java programming for adaptive finite element method ... · vietnamese-german university...
TRANSCRIPT
Vietnamese-German University
Ruhr-University Bochum
Computational Engineering
Java Programming for Adaptive Finite
Element Method applied in two-dimensional
linear contact model
Nguyen Duy Khoi
under guidance of
Mr. Senthil Subramaniam
Dr. Karlheinz Lehner
A Thesis Submitted in Partial Fulfillment
of the Requirements for the Degree of Master of Science
in Computational Engineering
December 25
th 2012

2

3
Abstract Mesh generation is a fundamental step in finite element method since the quality of the
mesh has a great influence on the error of obtained approximated solution. To get a
desired precision, adaptive technique is used to improve the mesh. In this work, h-
refinement which is one of adaptive techniques is applied in linear contact model. Linear
contact model is simulated by Lagrange Multiplier method for non-matching mesh. To
avoid the complexities, linear two-dimensional contact model is only considered. Beside
the fundamental theory of finite element method, computational contact mechanics and
adaptive meshing, this work also tries to cover the practical programming algorithms
which are used during the theories implementation such as mesh generation algorithms,
global matrix assembly algorithm used in finite element method and refinement
algorithm used in adaptive meshing.

4

5
Acknowledgements First of all, I would like to express my deepest thank to Mr. Senthil Subramaniam who is
my industrial supervisor in Bosch company. He suggested the topic and gave me a lot of
research directions for this thesis. Without his help, I cannot finish my work.
In addition, I would like to thank Dr. Karlheinz Lehner who helped me in evaluating this
thesis.
Finally, it is my pleasure to give my special gratitude to Mr. Sudhakar Kunte who gave
me the golden opportunity to do my work in Robert Bosch Engineering and Business
Solutions Vietnam Ltd as well as my colleagues in this company who provided facility
and friendly atmosphere during my internship period.

6

7
Contents
Abstract ............................................................................................................................... 3 Acknowledgements ............................................................................................................. 5 1 Introduction ................................................................................................................. 9 2 Linear Continuum Mechanics ................................................................................... 11
2.1 Kinematics .......................................................................................................... 11 2.2 Stress and equilibrium ........................................................................................ 13
2.2.1 Cauchy’s Theorem ...................................................................................... 13 2.2.2 Balance equation: ........................................................................................ 14
2.3 Boundary conditions .......................................................................................... 15 2.3.1 Dirichlet boundary condition ...................................................................... 15 2.3.2 Newmann boundary condition .................................................................... 15
2.4 Constitutive equation for isotropic materials ..................................................... 16 2.5 Principle of Virtual Work ................................................................................... 17
3 Finite Element Method theory .................................................................................. 19 3.1 FEM in 2D problem ........................................................................................... 19
3.1.1 Plane stress .................................................................................................. 19
3.1.2 Plane strain .................................................................................................. 20 3.1.3 Weak form in two-dimensional problem .................................................... 20
3.2 Discretization ..................................................................................................... 22 3.3 Constant Strain Triangle..................................................................................... 23
3.3.1 Linear shape function .................................................................................. 24 3.3.2 Isoparametric element ................................................................................. 24
3.3.3 Jacobian transformation .............................................................................. 25 3.3.4 Local stiffness matrix .................................................................................. 26 3.3.5 Local load vector......................................................................................... 27
4 Meshing..................................................................................................................... 29 4.1 Delaunay triangulation ....................................................................................... 29
4.1.1 Definition .................................................................................................... 29
4.1.2 Algorithms .................................................................................................. 29 4.1.3 Flow chart ................................................................................................... 31
4.2 2D Triangular Mesh generation ......................................................................... 32 4.2.1 Introduction ................................................................................................. 32 4.2.2 Algorithm .................................................................................................... 32
4.2.3 Flow chart ................................................................................................... 35 5 Frictionless Contact Mechanic .................................................................................. 37
5.1 Gap function for planar contact .......................................................................... 37 5.2 Lagrange Multiplier Method .............................................................................. 39 5.3 Minimum potential energy ................................................................................. 39 5.4 Node to node contact .......................................................................................... 40 5.5 Non-matching mesh contact ............................................................................... 41
6 Adaptive Meshing ..................................................................................................... 45 6.1 Residual based error estimation ......................................................................... 45

8
6.1.1 Variational formulation for boundary value problem (BVP) ..................... 46
6.1.2 Priori error estimation: ................................................................................ 46 6.2 Recovery based error estimation ........................................................................ 47
6.2.1 Error in Constant Strain Element: ............................................................... 47
6.2.2 Recovery based error estimation in Constant Strain Triangle elements ..... 48 6.3 Rivara’s triangular refinement algorithm ........................................................... 50
6.3.1 Algorithm .................................................................................................... 50 6.3.2 Flow chart ................................................................................................... 52
7 Numerical Example .................................................................................................. 53
7.1 Plate with a hole ................................................................................................. 53 7.2 Planar contact model .......................................................................................... 57
8 Future Work .............................................................................................................. 63 References ......................................................................................................................... 65

9
1 Introduction This work presents theory, practice and programming of the adaptive finite element
method which is applied in linear contact model. To avoid the complexities of the three-
dimensional problem, two-dimensional model is only considered. Given an input planar
straight line graph (PSLG), Delaunay triangulation and two-dimensional mesh generation
algorithm are used to create the mesh for the input. Mesh generation is a foundation for
the next calculations where finite element method and computational contact theory are
implemented. Finite element method which is applied here is linear since the linear
material is used and the displacement of the model is very small as an assumption. In this
thesis, the non-matching mesh contact is covered so that the meshes of the two objects in
model are freely generated. The linear contact model is considered here since it does not
require the theory of non-linear continuum mechanics which is not an interest in this
work. To simulation this contact model, the Lagrange Multiplier for non-matching mesh
is applied. In next step, strain energy of each element is calculated base on the
displacement solution found from finite element calculations. Base on this information,
adaptive technique chooses elements which have smallest values and refined them based
on Rivara’s algorithm. The error estimation which is used in this adaptive technique is
recovery based one. This error is evaluated in energy norm.
The outline of the remainder of this thesis is as follows: The theory of linear
continuum mechanics will be reviewed in next section. Base on this theory, two-
dimensional linear finite element method is presented in the section three. In the section
4, meshing related algorithms which are Delaunay triangulation and Jim Ruppert’s two-
dimensional mesh generation are clarified. The Lagrange Multiplier method for non-
matching mesh contact model is introduced in sector 5. Section 6 covers the adaptive
techniques as well as Rivara’s algorithm for h-refinement. The results of programming
are shown in detail in section 7. Finally, some future works are discussed in section 8.

10
11
2 Linear Continuum Mechanics Mechanics is a subject studying motion of a physical object. This motion could be
belongs to one of the following categories:
Particle: the physical object is considered as a point and its motion is only
translation.
Rigid body: the body is not treated as the point anymore. However, it shape
changes during the movement. Mechanics studying this kind of object consider
not only translation but also rotation of the motion.
Deformable body: the shape of the object changes during the motion. Therefore,
relative distance of material points of the object can also change. This change
leads to the deformation in addition to the translation and rotation of the body.
Continuum mechanics covers the motion of deformable body. However, it neglects the
molecular effect of the object. The studying of this motion includes knowing the reason
why the object moves which is called kinetics and understanding the way how it moves
which is called kinematics.
2.1 Kinematics
Kinematics related to modeling the movement of an object in a space. The movement
includes translation, rotation and deformation is represented by displacement. Kinematics
requires the theory of tensor calculus and tensor algebra since displacement and some
quantities can be represented by tensor fields or tensor functions.
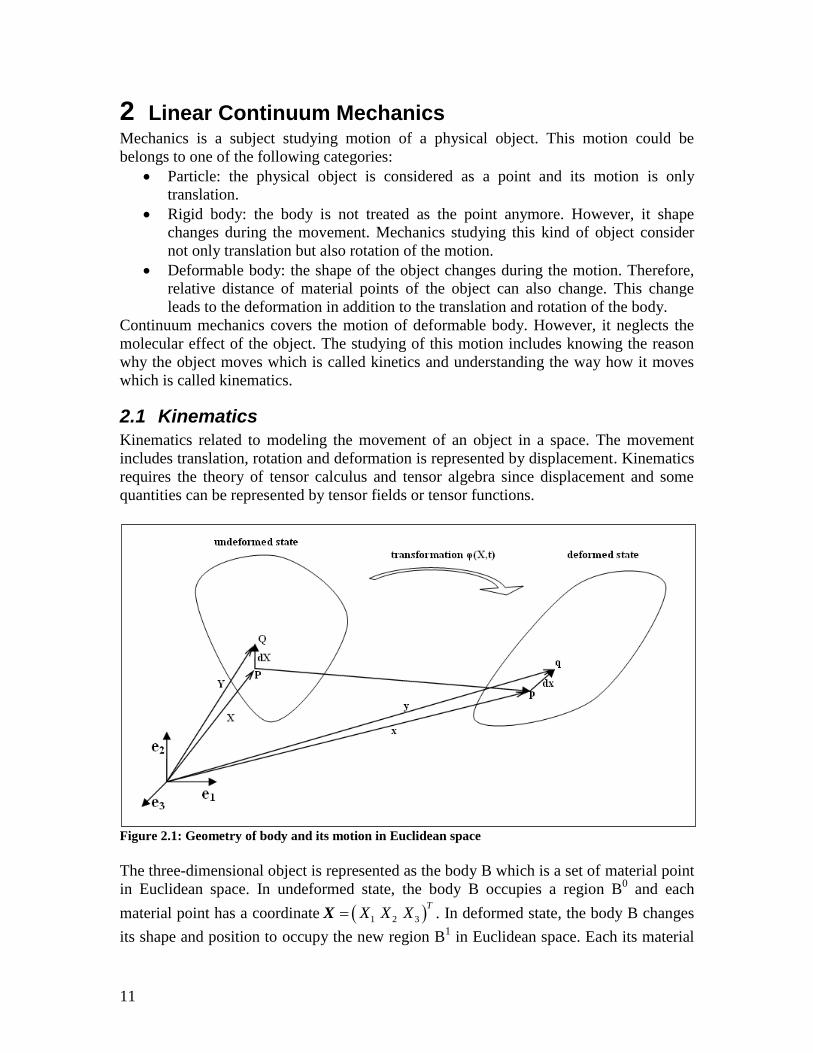
Figure 2.1: Geometry of body and its motion in Euclidean space
The three-dimensional object is represented as the body B which is a set of material point
in Euclidean space. In undeformed state, the body B occupies a region B0 and each
material point has a coordinate 1 2 3
TX X XX . In deformed state, the body B changes
its shape and position to occupy the new region B1 in Euclidean space. Each its material

12
point also changes to the new correspond coordinate 1 2 3
Tx x xx . The illustration of
Figure 2.1 shows that the two material point P and Q which have position vector X and Y
respectively move to new the position p and q which have position vector x and y in
deformed state. The line element dX defined by these two points also changes to new line
element dx. This change is described by the time-dependent mapping , tX
,tx X (2.1)
Base on this mapping, a displacement function which shows the motion of material points
of the body can be define as:
( , ) ( , ) ( ,0) ( , )t t t u x φ X φ X x X X (2.2)
The displacement functions can be written in a fully tensor field form:
1 2 3( , ) ( , ) ( , ) ( , )t u t u t u t 1 2 3u X X e X e X e (2.3)
Or it can be represented by a vector:
1 2 3( , ) , , ,T
t u t u t u t u X X X X (2.4)
Line element can be found:
,,
td d t d
x Xx X u X X X
X X (2.5)
With length of the line element defined as: 22
22
ds d d d
dX d d d
x x x
X X X (2.6)
Then, the relative change of element length dx can be written as: 2 2 1
2 2
T Tds dSd d
E
X u u u u X (2.7)
Where u is the gradient of displacement tensor field:
1 1 1
1 2 3
1,1 1,2 1,3
2 2 22,1 2,2 2,3
1 2 3
3,1 3,2 3,3
3 3 3
1 2 3
( , )( , )
u u u
X X Xu u u
u u utt u u u
X X Xu u u
u u u
X X X
u Xu X
X (2.8)
Green Lagrange Tensor E which is derived from equation (2.7)
1
2
T T E u u u u (2.9)
1/ 2[ ]T u u is the linear part of tensor which is a linear function of displacement u.
Another term is a non-linear function of u. In this work, the non-linear part is assumed
being very small. The Green Lagrange Tensor is considered being a linear function of u
consequently. It can be denoted by ε in linear case and is written in detail form as the
following equation:

13
1,1 1,2 2,1 1,3 3,1
1,2 2,1 2,2 2,3 3,2 , ,
1,3 3,1 2,3 3,2 3,3
1 1
2 2
1 1 1 1
2 2 2 2
1 1
2 2
T
i j j i
u u u u u
u u u u u u u
u u u u u
ε u u (2.10)
It is easy to see that linear stress tensor is symmetric and it can be written as a vector:
11 22 33 12 23 132 2 2T
ε (2.11)
Consequently, the equation (2.10) can be reduced into more compact one:
1
11 2
22
1
333
2
12
3
2 123
13
3 2
3 1
0 0
0 0
0 0
20
2
20
0
X
X
uX
u
uX X
X X
X X
ε (2.12)
2.2 Stress and equilibrium
Forces have an effect of a motion of an object. Therefore, it should be investigated
carefully in mechanics. In continuum mechanics, there are two kinds of forces: Body
forces which depend on the volume of the object such as electromagnetic or gravitational
forces and contact forces which are applied on the surface of the object such as friction or
pressure.
2.2.1 Cauchy’s Theorem
A stress vector is defined by the ratio of f and A when area A approaches to zero
0limA A
ft (2.13)
According theorem of Cauchy, there is a relation between stress tensor and stress vector t
which is shown as:
( , ) ( ) t X n σ X n (2.14)
( )σ X is called Cauchy’s stress tensor and is expanded as the following form:

14
11 12 13
21 22 23
31 32 33
σ (2.15)
According the moment equilibrium for stress components, stress tensor is symmetric:
11 12 13
12 22 23
13 23 33
T
σ σ σ (2.16)
2.2.2 Balance equation:
Motion is a result of forces when they are applied on the object. Therefore, this motion
has to satisfy some conditions which related forces. They are called equilibrium
conditions: *0 0dV dA dV
F b t u (2.17)
Where the first term is the total of body forces, the second term is the total of traction
forces and the final one is the total of inertia forces. Apply Cauchy’s theorem and Gauss
theorem to the second term:
dA dA dV
*t σ n σ (2.18)
Then,
0dV dA dV
b σ u (2.19)
It satisfies for all sub-domain of . Therefore,
0 b σ u (2.20)
It can be written in system of equations:
33,332,321,313
23,232,221,212
13,132,121,111
bu
bu
bu
(2.21)
Or in compact tensorial form
3
2
1
13
23
12
33
22
11
123
312
321
3
2
1
000
000
000
b
b
b
XXX
XXX
XXX
u
u
u
(2.22)
15
2.3 Boundary conditions
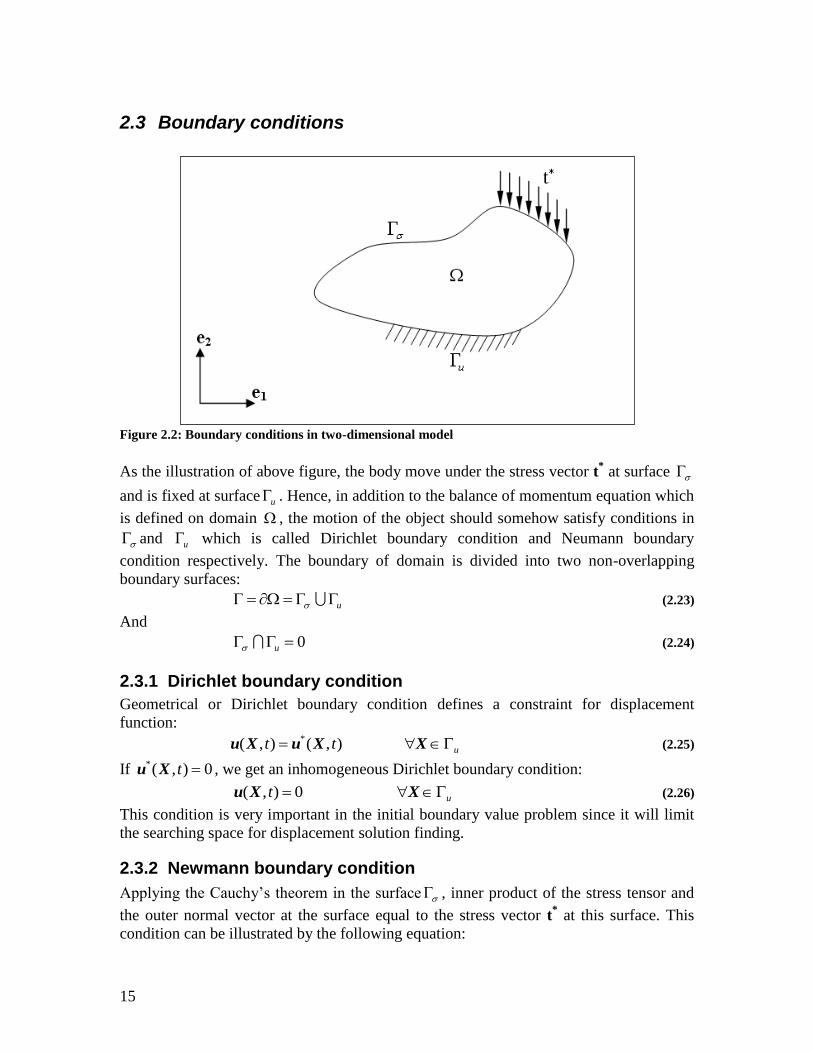
Figure 2.2: Boundary conditions in two-dimensional model
As the illustration of above figure, the body move under the stress vector t* at surface
and is fixed at surface u . Hence, in addition to the balance of momentum equation which
is defined on domain , the motion of the object should somehow satisfy conditions in
and u which is called Dirichlet boundary condition and Neumann boundary
condition respectively. The boundary of domain is divided into two non-overlapping
boundary surfaces:
u (2.23)
And
0 u (2.24)
2.3.1 Dirichlet boundary condition
Geometrical or Dirichlet boundary condition defines a constraint for displacement
function: *( , ) ( , ) ut t u X u X X (2.25)
If *( , ) 0t u X , we get an inhomogeneous Dirichlet boundary condition:
( , ) 0 ut u X X (2.26)
This condition is very important in the initial boundary value problem since it will limit
the searching space for displacement solution finding.
2.3.2 Newmann boundary condition
Applying the Cauchy’s theorem in the surface , inner product of the stress tensor and
the outer normal vector at the surface equal to the stress vector t* at this surface. This
condition can be illustrated by the following equation:

16
( , ) ( , )t t *σ X n t X X (2.27)
It can be written in more detail form:
*
3333223113
*
2323222112
*
1313212111
tnnn
tnnn
tnnn
(2.28)
Or in matrix form:
*
3
*
2
*
1
13
23
12
33
22
11
123
312
321
000
000
000
t
t
t
nnn
nnn
nnn
(2.29)
2.4 Constitutive equation for isotropic materials
The strain and stress of an object have been considered in previous sections. The stress is
a function of displacement u and it is necessary to find the relation of strain and
displacement so that the boundary value problem can be solved. The relation of strain and
stress varies from the property of materials. For linear material, the Hook’s law can be
applied in a general form:
:σ C ε (2.30)
Because the strain tensor and stress tensor is symmetry, C has to satisfy minor symmetry:
jilkjiklijkl CCC (2.31)
It is proved that C also has to satisfy major symmetry:
klijijkl CC (2.32)
Therefore, C matrix has only 21 independent components. To continue reducing the
complexity of the model, the isotropic material is used. For this kind material, the
components in C matrix decrease to only two Lame parameters which are denoted by λ
and μ. Then, the constitutive equation for linear material has a form:
2tr σ ε I ε (2.33)
The inverse form is written as:
1
2 2 3 2tr
ε σ σ I (2.34)
The matrix form of constitutive equation:

17
11 11
22 22
33 33
12 12
23 23
13 13
2 0 0 0
2 0 0 0
2 0 0 0
20 0 0 0 0
20 0 0 0 0
20 0 0 0 0
σ C ε
(2.35)
Or can be represented by a function of E and ν:
11 11
22 22
33 33
12 12
23 23
13 13
1 0 0 0
1 0 0 0
1 0 0 0
1 20 0 0 0 0
2 21 1 21 2
20 0 0 0 02
21 2
0 0 0 0 02
E
σ ε
C
(2.36)
Where E and ν are defined as:
)23(E (2.37)
)(2
(2.38)
2.5 Principle of Virtual Work
Test function for displacement which denoted as u is defined in domain and has to
satisfy the following conditions:
Test function satisfy the Dirichlet boundary condition
( ) 0 u u X X (2.39)
Test function satisfy the field condition sym u ε (2.40)
Test function is infinitesimal
Test function is arbitrary
From the previous section, the balance of force is:
0div u σ b (2.41)
Multiply with test function uand integral the result over the whole domain:
0dV div dV
u u b u σ (2.42)
To derive the second term of above equation, some tensor calculus equation is required:

18
: :
: :
div div div
div div div
u σ u σ u σ u σ u σ
u σ u σ u σ u σ u σ (2.43)
Replace it into the original strong form:
: 0
A B
dV dV div dV dV
u u u b u σ u σ (2.44)
For calculating A, applied the Gauss theorem for the divergence term
A div dV dA dA
u σ u σ n u σ n (2.45)
Apply Newmann boundary condition to this term:
0
A dA dA
*
*
σ n t
u σ n u t (2.46)
The term :u σ can be rewrite into another form and is replaced into B
: : : :
: :
sym sym
B dV dV
u σ u σ u σ ε σ
u σ ε σ (2.47)
Finally, the balance of momentum equation is written in a weak form as the following:
int
:
dyn extW W W
dV dV dV dA
*
u u ε σ u b u t (2.48)
dynW is the virtual work of dynamic forces, intW is the internal virtual work and extW is
the virtual work of external forces.
extdyn WWW int (2.49)
The weak form is equivalent to the strong form. In addition to, weak form can be
approximated by finite element method.

19
3 Finite Element Method theory Finite Element Method is Garlevkin method that reduces the function space of exact
solution to approximated function space where the solution of displacement is
approximated by polynomial functions. The basic function of this polynomial function
space is divided into many piecewise functions if the linear interpolation functions are
used.
3.1 FEM in 2D problem
Characterized by two properties:
The small thickness h compare to the other dimensions, the plane stress state
Infinite dimension of the direction x3, the plane strain state
3.1.1 Plane stress
Because the thickness h is too small, the stress related to the third direction is equal to
zero.
0332313 (3.1)
The strain in third direction:
02313 (3.2)
2211332
(3.3)
Then, the constitutive equation of plane stress is:
12
2211
11
11
12
22
11
22
000
02
02
02
0
(3.4)
It can be reduced to:
12
22
11
12
22
11
22
200
0)(2
0)(2
2
2
(3.5)
Or using the parameters E and :

20
12
22
11
2
12
22
11
22
100
01
01
1
E
(3.6)
3.1.2 Plane strain
0332313 (3.7)
The third direction related components of stress tensor can be determined:
02313 (3.8)
)()(2
221133
(3.9)
Then, the relation of stress and strain tensor is shown as:
12
22
11
12
22
11
200
02
02
(3.10)
Or
12
22
11
12
22
11
22
2100
01
01
211
E
(3.11)
3.1.3 Weak form in two-dimensional problem
:dV dV dV d
*
u u ε σ u b u t
The volume element dV is replaced by multiplying the area element dA by the line
element 3dX . Besides, the three-dimensional Neumann boundary also is divided into two-
dimensional one and thickness coordinate 3dX
2 2 2 2
3 3 3 3
2 2 2 2
:
h h h h
h h h hA A A
A B C D
dX dA dX dA dX dA dX d
*
u u ε σ u b u t (3.12)
The displacement vector, it’s variational and acceleration vector in plane strain and plane
stress are:
1 2 1 1 2 2 1 2
1 2 1 1 2 2 1 2
1 2 1 1 2 2 1 2
( , ) , ,
( , ) , ,
( , ) , ,
T
T
T
X X u X X u X X
X X u X X u X X
X X u X X u X X
u
u
u
(3.13)
Because they do not depend on coordinate 3X , the term A can be calculated:

21
2
3
2
h
hA A
A dX dA hdA u u u u (3.14)
The strain and stress is also independent of 3X since:
111
1
22
22
12
2 1
0
0
2
X
u
uX
X X
ε (3.15)
σ C ε (3.16)
Hence,
2
3
2
h
hA A
B dX dA hdA ε σ ε σ (3.17)
The vector 1 2
Tb bb and are constant to 3X , thus:
2
3
2
h
hA A
C dX dA hdA u b u b (3.18)
Because *
3 0t in two-dimensional model as plane strain or plane stress, the stress vector
at Newmann boundary can be presented by:
* *
1 2
T
t t *
t (3.19)
Then,
2
3
2
h
h
D dX d hd
* *
u t u t (3.20)
The terms A, B, C and D are replaced to original equation, then:
A A A
hdA hdA hdA hd
*
u u ε σ u b u t (3.21)
In more detail form:
dh
t
t
u
udAh
b
b
u
udAhdAh
u
u
u
u
AAA
*
2
*
1
2
1
2
1
2
1
12
22
11
12
22
11
2
1
2
1
2
(3.22)

22
3.2 Discretization
Figure 3.1: Discretization with triangular and quadrangular element
Instead of finding the exactly solution in the whole domain Ω, Finite Element Method is
used to find an approximate solution by dividing the original domain Ω into many
smaller domains Ωe which are triangles or quadrilaterals:
NE
e
e
1
(3.23)
In each element, the principle of virtual work is also satisfied: e
ext
ee
dyn WWW int (3.24)
The process in which the object is divided into element structure is call mesh generation.
There are many mesh generation algorithms which depend on the shape of element. In
this work, the triangular element is used in the finite element method. The triangular
mesh generation algorithm will be introduced in detail in later section.

23
3.3 Constant Strain Triangle
Figure 3.2: Constant Strain Triangle coordinates transformation
There are many kinds of triangular element which depend on the number of nodes and
shape functions of the element. Constant Strain Triangle (CST) is a very basic triangular
element. Its name come from the fact that the strain calculated at a point in this element is
independent to coordinate of the point. The CST has only three nodes and its shape
functions are linear. The transformation from arbitrary triangle in physical coordinate to
standard CST in natural coordinate is illustrated in Figure 3.2. The natural coordinate is
defined base on the areas of triangles iA , which are shown in Figure 3.2, divided by total
area of the triangle A
A
Aii (3.25)
There are some conditions of for the natural coordinate
1,0
11 213321
i
(3.26)
Then, these conditions are reduced to:
12
213
1
10
11010
10
(3.27)
24
3.3.1 Linear shape function
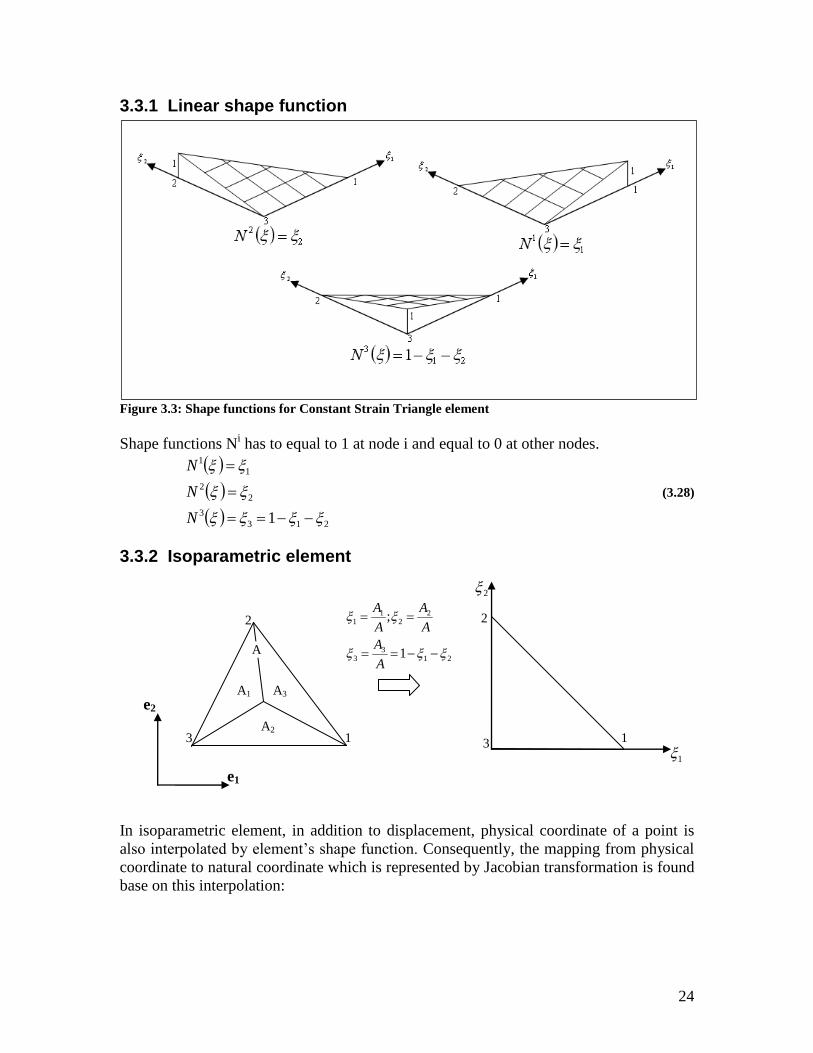
Figure 3.3: Shape functions for Constant Strain Triangle element
Shape functions Ni has to equal to 1 at node i and equal to 0 at other nodes.
213
3
2
2
1
1
1
N
N
N
(3.28)
3.3.2 Isoparametric element
In isoparametric element, in addition to displacement, physical coordinate of a point is
also interpolated by element’s shape function. Consequently, the mapping from physical
coordinate to natural coordinate which is represented by Jacobian transformation is found
base on this interpolation:
e1
e2
1
2
3
1
2
1
2
3
A1 A3
A2
A 21
33
22
11
1
;
A
A
A
A
A
A
25
h e
h e
h e
h e
X ξ X ξ N ξ X
u ξ u ξ N ξ u
u ξ u ξ N ξ u
u ξ u ξ N ξ u
(3.29)
Applied for two dimensions problem with linear interpolation, the physical coordinate is
approximated as:
3
121
2
12
1
11
3
121
32
121
21
121
1
1
)1(
,,,
eee
eee
XXX
XNXNXNX
(3.30)
3
221
2
22
1
21
3
221
32
221
21
221
1
2
)1(
,,,
eee
eee
XXX
XNXNXNX
(3.31)
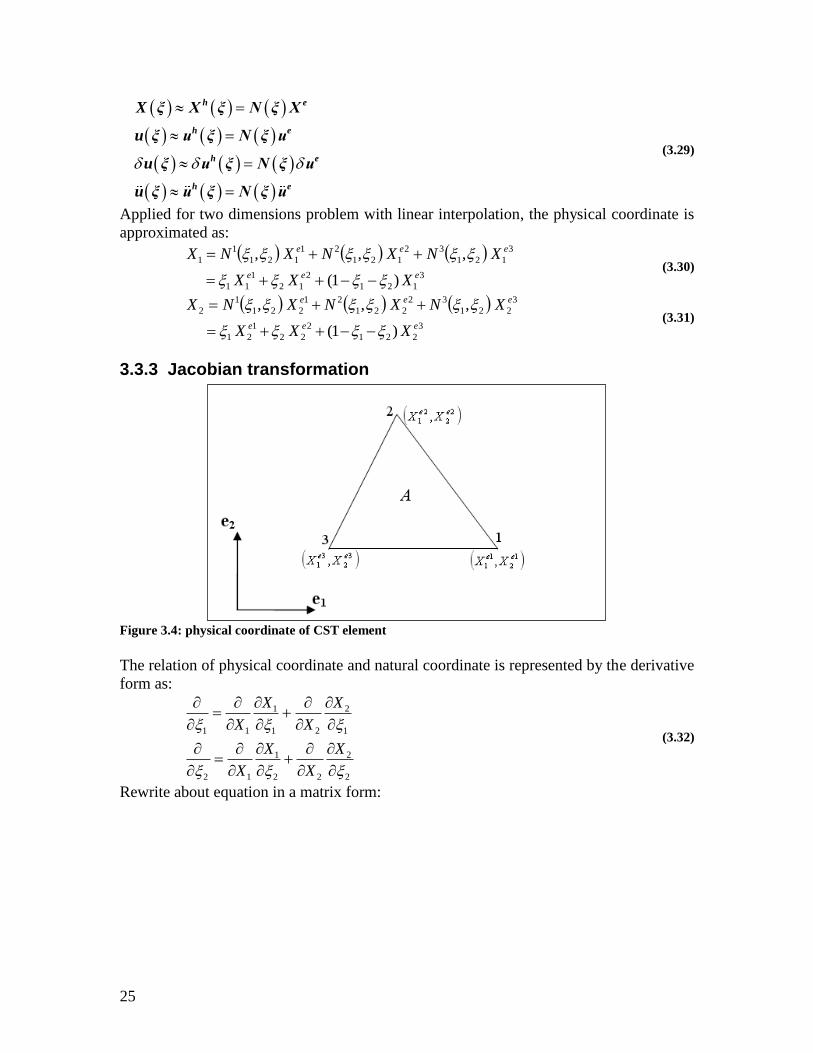
3.3.3 Jacobian transformation
Figure 3.4: physical coordinate of CST element
The relation of physical coordinate and natural coordinate is represented by the derivative
form as:
2
2
22
1
12
1
2
21
1
11
X
X
X
X
X
X
X
X (3.32)
Rewrite about equation in a matrix form:

26
X
J
X
X
XX
XX
2
1
2
2
2
1
1
2
1
1
2
1
(3.33)
Where J ξ is the Jacobian matrix which show the relation of physical coordinate and
natural coordinate. Its component can be calculated as the following:
3
2
2
2
2
222
3
1
2
1
2
121
3
2
1
2
1
212
3
1
1
1
1
111
eeee
eeee
XXX
JXXX
J
XXX
JXXX
J
(3.34)
Determinant of Jacobian matrix:
1 3 2 3 2 3 1 3
1 1 2 2 1 1 2 2 2e e e e e e e eX X X X X X X X A J ξ (3.35)
With A is the area of the considered triangle element 2 3 3 1
1 2 2 2 2 2 2 2
1 2 1 1
3 2 1 3
1 1 1 1 2 1 1 1
2 2 2 1
1 1
2 2
1 1
2 2
e e e e
e e e e
X X X X X X
X A X A
X X X X X X
X A X A
J J
J J
(3.36)
3.3.4 Local stiffness matrix
The element stiffness matrix or local stiffness matrix 211
1 2
0 0
T h d d
e
k B C B J (3.37)
Where:
iiii
ii
ii
i
NX
NX
NX
NX
NX
NX
NX
NX
B
2;
1
21;
1
12;
2
21;
2
1
2;
2
21;
2
1
2;
1
21;
1
1
0
0
(3.38)
Therefore,
1 2 1 2
1 1 1 1
1 2 1 2
2 2 2 2
1 1 2 2 1 2 1 2
2 1 2 1 2 2 1 1
0 0 0
0 0 0
X X X X
X X X X
X X X X X X X X
B (3.39)
Replace the Jacobian transformation to B matrix, we get:

27
2 3 3 1 1 2
2 2 2 2 2 2
3 2 1 3 2 1
1 1 1 1 1 1
3 2 2 3 1 3 3 1 2 1 1 2
1 1 2 2 1 1 2 2 1 1 2 2
0 0 01
0 0 02
e e e e e e
e e e e e e
e e e e e e e e e e e e
X X X X X X
X X X X X XA
X X X X X X X X X X X X
B (3.40)
Because:
2
11
0
2
1
0
1
2
dd (3.41)
Replacing this integral into the element stiffness equation leads to the result:
12
2
T Ah Ah e Tk B C B B C B (3.42)
In matrix form, the local matrix can be represented as:
11 12 13
21 22 23
31 32 33
e e e
e e e
e e e
k k k
k k k
k k k
ek (3.43)
The local stiffness matrix is symmetric due to the symmetry of B matrix
3.3.5 Local load vector
Figure 3.5: the components of the nodal forces of an element
In this part, the external element energy is considered: e
extW hd
*
e eu t u r (3.44)
With the local load vector is the total of nodal load of three edges of CST element:
1 2 3
e e e
e Γ Γ Γr f f f (3.45)
With the unit thickness h = 1, the edge nodal loads1
e
Γf , 2
e
Γf and 3
e
Γf depend on the shape
functions and traction forces applied in appropriate edge. The traction forces for each
edge are interpolated as:

28
2 3 1 3 1 2
2 3 1 3 1 2
(1 ) (1 ) (1 )
(1 ) (1 ) (1 )
x x x x x x
y y y y y y
t t t t t t
t t t t t t
1 2 3Γ Γ Γt t t (3.46)
With these traction forces in addition to linear shape functions of CST element, the nodal
force of each element can be calculated as the following equations:
12 3 2 31
1
2 3 2 30
2 3
2 3
00 0
00 0
(1 ) 21 0
(1 ) 20 1 6
20
20
x x x x
y y y y
x x
y y
t t t tll d
t t t t
t t
t t
1
e
Γf (3.47)
1 3
1 3
11 3 2
2
1 30
1 3
1 3
21 0
20 1
(1 ) 00 0
(1 ) 00 0 6
20
20
x x
y y
x x
y y
x x
y y
t t
t t
t t ll d
t t
t t
t t
2
e
Γf (3.48)
1 2
1 2
11 2 1 23
3
1 2 1 20
1 0 2
0 1 2
(1 )0 2
(1 )0 26
0 0 0
0 0 0
x x
y y
x x x x
y y y y
t t
t t
t t t tll d
t t t t
3
e
Γf (3.49)
For example, a constant traction force is applied in edge 3 (it means that xxx ttt 21 and
yyy ttt 21 ), the nodal force of this edge is reduced to:
3
2
0
0
x
y
x
y
t
t
tl
t
3
e
Γf (3.50)

29
4 Meshing As the previous section, a high quality mesh takes a very important role in Finite Element
Method. There are many algorithms as well as heuristics to find the good mesh such as
quadtree, advancing front or Delaunay triangulation. In this section, the Delaunay
triangulation is introduced as the first step of mesh generation which creates the “rough”
mesh for an input data. Then, a mesh generation based on maintaining Delaunay
triangulation is used to modify this mesh with a purpose that is improving the quality of
the mesh.
4.1 Delaunay triangulation
4.1.1 Definition
Was introduced by Boris Delaunay in 1934, Delaunay triangulation is used broadly for
many robust two-dimension mesh generators. As in the Figure 4.1, Delaunay
triangulation for a set of input point S is a set of triangles such that each circumcircle of
each its element does not contain any vertex of S inside.
Figure 4.1: input points, Delaunay triangulation and the corresponding empty circumcircle
Delaunay triangulation has many important characteristics that are valuable for finite
element method. The most interesting property is that this triangulation maximizes the
minimum angle of the output triangles. In other words, the minimum angle of the output
triangles which is shown in the middle figure in Figure 4.1 has a largest value.
4.1.2 Algorithms
Base on the definition of Delaunay triangulation, a basic algorithm for this triangulation
can be easily found. For a set of input point S, every possible triangle of triple of points
of S that contain no point in it’s interior will belong to Delaunay triangulation. However,
this original algorithm requires much time to be executed. For example, for an input
includes one hundred points, it will take 100 * 99 * 98 times to check if a triangle created
by the possible triple of points contains any input point or not. In this work, the authors
implement another algorithm which is illustrated in the following figures:
30
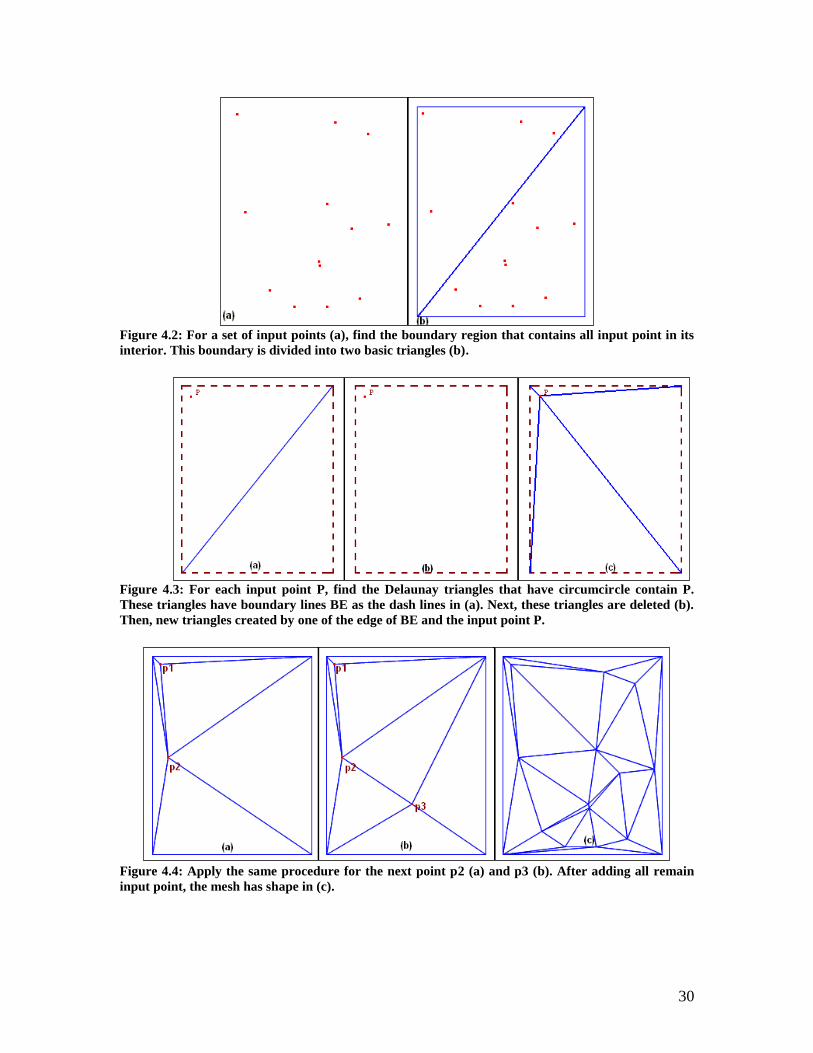
Figure 4.2: For a set of input points (a), find the boundary region that contains all input point in its
interior. This boundary is divided into two basic triangles (b).
Figure 4.3: For each input point P, find the Delaunay triangles that have circumcircle contain P.
These triangles have boundary lines BE as the dash lines in (a). Next, these triangles are deleted (b).
Then, new triangles created by one of the edge of BE and the input point P.
Figure 4.4: Apply the same procedure for the next point p2 (a) and p3 (b). After adding all remain
input point, the mesh has shape in (c).

31
Figure 4.5: The final mesh after removing boundary edges and related triangles.
4.1.3 Flow chart
Call S is the set of input point, T is the output triangles
Check if set
of input point
S is empty
N
Y
Start
Initialize T including
two boundary triangle
which contain all input
point
- Get and remove a point P from S
- Find the set of triangles I in T which
have circumcircles contain input point P
- Find the set of boundary edge E created
by I
- Remove I from T
- Create new triangles by an edge got
from E and P. Add these triangles to T
Finish
Remove boundary
triangles
32
4.2 2D Triangular Mesh generation
4.2.1 Introduction
Given an input planar straight line graph (PSLG), mesh generation creates the mesh for
the input. In this work, we focus on the mesh generation based on Delaunay triangulation.
It means that the mesh has to be the Delaunay triangulation and has to satisfy two
additional requirements:
That are all segments (edges of input) must be in the output edge of triangles
All angles of the output triangles must be larger than α (0<=α<=20).
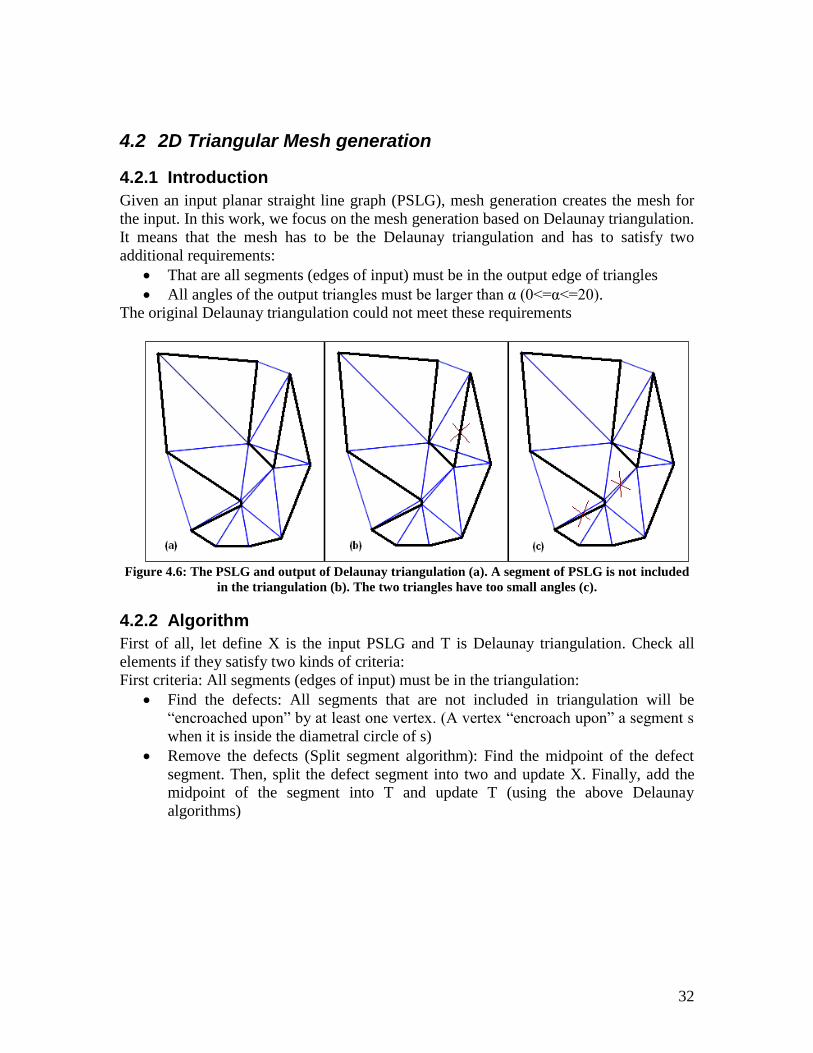
The original Delaunay triangulation could not meet these requirements
Figure 4.6: The PSLG and output of Delaunay triangulation (a). A segment of PSLG is not included
in the triangulation (b). The two triangles have too small angles (c).
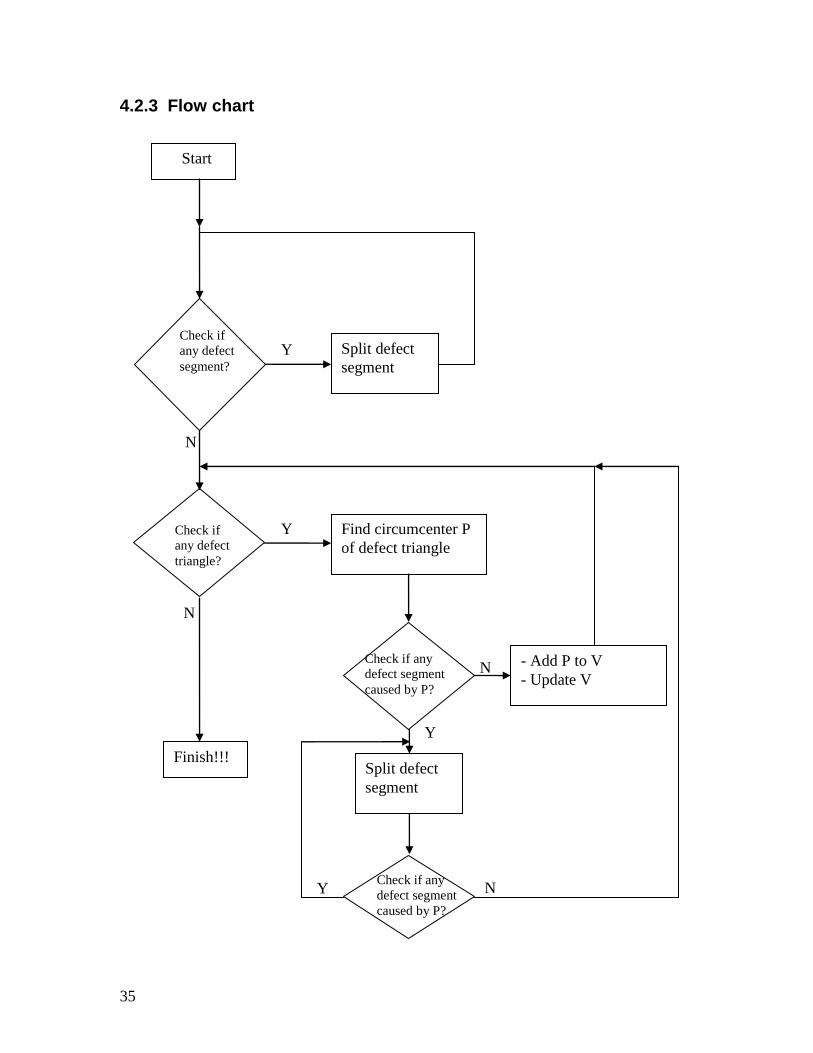
4.2.2 Algorithm
First of all, let define X is the input PSLG and T is Delaunay triangulation. Check all
elements if they satisfy two kinds of criteria:
First criteria: All segments (edges of input) must be in the triangulation:
Find the defects: All segments that are not included in triangulation will be
“encroached upon” by at least one vertex. (A vertex “encroach upon” a segment s
when it is inside the diametral circle of s)
Remove the defects (Split segment algorithm): Find the midpoint of the defect
segment. Then, split the defect segment into two and update X. Finally, add the
midpoint of the segment into T and update T (using the above Delaunay
algorithms)

33
Figure 4.7: Because the vertex a, b encroach upon s, s have to be divided by the midpoint c in (a). For
adding new point c, apply the same adding point algorithm in Delaunay triangulation. It means that
finding the boundary edges of affected triangles and removing affected triangles (b). Then, the new
triangles are created by boundary edges and the mid point c (c).
Second criteria: All angles of triangles must be larger than α (0<=α<=20)
Find the defects: Calculate all angles of the triangulation, find the defect triangles
that have an angle smaller than α.
Remove the defects: Find the circumcenter p of the defect triangle. If p encroach
upon any segment, split the segment (using the algorithm of i), then update X and
T. If p does not encroach upon any segment, add p to T and update T
Figure 4.8: The dark triangle needs to be modified because it has too small angle (it is called skinny).
The circumcenter of defect triangle is c and c encroaches upon s1 and s2 which have mid point c1
and c2 respectively (a). Therefore, instead of adding new point c, the segment s1 and s2 should be
divided by c1 and c2 using the same algorithm of previous figure (b).

34
Figure 4.9: Another case of skinny triangle which is the dark color triangle in (a). However, this case
is different from the previous one because c does not encroach upon any segment. In this situation, c
can be added directly to the mesh by using the Denaulay adding point algorithm (b).
Figure 4.10: Execute the algorithm till there is no defect in the mesh (a). After removing the triangles
that are outside the PSLG region, the final result mesh for input PSLG is obtained in (b)
35
4.2.3 Flow chart
Check if
any defect
segment?
Split defect
segment Y
Check if
any defect
triangle?
Y
N
Find circumcenter P
of defect triangle
Check if any
defect segment
caused by P?
N - Add P to V
- Update V
Split defect
segment
Y
N
Finish!!!
Start
Check if any
defect segment
caused by P?
N Y

36

37
5 Frictionless Contact Mechanic
5.1 Gap function for planar contact
Figure 5.1: Deformation of two objects in two-dimensional space
At time t = 0, two bodies occupy the region 1 and 1 . After deforming, the two bodies
changed their shape and occupy the new regions 1 1φ and 22φ . A point of object 1
which has a position X1 at t = 0 and a point belong to object 2 which have position X
2
change to new position x1 and x
2 respectively at deformed state. c is the contact area
where all points of two objects have same position.
In contact model, one of these two object is chosen be a master object and another is
called slave object. x2 is arbitrary point in contact surface of master object. Then, we find
a point that belongs to slave object and has the minimum distance to x2, it is the point 1
x
which is illustrated in Figure 5.1. Then, the normal gap in contact surface is defined by:
( )Ng 2 1 1x x n (5.1)
1n is the normal vector of
1φ at point 1
x
Beside the normal gap function, we also have tangential gap function. However, it is
considered being very small and being neglected in this work.
The normal gap function can be represented as a function of displacement:
( ) ( ) (( ) ( ))
( ) 0
N
i
g
g
2 1 1 2 2 1 1 1
2 1 1
u x x n X u X u n
u u n (5.2)
ig is initial gap and ( )ig 2 1 1X X n
Base on that, the variation of the gap functions can be determined as:
( )Ng 2 1 1u u n (5.3)
2u is the test function or the variational of 2
u
38
1u is the test function or the variational of 1
u
Condition for gap function and normal pressure on contact area:
0
0
0
NN
N
N
pg
p
g
(5.4)
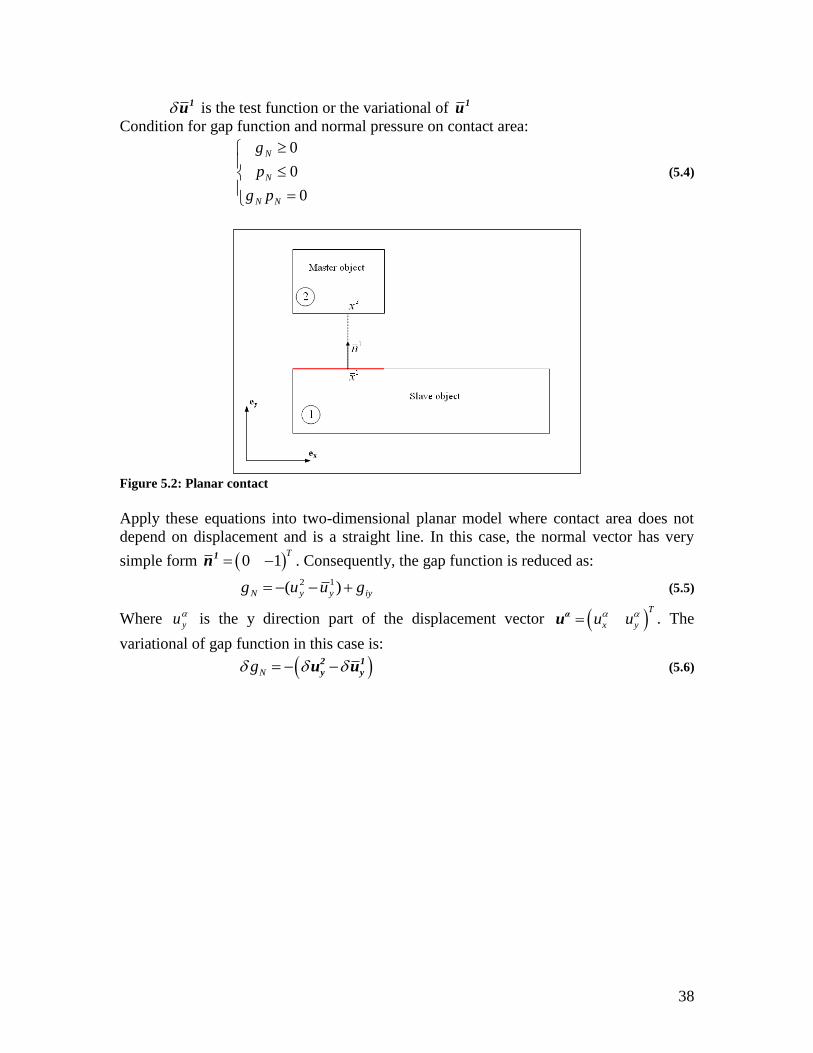
Figure 5.2: Planar contact
Apply these equations into two-dimensional planar model where contact area does not
depend on displacement and is a straight line. In this case, the normal vector has very
simple form 0 1T
1n . Consequently, the gap function is reduced as:
iyyyN guug )( 12 (5.5)
Where yu is the y direction part of the displacement vector
T
x yu u αu . The
variational of gap function in this case is:
Ng 2 1
y yu u (5.6)
39
5.2 Lagrange Multiplier Method
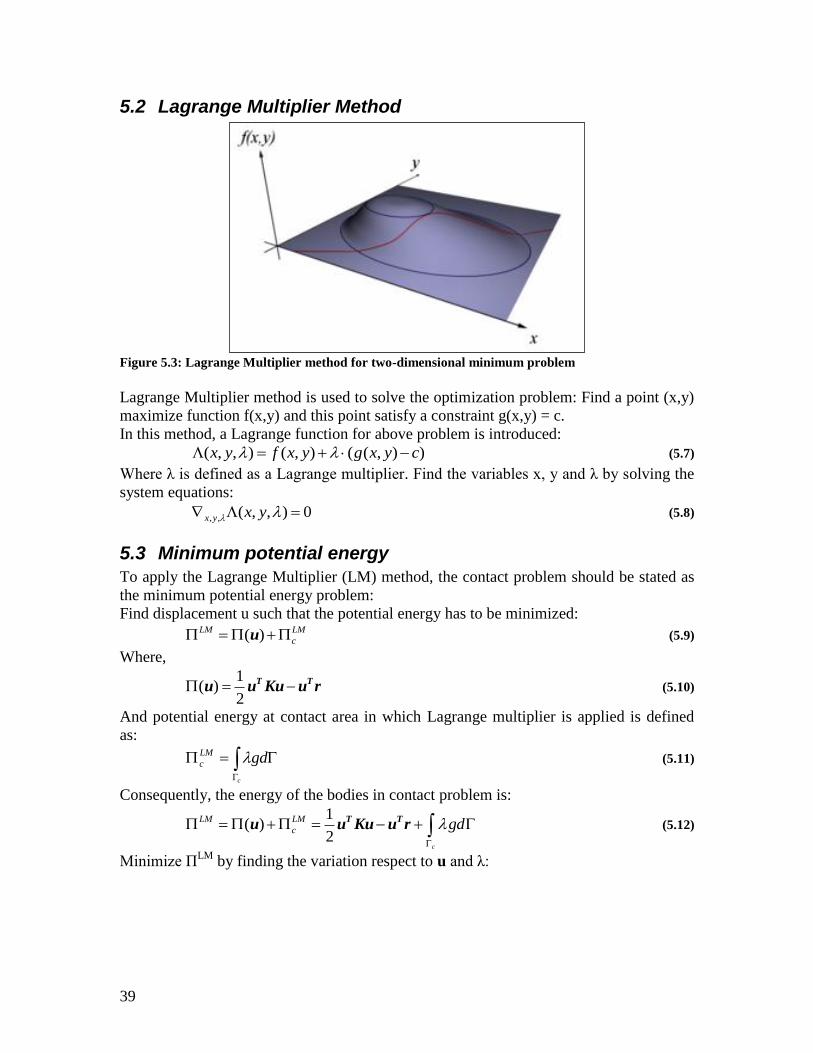
Figure 5.3: Lagrange Multiplier method for two-dimensional minimum problem
Lagrange Multiplier method is used to solve the optimization problem: Find a point (x,y)
maximize function f(x,y) and this point satisfy a constraint g(x,y) = c.
In this method, a Lagrange function for above problem is introduced:
)),((),(),,( cyxgyxfyx (5.7)
Where λ is defined as a Lagrange multiplier. Find the variables x, y and λ by solving the
system equations:
0),,(,, yxyx (5.8)
5.3 Minimum potential energy
To apply the Lagrange Multiplier (LM) method, the contact problem should be stated as
the minimum potential energy problem:
Find displacement u such that the potential energy has to be minimized:
( )LM LM
c u (5.9)
Where,
1( )
2 T T
u u Ku u r (5.10)
And potential energy at contact area in which Lagrange multiplier is applied is defined
as:
c
gdLM
c (5.11)
Consequently, the energy of the bodies in contact problem is:
1( )
2c
LM LM
c gd
T T
u u Ku u r (5.12)
Minimize ПLM
by finding the variation respect to u and λ:

40
2 1
2 1
( ) 0
( ) 0
c c
c c
y y
y y iy
gd u u d
gd u u g d
T T T Tu Ku u r u Ku u r
(5.13)
The variations u and λ are found by solving above system of equation. The stiffness
global matrix K and load vector r can be determined by the method introduced in
previous sections. However, the remains require the interpolation of Lagrange multiplier
function and gap function which depends on the discretization of contact surface. There
are two types of contact surface:
Node to node contact
Non-matching mesh contact
5.4 Node to node contact
Figure 5.4: Node-to-node contact problem
In node-to-node contact, all nodes of the two meshes have to be in the same position in
contact area. Therefore, the surface domain and the discretization of these domains of
two objects is the same. This will be a big advantage for many calculations in contact
model which will be made clear later. However, in this contact, one mesh depends on
another mesh. Therefore, only one of two meshes is able to be refined in adaptive
technique. Because of the same discretization of two contact surefaces, function λ,
displacement functions and initial gap function are interpolated as:
P
iyPPiy
J
yJJy
I
yIIy
K
KK
J
yJJy
I
yIIy
K
KK
gNg
uNuuNuM
uNuuNuM
)(
)()()(
)()()(
1122
1122
(5.14)
Replace to the equation of variational of contact energy:

41
2
1
( ) ( )
( ) ( )
c
ii
c c
c
iic
n
K K T yI
i I K
n
K K J yJ
i J K
gd M N J d u
M N J d u
(5.15)
In node-to-node contact, the basic functions MK, NI, NJ are defined in the same domain
and same discretization. Therefore, the integral terms can be easily calculated. Because
the shape functions are chosen as linear functions, we get the following result:
2 12 1 2 1
1 2 1 26 6
c c
c
i i
n nT Ti i
i yi i yi
i i
M M
L Lgd u u
T T Tλ M u u M λ (5.16)
M is a global matrix which is assembled from Mi. Apply the same procedure for
constraint equation:
2 12 1 2 1 2 1
1 2 1 2 1 26 6 6
c c c
c
i i i
n n nT T Ti i i
i yi i yi i iyi
i i i
M M M
L L Lgd u u g
T T
iyλ Mu λ Gg
(5.17)
Replacing into the original system equation leads to:
0
0
c
c
gd
gd
T T T T T T
T T
iy
u Ku u r u Ku u r u M λ
λ Mu λ Gg (5.18)
Above system equation have to be satisfied for all u and λ . Finally, this system of
equation can be rewritten in the matrix form:
T
iy
ruK -M
-Ggλ-M 0 (5.19)
By solving this equation, we will get displacement vector u and Lagrange Multiplier
vector λ which also is the pressure at nodes.
5.5 Non-matching mesh contact
In non-marching mesh contact, the discretizations of the two contact surfaces are
different. Therefore, the gap function which depends on displacement of the both contact
surface cannot be determined by the way as in node-to-node contact. Mortar method is
used for this problem. In this method, an intermediate surface is defined and the Lagrange
multipliers function will be approximated on this surface.
42
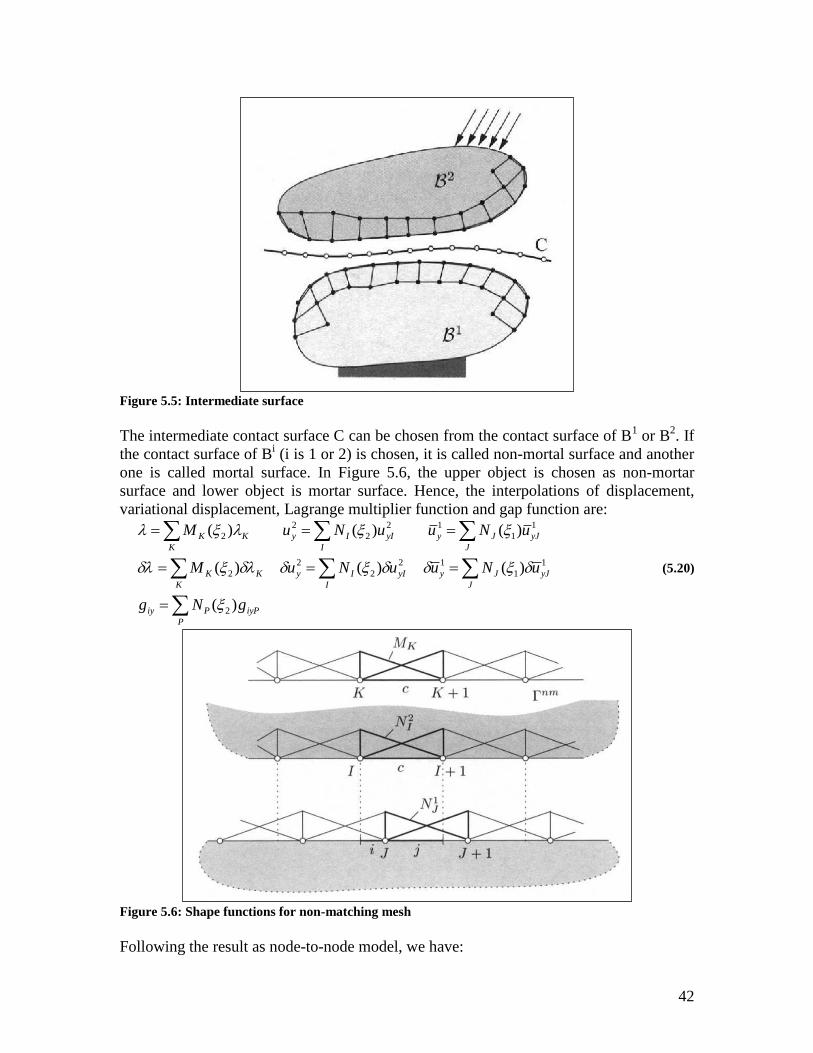
Figure 5.5: Intermediate surface
The intermediate contact surface C can be chosen from the contact surface of B1 or B
2. If
the contact surface of Bi (i is 1 or 2) is chosen, it is called non-mortal surface and another
one is called mortal surface. In Figure 5.6, the upper object is chosen as non-mortar
surface and lower object is mortar surface. Hence, the interpolations of displacement,
variational displacement, Lagrange multiplier function and gap function are:
P
iyPPiy
J
yJJy
I
yIIy
K
KK
J
yJJy
I
yIIy
K
KK
gNg
uNuuNuM
uNuuNuM
)(
)()()(
)()()(
2
1
1
12
2
2
2
1
1
12
2
2
2
(5.20)
Figure 5.6: Shape functions for non-matching mesh
Following the result as node-to-node model, we have:

43
c
ic
i
c
ic
i
c
n
i J K
yJJKK
n
i I K
yITKK
udJNM
udJNMgd
1
212
2
222
)()(
)()(
(5.21)
2 1c c
c
n nT T
i yi i yi
i i
gd u u
1 2 T T T
i iM M λ M u u M λ (5.22)
1
iM can be easily calculated because the shape function MK and NI are defined in the
same domain. With linear basic function, 1
iM in contact element i is determined as:
21 11 1 1 2 12
2 2 2 1 2 2 2
2 1 2 2 21 1
212 2 2 2 1
1 2 2 2
2 2 2 2 21
1( ) ( )
4 2
(1 )(1 ) (1 )(1 )1
(1 )(1 ) (1 )(1 )4 2
yi
K K I yI i i
I K yi
yi
i i
yi
N N N N uLM N J d u d
N N N N u
uLd
u
1iM
(5.23)
With: 1
2 2 2 2
2
2 2 2 21
(1 )(1 ) (1 )(1 ) 2 11
(1 )(1 ) (1 )(1 ) 1 24 2 6
L Ld
1
iM (5.24)
Calculating 2
iM is more complicated because the discretization of two domains is
different. For example, to calculate 2
iM in contact element c, we need to divide the
original element into two mortar segments i and j (please refer to above figure). Then, we
calculate 2
iM in each mortar segment and sum all results to get 2
iM :
J K
yJjjjJjKKj
J K
yJiiiJiKKi
J K
yJJKK
udJNM
udJNMudJNM
ij
iiic
i
1
1
1
12
1
1
1
12
1
212
))(())((
))(())(()()(
(5.25)
Apply the same procedure for constraint equation
2 2 12 1 2 1
1 2 1 26 6
c c c
c
n n nT T Ti i
i yi i i yi i iyi
i i i
L Lgd u M u g
1 1i iM M
(5.26)
Finally, we get the system of equation:
T
iy
ruK -M
-Ggλ-M 0 (5.27)
where global matrix M can be assembled from element matrix 1
iM and 2
iM and global
matrix G can be assembled from element matrix 1
iM

44

45
6 Adaptive Meshing Instead of finding the exact solution, FEM try to find an approximated solution with
minimum error. This error depends on the mesh of the model. The mesh should be
“good” enough so that the result with desired accuracy is obtained. The Adaptive Finite
Element techniques are used to find a quality mesh for finite element method with
minimized calculation cost. This technique should be automatic, efficient and robust so
that it can be applied for many models. The basis operations of Adaptive method is trying
to change the mesh by refining, coarsening or relocating it’s structure or adjust the
number of degree of freedom of basic function. Base on these procedures, adaptive
procedures can be classified into three categories:
P method: in this method, the polynomial degree of basic function is adjusted to
improve to precision of the finite element method.
R method: the number of element of the mesh is kept but its structure is relocated.
H method: the mesh is optimized due to refining or coarsening its element.
These methods can be applied in single or in combination for improving the accuracy of
approximated solution. P method is the most powerful in many models. Otherwise, h-
method is the most popular refinement.
In this work, H refinement is used due to its popularity. The simplest way to implement h
refinement is refining the whole mesh if the accuracy of solution has not reached to
desired value. However, it requires much calculation effort. In fact, there are some
regions of the mesh do not need to be refined. Therefore, the two basic operations of this
technique are finding the regions of element that need to be refined and refining these
regions. Both of these operations will be introduced in this section.
The first operation needs an error evaluation for elements. There are two kinds of error
evaluation:
Residual based: the error of the approximated solution is estimated directly by the
norm: e hu u .
Recovery based: was introduced by Zienkiewicz and Zhu in 1987. Instead of
estimating e hu u , the recovery solution *u which is better than hu is found
first. Then, the approximated error *e *
hu u is determined.
6.1 Residual based error estimation
Discretization is the key step for Finite Element Method. However, it leads to
interpolation error in approximated solution. There are two kinds of error: prior error and
posteriori error. Evaluation of this error is used to steer the adaptive meshing scheme.
Two important requirements of the error estimation are reliability and efficiency.
Reliability is that the estimation has to reach to desired precision and efficiency means
that the computational cost for this work should be acceptable. Normally, the error can
be calculated by hu u and it has to satisfy
toluue h (6.1)
Where u is the exact solution, uh is the approximate solution, tol is tolerance which is
chosen very small usually. In practical model, exact analytical solution u can not be

46
found. Therefore, in optimization problem, instead of minimize the error e, we try to
minimized the tolerance tol while keeping the constraint (6.1).
6.1.1 Variational formulation for boundary value problem (BVP)
For simplification, the two-dimensional model or Poisson’s equation with Dirichlet
boundary u and Newmann boundary is considered here. The model can be
represented as a boundary value problem
0 uand
u f x u x
n u g x (6.2)
Let define V as Sobolev space of functions which belong to function space H1 and
satisfies Dirichlet boundary condition:
: 0 uon 1V v H v (6.3)
Consequently, the variational formulation for above boundary value problem can be
represented as finding a function u in V such that:
( , ) ( )a l u v v v V (6.4)
Where a(u,v) is bilinear form of function u, v and l(v) is linear functional. Both of terms
are defined in H1 as:
( , )a d
u v u v (6.5)
( )l d d
v f v g v (6.6)
Then, energy norm based on bilinear form is defined as:
,E
av v v (6.7)
6.1.2 Priori error estimation:
Usually, we cannot solve BVP since V is very complicated. Therefore, in Galerkin
method, V is approximated by Vh. Now, our problem is finding the approximated
solution uh in Vh such that:
,a lh h hu v v (6.8)
This approximation will lead an interpolation error:
e hu u (6.9)
This error relate to bilinear form of elliptic linear model. As Lax-Milgram theorem, this
bilinear form has to be bounded as:
, ,V V
a M v w v w v w V V (6.10)
2
,V
a v v v v V (6.11)
Follow the Cea’s Lemma optimality condition for elliptic linear model:
infh h
V Vv V
M
h hu u u u (6.12)
With 1V H , the norm for error is defined as:
47
1 1p
p
H Hch
hu u u (6.13)
6.2 Recovery based error estimation
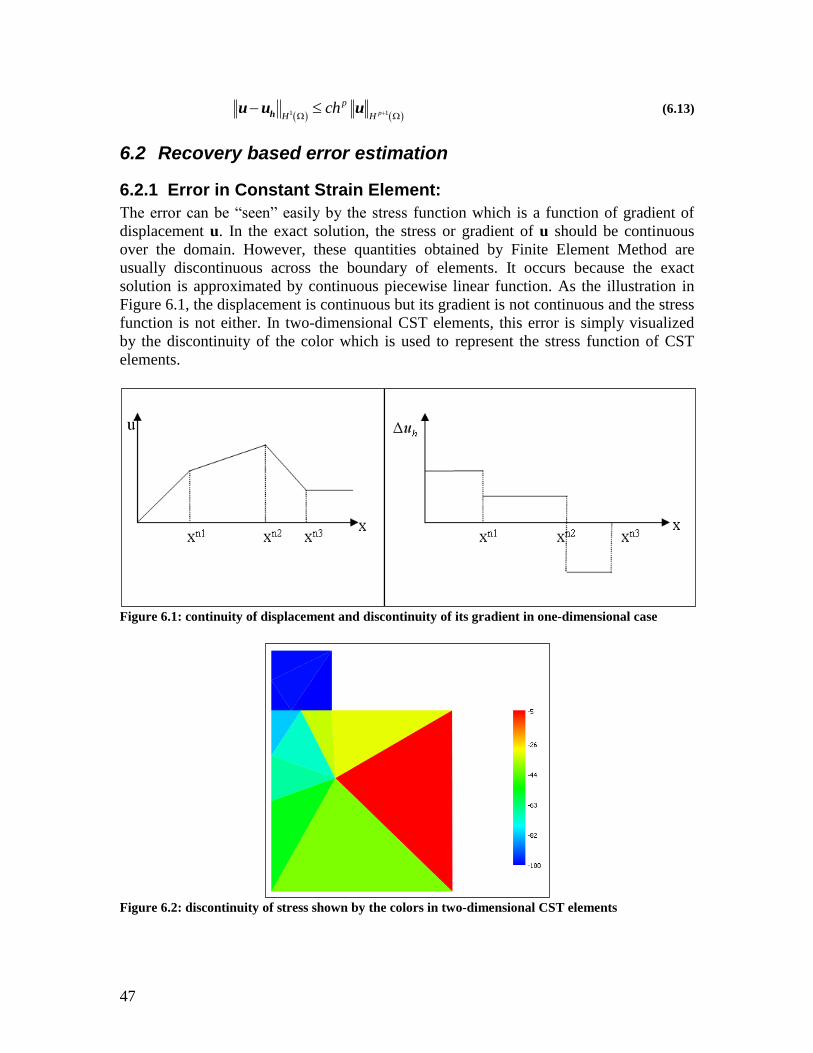
6.2.1 Error in Constant Strain Element:
The error can be “seen” easily by the stress function which is a function of gradient of
displacement u. In the exact solution, the stress or gradient of u should be continuous
over the domain. However, these quantities obtained by Finite Element Method are
usually discontinuous across the boundary of elements. It occurs because the exact
solution is approximated by continuous piecewise linear function. As the illustration in
Figure 6.1, the displacement is continuous but its gradient is not continuous and the stress
function is not either. In two-dimensional CST elements, this error is simply visualized
by the discontinuity of the color which is used to represent the stress function of CST
elements.
Figure 6.1: continuity of displacement and discontinuity of its gradient in one-dimensional case
Figure 6.2: discontinuity of stress shown by the colors in two-dimensional CST elements
48
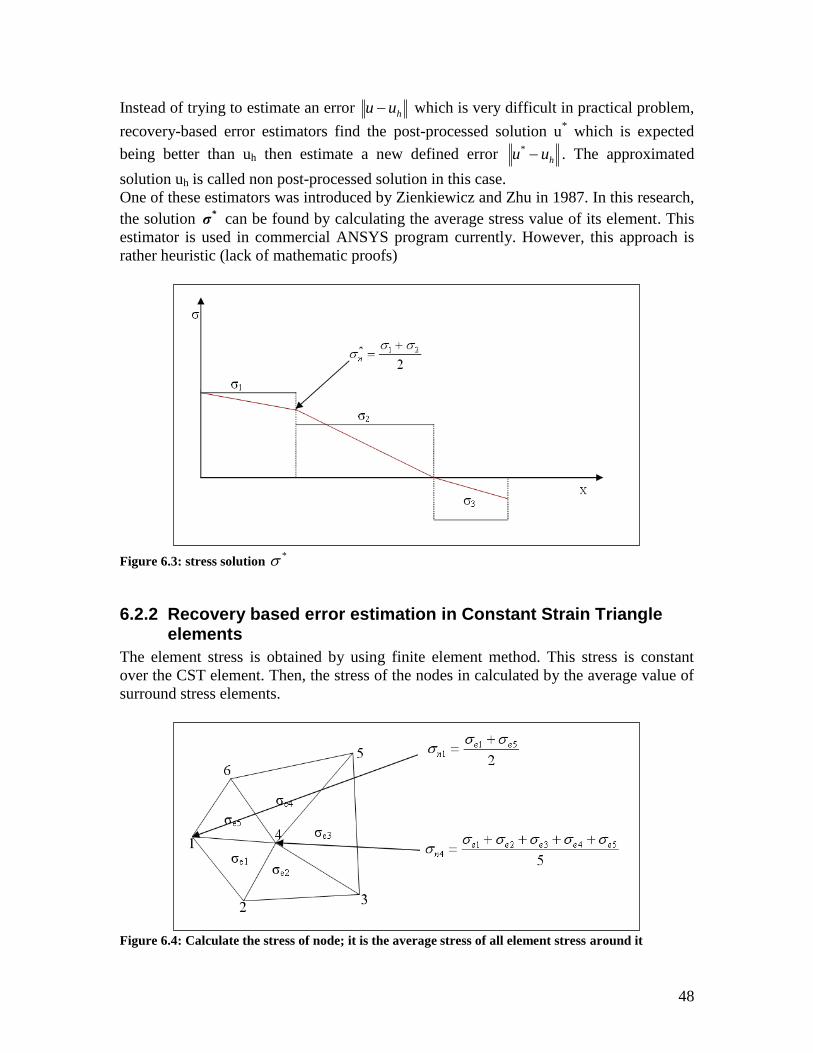
Instead of trying to estimate an error huu which is very difficult in practical problem,
recovery-based error estimators find the post-processed solution u* which is expected
being better than uh then estimate a new defined error huu * . The approximated
solution uh is called non post-processed solution in this case.
One of these estimators was introduced by Zienkiewicz and Zhu in 1987. In this research,
the solution *σ can be found by calculating the average stress value of its element. This
estimator is used in commercial ANSYS program currently. However, this approach is
rather heuristic (lack of mathematic proofs)
Figure 6.3: stress solution
*
6.2.2 Recovery based error estimation in Constant Strain Triangle elements
The element stress is obtained by using finite element method. This stress is constant
over the CST element. Then, the stress of the nodes in calculated by the average value of
surround stress elements.
Figure 6.4: Calculate the stress of node; it is the average stress of all element stress around it

49
Then, the post-processed stresses of the CST elements are determined by the average
value of its node stresses. This step is illustrated as in below figure:
Figure 6.5: Calculate the new value stress of element
Calculate the error of the element by using the energy norm of post-processed solution u*
and non post-processed solution uh:
1
2
,T
E Ee a dV
* * * * -1 *
h h hu u u u u u σ σ C σ σ (6.14)
2
,T
h Ee e a dV
* * * -1 *
h he e σ σ C σ σ (6.15)
With:
,T
a dV
* * * -1 *
h hu u u u σ σ C σ σ (6.16)
And
* *
he σ σ (6.17)
Hence,
2
,T
h Ee e a dV
* * * -1 *
h he e σ σ C σ σ (6.18)
n
ehEh Eee 222 (6.19)
Where
2T
e edV
* -1 *
e e e eσ σ C σ σ (6.20)
Strain energy can be also used
21 1
2 2
T
e ee dV
* -1 *
e e e eσ σ C σ σ (6.21)
Calculate strain energy of all elements in the mesh. Then, the maximum and minimum
strain energy is determined. The critical strain energy is defined base on these values as:
50
minmaxmax eeeecrit (6.22)
: is chosen = 0.75 in this work
The elements which have strain energy larger than this critical value are chosen to be
refined.
6.3 Rivara’s triangular refinement algorithm
Mesh modification used in adaptive technique includes local refinement and coarsening.
In this work, only local refinement is used for h-refinement technique. This chapter
covers a method used to refine the elements which are chosen by using the previous
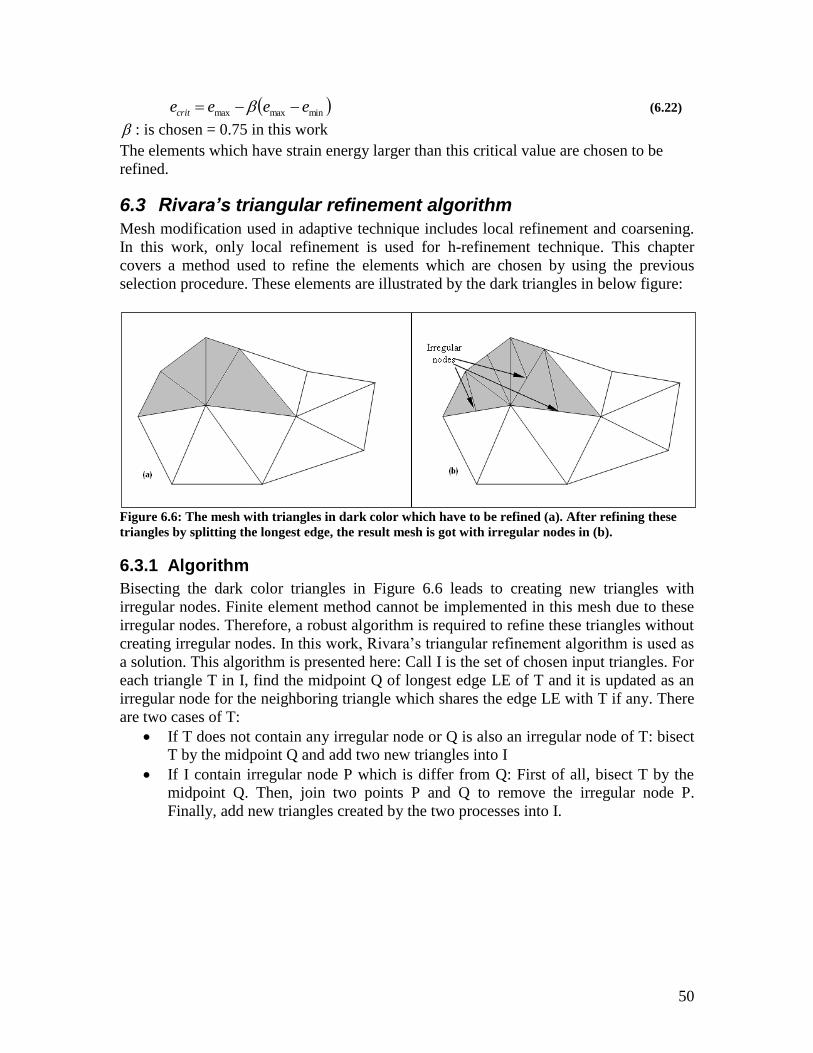
selection procedure. These elements are illustrated by the dark triangles in below figure:
Figure 6.6: The mesh with triangles in dark color which have to be refined (a). After refining these
triangles by splitting the longest edge, the result mesh is got with irregular nodes in (b).
6.3.1 Algorithm
Bisecting the dark color triangles in Figure 6.6 leads to creating new triangles with
irregular nodes. Finite element method cannot be implemented in this mesh due to these
irregular nodes. Therefore, a robust algorithm is required to refine these triangles without
creating irregular nodes. In this work, Rivara’s triangular refinement algorithm is used as
a solution. This algorithm is presented here: Call I is the set of chosen input triangles. For
each triangle T in I, find the midpoint Q of longest edge LE of T and it is updated as an
irregular node for the neighboring triangle which shares the edge LE with T if any. There
are two cases of T:
If T does not contain any irregular node or Q is also an irregular node of T: bisect
T by the midpoint Q and add two new triangles into I
If I contain irregular node P which is differ from Q: First of all, bisect T by the
midpoint Q. Then, join two points P and Q to remove the irregular node P.
Finally, add new triangles created by the two processes into I.
51
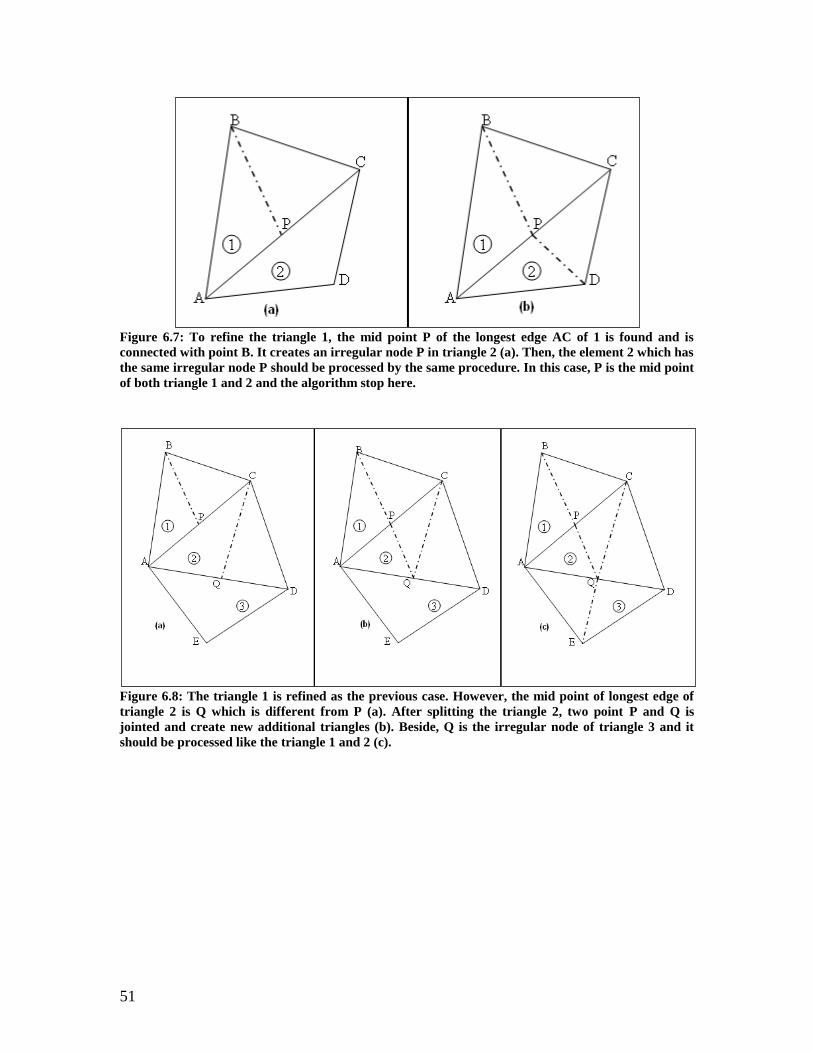
Figure 6.7: To refine the triangle 1, the mid point P of the longest edge AC of 1 is found and is
connected with point B. It creates an irregular node P in triangle 2 (a). Then, the element 2 which has
the same irregular node P should be processed by the same procedure. In this case, P is the mid point
of both triangle 1 and 2 and the algorithm stop here.
Figure 6.8: The triangle 1 is refined as the previous case. However, the mid point of longest edge of
triangle 2 is Q which is different from P (a). After splitting the triangle 2, two point P and Q is
jointed and create new additional triangles (b). Beside, Q is the irregular node of triangle 3 and it
should be processed like the triangle 1 and 2 (c).
52
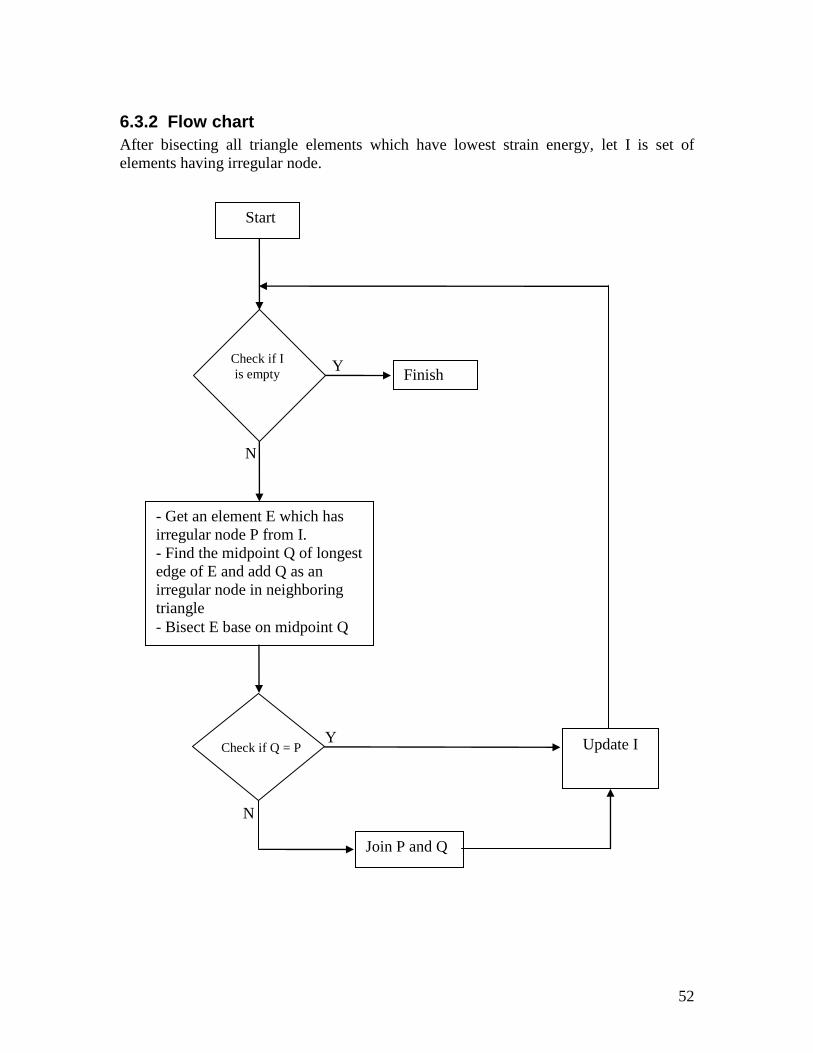
6.3.2 Flow chart
After bisecting all triangle elements which have lowest strain energy, let I is set of
elements having irregular node.
Check if I
is empty Finish Y
Y
N
- Get an element E which has
irregular node P from I.
- Find the midpoint Q of longest
edge of E and add Q as an
irregular node in neighboring
triangle
- Bisect E base on midpoint Q
Join P and Q
N
Start
Check if Q = P Update I

53
7 Numerical Example
7.1 Plate with a hole
Figure 7.1: Geometrical parameters of the model
Young modulus E = 210000
Poisson ratio 3.0
Thichness 1t
Figure 7.2: The mesh result after applying Delaunay triangulation and two-dimensional mesh
generation

54
Figure 7.3: This displacement result after multiplying by 100 times
Figure 7.4: the stress x result of the model before applying adaptive procedure
55
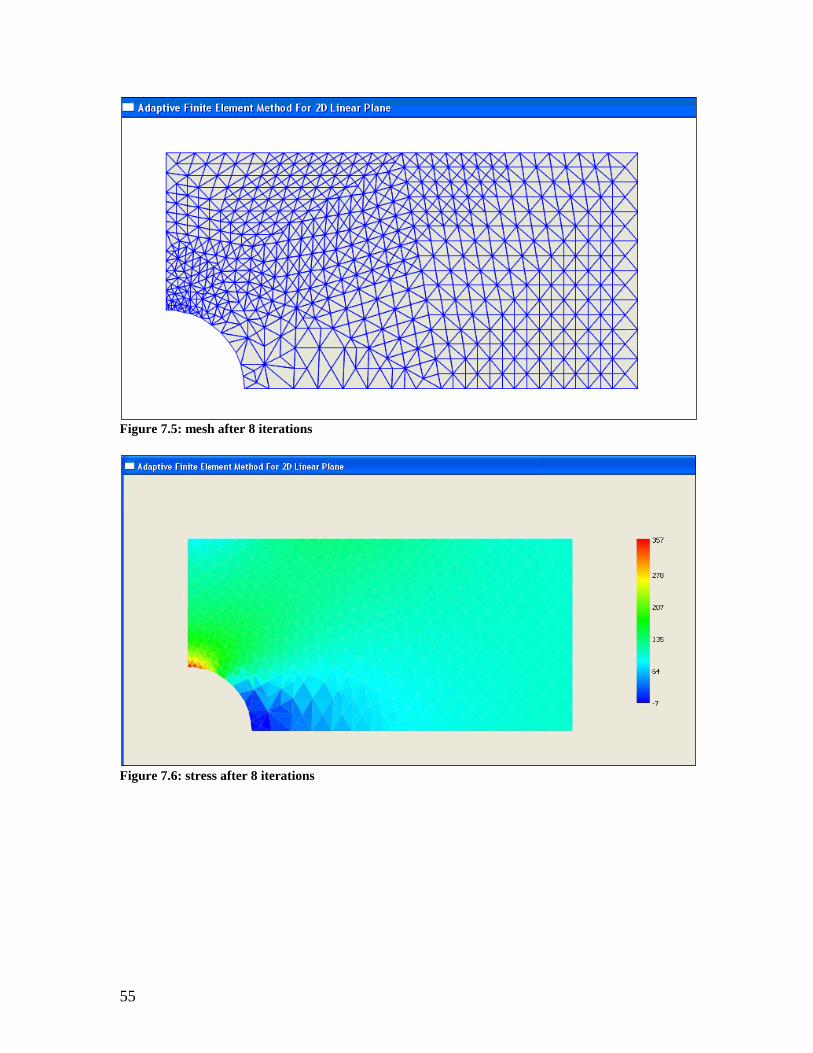
Figure 7.5: mesh after 8 iterations
Figure 7.6: stress after 8 iterations
56
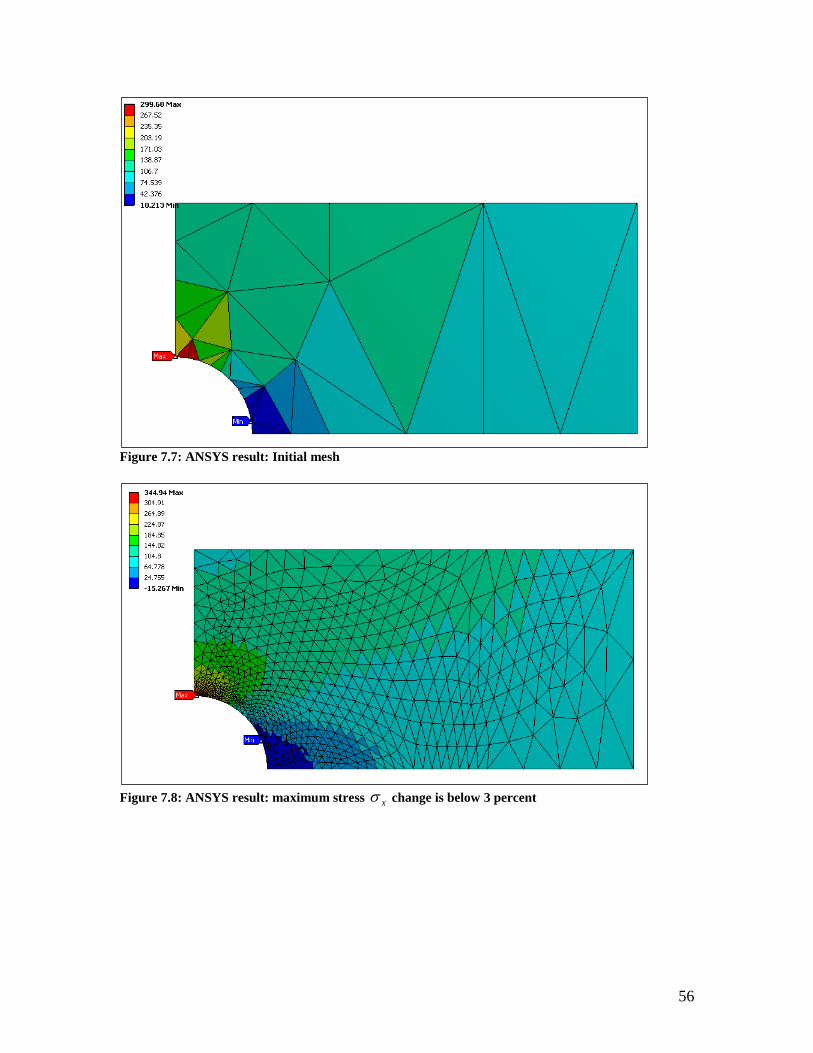
Figure 7.7: ANSYS result: Initial mesh
Figure 7.8: ANSYS result: maximum stress x change is below 3 percent
57
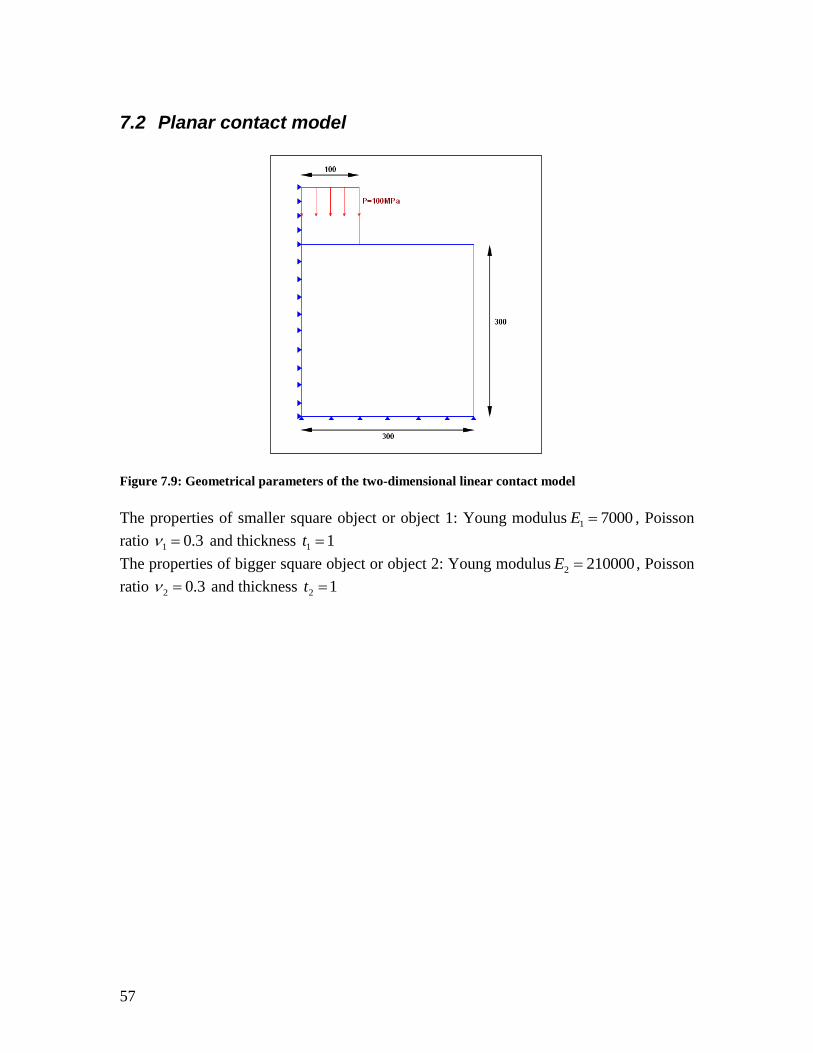
7.2 Planar contact model
Figure 7.9: Geometrical parameters of the two-dimensional linear contact model
The properties of smaller square object or object 1: Young modulus 70001 E , Poisson
ratio 3.01 and thickness 11 t
The properties of bigger square object or object 2: Young modulus 2100002 E , Poisson
ratio 3.02 and thickness 12 t
58
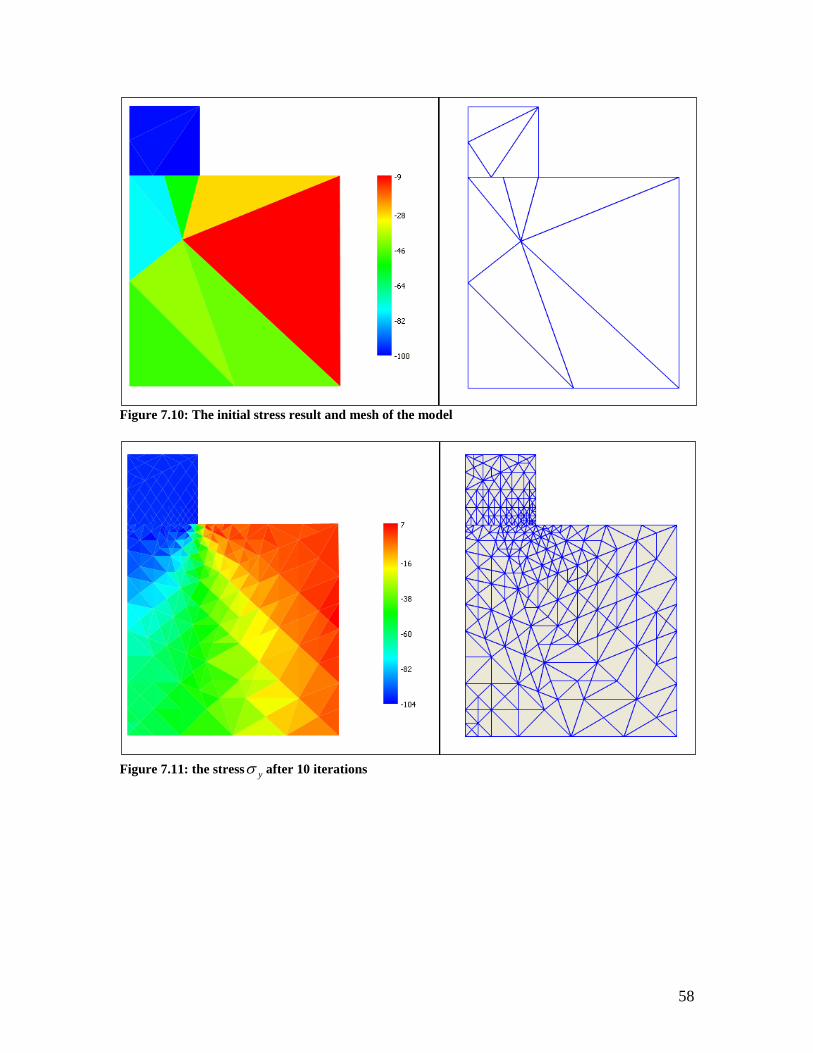
Figure 7.10: The initial stress result and mesh of the model
Figure 7.11: the stress y after 10 iterations
59
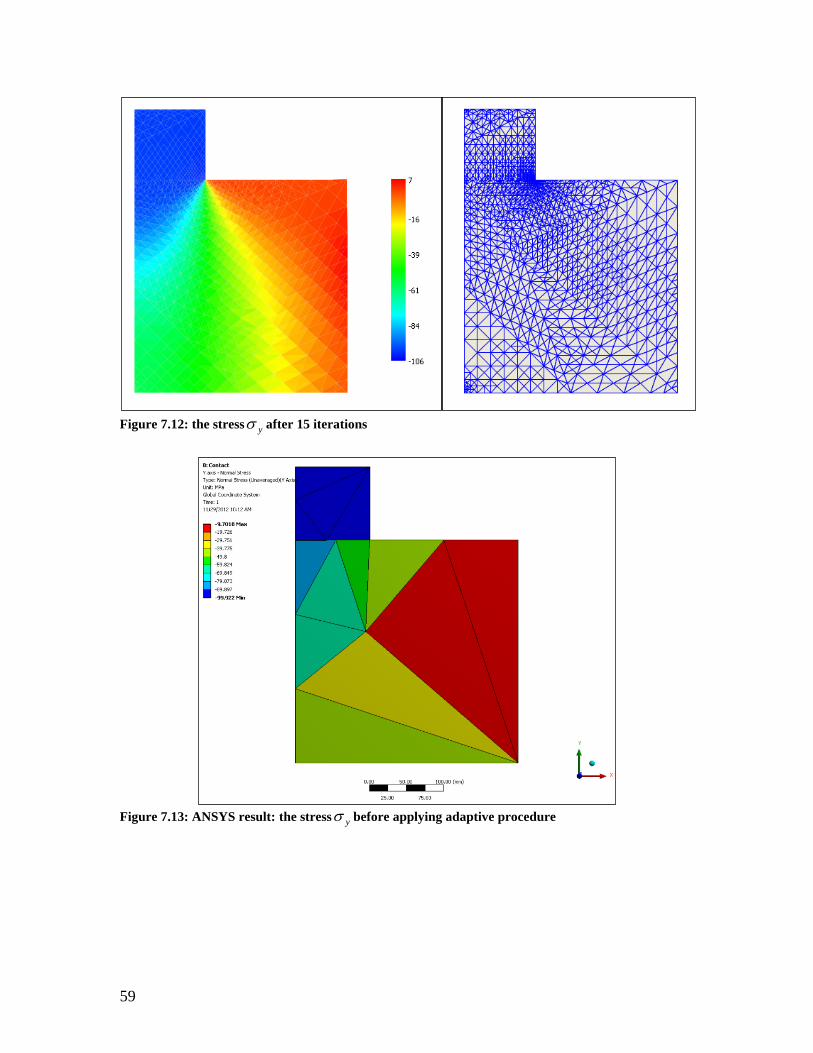
Figure 7.12: the stress y after 15 iterations
Figure 7.13: ANSYS result: the stress y before applying adaptive procedure
60
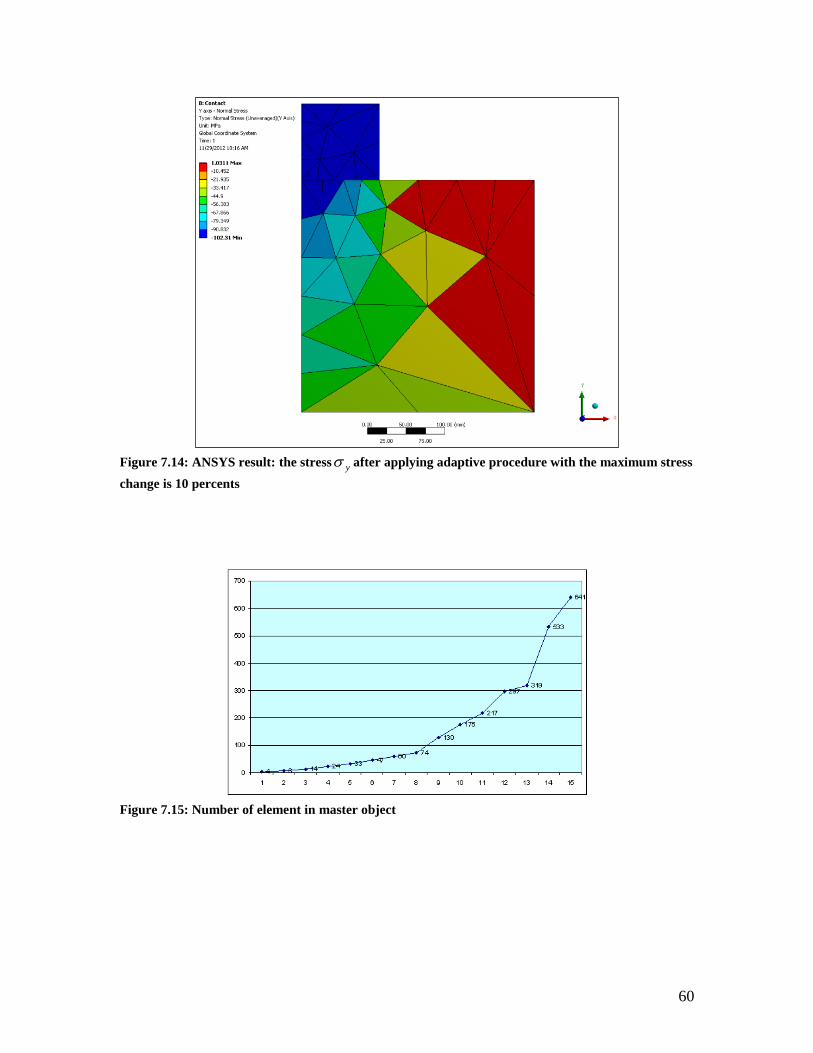
Figure 7.14: ANSYS result: the stress y after applying adaptive procedure with the maximum stress
change is 10 percents
Figure 7.15: Number of element in master object
61
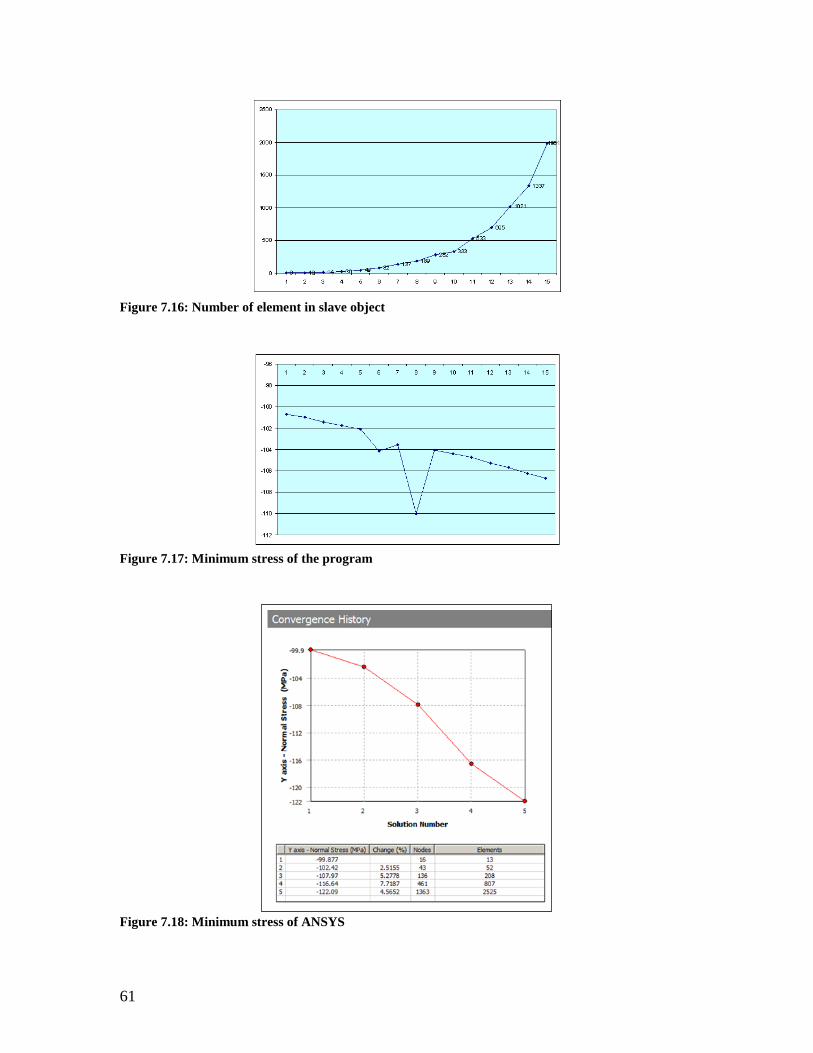
Figure 7.16: Number of element in slave object
Figure 7.17: Minimum stress of the program
Figure 7.18: Minimum stress of ANSYS

62

63
8 Future Work This work only considers the linear problem in which displacement is very small and
contact area does not depend on the displacement. However, in practical contact model,
the displacement is usually very large and contact area is a function of displacement. The
model for non-linear problem without contact has a form:
ir (u)=r (8.1)
Where )(uri is the internal force of model and it depends on displacement u. To solve
about equation, a non-linear solver such as Newton-Raphson method or arc-length
method is required.
The non-linear contact model which is illustrated as sphere contact in figure 8.1 is very
complicated since the contact area depends on displacement and the tangential gap
function consideration is a must. The system of equation which is the result of
implementation of Lagrange multiplier method for non-linear contact has a form:
T Tc c cT T
cc
K (u)+K u,λ C u Δu G u +C u λ=-
Δλ G uC u 0
(8.2)
This system of equation is derived very carefully in [6]. Solving this equation also need a
non-linear solver.
Figure 8.1: An example of symmetric sphere contact model

64

65
References [1] J. Ruppert. A new and simple algorithm for quality 2-dimensional mesh generation. In
Proc. 4th
ACM-SIAM Symp. On Disc. Algorithms, pages 83-92, 1993.
[2] L.P. Chew. Guaranteed-quality triangular meshes. Technical report, Cornell
University, 1989. No. TR89-983.
[3] L.P. Chew. Constrained Delaunay triangulation. Algorithmica, 4:97-108, 1989.
[4] Thomas Gratsch, Klaus-Jurgen Bathe. A posteriori error estimation techniques in
practical finite element analysis. Computers & Structures, 2004.
[5] O.C.Zienkiewicz, B. Boroomand, J.Z. Zhu. Recovery procedure in error estimation
and adaptivity. Part I: Adaptivity in linear problems. Comput. Methods Appl. Mech.
Engrg. 176 (1999) 111-125.
[6] Wriggers, P. (2002). Computational Contact Mechanics. Wiley, Chichester.
[7] Bin Yang, Tod A. Laursen, Xiaonong Meng. Two dimensional mortar contact
methods for large deformation frictional sliding. Int. J. Numer. International journal for
numerical methods in engineering, 2005, 62:1183-1225.
[8] G. Meschke. Finite Element Methods in Linear Structural Mechanics. Lecture notes,
Ruhr University Bochum, Institute for Structural Mechanics, November 2010.
[9] J.Fish and T Belytschko. A first Course in Finite Elements. John Wiley & Sons,
Chichester, 2006.