items to specify: 4 - d23rjziej2pu9i.cloudfront.net · valet parking interactions: ... c++, model...
TRANSCRIPT

© Elektrobit (EB) 2016
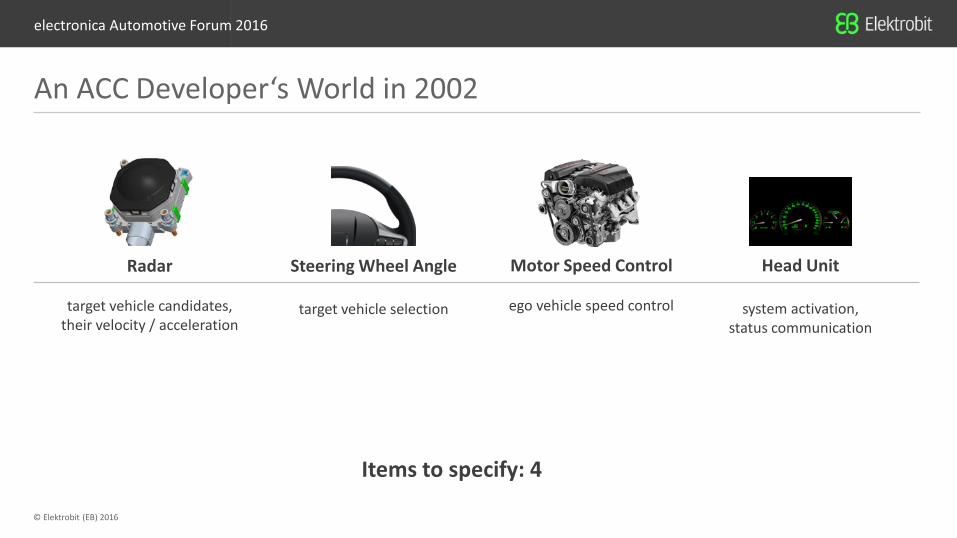
Radar
target vehicle candidates, their velocity / acceleration
Steering Wheel Angle
target vehicle selection
Motor Speed Control
ego vehicle speed control
Head Unit
system activation, status communication
Items to specify: 4
© Elektrobit (EB) 2016 4
0
5
10
15
20
25
30
2002 2004 2007 2010 2013 2015
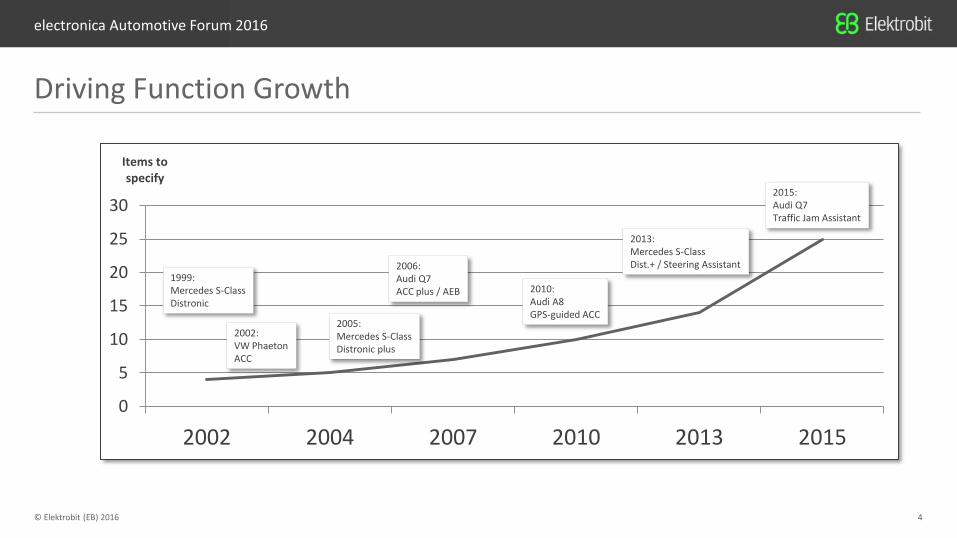
Items to specify
1999: Mercedes S-Class Distronic
2002: VW Phaeton ACC
2005: Mercedes S-Class Distronic plus
2010: Audi A8 GPS-guided ACC
2006: Audi Q7 ACC plus / AEB
2013: Mercedes S-Class Dist.+ / Steering Assistant
2015: Audi Q7 Traffic Jam Assistant

© Elektrobit (EB) 2016 5
Radar
Camera
LIDAR
Sonar
Steering Wheel Sensors
Wheel Speeds
IMU / Gyro
Global Position
Maps
Motor Speed Control
Brake Pressure
Steering Angle Control
Regenerative Braking
Static obstacles
Lanes
Moving objects
Vehicle ego motion
Signs
Trajectory planning &
control
Fail-safe / -degraded
mechanisms
Head Unit
Side Tasks
Functional safety
Redundancies
Items to specify: 24

© Elektrobit (EB) 2016 6
Radar
Camera
LIDAR
Sonar
Steering Wheel Sensors
Wheel Speeds
IMU / Gyro
Global Position
Maps
Motor Speed Control
Brake Pressure
Steering Angle Control
Regenerative Braking
Static obstacles
Lanes
Moving objects
Vehicle ego motion
Signs
Head Unit
Side Tasks
Functional safety
Redundancies
Items to specify: 24
Trajectory planning &
control
Fail-safe / -degraded
mechanisms

© Elektrobit (EB) 2016 7
Radar
Camera
LIDAR
Sonar
Steering Angle
Wheel Speeds
IMU / Gyro Global
Position
Maps
Automated Driving
Automated Emergency Brake
Automated Valet Parking
Interactions: 𝒏 × 𝒎 for 𝒏 sensors, 𝒎 functions

Sensor Data Fusion
© Elektrobit (EB) 2016 8
Radar
Camera
LIDAR
Sonar
Steering Wheel Sensors
Wheel Speeds
IMU/ Gyro
Global Position
Maps
Static obstacles
Lanes
Moving objects
Vehicle ego motion
Signs
Interactions: 𝒏 + 𝒎 + 𝐤 for 𝒏 sensors, 𝒎 functions, 𝒌 abstraction components
Automated Driving
Automated Emergency Brake
Automated Valet Parking

© Elektrobit (EB) 2016 9
Automated Driving
Automated Emergency Brake
Automated Valet Parking
Sensor Data Fusion: From echos to objects and free space
Motion Management: From brake pressure to trajectory control
HMI Management: From buttons and LEDs to user interactions

© Elektrobit (EB) 2016 10
Automated Driving
Automated Emergency Brake
Automated Valet Parking
Well-defined interfaces
Well-defined interfaces
Well-defined interfaces
Well-defined interfaces

11
Project-Level Architecture Best Practices: Reduce complexity
€
Product Family Architecture Best Practices: Re-use specified, developed, industrialized and tested components
€€
Industry-Wide Architecture Best Practices Peer review of functionalities, safety and security mechanisms Lower entry into HAD development No vendor lock-in €€€
© Elektrobit (EB) 2016


Open robinos
• Specifies a reference platform for automated driving up to Level 5 (SAE)
• Freely available and
licensed as Creative Commons
EB robinos • Software modules • for prototyping
in EB Assist ADTF • for rapid embedding
on AUTOSAR • for production
on vehicle ECU
• Developed, tested, verified
according to functional safety standards
13 © Elektrobit (EB) 2016

14
Rapid prototyping
C, C++, Model based
EB robinos
EB Assist ADTF
Desktop PC / Car PC
© Elektrobit (EB) 2016
‒
‒
‒
‒
‒
‒
‒
www.try-eb-robinos.com

15
Rapid prototyping
C, C++, Model based
Embedded prototyping
C, C++
EB robinos
EB Assist ADTF EB tresos solution for AD
Evaluation Hardware Desktop PC / Car PC
© Elektrobit (EB) 2016
‒
‒
‒
•
•
•

16
Rapid prototyping
C, C++, Model based
Embedded prototyping
C, C++
Automotive grade software
EB robinos
EB Assist ADTF EB tresos solution for AD
Domain Control ECU Evaluation Hardware Desktop PC / Car PC
© Elektrobit (EB) 2016

Ve
hic
le A
bst
ract
ion
- S
en
sors
Safety Management
Fun
ctio
n S
pe
cifi
c V
iew
s
Positioning
Object Fusion
Grid Fusion
Road and Lane Fusion
Vehicle Database
Sensor
Data Fusion
Trajectory Control
Longitudinal Control
Lateral Control
Motion Management
HMI Management
Behavior
Behavior
Behavior
Situative Behavior Arbitration
Situation Analysis
Situation Analysis
Situation Analysis
Path Planning
Path Planning
Path Planning V
eh
icle
Ab
stra
ctio
n -
Act
uat
ors
17 © Elektrobit (EB) 2016

18

19
20

21
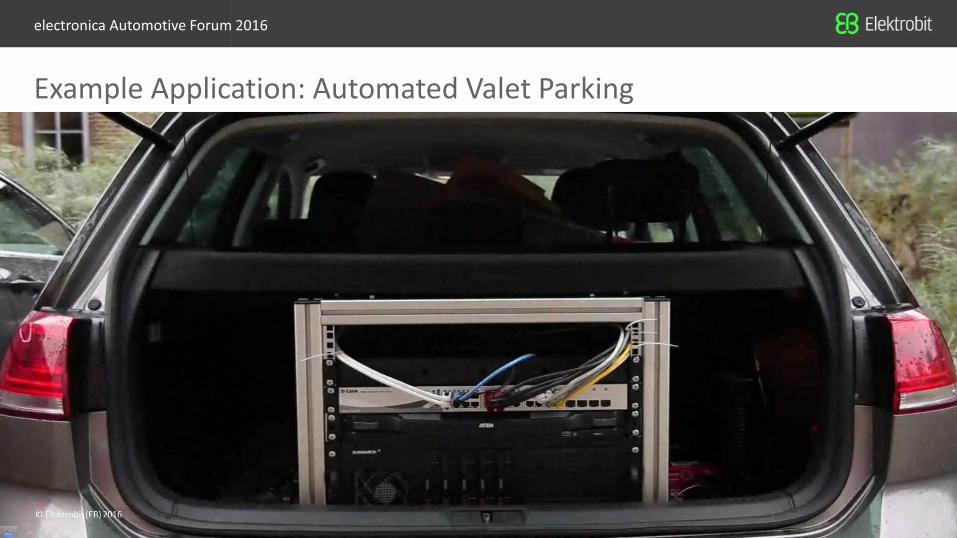
Example Application: Automated Valet Parking

© Elektrobit (EB) 2016 22
Industry-Wide Architecture Best Practices Peer review of functionalities, safety and security mechanisms Lower entry into HAD development No vendor lock-in €€€

Summary
Automated driving systems are complex
Efficient collaboration requires a standard architecture
Open robinos ist the first step open-robinos.com
