abbildung xn+1 = rxn(1 � xn=C). Zus�atzli h zu demlinearen Modell xn+1 = rxn kommt hier also no h der Faktor 1� xn=C mit einemweiteren Parameter C hinzu. Der Parameter r wurde bereits im vorigen Kapitel inder Aufgabe 2 bere hnet und ist glei h 1.12 .(a) Bere hnen sie f�ur beliebige r 2 (0; 4℄ und C > 0 die Fixpunkte der logistis henAbbildung!(b) Wie gro� muss der Parameter C sein, damit die Logistis he Abbildung f�urden speziellen Wert von r = 1:12 eine stabile Population vom 9000 Tierenreproduziert?( ) Es sei nun r = 3:2, C = 1 und x0 = 0:8. Bere hnen Sie die ersten se hs Werteder Logistis hen Abbildung und tragen sie diese in ein A hsenkreuz ein. Wasf�allt ihnen auf?

Kapitel 8Grenzwerte von Funktionenund StetigkeitIn Kapitel 5 wurde der Begri� Grenzwert eingef�uhrt, um Fragen zum asymptoti-s hen Verhalten von Folgen und Reihen analysieren zu k�onnen.Beim Studium reeller Funktionen y = f(x) ist man oft am Verhalten von f(x)in der N�ahe eines (vorher ausgew�ahlten) Punktes x0 interessiert: Wie verh�alt si hbeispielsweise die Funktion f(x) = x2 in der N�ahe von x0 = 1?Auf den ersten Bli k haben diese beide Fragestellungen ni hts miteinander zu tun| im ersten Fall interessiert man si h f�ur das Verhalten einer Folge (an) f�ur n gegenUnendli h, im zweiten Fall f�ur das lokale Verhalten einer reellen Funktion. Mit einemkleinen Tri k gelingt es jedo h, die Kenntnisse �uber Grenzwerte von Folgen direktf�ur die lokale Untersu hung von reellen Funktionen zu verwenden. Dieses Vorgehenist typis h f�ur den systematis hen Aufbau mathematis her Konzepte und wird imfolgenden Kapitel im Detail vorgestellt.Ausbli k: Mit Hilfe des Grenzwertbegri�s f�ur reelle Funktionen werden wir in Ka-pitel 9 in der Lage sein, das Konzept \Di�erentialquotient" einzuf�uhren, und damiteinen der wi htigsten Begri�e der gesamten Mathematik und Naturwissens haftder Neuzeit. Ohne diesen Begri� k�onnten wir ni ht sinnvoll �uber die momentaneGes hwindigkeit oder Bes hleunigung eines K�orpers spre hen, ges hweige denn dieDynamik biologis her Systeme mit Di�erentialglei hungen bes hreiben...8.1 Grenzwerte reeller Funktionen8.1.1 De�nitionenVORBEMERKUNG: Bisher wurde das Symbol x0 zur Bezei hnung des Anfangs-wertes einer Iterierten Abbildung verwendet. In diesem und sp�ateren Kapiteln wer-den wir Funktionen an einer bestimmten Stelle ihres De�nitionsberei hs betra hten.Wir folgen dabei der �ubli hen Notation und bezei hnen diese ausgezei hnete Stelleebenfalls mit x0. Die beiden Bedeutungen des Symbols x0 d�urfen ni ht verwe hseltwerden. Aus dem Zusammenhang sollte jedo h die jeweilige Bedeutung eindeutighervorgehen. 91

92 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEITDe�nition (Grenzwert einer Funktion an der Stelle x0):Sie M � R. Die Funktion f : M ! R besitzt genau dann den Grenzwert zan der Stelle x0 wenn f�ur jede Folge (xn)n2N aus dem De�nitionsberei h Mvon f , f�ur die xn 6= x0 f�ur alle n erf�ullt ist, gilt:Aus limn!1xn = x0 folgt limn!1 f(xn) = z : (8.1)Existiert der Grenzwert, so s hreibt man au hlimx!x0 f(x) = z : (8.2)Dabei ist x0 2 R und �1 � z � +1.Ans hauli h bedeutet die De�nition des Grenzwertes, dass bei beliebiger Ann�ahe-rung von x an x0 die Di�erenz f(x) � z vers hwindend klein wird. Dabei wirdallerdings ni ht vorausgesetzt, dass f(x0) = z gilt.Der Prozess der Ann�aherung selbst wird hier als sukzessive Bewegung aufgefa�t, beider si h xn mit wa hsendem Index n immer n�aher zu x0 hinbewegt. Dies entspri htgenau dem Grenzwertkonzept bei Folgen.BEISPIEL: Die Funktion f(x) = x:Wir betra hten die Funktion f(x) = x. Jedes Glied xk jeder denkbarenFolge (xn)n2N erf�ullt auf triviale Weise xk = f(xk) | beide Gr�o�en sindja identis h. Na h De�nition existiert dann der Grenzwert von f f�ur allex0 2 R und es gilt: limx!x0 f(x) = limx!x0 x = x0Na h dem glei hen S hema k�onnten wir nun beliebige Funktionen Fall f�urFall mit Hilfe der obigen De�nition auf die Existenz von Grenzwerten hinuntersu hen. Diese Analyse kann jedo h viel einfa her mit Hilfe allgemeinerRe henregeln errei ht werden, die wir in Abs hnitt 8.1.2 au��uhren.WICHTIG: In die De�nition des Grenzwertes der Funktion f an der Stelle x0 gehtder Funktionswert f(x0) ni ht ein. Eine Funktion kann deshalb einen Grenzwertan der Stelle x0 haben, selbst wenn sie an dieser Stelle springt (Beispiel 1) oder x0gar ni ht im De�nitionsberei h der Funktion liegt (Beispiel 2). S hlie�li h muss eineFunktion an einer bestimmten Stelle ni ht unbedingt einen Grenzwert aufweisen(Beispiel 3).BEISPIEL 1: Eine Funktion, bei der Grenzwert und Funktionswert an derStelle x0 = 0 ni ht �ubereinstimmen.Die Funktion f sei dur h f(x) = 0 f�ur alle x 6= 0 und f(0) = 1 de�-niert. Dann gilt na h der De�nition des Grenzwertes limx!0 f(x) = 0. DerFunktionswert an dieser Stelle ist jedo h f(0) = 1. (Siehe au h Abbildung8.1).BEISPIEL 2:Grenzwert einer Funktion, die an der Stelle x0 ni ht de�niertist. F�ur die Funktion f : R+ ! R; x 7! x�1 gilt limx!0 f(x) =1, da f�ur jedeFolge (xn) mit xn 2 R+ und limn!1 xn ! 0 gilt: limn!1 f(xn) ! 1.Der Wert x = 0 selbst liegt jedo h ni ht im De�nitionsgebiet der Funktion.

8.1. GRENZWERTE REELLER FUNKTIONEN 931) y
x
1 2) 0
1
2
3
4
5
6
0 1 2 3 4 5 6x
y
3)y
x
-1
1
Abbildung 8.1: Darstellung der Funktionen der Beispiele 1 bis 3.BEISPIEL 3:Die Signumfunktion| eine Funktion, die an der Stelle x0 = 0keinen Grenzwert hat.Wir de�nieren die Funktion sign(x) auf ganz R dur h:sign(x) = 8<: +1 f�ur x > 00 f�ur x = 0�1 f�ur x < 0Diese Funktion ordnet jeder reellen Zahl x ihr Vorzei hen zu und wird des-halb Signumfunktion genannt.Die Signumfunktion hat keinen Grenzwert an der Stelle x0 = 0.Beweis:Sei xn = 1n und yn = � 1n . Dann gilt:limn!1 sign(xn) = limn!1 sign� 1n�= limn!1 1= 1limn!1 sign(yn) = limn!1 sign�� 1n�= limn!1(�1)= �1Die Folgen � 1n�n2N und �� 1n�n2N konvergieren beide gegen 0. Die Fol-gen der Funktionswerte �sign � 1n��n2N und �sign �� 1n��n2N konvergie-ren jedo h gegen unters hiedli he Werte, n�amli h 1 und �1. Damit sind dieVorrausetzungen der De�nition (8.1) ni ht erf�ullt. Die Funktion sign(x) hatdeshalb an der Stelle 0 keinen Grenzwert.Falls f�ur die Werte xn aller Folgen immer xn < x0 gilt, man si h also von linksan die Stelle x0 `herantastet', spri ht man vom linksseitigen Grenzwert unds hreibt limx!x�0 f(x). Falls immer x > x0 gilt, spri ht man vom re htsseitigenGrenzwert und s hreibt limx!x+0 f(x).Ein wi htiges Beispiel, bei dem links- und re htsseitiger Grenzwert ni ht �uberein-stimmen ist die Signumfunktion (siehe oben). Der linksseitige Grenzwert an derStelle x = 0 ist �1, der re htsseitige ist 1. Der Grenzwert der Funktion f an derStelle x0 = 0 existiert aber ni ht, wie s hon oben gezeigt.Allgemein gilt jedo h folgende Aussage:

94 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEITSatz:Wenn der Grenzwert einer Funktion f an der Stelle x0 existiert, dann existie-ren au h der links- und re htsseitige Grenzwert an dieser Stelle und alle dreiGrenzwerte sind identis h.Weiterhin gilt: Falls der links- und re htsseitige Grenzwert einer Funktion f ander Stelle x0 existiert und beide Grenzwerte �ubereinstimmen, so existiert au hder Grenzwert der Funktion an dieser Stelle.Der Beweis folgt direkt aus der De�nition der drei Grenzwertbegri�e.In Kapitel 3.3 ist darauf hingewiesen worden, dass Potenzfunktionen xn mit negati-ven Exponenten n in der N�ahe der Stelle x0 = 0 betragsm�a�ig beliebig gro� werden.Dieses Ph�anomen wird mit dem Begri� \Polstelle" bezei hnet. W�a hst eine belie-bige Funktion an einer Stelle x0 �uber alle Grenzen, so bezei hnet man dies als eineSingularit�at:De�nition (Singularit�at):Eine Funktion f hei�t singul�ar an der Stelle �1 < x0 <1, wennlimx!x0 jf(x)j = +1 : (8.3)8.1.2 Re henregelnDer Begri� des Grenzwertes einer Funktion wurde de�niert, indem man ihn auf denBegri� des Grenzwerts einer Folge zur�u kf�uhrte. Aus den Re henregeln (5.4)-(5.8)erhalten wir deshalb:Re henregeln f�ur Grenzwerte von Funktionen:Sei x0 2 R. Ferner sollen alle jeweils re hts der Glei hheitszei hen stehendenGrenzwerte existieren und endli h sein. Dann gilt:Konstanter Faktor : limx!x0 af(x) = a limx!x0 f(x) f�ur alle a 2 R (8.4)Summe : limx!x0[f(x)+g(x)℄ = limx!x0 f(x) + limx!x0 g(x) (8.5)Produkt : limx!x0[f(x) � g(x)℄ = limx!x0 f(x) � limx!x0 g(x) (8.6)Quotient : limx!x0 f(x)h(x) = limx!x0 f(x)limx!x0 h(x)falls limx!x0 h(x) 6= 0 (8.7)Betrag : limx!x0(jf(x)j) = j limx!x0(f(x))j (8.8)

8.1. GRENZWERTE REELLER FUNKTIONEN 95BEISPIEL 1: Anwendung | Multiplikation mit einem konstanten Faktor:Sei f(x) = 5x. Dann gilt f�ur alle x0 2 R:limx!x0 f(x) = limx!x0 5x= 5 limx!x0 x= 5x0BEISPIEL 2: Anwendung | Produktregel:Sei f(x) = x2: Dann gilt f�ur alle x0 2 R:limx!x0 f(x) = limx!x0 x2= limx!x0 x � limx!x0 x= x20Verallgemeinert man diese beiden Beispiele, so sieht man, dass f�ur alle Potenzfunk-tionen f(x) = xn (falls n � 0 allerdings nur f�ur x0 6= 0) und f�ur alle reellwertigenPolynome f(x) = Pn�=0 a�x� (� 2 N, a� 2 R) gilt: limx!x0 f(x) existiert mitlimx!x0 f(x) = f(x0). All diese Funktionen weisen also wohlde�nierte Grenzwerteauf.8.1.3 Grenzwert von f(x) f�ur x gegen 1 und �1Mit Hilfe des Grenzwertbegri�es f�ur Folgen kann man au h das Verhalten reellerFunktionen f�ur gro�e Argumente behandeln. Dazu legt man wie beim Grenzwert aneiner endli hen Stelle x0 fest:De�nition:Die Funktion f hat f�ur x gegen Unendli h den Grenzwert z, wenn f�ur jedereellwertige Folge (xn), f�ur die limn!1 xn =1 gilt, die Bedingunglimn!1 f(xn) = z (8.9)erf�ullt ist. Man s hreibt dann au hlimx!1 f(x) = z : (8.10)BEMERKUNG: In glei her Weise wird der Grenzwert von f(x) f�ur x gegen minusUnendli h de�niert.BEMERKUNG: Die Re henregeln (8.4) - (8.8) tre�en entspre hend au h f�urlimx!1 f(x) und limx!�1 f(x) zu.BEISPIEL:F�ur a 6= 0, b 6= 0 und 6= 0 gilt:limx!1 axbx+ = limx!1 ab+ � x�1 = ab+ � limx!1 x�1 = ab+ � 0 = ab(8.11)

96 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEIT8.2 StetigkeitAns hauli h versteht man unter einer stetigen Funktion f eine Funktion, derenGraph ohne Absetzen gezei hnet werden kann. Eine stetige Funktion ma ht alsokeine Spr�unge. Mathematis h de�niert man Stetigkeit mit Hilfe des Grenzwerteseiner Funktion:De�nition (Stetigkeit):Sei M � R. Man nennt eine Funktion f : M ! R stetig an der Stelle x0,wenn der Grenzwert an der Stelle x0 2M existiert und mit dem Funktionswertf(x0) �ubereinstimmt, das hei�t wennlimx!x0 f(x) = f(x0) : (8.12)Ansonsten hei�t f unstetig an der Stelle x0.Eine Funktion hei�t stetig auf M, wenn sie f�ur alle x0 aus dem De�nitionsgebietM stetig ist.Ist f auf ganz R stetig, so sagt man au h kurz: f ist stetig.Aus den Re henregeln f�ur Grenzwerte von Funktionen ergeben si h die folgendenRe henregeln f�ur stetige Funktionen:Seien f; g :M ! R in x0 stetige Funktionen. Dann gilt f�ur alle a 2 R:Konstanter Faktor : af ist an der Stelle x0 stetig: (8.13)Summe : f + g ist an der Stelle x0 stetig: (8.14)Produkt : f � g ist an der Stelle x0 stetig: (8.15)Quotient : fg ist an der Stelle x0 stetig; falls g(x0) 6= 0:(8.16)Komposition : g Æ f ist an der Stelle x0 stetig;falls f(x) an der Stelle x = x0 stetig istund g(z)an der Stelle z = f(x0) stetig ist: (8.17)Beweis von (8.13) { (8.17):Die ersten vier Aussagen folgen direkt aus den Re henregeln f�ur Grenzwerte (8.4) {(8.7). Wir beweisen deshalb nur die f�unfte Aussage.In Kapitel 1 wurde die Komposition g Æ f zweier reeller Funktionen f und g alsHintereinanderausf�uhrung x 7! g(f(x)) eingef�uhrt. Unter den in (8.17) genanntenVoraussetzungen gilt dann:limx!x0(g Æ f)(x) = limx!x0 g(f(x))= g( limx!x0 f(x))= g(f( limx!x0 x))= g(f(x0))= (g Æ f)(x0)Damit ist gezeigt, dass die Funktion g Æ f stetig ist. 2

8.2. STETIGKEIT 97BEISPIEL 1: Anwendung der Produktregel:Die Potenzfunktion f : R! R; x 7! xk ist f�ur alle k 2 N stetig.Dies sieht man folgenderma�en: Wir wissen, dass die Funktion f(x) = xstetig ist.Einmaliges Anwenden der Produktregel ergibt, dass f(x) = x2 stetig ist.No hmaliges Anwenden der Produktregel ergibt, dass f(x) = x3 stetig ist.So erh�alt man na h k�maligem Anwenden der Produktregel, dass f(x) =xk stetig ist. 2BEISPIEL 2: Konstanter Faktor:Na h Beispiel 1 sind die Potenzfunktionen f(x) = xk f�ur alle k 2 Nstetig. Die Regel �uber konstante Faktoren (8.4) ergibt dann, dass au h dieFunktionen f(x) = axk f�ur alle a 2 R stetig sind.BEISPIEL 3: Anwendung der Summenregel:Zusammen mit den letzten beiden Beispielen folgt aus der Summenregel,dass jedes Polynom f : R! R; x 7!Pnk=0 akxk mit ak 2 R stetig ist.BEISPIEL 4: Stetigkeit der Betragsfunktion:Die Betragsfunktion f : R! R; x 7! jxj ist trotz ihres Kni ks bei x0 = 0stetig. Ans hauli h ist die Stetigkeit dadur h gegeben, dass man die Be-tragsfunktion ohne Absetzen zei hnen kann. Der ausf�uhrli he Beweis ist zur�Ubung empfohlen.8.2.1 S�atze �uber stetige FunktionenIn diesem Abs hnitt geben wir drei ans hauli h sofort einsi htige S�atze an, die wirsp�ater immer wieder ben�otigen werden.Der Nullstellensatz von Bolzano besagt, dass der Graph einer stetigen Funktion diex�A hse s hneiden mu�, wenn es einen Funktionswert unterhalb der x�A hse undeinen oberhalb der x�A hse gibt.Zur Wiederholung: Eine Nullstelle x0 einer Funktion f ist eine Stelle mit f(x0) = 0.Satz (Nullstellensatz):Sei a; b 2 R, a < b und f : [a; b℄! R stetig. Ist weiterhin f(a) < 0 und f(b) > 0(oder f(a) > 0 und f(b) < 0), so hat f in [a; b℄ eine Nullstelle x0.BEMERKUNG: Es sei an dieser Stelle daran erinnert, dass die Aussage \f hat eineNullstelle" na h der mathematis hen Spra hregelung bedeutet, dass f mindestenseine Nullstelle hat.Die Aussage des Nullstellensatzes ist ans hauli h gesehen fast trivial, denn steti-ge Funktionen sind ja gerade diejenigen Funktionen, deren Graph ohne Absetzengezei hnet werden kann.Der Zwis henwertsatz von Bolzano verallgemeinert den Nullstellensatz:

98 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEITx01
x02
x03
y
xa b
f(a)
f(b)
Abbildung 8.2: Skizze zum Nullstellensatz.Satz (Zwis henwertsatz):Sei a; b 2 R, a < b und f : [a; b℄ ! R stetig. Dann nimmt f jeden Wertzwis hen f(a) und f(b) an. Genauer gesagt: Liegt d zwis hen f(a) und f(b),gibt es (mindestens) ein mit a < < b, so dass f( ) = d.y
f(b)
a
f(a)
x
d
bcAbbildung 8.3: Skizze zum Zwis henwertsatz.Die Aussage des Zwis henwertsatzes folgt direkt aus dem Nullstellensatz. Setzt mann�amli h g(x) = f(x) � d, gilt entweder g(a) > 0 und g(b) < 0 oder aber g(a) < 0und g(b) > 0. Damit erf�ullt g die Bedingungen des Nullstellensatzes.Ans hauli h bedeutet der Zwis henwertsatz, dass stetige Funktionen keine Spr�ungeaufweisen. Sie nehmen vielmehr alle Zwis henwerte zwis hen den beiden Funktions-werten f(a) und f(b) an.F�ur den dritten Satz ben�otigen wir no h zwei De�nitionen:De�nition (Maximum und Minimum):Nimmt eine reellwertige Funktion f : M ! R ihre kleinste obere S hranke an,so hei�t dieser Funktionswert Maximum der Funktion.Man s hreibt daf�ur max f , maxx2M f(x) oder au h maxff(x) : x 2Mg.Nimmt eine reellwertige Funktion f : M ! R ihre gr�o�te untere S hranke an,so hei�t dieser Funktionswert Minimum der Funktion.Man s hreibt daf�ur min f , minx2M f(x) oder au h minff(x) : x 2Mg.BEMERKUNG: Eine Funktion muss ihre kleinste obere S hranke ni ht unbedingtannehmen, wie am Beispiel der Funktion f : R+ ! R; f(x) = �x deutli h wird.Die kleinste obere S hranke dieser Funktion ist Null. Die Funktion nimmt diesenFunktionswert jedo h ni ht an, da x = 0 ni ht mehr im De�nitionsgebiet von fliegt. Siehe dazu au h Abbildung 8.4.
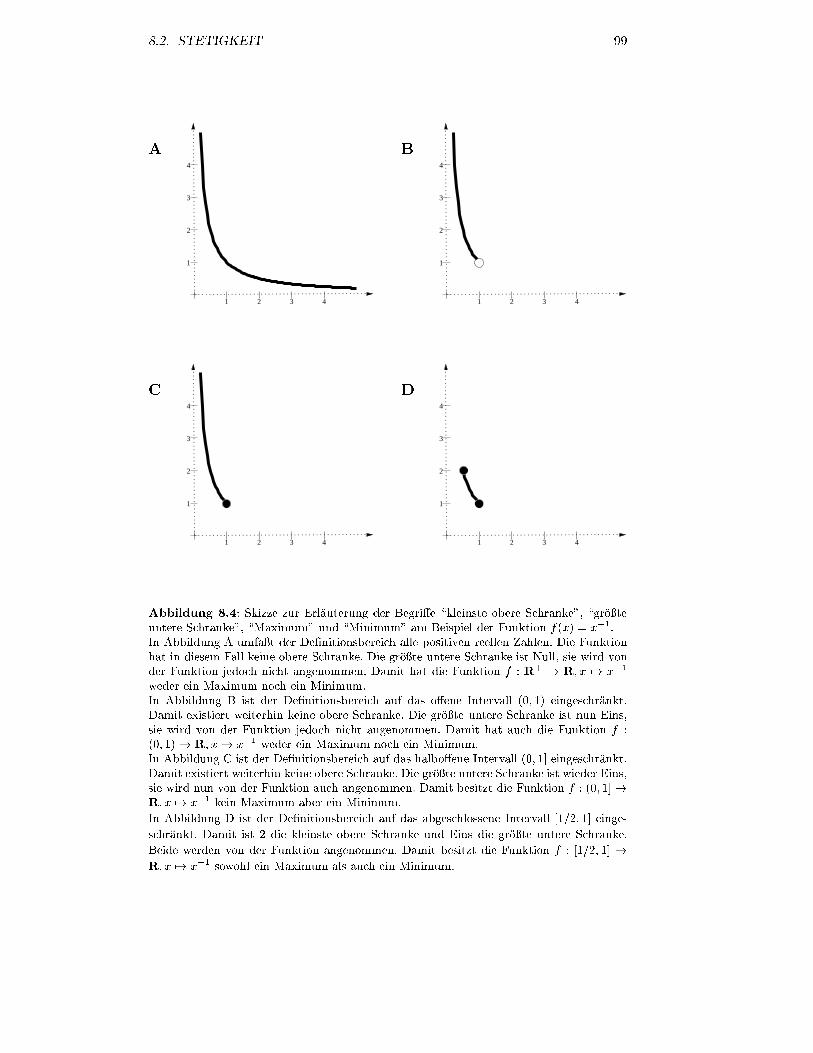
8.2. STETIGKEIT 99A
1
2
3
4
1 2 3 4
B1
2
3
4
1 2 3 4
C1
2
3
4
1 2 3 4
D1
2
3
4
1 2 3 4Abbildung 8.4: Skizze zur Erl�auterung der Begri�e \kleinste obere S hranke", \gr�o�teuntere S hranke", \Maximum" und \Minimum" am Beispiel der Funktion f(x) = x�1.In Abbildung A umfa�t der De�nitionsberei h alle positiven reellen Zahlen. Die Funktionhat in diesem Fall keine obere S hranke. Die gr�o�te untere S hranke ist Null, sie wird vonder Funktion jedo h ni ht angenommen. Damit hat die Funktion f : R+ ! R; x 7! x�1weder ein Maximum no h ein Minimum.In Abbildung B ist der De�nitionsberei h auf das o�ene Intervall (0; 1) einges hr�ankt.Damit existiert weiterhin keine obere S hranke. Die gr�o�te untere S hranke ist nun Eins,sie wird von der Funktion jedo h ni ht angenommen. Damit hat au h die Funktion f :(0; 1)! R; x 7! x�1 weder ein Maximum no h ein Minimum.In Abbildung C ist der De�nitionsberei h auf das halbo�ene Intervall (0; 1℄ einges hr�ankt.Damit existiert weiterhin keine obere S hranke. Die gr�o�te untere S hranke ist wieder Eins,sie wird nun von der Funktion au h angenommen. Damit besitzt die Funktion f : (0; 1℄!R; x 7! x�1 kein Maximum aber ein Minimum.In Abbildung D ist der De�nitionsberei h auf das abges hlossene Intervall [1=2; 1℄ einge-s hr�ankt. Damit ist 2 die kleinste obere S hranke und Eins die gr�o�te untere S hranke.Beide werden von der Funktion angenommen. Damit besitzt die Funktion f : [1=2; 1℄ !R; x 7! x�1 sowohl ein Maximum als au h ein Minimum.

100 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEITMit Hilfe der De�nitionen von Maximum und Minimum k�onnen wir nun den Satzvon Weierstrass �uber Maximum und Minimum angeben:Satz vom Maximum und Minimum:Sei a; b 2 R, a < b und f : [a; b℄ ! R stetig, dann gibt es mindestens eineStelle x1 2 [a; b℄, an der die Funktion ihr Minimum annimmt, und eine Stellex2 2 [a; b℄, an der die Funktion ihr Maximum annimmt.y
axb
Max
MinAbbildung 8.5: Skizze zum Satz vom Maximum und Minimum.BEMERKUNG: Essentiell f�ur die G�ultigkeit des Satzes vom Maximum und Mi-nimum ist die Wahl eines abges hlossenen Intervalls [a; b℄ | eines Intervalls, dasseine beiden Grenzen a und b enth�alt. Das obige Beispiel der Funktion f : R+ !R; f(x) = �x erf�ullt diese Bedingung ni ht.Der folgende Beweis zum Nullstellensatz ist au h deshalb aufgef�uhrt, weil er sehrs h�on die zwingende Logik mathematis her Beweisf�uhrung verdeutli ht:Beweis des Nullstellensatzes:Wir de�nieren rekursiv die Folgen (an)n2N und (bn)n2N dur h die folgende Vor-s hrift:Anfangswert der beiden Folgen: a1 = a und b1 = b.Rekursionsvors hrift:Die Folgenglieder an+1 und bn+1 erh�alt man wie folgt aus den Gliedern an und bn:Wir betra hten die Zahl an+bn2 . Diese liegt auf der x-A hse genau zwis hen an undbn. Es gibt nun drei M�ogli hkeiten:1.Fall: f �an+bn2 � > 0.In diesem Fall setzen wir an+1 = an und bn+1 = an+bn2 :2.Fall: f �an+bn2 � = 0.Unsere Su he ist beendet. Wir haben die gew�uns hte Nullstelle gefunden.3.Fall: f �an+bn2 � < 0.In diesem Fall setzen wir an+1 = an+bn2 und bn+1 = bn.Die Folge (an)n2N ist monoton wa hsend und na h oben bes hr�ankt, die Folge(bn)n2N ist monoton fallend und na h unten bes hr�ankt. Na h dem Satz zur mo-notonen Konvergenz (Kapitel 5.3) konvergieren beide Folgen. Man kann si h nun�uberlegen, dass beide Folgen na h Konstruktion gegen denselben Grenzwert konver-gieren m�ussen. Diesen Grenzwert nennen wir p:limn!1 an = limn!1 bn = pWir zeigen nun, dass der Grenzwert p die gesu hte Nullstelle ist:Da f(an) < 0 ist f�ur alle n 2 N gilt: 0 � limn!1 f(an).Da f stetig ist, gilt: limn!1 f(an) = f(limn!1 an) = f(p)Zusammengenommen ergibt das: 0 � f(p).Analog argumentiert man mit der Folge (bn)n2N und erh�alt: 0 � f(p).Insgesamt erhalten wir f(p) = 0: Der Grenzwert p ist die gesu hte Nullstelle. 2

8.3. AUFGABEN 1018.3 Aufgaben1. (Grenzwerte) Gegeben ist die Funktionf(x) = � 2 ; x = 31 ; x 6= 3(a) Wel hen Funktionswert hat f(x) an der Stelle x = 3 ?(b) Skizzieren Sie den Graphen der Funktion f(x) !( ) Wel hen Grenzwert hat f(x) f�ur x ! 3 ? (wie lauten der re hts- und derlinksseitige Grenzwert?)2. (Grenzwerte) Gegeben ist die Funktiong(x) = 1x� 2 + 1(a) Wie geht diese Funktion aus der Hyperbel h(x) = 1=x hervor?(b) Skizzieren Sie den Graphen der Funktion g(x) !( ) Wie lauten der linksseitige und der re htsseitige Grenzwert limx!2� g(x) undlimx!2+ g(x) ?(d) Existiert limx!2 g(x), limx!1 g(x) ?3. (Funktionen) Die beiden Hyperbelfunktionen sinh(x) (lies: sinus hyperbo-li us) und osh(x) (lies: osinus hyperboli us) sind de�niert alssinh(x) = ex � e�x2 und osh(x) = ex + e�x2(a) Wel hen Funktionswert haben sinh(x) und osh(x) an der Stelle x = 0 ?(b) Wel he Grenzwerte haben die beiden Funktionen f�ur x! �1?( ) Wel he Art von Symmetrie zeigen diese Funktionen?(d) Skizzieren Sie die Graphen der beiden Funktionen!4. (Grenzwerte von Funktionen) �Uberpr�ufen Sie ob die folgende Grenzwerte exi-stieren und bere hnen Sie gegebenenfalls ihre Werte:(a) limx!0 2x2(b) limx!1 1(x� 1)3( ) limx!1 2x4 + 5x3x7 (d) limx!�1 8x21 + 2x13 � 20x34x21 � x4(e) limx!0 8x21 + 2x13 � 20x34x21 � x4(f) limx!x0 x2 � x20x� x0

102 KAPITEL 8. GRENZWERTE VON FUNKTIONEN UND STETIGKEIT

Kapitel 9Di�erentiationWill man den groben Verlauf einer Funktion f : R ! R; x 7! f(x) verstehen,so wird man damit beginnen, Funktionswerte an ausgew�ahlten Stellen wie x = 0,x = 1, oder x = �1 zu bere hnen. Dieses Vorgehen liegt nahe, ist jedo h letztli hni ht gut motiviert: Warum sollte man den Wert der Funktion gerade an den dreigenannnten Stellen bere hnen, und ni ht an zwei, oder f�unf, oder au h siebzehnanderen Stellen? Solange man f no h ni ht kennt, ist ja kein x-Wert in irgendeinerWeise gegen�uber anderen x-Werten ausgezei hnet. Um den Verlauf einer Funktionzu verstehen, sollte man deshalb vor allem Fragen stellen, die qualitative Eigen-s haften der Funktion gezielt angehen. Dazu geh�ort die Frage, wie si h die Funktionf�ur sehr gro�e und sehr kleine Argumente verh�alt, limx!1 f(x) und limx!�1 f(x),und wo ihre Nullstellen liegen, also die x-Werte, f�ur die f(x) = 0 gilt. Von beson-derer Bedeutung f�ur das Verst�andnis einer Funktion ist au h die Frage, f�ur wel heArgumente die Funktion w�a hst oder f�allt, ob sie ein Maximum oder Minimumbesitzt, und wo diese Extremwerte liegen.Ein zweiter, verwandter Fragenkreis: Bei der Analyse experimenteller Daten istoft ni ht allein der Wert der Messgr�o�e an einer gewissen Stelle oder zu einemgewissen Zeitpunkt von Bedeutung, sondern au h Fragen zur r�aumli hen oder zeit-li hen Ver�anderung einer Variablen: \Mit wel her Rate nimmt die Zellpopulationab?", \Wie gro� ist die r�aumli he (oder zeitli he) Variation der Konzentration einerSubstanz?" oder \Zu wel hem Zeitpunkt errei ht das Aktionspotential sein Maxi-mum?". . .Ein dritter, ebenfalls verwandter Themenberei h: In Kapitel 6 und 7 dieses Skripteswerden dynamis he Prozesse auf ph�anomenologis her Ebene mit Hilfe von IteriertenAbbildungen bes hrieben. Die Zeit t wird hier also als eine diskrete Variable aufge-fa�t, die si h s hrittweise �andert. Damit wird jedo h die kontinuierli he Natur derZeit ni ht ber�u ksi htigt. Dagegen beruhen die Grundgesetze der Physik und davonabgeleitete biophysikalis he Modelle auf einer in der Zeit kontinuierli hen Entwi k-lung eines dynamis hen Systems. Wie kann man derartige Bewegungsglei hungenmathematis h bes hreiben und analysieren?Alle drei Fragenkomplexe k�onnen mit Hilfe des Konzeptes \Ableitung" oder \Dif-ferentialquotient" behandelt werden, das wir nun ausf�uhrli h er�ortern wollen.
103

104 KAPITEL 9. DIFFERENTIATION9.1 De�nition und geometris he InterpretationAufbauend auf dem Grenzwertbegri� f�ur Funktionen de�nieren wir nun die Di�e-renzierbarkeit einer Funktion:De�nition (Di�erenzierbarkeit):Die reelle Funktion f : R ! R; x 7! f(x) sei auf einem beliebigen IntervallM � R de�niert. Die Funktion hei�t di�erenzierbar an der Stelle x0 2M ,wenn der Grenzwertv limx!x0 f(x)� f(x0)x� x0 oder; was dasselbe ist; limh!0 f(x0 + h)� f(x0)h (9.1)exisitiert und endli h ist.Dieser Grenzwert wird au h mit f 0(x0) bezei hnet,f 0(x0) = limx!x0 f(x)� f(x0)x� x0 = limh!0 f(x0 + h)� f(x0)h ; (9.2)und hei�t Ableitung von f na h x an der Stelle x0.Diese Notation geht auf Newton [1642-1727℄ zur�u k. Eine alternative S hreibwei-se stammt von seinem Zeitgenossen und Konkurrenten Leibniz [1646-1716℄. Stattf 0(x0) s hreibt man hier in mehreren Variantenf 0(x0) = dfdx (x0) = dfdx ����x0 = df(x)dx ����x0 = ddxf ����x0 = ddxf(x)����x0 (9.3)und nennt die Gr�o�e df=dx Di�erentialquotient (lies: \df na h dx").Notiz:Ist der Ausdru k (9.1) f�ur alle x0 2M de�niert, so kann man aus der Funktionf eine neue Funktion f 0 :M ! R; x 7! f 0(x) erzeugen, indem man jedem x denWert der Ableitung an dieser Stelle zuordnet. Diese Funktion wird Ableitungvon f genannt.BEMERKUNG: Bei der De�nition des Di�erentialquotienten zahlt es si h jetztaus, dass der Begri� Grenzwert limx!x0 f(x) ohne Bezug auf den Wert von f ander Stelle x0 eingef�uhrt wurde. Ansonsten w�urde man hier auf das Problem einerDivision von Null dur h Null sto�en!BEISPIEL 1: Die Ableitung der konstanten Funktion f(x) = ist f 0(x) = 0.Beweis: limx!x0 f(x) � f(x0)x� x0 = limx!x0 � x� x0 = limx!x0 0x� x0 = 0BEISPIEL 2: Die Ableitung der linearen Funktion f(x) = ax ist f 0(x) = a.Beweis:limx!x0 f(x) � f(x0)x� x0 = limx!x0 ax� ax0x� x0 = a limx!x0 x� x0x� x0 = a

9.1. DEFINITION UND GEOMETRISCHE INTERPRETATION 105BEISPIEL 3: Die Ableitung der quadratis hen Funktion f(x) = x2 istf 0(x) = 2x.Beweis:limx!x0 f(x)� f(x0)x� x0 = limx!x0 x2 � x20x� x0 = limx!x0 (x� x0)(x+ x0)x� x0 = limx!x0(x+x0) = 2x0BEISPIEL 4: F�ur die Ableitung der Betragsfunktion f(x) = jxj an derStelle x0 gilt: F�ur positive x0 ist jxj0 = 1, f�ur negative x0 ist jxj0 = �1 undan der Stelle x0 = 0 ist die Betragsfunktion ni ht di�erenzierbar.Beweis:1. Fall (x0 > 0):F�ur positive x0 ist jx0j = x0. Weiterhin gilt: Ist x0 positiv, so wird au hx positiv sein (und damit jxj = x gelten), wenn die Di�erenz x0 � x nurgen�ugend klein ist. Zusammen folgt aus beiden Ergebnissen:limx!x0 jxj � jx0jx� x0 = limx!x0 x� x0x� x0 = limx!x0(1) = 12. Fall (x0 < 0):F�ur negative x0 ist jx0j = �x0. Weiterhin gilt: Ist x0 negativ, so wird au hx negativ sein (und damit jxj = �x gelten), wenn die Di�erenz x0 � x nurgen�ugend klein ist. Zusammen folgt aus beiden Ergebnissen:limx!x0 jxj � jx0jx� x0 = limx!x0 �x� (�x0)x� x0 = limx!x0 �(x� x0)x� x0 = limx!x0(�1) = �13. Fall (x0 = 0): limx!0 jxj � j0jx� 0 = limx!0 jxjx = limx!0 sign(x)Der Grenzwert der Signumfunktion sign(x) ist an der Stelle x0 = 0 ni htde�niert. Damit ist die Betragsfunktion f�ur x0 = 0 ni ht di�erenzierbar.ZUSAMMENFASSUNG: Na h Kapitel 8.2 ist die Betragsfunktion stetig | mankann ihren Graph zei hnen ohne abzusetzen. Ihre Ableitung ist f�ur alle x0 6= 0dur h die Signumfunktion gegeben, f�ur x0 = 0 jedo h ni ht de�niert | ans hauli hentspri ht dies genau dem s harfen Kni k der Betragsfunktion an dieser Stelle.BEISPIEL 5: Die Ableitung der Signumfunktion f(x) = sign(x) = x=jxj ander Stelle x0 ist f�ur alle x0 6= 0 glei h null. An der Stelle x0 = 0 ist dieSignumfunktion ni ht di�erenzierbar.Beweis:1. Fall (x0 > 0):F�ur positive x0 ist sign(x0) = 1. Weiterhin gilt: Ist x0 positiv, so wird au hx positiv sein, wenn die Di�erenz x0 � x nur gen�ugend klein ist. Damit istau h sign(x) = 1, wenn x0 �x nur gen�ugend klein ist. Zusammen folgt ausbeiden Ergebnissen:limx!x0 sign(x)� sign(x0)x� x0 = limx!x0 1� (1)x� x0 = limx!x0 0x� x0 = 02. Fall (x0 < 0):F�ur negative x0 ist sign(x0) = �1. Weiterhin gilt: Ist x0 negativ, so wirdau h x negativ sein, wenn die Di�erenz x0�x nur gen�ugend klein ist. Damitist au h sign(x) = �1, wenn x0�x nur gen�ugend klein ist. Zusammen folgtaus beiden Ergebnissen:limx!x0 sign(x)� sign(x0)x� x0 = limx!x0 �1� (�1)x� x0 = limx!x0 0x� x0 = 03. Fall (x0 = 0): limx!x0 sign(x)� sign(0)x� 0 = limx!x0 sign(x)x

106 KAPITEL 9. DIFFERENTIATIONDie Signumfunktion nimmt f�ur alle x 6= 0 einen von Null vers hiedenen Wertan, minus Eins f�ur x < 0 und plus Eins f�ur x > 0. F�ur jede Folge (xn)n2N,die gegen Null konvergiert, w�a hst daher der Quotient sign(xn)=xn �uberalle Grenzen. Damit ist der Grenzwert limx!x0 sign(x)x ni ht de�niert.ZUSAMMENFASSUNG: Die Ableitung der Signumfunktion vers hwindet f�ur allex0 6= 0 und ist f�ur x0 = 0 ni ht de�niert. An dieser Stelle hat die Funktion keinenGrenzwert (siehe au h Beispiel 3 in Kapitel 8.1), ist deshalb ni ht stetig und kanndamit au h ni ht di�erenzierbar sein.y
x-1 1
1
0
y
x
-1
1
Abbildung 9.1: Graph der Betragsfunktion f(x) = jxj und der Signumfunktion f(x) =sign(x).9.1.1 Geometris he Interpretation und Tangentenglei hungWir wollen nun zeigen, dass die Ableitung einer Funktion f an der Stelle x0 alsSteigung der Tangente an der Stelle x0 interpretiert werden kann. Dazu vorweg eineDe�nition und eine \Erinnerung":De�nition (Sekante):Eine Gerade, die eine Funktion f in zwei Punkten (x1; f(x1)) und (x2; f(x2))s hneidet, hei�t Sekante dur h die Punkte (x1; f(x1)) und (x2; f(x2)).Notiz (Steigung einer Geraden):Die Steigung einer Geraden, die dur h zwei Punkte (x1; y1) und (x2; y2) l�auft,ist das Verh�altnis der zugeh�origen A hsenabs hnitte, also der Quotient y2�y1x2�x1 .Siehe au h Glei hung (2.16).Die Steigung der Sekante dur h die zwei Punkte (x; f(x)) und (x0; f(x0)) ist damitdur h den Ausdru k f(x)�f(x0)x�x0 gegeben.L�asst man nun x sukzessive immer n�aher an x0 wandern, s hmiegt si h die Sekanteimmer enger an den Graphen der Funktion an, bis sie s hlie�li h zur Tangente an
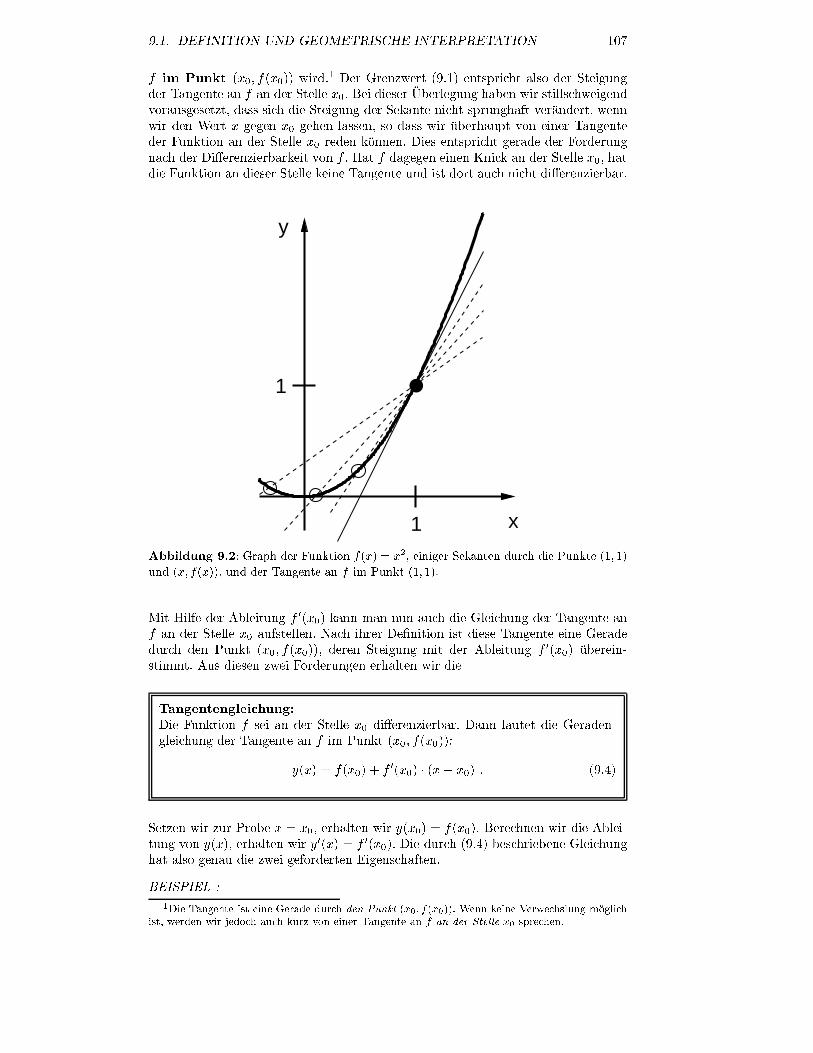
9.1. DEFINITION UND GEOMETRISCHE INTERPRETATION 107f im Punkt (x0; f(x0)) wird.1 Der Grenzwert (9.1) entspri ht also der Steigungder Tangente an f an der Stelle x0. Bei dieser �Uberlegung haben wir stills hweigendvorausgesetzt, dass si h die Steigung der Sekante ni ht sprunghaft ver�andert, wennwir den Wert x gegen x0 gehen lassen, so dass wir �uberhaupt von einer Tangenteder Funktion an der Stelle x0 reden k�onnen. Dies entspri ht gerade der Forderungna h der Di�erenzierbarkeit von f . Hat f dagegen einen Kni k an der Stelle x0, hatdie Funktion an dieser Stelle keine Tangente und ist dort au h ni ht di�erenzierbar.
1
1 x
y
Abbildung 9.2: Graph der Funktion f(x) = x2, einiger Sekanten dur h die Punkte (1; 1)und (x; f(x)), und der Tangente an f im Punkt (1; 1).Mit Hilfe der Ableitung f 0(x0) kann man nun au h die Glei hung der Tangente anf an der Stelle x0 aufstellen. Na h ihrer De�nition ist diese Tangente eine Geradedur h den Punkt (x0; f(x0)), deren Steigung mit der Ableitung f 0(x0) �uberein-stimmt. Aus diesen zwei Forderungen erhalten wir dieTangentenglei hung:Die Funktion f sei an der Stelle x0 di�erenzierbar. Dann lautet die Geraden-glei hung der Tangente an f im Punkt (x0; f(x0)):y(x) = f(x0) + f 0(x0) � (x � x0) : (9.4)Setzen wir zur Probe x = x0, erhalten wir y(x0) = f(x0). Bere hnen wir die Ablei-tung von y(x), erhalten wir y0(x) = f 0(x0). Die dur h (9.4) bes hriebene Glei hunghat also genau die zwei geforderten Eigens haften.BEISPIEL :1Die Tangente ist eine Gerade dur h den Punkt (x0; f(x0)). Wenn keine Verwe hslung m�ogli hist, werden wir jedo h au h kurz von einer Tangente an f an der Stelle x0 spre hen.

108 KAPITEL 9. DIFFERENTIATIONWie lautet die Glei hung der Tangente der Funktion f(x) = x2 an der Stellex0 = 1?Die Ableitung der Funktion ist f 0(x) = 2x, also gilt f 0(1) = 2. Mit (9.4)erhalten wir daraus y(x) = f(1) + f 0(1) � (x� 1) = 1+ 2(x� 1) = 2x� 1.Setzt man in diese Glei hung x = 1 ein, erh�alt man y(1) = 1, bere hnetman die Steigung der Gerade, erh�alt man y0(1) = 2. Beide Werte stimmenwie gefordert mit den entspre henden Werten von Funktion f an der Stellex0 = 1 �uberein.Wie lautet die Glei hung der Tangente an der Stelle x0 = �1?Mit der glei hen Argumentation erhalten wir nun:y(x) = f(�1) + f 0(�1) � (x� (�1)) = 1 + (�2) � (x+ 1) = �2x� 1.9.1.2 Zusammenhang von Stetigkeit und Di�erenzierbarkeitIn Beispiel 4 von Abs hnitt 9.1 haben wir mit der Betragsfunktion f(x) = jxj eineFunktion kennen gelernt, die an der Stelle 0 zwar stetig, aber ni ht di�erenzierbarist. Ans hauli h gesehen liegt das daran, dass der Graph im Punkt (0; 0) einen Kni khat.Also sind ni ht alle stetige Funktionen au h di�erenzierbar. Man kann si h aberfragen, ob alle di�erenzierbaren Funktionen stetig sind. Diese Frage beantwortetder folgende Satz:Satz (Di�erenzierbarkeit impliziert Stetigkeit):Ist eine Funktion f : R ! R; x 7! f(x) an der Stelle x0 di�erenzierbar, so istsie dort au h stetig.Die Umkehrung des Satzes lautet:Ist eine Funktion f : R ! R; x 7! f(x) an der Stelle x0 ni ht stetig, so ist siedort au h ni ht di�erenzierbar.Beweis:Die Funktion f(x) sei an der Stelle x0 di�erenzierbar. Dann existiert na h De�nition(9.1) der Grenzwert limx!x0 f(x)�f(x0)x�x0 und hat einen endli hen Wert. Damit giltlimx!x0[f(x)� f(x0)℄= limx!x0[f(x)� f(x0)℄(x� x0)x� x0= limx!x0[f(x)� f(x0)℄x� x0 � limx!x0(x� x0) = 0 ;wobei im letzten S hritt ausgenutzt wurde, dass ganz allgemein limx!x0(x�x0) = 0und limx!x0 f(x)�f(x0)x�x0 na h Voraussetzung endli h ist.Der erste Ausdru k kann als limx!x0[f(x) � f(x0)℄ = limx!x0 f(x) � limx!x0 f(x0) =limx!x0[f(x)℄ � f(x0) ges hrieben werden. Damit gilt insgesamt limx!x0[f(x)℄ = f(x0).Die Funktion f ist also stetig. 2BEISPIEL : Die Signumfunktion ist an der Stelle x0 = 0 ni ht di�erenzier-bar. Na h Beispiel 3 in Kapitel 8.1 hat die Signumfunktion an der Stelle x0 = 0keinen Grenzwert, ist dort also au h ni ht stetig. Damit ist sie na h demobigen Satz an dieser Stelle au h ni ht di�erenzierbar. Explizit wurde diess hon in Beispiel 5 von Kapitel 9.1 gezeigt.

9.2. ABLEITUNGSREGELN 1099.2 AbleitungsregelnDie folgenden Regeln gelten zun�a hst punktweise an einer Stelle x0. Sind jedo hdie Voraussetzungen f�ur alle x0 2 R erf�ullt, so k�onnen die Regeln entspre hend alsAussagen �uber die Funktionen f 0 : R! R; x 7! f 0(x) interpretiert werden.9.2.1 Summen-, Produkt- und QuotientenregelKonstanter Faktor, Summen-, Produkt- und QuotientenregelSeien f; g :M ! R in x0 di�erenzierbare Funktionen und a 2 R. Dann gilt:Konstanter Faktor : ddx (a � f) = a � ddxf (9.5)Summenregel : ddx (f + g) = ddxf + ddxg (9.6)Produktregel : ddx (f � g) = ( ddxf) � g + f � ddxg (9.7)Quotientenregel : ddx �fg� = ( ddxf) � g � f � ddxgg2 (9.8)BEMERKUNG: Auf der re hten Seite von (9.7) und (9.8) ers heint der Term df=dxin Klammern, um deutli h zu ma hen, dass die Ableitung hier nur auf die Funktionf wirkt, und ni ht au h auf g wie im Ausdru k d=dx (fg) der linken Seite von (9.7).Beweis von (9.5) { (9.8):Die ersten beiden Aussagen folgen direkt aus der De�nition (9.1) und werden zur�Ubung empfohlen.2Beweis der Produktregel:Bevor wir die De�nition (9.1) auf die Funktion h(x) = f(x) � g(x) anwenden, formenwir den Di�erenzenquotienten dur h Einf�ugen von 0 = � f(x0)g(x)x�x0 + f(x0)g(x)x�x0 wiefolgt um:f(x)g(x) � f(x0)g(x0)x� x0 = [f(x)� f(x0)℄ � g(x)x� x0 + f(x0) � [g(x)� g(x0)℄x� x0 (9.9)Damit k�onnen wir nun die Re henregeln (8.5) und (8.6) f�ur den Grenzwert einerSumme und eines Produktes zweier Funktionen ben�utzen und erhalten:limx!x0 f(x)g(x) � f(x0)g(x0)x� x0= limx!x0 f(x)� f(x0)x� x0 limx!x0 g(x) + f(x0) limx!x0 g(x)� g(x0)x� x0 (9.10)Da g als di�erenzierbar angenommen wird, ist g na h Absatz 9.1.2 au h stetig, sodass limx!x0 g(x) = g(x0). Daraus folgt (9.7). 2Beweis der Quotientenregel:Wir betra hten nur den Fall f(x) = 1 und zeigen ddx � 1g � = � ddx gg2 . Der allgemeineFall folgt dann mit Hilfe der Produktregel (9.7).1g(x) � 1g(x0)x� x0 = � 1g(x)g(x0) � g(x)� g(x0)x� x0 (9.11)2Zusammen genommen bedeuten diese zwei Ausssagen, dass die mathematis he Operation \Dif-ferentiation einer Funktion" eine lineare Operation ist, da f�ur beliebige di�erenzierbare Funktionenf und g und beliebige �; � 2 R gilt: ddx (�f + �g) = � ddxf + � ddxg.

110 KAPITEL 9. DIFFERENTIATIONBildet man nun wie in (9.10) den Grenzwert, erh�alt man (9.8). 2BEISPIEL 1: Multiplikation mit einem konstanten Faktor:Sei f(x) = 5x2. Dann gilt: ddx(5x2) = 5 � d(x2)dx = 5 � 2x = 10x :BEISPIEL 2: Summenregel:Sei f(x) = x2, g(x) = x. Dann gilt: ddx (x2 + x) = d(x2)dx + d(x)dx = 2x+ 1 :BEISPIEL 3: Produktregel:Wir wollen die Ableitung von x3 bere hnen und setzen dazu f(x) = x2 undg(x) = x. Dann gilt: ddx(x3) = ddx(x2 � x) = 2x � x+ x2 � 1 = 3x2 :BEISPIEL 4: Ableitung von Potenzfunktionen:Dur h sukzessives Anwenden der Produktregel wie in Beispiel 3 erhalten wirddx (xn) = nxn�1 f�ur n 2 N : (9.12)BEISPIEL 5: Ableitung eines Polynoms:F�ur die Ableitung eines Polynoms f(x),f(x) = nXk=0 akxk ; (9.13)folgt aus (9.12) und der Summenregel (9.6):ddxf = nXk=0 k �akxk�1 = nXk=1 k �akxk�1 mit ak 2 R : (9.14)BEISPIEL 6: Ableitung einer Potenzreihe:Polynome haben endli h viele Glieder. In glei her Weise, wie wir in Kapi-tel 5.4 eine Reihe als Grenzwert einer Summe mit unendli h vielen Gliederneinf�uhrten, de�nieren wir nun den Begri� Potenzreihe als Grenzwert einesPolynoms mit unendli h vielen Gliedern. Existiert dieser Grenzwert, s hrei-ben wir f(x) = 1Xk=0 akxk : (9.15)Im Gegensatz zu den bisher betra hteten Reihen handelt es si h nun ni htum eine Reihe von Zahlen, sondern um eine Reihe von Potenzfunktionen.Sehen Sie den Unters hied?Die Ableitung einer Potenzreihe ist analog zu (9.14) dur hddxf = 1Xk=1 k �akxk�1 mit ak 2 R (9.16)gegeben.BEISPIEL 7: Quotientenregel:Wir wollen die Ableitung von f(x) = x�1 = 1=x bere hnen.Aus (9.8) folgt: ddx(x�1) = [0 � x� 1 � 1℄=x2 = �x�2.

9.2. ABLEITUNGSREGELN 1119.2.2 Ableitung von Funktion und UmkehrfunktionOft su ht man die Ableitung einer Funktion f , von deren Umkehrfunktion f�1 dieAbleitung s hon bekannt ist. Hier hilft folgende Beoba htung:Funktion und Umkehrfunktion gehen dur h Spiegelung an der Winkelhalbierendenauseinander hervor | siehe au h Kapitel 2.1. Bei dieser Spiegelung wird beispiels-weise der Punkt (x; f(x)) in den Punkt (f(x); x) gespiegelt. Ist nun die Steigungder Tangente an f im Punkt (x0; f(x0)) glei h m, wobei wir m 6= 0 annehmen wol-len, so ist die Steigung der Tangente an f�1 im Punkt (f(x0); x0) glei h m�1. Istbeispielsweise die Steigung der Tangente an f im Punkt (x0; f(x0)) glei h 1:25, be-deutet dies na h der Notiz zu Beginn von Abs hnitt 9.1, dass si h y- zu x-Abs hnittim Steigungsdreie k wie 1:25 : 1 verhalten. Spiegelt man diese Gerade, betr�agt dasVerh�altnis 1 : 1:25 = 0:8 : 1. Siehe au h Abbildung 9.3.1
y
0 1 x
f(x) = x
x f(x )
f (x) = x2
0
-1
0Abbildung 9.3: Graph der Funktion f(x) = px und f�1(x) = x2.Damit ist der Wert der Ableitung der Funktion f genau das Inverse des Wertes derAbleitung ihrer Umkehrfunktion f�1. Allerdings muss man bea hten, dass die zweiAbleitungen an unters hiedli hen Stellen bere hnet werden | die Ableitung von fan der Stelle x0, die von f�1 an der Stelle f(x0). Insgesamt erhalten wir also:Satz (Ableitung von Funktion und Umkehrfunktion):Die Umkehrfunktion f�1 der Funktion f sei an der Stelle f(x0) di�erenzier-bar und die Ableitung von f�1 sei an dieser Stelle von Null vers hieden,(f�1)0(f(x0)) 6= 0. Dann gilt:Die Funktion f ist an der Stelle x0 di�erenzierbar. Ihre Ableitung lautet:f 0(x0) = 1(f�1)0(f(x0)) (9.17)BEISPIEL : Ableitung der Quadratwurzelfunktion:Die Wurzelfunktion f : R+0 ! R+0 ; x 7! x1=2 hat als Umkehrfunktiondie Quadratfunktion f�1 : R+0 ! R+0 ; x 7! x2. Deren Ableitung ist dieFunktion (f�1)0(x) = 2x. Will man also die Ableitung der Wurzelfunktionbestimmen, muss man na h (9.17) die Ableitung an der Stelle f(x0) = x1=20

112 KAPITEL 9. DIFFERENTIATIONbere hnen. Man erh�alt (f�1)0(x1=20 ) = 2x1=20 . Dieser Ausdru k ist f�ur allex0 6= 0 von Null vers hieden. Damit gilt f�ur x0 > 0:ddxx1=2����x0 = 12x�1=20 (9.18)An der Stelle x0 = 0 vers hwindet die Ableitung der Quadratfunktion,so dass die Division in (9.17) ni ht ausgef�uhrt werden kann. Ans hauli hbedeutet dies: F�ur x = 0 steht die Tangente an f(x) = x1=2 senkre ht.BEISPIEL : Ableitung beliebiger Wurzelfunktionen:Na h Kapitel 3.1.3 ist die Umkehrfunktion der Wurzelfunktion f : R+0 !R+0 ; x 7! f(x) = npx = x1=n die Potenzfunktion f�1(x) = xn. Die Ablei-tung der Potenzfunktion ist na h (9.12) dur h (f�1)0 = nxn�1 gegeben.Mit dem glei hen Argument wie im letzten Beispiel erh�alt man daraus f�urx0 > 0: ddxx 1n ����x0 = 1nx( 1n�1)0 (9.19)Notiz:In der Leibniz's hen Notation kann man si h den Zusammenhang zwis hen derAbleitung der Funktion y = f(x) und der Ableitung ihrer Umkehrfunktionx = f�1(y) besonders lei ht merken:dydx = 1dxdy (9.20)Verglei hen Sie dieses Ergebnis mit Glei hung (9.17)! Allerdings ist aus Glei- hung (9.20) ni ht ersi htli h, an wel hen Stellen die jeweiligen Ableitungen zunehmen sind. In dieser Hinsi ht ist Formel (9.17) vorteilhafter.9.2.3 KettenregelMit den bisherigen Regeln k�onnen wir einfa he Kombinationen von Funktionen, wiedie Summe oder das Produkt zweier Funktionen ableiten. Will man jedo h au hbeliebig komplizierte Funktionen di�erenzieren k�onnen, ben�otigt man eine Regel�uber die Ableitung der Komposition (Kapitel 2.2) zweier Funktionen.Kettenregel:Die Funktion h sei eine Komposition zweier reeller Funktionen f und g,h(x) = (g Æ f)(x) = g(f(x)) : (9.21)Die Funktion f sei an der Stelle x0 di�erenzierbar, und die Funktion g sei ander Stelle y0 = f(x0) di�erenzierbar. Dann ist die Funktion h an der Stelle x0di�erenzierbar und es gilt:dh(x)dx ����x0 = dg(f(x))dx ����x0 = dg(y)dy ����f(x0) � df(x)dx ����x0 (9.22)

9.2. ABLEITUNGSREGELN 113BEMERKUNG: Setzt man in (9.22) y = f(x) und unters heidet explizit zwis heng(y) und g(x) = g(f(x)) = h(x), kann man die Kettenregel kompakt in der sehrsuggestiven Form dgdx ����x0 = dgdy ����f(x0) � dydx ����x0 (9.23)s hreiben.In dieser Form ist Ihnen die Kettenregel eventuell au h als \innere Ableitung mal�au�ere Ableitung" bekannt.Beweis:Mit der De�nition y = f(x) und y0 = f(x0) gilt 1 = [f(x) � f(x0)℄=[y � y0℄, unddamit au h g(f(x)) � g(f(x0))x� x0 = g(y)� g(y0)y � y0 � f(x) � f(x0)x� x0 : (9.24)Ben�utzt man nun die Produktregel f�ur Grenzwerte (8.6), erh�alt manlimx!x0 g(f(x)) � g(f(x0))x� x0 = limx!x0 g(y) � g(y0)y � y0 � limx!x0 f(x) � f(x0)x� x0= limy!y0 g(y)� g(y0)y � y0 � limx!x0 f(x)� f(x0)x� x0 : (9.25)Zur letzten Umformung: Da die Funktion f als an der Stelle x0 di�erenzierbar ange-nommen wurde, ist sie dort na h Kapitel 9.1.2 au h stetig. Damit ist es unerhebli h,ob der erste Grenzwert auf der re hten Seite von (9.25) als Grenzwert x! x0 oderals Grenzwert y ! y0 genommen wird, woraus (9.22) folgt. 2BEISPIEL 1: Ableitung der Funktion h(x) = x3=2.Die Funktion h ist na h (3.3) und (3.7) f�ur x � 0 de�niert.Um ihre Ableitung zu bere hnen, s hreiben wirh(x) = (px)3 d:h: f(x) = px = x1=2 und g(y) = y3 :Die Wurzelfunktion f(x) = x1=2 ist na h Abs hnitt 9.2.2 f�ur alle x > 0di�erenzierbar, die Funktion g(y) = y3 f�ur alle reellen y. Damit ist h(x) f�uralle x > 0 di�erenzierbar. Wendet man die Kettenregel an, erh�alt man f�uralle x > 0: h0(x) = 3(x1=2)2 � 12x�1=2 = 32x1=2 = 32x 32�1.BEISPIEL 2: Ableitung beliebiger Potenzfunktionen:Die Ableitung der Potenzfunktion f : R+0 ! R; x 7! xr kann man f�urrationale r (r = p=q mit p 2 Z und q 2 N) wie im letzten Beispiel be-re hnen. Unter Verwendung von (9.19) erh�alt man (xr)0 = rxr�1. F�urirrationale r ist xr na h Kapitel 3.3 als Grenzwert einer Folge von Funk-tionen fn(x) = x(rn) mit rn 2 Q und limn!1 rn = r de�niert. F�ur jedesGlied dieser Folge von Funktionen ist der Exponent rn eine rationale Zahl.Damit ist die Ableitung jeder dieser Funktionen wohlde�niert und dur h(xrn)0 = rnxrn�1 gegeben. Da die Folge (rn)n2N gerade so gew�ahlt ist,dass f�ur ihren Grenzwert limrn!1 rn = r gilt, folgt f�ur die Ableitung einerPotenzfunktion mit beliebigem reellen Exponenten r: (xr)0 = rxr�1.Notiz (Ableitung von Potenzfunktionen mit reellem Exponenten):Die Ableitung der Potenzfunktion f : R+ ! R; x 7! xr lautet f�ur alle reellenExponenten r 2 R: ddxxr = rxr�1 (9.26)

114 KAPITEL 9. DIFFERENTIATION9.3 Exponential- und Logarithmusfunktion9.3.1 Ableitung der ExponentialfunktionDie Exponentialfunktion wurde in Kapitel 3.4 vorgestellt. In Kapitel 6.1 sahenwir dann, dass ein dur h die lineare Iterierte Abbildung xt+1 = axt bes hriebe-ner Wa hstums- beziehungsweise Zerfallsprozess exponentiell verl�auft, xt = atx0.S hreibt man die Iterierte Abbildung in der Form einer Di�erenzenglei hung (siehedazu au h Glei hung 6.3), erh�alt man xt+1�xt = (a�1)xt. Bei einer exponentiellenFolge ist also die Di�erenz zweier aufeinanderfolgender Folgenglieder xt+1 und xtexakt proportional zu xt.Diese Beoba htung l�asst vermuten, dass au h der Di�erentialquotient der Exponen-tialfunktion x(t) = at an der Stelle t proportional zum Funktionswert an dieserStelle ist ddtat / at. Dies ist in der Tat au h der Fall, wobei die Exponentialfunktionzur Basis e (Eulers he Zahl, e = 2:718282 : : :) unter allen Exponentialfunktionendadur h ausgezei hnet ist, dass die Proportionalit�atskonstante genau Eins ist.Bezei hnen wir die unabh�angige Variable zur Allgemeinheit mit x, gilt also:Notiz (Ableitung der Exponentialfunktion):Die Ableitung der Exponentialfunktion f : R ! R; x 7! ex ist f�ur alle x 2 Ridentis h mit ihr selbst, ddx ex = ex : (9.27)Es gilt sogar: Alle Funktionen, die die Glei hungddxf(x) = f(x) (9.28)erf�ullen, sind (eventuell bis auf eine multiplikative Konstante) mit der Expo-nentialfunktion identis h, f(x) = ex mit 2 R : (9.29)In vielen Anwendnungen treten Exponentialfunktionen auf, bei denen das Argumentni ht x selbst ist, sondern nur proportional zu x, f(x) = e x. Die Ableitung dieserFunktionen ergibt si h mit Hilfe der Kettenregel (9.22) zuddx e x = e x f�ur alle ; x 2 R : (9.30)Die Funktion f(x) = e x erf�ullt nun also die Glei hungddxf(x) = f(x) :Wir wollen au h diesen allgemeineren Fall im Kontext dynamis her Prozesse dis-kutieren. Dazu ersetzen wir die unabh�angige Variable x wie zu Beginn dieses Ab-s hnitts wieder dur h t und die Funktion f(x) dur h x(t). Die damit entstandeneGlei hung ddtx(t) = x(t) (9.31)

9.3. EXPONENTIAL- UND LOGARITHMUSFUNKTION 115bes hreibt einen kontinuierli hen Wa hstumsprozess, in dem die Menge x einer be-liebigen Substanz (radioaktives Pr�aparat, Biomasse ...) proportional zur gerade vor-handenen Menge w�a hst ( positiv) oder abnimmt ( negativ).In dieser Interpretation impliziert der Satz, dass alle (!) denkbaren dynamis henProzesse, in denen si h eine Substanz kontinuierli h und proportional zu ihrer ge-genw�artige Menge ver�andert, dur h exponentielles Wa hstum beziehungsweiseexponentiellen Zerfall gekennzei hnet sind | in glei her Weise, wie wir diesbei in der Zeit diskreten Prozessen s hon in Kapitel 6.1 sahen.3 Siehe dazu au hno hmals Kapitel 3.4.4 { \Mathematik und Biologie: Exponentieller Zerfall"!In der Statistik spielt die glo kenf�ormigeGau�-Funktion eine sehr wi htige Rolle,fGau�(x) = 1p2��2 e� x22�2 : (9.32)Der Parameter � ist ein Ma� f�ur die Breite der \Gau�-Glo ke", der Vorfaktor(2�)�1=2��1 ist so gew�ahlt, dass die Fl�a he zwis hen dem Graph der Funktion undder Abszisse gerade Eins betr�agt.4 F�ur die Ableitung der Gau�-Funktion (9.32)erh�alt man mittels (9.22):ddxfGau�(x) = � x�2p2��2 e� x22�2 = � x�2 fGau�(x) : (9.33)Die Ableitung vers hwindet also f�ur x = 0, x ! �1 und x ! 1, ist positiv f�urnegative x-Werte und negativ f�ur positive x-Werte.
0
1
-4 -3 -2 -1 0 1 2 3 4
y
x
σ2=0.5
σ2=4
σ2=0.16
Abbildung 9.4: Graph der Gau�-Funktion fGau�(x) = 1p2��2 e� x22�2 f�ur drei Werte desParameters �. Je gr�o�er � ist, umso breiter und a her ist die Gau�-Funktion, die Fl�a hezwis hen dem Graph der Funktion und der Abszisse ist aber immer genau Eins.3Glei hung (9.28) ist eine sogenannte Di�erentialglei hung. In diesem Typus von Glei hungist die unbekannte Gr�o�e eine Funktion f(x), ni ht \nur" eine Zahl x wie beispielsweise in derGlei hung ex = 4. Aus der Menge aller denkbaren Funktionen su ht man also na h all denjeni-gen Funktionen, die die Glei hung (9.28) f�ur beliebige x erf�ullen. Wie das Beispiel zeigt, ist dieAntwort ni ht eindeutig | die allgemeine L�osung von (9.28) umfa�t eine ganze L�osungss har,die dur h den Parameter parametrisiert wird. Die Situation ist direkt verglei hbar mit der beiIterierten Abbildungen: dort su ht man na h einer Folge (also au h einer Funktion, nur dass derDe�nitionsberei h die nat�urli hen Zahlen sind), die die Iterierte Abbildung erf�ullt. Die allgemeineL�osung enth�alt au h dort einen freien Parameter, der erst dur h Angabe der Anfangsbedingungfestgelegt wird.4Die Gau�-Funktion spielt eine derart wi htige Rolle in der Mathematik und allen empiris henWissens haften, dass sie auf jedem Zehn-Mark-S hein abgedru kt war: : :

116 KAPITEL 9. DIFFERENTIATIONWie bere hnet man die Ableitung von Exponentialfunktionen zu einer beliebigenBasis a 6= e? Na h Formel (3.34) gilt ax = ex ln(a). Wenden wir nun Glei hung (9.30)an, so folgt: ddx ax = ddx ex ln(a) = ln(a) ex ln(a) = ln(a) ax : (9.34)9.3.2 Potenzreihenentwi klung der ExponentialfunktionK�onnen wir die Exponentialfunktion als eine Potenzreihe (siehe au h Beispiel 6 inAbs hnitt 9.2.1) s hreiben, also auf die Form ex =P1k=0 akxk bringen?Dazu m�ussten na h (9.27) { (9.29) genau zwei Eigens haften erf�ullt sein: erstensmuss die Potenzreihe an der Stelle x = 0 den Wert Eins annehmen, zweitens mussdie Ableitung der Potenzreihe f�ur alle x genau mit ihr identis h sein.Die erste Eigens haft kann dadur h erf�ullt werden, dass man a0 = 1 setzt { allePotenzen xk mit k > 0 vers hwinden ja an der Stelle x = 0.Die zweite Eigens haft erfordert etwas mehr Arbeit: Leiten wir ex = P1k=0 akxkna h x ab, erhalten wir: ex =Pnk=1 k �akxk�1. K�onnen wir aber die Glei hungnXk=0 akxk = nXk=1 k �akxk�1 : (9.35)mit festen KoeÆzienten ak f�ur alle x erf�ullen? Dies ist nur dann m�ogli h, wenndie KoeÆzienten jeder Potenz von x auf der linken und re hten Seite der Glei hung�ubereinstimmen. Betra htet man beispielsweise die l-te Potenz auf beiden Seiten, somuss man also links k = l setzen, re hts k�1 = l. Daraus ergibt si h die Bedingungkak = ak�1 f�ur alle 0 < k � n : (9.36)Falls n endli h ist, gilt zus�atzli h an = 0. Dann muss jedo h wegen kak = ak�1au h an�1, dann mit dem glei hen Argument au h an�2, : : : , a0 vers hwinden, imWiderspru h zur Forderung a0 = 1. Will man also eine L�osung erhalten, muss mandie Reihe zu beliebig hohen n fortsetzen.Dividiert man nun beide Seiten von (9.36) dur h k, erh�alt man eine dur h ak =ak�1=k rekursiv de�nierte Folge. Mit a0 = 1 ist das k-te Glied dann gerade dur hak = 1=k! gegeben. Damit haben wir die erw�uns hte Potenzreihendarstellung derExponentialfunktion gefunden: ex = 1Xk=0 xkk! : (9.37)Zur Probe di�erenziere man die re hte Seite der Glei hung na h x und �uberzeugesi h, dass die Ableitung der Potenzreihe mit der Potenzreihe selbst genau �uberein-stimmt!Damit haben wir an einem Beispiel gesehen, wie man eine bekannte Funktion voll-kommen neu als eine Potenzreihe darstellen kann. In den n�a hsten Kapiteln werdenwir die Potenzreihendarstellungen der Sinus- und Cosinusfunktion herleiten unddann au h erkennen, dass ein �uberras hender und enger Bezug zwis hen diesendrei wi htigen Funktionstypen besteht. Potenzreihen bieten dar�uber hinaus oft dieM�ogli hkeit, Funktionen zu analysieren, f�ur die keine kompakten Bes hreibungenwie f(x) = ex existieren. Sie sind deshalb von gro�er Bedeutung in der Mathematikund den Natur- und Ingenieurwissens haften.

9.4. H �OHERE ABLEITUNGEN 1179.3.3 Ableitung der LogarithmusfunktionDer nat�urli he Logarithmus ist die Umkehrfunktion der Exponentialfunktion. Set-zen wir in Formel (9.17) also f(x) = ln(x) und f�1(x) = ex, erhalten wir:ddx ln(x)����x0 = 1eln(x0) = 1x0 :Notiz (Ableitung der Logarithmusfunktion):ddx ln(x) = 1x f�ur alle x > 0 (9.38)Mit Hilfe von Glei hung (3.38) ergibt si h daraus die Ableitung des Logarithmuszur Basis a zuddx loga(x) = ddx � 1ln(a) ln(x)� = 1ln(a) ddx ln(x) = 1ln(a) x : (9.39)BEISPIEL : Ausbli k: Ableitung der Funktion f(x) = xx:Da xx = ex lnx, folgt aus der Kettenregel, Produktregel und Glei hung(9.39): ddxxx = (1 + lnx)xx.9.4 H�ohere AbleitungenIn Kapitel 9.1 wurde darauf hingewiesen, dass man aus einer di�erenzierbaren Funk-tion f eine neue Funktion f 0 erzeugen kann, indem man jedem x den Wert der Ab-leitung an dieser Stelle zuordnet. Diese Funktion wurde Ableitung von f genannt.Mit Hilfe der Di�erentiation kann also aus der urspr�ungli hen Funktion f eine neueFunktion f 0 erzeugt werden. Diese kann ebenfalls auf Di�erenzierbarkeit untersu htwerden: Falls au h die Funktion f 0 di�erenzierbar ist, kann die zweite Ableitungvon f gebildet werden, f�ur die man au h(f 0)0 = f 00 = d2dx2 f (9.40)s hreibt. Falls diese Funktion wiederum di�erenzierbar ist, kann die dritte Ablei-tung f 000 gebildet werden et . Diese Ableitungen werden au h als dnfdxn oder dndxnfges hrieben und f�ur n > 1 h�ohere Ableitungen genannt.BEISPIELE: ddxx2 = 2x ; d2dx2 x2 = 2 ; dndxn x2 = 0 f�ur n > 2 :dndxn exp(ax) = an exp(ax) f�ur alle n 2 N :

118 KAPITEL 9. DIFFERENTIATION9.5 Taylor-Entwi klungWie in Kapitel 9.1.1 bes hrieben, ist die Tangente an eine di�erenzierbare Funktionan der Stelle x0 dur h die lineare Glei hungy(x) = f(x0) + f 0(x0) � (x � x0) (9.41)gegeben. In linearer N�aherung stellt (9.41) also die beste Bes hreibung von f nahex0 dar: y(x0) = f(x0) und y0(x0) = f 0(x0) (9.42)Will man jedo h die Funktion f in der N�ahe der Stelle x0 no h genauer als alleindur h ihre Tangentenglei hung harakterisieren, kann man si h die Frage stellen,wel he quadratis he Funktion man auf der re hten Seite von (9.41) addieren sollte,so dass au h die zweite Ableitung von f ri htig wiedergegeben wird. Da weiterhiny(x0) = f(x0) gelten soll, addieren wir eine Parabelfunktion mit S heitel an derStelle x = x0, ma hen also den Ansatzy(x) = f(x0) + f 0(x0) � (x� x0) + � (x � x0)2 (9.43)und versu hen, den Parameter so zu bestimmen, dass zus�atzli h zu (9.42) au hgilt: y00(x0) = f 00(x0) : (9.44)Setzt man diese Forderung in (9.43) ein, erh�alt man2 = f 00(x0) ; (9.45)so dass y(x) = f(x0) + f 0(x0)(x� x0) + 12f 00(x0)(x � x0)2 : (9.46)Glei hung (9.46) stellt damit die beste N�aherung von f im Punkt x0 dur h einequadratis he Funktion dar.Erweitert man dieses Verfahren auf kubis he und h�ohere Terme in (x� x0), erh�altman | immer unter der Voraussetzung, dass die entspre henden Ableitungen exi-stieren | als N�aherung in m-ter Ordnung:y(x) = f(x0) + mXk=1 (x � x0)kk! dkdxk f(x)����x0 : (9.47)Die re hte Seite von (9.47) stellt eine endli he Reihe von Potenzfunktionen dar, oderanders ausgedr�u kt: die Teilsumme einer Folge, deren n-tes Glied dur h (x�x0)kk! dkfdxk ���x0gegeben ist. Siehe au h Beispiel 6 in Abs hnitt 9.2!Die Konvergenz von y(x) gegen f(x) f�ur m ! 1 wird dur h den folgenden undsehr wi htigen Satz von Taylor [1685-1731℄ si hergestellt:

9.5. TAYLOR-ENTWICKLUNG 119Satz von Taylor:Wenn die Funktion f : R ! R; x 7! f(x) auf dem Interval [a; b℄ Ableitungenjeder Ordnung besitzt und es Konstanten � und C gibt, so dass���� dkfdxk (x)���� � �Ck f�ur alle x 2 [a; b℄ und alle k 2 N ist; (9.48)dann gilt f�ur x0 2 [a; b℄:f(x) = f(x0) + 1Xk=1 (x� x0)kk! dkfdxk (x0) : (9.49)Die Bedeutung dieses Satzes kann ni ht gen�ugend betont werden:Die Taylor-Entwi klung (9.49) erlaubt es, eine gegebene Funktion f an jeder be-liebigen Stelle x mit jeder gew�uns hten Genauigkeit zu bere hnen | und zwar alleinmit Hilfe der Funktions- und Ableitungswerte an einer einzigen Stelle! Eine ents hei-dende Voraussetzung muss f jedo h erf�ullen: die Funktion muss Ableitungen jederOrdnung besitzen. Diese Forderung ist f�ur viele wi htige Funktionen (Polynome,Exponentialfunktion, Logarithmus, Sinus- und Cosinusfunktion ...) gegeben.BEMERKUNG: Die Bedingung (9.48) im Satz von Taylor garantiert die Konver-genz der Potenzzreihe (9.47) f�ur m ! 1. Ist diese Bedingung ni ht erf�ullt, istni ht si hergestellt, ob die Potenzreihe zu f(x) konvergiert oder ob sie �uberhauptkonvergiert.BEISPIEL 1: Quadratfunktion:F�ur die Quadratfunktion f(x) = x2 gilt: f 0(x0) = 2x0, f 00(x0) = 2, alleh�oheren Ableitungen vers hwinden. Damit gilt: f(x) = x20 + 2 � x0 � (x �x0) + 1=2 � 2 � (x � x0)2 = ::: = x2. Die Taylor-Entwi klung der Qua-dratfunktion ist also identis h mit der Ausgangsfunktion. Dieses Ergebnismuss au h allgemein auf alle endli hen Polynome zutre�en, da die Taylor-Entwi klung jeder Funktion mit nur endli h vielen von Null abwei hendenAbleitungen eine endli he Reihe von Potenzfunktionen zuordnet. Da alleAbleitungen na h De�nition an der Stelle x0 �ubereinstimmen, m�ussen au hdie KoeÆzienten in der Potenzreihe �ubereinstimmen, so dass man wiederdas Ausgangspolynom erh�alt. Interessanter ist das n�a hste Beispiel:BEISPIEL 2: Exponentialfunktion:Wir wissen s hon, dass dkdxk ex = ex. W�ahlen wir nun speziell x0 = 0, so giltdkfdxk (0) = 1 und aus (9.49) folgt dann:exp(x) = 1Xk=0 xkk! : (9.50)Die Taylorreihe der Exponentialfunktion stimmt also genau mit der Potenz-reihe (9.37) �uberein! Siehe au h Abbildung 9.5.BEISPIEL 3: Logarithmusfunktion:f(x) = ln(x). Hier gilt f�ur x0 > 0: f 0(x0) = x�10 , f 00(x0) = �x�20 ,f 000(x0) = 2x�30 , und allgemein: dkfdxk (x0) = (�1)k+1 (k�1)!xk . Entwi kelt man

120 KAPITEL 9. DIFFERENTIATION
0
1
2
3
-3 -2 -1 0 1 2 3
y
x
ex
1
1+x
1+x+0.5*x2
Abbildung 9.5: Exponentialfunktion f(x) = ex und N�aherungen mit Hilfe der Taylor-Entwi klung.den Logarithmus um x0 = 1, kann man weiterhin zeigen, dass die Reihe f�ur0 < x � 2 konvergiert, und dass gilt:ln(x) = 1Xk=1(�1)k+1 (x� 1)kk f�ur 0 < x � 2 : (9.51)Wenn wir jetzt in (9.51) no h die Variablensubstitution y = x� 1 vorneh-men, erhalten wir die sogenannte Logarithmusreihe:ln(1+y) = y� y22 + y33 � y44 +: : : = 1Xk=1(�1)k+1 ykk f�ur �1 < y � 1 :(9.52)F�ur y = 1 ergibt si h aus (9.52) die s h�one Summenformelln(2) = 1� 12 + 13 � 14 + : : : : (9.53)Die re ht Seite von (9.53) kennen wir bereits als die alternierende harmo-nis he Reihe!BEMERKUNG: Glei hung (9.51) gilt nur f�ur 0 < x � 2. Will man denLogarithmus f�ur x > 2 in eine Taylorreihe entwi keln, so su he man eineZahl a 2 R, deren Logarithmus bekannt ist und f�ur die x=a 2 (0; 2℄ gilt.Dann ben�utze man die Identit�at ln(x) = ln(a)+ ln(x=a) und wende (9.51)auf x=a an. Da die endli he Reihe (9.47) am s hnellsten konvergiert, wennihr Argument m�ogli hst nahe an x0 liegt | hier x0 = 1 | w�ahle man aam besten so, dass jx� 1j m�ogli hst klein ist.

9.6. KURVENDISKUSSION 1219.6 KurvendiskussionMit den jetzt bekannten Methoden k�onnen Sie das Verhalten einer beliebigen reel-len Funktion im Detail untersu hen. Damit k�onnen Sie ni ht nur den Verlauf vonPolynomen und speziellen Funktionen wie f(x) = ln(x) verstehen, sondern au hzusammengesetzte Funktionen wie f(x) = exp[x2 + ln(x)℄. Selbst ohne Computerwerden Sie dabei wesentli he Eigens haften der betra hteten Funktion aufs hl�usselnk�onnen. Gegen�uber re hnergest�utzten Verfahren haben Sie den zus�atzli hen Vor-teil, Auswirkungen von Parameterver�anderungen auf den Funktionsverlauf sofortvoraussagen zu k�onnen.Bei der Kurvendiskussion emp�ehlt si h das folgende s hrittweise S hema. Dabeisollten Sie Ihre Ergebnisse glei h in eine erste Skizze eintragen, um si h so S hritt f�urS hritt ein immer genaueres \Bild" vom Graph der betra hteten Funktion ma henzu k�onnen.1. De�nitionsberei h, Singularit�aten und (verste kte) SymmetrienF�ur wel he Argumente x ist f(x) �uberhaupt de�niert? Gibt es Stellen, an denen fsingul�ar ist? We hselt die Funktion an diesen Stellen ihr Vorzei hen?Ist die Funktion periodis h oder weist sie Symmetrieeigens haften auf? Ist f insbe-sondere gerade oder ungerade (siehe au h Kapitel 2.2)? Falls nein: gibt es viellei hteine Variablentransformation ~x = x�a, so dass die Funktion in der neuen Variablen~x gerade oder ungerade ist?2. NullstellenF�ur wel he Argumente x ist der Funktionswert glei h Null? Die Antwort auf dieseFrage erfordert die L�osung der Glei hung f(x) = 0. F�ur lineare und quadratis heFunktionen kann diese Glei hung gel�ost werden (siehe au h Kapitel 2.3). In vielenF�allen (z.B. Polynome h�oheren Grades) kann die Frage na h der exakten Lage vonNullstellen jedo h nur n�aherungsweise beantwortet werden.3. Asymptotis hes Verhalten(A) Falls si h das De�nitionsgebiet f�ur positive und/oder negative x bis unendli herstre kt: K�onnen Sie qualitativ abs h�atzen, wie si h die Funktion asymptotis hverh�alt? Wel he Werte erhalten Sie f�ur limx!1 f(x) beziehungsweise limx!�1 f(x)?(B) Falls das De�nitionsgebiet na h unten und/oder oben bes hr�ankt ist: Wieverh�alt si h die Funktion an den R�andern?4. StetigkeitGibt es Argumente x, an denen f(x) springt? Wenn ja: Um wel hen Betrag und inwel her Ri htung?

122 KAPITEL 9. DIFFERENTIATION5. Di�erenzierbarkeitF�ur wel he x ist f di�erenzierbar? Wie lautet die erste Ableitung? F�ur wel he xexistiert au h die zweite Ableitung? Wie lautet sie?6. MonotonieF�ur wel he Teilintervalle des De�nitionsberei hs ist die Funktion monoton wa h-send, f�ur wel he monoton fallend? Wo gilt strenge Monotonie?(A) Falls die Funktion auf dem ganzen De�nitionsberei h di�erenzierbar ist, k�onnendiese Fragen mit Hilfe der ersten Ableitung untersu ht werden. Es gilt:f 0(x) > 0) f w�a hst streng monoton.f 0(x) < 0) f f�allt streng monoton.(B) An Stellen, an denen f ni ht di�erenzierbar ist, greife man auf die De�nitionder Monotonie in Kapitel 2.1 zur�u k.7. Lokale ExtremaWo liegen lokale Extremwerte der Funktion?(A) Falls die erste und die zweite Ableitung der Funktion auf dem gesamten De�-nitionsberei h existieren, k�onnen Sie wie folgt vorgehen:Bestimmen Sie zuerst die Nullstellen der ersten Ableitung. Aus dem Vorzei hen derzweiten Ableitung an diesen Stellen ist dann ersi htli h, ob es si h um ein Maximumoder Minimum handelt:f 00(x0) > 0) f hat ein Minimum an der Stelle x0.f 00(x0) < 0) f hat ein Maximum an der Stelle x0.Wel hen Wert nimmt die Funktion an den lokalen Extrema an? Tragen Sie diesePunkte in Ihre Skizze ein!Hat die Funktion f ein lokales Extremum an der Stelle x0, muss die Tangentean den Graph von f im Punkt (x0; (f(x0)) parallel zur Abszisse verlaufen. Diesewaagere hten Tangenten k�onnen lei ht gezei hnet werden | und sind sehr hilfrei hf�ur die weitere Untersu hung.(B) An Stellen, an denen die erste und/oder zweite Ableitung der Funktion f (wie imFall der Betragsfunktion) ni ht existiert, �uberlege man si h explizit, ob ein Minimumoder Maximum vorliegt.8. Absolute ExtremaWel hes ist das gr�o�te Maximum und das kleinste Minimum? Falls der De�nitions-berei h ein Intervall ist, betra hte man au h explizit das Verhalten der Funktionan den R�andern des Intervalls. Auf Ableitungen der Funktion beruhende Metho-den greifen an diesen Stellen ni ht, wie das Beispiel f : [0; 1℄ ! R; x 7! x zeigt.

9.6. KURVENDISKUSSION 123Die zweite Ableitung dieser Funktion ist identis h Null, und trotzdem existiert einMaximum und ein Minimum (siehe au h Kapitel 8.2.1).9. Kr�ummungsverhaltenWenn f 00(x0) > 0 ist, so bedeutet dies, dass die erste Ableitung an der Stelle x0w�a hst, der Graph der Funktion also steiler wird: die Kurve kr�ummt si h bei x0na h oben (f ist konvex). Umgekehrt impliziert f 00(x0) < 0 eine Kr�ummung ander Stelle x0 na h unten (f ist konkav). Falls f 00(x0) vers hwindet und f 000(x0) 6= 0liegt ein Wendepunkt vor.10. Graphis he DarstellungNa hdem Sie die obige Liste dur hgegangen sind und Ihre Ergebnisse in einer erstenSkizze dargestellt haben, sollten Sie eine genauere Darstellung anfertigen. Dabeikann es von Fall zu Fall vorteilhaft sein, die Funktion an einigen Stellen exakt zubere hnen, wobei Ihnen hier ein Tas henre hner helfen wird. Insbesondere wenn Sieunter Zeitdru k arbeiten, sollten diese St�utzpunkte mit Beda ht gew�ahlt werden.Es emp�ehlt si h, Funktionswerte vor allem dort explizit zu bere hnen, wo Sie einegro�e Kr�ummung erwarten, oder in Abs hnitten, wo die Funktion und ihre erstenbeiden Ableitungen das Vorzei hen ni ht we hseln, so dass die obigen qualitativenMethoden ni ht greifen.Weitere M�ogli hkeitenFalls Sie am detaillierten Verlauf des Graphen an bestimmten Stellen x0 beson-deres Interesse haben, k�onnen Sie dort eine Taylor-Entwi klung dur hf�uhren undverf�ugen damit au h �uber die entspre hende Tangentenglei hung, beziehungsweise�uber Glei hungen f�ur si h an die Funktion ans hmiegende Polynome endli her Ord-nung. Diese sind unter Umst�anden lei ht zu zei hnen und geben Ihnen in der N�ahevon x0 sehr gute Information �uber das Verhalten der Ausgangsfunktion.Regel von de l'HospitalGelegentli h kommt es vor, dass man den Wert einer Funktion f(x) der Formf(x) = g(x)=h(x) an einer Stelle x0 bestimmen soll, an der sowohl g als au h hvers hwinden. Hier hilft folgender �uberras hend einfa her Satz weiter:Satz (Regel von de l'Hospital):Die Funktionen g und h seien auf dem Intervall M 2 R di�erenzierbar, x0 2Mund h0(x0) 6= 0. Falls g(x0) = h(x0) = 0, dann giltlimx!x0 g(x)h(x) = limx!x0 g0(x)h0(x) : (9.54)

124 KAPITEL 9. DIFFERENTIATIONBeweis:Unter den Voraussetzungen des Satzes giltlimx!x0 g(x)h(x) = limx!x0 g(x)� 0h(x)� 0 = limx!x0 g(x)� g(x0)h(x)� h(x0) = limx!x0 g(x)�g(x0)x�x0h(x)�h(x0)x�x0 = g0(x0)h0(x0) :(9.55)Hierbei wurde bei der letzten Umformung Glei hung (8.7) verwendet. Um dies zuerm�ogli hen mu�te im obigen Satz h0(x0) 6= 0 gefordert werden.9.6.1 Ein Beispiel zur Kurvendiskussion: f(x) = (1+x)p1� x2De�nitionsberei h, singul�are Stellen und Symmetrien: Die Funktion ist f�urjxj � 1 de�niert und weder gerade no h ungerade. F�ur jxj � 1 gilt 0 � (1 + x) � 2und 0 � p1� x2 � 1, so dass f bes hr�ankt ist.Nullstellen: Die Nullstellen sind x1 = �1 und x2 = +1; zwis hen ihnen gilt f > 0.Asymptotis hes Verhalten: S hon bekannt | siehe \Nullstellen"!Stetigkeit: Die Funktion h(x) = p1� x2 ist im De�nitionsberei h stetig. Als Pro-dukt von h(x) und der stetigen Funktion g(x) = 1 + x ist au h f stetig.Di�erenzierbarkeit: F�ur jxj < 1 lauten die ersten beiden Ableitungen von f :f 0(x) = �2x2 � x+ 1p1� x2 und f 00(x) = 2x3 � 3x� 1(1� x2)p1� x2 :Monotonie: Die Nullstellen von f 0 erh�alt man, indem man diejenigen Nullstellenvon �2x2 � x+ 1 bestimmt, die in (�1; 1) liegen. Als einzige Nullstelle �ndet manx3 = 1=2. Im Interval (�1; 1=2) ist f 0 positiv, also w�a hst f hier streng, w�ahrendim Intervall (1=2; 1) f 0 negativ ist, f also streng fallend ist.Extrema: x3 = 1=2 ist der einzige Extremwert in (�1; 1). Es ist ein Maximum undder zugeh�orige Funktionswert ist f(1=2) = 3p3=4.Kr�ummungsverhalten: Zur Bestimmung der Nullstellen von f 00 l�ose man dieGlei hung 2x3 � 3x � 1 = 0. Eine ihrer L�osungen, n�amli h �1 �ndet man dur hRaten. F�ur die beiden anderen L�osungen hilft folgende Beoba htung:Notiz (Division von Polynomen):Kennt man eine Nullstelle x0 eines Polynoms p(x) vom Grad n, kann man dasPolynom als p(x) = (x�x0) � q(x) s hreiben, wobei q(x) ein Polynom vom Gradn�1 ist. Das Polynom q(x) bestimmt man dadur h, dass man p(x) dur h x�x0genauso dividiert, wie man dies f�ur reelle Zahlen tut.In unserem speziellen Fall erhalten wir (2x3 � 3x� 1)=(x+ 1) = 2x2 � 2x� 1. Diebeiden anderen L�osungen sind daher dur h (1 +p3)=2 und (1�p3)=2 gegeben.Von den drei gefundenen Nullstellen liegt nur x4 = (1�p3)=2 � �0:37 in (�1; 1),also ist x4 die einzige Nullstelle von f 00. Im Intervall (�1; x4) ist f 00 positiv, f alsokonvex, im Intervall (x4; 1) ist f 00 negativ, f also konkav. x4 = (1�p3)=2 ist damitder einzige Wendepunkt in (�1; 1). N�aherungsweise gilt f(x4) = 0:59.

9.7. AUFGABEN 125Weitere Details: Mit den obigen Betra htungen ist der eigentli he \Fragenkata-log" abgearbeitet. Das exakte Verhalten von f in der N�ahe von �1 und 1 ist aberno h ni ht gekl�art | wie l�auft f(x) f�ur x! �1 und x! 1 gegen null?Um diese Frage zu beantworten, betra hten wir die Ableitung f 0 an diesen beidenStellen. F�ur x! 1 konvergiert der Nenner von f 0(x) gegen 0, der Z�ahler gegen �2.Damit divergiert f 0 | die Funktion hat f�ur x = 1 eine senkre hte Tangente.An der Stelle x = �1 konvergieren dagegen sowohl Z�ahler als au h Nenner gegen0, so dass wir zuerst einmal ni ht wissen, ob au h f 0 selbst konvergiert. An dieserStelle hilft jedo h die Regel von de l'Hospital (9.54) weiter. Die Voraussetzungendieser Regel tre�en ja an der Stelle x0 = �1 auf Z�ahler und Nenner der Ableitungf 0(x) zu. Wir setzen also g(x) = �2x2 � x + 1 und h(x) = p1� x2 und erhaltendamit f�ur den re htsseitigen Grenzwert limx!�1+ f 0(x) = 0.Bea hten wir no h, dass f(0) = 1, erhalten wir n�aherungsweise den dargestelltenGraph. Bea hten Sie, dass aus der Abbildung selbst das exakte Verhalten bei �1ni ht ersi htli h ist, und dass das Zei henprogramm bei +1 \ausstieg". So zeigtselbst dieses einfa he Beispiel deutli h die Grenzen rein numeris her Verfahren.
0
0.5
1
1.5
2
-1 -0.5 0 0.5 1
y
xAbbildung 9.6: Computergenerierter Graph der Funktion f(x) = (1 + x)p1� x2.9.7 Aufgaben1. (Ableitung) Bestimmen Sie die maximalen De�nitionsgebiete M der folgendenFunktionen und bere hnen Sie die Ableitungen f�ur alle x 2 M . Hinweis: f�ur dieAbleitung der Exponentialfunktion gilt ddxex = ex.

126 KAPITEL 9. DIFFERENTIATION(a) f(x) = x2 � 7x5(b) f(x) = 2x3=2 + ax�4( ) f(x) = 12x2 + 23x3 � 4x(d) f(x) = exx� b(e) f(x) =px2 + 1(f) f(x) = (1� x4)�5(g) f(x) = e�3x2(h) f(x) = eex(i) f(x) =px2 + 1� x(j) f(x) = ek(x�x0) + 4px(k) f(x) = x2 � e�3x(l) f(x) = (7x2 � 4)6px2 + 12. (verk�urzte Diskussion) Gegeben sind die beiden Funktionen:f(x) = x3 � 9x und g(x) = x4 � 5x2 + 4(a) Wie verhalten si h die Funktionen f�ur sehr gro�e und sehr kleine Werte von x?(b) Bere hnen Sie die Nullstellen!( ) Wel he Symmetrien besitzen die Funktionen?(d) Bere hnen Sie die 1., 2., 3. und 4. Ableitung von f(x) und g(x) !(e) Skizzieren sie die beiden Funktionen!3. (Ableitung von Polynomen) Gegeben ist folgendes Polynom 4. Grades:p(x) = 4Xk=0 1k + 1xk(a) S hreiben Sie die Summe aus!(b) Wie lauten die lineare und die quadratis he N�aherung von p(x) ?( ) Wie verh�alt si h p(x) f�ur sehr kleine und sehr gro�e Werte von x ?(d) Bere hnen Sie die Ableitung p0(x) = dp(x)=dx des Polynoms!(e) Wie verh�alt si h die Ableitung p0(x) f�ur sehr kleine und sehr gro�e Werte vonx ?(f) Die Ableitung p0(x) ist wiederum ein Polynom. Wel hen Grad hat es?4. (Ableitung) Bestimmen Sie die maximalen De�nitionsgebiete M der folgendenFunktionen und bere hnen Sie die Ableitungen f�ur alle x 2M .(a) f(x) = xe�x2(b) f(x) = (x � 1)e�(x�1)2( ) f(x) = 11 + e�x(d) f(x) = ln(x)(e) f(x) = log10(x)(f) f(x) = x log2(x)(g) f(x) = xx(h) f(x) = ax2 + bx+ (i) f(x) = nXk=0 akxk ; ak 2 R5. (Ableitung der Umkehrfunktion) Wir betra hten die Funktion f(x) = ln(x+1).

9.7. AUFGABEN 127(a) Wie geht f(x) aus der Funktion g(x) = ln(x) hervor?(b) Wel hen De�nitions- und wel hen Werteberei h hat f(x) ?( ) F�ur wel he x ist f umkehrbar? Bere hnen Sie die Umkehrfunktion f�1 von f !(d) Skizzieren sie die Graphen von f(x) und f�1(x) !(e) Bere hnen Sie zuerst die Ableitung von f�1 und dann damit die Ableitung vonf(x) !6. (Taylorentwi klung) Gegeben seien die Funktionen Cosinus hyperboli us undSinus hyperboli us:f(x) = osh(x) = ex + e�x2 und g(x) = sinh(x) = ex � e�x2(a) Bere hnen Sie die ersten vier Ableitungen der beiden Funktionen und versu- hen Sie diese jeweils dur h osh(x) oder sinh(x) auszudr�u ken! Geben Sie einekompakte Form der n-ten Ableitung f (n) bzw. g(n) an!(b) Stellen Sie die Taylorreihen von osh(x) und sinh(x) f�ur x0 = 0 auf!( ) Wie lauten die quadratis hen N�aherungen von osh(x) und sinh(x) an der Stellex = 0? Skizzieren Sie die Graphen der N�aherungen zusammen mit denen derurspr�ungli hen Funktionen f und g !(d) Wie h�angen diese mit der Taylorreihe der Exponentialfunktion zusammen?Bere hnen Sie dazu osh(x)+sinh(x) direkt und als Summe der entspre hendenTaylorreihen!7. (Gau�-Funktion) Die Gau�-Funktion ist de�niert alsfGau� = 1p2��2 e� x22�2(a) Bere hnen Sie die erste und die zweite Ableitung der Gau�-Funktion f 0Gau� undf 00Gau�!(b) Wie verhalten si h fGau�, f 0Gau� und f 00Gau� f�ur sehr gro�e und sehr kleine Wertevon x ?( ) Versu hen Sie fGau�(�x), f 0Gau�(�x) und f 00Gau�(�x) jeweils dur h fGau�(x),f 0Gau�(x) und f 00Gau�(x) auszudr�u ken. Was sagt das Ergebnis �uber die Symme-trieeigens haften der drei Funktionen aus?(d) Bere hnen Sie die Nullstellen der Gau�-Funktion und ihren beiden Ableitungen!Was bedeutet die Nullstelle von f 0Gau� f�ur fGau�? Was bedeuten die Nullstellenvon f 00Gau� f�ur f 0Gau�? Was bedeuten die Nullstellen von f 00Gau� f�ur fGau�? Wasbes hreibt also der Parameter � ?(e) Bere hnen Sie die Funktionswerte an der Stelle x = 0 !(f) Skizzieren Sie die Graphen der drei Funktionen fGau�, f 0Gau� und f 00Gau�! Ber�u k-si htigen Sie dabei die Ergebnisse aus (b){(e), und dass die Funktionen dur hAbleiten auseinander hervorgehen.8. (Fortsetzung von Funktionen) Die Funktion f sei f�ur x < 0 dur h g(x) = exgegeben. Sie soll dur h die Funktion h(x) = a+ bx f�ur x � 0 fortgesetzt werden.f(x) = � g(x) = ex ; x < 0h(x) = a+ bx ; x � 0

128 KAPITEL 9. DIFFERENTIATION(a) Wie m�ussen a und b gew�ahlt werden, so dass g(0) = h(0) und g0(0) = h0(0) ?(b) Skizzieren Sie den Graphen der Funktion f(x) !( ) Bere hnen Sie allgemein au h g00(x) und h00(x). Was gilt f�ur die zweite Ablei-tung der Funktion f an der Stelle x = 0 ?(d) Es sei nun h(x) = 1Pk=0 akxk . Bestimmen Sie die Parameter ak so, da� alleAbleitungen von g(x) und h(x) an der Stelle x = 0 �ubereinstimmen. Wie lautetdann die Funktion f(x) ?9. (Beispiel aus der Neurobiologie) In der Netzhaut von Wirbeltieren be�ndet si hdirekt unter den Photorezeptoren ein Netzwerk von sogenannten Horizontalzellen.Wird die Retina mit einem Li htspalt der Breite 2d am Ort x = 0 beleu htet, ergibtein einfa hes Modell folgenden Verlauf der Membranspannung V (x) der Horizon-talzellen am Ort in x re htwinklig zum Spalt:V (x) = ( 1 exp�� jxj� �+E0 ; jxj > d 2 osh �x��+E1 ; jxj � dDarin ist E0 das Ruhepotential der Zellen im Dunkeln, E1 ist die Membranspan-nung, die si h einstellt, wenn die ganze Retina beleu htet wird, und � ist die L�angs-konstante, die bes hreibt, wie weit si h eine �Anderung der Membranspannung indem Horizontalzellennetzwerk ausbreitet. 1 und 2 sind zwei beliebige Konstanten.(a) Wel he Membranspannung hers ht in den Zellen, die weit vom Spalt entferntsind?(b) Wel he Symmetrie hat die Funktion f ?( ) Bestimmen Sie die beiden Konstanten 1 und 2 so, da� f und f 0 stetig an denStellen x = d und x = �d ist!(d) Skizzieren Sie den Graph der Funktion f(x) !10. (Taylorentwi klung, Kurvendiskussion) Wir wollen beweisen, dass f�ur jxj �1 die Abs h�atzung p1� x2 � 1 � 12x2 gilt. Diese Abs h�atzung ist von zentralerBedeutung f�ur die Diskussion von Sinus und Cosinus (siehe Kapitel 10.2.1).(a) Entwi keln Sie dazu die Funktion f(x) = p1� x2 in eine Taylorreihe na h xum x0 = 0 und bre hen Sie die Entwi klung na h dem quadratis hen Term ab.(b) F�uhren Sie au h eine Kurvendiskussion der Funktion f(x) und g(x) = 1� 12x2dur h, um ein besseres Verst�andnis f�ur beide Funktionen und damit au h f�urdie Grenzen der obigen Abs h�atzung zu erhalten. (De�nitionsberei h, Verhaltenan den R�andern, Nullstellen, Funktionswert an der Stelle x = 0, Symmetrie,Extrema, Skizze).11. (Taylorreihe) Bere hnen Sie die ersten vier Ableitungen der Exponentialfunk-tion zur Basis a 2 R+, f(x) = ax, und geben Sie dann eine kompakte Formelf�ur die n-te Ableitung an. Benutzen Sie dieses Ergebnis um die Taylorreihe von axaufzustellen! Wie h�angt diese Reihe mit der Taylorreihe von ex zusammen?12. (Kurvendiskussion) Diskutieren Sie die Funktion g(x) = os(ax2) mit x 2 Rund a 2 R+.

9.7. AUFGABEN 129(a) Wie lautet die erste und zweite Ableitung von g?(b) Wel hen Wert haben g(0), g0(0) und g00(0)?( ) Wie lautet die Taylor-Entwi klung von g um x0 = 0 bis eins hlie�li h des in xquadratis hen Terms?(d) Wie lautet die Tangentenglei hung an g im Punkt x0 = 0?(e) Ist g gerade beziehungsweise ungerade?(f) Hat g Nullstellen? Wenn ja, wo liegen diese?(g) Wo liegen die Maxima und Minima von g?(h) Skizzieren Sie grob den Graph der Funktion g.(Dies war eine Aufgabe in der 2. Klausur vom WS98/99!)

130 KAPITEL 9. DIFFERENTIATION

Kapitel 10Trigonometris he FunktionenDie Funktionen Sinus, Cosinus und die davon abgeleiteten Funktionen Tangens undCotangens werden zusammen mit ihren Umkehrfunktionen als trigonometris heFunktionen bezei hnet. Die trigonometris hen Funktionen sind neben den Potenz-,Exponential- und Logarithmusfunktionen die wi htigsten speziellen Funktionen inder Mathematik und den Naturwissens haften. Dies kommt zum einen daher, dasssie in der Geometrie, und dabei vor allem in der Trigonometrie (\Dreie ksmes-sung"), eine zentrale Rolle spielen, zum anderen daher, dass die einfa hsten undzuglei h wi htigsten S hwingungstypen in biologis hen, hemis hen oder au h phy-sikalis hen Systemen dur h sinusf�ormige Zeitverl�aufe harakterisiert sind. In Kapitel14 (Lineare Di�erentialglei hungen) werden wir zeigen, dass si h ein sinusf�ormigerZeitverlauf immer dann ergibt, wenn die R�u kstellkr�afte in einem s hwingungsf�ahi-gen System proportional zur Gr�o�e der Auslenkung aus der Ruhelage sind. In derPhysik haben Sie dieses Ph�anomen unter den Begri�en \Hookes hes Federpendel"oder \harmonis her Oszillator" kennengelernt.10.1 Winkelmessung und ebene Dreie keBevor wir im Detail auf die trigonometris hen Funktionen eingehen, wollen wir diewi htigsten Eigens haften ebener Dreie ke wiederholen.1 Hierbei sto�en wir sofortauf das Konzept \Winkel zwis hen zwei Geraden" und damit au h auf die Frage,wie man die Gr�o�e eines Winkels messen soll.Im allt�agli hen Leben werden Winkel im Gradma� gemessen | ein re hter Winkelentspri ht 90Æ, ein Vollwinkel 360Æ. Warum aber sollte ein re hter Winkel gerade 90Æentspre hen, warum ni ht 100Æ, 42Æ oder 117:18Æ? A priori gibt es keinen Grund,die Zahlen 90 beziehungsweise 360 in irgendeiner Weise auszuzei hnen. Dagegenexistiert sehr wohl eine ausgezei hnete nat�urli he Einheit f�ur die Winkelmessung:Betra htet man n�amli h einen Kreis mit Radius r, so ist sein Umfang U dur h dieFormel U = 2�r gegeben. Weiterhin ist die L�ange x eines Kreisbogens proportional1In der Umgangsspra he und im weiteren Text werden wir unter dem Begri� \Dreie k" immerein ebenes Dreie k verstehen, also eine dur h drei si h paarweise s hneidende Geraden begrenzteTeilmenge einer Ebene. Davon zu unters heiden sind sph�aris he Dreie ke, dur h drei Gro�kreisebegrenzte Teilmengen einer Kugelober �a he. Anmerkung: F�ur sph�aris he Dreie ke tre�en die S�atzedieses Abs hnitts ni ht zu. Ma hen Sie si h dies am Beispiel der Winkelsumme eines Dreie ksdeutli h, dessen E ken der Nordpol und zwei Punkte auf dem �Aquator sind! Denken Sie au h �uberdie Eigens haften sph�aris her Zweie ke na h! 131

132 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONENzum einges hlossenen Winkel �. Wenn wir den Winkel im Gradma� messen undder Kreisbogen den Radius Eins hat, dann betr�agt die L�ange eines Kreisbogens alsogerade x = � � �=180Æ.De�nieren wir die Gr�o�e eines Winkels als L�ange des zugeh�origen Kreisbogens ei-nes Einheitskreises2, so haben wir ein nat�urli hes Ma� ohne jegli he Beliebigkeitgewonnen. Dieses Ma� hei�t Bogenma�:De�nition (Gradma� und Bogenma�):Ein re hter Winkel entspri ht im Gradma� 90Æ, im Bogenma� entspri ht er �=2.Allgemein gilt:Ein Winkel der Gr�o�e � im Gradma� hat im Bogenma� die Gr�o�e x = ���180Æ .Notiz: Von nun an werden wir Winkel immer im Bogenma� messen !Umre hnungstabelle f�ur spezielle Werte:Winkel im Gradma� Winkel im Bogenma�30Æ �=645Æ �=460Æ �=390Æ �=2180Æ �270Æ 3�=2360Æ 2�Satz (Winkelsumme im Dreie k):Die Summe der drei Innenwinkel eines Dreie ks betr�agt � (im Gradma�: 180Æ).Beweis:Vorbemerkung: Zwei Geraden sind genau dann parallel, wenn sie von einer beliebigendritten Gerade unter glei hem Winkel ges hnitten werden. Zieht man also dur h denPunkt C eine zur Basis AB parallele Gerade (siehe Abbildung 10.1), so entspri htdie Summe der Innenwinkel des Dreie ks ABC gerade dem halben Vollwinkel. 2Satz (Fl�a heninhalt eines Dreie ks):Bezei hnen ha, hb und h die H�ohen eines Dreie ks mit den Seiten a, b und ,so gilt f�ur den Fl�a heninhalt:FDreie k = 12aha = 12bhb = 12 h : (10.1)2Ein Kreis mit Radius Eins

10.1. WINKELMESSUNG UND EBENE DREIECKE 133
A B
Cz
y xz
yxAbbildung 10.1: Winkelsumme im Dreie k.Beweis:Der Fl�a heninhalt eines Re hte ks mit den Seiten a und b betr�agt FRe hte k = ab.Wie Abbildung 10.2 zeigt, ist der Fl�a heninhalt eines Parallelogramms glei h demProdukt der L�ange einer Seite und der dazugeh�origen H�ohe ist, FParallelogramm =aha = bhb.Daraus folgt Formel (10.1) f�ur den Fl�a heninhalt eines (beliebigen) Dreie ks. 2ha
.
CD
BA
a
B
CD
A
b
aAbbildung 10.2: Fl�a heninhalt von Re hte k, Parallelogramm und der damit de�niertenDreie ke DBC bzw. ABD.Erinnerung:In einem re htwinkligen Dreie k wird die l�angste Seite Hypothenuse genannt,die beiden anderen Seiten hei�en Katheten.Satz von Pythagoras:In einem re htwinkligen Dreie k mit Katheten a und b und Hypothenuse gilta2 + b2 = 2 : (10.2)Beweis:Werfen Sie au h Bli k auf die Webpagehttp://SunSITE.UBC.CA/LivingMathemati s/V001N01/UBCExamples/Pythagoras/pythagoras.htmlDort �nden Sie einen sehr s h�onen interaktiven Beweis, bei dem Sie spieleris h denSatz des Pythagoras na hvollziehen k�onnen. Weitere \bewegte" Beweise �nden Sieauf: http://www.math.ub . a/people/fa ulty/ ass/Eu lid/java/html/pythagoras.html

134 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN10.2 Sinus und CosinusGeometris he De�nition:In einem re htwinkligen Dreie k (siehe Abbildung 10.3) sind Sinus undCosinusals Verh�altnis der dem betra hteten Winkel gegen�uberliegenden beziehungsweiseder am Winkel anliegenden Kathete zur Hypothenuse de�niert,sin(x) = a Merkhilfe : Sinus = GegenkatheteHypothenuseund (10.3) os(x) = b Merkhilfe : Cosinus = AnkatheteHypothenuse
sinxcosxtanx =
cosx
sinx
cotx cosxsinx tanx= = 1
x
1
1
x
A C D
B
.
.
n
hcm
c
a = c sin(x)
b = c cos(x)
Abbildung 10.3: Bestimmungsgr�o�en eines re htwinkligen Dreie ks und trigonometris heFunktionen.Mit dem Satz von Pythagoras (10.2) folgt aus (10.3) die extrem hilfrei he Beziehungsin2(x) + os2(x) = 1 : (10.4)BEMERKUNG: Die Notation sin2(x) bezei hnet na h der allgemeinen Konventioneigentli h die Funktion sin(sin(x)), ganz korrekt sollte man daher in (10.4) [sin(x)℄2und [ os(x)℄2 s hreiben. Wenn jedo h keine Verwe hslungsgefahr besteht, zieht mandie k�urzere Notation sin2(x) und os2(x) vor.

10.2. SINUS UND COSINUS 13510.2.1 N�aherungsformeln f�ur kleine WinkelIm Bogenma� ist die L�ange des Kreisbogens BD in Abbildung 10.3 dur h � xgegeben. F�ur kleine x ist diese Gr�o�e n�aherungsweise glei h der L�ange � sinx desLotes BC, so dass gilt: sin(x) � x f�ur jxj � 1 : (10.5)Mit Hilfe des Satzes von Pythagoras erh�alt man aus (10.5) f�ur den Cosinus dieN�aherungsformel os(x) =q1� sin2(x) �p1� x2 � 1� 12x2 f�ur jxj � 1 ; (10.6)wobei im letzten S hritt eine Taylorentwi klung der Funktion f(x) = p1� x2 vor-genommen wurde. Da f(0) = 1, f 0(0) = 0, f 00 = �1 gilt p1� x2 � 1 � 12x2 f�urjxj � 1. Die zwei Formeln (10.5) und (10.6) sind von gr�o�ter praktis her Bedeu-tung, wenn es darum geht, das Verhalten der Sinus- oder Cosinus-Funktion f�urkleine Argumente x s hnell abzus h�atzen.BEMERKUNG: Die N�aherungsformeln (10.5) und (10.6) gelten nur, wenn x imBogenma� angegeben ist! (Wie lauten die den Formeln (10.5) und (10.6) entspre- henden Ausdr�u ke im Gradma�?)10.2.2 SinusBis jetzt ist die Sinus-Funktion nur f�ur Winkel 0 � x � �=2 de�niert. F�ur Winkelau�erhalb dieses Intervalls de�niert man gem�a� Abbildung 10.4:sin(�x) = � sin(x) ; (10.7)sin(x) = sin(� � x) (10.8)und sin(x+ 2�) = sin(x) : (10.9)Damit ist die Sinus-Funktion auf ganz R de�niert und hat folgende Eigens haften:Symmetrie-Eigens haften der Sinus-Funktion:Na h Glei hung (10.7) ist die Funktion sin(x) eine ungerade Funktion, na h(10.8) ist sie a hsensymmetris h bez�ugli h einer zur Ordinate parallelen Ge-rade dur h den Punkt (�=2; 0), na h (10.9) ist sie periodis h mit Periode 2�.Spezielle Funktionswerte sind sin(0) = sin(�) = 0 ; (10.10)sin(�=2) = 1 (10.11)und sin(3�=2) = �1 : (10.12)Sp�ater werden wir beweisen, dass die Funktion f(x) = sin(x) die lineare Di�eren-tialglei hung d2dx2 f(x) = �f(x) (10.13)

136 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN/2π
-xπ
π
π- /2 -xπ
1
-1
πx0
-xx-x
y=sin(x)
= sin(x)sin( -x)
sin(x)
sin(-x)Abbildung 10.4: Sinus-Funktion: Geometris he Motivation und Graph der Funktionf(x) = sin(x) im Intervall (��=2; �).erf�ullt. Die zweite Ableitung der Sinusfunktion ist also bis auf das Vorzei hen iden-tis h mit der Funktion selbst | je positiver (negativer) der Funktionswert ist, umso st�arker kr�ummt si h die Funktion na h unten (na h oben). An der Nullstelle derFunktion vers hwindet die zweite Ableitung. Siehe au h no hmals Abbildung 10.4.10.2.3 CosinusAus Abbildung 10.5 sind die zwei Identit�aten os(x) = sin(x + �=2) (10.14)und sin(x) = � os(x+ �=2) (10.15)ersi htli h.Zusammen mit (10.7), (10.8) und (10.9) gilt daher os(�x) = os(x) ; (10.16) os(x) = � os(� � x) (10.17)und os(x+ 2�) = os(x) : (10.18)Symmetrie-Eigens haften der Cosinus-Funktion:Na h Glei hung (10.16) ist die Funktion os(x) eine gerade Funktion, na h(10.17) ist sie punktsymmetris h bez�ugli h des Punktes (�=2; 0), na h (10.18)ist sie wie die Funktion sin(x) periodis h mit Periode 2�.Aus (10.14) und (10.10) { (10.12) folgen die speziellen Funktionswerte os(�=2) = os(3�=2) = 0 ; (10.19) os(0) = 1 (10.20)und os(�) = �1 : (10.21)

10.2. SINUS UND COSINUS 137x+ /2π
/2π
x+ /2π
- /2π
x-x
y=cos(x)
-1 0 1
x
π
-x
cos(x)=cos(-x)
cos(x+ /2) = -sin(x)π
sin(x)sin(x+ /2) = cos(x)π
Abbildung 10.5: Cosinus-Funktion: Geometris he Motivation und Graph der Funktionf(x) = os(x) im Intervall (��=2; �).10.2.4 Werte von Sinus und Cosinus f�ur spezielle ArgumenteF�ur x = 0, �=6, �=4, �=3 und �=2 nehmen die Funktionen Sinus und Cosinuseinfa he Werte an, die aus dem Satz vom Pythagoras und Symmetrie�uberlegungenabgeleitet werden k�onnen (\nd" bedeutet \ni ht de�niert"):3x 0 �=6 �=4 �=3 �=2sin(x) 0 = 12p0 12 = 12p1 12p2 12p3 1 = 12p4 os(x) 1 12p3 12p2 12 0tan(x) 0 p1=3 1 p3 nd ot(x) nd p3 1 p1=3 0SELBSTTEST: Leiten Sie die angegebenenWerte her. Skizzieren Sie dazu die diesenSpezialf�allen entspre hende Dreie ke und �uberlegen Sie si h, wel he Symmetrienexistieren.3Die Funktionen tan(x) [Tangens℄ und ot(x) [Cotangens℄ werden in Abs hnitt 10.3 de�niert.

138 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN-1
-0.5
0
0.5
1
-2.0π -1.5π -1.0π -0.5π 0.0π 0.5π 1.0π 1.5π 2.0πx
y sin(x)cos(x)
Abbildung 10.6: Verglei h der Sinus- und Cosinus-Funktion.Die Werte der trigonometris hen Funktionen f�ur Argumente x, die gegen�uber dentabellierten Argumenten um �=2, � oder 3�=2 vers hoben sind, folgen direkt mitHilfe der Symmetrieeigens haften (10.7) bis (10.9) und (10.14) bis (10.18).Dabei gilt f�ur die Vorzei hen:0 0<x< �2 �2 �2 <x<� � �<x< 3�2 3�2 3�2 <x<2�sin(x) 0 + 1 + 0 � �1 � os(x) 1 + 0 � �1 � 0 +tan(x) 0 + nd � 0 + nd � ot(x) nd + 0 � nd + 0 �10.2.5 AdditionstheoremeUm Ableitungen von Sinus und Cosinus zu bere hnen, m�ussen wir Ausdr�u ke derForm sin(x + y) und os(x + y) f�ur kleine y auswerten. Dazu leiten wir zuerstganz allgemein die Additionstheoreme f�ur die Sinus- und Cosinus-Funktion her.Wir fragen also, ob sin(x + y) beziehungsweise os(x + y) dur h Kombinationenvon trigonometris hen Funktionen der Einzelwinkel x und y ausgedr�u kt werdenk�onnen.4In der Skizze sind die L�angen AB und AD jeweils als Eins gew�ahlt, sin(x + y)entspri ht also der Stre ke DF . Weiterhin bemerken wir, dass die Hypothenusenund l�angeren Katheten der beiden Dreie ke ABC und DEF lotre ht aufeinanderstehen. Die beiden Dreie ke sind also �ahnli he Dreie ke, womit entspre hende Seitenzueinander proportional sind. Dies bedeutet insbesonderesin(x+ y) : DE = AC : AB = os(x) : 1 = os(x) : (10.22)Wir wissen jedo h no h ni ht, wie gro� DE ist. Es gilt aberDE = DG+GE wobei DG = sin(y) (10.23)und GE : AG = CB : AC : (10.24)Da AG = os(y) ; CB = sin(x) und AC = os(x) ; (10.25)4F�ur andere wi htige Funktionen kennen wir bereits die entspre henden Formeln. F�ur Expo-nentialfunktionen ist die Situation besonders einfa h: ax+y = ax � ay . F�ur Potenzfunktionen giltder binomis he Satz: (x+y)n =Pnk=0 �nk�xkyn�k . F�ur Logarithmusfunktionen exisitiert dagegenkeine verglei hbare Formel. Die Logarithmusfunktionen sind ja genau so de�niert, dass sie verein-fa ht werden k�onnen, wenn ihr Argument ein Produkt ist, loga(x � y) = loga(x) + loga(y), ni htjedo h wenn es eine Summe ist.

10.2. SINUS UND COSINUS 139
A F E C
D
Gyx
B
.
.
1
Abbildung 10.7: Skizze zum Additionstheorem der Sinus-Funktion.folgt aus (10.24) und (10.25) GE = sin(x) os(x) os(y) (10.26)und zusammen mit (10.22) und (10.23) das gesu hte Additionstheorem f�ur denSinus: sin(x + y) = os(x) sin(y) + sin(x) os(y). Ersetzen wir in dieser Formel ydur h y+�=2 und wenden (10.14) und (10.17) an, so erhalten wir das entspre hendeAdditionstheorem f�ur den Cosinus. Wir fassen zusammen:Satz (Additionstheoreme f�ur Sinus und Cosinus):Sei x; y 2 R. Dann gilt:sin(x + y) = os(x) sin(y) + sin(x) os(y) (10.27)und os(x+ y) = os(x) os(y)� sin(x) sin(y) : (10.28)F�ur Interessierte: Leiten Sie (10.28) direkt na h dem Muster von (10.27) her!10.2.6 Ableitung von Sinus und CosinusMit Hilfe der Additionstheoreme und der N�aherungsformeln (10.5) und (10.6) k�on-nen wir nun die Ableitungen von Sinus und Cosinus bere hnen:ddx sin(x) = limh!0 sin(x+ h)� sin(x)h= limh!0 os(x) sin(h) + sin(x) os(h)� sin(x)h

140 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN= os(x) limh!0 sin(h)h + sin(x) limh!0 � os(h)� 1h �= os(x) � 1 + sin(x) � 0= os(x) :In glei her Weise erh�alt man: ddx os(x) = � sin(x) :SELBSTTEST: Leiten Sie die Glei hung her!Wir halten fest:Satz (Ableitung der Sinus- und Cosinus-Funktion):Sie x 2 R. Dann gilt ddx sin(x) = os(x) (10.29)und ddx os(x) = � sin(x) : (10.30)BEMERKUNG: Kennt man eines der beiden Additionstheoreme (10.27) oder (10.28),so kann man das zweite au h dur h Ableitung erhalten: os(x+ y) = ddx sin(x+ y) = ddx [ os(x) sin(y)℄ + ddx [sin(x) os(y)℄= � sin(x) sin(y) + os(x) os(y)Bere hnen wir nun mit Hilfe von (10.29) und (10.30) die zweite Ableitung der Sinus-bzw. Cosinus-Funktion, so erhalten wird2dx2 sin(x) = ddx � ddx sin(x)� = ddx os(x) = � sin(x)und (10.31)d2dx2 os(x) = ddx � ddx os(x)� = ddx [� sin(x)℄ = � os(x)Sinus wie Cosinus haben also beide die Eigens haft, dass ihre zweiten Ableitungenbis auf das Vorzei hen mit der jeweiligen Ausgangsfunktion �ubereinstimmen. ImGegensatz dazu ist d2dx2 exp(x) = +exp(x): Bei der Exponentialfunktion ergibt si hkein Vorzei henwe hsel. Dies ist letztli h der wesentli he Unters hied zwis hen ex-ponentiellem Wa hstum und Zerfall auf der einen, und harmonis hen S hwingungenauf der anderen Seite.In sp�ateren Kapiteln werden wir beim Studium von Di�erentialglei hungen zweiterOrdnung no h mehrmals auf diese Verbindung der auf den ersten Bli k so unter-s hiedli hen Funktionen exp(x) und sin(x) bzw. os(x) sto�en. Dieser Zusammen-hang wird jedo h au h s hon o�ensi htli h, wenn wir die Taylorentwi klung vonSinus und Cosinus betra hten.

10.2. SINUS UND COSINUS 14110.2.7 Taylorentwi klung der Sinus- und Cosinus-FunktionIm Kapitel 9.3.2 war die Entwi klung der Exponentialfunktion diskutiert worden.Aus der Forderung ddx exp(x) = exp(x) und exp(0) = 1 hatten wir die Reihendar-stellung exp(x) = 1Xk=0 xkk! (10.32)gewonnen. F�ur jxj � 1 folgt daraus in linearer N�aherung:exp(x) � 1 + x f�ur jxj � 1 : (10.33)Wendet man den glei hen Zugang auf Sinus und Cosinus an, so folgt aus (10.31)und der Forderung sin(0) = 0 beziehungsweise os(0) = 1sin(x) = 1Xk=0(�1)k x2k+1(2k + 1)!= x� x33! + x55! � x77! + ::: (10.34)und os(x) = 1Xk=0(�1)k x2k(2k)!= 1� x22! + x44! � x66! + ::: (10.35)SELBSTTEST: Leiten Sie diese beiden Formeln her!BEMERKUNG: Na h dem Muster von (10.31) k�onnen sofort au h alle h�oherenAbleitungen von Sinus- oder Cosinus-Funktionen gebildet werden. Na h vierma-liger Ableitung erh�alt man dabei die jeweilige Ausgangsfunktion zur�u k, worausdn+4dxn+4 sin(x) = dndxn sin(x) und dn+4dxn+4 os(x) = dndxn os(x) folgt. Insbesondere giltf�ur x0 = 0: ddx os(x)��0 = d2dx2 sin(x)���0 = d3dx3 os(x)���0 = d4dx4 sin(x)���0 = : : : = 0,ddx sin(x)��0 = d4dx4 os(x)���0 = d5dx5 sin(x)���0 = d8dx8 os(x)���0 = : : : = 1 und weiter-hin d3dx3 sin(x)���0 = d2dx2 os(x)���0 = d7dx7 sin(x)���0 = d6dx6 os(x)���0 = : : : = �1. Damitk�onnen die Sinus- und Cosinus-Funktion au h direkt mit Hilfe der Taylorentwi k-lung (9.49) um x0 = 0 entwi kelt werden, was wieder (10.34) und (10.35) ergibt.F�ur kleine Werte von x erh�alt man aus (10.34) und (10.35) die aus der geometris henBetra htung her s hon bekannten N�aherungsformeln:sin(x) � x f�ur jxj � 1 : (10.36) os(x) � 1� 12x2 f�ur jxj � 1 : (10.37)Man bea hte au h die hohe formale �Ahnli hkeit der Exponential- mit den Winkel-funktionen: exp(x) = 1 + x + x2=2 + x3=6 + . . .sin(x) = x � x3=6 + . . . os(x) = 1 � x2=2 + . . .

142 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONENDiese �Ahnli hkeit wird uns im n�a hsten Kapitel au h bei der Diskussion komplexerZahlen begegnen, und wir werden dann au h den inneren Zusammenhang dieser aufden ersten Bli k do h so unters hiedli hen Funktionen besser verstehen.Zuerst jedo h no h zu den von Sinus und Cosinus abgeleiteten Funktionen:10.3 Tangens und CotangensDas Verh�altnis der beiden Katheten eines re htwinkligen Dreie ks wird dur h dieFunktionen Tangens (tan) und Cotangens ( ot) bes hrieben (siehe au h no hmalsAbbildung 10.3), tan(x) = sin(x) os(x) f�ur os(x) 6= 0 ; (10.38) ot(x) = os(x)sin(x) f�ur sin(x) 6= 0 ; (10.39)womit f�ur tan(x) 6= 0 gilt: ot(x) = 1tan(x) : (10.40)Aus den Symmetrieeigens haften von Sinus und Cosinus folgttan(�x) = sin(�x) os(�x) = � sin(x) os(x) = � tan(x) ; (10.41)tan(x + �) = sin(x + �) os(x+ �) = � sin(x)� os(x) = tan(x) ; (10.42) ot(�x) = os(�x)sin(�x) = os(x)� sin(x) = � ot(x) ; (10.43) ot(x + �) = os(x+ �)sin(x + �) = � os(x)� sin(x) = ot(x) : (10.44)Tangens und Cotangens sind also ungerade Funktionen mit Periode �, sie weisendamit genau die halbe Periode von Sinus oder Cosinus auf. Weiterhin gilttan(x+ �=2) = sin(x+ �=2) os(x + �=2) = os(x)� sin(x) = � ot(x) (10.45)und ot(x+ �=2) = os(x+ �=2)sin(x+ �=2) = � sin(x) os(x) = � tan(x) : (10.46)F�ur die Ableitungen erh�alt man mit Hilfe der Quotientenregel:ddx tan(x) = 1 os2(x) (10.47)und ddx ot(x) = � 1sin2(x) : (10.48)

10.4. UMKEHRFUNKTIONEN 143
-4
-3
-2
-1
0
1
2
3
4
-1.0π -0.5π 0.0π 0.5π 1.0π
x
y
tan(x)cot(x)
Abbildung 10.8: Graph der Tangens- und Cotangens-Funktion, f(x) = tan(x) undf(x) = ot(x) im Intervall [��; �℄.10.4 Umkehrfunktionen10.4.1 Ar ussinusVariiert man x zwis hen ��=2 und �=2 so wird der gesamte Werteberei h, �1 �sin(x) � 1, errei ht. Damit kann auf dem Intervall [�1; 1℄ die Umkehrfunktiondes Sinus, der Ar ussinus (ar sin) de�niert werden. Als Werteberei h wird dabei�ubli herweise das Intervall [��=2; �=2℄ gew�ahlt.BEMERKUNG: Zur Namensgebung: y = ar sinx bezei hnet genau den Winkel yim Bogenma� (Ar us), dessen Sinus den Wert x besitzt.F�ur die Ableitung des Ar ussinus erh�alt man f�ur �1 < x < 1 aus dem allgemeinenSatz zur Ableitung von Umkehrfunktionen (Glei hung 9.17):ddx ar sin(x) = 1p1� x2 ; (10.49)Herleitung von Glei hung (10.49)Aus Glei hung (9.17) folgt ddx ar sin(x) = 1 os(ar sin(x)) . Na h dem Satz des Pytha-goras gilt os(x) = �p1� sin2(x), wobei das positive Vorzei hen zu w�ahlen ist, falls��=2 � x � �=2, das negative Vorzei hen, falls �=2 � x � 3�=2. (Warum ist diesso?). Damit gilt os(ar sin(x)) = �p1� sin2(ar sin(x)) = �p1� x2. Da wir alsWerteberei h von ar sin(x) das Intervall [��=2; �=2℄ gew�ahlt haben, folgt (10.49). 2

144 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN
-0.5π
0.0π
0.5π
1.0π
-1 -0.5 0 0.5 1 x
yarcsin(x)
arccos(x)
Abbildung 10.9: Graph der Funktionen Ar ussinus und Ar us osinus f(x) = ar sin(x)und f(x) = ar os(x) im Intervall (�1;+1).10.4.2 Ar us osinusAnalog zum Ar ussinus de�niert man auf dem Intervall [�1; 1℄ den Ar us osinusals Umkehrfunktion zum Cosinus und w�ahlt als Werteberei h �ubli herweise dasIntervall [0; �℄.Der Satz zur Ableitung von Umkehrfunktionen ergibt f�ur �1 < x < 1ddx ar os(x) = � 1p1� x2 : (10.50)

10.5. AUFGABEN 14510.4.3 Ar ustangens und Ar us otangensDer Werteberei h von Tangens und Cotangens ist ganz R, so dass ihre Umkehr-funktionen Ar ustangens (ar tan) und Ar us otangens (ar ot) ebenfalls aufganz R de�niert werden k�onnen. Als Werteberei h f�ur den Ar ustangens wird �ubli- herweise das Intervall [��=2; �=2℄ verwendet, f�ur den Ar us otangens das Intervall[0; �℄.F�ur die Ableitungen gilt mit Hilfe des Satzes zur Ableitung von Umkehrfunktionen:ddx ar tan(x) = 11 + x2 (10.51)und ddx ar ot(x) = � 11 + x2 : (10.52)SELBSTTEST: Leiten Sie Glei hung (10.50), (10.51) und (10.52) na h dem Mustervon (10.49) her.
-0.5π
0.0π
0.5π
-10 -5 0 5 10x
y
arctan(x)arctan(10x)
arctan(0.1x)
Abbildung 10.10: Graph der Funktion Ar ustangens, f(x) = ar tan(x).10.5 Aufgaben1. (Trigonometris he Funktionen)(a) Leiten Sie die Funktionswerte von Sinus, Cosinus, Tangens und Cotangens f�urx = �=6, �=4 und �=3 her. Betra hten Sie dazu re htwinklige Dreie ke mit denentspre henden Winkeln und der Hypothenusenl�ange Eins. Wenden Sie denSatz von Phytagoras an, um die L�ange der Katheten zu bere hnen. Hinweis: inwel hem Verh�altnis stehen die Seiten eines Dreie ks, in dem alle Winkel glei h60Æ sind?(b) Fertigen Sie eine Skizze der Graphen der Funktionen Sinus, Cosinus, Tangensund Cotangens an und tragen Sie die Ergebnisse aus Aufgabenteil (a) ein!

146 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN2. (Additionstheoreme) Die Additionstheoreme f�ur Sinus und Cosinus lautensin(x+ y) = os(x) sin(y) + sin(x) os(y) os(x+ y) = os(x) os(y)� sin(x) sin(y)(a) �Uberpr�ufen Sie beispielhaft die Ri htigkeit der Additionstheoreme, indem Siedazu sin(�=2) und os(�=2) bere hnen und dabei einmal �=2 = �=4 + �=4und einmal �=2 = �=6 + �=3 setzen. Verwenden Sie die bekannten Werte derWinkelfunktionen aus der vorherigen Aufgabe.(b) Leiten Sie die beiden Additionstheoreme jeweils einmal na h x und einmalna h y ab. Was f�allt Ihnen auf? Warum sind die Ableitungen na h x und na hy identis h?3. (Tangens und Cotangens) Der Tangens und der Cotangens sind wie folgt de�-niert: tan(x) = sin(x) os(x) und ot(x) = os(x)sin(x)(a) Wo haben die beiden Funktionen ihre Nullstellen?(b) Wie verh�alt si h der Tangens bzw. der Cotangens an den Stellen, wo os(x) = 0bzw. sin(x) = 0 ist?( ) Bere hnen Sie die erste Ableitung von Tangens und Cotangens dur h Anwen-dung der Quotientenregel. Wel hen Wert haben die Ableitungen an den Null-stellen von Tangens und Cotangens?(d) Skizzieren Sie die Graphen von Tangens und Cotangens.4. (Anwendung aus der Populations�okologie) In Oberbergen (Kaiserstuhl) wurdedas Wanderverhalten der Zebras hne ke (Zebrina detrita) untersu ht. Die Vermu-tung war, da� si h die S hne ken in den B�os hungen zwis hen den Weinbergenhaupts�a hli h hangaufw�arts bewegen, um Abdriftverluste, die dur h starke Re-genf�alle oder Erosion entstehen, auszuglei hen. Es mu�te also die mittlere Aus-breitungsri htung der S hne ken festgestellt werden. Dazu wurden am ersten Tagetwa 100 S hne ken, die innerhalb eines Quadratmeters gefunden wurden, individu-ell markiert und ihre Position vermerkt. Die Position setzt si h aus einem x-Wert,der die Lage parallel zur B�os hung festlegt, und einem y-Wert, der die Lage senk-re ht zur B�os hung festlegt, zusammen. Jede S hne ke hat also am ersten Tag einKoordinatenpaar (x1; y1) zugeordnet bekommen. In den darau�olgenden drei Ta-gen wurden die S hne ken gesu ht und ihre neue Position bestimmt: (x2; y2) amzweiten, (x3; y3) am dritten und (x4; y4) am vierten Tag.(a) Wir betra hten eine einzelne S hne ke. Wie weit istsie vom 1. auf den 2. Tag gekro hen? Betra hten Siedazu das re htwinklige Dreie k in der Abbildung.Wie lang sind die Katheten a und b, ausgedr�u ktin den Koordinaten der S hne ke am ersten und amzweiten Tag, (x1; y1) und (x2; y2)? Bere hnen Sie da-mit die Distanz !(b) In wel he Ri htung ist Sie gekro hen? Bere hnenSie den Winkel � (siehe Abbildung), wiederum inAbh�angigkeit der beiden Koordinatenpaare.(x ,y )2 2
3 3(x ,y )
(x ,y )1 1
(x ,y )4 4
a
b
c
y
x
α
( ) In wel he Ri htung und wie weit ist die S hne ke vom 2. auf den 3., vom 3. aufden 4. und vom 1. auf den 4. Tag gekro hen?

10.5. AUFGABEN 1475. (Ableitung der Umkehrfunktion, Trigonometris he Funktionen) Bere hnen Siedie ersten Ableitungen von Ar ussinus und Ar ustangens dur h Anwendung derRegel zur Di�erentiation von Umkehrfunktionen. Ber�u ksi htigen Sie au h die Be-ziehung sin2(x) + os2(x) = 1, so dass in Ihren Ergebnissen keine trigonometris heFunktionen mehr vorkommen!6. (Kurvendiskussion) Diskutieren Sie das Verhalten der Funktion Ar ustangensund der Funktion \Tangens Hyperboli us", tanh(x) := sinh(x)= osh(x). Verglei- hen Sie ans hlie�end das Verhalten dieser beiden Funktionen.Anmerkung: Der Tangens Hyperboli us tritt bei vielen Betra htungen zur Kinetik hemis her Reaktionen auf und wird au h gerne als ph�anomenologis he Bes hrei-bung monotoner Abh�angigkeiten mit S�attigung (zum Beispiel: Aktivit�at eines Neu-rons als Funktion der Stimulierung) verwendet. Beide Funktionen geh�oren damitzum Basisrepertoire der mathematis hen Biologie.

148 KAPITEL 10. TRIGONOMETRISCHE FUNKTIONEN

Kapitel 11Komplexe ZahlenIn Kapitel 1.3.2 hatte uns die Frage na h der Wurzel aus +2 von den rationalenzu den reellen Zahlen gef�uhrt. F�ur den \biologis hen Hausgebrau h" mag dieseZahlenmenge auf den ersten Bli k ausrei hend ers heinen, do h zeigt die Frage \Wasist die Wurzel aus �1?", dass wi htige mathematis he Operationen ni ht innerhalbder reellen Zahlen ausgef�uhrt werden k�onnen | das Quadrat einer beliebigen reellenZahl muss eine positive reelle Zahl sein, also kann die Wurzel aus�1 keine reelle Zahlsein. Damit k�onnen wir beispielsweise quadratis he Glei hungen wie ax2+bx+ = 0ni ht l�osen, wenn die Diskriminante D = b2=4� a negativ ist (siehe au h Kapitel2.4).Wie wir in den n�a hsten Kapiteln sehen werden, ist die Einf�uhrung von Wurzelnaus negativen Zahlen und das Konzept der sogenannten \komplexen Zahlen" vongro�er praktis her Bedeutung. Ihrer Bezei hnung widerspre hend vereinfa hen diekomplexen Zahlen viele mathematis he Probleme. So erlei htern sie die L�osung vonau h biologis h relevanten Di�erentialglei hungen und das Re hnen mit Winkel-funktionen.11.1 De�nition der Imagin�aren EinheitWie in der Einleitung erw�ahnt, kann die Wurzel aus �1 keine reelle Zahl sein.Um diesen \gordis hen Knoten" der Zahlentheorie zu dur hs hlagen, de�nieren wirbeherzt eine neue Zahl:De�nition:Die imagin�are Einheit i ist de�niert als Wurzel aus �1, sie erf�ullt also dieGlei hung i2 = �1 : (11.1)Abgesehen von dieser neuen De�nition versu hen wir, die von den reellen Zahlenher bekannten Gesetze so weit wie m�ogli h beizubehalten. So sind Wurzeln ausnegativen Zahlen in glei her Weise wie Wurzeln aus positiven Zahlen nur bis auf ihrVorzei hen bestimmt. Die Glei hung x2 = �1 besitzt also zwei L�osungen, x1 = iund x2 = �i da gilt: (�i)2 = (�1)2 � i2 = i2 = �1.149

150 KAPITEL 11. KOMPLEXE ZAHLENSie k�onnen i au h s hli ht als bequeme S hreibweise oder Abk�urzung f�ur p�1ben�utzen und dann so weiterre hnen, wie Sie das von den reellen Zahlen her ge-wohnt sind. Damit gilt 1 � i = i, 0 � i = 0, et . | und nat�urli h als De�nition immerau h die Glei hung i � i = �1.11.2 Arithmetis he Darstellung und Gau�s heZahlenebeneNa hdem i keine reelle Zahl ist, kann sie au h ni ht auf der Zahlengeraden lie-gen. Vom bisherigen Konzept einer eindimensional angeordneten Menge von Zahlenm�ussen wir also Abs hied nehmen und zu einer neuen, zweidimensionalen Zahlen-struktur �ubergehen, die au h komplexe Ebene oder Gau�s he Zahlenebene Cgenannt wird.De�nition:Sei x; y 2 R. Dann wird der Ausdru kz = x+ iy (11.2)eine komplexe Zahl z 2 C genannt, wobei x Realteil und y Imagin�arteilvon z hei�en, was au h alsx = Re (z) ; y = Im (z) (11.3)ges hrieben wird.BEMERKUNG: Im Moment wissen wir no h ni ht, ob wir mit dieser zweidimensio-nalen Anordnung in dem Sinne \dur hkommen" werden, dass alle aus R bekanntenarithmetis hen Operationen nun au h wirkli h innerhalb von C de�niert werdenk�onnen. Bis zum Ende dieses Kapitels werden wir uns jedo h davon �uberzeugt ha-ben!Vergi�t man f�ur einen Moment die Motivation der Gau�s hen Zahlenebene, so kannman die komplexe Zahl z als einen Vektor in einem zweidimensionalen Raum auf-fassen, x und y spielen dann die Rolle artesis her Koordinaten dieses Vektors.Mit Hilfe der so getro�enen Identi�zierung werden wir au h die Addition und Sub-traktion von komplexen Zahlen im n�a hsten Abs hnitt motivieren.Vers hwindet der Imagin�arteil (y = 0), so liegt eine reelle Zahl z = x + 0 � i =x 2 R vor; die reellen Zahlen k�onnen also als Teilmenge der komplexen Zahlenin die komplexe Ebene \eingebettet" werden. Komplexe Zahlen, deren Realteil xvers hwindet, f�ur die also z = iy mit y 2 R gilt, hei�en imagin�are Zahlen | wasf�ur eine Worts h�opfung! Die Menge aller reellen Zahlen bildet die reelle A hse, diealler imagin�aren Zahlen die imagin�are A hse. Anders ausgedr�u kt: die imagin�arenZahlen, z = iy mit y 2 R liegen in glei her Weise wie die reellen Zahlen auf einerGeraden, und da 0 � i = 0 sein soll, s hneiden si h beide Geraden im Ursprung(z = 0 = 0 + i � 0).BEMERKUNG: Da die komplexen Zahlen ni ht auf einer Gerade sondern in ei-ner Ebene liegen, kann man sie ni ht wie reelle Zahlen der Gr�o�e na h anordnen.Aussagen wie \z1 < z2" sind also f�ur z1; z2 2 C �uberhaupt ni ht de�niert!

11.3. ADDITION UND SUBTRAKTION 151
Re z
Im z
z 2
z1 z1
z1 z1
z2
z1+z2
- z1
-
-
2 3
-1-2-3
i
2i
-i
-2i
1
Abbildung 11.1: Gau�s he Zahlenebene und Addition komplexer Zahlen.11.3 Addition und SubtraktionWill man f�ur die komplexen Zahlen die von den reellen Zahlen her bekannten Ope-rationen widerspru hsfrei de�nieren, so m�ussen die alten Re henregeln insbesonderef�ur den Fall zutre�en, dass der Imagin�arteil einer komplxen Zahl vers hwindet. Dieskann f�ur die Addition und Subtraktion dadur h errei ht werden, dass man dieseOperationen komponentenweise f�ur Real- und Imangin�arteil de�niert:De�nition (Addition und Subtraktion):Seien z1 und z2 zwei komplexe Zahlen, z1 = x1 + iy1 und z2 = x2 + iy2.Dann ist ihre Summe alsz1 + z2 = (x1 + x2) + i(y1 + y2) (11.4)de�niert, ihre Di�erenz alsz1 � z2 = (x1 � x2) + i(y1 � y2) : (11.5)Die von den reellen Zahlen her bekannten Eigens haften der Addition (Kommutativ-gesetz, Assoziativgesetz) k�onnen damit direkt auf die komplexen Zahlen �ubertragenwerden. Das Nullelement bez�ugli h der Addition komplexer Zahlen ist die altbe-kannte `0' der reellen Zahlen. Im Raum der komplexen Zahlen gilt dabei 0 = 0+i �0,d.h. Re (0) = 0 und Im (0) = 0.Das zu z = x + iy bez�ugli h der Addition inverse Element �z ist komponen-tenweise gegeben dur h �z = �x � iy. Abgesehen von der �uber die Multiplikationi � i = �1 ges ha�enen Verbindung, auf die wir im n�a hsten Unterkapitel ausf�uhrli hzu spre hen kommen, k�onnen Real- und Imagin�arteil im Moment no h vollkom-men getrennt behandelt werden | wie die zwei Komponenten eines Vektors in derEbene. Deshalb entspri ht die Addition zweier komplexer Zahlen au h genau einerVektoraddition. Daraus folgt:

152 KAPITEL 11. KOMPLEXE ZAHLENSatz (Glei hheit zweier komplexer Zahlen):Zwei komplexe Zahlen z1 = x1 + iy1 und z2 = x2 + iy2 sind genau dann glei h,wenn sie sowohl in ihrem Realteil als au h in ihrem Imagin�arteil �ubereinstimmen:z1 = z2 () x1 = x2 und y1 = y2 : (11.6)Der Satz zeigt au h deutli h:Notiz:Einer Glei hung f�ur komplexe Zahlen entspre henzwei reelle Glei hungen | eine f�ur die Realteile und eine f�ur die Imagin�arteile.Geometris h gesehen ist �z der Punkt der Gau�s hen Zahlenebene, den man dur hPunktspiegelung von z am Ursprung 0 erh�alt. Ordnet man jeder komplexen Zahldur h A hsenspiegelung an der reellen A hse eine neue Zahl �z zu, die die zu zkonjugiert-komplexe Zahl �z genannt wird,�z = x� iy ; (11.7)so kann man Real- und Imagin�arteil kompakt dur hRe (z) = z + �z2 ; Im (z) = �iz � �z2 = z � �z2i : (11.8)darstellen { siehe au h no hmals Abbildung 11.1.11.4 PolarkoordinatendarstellungIm Sinn der Trigonometrie und Vektorre hnung de�niert man den Betrag jzj einerkomplexen Zahl z = x+ iy mit Hilfe des Satzes von Pythagoras als L�ange r des ihrin der komplexen Zahlenebene zugeordneten Vektors,r = jzj =px2 + y2 : (11.9)Der Winkel � zwis hen der x-A hse und dem Vektor wird als Argument arg (z)von z bezei hnet, � = arg (z) = ar tan�yx� : (11.10)Dur h (11.9) und (11.10) gewinnt man aus den artesis hen Koordinaten x und ydie Polarkoordinaten r und �, die umgekehrte Transformation wird dur hx = r os(�) ; y = r sin(�) (11.11)vermittelt, so dass zwei �aquivalente Darstellungen vorliegen, von denen man je na hNotwendigkeit Gebrau h ma ht. Mit (11.11) l�a�t si h (11.2) au h alsz = r[ os(�) + i sin(�)℄ (11.12)s hreiben.BEMERKUNG: F�ur komplexe Zahlen z der Form z = os(�) + i sin(�) gilt na h(11.9): jzj =q os2(�) + sin2(�) = 1. Wo liegen sie also in der komplexen Ebene?

11.5. MULTIPLIKATION 153Wir fassen zusammen:Notiz (Umre hnung Cartesis hen Koordinaten | Polarkoordinaten):Aus den artesis hen Koordinaten x und y einer komplexen Zahl z = x + iyerh�alt man ihre Polarkoordinaten dur hr = jzj =px2 + y2 und � = arg (z) = ar tan�yx� :Aus den Polarkoordinaten r und � einer komplexen Zahl z = r( os� + i sin�)erh�alt man ihre artesis hen Koordinaten dur hx = r os� und y = r sin� :In der Polarkoordinatendarstellung gilt damit: Zwei komplexe Zahlen sind genaudann glei h, wenn sie sowohl in ihrem Betrag als au h in ihrem Argument �uberein-stimmen, d.h. f�ur z1 = r1( os�1+i sin�1) und z2 = r2( os�2+i sin�2) gilt z1 = z2genau dann wenn r1 = r2 und �1 = �2 + 2k� mit k 2 Z.11.5 MultiplikationFordert man, dass die f�ur die Multiplikation reeller Zahlen geltenden Regeln (Kom-mutativgesetz, Assoziativgesetz, Distributivgesetz) au h f�ur komplexe Zahlen geltensoll, so folgt aus der De�nition i � i = �1:Satz (Multiplikation):Seien z1 und z2 zwei komplexe Zahlen, z1 = x1 + iy1 und z2 = x2 + iy2.Dann gilt f�ur ihr Produktz1 � z2 = (x1 + iy1) � (x2 + iy2)= x1 � x2 + x1 � iy2 + iy1 � x2 + iy1 � iy2= x1x2 � y1y2 + i(x1y2 + x2y1) : (11.13)Aus (11.13) folgt, dass das Produkt einer komplexen Zahl z mit einer reellen Zahl einer Stre kung ( > 1) beziehungsweise einer Stau hung ( < 1) des der Zahl zzugeordneten Vektors in der Gau�s hen Zahlenebene entspri ht.Wie aber ist die Multiplikation zweier beliebiger komplexer Zahlen geometris h zudeuten?Zur Beantwortung dieser Frage emp�ehlt es si h, zur Polardarstellung �uberzugehen.Mit z1 = r1( os�1 + i sin�1) und z2 = r2( os�2 + i sin�2) erhalten wir aus (11.13)mit Hilfe der Additionstheoreme (10.27) und (10.28)z1 � z2 = r1r2[( os�1 os�2 � sin�1 sin�2) + i( os�1 sin�2 + sin�1 os�2)℄= r1r2[ os(�1 + �2) + i sin(�1 + �2)℄ : (11.14)Damit gilt: jz1 � z2j = r1r2 und arg(z1 � z2) = �1 + �2 : (11.15)

154 KAPITEL 11. KOMPLEXE ZAHLENNotiz (Interpretation der Multiplikation):Der Betrag jz1z2j des Produktes zweier komplexer Zahlen z1 und z2 entspri htdem Produkt der beiden Betr�age, das Argument der Summe beider Argumente.Bezogen auf die Gau�s he Zahlenebene bedeutet dies, dass der Abstand r desdem Produkt zweier komplexen Zahlen entspre henden Punktes vom Ursprungdur h das Produkt r1 � r2 der Abst�ande der beiden Punkte gegeben ist, derWinkel � dur h die Summe �1+�2 der beiden Winkel | siehe au h Abbildung11.2.Im z
z1
z2
-1
i
2i
-i
21
z21z
z2 z1/
z12
Re z
ϕ1
ϕ12 ϕ2+1ϕ
2ϕ
ϕ2− ϕ1Abbildung 11.2: Multiplikation und Division komplexer Zahlen.Aus (11.13) und (11.9) erhalten wir f�ur das Produkt von z = x+iy und �z = x� iy:z�z = x2 + y2 + i(xy � xy) = x2 + y2 = jzj2. Also erf�ullt der Betrag von z dieGlei hung jzj = pz�z : (11.16)BEISPIEL:Das Produkt von i mit i hat den Abstand eins vom Ursprung, da jij = 1, undden Winkel � von der reellen A hse, da arg (i) = �=2. Damit gilt i � i = �1wie gefordert.Dur h sukzessive Anwendung von (11.14) folgt f�ur Potenzen von komplexen Zahlendie sehr kompakte Moivres he Formel:11F�ur Interessierte:Die Moivres he Formel kann au h dazu verwendet werden, die n-te Wurzelaus einer komplexen Zahl zu ziehen. Su ht man n�amli h f�ur eine vorgegebene komplexe Zahl zna h den L�osungen der Glei hung wn = z, so sagt (11.17), dass der Betrag jwj der gesu htenZahl w der n-ten Wurzel aus dem Betrag jzj der Zahl z entspre hen und der Winkel arg (w) derGlei hung n � arg (w) = arg (z) gen�ugen muss. Die letzte Glei hung hat allerdings n vers hiedeneL�osungen f�ur arg (w) mit 0 < arg (w) � 2�. Geometris h gesehen sind dies all die Winkel arg (w)mit 0 < arg (w) � 2�, deren n-fa hes Vielfa hes gerade mit dem Winkel arg (z) (modulo 2�)�ubereinstimmt.Bemerkung zur modulo-Operation: Die beiden Zahlen a und b seien positive reelle Zahlen.Dividiert man a dur h b, so kann man das Ergebnis immer als a=b = n+ x s hreiben, mit n 2 N

11.6. DIVISION 155Satz (Moivres he Formel):Sei z = r( os�+ i sin�) 2 C. Dann gilt:zn = rn[ os(n�) + i sin(n�)℄ f�ur n 2 N : (11.17)11.6 DivisionAus (11.14) folgt, dass die zu z = r( os� + i sin�) bez�ugli h der Multiplikationinverse Zahl 1=z in Polarkoordinaten dur h jz�1j = 1=r und arg (z�1) = �� gegebenist { siehe au h Abbildung 11.2:Satz (Inverses Element):Sei z = r( os�+i sin�) 2 C. Falls z 6= 0 existiert das zu z inverse Element z�1,z�1 = r�1( os�� i sin�) : (11.18)Mit Hilfe des inversen Elements kann der Quotient zweier komplexer Zahlen z1 undz2 sofort �uber die Identit�at z1=z2 = z1 � z�12 bere hnet werden:Satz (Division):Seien z1; z2 2 C und z2 6= 0. Dann ist der Quotient z1=z2 gegeben dur hz1z2 = z1 � z�12 = r1 � r�12 [ os(�1 � �2) + i sin(�1 � �2)℄ : (11.19)Beweis:Aus Glei hung (11.18) folgt:z1 � z�12 = r1( os �1 + i sin�1) � r�12 ( os�2 � i sin�2)= r1 � r�12 [( os �1 + i sin�1) � ( os �2 � i sin�2)℄= r1 � r�12 [ os(�1 � �2) + i sin(�1 � �2)℄Dabei wurden im letzten S hritt die Additionstheoreme (10.27) und (10.28) mitx = �1 und y = ��2 verwendet. 2BEMERKUNG: Glei hung (11.18) zeigt, dass man die Moivres he Formel f�ur allen 2 Z fortsetzen kann.und x 2 R mit 0 � x < 1. Das Produkt x � b wird dann als \a modulo b" bezei hnet. Beispiele: 8modulo 3 ist 2, 9 modulo 4 ist eins, 3�=2 modulo � ist �=2.Mit Hilfe der Moivres hen Formel ist nun also die n-te Wurzel f�ur alle komplexen Zahlen wohl-de�niert. Die Glei hung w = z1=n hat genau n vers hiedene L�osungen, die Wurzel pz also immergenau zwei unters hiedli he L�osungen, so wie wir dies bisher s hon f�ur Wurzeln aus positivenZahlen gewohnt waren.

156 KAPITEL 11. KOMPLEXE ZAHLENIn artesis hen Koordinaten erh�alt man aus (11.13) f�ur z1 = x1 + iy1 und z2 =x2 + iy2 z1z2 = x1 + iy1x2 + iy2 = x1 + iy1x2 + iy2 � x2 � iy2x2 � iy2= (x1 + iy1)(x2 � iy2)(x2 + iy2)(x2 � iy2)= x1x2 + y1y2 + i(x2y1 � x1y2)x22 + y22= x1x2 + y1y2x22 + y22 + ix2y1 � x1y2x22 + y22 : (11.20)Die Inverse z�1 einer komplexen Zahl z erh�alt man aus (11.20) indem man z = z2und z1 = 1 = 1 + i � 0 setzt, d.h. x1 = 1, y1 = 0, x2 = x und y2 = y:z�1 = xx2 + y2 � i yx2 + y2 (11.21)Notiz:Die obigen Re hnungen zeigen, dass man mit komplexen Zahlen \ganz normal"re hnen kann. Man a hte nur darauf, na h einer Division den Nenner reell zuma hen (dur h Erweitern mit der zum Nenner konjugiert-komplexen Zahl) unddann Real- und Imagin�arteil zu trennen.An diesen Beispielen wird au h deutli h, dass Multiplikation und Division komplexerZahlen am ges hi ktesten in Polarkoordinaten, Addition und Subtraktion dagegenam einfa hsten in artesis hen Koordinaten dur hgef�uhrt werden.11.6.1 Taylorentwi klung der komplexen ExponentialfunktionDie bisherigen Beispiele zeigen, dass Addition, Multiplikation und davon abgeleiteteFunktionen eins hlie�li h der Wurzelfunktion f�ur komplexe Zahlen wohlde�niertsind. Wie bei den reellen Zahlen kann man dann in einem n�a hsten S hritt au hwieder Polynome betra hten. Dies ist von besonderem Interesse, da die speziellenFunktionen und dabei insbesondere die Exponentialfunktion im Komplexen sehreinfa h �uber die s hon bekannte Potenzreihe (9.37), nun aber mit komplexwertigerVariable z = x+ iy (x; y 2 R) de�niert werden kann,exp(z) = 1Xn=0 znn! : (11.22)Na hdem die Potenzen zn der komplexen Zahl z = x+iy genau den glei hen Geset-zen unterliegen wie die Potenzen der reellwertigen Summe x+y bei der Auswertungdes reellwertigen Ausdru k exp(x + y), mussexp(x+ iy) = ex � eiy (11.23)gelten. Man kann dieses Ergebnis | allerdings nur mit erhebli hem Aufwand |au h direkt mit Hilfe der binomis hen Formel aus Kapitel 3.5 bere hnen. Dies wirdjedo h im Rahmen dieser Vorlesung ni ht als �Ubung empfohlen.

11.6. DIVISION 157Was aber ist eiy f�ur y 2 R?Da (iy)2 = �y2, (iy)3 = �i � y3, (iy)4 = y4, . . . zerf�allt die Reihe (11.22) in zweiTeilreihen, eine reellwertige Reihe und eine Reihe mit rein imagin�aren Termen.Weiterhin treten in der ersten Reihe nur geradzahlige, in der zweiten Reihe nurungeradzahlige Potenzen von y auf. Der Verglei h mit (10.34) und (10.35) enth�ulltdann die sehr s h�one und verbl�u�end einfa he Formeleiy = 1 + iy + (iy)22! + (iy)33! + (iy)44! + (iy)55! + (iy)66! + (iy)77! + : : := 1� y22! + y44! � y66! + : : :+ i � [y � y33! + y55! � y77! + : : :℄= os y + i sin y f�ur y 2 R (11.24)Damit wird im Raum der komplexen Zahlen die �au�erst enge Verkn�upfung vonExponential- und Winkelfunktionen deutli h si htbar!Bere hnet man exp(iy) und exp(�iy) na h Glei hung (11.24) und addiert bezie-hungsweise subtrahiert die beiden re hten Seiten, so erh�alt man eine neue Darstel-lung der Cosinus- und Sinusfunktion, os y = exp(iy) + exp(�iy)2 (11.25)und sin y = exp(iy)� exp(�iy)2i : (11.26)Dur h ges hi kte Kombination zweier komplexwertiger Funktionen auf den re htenSeiten von (11.25) und (11.26) ergeben si h zwei reellwertige Funktionen, Sinus undCosinus, auf der jeweils linken Seite! Dies ist aber letztli h ni ht �uberras hend: Na h(11.7) gilt exp(iy) = osy + i sin y = os y � i sin y = exp(�iy) ; (11.27)so dass (11.25) und (11.26) na h (11.8) genau dem Real- und Imagin�arteil vonexp(iy) entspre hen | und diese beide Zahlen sind na h De�nition jeweils reellwer-tige Gr�o�en.Angewendet auf die imagin�aren Zahlen z1 = iy1 und z2 = iy2 liefert (11.24) s hlie�-li h no h os(y1 + y2) + i sin(y1 + y2) = eiy1+iy2 = eiy1 � eiy2= [ os(y1) + i sin(y1)℄[ os(y2) + i sin(y2)℄= [ os(y1) os(y2)� sin(y1) sin(y2)℄+i[ os(y1) sin(y2) + sin(y1) os(y2)℄ : (11.28)Verglei ht man nun jeweils Realteil und Imaginarteil der linken Seite mit dem ent-spre henden Real- und Imagin�arteil der re hten Seite | beide Ausdr�u ke m�ussenja in Real- und Imagin�arteil �ubereinstimmen | so bekommt man auf einen S hlagdie Additionstheoreme (10.27) und (10.28) f�ur Sinus und Cosinus.Neben dieser wi htigen, alternativen Herleitung der Additionstheoreme liefert (11.24)eine sehr interessante, und viellei ht au h f�ur den einen oder die andere �asthetis hanspre hende Beziehung zwis hen den vier grundlegenden Zahlen e, i, � und 1,ei� = �1 : (11.29)

158 KAPITEL 11. KOMPLEXE ZAHLENEine verglei hbare Verkn�upfung von �, e und 1 ist innerhalb der reellen Zahlen ni htdenkbar.BEMERKUNG: An dieser Stelle wird au h der spra hli he Bezug zu den FunktionenSinus Hyperboli us und Cosinus Hyperboli us deutli h, die als osh(y) = exp(y) + exp(�y)2 (11.30)und sinh(y) = exp(y)� exp(�y)2 (11.31)de�niert sind.In glei her Weise, wie wir hier die Exponentialfunktion im Raum der komplexenZahlen eingef�uhrt haben, kann man au h den komplexen Logarithmus de�nieren,und si h dar�uberhinaus ganz allgemein mit dem Studium komplexwertiger Funk-tionen bes h�aftigen, was die L�osung vieler Probleme aus der angewandten Ma-thematik in Physik, Chemie, Biologie und den Ingenieurwissens haften erhebli herlei htert. Wir wollen dies aber im Rahmen der Vorlesung ni ht tun und uns viel-mehr, na hdem wir nun die wi htigsten speziellen Funktionen und ihre Beziehungenkennengelernt haben, mit der Integration als der zur Di�erentiation entgegengesetz-ten Operation befassen.11.7 Aufgaben1. (Komplexe Zahlen: Addition) Bere hnen Sie jeweils die Summe und Di�erenzder komplexen Zahlen z1 und z2. Tragen Sie ans hlie�end jeweils beide Zahlen unddas Ergebnis in die Gau�s he Zahlenebene ein. Bere hnen Sie au�erdem Betragund Argument des Ergebnisses (Sie k�onnen beides dur h Messen in der Zei hnung�uberpr�ufen!) und die zu Ihrem Ergebnis konjugiert komplexe Zahl.(a) z1 = 1 + 3i, z2 = 2 + i(b) z1 = i, z2 = �22. (Komplexe Zahlen: Multiplikation) Bere hnen Sie das Produkt von �i mit(a) i(b) �i ( ) �3(d) 2i+ 1in artesis hen Koordinaten. F�uhren Sie in (a) und ( ) die Re hnung au h in Po-larkoordinaten dur h.3. (Komplexe Zahlen: Potenzen) Bere hnen Sie mit Hilfe der Moivres hen Formelfolgende Potenzen der komplexen Zahl z. Dazu m�ussen Sie zuerst den Betrag unddas Argument von z bestimmen. Tragen Sie jeweils z und die bere hnete Potenzvon z in die Gau�s he Zahlenebene ein.(a) z2 , f�ur z = 1 + i (b) z3 , f�ur z = 2i4. (Komplexe Zahlen, trigonometris he Funktionen) Wir wollen mit Hilfe der Moi-vres hen Formel zeigen, dass gilt: sin(3�) = 3 os2(�) sin(�) � sin3(�). Gehen Siedabei wie folgt vor:

11.7. AUFGABEN 159(a) Bere hnen Sie z3 mit der Formel von Moivre f�ur z = os(�) + i sin(�).(b) Bere hnen Sie mit dem binomis hen Satz z3 = [ os(�) + i sin(�)℄3 und trennenSie das Ergebnis in Real- und Imagin�arteil.( ) Verglei hen Sie nun jeweils Real- und Imagin�arteil aus den Ergebnissen von (a)und (b). Wel he Glei hung f�ur sin(3�) erhalten Sie?(d) Testen Sie Ihr Resultat f�ur � = 0, � = �=4, � = �=3 und � = �=2.5. (imagin�are Exponentialfunktion) Sie kennen bereits die Taylorreihe der Expo-nentialfunktion ex = 1Xk=0 xkk!(a) Geben Sie die Taylorreihe von ei� an, indem Sie in die Taylorreihe der Expo-nentialfunktion i� statt x einsetzen.(b) S hreiben Sie die ersten se hs Glieder dieser Reihe aus, verwenden Sie dabeii2 = �1 und trennen Sie na h Real- und Imagin�arteil.( ) Sie kennen au h s hon die Taylorreihen von sin(�) und os(�)sin(�) = 1Xk=0 (�1)k(2k + 1)!�2k+1 und os(�) = 1Xk=0 (�1)k(2k)! �2kErkennen Sie diese im Real- und Imagin�arteil aus Teilaufgabe (b) wieder? Istalso die Beziehung ei� = os(�) + i sin(�)ri htig?(d) Die Polarkoordinatendarstellung einer beliebigen komplexen Zahl z lautetz = r[ os(�) + i sin(�)℄Ersetzen Sie darin os(�) + i sin(�) dur h das Ergbnis aus ( ).(e) Bere hnen Sie Betrag und Argument der komplexen Zahl z = 1+ i. Stellen Siez in der im Aufgabenteil (d) gefundenen kompakten Form der Polarkoordina-tendarstellung dar.6. (Komplexe Zahlen: Division) Bere hnen Sie Real- und Imagin�arteil des Quotien-ten q = z1=z2 f�ur folgende Zahlen z1 und z2. Erweitern Sie dazu den Bru h mit derkomplex konjugierten Zahl �z2 des Nenners z2 und wenden Sie die dritte binomis heFormel an, um den Nenner reell zu ma hen (wie in der Vorlesung demonstriert).(a) z1 = 1� i, z2 = 1 + i(b) z1 = 3i� 2, z2 = 2� 4i( ) z1 = a+ ib, z2 = + id7. (Moivres he Formel) In der Aufgabe 5 wurde gezeigt, dass eine komplexe Zahlz au h in folgender kompakter Form dargestellt werden kann:z = rei' ; r = jzj und ' = arg (z)

160 KAPITEL 11. KOMPLEXE ZAHLEN(a) Bere hnen Sie z3 f�ur z = 2ei�=6 und geben Sie das Ergebnis in der arithmeti-s hen Darstellung (z = x+ iy) an. Verwenden Sie dabeiei' = os(') + i sin(')und die Tabelle im Abs hnitt 10.2.4 der Werte von Sinus und Cosinus f�urspezielle Argumente.(b) Bere hnen Sie allgemein zn f�ur z = rei' und geben Sie das Ergebnis wie inTeilaufgabe (a) in der arithmetis hen Darstellung an. Sie erhalten so die Moi-vres he Formel.8. (Komplexe Zahlen: Wurzeln) Mit Hilfe der Darstellung z = rei' k�onnen wir sehreinfa h Wurzeln von beliebigen komplexen Zahlen z bere hnen. Dazu aber erst eineVor�uberlegung:(a) S hreiben Sie die komplexe Zahl z0 = p2 ei�=4 in der arithmetis hen Darstel-lung. Gehen Sie dabei wie in Aufgabe 7 (a) vor.(b) Was erhalten Sie f�ur die arithmetis he Darstellung der Zahlen z1 = p2 ei(�=4+2�),z0 = p2 ei(�=4+4�) und allgemein z0 = p2 ei(�=4+2k�), (k 2 Z) ?( ) Zeigen Sie f�ur beliebige Zahlen z, da� giltz = rei' = rei('+2k�) ; k 2 ZJede komplexe Zahl kann also auf unendli h viele vers hiedene Weisen darge-stellt werden (f�ur jedes k eine).(d) Ziehen Sie nun aus z = 4ei(�+2k�) ; k 2 Z die Wurzel, bere hnen Sie alsoz1=2. Wel hen Betrag hat z1=2? Was erhalten Sie als Argument von z1=2 f�urk = 0; 1; 2; 3; 4? Wieviele tats�a hli h vers hiedene Zahlen erhalten Sie also?Zei hnen Sie diese und z in die Gau�s he Zahlenebene ein. Haben Sie gemerkt,dass Sie gerade die Wurzel aus einer negativen Zahl gezogen haben?(e) Bere hnen Sie genauso wie in (d) die dritte Wurzel aus z = 8ei�=2. VergessenSie ni ht den Term 2k� im Argument von z. Wieviele vers hiedene L�osun-gen erhalten Sie diesmal? Skizzieren Sie das Ergebnis und z in der Gau�s henZahlenebene.(f) Wir wollen die Glei hung x2 = 9 na h x au �osen. Dazu m�ussen wir aus 9 dieWurzel ziehen. Gehen Sie dabei so vor wie in Teilaufgabe (d) (wel hen Betragund wel hes Argument hat die reele Zahl 9 ?). Wieviele L�osungen erhalten Sie?Kommt Ihnen das bekannt vor?

Kapitel 12Integralre hnung12.1 Einf�uhrung und De�nitionIn Kapitel 9 haben wir den Begri� der Ableitung kennengelernt und dazu verwendet,Eigens haften vorgegebener Funktionen zu untersu hen. An diesen Beispielen istau h deutli h geworden, dass die Ableitung einer Funktion lokale Eigens haftenwiderspiegelt: so ist die Steigung einer Funktion unabh�angig vom Funktionswert.Wir wollen nun ein weiteres wi htiges mathematis hes Konzept diskutieren, mitHilfe dessen gro�r�aumige Eigens haften einer Funktion erfasst werden k�onnen.BEMERKUNG: Falls Sie Zugang zum WWW haben und si h interaktiv mit demKonzept Integral auseinandersetzen wollen, werfen Sie einen Bli k auf:http://www-hm.mathematik.tu-muen hen.de/integration/demoGeometris he De�nition:Das bestimmte Integral einer bes hr�ankten Funktion f(x) : R ! R; x 7!f(x) zwis hen der unteren Grenze a und oberen Grenze b,If (a; b) = Z ba f(x)dx ; (12.1)ist de�niert als die Gr�o�e der Fl�a he zwis hen der Funktion und der x{A hse.Dabei werden Berei he oberhalb der x{A hse positiv, Berei he unterhalb derx{A hse negativ gez�ahlt.BEMERKUNG: Wie bei Summen (siehe dazu au h Glei hung (1.25)) h�angt derWert des Integrals ni ht von der Bezei hnung der Laufvariablen ab. Es gilt alsoR ba f(x)dx = R ba f(v)dv.Mit Hilfe der sogenannten Riemann-Summen kann der Integralbegri� au h for-mal de�niert werden. Hierbei n�ahert man f�ur eine gegebene Zerlegung des Intervalls[a; b℄ die Fl�a he zwis hen Funktion und x{A hse dur h die Summe der Re hte k- �a hen unterhalb bzw. oberhalb der Funktion (siehe Abbildung 12.1) und spri htentspre hend von Unter- und Obersummen der Funktion. Konvergieren nun Unter-wie Obersumme bei immer st�arkerer Verfeinerung der Zerlegung des Intervalls zueinem gemeinsamen Grenzwert, so nennt man die Funktion �uber dem Intervall [a; b℄Riemann-integrierbar, oder au h kurz: integrierbar.161
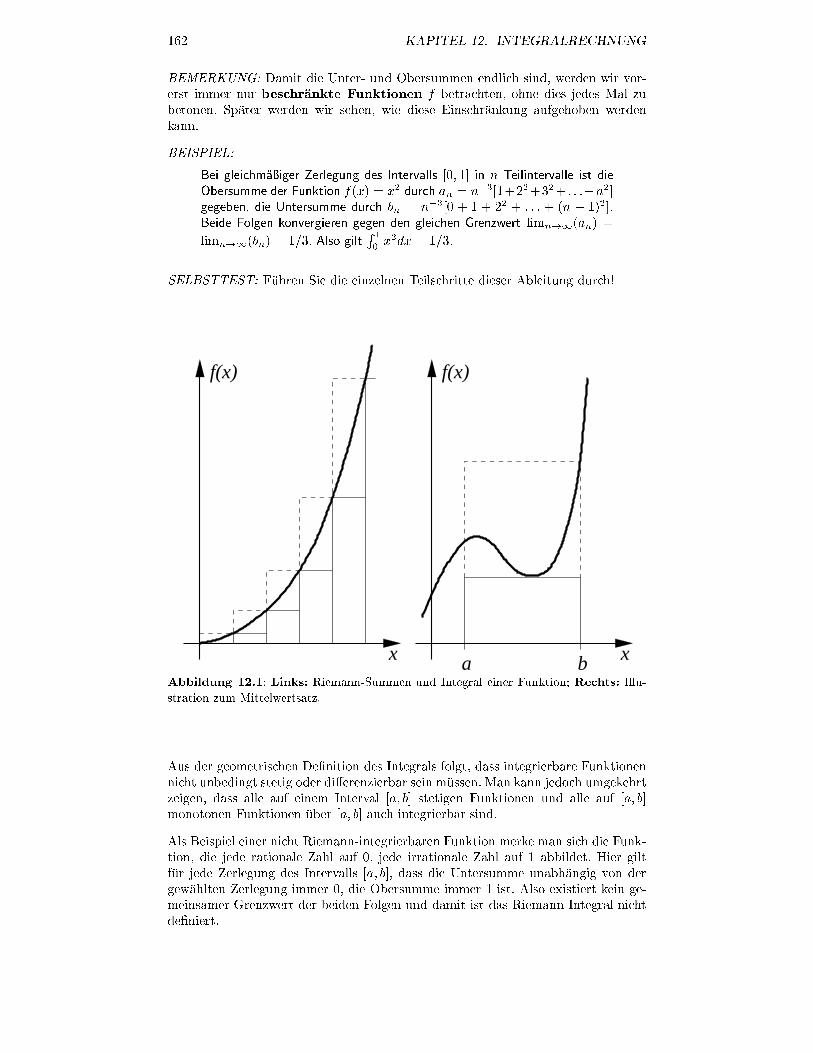
162 KAPITEL 12. INTEGRALRECHNUNGBEMERKUNG: Damit die Unter- und Obersummen endli h sind, werden wir vor-erst immer nur bes hr�ankte Funktionen f betra hten, ohne dies jedes Mal zubetonen. Sp�ater werden wir sehen, wie diese Eins hr�ankung aufgehoben werdenkann.BEISPIEL:Bei glei hm�a�iger Zerlegung des Intervalls [0; 1℄ in n Teilintervalle ist dieObersumme der Funktion f(x) = x2 dur h an = n�3[1+22+32+ : : :+n2℄gegeben, die Untersumme dur h bn = n�3[0 + 1 + 22 + : : : + (n � 1)2℄.Beide Folgen konvergieren gegen den glei hen Grenzwert limn!1(an) =limn!1(bn) = 1=3. Also gilt R 10 x2dx = 1=3.SELBSTTEST: F�uhren Sie die einzelnen Teils hritte dieser Ableitung dur h!f(x) f(x)
xx a bAbbildung 12.1: Links: Riemann-Summen und Integral einer Funktion; Re hts: Illu-stration zum Mittelwertsatz.Aus der geometris hen De�nition des Integrals folgt, dass integrierbare Funktionenni ht unbedingt stetig oder di�erenzierbar sein m�ussen. Man kann jedo h umgekehrtzeigen, dass alle auf einem Interval [a; b℄ stetigen Funktionen und alle auf [a; b℄monotonen Funktionen �uber [a; b℄ au h integrierbar sind.Als Beispiel einer ni ht Riemann-integrierbaren Funktion merke man si h die Funk-tion, die jede rationale Zahl auf 0, jede irrationale Zahl auf 1 abbildet. Hier giltf�ur jede Zerlegung des Intervalls [a; b℄, dass die Untersumme unabh�angig von dergew�ahlten Zerlegung immer 0, die Obersumme immer 1 ist. Also existiert kein ge-meinsamer Grenzwert der beiden Folgen und damit ist das Riemann-Integral ni htde�niert.

12.2. EIGENSCHAFTEN DES BESTIMMTEN INTEGRALS 16312.2 Eigens haften des bestimmten IntegralsAus der De�nition der Riemann-Summen ergeben si h unmittelbar die folgendenS�atze �uber das bestimmte Integral einer bes hr�ankten Funktion f :[1℄ Wenn R ba f(x)dx und R ba g(x)dx existieren, so gilt f�ur beliebige �; � 2 RZ ba [�f(x) + �g(x)℄dx = � Z ba f(x)dx+ � Z ba g(x)dx : (12.2)Die Integration ist also wie die Di�erentiation eine lineare Operation.[2℄ Ist f �uber [a; b℄ integrierbar und [�; �℄ � [a; b℄ so ist f au h �uber [�; �℄integrierbar.[3℄ Ist f �uber [a; b℄ und [b; ℄ integrierbar, so ist f au h �uber [a; ℄ integrierbarund es gilt Z a f(x)dx = Z ba f(x)dx+ Z b f(x)dx : (12.3)[4℄ Um l�astige Fallunters heidungen zu vermeiden, de�niert manZ ab f(x)dx = � Z ba f(x)dx : (12.4)Mit der De�nition (12.4) gilt (12.3) f�ur beliebige Punkte a, b und in einemIntervall, �uber dem f integrierbar ist.[5℄ Ist f(x) � 0 f�ur alle x 2 [a; b℄, so istZ ba f(x) � 0 : (12.5)[6℄ Wenn R ba f(x)dx existiert, so existiert au h R ba jf(x)jdx und es gilt�����Z ba f(x)dx����� � Z ba jf(x)jdx : (12.6)[7℄ Das Produkt integrierbarer Funktionen ist integrierbar.[8℄ Der Quotient integrierbarer Funktionen ist integrierbar, falls der Nenner ankeiner Stelle des betra hteten Intervalls vers hwindet.[9℄ Mittelwertsatz der Integralre hnung:Die Funktion f sei auf dem Intervall [a; b℄ stetig. Dann gibt es (mindestens) ein 2 [a; b℄ so dass f( ) =<f>a;b : (12.7)Hierbei ist der Mittelwert <f>a;b einer Funktion f auf dem Intervall [a; b℄seinem Namen entspre hend als mittlerer Funktionswert de�niert,<f>a;b= 1b� a Z ba f(x)dx : (12.8)

164 KAPITEL 12. INTEGRALRECHNUNGBeweis des Mittelwertsatzes der Integralre hnung:Na h dem Satz vom Maximum und Minimum (Kapitel 8.1) nimmt die Funktion f aufdem Intervall [a; b℄ ein absolutes Maximum fmax und ein absolutes Minimum fminan, da sie na h Voraussetzung stetig ist. Weiterhin gilt f�ur den Mittelwert immerfmax � <f>a;b � fmin. Wegen ihrer Stetigkeit nimmt f jeden Wert zwis hen fminund fmax an (Zwis henwertsatz, Kapitel 8.2.1), also au h den Wert <f>a;b (Sieheau h Abbildung 12.1). 2Na h diesen allgemeinen Regeln wollen wir nun untersu hen, wie Integration undDi�erentiation miteinander zusammenh�angen.12.3 Integration und Di�erentiationDe�nition (Stammfunktion):Sei f : [a; b℄! R eine reellwertige Funktion. Existiert eine reellwertige und aufdem Intervall [a; b℄ di�erenzierbare Funktion F , f�ur dieF 0(x) = f(x) (12.9)gilt, so hei�t F Stammfunktion von f .BEMERKUNG: Zu gegebener Funktion f ist F also eine Funktion, deren Ableitungglei h f ist.Frage: Ist F eindeutig dur h f bestimmt?Antwort: Nein, da mit F (x) au h F (x) + f�ur beliebigen Wert der Konstanten eine Stammfunktion ist! Dies sind aber au h alle m�ogli hen Stammfunktionen zurFunktion f , da nur die Ableitung einer Konstanten f�ur alle x vers hwindet.F�ur stetige Funktionen f erhalten wir eine Stammfunktion F (x) dadur h, dass wirF (x) als Integral �uber f mit beliebiger, aber fester unterer Grenze a und variableroberer Grenze x w�ahlen, F (x) = Z xa f(s)ds : (12.10)Mit Hilfe der De�nitionen (9.2) und (12.1) und der Glei hungen (12.3) und (12.4)gilt dann n�amli h f�ur stetige Funktionen f(x)F 0(x0) = limx!x0 F (x)� F (x0)x� x0= limx!x0 R xa f(y) dy � R x0a f(y) dyx� x0= limx!x0 R x0x f(y) dyx� x0= limx!x0 <f>x;x0= f(x0) : (12.11)Damit ist F (x) = If (a; x) eine Stammfunktion zur Funktion f(x).In glei her Weise, wie mit Hilfe der Di�erentiation aus einer Funktion f eine neueFunktion f 0 erzeugt werden kann, kann dur h Integration eine Funktion F (x) er-zeugt werden, deren Ableitung gerade wieder f ist. Da die Stammfunktion einer

12.3. INTEGRATION UND DIFFERENTIATION 165Funktion f jedo h nur bis auf eine additive Konstante bestimmt ist, ordnet dieIntegration einer bestimmten Funktion f ni ht eine einzige Funktion zu, sonderneine ganze Menge von Stammfunktionen. Diese Menge wird au h unbestimmtesIntegral von f genannt und oft abgek�urzt mitZ f(x)dx : (12.12)BEMERKUNG: Wir sind bisher davon ausgegangen, dass f eine stetige Funktionist. Solange aber f auf dem Intervall [a; b℄ an nur endli h vielen Stellen xi um einenjeweils endli hen Wert springt, k�onnen wir die Funktion (wie bisher) �uber jedemTeilintervall [xi; xi+1℄ integrieren. Wir de�nieren dann das Integral �uber dem ganzenIntervall im Sinn von (12.3) als Summe dieser Teilintegrale. Allerdings gilt (12.9)ni ht an den Sprungstellen xi: dort ist f unstetig, so dass F 0 ni ht de�niert ist.Aus der De�nition einer Stammfunktion ergibt si h der folgende, zentrale Satz:Satz (Hauptsatz der Di�erential- und Integralre hnung):Sei f integrierbar und stetig auf [a; b℄. Dann gilt f�ur jede Stammfunktion F vonf Z ba f(s)ds = Z ba F 0(s)ds = F (b)� F (a) : (12.13)BEMERKUNG: Integration und Di�erentiation sind also exakt entgegengesetztemathematis he Operationen. Weiterhin sagt (12.13) aus, dass wir bei Kenntnis einerStammfunktion F zu einer gegebenen Funktion f das Integral R ba f(s)ds f�ur beliebigeGrenzen a und b bere hnen k�onnen.Ein Hinweis zur Notation: Den Ausdru k F (b)� F (a) k�urzt man in Anlehnung andie Notation eines Integrals gerne mit F jba oder [F ℄ba ab. Damit lautet Glei hung(12.13) Z ba f(s)ds = F jba = [F ℄ba : (12.14)Sind die Stammfunktionen zweier Funktionen f(x) und g(x) bekannt, so k�onnenwir wegen der Linearit�at der Integration (12.2) au h sofort die Stammfunktion vonh(x) = �f(x)+�g(x) f�ur beliebiges � und � bere hnen | dieses Vorgehen entspri htgenau dem beim AuÆnden der Ableitung von �f(x) + �g(x) in Kapitel 9.2.1.Im Gegensatz zur Produkt- und Quotientenregel der Di�erentiation gibt es jedo him allgemeinen keine Regeln, wie das Produkt oder der Quotient von Funktionenintegriert werden kann. Aus den S�atzen [7℄ und [8℄ in Kapitel 12.2 folgt zwar, dassdie jeweiligen Stammfunktionen existieren, ni ht jedo h, wie sie bere hnet werdenk�onnen.Das AuÆnden von Stammfunktionen ist in vielen F�allen s hwierig, oft existiert au hgar keine ges hlossene analytis he Formel f�ur die Stammfunktion einer vorgegebenenFunktion. Es gibt jedo h ausf�uhrli he Tabellen f�ur Stammfunktionen und Integrale,beispielsweise im \Tas henbu h der Mathematik" von Bronstein und Semendjajew

166 KAPITEL 12. INTEGRALRECHNUNG(Verlag Harri Deuts h, Frankfurt), in dem si h au h viele andere n�utzli he ma-thematis he Formeln und Tabellen sowie Kurzzusammenfassungen der wi htigstenmathematis hen Gebiete �nden.Daneben bieten heute Softwarepakete wie Mathemati a, Maple und Matlab nebennumeris her Integration au h Routinen, die (wenn m�ogli h) analytis he Integral-ausdr�u ke liefern.Zwei Methoden zur Bestimmung von Stammfunktionen werden wir in den Kapiteln12.7 und 12.8 kennenlernen, zuerst aber eine Tabelle mit den Stammfunktionenelementarer Funktionen.

12.4. INTEGRALE SPEZIELLER FUNKTIONEN 16712.4 Integrale spezieller FunktionenFunktion f = F 0 Stammfunktion Eins hr�ankung(a; n; x 2 R) F =R f(x)dx (wo relevant: k 2 Z)Potenzen:xn 1n+1xn+1 n 6=�1;x 6=0 f�ur n<�1x�1 ln jxj x 6= 0Exponentialfunktion:exp(ax) a�1 exp(ax) a 6= 0ax (ln a)�1ax a 6= 1Logarithmus:ln(ax) x � [ln(ax)� 1℄ a � x > 0Trigonometris heFunktionen:sin(ax) �a�1 os(ax) a 6= 0 os(ax) a�1 sin(ax) a 6= 0tan(ax) �a�1 ln j os(ax)j a 6= 0, x 6= (2k + 1)�2 ot(ax) a�1 ln j sin(ax)j a 6= 0, x 6= k�1 os2(ax) a�1 tan(ax) a 6= 0, x 6= (2k + 1)�21sin2(ax) �a�1 ot(ax) a 6= 0, x 6= k�Hyperbelfunktionen:sinh(ax) a�1 osh(ax) a 6= 0 osh(ax) a�1 sinh(ax) a 6= 0tanh(ax) a�1 ln osh(ax) a 6= 0 oth(ax) a�1 ln j sinh(ax)j a 6= 0, x 6= 01 osh2(ax) a�1 tanh(ax) a 6= 01sinh2(ax) �a�1 oth(ax) a 6= 0, x 6= 0Weitere wi htigeFunktionen:1a2+x2 1a ar tan �xa� a 6= 0pa2 � x2 12 [xpa2�x2 +a2 ar sin �xa�℄ jxj � a

168 KAPITEL 12. INTEGRALRECHNUNG12.5 Re henbeispiele zur IntegrationBEISPIEL 1: Wel hen Wert hat das Integral R 42 x2dx ?Na h der Tabelle in Abs hnitt 12.4 Stammfunktion von x2.Also gilt: R 42 x2dx = 13x3��42 = 13 (43 � 23) = 18 23BEISPIEL 2: Wel hen Wert hat das Integral R 3�1(2x3 + x� 4)dx ?Eine Stammfunktion lautet: 12x4 + 12x2 � 4x.Also gilt: R 3�1(2x3 + x� 4)dx = ( 12x4 + 12x2 � 4x)��3�1 =[ 1234+ 1232�4�3℄�[ 12 (�1)4+ 12 (�1)2�4�(�1)℄ = 812 + 92�12� 12� 12�4 = 28:BEISPIEL 3: Wie gro� ist die Fl�a he unter der Sinusfunktion sin(x) vonx = 0 bis x = � ?Gesu ht ist also das Integral R �0 sin(x)dx.Es gilt R �0 sin(x)dx = � osxj�0 = � os(�) � [� os(0)℄ = 1 + 1 = 2.H�atten Sie eine derart einfa he L�osung erwartet?BEISPIEL 4: Wel he Fl�a he F (r) hat ein Kreis mit Radius r?Um diese Frage zu beantworten, bere hnen wir die Fl�a he unter dem Viertel-kreis pr2 � x2 mit den Grenzen x = 0 und x = r. Diese Fl�a he entspri htgenau einem Viertel der gesu hten Kreis �a he | siehe au h Abbildung12.2. Eine Stammfunktion (siehe Tabelle in Abs hnitt refIntegrale speziellerFunktionen) vonpr2 � x2 ist 12 [xpr2 � x2+r2 ar sin �xr �℄. Die Kreis �a hehat also den WertF (r) = 4� 12 [xpr2 � x2 + r2 ar sin �xr �℄��r0 = 2�[r2 ar sin(1)�r2 ar sin(0)℄= 2r2�=2 = r2�.BEMERKUNG: Die Formel F (r) = �r2 f�ur die Fl�a he eines Kreises mit Radius rkennen Sie si her s hon, hier haben wir sie mit den uns jetzt zur Verf�ugung ste-henden Methoden hergeleitet. Wir k�onnen nun weiterhin die Frage stellen, wie si hdie Kreis �a he �andert, wenn man den Radius r ver�andert. Mathematis h bedeutetdies, dass wir na h der Ableitung dF (r)=dr der Kreis �a he na h dem Radius fra-gen. F�uhren wir die Ableitung dur h, so erhalten wir den Ausdru k dF (r)=dr =�d(r2)=dr = 2r�. Au h diesen Ausdru k kennen Sie s hon: es ist die Formel f�urden Umfang eines Kreises mit Radius r. Dieses Ergebnis erkl�art si h dadur h, dassdie Fl�a he eines Kreisrings mit innerem Radius r und Breite b dur h die Di�erenzder Fl�a hen zweier Kreise mit Radius r + b und r, also dur h F (r + b) � F (r) =�[(r+ b)2� r2℄ = �[2rb+ b2℄ = b�[2r+ b℄ gegeben ist. Im Grenzfall b! 0 kann derzweite Summand in der Klammer gegen�uber dem ersten verna hl�assigt werden. Indiesem Grenzfall ist die Fl�a he des Kreisringes aber au h dur h das Produkt vonBreite und Umfang gegeben, so dass der Umfang eines Kreises mit Radius r in derTat dur h 2�r gegeben ist.Mit dieser geometris hen Interpretation h�atten wir die Fl�a he eines Kreises mitRadius r au h als Integral R r0 (2�x)dx = 2� x22 jr0 = 2�[r2=2 � 0℄ = �r2, erhaltenk�onnen | derselbe Ausdru k wie in Beispiel 4.In glei her Weise kann man nun au h das Volumen, beispielsweise einer Kugel, alsIntegral �uber geeignet gew�ahlte S hnitt �a hen bere hnen. Bezei hnet die Variable x

12.6. UNEIGENTLICHE INTEGRALE 169
0-r rx
r
Abbildung 12.2: Kreis �a he und Volumen einer Kugel.wieder den Abstand vom Mittelpunkt (nun: der Kugel), so ist die S hnitt �a he alsFunktion von x dur h S(x) = �(r2 � x2) gegeben. Daraus ergibt si h das Volumender Kugel zu V (r) = R r�r S(x)dx = � R r�r(r2�x2)dx = �(r2x� x3=3)��r�r = 2�(r3�r3=3) = 43�r3.BEMERKUNG: Dur h Di�erenzieren na h r erhalten wir daraus mit der glei hen�Uberlegung wie in der letzten Bemerkung die Ober �a he O(r) einer Kugel mitRadius r: O(r) = dV (r)=dr = 4�r2. Die Ober �a he einer Kugel mit Radius r istalso genau viermal so gro� wie die Fl�a he eines Kreises mit glei hem Radius.12.6 Uneigentli he IntegraleBei der De�nition des bestimmten Integrals mit Hilfe der Riemann-Summen wurdein Abs hnitt 12.1 vorausgesetzt, dass die Funktion f(x) bes hr�ankt und das Inte-grationsintervall endli h ist.Integrale, die diese Bedingungen ni ht erf�ullen, werden uneigentli he Integralegenannt. Man de�niert sie als Grenzwerte von Integralen, in denen der Integrand be-ziehungsweise die Integrationsgrenzen endli h sind. Falls der entspre hende Grenz-wert existiert, wird er konvergentes uneigentli hes Integral genannt, ansonstendivergentes uneigentli hes Integral.BEISPIELE:Z 11 x�2dx = lima!1 Z a1 x�2dx = lima!1 ��x�1��a1� = lima!1 ��a�1 + 1� = 1R11 x�1dx divergiert, dalima!1 Z a1 x�1dx = lima!1 ( lnxja1) = lima!1 (ln a)

170 KAPITEL 12. INTEGRALRECHNUNGdivergiert.12.7 Partielle IntegrationDie sogenannte partielle Integration erlaubt es in vielen F�allen, Produkte vonintegrierbaren Funktionen zu integrieren:Satz (Partielle Integration):Die Funktionen f und g seien auf dem Intervall [a; b℄ di�erenzierbar. Dann gilt:Z ba f 0(x)g(x) dx = [f(x)g(x)℄jba � Z ba f(x)g0(x)dx : (12.15)Beweis:Die Regel ergibt si h direkt aus der Produktregel (9.7) f�ur Ableitungen: (f � g)0 =f 0 � g + f � g0. Integriert man n�amli h beide Seiten dieser Glei hung, so erh�alt manZ ba (f � g)0(x) dx = Z ba [f 0(x) � g(x) + f(x) � g0(x)℄dx :Die linke Seite kann mit dem Hauptsatz der Di�erential- und Integralre hnung (12.13)direkt ausgewertet werden und wir erhalten:[f(x)g(x)℄jba = Z ba f 0(x)g(x)dx + Z ba f(x)g0(x)dxoder Z ba f 0(x)g(x)dx = [f(x)g(x)℄jba � Z ba f(x)g0(x)dx : 2Auf den ersten Bli k sieht die re hte Seite von (12.15) komplizierter als die linkeSeite aus. Wel hen Nutzen hat dann aber die partielle Integration?Lassen Sie uns dazu die Integration des Produktes h1(x) � h2(x) zweier vorgegebe-ner Funktionen h1(x) und h2(x) betra hten. Wenn die Ableitung einer dieser beidenFunktionen eine einfa he Gestalt hat, und glei hzeitig die Stammfunktion der an-deren Funktion ni ht komplizierter ist als diese Funktion selbst, dann ist die re hteSeite von (12.15) eventuell lei hter bere henbar als die linke Seite.BEISPIEL 1:Das Integral R ba xe�xdx sei zu bere hnen. Die Ableitung von x ist 1, dasIntegral von e�x ist �e�x. Damit ist genau der gerade angespro hene Falleingetreten. Wir w�ahlen deshalb in (12.15) f 0(x) = e�x und g(x) = x, underhalten f(x) = �e�x und g0(x) = 1, so dassZ ba e�x � x dx = (�e�xx)��ba � Z ba (�e�x) � 1 dx= �e�bb+ e�aa �e�x��ba = e�a(1 + a)� e�b(1 + b) :(12.16)Die partielle Integration kann also genau deshalb erfolgrei h dur hgef�uhrtwerden, da einerseits die Ableitung von x Eins ist und andererseits dieStammfunktion der Exponentialfunktion wieder die Exponentialfunktion ist,so dass das Integral auf der re hten Seite von (12.15) eine einfa he Gestalthat und direkt gel�ost werden kann.BEMERKUNG: F�ur das uneigentli he Integral R10 xe�xdx erhalten wiraus (12.16): R10 xe�xdx = 1.

12.8. SUBSTITUTION 171BEISPIEL 2:Integrale der Form R ba xne xdx mit n 2 N und a; b; 2 R behandelt manna h dem glei hen Muster: man leitet die Potenzfunktion xn ab und in-tegriert die Exponentialfunktion. In jedem S hritt erniedrigt si h dabei derExponent der Potenzfunktion um eins, an der Form der Exponentialfunktion�andert si h bis auf Multiplikation mit �1 ni hts,Z ba xne xdx = 1 xne x����ba � n Z ba xn�1e xdx : (12.17)Na h n partiellen Integration hat man damit das urspr�ungli he Integralgel�ost.BEISPIEL 3:Bei Integralen der Form R ba xn sin( x)dx oder R ba xn os( x)dx geht manin glei her Weise vor. Mit jeder partiellen Integration verringert si h derExponent der Potenzfunktion wieder um eins, w�ahrend die Komplexit�at derWinkelfunktion ni ht anw�a hst | aus Cosinus wird Sinus, aus Sinus wirdminus Cosinus. Damit ist man au h hier na h n S hritten am Ziel.BEISPIEL 4:Bei Integralen der Form R ba xn ln( x)dx geht man genau umgekehrt wie inBeispiel 1 vor. Man integriert die Potenzfunktion, di�erenziert den Loga-rithmus und n�utzt dann die Identit�at d(lnx)=dx = x�1 aus. Ein Beispiel:Das Integral R ba ln(x)dx. Wir s hreiben diesen Ausdru k als R ba 1 � ln(x)dxund interpretieren die Eins als Ableitung von x. Damit erhalten wir:Z ba ln(x)dx = x � lnxjba � Z ba x � x�1dx = b ln b� a ln a� b+ a : (12.18)Mit genau dieser Methode wurde au h die Stammfunktion f�ur lnx in derTabelle von Abs hnitt 12.4 bestimmt.BEISPIEL 5:Bei Integralen wie I=R ba sin( x) exp(�x)dx oder I = R ba os( x) exp(�x)dxintegriert man zweimal partiell und erh�alt damit am S hlu� eine Glei hungder Form I = �+ I , wobei � und von den Integartionskonstanten a undb und den Parametern und � abh�angen. Diese Glei hung kann man f�ur 6= 0 na h I au �osen und erh�alt I = �=(1� ).12.8 SubstitutionIntegrale, deren Integranden in die Form g(f(x)) � f 0(x) gebra ht werden k�onnen,lassen si h mit Hilfe der Substitutionsregel l�osen:Satz (Substitution):Die Funktion f sei auf dem Intervall [a; b℄ di�erenzierbar. Die Funktion g Æ f sei�uber dem Intervall [a; b℄ integrierbar. Dann gilt:Z ba g(f(x)) � f 0(x)dx = Z f(b)f(a) g(u)du : (12.19)

172 KAPITEL 12. INTEGRALRECHNUNGBeweis:Die Substitutionsregel ergibt si h direkt aus der Kettenregel (9.22). Ist n�amli h Geine Stammfunktion von g, so ist G(f(x)) na h der Kettenregel eine Stammfunktionvon g(f(x)) � f 0(x). Damit gilt einerseitsZ ba g(f(x)) � f 0(x)dx = G(f(x))jba = G(f(b)) �G(f(a)) (12.20)und andererseits Z f(b)f(a) g(u)du = G(u)jf(b)f(a) = G(f(b)) �G(f(a)) : (12.21)Aus der Glei hheit der beiden re hten Seiten folgt die Substitutionsregel. 2BEISPIEL 1: Wel hen Wert hat das Integral R �0 sin(3x+ 1)dx ?Wir erkennen, dass das Argument 3x+ 1 der Sinusfunktion linear in x ist,womit seine Ableitung die Konstante 3 ist. Setzen wir also u = f(x) =3x+ 1 und g(u) = sinu, so k�onnen wir das Integral wie folgt umformen:Z �0 sin(3x+ 1)dx = 13 Z �0 3|{z}f 0 sin(3x+ 1| {z }f ) dx = 13 Z 3�+11 sinu du= �13 osuj3�+11= 13[� os(3� + 1) + os(1)℄ = 23 os(1) (12.22)BEISPIEL 2: Wel hen Wert hat das Integral R �0 x sin(x2)dx ?Na hdem wir zwar das Integral der Sinusfunktion kennen, ni ht jedo h dasIntegral von sin(x2), versu hen wir wieder die Substitutionsregel und setzendieses Mal u = f(x) = x2 und g(u) = sin(u). Da nun f 0(x) = 2x erhaltenwir Z �0 x sin(x2)dx = 12 Z �0 2x|{z}f 0 sin( x2|{z}f )dx = 12 Z �20 sinu du= �12 osuj�20 = �12[ os(�2)�1℄ (12.23)BEISPIEL 3: Wie integriert man Ausdr�u ke der Form R ba f 0(x)f(x) dx ?Hier kann man entweder formal die Substitutionsregel mit u = f(x) undg(u) = u�1 anwenden, oder si h no hmals die Essenz der Kettenregel direktverdeutli hen:Z ba f 0(x)f(x) dx = Z ba d[ln(jf(x)j)℄dx dx = ln(jf(x)j)jba= ln(jf(b)j)� ln(jf(a)j) = ln����� f(b)f(a) �����(12.24)Mit diesem Zugang erh�alt man die Stammfunktionen von tan(x), ot(x)und oth(x) in der Tabelle von Kapitel 12.5. Frage: Warum \fehlt" in derFormel der Stammfunktion von tanh(x) die Betragsfunktion?

12.9. AUFGABEN 17312.9 Aufgaben1. (Integration) Bere hnen Sie folgende elementare Integrale(a) Z 21 x2 dx(b) Z 21 6x2 dx( ) Z 21 4x3 dx(d) Z 21 6x2 + 4x3 dx(e) Z 10 e�x dx(f) Z 10 e�2x dx(g) Z �0 sin(x) dx(h) Z 4�0 os(x=2) dx(i) Z ��=2 sin(2x) dx(j) Z 21 4x dx(k) Z b0 9x2 dx ; b 2 R(l) Z 1�1 sinh(x=2) dx2. (Partielle Integration und Substitution) Bere hnen Sie mit Hilfe der partiellenIntegration oder geeigneten Substitutionen folgende Integrale mit a; b 2 R undb > a > 0:(a) Z 10 4xe2x dx(b) Z 10 x2ex dx( ) Z 41 3x2 ln(x) dx (d) Z 10 �2xe�x2 dx(e) Z ba 6x2 sin(2x3) dx(f) Z �0 os(2x+ �) dx3. (Partielle Integration und Substitution) Bere hnen Sie mit Hilfe der partiellenIntegration oder geeigneten Substitutionen folgende Integrale:(a) Z p�=20 x sin(4x2) dx(b) Z 10 xe�x dx( ) Z 10 k2xe�kx dx ; k 2 R (d) Z �0 x2 sin�x3�2� dx(e) Z �=20 os(x) os(sin(x)) dx(f) Z 11 ln(x2)2x2 dx4. (Integration) Werten Sie die folgenden Integrale aus:(a) R 21 x5 dx (b) R ba xn dx, f�ur n > 0 ( ) R ba ( x)n dx, f�ur n > 0(d) R 10 (x3 + 12px) dx (e) R 31 1x2 dx (f) R 10 (x� 1)4 dx(g) R 0�1 exp(x) dx (h) R 1�1(x4 � x2) dx (i) R 1�1(x3 � x) dx(j) R �=2��=2 sin(x) dx (k) R �=2��=2 os(!t) dt (l) R ba sgn(x) dx

174 KAPITEL 12. INTEGRALRECHNUNG5. (Integration) Sei f(x) eine gerade und g(x) eine ungerade Funktion. Zeigen Sie:(a) R a�a f(x) dx = 2 R a0 f(x) dx f�ur alle reellen a.(b) R a�a g(x) dx = 0 f�ur alle reellen a.( ) Was folgern Sie daraus f�ur R a�a f(x)g(x) dx ?6. (Mittelwert) Bere hnen Sie den Mittelwert der Funktion f(x) = 2x� x3(a) auf dem Intervall [1; 4℄ ;(b) auf dem Intervall [�5; 5℄ ;( ) �uber alle reellen Zahlen. Hinweis: Bere hnen Sie zun�a hst den Mittelwert aufeinem Intervall [� ; ℄ und lassen Sie dann gegen unendli h gehen.7. (Integration �uber die Kugel) Bere hnen Sie das Volumen einer Kugel mit RadiusR. Gehen Sie dazu wie in Beispiel 4 von Kapitel 12.5 skizziert vor und verans hau-li hen Sie si h die Methode, indem Sie einige der S hnitt �a hen, �uber die integriertwird, in eine Kugel zei hnen.8. (Substitution) Werten Sie folgende Integrale aus:(a) Z 10 1p1� x2 dx (Tipp: x = sin(y) setzen)(b) Z �=20 os(x) sin2(x) dx (Tipp: u = sin(x) setzen)( ) Z 11 exp(� x1+x )(1 + x)2 dx9. (Partielle Integration) Bere hnen Sie das Integral Z ba [sin(x)℄2 dx(a) mit Hilfe der partiellen Integration,(b) indem Sie zuerst aus der Moivres hen Formel und dem Satz des Pythagoras dieBeziehung sin2(x) = 12 [1 � os(2x)℄ herleiten und damit den Integranden vereinfa- hen.Aus Ihrem Ergebnis folgt insbesondereZ k �20 [sin(x)℄2 dx = Z k �20 [ os(x)℄2 dx = k�4 :Verans hauli hen Sie si h dieses Resultat graphis h.10. (Partielle Integration) Zeigen Sie dur h partielle Integration, dass die Gam-mafunktion �(t) = Z 10 xt�1e�x dx ; t > 0der Glei hung �(t + 1) = t�(t) ; t > 0 gen�ugt und somit eine Verallgemeinerungdes Fakult�atsbegri�es auf reelle Zahlen t > 0 erm�ogli ht. Bere hnen Sie �(n) f�urn 2 f1; 2; 3g explizit.

Kapitel 13Di�erentialglei hungenWie zu Beginn von Kapitel 6 er�ortert wurde, bieten si h zwei Alternativen beider mathematis hen Bes hreibung von dynamis hen Prozessen an: Iterierte Abbil-dungen und Di�erentialglei hungen. Dabei besteht das wesentli he Merkmal einerIterierten Abbildung darin, dass die unabh�angige Variable t eine nat�urli he Zahlist und in diskreten S hritten ansteigt: t = 1; 2; 3; : : : Daraus ergibt si h, dass dieL�osung einer Iterierten Abbildung eine Folge (xt)t2N ist. Iterierte Abbildungen be-s hreiben die Natur also nur \punktweise" zu diskreten Zeitpunkten.1Im Gegensatz dazu su ht man bei einer Di�erentialglei hung na h einer reellenFunktion x : t 7! x(t), deren zeitli he Ableitung(en) eine vorgegebene funktionelleBeziehung erf�ullt. Die unabh�angige Variable ist nun also eine reelle Variable t 2 R.Damit wird die physikalis he Natur der Zeit in der mathematis hen Bes hreibungexplizit ber�u ksi htigt. Der De�nitionsberei h der L�osungsfunktion sind die reellenZahlen R, ni ht mehr nur die nat�urli hen Zahlen N wie im Fall einer Iterierten Ab-bildung. Ein wesentli her Vorteil dieser neuen Bes hreibung besteht darin, dass wirErgebnisse der Di�erential- und Integralre hnung wegen der kontinuierli hen Struk-tur der Zeit direkt auf die Untersu hung dynamis her Prozesse anwenden k�onnen.Im einfa hsten Fall wird die �Anderung einer dynamis hen Variablen x dur h einereelle Funktion f(x) bes hrieben, die angibt, wie gro� die zeitli he Ver�anderungddtx(t) in Abh�angigkeit vom gegenw�artigen Wert x(t) der Variable ist,ddtx(t) = f(x(t)) : (13.1)Eine Di�erentialglei hung, bei der wie in (13.1) nur die erste Ableitung der abh�angi-gen Variablen x auftritt, hei�t Di�erentialglei hung erster Ordnung.BEMERKUNG: Wie bei Iterierten Abbildungen tritt das Konzept Funktion au hbei Di�erentialglei hungen in zwei vollkommen unters hiedli hen Bedeutungen auf:a) Die Di�erentialglei hung (13.1) bedeutet, dass die zeitli he �Anderung ddtx(t) zujedem Zeitpunkt t dur h die Funktion f : x 7! f(x) vorgegeben ist, wobei f�ur xder zu diesem Zeitpunkt angenommene Wert x(t) einzusetzen ist. Die unabh�angigeVariable ist hier also die Gr�o�e x .b) Als L�osung der Di�erentialglei hung (13.1) erh�alt man die Funktion x : t 7! x(t).Nun ist die Zeit t die unabh�angige Variable w�ahrend x eine abh�angige Variablegeworden ist.1Da wir dynamis he Prozesse analysieren wollen, wird die unabh�angige Variable einer Ite-rierten Abbildung oder Di�erentialglei hung vorerst zur Vereinfa hung immer die physikalis heGr�o�e \Zeit" sein. Iterierte Abbildungen und Di�erentialglei hungen treten jedo h au h in Zu-sammenh�angen auf, in denen die unabh�angige Variable ni ht die Zeit ist. Siehe dazu au h dien�a hste Fu�note! 175

176 KAPITEL 13. DIFFERENTIALGLEICHUNGENExkurs in die Physik { Fallgesetze und Planetenbewegung:Na h Newton ist die auf einen K�orper zur Zeit t wirkende Kraft F (t) mit derzeitli hen �Anderung ddtp(t) seines Impulses identis h, der als Produkt von Massem(t) und Ges hwindigkeit v(t) de�niert ist, p(t) = m(t) � v(t):F (t) = ddtp(t) = ddt [m(t)v(t)℄ : (13.2)Ist die Masse des K�orpers konstant, so folgt aus (13.2):F (t) = m ddtv(t) ; (13.3)was landl�au�g au h als \Kraft = Masse � Bes hleunigung" bekannt ist.Beim freien Fall in Erdn�ahe ist die auf einen K�orper wirkende Kraft zeitli hkonstant und glei h seiner Gewi htskraft, F (t) = mg, wobei g = 9:81 m s�2 dieErdbes hleunigung bezei hnet. Damit erhalten wir aus (13.3) na h K�urzen vonm ddtv(t) = g : (13.4)Na hdem die zeitli he Ableitung der Ges hwindigkeit na h (13.4) konstant ist,muss die Ges hwindigkeit als Funktion der Zeit linear anwa hsen,v(t) = v0 + g � t (13.5)wobei v0 die Ges hwindigkeit des K�orpers zur Zeit t = 0 bezei hnet.Wollen wir au h den Ort x(t) des K�orpers als Funktion der Zeit bere hnen, soben�utzen wir, dass die Ges hwindigkeit die zeitli he Ableitung des Ortes ist,v(t) = ddtx(t), und setzen diese Beziehung in (13.5) ein,ddtx(t) = v0 + g � t : (13.6)Da ddtx(t) linear mit t anw�a hst, muss x(t) eine quadratis he Funktion in t sein,x(t) = x0 + v0 � t+ g2 � t2 : (13.7)Hierbei bezei hnet x0 den Ort des K�orpers zur Zeit t = 0.Die hier gezeigte L�osung des Fallproblems ist deshalb m�ogli h, da die Di�eren-tialglei hungen (13.4) und (13.6) einfa he Struktur haben | im ersten Fall istdie Ableitung der gesu hten Funktion eine Konstante, im zweiten Fall w�a hstsie linear. Der tiefere Grund liegt in der einfa hen Form der Gewi htskraft, dieunabh�angig von der Zeit und vom Ort des K�orpers dur h F = mg gegeben ist.Bei der Bewegung eines K�orpers in gr�o�erem Abstand von der Erde (Sa-tellit, Mond) oder der Bewegung der Planeten um die Sonne ist die we h-selseitig wirkende Kraft ni ht mehr konstant sondern h�angt vom gegen-seitigen Abstand ab. Das Kraftgesetz hat nun die Form F = F (x),ywobei f�ur x der momentane Abstand x(t) eingesetzt werden muss. Diesers hwert die mathematis he L�osung. Sie ist in diesem Fall aber no hm�ogli h und f�uhrt auf die drei Keplers hen Gesetze der Planetenbewegung.yF�ur die Gravitationskraft gilt: F (x) / x�2.

177Ein weiteres Beispiel: Bei der Diskussion der Exponentialfunktion in Kapitel 9.3.1haben wir mit der Glei hungddtx(t) = �x(t) mit � 2 R (13.8)eine Di�erentialglei hung kennengelernt, bei der die zeitli he Ableitung einer ge-su hten Funktion | hier x(t) | zur Zeit t vom Wert der Funktion zu diesemZeitpunkt abh�angt.Diese Situation sollte kritis h mit Glei hung (13.4) vergli hen werden. Dort ist dieAbleitung | nun von v(t) | eine Konstante, so dass die Glei hung mit Kenntnisder Stammfunktion g � t der re hten Seite von (13.4) sofort gel�ost ist. Dagegenerfordert die L�osung von (13.8) eine Su he im Raum aller reellen Funktionen na hderjenigen Funktion, deren Ableitung genau mit si h selbst �ubereinstimmt. ZumGl�u k ist dies bei linearen Di�erentialglei hungen wie (13.8) aber lei ht m�ogli h.Aus Kapitel 9.3.1 kennen wir sogar s hon die L�osung von (13.8): x(t) = Ce�t mitC 2 R. Glei hung (13.8) bes hreibt also exponentielle Wa hstums- (� > 0) bzw.Zerfallsprozesse (� < 0).2Wie l�ost man nun eine Di�erentialglei hung wie zum Beispiel ddtx(t) = f(x(t)) beivorgegebener Funktion f(x)? Im Allgemeinen ist diese Frage um einiges s hwererzu beanworten als die Frage \Wie l�ost man die Glei hung x = f(x)?" Im erstenFall geht es ja darum, eine Funktion x : t 7! x(t) zu �nden, deren Ableitung ddtx(t)an jeder Stelle t gerade mit dem Wert f(x(t)) �ubereinstimmt. Im zweiten Fall istdagegen \nur" diejenige Zahl x gesu ht, die genau mit dem Wert der Funktion f ander Stelle x �ubereinstimmt.3Fragestellungen aus den Naturwissens haften und anderen Berei hen haben zu einergro�en Menge von h�o hst unters hiedli hen Di�erentialglei hungstypen gef�uhrt, vondenen viele einen jeweils ganz spezi�s hen L�osungsweg erfordern. Im Rahmen dieserVorlesung werden wir uns auf einfa he Di�erentialglei hungen konzentrieren undim Detail demonstrieren, wie man diese au h f�ur die Biologie wi htigen Systemequalitativ und quantitativ untersu ht.Allgemeine und spezielle L�osungEine Di�erentialglei hung bes hreibt genau wie eine Iterierte Abbildung immer eineganze Familie dynamis her Prozesse. Die Menge dieser Funktionen wird als allge-meine L�osung bezei hnet. Erst die Anfangsbedingung, beispielsweise die Gr�o�e2Wie s hon erw�ahnt, muss die unabh�angige Variable in einer Di�erentialglei hung ni ht unbe-dingt die Zeit t sein. So f�uhrt beispielsweise die Frage, wie der Luftdru k p in der Erdatmosph�aremit der H�ohe h abnimmt, auf eine Di�erentialglei hung der Form ddhp(h) = f(p(h)). Nimmt manweiter an, dass Luft als ein ideales Gas betra htet werden kann und die Lufttemperatur ni ht vonder H�ohe abh�angt, so erh�alt man f�ur erdnahe Lufts hi hten (Annahme: Gewi htskraft unabh�angigvon der H�ohe) die Glei hung ddhp(h) = ��p(h) mit � = g �0p0 ; (13.9)wobei g die Erdbes hleunigung und �0 und p0 die Di hte der Luft bzw. den Luftdru k auf Mee-resh�ohe bezei hnen. Dies f�uhrt auf die Barometris he H�ohenformel p(h) = p0e��h, mit derenHilfe beispielsweise H�ohenmesser von Bergsteigern die errei hte H�ohe aus dem momentanen Dru kbere hnen.Verglei ht man die Di�erentialglei hung (13.9) mit (13.8), so sieht man, dass beide Glei hungenformal identis h sind: Die Rolle der unabh�angigen Variable t in (13.8) spielt nun h, die Rolle derabh�angigen Variable x in (13.8) hat p �ubernommen. Siehe dazu au h Kapitel 9.3.13Selbst dieses zweite Problem ist ni ht immer ges hlossen l�osbar, wie das Beispiel x = e�xzeigt: Diese so einfa h wirkende Glei hung kann ni ht na h x aufgel�ost werden!

178 KAPITEL 13. DIFFERENTIALGLEICHUNGENx(0) der Variablen x zur Zeit t = 0, bestimmt, wel hen Verlauf die dynamis he Ent-wi klung des speziell betra hteten Systems nehmen wird. Anders ausgedr�u kt: dieAnfangsbedingungen legen| abgesehen von pathologis hen F�allen, die in Abs hnitt13.4.1 betra htet werden | die spezielle L�osung eindeutig fest.Wieviele Me�gr�o�en werden ben�otigt, um den Anfangszustand zu harakterisieren?Betra hten wir als Beispiel die Di�erentialglei hung (13.8). Diese Glei hung ver-kn�upft die erste Ableitung ddtx(t) mit x(t), enth�alt also zu jedem Zeitpunkt zweianfangs unbekannte Gr�o�en: ddtx(t) und x(t). Um die Di�erentialglei hung zumZeitpunkt t = 0 zu l�osen, ben�otigt man also eine zus�atzli he vorgegebene Gr�o�e. Inden meisten Problemen wird dies der Wert x0 der Variable x zur Zeit t = 0 sein,in man hen Anwendungen aber au h der Wert dxdt ��t=0 der Ableitung von x zur Zeitt = 0, in seltenen F�allen au h kompliziertere Ausdr�u ke.Wie bei Iterierten Abbildungen besteht die allgemeine Strategie zur L�osung einerDi�erentialglei hung darin, zuerst alle Funktionen x(t) zu �nden, die die Di�eren-tialglei hung erf�ullen | die allgemeine L�osung der Di�erentialglei hung. F�ur dieDi�erentialglei hung (13.8) lautet beispielsweise die allgemeine L�osung x(t) = Ce�tmit C;� 2 R. Damit eine vorgegebene Anfangsbedingung wie x(0) = x0 erf�ullt ist,muss hier C = x0 gelten, wie man dur h Einsetzen sieht. Die Anfangsbedingungk�onnte jedo h beispielsweise au h dur h dxdt ��t=0 = v0 festgelegt sein. Wie m�u�tenun C gew�ahlt werden? Di�erenziert man die allgemeine L�osung na h der Zeit, soerh�alt man ddtx(t) = �Ce�t. Wertet man diese Glei hung zur Zeit t = 0 aus, soerh�alt man dxdt ��t=0 = �C. Da als Anfangsbedingung die Glei hung dxdt ��t=0 = v0erf�ullt werden soll, muss nun C = v0=� gelten. In glei her Weise w�urden andereFormen der Anfangsbedingung zu wieder anderen speziellen L�osungen f�uhren.BEMERKUNG: Bei der Formulierung der allgemeinen L�osung x(t) = Ce�t habenwir gerade angenommen, dass der Parameter C eine reelle Zahl ist. Diese Ein-s hr�ankung war sinnvoll, da wir (13.8) zur Bes hreibung von Wa hstums- bezie-hungsweise Zerfallsprozessen verwenden wollen, so dass x eine reellwertige Gr�o�esein sollte, beispielsweise die Gr�o�e einer Population. Wir werden jedo h sp�aterau h Beispiele studieren, in denen wir in der allgemeinen L�osung komplexe Zahlenzulassen werden. Nur die spezielle L�osung ist physikalis h oder biologis h relevantund sollte deshalb reellwertig sein. Die allgemeine L�osung selbst spielt dagegen nurdie Rolle einer Hilfskonstruktion. Wie wir in Kapitel 14 sehen werden, vereinfa htdieser auf den ersten Bli k obskure \Weg dur hs Komplexe" den Aufwand bei derL�osung von linearen Di�erentialglei hungen ganz erhebli h.13.1 Qualitative Analyse von Di�erentialglei hun-gen der Form ddtx(t) = f(x(t))Es ist oft ni ht m�ogli h, die L�osung einer Di�erentialglei hung in einer explizi-ten Formel anzugeben. F�ur Di�erentialglei hungen erster Ordnung mit nur einerabh�angigen Variablen, die auf die Formddtx(t) = f(x(t)) (13.10)gebra ht werden k�onnen, kann man jedo h das langfristige qualitative Verhaltenselbst dann angeben, wenn man keine ges hlossene L�osung x(t) = : : : �nden kann.Da bei vielen biologis hen Fragestellungen, zum Beispiel der Frage na h der Per-sistenz einer Population, oft s hon die Kenntnis des Langzeitverhaltens wesentli h

13.1. QUALITATIVE ANALYSE VON DIFFERENTIALGLEICHUNGEN 179zum Verst�andnis des Problems beitr�agt, wollen wir uns nun mit der qualitativenAnalyse dieser Di�erentialglei hungen befassen.Wie bei Iterierten Abbildungen sind zeitli h konstante L�osungen x(t) = x? dieeinfa hsten m�ogli hen L�osungen einer Di�erentialglei hung. Sie werden au h stati-on�are L�osungen genannt. Die Ableitung ddtx(t) einer station�aren L�osung na h derZeit muss Null sein, da sie si h gerade dadur h auszei hnet, zeitli h unver�anderli hzu sein. Verglei h mit (13.10) zeigt:Satz (Station�are L�osungen):Ist x? 2 R eine Nullstelle der Funktion f(x),f(x?) = 0 ; (13.11)so ist die konstante Funktion x(t) = x? eine station�are L�osung der Di�erential-glei hung ddtx(t) = f(x(t)).W�ahlt man n�amli h eine Nullstelle von f(x) als Anfangsbedingung, x(0) = x?, sovers hwindet mit f wegen (13.10) au h die Zeitableitung ddtx(t). Eine Nullstelle x?ist also eine L�osung von (13.10), wenn au h eine sehr einfa he.4BEMERKUNG:Wie eine Iterierte Abbildung besitzt die Di�erentialglei hung (13.10)ja na h Form des Graphen von f keine, eine oder mehrere station�are L�osungen.Was kann �uber die L�osungen von (13.10) f�ur x(0) 6= x? gesagt werden?Wa hstum ( ddtx(t) > 0) oder Abnahme ( ddtx(t) < 0) einer L�osung der Di�erential-glei hung (13.10) ist dur h den jeweiligen Wert von f(x) an der Stelle x(t) bestimmt.Wir erhalten:Satz (Qualitatives Verhalten von L�osungen):Eine L�osung x(t) der Di�erentialglei hung ddtx(t) = f(x(t))� w�a hst an der Stelle x0 als Funktion der Zeit wenn f(x0) > 0, und� f�allt an der Stelle x0 als Funktion der Zeit wenn f(x0) < 0.� Sie ist konstant, also eine station�are L�osung, wenn f(x0) = 0.Bea hten Sie an dieser Stelle no hmals genau den Unters hied zwis hen f(x) undx(t): Die Funktion f ist fest vorgegeben und ordnet jedem Wert der Variablen x4Die Bedingung g(x?) = x? (Glei hung 6.4) f�ur eine konstante L�osung einer Iterierten Ab-bildung xt+1 = g(xt) wei ht deutli h von der Bedingung f(x?) = 0 f�ur eine konstante L�osungder Di�erentialglei hung ddtx(t) = f(x(t)) ab. Geht man jedo h von der Iterierten Abbildung zurzugeordneten Di�erenzenglei hung xt+1 � xt = g(xt) � xt = ~g(xt) �uber | siehe dazu au h Fu�-note 2 auf Seite 62 | so erkennt man, dass die Bedingung g(x?) = x? der Bedingung ~g(x?) = 0entspri ht und diese formal mit der Bedingung f(x?) = 0 �aquivalent ist.Diese �Uberlegung zeigt, dass bei einem Verglei h von in der Zeit diskreten Modellen mit Di�e-rentialglei hungsmodellen ni ht die betre�ende Iterierte Abbildung sondern die zugeordnete Dif-ferenzenglei hung betra htet werden sollte.\Fu�note in der Fu�note": In einer Iterierten Abbildung oder einer Di�erenzenglei hung nimmtdie Zeit t nur diskrete Werte an. In der Realit�at entspri ht dies einer S hrittweite �t, die demZeitintervall zwis hen zwei Messungen am System entspri ht. (Bisher haben wir zur Einfa hhheitimmer �t = 1 gesetzt und t 2 N gew�ahlt.) Ver�andert man die S hrittweite �t, so muss au hdie Funktion g in Abh�angigkeit von �t ebenfalls geeignet ver�andert werden um weiterhin denglei hen dynamis hen Prozess zu bes hreiben. Im Grenzfall �t! 0 erh�alt man dabei aus der Dif-ferenzenglei hung eine Di�erentialglei hung. Diskutieren Sie dies am Beispiel eines exponentiellenWa hstumsprozesses, x(t + �) = a(�) � x(t), indem Sie die S hrittweite � sukzessive auf �=2,�=4, : : : verringern. Wie h�angt a(�=2) von a(�) ab, damit der in der Zeit verfeinerte Prozess zuden Zeiten t+ k� mit dem Ausgangsprozess identis h ist?

180 KAPITEL 13. DIFFERENTIALGLEICHUNGENeinen Wert f(x) zu. Dieser Wert f(x) wird dann ben�utzt, um in (13.10) die zeitli heAbleitung von x na h t zu bere hnen. Die L�osung x(t) ist dagegen eine von der Zeitt abh�angige Funktion. Ma hen Sie si h dies in aller Ruhe bewu�t.SELBSTTEST: Verglei hen Sie die Bedingungen f�ur das Anwa hsen bzw. Abneh-men einer L�osung der Di�erentialglei hung ddtx(t) = f(x(t)) mit den entspre hendenBedingungen f�ur die L�osung der Iterierten Abbildung xt+1 = f(xt).-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4x
f(x)dx/dt = -x
-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4x
f(x)dx/dt = x
-8
-6
-4
-2
0
2
4
6
8
0 0.5 1 1.5 2 2.5 3t
x(t)
-8
-6
-4
-2
0
2
4
6
8
0 0.5 1 1.5 2 2.5 3t
x(t)
Abbildung 13.1: Qualitative Analyse der Di�erentialglei hungen ddtx(t) = �x(t) (oben)und ddtx(t) = x(t) (unten). Links ist jeweils der Graph von f(x) gezeigt, re hts L�osungenx(t) f�ur vers hiedene Anfangsbedingungen x(0).BEISPIEL : Qualitative Analyse der Di�erentialglei hung ddtx(t) = �x(t).Wie wir s hon aus Kapitel 9.3.1 wissen, bes hreibt die Di�erentialglei hungddtx(t) = �x(t) exponentielle Wa hstums- bzw. Zerfallsprozesse. Wir wollensie nun qualitativ analysieren ohne ihre analytis he L�osung zu verwenden.F�ur den Spezialfall � = 0 lautet die Glei hung ddtx(t) = 0. In diesemFall ist jede konstante Funktion x(t) = x0 eine station�are L�osung. WeitereL�osungen existieren ni ht | eine re ht langweilige Situation. Im Folgendenwollen wir deshalb � 6= 0 voraussetzen.Die Funktion f(x) = �x hat nun genau eine Nullstelle x?: x? = 0. Damitexistiert unabh�angig von � genau eine station�are L�osung, x(t) = 0 (sieheau h Abbildung 13.1). Falls � < 0, so ist f(x0) = �x0 f�ur positive x0negativ, f(x0) < 0, so dass die L�osung x(t) als Funktion der Zeit f�allt. F�urnegative x0 w�a hst sie als Funktion der Zeit, da hier f(x0) > 0. Damitmuss si h das System unabh�angig vom Anfangswert x0 f�ur lange Zeiten aufdie station�are L�osung x(t) = 0 zubewegen. Die station�are L�osung ist damitasymptotis h stabil.Ist dagegen � > 0, so ist f(x0) = �x0 f�ur positive x0 positiv, f(x0) > 0,so dass die L�osung x(t) als Funktion der Zeit w�a hst. F�ur negative x0 f�allt

13.1. QUALITATIVE ANALYSE VON DIFFERENTIALGLEICHUNGEN 181sie als Funktion der Zeit, da hier f(x0) < 0. Damit muss si h das Sy-stem unabh�angig vom Anfangswert x0 f�ur lange Zeiten von der station�arenL�osung x(t) = 0 wegbewegen. Die station�are L�osung ist damit instabil.Abh�angig vom Startwert divergiert die L�osung entweder gegen plus oderminus Unendli h.Diese Ergebnisse h�atten wir au h direkt an der L�osung x(t) = x0e�t able-sen k�onnen. Hier haben wir sie jedo h ohne jegli he Kenntnis dieser L�osungabgeleitet. Die St�arke dieses Ansatzes wird deutli h, wenn wir Di�erential-glei hungen studieren, f�ur die keine exakten L�osungen existieren.f(x) x(t)
txx x x
x
x
x2
1
asymptotischstabil
instabil
stabilasymptotisch
1 2
0
0
Abbildung 13.2: Qualitative Analyse einer gew�ohnli hen eindimensionalen Di�erential-glei hung ddtx(t) = f(x(t)): links der Graph von f(x), re hts L�osungen x(t) f�ur vers hie-dene Anfangsbedingungen x(0). Bea hten Sie, dass si h stabile und instabile station�areL�osungen abwe hseln!Aus dem bisher Gesagten folgt, dass bei gegebenem x die L�osung x(t) genau dannw�a hst, wenn f(x) positiv ist, und f�allt, wenn f(x) negativ ist. Daraus ergibt si hzwangsl�au�g, dass alle L�osungen als Funktion der Zeit monoton sein m�ussen (sie-he au h Abbildung 13.2). Insbesondere k�onnen damit in einer eindimensionalengew�ohnli hen Di�erentialglei hung keine Oszillationen auftreten! Dies w�urde jabedeuten, dass bei gegebenem Wert x(t) je na h der Phase der Oszillation die Ab-leitung ddtx(t) einmal positiv und einmal negativ ist. Die Ableitung hat jedo h na hGlei hung ddtx(t) = f(x(t)) bei gegebenem Wert x(t) nur genau einen Wert, n�amli hf(x(t)). Dieses wi htige Ergebnis impliziert, dass zur Modellierung von Oszillatio-nen mit Di�erentialglei hungen mindestens zwei dynamis hen Variablen x1(t) undx2(t) erforderli h sind. Dagegen k�onnen in Iterierten Abbildungen sehr wohl Os-zillationen in Systemen mit nur einer dynamis hen Variable auftreten. Siehe dazuau h no hmals Abbildung 7.1 auf Seite 87.SELBSTTEST: Diskutieren Sie den Grund f�ur diesen fundamentalen Unters hiedzwis hen Iterierten Abbildungen und Di�erentialglei hungen: Warum k�onnen in Ite-rierten Abbildungen wie der logistis hen Glei hung xt+1 = axt(1�xt) Oszillationenauftreten, ni ht jedo h in der auf den ersten Bli k sehr �ahnli hen Di�erentialglei- hung ddtx(t) = ax(t) � [1� x(t)℄?Wie aus Abbildung 13.2 ersi htli h ist, existieren zwei Klassen von station�arenL�osungen: Sol he, zu denen andere L�osungen hinstreben, und sol he, von denen siesi h wegbewegen. Erstere werden als asymptotis h stabil, letztere als instabil

182 KAPITEL 13. DIFFERENTIALGLEICHUNGENbezei hnet | siehe au h hierzu Kapitel 6 f�ur einen Verglei h mit Iterierten Abbil-dungen. Wie man aus der Abbildung ebenfalls ersieht, ist eine station�are L�osung x0genau dann asymptotis h stabil, wenn die Funktion f(x) f�ur wa hsendes x an derStelle x0 ihr Vorzei hen von plus zu minus we hselt, und instabil im umgekehrtenFall. Ist die Funktion an der Stelle x0 di�erenzierbar, so impliziert eine negativeAbleitung ddxf(x) asymptotis he Stabilit�at, eine positive Ableitung Instabilit�at:Satz (Stabilit�at station�arer L�osungen):Die Funktion f : x 7! f(x) habe eine Nullstelle x? und sei an der Stelle x? dif-ferenzierbar. Dann ist die station�are L�osung x(t) = x? der Di�erentialglei hungddtx(t) = f(x(t)) � asymptotis h stabil wenn dfdx ���x=x? < 0� instabil wenn dfdx ���x=x? > 0.Besitzt die Funktion f mehrere Nullstellen x?, ist sie auf dem gesamten be-tra hteten Intervall di�erenzierbar, und gilt an allen Nullstellen dfdx ���x=x? 6= 0,so we hseln si h instabile und asymptotis h stabile station�arer L�osungen ab.Qualitative Eigens haften einfa her dynamis her Systeme:Iterative Abbildungen erster Ordnungversus gew�ohnli he Di�erentialglei hungen erster OrdnungIterative Abbildung Di�erentialglei hungModellierung der Zeit diskrete S hritte kontinuierli h(t 2 N) (t 2 R)Dynamik x(t+ 1) = f(x(t)) ddtx(t) = f(x(t))L�osung ist eine Folge t 7! xt reelle Funktion t 7!x(t)Die L�osung� ist konstant wenn f(x?) = x? f(x?) = 0(Fixpunkt von f) (Nullstelle von f)� w�a hst an der Stelle x wenn f(x) > x f(x) > 0� f�allt an der Stelle x wenn f(x) < x f(x) < 0Periodis he L�osungen m�ogli h ja nein(`ja' ab DGL 2.Ordn.)Chaos m�ogli h ja nein(`ja' ab DGL 3.Ordn.)BEMERKUNG: Au h f�ur Systeme zweier gekoppelter Di�erentialglei hungen l�a�tsi h eine �ahnli he qualitative Analyse dur hf�uhren, wobei nun eine Reihe interes-santer neuer Ph�anomene auftreten k�onnen. So sind in zweidimensionalen SystemenOszillationen m�ogli h, jedo h kein Chaos | daf�ur sind bei einer Formulierung

13.2. L �OSUNG DURCH SEPARATION DER VARIABLEN 183mit Di�erentialglei hungen mindestens drei abh�angige Variable notwendig. Bei ei-ner Bes hreibung mit iterierten Abbildungen kann Chaos dagegen s hon in einemModell mit nur einer dynamis hen Variable entstehen, wie wir am Beispiel der Lo-gistis hen Glei hung in Kapitel 7 am Beispiel der Logistis hen Glei hung mit Hilfevon Computerdemonstrationen plausibel gema ht haben.13.2 L�osung einer Di�erentialglei hung erster Ord-nung dur h Separation der VariablenIm letzten Abs hnitt haben wir uns mit der qualitativen Analyse von Di�erential-glei hungen erster Ordnung der Formddtx(t) = f(x(t)) (13.12)bes h�aftigt, ohne jedo h ein Verfahren anzugeben, wie man diese Glei hungen expli-zit l�osen k�onnte. Eine wi htige Methode, die unter dem Namen \Separation derVariablen" oder \Trennung der Variablen" bekannt ist, soll nun vorgestelltwerden:Bildli h gespro hen sagt (13.12), dass si h x als Funktion der Zeit t gerade sover�andert, dass diese Ver�anderung dur h die Funktion f(x(t)) gegeben ist. Die Stei-gung der Tangente an die Funktion x(t) im Punkt t ist also genau dur h f(x(t))gegeben.Interpretieren wir nun die linke Seite von Glei hung (13.12) einen Moment lang alsQuotient zweier in�nitesimaler Gr�o�en | der Ver�anderung dx der Variablen x unddes zeitli hen Intervalls dt | so k�onnen wir au h s hreiben:dx = f(x) dt : (13.13)Diese Formel entspri ht exakt unserer Ans hauung der Tangente an die L�osung x(t):In jedem in�nitesimalen Intervall der L�ange dt �andert si h x gerade um dx = f(x)dt.Falls f(x) = 0, so impliziert (13.12) ddtx(t) = 0, also x = konstant. Wenn dagegenf(x) 6= 0, so dividieren wir die letzte Glei hung dur h f(x) und erhalten1f(x) dx = dt : (13.14)Na h diesem S hritt stehen alle Terme, die die Variable x enthalten, auf einer Seiteder Glei hung (13.14), alle Terme die die Variable t enthalten stehen auf der anderenSeite der Glei hung. Wir haben also die zwei Variablen voneinander getrennt | des-halb au h die Bezei hnung der Methode: Trennung der Variablen beziehungsweiseSeparation der Variablen.Wenn aber Glei hung (13.14) f�ur jeden beliebigen Zeitpunkt gilt, dann au h �ubereinen l�angeren Zeitraum hinweg, so dass wir die Glei hung von einem Anfangszeit-punkt t0 bis zu einem Endpunkt t1 integrieren d�urfen,Z x(t1)x(t0) 1f(x) dx = Z t1t0 dt = t1 � t0 : (13.15)Die Integrationsgrenzen x(t0) und x(t1) auf der linken Seite der Glei hung ergebensi h daraus, dass das System zur Zeit t0 den Wert x(t0) annimmt, und zur Zeit t1den Wert x(t1).
184 KAPITEL 13. DIFFERENTIALGLEICHUNGENSatz { L�osung der Di�erentialglei hung ddtx(t) = f(x(t)):Die Di�erentialglei hung ddtx(t) = f(x(t)) kann exakt gel�ost werden wenn eineStammfunktion der Funktion 1f(x) existiert. Die L�osung der Di�erentialglei hungergibt si h dann aus der Glei hungZ x(t1)x(t0) 1f(x) dx = t1 � t0 :Wir wollen dies an einem konkreten Beispiel illustrieren. Wir w�ahlen f(x) = �x,d.h. wir betra hten die lineare Di�erentialglei hung ddtx(t) = �x(t). Dabei wollenwir den trivialen Fall � = 0 auss hlie�en.F�ur � 6= 0 hat f(x) = �x genau eine Nullstelle x?, n�amli h x? = 0. F�ur x0 = x? = 0erhalten wir also eine station�are L�osung. Ist dagegen x0 6= 0, so m�ussen wir die Funk-tion (�x)�1 integrieren. Na h der Tabelle in Kapitel 12.4 ist eine Stammfunktionvon (�x)�1 dur h ��1 ln j�xj gegeben. Zur Vereinfa hung wollen wir im Folgendenx0 > 0 annehmen. Damit erhalten wir��1[ln(�x(t1))� ln(�x(t0))℄ = t1 � t0 : (13.16)Multiplizieren wir diese Glei hung mit � und verwenden die Identit�at ln a� ln b =ln(a=b) so erhalten wir ln�x(t1)x(t0)� = �(t1 � t0) : (13.17)Na h Exponentieren beider Seiten k�onnen wir die Glei hung na h x(t1) au �osen.Benennen wir t1 s hlie�li h no h in t um, so erhalten wirx(t) = x(t0) e �(t�t0) (13.18)in vollkommener �Ubereinstimmung mit dem heuristis hen Ergebnis in Kapitel 9.3.1.BEMERKUNG: Da in (13.15) die Integrationsgrenzen explizit eingehen, liegt dieIntegrationskonstante (siehe Kapitel 12) jetzt s hon (korrekt) mit x(t0) fest.Kann der hier vorgestellte Ansatz au h auf allgemeinere Di�erentialglei hungenangewendet werden? Betra hten wir dazu die Di�erentialglei hungddtx(t) = f(x)g(t) : (13.19)Im Gegensatz zu Glei hung (13.12) ist hier die zeitli he Ableitung von x(t) ni htdirekt dur h f(x) bestimmt, sondern dur h das Produkt von f(x) mit dem expli-zit zeitabh�angigen Faktor g(t). Als Beispiel f�ur eine derartige Di�erentialglei hungk�onnte die Ver�anderung der Gr�o�e x(t) einer Population dienen, deren Wa hstumf(x) dur h saisonale E�ekte g(t) wie beispielsweise das jahreszeitli h we hselndeFutterangebot moduliert wird.Zur L�osung von (13.19) formen wir wie bei Glei hung (13.12) in Gedanken um,dx = f(x)g(t)dt ; (13.20)dividieren wieder dur h f(x), dxf(x) = g(t)dt ; (13.21)

13.3. WEITERE DIFFERENTIALGLEICHUNGSTYPEN 185und erhalten nun Z x(t1)x(t0) 1f(x) dx = Z t1t0 g(t)dt : (13.22)Die Bere hnung der L�osung ist dur h das Integral auf der re hten Seite von (13.22)komplizierter geworden, konzeptionell hat si h jedo h gegen�uber (13.15) ni hts ge�an-dert!BEISPIEL : Die Di�erentialglei hung ddtx(t) = �x(t)tDie Abnahme eines Sto�es sei explizit von der Zeit abh�angig, und zwargem�a� der Di�erentialglei hung ddtx(t) = �x(t)t . Hierbei m�ussen wir t > 0voraussetzen, da die re hte Seite der Di�erentialglei hung zur Zeit t = 0ni ht de�niert ist.Verglei hen wir die Di�erentialglei hung mit (13.19) so sehen wir, dass dieFunktionen f(x) und g(t) nun dur h f(x) = x und g(t) = �t�1 gegebensind. Glei hung (13.22) lautet also nunZ x(t1)x(t0) x�1 dx = � Z t1t0 t�1 dt (13.23)woraus wir ln x(t1)x(t0) = � ln t1t0 = ln t0t1 (13.24)erhalten. Ausgewertet zur Zeit t ergibt si h die allgemeine L�osung x(t) = Ct .Aus dem Wert x(t0) von x zur Zeit t0 folgt s hlie�li h die spezielle L�osungx(t) = t0�x(t0)t .SELBSTTEST: Bere hnen Sie zur Probe die Ableitung von x(t) und �uber-pr�ufen Sie damit, dass die angegebene Funktion die Di�erentialglei hungerf�ullt.13.3 Weitere Di�erentialglei hungstypen13.3.1 Gekoppelte Di�erentialglei hungenModelle mit mehreren Variablen, beispielsweise �okologis he Systeme mit einer Beu-tepopulation x1 und einer R�auberpopulation x2 f�uhren zu gekoppelten Di�eren-tialglei hungen wie dem Lotka-Volterra System:dx1dt = �x1 � �x1x2 ; (13.25)dx2dt = x1x2 � Æx2 (13.26)mit �; �; ; Æ > 0.Die Analyse und biologis he Interpretation derartiger Glei hungen wird im Detailin der Vorlesung \Theoretis he Biologie A" (fakultative Veranstaltung im drittenSemester) behandelt.SELBSTTEST: Diskutieren Sie die biologis he Grundlage dieser beiden Di�eren-tialglei hungen! Gehen Sie dabei von der Ihnen s hon bekannten Dynamik (13.8)

186 KAPITEL 13. DIFFERENTIALGLEICHUNGENaus und versu hen Sie, die Bedeutung der Parameter � bis Æ zu ers hlie�en! SetzenSie dazu in einem ersten S hritt � = = 0. Wel he Populationsdynamik bes hreibtdieses vereinfa hte Modell? Wel he Population stirbt aus, wel he w�a hst? (Sieheau h den Abs hnitt 9.3.1!) Erweitern Sie das Modell nun in einem zweiten S hritt,indem Sie � > 0 zulassen. Was bedeutet dieser zus�atzli he Term f�ur die zeitli heEntwi klung der Beutepopulation? Wel hen E�ekt hat er f�ur die R�auberpopulati-on? Wie interpretieren Sie diesen Term biologis h? Im letzten S hritt sei nun au h > 0. Wel hen E�ekt hat dies auf die R�auberpopulation?13.3.2 Di�erentialglei hungen h�oherer OrdnungIn den bisherigen Beispielen treten nur erste Ableitungen der abh�angigen Variablenx na h der unabh�angigen Variablen (hier: die Zeit t) auf. Die Glei hungen werdendeshalb Di�erentialglei hungen erster Ordnung genannt. Im Gegensatz dazuist die aus der Physikvorlesung bekannte Di�erentialglei hung einer ged�ampftenS hwingung, m d2dt2 x(t) + ddtx(t) = �kx(t) ; (13.27)eine Di�erentialglei hung zweiter Ordnung, da eine zweite Ableitung auf-tau ht.5 Verallgemeinernd ist die Ordnung einer Di�erentialglei hung dur h denGrad der h�o hsten Ableitung gegeben.BEISPIEL :Im Beispiel der Fallgesetze zu Beginn dieses Kapitels verste kt si h ebenfallseine Di�erentialglei hung zweiter Ordnung: Da die Ges hwindigkeit v(t) dieerste Ableitung ddtx(t) des Ortes na h der Zeit ist, kann Glei hung (13.4)au h als d2dt2 x(t) = g (13.28)ges hrieben werden. Ganz allgemein lautet das Newtons he Gesetz (13.3)f�ur konstante Massen F = m d2dt2x(t) (13.29)und ergibt dann bei vorgegebener ortsabh�angiger Kraft F = F (x) die Be-wegungsglei hung d2dt2 x(t) = F (x(t))m ; (13.30)also eine Di�erentialglei hung zweiter Ordnung. Wegen des Newtons henGesetzes spielen derartige Di�erentialglei hungen eine zentrale Rolle in der\klassis hen" oder \Newtons hen" Me hanik. Im Gegensatz dazu ist dieBewegungsglei hung der Quantenme hanik, die sogenannte S hr�odinger-glei hung, eine Di�erentialglei hung erster Ordnung.F�ur eine Di�erentialglei hung erster Ordnung ben�otigt man eine Anfangsbedinung,um die spezielle L�osung festzulegen. F�ur eine Di�erentialglei hung n-ter Ordnungwerden n Anfangsbedingungen ben�otigt um das System eindeutig zu harakteri-sieren. Dies sieht man f�ur den Fall n = 2 an Glei hung (13.27): Diese Glei hungverkn�upft drei Gr�o�en: d2dt2x(t), ddtx(t) und x(t). Damit die Glei hung gel�ost werdenkann, m�ussen zwei dieser Gr�o�en vorgegeben sein, zum Beispiel dxdt ��t=0 und x(0).5In ihrer physikalis hen Interpretation bes hreibt (13.27) die Bewegung eines Federpendel mitMasse m, Reibungskonstante und Federkonstante k. Die Gr�o�e x bezei hnet die Auslenkung desPendels aus seiner Ruhelage.

13.3. WEITERE DIFFERENTIALGLEICHUNGSTYPEN 187Di�erentialglei hungen n-ter Ordnung kann man dur h Variablentransformation aufein �aquivalentes System von n gekoppelten Di�erentialglei hungen erster Ordnungtransformieren. Dies soll am Beispiel (13.27) verdeutli ht werden. De�niert manv(t) = ddtx(t), so gilt d2dt2x(t) = ddtv(t), und man erh�alt ein System von zwei gekop-pelten Di�erentialglei hungen,m ddtv(t) + v(t) + kx(t) = 0 (13.31)und ddtx(t) � v(t) = 0 : (13.32)Verglei hen Sie dieses Vorgehen au h mit der Formulierung der Fallgesetze zu Beginndieses Kapitels.Entspre hend de�niert man f�ur eine Di�erentialglei hung n-ter Ordnung xn(t) =dn�1x=dtn�1 und erh�alt damit ein System von n gekoppelten Di�erentialglei hungenf�ur die dynamis hen Variablen x1(t) bis xn(t).Je na h Anwendung wird man eine der beiden alternativen Bes hreibungen (13.27)oder (13.31)/(13.32) vorziehen. Weiterhin verdeutli ht die �Aquivalenz, dass Syste-me, die auf den ersten Bli k vollkommen unters hiedli hen Bewegungsgesetzen zugehor hen s heinen, unter Umst�anden identis he dynamis he Eigens haften besit-zen.13.3.3 Partielle Di�erentialglei hungenIn vielen biologis h relevanten Problemen wie beispielsweise der Di�usion eines bio- hemis hen Botensto�es betra htet man dynamis he Variablen, die von Zeit undOrt abh�angen. Wird der Botensto� an einer bestimmten Stelle (x0; y0; z0) zur Zeitt0 ausges h�uttet, so ist seine Konzentration an dieser Stelle anfangs ho h. Im Laufder Zeit wird die Konzentration dort absinken, w�ahrend sie an bena hbarten Or-ten erst ansteigt, um dann sp�ater au h dort abzufallen, wenn si h der Sto� weiterverd�unnt. In diesem Beispiel sind au�er der Zeit t au h die Ortsvariablen (x; y; z)unabh�angige Variable. Die abh�angige Variable, die Konzentration � des Botensto�esist eine Funktion dieser vier Variablen, � = �(x; y; z; t).Die zeitli he �Anderung von � an einer festen Stelle (x; y; z) h�angt davon ab, wiestark an dieser Stelle die r�aumli hen Konzentrationsunters hiede sind, wie gro� al-so die r�aumli he Ableitung von � ist. Bei der mathematis hen Bes hreibung vonDi�usionsprozessen treten deshalb sowohl zeitli he als au h r�aumli he Ableitungenauf, was auf sogenannte partielle Di�erentialglei hungen f�uhrt, die wir in einemsp�ateren Kapitel betra hten werden. Partielle Di�erentialglei hungen sind au h f�urdas Studium vieler anderer raum-zeitli her Ph�anomene wi htig, wie der Musterbil-dung in der Entwi klungsbiologie, der Ausbreitung von Aktionspotentialen in derNeurobiologie, oder der We hselwirkung vers hiedener Arten in der �Okologie undEvolutionsbiologie.Vorerst werden wir uns jedo h auf Di�erentialglei hungen mit nur einer unabh�angi-gen Variable bes hr�anken. Derartige Di�erentialglei hungen werden gew�ohnli heDi�erentialglei hungen genannt. Da wir in Kapitel 13 und 14 auss hlie�li hgew�ohnli he Di�erentialglei hungen betra hten, verwenden wir eine vereinfa hteNotation und verstehen in diesen zwei Kapiteln unter dem Ausdru k \Di�eren-tialglei hung" immer eine \gew�ohnli he Di�erentialglei hung".

188 KAPITEL 13. DIFFERENTIALGLEICHUNGEN13.4 Ausbli k13.4.1 Eindeutigkeit von L�osungenZei hnen die Anfangsbedingungen immer genau eine L�osung aus? Anders gefragt:Kann man aus einer Anfangsbedingung immer das zuk�unftige Verhalten eines Sy-stems voraussagen, oder kann es au h ges hehen, dass si h aus einer Anfangsbedin-gung mehrere vers hiedene L�osungen entwi keln?In der Tat kann man zeigen, dass Di�erentialglei hungen der Form ddtx(t) = f(x(t))eindeutige L�osungen haben, wenn ddxf(x)��x0 f�ur alle x0 bes hr�ankt ist. Wir werdendies im Rahmen dieser Vorlesung jedo h ni ht beweisen.SELBSTTEST: Betra hten Sie als Gegenbeispiel die Di�erentialglei hung ddtx(t) =px(t) mit der Anfangsbedingung x(0) = 0. Dieses Beispiel ist ni ht biologis hmotiviert und wurde allein deshalb gew�ahlt, weil die Ableitung von px f�ur x !0 divergiert. L�osen Sie diese Glei hung dur h Separation der Variablen. Wel hezweite, einfa he (konstante!) L�osung hat die Di�erentialglei hung no h? Spri htetwas dagegen, beide Arten von L�osung zu einer neuen L�osung zu kombinieren?Was folgt daraus f�ur die Ein- beziehungsweise Mehrdeutigkeit der L�osungen derDi�erentialglei hung?Als einen zur Separation der Variablen alternativen Weg k�onnen Sie au h denL�osungsansatz x(t) = a(t � )q mit a; 2 R f�ur t > > 0 zum AuÆnden derni ht-trivialen L�osung versu hen. Setzen Sie daf�ur den Ansatz in die linke und re h-te Seite von ddtx(t) = px(t) ein, und fordern Sie, dass er f�ur alle Zeiten t gelte.Was folgt daraus f�ur die Parameter q, a und ? Wel he dieser Gr�o�en sind jetztno h unbestimmt, wel he eindeutig festgelegt? Was bedeutet dies f�ur die m�ogli henL�osungen der Di�erentialglei hung?Die Mehrdeutigkeit von L�osungen verletzt den Determinismus der klassis hen Phy-sik { \identis he Anfangsbedingungen erzeugen identis he L�osungen". Es ist des-halb kein Wunder, dass in physikalis hen Problemen Anfangsbedingungen eindeuti-ge L�osungen auszei hnen. In ph�anomenologis hen Modellen kann es dagegen lei ht\passieren", dass eine Di�erentialglei hung mehrdeutige L�osungen zul�a�t. Man soll-te das zugrundeliegende Modell dann aber daraufhin untersu hen, wel he mikrosko-pis hen Annahmen zur L�osungsmehrdeutigkeit f�uhren. Oft wird man dabei intrinsi-s he Grenzen des Modells erkennen. Bei der Modellierung von Populationsdynami-ken darf man beispielsweise nur bei gro�en Populationen von einer kontinuierli henPopulationsgr�o�e ausgehen: Die Zeitentwi klung einer Population mit zwei oder dreiIndividuen kann ni ht dur h eine Di�erentialglei hung f�ur die Populationsgr�o�e be-s hrieben werden | hier w�are vielmehr eine Iterierte Abbildung wie das Model vonFibona i in Kapitel 6.2.4 angebra ht | bei einer Population von mehreren hundertIndividuen kann man dagegen ohne gro�e Fehler eine reellwertige Populationsgr�o�eannehmen.13.4.2 Fortsetzbarkeit von L�osungenWir haben bis jetzt stills hweigend angenommen, dass f�ur jede Di�erentialglei hungL�osungen existieren und f�ur beliebige Zeiten fortgesetzt werden k�onnen. Dies mussaber ni ht so sein:

13.4. AUSBLICK 189SELBSTTEST: Betra hten Sie die (harmlos wirkende) Di�erentialglei hung ddtx(t) =[x(t)℄2 mit der Anfangsbedingung x(0) = 1, die als sehr einfa hes Modell einer bi-molekularen autokatalytis hen Reaktion aufgefa�t werden kann | das Anwa hsender Substanz x geht umso s hneller vonstatten, je mehr Substanz s hon vorhandenist; da je zwei Molek�ule miteinander reagieren, h�angt die Reaktionsges hwindigkeitquadratis h von x ab. L�osen Sie die Di�erentialglei hung wieder dur h Separationder Variablen. Alternativ dazu k�onnen sie wie im letzten Selbsttest einen ad-ho L�osungsansatz der Form x(t) = ( � t)n versu hen und daraus n und bestimmen.Diskutieren Sie die L�osung und untersu hen Sie dabei vorallem, ob die L�osung be-s hr�ankt ist!Wie bei der Mehrdeutigkeit von L�osungen gilt au h f�ur Fragen na h der Existenz vonL�osungen, dass \unphysikalis he" Ph�anomene im Allgemeinen auf die Grenzen desbetra hteten Modells hinweisen, und dann direkt zu besser motivierten Ans�atzenf�uhren. So m�u�te im obigen Modell die Endli hkeit der Resour en in die Modellie-rung einbezogen werden. Der Ausdru k x2 m�u�te also dur h eine Funktion ersetztwerden, die f�ur gro�e x gegen Null geht, so dass die L�osung ni ht mehr in endli herZeit divergiert.13.4.3 Numeris he Integration von Di�erentialglei hungenWie kann man si h die Integration einer Di�erentialglei hung ans hauli h vorstel-len? Eine Di�erentialglei hung wie (13.8) gibt an, wie gro� ddtx(t) f�ur gegebenesx(t) ist. Sobald man also die Anfangsbedingung x0 zur Zeit t = 0, x0 = x(0) kennt,kann man dxdt ��t=0 bere hnen und wei� damit, wie stark si h x(t) zur Zeit t = 0�andert. Einen in�nitesimal kleinen Zeits hritt � sp�ater, zur Zeit t = �, wird dannin linearer N�aherung x(�) � x0 + � dxdt ��t=0 gelten. Mit diesem Wert f�ur x kannman nun mit Hilfe der Di�erentialglei hung den Wert dxdt ��t=� bere hnen, und da-mit x(2�) � x(�) + � dxdt ��t=�, daraus na h dem glei hen Muster dxdt ��t=2� und damitx(3�) � x(2�) + � dxdt ��t=2� et . Man n�ahert also die dur h die Di�erentialglei hungbes hriebene Dynamik dur h eine Iterierte Abbildung an, in der die exakte L�osung
0
1
2
3
4
5
6
7
8
0 0.5 1 1.5 2t
x
et
∆t = 0.2
∆t = 1.0
Abbildung 13.3: Numeris he L�osung der Di�erentialglei hung dx=dt = x. Die analytis heL�osung x(t) = ex wird dur h das Euler-Verfahren mit abnehmender S hrittweite �t immerbesser approximiert.

190 KAPITEL 13. DIFFERENTIALGLEICHUNGENdur h eine st�u kweise geradlinige Kurve ersetzt wird. Diese Methode wird Euler-Verfahren genannt. Die Approximation wird umso besser sein, je kleiner � gew�ahltwird, und s hlie�li h beliebig nahe an die eigentli he L�osung der Di�erentialglei- hung kommen. Allerdings gibt es au h F�alle, in denen dieses Verfahren ni ht zurkorrekten L�osung konvergiert. Dies kann beispielsweise ges hehen, wenn f(x) ni htstetig ist.Bei der numeris hen Integration von Di�erentialglei hungen wird im Prinzip dasglei he Verfahren der Diskretisierung eines kontinuierli hen Prozesses verwendet.Heutige Integrationsroutinen ben�utzen jedo h ni ht das Euler-Verfahren, sondernapproximieren die L�osungskurve dur h Polynome h�oheren Grades, womit si h dieKonvergenzeigens haften verbessern und der Re henaufwand deutli h f�allt. Au hwird oft ni ht mit fester S hrittweite � gearbeitet. Die S hrittweise wird vielmehradaptiv an die Dynamik angepa�t, um so Berei he, in denen die L�osung stark va-riiert, mit h�oherer Genauigkeit abzutasten und damit die G�ute des Verfahrens zuerh�ohen ohne in Berei hen, in denen si h die L�osung nur langsam �andert, Re henzeitzu vers hwenden.Moderne te hnis he und wissens haftli he Fragestellungen f�uhren oft zu ni htlinea-ren Systemen mit vielen gekoppelten Di�erentialglei hungen, die ni ht mehr analy-tis h integriert werden k�onnen. Numeris he Methoden zur Integration von Di�eren-tialglei hungen spielen deshalb in diesen Berei hen eine wi htige Rolle und bildendaher au h einen S hwerpunkt der Numeris hen Mathematik.13.5 Aufgaben1. (Di�erentialglei hung) Wir betra hten die Di�erentialglei hungddtx(t) = �x3 + 4x(a) Ma hen Sie si h ein Bild von der Funktion f(x) = �x3 + 4x. F�uhren Siedazu eine kurze Kurvendiskussion dur h: Verhalten f�ur x ! �1, Symmetrie,Nullstellen, 1. Ableitung und Extremstellen, Skizze.(b) Wie lauten die station�aren L�osungen der Di�erentialglei hung?( ) �Uberlegen Sie si h mit Hilfe der Skizze von f(x), wie die L�osungen x(t) der Dif-ferentialglei hung qualitativ aussehen werden. Sind die station�aren L�osungenstabil oder instabil? Skizzieren Sie die L�osungen x(t) mit den Anfangswertenx0 = �4;�1; 1; 4.(d) Wiederholen Sie die Aufgabenteile (a) bis ( ) f�ur die Di�erentialglei hungddtx(t) = x3 � 4x und f(x) = x3 � 4x :2. (Di�erentialglei hungen) Gegeben ist folgende Di�erentialglei hung:ddtx(t) = �2t � x(a) Wie unters heidet sie si h prinzipiell von denen aus der vorherigen Aufgabe?(b) Geben Sie die station�are L�osung der Di�erentialglei hung an, falls eine existiert.

13.5. AUFGABEN 191( ) Wie hei�t das Verfahren um eine sol he Di�erentialglei hung zu l�osen?(d) Bere hnen Sie die allgemeine L�osung der Di�erentialglei hung!(e) Skizzieren Sie die L�osung f�ur t � 0 und f�ur zwei vers hiedene Werte von x0 =x(0).3. (Di�erentialglei hungen) Aus dem Wintersemester kennen Sie die logistis heDi�erentialglei hung dxdt = ax� bx2 (13.33)als Modell f�ur eine Population mit begrenztem Wa hstum. L�osen Sie nun die Glei- hung (13.33) f�ur beliebige Anfangspopulationen, d.h. zur Zeit t0 sei x(t0) = x0.Gehen Sie dazu wie folgt vor:(a) Formen Sie die Glei hung dur h Trennung der Variablen in einen Integralaus-dru k um.(b) Bere hnen Sie das Integral �uber x mit Hilfe der Substitution y = 1=x . Waserhalten Sie damit letztendli h f�ur x(t)?( ) Diskutieren Sie die Funktionx(t) = ab� �b� ax0� exp[�a(t� t0)℄ (13.34)f�ur Zeiten t � t0 . Was ergibt si h im Grenzfall b = 0?

192 KAPITEL 13. DIFFERENTIALGLEICHUNGEN

Kapitel 14LineareDi�erentialglei hungenZwei f�ur die Biologie wi htige Prozesse werden dur h die s hon mehrfa h erw�ahnteDi�erentialglei hung ddtx(t) = �x(t) (14.1)bes hrieben: exponentielles Wa hstum (f�ur � > 0) und exponentieller Zerfall (f�ur� < 0). Diese gew�ohnli he Di�erentialglei hung erster Ordnung ist au h das einfa h-ste Beispiel einer linearen Di�erentialglei hung, das hei�t einer Di�erentialglei- hung, in der die abh�angige Variable | hier die Variable x| und ihre Ableitung(en)| hier ddtx(t) | nur in der ersten Potenz auftritt.Die einfa hste lineare Di�erentialglei hung zweiter Ordnung ist die Di�erentialglei- hung d2dt2x(t) = �!2x(t) :Die L�osungen dieser Glei hung sind dur h x(t) = A sin(!t + �) mit A; � 2 Rgegeben, also Sinus-S hwingungen mit Periode P = 2�! . Siehe au h Kapitel 10.2.6.Beide Beispiele demonstrieren die gro�e Bedeutung linearer Di�erentialglei hun-gen bei der Bes hreibung von einfa hen Wa hstums-, Zerfalls- und S hwingungs-vorg�angen. Lineare Di�erentialglei hungen spielen dar�uber hinaus aus mindestenszwei weiteren Gr�unden eine ents heidende Rolle in den Natur- und Ingenieurwis-sens haften. Betra htet man n�amli h ein dynamis hes System in der N�ahe einesGlei hgewi htszustandes (station�arer Punkt), so gen�ugt es oft, die auf das Systemeinwirkenden Kr�afte in linearer N�aherung (erstes Glied der Taylorentwi klung) zubetra hten: Am station�aren Punkt selbst heben si h alle auf das System einwirken-den Kr�afte gerade gegenseitig auf (sonst w�are es kein station�arer Punkt), in seinerN�ahe w�a hst die Gesamtkraft proportional zur Auslenkung von der Glei hgewi hts-lage an, ist also eine lineare Funktion. Damit ist jedo h na h De�nition au h dieresultierende Di�erentialglei hung eine lineare Di�erentialglei hung.Zweitens existiert f�ur lineare Di�erentialglei hungen eine ges hlossene und relativeinfa he L�osungstheorie. Um einen ersten Einbli k in die Dynamik eines no h un-verstandenen Systems zu erhalten, reduziert man deshalb gerne die Bewegungsglei- hungen des Systems zu linearen Di�erentialglei hungen und studiert zuerst diese,bevor man si h im Detail mit dem Ausgangsproblem auseinandersetzt. Dieses Vor-193

194 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENgehen ist Ihnen au h aus der Physik bekannt, wo Sie beispielsweise die Bewegungeines Fadenpendels unter der Annahme bere hnet haben, dass die R�u kstellkraftproportional zur Auslenkung w�a hst, obwohl o�ensi htli h ist, dass diese N�ahe-rung nur f�ur kleine Winkel korrekt sein kann, und f�ur gro�e Winkel si her ni htgilt: sonst k�onnte es keinen �Ubers hlag des Pendels geben. Trotz dieser o�ensi htli- hen M�angel bes hreibt die N�aherungsl�osung die physikalis he Realit�at zumindestf�ur kleine Auslenkungen erstaunli h gut, und stellt den Wert dieses pragmatis henVorgehens unter Beweis.Aus beiden genannten Gr�unden wollen wir uns nun im Detail mit linearen Di�erenti-alglei hungen auseinandersetzen. Am Beispiel gew�ohnli her Di�erentialglei hungen,in denen die Zeit t als unabh�angige, die Me�gr�o�e x als abh�angige Variable ers heint,wollen wir zuerst die allgemeine Form einer linearen Di�erentialglei hung angebenund ans hlie�end vers hiedene Wege zu ihrer L�osung diskutieren.Zur Vereinfa hung werden wir uns vor allem mit Di�erentialglei hungen erster Ord-nung befassen. S�atze und De�nitionen, die au h f�ur Di�erentialglei hungen h�ohererOrdnung gelten, werden entspre hend kommentiert.De�nition (Lineare Di�erentialglei hung erster Ordnung):Eine gew�ohnli he Di�erentialglei hung erster Ordnung mit t als unabh�angigerund x als abh�angiger Variable hei�t linear, wenn sie auf die Formddtx(t) = g(t)x(t) + h(t) (14.2)gebra ht werden kann.
BEMERKUNG: Die Funktionen g(t) und h(t) h�angen in (14.2) von der Zeit t ab,jedo h ni ht von x. Diese Situation ist konzeptionell deutli h von einer Situationzu unters heiden, in der eine Abh�angigkeit der re hten Seite von (14.2) vom Zu-stand x(t) des Systems zur Zeit t vorliegt, die ni ht als g(t)x(t) + h(t) ges hriebenwerden kann, wenn also beispielweise statt h(t) ein Ausdru k der Gestalt h(x(t))auftau ht. Ein Beispiel zur Illustration: Die Di�erentialglei hung ddtx(t) = [x(t)℄2ist ni ht linear, da die abh�angige Variable x quadratis h eingeht. Dagegen ist dieDi�erentialglei hung ddtx(t) = t2x(t) linear, da zwar die unabh�angige Variable tquadratis h eingeht, ni ht aber die abh�angige Variable x.BEMERKUNG: Ist die Funktion g identis h Null, hat also Glei hung (14.2) dieForm ddtx(t) = h(t), ist die L�osung besonders einfa h. Bezei hnet n�amli h H eineStammfunktion von h und x0 den Wert von x zur Zeit t = 0, so gilt x(t) = H(t) +x0�H(0), wie si h dur h Einsetzen beziehungsweise Di�erenzieren ras h best�atigt.BEMERKUNG: Au h Di�erentialglei hungen h�oherer Ordnung oder gekoppelteDi�erentialglei hungen werden genau dann lineare Di�erentialglei hungen genannt,wenn sie in den abh�angigen Variablen und deren Ableitungen linear sind.

195De�nition (Homogene und inhomogene lineare Di�erentialglei hungerster Ordnung):Tritt der Term h(t) in (14.2) ni ht auf, hat die Di�erentialglei hung also dieForm ddtx(t) = g(t)x(t); (14.3)so wird sie als homogene Di�erentialglei hung bezei hnet.Tritt der Term h(t) jedo h auf, so hei�t die Di�erentialglei hung inhomogen.BEMERKUNG: Au h bei linearen Di�erentialglei hungen h�oherer Ordnung kannman na h analogen Kriterien zwis hen homogenen und inhomogenen Glei hungenunters heiden.Satz und De�nition (Zusammenhang zwis hen homogenen und inho-mogenen linearen Di�erentialglei hungen):Zu jeder inhomogenen Di�erentialglei hung (14.2) kann man eine homogeneDi�erentialglei hung (14.3) erzeugen, indem man die Funktion h(t) wegl�asst(Null setzt). Diese Di�erentialglei hung hei�t au h die der Glei hung (14.2)zugeordnete homogene Di�erentialglei hung.Falls g(t) und h(t) konstante Funktionen sind so nennt man (14.2) au h einelineare Di�erentialglei hung erster Ordnung mit konstanten KoeÆzi-enten.F�ur homogene lineare Di�erentialglei hungen gilt wie f�ur homogene lineare IterierteAbbildungen (siehe Kapitel 6.1.1) das Superpositionsprinzip:Satz (Superpositionsprinzip):Seien x1(t) und x2(t) zwei L�osungen der homogenen linearen Di�erentialglei- hung (14.3), ddtx(t) = g(t)x(t) :Dann ist au h jede Linearkombination y(t) von x1(t) und x2(t),y(t) = �x1(t) + �x2(t) mit �; � 2 Ceine L�osung von (14.3).Beweis:Na h der Voraussetzung des Satzes wird (14.3) von x1(t) und x2(t) erf�ullt. Will manalso �uberpr�ufen, ob dies au h f�ur y(t) zutri�t, so bere hne man ddty(t):ddt y(t) = � ddt x1(t) + � ddt x2(t)= �g(t)x1(t) + �g(t)x2(t)= g(t)[�x1(t) + �x2(t)℄ = g(t)y(t) : (14.4)Die Linearkombination y(t) = �x1(t) + �x2(t) erf�ullt also in der Tat (14.3). 2BEMERKUNG: Das Superpositionsprinzip gilt in glei her Weise au h bei linea-ren Di�erentialglei hungen h�oherer Ordnung und ist deshalb au h von fundamen-taler Bedeutung in der Physik | viele Bewegungsglei hungen sind ja (zumindestn�aherungsweise) linear, siehe au h die Einleitung zu diesem Kapitel. Studiert man

196 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENbeispielsweise die Bewegung eines s hr�ag abgeworfenen Balles, so kann man seinehorizontale und vertikale Bewegung getrennt untersu hen. Unter der Annahme ver-s hwindender Reibung wird die Ges hwindigkeit in horizontaler Ri htung konstantsein, die in vertikaler Ri htung ist in jedem Moment identis h mit der Ges hwindig-keit eines senkre ht mit glei her vertikaler Ausgangsges hwindigkeit ho hgeworfe-nen Balles und wurde in Kapitel 13 s hon bere hnet. Die vektorielle Superpositionbeider Bewegungen ergibt dann die wahre Bewegung.
0 1 20
1
2
3
4
5
6
t [s]
y(t)
[m]
0 10 200
1
2
3
4
5
6
x [m]
y(x)
[m]
Abbildung 14.1: Eine Illustration zum Superpositionsprinzip. Links ist die H�ohe y einesmit einer Ausgangsges hwindigkeit von 10 Metern pro Sekunde senkre ht na h oben ge-worfenen Balls als Funktion der Zeit t aufgetragen. Re hts ist die H�ohe y eines mit einerAusgangsges hwindigkeit von p2 � 10 Meter pro Sekunde und einem Winkel von �=4 (450)na h oben geworfenen Balls als Funktion des Ortes x aufgetragen. Im zweiten Fall betragenalso zum Zeitpunkt des Abwurfs Horizontal- und Vertikalges hwindigkeit jeweils gerade 10Metern pro Sekunde. Na h dem Superpositionsprinzip ist die Bewegung in vertikaler Ri h-tung identis h mit der des senkre ht na h oben geworfenen Balls. Da wir die Luftreibungverna hl�assigen wollen, ist die Ges hwindigkeit in horizontaler Ri htung konstant. Daherist der in horizontaler Ri htung zur�u kgelegte Weg proportional zur Zeit, so dass man aufder Abszisse statt x au h t (mit der ri htigen Skalierung) h�atte auftragen k�onnen, 10 Meterh�atten dabei genau einer Sekunde entspro hen. Da die Bewegung in vertikaler Ri htungin beiden dargestellten F�allen glei h gro� ist, ergeben si h zwei in ihrer Form identis heKurven. Konzeptionell sind diese jedo h klar zu unters heiden: links ist eine Trajektoriedargestellt, also \Ort als Funktion der Zeit", re hts ein Orbit (oder au h: Bahnkurve), alsodie Menge aller w�ahrend der Bewegung eingenommenen Punkte im Raum.14.1 Homogene Di�erentialglei hungen:L�osung dur h Separation der VariablenZur L�osung der homogenen linearen Di�erentialglei hung erster Ordnung (14.3)kann man die aus Kapitel 13.2 bekannte Methode der \Separation der Variablen"verwenden. Diese hat nun eine besonders elegante Form, da na h (14.3) f�ur die

14.2. INHOMOGENE GLEICHUNGEN: VARIATION DER KONSTANTEN 197Funktion f(x) in Glei hung (13.19) gilt: f(x) = x. Damit vereinfa ht si h Glei hung(13.22) zu Z x(t1)x(t0) 1x dx = Z t1t0 g(t)dt : (14.5)Die linke Seite kann direkt integriert werden und wir erhaltenln x(t1)x(t0) = Z t1t0 g(t)dt ; (14.6)was na h Exponentieren beider Seiten aufx(t1) = x(t0) exp �Z t1t0 g(t)dt� (14.7)f�uhrt.Ist also eine Stammfunktion von g bekannt, so kann die homogene Di�erentialglei- hung explizit gel�ost werden.14.2 Inhomogene Di�erentialglei hungen:L�osung dur h Variation der KonstantenBei inhomogenen linearen Di�erentialglei hungen erster Ordnung kann dieser Zu-gang jedo h ni ht mehr angewendet werden, da bei der Division von (14.2) dur h xder Term h(t)=x entsteht { die zwei Variablen t und x k�onnen also ni ht erfolgrei hsepariert werden. Falls wir jedo h die L�osung der homogenen Di�erentialglei hung(14.3) kennen, die wir mit xh(t) bezei hnen wollen, hilft folgender Gedanke weiter:Wir setzen die L�osung x(t) der inhomogenen Glei hung (14.3) als das Produkt vonxh(t) mit einer no h unbestimmten Funktion z(t) an,x(t) = z(t)xh(t) : (14.8)Dann gilt na h der Produktregel (9.7)ddtx(t) = dz(t)dt � xh(t) + z(t) � dxh(t)dt : (14.9)Fordern wir nun, dass x(t) die inhomogene Glei hung (14.2) erf�ullt, so erhalten wirdz(t)dt xh(t) + z(t)dxh(t)dt = g(t)x(t) + h(t) : (14.10)Da na h Voraussetzung x(t) = z(t)xh(t) und ddtxh(t) = g(t)xh(t) folgt aus derletzten Glei hungdz(t)dt xh(t) + z(t)g(t)xh(t) = g(t)z(t)xh(t) + h(t) (14.11)oder dz(t)dt xh(t) = h(t) : (14.12)

198 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENF�ur alle Zeiten t, f�ur die die L�osung der homogenen Glei hung ni ht vers hwindet,xh(t) 6= 0, kann (14.12) na h ddtz(t) aufgel�ost werden,ddtz(t) = h(t)xh(t) : (14.13)Da na h Voraussetzung die homogene L�osung xh(t) bekannt ist, und die Funktionh(t) vorgegeben war, haben wir somit eine Di�erentialglei hung f�ur z(t) erhalten.Existiert eine Stammfunktion zu h(t)=xh(t), so k�onnen wir z(t) bestimmen, undhaben damit na h Glei hung (14.8) die gesu hte L�osung x(t) der inhomogenen Dif-ferentialglei hung (14.2) gefunden!Wegen des Superpositionsprinzips kann jede spezielle L�osung einer homogenen li-nearen Di�erentialglei hung mit einer Konstanten multipliziert werden und ist dannimmer no h eine L�osung dieser Di�erentialglei hung. Der Ansatz (14.8) beruht nungerade darauf, diese Konstante zu variieren, was zur Bezei hnung \Variation derKonstanten" gef�uhrt hat.SELBSTTEST: Versu hen Sie, diesen Ansatz au h auf ni htlineare Di�erentialglei- hungen der Form ddtx(t) = g(t)f(x(t)) + h(t) zu �ubertragen. Warum gelingt diesni ht?BEISPIEL : Aufnahme und Abbau eines MedikamentsEin Medikament werde in Tablettenform verabrei ht. Es gelangt dann �uberden Magen in den Blutkreislauf des Patienten. Dort wird es langsam ab-gebaut und verliert mit der Zeit seine Wirkung. Wie entwi kelt si h die imBlut gemessene Medikamentenkonzentration x(t) im Verlauf der Zeit?Um diese Frage zu beantworten, wollen wir ein m�ogli hst einfa hes Modellaufstellen. Dazu nehmen wir an, dass die Konzentration des Medikamen-tes im Magen y(t) sofort na h der Medikamentengabe auf einen Wert Aansteigt, und ans hlie�end mit einer Zeitkonstanten � exponentiell abf�allt.Setzen wir den Zeitpunkt der Medikamentengabe als t = 0, so gilt alsoy(t) = Ae��t f�ur t > 0 : (14.14)Man k�onnte hier au h kompliziertere Modelle ansetzen, wir wollen uns je-do h auf einen einfa hen Fall bes hr�anken, der relativ lei ht behandelt wer-den kann.Die Konzentration des Medikamentes im Blut x(t) zur Zeit t wird dur hzwei Faktoren bestimmt. Einerseits verringert sie si h dur h Abbauprozes-se, andererseits steigt sie aufgrund des aus dem Magen aufgenommenenNa hs hubs. Nehmen wir hier vereinfa hend an, dass die Medikamenten-konzentration im Blut in jedem Moment proportional zur H�ohe sinkt undproportional zur im Magen vorhandenen Medikamentenmenge steigt, so er-halten wir ddtx(t) = ��x(t) + Æy(t) : (14.15)Setzen wir (14.14) in (14.15) ein, so ergibt si h die Glei hungddtx(t) = ��x(t) + e��t (14.16)wobei wir = A � Æ gesetzt haben.Die Glei hung (14.16) ist eine inhomogene lineare Di�erentialglei hung er-ster Ordnung und kann mit den gerade diskutierten Methoden behandelt

14.2. INHOMOGENE GLEICHUNGEN: VARIATION DER KONSTANTEN 199werden. Dazu betra hten wir zuerst die der inhomogenen Di�erentialglei- hung (14.16) zugeordnete homogene Di�erentialglei hungddtxh(t) = ��xh(t) ; (14.17)deren allgemeine L�osung wir s hon kennen,xh(t) = e��t mit 2 R : (14.18)Um die inhomogene Glei hung (14.16) zu l�osen, verwenden wir die Methodeder \Variation der Konstanten." Wir ma hen also den Ansatzx(t) = z(t)xh(t) = z(t) e��t : (14.19)Setzen wir diesen Ansatz in (14.16) ein, so erhalten wir wie in der Herleitung(14.10) bis (14.13) die Di�erentialglei hungddtz(t) = y(t)xh(t) = e��t e��t = e(���)t : (14.20)Diese Di�erentialglei hung kann exakt integriert werden, wobei allerdingszwei unters hiedli he F�alle getrennt zu betra hten sind.(A) Falls � = �, gilt na h (14.20): ddtz(t) = . Die Funktion z(t) w�a hstalso linear an, z(t) = z0+ t. In dieser L�osung der Di�erentialglei hung f�urz(t) ist der Parameter z0 2 R im Moment no h unbestimmt, wird aber imn�a hsten S hritt festgelegt werden k�onnen. Aus (14.19) folgt n�amli h f�urx(t): x(t) = [z0 + t℄ � e��t : (14.21)Zur Zeit t = 0 ist im Blut no h kein Medikament vorhanden, das hei�tx(0) = 0. Diese Anfangsbedingung erfordert z0 = 0, so dass insgesamt gilt:x(t) = t e��t (14.22)Damit haben wir eine explizite L�osung der Di�erentialglei hung (14.16) f�urden Fall � = � gefunden, deren Eigens haften wir nun no h kurz unter-su hen wollen (Kurvendiskussion): F�ur Zeiten t, die klein gegen�uber demInversen der Zerfallskonstanten � sind, i.e. jtj � ��1, ist das Argument derExponentialfunktion nur unwesentli h von Null vers hieden, der Wert derFunktion also nahe eins. Damit wird f�ur diese Zeiten der Medikamenten-spiegel im Blut nahezu linear ansteigen, wobei die Steigung gerade dur h gegeben ist: x(t) � t f�ur jtj � ��1.F�ur gro�e Zeiten, jtj � ��1, n�ahert si h die Exponentialfunktion ras h demWert Null und dominiert den nur linear anwa hsenden Term t. F�ur gro�eZeiten wird der Medikamentenspiegel also ebenfalls gegen Null abfallen.Dazwis hen hat die Funktion ein Maximum, dessen Lage dur h die Bedin-gung dxdt = 0 bestimmt ist. Aus (14.22) folgt daf�ur 0 = [1� �t℄e��t odert = ��1. Je s hneller das Medikament also abgebaut wird (je gr�o�er Wertvon � ist), umso s hneller wird au h der maximale Blutspiegelwert errei ht,was au h intuitiv einsi htig ist.(B) Falls � 6= �, so kann (14.20) ebenfalls elementar integriert werden,Z z(t1)z(t0) dz = Z t1t0 e(���)tdt; (14.23)

200 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENoder z(t1)� z(t0) = 1� � � [e(���)(t1�t0) � 1℄ : (14.24)Mit den Werten von Start- und Endpunkt, t0 = 0 und t1 = t, erhalten wiralso z(t) = 1� � � [e(���)t � 1℄ + z(0) : (14.25)Na h Einsetzen in (14.19),x(t) = � 1� � � [e(���)t � 1℄ + z(0)� � e��t; (14.26)kann der Wert von z(0) wieder aus der Anfangsbedingung x(0) = 0 be-stimmt werden, und es folgt daraus au h im nun betra hteten Fall: z(0) = 0.Damit erhalten wir insgesamt:x(t) = � � � �e��t � e��t� : (14.27)Diskutieren Sie au h diese Funktion! Wie verh�alt si h nun der Medikamen-tenspiegel f�ur kurze und lange Zeiten? Wann wird das Maximum errei ht?Ergibt si h eine qualitative �Anderung gegen�uber Fall (A)? Wenn ja: wel he?wenn nein: warum ni ht? ...SELBSTTEST: An dieses Beispiel s hlie�t si h eine Reihe interessanter Fragen an:Wie ho h ist beispielsweise der �uber die gesamte Zeit integrierte Medikamentenspie-gel, der eventuell von direkter Bedeutung f�ur die Wirksamkeit des Medikamentesist? Wie kann diese Gr�o�e bei fester Gesamtdosis A dur h Ver�anderung von �und Æ optimiert werden? Oder sollte man eventuell besser eine Dosierungsstrategiew�ahlen, bei der das Medikament �uber einen l�angeren Zeitraum verteilt mehrfa heingenommen wird? Wie ist dieser Fall mathematis h zu behandeln? ... All dieseau h medizinis h wi htigen Fragen k�onnen Sie mit den Ihnen nun zur Verf�ugungstehenden Methoden l�osen!BEMERKUNG: Glei hung (14.15) tritt au h bei einer Reihe anderer biologis herund medizinis her Fragen auf | \Wie �andert si h das postsynaptis he Potentialeines Neurons na h dem Eintre�en eines pr�asynaptis hen Nervenimpulses?" oderau h: \Wie ver�andert si h die Konzentration von im Blut zirkulierenden Viren unterder Wirkung der Immunreaktion?" | und wird wegen ihrer hohen Relevanz f�urexperimentelle und klinis he Fragestellungen in der Vorlesung Theoretis he BiologieA (3. Semester) no hmals im Detail diskutiert.14.3 Inhomogene Di�erentialglei hungen:L�osung dur h Bezug zur homogenen Glei hungF�ur inhomogene lineare Di�erentialglei hungen gilt:Satz:Die Di�erenz zweier beliebiger L�osungen xa(t) und xb(t) der inhomogenen Di�e-rentialglei hung ddtx(t) = g(t)x(t)+h(t) erf�ullt genau die zugeordnete homogeneGlei hung ddtx(t) = g(t)x(t).

14.3. L �OSUNG HOMOGENER UND INHOMOGENER GLEICHUNGEN 201Beweis:Na h De�nition giltddt xa(t) � ddt xb(t) = [g(t)xa(t) + h(t)℄ � [g(t)xb(t) + h(t)℄= g(t)[xa(t) � xb(t)℄ : (14.28)Also l�ost z(t) = xa(t) � xb(t) gerade (14.3). 2
0 5 10 15 20−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
t
x(t)
xhom
xsp1
xsp2
Abbildung 14.2: L�osungen einer inhomogenen Di�erentialglei hung und der zugeordne-ten homogenen Di�erentialglei hung. Dargestellt sind zwei spezielle L�osungen, xsp1(t) undxsp2(t), der linearen Di�erentialglei hung ddtx(t) = �0:2x(t) + sin(t) zu den Anfangswer-ten x(0) = 0 und x(0) = 3, sowie die Di�erenz xhom(t) dieser beiden L�osungen. Na hder Theorie linearer Di�erentialglei hungen erf�ullt diese L�osung die zugeordnete homoge-ne Di�erentialglei hung, die im dargestellten Fall ddtx(t) = �0:2x(t) lautet. Die L�osungxhom(t) bes hreibt also einen exponentiellen Zerfall, xhom(t) = 3 e0:2t. Dieses Beispiel zeigtdeutli h, dass selbst bei komplizierten inhomogenen linearen Di�erentialglei hungen dieDi�erenz zweier L�osungen immer no h eine sehr einfa he Gestalt hat.Zur Motivation der Di�erentialglei hung: In vielen biologis hen Situationen unterliegt ei-ne Sto�menge (Hormonspiegel, Gr�o�e einer Population, et .) zwei unters hiedli hen Ein- �ussen: Sie verringert si h einerseits proportional zur momentan vorhandenen Menge (Ab-bau des Hormons, Alterungsprozesse, et .) und ist andererseits einem periodis hen �au�erenEin uss ausgesetzt (tageszeitli h ver�anderli he Hormonproduktion, jahreszeitli he S hwan-kungen im Futterangebot, et .). Bezei hnet man mit x(t) die Gr�o�e der S hwankungen umden ohne die �au�eren Ein �usse angenommenen Glei hgewi htswert, so erf�ullt x(t) eine Dif-ferentialglei hung der hier gezeigten Form. Pa�t man die Zerfallskonstante (hier 0:2) unddie Amplitude der Sinuss hwingung (hier 1:0) an das jeweilige biologis he Problem an, sok�onnen die theoretis hen Vorhersagen ni ht nur qualitativ sondern au h quantitativ mitExperimenten beziehungsweise Freilanduntersu hungen vergli hen werden.Aus der letzten Aussage folgt direkt der wi htige Satz:Satz:Die allgemeine L�osung der inhomogenen Di�erentialglei hung ddtx(t) =g(t)x(t)+h(t) kann immer als Summe einer speziellen L�osung der inhomogenenDi�erentialglei hung und der allgemeinen L�osung der zugeordneten homogenenDi�erentialglei hung ddtx(t) = g(t)x(t) ges hrieben werden.

202 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENSu ht man daher die allgemeine L�osung der inhomogenen Di�erentialglei hung(14.2), so gen�ugt es, eine spezielle L�osung dieser Glei hung zu �nden und dazudie allgemeine L�osung der homogenen Di�erentialglei hung (14.3) zu addieren. Dieallgemeine L�osung einer homogenen Di�erentialglei hung l�a�t si h in vielen F�allenmit Hilfe der Separation der Variablen (Kapitel 13.2) �nden | und die spezi-elle L�osung der inhomogenen Di�erentialglei hung erh�alt man gew�ohnli h dur hTri ks oder kann sie sogar erraten. F�ur Glei hungen mit konstanten KoeÆzienten,ddtx(t) = gx + h, existiert f�ur g 6= 0 beispielsweise immer eine station�are L�osung,x(t) = �h=g, wie si h dur h Einsetzen sofort best�atigt. Zusammengenommen kannman damit oft au h kompliziertere inhomogene Di�erentialglei hungen erfolgrei hl�osen.BEMERKUNG: Das Superpositionsprinzip und die daraus abgeleiteten S�atze be-gr�unden die besondere Bedeutung linearer Di�erentialglei hungen. Das Studiumni htlinearer Di�erentialglei hungen ist dagegen gew�ohnli h um einiges komplizier-ter { daf�ur sind die in diesen Systemen m�ogli hen Ph�anomene, wie beispielswieseMusterbildung, au h um einiges rei hhaltiger.14.4 Di�erentialglei hungen h�oherer Ordnung:ExponentialansatzHomogene lineare Di�erentialglei hungen mit konstanten KoeÆzienten wie Glei- hung (14.1), ddtx(t) = �x(t) :oder die s hon in Glei hung (13.27) vorgestellte Di�erentialglei hungm d2dt2 x(t) + ddtx(t) = �kx(t) ; (14.29)k�onnen mit dem Exponentialansatzx(t) = e�t (14.30)gel�ost werden. Als Beispiel wollen wir dazu die L�osungen der physikalis h wie bio-logis h bedeutsamen Di�erentialglei hung (14.29) diskutieren.BEMERKUNG: L�osungsans�atze wie (14.30) bedeuten ni hts anderes, als dass mandie Form der L�osung einer Di�erentialglei hung erraten m�o hte und dazu geeignete\Versu hsballons" startet. Mit etwas Gl�u k und Intuition erf�ullt einer der Ans�atzedie Di�erentialglei hung und man wird zus�atzli h au h no h Information �uber dieParameter des Ansatzes (hier: �) erhalten. Bei linearen homogenen Di�erential-glei hungen wie (14.29) f�uhrt dieser Zugang sogar mit Si herheit zum Ziel | einweiterer Grund, warum si h dieser Di�erentialglei hungstypus gro�er Beliebtheiterfreut und wir uns intensiv mit der Exponentialfunktion bes h�aftigt haben.Die Di�erentialglei hung (14.29) ist eine Di�erentialglei hung zweiter Ordnung. Dieallgemeine L�osung enth�alt also zwei freie Parameter, die dur h die Vorgabe vonzwei Anfangsbedingungen bestimmt werden, beispielsweise dadur h, dass x(0) unddxdt ��t=0 festgelegt werden.Wie aber erhalten wir die allgemeine L�osung?Gem�a� des Exponentialansatzes und der letzten Bemerkung nehmen wir im Fol-genden versu hsweise an, dass L�osungen der Form (14.30) die Di�erentialglei hung

14.4. EXPONENTIALANSATZ 203erf�ullen. Wenn dies stimmt, dann ist ddtx(t) = �e�t = �x(t) und d2dt2x(t) = �2e�t =�2x(t). Setzen wir diese Ausdr�u ke in (14.29) ein, erhalten wirm�2x(t) + �x(t) + kx(t) = 0 : (14.31)Jeder Term in (14.31) enth�alt einen Faktor x(t). Da x(t) = e�t 6= 0 f�ur alle t 2 Rk�onnen wir diesen Faktor ausklammern und erhaltenm�2 + �+ k = 0 : (14.32)Bea hten Sie, dass Glei hung (14.32) keine Zeitabh�angigkeit mehr aufweist | diesist genau der \Tri k" des Exponentialansatzes! Wir haben also (mit Gl�u k bezie-hungsweise Einsi ht) dur h die Wahl x(t) = e�t aus einer Di�erentialglei hung f�urx(t) eine algebrais he Glei hung f�ur � erzeugen k�onnen.SELBSTTEST: Untersu hen Sie, wel he Eigens haft der Di�erentialglei hung (14.29)diesen S hritt erm�ogli hte! Ein Hinweis: Warum kann der Tri k ni ht auf eine ni ht-lineare Di�erentialglei hung wie ddtx(t) = [x(t)℄2 angewendet werden?Glei hung (14.32) ist eine quadratis he Glei hung in � (siehe au h Kapitel 2.4).Falls die Diskriminante D = 2 � 4mk (14.33)gr�o�er als Null ist, besitzt (14.32) somit die beiden reellwertigen L�osungen�1=2 = � �p 2 � 4mk2m : (14.34)Damit erf�ullen die zwei L�osungenx1(t) = e�1t und x2(t) = e�2t (14.35)die Di�erentialglei hung (14.29). Da (14.29) homogen und linear ist, gilt dies na hdem Superpositionsprinzip au h f�urx(t) = C1x1(t) + C2x2(t) (14.36)wie man au h dur h Einsetzen sofort best�atigen kann. Damit ist nun die allgemei-ne L�osung f�ur D > 0 gefunden | eine lineare Kombination zweier exponentiellerL�osungen, wobei wegen p 2 � 4mk < gilt: �1; �2 < 0.1 Je na h Anfangsbedin-gung ergibt si h aus (14.36) der Wert von C1 und C2 und damit die spezielle L�osung.Physikalis h gesehen bedeuten (14.34) bis (14.36), dass bei gen�ugend gro�er D�amp-fung des Systems ( 2 > 4mk) keine S hwingungen auftreten, sondern exponentiellabklingende L�osungen.Was aber ges hieht falls D < 0? In diesem Fall besitzt (14.32) zwei komplexwertigeL�osungen �1=2 = � � ip4mk � 22m : (14.37)Auf den ersten Bli k mag das Auftreten komplexer Zahlen verwundern, da x(t)beispielsweise die Auslenkung eines Federpendels bes hreibt, und damit eine reell-wertige Gr�o�e ist. Da jedo h die beiden komplexen Zahlen �1 und �2 zueinanderkonjugiert-komplexe Zahlen sind, kann man sie au h als�1=2 = �� i! mit � = � 2m und ! = p4mk � 22m (14.38)1Wir haben stills hweigend mk > 0 angenommen, do h zumindest f�ur das Pendelproblem istdies aus physikalis hen Gr�unden au h ri htig | Massen wie Federkonstanten sind positive Gr�o�en.

204 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGENs hreiben. Greift man auf das Superpositionsprinzip zur�u k und addiert beziehungs-weise subtrahiert die beiden entspre henden L�osungen x1 und x2,x1(t) = e�t+i!t und x2(t) = e�t�i!t ; (14.39)so kann man die Beziehungen zwis hen Sinus, Cosinus und komplexer Exponential-funktion ausn�utzen. Na h (11.25) und 11.26) gilt n�amli h os(y) = exp(iy) + exp(�iy)2und sin(y) = exp(iy)� exp(�iy)2i :Damit lassen si h zwei reellwertige L�osungen formulieren,~x1(t) = 12[x1(t) + x2(t)℄ = os(!t)e�t (14.40)und ~x2(t) = 12i [x1(t)� x2(t)℄ = sin(!t)e�t : (14.41)Damit sind zwei spezielle reellwertige L�osungen gefunden. Die allgemeine L�osungwird dann wieder als x(t) = C1~x1(t) + C2~x2(t) ges hrieben, die reellen KonstantenC1 und C2 aus den jeweiligen Anfangsbedingungen bestimmt.Physikalis h gesehen treten also bei kleiner D�ampfung des Systems ( 2 < 4mk)exponentiell ged�ampfte Sinus- bzw. Cosinus-S hwingungen auf. Dabei wird eineS hwingung umso langsamer abklingen, je kleiner die D�ampfungskonstante ist.F�ur den idealisierten Fall = 0 bleibt die S hwingung f�ur alle Zeiten erhalten unddie S hwingungsfrequenz ! ist na h (14.38) dur hpk=m gegeben. Mit zunehmenderD�ampfung verringert si h s hlie�li h die S hwingungsfrequenz !.Die L�osungen ~x1(t) und ~x2(t) h�atte man au h direkt als Ansatz mit anfangs unbe-stimmten Parametern ! und � formulieren und dann die Werte dieser Parameteraus der Di�erentialglei hung (14.29) gewinnen k�onnen. Wenn Sie diesen L�osungs-weg zur Probe dur hf�uhren, werden Sie erkennen, dass er um einiges aufwendigerist, als der hier skizzierte \Weg dur hs Komplexe" | vor allem, da er die ges hi k-te Anwendung der Additionstheoreme von Sinus und Cosinus erfordert. Falls Ihnenjedo h die Verwendung von komplexwertigen und damit unphysikalis hen L�osungenni ht geheuer ist: denken Sie daran, dass Ihnen au h die als Kind unbegrei i hennegativen Zahlen keine gr�o�eren Probleme mehr bereiten . . .BEMERKUNG: Vers hwindet im obigen Beispiel die Diskriminante, so liefert derAnsatz x(t) = C1e�t nur eine L�osung wobei � wiederum dur h (14.38) gegebenist. Die Di�erentialglei hung ist aber weiterhin von zweiter Ordnung, so dass na hKapitel 13.3.2 zwei Anfangsbedingungen frei gew�ahlt werden k�onnen, beispielsweisedxdt ��t=0 und x(0). Die L�osung x(t) = C1e�t enth�alt jedo h mit C1 nur einen freienParameter. Was ist zu tun?O�ensi htli h m�ussen wir no h einen zweiten Versu h starten und explizit na heiner weiteren L�osung su hen. Na hdem si h der Exponentialansatz bei linearenDi�erentialglei hungen bisher so gut bew�ahrt hat, k�onnte man versu ht sein, einenAnsatz der Form x(t) = e�t + y(t) zu w�ahlen, in der Ho�nung, dann eine einfa heDi�erentialglei hung f�ur y(t) zu �nden, diese zu l�osen, und so die ersehnte zweiteL�osung zu erhalten. Wegen der Linearit�at von (14.29) f�uhrt dieser Versu h jedo hins Leere, da die resultierende Di�erentialglei hung f�ur y(t) wieder die Form von

14.4. EXPONENTIALANSATZ 205
0 5 10 15 20−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
t
x(t)
x1(t)
x2(t)
x3(t)
Abbildung 14.3: Illustration der vers hiedenen L�osungstypen eines ged�ampften harmo-nis hen Oszillators. Drei L�osungen der Di�erentialglei hung d2dt2 x(t) + ddtx(t) = �x(t)zum Anfangswert x(0) = 0 und dxdt ��t=0 = 1 sind dargestellt. Diese Di�erentialglei hungist ein Spezialfall der Di�erentialglei hung (14.29) mit m = k = 1. Na h der in diesemKapitel entwi kelten Theorie h�angt der L�osungstyp vom Wert der Diskrimante D ab, f�urdie na h (14.33) im gew�ahlten Beispiel gilt: D = 2 � 4. F�ur 2 < 4 ist die Diskrimantenegativ und man erh�alt eine ged�ampfte harmonis he S hwingung wie x1(t) (mit = 0:1).F�ur 2 = 4 vers hwindet die Diskriminante. Die entspre hende L�osung x2(t) wird au h alsaperiodis her Grenzfall bezei hnet. Ist s hlie�li h 2 > 4, so ist die Diskrimante positiv.Das Beispiel = 4 f�uhrt zur stark �uberd�ampften L�osung x3(t). Der qualitative Unters hiedzwis hen den beiden letzten L�osungen | x2(t) ist eine L�osung der Form te�t, x3(t) ist dieDi�erenz zweier Exponentialfunktioen | ist ni ht si htbar, aus dem Verglei h aller dreiL�osungen wird jedo h deutli h, dass die maximal errei hte S hwingungsamplitude starkvon der D�ampfung abh�angt.(14.29) hat, also ni hts gewonnen ist. W�ahlt man jedo h einen Ansatz der Formx(t) = e�t � y(t), erh�alt man die Di�erentialglei hung d2y=dt2 = 0 f�ur y(t), derenL�osung y(t) = C1+C2t lautet. F�ur C2 = 0 entspri ht dies genau der s hon bekanntenL�osung, f�ur C2 6= 0 hat man die gesu hte zweite L�osung gefunden.Physikalis h nennt man diese spezielle Situation au h \aperiodis hen Grenzfall", dahier im Verglei h zu (14.40) und (14.41) gerade keine Oszillationen mehr auftreten.SELBSTTEST: F�uhren Sie die obigen S hritte explizit dur h und untersu hen Siedie Form der allgemeinen L�osung (Kurvendiskussion). Nun kommt eine h�o hst in-teressante Frage: Verglei hen Sie Ihr Ergebnis mit der Ableitung von Glei hung(14.21) aus (14.15). Was f�allt Ihnen auf? Diskutieren Sie die Ursa he dieses Ph�ano-mens anhand der zugrunde liegenden Di�erentialglei hungen!BEMERKUNG: Lineare Di�erentialglei hungen h�oherer Ordnung kann man na hdem glei hen Verfahren behandeln. Der Ansatz f�uhrt dabei auf ein Polynom n-ten Grades in �, das allerdings von Spezialf�allen abgesehen nur numeris h na h �aufgel�ost werden kann.

206 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGEN14.5 Lineare Stabilit�atsanalyseNa hdem wir nun zentrale Elemente der Theorie linearer Di�erentialglei hungenvorgestellt haben, wollen wir no h zeigen, dass diese Theorie au h zur Untersu hungwi htiger Aspekte ni htlinearer Systeme geeignet ist. Dabei stehen folgende Fragenim Vordergrund:Wie s hnell relaxieren L�osungen zu einer asymptotis h stabilen sta-tion�aren L�osung hin, wie s hnell bewegen sie si h von einer instabilen station�arenL�osung fort? Wi htiger no h: Ist eine bestimmte station�are L�osung �uberhaupt sta-bil? Antworten auf derartige Fragen liefert die lineare Stabilit�atsanalyse.Interessiert man si h f�ur die Stabilit�at einer vorgegebenen station�aren L�osung x?, somuss man untersu hen, ob si h kleine Abwei hungen von dieser L�osung l�angerfristigbemerkbar ma hen | wa hsen sie mit der Zeit an oder klingen sie wieder ab? Na hden De�nitionen von Kapitel 13.1 hei�t die station�are L�osung im ersten Fall instabil,im zweiten Fall asymptotis h stabil.2Im folgenden wollen wir uns auf gew�ohnli he Di�erentialglei hungen erster Ordnungder Form ddtx(t) = f(x(t)) (14.42)bes hr�anken. Um die Stabilit�at einer station�aren L�osung von (14.42) zu untersu hen,betra hten wir das L�osungsverhalten in der N�ahe einer derartigen L�osung und setzenin einem ersten S hritt als L�osung x(t) = x?+y(t) an. Diese Formulierung kann manimmer errei hen | au h f�ur beliebige gro�e Abwei hungen | indem man y(t) alsy(t) = x(t)� x? de�niert. Da x? eine Konstante ist, gilt ddtx? = 0 und wir erhaltenddty(t) = ddt (x(t)�x?) = ddtx(t). Setzen wir an dieser Stelle Glei hung (14.42) ein, sofolgt ddty(t) = f(x(t)) = f(x?+ y(t)), wobei im letzten S hritt wieder die De�nitionvon y(t), nun in Form von x(t) = x? + y(t) verwendet wurde. Insgesamt gilt alsoddty(t) = f(x? + y(t)) mit f(x?) = 0 : (14.43)Da wir im Moment nur an kleinen Abwei hungen von der station�aren L�osung in-teressiert sind, betra hten wir nun in einem zweiten S hritt die re hte Seite derGlei hung in linearer N�aherung, das hei�t f�ur kleine Werte y(t). Dazu bere hnenwir die ersten beiden Glieder der Taylorentwi klung von f an der Stelle x?,f(x(t)) � f(x?) + (x(t)� x?) � dfdx ����x? : (14.44)Na h unserer De�nition gilt x(t) = x? + y(t). Setzen wir diese Beziehung in Glei- hung (14.44) ein, dann erhalten wirf(x? + y(t)) � f(x?) + y(t) � dfdx ����x? = 0 + y(t) � f 0(x?) : (14.45)Der Funktionswert f(x?) ist Null, da x? na h Voraussetzung eine station�are L�osungist. Der Term f 0(x?) bezei hnet wie gew�ohnli h die Steigung der Funktion f(x) ander Stelle x? { siehe au h no hmals Abbilung 13.2.In dieser linearen N�aherung (alle Terme h�oherer Ordnung wurden verna hl�assigt)erhalten wir eine lineare homogene Di�erentialglei hung f�ur y | siehe au h (14.2),2In h�oherdimensionalen Systemen k�onnen daneben au h andere Ph�anomene auftreten, bei-spielsweise Oszillationen um die station�are L�osung | wie im Fall eines harmonis hen Oszillators.Mit den Resultaten zur qualitativen Analyse von Di�erentialglei hungen (Kapitel 13.1) wissen wirjedo h, dass dies in einer Di�erentialglei hung der Form (14.42) ni ht ges hehen kann.

14.6. AUFGABEN 207ddty(t) = y(t) � f 0(x?) : (14.46)Da der Faktor f 0(x?) f�ur gegebenes x? eine Konstante ist, ist (14.46) formal identis hmit der uns wohlbekannten Glei hung (14.1). Damit kann die allgemeine L�osungsofort angegeben werden, y(t) = C ef 0(x?)�t (14.47)wobei C 2 R und damit x(t) = x? + C ef 0(x?)�t : (14.48)F�ur negative f 0(x?) erh�alt man somit exponentiell relaxierende L�osungen | diestation�are L�osung x? ist also asymptotis h stabil | f�ur positive f 0(x?) ergeben si hexponentiell anwa hsende L�osungen | die station�are L�osung ist instabil. Bea htenSie jedo h, dass diese lineare N�aherung nur in der N�ahe der station�aren L�osungg�ultig ist. Ni htlinearit�aten der Funktion f k�onnen dazu f�uhren, dass die L�osungender urspr�ungli hen Di�erentialglei hung f�ur f 0(x?) > 0 ni ht f�ur alle Zeiten expo-nentiell anwa hsen sondern bes hr�ankt bleiben, wie man dies aus physikalis henGr�unden au h fordern sollte.SELBSTTEST: Verglei hen Sie die Ergebnisse zur linearen Stabilit�atsanalyse mitden Resultaten zur qualitativen Analyse in Kapitel 13.1! Wel he Gemeinsamkeiten,wel he Unters hiede erkennen Sie? Betra hten Sie dazu als konkretes Beispiel einerDi�erentialglei hung der Form ddtx(t) = f(x(t)) die Glei hung ddtx(t) = �x3 + 9x.14.6 Aufgaben1. (Lineare Di�erentialglei hung) Ein Medikament wird einem Patienten mit kon-stanter Rate r (in Gramm/Sekunde) �uber eine Infusion zugef�uhrt. Glei hzeitig wirdes vom K�orper proportional der vorhandenen Menge x(t) mit Proportionalit�atskon-stante � abgebaut.(a) Stellen Sie eine Di�erentialglei hung _x = f [x(t)℄ f�ur x(t) auf.(b) Skizzieren Sie f(x) .( ) Wel he Fixpunkte hat die Di�erentialglei hung?(d) Diskutieren Sie ihre Stabilit�at (lineare Stabilit�atsanalyse).(e) L�osen Sie die Di�erentialglei hung zun�a hst f�ur beliebige Anfangswerte x(t =0) = x0 dur h Trennung der Variablen und zei hnen Sie dann x(t) f�ur die speziellenAnfangswerte (i) x0 = 0 ; (ii) x0 = r� ; (iii) x0 = 2 r� :

208 KAPITEL 14. LINEARE DIFFERENTIALGLEICHUNGEN

Kapitel 15Lineare Glei hungen undGau�s hesEliminationsverfahrenHolt A hilles die S hildkr�ote in endli her Zeit ein?Im Wintersemester war am Beispiel des Paradoxons von Xenon darauf hingewiesenworden, dass die alten Grie hen den Grenzwertbegri� no h ni ht gefunden hatten.Wir greifen hier den Wettlauf von A hilles und der S hildkr�ote no hmals als eineinfa hes Beispiel wieder auf und stellen uns die Frage, unter wel hen BedingungenA hilles die S hildkr�ote einholen kann | und wie viel Zeit er dazu ben�otigt.Dazu nehmen wir an, dass die S hildkr�ote zur Zeit t = 0 am Ort x(0) = S mit derkonstanten Ges hwindigkeit vS na h re hts zu laufen beginnt, w�ahrend A hilles zurZeit t = 0 bei A mit der Ges hwindigkeit vA losspurtet. Daraus ergibt si h:Bewegungsglei hung der S hildkr�ote:x(t) = S + vSt (15.1)Bewegungsglei hung des A hilles:x(t) = A + vAt (15.2)Falls A hilles die S hildkr�ote einholt, m�ussen si h beide im Moment t� der Begeg-nung am glei hen Ort x(t�) be�nden. Damit muss S + vSt� = A + vAt� (15.3)gelten, das hei�t S � A = t�(vA � vS) : (15.4)Nehmen wir nun an, dass vA > vS , so folgtt� = S � AvA � vS : (15.5)Damit holt A hilles { im Gegensatz zur alten grie his hen Lehrmeinung { die S hild-kr�ote na h einer eindeutig festgelegten endli hen Zeit ein.209

210 KAPITEL 15. LINEARE GLEICHUNGEN
t
x
c
c
S
A
*t
~ v
~ v
S
AAchilles
Schildkröte
Abbildung 15.1: A hilles und die S hildkr�oteWie die obige Abbildung zeigt, sind die Trajektorien des A hilles und der S hildkr�oteGeraden. Dies liegt daran, dass in den Glei hungen (15.1) und (15.2) die beidenVariablen, Ort x und Zeit t, nur linear, das hei�t in der ersten Potenz auftau hen.Derartige Glei hungen werden lineare Glei hungen genannt:De�nition (Lineare Glei hungen):Eine Glei hung hei�t linear, wenn ihre Unbekannten (oder: Variablen) nur inder ersten Potenz auftreten. Die Glei hung hei�t homogen, wenn sie keineadditiven Konstanten enth�alt, ansonsten wird sie inhomogen genannt.Falls S 6= 0, ist Glei hung (15.1) also eine inhomogene lineare Glei hung, falls S = 0 eine homogene lineare Glei hung. Entspre hendes gilt f�ur (15.2).BEMERKUNG: Verglei hen Sie die De�nition einer (in)homogenen Glei hung ge-nau mit der De�nition einer (in)homogenen linearen Iterierten Abbildung (Kapitel6.1) und der De�nition einer (in)homogenen linearen Di�erentialglei hung in Kapi-tel 14! Was f�allt Ihnen auf?BEMERKUNG: Quasi als Na htrag zur letzten Bemerkung: Die Glei hungen x = t2und x2 = t sind beide ni htlinear, da im ersten Fall die Variable t, im zweiten Falldie Variable x quadratis h auftau ht. Dagegen ist die Di�erentialglei hung dxdt =xt2 eine lineare Di�erentialglei hung, da sie die dynamis he Variable x und ihreAbleitungen nur in linearer Ordnung enth�alt | wohingegen die Di�erentialglei hungdxdt = x2t ni htlinear ist, da hier die dynamis he Variable x quadratis h ers heint.Zur�u k zu unserem Beispiel: Wie au h die Abbildung zeigt, bes hreibt jede einzelneder beiden Glei hungen eine Gerade. Su ht man also na h einer L�osung, die beideGlei hungen erf�ullt, so entspri ht dies der Su he na h dem S hnittpunkt beiderGeraden. Das urspr�ungli he Problem ist also identis h mit einem rein geometris henProblem. Dessen L�osung ist o�ensi htli h: Falls si h die Steigungen vA und vS derzwei Geraden unters heiden, so s hneiden si h die Geraden in genau einem Punkt.BEMERKUNG: Sp�ater werden wir ganz allgemein von der L�osung eines linearenGlei hungssystems spre hen, oder �aquivalent dazu, von der L�osung eines Sy-stems linearer Glei hungen oder eines Systems gekoppelter linearer Glei- hungen. Damit ist gemeint, dass wir eine L�osung su hen, die alle betra hteten

15.1. LINEARE GLEICHUNGEN 211linearen Glei hungen gemeinsam l�ost. Im Sinn dieser Nomenklatur ist der Punkt(t�; x(t�)) die L�osung des Systems der beiden linearen Glei hungen (15.1) und (15.2).Was aber ges hieht unter der (f�ur A hilles allerdings entw�urdigenden) AnnahmevA = vS? Glei hung (15.4) lautet in diesem Fall S � A = t� � 0 : (15.6)Im Fall S 6= A gibt es also keine L�osung und f�ur S = A existieren unendli hviele L�osungen.Ans hauli h bedeuten die beiden letzten F�alle, dass bei glei her Ges hwindigkeit(vA = vS) A hilles die S hildkr�ote ni ht einholen kann (wenn S 6= A) beziehungs-weise immer exakt neben ihr hers hlei ht (wenn S = A).Notiz:Das Auftreten dieser drei M�ogli hkeiten { eine L�osung, keine L�osung, unend-li h viele L�osungen { in Abh�angigkeit von den gew�ahlten Parametern ist imWesentli hen s hon der Kern der Theorie linearer Glei hungen.In Zukunft wollen wir au h kompliziertere Situationen mit mehreren Unbekanntenbehandeln k�onnen. Um bei derartigen Fragen ni ht in jedem Fall neu formulierenzu m�ussen, bringen wir die betra hteten Glei hungen auf die Standardform einesSystems gekoppelter linearer Glei hungen, und entwi keln darauf aufbauend einenges hlossenen L�osungsformalismus.Dieser Formalismus erlaubt mannigfa he Anwendungen. Ein Beispiel zum Abs hlu�:Bei der Untersu hung einer Gewebeprobe stellt si h heraus, dass sie 50 Volumen-prozent von Zellart x1, 30% von Zellart x2 und 20% von Zellart x3 enth�alt. EinKubikzentimeter des Gewebes wiegt 0:84 Gramm. Zwei andere Proben enthaltenebenfalls diese drei Zellarten { die zweite im Volumenverh�altnis 80 : 10 : 10 beieinem Gesamtgewi ht von 0:94 Gramm pro m3, die dritte im Volumenverh�altnis60 : 10 : 30 bei einem Gesamtgewi ht von 0:90 Gramm pro m3. Kann man ausdiesen drei Messungen die Di hten der einzelnen Zellarten bestimmen, und wennja, wie gro� sind sie? In Kapitel 15.2 werden wir ein systematis hes Verfahren ken-nenlernen, um Probleme dieser Art zu beantworten.15.1 Lineare Glei hungenDie Standardform einer linearen Glei hung erhalten wir aus (15.1), indem wir ineinem ersten S hritt die beiden Variablen | hier x und t | auf die linke Seiteund inhomogene Terme auf die re hte Seite der Glei hung bringen. Dies ergibtdie Glei hung x � vSt = S . Nun benennen wir no h die einzelnen Variablen undParameter um: Wir bezei hnen die Ortsvariable mit x1, die Zeitvariable mit x2 undsetzen a12 = �vS und b1 = S . Damit erhalten wir insgesamta11x1 + a12x2 = b1 (15.7)mit a11 = 1.Setzen wir a22 = �vA und b2 = A, so f�uhrt der glei he Ansatz f�ur (15.2) aufa21x1 + a22x2 = b2 (15.8)

212 KAPITEL 15. LINEARE GLEICHUNGENmit a21 = 1.Das System (15.7),(15.8) stellt nun die Standardform eines Systems zweier linearerGlei hungen dar.Bisher haben wir na h dem S hnittpunkt zweier Geraden gesu ht. In glei her Weisek�onnten wir nat�urli h au h fragen, unter wel hen Bedingungen drei Geraden eineneinzigen S hnittpunkt haben, und wo dieser liegt. In diesem Fall m�u�ten wir alsodie L�osung eines Glei hungssystems mit drei Glei hungen der Form (15.7) su hen.Wir werden auf diese Frage sp�ater zur�u kkommen.Glei hungen wie (15.7) oder (15.8) bes hreiben Geraden. Wel he Form hat aberdie Glei hung einer Ebene im dreidimensionalen Raum? Im Allgemeinen wird eineEbene im Raum, die dur h die x1-A hse und die x2-A hse aufgespannte Ebenes hneiden. Die S hnittmenge hat die Form einer Geraden. In der x1 � x2-Ebenebes hreibt also (15.7) eine sol he Gerade. Entspre hendes gilt f�ur die S hnitte mitder x2�x3-Ebene und der x1�x3-Ebene. Deshalb lautet die Glei hung einer Ebene:a11x1 + a12x2 + a13x3 = b1 (15.9)Die S hnittmenge zweier beliebiger Ebenen werden damit dur h die L�osungen vonzwei Glei hungen der Form (15.9) bes hrieben, die S hnittmenge dreier Ebenendur h die L�osungen von drei Glei hungen der Form (15.9), und entspre hendes giltf�ur S hnittmengen in h�oherdimensionalen R�aumen, au h wenn wir uns diese ni htmehr ans hauli h vorstellen k�onnen.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
x
x
x
1
2
3
Abbildung 15.2: Auss hnitt einer Ebene im dur h x1, x2 und x3 aufgespannten Raum.Ausgehend von diesen Beispielen stellt si h die allgemeine Frage, wie man L�osun-gen von Systemen mit n linearen Glei hungen und m Unbekannten �ndet, also dieL�osung eines Glei hungssystems der Forma11x1 + a12x2 + : : : + a1mxm = b1a21x1 + a22x2 + : : : + a2mxm = b2... ... . . . ... = ...an1x1 + an2x2 + : : : + anmxm = bn (15.10)

15.1. LINEARE GLEICHUNGEN 213De�nition (Dimension eines Glei hungssystems):Die Zahlm der Unbekannten hei�t au hDimension des Glei hungssystems.Es soll an dieser Stelle aber s hon betont werden, dass wir den Formalismus zwarf�ur beliebige Dimension m und Glei hungszahl n entwi keln werden, bei konkretenBeispielen jedo h meist Situationen mit m;n � 3 betra hten werden.Die m Unbekannten x1 : : : xm eines Glei hungssystems k�onnen au h kompakt alsVektor ~x ges hrieben werden:De�nition (Vektor):Es seienm reelle (oder au h komplexe) Zahlen x1; : : : xm vorgegeben. Sie k�onnenals Vektor ~x 2 Rm (beziehungsweise ~x 2 Cm) dargestellt werden, indem mansie na h ihrem Index geordnet aufs hreibt, ~x = (x1; x2; : : : ; xm). Die Zahl xi mit1 � i � m wird dann als i-te Komponente des m-dimensionalen Vektors~x bezei hnet.Zwei m-dimensionale Vektoren sind genau dann identis h, wenn sie komponen-tenweise �ubereinstimmen, ~x = ~y () xi = yi f�ur alle 1 � i � m.BEISPIEL :Der Ortsvektor ~r, Ges hwindigkeitsvektor ~v, und Bes hleunigungsvektor ~aeines physikalis hen Teil hens sind reellwertige Vektoren im dreidimensio-nalen Raum R3.Der Vektor ~a = (1 � 5i; 2 + i) ist ein Vektor im Raum C2 da seine zweiKomponenten, a1 = 1� 5i und a2 = 2 + i, komplexe Zahlen sind.BEMERKUNG: Die zwei Vektoren ~x = (1; 2) und ~y = (2; 1) sind na h De�nitionunters hiedli he Vektoren. Im Gegensatz dazu sind jedo h die beiden MengenM1 =f1; 2g und M2 = f2; 1g identis he Mengen!BEMERKUNG: Die komplexe Zahl z = x+iy kann au h als reellwertiger (!) Vektor~z = (x; y) im zweidimensionalen Raum R2 aufgefasst werden. Die Multiplikationzweier komplexer Zahlen kann jedo h ni ht als Multiplikation zweier Vektoren dar-gestellt werden. Wir werden aber sp�ater sehen, dass es au h eine der Multiplikationkomplexer Zahlen entspre hende Operation f�ur Vektoren gibt.15.1.1 Homogene und Inhomogene Glei hungssystemeAnalog zum eindimensionalen Fall wird das System (15.10) homogen genannt fallsalle bj vers hwinden. Falls mindestens ein bj unglei h Null ist, hei�t es inhomogen.Damit k�onnen wir nun zwei wi htige S�atze formulieren:Satz (Superpositionsprinzip):Sei (15.10) ein homogenes Glei hungssystem, das hei�t ~b � (b1; b2; : : : ; bn) = 0.Weiterhin seien ~x � (x1; x2; : : : ; xm) und ~y � (y1; y2; : : : ; ym) zwei L�osungendieses Systems. Dann ist au h jede Linearkombination ~z = �~x+�~y mit �; � 2 Reine L�osung.Beweis dur h Einsetzen.

214 KAPITEL 15. LINEARE GLEICHUNGENSatz:Jede L�osung des inhomogenen Glei hungssystems (15.10) kann als Summe einerspeziellen L�osung von (15.10) und einer L�osung des zugeordneten homogenenSystems ges hrieben werden.Beweis:Die Aussage des Satzes ist glei hbedeutend mit der Aussage, dass die Di�erenz zwei-er L�osungen ~x � (x1; x2; : : : ; xm) und ~y � (y1; y2; : : : ; ym) des inhomogenen Glei- hungssystems eine L�osung des zugeordneten homogenen Systems ist. Diese zweiteAussage veri�ziert man dur h Einsetzen von ~x und ~y in (15.10).BEMERKUNG: Verglei hen Sie die beiden S�atze mit den entspre henden S�atzen�uber Lineare Iterierte Abbildungen (Kapitel 6.1) und Lineare Di�erentialglei hun-gen in Kapitel 14.3!15.1.2 L�osung f�ur ein System mit zwei Glei hungenBevor wir die allgemeine L�osung eines Systems mit n Glei hungen behandeln, wollenwir zuerst zu unserem Beispiel von zwei Glei hungen mit zwei Unbekannten x1 undx2 zur�u kkehren, und dieses Glei hungssystem f�ur beliebige reelle Parameter a11,a12, a21, a22, b1 und b2 untersu hen.Um die Variable x1 zu eliminieren, multiplizieren wir (15.7) mit a21,a11a21x1 + a12a21x2 = a21b1 (15.11)und (15.8) mit a11, a11a21x1 + a11a22x2 = a11b2 : (15.12)Subtrahieren wir nun Glei hung (15.11) von (15.12), erhalten wir(a11a22 � a12a21) x2 = a11b2 � a21b1 : (15.13)Falls a11a22 � a12a21 6= 0, so folgt f�ur x2x2 = a11b2 � a21b1a11a22 � a12a21 (15.14)und daraus mit Hilfe von (15.7)x1 = b1a22 � b2a12a11a22 � a12a21 : (15.15)Wie im Fall vA 6= vS des Beispiels von A hilles und der S hildkr�ote erhalten wiralso eine eindeutige L�osung. Falls dagegen der Term a11a22 � a12a21 vers hwindet,hat das System (15.7) und (15.8) entweder keine L�osung (wenn a11b2 � a21b1 6= 0)oder unendli h viele L�osungen (wenn a11b2 � a21b1 = 0).Da wir a12 = �vS , a22 = �vA und a11 = a21 = 1 gesetzt hatten, stimmt dieBedingung a11a22 � a12a21 6= 0 au h exakt mit der fr�uheren Bedingung vA 6= vS�uberein. Au h die L�osungen entspre hen einander | pr�ufen Sie dies selbst na h!In den Glei hungen (15.14) und (15.15) tau hen bestimmte Kombinationen mitjeweils vier der se hs Parameter aij und bi wiederholt auf. Wir f�uhren deshalb eine

15.2. GAUSSSCHES ELIMINATIONSVERFAHREN 215Abk�urzung f�ur diese spezielle Kombination ein, die Determinante genannt undmit det bezei hnet wird: det0� a b d 1A � ad� b : (15.16)Damit k�onnen wir (15.15) und (15.14) kompakt alsx1 = det0� b1 a12b2 a22 1Adet0� a11 a12a21 a22 1A und x2 = det0� a11 b1a21 b2 1Adet0� a11 a12a21 a22 1A (15.17)s hreiben.Im Moment vers ha�t diese S hreibweise no h keinen wesentli hen Vorteil gegen�uber(15.15) und (15.14), wir werden jedo h in Kapitel 17 sehen, dass die Determinanteau h auf Glei hungen mit mehreren Variablen angewendet werden kann, bei deneneine kompakte Angabe der L�osungen sonst ni ht mehr so lei ht m�ogli h ist.Zuerst wollen wir jedo h derartige Glei hungen direkt l�osen:15.2 Gau�s hes EliminationsverfahrenDie L�osung (15.14), (15.15) hatten wir erhalten, indem wir die Ausgangsglei hungen(15.7) und (15.8) geeignet umformten, so dass wir in einer der beiden Glei hungendie Variable x1 eliminieren konnten | siehe (15.11) bis (15.13). Dadur h hatten wirmit Glei hung (15.13) eine Glei hung mit nur einer Variable erhalten, die wir direktl�osen konnten. Dies f�uhrt direkt auf (15.14). Dieses Ergebnis wurde ans hlie�end ineine der beiden Ausgangsglei hungen eingesetzt und lieferte (15.15).Der wesentli he Tri k bestand somit darin, dur h ges hi kte Kombination der Aus-gangsglei hungen einfa here Glei hungen zu erhalten, diese direkt zu l�osen, unddann mit Hilfe der Ergebnisse die urspr�ungli he Glei hung zu l�osen.Wir �ubertragen nun diesen Zugang auf lineare Glei hungen mit mehreren Variablenwie (15.10), a11x1 + a12x2 + : : : + a1mxm = b1a21x1 + a22x2 + : : : + a2mxm = b2... ... . . . ... = ...an1x1 + an2x2 + : : : + anmxm = bnIn einem ersten S hritt subtrahieren wir von jeder Zeile k mit k > 1 das ak1a11 -fa heder ersten Zeile und erhaltena11x1 + a12x2 + : : : + a1mxm = b10 + (a22 � a21a11 a12)x2 + : : : + (a2m � a21a11 a1m)xm = b2 � a21a11 b1... ... . . . ... = ...0 + (an2 � an1a11 a12)x2 + : : : + (anm � an1a11 a1m))xm = bn � an1a11 b1
216 KAPITEL 15. LINEARE GLEICHUNGENDamit haben wir errei ht, dass die Variable x1 nur no h in der ersten Glei hungers heint.Falls a11 = 0 k�onnen wir jedo h die Division dur h a11 ni ht dur hf�uhren. In diesemFall su hen wir na h einer Zeile j f�ur die aj1 6= 0 gilt und vertaus hen diese Zeilemit der ersten Zeile. Nun k�onnen wir den obigen S hritt dur hf�uhren. Ans hlie�endgehen wir zum zweiten S hritt �uber:Wir betra hten nun nur no h all die Glei hungen, in denen der Vorfaktor von x1vers hwindet, d.h. n� 1 Glei hungen f�ur die m� 1 Variablen x2 bis xm:a11x1 + a12x2 + : : : + a1mxm = b10 (a22 � a21a11 a12)x2 + : : : + (a2m � a21a11 a1m)xm = b2 � a21a11 b1... ... . . . ... = ...0 (an2 � an1a11 a12)x2 + : : : + (anm � an1a11 a1m)xm = bn � an1a11 b1Auf dieses reduzierte Glei hungssystem wenden wir wieder den ersten S hritt an undk�onnen damit errei hen, dass die Variable x2 im reduzierten Glei hungssystem nurin der ersten Glei hung { und damit insgesamt nur in den ersten beiden Glei hungeners heint.Setzen wir dieses Verfahren fort, k�onnen wir na h insgesamt n S hritten das ur-spr�ungli he System (15.10) auf die Forma11x1 + a12x2 + : : : + a1;m�1xm�1 + a1mxm = b10 + ~a22x2 + : : : + ~a2;m�1xm�1 + ~a2mxm = ~b2... ... . . . ... ... = ...0 + 0 + : : : + ~an�1;m�1xm�1 + ~an�1;mxm = ~bn�10 + 0 + : : : + 0 + ~anmxm = ~bn(15.18)bringen. Das hier bes hriebene Verfahren wird Gau�s hes Eliminationsverfah-ren genannt. Um zu verdeutli hen, dass die Vorfaktoren im letzten Glei hungssy-stem ni ht mit denen von (15.10) identis h sind, haben wir sie mit einer Tilde (~)versehen.Na h diesen Umformungen ist das Problem gel�ost. Falls ~anm 6= 0 ergibt si h derWert von xm aus der letzten Glei hung von (15.18) zuxm = ~bn~anm : (15.19)Setzt man dieses Ergebnis in die vorletzte Glei hung ein, erh�alt man f�ur xm�1, falls~an�1;m�1 6= 0xm�1 = 1~an�1;m�1 �~bn�1 � ~an�1;mxm� = 1~an�1;m�1 ~bn�1 � ~an�1;m ~bn~anm! ;(15.20)

15.2. GAUSSSCHES ELIMINATIONSVERFAHREN 217und in glei her Weise kann man nun sukzessive alle xj bestimmen, wiederum unterder Voraussetzung, dass alle auftretenden Divisionen ausgef�uhrt werden k�onnen.Was bedeutet es, falls eine der Divisionen ni ht ausgef�uhrt werden kann? Betra htenwir den Fall ~anm = 0 in (15.18):0 �xm = ~bn ) 8<: falls ~bn 6= 0: das Glei hungssystem hat keine L�osungfalls ~bn = 0: xm unbestimmtDiese beiden F�alle entspre hen genau den Ergebnissen der Diskussion von Glei hung(15.6) des Beispiels von A hilles und der S hildkr�ote!Wie wirkt si h eine Unbestimmtheit von xm auf xm�1 aus? Falls ~an�1;m�1 6= 0 giltna h (15.20) xm�1 = ~bn�1~an�1;m�1 � ~an�1;m~an�1;m�1xm : (15.21)In der dur h xm�1 und xm aufgespannten Ebene stellen die L�osungen von (15.21)also eine Gerade dar.Falls au h ~an�2;m�2 6= 0, kann die L�osungsmenge als eine Gerade im dur h xm,xm�1, xm�2 aufgespannten Raum aufgefa�t werden. xm kann dabei als freier Pa-rameter betra htet werden, der die Punkte dieser Gerade parametrisiert. Fallsweiterhin ~an�3;m�3 6= 0, et ., entspri ht dies einer Gerade in einem entspre hendh�oherdimensionalen Raum.Wenn dagegen ein weiteres xk ni ht festgelegt werden kann, ist die L�osung dur hzwei freie Parameter gekennzei hnet. Geometris h bedeutet dies, dass alle Punkteeiner Ebene L�osungen sind. Drei freie Parameter entspre hen einer dreidimensiona-len L�osungsmenge et .BEISPIEL:Wir wollen nun unsere Erkenntnisse auf das am Ende von Abs hnitt 15.1bes hriebene Problem anwenden. Bezei hnen x1, x2 und x3 die Di htender drei Zellarten (in Gramm pro Kubikzentimeter), so erhalten wir diefolgenden drei Glei hungen:0:5x1 + 0:3x2 + 0:2x3 = 0:84 I0:8x1 + 0:1x2 + 0:1x3 = 0:94 II0:6x1 + 0:1x2 + 0:3x3 = 0:9 IIINa h dem ersten Umformungss hritt erh�alt man:0:5x1 + 0:3x2 + 0:2x3 = 0:84 I1:9x2 + 1:1x3 = 2; 02 8 � I - 5 � II (II0)1:3x2 � 0:3x3 = 0:54 6 � I - 5 � III (III0)Na h dem zweiten S hritt:0:5x1 + 0:3x2 + 0:2x3 = 0:84 I1:9x2 + 1:1x3 = 2:02 II020:0x3 = 16:00 13 � II0 - 19 � III0 (III00)

218 KAPITEL 15. LINEARE GLEICHUNGENAus Glei hung III00 folgt sofort x3 = 0:8. Setzt man dieses Ergebnis in II0 ein,erh�alt man x2 = 0:6, und damit aus Glei hung I: x1 = 1:0. Die Di hten derdrei Zellarten betragen also 1:0, 0:6 und 0:8 Gramm pro Kubikzentimeter.15.3 Aufgaben1. (Geraden) Im R2 seien die Geraden g1 : �x1 + 2x2 = 2 und g2 : x1 + 2x2 = 6in Normalform (au h Standardform genannt) gegeben.(a) Zei hnen sie die beiden Geraden. (Falls sie ni ht wissen, wie sie anfangen sollen:Su hen sie si h zwei Punkte auf der Geraden, z.B. die S hnittpunkte mit den Ko-ordinatena hsen oder identi�zieren sie x1 mit x und x2 mit y und bringen sie dieGlei hungen dann auf die Ihnen bekannte Form y = mx+ .)(b) S hneiden si h die beiden Geraden? Falls ja, in wel hem Punkt?( ) In wel hen Punkten s hneidet die Gerade g3 : x1� 2x2 = 2 die Geraden g1 undg2 ?(d) Betra hten sie nun no h die Geradens har g4(b) : 2x1 � x2 = b f�ur beliebigeb 2 R . Ist es m�ogli h, b so zu w�ahlen, dass si h die drei Geraden g1, g2 und g4(b)in genau einem Punkt s hneiden? Falls ja: Wel hen Wert m�ussen sie f�ur b w�ahlen?2. (Geraden) Im R2 seien die Punkte P1 = (�1; 2) und P2 = (2; 0) gegeben.(a) Geben sie die Glei hung einer Geraden g1 in Normalform (a11x1 + a12x2 = b1)an, die dur h P1 und P2 verl�auft.(b) Wie lautet die Glei hung der Geraden g2 : a21x1 + a22x2 = b2 , die parallel zug1 dur h den Ursprung (0; 0) verl�auft.( ) Finden sie nun die Glei hung einer Geraden g3 : a31x1 + a32x2 = b3 , diesenkre ht zu g2 ebenfalls dur h den Ursprung verl�auft. �Uberlegen sie si h dazu,warum f�ur die KoeÆzienten aij der beiden Geraden a21a31 + a22a32 = 0 geltenmuss.(d) In wel hem Punkt s hneiden si h die Geraden g1 und g3 ? Sie haben nun von allenPunkten auf der Gerade g1 denjenigen gefunden, der bez�ugli h der Euklidis henNorm j~xj = qP2i=1 x2i den k�urzesten Abstand zum Ursprung hat. Dies de�niertau h den Abstand der Geraden g1 vom Ursprung. Wel hen Abstand hat also g1vom Ursprung?3. (Ebenen) Gegeben sei die Ebene e1 in R3, die die von der x1{A hse und derx2{A hse aufgespannte Ebene in der Geraden x1 + x2 = 2, die von der x1{A hseund der x3{A hse aufgespannte Ebene in der Geraden x1 + x3 = 2 und die vonder x2{A hse und der x3{A hse aufgespannte Ebene in der Geraden x2 + x3 = 2s hneidet.(a) Finden sie eine Glei hung in Normalform f�ur e1 .Weiter seien die Ebenen e2 : �2x1 + x2 � x3 = 4 und e3 : x1 � x3 = 1 gegeben.

15.3. AUFGABEN 219(b) Bestimmen sie den S hnittpunkt der drei Ebenen mittels Gau�elimination. Soll-ten sie in (a) keine L�osung gefunden haben, so verwenden sie f�ur e1 : x1+x2+x3 =2 .4. (Lineare Gei hungen) Gegeben sei das homogene lineare Glei hungssystemx1 + 2x2 + 3x3 = 0 ;4x1 + 5x2 + 6x3 = 0 ;7x1 + 8x2 + 9x3 = 0 :(a) Zeigen sie, dass dieses System keine Punktl�osung, sondern eine Punktmenge alsL�osung hat.(b) Bestimmen sie die L�osungsmenge.5. (Inhomogene Glei hungssysteme) Gegeben sei das inhomogene lineare Glei hungs-system 0BBB� 1 �2 p 01 �2 0 �10 0 1 1 1CCCA �0BBBBBB� x1x2x3x41CCCCCCA = 0BBB� 12�1 1CCCAin Abh�angigkeit des Parameters p aus R.(a) L�osen sie das Glei hungssystem f�ur p = 2 mittels Gau�elimination.(b) L�osen sie das Glei hungssystem f�ur p = 1 mittels Gau�elimination. F�allt Ihnenetwas auf?( )� L�osen sie das Glei hungssystem f�ur beliebiges p .

220 KAPITEL 15. LINEARE GLEICHUNGEN

Kapitel 16MatrizenFragen zur Existenz und Struktur der L�osung von (15.10) k�onnen dur h zwei neuemathematis he Begri�e,Matrix und Determinante, �uberaus kompakt formuliertwerden. Daneben haben diese Konzepte au h eine geometris he Interpretation underlei htern Operationen mit Vektoren, beispielsweise Drehungen und Stre kungenim dreidimensionalen Raum, ganz erhebli h.Matrizen verallgemeinern das Konzept einer Zahl | sie sind so etwas wie \mehrdi-mensionale Zahlen". Addition und Subtraktion von Matrizen folgen den von reellenund komplexen Zahlen her bekannten Re henregeln, bei der Multiplikation und Di-vision treten jedo h vollkommen neue Ph�anomene auf.De�nition (Matrix):Einem�n Matrix A ist ein geordnetes S hema mit m Zeilen und n Spalten,A = 0BBBBBB� a11 a12 : : : a1na21 a22 : : : a2n... ... . . . ...am1 am2 : : : amn
1CCCCCCA : (16.1)Die Gr�o�enaij hei�en Elemente der MatrixA. Stattaij s hreibt man au h(A)ij .In diesem und den n�a hsten zwei Kapiteln werden die Matrixelemente reelle oderkomplexe Zahlen sein, aij 2 R beziehungsweise aij 2 C f�ur alle 1 � i � m und1 � j � n. Im Allgemeinen k�onnen die Matrixelemente jedo h au h Funktionenoder andere mathematis he Objekte (zum Beispiel wiederum Matrizen) sein. Sowerden wir in Kapitel 18 Matrizen, deren Elemente Di�erentialquotienten sind,dazu verwenden, um Funktionen mehrerer Variabler zu untersu hen.In glei her Weise, wie wir reelle und komplexe Zahlen kennengelernt haben, nenntman eine Matrix A eine komplexe Matrix, wenn ihre Komponenten aij komplexeZahlen sind, und eine reelle Matrix, wenn alle Komponenten reell sind.Wie aus (16.1) ersi htli h, bezei hnet der erste Index die Zeilennummer (von obenna h unten gez�ahlt) und der zweite Index die Spaltennummer (von links na h re hts221

222 KAPITEL 16. MATRIZENgez�ahlt). Stimmt der Zeilenindex i mit dem Spaltenindex j �uberein, i = j, so be�n-det man si h auf der Hauptdiagonalen der Matrix.De�nition (Hauptdiagonale):Die Elemente (A)ii hei�en Hauptdiagonalelemente der Matrix A und bildenzusammen die Hauptdiagonale der Matrix.De�nition (Zeilen- und Spaltenvektor):Eine Matrix mit n Spalten und einer Zeile hei�t n-dimensionaler Zeilenvek-tor, ~x = (x11; x12; : : : x1n) � (x1; x2; : : : xn) ; (16.2)eine Matrix mit m Zeilen und einer Spalte m-dimensionaler Spaltenvektor,~y = 0BBBBBB� y11y21...ym11CCCCCCA � 0BBBBBB� y1y2...ym
1CCCCCCA : (16.3)In (16.2) wie (16.3) wurde jeweils in der zweiten Glei hung der in diesem Fall irrele-vante Zeilen- beziehungsweise Spalten-Index weggelassen. S hlie�li h ist eine Matrixmit nur einer Spalte und einer Zeile ein Skalar | eine reelle (komplexe) Zahl.De�nition (Untermatrix):Strei ht man Zeilen und/oder Spalten aus A, so verbleibt eine kleinere Matrix.Alle diese Matrizen werden Untermatrizen von A genannt.De�nition (Transponierte Matrix):Vertaus ht man die Spalten und Zeilen einer MatrixA, so erh�alt man die trans-ponierte Matrix AT , (AT )ij = (A)ji (16.4)Insbesondere kann dur h Transposition ein Spaltenvektor in einen Zeilenvektor�uberf�uhrt werden | und umgekehrt.BEISPIEL: Transposition einer Matrix:A = 0� 1 2 40 5 7 1A =) AT = 0BBB� 1 02 54 7 1CCCA

16.1. QUADRATISCHE MATRIZEN 22316.1 Quadratis he MatrizenEine besondere Rolle spielen Matrizen, bei denen m = n gilt.De�nition (Quadratis he Matrix):Eine Matrix mit glei her Anzahl an Reihen und Spalten, m = n, wird n-reihigequadratis he Matrix oder quadratis he Matrix der Ordnung n genannt.Falls die Ordnung der Matrix ni ht von Bedeutung ist, nennt man die Matrixau h kurz eine quadratis he Matrix.Wi htige quadratis he Matrizen sind Matrizen, f�ur die (A)ij = (A)ji gilt. Diese Ma-trizen sind bez�ugli h der Hauptdiagonalen spiegelsymmetris h und werden deshalbau h symmetris he Matrizen genannt.De�nition (Symmetris he Matrix):Eine n � n-Matrix, f�ur die (A)ij = (A)ji f�ur alle 1 � i; j � n gilt, hei�tsymmetris he Matrix.BEISPIEL:Die Matrix A = 0� a bb 1A ist symmetris h; denn A12 = A21 = b :De�nition (Obere Dreie ksmatrix):Eine quadratis he Matrix A hei�t obere Dreie ksmatrix, wenn aij = 0 f�uralle i > j gilt.Obere Dreie ksmatrizen Matrizen haben also folgende Gestalt:A =
0BBBBBBBBBBBBBBB�a11 a12 a13 : : : a1;n�2 a1;n�1 a1;n0 a22 a23 : : : a2;n�2 a2;n�1 a2;n0 0 a33 : : : a3;n�2 a3;n�1 a3;n... ... ... . . . ... ... ...0 0 0 : : : an�2;n�2 an�2;n�1 an�2;n0 0 0 : : : 0 an�1;n�1 an�1;n0 0 0 : : : 0 0 ann
1CCCCCCCCCCCCCCCA (16.5)De�nition (Untere Dreie ksmatrix):Eine quadratis he Matrix A hei�t untere Dreie ksmatrix, wenn aij = 0 f�uralle i < j gilt.

224 KAPITEL 16. MATRIZENUntere Dreie ksmatrizen Matrizen haben also folgende Gestalt:A =
0BBBBBBBBBBBBBBB�a11 0 0 : : : 0 0 0a21 a22 0 : : : 0 0 0a31 a32 a33 : : : 0 0 0... ... ... . . . ... ... ...an�2;1 an�2;2 an�2;3 : : : an�2;n�2 0 0an�1;1 an�1;2 an�1;3 : : : an�1;n�2 an�1;n�1 0an;1 an;2 an;3 : : : an;n�2 an;n�1 ann
1CCCCCCCCCCCCCCCA (16.6)De�nition (Diagonalmatrix):Eine quadratis he Matrix A hei�t Diagonalmatrix, wenn aij = 0 f�ur alle i 6= jgilt.Bei einer Diagonalmatrix vers hwinden also alle Elemente au�erhalb der Hauptdia-gonalen. Sie haben deshalb folgende Gestalt:
A = 0BBBBBBBBB�a11 0 0 : : : 00 a22 0 : : : 00 0 a33 : : : 0... ... ... . . . ...0 0 0 : : : ann
1CCCCCCCCCA (16.7)Da bei einer Diagonalmatrix na h De�nition aij = 0 f�ur alle i 6= j gilt, ist jedeDiagonalmatrix automatis h symmetris h (aij = aji).De�nition (Einheitsmatrix):Eine n-reihige Diagonalmatrix, deren Diagonalelemente alle Eins sind, hei�t n-reihige Einheitsmatrix und wird mit En bezei hnet.Eine n-reihige Diagonalmatrix hat also die Form
En = 0BBBBBBBBB�1 0 0 : : : 00 1 0 : : : 00 0 1 : : : 0... ... ... . . . ...0 0 0 : : : 1
1CCCCCCCCCA (16.8)Falls die Ordnung n der Einheitsmatrix En eindeutig ist, s hreibt man vereinfa- hend oft au h nur E. Die Eins (1 2 R) selbst kann damit au h als einreihigeEinheitsmatrix verstanden werden.

16.2. RECHENREGELN F�UR MATRIZEN 22516.2 Re henregeln f�ur Matrizen16.2.1 Addition und SubtraktionDe�nition (Addition und Subtraktion von Matrizen):Haben zwei Matrizen A und B jeweils m Zeilen und n Spalten, dann ist ihreSumme komponentenweise de�niert als,(A+B)ij � (A)ij + (B)ij : (16.9)Die Matrix A+B ist also wieder eine m� n-Matrix.BEMERKUNG: Ausges hrieben hat die Summe zweier Matrizen also die FormA+B = 0BBBBBB� a11 + b11 a12 + b12 : : : a1n + b1na21 + b21 a22 + b22 : : : a2n + b2n... ... . . . ...am1 + bm1 am2 + bm2 : : : amn + bmn1CCCCCCA : (16.10)
BEISPIEL:A = 0� 1 20 5 1A ; B = 0� 4 38 7 1A =) A+B = 0� 1 + 4 2 + 30 + 8 5 + 7 1A = 0� 5 58 12 1ABEMERKUNG: Falls die Zahl der Spalten- beziehungsweise Zeilen zweier Matri-zen ni ht �ubereinstimmt, ist ihre Summe ni ht de�niert! So ist beispielsweise derAusdru k (x1; x2) + (y1; y2; y3) ni ht de�niert.BEMERKUNG: F�ur Spaltenvektoren und Zeilenvektoren ergibt (16.10) die aus derVektorre hnung bekannte komponentenweise Addition.Wie die Summe ist au h die Di�erenz zweier Matrizen komponentenweise de�niert:(A�B)ij � (A)ij � (B)ij (16.11)oder A�B = 0BBBBBB� a11 � b11 a12 � b12 : : : a1n � b1na21 � b21 a22 � b22 : : : a2n � b2n... ... . . . ...am1 � bm1 am2 � bm2 : : : amn � bmn1CCCCCCA : (16.12)
BEISPIEL:A=0� 1 20 5 1A ; B=0� 4 38 7 1A =) A�B = 0� 1� 4 2� 30� 8 5� 7 1A = 0� �3 �1�8 �2 1A

226 KAPITEL 16. MATRIZENDe�nition (Nullmatrix):Eine Nullmatrix ist eine m� n-Matrix, bei der alle Komponenten Null sind,0 = 0BBBBBB� 0 0 : : : 00 0 : : : 0... ... . . . ...0 0 : : : 01CCCCCCA : (16.13)
De�nition (�Aquivalenz zweier Matrizen):Zwei m� n-Matrizen, A und B, hei�en genau dann glei h (A = B), wenn ihreDi�erenz die Nullmatrix ergibt, A�B = 0.Zwei Matrizen sind also genau dann identis h, wenn sie komponentenweise �uberein-stimmen:A = B() aij = bij f�ur alle 1 � i � m und alle 1 � j � n : (16.14)BEMERKUNG: Sind A und B n � m-Matrizen, m�ussen also n � m Glei hungenerf�ullt sein.Mit den bisherigen De�nitionen k�onnen Matrizen bez�ugli h Addition und Subtrak-tion genauso behandelt werden wie reelle Zahlen. Wie aber kann die Multiplikationvon Matrizen sinnvoll de�niert werden?16.2.2 Multiplikation einer Matrix mit einem SkalarBildet man mit (16.10) die Summe A +A, so erh�alt man aij + aij = 2(aij), wasman au h als die i; j-Komponente einer neuen Matrix 2A interpretieren kann. Ver-allgemeinert man dies auf beliebige Vielfa he, so erh�alt manDe�nition (Multiplikation einer Matrix mit einem Skalar):Die Matrix A sei einem�n Matrix, und � 2 C. Dann ist das �-fa he Vielfa heder Matrix A de�niert als�A = 0BBBBBB� �a11 �a12 : : : �a1n�a21 �a22 : : : �a2n... ... . . . ...�am1 �am2 : : : �amn1CCCCCCA mit � 2 C : (16.15)
Das �-fa he Vielfa he einer Matrix A ist also eine Matrix �A, deren Elemente das�-fa he Vielfa he der betre�enden Elemente aij der Ausgangsmatrix sind,(�A)ij = � � aij : (16.16)

16.2. RECHENREGELN F�UR MATRIZEN 227BEMERKUNG: Im Folgenden wird � meist eine reelle Zahl sein, do h werden wirvon Zeit zu Zeit au h die Multiplikation einer Matrix mit einer komplexen Zahlbetra hten.Falls die Matrix nur eine Zeile hat, also ein Zeilenvektor ist, reduziert si h (16.15)auf die bekannte Multiplikation eines Vektors ~x mit einem Skalar �,�(x1; x2; : : : ; xn) = (�x1; �x2; : : : ; �xn) : (16.17)Entspre hendes gilt f�ur die Multiplikation eines Spaltenvektors mit �.16.2.3 Multiplikation eines Vektors mit einer MatrixWie multipliziert man eine Matrix mit einer anderen Matrix? Was soll man si h�uberhaupt unter der Multiplikation zweier Matrizen vorstellen?Zur Beantwortung dieser Frage betra hten wir in einem ersten S hritt die Multi-plikation eines m-dimensionalen Spaltenvektors (x1; x2; : : : ; xm)T mit einer n�m-Matrix A und legen fest:De�nition (Multiplikation eines Vektors mit einer Matrix):Der m-dimensionale Spaltenvektor (x1; x2; : : : ; xm)T und die n �m-Matrix Aseien vorgegeben. Dann ist ihr Produkt A~x ein n-dimensionaler Spaltenvektor~y, ~y = A~x ; (16.18)der komponentenweise wie folgt de�niert ist:yi = mXj=1 aijxj f�ur alle 1 � i � n : (16.19)BEMERKUNG: F�ur n 6= m unters heiden si h ~x und ~y in ihrer Dimension. Ist dieMatrix A beispielsweise eine 3�2-Matrix, kann man mit ihr einen 2-dimensionalenVektor multiplizieren und erh�alt dabei einen 3-dimensionalen Vektor.S hreibt man die Summen in (16.19) aus, erh�alt many1 = a11x1 + a12x2 + : : : + a1mxmy1 = a21x1 + a22x2 + : : : + a2mxm... = ... ... . . . ...yn = an1x1 + an2x2 + : : : + anmxm (16.20)Daraus folgt:Notiz:Mit Hilfe der De�nitionen (16.18) und (16.19) kann das lineare Glei hungssystem(15.10) kompakt als A~x = ~b ges hrieben werden.BEMERKUNG: F�ur Interessierte: Falls eine zur Matrix A inverse Matrix B gefun-den werden kann, das hei�t eine Matrix B, f�ur die BA = E gilt, dann ist die L�osung

228 KAPITEL 16. MATRIZENdes Glei hungssystems A~x = ~b dur h ~x = B~b gegeben. Damit w�are also die L�osungeines Systems linearer Glei hungen auf einen S hlag errei ht! Im Moment wissenwir allerdings no h ni ht, wie man Matrizen miteinander multipliziert, ges hweigedenn, wie man die zu einer Matrix A inverse Matrix A�1 bestimmt. In Kapitel 17werden wir auf diesen Punkt zur�u kkommen.16.2.4 Ein Spezialfall: Das Skalarprodukt zweier VektorenAls Beispiel betra hten wir nun die Multiplikation zweier reellwertiger Vektoren ~yund ~x. In der S hule haben Sie diese Operation s hon als Skalarprodukt < ~y; ~x >kennengelernt. Dies kann man im Rahmen der Matrizenre hnung als Produkt einesSpaltenvektors ~x mit einem Zeilenvektor ~y interpretieren,< ~y; ~x > = mXj=1 yjxj = (y1; y2; : : : ; ym) 0BBBBBB� x1x2...xm1CCCCCCA (16.21)
BEMERKUNG: Um das Skalarprodukt �uberhaupt bilden zu k�onnen, m�ussen dieVektoren ~x und ~y die glei he Dimension haben.Das Skalarprodukt ist na h De�nition kommutativ,< ~x; ~y >=< ~y; ~x > ; (16.22)und kann dazu verwendet werden, die Euklidis he Norm j~xj eines Vektors ~x (dashei�t: seine L�ange) festzulegen,j~xj = (< ~x; ~x >)1=2 =vuut mXj=1 x2j : (16.23)Falls ~y ein positives Vielfa hes von ~x ist, yi = �xi mit � > 0, so f�uhrt (16.23) aufj~yj = �j~xj und (16.21) auf < ~y; ~x >= j~yjj~xj = �j~xj2.F�ur allgemeine Vektoren ~y und ~x gilt yi = �xi ni ht, und damit au h ni ht< ~y; ~x >= j~yjj~xj,jedo h immer die Unglei hung �j~yjj~xj � <~y; ~x> � j~yjj~xj (Cau hy-S hwarz Unglei- hung). Man kann weiterhin zeigen, dass in zwei Dimensionen f�ur den von beidenVektoren einges hlossenen Winkel � gilt:< ~y; ~x > = j~yjj~xj os(�) : (16.24)In h�oheren Dimensionen wird die Beziehung (16.24) dazu benutzt, den Winkel zwi-s hen zwei Vektoren zu de�nieren:De�nition (Winkel zwis hen zwei Vektoren):Der Winkel � zwis hen zwei Vektoren ~x; ~y 2 Rn ist de�niert als� = ar os�< ~y; ~x >j~yjj~xj � : (16.25)

16.2. RECHENREGELN F�UR MATRIZEN 229BEMERKUNG: Bedenkt man, dass zwei Vektoren au h in h�oherdimensionalenR�aumen eine Ebene aufspannen, kann man die obige De�nition auf die im zwei-dimensionalen Fall zur�u kf�uhren.Aus dieser De�nition folgt au h in h�oheren Dimensionen:Satz und De�nition (Orthogonalit�at):Zwei Vektoren stehen genau dann senkre ht aufeinander, wenn ihr Skalarpro-dukt vers hwindet. Sie werden dann au h orthogonal genannt.BEISPIEL:Die Vektoren ~x und ~y im dreidimensionalen Raum seien als ~x = (1; 2; 0) und~y = (2; 1; 3) gegeben. Dann hat ~x die L�ange j~xj = p12 + 22 + 02 = p5und ~y die L�ange j~yj = p22 + 12 + 32 = p14. F�ur ihr Skalarprodukt gilt< ~y; ~x >= 2 � 1 + 1 � 2 + 3 � 0 = 4. Daraus ergibt si h f�ur den Winkel �zwis hen ~x und ~y: � = ar os(4=p5 � 14) � 61:40.BEMERKUNG: Die De�nition (16.21) bezog si h auf reellwertige Vektoren. Willman das Skalarprodukt | und insbesondere das Konzept Norm | auf Vektoren ~yund ~x mit komplexwertigen Komponenten yi; xi 2 C �ubertragen, so verallgemeinertman (16.21) zu < ~y; ~x > = mXj=1 �yjxj = < ~x; ~y > ; (16.26)wobei �z die zu z komplex konjugierte Zahl bezei hnet. Aus (16.26) folgt, dass dasSkalarprodukt nun ni ht mehr symmetris h ist. Weiter folgt aus (16.26) f�ur dieNorm eines komplexwertigen Vektors ~x:j~xj = (< ~x; ~x >)1=2 =vuut mXj=1 �xjxj =vuut mXj=1 jxj j2 : (16.27)BEISPIELE:F�ur m = 1 ist ~x eine `gew�ohnli he' komplexe Zahl ~x = a+ ib 2 C1 = C.Na h (16.27) gilt f�ur ihre Norm j~xj = p(a� ib)(a+ ib) = pa2 + b2.Diese Norm ist identis h mit dem in Kapitel 11.4 eingef�uhrten Betrag einerkomplexen Zahl.Wir wollen no h ein konkretes Zahlenbeispiel betra hten, ~x = (i; 1� i). Hiergilt: j~xj =pjij2 + j1� ij2 =p(�i)(i) + (1 + i)(1� i) = p1 + 2 = p316.2.5 Geometris he Interpretation der Multiplikation einesVektors mit einer MatrixZweidimensionale Systeme:y1 = a11x1 + a12x2y2 = a21x1 + a22x2 (16.28)In Kapitel 15 hatten wir derartige Systeme zweier linearer Glei hungen mit vorge-gebenem ~y | dort mit ~b bezei hnet | betra htet und uns die Frage gestellt, wel he~x die Glei hungen l�osen.

230 KAPITEL 16. MATRIZENNun wollen wir eine andere Betra htung anstellen: ~x und ~y k�onnen als Vektoren imzweidimensionalen Raum aufgefa�t werden | sei weisen vom Ursprung zum Punkt(x1; x2) beziehungsweise (y1; y2). Glei hung (16.28) bes hreibt dann eine (lineare)geometris he Operation, die jedem vorgegebenem ~x ein bestimmtes ~y zuordnet.Wel he speziellen Operationen kann A bes hreiben?Beginnen wir mit der einfa hsten Operation, der skalaren Multiplikation von ~x miteinem reellen Faktor �,~y = �~x das hei�t yi = �xi f�ur i = 1; 2 : (16.29)Jede Komponente xi von ~x wird also um den Faktor � vergr�o�ert oder verkleinert| geometris h bedeutet dies eine Stre kung von ~x um den Faktor �.Wir k�onnen diese Operation mit (16.28) bes hreiben, indem wir A = �E2 setzen,~y = �E2 ~x = 0� � 00 � 1A~x : (16.30)Im Spezialfall � = 1 bleibt der Vektor unver�andert, ~y = ~x. F�ur � > 1 erhaltenwir eine Stre kung, f�ur 0 < � < 1 eine Stau hung. Der Fall � < 0 entspri ht einerSpiegelung des Vektors am Ursprung, wobei er si h f�ur j�j < 1 verk�urzt, und f�urj�j > 1 verl�angert. Bere hnet man na h (16.25) den von ~x und �~x einges hlossenenWinkel, erh�alt man � = 0 f�ur � > 0 und � = � f�ur � < 0. (Zur �Ubung sehrempfohlen!)Neben den bisher betra hteten Operationen kann man einen Vektor au h um einenvorgegebenen Winkel um den Ursprung drehen. Dur h wel hen Typus von Matrixwird eine sol he Drehung repr�asentiert?Bei gegebenem Drehwinkel erh�alt man aus den Additionstheoremen f�ur Sinus undCosinus (siehe au h Abbildung 10.7 in Kapitel 10.2.5):y1 = os( )x1 � sin( )x2 ; (16.31)y2 = sin( )x1 + os( )x2 : (16.32)Damit erh�alt man f�ur die Drehmatrix D( ) in Abh�angigkeit vom Drehwinkel D( ) = 0� os( ) � sin( )sin( ) os( ) 1A : (16.33)SELBSTTEST: Zeigen Sie, dass ein gedrehter Vektor ~y = D( )~x die glei he L�angewie der Ausgangsvektor ~x hat.SELBSTTEST: Verglei h einer Drehung in zwei Dimensionen mit der Multiplikationzweier komplexer Zahlen: z1 und z2 seien zwei komplexe Zahlen. Multipliziert mandiese beiden Zahlen, so erh�alt man eine dritte komplexe Zahl z3 = z2z1, deren Real-und Imagin�arteil na h Kapitel 11.5 aus den Real- und Imagin�arteilen von z1 und z2bere hnet werden kann. Nun wollen wir z1 und z3 als Vektoren in der Gau�s henZahlenebene au�assen, z1 = (x1; y1) und z3 = (x3; y3). Versu hen Sie, die vierKomponenten einer 2 � 2-Matrix A so zu bestimmen, dass z3 = Az1 gilt. Wieh�angen die Komponenten Aij mit dem Real- und Imagin�arteil von z2 zusammen?

16.2. RECHENREGELN F�UR MATRIZEN 231
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
x
x
y
y
2
1 1
2
γ
x
y
Abbildung 16.1: Drehung eines VektorsWas ges hieht s hlie�li h, wenn man die beiden Komponenten von ~x mit zwei unter-s hiedli hen Faktoren � 6= � multipliziert? Diese Situation entspri ht der Glei hung~y = 0� � 00 � 1A~x (16.34)mit � 6= �. Da jede Komponente mit einem unters hiedli hen Faktor multipliziertwird, kann ~y ni ht mehr parallel zu ~x liegen. Dies veri�ziert man lei ht, indemman wiederum den von ~x und ~y einges hlossenen Winkel mit (16.25) bere hnet.Weiterhin werden f�ur allgemeine Werte von � und � die Normen j~yj und j~xj ni ht�ubereinstimmen. Wie interpretieren Sie diese Operation geometris h?Dreidimensionale Systeme:Wir verallgemeinern (16.28) von zwei auf drei Dimensionen und erhalteny1 = a11x1 + a12x2 + a13x3y2 = a21x1 + a22x2 + a23x3y3 = a31x1 + a32x2 + a33x3 (16.35)Die Gr�o�en ~x = (x1; x2; x3) und ~y = (y1; y2; y3) k�onnen nun als Vektoren im drei-dimensionalen Raum R3 interpretiert werden.Wie in zwei Dimensionen bes hreibt A = �E3 eine Stre kung mit Stre kfaktor �.Dur h wel hen Typus von Matrix werden nun Drehungen repr�asentiert? Um dieseFrage zu vereinfa hen, betra hten wir zun�a hst Drehungen um die Ho ha hse, sodass y3 = x3 gilt.Die gesamte Drehung spielt si h also in der zur Ho ha hse senkre hten Ebene ab.Damit h�angen y1 und y2 in glei her Weise von x1 und x2 ab wie im zweidimensio-nalen Fall.
232 KAPITEL 16. MATRIZENSetzt man dies zusammen mit der Bedingung y3 = x3 in (16.35) ein, so erh�alt manf�ur D3, die Drehmatrix um die Ho ha hse in Abh�angigkeit vom Drehwinkel D3( ) = 0BBB� os( ) � sin( ) 0sin( ) os( ) 00 0 1 1CCCA : (16.36)Entspre hend ergibt si h f�ur die Drehmatrizen um die beiden anderen Koordina-tena hsen: D1(�) = 0BBB� 1 0 00 os(�) � sin(�)0 sin(�) os(�) 1CCCA (16.37)und D2(�) = 0BBB� os(�) 0 sin(�)0 1 0� sin(�) 0 os(�) 1CCCA : (16.38)Da eine Drehung eines Vektors um den Winkel Null den Vektor ni ht ver�andert,muss gelten: D1(0) = D2(0) = D3(0) = E : (16.39)Drehmatrizen weisen diese Eigens haft auf, wie (16.36) bis (16.38) zeigen.16.2.6 Multiplikation zweier MatrizenDie Multiplikation eines l-dimensionalen Vektors ~x mit einer m� l Matrix A ergibteinen m-dimensionalen Vektor ~y = A~x. Multipliziert man diesen Vektor mit einern�m Matrix B, so ergibt si h ein n-dimensionaler Vektor ~z = B~y:yj = lXi=1 ajixi f�ur alle 1 � j � m (16.40)zk = mXj=1 bkjyj f�ur alle 1 � k � n (16.41)Der gesamte Vorgang kann jedo h au h als eine einzige Operation aufgefasst werden,die den Vektor ~x direkt mit Hilfe einer neuen n � l Matrix C auf den Vektor ~zabbildet, zk = lXi=1 kixi f�ur alle 1 � k � n : (16.42)Wie bere hnet si h die Matrix C aus A und B?Setzt man (16.40) in (16.41) ein, so erh�alt man na h Vertaus hung der Summatio-nen: zk = mXj=1 bkj lXi=1 ajixi = lXi=1[ mXj=1 bkjaji℄xi f�ur alle 1 � k � n : (16.43)

16.2. RECHENREGELN F�UR MATRIZEN 233Soll (16.43) mit (16.42) f�ur beliebige Vektoren ~x �ubereinstimmen, folgt ki = mXj=1 bkjaji f�ur alle 1 � i � l und 1 � k � n : (16.44)Glei hung (16.44) de�niert die Multiplikation zweier Matrizen A und B:De�nition (Produkt zweier Matrizen):Die Matrix A sei eine m � l-Matrix, die Matrix B eine n � m-Matrix. DasProdukt beider Matrizen, C = BA ; (16.45)ist komponentenweise de�niert als ki = mXj=1 bkjaji f�ur alle 1 � i � l und 1 � k � n : (16.46)Diese De�nition verallgemeinert (16.18) und (16.19), die nun als ein Spezialfallinterpretiert werden k�onnen, in dem die Matrix A in (16.45) ein Spaltenvektor ist.BEISPIEL:B = 0� 1 0 12 1 0 1A A = 0BBB� 2 0 11 0 11 1 0 1CCCA ) BA = 0� 3 1 15 0 3 1ADies kann man si h mit dem folgenden S hema verdeutli hen:i = 1 2 32 0 11 0 11 1 0k = 1 1 0 1 3 1 1k = 2 2 1 0 5 0 3Na h (16.44) erh�alt man das Element ki der Produktmatrix C=BA, in-dem man im obigen S hema die links von der Stelle (k; i) stehende Zeileder Matrix B mit der oberhalb der glei hen Stelle stehende Spalte derMatrix A multipliziert. Im S hema ist dies f�ur (k; i) = (1; 2) fett gedru kt.Eine (sehr) kurze Merkregel lautet deshalb: \Zeile mal Spalte" | dasElement C12 ist das Produkt der 1. Zeile von B und der 2. Spalte von A.BEISPIEL: Nahrungskette in einem �OkosystemWir betra hten eine Nahrungskette aus drei Gliedern:1. Glied: 2 P anzenarten: P1, P2

234 KAPITEL 16. MATRIZEN2. Glied: 3 P anzenfresser: T1, T2, T33. Glied: 2 Fleis hfresser: F1, F2Aus experimentellen Daten kann man nun zwei Matrizen zur Bes hreibungder Nahrungskette gewinnen: Die Elemente aji der Matrix A geben an,wel he Menge von P anzen der Art Pi von jedem P anzenfresser der ArtTj pro Zeiteinheit (z.B. pro Wo he) gefressen wird. Die Elemente bkj derMatrix B geben an, wieviele Tiere der Art Tj von jedem Fleis hfresser derArt Fk gefressen werden.Stellt man si h nun die Frage, wel he Menge der P anzenart Pi jederFleis hfresser der Art Fk indirekt �uber die Tierarten T1, T2 und T3 fri�t,erh�alt man das Ergebnis dur h Multiplikation der k-ten Zeile von B mit deri-ten Zeile von A. Dies ist na h (16.44) genau das Element ki der MatrixC = BA.BEMERKUNG: Glei hung (16.44) zeigt, dass zwei Matrizen nur dann multipliziertwerden k�onnen, wenn die Zahl der Zeilen der ersten Matrix (hier: A) mit der Zahlder Spalten der zweiten Matrix (hier: B) �ubereinstimmt!Einige extrem wi htige Bemerkungen:Sei A eine m � l Matrix, und B eine n � m-Matrix, dann ist na hder letzten Bemerkung das Produkt BA de�niert. Weiterhin ist dieMatrix BA eine n� l-Matrix.Das Produkt AB ist jedo h nur dann de�niert, wenn zus�atzli hn = l gilt! Die Matrix AB ist in diesem Fall eine m �m Matrix, dieMatrix BA eine n � n Matrix. F�ur l = n 6= m gilt daher mit Si her-heit AB 6= BA. Do h selbst f�ur l = n = m ist im Allgemeinen AB 6= BA.Das Produkt zweier Matrizen ist also im Gegensatz zum Produktreeller oder komplexer Zahlen ni ht kommutativ! Falls AB 6= BA sagtman au h: die Matrizen A und B vertaus hen ni ht.Bea hten Sie weiterhin, dass aus der Glei hung BA = 0 ni ht folgt,dass A = 0 oder B = 0. Damit folgt aus AC = AD au h ni ht, dassC = D.BEISPIEL:Zwei Matrizen A und B seien gegeben alsA = 0� 1 00 0 1A ; B = 0� 0 01 0 1A : (16.47)Dann giltAB = 0� 1 00 0 1A0� 0 01 0 1A = 0� 0 00 0 1A = 0 ; (16.48)aber BA = 0� 0 01 0 1A0� 1 00 0 1A = 0� 0 01 0 1A = B : (16.49)

16.2. RECHENREGELN F�UR MATRIZEN 235Selbst die beiden einfa hen Matrizen A und B vertaus hen also ni ht!Im obigen Beispiel gilt weiterhin:A2 = AA = 0� 1 00 0 1A0� 1 00 0 1A = 0� 1 00 0 1A = A (16.50)Das Quadrat von A ist also identis h mit A. Trotzdem darf daraus ni htA = E gefolgert werden!S hlie�li h erh�alt man no h:B2 = BB = 0� 0 01 0 1A0� 0 01 0 1A = 0� 0 00 0 1A = 0 (16.51)Obwohl die Matrix B von der Nullmatrix vers hieden ist, vers hwindet den-no h ihr Quadrat!BEMERKUNG: F�ur Interessierte: Matrizen und Quantenme hanik: In HeisenbergsInterpretation der Quantenme hanik wird der Zustand eines Systems dur h einenVektor ~ , eine physikalis he Messung dur h eine Matrix M dargestellt. F�uhrt manam System eine Messung dur h, entspri ht dies der Multiplikation des Vektors ~ mit der dieser Messung entspre henden Matrix M. Dadur h geht der Zustand desSystems von ~ na h M~ �uber. F�uhrt man hintereinander zwei dur h die MatrizenM undN repr�asentierte Messungen aus, entspri ht dies je na h der Reihenfolge ~ !NM~ oder ~ !MN~ . Die beiden MatrizenM undN vertaus hen im Allgemeinenni ht. Deshalb h�angt das Me�ergebnis von der Reihenfolge der Messungen ab. Diesist der Kern der Heisenbergs hen Uns h�arferelation.Es kommt jedo h au h vor, dass Matrizenmultiplikationen einfa he Ergebnisse lie-fern. Betra hten wir beispielsweise zwei aufeinander folgende Drehungen um diex1-A hse, wobei die erste den Winkel �1 habe, die zweite den Winkel �2. Dannf�uhrt (16.37) aufD1(�2)D1(�1) = 0BBB� 1 0 00 os(�2) � sin(�2)0 sin(�2) os(�2) 1CCCA0BBB� 1 0 00 os(�1) � sin(�1)0 sin(�1) os(�1) 1CCCA= 0BBB� 1 0 00 os(�2 + �1) � sin(�2 + �1)0 sin(�2 + �1) os(�2 + �1) 1CCCA = D1(�2 + �1) ;(16.52)wobei im S hritt na h der Matrixmultiplikation die Additionstheoreme f�ur Sinusund Cosinus angewandt wurden.Zwei Drehungen um die glei he Rauma hse entspre hen also genau einer Drehungum den Summenwinkel. Zwei Drehmatrizen mit der glei hen Dreha hse vertaus henalso: D1(�2)D1(�1) = D1(�2 +�1) = D1(�1 +�2) = D1(�1)D1(�2). Dies ist au hintuitiv klar, da es keinen Unters hied ma ht, einen K�orper zuerst um den Winkel�1 und ans hlie�end um den Winkel �2 zu drehen, oder zuerst um den Winkel �2und dann um den Winkel �1 | allerdings nur, wenn die Drehung um die glei heA hse ausgef�uhrt wird. Im allgemeinen vertaus hen zwei Drehmatrizen jedo h ni ht,wie Sie dur h Na hre hnen direkt veri�zieren k�onnen.

236 KAPITEL 16. MATRIZEN16.2.7 Re henregeln der MatrizenmultiplikationAssoziativit�at:Aus der De�nition (16.44) des Produktes zweier Matrizen folgt:C(BA) = (CB)A (16.53)Damit die einzelnen Matrixprodukte de�niert sind, m�ussen die entspre hendenSpalten- und Zeilenzahlen �ubereinstimmen. Falls also B eine m� n-Matrix ist,so muss A n Zeilen und C m Spalten besitzen.Fehlende Kommutativit�at:Wie s hon erw�ahnt, ist die Matrixmultiplikation ni ht kommutativ:BA 6= AB (Keine Kommutativit�at) (16.54)Es gilt jedo h (BA)T = ATBT (16.55)wie man dur h Einsetzen in (16.44) veri�ziert.Wirkung der Einheitsmatrix:Bezei hnet Ek die k-reihige Einheitsmatrix, und ist A eine m�n-Matrix, so giltEmA = A = AEn (16.56)Wirkung der Nullmatrix:Bezei hnet 0k die k-reihige Nullmatrix, und ist A eine m� n-Matrix, so gilt0mA = 0 = A0n (16.57)Distributivit�at:Addition und Multiplikation von Matrizen h�angen wie folgt zusammen:(C+B)A = CA+BA und C(B+A) = CB+CA (16.58)Au h hier m�ussen die jeweiligen Zeilen- und Spaltenzahlen passen. Wenn A einem � n-Matrix ist, m�ussen C und B jeweils m Spalten haben und in der Zahlihrer Reihen �ubereinstimmen.BEMERKUNG: Da die Matrixmultiplikation ni ht kommutativ ist (16.54), darfman bei der Verwendung des Distributivgesetzes die einzelnen Terme ni ht vertau-s hen: CA+BA = (C+B)A 6= A(C+B) = AC+AB.Wie kann man s hlie�li h die zu einer Matrix A inverse Matrix A�1 bestimmen?F�ur Drehmatrizen ist dies relativ einfa h: Aus (16.52) und (16.39) folgtD1(��)D1(�) = D1(��+ �) = D1(0) = E : (16.59)Damit gilt [D1(�)℄�1 = D1(��) : (16.60)Dieses Ergebnis ist au h ans hauli h verst�andli h: Die zu einer Drehmatrix inverseMatrix ist die Matrix, die einer Drehung um den negativen Drehwinkel entspri ht.Um allgemeinere Matrizen zu invertieren, ben�otigen wir jedo h das Konzept derDeterminante, das im n�a hsten Abs hnitt behandelt wird.

16.3. AUFGABEN 23716.3 Aufgaben1. (Re henregeln f�ur Matrizen) Gegeben seien die Matrizen A = 0� 2 31 �2 1A,B = 0� 1 33 �7 1A , C = 0� 2 �1 03 1 1 1A und D = 0BBB� 4 1�2 21 3 1CCCA .Bere hnen sie (falls de�niert):(a) AT , BT , CT , DT . Wel he der Matrizen sind symmetris h?(b) A+B , B� 2A , A+C , C+D , 3CT +D .( ) AB�BA , AC , CA , CTA , CD , DC , CD�DC .2. (Matrizen) Eine Matrix P , die die Glei hung P = P � P = P2 erf�ullt, wirdProjektionsmatrix genannt. (K�onnen sie si h vorstellen, warum man Matrizen mitdieser Eigens haft so nennt?)(a) Wel he der folgenden Matrizen sind Projektionsmatrizen?(i) A = 0� 1 00 0 1A , (ii) 2A , (iii) B = 0� 1 22 �1 1A , (iv) 03 = 0BBB� 0 0 00 0 00 0 0 1CCCA , (v)En .(b) F�ur wel he �; � aus R ist 0� � 00 � 1A eine Projektionsmatrix?( ) F�ur wel hes a aus R ist 0� a aa a 1A eine Projektionsmatrix?(d) Verans hauli hen sie si h die Wirkung der in (b) und ( ) gefundenen Matrizen,indem sie sie mit dem Vektor ~x = 0� x1x2 1A multiplizieren.3. (Matrizen) Im Wintersemester haben sie gelernt, dass man si h die Multiplika-tion einer komplexen Zahl mit einer weiteren komplexen Zahl als Drehstre kungverans hauli hen kann (siehe Abbildung 2 in Kapitel 10 des Skriptums).Versu hen sie nun eine Matrix zu �nden, die die Multiplikation mit einer komplexenZahl z1 = jz1j exp[iarg (z1)℄ in der Gau�s hen Zahlenebene bes hreibt.Genauer: Mit wel her Matrix Z1 m�ussen sie die komplexe Zahl z2 = 0� x2y2 1A mul-tiplizieren, um z3 = z1z2 = Z1z2 = 0� x3y3 1A zu erhalten? Dabei bezei hnen xi und

238 KAPITEL 16. MATRIZENyi jeweils den Real- und Imagin�arteil der komplexen Zahl zi .4. (Matrizen) Funktionen von Matrizen: Funktionen, die als Potenzreihe dar-gestellt werden k�onnen (f(x) =P1k=0 akxk), lassen si h au h f�ur quadratis he Ma-trizen als Argument de�nieren, indem man einfa h die Matrix anstelle von x in diePotenzreihe einsetzt. (Die Beziehung x0 = 1 verallgemeinert si h zu A0 = En f�urn� n Matrizen A.)Gegeben seien die Matrizen A = 0� 1 00 2 1A , B = 0� �1 00 �2 1A , mit �1;2 2 R undC = 0� 0 �=30 0 1A .(a) Bere hnen sie f(A) , f(B) und f(C) f�ur (i) f(x) = x2 und (ii) f(x) = x� x3 .(b) Bere hnen sie f�ur A , B und C die Exponentialfunktion, den Sinus und denCosinus.( ) Bere hnen sie exp0� 0 ii 0 1A .5. (Matrizen) Drehungen: Aus der Vorlesung kennen sie die DrehmatrizenD1(�) = 0BBB� 1 0 00 os(�) � sin(�)0 sin(�) os(�) 1CCCA und D2(�) = 0BBB� os(�) 0 sin(�)0 1 0� sin(�) 0 os(�) 1CCCAf�ur Drehungen um die x1 beziehungsweise x2 A hse.(a) Bere hnen sie D21(�; �) def= D2(�) �D1(�) und D12(�; �) def= D1(�) �D2(�) f�ur� = � und � = �=2 . Sie bestimmen somit die Matrizen der Abbildungen, die sieerhalten, wenn sie zum einen zuerst um die x1 A hse um den Winkel � und dannum die x2 A hse um den Winkel �=2 drehen (D21) und zum anderen wenn sie dieReihenfolge der Drehungen vertaus hen (D12).(b) Bere hnen sie D12(�; �) und D21(�; �) f�ur � = �=3 und � = �=6 .( ) Bere hnen sie D12(�; �) und D21(�; �) f�ur beliebige � und � . F�ur wel he � , �sind die beiden Matrizen glei h?6. (Matrizen) Skalarprodukt: Gegeben seien die Vektoren~x = 0BBB� 123 1CCCA ; ~y = 0BBB� 210 1CCCA ; ~z = 0BBB� 40�3 1CCCA und ~k = 0BBB� 1i1� i 1CCCA :(a) Bere hnen sie die L�ange aller vier Vektoren.

16.3. AUFGABEN 239(b) Wel hen Winkel s hlie�en jeweils ~x und ~y , ~y und ~z sowie ~x und ~z ein?( ) Es gilt < ~x; ~y > = j~xjj~yj os(�(~x; ~y))= j~xj(Projektion von ~y auf ~x)= j~yj(Projektion von ~x auf ~y) :Dabei bezei hnet �(~x; ~y) den von ~x und ~y einges hlossenen Winkel. Wie gro� istalso die Komponente von ~x in Ri htung von ~y und ~z ?7. (Kreuz- und Spatprodukt) Wie sie aus der S hule wissen, kann man in drei Di-mensionen ein Kreuzprodukt (au h Vektorprodukt oder �au�eres Produkt genannt)~ = ~a�~b zweier Vektoren ~a und ~b als Vektor, der senkre ht auf der dur h ~a und ~baufgespannten Ebene steht, und dessen L�ange j~a�~bj = j~ajj~bj sin(�(~a;~b)) die Fl�a hedes von ~a und ~b gebildeten Parallelogramms angibt, de�nieren. Eine Regel, na hder man das Kreuzprodukt bere hnen kann, ist~a�~b = det0BBB� ~e1 ~e2 ~e3a1 a2 a3b1 b2 b3 1CCCA = det0� a2 a3b2 b3 1A~e1�det0� a1 a3b1 b3 1A~e2+det0� a1 a2b1 b2 1A~e3 :(16.61)Dabei bezei hnen die ~ei die Einheitsvektoren im kartesis hen System, d.h.~e1 = 0BBB� 100 1CCCA ; ~e2 = 0BBB� 010 1CCCA und ~e3 = 0BBB� 001 1CCCA :(a) Bere hnen sie ~x�~y , ~y�~x und ~x�~z f�ur die Vektoren ~x ; ~y und ~z aus Aufgabe 6.Dur h die Kombination von Vektor- und Skalarprodukt erh�alt man das sogenannteSpatprodukt ~a � (~b�~ ) , wel hes das Volumen eines dur h die Vektoren ~a;~b und ~ gebildeten Parallelepipeds angibt. (Ein Parallelepiped ist ein in eine oder mehrereRi htungen s hiefer Quader.)(b) Zeigen sie, dass man das Spatprodukt wie folgt bere hnen kann:~a � (~b� ~ ) = det0BBB� a1 a2 a3b1 b2 b3 1 2 3 1CCCA : (16.62)( ) Bere hnen sie ~x � (~y � ~z) f�ur die Vektoren ~x ; ~y und ~z aus Aufgabe 6.8. (Matrizen) Adjungierte Matrix(a) Einleitendes Beispiel: Bere hnen sie f�urA = 0� 1 12 1 1A ; ~x = 0� �12 1A und ~y = 0� 34 1A

240 KAPITEL 16. MATRIZENdie Skalarprodukte < ~x;A~y >, < ~x;AT ~y >, < A~x; ~y >, < AT~x; ~y >, < ~y;A~x >,< ~y;AT~x >, < A~y; ~x > und < AT ~y; ~x >. Wel he dieser Ausdr�u ke sind jeweilsglei h?Eine n � n Matrix Ay hei�t zu A adjungiert, falls < Ay~x; ~y >=< ~x;A~y > f�uralle ~x; ~y 2 Rn gilt. Sind die beiden Matrizen glei h, also A = Ay, so nennt man Aselbstadjungiert.(b) Zeigen sie, dass f�ur reelle A gilt: Ay = AT .( ) Wie erh�alt man Ay aus A, falls A komplexe Komponenten enth�alt?

Kapitel 17Determinanten, Cramers heRegel und EigenwertproblemEnts heidend f�ur die Existenz einer eindeutigen L�osung eines Systems zweier linea-rer Glei hungen A~x = ~b in Abs hnitt 15.2 ist, dass eine bestimmte Kombinationder Elemente der Matrix A, ni ht vers hwindet. Dies tri�t au h auf Systeme mitdrei und mehr linearen Glei hungen zu. Au h hier kann aus den Komponenten einerquadratis hen Matrix A eine Zahl, die Determinante gebildet werden, die dar�uberAuskunft gibt, ob das Glei hungssystem genau eine L�osung hat. Die Determinanteerm�ogli ht es dann au h, die L�osung sehr kompakt zu s hreiben.Die Determinante kann auf mehrere Arten de�niert werden. Wir stellen eine allge-meine rekursive De�nition vor, aus der man lei ht die Determinante einer 2 � 2-oder einer 3� 3-Matrix gewinnt | die f�ur diese Vorlesung wi htigsten Matrizen.De�nition (Lapla e-Entwi klung einer Determinante):Die Determinante det(A) einer n� n-Matrix A ist f�ur n = 1 dur h A selbstgegeben, f�ur n > 1 dur h det(A) = nXj=1 aijCij : (17.1)Hierbei ist der Kofaktor Cij alsCij = (�1)i+jMij ; (17.2)de�niert. Der Minor Mij ist die Determinante derjenigen Untermatrix von A,die man dur h Strei hen der i-ten Zeile und j-ten Spalte erh�alt.Die Glei hung (17.1) hei�t Entwi klung der Determinante na h der i-tenZeile.In glei her Weise kann man au h eine Entwi klung der Determinante na hder j-ten Spalte dur hf�uhren und erh�alt danndet(A) = nXi=1 aijCij : (17.3)241

242 KAPITEL 17. DETERMINANTENBEMERKUNG: Der Kofaktor ergibt si h aus dem Minor dur h s ha hbrettartigenVorzei henwe hsel, wobei die linke obere E ke einer Matrix den Wert +1 hat.BEMERKUNG: Die Determinante ist nur f�ur quadratis he Matrizen de�niert.BEMERKUNG: Die Lapla e-Entwi klung ist eine rekursive Vors hrift: Die Determi-nante einer n�n-Matrix wird dadur h bere hnet, dass man sie auf Kombinationender Determinanten ihrer (n� 1)� (n� 1)-Untermatrizen zur�u kf�uhrt.Satz:Der Wert der Determinante det(A) h�angt ni ht davon ab, na h wel her Zeileoder na h wel her Spalte die Matrix A entwi kelt wurde. (Ohne Beweis)BEMERKUNG: Wegen der �Aquivalenz aller Reihen- und Spaltenentwi klungen ver-wende man zur Bere hnung von Determinanten gro�er Matrizen am ges hi kte-sten die Zeile beziehungsweise Spalte, in der die meisten Nullen stehen, da somitm�ogli hst viele Terme in (17.1) und (17.3) wegfallen!Die Lapla e-Entwi klung soll nun an elementaren Beispielen demonstriert werden.(1) Die Determinante jeder Einheitsmatrix ist 1,det(En) = 1 f�ur alle n : (17.4)Entwi kelt man n�amli h die Determinante na h der ersten Zeile, erh�alt man det(En) =1 det(En�1). Wiederholt man diesen S hritt nun f�ur die Determinante der Matrixdet(En�1), so gilt det(En�1) = 1 det(En�2). Et .(2) Die Matrix A sei eine 2� 2-Matrix. Dann gilt na h (17.1) und (17.2) mit i = 1:det(A) = a11C11 + a12C12 = a11 � (�1)2M11 + a12 � (�1)3M12.Der MinorM11 ist die Determinante der Matrix, die man dur h Strei hen der erstenZeile und ersten Spalte aus A erh�alt, also gerade das Element a22, und in glei herWeise ist M12 die Matrix, die man dur h Strei hen der ersten Zeile und zweitenSpalte aus A erh�alt, also das Element a21. Wir erhalten also:Notiz (Determinante einer 2� 2-Matrix):Die Determinante einer 2� 2-Matrix A lautetdet(A) = a11a22 � a12a21 : (17.5)(3) Entwi kelt man die Matrix A beispielsweise na h der 2. Spalte, so ergibt (17.3)det(A) = a12C12 + a22C22 = a12 � (�1)3M12 + a22 � (�1)4M22 = �a12a21 + a22a11,womit si h (17.5) best�atigt.(4) Nun sei die Matrix A eine 3�3-Matrix. Wir wollen diese Matrix na h der erstenZeile entwi keln. Na h (17.1) und (17.2) gilt mit i = 1:det(A) = a11C11 + a12C12 + a13C13= a11 � (�1)2M11 + a12 � (�1)3M12 + a13 � (�1)4M13 (17.6)Wir m�ussen also die MinorenM11,M12 undM13 bere hnen.M11 ist na h De�nitiondie Determinante der aus A dur h Strei hen der ersten Zeile und ersten Spalte

243hervorgehenden 2�2-Matrix,M11 = a22a33�a23a32. In glei her Weise erhalten wirM12 = a21a33 � a23a31 und M13 = a21a32 � a22a31. Es folgt:Damit gilt f�ur eine 3� 3-Matrix A:det(A)=a11det0� a22 a23a32 a33 1A� a12det0� a21 a23a31 a33 1A+ a13det0� a21 a22a31 a32 1A=a11(a22a33 � a23a32)�a12(a21a33 � a23a31)+a13(a21a32 � a22a31)=a11a22a33+a12a23a31+a13a21a32�a13a22a31�a11a23a32�a12a21a33(17.7)Notiz (Determinante einer 3� 3-Matrix):Die Determinante einer 3� 3-Matrix A lautetdet(A) = a11a22a33+a12a23a31+a13a21a32�a13a22a31�a11a23a32�a12a21a33Die einzelnen Terme der Determinante kann man si h mit dem folgenden S hemagut merken: � � �a11 a12 a13 a11 a12& &% &% %a21 a22 a23 a21 a22% &% &% &a31 a32 a33 a31 a32 (17.8)Man multipliziert jeweils drei Komponenten in Ri htung der Pfeile, addiert diemit � versehenen Terme und subtrahiert davon die mit versehenen Terme.Wi htiger Hinweis: Diese Regel gilt nur f�ur 3� 3-Matrizen!BEISPIEL:Wel hen Wert hat die Determinante der Matrix 0BBB� 2 3 41 2 10 1 3 1CCCA?Na h der 1. Zeile von (17.7) erhalten wir:det0BBB� 2 3 41 2 10 1 3 1CCCA= 2 det0� 2 11 3 1A�1 det0� 3 41 3 1A+0 det0� 3 42 1 1A= 5Na h (17.8) ergibt si h ebenfalls:det0BBB� 2 3 41 2 10 1 3 1CCCA= 2�2�3+3�1�0+4�1�1�0�2�4�1�1�2�3�1�3= 12+4�2�9 = 5

244 KAPITEL 17. DETERMINANTEN(5) Aus (17.7) folgt, dass die Determinante einer Drehmatrix (16.36) bis (16.38)unabh�angig vom Drehwinkel immer Eins ist,det[D1(�)℄ = det[D2(�)℄ = det[D3( )℄ = 1 f�ur alle �; �; 2 R : (17.9)BEISPIEL:det[D1(�)℄ = det0BBB� 1 0 00 os(�) � sin(�)0 sin(�) os(�) 1CCCA = os2(�) + sin2(�) = 1(6) Die einer Stre kung um den Faktor � zugeordnete Matrix �E3 hat die Determi-nante �3. F�ur allgemeines n gilt analog:det(�En) = det0BBBBBBBBB�
� 0 0 : : : 00 � 0 : : : 00 0 � : : : 0... ... ... . . . ...0 0 0 : : : �1CCCCCCCCCA = �n :
BEMERKUNG: Ein Volumenelement �x1�x2�x3 des dreidimensionalen Raumsbleibt unter Drehungen konstant, unter glei hm�a�iger Stre kung in allen drei Raum-ri htungen w�a hst es mit dem Faktor �3 an. Es gilt sogar ganz allgemein: Die Deter-minante einer Matrix ist ein Ma� f�ur die Gr�o�enver�anderung eines Volumenelementsunter der von der betre�enden Matrix repr�asentierten geometris hen Operation.BEMERKUNG: F�ur n = 2 (Glei hung 17.5) und n = 3 (Glei hung 17.7) ist dieDeterminante eine Summe von Produkten mit jeweils n Matrixelementen, wobei injedem Produkt sowohl die Zeilen- als au h die Spaltenindizes alle Werte von 1 bis nannehmen. Diese Regel gilt f�ur allgemeine n, so dass man eine Determinante stattdur h die iterative De�nition (17.1) und (17.2) au h explizit alsdet(A) = XP [��:::!℄ ���:::!a1�a2� : : : an! (17.10)de�nieren kann. Dabei bedeutet P [�� : : : !℄ die Menge aller m�ogli hen Permutatio-nen (Vertaus hungen) der Reihenfolge der Indizes �, �, : : :, !. Der Faktor ���:::!ist so de�niert, dass er den Wert 1 oder �1 hat, je na hdem, ob es si h um einegerade Permutation oder eine ungerade Permutation handelt.SELBSTTEST: Veri�zieren Sie Glei hung (17.10) f�ur n = 2, 3 und 4!

17.1. DETERMINANTEN: EIGENSCHAFTEN, RECHENREGELN 24517.1 Determinanten: Eigens haften, Re henregelnDeterminanten weisen einige wi htige Eigens haften auf, die entweder aus (17.1)-(17.3) oder (17.10) abgeleitet werden k�onnen.Satz (Eigens haften von Determinanten):(1) Vers hwindet eine Zeile oder eine Spalte einer Matrix A, so ist det(A) = 0.(2) Sind zwei Zeilen (oder au h zwei Spalten) einer Matrix A glei h oderzueinander proportional, so ist det(A) = 0.(3) Multipliziert man alle Elemente einer Zeile (oder einer Spalte) mit einerKonstanten k, so �andert si h die Determinante ebenfalls um den Faktor k.F�ur eine n� n-Matrix A folgt daraus:det(kA) = kn det(A) : (17.11)(4) Vertaus ht man zwei Zeilen (oder zwei Spalten), so we hselt das Vorzei hender Determinante.(5) Die Determinante einer Matrix �andert si h ni ht, wenn man alle Zeilen mitden Spalten vertaus ht, det(AT ) = det(A) : (17.12)(6) Die Determinante einer Martix �andert si h ni ht, wenn man zu einer Zeile(oder Spalte) das Vielfa he einer anderen Zeile (respektive Spalte) addiert.(7) Die Determinante einer Diagonalmatrix, einer oberen Dreie ksmatrix oderau h einer unteren Dreie ksmatrix ist dur h das Produkt Qnj=1 ajj der Haupt-diagonalelemente gegeben.Beweis von Eigens haft (7):F�ur Diagonalmatrizen folgt der Satz direkt aus (17.10). Do h au h f�ur Dreie ksma-trizen ist das Produkt der Diagonalelemente der einzige ni htvers hwindende Termder Summe (17.10), da alle anderen Terme mindestens einen Faktor Null aufweisen.Alternativ kann man au h so argumentieren: F�uhrt man die Lapla e-Entwi klungeiner oberen Dreie ksmatrixA na h der ersten Spalte dur h, so erh�alt man det(A) =a11C11, da alle anderen Elemente der ersten Spalte Null sind. Nun entwi kelt manden Kofaktor C11 na h seiner ersten Spalte und erh�alt wiederum nur einen Term.Wiederholt man dieses Verfahren, so ergibt si h det(A) =Qnj=1 ajj . Entspre hendentwi kelt man eine untere Dreie ksmatrix na h ihrer ersten Zeile. Diagonalmatrizensind dann als spezielle Dreie ksmatrizen au h s hon erfa�t.Satz (Multiplikationssatz f�ur Determinanten):F�ur zwei n� n-Matrizen A und B giltdet(BA) = det(B) det(A) = det(A) det(B) = det(AB) : (17.13)Obwohl also im allgemeinen BA 6= AB ist, gilt denno h det(BA) = det(AB)!

246 KAPITEL 17. DETERMINANTEN17.2 MatrixinversionDe�nition (Regul�are und singul�are Matrizen):Eine MatrixA hei�t regul�ar,wenn ihre Determinante det(A) von Null vers hie-den ist, sie hei�t singul�ar, wenn die Determinante glei h Null ist:A regul�ar, det(A) 6= 0 A singul�ar, det(A) = 0 (17.14)De�nition (Inverse Matrix einer regul�aren Matrix):Die n�nMatrix A sei regul�ar, det(A) 6= 0. Dann ist die zu ihr inverse MatrixA�1 �uber AA�1 = A�1A = En (17.15)de�niert.BEMERKUNG: Na h (17.13) gilt det(A) det(A�1) = det(AA�1) = det(En) = 1.Da det(En) = 1 kann die inverse Matrix daher nur f�ur regul�are Matrizen de�niertwerden.Satz (Bere hnung der inversen Matrix):Die KoeÆzienten der zu einer regul�aren Matrix A inversen Matrix A�1 lauten(A�1)ij = Cjidet(A) : (17.16)Dabei sind die Cji die Kofaktoren der Matrix A.Wi htiger Hinweis: Bea hten Sie die Vertaus hung der Indizes i und j!Kompakt kann (17.16) au h wie folgt ges hrieben werden:A�1 = CTdet(A) (17.17)wobei die Matrix C die Matrix der Kofaktoren ist.Beweis von Satz (17.16):Es ist zu zeigen, dass die Matrix A�1A die Einheitsmatrix ist. Na h De�nition derMatrixmultiplikation (16.44) und (17.16) gilt(A�1A)ij = nXk=1(A�1)ikakj = 1det(A) nXk=1 Ckiakj : (17.18)Wir betra hten nun die F�alle i = j und i 6= j getrennt.i = j: Hier gilt na h (17.1) Pnk=1 Ckiaki = det(A). Damit sind alle Diagonalele-mente von (A�1A) wie gew�uns ht glei h Eins.i 6= j: Die SummePnk=1 Ckiakj muss vers hwinden, da sie die Lapla e-Entwi klungeiner Matrix darstellt, deren i-te und j-te Spalte glei h sind. Damit sind alle Ni ht-diagonalelemente von (A�1A) wie gew�uns ht glei h Null. 2

17.3. CRAMERSCHE REGEL 247BEISPIEL:Die Matrix A sei A = 0� 1 23 4 1A : (17.19)Dann ist die Matrix C der Kofaktoren dur hC = 0� 4 �3�2 1 1A (17.20)gegeben und det(A) = �2. Daraus bere hnet si h A�1 na h (17.16) zuA�1 = �12 0� 4 �2�3 1 1A = 0� �2 13=2 �1=2 1A : (17.21)Zur Probe bere hnen wir das Produkt A�1A und erhaltenAA�1 = 0� 1 23 4 1A0� �2 13=2 �1=2 1A = 0� 1 00 1 1A : (17.22)17.3 Cramers he RegelMit den nun verf�ugbaren Methoden kann die L�osung eines Glei hungssystems mitn Glei hungen und n Unbekannten wie (16.20)A~x = ~bdirekt angegeben werden. Ai bezei hne die Matrix, die man erh�alt, wenn man diei-te Spalte der Matrix A dur h den Spaltenvektor ~b ersetzt:
Ai = 0BBBBBBBBB�a11 : : : a1;i�1 b1 a1;i+1 : : : a1;na21 : : : a2;i�1 b2 a2;i+1 : : : a2;n... ... ... ... ... ...an�1;1 : : : an�1;i�1 bn�1 an�1;i+1 : : : an�1;nan1 : : : an;i�1 bn an;i+1 : : : an;n
1CCCCCCCCCA (17.23)

248 KAPITEL 17. DETERMINANTENSatz (Cramers he Regel):Es sei ~b 2 Cn und A eine n� n-Matrix. Die L�osung ~x 2 Cn des Glei hungssy-stems A~x = ~b (17.24)lautet:Fall I [det(A) 6= 0℄: Die L�osung ist ein Punkt x = (x1; x2; : : : ; xn) in Cn mitden Komponenten xi = det(Ai)det(A) : (17.25)Wenn (17.24) ein homogenes Glei hungssystem ist (alle bi = 0) gilt ~x = ~0.Fall II [det(A) = 0℄: Hier sind zwei F�alle zu unters heiden:(IIa) Mindestens eine der Determinanten det(Ai) vers hwindet ni ht: Die Glei- hungen des Systems sind widerspr�u hli h und erlauben keine L�osung.(IIb) Alle Determinanten det(Ai) vers hwinden: Die L�osungsmenge ist eine un-endli he Punktmenge (eine Gerade oder Ebene beziehungsweise Hyperebene).Beweis von Fall IDa hier det(A) 6= 0 ist, existiert die Inverse Matrix A�1, so dass (17.24) na h ~xaufgel�ost werden kann, ~x = A�1~b. F�ur jede Komponente des Vektors ~x gilt also: xi =Pnj=1A�1ij bj . Verwendet man nun die in (17.16) angegebene Beziehung (A�1)ij =Cjidet(A) , so folgt: xi = Pnj=1 Cjibjdet(A) = det(Ai)det(A) 2BEMERKUNG: Verglei hen Sie (17.25) mit der in Kapitel 15.2 angegebenen L�osung(15.17) f�ur ein System mit zwei linearen Glei hungen.BEISPIEL:Wir betra hten wieder das Beispiel aus Kapitel 15.2. Um die Bere hnung derDeterminanten zu erlei htern und einfa her handhabbare Zahlen zu erhal-ten, multiplizieren wir alle Glei hungen mit dem Faktor 10. Damit vertau-sendfa hen si h zwar alle Determinanten, da jedo h in (17.25) nur Quotien-ten der Determinanten eingehen, �andert si h das Ergebnis ni ht. Wir erhal-ten: det(A) = �40, det(A1 = �40, det(A2 = �24 und det(A)3 = �32und damit wie in Kapitel 15.2: x1 = 1:0, x2 = 0:6 und x3 = 0:8.Zusammenhang von Gau�s hem Verfahren und Cramers her RegelBei den einzelnen S hritten des Gau�s hen Verfahrens �andert si h die Determinantedet(A) der KoeÆzientenmatrix ni ht. Damit gilt f�ur die am S hlu� des Verfahrenserzielte obere Dreie ksmatrix ~A: det(A) = det( ~A) = Qnj=1 ~ajj . Vers hwindet alsokeines der Diagonalelemente der Matrix ~A, so ist au h det(A) von Null vers hie-den. Damit hat das Glei hungssystem na h der Cramers hen Regel eine eindeutigeL�osung. Das glei he Ergebnis hatten wir bei der Diskussion des Gau�s hen Verfah-ren erhalten.Gilt umgekehrt det(A) = 0, gibt es na h der Cramers hen Regel keine oder un-endli h viele L�osungen. Au h dieses Ergebnis folgt aus dem Gau�s hen Verfahren.Allerdings bietet dieses Verfahren den Vorteil, dass es au h eine Aussage �uber dieNatur der L�osungss har (Gerade, Ebene, Hyperebene) erlaubt. Dies kann bei derCramers hen Regel mit Hilfe weiterer und dur haus wi htiger De�nitionen (Rang

17.4. EIGENWERTPROBLEM 249einer Matrix) au h errei ht werden, soll aber im Rahmen dieser Vorlesung ni htmehr behandelt werden.17.4 EigenwertproblemWie wir in Kapitel 16.2.5 gesehen haben, bes hreibt die Multiplikation eines Vek-tors mit einer quadratis hen Matrix eine Kombination von Drehung, Stre kung undVerzerrung in bestimmten Raumri htungen. Damit stellt si h die f�ur viele Anwen-dungen wi htige Frage, ob es zu einer vorgegebenen Matrix A bestimmte Vektoren~x gibt, die si h bei der Multiplikation zwar in ihrer L�ange �andern, ni ht aber in ihrerRi htung. Derartige Vektoren w�aren also | bis auf eine m�ogli he L�angen�anderung| invariant unter der Matrixmultiplikation.Existieren sol he Vektoren?Betra hten wir beispielsweise Drehmatrizen: Hier bleiben bei einer Drehung um einefeste Rauma hse alle Vektoren, die auf dieser A hse liegen unver�andert. Diese sindalso Vektoren mit den gesu hten Eigens haften! Bei Stre kungen bleibt dagegensogar die Ri htung jedes Vektors konstant, es �andert si h ja nur seine L�ange { umeinen konstanten Faktor.Do h �ndet man f�ur jede Matrix A immer derartige Vektoren?Mathematis h formuliert bedeutet diese Frage, ob zu einer vorgegebenen Matrix Aimmer Vektoren ~x 6= 0 existieren, so dassA~x = �~xgilt. Im Hinbli k auf wi htige Anwendungen soll � 2 C zugelassen sein. Falls jedo h� 2 R, entspri ht � genau einer L�angen�anderung des gesu hten Vektors unter derWirkung von A.Dieses Problem f�uhrt auf folgende De�nition:De�nition (Eigenwert und Eigenvektor):Gegeben sei eine quadratis he Matrix A. � 2 C hei�t Eigenwert der MatrixA, wenn ein vom Nullvektor vers hiedener Vektor ~x 2 Cn, ~x 6= ~0, existiert, sodass die Glei hung A~x = �~x (17.26)erf�ullt ist. ~x hei�t der dem Eigenwert � zugeordnete Eigenvektor.Der Nullvektor ~0 erf�ullt immer (17.26). Dies ist jedo h ein triviales Ergebnis, daswir deshalb ausges hlossen haben. Weiterhin ist Glei hung (17.26) eine homogeneGlei hung. Falls ~x ein Eigenvektor ist, ist damit au h jeder Vektor ~x ein Eigen-vektor. Um diese triviale Mehrdeutigkeit auszur�aumen, werden wir Eigenvektorenimmer so normieren, dass j~xj = 1.Die Frage na h Eigenwerten und Eigenvektoren bezei hnet man au h als das Ei-genwertproblem f�ur Matrizen. Stellt man (17.26) um, so nimmt es die Form(A� �E)~x = ~0 (17.27)

250 KAPITEL 17. DETERMINANTENan. Wir erhalten also ein homogenes Glei hungssystem f�ur ~x. Dieses kann na hder Cramers hen Regel nur dann eine ni ht-triviale L�osung ~x besitzen, wenn dieDeterminante det(A� �E) = 0 (17.28)vers hwindet.Ist A eine n � n-Matrix, so ist die Determinante det(A � �E) ein Polynom n-terOrdnung in �:De�nition (Charakteristis hes Polynom):Das dur h die Glei hung (17.28) de�nierte Polynom n-ter Ordnung in � wird harakteristis hes Polynom der Matrix A genannt.Die aus (17.28) folgende Glei hung f�ur � hei�t S�akularglei hung oder Eigen-wertglei hung.Na hdem das harakteristis he Polynom von der Ordnung n ist, hat die S�akularglei- hung n L�osungen: �1; �2; : : : �n. Diese Aussage ist ein Spezialfall des sogenanntenFundamentalsatzes der Algebra: eine Polynom n-ter Ordnung hat genau n (m�ogli- herweise komplexe) Nullstellen. Diese sind die gesu hten Eigenwerte der MatrixA. (Bei der Anzahl der Nullstellen ist ihre Vielfa hheit zu ber�u ksi htigen. So hatdas Polynom x2 = 0 zwar nur eine Nullstelle, aus der Anwendung der Formel f�urL�osungen quadratis her Glei hungen wird jedo h deutli h, dass es si h dabei `ei-gentli h' um zwei Nullstellen x1=2 = 0 handelt, die zu einer `vers hmolzen' sind.Anderes Beispiel: das Polynom x3 = 0 hat ebenfalls nur eine Nullstelle, diese hatnun die Vielfa hheit drei.Sobald man die Eigenwerte bere hnet hat, kann man zu jedem Eigenwert den da-zugeh�origen Eigenvektor bere hnen. Dazu setzt man den betre�enden Eigenwert indie Matrixglei hung ein und l�ost das homogene Glei hungssystem.BEISPIELE:(1) Man bestimme die Eigenwerte und dazugeh�origen Eigenvektoren derMatrix A = 0� 1 00 2 1A (17.29)Aus der Forderung det(A��E) = 0 folgt (1��)(2��) = 0, also �1 = 1,�2 = 2. Den normierten Eigenvektor zum Eigenwert �1 = 1 erh�alt man aus(17.27), 0� 0 00 1 1A~x = ~0 zu ~x = 0� 10 1A : (17.30)In glei her Weise gilt f�ur den normierten Eigenvektor zum Eigenwert �2 = 20� �1 00 0 1A~x = ~0 und damit ~x = 0� 01 1A : (17.31)(2) Man bestimme die Eigenwerte und dazugeh�origen Eigenvektoren derMatrix A = 0� 0 �11 0 1A (17.32)

17.5. REELLWERTIGE, SYMMETRISCHE MATRIZEN 251Aus der Forderung det(A � �E) = 0 folgt nun �2 + 1 = 0, also �1 = i,�2 = �i. Den normierten Eigenvektor zum Eigenwert �1 = i erh�alt manaus (17.27),0� �i �11 �i 1A ~x = ~0 zu ~x = 0� i=p21=p2 1A = 1p2 0� i1 1A :(17.33)In glei her Weise gilt f�ur den normierten Eigenvektor zum Eigenwert �2 =�i0� i �11 i 1A~x = ~0 und damit ~x = 0� �i=p21=p2 1A = 1p2 0� �i1 1A :(17.34)SELBSTTEST: Zeigen Sie, dass jeder der beiden gefundenen Vektorenwirkli h ein Eigenvektor der Matrix A ist. Multiplizieren Sie dazu den inGlei hung (17.33) gegebenen Vektor ~x mit der Matrix A, ~y = A~x, undverglei hen Sie den Vektor ~y mit ~x. Wiederholen Sie die glei he Re hnungmit dem in Glei hung (17.34) gegebenen Vektor ~x.Bea hten Sie, dass nun Eigenwerte und Eigenvektoren komplexwertig sind| und dies obwohl die Elemente der Matrix A immer no h reelle Zahlensind! Zur Normierung von ~x in (17.33) und (17.34) mu�te deshalb au h dieDe�nition (16.27) der Norm eines komplexwertigen Vektors herangezogenwerden.Weiterhin ist zu bemerken, dass A genau der Drehmatrix D( ) in (16.33)mit = �=2 entspri ht. Selbst die geometris h so ans hauli hen Drehma-trizen k�onnen also komplexe Eigenwerte und Eigenvektoren besitzen!Man kann jedo h zeigen, dass reelle symmetris he Matrizen nur reelle Ei-genwerte haben und dass ihre Eigenvektoren zu vers hiedenen Eigenwertensenkre ht aufeinander stehen (Beweis als �Ubungsaufgabe).17.5 Eigenwerte und Eigenvektoren von reellwer-tigen, symmetris hen MatrizenReellwertige symmetris he Matrizen beliebiger Dimension weisen zwei h�o hst er-staunli he Eigens haften auf:Satz:SeiM eine reellwertige und symmetris he n�n Matrix, das hei�t Mij 2 R undMij =Mji. Dann gilt:(I) Die Eigenwerte von M sind reelle Zahlen.(II) Eigenvektoren zu unters hiedli hen Eigenwerten sind orthogonal.Beweis:Wir betra hten zwei vers hiedene Eigenwerte einer reellwertigen und symmetris henMatrix M, die wir mit � und � bezei hnen. Mindestens einer der beiden Eigenwertemuss dabei von Null vers hieden sein. Diesen Eigenwert nennen wir �.Die zu � und � geh�origen Eigenvektoren seien ~v und ~w. Es gilt alsoM~v = �~v oder : nXj=1 Mijvj = �vi ; (17.35)

252 KAPITEL 17. DETERMINANTENdas hei�t aber au h vi = 1� nXj=1 Mijvj ; (17.36)und M~w = �~w oder : nXj=1 Mijwj = �wi : (17.37)Nun zum Beweis von (I): Wenn Glei hung (17.35) erf�ullt ist und man jeden Term xdur h den zu ihm konjugiert-komplexen Term �x ersetzt, so muss au h gelten:nXj=1 Mij vj = � vi : (17.38)Na h Voraussetzung ist M symmetris h und reellwertig. Damit folgt aus (17.38)nXj=1 Mji vj = � vi : (17.39)Wir verwenden nun (17.36) und (17.39) um zu zeigen, dass � eine reelle Zahl ist.Dazu werten wir das Betragsquadrat von ~v geeignet aus:j~vj2 = nXi=1 vi vi = nXi=1 vi 1� nXj=1 Mijvj = 1� nXi;j=1 vj Mij vi= 1� nXj=1 vj nXi=1 Mij vi = 1� nXj=1 vj � vj = �� j~vj2 :Diese Glei hung kann jedo h nur stimmen, wenn � = �, das hei�t � 2 R. 2Nun zum Beweis von (II): Wir betra hten den Ausdru kPni;j=1 vi Mijwj . Einerseitsgilt mit (17.37),nXi;j=1 vi Mijwj = nXi=1 vi�wi = � nXi=1 viwi = � < ~v; ~w > ; (17.40)andererseits wegen der Symmetrie von M und der Reellwertigkeit von M und �nXi;j=1 vi Mijwj = nXi;j=1wjMjivi = nXj=1 wj�vj = � < ~v; ~w > : (17.41)Also gilt � < ~v; ~w >= � < ~v; ~w >. F�ur � 6= � folgt daraus < ~v; ~w >= 0. 2Mitunter ist eine sol he Art der expliziten Beweisf�uhrung wegen der vielen Indizesetwas un�ubersi htli h, daher kann es vorteilhaft sein, si h der Matrixnotation zubedienen. Damit kann der Beweis alternativ folgenderma�en gef�uhrt werden:Beweis des Satzes in Matrixnotation:In Matrixnotation ist das Skalarprodukt dur h < ~x; ~y >= ~xT � ~y de�niert. Manbea hte die komplexe Konjugation des Vektors ~x . Daher gilt wegen (M~x)T = ~xTMTau h <M~x; ~y >= (M~x)T ~y = ~xT MT ~y =< ~x;MT ~y > :Die letzte Glei hheit gilt wegen der Assoziativit�at der Matrixmultiplikation und weilM reell ist. Wenn nun M au h no h symmetris h ist, gilt daher<M~x; ~y >=< ~x;M~y > falls M =MT 2 Rn�n : (17.42)Nun zum Beweis von (I): Sei M~v = �~v . Dann ist einerseits< ~v;M~v >=< ~v; �~v >= � < ~v;~v >= �j~vj2und andererseits <M~v;~v >=< �~v;~v >= � < ~v;~v >= �j~vj2 :Na h (17.42) gilt aber f�ur reelle symmetris he Matrizen< ~v;M~v >=<M~v;~v >

17.6. AUFGABEN 253und daher �j~vj2 = �j~vj2 () � = � () � 2 R ;weil j~vj 6= 0, da ~v na h Voraussetzung Eigenvektor von M ist. 2Nun zum Beweis von (II): Sei weiter M~w = �~w mit � 6= � . Dann ist wegen (I)<M~v; ~w >=< �~v; ~w >= � < ~v; ~w >und < ~v;M~w >=< ~v; �~w >= � < ~v; ~w > :Erneut gilt wegen (17.42)<M~v; ~w >=< ~v;M~w > () � < ~v; ~w >= � < ~v; ~w > () (���) < ~v; ~w >= 0 :Weil aber na h Voraussetzung � � � 6= 0 folgt < ~v; ~w >= 0 . 2Damit ist gezeigt, dass die Eigenvektoren einer reellwertigen, symmetris hen Ma-trix orthogonal zueinander stehen, zumindest wenn si h die Eigenwerte voneinanderunters heiden. Falls ein Eigenwert mehrfa h auftau hen sollte, so kann weiterhingezeigt werden, dass die zu diesem Eigenwert geh�origen Eigenvektoren ebenfallsorthogonal zueinander gew�ahlt werden k�onnen, so dass insgesamt alle Eigenvek-toren orthogonal zueinander sind. Damit kann jeder beliebige Vektor als einfa heLinearkombination der Eigenvektoren ges hrieben werden. F�ur den Fall zweier or-thogonaler Vektoren gilt insbesondere:Satz:Seien ~v; ~w 2 R2 zwei beliebige Vektoren mit j~vj = j~wj = 1 und < ~v; ~w >= 0.Dann kann jeder Vektor ~z 2 R2 wie folgt als Linearkombination von ~v und ~wdargestellt werden: ~z = �~v + � ~w (17.43)mit � =< ~z;~v > und � =< ~z; ~w > : (17.44)Beweisidee:Aus dem Ansatz ~z = �~v + � ~w folgt:< ~z;~v >=< (�~v + � ~w); ~v >= � < ~v;~v > +� < ~w;~v >= � � 1 + � � 0 = �;< ~z; ~w >=< (�~v + � ~w); ~w >= � < ~v; ~w > +� < ~w; ~w >= � � 0 + � � 1 = �. 2Im n�a hsten Kapitel werden wir sehen, wie Eigenwerte und Eigenvektoren f�ur dieDiskussion von Funktionen mehrerer Variabler eingesetzt werden k�onnen.17.6 Aufgaben1. (Determinanten) Gegeben seien die MatrizenA = 0� 2 31 �2 1A,B = 0� 1 33 �7 1A ,C = 0� 2 �1 03 1 1 1A und D = 0BBB� 4 1�2 21 3 1CCCA .Bere hnen sie (falls de�niert) die Determinaten der Matrizen A, B, C, D, AT , B4 ,AB, CTD, CD, (DC)2.

254 KAPITEL 17. DETERMINANTEN2. (Determinanten) MatrixinversionF�ur regul�are Matrizen A existiert eine inverse Matrix A�1 und eine M�ogli hkeit,diese zu bere hnen, kennen sie aus der Vorlesung:A�1 = 1det(A) [C(A)℄T ; d:h: (A�1)ij = [C(A)℄jidet(A) : (17.45)Dabei bezei hnet C(A) die Matrix der Kofaktoren vonA . F�ur deren Komponentengilt [C(A)℄ij = (�1)i+j [M(A)℄ij mit den Minoren [M(A)℄ij von A. Der Minor[M(A)ij ℄ bezei hnet die Determinate derjenigen Untermatrix vonA , die man dur hStrei hen der i{ten Zeile und j{ten Spalte aus A erh�alt.(a) Bere hnen sie mit Hilfe der Regel (17.45) die inversen Matrizen von A =0� 2 34 1 1A , B = 0� a b d 1A und D = 0BBB� 1 0 20 1 00 �1 3 1CCCA . Bere hnen sie zur Pro-be AA�1 , B�1B und DD�1 .(b) L�osen sie A~x = ~p und D~x = ~q f�ur ~p = 0� 14 1A und ~q = 0BBB� 321 1CCCA .3. (Cramers he Regel)(a) Bestimmen sie den S hnittpunkt der beiden Geraden g1 : �x1 + 2x2 = 2 undg2 : x1 + 2x2 = 6 von Aufgabe 1 des 3. �Ubungsblattes mit der Cramers hen Regel.(b) L�osen sie das lineare Glei hungssystem3y + 2x = z + 13x+ 2z = 8� 5y�1 + 3z = x� 2ymit Hilfe der Cramers hen Regel.4. (Eigenwertproblem) EigensystemeGegeben seien die Matrizen A = 0� 1 23 2 1A und B = 0BBB� 0 �4=3 �4=30 2 00 �4 �2 1CCCA .(a) Bere hnen sie Eigenwerte und Eigenvektoren der Matrizen A und B (Normie-rung ni ht vergessen).(b) Bere hnen sie f�ur alle Eigenvektoren ~v� vonA undB das ProduktA~v� bzw.B~v� .5. (Determinanten) �Ahnli hkeitstransformationenBere hnen sie die Matrizen ~A = P�1AP und ~B = Q�1BQ mit P = 0� 2 13 �1 1A

17.6. AUFGABEN 255und Q = 0BBB� 1 0 20 1 00 �1 3 1CCCA f�ur die Matizen A und B aus Aufgabe 4.F�allt Ihnen etwas auf?Bemerkung: Zwei Matrizen A und ~A hei�en �ahnli h, falls eine Matrix P existiert,mit der man ~A aus A via ~A = P�1AP bere hnen kann. Ans hauli h bedeutet die-se Transformation einen Basiswe hsel und sie wird als �Ahnli hkeitstransformationbezei hnet. Damit sind A und ~A Darstellungen derselben linearen Abbildung { nurbez�ugli h vers hiedener Basen.6. (Eigenwertproblem)Eigenwerte und Eigenvektoren reeller symmetris herMatrizenBeweisen sie, dass reelle symmetris he Matrizen nur reelle Eigenwerte haben k�onnenund dass ihre Eigenvektoren zu vers hiedenen Eigenwerten orthogonal zueinandersind.

256 KAPITEL 17. DETERMINANTEN

Kapitel 18Funktionen mehrererVariabler18.1 Einf�uhrungFunktionen stellen Beziehungen zwis hen Variablen dar, zum Beispiel physikali-s hen oder hemis hen Messgr�o�en. Im einfa hsten Fall handelt es si h dabei umdie Beziehung einer abh�angigen Variablen von einer unabh�angigen Variablen. Oftwird eine Messgr�o�e jedo h von mehreren unabh�angigen Variablen bestimmt, wiedie na hfolgenden Beispiele verdeutli hen:18.1.1 Beispiele f�ur Funktionen mehrerer Variabler(I) Das Volumen V eines Quaders mit den Seitenl�angen x, y und z istV (x; y; z) = x � y � z : (18.1)Das Volumen ist also eine Funktion der drei unabh�angigen Variablen x, y und z:V : R�R�R! R ; (x; y; z) 7! V (x; y; z) = x � y � z : (18.2)(II) Die Punkte (x; y; z) der Ober �a he einer Kugel mit Radius R, deren Mittelpunktam Ort (0; 0; 0) liegt, sind dur hx2 + y2 + z2 = R2 (18.3)gegeben. Betra htet man die obere H�alfte der Kugel (z � 0), so kann man dieGlei hung na h z au �osen und erh�altz = +pR2 � x2 � y2 (18.4)wobei die Bedingung x2 + y2 � R2 erf�ullt sein muss, damit z reell ist. Die z-Komponente ist also eine Funktion von x und y. Im Gegensatz zu den Variablen xund y ist R eine f�ur jede Kugel feste Gr�o�e oder Parameter.(III) Eine lineare Glei hung wiea11x1 + a12x2 + : : :+ a1nxn = b1 (18.5)257

258 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERkann als eine Glei hung f�ur x1 in Abh�angigkeit von x2 : : : xnx1 = 1a11 (b1 � a12x2 � : : :� a1nxn) (18.6)aufgefasst werden. Damit kann x1 als Funktion der n�1 anderen Variablen x2; : : : ; xninterpretiert werden: x1 = f(x2; : : : ; xn).(IV) Der Abstand eines Punktes ~x 2 Rn vom Ursprung ist dur h die euklidis heNorm des Vektors ~x gegeben,j~xj = (< ~x; ~x >)1=2 =vuut nXj=1 x2j ; (18.7)h�angt also (ni htlinear) von den n unabh�angigen Variablen xj ab.(V) Von besonderer Bedeutung f�ur die Biologie sind r�aumli he Systeme { vonder Einzelzelle bis zu gro�r�aumigen �Okosystemen. Bei der Modellierung betra htetman dann oft dynamis he Variablen, die Funktionen des Ortes ~r = (x; y; z) und derZeit t sind, beispielsweise die raumzeitli he Konzentrationsverteilung �(x; y; z; t) vonCal iumionen innerhalb einer Nervenzelle. In vielen F�allen verna hl�assigt man diez-Komponente, wie zum Beispiel bei der Modellierung von Populationsdynamiken,bei denen die Di hte � einer Spezies oft nur als Funktion des Ortes in der xy-Ebeneund der Zeit t betra htet wird, d.h. � = �(x; y; t).Im Beispiel (V) ist die dynamis he Variable ein orts- und zeitabh�angiger Skalar�(~r; t). Genauso sind aber au h vektorielle Variablen denkbar. So ergibt si h beimAbbau von r�aumli hen Konzentrationsunters hieden ein Teil hen u�, das hei�t einortsabh�angigerVektor ~�(~r). Da die dynamis hen Gr�o�en in beiden F�allen vom Ortabh�angen, spri ht man in Anlehnung an die Physik (elektris hes und magnetis hesFeld, Gravitationsfeld et .) au h von einem skalaren Feld beziehungsweise einemVektorfeld.Beide Arten feldartiger Gr�o�en sind Ihnen s hon seit langem von der Wetterkarteher gel�au�g: Der Luftdru k ist ein skalares Feld, das aus Luftdru kunters hiedenresultierende Windfeld (Wirbel!) ist ein Vektorfeld.De�nition (Funktionen mehrerer Variabler):Eine Funktion f : Rn ! R mit ~x 7! z = f(x1; : : : ; xn) hei�t skalare Funktionder Variablen x1; : : : ; xn, oder au h skalares Feld.Eine Funktion f : Rn ! Rm mit ~x 7! ~z = (f1(x1; : : : ; xn); : : : ; fm(x1; : : : ; xn))hei�t vektorwertige Funktion der Variablen x1; : : : ; xn, oder au h Vektor-feld.18.1.2 Visualisierung von Funktionen mehrerer VariablerWir k�onnen uns drei Raumdimensionen vorstellen und zwei davon bequem skizzie-ren. Um denno h Funktionen mehrerer Variablen darstellen zu k�onnen, verwendetman unters hiedli he Projektionsmethoden:(I) Perspektivis he Darstellung einer Funktion f(x; y) von zwei unabh�angigenVariablen. Gut geeignet, wenn f in beiden Variablen monoton ist | siehe au h

18.1. EINF�UHRUNG 259Abbildung 18.1. Problematis h, wenn dies ni ht zutri�t, da dann perspektivis he�Ubers hneidungen auftreten | siehe au h Abbildung 18.2.(II) Darstellung zweidimensionaler S hnitte dur h die Funktion. W�ahlt man imFall einer Funktion f(x; y) von zwei Variablen x und y als S hnittebene eine zurx{y{Ebene parallele Ebene im Abstand , so nennt man die S hnittmenge vonS hnittebene und Funktion eine Niveau �a he Nf ( ),Nf ( ) = f~x 2 Rn j f(~x) = g : (18.8)In einer Topographis hen Karte entspri ht eine Niveau �a he einer H�ohenlinie.BEISPIEL :Die Niveau �a hen der Funktion f(x1; x2) = x21 + x22 sind f�ur � 0 Kreiseum den Nullpunkt (0; 0) mit dem Radius p . F�ur < 0 hat die Glei hungx21 + x22 = keine L�osung im R2. Damit existieren f�ur diese Werte au hkeine Niveau �a hen.(III) \F�arbt" man einzelne Niveau �a hen entspre hend ihrem Wert an, so erh�altman eine Farb odierung der Funktion f(x; y). Eine Variable wird dann dur h dieFarbe (in einfa heren Darstellungen au h dur h den Grauwert) visualisiert, die an-deren beiden ganz normal in der Ebene. Diese Darstellung ist sehr vorteilhaft, daabgesehen von einer Limitierung dur h die endli he Farbau �osung keinerlei Infor-mation verlorengeht.
−5
0
5
−5
0
50
10
20
30
40
50
xy
f(x,
y)
Abbildung 18.1: Perspektive Darstellung und H�ohenlinien der Funktion z =f(x; y) = x2 + y2. Die Funktion hat ein Minimum an der Stelle x0 = y0 = 0.18.1.3 DynamikHier betra htet man einerseits Systeme gekoppelter Di�erentialglei hungen,wie zum Beispiel Systeme mit einer Beutepopulation x und R�auberpopulation y,

260 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLER
−5
0
5
−5
0
5−30
−20
−10
0
10
20
30
xy
g(x,
y)
Abbildung 18.2: Perspektive Darstellung und H�ohenlinien der Funktion z =g(x; y) = y2 � x2. Die Funktion hat einen Sattelpunkt an der Stelle x0 = 0, y0 = 0.deren Entwi klung als Funktion der Zeit t dur h dxdt = f(x; y) und dydt = g(x; y) gege-ben ist. Von besonderem Interesse sind dabei Fragen zur Existenz von station�arenL�osungen, periodis hen L�osungen oder Chaos und zur asymptotis hen Stabilit�atbiologis h relevanter L�osungen (Kann si h die untersu hte Population trotz Para-siten, R�aubern, Alterungsprozessen ... halten?). Als einzige unabh�angige Variabletritt bei dieser Art der Modellierung die Zeit t auf.Dagegen erfordert eine realistis he Bes hreibung dynamis her Prozesse oft die Mo-dellierung r�aumli h ausgedehnter Systeme, in denen die dynamis hen Varia-blen von Zeit t und Ort ~r abh�angen. Wi htige Beispiele sind Wellen- und Dif-fusionsph�anomene in Physik, Chemie, Biologie und Te hnik, wobei in biologis henSystemen oft ni ht nur passive Di�usionsprozesse ablaufen, sondern au h aktiveTransportprozesse wie der Sto�transport in einzelnen Zellen oder die elektro he-mis he Reizleitung in Nervensystemen. Derartige Ph�anomene beruhen auf ni ht-linearen Prozessen, die au h f�ur die Musterbildung in der Entwi klungsbiologievon gro�er Bedeutung sind.18.1.4 Wi htige Teilmengen des RnIn glei her Weise, in der man Intervalle im Raum der reellen Zahlen einf�uhrt, kannman mehrdimensionale Intervalle dadur h de�nieren, dass man beispielsweise jedeKomponente xi eines Vektors ~x 2 Rn auf ein eindimensionales Intervall bes hr�ankt.In zwei Dimensionen erh�alt man damit Re hte ke mit zu den Koordinatena hsenparallelen Grenzen, in drei Dimensionen entspre hende Quader, und so weiter ...Beim Studium von Funktionen mehrerer Variabler ist man oft am Verhalten in derN�ahe eines vorgegebenen Punktes ~a = (a1; a2; : : : ; an) interessiert. Dazu betra htetman gerne eine sogenannte "-Umgebung U"(~a) von ~a, das hei�t alle Punkte des

18.2. FOLGEN, GRENZWERT UND STETIGKEIT 261
−2
−1
0
1
2
−2
−1
0
1
20
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
xy
h(x,
y)
Abbildung 18.3: Perspektive Darstellung und H�ohenlinien der Funktion z =h(x; y) = r exp(�r) mit r =px2 + y2. Die Funktion hat an der Stelle x0 = y0 = 0ein Minimum, sie ist an dieser Stelle allerdings ni ht di�erenzierbar! Weiterhin zeigtf eine Linie von Maxima f�ur x2 + y2 = 1, d.h. auf einem Kreis mit Radius 1.Rn, deren (euklidis her) Abstand von ~a kleiner als " ist,U"(~a) = f~x 2 Rn j j~x� ~aj < "g : (18.9)Die "-Umgebung verallgemeinert also das Konzept eines um den gegebenen Punkta 2 R herum symmetris hen Intervalls (f�ur R) bzw. eines Kreises oder einer Kugelmit Mittelpunkt ~a (f�ur R2 respektive R3) auf Rn mit n > 3.18.1.5 S hlussbemerkungWesentli he Eigens haften von Funktionen mehrerer Variabler werden s hon f�urFunktionen von zwei unabh�angigen Variablen x und y si htbar, die wir au h alsVektor ~r = (x; y) zusammenfassen werden,f : R�R! R; (x; y) 7! z = f(x; y) oder au h ~r 7! z = f(~r) : (18.10)Wir werden deshalb im Folgenden vor allem derartige Funktionen betra hten. Fa�tman zudem x und y als r�aumli h Koordinaten auf, so kann man si h f als Bes hrei-bung einer (im allgemeinen gekr�ummten) Fl�a he im dreidimensionalen Raum ein-fa h verans hauli hen. Das Beispiel der Kugelober �a he wurde in Abs hnitt 18.1.1unter (II) s hon bespro hen.18.2 Folgen, Grenzwert und StetigkeitGrenzwert und Stetigkeit von Funktionen einer Variablen sind in Kapitel 8 mit Hilfedes Konzeptes der \Folge" eingef�uhrt worden: Eine Funktion f(x) hat dann einen

262 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERGrenzwert z an der Stelle a, wenn f�ur jede reellwertige Folge (xk)k2N mit xk 6= af�ur alle k und limk!1 xk = a die Bedingung limk!1 f(xk) = z erf�ullt ist (sieheKapitel 8.1). Man s hreibt dann au h limx!a f(x) = z. Die Funktion ist stetig,wenn zus�atzli h limx!a f(x) = f(a) (siehe Kapitel 8.2).Wir wollen diese Konzepte nun auf Funktionen f(x1; x2; : : : ; xn) mehrerer Varia-ble x1; x2; : : : ; xn �ubertragen. Dies ges hieht am einfa hsten dadur h, dass wir dieAbh�angigkeit der Funktion f vom Vektor ~x = (x1; x2; : : : ; xn) komponentenweisebetra hten.Dazu de�nieren wir in einem ersten S hritt den Begri� einer vektorwertigen Fol-ge:De�nition (Vektorwertige Folge):Eine vektorwertige Folge (~xk)k2N ist eine Folge von Vektoren ~xk =(x1;k; x2;k; : : : ; xn;k) 2 Rn.BEMERKUNG: Bea hten Sie die unters hiedli he Bedeutung der runden Klammernin den beiden vorangegangenen Ausdr�u ken: In (~xk)k2N bezei hnen die Klammerneine Folge mit vektoriellen Gliedern ~xk, in (x1;k; x2;k; : : : ; xn;k) die komponentenar-tige Darstellung des k-ten Vektors ~xk selbst! Die �Ahnli hkeit beider Notationen magverwirrend sein, sie ers heinen aber nur in diesem Unterkapitel gemeinsam.Betra htet man die vektorwertige Folge (~xk)k2N komponentenweise, so kann mansie au h als geordnete Menge von n Folgen (xi;k)k2N der Komponenten xi;k derVektoren ~xk interpretieren.Die Folge (~xk)k2N konvergiert genau dann, wenn ein Vektor ~a existiert, so dass die i-te Folge, das hei�t (xi;k)k2N, gegen die i-te Komponente ai des Vektors konvergiert.Mit dieser Zur�u kf�uhrung einer vektorwertigen Folge auf n reellwertige Folgen kannman den Grenzwert und die Stetigkeit einer Funktion f(x1; x2; : : : ; xn) lei ht de�-nieren:De�nition (Grenzwert und Stetigkeit):Eine Funktion f(x1; x2; : : : ; xn) hat dann einen Grenzwert z an der Stelle~a = (a1; a2; : : : ; an), wenn f�ur jede vektorwertige Folge (~xk)k2N mit ~xk 6= ~a f�uralle k und limk!1 ~xk = ~a die Bedingung limk!1 f(~xk) = z erf�ullt ist.Man s hreibt daf�ur au h lim~x!~a f(~x) = z.Die Funktion ist stetig, wenn zus�atzli h lim~x!~a f(x) = f(~a) gilt.BEISPIEL:Wie im eindimensionalen Fall muss der Grenzwert limk!1 f(~xk) = z f�uralle Folgen mit limk!1 ~xk = ~a und ~xk 6= ~a glei h sein. Ein Gegenbeispielm�oge dies verdeutli hen: Die Funktion f(x1; x2),f(x1; x2) =8>>><>>>: x1x2x21 + x22 ; (x1; x2) 6= (0; 0) 2 R ; (x1; x2) = (0; 0)hat unabh�angig von der Wahl von keinen Grenzwert an der Stelle (0; 0).

18.3. PARTIELLE ABLEITUNGEN 263Beweis: Man betra hte die Folge (~xk) mit x1;k = k�1 und x2;k = �k�1wobei � 2 R ein fest gew�ahlter Parameter sei. Unabh�angig vom Wert von� konvergiert diese Folge gegen den Punkt (0; 0). Weiterhin giltf(x1;k; x2;k) = k�1 � �k�1k�1 � k�1 + �k�1 � �k�1 = �1 + �2 :Daraus folgt: limk!1 f(x1;k; x2;k) = �=(1 + �). Der Grenzwert der Folge(f(~xk)) h�angt also von � ab. Damit hat die Funktion f(x1; x2) keinenGrenzwert an der Stelle (0; 0) und ist deshalb an dieser Stelle au h ni htstetig.BEMERKUNG: Dieses Beispiel verallgemeinert in gewisser Weise das Beispiel derSignum-Funktion (f(x) = x=jxj f�ur x 6= 0) in Kapitel 5.2. Diskutieren Sie dieGemeinsamkeiten und Unters hiede zwis hen beiden Beispielen!18.3 Partielle AbleitungenUm eine dur h (18.10) bes hriebene Fl�a he zu untersu hen, k�onnen wir ihre S hnitt-kurve mit einer vorgegebenen Ebene betra hten, beispielsweise der zur y{z{Ebeneparallelen Ebene x = x0, z = f(x0; y) : (18.11)F�ur festes x = x0 h�angt f also nur no h von y ab, und wir k�onnen die Ableitungvon f na h y wie gewohnt bere hnen,dzdy = df(x0; y)dy : (18.12)BEMERKUNG: Die Ableitung wird im Allgemeinen vom Wert von x0 abh�angen!BEISPIEL :Wie gro� ist der Anstieg der Ober �a he einer Halbkugel z =pR2 � x2 � y2{ siehe au h Glei hung (18.4) { wenn man x = x0 festh�alt und y variert?Di�erenziert man z bei festem x = x0, so erh�alt mandzdy = ddyqR2 � x20 � y2 = �ypR2 � x20 � y2 : (18.13)Dabei muss vorausgesetzt werden, dass jx0j < R und jyj <pR2 � x20 ist,damit z reellwertig und na h y di�erenzierbar ist.Der Anstieg ist also f�ur negatives y positiv, f�ur positives y negativ, undvers hwindet f�ur y = 0. Glei hzeitig h�angt der Anstieg au h vom gew�ahltenx-Wert x0 ab. Ma hen Sie si h dies au h mit Hilfe von Abbildung 18.4deutli h!Betra htet man die S hnittkurve der Funktion f mit der Ebene y = y0, sokann man entspre hend zu (18.12) au h die Ableitungdzdx = df(x; y0)dx (18.14)de�nieren.In beiden F�allen untersu ht man also das Verhalten einer Funktion mehrererVariabler dadur h, dass man alle Variablen bis auf eine festh�alt und damitnur eine teilweise oder partielle Ableitung bildet.

264 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERWill man deutli h ausdr�u ken, wel he Variable bei der betre�enden partiellen Ab-leitung festgehalten wird, so verwendet man folgende S hreibweisen:De�nition (Partielle Ableitung):Sei f : R2 ! R mit (x; y) 7! z = f(x; y) eine skalare Funktion der beidenVariablen x und y. Leitet man f na h x bei festgehaltenem y-Wert y0 ab, sohei�t diese Ableitung die partielle Ableitung von f na h x. Leitet man fna h y bei festgehaltenem x-Wert x0 ab, so hei�t diese Ableitung die partielleAbleitung von f na h y.Diese Ableitungen werden als �f�x und �f�y (18.15)notiert. Will man betonen, dass die partielle Ableitung an einer bestimmtenStelle ~r0 bere hnet werden soll, so s hreibt man daf�ur�f�x ����~r0 beziehungsweise �f�y ����~r0 : (18.16)Entspre hend werden partielle Ableitungen von Funktionen mit drei, vier ... Va-riablen de�niert, wobei au h hier immer nur eine Variable variiert wird, w�ahrenddie restli hen zwei, drei ... Variablen festgehalten werden.BEMERKUNG: In der Literatur �nden si h au h folgende Abk�urzungen:�f�x = �xf = fx (18.17)�f�y = �yf = fy (18.18)(18.19)Partielle Ableitungen wie �xf(x; y) sind wieder Funktionen von x und y. Falls siedi�erenzierbar sind, k�onnen damit partielle Ableitungen h�oherer Ordnung gebildetwerden: ��x ��f�x� = �2f�x2 (18.20)BEMERKUNG: Ein weiterer wi htiger Hinweis zur Notation: �2f�x2 ist ni ht die Ab-leitung von f na h x2! ��y ��f�x� = �2f�y �x (18.21)In (18.21) wird zuerst y festgehalten und f na h x di�erenziert. Ans hlie�end wirddas Ergebnis na h y di�erenziert, wobei nun x festgehalten wird.Dagegen wird in ��x ��f�y� = �2f�x �y (18.22)zuerst x festgehalten und f na h y di�erenziert. Ans hlie�end wird das Ergebnisna h x di�erenziert, wobei nun y festgehalten wird.

18.3. PARTIELLE ABLEITUNGEN 265Es k�onnen au h beliebige h�ohere partielle Ableitungen gebildet werden, in denendie unabh�angigen Variablen x und y entweder nur einzeln auftreten { wie in �3f(x;y)�x3oder �2f(x;y)�y2 { oder au h gemis ht { wie in �2f(x;y)�y �x oder �4f(x;y)�y �x �y2 .BEISPIEL :Die Funktion f(x; y) = sin(xy) exp(by)sei vorgegeben. Ihre partiellen Ableitungen erster und zweiter Ordnung lau-ten: �f�x = y os(xy) exp(by) �2f�x2 = �y2 sin(xy) exp(by)�f�y = x os(xy) exp(by) + b sin(xy) exp(by)�2f�y2 = �x2 sin(xy) exp(by) + 2bx os(xy) exp(by) + b2 sin(xy) exp(by)�2f�y�x = os(xy) exp(by)�xy sin(xy) exp(by)+by os(xy) exp(by) = �2f�x�yIm obigen Beispiel gilt �2f(x;y)�x �y = �2f(x;y)�y �x . Stimmt dies immer? Hier hilft derSatz von S hwarz (ohne Beweis):Besitzt f : R2 ! R stetige partielle Ableitungen �f�x , �f�y und �2f�y �x dann exi-stiert au h �2f�x �y und es gilt �2f�y �x = �2f�x �y .Der Satz gilt in glei her Weise in h�oheren Dimensionen.Bevor man die Reihenfolge einer gemis hten partiellen Ableitung �2f�x �y vertaus ht,untersu he man also die Stetigkeit von �f�x , �f�y und �2f�y �x ! In den meisten F�allenwird man hier keine b�ose �Uberras hung erleben, sobald aber beispielsweise Potenzenmit negativem Exponenten auftau hen, ist Vorsi ht geboten.BEMERKUNG: (F�ur Interessierte) Bei der partiellen Ableitung einer Funktion fna h einer bestimmten Variable (zum Beispiel x) werden im Normalfall die anderenunabh�angigen Variablen (zum Beispiel y) festgehalten. Es kommt jedo h au h vor,dass man eine bestimmte Kombination der anderen Variablen festhalten m�o hte,zum Beispiel den Radius r in der xy-Ebene, r = px2 + y2. Diese partielle Ablei-tung s hreibt man als ��f�x�r, wobei der Index r die festgehaltene Gr�o�e bezei hnet.Die partielle Ableitung von f na h x bei festem y k�onnte damit au h als ��f�x�yges hrieben werden, do h l�a�t man in unzweideutigen F�allen Klammer und Indexeinfa h weg. Wi htig ist jedo h, dass der Wert einer partiellen Ableitung ents hei-dend davon abh�angt, wel he andere Variable festgehalten wurde! Dies zeigt dasn�a hste Beispiel:BEISPIEL :Bei der Bes hreibung der Halbkugel in (18.4) h�atte man au h die Po-larkoordinaten r = px2 + y2 und � = ar tan(y=x) einsetzen k�onnen,

266 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERum beispielsweise y dur h y = x tan(�) zu ersetzen. Damit erhielte manz =pR2 � x2(1� tan2 �) und daraus:��z�x�� = � x(1� tan2 �)pR2 � x2(1� tan2 �) = � x� y2x�1pR2 � x2 � y2 : (18.23)Dieses Ergebnis stimmt ni ht mit (18.13) �uberein! Die Diskrepanz erkl�artsi h daraus, dass nun der Winkel � konstant gehalten wurde, w�ahrend in(18.13) die Koordinate y konstant war. Verans hauli hen Sie si h in derAbbildung 18.4, dass die zwei partiellen Ableitungen eine unters hiedli hegeometris he Bedeutung haben!
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1−1
−0.5
0
0.5
1
← y = y0
x
↓ φ = φ0
y
f(x,
y)
Abbildung 18.4: Kugel mit S hnitt �a hen � = �0 und y = y0No h deutli her wird dieses Ph�anomen, wenn man r =px2 + y2 in (18.4)einsetzt, woraus si h z = pR2 � r2 ergibt. Daraus folgt:��z�x�r = 0 : (18.24)Die partielle Ableitung na h x bei festem r ist also unabh�angig von x undsogar glei h Null. Au h dies ist verst�andli h, bewegt man si h do h nun aufeinem Zylinder mit festem Radius r. Dessen S hnittlinie mit der Halbkugelverl�auft in konstanter H�ohe z = pR2 � r2, so dass die partielle Ableitungna h x vers hwinden muss!18.4 Potenzreihen und Taylorentwi klung im RnMit Hilfe der partiellen Ableitungen kann das Verhalten einer Funktion mehrererVariabler untersu ht werden. Konzeptionell neu gegen�uber dem eindimensionalenFall ist der Umstand, dass si h eine Funktion unters hiedli h bez�ugli h vers hiedener

18.4. POTENZREIHEN UND TAYLORENTWICKLUNG IM RN 267Variablen verhalten kann. Betra htet man beispielsweise die Funktion f(x; y) =x2 � y2 an der Stelle (x0; y0) = (0; 0), so bemerkt man, dass f bez�ugli h x einMinimum, bez�ugli h y jedo h ein Maximum hat (siehe au h Abbildung 18.2).Um die aus Ph�anomenen dieser Art erwa hsenen Komplikationen ras h zu ver-stehen, wird im Folgenden zuerst die Taylorentwi klung einer Funktion mehrererVariabler vorgestellt und ans hlie�end zur Untersu hung lokaler Eigens haften vonFunktionen mehrerer Variabler verwendet. Dabei bes hr�anken wir uns auf den Fallzweier unabh�angiger Variabler, die mit x und y bezei hnet werden.De�nition (Potenzreihen im Rn):Potenzreihen werden im R2 in glei her Weise wie in den reellen Zahlen R de�-niert. Ordnet man die Glieder einer sol hen Reihe g na h aufsteigenden Potenzenin x und y, so erh�alt man alsog(x; y) = 00 0:Ordnung : konstanter Term+ 10x+ 01y 1:Ordnung : lineare Terme+ 20x2 + 11xy + 02y2 2:Ordnung : quadratis he Terme+ 30x3 + 21x2y + 12xy2 + 03y3 3:Ordnung : kubis he Terme+ : : : : : : (18.25)wobei die Indizierung der KoeÆzienten ij derart gew�ahlt wurde, dass i derjeweiligen Potenz von x und j der Potenz von y entspri ht.Wie im eindimensionalen Fall (siehe Kapitel 9.5) erlauben Potenzreihen die Taylor-entwi klung einer Funktion f(x; y) um einen Punkt (x0; y0), wenn diese Funktiongen�ugend oft di�erenzierbar ist. Dazu s hreiben wir f als Potenzreihe in (x � x0)und (y � y0) und erhalten aus (18.25):f(x; y) = 00+ 10(x � x0) + 01(y � y0)+ 20(x � x0)2 + 11(x� x0)(y � y0) + 02(y � y0)2 + : : : (18.26)Die KoeÆzienten ij der Taylorentwi klung ermitteln wir, indem wir die Funktionf und ihre partiellen Ableitungen an der Stelle (x0; y0) auswerten. Zur Verk�urzungder Notation setzen wir~r = 0� xy 1A und ~r0 = 0� x0y0 1A (18.27)und erhalten: f(x0; y0) = 00 (18.28)

268 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERund �f�x ����~r = 10 + 2 20(x� x0) + 11(y � y0) + : : : ! �f�x ����~r0 = 10�f�y ����~r = 01 + 2 02(y � y0) + 11(x � x0) + : : : ! �f�y ����~r0 = 01�2f�x2 ����~r = 2 20 + 6 30(x� x0) + 2 21(y � y0) + : : : ! �2f�x2 ����~r0 = 2 20�2f�x �y ����~r = 11 + 2 21(x� x0) + 2 12(y � y0) + : : : ! �2f�x �y ����~r0 = 11�2f�y2 ����~r = 2 02 + 2 12(x� x0) + 6 03(y � y0) + : : : ! �2f�y2 ����~r0 = 2 02Setzt man diese Terme in (18.26) ein, so erh�alt man die Taylorentwi klungf(x; y) = f(x0; y0)+ �f�x ����~r0� (x�x0)+ �f�y ����~r0� (y�y0)+ 12 ��2f�x2 ����~r0� (x�x0)2+2 �2f�x �y ����~r0� (x�x0)(y�y0)+ �2f�y2 ����~r0� (y�y0)2#+ : : : (18.29)BEMERKUNG: Alle partiellen Ableitungen werden an der Stelle ~r0 = (x0; y0) be-re hnet.Mit Hilfe der Vektor- und Matrixnotation kann dieses Ergebnis au h sehr kom-pakt ges hrieben werden. Dazu fassen wir die beiden partiellen Ableitungen ersterOrdnung formal ebenfalls zu einem Vektor zusammen:De�nition (Gradient):Sei f : Rn ! R eine Funktion mehrerer Variabler. Dann ist der Gradient vonf an der Stelle ~r0 ein n-dimensionaler Vektor, dessen i-te Komponente dur hdie partielle Ableitung von f na h der i-ten Variablen gegeben ist. Der Gradientwird als ~rf ���~r0 ges hrieben, f�ur n = 2 erhalten wir also~rf(~r0) = 0BBBBB� �f�x ����~r0�f�y ����~r0
1CCCCCA : (18.30)Das Symbol ~r selbst hei�t \Nabla-Operator" oder kurz: \`Nabla".

18.5. TOTALES DIFFERENTIAL UND RICHTUNGSABLEITUNG 269De�nition (Hesse-Matrix):Sei f : Rn ! R eine Funktion mehrerer Variabler. Ordnet man die partiellenAbleitungen zweiter Ordnung als Matrix an, so erh�alt man die Hesse-MatrixH(~r0) H(~r0) = 0BBBBB� �2f�x2 ����~r0 �2f�x �y ����~r0�2f�y �x ����~r0 �2f�y2 ����~r01CCCCCA : (18.31)
Mit diesen De�nitionen kann (18.29) zusammengefasst werden zu:Taylorreihe im Rn:f(~r) = f(~r0) + (~r � ~r0)T � ~rf(~r0) + 12(~r � ~r0)T H(~r0) (~r � ~r0) + : : : (18.32)Hierbei bezei hnet \ � " das Skalarprodukt und ~r T den zu ~r transponiertenVektor.18.5 Totales Di�erential und Ri htungsableitungDe�nition (Totales Di�erential):Die Taylorentwi klung (18.32) gibt an, wie si h f(~r) als Funktion des Vektors ~rin der N�ahe der Stelle ~r0 �andert. Der in ~r� ~r0 � d~r = (dx; dy) lineare Teil wirdtotales Di�erential df genannt,df = ~rf � d~r = �f�x dx + �f�y dy; (18.33)und bes hreibt in linearer N�aherung die Ver�anderung von f(~r) bei Variationvon ~r.Unters heidet si h ~r von ~r0 beispielsweise nur in x-Ri htung, so ist dy = 0 und manerh�alt df = �f�xdx, unters heidet er si h nur in y-Ri htung, so ergibt si h df = �f�y dy.In diesen beiden speziellen Ri htungen entspri ht damit df genau der in�nitesimalen�Anderung von f bei Variation der unabh�angigen Variablen.In vielen F�allen m�o hte man jedo h au h die Ableitung der Funktion f in einerbestimmten Ri htung, also l�angs eines vorgegebenen Vektors ~a = (ax; ay) bere h-nen, der gem�a� j~aj = 1 normiert ist. In diesem Fall sind dx und dy proportionalzueinander, so dass man au h dx = ds ax und dy = ds ay s hreiben kann | dieAbleitung soll ja in Ri htung des Vektors ~a erfolgen | und es folgtdf = �f�xax ds+ �f�y ay ds = ~rf � ~a ds : (18.34)

270 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERNa hdem auf der re hten Seite nur mehr ds als einzige in�nitesimale Gr�o�e auf-tau ht, kann man mit ax = dx=ds und ay = dy=ds au hdfds = �f�x dxds + �f�y dyds = ~rf � ~a (18.35)s hreiben.De�nition (Totale Ableitung und Ri htungsableitung):Sei f : Rn ! R eine Funktion mehrerer Variabler. Dann wird df=ds die totaleAbleitung von f na h s genannt.Der Term ~rf �~a hei�t au h Ri htungsableitung von f in Ri htung von ~a.BEMERKUNG: Die Normierung j~aj = 1 ist notwendig, da sonst die totale Ableitungdf=ds ni ht eindeutig bestimmt ist.BEISPIEL :Man bere hne die Ri htungsableitung von f(x; y) = xy + x2 + y2 � 6y inRi htung des auf eins normierten Vektors ~a = 1p5 � (2; 1). F�ur wel he Wertevon x und y vers hwindet diese Ableitung?Die partiellen Ableitung sind�f�x = y + 2x ; �f�y = x+ 2y � 6 ;so dass ~rf(x; y) = 0� y + 2xx+ 2y � 6 1A :Daraus folgt~rf(x; y) � ~a = 1p5(2y + 4x+ x+ 2y � 6) = 1p5(5x+ 4y � 6) :Damit die Ri htungsableitung vers hwindet, muss y also die Glei hungy = 32 � 54xerf�ullen.Aus (18.35) folgt, dass si h f l�angs eines Vektors ~a ni ht �andert, wenn dieser orthogo-nal auf dem Gradienten ~rf steht. Dies bedeutet aber, dass der Gradient orthogonalzu der Menge der Vektoren steht, f�ur die f einen konstanten Wert hat:Satz:Der Gradient ist orthogonal zur Niveau �a he.Weiterhin folgt aus (18.35), dass si h f l�angs eines Vektors ~a maximal �andert, wennder Vektor parallel zu ~rf steht:

18.6. LOKALE EXTREMA IN D = 2 DIMENSIONEN 271Satz:Wenn ~rf 6= 0, so zeigt ~rf in Ri htung des maximalen Zuwa hses von f . Ge-nauer: ~rf(~x) �~a ist maximal, wenn ~a Ri htung und Orientierung des Gradienten~rf hat.Damit hat der Gradient ~rf eine direkte geometris he Bedeutung gewonnen!Als Abs hluss dieses Abs hnittes sei no h darauf hingewiesen, dass die Di�erentia-tionsregeln wie beispielsweise die Produkt-, Quotienten- und Kettenregel weiterhinwie im eindimensionalen Fall gelten:BEISPIEL :Die Variable z h�ange von den zwei Variablen x und y ab, die beide wiederumvon der Variable t abh�angen m�ogen, so dass insgesamt gelte:z(t) = f [x(t); y(t)℄Dann folgt na h der Kettenregeldzdt = �z�x dxdt + �z�y dydtW�ahlt man insbesondere y(t) = t, das hei�t z(t) = f [x(t); t℄, so giltdzdt = �z�x dxdt + �z�t :Da die Funktion z sowohl direkt von t abh�angt als au h indirekt �uber die Va-riable x, ergeben si h zwei Terme bei der Bestimmung der totalen Ableitungvon z na h t. Die totale Ableitung von z na h t teilt si h also auf in einepartielle Ableitung von z na h t und das Produkt der partiellen Ableitung�z=�x mit der Ableitung von x na h t.Auf den ersten Bli k ist dieses Ergebnis si her etwas verwirrend. Es ist aberextrem wi htig, da in vielen Anwendungen sowohl direkt als au h indirektAbh�angigkeiten zwis hen dynamis hen Variablen auftau hen!18.6 Lokale Extrema in D = 2 DimensionenDe�nition (Kritis her oder station�arer Punkt):Vers hwindet der Gradient ~rf an einem Punkt ~r0, so ist f dort in linearer N�ahe-rung konstant. Ein sol her Punkt hei�t kritis her Punkt oder station�arerPunkt.Die Funktion f hat an einem kritis hen Punkt m�ogli herweise ein (lokales) Maxi-mum oder Minimum oder au h einen Sattelpunkt. Wie in einer Dimension h�angtes dann von den (nun: partiellen) Ableitungen zweiter Ordnung ab, ob au h wirk-li h ein Extremwert vorliegt. Wie wir im Folgenden zeigen werden, bestimmt dabeidas Vorzei hen der Determinante D(~r) der Hesse-Matrix H(~r) zusammen mit dem

272 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERVorzei hen der beiden partiellen Ableitungen �2f�x2 und �2f�y2 eindeutig das Verhalten.MitD(~r0) = det0BBBBB� �2f�x2 ����~r0 �2f�x �y ����~r0�2f�y �x ����~r0 �2f�y2 ����~r01CCCCCA = �2f�x2 ����~r0 � �2f�y2 ����~r0 � " �2f�x �y ����~r0#2 :(18.36)gilt n�amli h:Satz (Kr�ummungsverhalten an einem station�aren Punkt):Sei f : R2 ! R eine Funktion zweier Variabler, die an der Stelle ~r0 einen sta-tion�aren Punkt aufweist. Bezei hnet D(~r0) die Determinante der Hesse-Matrixan der Stelle ~r0, so giltD(~r0) > 0 ; �2f�x2 ����~r0 > 0; �2f�y2 ����~r0 > 0 ! lokales Minimum;D(~r0) > 0 ; �2f�x2 ����~r0 < 0; �2f�y2 ����~r0 < 0 ! lokales Maximum;D(~r0) < 0 ; ! Sattelpunkt;D(~r0) = 0 ; ! unbestimmt: (18.37)
BEISPIEL :Man su he die Extremwerte der im vorletzten Re henbeispiel angegebenenFunktion f = xy + x2 + y2 � 6y. Dort wurden die partiellen Ableitungens hon bere hnet. Aus der Bedingung �f�x(x0; y0) = 0 und �f�y (x0; y0) = 0erhalten wir nun die zwei gekoppelten linearen Glei hungeny0 + 2x0 = 0 und x0 + 2y0 � 6 = 0 :Ein m�ogli her Extremalpunkt muss also die Koordinaten x0 = �2 undy0 = 4 haben | und liegt damit auf der im vorletzten Beispiel gefundenenGerade. (Warum muss dies so sein?) Die partiellen Ableitungen zweiterOrdnung lauten allgemein�2f�x2 ����~r0 = 2 > 0 ; �2f�x �y ����~r0 = 1 ; �2f�y2 ����~r0 = 2 > 0 :Damit ist D(�2; 4) = 2 � 2 � (1)2 = 3 > 0. Es handelt si h also um einMinimum.18.6.1 Diskussion des Satzes (18.37)Die Bedingungen (18.37) geben an, wann ein station�arer Punkt ein lokales Maxi-mum, lokales Minimum oder ein Sattelpunkt ist. Wir wollen diese Bedingungen nunherleiten, und dabei glei hzeitig Ergebnisse der Theorie Komplexer Zahlen (Kapi-tel 11) und Linearer Glei hungen (Kapitel 15{17) auf die Analyse von Funktionenmehrerer Variabler anwenden. Zur Vereinfa hung bes hr�anken wir uns dabei wie inden vorangegangenen Abs hnitten auf Funktionen zweier Variabler.

18.6. LOKALE EXTREMA IN D = 2 DIMENSIONEN 273Wann ist ein station�arer Punkt ~r0 ein lokales Maximum der Funktion f(~r)? Genaudann, wenn f�ur alle ~r 6= ~r0 in der Umgebung von ~r0 gilt: f(~r) < f(~r0).SELBSTTEST: Ma hen Sie si h diese Aussage ans hauli h klar!Betra hten wir die Taylorentwi klung (18.32) von f(~r) und setzen ~z = ~r � ~r0, soliegt also dann ein lokales Maximum vor, wenn der quadratis he Term Q(~z)=2 derTaylorentwi klung der Funktion f an der Stelle ~r0 mitQ(~z) = ~z T H ~z (18.38)f�ur alle ~z 6= ~0 negativ ist!BEMERKUNG: Da wir die Stelle ~r0 im Folgenden ni ht ver�andern, haben wir zurVermeidung von Mi�verst�andnissen statt wie bisher H(~r0) einfa h H ges hrieben.BEMERKUNG: Da ~zTH~z < 0 f�ur beliebige ~z 6= ~0 gelten soll, handelt es si h beidieser Bedingung um eine Forderung an die MatrixH. Matrizen, die diese Forderungerf�ullen nennt man au h negativ de�nit (und positiv de�nit, falls ~zTH~z > 0 f�uralle ~z 6= ~0).In glei her Weise ist ~r0 ein lokales Minimum der Funktion f(~r), wenn Q(~z) f�ur alle~z 6= ~0 positiv ist. Ein Sattelpunkt liegt s hlie�li h dann vor, wenn Q(~z) je na hRi hting von ~z positiv oder negativ ist | siehe au h Abbildung 18.2.Wie aber ist beispielsweise garantiert, dass Q(~z) f�ur alle ~z 6= ~0 negativ ist? Wirwerden nun zeigen, dass die Antwort auf diese Frage von den Eigenwerten der ander Stelle ~r = ~r0 ausgewerteten Hesse-Matrix H abh�angt. Um die Diskussion zuvereinfa hen, k�urzen wir H wie folgt ab:H = 0BBBBB� �2f�x2 ����~r0 �2f�x �y ����~r0�2f�y �x ����~r0 �2f�y2 ����~r01CCCCCA = 0� a bb 1A : (18.39)In der zweiten Glei hung wurde die auf der Vertaus hbarkeit der partiellen Ab-leitungen beruhende Symmetrie von H explizit ber�u ksi htigt. In dieser k�urzerenNotation folgt f�ur (18.36) D(~r0) = det(H) = a � b2 : (18.40)Im Folgenden benutzen wir zwei Eigens haften der Eigenwerte und Eigenvektorenvon H, die ganz allgemein f�ur reellwertige, symmetris he Matrizen gelten.Als reellwertige, symmetris he Matrix hat die Hesse-MatrixH na h den Ergebnissenvon Kapitel 17.5 zwei reelle Eigenwerte � und �. Die zugeh�origen orthogonalenEigenvektoren seien ~v und ~w. Jeder Vektor ~z kann damit als ~z = �~v + � ~w, mit� =< ~z;~v > und � =< ~z; ~w > ges hrieben werden.Nun wenden wir uns der Frage zu: Unter wel hen Bedingungen an H ist Q(~z) f�urbeliebige ~z 6= ~0 immer positiv beziehungsweise immer negativ?Q(~z) = ~z T H~z = < ~z;H~z >= < (�~v + � ~w);H(�~v + � ~w) >

274 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLER= < (�~v + � ~w); (�H~v + �H~w) >= < (�~v + � ~w); (��~v + ��~w) > = �2� + �2� : (18.41)Der in ~z quadratis he Term Q(~z) ist also genau dann f�ur beliebige ~z 6= ~0 negativ,wenn die beiden Eigenwerte � und � negativ sind. Der Term ist positiv, wenn beideEigenwerte positiv sind, und �andert sein Vorzei hen je na h Ri htung von ~z, wenneiner der beiden Eigenvektoren positiv, der andere negativ ist. Damit k�onnen wirfesthalten:Falls �; � > 0 liegt an der Stelle ~r0 ein lokales Minimum vor, falls �; � < 0 einlokales Maximum, und falls � � � < 0 hat die Funktion einen Sattelpunkt. Fallseiner der Eigenwerte glei h Null ist, so vers hwindet Q(~z) l�angs des betre�endenEigenvektors | siehe au h das Beispiel von Abbildung 18.3.Als letztes bleibt no h die Frage: Wie h�angen � und � von den drei Parametern a,b und der Hesse-Matrix H(~r0) in (18.39) ab?Dazu l�osen wir die Eigenwertglei hung D(~r0) = det[H(~r0)� �E2℄ = 0. Aus(a� �)( � �)� b2 = 0 folgt �2 � �(a+ ) + a � b2 = 0 (18.42)und damit f�ur � = �1 und � = �2� = a+ +p(a� )2 + 4b22 und � = a+ �p(a� )2 + 4b22 : (18.43)Wie ganz allgemein f�ur die beiden L�osungen einer quadratis hen Glei hung giltdamit � + � = a+ (18.44)und � � � = a � b2 = D(~r0) : (18.45)Falls also D(~r0) > 0, a > 0 und > 0, so m�ussen beide Eigenwerte positiv sein| und damit muss ein lokales Minimum der Funktion f an der Stelle ~r0 vorliegen.Falls D(~r0) > 0, a < 0 und < 0, so m�ussen beide Eigenwerte negativ sein | dieFunktion hat also ein lokales Maximum. FallsD(~r0) < 0, so handelt es si h um einenSattelpunkt, und falls D(~r0) = 0, so kann die Natur des station�aren Punktes ni htaus dem quadratis hen Term Q der Taylorentwi klung abgeleitet werden, vielmehrm�ussen Terme h�oherer Ordnung betra htet werden. Der letzte Fall entspri ht ineiner Dimension der Situation, dass sowohl die erste als au h die zweite Ableitungeiner Funktion f(x) an der Stelle x0 vers hwinden.Damit w�aren die Bedingungen (18.37) hergeleitet. Wie im Fall von Funktioneneiner unabh�angigen Variablen sind wir mit diesem Ergebnis nun in der Lage, lokaleEigens haften von Funktionen zweier Variabler exakt zu untersu hen. 2BEMERKUNG: Betra htet man Funktionen mehrerer Variabler, so k�onnen mitHilfe der Eigenwerte der entspre henden Hesse-Matrix analoge Betra htungen zurNatur von station�aren Punkten dur hgef�uhrt werden.18.7 Ausbli kDie hier entwi kelten Te hniken k�onnen lei ht auf Funktionen beliebiger Dimensionund au h auf vektorwertige Funktionen verallgemeinert werden. Damit stehen Ih-nen insgesamt die Grundlagen eines breiten Repertoires mathematis her Methoden

18.8. AUFGABEN 275zur Verf�ugung. So k�onnen Sie nun beispielsweise die Dynamik von mehrdimensiona-len Systemen (z.B. R�auber-Beute-Systeme, Di�usionsprozesse, Musterbildung, et .)mit Hilfe von gekoppelten bzw. Partiellen Di�erentialglei hungen in glei herWeise untersu hen, wie wir dies f�ur eindimensionale Systeme mit Hilfe gew�ohn-li her Di�erentialglei hungen in Kapitel 13 und 14 getan haben. Weiterhin lassensi h beispielsweise Methoden der Integrationsre hnung im Rahmen der sogenanntenFourieranalyse dazu einsetzen, periodis he Strukturen in r�aumli hen oder zeitli- hen Messreihen aufzusp�uren.Derartige Anwendungen mathematis her Methoden auf biologis he Probleme wer-den in der Vorlesung \Theoretis he Biologie A" (Wintersemester) behandelt. Kon-zeptionelle Fragen, vor allem der Evolutionstheorie, sind Inhalt der Vorlesung \Theo-retis he Biologie B" (Sommersemester). Im Hauptstudium folgen Spezialvorlesun-gen, Seminare und Computerpraktika mit den S hwerpunkten Molekulare Evo-lution, Organismis he Evolution und Theorie Neuronaler Systeme. Siek�onnen diese Veranstaltungen au h zu einem Nebenfa h{Studium in \Theoretis herBiologie" verbinden.S hlie�li h sei no h erw�ahnt, dass experimentelle Messungen immer Me�fehler bein-halten, und dass man au h in vielen Modellen ni ht wie bisher von deterministi-s hen sondern von sto hastis hen Prozessen ausgeht. Beide Themenkreise wer-den in f�unf fakultativen Vorlesungen in der si h nun ans hlie�enden zweiten H�alftedes Sommersemesters diskutiert.18.8 AufgabenGegeben sei die Ebene E(x; y) = x+ y sowie die Funktionenf(x; y) = �x2 � y2 , g(x; y) = �4x2 � (y � 1)2 ,h(x; y) = x2 � y2 und k(x; y) = 3 + 4x+ 2y + x2 � y2 von R�R! R .1. (Funktionen mehrerer Variabler) NiveaulinienBere hnen und skizzieren sie (soweit existent) die Niveaulinien z(x; y) = der vierFunktionen E(x; y) , f(x; y) , g(x; y) und h(x; y) f�ur (i) 1 = 0 , (ii) 2 = 1 und (iii) 3 = �1 .2. (Partielle Ableitungen)Bilden sie folgende partielle Ableitungen:�f(x; y)�x , �f(x; y)�y , �2f(x; y)�x2 , �2f(x; y)�y2 , �2f(x; y)�x�y , �2f(x; y)�y�x , �k(x; y)�x , �k(x; y)�y ,�2k(x; y)�x2 , �2k(x; y)�y2 , �2k(x; y)�x�y und �2k(x; y)�y�x .3. (Partielle Ableitungen) Taylorentwi klungEntwi keln sie die Funktionen f(x; y) und k(x; y) bis zur quadratis hen Ordnungum die Punkte P1 = (0; 0) und P2 = (�2; 1) na h Taylor.4. (Partielle Ableitungen) Gradient und Ri htungsableitung

276 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERBere hnen sie den Gradienten der vier Funktionen f(x; y), g(x; y), h(x; y) undk(x; y) . Bestimmen sie nun no h die Ri htungsableitungen dieser vier Funktionenentlang der Vektoren ~v1 = (1; 1) und ~v2 = (1;�2) .5. (Partielle Ableitungen) Lokale ExtremaBestimmen und klassi�zieren (lokales Maximum, Minimum oder Sattelpunkt?) siedie station�aren Punkte der vier Funktionen f(x; y), g(x; y), h(x; y) und k(x; y) .6. (Partielle Ableitungen) Partielle Di�erentialglei hungen I: Wellenglei- hungEine Glei hung der Form �2f(x; t)�t2 = a�2f(x; t)�x2hei�t Wellenglei hung (oder d'Alembert{Glei hung).(a) Unter wel her Bedingung erf�ullt die Funktion f(x; t) = exp[i(kx � !t)℄ dieWellenglei hung?Bilden sie dazu die partiellen Ableitungen �2f(x; t)�x2 und �2f(x; t)�t2 und setzen siediese in die Wellenglei hung ein.(b) Zeigen sie: Jede Funktion der Form y = f(x� t) oder y = f(x+ t) ist L�osung derWellenglei hung mit der Ges hwindigkeit = pa . Wel he Ges hwindigkeit erhaltensie somit f�ur die in (a) gefundene L�osung?7. (Funktionen mehrerer Variabler) 3{D PlotBetra hten sie den folgenden Graphen der Funktion z(x; y) . Stellt er eine der Funk-tionen f , g, h oder k dar oder ni ht? Wenn ja, wel he?
−5
0
5
−5
0
5−40
−30
−20
−10
0
10
20
30
40
50
xy
z(x,
y)

18.8. AUFGABEN 2778. (Funktionen mehrerer Variabler)Untersu hen sie die Funktionen f(x; y) = (1 + sinx)(1 + y2) und g(x; y) = e�x2�y2auf Nullstellen und Extremwerte.9. (Partielle Ableitung) Produktregel(a) Zeigen sie, dass f�ur die Gradientenbildung des Produktes zweier skalarer Funk-tionen f(x; y) und g(x; y) folgende Produktregel gilt:~r(fg) = g ~rf + f ~rg :(b) Bere hnen sie damit den Gradienten der Funktion h(x; y) = (x2 + y2)e�x2�y2 .10. (Partielle Ableitung) Tangentialebene und Tangentenglei hungEntwi keln sie die Funktion z = f(x; y) = xy2 � yx3 um den Punkt (1, 2) bis zurlinearen Ordnung na h Taylor. Geometris h betra htet, haben sie damit die Ebenegefunden, die die Funktion f(x; y) im Punkt (1, 2) bestm�ogli h approximiert. Diesist die Tangentialebene T an f in (1, 2). Wenn sie nun no h die TangentialebeneT mit der Ebene z = 2 s hneiden, so erhalten sie die Tangente t an die Kurvexy2 � yx3 = 2. Ohne diese Beziehung na h x oder y aufzul�osen, k�onnen sie somitdie Glei hung der Tangente dieser Kurve im Punkt (1, 2) bestimmen. Wie lautetsie?11. (Partielle Ableitung) Kugelsymmetrie(a) Bere hnen sie f�ur den Betrag des Ortsvektors r = j~rj = px21 + : : :+ x2n denGradienten in 2, 3 und n Dimensionen.(b) Zeigen sie: Falls f(x; y) nur vom Abstand des Punktes (x; y) vom Ursprungabh�angt, d.h. falls f(x; y) = f(px2 + y2) = f(r) mit r =px2 + y2 gilt, dann kannman den Gradienten wie folgt bere hnen:~rf = �f�r ~rr (18.46)mit dem Ortsvektor ~r = �xy� . H�angt Ihr Beweis der Beziehung (18.46) von der Zahlder Dimensionen (hier 2) ab, oder gilt (18.46) au h in n Dimensionen?( ) Bere hnen sie den Gradienten f�ur f(x; y) = exp(�x2 � y2) sowie f�ur das Cou-lombpotential in drei Dimensionen �(x; y; z) = a=px2 + y2 + z212. (Partielle Ableitung) Partielle Di�erentialglei hungen II: Di�usionsglei- hungEine Glei hung der Form �f(x; t)�t = D�2f(x; t)�x2hei�t Di�usionsglei hung (oder W�armeleitungsglei hung).F�ur wel he Di�usionskonstante D erf�ullt die Funktionf(x; t) = 1p2�t exp(�x22t )

278 KAPITEL 18. FUNKTIONEN MEHRERER VARIABLERdie Di�usionsglei hung? Skizzieren sie f(x; t) f�ur die Zeiten t = 1, 2, 3 und 4.Eine kleine Galerief(x; y) = (1 + sinx)(1 + y2) f(x; y) = xy2 � yx3−10
−5
0
5
10
−5
0
50
10
20
30
40
50
60
xy
f(x,
y)
−2−1.5−1−0.500.511.52
−2
0
2
4
6
−30
−20
−10
0
10
20
30
yx
f(x,
y)
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0
0.5
1
1.5
2
0
0.5
1
xy
f(x,
y)
−5 −4 −3 −2 −1 0 1 2 3 4 50
2
4
60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
xt
f(x,
t)
f(x; y) = (x2 + y2)e�x2�y2 f(x; t) = 1p2�t exp(�x22t )

Anhang AL�osungen der AufgabenA.1 Aufgaben zu Kapitel 11. (Bru hre hnen) Bestimmen Sie(a) 65 � 103 = 2�3�2�55�3 = 4(b) 2197 � 1973 = 23( ) 322 � 13 = 32(d) 32 + 52 = 82(e) 13 + 14 = 4+312 = 712
(f) 32 � 23 = 9�46 = 56(g) 23 � 54 = 8�1512 = � 712(h) 25310 = 25 � 103 = 43(i) 571021 = 57 � 2110 = 322. (Summen) Bere hnen Sie folgende Summen:(a) 5Xk=1 k = 1 + 2 + 3 + 4 + 5 = 15(b) 4X�=2�2 = 22 + 32 + 42 = 4 + 9 + 16 = 29( ) 6Xn=4(n� 2)2 = 4X�=2�2 = 29 (mit � = n� 2)3. (Betrag, Unglei hung) F�ur wel he x sind folgende Unglei hungen erf�ullt?Die De�nition des Betrags von x : jxj := 8<: x : x � 0�x : x < 0(a) jxj < 2, (x � 0 und x < 2) oder (x < 0 und x > �2), �2 < x < 2(b) jx� 1j > 2, (x� 1 � 0 und x� 1 > 2) oder (x� 1 < 0 und � (x� 1) > 2)279

280 ANHANG A. L �OSUNGEN DER AUFGABEN, (x � 1 und x > 3) oder (x < 1 und x < �1), x > 3 oder x < �1( ) jx+ 2j � 4, (x+ 2 � 0 und x+ 2 � 4) oder (x+ 2 < 0 und � (x+ 2) � 4), (x � �2 und x � 2) oder (x < �2 und x � �6), �6 � x � 24. (Summen) Bere hnen Sie folgende Summen:(a) 4Xi=1 i = 1 + 2 + 3 + 4 = 10(b) 3Xm=0(m+ 1) = 1 + 2 + 3 + 4 = 10( ) 5X�=2 3 = 3 5X�=2 1 = 3 � 4 = 12(d) NX�=1 a = a NX�=1 1 = aN(e) 4Xq=1 2q = 2 + 22 + 23 + 24 = 2 + 4 + 8 + 16 = 30(f) 3Xn=1n2 = 12 + 22 + 32 = 1 + 4 + 9 = 14(g) 5Xq=3(q � 2)2 = 3Xn=1n2 = 14 wobei n = q � 2 gesetzt wurde; vgl. 1f(h) 4Xa=0 a� 4Xb=0 b = 0 (Der Wert der Summe ist unabh�angig vom Lau�ndex)(i) 4X�=0 �2 � 3X�=0�2 = 3X�=0 �2 + 42 � 3X�=0 �2 = 42 = 165. (Summen) S hreiben Sie folgende Summen ohne Summenzei hen:(a) 6X�=2x� = x2 + x3 + x4 + x5 + x6geometris he Reihe allgemein: nX�=0x� = xn+1 � 1x� 1 , hier: x7 � 1x� 1 � x� 1(b) 5Xk=1(�1)k xkk = �x+ x22 � x33 + x44 � x556. (Summen) S hreiben Sie folgende Summen mit dem Summenzei hen:(a) 1 + x+ x2 + x3 + x4 + : : :+ x20 = 20Xk=0 xk

A.1. AUFGABEN ZU KAPITEL 1 281(b) x+ 4x2 + 9x3 + 16x4 + : : :+ 100x10 = 10Xk=1 k2xk( ) 1� x+ x2 � x3 + x4 � : : :+ x8 = 8Xk=0(�1)kxk(d) x� x22 + x33 � x44 + : : :� x1212 = 12Xk=1(�1)k+1xkk7. (Summen, Mittelwert, Varianz) Werden bei einem Experiment n Me�werte x1,x2, . . . , xn gemessen, dann hei�tx = 1n nXi=1 xi \arithmetis hes Mittel" und (1.1)�2x = 1n nXi=1(xi � x)2 \Varianz". (1.2)Zeigen Sie: �2x = x2 � x2 (1.3)wobei x2 = 1n nXi=1 x2i (1.4)Bemerkung: �x =p�2x hei�t \Standardabwei hung".�2x = 1n nXi=1(xi � x)2= 1n nXi=1(x2i � 2xix+ x2)= 1n nXi=1 x2i � 1n nXi=1 2xix+ 1n nXi=1 x2= x2 � 2x 1n nXi=1 2xi + x2 1n nXi=1 1= x2 � 2x � x+ x2= x2 � x28. (Betrag, Unglei hung) F�ur wel he x sind folgende Unglei hungen erf�ullt?(a) 3jx� 1j < 4, jx� 1j < 43, (x� 1 � 0 und x� 1 < 43 ) oder (x � 1 < 0 und � (x � 1) < 43 ), (x � 1 und x < 73 ) oder (x < 1 und x > � 13 ), (1 � x < 73 ) oder (� 13 < x < 1), � 13 < x < 73

282 ANHANG A. L �OSUNGEN DER AUFGABEN(b) ���x� j1j��� � 2, jx� 1j � 2, (x� 1 � 0 und x� 1 � 2) oder (�(x� 1) � 2 und x� 1 < 0), x � 3 oder x � �1, also x 2R n (-1,3 )( ) jxj � 12x+ 1, (x � 0 und x � 12x+ 1) oder (x < 0 und � x � 12x+ 1), (x � 0 und x � 2) oder (x < 0 und x � � 23 ), � 23 � x � 2(d) j2x� 4j > 8x+ 1, (2x� 4 � 0 und 2x� 4 > 8x+ 1) oder (2x� 4 < 0 und � (2x� 4) >8x+ 1), (x � 2 und 6x < �5)| {z }ni ht erf�ullbar oder (x < 2 und 10x < 3), (x < 2 und x < 310 ), x < 3109. (Beispiel aus der Gew�asserbiologie) Die K�o her iegenlarven der Gattung Hy-dropsy he leben am Boden von Flie�gew�assern. Dort bauen sie kleine Netze (dur h-s hnittli he Anstr�om �a he AH = 48 mm2), die das in dem Wasser driftende orga-nis he Material (sog. Seston: Plankton, kleine Makroinvertebraten (z.B. Insekten),abgestorbenes P anzenmaterial) herraus�ltern, wovon sie si h dann ern�ahren. Umabs h�atzen zu k�onnen, wel he Nahrungsmenge den Larven pro Tag zur Verf�ugungsteht, wird an einem Tag alle 2 Stunden eine Driftmessung dur hgef�uhrt. Dazuwird ein Driftnetz mit kreisrunder �O�nung (Dur hmesser d = 11:3 m) f�ur jeweilseine halbe Stunde (= �t) in dem Flie�gew�asser aufgestellt. Dabei wurden folgendeMengen mi an Seston aus dem Wasser ge�ltert:Uhrzeit 1:00 3:00 5:00 7:00 9:00 11:00 13:00 15:00 17:00 19:00 21:00 23:00mi/g 1.1 2.8 1.5 1.1 1.8 1.7 1.6 1.7 1.2 1.4 1.2 1.5Die Flie�ges hwindigkeit betrug v = 40 m/s.(a) Wel he Anstr�om �a he A hat das Driftnetz?A = �r2 = � �d2�2 = � 11:324 m2 � 100 m2 (3 g�ultige Stellen)(b) Wieviel Tro kengewi ht (TG) Seston m wurde im Dur hs hnitt in einer halbenStunde mit dem Driftnetz aus demWasser ge�ltert? Wie gro� ist die zugeh�origeStandardabwei hung? m = 112 12Xi=1mi = 1:55g ;�2m = m2 �m2= 2:5983 g2 � 2:4025 g2= 0:1958 g2! �m = 0:44g (Die einzelnen Massen waren auf zwei Stellen genau angege-ben)

A.1. AUFGABEN ZU KAPITEL 1 283( ) Wie gro� ist die Seston ussdi hte j = mA�t (Sestontro kenmasse pro Quer-s hnitts �a he und Zeit in mg m2min ?j = mA ��t= 1:55 g100 m2 � 30 min= 1:553000 � 1000 mg m2min� 0:52 mg m2min(d) Wel he Stre ke legt ein Wassermolek�ul in diesem Flie�gew�asser in einer halb-en Stunde zur�u k? Wel hes Wasservolumen V (in Litern) ist in einer halbenStunde dur h das Netz ge ossen?Angenommen, das Wassermolek�ul iesst mit der Fliessges hwindigkeit v =40 ms , dann legt es in einer halben Stunde (30 min bzw. 1800 s)l = v ��t= 40 ms � 1800 s = 72 000 mzur�u k. Dur h das Netz sind dannV = A � l = 100 m2 � 72 000 m= 7:2 � 106 m3 = 7200 l = 7:2 m3ge ossen.(e) Wie gro� ist die Sestonkonzentration � (Milligramm Seston TG pro Liter Was-ser)?Da in einer halben Stunde 7200 l Wasser dur h das Netz iessen und im Mitteldabei 1.55 g herausge�ltert werden k�onnen, ist� = 1:557200 � gl= 0:00022 gl = 0:22 mgl(f) Wieviel Milligramm Seston TG hat das Netz der K�o her iege an einem Tagaus dem Wasser ge�ltert?Die Larve �ltert mit ihrem Netz pro Tag (T = 24 � 60min)mH = j � AH � T= 0:52 mg m2 min � 0:48 m2 � 1440 min = 360 mg(g) Die Tiere des 5. Larvenstadiums vonHydropsy he pellu idula haben ein Tro ken-gewi ht von dur hs hnittli h 7.6 mg. Um zu �uberleben, ben�otigen sie t�agli h85% ihres K�orpergewi htes an Nahrung. Rei ht also die in ihr Netz gedrifteteMenge an Seston aus?In das Netz driften 360 mg � 1007:6 mg = 4700 %ihres K�orpergewi hts.

284 ANHANG A. L �OSUNGEN DER AUFGABENA.2 Aufgaben zu Kapitel 21. (Funktionen) Skizzieren Sie folgende Funktionen f : R! R:(a) f(x) = x(b) f(x) = 2x( ) f(x) = x=2(d) f(x) = 2x+ 3 (e) f(x) = �2x+ 3(f) f(x) = 2x� 3(g) f(x) = �2x� 3(h) f(x) = x2 (i) f(x) = 2x2(j) f(x) = x2=2(k) f(x) = x3(l) f(x) = 1=x−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
f(x) = xf(x) = 2xf(x) = x/2
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
2x+3−2x+3 2x−3−2x−3
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
x2
2x2
x2/2
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
x3
1/xAbbildung A.1: zu Aufgabe 1 von Kapitel 2

A.2. AUFGABEN ZU KAPITEL 2 2852. (Quadratis he Glei hungen)Vorbemerkung: Ein Produkt ist genau dann Null, wenn einer seiner Faktoren Nullist (und keiner divergiert; siehe sp�ater). Das heisst f�ur quadratis he Glei hungender Form (x � a)(x� b) = 0 () x2 � (a+ b)x+ ab = 0kann man die beiden L�osungen x1 = a und x2 = b aus der linken Form sofort able-sen. Mitunter gelingt es aber au h aus der Form x2+px+q = 0 die Faktorzerlegungindirekt abzulesen und zwar dann, wenn es gelingt, die Zerlegung �p = a + b undq = ab zu "sehen\ (Satz von Vieta). Nat�urli h bleibt aber immer der Weg �uber diepq{Formel x1;2 = �p2 �rp24 � q :Hier nun:(a) (x� 2)2 = 0 , x� 2 = 0 , x = 2(b) 2(x+3)2 = 8 , (x+3)2 = 4 , x1;2+3 = �p4 , x1;2 = �3�2 ,x1 = �1 ; x2 = �5( ) (x� 1)(x+ 2) = 0 , x� 1 = 0 oder x+ 2 = 0 , x1 = 1 ; x2 = �2(d) x(x � 1) = 0 , x1 = 0 ; x2 = 1(e) x2 + 2x = 0 , x(x+ 2) = 0 , x1 = 0 ; x2 = �2(f) 4x2 � 3x = 0 , x(4x� 3) = 0 , x1 = 0 ; x2 = 34(g) x2 + 2x� 3 = 0 , (x+ 3)(x� 1) = 0 , x1 = �3 oder x2 = 1(h) x2 = 3x+ 4 , x2 � 3x� 4 = 0 , (x � 4)(x+ 1) = 0 ,x1 = 4 oder x2 = �1(i) 12x2 + x = 3 , 12x2 + x� 3 = 0 , x2 + 2x� 6 = 0 ,x1;2 = �1�p1 + 6 , x1;2 = �1�p73. (Quadratis he Glei hung) Eine Stre ke soll so geteilt werden, dass der k�urzereTeil si h zu dem l�angeren Teil so verh�alt, wie der l�angere Teil zur ganzen Stre ke.Wie lang ist der l�angere Teil relativ zur ganzen Stre ke? Dieses Verh�altnis wirdGoldener S hnitt genannt.b c
a
Randbedingungen: (I) b+ = a und (II) b = ab , b2 = a I in II: b2 + ab � a2 = 0 , ( ba )2 + ( ba ) � 1 = 0 , ( ba )1;2 = � 12 �q 14 + 1 =� 12 �q 54 = �1�p52

286 ANHANG A. L �OSUNGEN DER AUFGABENDa die negative L�osung geometris h keinen Sinn ergibt, istba = p5� 12 � 0:618die L�osung.4. (S heitelpunktglei hung) Wo liegt der S heitel folgender Parabeln? Sind dieParabeln na h oben oder na h unten ge�o�net?Allgemein hat die Parabel y = ax2 + bx+ = a�x+ b2a2�� Damit D = b24 � a ihren S heitelpunkt bei xS = � b2a und yS = �Da . Die Parabel istna h oben ge�o�net, falls a > 0 gilt.(a) f(x) = 2(x+ 3)2 � 2 ! S : (�3;�2); oben(b) f(x) = x2 + 2x ! a = 1; b = 2; = 0 ! D = 1 ! S :(�1;�1); oben( ) f(x) = �4x2 + 12x ! a = �4; b = 12; = 0 ! D = 36 ! S :( 32 ; 9); unten(d) f(x) = x2 + 2x � 3 ! a = 1; b = 2; = �3 ! D = 4 ! S :(�1;�4); oben(e) f(x) = �2x2 + 6x + 4 ! a = �2; b = 6; = 4 ! D = 17 ! S :( 32 ; 172 ); unten(f) f(x) = (x � 2)(x � 4) ! a = 1; b = �6; = 8 ! D = 1 ! S :(3;�1); oben(g) f(x) = 2(x � 3)(x + 5) = 2x2 + 4x � 30 ! a = 2; b = 4; = �30 !D = 64 ! S : (�1;�32); oben(h) f(x) = x(x � 1) + 2 = x2 � x + 2 ! a = 1; b = �1; = 2 ! D =� 74 ! S : ( 12 ; 74 ); oben5. (Beispiel aus der Physik: Wurfparabel) Wird am Ort x0 = 0 ein Ball in die Luftgeworfen, dann entspri ht (bei Verna hl�assigung der Luftreibung) seine Bewegungfolgender Parabel: h(x) = vyvxx� 12 gv2xx2 (1.5)Darin ist g die Erdbes hleunigung, vx 6= 0 die horizontale und vy die vertikaleGes hwindigkeitskomponente beim Loslassen des Balls. h(x) ist die H�ohe des Ballsh in Abh�angigkeit vom Ort x.h(x) = vyvxx� 12 gv2xx2 = ax2 + bx+ mit a = �12 gv2x ; b = vyvx ; = 0(a) Wel he H�ohe errei ht der Ball maximal? Wie weit ist er bis dahin ge ogen?Der S heitelpunkt liegt beixS = � b2a = � vyvx2(� 12 ) gv2x = vxvyg mit h(xS) = vyvx vyvxg � g2v2x v2yv2xg2 = v2y2g! hmax = hxS = v2y2g ; bis dahin ist der Ball xS = vxvyg weit ge ogen.
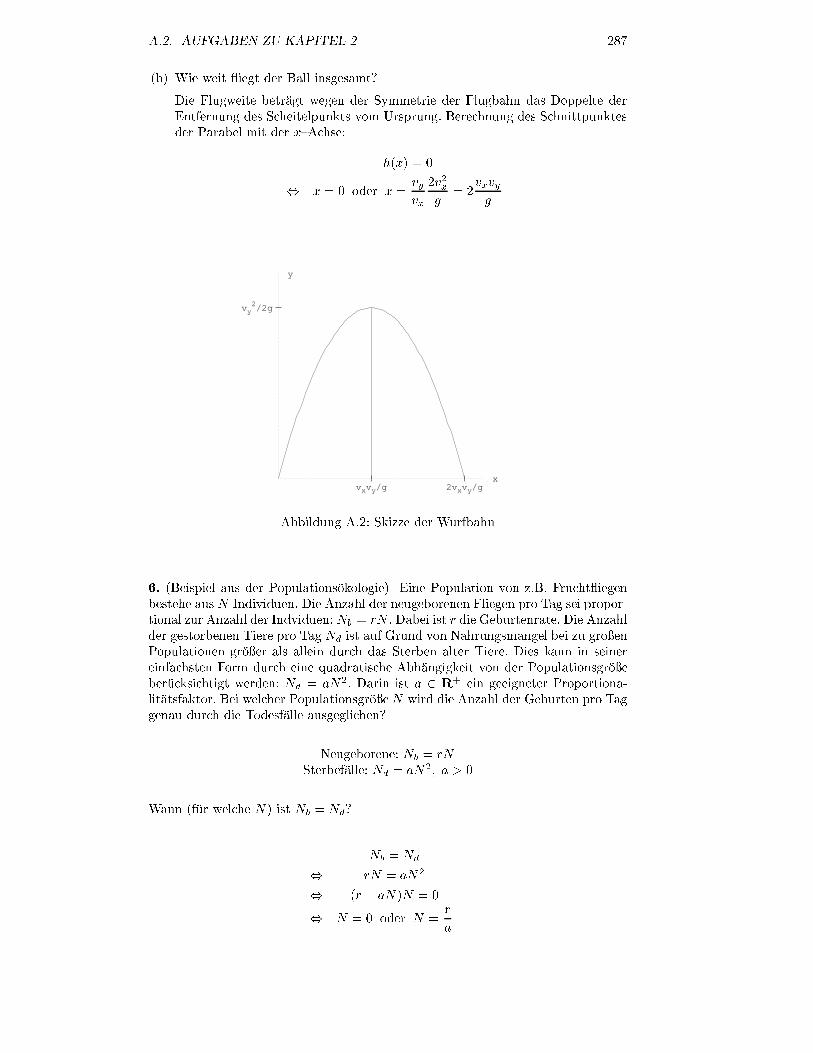
A.2. AUFGABEN ZU KAPITEL 2 287(b) Wie weit iegt der Ball insgesamt?Die Flugweite betr�agt wegen der Symmetrie der Flugbahn das Doppelte derEntfernung des S heitelpunkts vom Ursprung. Bere hnung des S hnittpunktesder Parabel mit der x{A hse: h(x) = 0, x = 0 oder x = vyvx 2v2xg = 2vxvygvy
2/2g
vxvy/g 2vxvy/gx
y
Abbildung A.2: Skizze der Wurfbahn6. (Beispiel aus der Populations�okologie) Eine Population von z.B. Fru ht iegenbestehe aus N Individuen. Die Anzahl der neugeborenen Fliegen pro Tag sei propor-tional zur Anzahl der Indviduen:Nb = rN . Dabei ist r die Geburtenrate. Die Anzahlder gestorbenen Tiere pro Tag Nd ist auf Grund von Nahrungsmangel bei zu gro�enPopulationen gr�o�er als allein dur h das Sterben alter Tiere. Dies kann in seinereinfa hsten Form dur h eine quadratis he Abh�angigkeit von der Populationsgr�o�eber�u ksi htigt werden: Nd = aN2. Darin ist a 2 R+ ein geeigneter Proportiona-lit�atsfaktor. Bei wel her Populationsgr�o�eN wird die Anzahl der Geburten pro Taggenau dur h die Todesf�alle ausgegli hen?Neugeborene: Nb = rNSterbef�alle: Nd = aN2; a > 0Wann (f�ur wel he N) ist Nb = Nd? Nb = Nd, rN = aN2, (r � aN)N = 0, N = 0 oder N = ra

288 ANHANG A. L �OSUNGEN DER AUFGABEN7. (Umkehrfunktion) Wie lauten die Umkehrfunktionen folgender Funktionen? F�urwel he x sind die Funktionen bzw. ihre Umkehrfunktionen �uberhaupt de�niert?(a) y = 2(x+ 3)2 � 2, y + 22 = (x+ 3)2, x+ 3 = �ry2 + 1, x = �3�ry2 + 1; y � �2Um nun eine bijektive und damit umkehrbare Funktion zu erhalten, muss manden De�nitionsberei h eins hr�anken und die Zielmenge auf die Wertemengebegrenzen (vgl. die Umkehrung von x2 im Skript). Hier ist y � �2 die Wer-temenge und f�ur x � �3 ist die positive Wurzel die Umkehrfunktion und f�urx � �3 die negative.(b) y = �2x2 + 6x+ 4, y = �2(x� 32)2 + 172, 174 � y2 = (x� 32)2, x = 32 �r174 � y2 ; y � 172Hier ist y � 172 die Wertemenge und f�ur x � 32 ist die positive Wurzel dieUmkehrfunktion und f�ur x � 32 die negative.( ) y = 3px� 2, x� 2 = y29, x = 19y2 + 2F�ur y � 0 ist dies die gesu hte Umkehrfunktion.(d) F�ur y(x) = px2 + 4 ist y(x) = y(�x) , also ist y ni ht injektiv und somit ni htumkehrbar. Erst unter der Eins hr�ankung x � 0 oder x � 0 und der Angabeder Wertemenge y � 2 kann die Umkehrfunktion gebildet werden und es isty =px2 + 4, x2 = y2 � 4, x = �py2 � 4; y � 28. (Umkehrfunktionen)(a) Wel he Geraden y = mx+ b sind identis h mir ihrer Umkehrfunktion?Umkehrfunktion zu y = mx+ b ist x = 1m (y � b) = 1my � bmBeide Funktionen sind glei h, falls
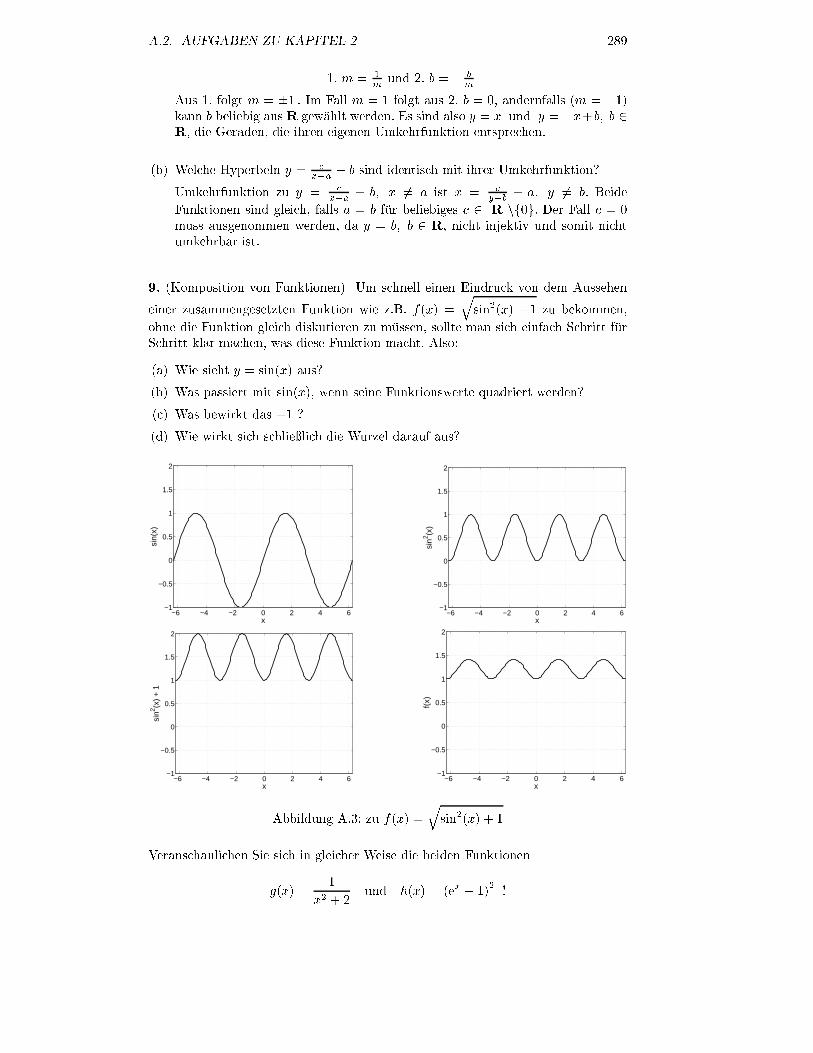
A.2. AUFGABEN ZU KAPITEL 2 2891. m = 1m und 2. b = � bmAus 1. folgt m = �1 . Im Fall m = 1 folgt aus 2. b = 0, andernfalls (m = �1)kann b beliebig aus R gew�ahlt werden. Es sind also y = x und y = �x+b; b 2R, die Geraden, die ihren eigenen Umkehrfunktion entspre hen.(b) Wel he Hyperbeln y = x�a + b sind identis h mit ihrer Umkehrfunktion?Umkehrfunktion zu y = x�a + b; x 6= a ist x = y�b + a; y 6= b. BeideFunktionen sind glei h, falls a = b f�ur beliebiges 2 R nf0g. Der Fall = 0muss ausgenommen werden, da y = b; b 2 R, ni ht injektiv und somit ni htumkehrbar ist.9. (Komposition von Funktionen) Um s hnell einen Eindru k von dem Ausseheneiner zusammengesetzten Funktion wie z.B. f(x) = qsin2(x) + 1 zu bekommen,ohne die Funktion glei h diskutieren zu m�ussen, sollte man si h einfa h S hritt f�urS hritt klar ma hen, was diese Funktion ma ht. Also:(a) Wie sieht y = sin(x) aus?(b) Was passiert mit sin(x), wenn seine Funktionswerte quadriert werden?( ) Was bewirkt das +1 ?(d) Wie wirkt si h s hlie�li h die Wurzel darauf aus?−6 −4 −2 0 2 4 6
−1
−0.5
0
0.5
1
1.5
2
x
sin(
x)
−6 −4 −2 0 2 4 6−1
−0.5
0
0.5
1
1.5
2
x
sin2 (x
)
−6 −4 −2 0 2 4 6−1
−0.5
0
0.5
1
1.5
2
x
sin2 (x
) +
1
−6 −4 −2 0 2 4 6−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Abbildung A.3: zu f(x) =qsin2(x) + 1Verans hauli hen Sie si h in glei her Weise die beiden Funktioneng(x) = 1x2 + 2 und h(x) = (ex � 1)2 !

290 ANHANG A. L �OSUNGEN DER AUFGABEN
−2 −1 0 1 20
0.5
1
1.5
2
2.5
3
3.5
4
x
zu g
(x)
x2
x2 + 21/(x2+2)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−1
0
1
2
3
4
5
6
x
zu h
(x)
ex
ex − 1(ex−1)2
Abbildung A.4: zu g(x) = 1x2+2 (links) und h(x) = (ex � 1)2 (re hts)10. (Komposition von Funktionen) Skizzieren Sie die Funktion f : R+ ! R; x 7!(x + 1)e�4x. �Uberlegen Sie si h dazu die Form der einzelnen Komponenten dieserFunktion. Wel hen De�nitionsberei h, wel he Ziel- und Wertemenge hat die Funk-tion? Ist sie injektiv und/oder surjektiv? Kann man f umkehren?
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
x
zu f(
x)
e−4x
x e−4x
f(x)
Abbildung A.5: zu f(x) = (x+ 1)e�4xDie De�nitionsmenge istR+ , die Zielmenge istR, die Wertemenge (0; 1) . Die Funk-tion ist injektiv. Surjektiv ist sie erst, wenn man die Zielmenge auf (0; 1) eins hr�ankt.Unter dieser Eins hr�ankung ist f(x) dann au h umkehrbar.11. (Komposition von Funktionen) Skizzieren Sie die Graphen der Funktionenf(x) = �x3 + 4x und g(x) = 12x4 � 2x2! �Uberlegen Sie si h dazu, wie si h dieFunktionen f�ur sehr gro�e und sehr kleine Werte von x verhalten (d.h. asymptotis h(jxj ! 1) und in der N�ahe von Null (jxj � 1)), und bere hnen Sie die Nullstellen.Sie sollen ni ht die Lage eventueller Extremstellen bere hnen!Skizzieren Sie au�erdem den Graphen der Gau�funktion f(x) = e�x2 . Kann dieseFunktion Nullstellen haben?f(x) = �x3 + 4x = x � (4� x2)1. Nullstellen: x1 = 0; x2;3 = �2

A.2. AUFGABEN ZU KAPITEL 2 2912. limx!1 f(x) = �13. limx!�1 f(x) =14. F�ur 0 < x� 1 ist x > x3 ! 4x-Term dominant ! f(x) > 05. F�ur �1 � x < 0 ist x < x3 < 0 aber jxj > jx3j ! 4x-Term dominant !f(x) < 0g(x) = 12x4 � 2x2 = 12x2(x2 � 4)1. Nullstellen: x1 = 0, sowie x2;3 = �2, wie f(x)2. limx!1 g(x) =13. limx!�1 g(x) =14. F�ur 0 < x� 1 ist x2 > x4 ! �2x2 dominant ! g(x) < 05. F�ur �1� x < 0 ist ebenfalls �2x2 dominant ! g(x) < 0−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−4
−2
0
2
4
x
f(x)
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1
0
1
2
3
4
x
g(x)
Abbildung A.6: f(x) = �x3+4x = x �(4�x2) (links) und g(x) = 12x4�2x2 (re hts)f(x) = e�x2 hat keine Nullstelle, da ex > 0 f�ur alle x 2 Rlimx!�1 f(x) = 0 und f(0) = 112. (Beispiel aus der Neurobiologie) In den Membranen von Zellen sind Ionen-pumpen eingebaut, die bestimmte Ionensorten dur h die Membran pumpen. Da-dur h ist z.B. die Konzentration von Kalium-Ionen innerhalb der Zelle um das
−3 −2 −1 0 1 2 3
0
0.2
0.4
0.6
0.8
1
x
exp(
−x2 )
Abbildung A.7: f(x) = exp(�x2)

292 ANHANG A. L �OSUNGEN DER AUFGABENzwanzigfa he h�oher als im extrazellul�aren Medium. Die Natrium-Konzentrationist dagegen au�erhalb der Zelle um das f�unfzehnfa he gr�o�er als innerhalb. Wei-terhin gibt es Ionenkan�ale, die spezi�s h bestimmte Ionensorten dur h die Mem-bran ie�en lassen. Wenn nur Ionenkan�ale in die Zellmembran eingebaut sind, dief�ur Kalium-Ionen dur hl�assig sind, dann stellt si h bei dem sogennanten Kalium-Glei hgewi htspotential EK ein Glei hgewi ht zwis hen dem dur h den Konzen-trationsunters hied hervorgerufenen Ionen-R�u k u� und dem diesen entgegenwir-kenden elektris hen Feld ein, wel hes si h dur h den Ionen u� aufbaut. F�ur dasGlei hgewi htspotential der Ionensorte X gilt allgemein die Nernst's he FormelEX = 58mV� log10 [X ℄o[X ℄i ; (1.6)wobei [X ℄i die Ionenkonzentration innerhalb der Zelle und [X ℄o die Ionenkonzen-tration au�erhalb der Zelle ist.(a) Wo liegen die Glei hgewi htspotentiale von Kalium und Natrium (EK undENa)?Verh�altnis der Ionenkonzentrationen:[K+℄i = 20[K+℄o[Na+℄o = 15[Na+℄iEK = 58mV � log10 [K+℄o[K+℄i= 58mV � log10 [K+℄o20[K+℄o= �75mVENa = 58mV � log10 [Na+℄o[Na+℄i= 58mV � log10 15[Na+℄i[Na+℄i= 68mVF�ur den elektris hen Strom I , den die Ionen beim Dur h ie�en eines Kanals verur-sa hen, gilt n�aherungswei�e das Ohms he Gesetz:I = g(V �E) : (1.7)Dabei ist V die elektris he Spannung, die �uber der Membran anliegt, g die Leitf�ahig-keit des Kanals, dur h den die Ionen ie�en (der Widerstand ist R = 1=g) und Edas Glei hgewi htspotential der entspre henden Ionensorte.Skizzieren Sie die Strom-Spannungskennlinien (d.h. I(V )) f�ur folgende F�alle (zei h-nen Sie f�ur (b), ( ), (d), (e) jeweils ein Diagramm):(b) In einem Membranst�u k seien ein, zwei oder drei Kan�ale ge�o�net. Im o�enenZustand haben die Kan�ale alle die glei he konstante Leitf�ahigkeit von jeweils g.Ihr Glei hgewi htspotential sei bei 0 mV (3 Kurven; linke Abbildung). Bea htenSie: Die Leitf�ahigkeit von parallel ges halteten Kan�alen addiert si h.( ) Zwei Ionenkan�ale haben die glei he Leitf�ahigkeit g aber unters hiedli he Glei h-gewi htspotentiale. Der erste Kanal hat ein negatives Glei hgewi htspotentialE1 = �1 (z.B. das von Kalium EK), der zweite ein positives E2 = 1 (z.B. dasvon Natrium ENa) (2 Kurven; re hte Abbildung).

A.3. AUFGABEN ZU KAPITEL 3 293−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Spannung V
Str
om I
ein Kanalzwei Kanäledrei Kanäle
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Spannung V
Str
om I
E1 = −1
E2 = 1Abbildung A.8: Die F�alle mit konstanter Leitf�ahigkeit(d) Die beiden Kan�ale aus (b) haben nun eine spannungsabh�angige Leitf�ahigkeit:Unterhalb einer Spannung Vg (E1 < Vg = �0:5 < E2) sei die Leitf�ahigkeitbeider Kan�ale klein, dar�uber �andert sie si h sprunghaft auf einen gr�o�erenWert, d.h. ab der Spannung Vg �o�nen si h die Kan�ale. In Neuronen spielensol he Kan�ale eine wi htige Rolle bei der Erzeugung von Aktionspotentialen(au h Spikes genannt). Das sind pulsartige Entladungen mit denen die Neuronemiteinander kommunizieren (2 Kurven; linke Abbildung).(e) Nun soll si h die Leitf�ahigkeit der beiden Kan�ale ni ht sprunghaft sondernallm�ahli h �andern. Au�erdem soll si h die Leitf�ahigkeit einmal bei niedriger(Vg = �0:66; 1a, 2a) und einmal bei etwas h�oherer (Vg = �0:33; 1b, 2b) Span-nung �andern (4 Kurven; re hte Abbildung).
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Spannung V
Str
om I
E1 = −1
E2 = 1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Spannung V
Str
om I
1a1b2a2bAbbildung A.9: Die F�alle mit spannungsabh�angiger Leitf�ahigkeitA.3 Aufgaben zu Kapitel 31. (Binomis he Formeln) Formen Sie mit Hilfe der binomis hen Formeln um undvereinfa hen Sie wenn m�ogli h!

294 ANHANG A. L �OSUNGEN DER AUFGABEN(a) (x+ 2)2 = x2 + 4x+ 4(b) (2x� 3)2 = 4x2 � 12x+ 9( ) (�z + 4)2 = z2 � 8z + 16(d) (�x� 2)2 = x2 + 4x+ 4(e) y2 � 4 = (y + 2)(y � 2)(f) y2 + 4y + 4 = (y + 2)2(g) 4z2 � 12z + 9 = (2z � 3)2(h) (y � 3)(y + 3) = y2 � 9(i) x2 + 6x+ 9x+ 3 = (x+ 3)2x+ 3 = x+ 3(j) y2 � 8x+ 16y � 4 = (y � 4)2y � 4 = y � 4(k) (z + 2)2z2 � 4 = (z + 2)2(z + 2)(z � 2) = z + 2z � 22. (Potenzgesetze) Vereinfa hen Sie folgende Ausdr�u ke:(a) x2x5 = x7(b) (x3xx2)2 = (x3+1+2)2 = (x6)2 = x12( ) y5x2yy4 = y6x2y4 = x2y2 = (xy)2(d) x� 12pxy = pxpypx = py(e) xy�2z6z�4y2x = z10y4(f) �x 13 y� 13x2�3 = (x 73 )3 � (y� 13 )3 = x7y�1 = x7y(g) yxax�a = y � xa � xa = yx2a(h) pxyz2x� 12 y 12 = x 12 � x 12 � y 12 � y� 12 � z 22 = xjzj Bemerkung: Wegen z2 = (�z)2 istpz2 = jzj .3. (Exponentialfunktion, Logarithmus) Vereinfa hen Sie folgende Ausdr�u ke:(a) F�ur x > 0 gilt: log(x2x5) = log(x7) = 7 log(x)(b) F�ur x > 0 gilt: 2 ln(px) = ln(px2) = ln(x)( ) log(x) � log(xy) = log� xxy� = log�1y� = � log(y)(d) 2x5x = (2 � 5)x = 10x(e) exeye�x = ex+y�x = ey(f) F�ur a > 0 und a 6= 1 gilt: loga(ax) = x loga(a) = x � 1 = x(g) 10log10(x2) = x2(h) e�(x2�4x)e�4 = e�(x2�4x+4) = e�(x�2)2(i) log� x2y�2�� 2 log(x) = log(x2 � y2)� logx2 = log(x2) + log(y2)� log(x2) =log(y2) = 2 log(y)4. (Skalengesetze in der Biologie)

A.3. AUFGABEN ZU KAPITEL 3 295Die Ausk�uhlung (=W�armeverlust) eines Lebewesens ist proportional zu seiner Ober- �a he multipliziert mit dem Temperaturunters hied zwis hen Innen und Au�en. DieW�armeproduktion ist aber proportional zu seinem Volumen. (Wie sollten si h prin-zipiell W�armeproduktion und W�armeverlust eines Tieres zueinander verhalten?)Was hat dies f�ur die Gr�o�e von S�augetieren in den k�alteren Regionen im Verglei hzu denen in den w�armeren zur Folge?W�armeverlust: �W� � O ��T ! �W� = 1 �O ��TW�armeproduktion: �W+ � V ! �W+ = 2 � VIm Glei hgewi ht sollte �W��W+ = 1 gelten ! O��TV = 2 1 .Weil O � r2 und V � r3 , r \Radius" des Tieres ! 3r2�T 4r3 = 1 , �T = � r mit = 4 3 = onst.Das heisst mit zunehmender Temperaturdi�erenz zwis hen Innen und Au�en solltendie Tiere gr�o�er werden, also erwarten wir in Polargebieten gr�o�ere Tiere als in denTropen (Bergmann's he Regel).Dur h Vergr�o�erung der Ober �a he bei glei hem Volumen wird der W�armeverlusterh�oht. Die geringsten Verluste bei gegebenem Volumen hat die Kugelform. EineReduktion von K�orperausw�u hsen zur Verringerung des W�armeverlustes �ndet manim Tierrei h entspre hend der Allen's hen Regel.5. (Biomasse von B�aumen)Wir wollen die Abh�angigkeit der Masse eines Baumes von der Di hte der Bep an-zung untersu hen. Die Baumdi hte % ist dabei de�niert als die Anzahl der B�aumeauf einer bestimmten Boden �a he. Empiris h l�asst si h nun feststellen, dass dasVerh�altnis L der Blatt �a he aller B�aume zur Boden �a he in etwa konstant ist.(�Uberlegen Sie si h, warum das so ist!),L = Gesamtblatt .Boden . = mittl. Blatt . eines B.� Zahl der B�aumeBoden �a he = �% = onst.Wir wollen nun annehmen, dass die mittlere Blatt �a he � eines Baumes proportio-nal zum Quadrat seiner H�ohe h, das mittlere Gewi ht w hingegen proportional zurdritten Potenz der Baumh�ohe ist. Wie verh�alt si h dann das mittlere Gewi ht weines Baumes als Funktion der Baumdi hte %? Diskutieren Sie Ihr Ergebnis!Annahmen: I � � h2 ! � = a � h2II w =� h3 ! w = b � h3Gesu ht: w(%)Da � � % = ah2% = L ! h = ( La% ) 12! in II: w = b( La% ) 32 � %� 32 w = w0(%0% ) 32Die nat�urli he Skala f�ur die Baumdi hte ist hier %0 = La pro F�a heneinheit undw0 ist das mittlere Gewi ht f�ur % = %0 F�ur % > %0 wird w < w0 ; f�ur % <%0 wird w > w0 mit einer Divergenz f�ur % ! 0.

296 ANHANG A. L �OSUNGEN DER AUFGABEN
0
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 3
w/w0
rho/rho0Abbildung A.10: Baummasse versus Bep anzungsdi hte6. (Gewi ht von S hlangen)Bei der Untersu hung der S hlangenart Heterodon nasi us (S hlangenart in Kansas,USA) stellt man fest, dass ihr Gewi ht w proportional zur dritten Potenz ihrer L�angel ist, w = al3 und a = 500g=m3. Tragen Sie diese Abh�angigkeit in einer doppelt-logarithmis hen Abbildung auf. (Auf der x-A hse gilt also x = log(l) und auf dery-A hse y = log(w), wobei l in Metern und w in Gramm gemessen wird.) Wel heKurve erhalten Sie? F�ur eine andere S hlangenart gelte w = bl2 mit b = 200g=m2.Wie ver�andert si h Ihr Ergebnis?Eine weitere S hlangenart gen�ugt der Beziehung w = al3+300g. Auf wel he S hwie-rigkeiten sto�en sie nun? Wie lassen si h diese umgehen?L�osung:1. Fall: w1(l) = al3 () log(w1(l)) = 3 log(l) + log(a) . 2. Fall: w2(l) = bl2 ()log(w2(l)) = 2 log(l)+log(b) . 3. Fall: w3(l) = al3+ () log(w3(l)) = log(al3+ ) .Die S hwierigkeit im 3.Fall besteht darin, dass log(al3+ ) auf Grund der Summe imArgument des Logarithmus ni ht wie in den anderen F�allen dargestellt werden kann.Erst na h Umformung auf w3(l) � = al3 () log(w3(l) � ) = 3 log(l) + log(a)kann der 3. auf den 1. Fall zur�u kgef�uhrt werden.7. (Logarithmus) Zeigen Sie dur h geeignetes Logarithmieren bzw. Exponentieren:(a) loga x = logb x � loga b a; b; x 2 R+nf1gWegen � log(x) = log(x ) ist logb(x) � loga(b) = loga(blogb(x)) = loga(x)(b) loga(b) = 1logb(a) a; b 2 R+nf1gloga(b) = 1logb(a), loga(b) � logb(a) = 1, logb(aloga(b)) = 1, logb(b) = 1

A.3. AUFGABEN ZU KAPITEL 3 2970 0.5 1 1.5 2
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Länge (m)
Gew
icht
(g)
w1
w2
w3
0.1 0.2 0.4 0.6 0.8 1 1.5 210
−1
100
101
102
103
Länge (m)
Gew
icht
(g)
w1
w2Abbildung A.11: S hlangengewi ht versus -l�ange; linear (links) und doppeltlogarith-mis h (re hts)wahr f�ur alle a; b > 0 a; b 6= 1alternativ: W�ahle x = a in (a)( ) ln 10 = 1log10 eFall (b) mit a = e und b = 10, da ln = loge(d) ax = b x ) = logb(a); a; b > 0ax = b x) logb(ax) = logb(b x), x � logb(a) = � x � logb(b) = � x, = logb(a) x 6= 08. (Radioaktiver Zerfall) Radioaktive Sto�e zerfallen unter Aussendung von Strah-lung in andere Sto�e. Sei x(t) die Menge der no h ni ht zerfallenen Atome zumZeitpunkt t und x0 die Anzahl der zum Zeitpunkt t = 0 unzerfallenen Atome. Danngilt x(t) = x0e��t ;wobei � die Zerfallsrate ist (Zerf�alle pro Zeit).(a) Skizzieren Sie x(t) f�ur t � 0 einmal f�ur eine gro�e und einmal f�ur eine kleineZerfallsrate �. (siehe Abbildung A.12)(b) Na h wel her Zeit ist genau die H�alfte des urspr�ungli h vorhandenen Sto�eszerfallen (\Halbwertszeit")?x(t 12 ) = x02 x02 = x0e��t 12, 12 = e��t 12, ln 12 = ��t 12, ln 2� = t 12

298 ANHANG A. L �OSUNGEN DER AUFGABEN
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
t
x(t)
= e
−λ
t
λ = 1λ = 3
Abbildung A.12: Zum radioaktiven Zerfall9. (Binomis her Satz) S hreiben Sie mit Hilfe des Binomis hen Satzes die Funktionf(x) = (2 + x)4 als Polynom in x. Werten Sie dieses Polynom in linearer N�aherungf�ur x = 0:01 aus und verglei hen Sie Ihr Ergebnis mit dem exakten Resultat 2:014 =16:32240801 !Binomis her Satz: (a+ b)n =Pnk=0 �nk�an�kbkHier:(2 + x)4 = 4Xk=0�40�24�kxk= �40�24 � x0 +�41�23 � x1 +�42�22 � x2 +�43�21 � x3 +�44�20 � x4= 1 � 16 � 1 + 4 � 8 � x+ 6 � 4 � x2 + 4 � 2 � x3 + 1 � 1 � x4= 16 + 32x+ 24x2 + 8x3 + x4in linearer N�aherung gilt: (2 + x)4 = 16 + 32xf�ur x = 0:01 also 2:014 � 16:32Das ist bereits eine gute N�aherung, da das exakte Ergebnis 2:014 = 16:32240801betr�agt.10. (Beispiel aus der �Okologie)Ein wi htiges Charakteristikum eines Lebensraumes ist dessen Artendiversit�at. DieDiversit�at ist umso gr�o�er, je mehr vers hiedene Arten dort anzutre�en sind undje glei hm�a�iger die Individuen si h auf diese Arten verteilen. Der Shannon IndexHS ist ein aus der Informationstheorie stammendes Ma� f�ur die Diversit�at einerBioz�onose, das genau diese beiden Eigens haften besitzt:HS = � NXi=1 pi log2 pi pi = niM M = NXi=1 niN ist die Anzahl der gefundenen Arten, ni sind deren Individuenzahlen, M ist dieAnzahl der insgesamt gefundenen Individuen. Die Wahrs heinli hkeit bzw. relativeH�au�gkeit, ein Individuum der Art i anzutre�en ist pi.

A.3. AUFGABEN ZU KAPITEL 3 299(a) Wel he Werte kann pi (allgemein eine beliebige Wahrs heinli hkeit) annehmen?Wel hen Wert nimmt p1 an wenn die Art 1 sehr dominierend ist, d.h. von dieserArt kommen sehr viele Individuen vor, w�ahrend von allen anderen Arten nurEinzeltiere gefunden werden. Wie gro� ist dann pi f�ur die �ubrigen Arten?Maximaler Wert f�ur pi ist 1, denn falls alle Tiere nur von einer Art sind, istn1 = M und somit p1 = MM = 1. Minimaler Wert f�ur pi ist 0, falls von einerArt keine Individuen gefunden werden. Im allgemeinen ist 0 � pi � 1 f�ur alle i.(b) Wel hen Wert hat NPi=1 pi, d.h. wie gro� ist die Wahrs heinli hkeit eine beliebigeArt anzutre�en? NXi=1 pi = NXi=1 niM = 1M NXi=1 ni = 1M �M = 1d.h. die Wahrs heinli hkeit, eine beliebige Art anzutre�en, ist 1.( ) Skizzieren Sie die Funktionen f(pi) = � log2 pi, g(pi) = pi und h(pi) = f(pi) �g(pi) = �pi log2 pi f�ur pi 2 [0; 1℄! Wel hen Funktionswert hat h(1)? Wel henFunktionswert hat h(0)? Re hnen sie dazu eventuell einige Werte f�ur kleine pi(z.B. 0.1, 0.01, 0.001) mit dem Tas henre hner aus.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
pi
f, g,
h
f gfg
Abbildung A.13: zum Shannonindex(d) An wel her Stelle pi s hneidet h(pi) die Winkelhalbierende g(pi)? KorrigierenSie eventuell ihre Skizze von h(pi)!h(pi) = g(pi), pi = �pi log2 pi, pi = 0 oder log2(pi) = �1, pi = 12 oder pi = 0(e) Wel he Werte haben p1 und HS , wenn nur eine einzige Art gefunden wurde?N = 1; M = n1 ) p1 = MM = 1 und HS = �P1i=1 pi log2 pi = �1 � 0 = 0

300 ANHANG A. L �OSUNGEN DER AUFGABEN(f) Zeigen Sie, dass zur einfa heren Bere hnung der Shannon-Index auf folgendeForm gebra ht werden kann:HS = lnM � 1M NXi=1 ni lnni! = ln 2HS = � NXi=1 pi log2 pi= � 1ln(2) NXi=1 niM ln( niM )= � 1ln(2) NXi=1 niM (ln(ni)� ln(M))= � 1ln(2) 1M NXi=1 ni ln(ni)� 1M NXi=1 ni ln(M)!= � 1ln(2) 1M NXi=1 ni ln(ni)� ln(M)!= ln(M)� 1M NXi=1 ni ln(ni)! = ln(2)(g) In folgender Tabelle sind die Anzahl der Individuen ni aller Makroinvertebratenaufgelistet, die in zwei Abs hnitten P1 und P2 der Plane, einem Ba h im HohenFl�aming (Brandenburg), gefunden wurden:Art P1 P2 Art P1 P2Dugesia ono ephala 9 15 Heptagenia sulphurea 3 34An ylus uviatilis 2 7 Paraleptophlebia spe . 0 4Pisidium spe . 15 43 Perlodes dispar 0 3Erpobdella o to ulata 0 8 Protonemoura spe . 19 0Glossiphonia omplanata 6 10 Ore to hilus villosus 0 5Gammarus pulex 36 120 Halesus radiatus 0 2Gammarus roeseli 0 440 Hydropsy he pellu idula 15 0Baetis spe . 27 20 Hydropsy he spe . 2 20Ephemera dani a 0 120 Rya ophila fas iata 2 0In wel hem Abs hnitt ist die Diversit�at gr�o�er?Es ergeben si h folgende relative H�au�gkeiten pi:Art P1 P2 Art P1 P2Dugesia ono ephala 9136 15851 Heptagenia sulphurea 3136 34851An ylus uviatilis 2136 7851 Paraleptophlebia spe . 0 4851Pisidium spe . 15136 43851 Perlodes dispar 0 3851Erpobdella o to ulata 0 8851 Protonemoura spe . 19136 0Glossiphonia omplanata 6136 10851 Ore to hilus villosus 0 5851Gammarus pulex 36136 120851 Halesus radiatus 0 2851Gammarus roeseli 0 440851 Hydropsy he pellu idula 15136 0Baetis spe . 27136 20851 Hydropsy he spe . 2136 20851Ephemera dani a 0 120851 Rya ophila fas iata 2136 0Damit ergibt si h H1S = 2:9168 und H2S = 2:3741, d. h. obwohl in Abs hnitt2 mehr Tiere und Arten gefunden werden, ist die Diversit�at na h Shannon in

A.3. AUFGABEN ZU KAPITEL 3 301Abs hnitt 1 gr�o�er. Der Grund liegt in der Dominanz von Gammarus roeseli,Gammarus pulex und Ephemera dani a in Abs hnitt 2.(h) Bei einer festen Artenzahl N wird der Shannon-Index HS am gr�o�ten, wennalle Arten glei h h�au�g vorkommen, d.h. ni = nj f�ur alle i; j. Wie gro� sinddann die ni und die pi bei einer gegebenen Individuenzahl M? Wie gro� istdaf�ur der Shannon-Index HS?Gegeben: N und M fest; ni = nj f�ur alle i; jGesu ht: ni; pi; HSAus M =PNi=0 ni folgt f�ur ni = nj = n f�ur alle i; jM = NXi=1 n = n NXi=1 1 = n �Nalso n = MN ) pi = niM = nM = MNM = 1N = pi f�ur alle iHS = � NXi=1 pi log2 pi = � NXi=1 1N log2( 1N )= � 1N log2( 1N ) NXi=1 1 = 1N log2( 1N )N= � log2( 1N ) = log2(N)Das Ergebnis ist unabh�angig von der Anzahl der Tiere, ents heidend ist dieAnzahl der Arten und dass es von jeder Art glei h viele Individuen gibt.11. (Logarithmus) Bere hnen Sie log3 7 und log7 3 ! Formen Sie dazu die Ausdr�u kegeeignet um und benutzen Sie dann Ihren Tas henre hner!log3(7) = log10(7)log10(3) = ln(7)ln(3) = 1:7712log7(3) = 1log3(7) = 0:5646 und allgemein:logy(x) = loga(x)loga(y)12. (Binomis her Satz) Bere hnen Sie 2:15 mit dem Tas henre hner! Bere hnenSie mit dem Binomis hen Satz ohne Tas henre hner die lineare und quadratis heN�aherung von 2:15 und verglei hen Sie das Ergebnis mit dem exakten Resultat!F�uhren Sie dann die glei hen Re hnungen f�ur 1:95 dur h!2:15 = (2 + 0:1)5= �50�25 � 0:10 +�51�24 � 0:11 +�52�23 � 0:12 +�53�22 � 0:13 +�54�21 � 0:14 +�55�20 � 0:15= 1 � 32 � 1 + 5 � 16 � 0:1 + 10 � 8 � 0:01 + 10 � 4 � 0:001+5 � 2 � 0:0001+ 1 � 1 � 0:00001= 40:84101

302 ANHANG A. L �OSUNGEN DER AUFGABENlineare N�aherung: 2:15 � �50�25 � 0:10 +�51�24 � 0:11= 1 � 32 � 1 + 5 � 16 � 0:1= 40quadratis he N�aherung:2:15 � �50�25 � 0:10 +�51�24 � 0:11 +�52�23 � 0:12= 1 � 32 � 1 + 5 � 16 � 0:1 + 10 � 8 � 0:01= 40:81:95 = (2� 0:1)5= �50�25 � (�0:1)0 +�51�24 � (�0:1)1 +�52�23 � (�0:1)2 +�53�22 � (�0:1)3 +�54�21 � (�0:1)4 +�55�20 � (�0:1)5= 1 � 32 � 1 + 5 � 16 � (�0:1) + 10 � 8 � 0:01 +10 � 4 � (�0:001) + 5 � 2 � 0:0001 + 1 � 1 � (�0:00001)= 24:76099lineare N�aherung, wie oben: 24quadratis he N�aherung: 24.813. (Skalengesetze in der Biologie) Das Gewi ht G eines Tieres ist proportionalzu seinem Volumen V : G � V (Zusatzaufgabe: wel he physikalis hen Gesetze fal-len Ihnen dazu ein? Wie lautet dann also der Proportionalit�atsfaktor?). Der Dru kp, der auf jedem einzelnen der n F�u�e mit der Auftritts �a he A lastet, ist danngegeben dur h p = GnA . Warum haben also kleine Tiere (z.B. Katzen) relativ zurK�orpergr�o�e kleinere F�u�e als gro�e Tiere (z.B. Elefanten)?Gewi ht G = g � � � V , da G = m � g und m = � � VDa V wie r3 skaliert, vera htfa ht si h beispielsweise der Dru k auf den F�u�enbei Verdoppelung der K�orpergr�o�e. Ober �a hen skalieren dagegen nur wie r2 beiVer�anderung der K�orpergr�o�e. Deshalb muss die Auftritts �a he �uberproportionalansteigen, um dem wa hsenden Dru k bei Vergr�o�erung des Tieres standzuhalten.14. (Beispiel aus der Neurobiologie) Zur Partner�ndung setzen Heus hre ken ih-ren Gesang ein. Wenn der Gesang von einem paarungsbereiten Ges hle htspartnererkannt wird, bewegt si h dieser auf den S�anger zu. Es wurden nun die Antwortei-gens haften vers hiedener Neurone des auditoris hen Systems in Abh�angigkeit vonder Umgebungstemperatur untersu ht, um zu sehen, wie si h die Temperatur auf dieEigens haften der neuronalen Verarbeitung des Gesangs nieders hl�agt. Die meistenNeurone antworten bei h�oheren Temperaturen viel st�arker auf einen Reiz als beiniedrigen Temperaturen. Um diese Temperaturabh�angigkeit zu quanti�zieren, wirdaus den Daten der Q10-Wert bere hnet. Dieser gibt an, um wel hen Faktor si h eineGr�o�e �andert, wenn die Temperatur um 10ÆC erh�oht wird. Beispielsweise bedeutetein Q10-Wert von 2, da� si h die Me�gr�o�e bei einer Erh�ohung der Temperatur um10ÆC verdoppelt.

A.3. AUFGABEN ZU KAPITEL 3 303(a) Die Antwortst�arke x(10ÆC) des BGN1-Neurons bei einer Temperatur von T =10ÆC sei 1, der Q10-Wert 1.5 . Wel he Antwortst�arke x(T ) hat das Neuron beiT = 20, 30 und 40ÆC ? Fertigen Sie eine Skizze der Funktion x(T ) an!x(10ÆC) = 1; Q10 = 1:5 ! x(20ÆC) = Q10 � x(10ÆC) = 1:5 ! x(30ÆC) =Q10 � x(20ÆC) = 1:52 = 2:25 ! x(40ÆC) = Q10 � x(30ÆC) = 1:53 = 3:375
0 10 20 30 40 500
1
2
3
4
5
6
Temperatur (°C)
Ant
wor
tstä
rke
Abbildung A.14: Temperaturabh�angigkeit der neuronalen Antwortst�arke(b) Wie w�urde die Temperaturabh�angigkeit f�ur Q10 = 1 und Q10 = 0:5 aussehen?F�ur Q10 = 1 w�are x(T ) = konstant, also w�are x temperaturunabh�angig.F�ur Q10 = 12 w�urde x mit wa hsender Temperatur exponentiell abnehmen.( ) Wie Sie in ihrer Skizze sehen, w�a hst die Antwortst�arke x exponentiell mitder Temperatur T an. Was w�are eine geeignete Basis der Exponentialfunktion?Was steht in ihrem Exponenten? Wie sieht also die Funktion x(T ) aus?Bei jedem S hritt auf der x{A hse um 10ÆC vervielfa ht si h der Funktionswertum das 1.5-fa he, eine geignete Basis ist deshalb der Q10{Wert. Der Exponentp muss folgenden Bedingungen gere ht werden:bei 10ÆC : p = 0, bei 20ÆC : p = 1, bei 30ÆC : p = 2, bei 40ÆC : p = 3) p = T�10ÆC10ÆC = T�T0T0 mit T0 = 10ÆCx(T ) = QT�T0T010(d) Wird die Antwortst�arke x bei zwei vers hiedenen Temperaturen T gemessen,kann daraus der Q10-Wert bere hnet werden. Sei x1 = x(T1) die Antwort zurTemperatur T1 und x2 = x(T2) die Antwort zur Temperatur T2. Zeigen Sie,dass daraus Q10 na h folgender Formel bere hnet werden kann:Q10 = �x2x1� 10ÆCT2�T1Mit x1 = x(T1) = QT1�T0T010 und x2 = x(T2) = QT2�T0T010 folgtx1x2 = QT1�T0T010QT2�T0T010

304 ANHANG A. L �OSUNGEN DER AUFGABEN, x1x2 = QT1�T0T0 �T2�T0T010, x1x2 = QT1�T2T010, Q10 = �x1x2� T0T1�T2, Q10 = �x2x1� T0T2�T1(e) In untenstehender Tabelle sind die Antwortst�arken zweier vers hiedener Neu-ronentypen bei jeweils zwei Temperaturen angegeben. Wel hes der beiden Neu-rone zeigt eine st�arkere Temperaturabh�angigkeit in seinem Antwortverhalten?Neuron T1=ÆC x1 T2=ÆC x2UGN2 23 170 32 280AN4 21 210 31 260F�ur UGN2: x1 = x(23ÆC) = 170 und x2 = x(32ÆC) = 280Q10 = �280170� 10ÆC32ÆC�23ÆC = �2817� 109 = 1:7410F�ur AN4: x1 = x(21ÆC) = 210 und x2 = x(31ÆC) = 260Q10 = �260210� 10ÆC31ÆC�21ÆC = �2621�1 = 1:2381UGN2 zeigt also eine st�arkere Temperaturabh�angigkeit als AN4, daQ10(UGN1) >Q10(AN4).A.4 Aufgaben zu Kapitel 41. (Folgen) Die Masse einer Bakterienpopulation an in der n-ten Generation seigegeben dur h an = n� 2n� 1 : (1.8)(a) Wie gro� ist die Masse der Bakterien an+1 in der darauf folgenden Generationn+ 1 ?an = n� 2n� 1 = 1� 1n� 1 ; n 2 Nnf1gan+1 = n+ 1� 2n+ 1� 1 = n� 1n = 1� 1n(b) Wird die Population wa hsen, d.h. ist die Folge an monoton wa hsend?Frage: an+1 � an? ) 1� 1n � 1� 1n� 1, 1n � 1n�1, n � n� 1

A.4. AUFGABEN ZU KAPITEL 4 305Wahre Aussage f�ur alle n 2 Nnf1g ) die Folge w�a hst monoton. Da au hn > n� 1 gilt, ist die Folge sogar streng monoton.( ) Gibt es eine maximale Masse der Bakterienpopulation, d.h. ist die Folge be-s hr�ankt?Da der Z�ahler immer kleiner als der Nenner ist, ist die Folge na h oben dur h1 bes hr�ankt. Na h unten ist sie dur h ihr erstes Glied a2 = 0 bes hr�ankt, dasie monoton w�a hst. Daraus folgt die Bes hr�anktheit der Folge.(d) Eine allgemeine Version der Glei hung (1.8) w�arean = n� kn� q ; k; q 2 R : (1.9)Wie m�ussten k und q gew�ahlt werden, damit die Population w�a hst?Es muss gelten: an+1 � an f�ur an = n�kn�q = 1� k�qn�q1� k � qn+ 1� q � 1� k � qn� q, k � qn+ 1� q � k � qn� q, n+ 1k � q � qk � q � nk � q � qk � q, n+ 1k � q � nk � q, n+ 1 � n falls k � q > 0oder n+ 1 � n falls k � q < 0Ab n > q w�a hst die Folge monoton f�ur k � q, streng monoton f�ur k > q.Im Falle k = q kann zwar obige Umformung ni ht dur hgef�uhrt werden, daman ni ht dur h Null dividieren darf, aber man erkennt au h direkt aus derDe�nition der Folge, dass sie in diesem Falle konstant 1 ist.2. (Rekursive Folge) Eine Folge an sei gegeben dur h die Rekursionsvors hriftan+1 = 23an :(a) Bere hnen Sie die Folgenglieder a1 bis a4 mit a0 = 4 und tragen Sie diese inein Koordinatensystem ein! (siehe Abbildung A.15)n 1 2 3 4an 83 169 3227 6481(b) K�onnen Sie eine Formel f�ur das n-te Folgenglied an angeben, wenn ein beliebigesa0 gegeben ist?F�ur beliebiges a0 ist a1 = 23a0; a2 = 23a1 = � 23�2 a0; a3 = 23a2 = � 23�3 a0 et .Allgemein ist an = �23�n a0

306 ANHANG A. L �OSUNGEN DER AUFGABEN
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
n
a n
Abbildung A.15: Die ersten vier Glieder der Folge an( ) Zeigen Sie, dass die Folge an streng monoton fallend ist!an+1 < an, an+1 � an < 0, 23an � an < 0, �23 � 1�an < 0, ��13� an < 0, an > 0, 23na0 > 0 wegen (b), a0 > 0Wenn also f�ur alle n 2 N an > 0 ist, f�allt die Folge streng monoton. Es istan > 0 f�ur alle n genau dann, wenn a0 > 0. Falls a0 < 0 ist an < 0 f�ur allen 2 N, d.h. die Folge w�a hst dann streng monoton. F�ur a0 = 0 ist die Folgekonstant 0.(d) Ist an na h unten bes hr�ankt? Ist die Folge konvergent?1. Fall: Wenn a0 > 0 sind alle an > 0, die Folge ist also na h unten dur h 0bes hr�ankt. Da sie zudem monoton f�allt, ist sie au h konvergent.2. Fall: F�ur a0 = 0 gilt f�ur alle n 2 N an = 0, d.h. die Folge ist bes hr�ankt undkonvergiert gegen 0.3. Fall: F�ur a0 < 0 gilt f�ur alle n 2 N an < 0, d.h. die Folge ist na h obenbes hr�ankt. Au�erdem ist sie monoton wa hsend und damit konvergent.(e) Wel hen Grenzwert hat die Folge an?limn!1 an = limn!1 ��23�n a0�= a0 � limn!1�23�n= 0 (Skript 5.1, Bsp. 4)

A.5. AUFGABEN ZU KAPITEL 5 3073. (Monotonie von Folgen) Wel he der Folgen sind monoton wa hsend, wel hemonoton fallend, wel he zeigen strenge Monotonie? Begr�unden Sie ihre Antwortmathematis h!(a) an = 1 ! an+1 = an ! monoton wa hsend und fallend, da konstant,aber weder streng monoton wa hsend, no h streng monoton fallend.(b) xt = �12�t ! xt+1 = �12�t+1 = 12xt ! 8 t 2 N ist xt+1 < xt, d.h.xt ist streng monoton fallend.( ) ym = ��12�m = (�1)m�12�m ! Aufgrund des (�1)m alterniert dieFolge, sie ist also weder monoton wa hsend no h fallend.(d) �n+1 = 2 � �n (�0 = 1) ! Da �n+1 = 2�n > �n; �0 > 0 ist �n strengmonoton wa hsend. Alternativ kann man erkennen, dass �n = 2n ist, und weil2n+1 = 2n �2 > 2n ist, folgt ebenfalls das streng monotone Wa hstum der Folge�n .(e) zn = n+ 1n n 1 2 3 4 5zn 2 2 12 3 13 4 14 5 15Verda ht: zn+1 > znBeweis: zn+1 > zn, n+ 1 + 1n+ 1 > n+ 1n, 1 > 1n � 1n+1, 1 > 1n(n+1), 1 > 1n2+n, n2 + n > 1 (da n2 + n positiv ist)Weil n 2 N gilt, ist n mindestens 1 und somit n2 + n > 1 f�ur alle n 2 N.A.5 Aufgaben zu Kapitel 51. (Grenzwerte von Folgen) Bere hnen Sie die Grenzwerte folgender Folgen:(a) an = 1n limn!1 1n = 0 (Skript 5.1, Bsp. 1)(b) xn = n+ 1n� 1 limn!1�n+ 1n� 1� = limn!1�n(1 + 1n )n(1� 1n )�

308 ANHANG A. L �OSUNGEN DER AUFGABEN= limn!1�1 + 1n1� 1n �= 1 + limn!1 1n1� limn!1 1n= 1 + 01� 0= 1( ) yt = t2 � 5t+ 103t� 2limt!1 t2 � 5t+ 103t� 2 = limt!1� t23t� 2 + �5t3t� 2 + 103t� 2�= limt!1� t3� 2t + �53� 2t + 1t � 103t� 2�= limt!1 t3� 2 limt!1 1t + �53� 2 limt!1 1t + limt!1 1t � 103� 2 limt!1 1t= 13 � 53 + 0 � 103 =1Allgemein gilt: Der Betrag des Grenzwertes eines Quotienten zweier Polynome istunendli h, wenn der Grad des Z�ahlers gr�o�er ist als der des Nenners, er ist 0, fallsder Grad des Z�ahlers kleiner ist als der des Nenners, und glei h dem Quotienten derKoeÆzienten der Variablen des h�o hsten Grades, falls Z�ahler und Nenner Polynomeglei hen Grades sind. Zusammen:limn!1 anpbnq =8>>><>>>: 1 : p > qab : p = q0 : p < q2. (Grenzwerte von Reihen) Bestimmen Sie die Grenzwerte folgender Reihen! Neh-men Sie dazu au h das Skript zur Hilfe.(a) sm = mXi=1 1i . Gesu ht: limm!1 sm = 1Xi=1 1i1Xi=1 1i = 1 + 12 + 13 + 14 + 15 + 16 + 17 + 18 :::> 1 + 12 + 14 + 14| {z }= 12 + 18 + 18 + 18 + 18| {z }= 12 +:::= 1 + 12 + 12 + 12 + :::Da die Reihe unendli h viele Terme enth�alt, l�asst si h die obige Abs h�atzungbeliebig oft wiederholen, d.h. die Reihe divergiert.limn!1 sm =1

A.5. AUFGABEN ZU KAPITEL 5 309(b) qm = mX�=1 13� : Mit der Summenformel f�ur die geometris he Reihe istlimm!1 mX�=1 13� = limm!1 mX�=0�13�� � 1= 1� limm!1( 13 )m+123 � 1= 32 � 1= 123. (Grenzwerte von Folgen) Wel hen Grenzwert besitzen die einzelnen Folgen? Sindsie bes hr�ankt? Begr�unden Sie ihre Antwort mathematis h!(a) an = 500 ) limn!1 an = 500, die Folge ist also bes hr�ankt, da sie konstant ist.(b) bn = n2 � 104n3 + n2 � 100 bn = n2 � 104n3 + n2 � 100= n2(1� 10n2 )n2(4n+ 1� 100n2 )= 1� 10n24n+ 1� 100n2) limn!1 bn = 1� limn!1 10n2limn!1(4n) + 1� limn!1 100n2= 1� 01+ 1� 0= 0Die Folge ist konvergent, also au h bes hr�ankt.( ) n = 6n10 � n43n10 + n n = 6n10 � n43n10 + n= n10(6� 1n6 )n10(3 + 1n9 )= 6� 1n63 + 1n9) limn!1 n = 6� limn!1 1n63� limn!1 1n9= 6 + 03 + 0= 2Au h diese Folge ist bes hr�ankt, da konvergent.

310 ANHANG A. L �OSUNGEN DER AUFGABEN(d) yn+1 = �12 � yn ) yn = ��12�n y0limn!1 yn = limn!1 ���12�n y0�= y0 limn!1��12�n= y0 � 0= 0 f�ur alle y0 2 RDie Folge ist wieder bes hr�ankt, da konvergent.4. (Geometris he Reihe) Wenn die Erd�olvorr�ate bei konstantem gegenw�artigenJahresverbrau h no h f�ur 30 Jahre ausrei hen, um wieviel Prozent m�usste si h dannvon Jahr zu Jahr der Verbrau h reduzieren, damit sie f�ur immer ausrei hen w�urden?Sei x0 der derzeitige Verbrau h, xn der Verbrau h im n-ten Jahr von heute angez�ahlt, dann istM = 30x0 der gesamte Erd�olvorrat. Der Verbrau h verringere si hnun von Jahr zu Jahr um p Prozent:xn+1 = xn � p100xn= �1� p100�xnMit q = �1� p100� < 1 ist alsoxn+1 = qxn ; x0 = M30 > 0) xn = qnx0, damit betr�agt der kumulative Verbrau h Vn in den n�a hsten nJahren: Vn = nXk=0 xk= x0 + x1 + x2 + : : :+ xn= x0(1 + q + q2 + : : :+ qn)= x0 �1� qn+11� q �F�ur n)1 ist limn!1 Vn = 1Xk=0xk= limn!1�x0 1� qn+11� q �= x0 11� q ; da 0 < q < 1Dieser Gesamtverbrau h darf ni ht gr�o�er sein als die heutigen Erd�olvorr�ate, damitdiese f�ur immer ausrei hen: V �M, x0 11� q � 30 � x0

A.6. AUFGABEN ZU KAPITEL 6 311, 1 � 30� 30q da x0 > 0 und q < 1, 30q � 29, q � 2930, 1� p100 � 2930, � p100 � �1 + 2930, p100 � 1� 2930, p � 10030 = 313Der Erd�olverbrau h m�usste also jedes Jahr erneut um mindestens 3 13 Prozent verrin-gert werden, damit die heute bekannten Reserven beliebig lange ausrei hen w�urden.In letzter Konsequenz bedeutet dies nat�urli h, dass irgendwann praktis h gar kein�Ol mehr verbrau ht werden darf.A.6 Aufgaben zu Kapitel 61. (Lineare Iterierte Abbildung) Untersu hen Sie das folgende Populationsmodell,das explizit auf Geburts- und Sterbeprozesse eingeht: Die mittlere Geburtenratepro Kopf und Generationszeit sei �, die Sterberate �. Daraus ergibt si h folgendeDynamik der Bev�olkerungsgr�o�e xt:xt+1 = xt + �xt � �xt : (1.10)(a) Wof�ur stehen die einzelnen Terme auf der re hten Seite von (1.10)? Wel heWerte d�urfen die Parameter � und � annehmen, damit das Modell biologis hsinnvoll ist?xt+1 = xt +Geburtenratez}|{� xt � �|{z}SterberateBev�olkerungsgr�o�ez}|{xt�xt: Zahl der Geburten in der Zeit zwis hen t und t+ 1�xt: Zahl der Sterbef�alle in der Zeit zwis hen t und t+ 1Damit Geburten zu einer Bev�olkerungszunahme und Sterbef�alle zu einer Bev�olke-rungsabnahme f�uhren, muss � > 0 und � > 0 sein. Damit die Anzahl dersterbenden Bev�olkerung ni ht die der Gesamtbev�olkerung �ubers hreitet, muss� � 1 + � sein.(b) Geben Sie Bedingungen an die Parameter � und � an, unter denen die Bev�olke-rungsgr�o�e xt (i) w�a hst, (ii) konstant bleibt und (iii) ausstirbt. Was bedeutetWa hsen und Aussterben im Kontext der Monotonie von Folgen?xt+1 = xt + �xt � �xt = (1 + �� �)xt = � xtmit = 1 + �� � .Zunahme: ) xt+1 > xt , �xt > xt , > 1 , 1+��� > 1 , � > � ,wenn also die Geburtenrate gr�o�er als die Sterberate ist.Konstanz: ) xt+1 = xt;, �xt = xt , = 1 , 1+��� = 1 , � = � ,d.h. Geburten- und Sterberate sind glei h gro�.

312 ANHANG A. L �OSUNGEN DER AUFGABENAbnahme: ) xt+1 < xt;, �xt < xt , < 1 , 1+��� < 1 , � < � ,die Geburtenrate ist kleiner als die Sterberate.Eine Zunahme bedeutet in diesem Fall streng monotones Wa hstum der Folge,eine Abnahme streng monotones Fallen der Folge.( ) Wie entwi kelt si h die Bev�olkerung f�ur beliebige Zeiten t, wenn sie zur ZeitNull dur h x0 gegeben ist? Wel he L�osung hat also die Iterierte Abbildung(1.10)?xt+1 = � xt mit x0 f�uhrt auf die Folge xt = t � x0xt = (1 + �� �)t � x0ist die L�osung von xt+1 = xt + �xt � �xt.2. (Beispiel aus der Medizin) Ein Patient erh�alt t�agli h ein Medikament mit einerfesten Dosis von d mg (Milligram) und s heidet pro Tag p Prozent der im K�orperangesammelten Medikamentenmenge wieder aus.(a) Ma hen Sie si h klar, warum f�ur die Medikamentenmenge xn+1 im K�orper desPatienten am n+ 1-ten Tag giltxn+1 = qxn + d (1.11)wobei xn die Medikamentenmenge am n-ten Tag und q = 1� p=100 ist.xneu = xalt �Abnahme + Zufuhr, xn+1 = xn � (p Prozent von xn) + d, xn+1 = xn � p100xn + d, xn+1 = �1� p100�xn + d, xn+1 = qxn + d mit q = 1� p100(b) Warum muss in diesem Beispiel der Parameter q zwis hen Null und Eins liegenund der Parameter d positiv sein, um der biologis hen Realit�at zu entspre hen?Der K�orper s heidet ni hts oder eine positive Menge des Medikamentes aus,daher ist p � 0 und somit q � 1 . Auf der anderen Seite kann der K�orper ni htmehr auss heiden, als si h in ihm be�ndet, daher ist p � 100 und daher q � 0 .( ) Unter wel hen Bedingungen an d und q ist die Folge xn monoton wa hsendoder fallend? Ist sie streng monoton?wa hsend: xn+1 � xn, qxn + d � xn, (q � 1)xn � �d, xn � d1� q f�ur q 6= 1fallend, analoge Bere hnung: xn � d1� q q 6= 1

A.6. AUFGABEN ZU KAPITEL 6 313F�ur xn = d1�q ist xn wa hsend und fallend, also konstant (q 6= 1)Ist xn irgendwann, z.B. am Anfang, kleiner als d1�q , dann sind au h alle fol-genden xn kleiner als d1�q und die Folge ist streng monoton wa hsend f�ur alled 2 R+ und q 2 (0; 1).Ist xn irgendwann gr�o�er als d1�q , dann ist die Folge streng monoton fallendf�ur alle d 2 R+ und q 2 (0; 1).Der Sonderfall q = 0 (alles wird ausges hieden) f�uhrt auf die konstante Folgexn = d f�ur alle n 2 N.Der Sonderfall q = 1 (ni hts wird ausges hieden) f�uhrt auf xn = x0 + n � d.Diese Folge ist streng monoton wa hsend und ni ht bes hr�ankt f�ur d > 0.(d) Wel he Funktion f hat die entspre hende Iterierte Abbildung xn+1 = f(xn)?Da xn+1 = qxn + d = f(xn) ist f(x) = qx+ d.(e) Skizzieren Sie den Graph von f ! Zei hnen Sie zus�atzli h die Winkelhalbierendeein! (siehe Abbildung A.16)
0 1 2 3 4 50
1
2
3
4
5q = 1/2; d = 1
x
f(x)
= x
/2 +
1
Abbildung A.16: f(x) = qx + d f�ur q = 1=2 und d = 1 zusammen mit der Winkel-halbierenden(f) Besitzt diese Iterierte Abbildung Fixpunkte? Wenn ja: Wie h�angt ihre Gr�o�evon d und q ab? Was bedeutet das Errei hen eines Fixpunktes f�ur die Medika-mentenmenge?Fixpunktbedingung: f(x�) = x�, qx� + d = x�, x� = d1� q q 6= 1d.h. falls q 6= 1 ist, gibt es einen Fixpunkt bei d1�q = x�, und falls q = 1 ist, gibtes keinen Fixpunkt (da d > 0). Das Errei hen eines Fixpunktes bedeutet hier,dass si h die Medikamentenmenge im K�orper mit der Zeit ni ht mehr �andert,sondern konstant bleibt.

314 ANHANG A. L �OSUNGEN DER AUFGABEN(g) Wel he Zeitentwi klung erwarten Sie f�ur lange Zeiten? Diskutieren Sie dieseFrage qualitativ mit Hilfe der bisherigen Ergebnisse. Was bedeutet dies f�ur denlangfristigen Medikamentenlevel im K�orper?Sei zun�a hst 0 < q < 1:Aus ( ) folgt dann: F�ur x0 < x� ist xn streng monoton wa hsend, aber dur hx� na h oben bes hr�ankt, d.h. xn n�ahert si h von unten an den Fixpunkt an.F�ur x0 = x� xn = x� f�ur alle n 2 N.In allen diesen F�allen wird si h also ein konstanter Medikamentenlevel bei x� =d1�q einstellen.F�ur den Spezialfall q = 1 ist xn = x0 + n � d, d.h. die Medikamentenmenge imK�orper wird beliebig gro� mit wa hsender Zeit.

A.6. AUFGABEN ZU KAPITEL 6 3153. (Beispiel aus der Fis hereibiologie I) In einem gro�en Fis htei h lebt seit l�angererZeit eine stabile Population von etwa 9000 Pl�otzen (Rutilus rutilus). Davon sind6.2% fortp anzungsf�ahig und es gibt genauso viele M�ann hen wie Weib hen. Jedesder ges hle htsreifen Weib hen legt im S hnitt 10 000 Eier pro Jahr ab. Davonerleben nur 0.2% das n�a hste Jahr. Von den Tieren, die das erste Jahr �uberlebthaben, gehen jedes Jahr 50% zugrunde1.Wir wollen aus diesen Angaben ein Modell f�ur die Populationsgr�o�e der Pl�otzenma hen. Da Pl�otzen nur einmal im Jahr lai hen, bietet es si h an, mit einer linearenIterierten Abbildung als einfa hstes Modell f�ur die Anzahl der Pl�otzen xn im Jahrn zu beginnen. Um dieses aus obigen Angaben zu entwi keln, beantworten Sie bittefolgende Fragen:(a) Wieviele der aus den 10 000 Eiern eines Weib hens ges hl�upften Jung�s heleben no h im darau�olgenden Jahr?Es leben no h 0.2% von 10000, das sind 0:002 � 10000 = 20(b) Wel her Bru hteil der Gesamtpopulation ist �uberhaupt in der Lage Eier zulegen?6.2% sind ges hle htsreif, davon sind die H�alfte Weib hen, also sind 3.1% inder Lage, Eier zu legen.( ) Wie gro� ist dann die Geburtenrate � (Anzahl der Na hkommen pro Tier undJahr)? Ber�u ksi htigen Sie das Ergebnis aus (a)!Da 3.1% der Population je 20 Na hkommen hervorbringen ist � = 20 � 3:1% =62% = 0:62(d) Wie gro� ist die Sterberate � (Anzahl der toten Tiere pro Tier und Jahr)?� = 50% = 0:5(e) Geben Sie nun die Formel einer homogenen linearen Iterierten Abbildung f�ur dieAnzahl der Pl�otzen xn+1 = f(xn) = rxn im n�a hsten Jahr n+1 in Abh�angigkeitder Populationsgr�o�e xn im Jahr n an! Wie gro� ist also der Parameter r ?xn+1 = rxn= (1 + �� �)xn= (1 + 0:62� 0:5)xn= 1:12xn) r = 1:12(f) Skizzieren sie den Graph der Funktion f(x)!Siehe den linken Teil der Abbildung A.17.(g) Geben Sie die explizite L�osung (xn)n 2 N der linearen Iterierten Abbildungxn+1 = f(xn) f�ur beliebige Anfangspopulationen x0 > 0 an und skizzieren Sieden typis hen L�osungsverlauf! (siehe Abbildung A.17 re hts)Aus xn+1 = rxn ) xn = rn � x0; n 2 N(h) Wie wird si h die Population na h dieser Formel im Laufe der Zeit entwi keln?Warum ma ht das biologis h keinen Sinn?limn!1xn = limn!1 rnx0 = x0 limn!1 rn =1 ; da r > 1 :) die Population wird beliebig gro�, was Mangels unendli her Resour en(Platz, Futter, et .) nat�urli h ni ht realistis h sein kann.180% davon werden von Fre�feinden erbeutet, 18% verhungern, 1.999% werden geangelt undnur 0.001% sterben eines nat�urli hen Todes

316 ANHANG A. L �OSUNGEN DER AUFGABEN0 1 2 3 4 5
0
1
2
3
4
5
x
f(x)
= 1
.12
x
0 5 10 15 200
2
4
6
8
10
n
x n/x0
Abbildung A.17: Links: f(x) gegen x mit Winkelhalbierender; Re hts: die ersten 20Glieder der Folge xn4. (Beispiel aus der Fis hereibiologie II) In einem �ahnli hen Tei h wie in der vorhe-rigen Aufgabe wird wesentli h intensiver geangelt. Dadur h gehen jedes Jahr zus�atz-li h 20% der Pl�otzenpopulation verloren.(a) Wie gro� ist in diesem Tei h die Sterberate �?� = �alt + 20% = 0:5 + 0:2 = 0:7(b) Wie wird si h unter diesen Bedingungen und unter Verwendung des linea-ren Modells aus der vorherigen Aufgabe die Pl�otzenpopulation langfristig ent-wi keln? Skizzieren sie wiederum den Graphen der Abbildung f(x) und diePopulationsgr�o�e xn f�ur x0 = 9000 und n = 1; 2; : : : ; 5 (siehe Abbildung A.18).xn+1 = (1 + �� �)xn= (1 + 0:62� 0:7)xn= 0:92xn= rxn) jrj < 1 ) limn!1xn = limn!1 rnx0 = x0 limn!1 rn = 0, die Population wirdaussterben.( ) Um den Fis hbestand zu si hern, werden jedes Jahr d Pl�otzen aus einer Zu htin den Tei h eingesetzt. Wie lautet nun die entspre hende lineare Iterierte Ab-0 1 2 3 4 5
0
1
2
3
4
5
x
f(x)
= 0
.92
x
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
n
x n/x0
Abbildung A.18: Links: f(x) gegen x mit Winkelhalbierender; Re hts: die ersten 20Glieder der Folge xn

A.6. AUFGABEN ZU KAPITEL 6 317bildung? Fertigen Sie eine Skizze des Graphen der entspre henden Funktionf(x) an und zei hnen Sie zus�atzli h die Winkelhalbierende ein!Mit konstanter Zufuhr d istxn+1 = rxn + d= (1 + �� �)xn + d= fneu(xn)(d) Wo liegt der Fixpunkt der Abbildung aus Teilaufgabe ( )?Der Fixpunkt liegt bei x� = f(x�), x� = rx� + d, x� = d1� rHier gilt: x� = 11� 0:92d= 12:5d(e) Wieviele Fis he m�ussten jedes Jahr dur h Neubesatz dem Tei h hinzugef�ugtwerden (wie gro� muss also d sein), um die Population stabil auf 9000 Tiere zuhalten? x� = 12:5d, 9000 = 12:5d, d = 720(f) Wie lautet die allgemeine L�osung der Iterierten Abbildung aus Teilaufgabe ( )und (e)? Wie entwi kelt si h die Population, wenn na h einem besonders hartenWinter nur x0 = 1000 Tiere �uberlebt haben? Skizzieren Sie diese L�osung!Ablauf der Folge:x0 7! rx0 + d 7! r(rx0 + d) + d = r2x0 + rd+ d 7! r[r(rx0 + d) + d℄ + d =r3x0 + r2d+ rd+ d 7! : : :Allgemein: xn = rnx0 + d(1 + r + r2 + : : :+ rn�1)= rnx0 + d � 1� rn1� r (1.12)= d1� r| {z }x� � d1� r| {z }x� rn + rnx0= x� � (x� � x0)rn (1.13)Langfristig wird si h immer der Fixpunkt einstellen, dalimn!1xn = limn!1(rnx0 + d1� rn1� r )= x0 � limn!1 rn| {z }= 0 , da jrj<1+d1� limn!1 rn1� r= d1� r= x�

318 ANHANG A. L �OSUNGEN DER AUFGABENSpeziell f�ur x0 = 1000; d = 720; r = 0:92; x� = 9000 ist na h Glei hung(1.12): x1 = 0:92 � 1000 + 7201� r1� r= 920 + 720= 1640x2 = (0:92)2 � 1000 + 7201� 0:9221� 0:92= 846 + 720 � 1:92= 2228und so weiter. Na h Formel (1.13):x1 = 9000� (9000� 1000) � 0:92= 1640x2 = 9000� (9000� 1000) � 0:922= 2228Die Form (1.13) der L�osung ist am besten interpretierbar:xn = (Fixpunkt)�(anf�angli he Abwei hung vom Fixpunkt)�rn = x��(x��x0)�rnDa rn f�ur jrj < 1 mit wa hsendem n immer kleiner wird, erkennt man, dassdie Population si h auf den Fixpunkt hinentwi kelt und dass die anf�angli heAbwei hung (x� � x0) immer weniger zu xn beitr�agt.0 10 20 30 40 50
0
10
20
30
40
50
x
f(x)
= 0
.92
x
0 5 10 15 20 25 300
2
4
6
8
10
n
x n/x0
x*/x0
Abbildung A.19: Links: f(x) gegen x mit Winkelhalbierender; Re hts: die Entwi k-lung der Folge na h der St�orung5. (Lineare Iterierte Abbildung) Wir betra hten eine inhomogene lineare IterierteAbbildung vom Typ xt+1 = axt + b ; x0 2 R+ (1.14)(siehe z.B. die Medikamentenaufgabe 2, die Pl�otzenaufgabe 3 oder die Holzaufgabenim Skript).(a) Wie lautet die entspre hende homogene Iterierte Abbildung?

A.7. AUFGABEN ZU KAPITEL 7 319Die zugeordnete homogene iterierte Abbildung istxt+1 = axt; x0 2 R+ohne die Inhomogenit�at b.(b) Wel he allgemeine L�osung hat die homogene Iterierte Abbildung?xhomt = at � x0; x0 2 R+; t 2 N( ) Bere hnen Sie die Fixpunkte der inhomogenen Iterierten Abbildung!Fixpunktbedingung: x� = f(x�)hier: x� = ax� + b, x� = b1�a ; a 6= 1F�ur a = 1 ist die Bedingung nur f�ur b = 0 erf�ullbar.(d) Geben Sie eine spezielle L�osung der inhomogenen Iterierten Abbildung an!Eine spezielle L�osung ist z.B. die Fixpunktl�osung, d.h.xspt = x�= b1� a; t 2 N; a 6= 1(e) Wie lautet die allgemeine L�osung der inhomogenen Iterierten Abbildung?Die allgemeine L�osung lautetxallgt = � xhomt + xspt= � at + b1� a; t 2 N; a 6= 1Die allgemeine L�osung ist unabh�angig von x0, enth�alt aber einen freien Para-meter (hier ), der dur h x0 festgelegt wird.(f) Bere hnen Sie die L�osung der inhomogenen Iterierten Abbildung f�ur den An-fangswert x0. xallg0 = x0, � a0 + b1�a = x0, = x0 � b1�a = x0 � x�Die spezielle L�osung der inhomogenen Glei hung zum Anfangswert x0 lautetalso xt = (x0 � x�)at + x� = x� � (x� � x0)at; t 2 N :A.7 Aufgaben zu Kapitel 71. (Beispiel aus der Fis hereibiologie III) In der Aufgabe 3 des vorherigen Ka-pitels haben Sie gesehen, dass die lineare Iterierte Abbildung als Modell f�ur diePopulationsgr�o�e der Pl�otzen ni ht die tats�a hli he Situation einer stabilen Popula-tionsgr�o�e bes hreibt. Ein Modell, das die Probleme bei zu gro�en Individuenzahlenber�u ksi htigt, ist die Logistis he Abbildung xn+1 = rxn(1� xn=C). Zus�atzli h zudem linearen Modell xn+1 = rxn kommt hier also no h der Faktor 1 � xn=C miteinem weiteren Parameter C hinzu. Der Parameter r wurde bereits in der Aufgabe3 zuvor bere hnet und ist glei h 1.12 .

320 ANHANG A. L �OSUNGEN DER AUFGABEN(a) Bere hnen sie f�ur beliebige r 2 (0; 4℄ und C > 0 die Fixpunkte der logistis henAbbildung!Fixpunkte von xn+1 = f(xn) = rxn(1� xnC ) ergeben si h aus f(x�) = x� )x� = rx�(1� x�C ), x� = 0 oder 1 = r(1� x�C ), x� = 0 oder x�C = r�1r, x� = 0 oder x� = C � Cr = C �1� 1r �(b) Wie gro� muss der Parameter C sein, damit die logistis he Abbildung f�ur denspeziellen Wert von r = 1:12 eine stabile Population vom 9000 Tieren repro-duziert?Damit f�ur r = 1:12 ein Fixpunkt entsteht, mussC = rx�r � 1= 1:12 � 90001:12� 1= 84000 = 8:4 � 104gew�ahlt werden.( ) Es sei nun r = 3:2, C = 1 und x0 = 0:8. Bere hnen Sie die ersten se hs Werteder logistis hen Abbildung und tragen sie diese in ein A hsenkreuz ein. Wasf�allt ihnen auf? xn+1 = 3:2 � xn(1� xn) mit x0 = 0:8n 0 1 2 3 4 5 6xn 0.8 0.512 0.8 0.512 0.8 0.512 0.8
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
n
x n
Abbildung A.20: Die L�osung oszilliert.

A.8. AUFGABEN ZU KAPITEL 8 321A.8 Aufgaben zu Kapitel 81. (Grenzwerte) Gegeben ist die Funktionf(x) = 8<: 2; f�ur x = 31; f�ur x 6= 3(a) Wel hen Funktionswert hat f(x) an der Stelle x = 3 ?f(3) = 2(b) Skizzieren Sie den Graphen der Funktion f(x) !
1 2 3 4 50
0.5
1
1.5
2
2.5
x
f(x)
Abbildung A.21: Graph der Funktion f(x)( ) Wel hen Grenzwert hat f(x) f�ur x! 3 ? (wie lauten der re hts- und der links-seitige Grenzwert?)Linksseitiger Grenzwert: limx!3� f(x) = 1 (links von 3 (f�ur alle x < 3) ist f(x) =1 ) au h der Grenzwert ist 1)Re htsseitiger Grenzwert: limx!3+ f(x) = 1 (analog f�ur x > 3)) da limx!3� f(x) = limx!3+ f(x) ist limx!3 f(x) existent und glei h 1.Da f(3) = 2 6= limx!3 f(x) ist die Funktion an der Stelle x = 3 ni ht stetig.2. (Grenzwerte) Gegeben ist die Funktiong(x) = 1x� 2 + 1(a) Wie geht diese Funktion aus der Hyperbel h(x) = 1=x hervor?Die Funktion g(x) geht aus h(x) = 1x dur h Translation um 2 Einheiten inx-Ri htung und eine Einheit in y-Ri htung hervor.(b) Skizzieren Sie den Graphen der Funktion g(x) ! (siehe Abbildung A.22)

322 ANHANG A. L �OSUNGEN DER AUFGABEN−1 0 1 2 3 4 5
−10
−5
0
5
x
g(x)
Abbildung A.22: Graph der Funktion g(x)( ) Wie lauten der linksseitige und der re htsseitige Grenzwert limx!2� g(x) undlimx!2+ g(x) ?limx!2� g(x) = �1 und limx!2+ g(x) = +1(d) Existiert limx!2 g(x), limx!1 g(x) ?Aus ( ) folgt, dass limx!2 g(x) ni ht existiert.limx!1 g(x) = g(1) = 03. (Funktionen) Die beiden Hyperbelfunktionen sinh(x) (lies: sinus hyperbo-li us) und osh(x) (lies: osinus hyperboli us) sind de�niert alssinh(x) = ex � e�x2 und osh(x) = ex + e�x2(a) Wel hen Funktionswert haben sinh(x) und osh(x) an der Stelle x = 0?sinh(0) = e0 � e�02 = 1� 12 = 0 osh(0) = e0 + e�02 = 1 + 12 = 1(b) Wel he Grenzwerte haben die beiden Funktionen f�ur x! �1?limx!1 sinh(x) = 12 � limx!1 ex � limx!1 e�x�= 12(1� 0)= 1

A.8. AUFGABEN ZU KAPITEL 8 323limx!�1 sinh(x) = 12 � limx!�1 ex � limx!�1 e�x�= 12(0�1)= �1limx!1 osh(x) = 12 � limx!1 ex + limx!1 e�x�= 12(1+ 0)= 1limx!�1 osh(x) = 12 � limx!�1 ex + limx!�1 e�x�= 12(0 +1)= 1( ) Wel he Art von Symmetrie zeigen diese Funktionen?sinh(x) ist punktsymmetris h bez�ugli h (0; 0) . Man nennt diese Eigens haftau h ungerade. Dies folgt aussinh(�x) = e�x � e�(�x)2= e�x � ex2= �ex � e�x2= � sinh(x) osh(x) ist a hsensymmetris h bez�ugli h der y{A hse. Man nennt dies au hgerade. Beweis: osh(�x) = e�x + e�(�x)2= e�x + ex2= ex + e�x2= osh(x)−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
sinh(x)cosh(x)
−4 −3 −2 −1 0 1 2 3 4
−30
−20
−10
0
10
20
30
x
f(x)
sinh(x)cosh(x)Abbildung A.23: sinh und osh; Bea hte die unters hiedli he Skalierung der x{A hse

324 ANHANG A. L �OSUNGEN DER AUFGABEN(d) Skizzieren Sie die Graphen der beiden Funktionen!4. (Grenzwerte) �Uberpr�ufen Sie ob die folgende Grenzwerte existieren und bere h-nen Sie gegebenenfalls ihre Werte:(a) limx!0 2x2 = 0(b) limx!1 1(x�1)3 existiert ni ht, dalimx!1+ 1(x�1)3 = +1 6= limx!1� 1(x�1)3 = �1( ) limx!1 2x4 + 5x3x7 = 2 limx!1 1x3 + 5 limx!1 1x4= 2 � 0 + 5 � 0(d) limx!�1 8x21 + 2x13 � 20x34x21 � x4 = limx!�1�x21x21 � 8 + 2x8 � 20x184� 1x17 �= 84 = 2(e) limx!0 8x21 + 2x13 � 20x34x21 � x4 = limx!0�x3x3 � 8x18 + 2x10 � 20x(4x17 � 1) �= limx!0 x3x3 � limx!0(8x18 + 2x10 � 20)limx!0(4x17 � 1) � limx!0 1x= 1 � �20�1 � limx!0 1x| {z }existiert ni htDer Grenzwert existiert ni ht. Es handelt si h um eine Polstelle wie bei 1x , d.h.mit Vorzei henwe hsel undlimx!0+ 1x = +1 und limx!0� 1x = �1(f) limx!x0 x2 � x20x� x0 = limx!x0 (x� x0)(x+ x0)x� x0 (3. binomis he Formel)= limx!x0(x+ x0)= 2x0A.9 Aufgaben zu Kapitel 91. (Ableitung) Bestimmen Sie die maximalen De�nitionsgebiete M der folgendenFunktionen und bere hnen Sie die Ableitungen f�ur alle x 2 M . Hinweis: f�ur dieAbleitung der Exponentialfunktion gilt ddxex = ex.

A.9. AUFGABEN ZU KAPITEL 9 325(a) f(x) = x2 � 7x5 ; M = Rf 0(x) = 2x� 35x4(b) f(x) = 2x3=2 + ax�4 ; M = R+(+ wegen der Wurzel in x 32 und ohne die 0 wegen ax4 )f 0(x) = 2 � 32 � x 32�1 + a � (�4)x�5 = 3px� 4ax5( ) f(x) = 12x2 + 23x3 � 4x ; M = Rn �0;�23p3�| {z }Nullstellendes NennersAbleitung mittels Quotientenregel: �uv �0 = u0v � uv0v2Hier mit u(x) = 12x2 + 2 ) u0(x) = x und v(x) = 3x3 � 4x ) v0(x) =9x2 � 4) f 0(x) = x � (3x3 � 4x)� ( 12x2 + 2)(9x2 � 4)(3x3 � 4x)2Dies kann umgeformt werden zu:f 0(x) = x3x3 � 4x � ( 12x2 + 2)(9x2 � 4)(3x3 � 4x)2= 13x2 � 4 � 92x4 + 16x2 � 89x6 � 24x4 + 16x2oder f 0(x) = 3x4 � 4x2 � 92x4 � 16x2 + 8(3x3 � 4x)2= � 32x4 � 20x2 + 89x6 � 24x4 + 16x2(d) f(x) = exx� b ; M = Rnfbgf 0(x) = ex(x� b)� ex � 1(x� b)2= exx� b� 1(x� b)2= ex� 1x� b � 1(x� b)2�Allgemein gilt f�ur Funktionen der Form f(x) = g(x) � exf 0(x) = g(x) � ex + g0(x)ex (Produktregel und (ex)0 = ex)= ex(g(x) + g0(x))(e) f(x) =px2 + 1 ; M = RDie Funktion ist von der Form f(x) = g(h(x))mit h(x) = x2 + 1 und g(y) = py . Mit der Kettenregel ergibt si h dannf 0(x) = 12px2 + 1 � 2x= xpx2 + 1

326 ANHANG A. L �OSUNGEN DER AUFGABEN(f) f(x) = (1� x4)�5 ; M = Rn�� 4r 1 �| {z }Nullstellenvon 1� x4f 0(x) = (�5) � (1� x4)�6 � (�4 x3)= 20 x3(1� x4)6(g) f(x) = e�3x2 ; M = R f 0(x) = (�6x) � e�3x2(h) f(x) = eex ; M = R f 0(x) = ex � eex= ex+exAllgemein gilt f�ur Funktionen der Form f(x) = eg(x) : f 0(x) = g0(x)eg(x)(i) f(x) =px2 + 1� x ; M = Rf 0(x) = xpx2 + 1 � vgl. Aufg. (e)(j) f(x) = ek(x�x0) + 4px ; M = R+0 (wegen der Wurzel)f 0(x) = kek(x�x0) + 2px; x 6= 0 , f(x) ist bei 0 ni ht di�erenzierbar(k) f(x) = x2 � e�3x ; M = Rf 0(x) = (2x)e�3x + x2 � e�3x � (�3) (Produktregel und Kettenregel)= e�3x(2x� 3x2)Allgemein gilt f�ur Funktionen der Form f(x) = g(x) � eh(x) :f 0(x) = eh(x)(g0(x) + g(x) � h0(x))(l) f(x) = (7x2 � 4)6px2 + 1 ; M = RQuotientenregel mit u(x) = (7x2 � 4)6 ) u0(x) = 84x(7x2 � 4)5und v(x) = px2 + 1 ) v0(x) = xpx2+1f 0(x) = 84x(7x2 � 4)5px2 + 1� (7x2 � 4)6 � xpx2+1x2 + 1= 84x(7x2 � 4)5(x2 + 1)� (7x2 � 4)x(x2 + 1) 32= (7x2 � 4)5(x2 + 1) 32 �84x(x2 + 1)� (7x2 � 4)x�= 7x2 � 4)5(x2 + 1) 32 (77x3 + 88x)= (7x2 � 4)5(x2 + 1) 32 � 11x � (7x2 + 8)

A.9. AUFGABEN ZU KAPITEL 9 3272. (Verk�urzte Kurvendiskussion) Gegeben sind die beiden Funktionen:f(x) = x3 � 9x und g(x) = x4 � 5x2 + 4(a) Wie verhalten si h die Funktionen f�ur betragsm�a�ig sehr gro�e Werte von x ?limx!1 f(x) =1 , limx!�1 f(x) = �1 und limx!�1 g(x) =1(b) Bere hnen Sie die Nullstellen!Zur Bestimmung der Nullstellen werden die Funktionen umgeformt:f(x) = x3 � 9x= x(x2 � 9)= x(x + 3)(x� 3)g(x) = x4 � 5x2 + 4= (x2 � 4)(x2 � 1)= (x+ 2)(x� 2)(x+ 1)(x� 1)) Nullstellen von f(x) : x01 = 0; x02 = �3; x03 = 3) Nullstellen von g(x) : x01 = �2; x02 = 2; x03 = �1; x04 = 1( ) Wel he Symmetrien besitzen die Funktionen?f(x) ist ungerade, da f(�x) = (�x)3 � 9(�x)= �x3 + 9x= �(x3 � 9x)= �f(x)g(x) ist gerade, da g(�x) = (�x)4 � 5(�x)2 + 4= x4 � 5x2 + 4= g(x)(d) Bere hnen Sie die 1., 2., 3. und 4. Ableitung von f(x) und g(x) !f 0(x) = 3x2 � 9f 00(x) = 6xf 000(x) = 6f 0000(x) = 0 g0(x) = 4x3 � 10xg00(x) = 12x2 � 10g000(x) = 24xg0000(x) = 243. (Ableitung von Polynomen) Gegeben ist folgendes Polynom 4. Grades:p(x) = 4Xk=0 1k + 1xk

328 ANHANG A. L �OSUNGEN DER AUFGABEN−4 −3 −2 −1 0 1 2 3 4
−30
−20
−10
0
10
20
30
x
f(x)
, g(x
)
f(x)g(x)Abbildung A.24: f(x) = x3 � 9x und g(x) = x4 � 5x2 + 4(a) S hreiben Sie die Summe aus!p(x) = 1 + 12x+ 13x2 + 14x3 + 15x4(b) Wie lauten die lineare und die quadratis he N�aherung von p(x) ?lineare N�aherung: plin(x) = 1 + 12xquadratis he N�aherung: pquad(x) = 1 + 12x+ 13x2( ) Wie verh�alt si h p(x) f�ur betragsm�a�ig sehr gro�e Werte von x ?limx!�1 p(x) =1 (da die h�o hste Potenz x4 gerade ist)(d) Bere hnen Sie die Ableitung p0(x) = dp(x)=dx des Polynoms!p0(x) = 12 + 23x+ 34x2 + 45x3 oderp0(x) = 4Xk=1 kk + 1xk�1(e) Wie verh�alt si h die Ableitung p0(x) f�ur betragsm�a�ig sehr gro�e Werte von x ?limx!1 p0(x) =1; limx!�1 p0(x) = �1(f) Die Ableitung p0(x) ist wiederum ein Polynom. Wel hen Grad hat es?p0(x) ist ein Polynom dritten Grades (ein Grad niedriger als p(x))4. (Ableitung) Bestimmen Sie die maximalen De�nitionsgebiete M der folgendenFunktionen und bere hnen Sie die Ableitungen f�ur alle x 2M .(a) f(x) = xe�x2 ; M = Rf 0(x) = 1 � e�x2 + x � (�2x)e�x2= (1� 2x2)e�x2

A.9. AUFGABEN ZU KAPITEL 9 329(b) f(x) = (x � 1)e�(x�1)2 ; M = REntweder wie zuvor mit Produkt- und Kettenregel direkt bere hnen, oder manma ht die folgende Beoba htung: Mit y = x � 1 ) f(x) = g(y) = y � e�y2wie in (a)f 0(x) = ddy g(y) � ddx= (1� 2y2)e�y2 � ddx (x� 1)| {z }=1= (1� 2(x� 1)2)e�(x�1)2 (R�u ksubstitution)= (�2x2 + 4x� 1)e�(x�1)2( ) f(x) = 11 + e�x = (1 + e�x)�1 ; M = Rf 0(x) = (�1) � (1 + e�x)�2 � (�e�x)= e�x(1 + e�x)2(d) f(x) = ln(x) ; M = R+ f 0(x) = 1x(e) f(x) = log10(x) = ln(x)ln(10) ; M = R+f 0(x) = 1ln(10) � 1x(f) f(x) = x log2(x) = 1ln(2) � x � ln(x) ; M = R+f 0(x) = 1ln(2) �1 � ln(x) + x � 1x�= 1ln(2)(ln(x) + 1)= log2(x) + 1ln(2)(g) f(x) = xx ; M = R+Als Basis muss x > 0 sein, um einen beliebigen reelen Exponenten zu erlauben.F�ur die Bere hnung der Ableitung wird f(x) umgeformt:xx = eln(xx)= ex ln(x)f 0(x) = (ln(x) + 1)ex ln(x) (wie in (f))= (ln(x) + 1)xx(h) f(x) = ax2 + bx+ ; M = Rf 0(x) = 2ax+ b

330 ANHANG A. L �OSUNGEN DER AUFGABEN(i) f(x) = nXk=0 akxk ; ak 2 R ; M = Rf 0(x) = nXk=1 k � ak � xk�15. (Ableitung der Umkehrfunktion) Wir betra hten die Funktion f(x) = ln(x+1).(a) Wie geht f(x) aus der Funktion g(x) = ln(x) hervor?Die +1 im Argument entspri ht einer Vers hiebung der Funktion um�1 entlangder x-A hse.(b) Wel hen De�nitions- und wel hen Werteberei h hat f(x) ?D = fxjx 2 R und x > �1g , denn es muss x+ 1 > 0 gelten ; W = R( ) F�ur wel he x ist f umkehrbar? Bere hnen Sie die Umkehrfunktion f�1 von f !f ist f�ur alle x 2 D umkehrbar. Sei y = ln(x + 1)ey = x+ 1, x = ey � 1) f�1(x) = ex � 1(d) Skizzieren Sie die Graphen von f(x) und f�1(x) !−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
ex − 1ln(x + 1)Abbildung A.25: f(x) = ln(x + 1) und f�1(x) = ex � 1(e) Bere hnen Sie zuerst die Ableitung von f�1 und dann damit die Ableitung vonf(x) ! (f�1(x))0 = ex) (f(x))0 = 1e(ln(x+1)) = 1x+ 1

A.9. AUFGABEN ZU KAPITEL 9 3316. (Taylorentwi klung) Gegeben seien die Funktionen Cosinus hyperboli us undSinus hyperboli us: osh(x) = ex + e�x2 und sinh(x) = ex � e�x2(a) Bere hnen Sie die ersten vier Ableitungen der beiden Funktionen und versu- hen Sie diese jeweils dur h osh(x) oder sinh(x) auszudr�u ken! Geben Sie einekompakte Form der n-ten Ableitung osh(n) bzw. sinh(n) an! osh0(x) = �ex + e�x2 �0 = ex � e�x2 = sinh(x)sinh0(x) = �ex � e�x2 �0 = ex + e�x2 = osh(x)) osh00(x) = osh(x)) osh000(x) = sinh(x)) osh0000(x) = osh(x)und ) sinh00(x) = sinh(x)) sinh000(x) = osh(x)) sinh0000(x) = sinh(x)Allgemein gilt: [sinh(x)℄(n) = 8<: osh(x) ; n geradesinh(x) ; n ungerade[ osh(x)℄(n) = 8<: sinh(x) ; n gerade osh(x) ; n ungerade(b) Stellen Sie die Taylorreihen von osh(x) und sinh(x) f�ur x0 = 0 auf!Aus (a) folgt: [ osh(x)℄(n)x0=0 = 8<: 1 ; n gerade0 ; n ungeradeDamit in (9.49) aus dem Skript ) osh(x) = osh(0) + 1Xk=1 (x� 0)kk! � dkdxk osh(x)�����x0= 1 + 1Xn=1 x2n(2n)! (nur die Terme mit k = 2n tragen bei)= 1Xn=0 x2n(2n)!und f�ursinh(x) = sinh(0) + 1Xk=1 (x� 0)kk! � dkdxk sinh(x)�����x0= 0 + 1Xn=1 x2n�1(2n� 1)! (nur die Terme mit ungeradem k tragen bei)

332 ANHANG A. L �OSUNGEN DER AUFGABEN( ) Wie lauten die quadratis hen N�aherungen von osh(x) und sinh(x) an der Stellex = 0?quadratis he N�aherung: osh(x) = 1 + 12x2sinh(x) = xSkizzieren Sie die Graphen der N�aherungen zusammen mit denen der urspr�ung-li hen Funktionen f und g.−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−4
−3
−2
−1
0
1
2
3
4
x
f(x)
sinh(x)xcosh(x)1+x2/2Abbildung A.26: Die Funktionen sinh(x) und osh(x) zusammen mit ihren N�ahe-rungen(d) Wie h�angen diese mit der Taylorreihe der Exponentialfunktion zusammen?Bere hnen Sie dazu osh(x)+sinh(x) direkt und als Summe der entspre hendenTaylorreihen! osh(x) + sinh(x) = ex + e�x2 + ex � e�x2= ex2 + e�x2 + ex2 � e�x2= exTaylorreihen: osh(x) + sinh(x) = �1 + x22! + x44! + x66! + : : :�+�x11! + x33! + x55! + : : :�= x00! + x11! + x22! + x33! + : : := 1Xn=0 xnn!= exwobei x00! = 1 , da x0 = 1 und 0! = 1

A.9. AUFGABEN ZU KAPITEL 9 3337. (Gau�-Funktion) Die Gau�-Funktion ist de�niert alsfGau� = 1p2��2 exp�� x22�2�(a) Bere hnen Sie die erste und die zweite Ableitung der Gau�-Funktion f 0Gau� undf 00Gau�! f 0Gau� = 1p2��2 exp�� x22�2� � �� x�2�= 1p2� � 1j�3j � (�x) � exp�� x22�2�= � x�2 � fGau�f 00Gau� = � 1�2 � fGau� � x�2 � f 0Gau�= �� 1�2 + x2�4� � fGau�= 1�2 �x2�2 � 1� � fGau�= 1p2� 1j�3j �x2�2 � 1� exp�� x22�2�(b) Wie verhalten si h fGau�, f 0Gau� und f 00Gau� f�ur betragsm�a�ig sehr gro�e Wertevon x ? limx!�1 fGau� = 0limjxj!1 f 0Gau� = 0limx!�1 f 00Gau� = 0da die Exponentialfunktion s hneller als jede Potenzfunktion gegen Null geht.( ) Versu hen Sie fGau�(�x), f 0Gau�(�x) und f 00Gau�(�x) jeweils dur h fGau�(x),f 0Gau�(x) und f 00Gau�(x) auszudr�u ken. Was sagt das Ergebnis �uber die Symme-trieeigens haften der drei Funktionen aus?fGau�(�x) = fGau�(x) ) gerade, a hsensymmetris hf 0Gau�(�x) = � (�x)�2 fGau�(�x)= x�2 fGau�(x)= �f 0Gau�(x) ) ungerade, punktsymmetris h zum Ursprungf 00Gau�(�x) = f 00Gau�(x) da quadratis h in x ) a hsensymmetris h, gerade(d) Bere hnen Sie die Nullstellen der Gau�-Funktion und ihren beiden Ableitungen!Was bedeutet die Nullstelle von f 0Gau� f�ur fGau�? Was bedeuten die Nullstellenvon f 00Gau� f�ur f 0Gau�? Was bedeuten die Nullstellen von f 00Gau� f�ur fGau�? Wasbes hreibt also der Parameter � ?

334 ANHANG A. L �OSUNGEN DER AUFGABENDa ex 6= 0 f�ur alle x 2 R ) fGau�(x) 6= 0 f�ur alle x 2 R .f 0Gau�(x) = 0 , � x�2 fGau� = 0 , x = 0 da fGau� 6= 0 ) f 0Gau� hatbei x0 = 0 m�ogli herweise ein Extremum, und da f 00Gau�(0) = � 1p2��2�2 < 0handelt es si h tats�a hli h um ein Maximum.f 00Gau�(x) = 0, 1p2� 1j�3j �x2�2 � 1� e� x22�2 = 0, x2 = �2, x = � oder x = ��) f 0Gau� hat bei x = �� m�ogli herweise Extrema und fGau� hat bei x =�� tats�a hli h Wendepunkte, d.h. � ist ein Ma� f�ur die Breite des Bu kels der'Gau�glo ke'.(e) Bere hnen Sie die Funktionswerte an der Stelle x = 0 !fGau�(0) = 1p2��2f 0Gau�(0) = 0f 00Gau�(0) = � 1p2�j�3j(f) Skizzieren Sie die Graphen der drei Funktionen fGau�, f 0Gau� und f 00Gau�! Ber�u k-si htigen Sie dabei die Ergebnisse aus (b){(e), und dass die Funktionen dur hAbleiten auseinander hervorgehen.−4 −3 −2 −1 0 1 2 3 4
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
x
f(x)
fGaußf´
Gaußf´´
GaußAbbildung A.27: Die Gau�glo ke mit ihrer ersten und zweiten Ableitung8. (Fortsetzung von Funktionen) Die Funktion f sei f�ur x < 0 dur h g(x) = exgegeben. Sie soll dur h die Funktion h(x) = a+ bx f�ur x � 0 fortgesetzt werden.f(x) = 8<: g(x) = ex ; x < 0h(x) = a+ bx ; x � 0(a) Wie m�ussen a und b gew�ahlt werden, so dass g(0) = h(0) und g0(0) = h0(0) ?Es muss gelten: g(0) = h(0), 1 = a und g0(0) = h0(0), 1 = bd.h. f�ur a = b = 1 ist g0(0) = h0(0) und g(0) = h(0)

A.9. AUFGABEN ZU KAPITEL 9 335
−2 −1 0 1 20
0.5
1
1.5
2
2.5
3
x
f(x)
ex
1 + x
Abbildung A.28: Die Funktion f(x) gegen x(b) Skizzieren Sie den Graphen der Funktion f(x)!( ) Bere hnen Sie allgemein au h g00(x) und h00(x). Was gilt f�ur die zweite Ablei-tung der Funktion f an der Stelle x = 0 ?g00(x) = ex und h00(x) = 0 ) g00(0) = 1 und h00(0) = 0) Die zweite Ableitung ma ht einen Sprung an der Stelle x = 0(d) Es sei nun h(x) = 1Pk=0 akxk. Bestimmen Sie die Parameter ak so, dass alle Ab-leitungen von g(x) und h(x) an der Stelle x = 0 �ubereinstimmen. Wie lautetdann die Funktion f(x) ?! F�ur h(x) = 1Pk=0 akxk gilt h(n)(0) = an �n!, weil an der Stelle 0 nur der kon-stante Term beitr�agt. Der konstante Term der n-ten Ableitung ergibt si h aberaus dem Term anxn dur h n-fa hes Ableiten zu an �n � (n�1) : : : (n� (n�1)) =ann!) Weil (ex)(n) = ex und somit (ex)(n)j0 = 1 f�ur alle n 2 N m�ussen dieParameter an = 1n! gew�ahlt werden und damit istf(x) = 8<: ex ; x < 0P1k=0 xkk! ; x � 0 9=; = exDie Forderung der �Ubereinstimmung aller Ableitungen an einer bestimmtenStelle mit der Funktion ex f�uhrt auf die Potenzreihen-Darstellung von ex.9. (Beispiel aus der Neurobiologie) In der Netzhaut von Wirbeltieren be�ndet si hdirekt unter den Photorezeptoren ein Netzwerk von sogenannten Horizontalzellen.Wird die Retina mit einem Li htspalt der Breite 2d am Ort x = 0 beleu htet, ergibtein einfa hes Modell folgenden Verlauf der Membranspannung V (x) der Horizon-

336 ANHANG A. L �OSUNGEN DER AUFGABENtalzellen am Ort in x re htwinklig zum Spalt:V (x) = 8<: 1 exp�� jxj� �+E0 ; jxj > d 2 osh �x��+E1 ; jxj � dDarin ist E0 das Ruhepotential der Zellen im Dunkeln, E1 ist die Membranspan-nung, die si h einstellt, wenn die ganze Retina beleu htet wird, und � ist die L�angs-konstante, die bes hreibt, wie weit si h eine �Anderung der Membranspannung indem Horizontalzellennetzwerk ausbreitet. 1 und 2 sind zwei zun�a hst beliebigeKonstanten, die im Folgenden bestimmt werden sollen.(a) Wel he Membranspannung herrs ht in den Zellen, die weit vom Spalt entferntsind?Weit vom Spalt entfernt bedeutet jxj � d und im Grenzfalllimjxj!1V (x) = limjxj!1� 1e� jxj� +E0�= E0 da limjxj!1 e�jxj = 0(b) Wel he Symmetrie hat die Funktion f ?V (x) ist gerade, also a hsensymmetris h, dennV (�x) = 8<: 1e� j�xj� +E0 = 1e� jxj� +E0 2 osh ��x� �+E1 = 2 osh �x��+E1 9=; = V (x)( ) Bestimmen Sie die beiden Konstanten 1 und 2 so, dass f und f 0 stetig an denStellen x = d und x = �d ist!Aufgrund der Symmetrie gen�ugt es, V (x) nur f�ur positive x zu untersu hen.Sei also x � 0 V 0(x) =8<: � 1� e� jxj� ; x > d 2� sinh �x�� ; 0 � x � dDamit V (x) bei x = d stetig ist, muss geltenlimx!d� V (x) = limx!d+ V (x)= V (d)) 1e� d� +E0 = 2 osh� d��+E1 (1.15)Aus der Forderung na h der Stetigkeit von V 0(x) an der Stelle d folgt� 1� e� d� = 2� sinh� d�� (1.16)Das sind zwei Glei hungen f�ur die beiden Unbekannten 1 und 2 .Aus (1.16) ergibt si h 1 zu 1 = � 2 sinh�d�� e d� (1.17)und damit in (1.15)� 2 sinh�d��+E0 = 2 osh� d��+E1 (1.18)

A.9. AUFGABEN ZU KAPITEL 9 337, 2 �sinh� d��+ osh� d���| {z }= exp( d� ) = E0 �E1, 2 = (E0 �E1)e� d�) 1 = (E1 �E0) sinh� d��wobei im letzten S hritt 2 in (1.17) eingesetzt wurde.(d) Skizzieren Sie den Graph der Membranspannung V (x) .−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
x
V(x
)
λ = d = E1 = 1 und E
2 = −1
Abbildung A.29: Die Membranspannung V (x) als Funktion des Ortes x10. (Taylorentwi klung, Kurvendiskussion) Wir wollen zeigen, dass f�ur jxj � 1 dieN�aherung p1� x2 � 1� 12x2 gilt. Diese Abs h�atzung ist von zentraler Bedeutungf�ur die Diskussion von Sinus und Cosinus.(a) Entwi keln Sie dazu die Funktion f(x) = p1� x2 in eine Taylorreihe na h xum x0 = 0 und bre hen Sie die Entwi klung na h dem quadratis hen Term ab.f(x) = p1� x2; D = [�1; 1℄ � RDie Taylorreihe fTaylor(x) bis zum quadratis hen Term um x0 lautet allgemeinfTaylor(x) = f(x0) + f 0(x0)(x� x0) + 12f 00(x0)(x � x0)2Bildung der Ableitungenf 0(x) = �2x2p1� x2 = � xp1� x2f 00(x) = �p1� x2 � x�� xp1�x2�1� x2 = �1� x2 + x2(1� x2) 32 = �(1� x2)� 32

338 ANHANG A. L �OSUNGEN DER AUFGABEN) f(x) = f(0) + f 0(0) � x+ 12f 00(0)x2 + �ubrige Terme= 1 + 0 � x+ 12(�1)x2 + �ubrige Terme) f(x) � 1� 12x2 = fTaylor(x) f�ur jxj � 1(b) F�uhren Sie au h eine Kurvendiskussion der Funktion f(x) = p1� x2 undg(x) = 1� 12x2 dur h, um ein besseres Verst�andnis f�ur beide Funktionen unddamit au h f�ur die Grenzen der obigen Abs h�atzung zu erhalten. (De�nitions-berei h, Verhalten an den R�andern, Nullstellen, Funktionswert an der Stellex = 0, Symmetrie, Extrema, Skizze).Diskussion f(x) = p1� x2 g(x) = 1� 12x2Def.-Berei h D = [�1; 1℄ D = RAsymptotik f(�1) = 0 limx!�1 g(x) = �1Nullstellen x = �1 oder x = 1 x = �p2 oder x = p2Wert bei 0 f(0) = 1 g(0) = 1Extrema f 0(x) = 0) x = 0 g0(x) = �x = 0) x = 0f 00(0) = �1 < 0) Maximum g00(0) = �1 < 0) MaximumWendepunkte keine, weil f(x) bei 0 endet keine, weil g00(x) 6= 0 8 x 2 DSymmetrie gerade gerade−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−1.5
−1
−0.5
0
0.5
1
1.5
x
f(x)
, g(x
)
f(x)g(x)Abbildung A.30: Die Funktion f(x) = p1� x2 und ihre N�aherung g(x) = 1� 12x211. (Taylorreihe) Bere hnen Sie die ersten vier Ableitungen der Exponentialfunk-tion zur Basis a 2 R+, f(x) = ax, und geben Sie dann eine kompakte Formelf�ur die n-te Ableitung an. Ben�utzen Sie dieses Ergebnis um die Taylorreihe von axaufzustellen! Wie h�angt diese Reihe mit der Taylorreihe von ex zusammen?

A.9. AUFGABEN ZU KAPITEL 9 339Es gilt f(x) = ax = eln(a)x = ex ln(a)) f 0(x) = �ex�ln(a)� � ln(a) = (ln(a)) � ax = (ln(a)) � f(x)) f 00(x) = (f 0(x))0 = (ln(a)f(x))0 = ln(a) � f 0(x) = (ln(a))2f(x)) allgemein f (k)(x) = (ln(a))kf(x) = (ln(a))k � axTaylorreihe um x0f(x) = f(x0) + 1Xk=1 f (k)(x0)k! (x� x0)k (allgemein)= a0 + 1Xk=1 (ln(a))ka0k! xk (in diesem Fall)= 1 + 1Xk=1 (ln(a))kk! xkHier kann man nun genau die Taylorreihe der Exponentialfunktion erkennen:f(x) = 1 + 1Xk=1 (ln(a))kxkk!= 1 + 1Xk=1 1k! (ln(a)x)k= eln(a)�x12. (Kurvendiskussion) Diskutieren Sie die Funktion g(x) = os(ax2) mit x 2 Rund a 2 R+.(a) Wie lautet die erste und zweite Ableitung von g?g0(x) = �2ax � sin(ax2) (Kettenregel)g00(x) = �2a(1 � sin(ax2) + x � 2ax � os(ax2)) (Produkt- und Kettenregel)= �2a(sin(ax2) + 2ax2 os(ax2))(b) Wel hen Wert haben g(0), g0(0) und g00(0)?g(0) = os(0) = 1g0(0) = 0g00(0) = �2a(sin(0) + 2a � 0 � os(0)) = 0( ) Wie lautet die Taylor-Entwi klung von g um x0 = 0 bis eins hlie�li h des in xquadratis hen Terms?Taylorreihe um x0 = 0: g(x) = g(0) + 1Xk=1 gk(0)k! xkbis zum quadratis hen Term:gTaylor = 1 + 0 � x+ 12 � 0 � x2 = 1

340 ANHANG A. L �OSUNGEN DER AUFGABEN(d) Wie lautet die Tangentenglei hung an g im Punkt x0 = 0?Tangentenglei hung allgemein: y(x) = f(x0) + f 0(x0)(x � x0)Hier y(x) = 1 ist Tangente an g(x) im Punkt (0; 1)(horizontale/waagere hte Gerade; parallel zur x{A hse)(e) Ist g gerade beziehungsweise ungerade?g ist gerade, denn g(�x) = os(a(�x)2) = os(ax2) = g(x) .(f) Hat g Nullstellen? Wenn ja, wo liegen diese?g(x) = 0, os(ax2) = 0, ax2 = �2 + n� n 2 NEs werden nur die positiven Nullstellen des Cosinus ben�otigt, weilax2 � 0 f�ur alle a 2 R+ und x 2 R ist.) xNS = �r1a ��2 + n�� n 2 N(g) Wo liegen die Maxima und Minima von g?Wir wissen, dass der Cosinus Maxima bei 2k� und Minima bei (2k�1)� ; k 2 Zhat.) g(x) hat Maxima bei xmax = �r2n�a ; n 2 N0und Minima bei xmin = �r (2n� 1)�a ; n 2 NDie Funktionswerte sind g(xmax) = 1 und g(xmin) = �1−4 −3 −2 −1 0 1 2 3 4
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x
f(x)
cos(x2)cos(x2/2)
Abbildung A.31: Graph der Funktion g(x) = os(ax2) f�ur a = 1 und a = 1=2A.10 Aufgaben zu Kapitel 101. (Trigonometris he Funktionen)

A.10. AUFGABEN ZU KAPITEL 10 341(a) Leiten Sie die Funktionswerte von Sinus, Cosinus, Tangens und Cotangens f�urx = �=6, �=4 und �=3 her. Betra hten Sie dazu re htwinklige Dreie ke mit denentspre henden Winkeln und der Hypothenusenl�ange Eins. Wenden Sie denSatz von Phytagoras an, um die L�ange der Katheten zu bere hnen. Hinweis: inwel hem Verh�altnis stehen die Seiten eines Dreie ks, in dem alle Winkel glei h60Æ sind?L�osung:c b
a aa
bc c
β
A Bα αα
β βAbbildung A.32: (A) Glei hs henkliges Dreie k mit � = � = �=4 entspre henda = b . (B) Glei hseitiges Dreie k (� = 2� = �=3) mit Seitenl�ange = 1 . Die H�ohe(gestri helt) teilt die Basis in der Mitte, d.h. a = =2 .Na h Pythagoras ist a2 + b2 = 2 (1)Winkelsumme im ebenen Dreie k: �+ � + = � ; hier: = �2 ) �+ � = �2 (2)F�ur = 1 ist sin(�) = os(�) = a; sin(�) = os(�) = b (3)Au�erdem ist tan(�) = 1 ot(�) = ab und tan(�) = 1 ot(�) = ba (4)1. Fall (vgl. Abb. A.32 A): Sei� = �4 ) � = �4 na h (2)) a = b da � = �) 2a2 = 1 mit (1) und = 1) a = 1p2 = p22 (nur die positive Wurzel wird ben�otigt)) sin��4� = os��4� = p22 na h (3)) tan��4� = ot��4� = 1 na h (4)2. Fall (vgl. Abb. A.32 B): Sei� = �3 ) � = �6 na h (2)Wie aus der Skizze ersi htli h ist a = =2 , d.h. f�ur = 1 ist a = 1=2 und dahersin��6� = os��3� = 12Au�erdem ist wegen (1) b2 + 14 = 1) b = p32) sin��3� = os��6� = p32 na h (3)

342 ANHANG A. L �OSUNGEN DER AUFGABEN) tan��3� = 1 ot ��3 � = 1tan ��6 � = ot��6� = p3 siehe (4)(b) Fertigen Sie eine Skizze der Graphen der Funktionen Sinus, Cosinus, Tangensund Cotangens an und tragen Sie die Ergebnisse aus Aufgabenteil (a) ein!−4 −2 0 2 4 6 8 10
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
π/4
2−1/2
x
sin(
x)
−4 −2 0 2 4 6 8 10
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
π/4
x
cos(
x)
−1.5 −1 −0.5 0 0.5 1 1.5
−5
−4
−3
−2
−1
0
1
2
3
4
5
π/4
x
tan(
x)
−5
−3
−1
1
3
5
0 0.5 1 1.5 2 2.5 3π/4
x
cot(
x)
Abbildung A.33: Oben links: Graph der Funktion sin(x) ; oben re hts: os(x) ; untenlinks: tan(x) ; unten re hts: ot(x)2. (Additionstheoreme) Die Additionstheoreme f�ur Sinus und Cosinus lautensin(x+ y) = os(x) sin(y) + sin(x) os(y) os(x+ y) = os(x) os(y)� sin(x) sin(y)(a) �Uberpr�ufen Sie beispielhaft die Ri htigkeit der Additionstheoreme, indem Siedazu sin(�=2) und os(�=2) bere hnen und dabei einmal �=2 = �=4 + �=4und einmal �=2 = �=6 + �=3 setzen. Verwenden Sie die bekannten Werte derWinkelfunktionen aus der vorherigen Aufgabe.sin(x+ y) = os(x) sin(y) + sin(x) os(y) (1) os(x+ y) = os(x) os(y)� sin(x) sin(y) (2)F�ur �2 = �6 + �3sin��2� = os��6� sin��3�+ sin��6� os��3�= p32 � p32 + 12 � 12= 34 + 14= 1

A.10. AUFGABEN ZU KAPITEL 10 343und os��2� = os��6� os��3�� sin��6� sin��3�= p32 � 12 � 12 � p32= 0f�ur �2 = �4 + �4) sin��2� = os��4� sin��4�+ sin��4� os��4�= p22 � p22 + p22 � p22= 24 + 24= 1sowie os��2� = os��4� os��4�� sin��4� sin��4�= p22 � p22 � p22 � p22= 0(b) Leiten Sie die beiden Additionstheoreme jeweils einmal na h x und einmalna h y ab. Was f�allt Ihnen auf? Warum sind die Ableitungen na h x und na hy identis h?Ableitung der linken Seite von (1) na h xddx sin(x+ y) = os(x+ y)Ableitung der re hten Seite von (1) na h xddx ( os(x) sin(y) + sin(x) os(y)) = � sin(x) sin(y) + os(x) os(y)Zusammen ergibt si h Glei hung (2).Ableitung der linken Seite von (1) na h yddy sin(x+ y) = os(x+ y)Ableitung der re hten Seite von (1) na h yddy ( os(x) sin(y) + sin(x) os(y)) = � sin(x) sin(y) + os(x) os(y)ergibt erneut Glei hung (2).Die Ableitungen na h x und y sind identis h auf Grund der Symmetrie von xund y in Glei hung (1) { bei Vertaus hung von x und y �andert si h ni hts.Ableitung der linken Seite von (2) na h xddx os(x+ y) = � sin(x+ y)

344 ANHANG A. L �OSUNGEN DER AUFGABENAbleitung der re hten Seite von (2) na h xddx ( os(x) os(y)� sin(x) sin(y)) = � sin(x) os(y)� os(x) sin(y)Zusammen ergibt si h diesmal Glei hung (1).Bei Ableitung na h y ergibt si h das glei he Resultat, weil Glei hung (2) wieGlei hung (1) symmetris h in x und y ist.3. (Tangens und Cotangens) Der Tangens und der Cotangens sind wie folgt de�-niert: tan(x) = sin(x) os(x) und ot(x) = os(x)sin(x)(a) Wo haben die beiden Funktionen ihre Nullstellen?Nullstellen: tan(x) = 0 , sin(x) = 0 ; weil j os(x)j � 1 f�ur alle x 2 R undweil os(x) 6= 0 , falls sin(x) = 0) x = n�; n 2 N ot(x) = 0, os(x) = 0 vgl. oben ) x = �2 + n�; n 2 N(b) Wie verh�alt si h der Tangens bzw. der Cotangens an den Stellen, wo os(x) = 0bzw. sin(x) = 0 ist?Wenn os(x) = 0 ist, divergiert der Tangens gegen �1, wobei si h das Vorzei- hen aus dem Sinus ergibt, und ot(x) = 0. Wenn sin(x) = 0 ist, ergibt si humgekehrt tan(x) = 0 und ot(x) ! �1, wobei si h das Vorzei hen aus demCosinus ergibt.( ) Bere hnen Sie die erste Ableitung von Tangens und Cotangens dur h Anwen-dung der Quotientenregel. Wel hen Wert haben die Ableitungen an den Null-stellen von Tangens und Cotangens?ddx tan(x) = os(x) os(x) � sin(x)(� sin(x))[ os(x)℄2= 1 os2(x) ;weil na h Pythagoras os2(x) + sin2(x) = 1 .ddx ot(x) = � sin(x) sin(x) � os(x) os(x)[sin(x)℄2= � 1sin2(x)tan(x) = 0, x = n� n 2 N ) tan0(n�) = 1 os2(n�) = 1; n 2 N ot(x) = 0 , x = �2 + n�; n 2 N ) ot0(�2 + n�) = � 1sin2(�2+n�) =�1; n 2 N(d) Skizzieren Sie die Graphen von Tangens und Cotangens. (siehe Abbildung A.34)4. (Anwendung aus der Populations�okologie) In Oberbergen (Kaiserstuhl) wurdedas Wanderverhalten der Zebras hne ke (Zebrina detrita) untersu ht. Die Vermu-tung war, da� si h die S hne ken in den B�os hungen zwis hen den Weinbergen

A.10. AUFGABEN ZU KAPITEL 10 345−4 −3 −2 −1 0 1 2 3 4
−10
−8
−6
−4
−2
0
2
4
6
8
10
x
f(x)
tan(x)cot(x)
Abbildung A.34: Graph der Funktionen tan(x) und ot(x)haupts�a hli h hangaufw�arts bewegen, um Abdriftverluste, die dur h starke Re-genf�alle oder Erosion entstehen, auszuglei hen. Es mu�te also die mittlere Ausbrei-tungsri htungsri htung der S hne ken festgestellt werden. Dazu wurden am erstenTag etwa 100 S hne ken, die innerhalb eines Quadratmeters gefunden wurden, in-dividuell markiert und ihre Position vermerkt. Die Position setzt si h aus einemx-Wert, der die Lage parallel zur B�os hung festlegt, und einem y-Wert, der die La-ge senkre ht zur B�os hung festlegt, zusammen. Jede S hne ke hat also am erstenTag ein Koordinatenpaar (x1; y1) zugeordnet bekommen. In den darau�olgendendrei Tagen wurden die S hne ken gesu ht und ihre neue Position bestimmt: (x2; y2)am zweiten, (x3; y3) am dritten und (x4; y4) am vierten Tag.(a) Wir betra hten eine einzelne S hne ke. Wie weit ist sie vom 1. auf den 2. Tag ge-kro hen? Betra hten Sie dazu das re htwinklige Dreie k in der Abbildung. Wielang sind die Katheten a und b, ausgedr�u kt in den Koordinaten der S hne keam ersten und am zweiten Tag, (x1; y1) und (x2; y2)? Bere hnen Sie damit dieDistanz !a = x1 � x2; b = y1 � y2 ) =p(x2 � x1)2 + (y2 � y1)2(b) In wel he Ri htung ist Sie gekro hen? Bere hnen Sie den Winkel � (siehe Ab-bildung), wiederum in Abh�angigkeit der beiden Koordinatenpaare.sin� = b ) � = ar sin� b � = ar sin y2 � y1p(x2 � x1)2 + (y2 � y1)2!( ) In wel he Ri htung und wie weit ist die S hne ke vom 2. auf den 3., vom 3. aufden 4. und vom 1. auf den 4. Tag gekro hen?Sei 32 die Stre ke, die die S hne ke vom 2. auf den 3. Tag zur�u klegt, dann ist 32 = p(x3 � x2)2 + (y3 � y2)2 und allgemein (i+1)i = p(xi+1 � xi)2 + (yi+1 � yi)2

346 ANHANG A. L �OSUNGEN DER AUFGABENvon Tag i auf Tag i+ 1 und die Ri htung ergibt si h entspre hend aus�(i+1)i = ar sin yi+1 � yip(xi+1 � xi)2 + (yi+1 � yi)2!Insgesamt jedo h hat si h die S hne ke vom Ausgangspunkt nur um 41 = p(x4 � x1)2 + (y4 � y1)2in Ri htung �41 = ar sin y4 � y1p(x4 � x1)2 + (y4 � y1)2!entfernt.5. (Ableitung der Umkehrfunktion, Trigonometris he Funktionen) Bere hnen Siedie ersten Ableitungen von Ar ussinus und Ar ustangens dur h Anwendung derRegel zur Di�erentiation von Umkehrfunktionen. Ber�u ksi htigen Sie au h die Be-ziehung sin2(x) + os2(x) = 1, so dass in Ihren Ergebnissen keine trigonometris heFunktionen mehr vorkommen!f(x) = ar sin(x)) f�1(x) = sin(x)) �f�1(x)�0 = os(x)) f 0(x) = 1 os(ar sin(x)) vgl. (9.17) im SkriptAus os2(x) + sin2(x) = 1 folgt os(x) =q1� sin2(x) und damitar sin0(x) = 1q1� sin2(ar sin(x))= 1p1� x2 f�ur x 2 (�1; 1)Nun zu g(x) = ar tan(x)) f�1(x) = tan(x)) �f�1(x)�0 = 1 os2(x) vgl. Aufg. 3) g0(x) = os2(ar tan(x))Es gilt au h os2(x) + sin2(x) = 1, 1 +� sin(x) os(x)�2 = 1 os2(x), 1 + tan2(x) = 1 os2(x)) os2(x) = 11 + tan2(x)

A.10. AUFGABEN ZU KAPITEL 10 347) ar tan0(x) = 11 + tan(ar tan(x))2 = 11 + x26. (Kurvendiskussion) Diskutieren Sie das Verhalten der Funktion Ar ustangensund der Funktion \Tangens Hyperboli us", tanh(x) := sinh(x)= osh(x). Verglei- hen Sie ans hlie�end das Verhalten dieser beiden Funktionen.Anmerkung: Der Tangens Hyperboli us tritt bei vielen Betra htungen zur Kinetik hemis her Reaktionen auf und wird au h gerne als ph�anomenologis he Bes hrei-bung monotoner Abh�angigkeiten mit S�attigung (zum Beispiel: Aktivit�at eines Neu-rons als Funktion der Stimulierung) verwendet. Beide Funktionen geh�oren damitzum Basisrepertoire der mathematis hen Biologie.f(x) = ar tan(x) g(x) = tanh(x) = sinh(x) osh(x)D = R D = RW = (��2 ; �2 ) � R W = (�1; 1) � Rlimx!1 f(x) = �2 limx!1 g(x) = 1limx!�1 f(x) = ��2 limx!�1 g(x) = �1f(0) = 0 , einzige Nullstelle g(0) = 0 , einzige Nullstellef 0(x) = 11+x2 > 0 8 x 2 D g0(x) = osh2(x)�sinh2(x) osh2(x)= 1 osh2(x) > 0 8 x 2 Dkeine lokalen Extrema keine lokalen Extremaf 00(x) = �2x(1 + x2)�2 g00(x) = �2 sinh(x) osh2(x)Wendepunkt bei (0; 0) Wendepunkt bei (0; 0)punktsymmetris h punktsymmetris h−5 −4 −3 −2 −1 0 1 2 3 4 5
−1.5
−1
−0.5
0
0.5
1
1.5
x
f(x)
arctan(x)tanh(x)Abbildung A.35: Graph der Funktionen ar tan(x) und tanh(x)

348 ANHANG A. L �OSUNGEN DER AUFGABENA.11 Aufgaben zu Kapitel 111. (Komplexe Zahlen: Addition) Bere hnen Sie jeweils die Summe und Di�erenzder komplexen Zahlen z1 und z2. Tragen Sie ans hlie�end jeweils beide Zahlen unddas Ergebnis in die Gau�s he Zahlenebene ein. Bere hnen Sie au�erdem Betrag undArgument des Ergebnisses und die zu Ihrem Ergebnis konjugiert komplexe Zahl. Siek�onnen alles au h dur h Messen in der Zei hnung �uberpr�ufen!(a) z1 = 1 + 3i, z2 = 2 + i z1 + z2 = 1 + 3i + 2 + i= 3 + 4i) jz1 + z2j = p32 + 42= 5) arg(z1 + z2) = ar os�35� = ar tan�43�= 53:13Æz1 + z2 = 3� 4iz1 � z2 = 1 + 3i� (2 + i)= �1 + 2i) jz1 � z2j = p(�1)2 + 22= p5) arg(z1 � z2) = ar os�� 1p5� = � + ar tan� 2�1�= 116:6Æz1 � z2 = �1� 2i(b) z1 = i, z2 = �2 z1 + z2 = �2 + i) jz1 + z2j = p(�1)2 + 22= p5) arg(z1 + z2) = ar os�� 2p5� = � + ar tan� 1�2�= 153:4Æz1 + z2 = �2� iz1 � z2 = 2 + i) jz1 � z2j = p22 + 12= p5) arg(z1 � z2) = ar os� 2p5� = ar tan�12�= 26:6Æz1 � z2 = 2� i

A.11. AUFGABEN ZU KAPITEL 11 349a)
Re
Im
1
1
Re
Im
1
1
b)
z
z
z +z
z -z
z
z
z -zz +z
2
1
1
1 2
2
1
1 2 1
2
2
Abbildung A.36: Links: zu Aufgabe 1a; re hts: zu Aufgabe 1b2. (Komplexe Zahlen: Multiplikation) Bere hnen Sie das Produkt von �i mit(a) i i � (�i) = (�1) � i2= (�1) � (�1)= 1(b) (�i) (�i) � (�i) = (�1)2 � i2= 1 � (�1)= �1( ) (�3) (�3) � (�i) = (�1)2 � 3 � i= 3i(d) (2i + 1) (2i + 1) � (�i) = 2i � (�i) + 1 � (�i)= 2� i vgl. (a)in artesis hen Koordinaten. F�uhren Sie in (a) und ( ) die Re hnung au h in Po-larkoordinaten dur h.In Polarkoordinaten ist r(�i) = j � ij = 1 und arg(�i) = ��2 oder 3�2sowie r(i) = jij = 1 und arg(i) = �2 ) r(i � (�i)) = r(i) � r(�i) = 1 und arg(i �(�i)) = arg(i) + arg(�i) = 0, zusammen also 1.Wegen r(�3) = j � 3j = 3 und arg(�3) = � ) r((�3) � (�i)) = 3und arg((�3) � (�i)) = � � �2 = �2 , zusammen also 3 � ei�23. (Komplexe Zahlen: Potenzen) Bere hnen Sie mit Hilfe der Moivres hen Formelfolgende Potenzen der komplexen Zahl z. Dazu m�ussen Sie zuerst den Betrag unddas Argument von z bestimmen. Tragen Sie jeweils z und die bere hnete Potenzvon z in die Gau�s he Zahlenebene ein.

350 ANHANG A. L �OSUNGEN DER AUFGABENFormel von Moivre:zn = rn( os(n�) + i sin(n�)) f�ur z = r( os(�) + i sin(�)) = x+ iy(a) z2 , f�ur z = 1 + iz = 1 + i) r(z) = p12 + 12= p2) arg(z) = ar tan�11� = ar os� 1p2� = ar sin� 1p2�= �4) z2 = p22 � os�2 � �4�+ i sin�2 � �4��= 2(0 + i � 1)= 2 i(b) z3 , f�ur z = 2i z = 2i) r(z) = 2) arg(z) = ar os�02� = ar sin�22�= �2) z3 = 23 � os�3 � �2 �+ i sin�3 � �2 ��= 8(0 + i � (�1))= �8 ia)
Re
Im
1
1
Imb)2
Re2
z
z
z
z
2
3
φ3φ
φ
φ
Abbildung A.37: Links: zu Aufgabe 3a; re hts: zu Aufgabe 3b4. (Komplexe Zahlen, trigonometris he Funktionen) Wir wollen mit Hilfe der Moi-vres hen Formel zeigen, dass gilt: sin(3�) = 3 os2(�) sin(�) � sin3(�). Gehen Siedabei wie folgt vor:

A.11. AUFGABEN ZU KAPITEL 11 351(a) Bere hnen Sie z3 mit der Formel von Moivre f�ur z = os(�) + i sin(�).F�ur z = os(�) + i sin(�)= 1 � ( os(�) + i sin(�))ist z3 = 13( os(3�) + i sin(3�))= os(3�)| {z }Realteil +i sin(3�)| {z }Imagin�arteil(b) Bere hnen Sie mit dem binomis hen Satz z3 = [ os(�) + i sin(�)℄3 und trennenSie das Ergebnis in Real- und Imagin�arteil.( os(�) + i sin(�))3= os3(�) + 3i os2(�) sin(�) + 3 � (i)2 � os(�) sin2(�) + (i)3 sin3(�)= os3(�) � 3 os(�) sin2(�)| {z }Realteil + i (3 os2(�) sin(�)� sin3(�)| {z }Imagin�arteil )( ) Verglei hen Sie nun jeweils Real- und Imagin�arteil aus den Ergebnissen von (a)und (b). Wel he Glei hung f�ur sin(3�) erhalten Sie?Realteil: os(3�) = os3(�) � 3 os(�) sin2(�)Imagin�arteil: sin(3�) = 3 os2(�) sin(�) � sin3(�) q.e.d.(d) Testen Sie Ihr Resultat f�ur � = 0, � = �=4, � = �=3 und � = �=2.� = 0 sin(3�) = sin(0) = 03 os2(0) sin(0)� sin3(0) = 0� = �4 sin�3 � �4� = p223 os2 ��4� sin��4�� sin3 ��4� = 3 � p22 !2 � p22 � p22 !3= 2 p22 !3= p22� = �3 sin�3 � �3 � = sin(�)= 03 os2 ��3� sin��3�� sin3 ��3 � = 3 ��12�2 p32 !� p32 !3= 3p38 � 3p38= 0

352 ANHANG A. L �OSUNGEN DER AUFGABEN� = �2 sin�3 � �2 � = �13 os2 ��2� sin��2�� sin3 ��2 � = 3 � 0 � 1� 13= �15. (imagin�are Exponentialfunktion) Sie kennen bereits die Taylorreihe der Expo-nentialfunktion ex = 1Xk=0 xkk!(a) Geben Sie die Taylorreihe von ei� an, indem Sie in die Taylorreihe der Expo-nentialfunktion i� statt x einsetzen.ei� = 1Xk=0 (i�)kk!(b) S hreiben Sie die ersten se hs Glieder dieser Reihe aus, verwenden Sie dabeii2 = �1 und trennen Sie na h Real- und Imagin�arteil.5Xk=0 (i�)kk! = 1 + i�+ 12(i�)2 + 16(i�)3 + 124(i�)4 + 1120(i�)5= 1 + i�� 12�2 � i 16�3 + 124�4 + i 1120�5= �1� 12�2 + 124�4�| {z }Realteil + i ��� 16�3 + 1120�5�| {z }Imagin�arteil( ) Sie kennen au h s hon die Taylorreihen von sin(�) und os(�)sin(�) = 1Xk=0 (�1)k(2k + 1)!�2k+1 und os(�) = 1Xk=0 (�1)k(2k)! �2kErkennen Sie diese im Real- und Imagin�arteil aus Teilaufgabe (b) wieder? Istalso die Beziehung ei� = os(�) + i sin(�)ri htig?Der Realteil entspri ht den ersten drei Termen der Cosinusreihe, der Ima-gin�arteil stellt die ersten drei Terme der Sinusreihe dar.(d) Die Polarkoordinatendarstellung einer beliebigen komplexen Zahl z lautetz = r[ os(�) + i sin(�)℄Ersetzen Sie darin os(�) + i sin(�) dur h das Ergebnis aus ( ).z = r( os(�) + i sin(�))= r � ei�

A.11. AUFGABEN ZU KAPITEL 11 353(e) Bere hnen Sie Betrag und Argument der komplexen Zahl z = 1+ i. Stellen Siez in der im Aufgabenteil (d) gefundenen kompakten Form der Polarkoordina-tendarstellung dar. z = 1 + i) r(z) = p2; arg(z) = �4z = r(z) � eiarg(z) = p2 � ei�46. (Komplexe Zahlen: Division) Bere hnen Sie Real- und Imagin�arteil des Quotien-ten q = z1=z2 f�ur folgende Zahlen z1 und z2. Erweitern Sie dazu den Bru h mit derkomplex konjugierten Zahl �z2 des Nenners z2 und wenden Sie die dritte binomis heFormel an, um den Nenner reell zu ma hen.(a) z1 = 1� i, z2 = 1 + i q = 1� i1 + i = 1� i1 + i � 1� i1� i= 1� 2i� 12 = �id.h. Re(q) = 0 und Im(q) = �1(b) z1 = 3i� 2, z2 = 2� 4iq = �2 + 3i2 + (�4)i = �4 + 6i� 8i + (�12)4 + 16= �1620 + i�� 220�! Re(q) = � 45 , Im(q) = � 110( ) z1 = a+ ib, z2 = + id q = a+ ib + id � � id � id= a + bd 2 + d2 + i b� ad 2 + d2also Re(q) = a +bd 2+d2 und Im(q) = b�ad 2+d27. (Moivres he Formel) Wie nun bereits wiederholt gezeigt, kann eine komplexeZahl z au h in folgender kompakter Form dargestellt werden (Polardarstellung):z = rei' ; r = jzj und ' = arg (z)(a) Bere hnen Sie z3 f�ur z = 2ei�=6 und geben Sie das Ergebnis in der arithmeti-s hen Darstellung (z = x+ iy) an. Verwenden Sie dabeiei' = os(') + i sin(')und die Tabelle im Skript Seite 137 der Werte von Sinus und Cosinus f�urspezielle Argumente.

354 ANHANG A. L �OSUNGEN DER AUFGABENAllgemein istzn = [rei�℄n = rnein� Re henregeln f�ur Potenzenz = 2ei�6) z3 = 23ei3�6= 8 � ei�2= 8� os��2�| {z }=0 +i sin��2�| {z }=1 �= 8 id.h. z3 = 0 + 8i oder Re(z3)=0 und Im(z3)=8 .(b) Bere hnen Sie allgemein zn f�ur z = rei' und geben Sie das Ergebnis wie inTeilaufgabe (a) in der arithmetis hen Darstellung an. Sie erhalten so die Moi-vres he Formel. zn = �rei��n= rnein�= rn( os(n�) + i sin(n�))oder Re(zn) = rn os(n�) und Im(zn) = rn sin(n�)8. (Komplexe Zahlen: Wurzeln) Mit Hilfe der Darstellung z = rei' k�onnen wir sehreinfa h Wurzeln von beliebigen komplexen Zahlen z bere hnen. Dazu aber erst eineVor�uberlegung:(a) S hreiben Sie die komplexe Zahl z0 = p2 ei�=4 in der arithmetis hen Darstel-lung. z0 = p2ei�2= p2� os��4�+ i sin��4��= p2 p22 + i p22 !!= 1+ i(b) Was erhalten Sie f�ur die arithmetis he Darstellung der Zahlen z1 = p2 ei(�=4+2�),z0 = p2 ei(�=4+4�) und allgemein z0 = p2 ei(�=4+2k�), (k 2 Z) ?z1 = p2ei(�4+2�)= p2� os��4 + 2��+ i sin��4 + 2���= 1 + iweil os und sin 2�-periodis h.Allgemein:Addition eines ganzzahligen Vielfa hen von 2� zum Argument einer komplexenZahl �andert diese ni ht.z0 = p2ei(�4+2k�)= p2� os��4 + 2k��+ i sin��4 + 2k���= 1 + i k 2 N

A.11. AUFGABEN ZU KAPITEL 11 355ImIm
Re
1
1
i π
2e
2e
4e
i
i
π/2
3π/2
Re2
2
zu d) zu e)
8e
2e
2e
i
i
i
π/2= 8i
π/62e
i5π/6
3π/2 = -2iAbbildung A.38: Zu Aufgabe 8d (links) und 8e (re hts)( ) Zeigen Sie f�ur beliebige Zahlen z, dass giltz = rei' = rei('+2k�) ; k 2 ZJede komplexe Zahl kann also auf unendli h viele vers hiedene Weisen darge-stellt werden (f�ur jedes k eine).z = rei�= rei(�+2k�)= r( os(�+ 2k�) + i sin(�+ 2k�)) k 2 Z= r( os(�) + i sin(�))(d) Ziehen Sie nun aus z = 4ei(�+2k�) ; k 2 Z die Wurzel, bere hnen Sie alsoz1=2. Wel hen Betrag hat z1=2? Was erhalten Sie als Argument von z1=2 f�urk = 0; 1; 2; 3; 4? Wieviele tats�a hli h vers hiedene Zahlen erhalten Sie also?Zei hnen Sie diese und z in die Gau�s he Zahlenebene ein. Haben Sie gemerkt,dass Sie gerade die Wurzel aus einer negativen Zahl gezogen haben?z = 4ei(�+2k�)) pz = z 12= p4e i(�+2k�)2) jzj = 2 und arg(z) = �2 + k�; k 2 Nund somit arg(z) = �2 ; 3�2 ; 5�2 ; 7�2 ; 9�2 f�ur k = 0; 1; 2; 3; 4Tats�a hli h vers hieden (weil zwis hen 0 und 2�) sind die Zahlen zum Argument�2 und 3�2 .(e) Bere hnen Sie genauso wie in (d) die dritte Wurzel aus z = 8ei�=2. VergessenSie ni ht den Term 2k� im Argument von z. Wieviele vers hiedene L�osun-gen erhalten Sie diesmal? Skizzieren Sie das Ergebnis und z in der Gau�s henZahlenebene. z = 8ei�2= 8ei(�2+2k�)) 3pz = z 13= 3p8e i(�2 +2k�)3

356 ANHANG A. L �OSUNGEN DER AUFGABEN= 2ei(�6+ 2k�3 )) f�ur k = 0; 1; 2; 3; : : : istarg � 3pz� = �6 ; 5�6 ; 9�6 ; 13�6 �= 2� + �6 entspri ht k = 0� ; : : :Es gibt drei vers hiedene dritte Wurzeln von z2 � ei�6 ; 2 � ei 5�6 ; 2 � ei 3�2(f) Wir wollen die Glei hung x2 = 9 na h x au �osen. Dazu m�ussen wir aus 9 dieWurzel ziehen. Gehen Sie dabei so vor wie in Teilaufgabe (d) (wel hen Betragund wel hes Argument hat die reele Zahl 9 ?). Wieviele L�osungen erhalten Sie?Kommt Ihnen das bekannt vor?z = 9= 9ei(0+2k�)) x = pz= z 12= +p9e i(0+2k�)2= 3ei(0+k�)) jz 12 j = 3 und arg�z 12� = 0 + k�; k 2 N) arg�z 12� = 0; �; 2�( entspri ht 0 ); 3�( entspri ht � ); : : :die L�osungen sind also x1 = 3 � ei0 = 3 und x2 = 3 � ei� = �3 .A.12 Aufgaben zu Kapitel 121. (Integration) Bere hnen Sie folgende elementare Integrale(a) Z 21 x2 dx = �13x3�21 = 13 � 23 � 13 � 13 = 83 � 13 = 73(b) Z 21 6x2 dx = �63x3�21 = 2 � 23 � 2 � 13 = 16� 2 = 14oder einfa her mit (a) 6 Z 21 x2 dx = 673 = 14( ) Z 21 4x3 dx = �44x4�21 = 24 � 14 = 16� 1 = 15(d) Z 21 6x2 + 4x3 dx = Z 21 6x2 dx+ Z 21 4x3 dx = 14 + 15 = 29

A.12. AUFGABEN ZU KAPITEL 12 357(e) Da e�1 = lima!1 e�a = 0 , istZ 10 e�x dx = ��e�x�10 = �e�1 � ��e�0� = 0 + 1 = 1 ;(f) Genauso istZ 10 e�2x dx = ��12e�2x�10 = �12e�21 ���12e�2�0� = 0 + 12 = 12(g) Z �0 sin(x) dx = [� os(x)℄�0 = � os(�) � (� os(0))= �(�1) + 1 = 2 (Integral �uber halbe Periode)(h) Z 4�0 os (x=2) dx = [2 sin (x=2)℄4�0 = 2 sin (2�)� 2 sin(0)= 2 � 0� 2 � 0 = 0 (Integral �uber ganze Periode)(i) Z ��=2 sin(2x) dx = ��12 os(2x)���=2 = �12 os (2�) + 12 os(�)= �12 � 1 + 12(�1)= �1 (2. H�alfte der um 2 gestau hten Periode)(j) Z 21 4x dx = [4 ln jxj℄21 = 4 ln 2� 4 ln 1 = 4 ln 2� 0= 4 ln 2 = ln 24 = ln 16(k) F�ur b 2 R ist Z b0 9x2 dx = �93x3�b0 = 3 � b3 � 3 � 03 = 3b3(l) Mit osh(�x) = osh(x) istZ 1�1 sinh (x=2) dx = [2 osh (x=2)℄1�1 = 2 osh�12�� 2 osh��12�= 2 osh�12�� 2 osh�12� = 0 :2. (Partielle Integration und Substitution) Bere hnen Sie mit Hilfe der partiellenIntegration oder geeigneten Substitutionen folgende Integrale mit a; b 2 R und0 < a < b:

358 ANHANG A. L �OSUNGEN DER AUFGABEN(a) Z 10 4xe2x dx :W�ahle f 0(x) = e2x und g(x) = 4x , dann ist f(x) = 12e2x und g0(x) = 4) partielle IntegrationZ 10 4xe2x dx = �4x12e2x�10 � Z 10 412e2x dx = �2xe2x�10 � �212e2x�10= 2e2 � 0� �e2 � 1� = e2 + 1(b) Z 10 x2ex dx :W�ahle f 0(x) = ex und g(x) = x2 ) f(x) = ex und g0(x) = 2x und somitZ 10 x2ex dx = �x2ex�10 � Z 10 2xex dxNo hmals partiell Integrieren mit f 0(x) = ex und g(x) = 2x ) f(x) = ex undg0(x) = 2 liefertZ 10 x2ex dx = �x2ex�10 � Z 10 2xex dx= 1 � e1 � 0 � 1��[2xex℄10 � Z 10 2ex dx�= e� �2e� [2ex℄10�= e� 2e + 2e� 2= e� 2( ) Z 41 3x2 ln(x) dxW�ahle f 0(x) = 3x2 und g(x) = ln(x) ) f(x) = x3 und g0(x) = 1x und somitZ 41 3x2 ln(x) dx = �x3 ln(x)�41 � Z 41 x3 1x dx= 43 ln 4� 1 � 0� �13x3�41= 64 ln 4��1343 � 13�= 64 ln 4� 633= 128 ln2� 21(d) Z 10 �2xe�x2 dxMit der Substitution u(x) = �x2 ) du = �2x dx und u(0) = 0 sowieu(1) = �1 . Zusammen alsoZ 10 �2xe�x2 dx = Z �10 eu du= [eu℄�10 = e�1 � 1

A.12. AUFGABEN ZU KAPITEL 12 359(e) Z ba 6x2 sin(2x3) dxMit der Substitution u(x) = 2x3 ) du = 6x2 dx ; u(a) = 2a3 und u(b) = 2b3ergibt si h Z ba 6x2 sin(2x3) dx = Z 2b32a3 sin(u) du= [� os(u)℄2b32a3= � os(2b3) + os(2a3)(f) Z �0 os(2x+ �) dxSubstituiere u(x) = 2x+ � ) du = 2 dx ; u(0) = � und u(�) = 3� )Z �0 os(2x+ �) dx = 12 Z �0 2 os(2x+ �) dx= 12 Z 2�+�2�0+� os(u) du= 12 [sin(u)℄3��= 12(0� 0)= 03. (Partielle Integration und Substitution) Bere hnen Sie mit Hilfe der partiellenIntegration oder geeigneten Substitutionen folgende Integrale:(a) Z p�=20 x sin(4x2) dxSubstituiere u(x) = 4x2 ) du = 8x dx ; u(0) = 0 und u(p�=2 = � )Z p�=20 18 � 8x sin(4x2) dx = 18 Z �0 sin(u) du = 18 [� os(u)℄�0= 18(�(�1) + 1) = 14(b) Z 10 xe�x dx partiell integrieren:Z 10 xe�x dx = ��xe�x�10 � Z 10 1 � ��e�x� dx= limx!1 ��xe�x�+ Z 10 e�x dx= 0 + ��e�x�10= limx!1 ��e�x�+ e0= 1( ) Z 10 k2xe�kx dx ; k 2 R+k2 Z 10 xe�kx dx = k2 ��1kxe�kx�10

360 ANHANG A. L �OSUNGEN DER AUFGABEN+k2 �1k Z 10 1 � e�kx dx�= k2 � 0 + 1k ��1k e�kx�10= k2 � 1k2= 1Alternativ kann man au h y = kx substituierenZ 10 k2xe�kx dx = Z 10 (kx)e�kx kdx|{z}dy= Z y(1)=1y(0)=0 ye�y dy wie bei Aufg. (b)(d) Z �0 x2 sin�x3�2� dxSubstituiere u(x) = x3=�2 ) du = 3x2=�2 ; u(0) = 0 und u(�) = � )�23 Z �0 3�2 sin�x3�2� dx = �23 Z u(�)=�u(0)=0 sin(u) du= 23�2 vgl. (a)(e) Z �=20 os(x) os(sin(x)) dxSubstituiere u(x) = sin(x) ) du = os(x) dx ; u(0) = 0 und u(�=2) = 1 )Z �=20 os(x) os(sin(x)) dx = Z 10 os(u) du = [sin(u)℄10 = sin(1)(f) Z 11 ln(x2)2x2 dx kann wegen ln(x2) = 2 ln(x) umgeformt werden zuZ 11 ln(x2)2x2 dx = Z 11 6 2 ln(x)6 2x2 dx= Z 11 1x2 � ln(x) dxNun partiell integrieren mit u0 = 1x2 ) u = � 1x und v = ln(x) ) v0 = 1xZ 11 1x2 � ln(x) dx = �� 1x � ln(x)�11 � Z 11 �� 1x� � 1x dx= limx!1�� ln(x)x �| {z }=0 � +11 � 0 + Z 11 dxx2= �� 1x�11= limx!1�� 1x�+ 1= 1

A.12. AUFGABEN ZU KAPITEL 12 361� Der Logarithmus divergiert f�ur x ! 1 langsamer, als 1x gegen Null geht.Merkhilfe: So wie die Exponentialfunktion s hneller als jede Potenzfunktiongegen Unendli h strebt, w�a hst ihre Umkehrfunktion, der Logarithmus, lang-samer als alle Potenzen.4. (Integration) Werten Sie die folgenden Integrale aus:(a) Z 21 x5 dx = �16x6�21 = 646 � 16 = 212 = 10:5(b) Z ba xn dx = Z ba xndx = � 1n+ 1xn+1�ba = n+ 1(bn+1 � an+1) f�ur n > 0.( ) Z ba ( x)n dx = n � 1n+ 1xn+1�ba = nn+ 1(bn+1 � an+1) f�ur n > 0.(d) Z 10 (x3+ 12px)dx = Z 10 x3dx+Z 10 12x 12 dx = �14x4�10+ 12 �23x 32 �10 = 14 + 13 = 712(e) Z 31 1x2 dx = Z 31 x�2dx = [�x�1℄31 = �13 + 1 = 23(f) Z 10 (x � 1)4 dx = �15(x� 1)5�10 = 0� (�15) = 15(g) Z 0�1 exp(x) dx = lima!�1 [exp(x)℄0a = exp(0)� lima!�1 exp(a) = 1� 0 = 1(h) Z 1�1(x4 � x2) dx = �15x5 � 13x3�1�1 = 15 � 13 � (�15 + 13) = � 415(i) Z 1�1(x3 � x) dx = �14x4 � 12x2�1�1 = 14 � 12 � (14 � 12) = 0(j) Z �=2��=2 sin(x) dx = [� os(x)℄�=2��=2 = 0(k)Z �=2��=2 os(!t) dt = � 1! sin(!t)��=2��=2 = 1! [sin(!�2 )� sin(�!�2 )℄= 1! [sin(!�2 ) + sin(!�2 )℄ = 2! [sin(!�2 )℄(l) Z ba sgn(x) dx = Z ba xjxjdxFallunters heidung wegen der Betragsfunktion:(1) a; b > 0, dann ist jxj = x) Z ba xjxjdx = Z ba 1 dx = [x℄ba = b� a(2) a; b < 0, dann ist jxj = �x) Z ba xjxjdx = Z ba �1 dx = [�x℄ba = �b+ a

362 ANHANG A. L �OSUNGEN DER AUFGABEN(3) a < 0; b > 0: Z ba xjxjdx = limy!0 Z ya xjxjdx+ limy!0 Z by xjxjdx = limy!0[�x℄ya+ limy!0[x℄by =�0� (�a) + b� 0 = a+ b5. (Integration) Sei f(x) eine gerade und g(x) eine ungerade Funktion. Zeigen Sie:(a) Z a�a f(x) dx = 2 Z a0 f(x) dx f�ur alle reellen a.(b) Z a�a g(x) dx = 0 f�ur alle reellen a.( ) Was folgern Sie daraus f�ur Z a�a f(x)g(x) dxL�osung:(a) Z a�a f(x)dx = Z 0�a f(x)dx+ Z a0 f(x)dxWegen f(x) = f(�x) ist Z 0�a f(x)dx = Z 0�a f(�x)dx = � Z 0a f(y)dy = Z a0 f(y)dy .Dabei wurde y = �x) dy = �dx substituiert und es wurden die Integrationsgren-zen vertaus ht, was zu einer Vorzei hen�anderung des Integrals f�uhrt. Weil nun aberder Name der Integrationsvariable beliebig ist ("Dummy Variable\), folgtZ a�a f(x)dx = Z a0 f(y)dy + Z a0 f(x)dx = 2 Z a0 f(x)dx (q.e.d.)(b) Sei g(x) = �g(�x) . Wieder wird y = �x) dy = �dx substituiert )Z a�a g(x)dx = Z 0�a g(x)dx + Z a0 g(x)dx = � Z 0�a g(�x)dx + Z a0 g(x)dx= Z 0a g(y)dy + Z a0 g(x)dx = � Z a0 g(y)dy + Z a0 g(x)dx = 0(q.e.d.)( ) Da das Produkt einer geraden mit einer ungeraden Funktion ungerade ist (h(x) :=f(x) � g(x)) h(�x) = f(�x) � g(�x) = f(x) � (�g(x)) = �f(x) � g(x) = �h(x)) giltZ a�a f(x)g(x) dx = 0 :6. (Mittelwert) Bere hnen Sie den Mittelwert der Funktion f(x) = 2x� x3(a) auf dem Intervall [1; 4℄ ;(b) auf dem Intervall [�5; 5℄ ;( ) �uber alle reellen Zahlen. Hinweis: Bere hnen Sie zun�a hst den Mittelwert aufeinem Intervall [� ; ℄ und lassen Sie dann gegen unendli h gehen.L�osung:

A.12. AUFGABEN ZU KAPITEL 12 363Der Mittelwert einer Funktion f(x) �uber das Intervall I = [a; b℄ ist per De�nitionhfia;b = 1b� a Z ba f(x) dx :(a) hfi1;4 = 14� 1 Z 41 2x� x3 dx = 13 �x2 � 14x4�41 = �48� 3=43 = �1614(b) hfi�5;5 = 110 Z 5�5 2x� x3dx = 110 �x2 � 14x4�5�5 = 0Diese L�osung folgt au h unmittelbar aus 5b!( ) hfi� ; = 12 Z � 2x� x3dx = 12 �x2 � 14x4� � = 2 � 14 4 � ( 2 � 14 4)2 = 0F�ur !1 gilt: lim !1hfi� ; = lim !1 0 = 07. (Integration) Bere hnen Sie das Volumen einer Kugel mit Radius R. Gehen Siedazu wie im Skript skizziert vor und verans hauli hen Sie si h die Methode, indemSie einige der S hnitt �a hen, �uber die integriert wird, in eine Kugel zei hnen.L�osung:Integration von Kreis �a hen (Tipp: Apfel dur hs hneiden!)Hauptbedingung: Z R�R �a2daNebenbedingung: a2 = R2 � x2 (aus Satz des Pythagoras)Z R�R �(R2 � x2)dx = � Z R�RR2 � x2dx = � �R2x� 13x3�R�R= �[R3 � 13R3 � (�R3 + 13R3)℄ = �(2R3 � 23R3)= 43�R38. (Substitution) Werten Sie folgende Integrale aus:(a) Z 10 1p1� x2 dx (Tipp: x = sin(y) setzen)(b) Z �=20 os(x) sin2(x) dx (Tipp: u = sin(x) setzen)( ) Z 11 exp(� x1+x )(1 + x)2 dxL�osung:(a) Substitution: x = sin(y); y = ar sin(x); y0 = ar sin(0) = 0; y1 = ar sin(1) = �2 ;

364 ANHANG A. L �OSUNGEN DER AUFGABENdxdy = os(y); dx = os(y) dy;Z 10 1p1� x2 dx = Z ar sin(1)ar sin(0) 1q1� sin2(y) os(y) dy= Z �20 1 os(y) os(y) dy = Z �20 1 dy = [y℄�20 = �2(b) Mit u(x) = sin(x)) dudx = os(x) ) du = os(x) dx )Z �=20 sin2(x)| {z }u2 os(x) dx| {z }du = Z sin(�=2)sin(0) u2 du = �13u3�10 = 13( ) Sei u(x) = x1 + x ) dudx = 1 � (1 + x) � x � 1(1 + x)2 = 1(1 + x)2 . Weiter ist u(1) = 1=2und limx!1u(x) = limx!1 x1 + x = limx!1�xx � 11 + 1=x� = 1)Z 11 exp(� x1 + x| {z }u(x) ) dx(1 + x)2| {z }du = Z 11=2 exp(�u) du = [� exp(�u)℄11=2= � exp(�1) + exp(1=2) = 1pe � 1e � 0:2386Zusammenfassung: Die Variable x wird dur h eine neue Variable u(x) ersetzt; dxwird aus dudx = u0(x) bere hnet zu duu0(x) = dx, du = u0(x) dx und eingesetzt.9. (Partielle Integration) Bere hnen sie das Integral Z ba [sin(x)℄2 dx(a) mit Hilfe der partiellen Integration,(b) indem sie zuerst aus der Moivres hen Formel und dem Satz des Pythagoras dieBeziehung sin2(x) = 12 [1 � os(2x)℄ herleiten und damit den Integranden vereinfa- hen.Aus ihrem Ergebnis folgt insbesondereZ k �20 [sin(x)℄2 dx = Z k �20 [ os(x)℄2 dx = k�4 :Verans hauli hen sie si h dieses Resultat graphis h.L�osung:(a) Z ba sin2(x) dx = Z ba sin(x) � sin(x) dx partiell integrieren:Mit f 0(x) = sin(x) und g(x) = sin(x) folgt f(x) = � os(x) sowie g0(x) = os(x)und damit:Z ba sin(x) � sin(x)dx = [� os(x) � sin(x)℄ba � Z ba [� os(x)℄ � os(x) dx

A.12. AUFGABEN ZU KAPITEL 12 365= [� os(x) � sin(x)℄ba + Z ba os2(x) dx= [� os(x) � sin(x)℄ba + Z ba [1� sin2(x)℄ dxIm letzten S hritt wurde 1 = os2(x)+sin2(x), os2(x) = 1�sin2(x) (Pythagoras)verwendet. Damit hat man errei ht, dass auf der re hten Seite ebenfalls das gesu hteIntegral steht )Z ba sin2(x) dx = [� os(x) � sin(x)℄ba + Z ba 1dx� Z ba sin2(x) dx ,2 Z ba sin2(x) dx = [� os(x) � sin(x)℄ba + Z ba 1dx ,Z ba sin2(x) dx = 12 [� os(x) � sin(x) + x℄ba= 12[b� a� os(b) sin(b) + os(a) sin(a)℄(b) Behauptung: sin2(x) = 12[1� os(2x)℄Beweis: Na h Moivre und Binomis hem Satz ist os(nx) + i sin(nx) = [ os(x) + i sin(x)℄n = nXk=0 ik�nk� osn�k(x) sink(x) :F�ur n = 2 also, os(2x) + i sin(2x) = 2Xk=0 ik�2k� os2�k(x) sink(x)= i0�20� os2(x) sin0(x) + i1�21� os(x) sin(x)+i2�22� os0(x) sin2(x)= os2(x) + i 2 os(x) sin(x)� sin2(x)Der Verglei h der Realteile liefert os(2x) = os2(x) � sin2(x)= 1� 2 sin2(x) (na h Pythagoras), sin2(x) = 12[1� os(2x)℄ (q.e.d.)Damit ergibt si h das gesu hte Integral zuZ ba sin2(x) dx = Z ba 12 [1� os(2x)℄ dx= 12 �x� 12 sin(2x)�ba= 12 [x� os(x) sin(x)℄ba= 12[b� a� os(b) sin(b) + os(a) sin(a)℄

366 ANHANG A. L �OSUNGEN DER AUFGABEN
0 1/2 1 3/2 20
0.2
0.4
0.6
0.8
1
x/π
sin2 (x
)
Abbildung A.39: Jedes der oben angedeuteten Re hte ke hat den Fl�a heninhalt �=2(bea hte das x in Einheiten von � gegeben ist) und wird vom Graphen der Funktionin zwei glei hgro�e St�u ke (= �=4) unterteilt, weil sin2(x) = 1� os2(x) .wie zuvor, weil sin(2x) = 2 os(x) sin(x) , wie aus dem Verglei h der Imagin�arteileoben folgt.10. (Partielle Integration) Zeigen Sie dur h partielle Integration, dass die Gam-mafunktion �(t) = Z 10 xt�1 exp(�x) dx ; t > 0der Glei hung �(t + 1) = t�(t) ; t > 0 gen�ugt und somit eine Verallgemeinerungdes Fakult�atsbegri�es auf reelle Zahlen t > 0 erm�ogli ht. Bere hnen Sie �(n) f�urn 2 f1; 2; 3g explizit.L�osung:�(t+ 1) = Z 10 xt exp(�x) dx= [�xt exp(�x)℄10 � Z 10 txt�1[� exp(�x)℄ dx= limx!1(�xt exp(�x))| {z }=0 +0t exp(�0)| {z }=0 +t Z 10 xt�1 exp(�x) dx= t�(t) (q.e.d.) ;weil exp(�x) f�ur x ! 1 s hneller gegen Null geht, als xt f�ur festes t divergiert(man denke an die Potenzreihe der Exponentialfunktion).Es ist�(1) = Z 10 x0 exp(�x) dx = Z 10 exp(�x) dx = [� exp(�x)℄10 = 1 = 0!�(2) = Z 10 x1 exp(�x) dx = [�x exp(�x)℄10 � Z 10 1x0[� exp(�x)℄ dx

A.13. AUFGABEN ZU KAPITEL 13 367= Z 10 exp(�x) dx = 1= 1 � �(1) = 1 � 1 = 1 = 1!�(3) = Z 10 x2 exp(�x) dx = [�x2 exp(�x)℄10 � Z 10 2x1[� exp(�x)℄ dx= 2 Z 10 x exp(�x) dx = 2= 2 � �(2) = 2 � 1 = 2 = 2!A.13 Aufgaben zu Kapitel 131. (Di�erentialglei hung) Wir betra hten die Di�erentialglei hungddtx(t) = �x3 + 4x(a) Ma hen Sie si h ein Bild von der Funktion f(x) = �x3 + 4x. F�uhren Siedazu eine kurze Kurvendiskussion dur h: Verhalten f�ur x ! �1, Symmetrie,Nullstellen, 1. Ableitung und Extremstellen, Skizze.f(x) = �x3 + 4x = x � (4� x2) = x(2� x)(2 + x) dritte binomis he Formellimx!�1 f(x) = �1 ) h�o hste Potenz ist ungerade mit negativem VZDie Funktion ist ungerade (es kommen nur ungerade Potenzen von x vor)f(�x) = �(�x)3 + 4(�x) = x3 � 4x = �(�x3 + 4x) = �f(x) .Nullstellen bei 0; �2 (aus der faktorisierten Darstellung oben sofort ablesbar)f 0(x) = �3x2 + 4 ) f 0(x) = 0, x2 = 43, x = � 2p3= �23p3f 00(x) = �6x ) WP bei (0; 0) und lokale Minima bei � 2p3 und Maxima bei2p3 .(b) Wie lauten die station�aren L�osungen der Di�erentialglei hung?Bedingung f�ur station�are L�osung: ddtx(t) = 0, f(x) = 0x1(t) = �2; x2(t) = 0; x3(t) = 2 jeweils f�ur alle Zeiten konstant( ) �Uberlegen Sie si h mit Hilfe der Skizze von f(x), wie die L�osungen x(t) der Dif-ferentialglei hung qualitativ aussehen werden. Sind die station�aren L�osungenstabil oder instabil? Skizzieren Sie die L�osungen x(t) mit den Anfangswertenx0 = �4;�1; 1; 4.

368 ANHANG A. L �OSUNGEN DER AUFGABEN−3 −2 −1 0 1 2 3
−15
−10
−5
0
5
10
15
x
f(x)
0 0.5 1 1.5 2 2.5 3−4
−3
−2
−1
0
1
2
3
4
t
x(t)
Abbildung A.40: Links: Graph der Funktion f(x) = �x3+4x ; re hts: L�osungen zuvers hiedenen Anfangswertenddtx(t) > 0, x nimmt zu , f(x) > 0, x < �2 oder 0 < x < 2ddtx(t) < 0, x nimmt ab , f(x) < 0, x > 2 oder � 2 < x < 0(d) Wiederholen Sie die Aufgabenteile (a) bis ( ) f�ur die Di�erentialglei hungddtx(t) = x3 � 4x und f(x) = x3 � 4x :Asymptotik: limx!�1 f(x) = �1Nullstellen wie zuvor (0;�2) ;f(�x) = �f(x) ! Symmetrie wie zuvor;Extremstellen glei h, aber Maximum und Minimum vertaus htstation�are L�osungen sind wie zuvor x1(t) = �2; x2(t) = 0; x3(t) = 2;aber nun sind x1(t) und x3(t) instabil und x2(t) stabil.−3 −2 −1 0 1 2 3
−15
−10
−5
0
5
10
15
x
f(x)
0 0.5 1 1.5 2−10
−5
0
5
10
t
x(t)
Abbildung A.41: Links: Graph der Funktion f(x) = x3 � 4x ; re hts: L�osungen zuvers hiedenen Anfangswerten2. (Di�erentialglei hungen) Gegeben ist folgende Di�erentialglei hung:ddtx(t) = �2t � x

A.13. AUFGABEN ZU KAPITEL 13 369(a) Wie unters heidet sie si h prinzipiell von denen aus der vorherigen Aufgabe?ddtx = �2t � x = g(t) � f(x) mit x = x(t)Zuvor war die re hte Seite ni ht explizit von t abh�angig, sondern nur implizitdur h die t-Abh�angigkeit von x.(b) Geben Sie die station�are L�osung der Di�erentialglei hung an, falls eine existiert.Bedingung f�ur station�are L�osung:ddtx = 0 f�ur alle t) �2t � x = 0 f�ur alle t) x = x(t) = 0 f�ur alle t( ) Wie hei�t das Verfahren um eine sol he Di�erentialglei hung zu l�osen?Diese DGL kann dur h Trennung oder Separation der Variablen gel�ost werden.(d) Bere hnen Sie die allgemeine L�osung der Di�erentialglei hung!ddtx = �2t � x) dxx = �2t dt) Z x(t)x(t0) dxx = �2 Z tt0 ~t d~t, [ln(jxj)℄x(t)x(t0) = �[~t2℄tt0, ln� x(t)x(t0)� = �t2 + t20) x(t) = x(t0)et20�t2Der Betrag f�allt weg, da x(t)x(t0 immer gr�o�er Null ist, weil x = 0 station�areL�osung ist und damit x(t) nie das Vorzei hen we hselt.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
3.5
4
t
x(t)
Abbildung A.42: Die L�osung f�ur t � 0 einmal f�ur x0 = 1 sowie f�ur x0 = 3.

370 ANHANG A. L �OSUNGEN DER AUFGABEN3. (Di�erentialglei hungen) Aus dem Wintersemester kennen Sie die logistis heDi�erentialglei hung dxdt = ax� bx2 (1.19)als Modell f�ur eine Population mit begrenztem Wa hstum. L�osen Sie nun die Glei- hung (1.19) f�ur beliebige Anfangspopulationen, d.h. zur Zeit t0 sei x(t0) = x0.Gehen Sie dazu wie folgt vor:(a) Formen Sie die Glei hung dur h Trennung der Variablen in einen Integralaus-dru k um.(b) Bere hnen Sie das Integral �uber x mit Hilfe der Substitution y = 1=x . Waserhalten Sie damit letztendli h f�ur x(t)?( ) Diskutieren Sie die Funktionx(t) = ab� �b� ax0� exp[�a(t� t0)℄ (1.20)f�ur Zeiten t � t0 . Was ergibt si h im Grenzfall b = 0?L�osung:(a) Aus dxdt = ax� bx2 folgt dxax� bx2 = dt und daherZ x(t)x(t0) dxax� bx2 = Z tt0 dt = t� t0 :(b) Mit der Substitution y(x) = 1x ) dydx = � 1x2 und y0 = 1=x0 sowie y(t) =1=x(t)) Z x(t)x(t0) 1b� a=x|{z}ay ��� 1x2� dx| {z }dy = Z y(t)y0 1b� ay dyDieses Integral ist von der glei hen Form wie in der folghenden Aufgabe, folgli hergibt si h f�ur y(t) dieselbe L�osung wie dort f�ur x(t) , nur muss nun f�ur die endg�ultigeL�osung r�u ksubstituiert werden, um x(t) zu erhalten )x(t) = ab 11� (1� abx0 ) exp[�a(t� t0)℄ :( ) Die zu diskutierende Funktion ist gerade die eben gefundene L�osung.(1.) Nullstellen: F�ur t � t0 und a; b; x0 > 0 ist x(t) o�ensi htli h immer gr�o�er alsNull ) keine Nullstellen f�ur t � t0.(2.) Extremwerte: Notwendige Bedingung: _x = 0 . Da x(t) der Di�erentialglei hung(1.19) gen�ugt, ist _x = ax � bx2 = (a � bx)x . Da x(t) keine Nullstellen hat (siehe(1.)), ist die Forderung _x = 0 �aquvalent zu a� bx(t) = 0, x(t) = a=b,ab = ab 11� (1� abx0 ) exp[�a(t� t0)℄ ,1 = 11� (1� abx0 ) exp[�a(t� t0)℄ ,

A.13. AUFGABEN ZU KAPITEL 13 3711 = 1� (1� abx0 ) exp[�a(t� t0)℄ ,0 = (1� abx0 ) exp[�a(t� t0)℄ :Die Exponentialfunktion wird niemals Null, daher muss 1� abx0 = 0 sein, ) x0 =a=b . Dies ist aber genau der Fixpunkt der Di�erentialglei hung (1.19) ) f�ur x0 =a=b ist die L�osung konstant ) x(t) hat keine Extremwerte.(3.) Wendepunkte: Notwendige Bedingung: �x = 0 . Wieder folgt aus der Di�erenti-alglei hung und der Kettenregel�x = a _x� 2bx _x = (a� 2bx) _x :Dieses Produkt ist Null, wenn entweder x(t) = a2b oder _x = 0 . Der letzte Fallf�uhrt wieder auf die Fixpunktl�osung, die si her keinen Wendepunkt hat (aber derenzweite Ableitung identis h vers hwindet), weil sie konstant ist. Der erste Fall f�uhrtauf a2b = ab 11� (1� abx0 ) exp[�a(t� t0)℄ ,12 = 11� (1� abx0 ) exp[�a(t� t0)℄ ,2 = 1��1� abx0� exp[�a(t� t0)℄ ,1 = � abx0 � 1� exp[�a(t� t0)℄ ,exp[a(t� t0)℄ = abx0 � 1 ,t = t0 + 1a ln� abx0 � 1�Diese Zeit t ist nur dann gr�o�er als t0 , falls ln� abx0 � 1� > 0 , abx0 � 1 > 1 ,abx0 > 2 , x0 < a2b ) F�ur x0 < a2b hat x(t) einen Wendepunkt zur Zeit tWP =t0 + 1a ln� abx0 � 1� mit x(tWP) = a2b .
0 1 2 3 40
0.5
1
1.5
2
t/a
x(t)
/(a/
b)
Abbildung A.43: Skizze der L�osung zu vers hiedenen AnfangswertenF�ur b = 0 ist _x = ax) x(t) = x0ea(t�t0) ) unbegrenztes exponentielles Wa hstum.

372 ANHANG A. L �OSUNGEN DER AUFGABENA.14 Aufgaben zu Kapitel 141. (Lineare Di�erentialglei hungen) Ein Medikament wird einem Patienten mit kon-stanter Rate r (in Gramm/Sekunde) �uber eine Infusion zugef�uhrt. Glei hzeitig wirdes vom K�orper proportional der vorhandenen Menge x(t) mit Proportionalit�atskon-stante � abgebaut.(a) Stellen sie eine Di�erentialglei hung _x = f [x(t)℄ f�ur x(t) auf.(b) Skizzieren sie f(x) .( ) Wel he Fixpunkte hat die Di�erentialglei hung?(d) Diskutieren sie ihre Stabilit�at (lineare Stabilit�atsanalyse).(e) L�osen sie die Di�erentialglei hung zun�a hst f�ur beliebige Anfangswerte x(t0) =x0 mit t0 = 0 dur h Trennung der Variablen und zei hnen sie dann x(t) f�ur diespeziellen Anfangswerte (i) x0 = 0 ; (ii) x0 = r� ; (iii) x0 = 2 r� :(f) Verglei hen sie Ihre Ergebnisse mit denen von der Medikamentenaufgabe inKapitel 6. Was war dort anders, was war glei h?L�osung:(a) _x = (Zufuhr) - (Abnahme) = r � �x , also f(x) = r � �x .��x: Abbau der Medikamentenmenge, daher negativ; r: Medikamentenmenge, diest�andig hinzukommt(b) Skizze: siehe Abbildung A.44 (links)( ) Fixpunktbedingung: f(x�) = 0, r � �x� = 0, x� = r�(d) Lineare Stabilit�atsanalyse des FixpunktesAnsatz: Starte in der N�ahe des Fixpunktes, d.h. x(t) = r� + y(t)Frage: Wird die St�orung y(t) nun kleiner oder gr�o�er? In der Vorlesung wurdegezeigt (mittels Taylorentwi klung um den Fixpunkt bis zur linearen Ordnung),dass y(t) die Di�erentialglei hung _y = f(x�) �y erf�ullt,) wenn f 0(x�) < 0 wird x(t)zum Fixpunkt zur�u kkehren. Hier ist f 0(x�) = �� < 0 ) Der Fixpunkt ist stabil.(e) Die Di�erentialglei hung dxdt = r��x kann separiert werden, d.h. man kann dievon x und die von t abh�angigen Gr�o�en auf vers hiedene Seiten des Glei hheitszei- hens bringen. 1r � �x dx = dt) Z x(t)x(t0) 1r � �xdx = Z tt0 dt = t� t0 = tDas verbleibende Integral kann mit der Substitution u(x) = r � �x ) u0 = �� )��dx = du gel�ost werden� 1� Z x(t)x0 1r � �x| {z }u�1 � (��) dx| {z }du = � 1� Z r��x(t)r��x0 u�1du = � 1� [ln juj℄r��x(t)r��x0= � 1� [ln jr � �x(t)j � ln jr � �x0j℄
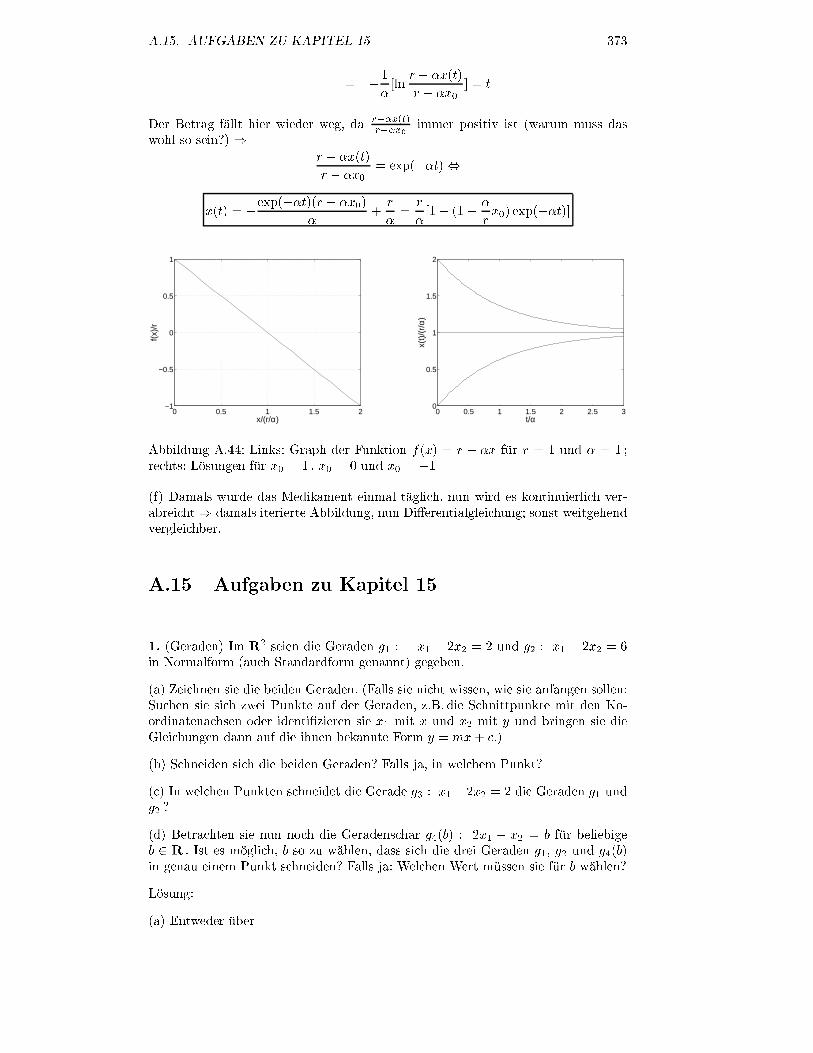
A.15. AUFGABEN ZU KAPITEL 15 373= � 1� [ln r � �x(t)r � �x0 ℄ = tDer Betrag f�allt hier wieder weg, da r��x(t)r��x0 immer positiv ist (warum muss daswohl so sein?) ) r � �x(t)r � �x0 = exp(��t),x(t) = �exp(��t)(r � �x0)� + r� = r� [1� (1� �r x0) exp(��t)℄0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
x/(r/α)
f(x)
/r
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
t/αx(
t)/(
r/α)
Abbildung A.44: Links: Graph der Funktion f(x) = r � �x f�ur r = 1 und � = 1 ;re hts: L�osungen f�ur x0 = 1 , x0 = 0 und x0 = �1(f) Damals wurde das Medikament einmal t�agli h, nun wird es kontinuierli h ver-abrei ht) damals iterierte Abbildung, nun Di�erentialglei hung; sonst weitgehendverglei hber.A.15 Aufgaben zu Kapitel 151. (Geraden) Im R2 seien die Geraden g1 : �x1 + 2x2 = 2 und g2 : x1 + 2x2 = 6in Normalform (au h Standardform genannt) gegeben.(a) Zei hnen sie die beiden Geraden. (Falls sie ni ht wissen, wie sie anfangen sollen:Su hen sie si h zwei Punkte auf der Geraden, z.B. die S hnittpunkte mit den Ko-ordinatena hsen oder identi�zieren sie x1 mit x und x2 mit y und bringen sie dieGlei hungen dann auf die ihnen bekannte Form y = mx+ .)(b) S hneiden si h die beiden Geraden? Falls ja, in wel hem Punkt?( ) In wel hen Punkten s hneidet die Gerade g3 : x1� 2x2 = 2 die Geraden g1 undg2 ?(d) Betra hten sie nun no h die Geradens har g4(b) : 2x1 � x2 = b f�ur beliebigeb 2 R . Ist es m�ogli h, b so zu w�ahlen, dass si h die drei Geraden g1, g2 und g4(b)in genau einem Punkt s hneiden? Falls ja: Wel hen Wert m�ussen sie f�ur b w�ahlen?L�osung:(a) Entweder �uber

374 ANHANG A. L �OSUNGEN DER AUFGABENg1 : 2x2 = 2 + x1 , x2 = 12x1 + 1g2 : 2x2 = �x1 + 6 , x2 = �12x1 + 3oder �uber die S hnittpunkte mit den Koordinatena hsen:g1: 1. S hnittpunkt mit x1-A hse: x2 = 0) �x1 = 2) x1 = �2) P11(�2; 0)2. S hnittpunkt mit x2-A hse: x1 = 0) 2x2 = 2) x2 = 1) P12(0; 1);g2: 1. S hnittpunkt mit der x1-A hse: x2 = 0) x1 = 6) P21(6; 0);2. S hnittpunkt mit x2-A hse: x1 = 0) 2x2 = 6) x2 = 3) P22(0; 3)(b) re hneris he Ermittlung des S hnittpunktes:g1 : �x1 + 2x2 = 2 und g2 : x1 + 2x2 = 6 g1+g2=) 4x2 = 8) x2 = 2) S(2; 2)( ) g3 : x1 � 2x2 = 2Gerade g1 und g3 haben die glei he Steigung. Haben Geraden die glei he Steigung,sind sie entweder parallel oder identis h.Eins hub: Aus der S hule kennen sie viellei ht die Normalform einer Gerade in R2in der Form ~n � ~x = b mit dem Normalenvektor ~n . Hier alsog1 : (�1; 2)�x1x2� = 2 und g3 : (1;�2)�x1x2� = 2) ~n1 = �~n3 .Die Normalenvektoren ~n1 und ~n3 sind somit kolinear. Damit sind die Geradenparallel oder identis h.Bere hnung des S hnittpunktes von g1 mit g3:Mit g1 : �x1 + 2x2 = 2 und g3 : x1 � 2x2 = 2 folgt aus g1 + g3, dass 0 = 4 seinm�usste ) Es gibt keinen S hnittpunkt ) g1 und g3 sind parallel.Bere hnung des S hnittpunktes von g2 mit g3:g2 : x1+2x2 = 6 und g3 : x1�2x2 = 2) (g2+g3) : 2x1 = 8) x1 = 4) 4+2x2 =
0 1 2 3 4−2
−1
0
1
2
3
4
5
6
x1
x 2
g1
g2
g3
g4
Abbildung A.45: Skizze zu Kapitel 15, Aufgabe 1

A.15. AUFGABEN ZU KAPITEL 15 3756) 2x2 = 2) x2 = 1) S(4; 1) .(d) g4(b) : 2x1 � x2 = bDa g1 und g2 den S hnittpunkt (2; 2) haben, muss g4(b) dur h diesen Punkt gehen.Setzt man x1 = 2 und x2 = 2 in g4(b) ein, so erh�alt man f�ur b den Wert 2.2. (Geraden) Im R2 seien die Punkte P1 = (�1; 2) und P2 = (2; 0) gegeben.(a) Geben sie die Glei hung einer Geraden g1 in Normalform (a11x1 + a12x2 = b1)an, die dur h P1 und P2 verl�auft.(b) Wie lautet die Glei hung der Geraden g2 : a21x1 + a22x2 = b2 , die parallel zug1 dur h den Ursprung (0; 0) verl�auft.( ) Finden sie nun die Glei hung einer Geraden g3 : a31x1 + a32x2 = b3 , diesenkre ht zu g2 ebenfalls dur h den Ursprung verl�auft. �Uberlegen sie si h dazu,warum f�ur die KoeÆzienten aij der beiden Geraden a21a31 + a22a32 = 0 geltenmuss.(d) In wel hem Punkt s hneiden si h die Geraden g1 und g3 ? Sie haben nun von allenPunkten auf der Gerade g1 denjenigen gefunden, der bez�ugli h der Euklidis henNorm j~xj = qP2i=1 x2i den k�urzesten Abstand zum Ursprung hat. Dies de�niertau h den Abstand der Geraden g1 vom Ursprung. Wel hen Abstand hat also g1vom Ursprung?L�osung:(a) P1 in g1 eingesetzt, liefert �a11+2a12 = b1 (1), und P2 eingesetzt, ergibt 2a11 =b1 (2). Dies sind zwei Glei hungen f�ur drei Unbekannte, also ein unterbestimmtesGlei hungssystem. Daher kann eine Variable frei gew�ahlt werden, z.B. a11 = 2 .Dann folgt aus (2) b1 = 4 und aus (1) a12 = 3 , zusammen also g1 : 2x1 + 3x2 = 4 .Bemerkung: a11 wurde hier so gew�ahlt, dass si h die kleinstm�ogli hen ganzzahligenKoeÆzienten ergeben. Jede andere Wahl w�are aber genauso zul�assig. Oft nutztman diese Freiheit au h, um den Normalenvektor ~n1 = (a11; a12) in ~n1 � ~x = b1 zunormieren, weil dann b1 den Abstand der Geraden g1 vom Ursprung angibt (s.u.).(b) Den Punkt (0; 0) in g2 eingesetzt, ergibt b2 = 0 . Damit g2 parallel zu g1 ist,m�ussen beide Geraden die glei he Steigung bzw. parallele Normalenvektoren haben) g2 zu 2x1 + 3x2 = 0 .( ) Wenn g2 und g3 senkre ht aufeinander stehen, dann au h ihre Normalenvektoren~n2 = (a21; a22) und ~n3 = (a31; a32) , d.h. dass das Skalarprodukt ~n2 �~n3 vers hwindenmuss ) a21a31 + a22a32 = 0 . Da ~n2 = (2; 3) ) 2a31 + 3a32 = 0 . Dies wird (z.B.)von ~n3 = (�3; 2) erf�ullt (nat�urli h au h von allen skalaren Vielfa hen davon) ) g3zu �3x1 + 2x2 = b3 . Da g3 ebenfalls dur h (0; 0) gehen soll, ist b3 = 0 ) g3 zu�3x1 + 2x2 = 0(d) Der S hnittpunkt von g1 : 2x1 + 3x2 = 4 und g3 : �3x1 + 2x2 = 0 ergibt si h�uber (3 � g1+2 � g2)) 13x2 = 12) x2 = 1213 ) x1 = 813 zu S( 813 ; 1213 ) . Dieser Punkthat vom Ursprung den Abstands =s� 813�2 + �1213�2 = 113p82 + 122 = 113[(2 � 4)2 + (3 � 4)2℄ 12 = 413p13 :Bemerkung: Alternativ kann man den Abstand einer Gerade vom Ursprung au h

376 ANHANG A. L �OSUNGEN DER AUFGABENdur h Normierung des Normalenvektors bestimmen. F�ur g1 : ~n1 � ~x = (2; 3) � ~x = 4ist j~nj = p13) der Abstand zu s = 4=j~nj = 4=p13 = 413p13 wie zuvor.3. (Ebenen) Gegeben sei die Ebene e1 in R3, die die von der x1{A hse und derx2{A hse aufgespannte Ebene in der Geraden x1 + x2 = 2, die von der x1{A hseund der x3{A hse aufgespannte Ebene in der Geraden x1 + x3 = 2 und die vonder x2{A hse und der x3{A hse aufgespannte Ebene in der Geraden x2 + x3 = 2s hneidet.(a) Finden sie eine Glei hung in Normalform f�ur e1 .Weiter seien die Ebenen e2 : �2x1 + x2 � x3 = 4 und e3 : x1 � x3 = 1 gegeben.(b) Bestimmen sie den S hnittpunkt der drei Ebenen mittels Gau�elimination. Soll-ten sie in (a) keine L�osung gefunden haben, so verwenden sie f�ur e1 : x1+x2+x3 = 2.L�osung:(a) Die S hnittpunkte mit den Koordinatena hsen ergeben si h ausx1 + x2 = 2 x2=0=) x1 = 2 sowie x1=0=) x2 = 2 und aus x1 + x3 = 2 x1=0=) x3 = 2zu P1(2; 0; 0) ; P2(0; 2; 0) und P3(0; 0; 2) .Diese Punkte kann man nun in a11x1 + a12x2 + a13x3 = b einsetzen )P1 : 2a1 = b ) a1 = b=2P2 : 2a2 = b ) a2 = b=2P3 : 2a3 = b ) a3 = b=2)zusammen also b2 (x1 + x2 + x3) = b �2=b=) e1 : x1 + x2 + x3 = 2 .(b) Zu l�osen ist das lineare Glei hungssystem(I) x1 + x2 + x3 = 2(II) �2x1 + x2 � x3 = 4(III) x1 � x3 = 1Dies ist �aquivalent zu(I0) x1 + x2 + x3 = 2(II0) 3x2 + x3 = 8 (II0 = 2 � I + II)(III0) x2 + 2x3 = 1 (III0 = I� III)Dies ist wiederum �aquivalent zu(I00) x1 + x2 + x3 = 2(II00) 3x2 + x3 = 8(III00) 5x3 = �5 (III00 = 3 � III0 � II0)Aus (III") folgt x3 = �1 , damit in (II") folgt x2 = 3 und damit aus (I) letztli hx1 = 0 . Zusammen ergibt si h der S hnittpunkt zu S(0; 3;�1) .

A.15. AUFGABEN ZU KAPITEL 15 3774. (Lineare Glei hungen) Gegeben sei das homogene lineare Glei hungssystemx1 + 2x2 + 3x3 = 0 ;4x1 + 5x2 + 6x3 = 0 ;7x1 + 8x2 + 9x3 = 0 :(a) Zeigen sie, dass dieses System keine Punktl�osung, sondern eine Punktmenge alsL�osung hat.(b) Bestimmen sie die L�osungsmenge.L�osung:(a) Das Glei hungssystem(I) x1 + 2x2 + 3x3 = 0(II) 4x1 + 5x2 + 6x3 = 0(III) 7x1 + 8x2 + 9x3 = 0ist �aquivalent zu(I0) x1 + 2x2 + 3x3 = 0(II0) 3x2 + 6x3 = 0 (II0 = 4 � I� II)(III0) 6x2 + 12x3 = 0 (III0 = 7 � I� III)Die letzten beiden Glei hungen sind redundant, denn(III00) 0 = 0 (III00 = 2 � II0 � III0)daher hat das Glei hungssystem keine Punktl�osung, sondern eine Punktmenge (hiereine Gerade) als L�osung.(b) Eine der Variablen kann als freier Parameter gew�ahlt werden, z.B.x3 =: t aus II'=) x2 = �2t aus I=) x1 = t ) ~x = 0BB� 1�21 1CCA t .5. (Inhomogene Glei hungssysteme) Gegeben sei das inhomogene lineare Glei hungs-system 0BB� 1 �2 p 01 �2 0 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 12�1 1CCAin Abh�angigkeit des Parameters p aus R.(a) L�osen sie das Glei hungssystem f�ur p = 2 mittels Gau�elimination.(b) L�osen sie das Glei hungssystem f�ur p = 1 mittels Gau�elimination. F�allt Ihnenetwas auf?( )� L�osen sie das Glei hungssystem f�ur beliebiges p .L�osung:

378 ANHANG A. L �OSUNGEN DER AUFGABEN(a) Das Glei hungssystem f�ur p = 20BB� 1 �2 2 01 �2 0 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 12�1 1CCAist �aquivalent zu (2. Zeile minus 1. Zeile):0BB� 1 �2 2 00 0 �2 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 11�1 1CCADies ist �aquivalent zu (3. Zeile plus 1=2 mal 2. Zeile):0BB� 1 �2 2 00 0 �2 �10 0 0 1=2 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 11�1=2 1CCAAus der 3. Zeile folgt somit: x4 = �1.Eingesetzt in die 2. Zeile ergibt si h: x3 = 0.Somit liefert die 1. Zeile: x1 = 2x2 + 1.Daher hat das Glei hungssystem keine Punktl�osung, sondern eine Punktmenge (hiereine Gerade) als L�osung. Eine der Variablen x1 oder x2 kann als freier Parametergew�ahlt werden, z.B. x2 =: t.(b) Das Glei hungssystem f�ur p = 10BB� 1 �2 1 01 �2 0 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 12�1 1CCAist �aquivalent zu (2. Zeile minus 1. Zeile):0BB� 1 �2 1 00 0 �1 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 11�1 1CCADie letzten beiden Glei hungen sind redundant, denn mittels (2. Zeile plus 3. Zeile)folgt: 0BB� 1 �2 1 00 0 �1 �10 0 0 0 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 110 1CCADaher hat das Glei hungssystem wieder eine Punktmenge als L�osung.Aus der 3. Zeile folgt: x3 = �x4 � 1.

A.16. AUFGABEN ZU KAPITEL 16 379Eine der Variablen kann als freier Parameter gew�ahlt werden, z.B. x4 =: s.Damit folgt aus der 1. Zeile: x1 = 2x2 + s + 2. Daher kann eine weitere Variable(z.B. x2 =: t) als freier Parameter gew�ahlt werden.Somit stellt die L�osung geometris h ein Hyperebene im vierdimensionalen Raumdar.( ) Das Glei hungssystem f�ur beliebiges p0BB� 1 �2 p 01 �2 0 �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 12�1 1CCAist �aquivalent zu (2. Zeile minus 1. Zeile):0BB� 1 �2 p 00 0 �p �10 0 1 1 1CCA �0BBBB� x1x2x3x4 1CCCCA = 0BB� 11�1 1CCADies ist �aquivalent zu (Vertaus hung von 3. und 4. Spalte):0BB� 1 �2 0 p0 0 �1 �p0 0 1 1 1CCA �0BBBB� x1x2x4x3 1CCCCA = 0BB� 11�1 1CCADies ist �aquivalent zu (3. Zeile plus 2. Zeile):0BB� 1 �2 0 p0 0 �1 �p0 0 0 1� p 1CCA �0BBBB� x1x2x4x3 1CCCCA = 0BB� 110 1CCAAus der 3. Zeile ergibt si h f�ur p 6= 1: x3 = 0, ansonsten ist die 3. Zeile f�ur allex3 2 R erf�ullt.F�ur p 6= 1 ergibt si h aus der 2. Zeile: x4 = �1. F�ur p = 1 kann eine der Variablender 2. Zeile als freier Parameter gew�ahlt werden, also z.B. x3 =: s.Somit ist x4 = �ps� 1F�ur p 6= 1 folgt no h aus der 1. Zeile: x1 = 2x2 + 1, womit in diesem Fall z.B. x2als freier Parameter gew�ahlt werden kann.Andernfalls ergibt si h aus der 1. Zeile: x1 = 2x2�ps+1. x2 kann als weiterer freierParameter gew�ahlt werden.A.16 Aufgaben zu Kapitel 161. (Re henregeln f�ur Matrizen) Gegeben seien die Matrizen A = 2 31 �2 !, B =

380 ANHANG A. L �OSUNGEN DER AUFGABEN 1 33 �7 ! , C = 2 �1 03 1 1 ! und D = 0BB� 4 1�2 21 3 1CCA .Bere hnen sie (falls de�niert):(a) AT , BT , CT , DT . Wel he der Matrizen sind symmetris h?(b) A+B , B� 2A , A+C , C+D , 3CT +D .( ) AB�BA , AC , CA , CTA , CD , DC , CD�DC .L�osung:(a) AT = 2 13 �2 ! 6= A BT = 1 33 �7 ! = B) B ist symmetris hCT = 0BB� 2 3�1 10 1 1CCA 6= C DT = 4 �2 11 2 3 ! 6= D(b) A+B = 2 + 1 3 + 31 + 3 �2� 7 ! = 3 64 �9 !B� 2A = 1� 2 � 2 3� 2 � 33� 2 � 1 �7� 2 � (�2) ! = �3 �31 �3 !A+C ist ni ht de�niert, da A eine 2� 2 und C eine 2� 3 Matrix ist.C+D ist ebenfalls ni ht de�niert.3CT +D = 0BB� 6 9�3 30 3 1CCA+0BB� 4 1�2 21 3 1CCA = 0BB� 10 10�5 �51 6 1CCA( ) AB = 2 31 �2 ! � 1 33 �7 ! = 2 � 1 + 3 � 3 2 � 3 + 3 � (�7)1 � 1 + (�2) � 3 1 � 3 + (�2) � �7 != 11 �15�5 17 !BA = 1 33 �7 ! � 2 31 �2 ! = 5 �3�1 23 ! )AB�BA = 11 �15�5 17 !� 5 �3�1 23 ! = 6 �12�4 �6 !AC = 2 31 �2 ! 2 �1 03 1 1 ! = 13 1 3�4 �3 �2 !C �A ist ni ht de�niert, da die Zahl der Spalten von C mit der Zahl der Zeilen von

A.16. AUFGABEN ZU KAPITEL 16 381A ni ht �ubereinstimmt.CTA = 0BB� 2 3�1 10 1 1CCA 2 31 �2 ! = 0BB� 7 0�1 �51 �2 1CCACD = 2 �1 03 1 1 !0BB� 4 1�2 21 3 1CCA = 10 011 8 !DC = 0BB� 4 1�2 21 3 1CCA 2 �1 03 1 1 ! = 0BB� 11 �3 12 4 211 2 3 1CCACD�DC ist ni ht de�niert, da CD eine 2� 2 und DC eine 3� 3 Matrix ist.2. (Matrizen) Eine Matrix P , die die Glei hung P = P � P = P2 erf�ullt, wirdProjektionsmatrix genannt. (K�onnen sie si h vorstellen, warum man Matrizen mitdieser Eigens haft so nennt?)(a) Wel he der folgenden Matrizen sind Projektionsmatrizen?(i) A = 1 00 0 ! (ii) 2A , (iii) B = 1 22 �1 ! , (iv) 03 = 0BB� 0 0 00 0 00 0 0 1CCA , (v)En .(b) F�ur wel he �; � aus R ist � 00 � ! eine Projektionsmatrix?( ) F�ur wel hes a aus R ist a aa a ! eine Projektionsmatrix?(d) Verans hauli hen sie si h die Wirkung der in (b) und ( ) gefundenen Matrizen,indem sie sie mit dem Vektor ~x = x1x2 ! multiplizieren.L�osung:(a) A2 = 1 00 0 ! � 1 00 0 ! = 1 00 0 ! = A ) A ist Projektionsmatrix(2A)2 = 4A2 = 4 1 00 0 ! 6= 2 1 00 0 ! = 2A ) 2A ist keineProjektionsmatrixB2 = 1 22 �1 ! = 5 00 5 ! 6= B ) B ist keine Projektionsmatrix

382 ANHANG A. L �OSUNGEN DER AUFGABEN023 = 0BB� 0 0 00 0 00 0 0 1CCA �0BB� 0 0 00 0 00 0 0 1CCA = 0BB� 0 0 00 0 00 0 0 1CCA = 03 ) 03 istProjektionsmatixE2n = 0BB� 1 � � � 0... . . . ...0 � � � 1 1CCA �0BB� 1 � � � 0... . . . ...0 � � � 1 1CCA = 0BB� 1 � � � 0... . . . ...0 � � � 1 1CCA = En )En ist f�ur allen 2 N Projekti-onsmatrix(b) � 00 � ! � 00 � ! = �2 00 �2 ! = � 00 � !) (I) �2 = �) � = 0 oder 1 (II) �2 = �) � = 0 oder 1 )Es gibt vier L�osungen: 0 00 0 ! ; 1 00 1 ! ; 1 00 0 ! und 0 00 1 ! :( ) a aa a ! = a 1 11 1 ! und 1 11 1 !� 1 11 1 ! = 2 22 2 ! = 2 1 11 1 !)"a 1 11 1 !#2 = 2a2 1 11 1 ! = a 1 11 1 !) 2a2 = a)F�ur a = 0 und f�ur a = 1=2 hat man Projektionsmatrizen.(d) 0 00 0 !�x1x2� = �00� Projektion auf Ursprung 1 00 1 !�x1x2� = �x1x2� Identit�at 1 00 0 !�x1x2� = �x10 � Projektion auf x1{A hse 0 00 1 !�x1x2� = � 0x2� Projektion auf x2{A hse12 1 11 1 !�x1x2� = 12�x1 + x2x1 + x2� Projektion auf die Winkelhalbierende3. (Matrizen) Im Wintersemester haben sie gelernt, dass man si h die Multiplika-tion einer komplexen Zahl mit einer weiteren komplexen Zahl als Drehstre kungverans hauli hen kann (siehe Abbildung 2 in Kapitel 10 des Skriptums).Versu hen sie nun eine Matrix zu �nden, die die Multiplikation mit einer komplexenZahl z1 = jz1j exp[iarg (z1)℄ in der Gau�s hen Zahlenebene bes hreibt.

A.16. AUFGABEN ZU KAPITEL 16 383Genauer: Mit wel her Matrix Z1 m�ussen sie die komplexe Zahl z2 = x2y2 ! mul-tiplizieren, um z3 = z1z2 = Z1z2 = x3y3 ! zu erhalten? Dabei bezei hnen xi undyi jeweils den Real- und Imagin�arteil der komplexen Zahl zi .1. L�osung: In kartesis hen Koordinaten istz3 = �x3y3� = z1 � z2 = �Re[(x1 + iy1)(x2 + iy2)℄Im[(x1 + iy1)(x2 + iy2)℄� = �x1x2 � y1y2y1x2 + x1y2�) �x3y3� = a b d !| {z }=:Z1 �x2y2� = �ax2 + by2 x2 + dy2� = �x1x2 � y1y2y1x2 + x1y2�) Z1 = x1 �y1y1 x1 !2. L�osung: In Polarkoordinaten ist z1 = r1 �exp(i'1) mit r1 = jz1j und '1 = arg (z1) .Eine Multuiplikation mit z1 entspri ht einer Drehung um '1 mit ans hlie�enderStre kung/ Stau hung um den Faktor r1 ) Z1 = r1 os('1) � sin('1)sin('1) os('1) ! .4. (Matrizen) Funktionen von Matrizen: Funktionen, die als Potenzreihe dar-gestellt werden k�onnen (f(x) =P1k=0 akxk), lassen si h au h f�ur quadratis he Ma-trizen als Argument de�nieren, indem man einfa h die Matrix anstelle von x in diePotenzreihe einsetzt. (Die Beziehung x0 = 1 verallgemeinert si h zu A0 = En f�urn� n Matrizen A.)Gegeben seien die Matrizen A = 1 00 2 ! , B = �1 00 �2 ! , mit �1;2 2 R undC = 0 �=30 0 ! .(a) Bere hnen sie f(A) , f(B) und f(C) f�ur (i) f(x) = x2 und (ii) f(x) = x� x3 .(b) Bere hnen sie f�ur A , B und C die Exponentialfunktion, den Sinus und denCosinus.( ) Bere hnen sie exp 0 ii 0 ! .L�osung:(a) Es ist A2 = 12 00 22 ! = 1 00 4 ! ; B2 = �21 00 �22 ! und C2 = 0 00 0 ! :) A�A3 = A(E2�A2) = 0 00 �6 ! ; B�B3 = �1 � �31 00 �2 � �32 !und C�C3 = C .(b) Mit exp(x) = 1Xk=0 1k!xk und Ak = 1k 00 2k ! (da A Diagonalform hat) folgt

384 ANHANG A. L �OSUNGEN DER AUFGABENexp(A) = 1Xk=0 1k! 1k 00 2k ! = P1k=0 1kk! 00 P1k=0 2kk! ! = exp(1) 00 exp(2) ! = e 00 e2 ! .Genauso erh�alt man aus sin(x) = 1Xk=0 (�1)k(2k + 1)x2k+1sin(A) = 1Xk=0 (�1)k2k + 1!A(2k+1) = 1Xk=0 (�1)k(2k + 1)! 12k+1 00 22k+1 != P1k=0 (�1)k(2k+1)!12k+1 00 P1k=0 (�1)k(2k+1)!22k+1 ! = sin(1) 00 sin(2) ! :Analog folgt os(A) = os(1) 00 os(2) ! :Und genauso:exp(B) = exp(�1) 00 exp(�2) ! ; sin(B) = sin(�1) 00 sin(�2) ! und os(B) = os(�1) 00 os(�2) ! :Anders ist die Situation bei C, denn hier ist Ck = 0 ab k � 2) in der Potenzreihesind nur die Konstanten und die linearen Terme von 0 vers hieden )exp(C) = E2 +C = 1 �30 1 ! ; sin(C) = C und os(C) = E2 .( ) Sei M = 0 ii 0 ! )M2 = 0 ii 0 ! 0 ii 0 ! = i2 00 i2 ! = �1 00 �1 ! = (�1) 1 00 1 !Weiter ist M3 = 0 ii 0 ! 1 00 1 ! (�1) = �M und M4 = (M2)2 = E2 )M5 =M �M4 =M und M6 =M2 und M7 =M3 et .Zusammen:(M;M2;M3;M4;M5;M6;M7;M8; : : :) = (M;�E2;�M;E2;M;�E2;�M;E2; : : :)) die Potenzen von M dur hlaufen einen Viererzyklus:M! �E2 ! �M! E2 !M! : : :)exp(M) = 1Xk=0 Mkk!

A.16. AUFGABEN ZU KAPITEL 16 385= E2 +M+ 12!M2 + 13!M3 + 14!M4 + 15!M5 + 16!M6 : : := E2 +M� 12!E2 � 13!M+ 14!E2 + 15!M� 16!E2 � 17!M+ 18!E2= E2 � (1� 12! + 14! � 16! + 18! � : : :) +M(1� 13! + 15! � 17! + 19! � : : :) )exp 0 ii 0 ! = E2 � os(1) +M � sin(1) = os(1) i sin(1)i sin(1) os(1) ! .5. (Matrizen) Drehungen: Aus der Vorlesung kennen sie die DrehmatrizenD1(�) = 0BB� 1 0 00 os(�) � sin(�)0 sin(�) os(�) 1CCA und D2(�) = 0BB� os(�) 0 sin(�)0 1 0� sin(�) 0 os(�) 1CCAf�ur Drehungen um die x1 beziehungsweise x2 A hse.(a) Bere hnen sie D21(�; �) def= D2(�) �D1(�) und D12(�; �) def= D1(�) �D2(�) f�ur� = � und � = �=2 . Sie bestimmen somit die Matrizen der Abbildungen, die sieerhalten, wenn sie zum einen zuerst um die x1 A hse um den Winkel � und dannum die x2 A hse um den Winkel �=2 drehen (D21) und zum anderen wenn Sie dieReihenfolge der Drehungen vertaus hen (D12).(b) Bere hnen sie D12(�; �) und D21(�; �) f�ur � = �=3 und � = �=6 .( ) Bere hnen sie D12(�; �) und D21(�; �) f�ur beliebige � und � . F�ur wel he � , �sind die beiden Matrizen glei h?L�osung:(a) F�ur � = � und � = �2 istD1(�) = 0BB� 1 0 00 �1 00 0 �1 1CCA und D2 ��2� = 0BB� 0 0 10 1 0�1 0 0 1CCA)D21 ��2 ; �� = D2 ��2��D1(�) = 0BB� 0 0 10 1 0�1 0 0 1CCA�0BB� 1 0 00 �1 00 0 �1 1CCA = 0BB� 0 0 �10 �1 0�1 0 0 1CCAD12 ��; �2� = D1(�)�D2 ��2� = 0BB� 1 0 00 �1 00 0 �1 1CCA0BB� 0 0 10 1 0�1 0 0 1CCA = 0BB� 0 0 10 �1 01 0 0 1CCA) D12 6= D21 Reihenfolge der Drehungen vertaus ht ) Abbildungen ni ht iden-tis h.(b) Es ist sin(�3 ) = os(�6 ) = p3=2, sowie sin(�6 ) = os(�3 ) = 1=2)D12(�; �) = 0BB� 1 0 00 1=2 �p3=20 p3=2 1=2 1CCA0BB� p3=2 0 1=20 1 0�1=2 0 p3=2 1CCA = 0BB� p3=2 0 1=2p3=4 1=2 �3=4�1=4 p3=2 p3=4 1CCA

386 ANHANG A. L �OSUNGEN DER AUFGABEND21(�; �) = 0BB� p3=2 0 1=20 1 0�1=2 0 p3=2 1CCA0BB� 1 0 00 1=2 �p3=20 p3=2 1=2 1CCA = 0BB� p3=2 p3=4 1=40 1=2 �p3=2�1=2 0; 75 p3=4 1CCA( ) D12 = D1(�) �D2(�) = 0BB� os(�) 0 sin(�)sin(�) sin(�) os(�) � sin(�) os(�)� os(�) sin(�) sin(�) os(�) os(�) 1CCAD21 = D2(�) �D1(�) = 0BB� os(�) sin(�) sin(�) sin(�) os(�)0 os(�) � sin(�)� sin(�) os(�) sin(�) os(�) os(�) 1CCABeide Matrizen sind glei h, wenn sie komponentenweise �ubereinstimmen )(I) sin(�) � sin(�) = 0) � _ � 2 f0; �g(II) sin(�) os(�) = sin(�)) f�ur sin(�) 6= 0) os(�) = 1) � = 0und f�ur sin(�) = 0) � beliebig(III) sin(�) os(�) = sin(�)) f�ur sin(�) 6= 0) � = 0und f�ur sin(�) = 0;) � beliebigZusammen also:1: � = 0; � beliebig 2: � = 0; � beliebig; In diesen beiden F�allen ist ein WinkelNull ) eigentli h wird nur einmal gedreht.3: � = � = � ( f�ur � = � = � werden D1 und D2 Diagonalmatrizen. Diagonal-matrizen sind bei der Multiplikation kommukativ).6. (Matrizen) Skalarprodukt: Gegeben seien die Vektoren~x = 0BB� 123 1CCA ; ~y = 0BB� 210 1CCA ; ~z = 0BB� 40�3 1CCA und ~k = 0BB� 1i1� i 1CCA :(a) Bere hnen sie die L�ange aller vier Vektoren.(b) Wel hen Winkel s hlie�en jeweils ~x und ~y , ~y und ~z sowie ~x und ~z ein?( ) Es gilt < ~x; ~y > = j~xjj~yj os(�(~x; ~y))= j~xj(Projektion von ~y auf ~x)= j~yj(Projektion von ~x auf ~y) :Dabei bezei hnet �(~x; ~y) den von ~x und ~y einges hlossenen Winkel. Wie gro� istalso die Komponente von ~x in Ri htung von ~y und ~z ?L�osung:(a) Die L�ange eines Vektors mit reelen KoeÆzienten in m Dimensionen ist:j~xj = (< ~x; ~x >) 12 =vuut mXi=1 x2i xi 2 R

A.16. AUFGABEN ZU KAPITEL 16 387j~xj =p12 + 22 + 32 = p14 � 3:75j~yj = p4 + 1 + 0 = p5j~zj = p16 + 9 = p25 = 5do h bei komplexen Komponenten muss der erste Faktor no h komplex konjugiertwerden: j~xj =vuut mXi=1 �xixi xi 2 Cj~kj =vuut 3Xi=1 �kiki =p1 � 1 + (�i) � i + (1 + i)(1� i) = p1 + 1 + 2 = p4 = 2;(b) Winkel zwis hen Vektoren: < ~y; ~x >= j~yjj~xj os(�)) � = ar os�< ~y; ~x >j~yjj~xj �Winkel zwis hen ~x und ~y: � = ar os�1 � 2 + 2 � 1 + 0p14 � p5 � � 61:4ÆWinkel zwis hen ~y und ~z: � = ar os�2 � 4 + 0 + 05 � p5 � � 44:3ÆWinkel zwis hen ~x und ~z: = ar os�1 � 4� 3 � 35p14 � � 105:5Æ( ) Es bezei hne ~a~b die Projektion von ~a auf ~b mit L�ange j~a~bj = j~aj os(�) . Entspre- hend ist j~b~aj = j~bj os(�))j~x~yj = j~xj � os(�) = p14 � os(61:4Æ) � 1:8j~x~z j = j~xj � os( ) = p14 � os(105:5Æ) � 1:07. (Kreuz- und Spatprodukt) Wie sie aus der S hule wissen, kann man in drei Di-mensionen ein Kreuzprodukt (au h Vektorprodukt oder �au�eres Produkt genannt)~ = ~a�~b zweier Vektoren ~a und ~b als Vektor, der senkre ht auf der dur h ~a und ~baufgespannten Ebene steht, und dessen L�ange j~a�~bj = j~ajj~bj sin(�(~a;~b)) die Fl�a hedes von ~a und ~b gebildeten Parallelogramms angibt, de�nieren. Eine Regel, na hder man das Kreuzprodukt bere hnen kann, ist~a�~b = det0BB� ~e1 ~e2 ~e3a1 a2 a3b1 b2 b3 1CCA= det a2 a3b2 b3 !~e1 � det a1 a3b1 b3 !~e2 + det a1 a2b1 b2 !~e3 :Dabei bezei hnen die ~ei die Einheitsvektoren im kartesis hen System, d.h.~e1 = 0BB� 100 1CCA ; ~e2 = 0BB� 010 1CCA und ~e3 = 0BB� 001 1CCA :

388 ANHANG A. L �OSUNGEN DER AUFGABEN(a) Bere hnen sie ~x�~y , ~y�~x und ~x�~z f�ur die Vektoren ~x ; ~y und ~z aus Aufgabe 6.Dur h die Kombination von Vektor- und Skalarprodukt erh�alt man das sogenannteSpatprodukt ~a � (~b�~ ) , wel hes das Volumen eines dur h die Vektoren ~a;~b und ~ gebildeten Parallelepipeds angibt. (Ein Parallelepiped ist ein in eine oder mehrereRi htungen s hiefer Quader.)(b) Zeigen sie, dass man das Spatprodukt wie folgt bere hnen kann:~a � (~b� ~ ) = det0BB� a1 a2 a3b1 b2 b3 1 2 3 1CCA : (1.21)( ) Bere hnen sie ~x � (~y � ~z) f�ur die Vektoren ~x ; ~y und ~z aus Aufgabe 6. L�osung:(a) F�ur ~x = 0BB� 123 1CCA ; ~y = 0BB� 210 1CCA und ~z = 0BB� 40�3 1CCA ist~x� ~y = det 2 31 0 !0BB� 100 1CCA� det 1 32 0 !0BB� 010 1CCA+ det 1 22 1 !0BB� 001 1CCA= �30BB� 100 1CCA+ 60BB� 010 1CCA� 30BB� 001 1CCA = 0BB� �36�3 1CCA = �30BB� 1�21 1CCAAu�erdem ist ~x � ~y = det0BB� ~e1 ~e2 ~e3x1 x2 x3y1 y2 y3 1CCA = � det0BB� ~e1 ~e2 ~e3y1 y2 y3x1 x2 x3 1CCA = �~y � ~x(zwei Zeilen vertaus ht ) Determinante �andert Vorzei hen (s. Skript) ))~y � ~x = 30BB� 1�21 1CCA~x� ~z = det 2 30 �3 !0BB� 100 1CCA� det 1 34 �3 !0BB� 010 1CCA+ det 1 24 0 !0BB� 001 1CCA= �60BB� 100 1CCA+ 150BB� 010 1CCA� 80BB� 001 1CCA = 0BB� �615�8 1CCA

A.16. AUFGABEN ZU KAPITEL 16 389(b) Es ist einerseitsdet0BB� a1 a2 a3b1 b2 b3 1 2 3 1CCA = a1b2 3 + a2b3 1 + a3b1 2 � a3b2 1 � a1b3 2 � a2b1 3und andererseits~b� ~ = det0BB� ~e1 ~e2 ~e3b1 b2 b3 1 2 3 1CCA = ~e1b2 3 + ~e2b3 1 + ~e3b1 2 � ~e3b2 3 � ~e2b1 3 � ~e1b3 2= ~e1(b2 3 � b3 2) + ~e2(b3 1 � b1 3) + ~e3(b1 2 � b2 1)beziehungsweise als Vektor dargestellt: ~b� ~ = 0BB� b2 3 � b3 2b3 1 � b1 3b1 2 � b2 1 1CCA )~a � (~b� ~ ) = 0BB� a1a2a3 1CCA �0BB� b2 3 � b3 2b3 1 � b1 3b1 2 � b2 1 1CCA= a1b2 3 + a2b3 1 + a3b1 2 � a1b3 2 � a2b1 3 � a3b2 1= det0BB� a1 a2 a3b1 b2 b3 1 2 3 1CCA (q.e.d.)( ) ~x � (~y � ~z) = det0BB� x1 x2 x3y1 y2 y3z1 z2 z3 1CCA = det0BB� 1 2 32 1 04 0 �3 1CCA= 1 � 1 � (�3) + 0 + 0� 4 � 1 � 3� 0 + 3 � 2 � 2 = �38. (Matrizen) Adjungierte Matrix(a) Einleitendes Beispiel: Bere hnen sie f�urA = 1 12 1 ! ; ~x = �12 ! und ~y = 34 !die Skalarprodukte < ~x;A~y >, < ~x;AT ~y >, < A~x; ~y >, < AT~x; ~y >, < ~y;A~x >,< ~y;AT~x >, < A~y; ~x > und < AT ~y; ~x >. Wel he dieser Ausdr�u ke sind jeweilsglei h?Eine n � n Matrix Ay hei�t zu A adjungiert, falls < Ay~x; ~y >=< ~x;A~y > f�uralle ~x; ~y 2 Rn gilt. Sind die beiden Matrizen glei h, also A = Ay, so nennt man Aselbstadjungiert.(b) Zeigen sie, dass f�ur reelle A gilt: Ay = AT .

390 ANHANG A. L �OSUNGEN DER AUFGABEN( ) Wie erh�alt man Ay aus A, falls A komplexe Komponenten enth�alt?L�osung:(a) F�ur A = 1 12 1 ! ist AT = 1 21 1 ! . Au�erdem ist das Skalarprodukt imReellen symmetris h (siehe Vorlesung) )< A~y; ~x > = < ~x;A~y >= ��12 �� 710� = �7 + 20 = 13< AT ~y; ~x > = < ~x;AT ~y >= ��12 ��117 � = �11 + 14 = 3< ~y;A~x > = < A~x; ~y >= �10��34� = 3< ~y;AT~x > = < AT~x; ~y >= �31��34� = 9 + 4 = 13Man erkennt, dass au�er der bereits bekannten Symmetrie des Skalarprodukts no h< ~x;A~y >=< AT~x; ~y > und < ~x;AT~y >=< A~x; ~y > gilt. Das dies kein Zufall ist,soll nun gezeigt werden.(b) Zun�a hst no h eine neue Notation, um den Unters hied zwis hen Zeilen- undSpaltenvektoren besser zum Ausdru k bringen zu k�onnen:Es seien j~x >= 0BBBBB� x1x2...xn1CCCCCA und j~y >= 0BBBBB� y1y2...yn
1CCCCCA Spaltenvektoren, dann sollen mit< ~xj = (x1; x2; : : : ; xn) und < ~yj = (y1; y2; : : : ; yn) die zugeh�origen Zeilenvektorenbezei hnet werden. Es gilt also < ~xj = (j~x >)T , d.h. 0BBBBB� x1x2...xn1CCCCCAT = (x1; x2; : : : ; xn) .Damit kann das Skalarprodukt wie eine ganz normale Matrixmultiplikation angese-hen werden, denn es gilt< ~x; ~y > = nXi=1 xiyi = (Zeilenvektor ~x) � (Spaltenvektor ~y)= (1� n Matrix X) � (n� 1 Matrix Y) = (Skalar) :Nun ist aber wegen (A �B)T = BT �AT au h< A � ~xj = (jA � ~x >)T = j~x >T �AT =< ~xj �ATund somit wegen der Assoziativit�at der Matrixmultiplikation< A � ~x; ~y >=< ~xj �AT � j~y >=< ~x;AT ~y >) AT und A sind adjungiert zueinander (q.e.d.).( ) Was �andert si h nun, falls die Vektoren und Matrizen keine reelen sondernkomplexe Komponenten haben? Dann gilt < ~x; ~y >= nXi=1 �xiyi = (�x1; �x2; : : : ; �xn) �

A.17. AUFGABEN ZU KAPITEL 17 3910BBBBB� y1y2...yn1CCCCCA = �x1y1 + �x2y2 + : : : + �xnyn . Man muss nun also < ~xj aus j~x > dur hTransponieren und komplex Konjugieren bilden, d.h. < ~xj = j~x >T um das Skalar-produkt wieder als Matrixprodukt interpretieren zu k�onnen. Dann folgt wie in (b)und wegen z1 � z2 = �z1 � �z2< A~x; ~y >= jA~x >T � j~y >= j~x >T �AT � j~y >= j~x >T �AT � j~y >=< ~x;A�~y > ;wobei A� := AT eingef�uhrt wurde. Im Komplexen ist also A� = Ay die zu Aadjungierte Matrix.Bemerkung: Eine Matrix, f�ur die A = A� gilt, hei�t au h hermitis h.A.17 Aufgaben zu Kapitel 171. (Determinanten) Gegeben seien die MatrizenA = 2 31 �2 !,B = 1 33 �7 ! ,C = 2 �1 03 1 1 ! und D = 0BB� 4 1�2 21 3 1CCA .Bere hnen sie (falls de�niert) die Determinaten der Matrizen A, B, C, D, AT , B4 ,AB, CTD, CD, (DC)2.L�osung:det(A) = 2 � (�2)� 3 � 1 = �7det(B) = 1 � (�7)� 3 � 3 = �16det(C) und det(D) ni ht de�niert, da keine n� n Matrizen.det(AT ) = det(A) = �7 siehe Re henregeln, Skript ab S. 147 (15.12).det�B4 � = �14�2 � det(B) = 116 � (�16) = �1 (15.11)det(AB) = det(A) � det(B) = �7 � (�16) = 112 (15.13)CT �D: Produkt ni ht de�niertC �D = 10 011 8 !) det(CD) = 80 (Multiplikationssatz hier ni ht anwendbar,da det(C) und det(D) ni ht de�niert.)D �C = 0BB� 11 �3 12 4 211 2 3 1CCA )

392 ANHANG A. L �OSUNGEN DER AUFGABENdet[(DC)2℄ = det[(DC) � (DC)℄ = [det(DC)℄2 = 2664det0BB� 11 �3 12 4 211 2 3 1CCA37752= [11 � 4 � 3 + (�3) � 2 � 11 + 1 � 2 � 2� 11 � 4 � 1� 2 � 2 � 11� 3 � 2 � (�3)℄2 = 02. (Determinanten) MatrixinversionF�ur regul�are Matrizen A existiert eine inverse Matrix A�1 und eine M�ogli hkeit,diese zu bere hnen, kennen sie aus der Vorlesung:A�1 = 1det(A) [C(A)℄T ; d:h: (A�1)ij = [C(A)℄jidet(A) : (1.22)Dabei bezei hnet C(A) die Matrix der Kofaktoren vonA . F�ur deren Komponentengilt [C(A)℄ij = (�1)i+j [M(A)℄ij mit den Minoren [M(A)℄ij von A. Der Minor[M(A)ij ℄ bezei hnet die Determinate derjenigen Untermatrix vonA , die man dur hStrei hen der i{ten Zeile und j{ten Spalte aus A erh�alt.(a) Bere hnen sie mit Hilfe der Regel (1.22) die inversenMatrizen vonA = 2 34 1 ! ,B = a b d ! und D = 0BB� 1 0 20 1 00 �1 3 1CCA . Bere hnen sie zur Probe AA�1 , B�1Bund DD�1 .(b) L�osen sie A~x = ~p und D~x = ~q f�ur ~p = 14 ! und ~q = 0BB� 321 1CCA .L�osung:zuA�1: det(A) = �10 und die Kofaktoren sind 11 = 1; 12 = �4; 21 = �3; 22 =2 zusammen alsoC(A) = 1 �4�3 2 !) CT (A) = 1 �3�4 2 !) A�1 = � 110 � 1 �3�4 2 ! = � 110 31025 � 15 !Probe: A � A�1 = 2 34 1 ! � � 110 310410 � 210 ! = � 210 + 1210 610 � 610� 410 + 410 1210 � 210 ! = 1 00 1 ! = E2 .F�urB = a b d ! ist det(B) = ad�b und 11 = d; 12 = � ; 21 = �b; 22 = a .) C(B) = d � �b a !) CT (B) = d �b� a !

A.17. AUFGABEN ZU KAPITEL 17 393) B�1 = 1ad� b � d �b� a ! = dad�b �bad�b � ad�b aad�b !Probe:B�1�B = dad�b �bad�b � ad�b aad�b !� a b d ! = daad�b � b ad�b dbad�b � bdad�b � aad�b + a ad�b � bad�b + adad�b != da�b da�b 00 � b+adda�b ! = 1 00 1 !F�ur D = 0BB� 1 0 20 1 00 �1 3 1CCA sind die Kofaktoren 11 = ����� 1 0�1 3 ������(�1)2 = 3 ; 12 = ����� 0 00 3 ������(�1)3 = 0 ; 13 = ����� 0 10 �1 ������(�1)4 = 0 21 = ����� 0 2�1 3 ������(�1)3 = �2 ; 22 = ����� 1 20 3 ������(�1)4 = 3 ; 23 = ����� 1 00 �1 ������(�1)5 =1 , 31 = ����� 0 21 0 ������(�1)4 = �2 ; 32 = ����� 1 20 0 ������(�1)5 = 0 ; 33 = ����� 1 00 1 ������(�1)6 = 1 .C(D) = 0BB� 3 0 0�2 3 1�2 0 1 1CCA) CT (D) = 0BB� 3 �2 �20 3 00 1 1 1CCAdet(D) = �������� 1 0 20 1 00 �1 3 �������� = 3 + 0 + 0� 0 + 0 + 0 = 3D�1 = 13 �0BB� 3 �2 �20 3 00 1 1 1CCA = 0BB� 1 � 23 � 230 1 00 13 13 1CCAProbe: DD�1 = 0BB� 1 0 20 1 00 �1 3 1CCA0BB� 1 � 23 � 230 1 00 13 13 1CCA = 0BB� 1 0 00 1 00 0 1 1CCAzu (b): A~x = ~p, A�1A~x = A�1~p) ~x = � 110 310410 � 210 ! ��14� = � 1110� 410�D~x = ~q , ~x = D�1q ) ~x = 0BB� 1 � 23 230 1 00 13 13 1CCA �0BB� 321 1CCA = 0BB� 121 1CCA3. (Cramers he Regel)

394 ANHANG A. L �OSUNGEN DER AUFGABEN(a) Bestimmen sie den S hnittpunkt der beiden Geraden g1 : �x1 + 2x2 = 2 undg2 : x1 + 2x2 = 6 von Aufgabe 1 des 3. �Ubungsblattes mit der Cramers hen Regel.(b) L�osen sie das lineare Glei hungssystem3y + 2x = z + 13x+ 2z = 8� 5y�1 + 3z = x� 2ymit Hilfe der Cramers hen Regel.L�osung:(a) g1 : �x1 + 2x2 = 2 und g2 : x1 + 2x2 = 6 sind zusammen von der FormA~x = ~b , n�amli h �1 21 2 ! � �x1x2� = �26�Nun ist det(A) = �4 ; A1 = 2 26 2 ! und somit det(A1) = �8 ) x1 = �8�4 = 2und aus A2 = �1 21 6 !) det(A2) = �8) x2 = �8�4 = 2Zusammen ergibt si h der S hnittpunkt der beiden Geraden zu S(2; 2) .(b) Zun�a hst muss das Glei hungssystem auf die Form A~x = ~b gebra ht werden:0BB� 2 3 �13 5 2�1 2 3 1CCA �0BB� xyz 1CCA = 0BB� 181 1CCADann ist det(A) = det0BB� 2 3 �13 5 2�1 2 3 1CCA = 30 � 6 � 6 � 5 � 8 � 27 = �22 undau�erdemdet(A1) = det0BB� 1 3 �18 5 21 2 3 1CCA = 15+6� 16+5� 4�72= �66 ) x = �66�22 = 3 ,det(A2) = det0BB� 2 1 �13 8 2�1 1 3 1CCA = 48� 2� 3� 8� 4� 9 = 22 ) y = 22�22 = �1det(A3) = det0BB� 2 3 13 5 8�1 2 1 1CCA = 10� 24+ 6+ 5� 32� 9 = �44 ) z = �44�22 = 24. (Eigenwertproblem) Eigensysteme

A.17. AUFGABEN ZU KAPITEL 17 395Gegeben seien die Matrizen A = 1 23 2 ! und B = 0BB� 0 �4=3 �4=30 2 00 �4 �2 1CCA .(a) Bere hnen sie Eigenwerte und Eigenvektoren der Matrizen A und B (Normie-rung ni ht vergessen).(b) Bere hnen sie f�ur alle Eigenvektoren ~v� vonA undB das ProduktA~v� bzw.B~v� .L�osung:Aus der Eigenwertbedingung A~v = �~v folgt (A��E2)~v = ~0 . Diese Glei hung wirdtrivialerweise von ~v = ~0 erf�ullt, denno h ist der Nullvektor kein Eigenvektor, weildiese na h Voraussetzung vers hieden ~0 sein m�ussen. Daraus ergibt si h dann dieBedingung det(A� �E2) = 0 .Hier alsodet" 1 23 2 !� � 1 00 1 !# = det" 1 23 2 !� � 00 � !#= det 1� � 23 2� � != (1� �)(2� �)� 6 = 0, 2� 2�� �+ �2 � 6 = 0, �2 � 3�� 4 = 0,�1=2 = 32 �s�32�2 + 4 = 32 �r254 = 32 � 52 ) �1 = �1 und �2 = 4 .Die Eigenvektoren folgen nun aus (A� �E2)~x = ~0f�ur �1 : " 1 23 2 ! � (�1) 1 00 1 !# ~x = ~0, 2 23 3 !�x1x2� = �00�) x1 = �x2Normierungsbedingung: 1 =qx21 + x22 =q2x22 = p2 x2 ) ~v�1 = 1p2��1+1� .f�ur �2 : " 1 23 2 !� 4 00 4 !# ~x = ~0, �3 23 �2 !�x1x2� = �00�) x1 = 23x2Normierung: 1 =qx21 + x22 =s�23�2 x22 + x22 =r49 x22 + x22 =r139 x2;) x2 = �139 �� 12 = 3p13; x1 = 23 �139 �� 12 = 2p13 ) ~v�2 = 1p13�23�Nun zu B = 0BB� 0 � 43 � 430 2 00 �4 �2 1CCA

396 ANHANG A. L �OSUNGEN DER AUFGABENdet(B� �E3) = 0, det26640BB� 0 � 43 � 430 2 00 �4 �2 1CCA� �0BB� 1 0 00 1 00 0 1 1CCA3775 = 0,det26640BB� �� � 43 � 430 2� � 00 �4 �2� � 1CCA3775 = ��(2� �)(�2� �) = �(2� �)(2 + �)) �1 = 0 ; �2 = 2 und �3 = �2 .Die Eigenvektoren ergeben si h aus (B� �E3)~x = ~0f�ur �1 : 0BB� 0 � 43 � 430 2 00 �4 �2 1CCA �0BB� x1x2x3 1CCA = 0BB� 000 1CCADa die erste Spalte der Matrix B Null ist, wird x1 bei Multiplikation immer Null;dur h Normierung erh�alt man:0BB� x1x2x3 1CCA = 0BB� 100 1CCA = ~v�1f�ur �2: 26640BB� 0 � 43 � 430 2 00 �4 �2 1CCA�0BB� 2 0 00 2 00 0 2 1CCA3775 ~x = ~00BB� �2 � 43 � 430 0 00 �4 �4 1CCA �0BB� x1x2x3 1CCA = 0BB� 000 1CCAErste Zeile (I): �2x1 � 43x2 � 43x3 = 0;Dritte Zeile (III): �4x2 � 4x3 = 0 j � (�13)III': 43x2 + 43x3 = 0I+III':�2x1 = 0) x1 = 0) x2 = �x3;Normierung: 1 =qx21 + x22 + x23 . Wegen x1 = 0 )1 =qx22 + x23 =q2x22 = p2 x2 ) x2 = + 1p2 und x3 = � 1p2 )~v�2 = 1p2 0BB� 01�1 1CCA

A.17. AUFGABEN ZU KAPITEL 17 397f�ur �3: 26640BB� 0 � 43 � 430 2 00 �4 �2 1CCA�0BB� �2 0 00 �2 00 0 �2 1CCA3775 ~x = ~0, 0BB� 2 � 43 � 430 4 00 �4 0 1CCA0BB� x1x2x3 1CCA = 0BB� 000 1CCA) x2 = 0 (aus Zeile 2 oder 3 o�ensi htli h) ) 2x1 � 43x3 = 0 , 2x1 = 43x3 ,x1 = 46x3 = 23x3 (vgl. Aufgabe 3)) x3 = �139 �� 12 x1 = 23 �139 �� 12 ) ~v�3 = 1p13 0BB� 203 1CCA(b) A~v�1 = 1 23 2 ! � � 1p21p2 ! = 1p2� 1p2 ! = (�1) � ~v�1A~v�2 = 1 23 2 ! � 1p13 23 ! = 1p13 812 ! = 4 � ~v�2B~v�1 = 0BB� 0 � 43 � 430 2 00 �4 �2 1CCA �0BB� 100 1CCA = 0BB� 000 1CCA = 0 � ~v�1B~v�2 = 0BB� 0 � 43 � 430 2 00 �4 �2 1CCA �0BB� 01p2� 1p2 1CCA = 0BB� 02p2� 2p2 1CCA = 2 � ~v�2B~v�3 = 0BB� 0 � 43 � 430 2 00 �4 �2 1CCA � 1p13 0BB� 203 1CCA = 1p13 0BB� �40�6 1CCA = (�2) � ~v�35. (Determinanten) �Ahnli hkeitstransformationenBere hnen sie die Matrizen ~A = P�1AP und ~B = Q�1BQ mit P = 2 13 �1 !und Q = 0BB� 1 0 20 1 00 �1 3 1CCA f�ur die Matizen A und B aus Aufgabe 3.F�allt Ihnen etwas auf?Bemerkung: Zwei Matrizen A und ~A hei�en �ahnli h, falls eine Matrix P existiert,mit der man ~A aus A via ~A = P�1AP bere hnen kann. Ans hauli h bedeutet die-se Transformation einen Basiswe hsel und sie wird als �Ahnli hkeitstransformation

398 ANHANG A. L �OSUNGEN DER AUFGABENbezei hnet. Damit sind A und ~A Darstellungen derselben linearen Abbildung { nurbez�ugli h vers hiedener Basen.L�osung:F�ur P = 2 13 �1 ! ist P�1 = 15 1 13 �2 ! und somit AP = 8 �112 1 ! und~A = P�1AP = 4 00 �1 !~A ist also eine Diagonalmatrix, wobei ein Verglei h mit Aufgabe 4 zeigt, dass dieDiagonalelemente glei h den Eigenwerten von A sind, w�ahrend die Matrix P ausden dazugeh�origen Eigenvektoren besteht.Q = 0BB� 1 0 20 1 00 �1 3 1CCA ) Q�1 = 0BB� 1 � 23 � 230 1 00 13 23 1CCA )BQ = 0BB� 0 0 �40 2 00 �2 6 1CCA) ~B = Q�1BQ = 0BB� 0 0 00 2 00 0 �2 1CCAWieder ist ~B eine Diagonalmatrix mit den Eigenwerten von B und Q die Matrix,deren Spalten aus den zugeh�origen Eigenvektoren besteht. Dabei k�onnen die Eigen-vektoren beliebig skaliert sein.Bemerkung: Da det(~A) = det(P�1AP) = det(P�1) det(A) det(P)= det(P�1) det(P) det(A) = det(P�1P) det(A) = det(E2) det(A) = det(A) �andertsi h die Determinante unter �Ahnli hkeitsformationen ni ht.6. (Eigenwertproblem)Eigenwerte und Eigenvektoren reeller symmetris herMatrizenBeweisen sie, dass reelle symmetris he Matrizen nur reelle Eigenwerte haben k�onnenund dass ihre Eigenvektoren zu vers hiedenen Eigenwerten orthogonal zueinandersind.L�osung:Sei also A reel und symmetris h, d.h. A = AT und aij 2 R .Beweis der ersten Behauptung:Betra hte das Skalarprodukt zweier Vektoren mit beliebigen komplexen Komponen-ten. Daf�ur gilt< ~x; ~y > = nXi=1 �xi( yi) = nXi=1 �xi; yi = < ~x; ~y > und< ~x; ~y > = nXi=1( xi)yi = nXi=1(� �xi)yi = � nXi=1 �xiyi = � < ~x; ~y >Sei nun: A~x = �~x)< ~x;A~x >=< ~x; �~x >= � < ~x; ~x >= � j~xj2 (Bedingung 1)

A.18. AUFGABEN ZU KAPITEL 18 399Na h Aufgabe 8 von Kapitel 16 sind reelle symmetris he Matrizen selbstadjungiert,d.h. es gilt < ~x;A~y >=< A~x; ~y > und deshalb< ~x;A~x >=< A~x; ~x >=< �~x; ~x >= �� < ~x; ~x >= �� j~xj2 (Bedingung 2)Beide Bedingungen zusammen genommen ergeben ��j~xj2 = ���j~xj2 . Da ~x Eigenvektorist, ist ~x 6= ~0) j~xj 6= 0) � = ��) � 2 R (q.e.d.).Beweis der zweiten Behauptung:Sei A~x = �~x und A~y = �~y mit � 6= � .Dann ist wegen < ~x;A~y > = < A~x; ~y > (weil A selbstadjungiert) und< ~x;A~y > = < ~x; �~y >= � < ~x; ~y > sowie< A~x; ~y > = < �~x; ~y >= � < ~x; ~y > (siehe oben)also � < ~x; ~y >= � < ~x; ~y > und somit (���) < ~x; ~y >= 0 . Da aber � und � na hVoraussetzung vers hieden sind, folgt daraus < ~x; ~y >= 0 , die Orthogonalit�at derzugeh�origen Eigenvektoren (q.e.d.).A.18 Aufgaben zu Kapitel 18Gegeben sei die Ebene E(x; y) = x+ y , sowie die Funktionenf(x; y) = �x2 � y2 , g(x; y) = �4x2 � (y � 1)2 ,h(x; y) = x2 � y2 und k(x; y) = 3 + 4x+ 2y + x2 � y2 von R�R! R .1. (Funktionen mehrerer Variabler) NiveaulinienBere hnen und skizzieren sie (soweit existent) die Niveaulinien z(x; y) = der vierFunktionen E(x; y) , f(x; y) , g(x; y) und h(x; y) f�ur (i) 1 = 0 , (ii) 2 = 1 und (iii) 3 = �1 .L�osung:F�ur E(x; y) = x+y ) x+y = , y = �x+ ergibt si h eine Gerade mit Steigung�1 und y{A hsenabs hnitt . 1 = 0 : y = �x 2 = 1 : y = �x+ 1 3 = �1 : y = �x� 1 .F�ur f(x; y) = �x2 � y2 ) �x2 � y2 = , y = �p�x2 � erh�alt man f�ur > 0keine reellen L�osungen, f�ur = 0 eine Punktl�osung bei (0; 0) und f�ur < 0 Kreisemit Radius p� : 1 = 0 : y = �p�x2 ) (0; 0) 2 = 1 : y = �p�x2 � 1) keine L�osung in R 3 = �1 : y = �p1� x2 ) Kreis mit Radius Eins um den Ursprung.F�ur g(x; y) = �4x2 � (y � 1)2 ) �4x2 � (y � 1)2 = , y = 1�p� � 4x2Tri k: Sei ~x = 2x und ~y = y � 1) ~g(~x; ~y) = �~x2 � ~y2 = f(~x; ~y) wie zuvor

400 ANHANG A. L �OSUNGEN DER AUFGABEN) die Niveaulinien von g erh�alt man aus den Niveaulinien von f dur h Vers hiebenum +1 entlang der y{A hse und Umskalieren der x{A hse ) Ellipsen f�ur < 0,Punkt f�ur = 0 bei (0,1) und keine L�osung f�ur > 0 . 1 = 0 : y = 1�p�4x2 ) (0; 1) 2 = 1 : y = 1�p�1� 4x2 ) keine L�osung in R 3 = �1 : y = 1�p1� 4x2 f�ur jxj � 12 (Ellipse)F�ur h(x; y) = x2 � y2 ) x2 � y2 = , y = �px2 � ergeben si h Hyberbeln(au�er f�ur = 0): 1 = 0 : y = � x; x 2 R (zwei Geraden) 2 = 1 : y = �px2 � 1, f�ur jxj � 1 (zwei Hyperbel�aste) 3 = �1 : y = �px2 + 1; x 2 R (ebenfalls zwei Hyperbel�aste)−2 0 2
−2
−1
0
1
2
y
E(x,y)
−1
0
1
−2 0 2−2
−1
0
1
2
y
f(x,y)
−2
−2
−1
−2 0 2−2
−1
0
1
2
x
y
g(x,y)
−2
−2 0 2−2
−1
0
1
2
x
y
h(x,y)
−2−1
0
0 1
1Abbildung A.46: Niveaulinien der vier Funktionen E(x; y) = x+y , f(x; y) = �x2�y2 , g(x; y) = �4x2 � (y � 1)2 und h(x; y) = x2 � y22. (Partielle Ableitungen)Bilden sie folgende partielle Ableitungen:�f(x; y)�x , �f(x; y)�y , �2f(x; y)�x2 , �2f(x; y)�y2 , �2f(x; y)�x�y , �2f(x; y)�y�x , �k(x; y)�x , �k(x; y)�y ,�2k(x; y)�x2 , �2k(x; y)�y2 , �2k(x; y)�x�y und �2k(x; y)�y�x .L�osung:Mit f(x; y) = �x2 � y2 und k(x; y) = 3 + 4x+ 2y + x2 � y2 ergibt si h

A.18. AUFGABEN ZU KAPITEL 18 401�f�x = �2x , �f�y = �2y , �2f�x2 = �2 , �2f�y2 = �2 , �2f�x�y = 0 , �2f�y�x = 0 , �k�x =4 + 2x , �k�y = 2� 2y , �2k�x2 = 2 , �2k�y2 = �2 , �2k�x�y = 0 und �2k�y�x = 0 .3. (Partielle Ableitungen) Taylorentwi klungEntwi keln sie die Funktionen f(x; y) und k(x; y) bis zur quadratis hen Ordnungum die Punkte P1 = (0; 0) und P2 = (�2; 1) na h Taylor.L�osung:Vorbemerkung: Da sowohl f als au h k quadratis he Funktionen in x und y sind,muss eine Taylorentwi klung bis zur quadratis hen Ordnung die Funktion selbstunabh�angig vom Entwi klungspunkt reproduzieren.Taylorformel: f(~r) = f(~r0) +rf(~r0) � (~r � ~r0) + 12(~r � ~r0)TH(~r0)(~r � ~r0) + : : :mit ~r = �xy�; ~r0 = �x0y0�; rf(~r0) = �f�x (x0; y0)�f�y (x0; y0) ! und der Hessematrix Hausgewertet am Entwi klungspunkt.Damit ist f(x; y) um (0; 0) bis zur quadratis hen Ordnung entwi keltfquad(x; y) = f(0; 0)+ < �f�x (0; 0)�f�y (0; 0) ! ;�xy� >+12 < �xy�; �2f�x2 (0; 0) �2f�x�y (0; 0)�2f�y�x(0; 0) �2f�y2 (0; 0) !�xy� >= 0+ < �00�;�xy� > +12 < �xy�; �2 00 �2 !�xy� >= 0 + 0 + 12 < �xy�;��2x�2y� >= �x2 � y2und um den Punkt (�2; 1) ergibt si hfquad(x; y) = f(�2; 1)+ < �f�x (�2; 1)�f�y (�2; 1) ! ;�x+ 2y � 1� >+12 < �x+ 2y � 1�; �2f�x2 (�2; 1) �2f�x�y (�2; 1)�2f�y�x(�2; 1) �2f�y2 (�2; 1) !�x+ 2y � 1� >= �5+ < � 4�2�;�x+ 2y � 1� > +12 < �x+ 2y � 1�; �2 00 �2 !�x+ 2y � 1� >= �5 + 4x+ 8� 2y + 2� (x+ 2)2 � (y � 1)2= �x2 � y2 :F�ur k(x; y) um (0; 0) ergibt si h bis zur quadratis hen Ordnungkquad(x; y) = k(0; 0)+ < �k�x(0; 0)�k�y (0; 0) ! ;�xy� > +12 < �xy�; 2 00 2 !�xy� >

402 ANHANG A. L �OSUNGEN DER AUFGABEN= 3+ < �42�;�xy� > + < �xy�;� x�y� >= 3 + 4x+ 2y + x2 � y2 :und f�ur k(x; y) um (�2; 1) bis zur quadratis hen Ordnungkquad(x; y) = k(�2; 1)+ < �k�x(�2; 1)�k�y (�2; 1) ! ;�x+ 2y � 1� >+12 < �x+ 2y � 1�; �2 00 �2 !�x+ 2y � 1� >= 0+ < �00�;�x+ 2y � 1� > + < �x+ 2y � 1�;�x+ 2y � 1� >= (x + 2)2 � (y � 1)2 (�)= 3 + 4x+ 2y + x2 � y2 :In der vorletzten Zeile (�) kann man erkennen, dass k(x; y) einen Sattel wie h(x; y)hat, aber vers hoben zum Punkt (�2; 1) .4. (Partielle Ableitungen) Gradient und Ri htungsableitungBere hnen sie den Gradienten der vier Funktionen f(x; y), g(x; y), h(x; y) undk(x; y) . Bestimmen sie nun no h die Ri htungsableitungen dieser vier Funktionenentlang der Vektoren ~v1 = (1; 1) und ~v2 = (1;�2) .L�osung:Die Gradienten: rf(x; y) = �f�x�f�y ! = ��2x�2y� ; rg(x; y) = � �8x�2y + 2� ,rh(x; y) = � 2x�2y� und rk(x; y) = �4 + 2x2� 2y� .Die Ri htungsableitungen entlang ~v1 = �11� : < rf;~v1 >= �2x� 2y ,< rg;~v1 >= �8x� 2y + 2 ; < rh;~v1 >= 2x� 2y ; < rk;~v1 >= 6 + 2x� 2y undentlang ~v2 = � 1�2� : < rf;~v2 >= �2x+ 4y ; < rg;~v2 >= �8x+ 4y � 4 ,< rh;~v2 >= 2x+ 4y und < rk;~v2 >= 2x+ 4y .Bemerkung: Wir haben die Ri htungsableitung ohne Normierung des Vektors de�-niert, auf den man den Gradienten projeziert, daher h�angt der Wert der Ri htungs-ableitung hier ni ht nur davon ab, in wel he Ri htung man \geht\, sondern au hdavon \wie weit\ (d.h. wie lang der Vektor ist). Alternativ kann man die Ri htungs-ableitung so de�nieren, dass man genau eine L�angeneinheit weit in die betra hteteRi htung geht. Dazu m�u�te man dann ~v1 und ~v2 vorher normieren.5. (Partielle Ableitungen) Lokale ExtremaBestimmen und klassi�zieren (lokales Maximum, Minimum oder Sattelpunkt?) siedie station�aren Punkte der vier Funktionen f(x; y), g(x; y), h(x; y) und k(x; y) .

A.18. AUFGABEN ZU KAPITEL 18 403L�osung:Eine Funktion f(x; y) hat einen station�aren Punkt bei (x0; y0) , falls ihr Gradientdort vers hwindet.rf(x0; y0) = ~0 , ��2x0�2y0� = �00�) x0 = 0 und y0 = 0rg(x0; y0) = ~0 , � �8x0�2y0 + 2� = �00�) x0 = 0 und y0 = 1rh(x0; y0) = ~0 , � 2x0�2y0� = �00�) x0 = 0 und y0 = 0rk(x0; y0) = ~0 , �4 + 2x02� 2y0� = �00�) x0 = �2 und y0 = 1Klassi�kation: f bei (0; 0): Die Hessematrix von f ist �2 00 �2 ! ) D(~r0) =4 > 0 und �2f�x2 (~r0) = �2 < 0 und �2f�y2 (~r0) = �2 < 0) lokales Maximumg bei (0; 1): Die Hessematrix von g ist �8 00 �2 !) lokales Maximum (s.o.)h bei (0; 0): Die Hessematrix von h ist 2 00 �2 !) det 2 00 �2 ! = �4 < 0)Sattelpunktk bei (�2; 1): Die Hessematrix von k ist 2 00 �2 !) Sattelpunkt (vgl h)6. (Partielle Ableitungen) Partielle Di�erentialglei hungen I: Wellenglei- hungEine Glei hung der Form �2f(x; t)�t2 = a�2f(x; t)�x2hei�t Wellenglei hung (oder d'Alembert{Glei hung).(a) Unter wel her Bedingung erf�ullt die Funktion f(x; t) = exp[i(kx � !t)℄ dieWellenglei hung?Bilden sie dazu die partiellen Ableitungen �2f(x; t)�x2 und �2f(x; t)�t2 und setzen siediese in die Wellenglei hung ein.(b) Zeigen sie: Jede Funktion der Form y = f(x� t) oder y = f(x+ t) ist L�osung derWellenglei hung mit der Ges hwindigkeit = pa . Wel he Ges hwindigkeit erhaltensie somit f�ur die in (a) gefundene L�osung?L�osung:(a) F�ur f(x; t) = exp(i(kx� !t)) ist�f�t = �i! exp(i(kx� !t))) �2f�t2 = �!2 exp(i(kx� !t)) = �!2f(x; t) und�f�x = ik exp(i(kx � !t))) �2f�x2 = �k2 exp(i(kx� !t)) = �k2f(x; t)

404 ANHANG A. L �OSUNGEN DER AUFGABENEingesetzt in die Wellenglei hung ergibt si h �!2f(x; t) = a � (�k2)f(x; t) ) (weilf(x; t) 6= 0 f�ur alle x und t) ) F�ur �!k �2 = a erf�ullt f(x; t) die Wellenglei hung.(b) Sei y(x; t) = f(x� t) und sei weiter u(x; t) = x� t) y(x; t) = f(u))�y�x = �f�u �u�x = �f�u ) �2y�x2 = �2f�u2 und �y�t = �f�u �u�t = � �f�u ) �2y�t2 = 2 �f�uEinsetzen liefert: 2 �f�u = a�f�u ) f�ur = pa erf�ullt f(x� t) die Wellenglei hung.F�ur y(x; t) = f(x+ t) l�auft die Argumentation genauso.Die Ges hwindigkeit der Welle in (a) ist wegen exp[i(kx � !t)℄ = exp[ik(x � !k t)℄glei h !=k.7. (Funktionen mehrerer Variabler) 3{D PlotBetra hten sie den folgenden Graphen der Funktion z(x; y) . Stellt er eine der Funk-tionen f , g, h oder k dar oder ni ht? Wenn ja, wel he?
−5
0
5
−5
0
5−40
−30
−20
−10
0
10
20
30
40
50
xy
z(x,
y)
Abbildung A.47: Der Graph von k(x; y) = 3 + 4x+ 2y + x2 � y2 .8. (Funktionen mehrerer Variabler)Untersu hen sie die Funktionen f(x; y) = (1+sin(x))(1+y2) und g(x; y) = exp(�x2�y2) auf Nullstellen und Extremwerte.L�osung:Zun�a hst zu f(x; y) = (1 + sin(x))(1 + y2) von R�R! RNullstellen: f(x; y) = 0 , 1 + sin(x) = 0 , da (1 + y2) > 0 f�ur alle y 2 R, sin(x) = �1, x = ar sin(�1)) x = 3�2 + 2k�; k 2 Z

A.18. AUFGABEN ZU KAPITEL 18 405Da y f�ur x = 3�2 + 2k� jeweils beliebige Werte annehmen kann, gibt es unendli hviele Nullinien der Form x = 3�2 + 2k�; k 2 ZExtremwerte: station�are Punkte aus rf = ~0rf = �f�x�f�y ! = os(x)(1 + y2)2y[1 + sin(x)℄ ! = �00�, (1) os(x) = 0(2) 2y[1 + sin(x)℄ = 0Aus (1) folgt x = �2+k�; k 2 Z, damit in (2) ergibt y beliebig f�ur x = 3�2 +2k�; k 2 Zund y = 0 f�ur x = �2 + 2k�; k 2 ZHessematrix von f : �2f�x2 �2f�y�x�2f�x�y �2f�y2 ! = � sin(x)(1 + y2) 2y os(x)2y os(x) 2[1 + sin(x)℄ !f�ur y = 0 und x = �2 +2k� ) H = �1 00 4 !) detH = �4 < 0) SattelpunkteF�ur y 2 R und x = 3�2 + 2k� ) H = 1 + y2 00 0 ! ) detH = 0 ) keineAussage m�ogli h.
−10
−5
0
5
10
−5
0
50
10
20
30
40
50
60
xy
f(x,
y)
Abbildung A.48: Graph der Funktion f(x; y) = (1 + sin(x))(1 + y2)Ein Bli k auf die Skizze zeigt, dass die Nulllinien Minimallinien sind, aber es gibt kei-ne isolierten lokalen oder globalen Minima. Dass die Nulllinien Minima sein m�ussen,erkennt man au h aus der Tatsa he, dass f(x; y) � 0 f�ur alle x; y 2 R ist, da(1 + sin(x)) � 0 und (1 + y2) > 0Nun zu g(x; y) = exp(x2 � y2)Nullstellen: keine, da exp(x) > 0 f�ur alle x 2 R.Extremwerte: notwendige Bedingung: rg = ~0

406 ANHANG A. L �OSUNGEN DER AUFGABENrg = �2x exp(�x2 � y2)�2y exp(�x2 � y2) ! = (�2)�xy� exp(�x2 � y2) = �00�) �x0y0� = �00�) �x0y0� = �00� ist station�arer Punkt.zur Hessematrix:�2g�x2 = ��x [�2x exp(�x2 � y2)℄= �2[exp(�x2 � y2) + x(�2x) exp(�x2 � y2)℄= (4x2 � 2) exp(�x2 � y2) :Analog ergibt si h �2g�y2 = (4y2� 2) exp(�x2� y2) und �2g�y�x = 4xy exp(�x2� y2) .) Hg(x; y) = 4x2 � 2 4xy4xy 4y2 � 2 ! exp(�x2�y2)) Hg(0; 0) = �2 00 �2 !)(0; 0) ist Maximum.9. (Partielle Ableitung) Produktregel(a) Zeigen sie, dass f�ur die Gradientenbildung des Produktes zweier skalarer Funk-tionen f(x; y) und g(x; y) folgende Produktregel gilt:~r(fg) = g ~rf + f ~rg :(b) Bere hnen sie damit den Gradienten von h(x; y) = (x2 + y2) exp(�x2 � y2) .L�osung: Sei h(x; y) = f(x; y) � g(x; y)(a) rh = �h�x�h�y ! , wobei �h�x = �f�x � g + f � �g�x und �h�y = �f�y � g + f � �g�y) rh = �f�x � g + f � �g�x�f�y � g + f � �g�y ! = g �f�x�f�y !+ f �g�x�g�y ! = grf + frg (q.e.d.)(b) Mit f(x; y) = x2 + y2 und g(x; y) = exp(�x2 � y2))h(x; y) = (x2 + y2) exp(�x2 � y2)rh = �2x2y� exp(�x2 � y2) + (x2 + y2)��2x exp(�x2 � y2)�2y exp(�x2 � y2)�= 2�xy� exp(�x2 � y2)� 2(x2 + y2)�xy� exp(�x2 � y2)= 2(1� x2 � y2) xy ! exp(�x2 � y2) :

A.18. AUFGABEN ZU KAPITEL 18 407
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0
0.5
1
1.5
2
0
0.5
1
xy
f(x,
y)
Abbildung A.49: Graph der Funktion h(x; y) = (x2 + y2) exp(�x2 � y2)10. (Partielle Ableitung) Tangentialebene und Tangentenglei hungEntwi keln sie die Funktion z = f(x; y) = xy2 � yx3 um den Punkt (1; 2) bis zurlinearen Ordnung na h Taylor. Geometris h betra htet, haben sie damit die Ebenegefunden, die die Funktion f(x; y) im Punkt (1; 2) bestm�ogli h approximiert. Diesist die Tangentialebene T an f in (1; 2). Wenn sie nun no h die TangentialebeneT mit der Ebene z = 2 s hneiden, so erhalten sie die Tangente t an die Kurvexy2 � yx3 = 2. Ohne diese Beziehung na h x oder y aufzul�osen, k�onnen sie somitdie Glei hung der Tangente dieser Kurve im Punkt (1; 2) bestimmen. Wie lautetsie?L�osung: f(x; y) = xy2 � yx3 ) rf = y2 � 3yx22xy � x3 !Entwi klung von f um (1; 2) bis zur linearen Ordnung:flin(x; y) = f(1; 2)+ < rf(1; 2);�x� 1y � 2� >= 2+ < ��23 �;�x� 1y � 2� >= 2� 2x+ 2 + 3y � 6= 3y � 2x� 2d.h. die Ebene 2x � 3y + z = �2 ist Tangentialebene an f(x; y) im Punkt (1; 2) .Die Tangentialebene 2x � 3y + z = �2 ges hnitten mit der Ebene z = 2 ergibt2x+ 3y = �4, y = 23x+ 43 die Tangente an xy2 � yx3 = 2 .

408 ANHANG A. L �OSUNGEN DER AUFGABEN
−2−1.5−1−0.500.511.52
−2
0
2
4
6
−30
−20
−10
0
10
20
30
yx
f(x,
y)
Abbildung A.50: Graph der Funktion f(x; y) = xy2 � yx311. (Partielle Ableitung) Kugelsymmetrie(a) Bere hnen sie f�ur den Betrag des Ortsvektors r = j~rj = px21 + : : :+ x2n denGradienten in 2, 3 und n Dimensionen.(b) Zeigen sie: Falls f(x; y) nur vom Abstand des Punktes (x; y) vom Ursprungabh�angt, d.h. falls f(x; y) = f(px2 + y2) = f(r) mit r =px2 + y2 gilt, dann kannman den Gradienten wie folgt bere hnen:~rf = �f�r ~rr (1.23)mit dem Ortsvektor ~r = �xy� . H�angt ihr Beweis der Beziehung (1.23) von der Zahlder Dimensionen (hier 2) ab, oder gilt (1.23) au h in n Dimensionen?( ) Bere hnen sie den Gradienten f�ur f(x; y) = exp(�x2 � y2) , sowie f�ur das Cou-lombpotential in drei Dimensionen �(x; y; z) = a=px2 + y2 + z2L�osung(a) In zwei Dimensionen ist r = r(x; y) =px2 + y2 der Betrag von ~r = �xy� .rr = �r�x�r�y ! = 0� 2x2px2+y22y2px2+y2 1A = 1px2 + y2�xy� = ~rr.

A.18. AUFGABEN ZU KAPITEL 18 409In drei Dimensionen ist r = r(x; y; z) =px2 + y2 + z2 der Betrag von ~r = 0BB� xyz 1CCA .rr = 0BB� �r�x�r�y�r�z 1CCA = 0BBB� 2x2px2+y2+z22y2px2+y2+z22z2px2+y2+z2 1CCCA = 1px2 + y2 + z2 0BB� xyz 1CCA = ~rrMan erkennt, dass si h diese Bere hnung auf beliebig viele Dimensionen verallge-meinern l�a�t ) rr = ~rr f�ur den n{dimensionalen Ortsvektor ~r .(b) F�ur f(x; y) = f(r)) �f�x = �f�r �r�x und �f�y = �f�r �r�y (Kettenregel!)) rf = �f�x�f�y ! = �f�r � �r�x�f�r � �r�y ! = �f�r �r�x�r�y ! = �f�rrr = �f�r � ~rrWieder ist o�ensi htli h, dass si h diese Beziehung f�ur beliebige Dimensionszahlenverallgemeinern l�a�t.( ) Daf(x; y) = exp(�x2 � y2) = exp[�(x2 + y2)℄ = exp[�(px2 + y2)2℄ = exp(�r2) )rf = �f�r ~rr = �2r exp(�r2)~rr = �2 exp(�r2)~r= �2 exp(�x2 � y2) ��xy� = �2�xy�fUnd f�ur '(x; y; z) = apx2 + y2 + z2 = ar istr' = �'�r � ~rr = � ar3~r = � a(x2 + y2 + z2)3=2 0BB� xyz 1CCA = � ~rr2'12. (Partielle Ableitung) Partielle Di�erentialglei hungen II: Di�usionsglei- hungEine Glei hung der Form �f(x; t)�t = D�2f(x; t)�x2hei�t Di�usionsglei hung (oder W�armeleitungsglei hung).F�ur wel he Di�usionskonstante D erf�ullt die Funktionf(x; t) = 1p2�t exp(�x22t )die Di�usionsglei hung? Skizzieren sie f(x; t) f�ur die Zeiten t = 1, 2, 3 und 4.

410 ANHANG A. L �OSUNGEN DER AUFGABENL�osung:F�ur f(x; t) = 1p2�t exp(�x22t ) ist�f�t = 1p2� � (�1)2pt3 exp(�x22t ) + 1p2�t x22t2 exp(�x22t )= 1p2�t � 1t ��12 + x22t� exp(x22t )= 12 ��1t + x2t2 � f(x; t) und�f�x = �2x2tp2�t exp(�x22t ) = �xt f(x; y) )�2f�x2 = �1t f(x; t)� xt �f�x = �1t f(x; y) + x2t2 f(x; t)= ��1t + x2t2 � f(x; t) :Einsetzen in die Di�usionsglei hung ergibt12 ��1t + x2t2 � f(x; t) = D��1t + x2t2 � f(x; t)) D = 12Dies ist eine zer ie�ende Gau�glo ke deren H�ohe proportional zu 1pt abnimmt undderen Breite �(t) = pt mit pt anw�a hst.
−5 −4 −3 −2 −1 0 1 2 3 4 50
2
4
60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
xt
f(x,
t)
Abbildung A.51: Graph der Funktion f(x; t) = 1p2�t exp(�x22t )