jet propulsion laboratory california institute of technology mars 2020 project terrain relative...
TRANSCRIPT

Jet Propulsion LaboratoryCalifornia Institute of Technology
Mars 2020 Project
Terrain Relative Navigation for Pinpoint Landing using Cubesats Mars Cubesat Workshop
Swati Mohan, Andrew Johnson,Nikolas Trawny
November 21, 2014
Copyright 2014 California Institute of Technology. Government sponsorship acknowledged. For planning and discussion purposes only. Cleared for unlimited release (CL#14-4997).
Mars 2020 Project
Jet Propulsion LaboratoryCalifornia Institute of Technology
First Pair Tracking
Second Pair Tracking
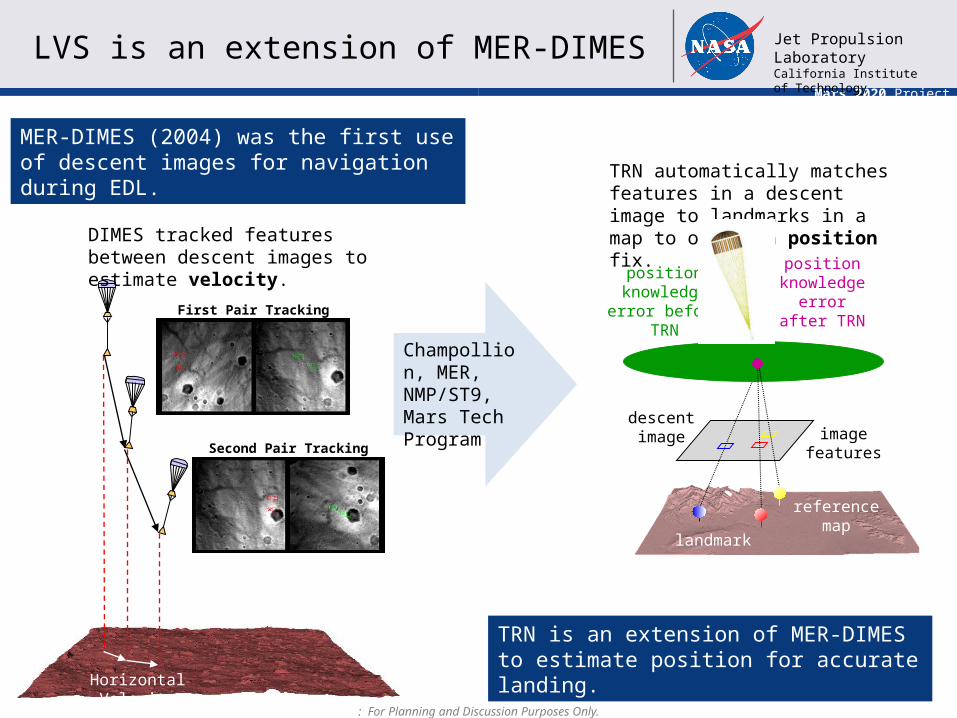
LVS is an extension of MER-DIMES
MER-DIMES (2004) was the first use of descent images for navigation during EDL.
descentimage
referencemap
positionknowledge error
before TRN
positionknowledge error after
TRN
TRN automatically matches features in a descent image to landmarks in a map to obtain a position fix.
landmarks
image features
Champollion, MER, NMP/ST9, Mars Tech Program
DIMES tracked features between descent images to estimate velocity.
TRN is an extension of MER-DIMES to estimate position for accurate landing.
Horizontal Velocity
: For Planning and Discussion Purposes Only.

Mars 2020 Project
Jet Propulsion LaboratoryCalifornia Institute of Technology
outlier
Image 1Image 2
Image 3
IMU
x x
x
x xx
xx x
outlier
Re
sid
ua
ls
Timex xx x xxTRON: coarse matches
x xx xxxThreshold
IMU
IMU
Image 4
TRON:coarsematches
TRON:coarsematches
Image 5
IMU
TRON: finematches
TRON:finematches
VISINAV: Batch Initialization VISINAV: Extended Kalman Filter
coarse matchimage templates
fine matchimage templates
Propagate
Batch update
EKF update
EKF update
LVS TRN Implementation
Propagate Propagate Propagate
IMU
Map
Camera Image 10
Remove Large Position Uncertainty (50m 1-σ) Improve Position Accuracy (20m 1- σ): For Planning and Discussion Purposes Only.
Mars 2020 Project
Jet Propulsion LaboratoryCalifornia Institute of Technology
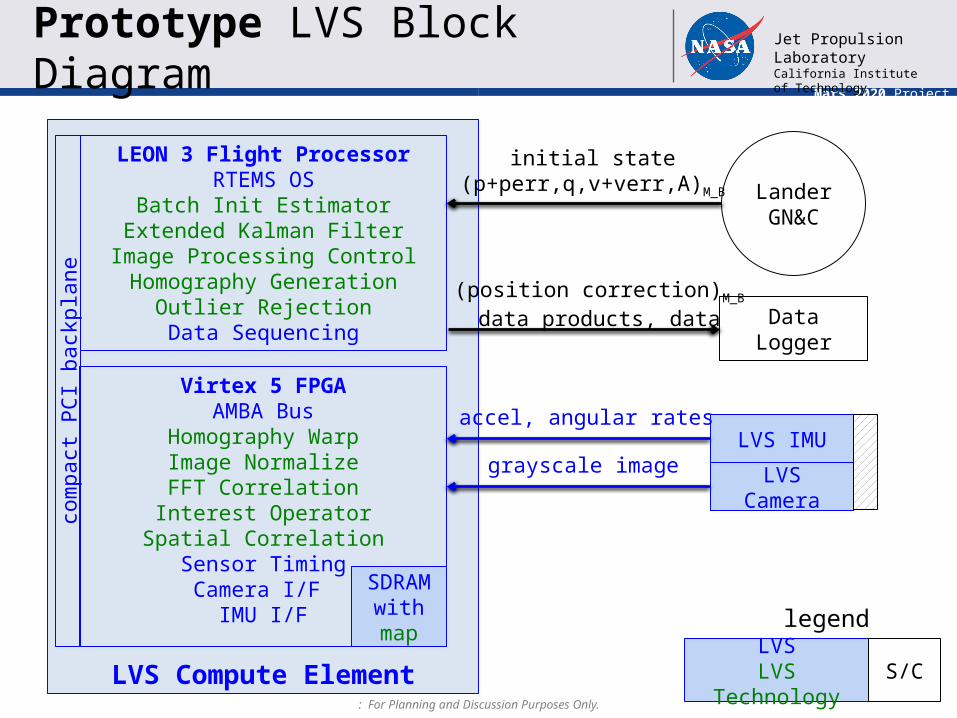
LVS Compute Element
Prototype LVS Block Diagram
LVS IMU
LVS Camera
Lander GN&C
initial state(p+perr,q,v+verr,A)M_B
accel, angular rates
grayscale image
LEON 3 Flight ProcessorRTEMS OS
Batch Init EstimatorExtended Kalman Filter
Image Processing ControlHomography Generation
Outlier RejectionData Sequencing
com
pact
PC
I bac
kpla
ne
Virtex 5 FPGAAMBA Bus
Homography WarpImage NormalizeFFT Correlation
Interest OperatorSpatial Correlation
Sensor TimingCamera I/F
IMU I/F
LVSLVS Technology
S/C
legend
SDRAM with map
Data Logger
(position correction)M_B
data products, data
: For Planning and Discussion Purposes Only.

Mars 2020 Project
Jet Propulsion LaboratoryCalifornia Institute of Technology
• Hardware
Implementation on a Cubesat
: For Planning and Discussion Purposes Only.
Compute Element:- Existing TRN boards are larger
than Cubesat scale- Requires time and money to
scale down to scale to a Cubesat size
- JPL developed IRIS radio includes Cubesat scale Virtex 5 implementation
- Deep space Cubesat processor in development in JPL Sec. 349
IMU:- Current TRN designs
use LN200 or MIMU- Cubesat scale IMUs
exist with similar performance
- Examples are BCT MEMS gyro, KVH FOG gyro
Camera:- Current TRN design use a
1024x1024 array with 90 deg field of view
- Cubesat scale detectors exist with similar performance
- Example: KAI-04022 (2048x2048)
- Optics would need to be designed for each mission
• Software– TRN algorithms have been implemented and field tested– Mission specific development needs to occur:
• Porting to the mission processor• Interfacing with the mission GN&C• Obtaining and implementing maps for mission landing site

Mars 2020 Project
Jet Propulsion LaboratoryCalifornia Institute of Technology
• Technology Advancement– Technology demonstration of pinpoint landing– Technology demonstration of hazard detection
• Science– Precision placement of probes ( seismometers, weather
stations, etc.)– Mapping of Phobos or Deimos
• Landing Site Support– Pre-cursor probes to confirm “worthiness” of potential landing
site targets
And many more…!
Possible Mission Applications
: For Planning and Discussion Purposes Only.