journal of la efficient multi-channel signal...
TRANSCRIPT

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 1
Efficient Multi-Channel Signal Strength basedLocalization via Matrix Completion
and Bayesian Sparse LearningSofia Nikitaki, Grigorios Tsagkatakis, and Panagiotis Tsakalides
Abstract—Fingerprint-based location sensing technologies play an increasingly important role in pervasive computing ap-plications due to their accuracy and minimal hardware requirements. However, typical fingerprint-based schemes implicitlyassume that communication occurs over the same channel (frequency) during the training and the runtime phases. When thisassumption is violated, the mismatches between training and runtime fingerprints can significantly deteriorate the localizationperformance. Additionally, the exhaustive calibration procedure required during training limits the scalability of this class ofmethods. In this work, we propose a novel, scalable, multi-channel fingerprint-based indoor localization system that employsmodern mathematical concepts based on the Sparse Representations and Matrix Completion theories. The contribution of ourwork is threefold. First, we investigate the impact of channel changes on the fingerprint characteristics and the effects of channelmismatch on state-of-the-art localization schemes. Second, we propose a novel fingerprint collection technique that significantlyreduces the calibration time, by formulating the map construction as an instance of the Matrix Completion problem. Third, wepropose the use of sparse Bayesian learning to achieve accurate location estimation. Experimental evaluation on real datahighlights the superior performance of the proposed framework in terms of reconstruction error and localization accuracy.
Index Terms—Indoor localization, matrix completion, sparse Bayesian learning, multi-channel, received signal strength
F
1 INTRODUCTION
Recent technological developments in the sensing ca-pabilities of smart phones have redefined the notionof mobile computing. Pervasive and ubiquitous com-puting requires location and mobility management inorder to provide location dependent context. Poten-tial applications of location aware mobile computinginclude health care monitoring, emergency manage-ment, personal tracking, and context dependent in-formation services [1].
A typical localization scenario involves a set ofBase Stations (BSs) placed at known positions anda Mobile Station (MS) that needs to be located. TheBSs can be network enabled devices such as wirelessmesh routers, wireless Access Points (AP), and sensornodes, while the MS is a mobile device such as asmartphone. The actual localization can be performedeither at a central station or at the mobile device.Certain localization schemes utilize the informationfrom the BSs and require the MS to compute its ownposition, while other schemes utilize information fromthe MS to compute the location of the user remotely atthe Localization Server (LS) [2]. In this work, we focus
• S. Nikitaki is with the NEC Laboratories Europe, Heidelberg, Germany.E-mail: [email protected]
• G. Tsagkatakis is with the Institute of Computer Science - FO.R.T.H.E-mail: [email protected]
• P. Tsakalides is is with the Department of Computer Science, Universityof Crete, Greece and the Institute of Computer Science - FO.R.T.H.,Crete, Greece. E-mail: [email protected]
on the latter case since performing the localization atthe LS offers certain benefits including lower powerconsumption at the mobile device and the abilityto perform computationally demanding high levelreasoning. This is important since, in spite of improve-ments in energy consumption, battery capacity growsslowly and power management is still a challengein mobile computing. Moreover, remote location es-timation facilitates the installation, maintenance, andmanagement of the service.
A critical issue regarding the design of localizationschemes is the type and characteristics of the measure-ments that are going to be used in the task. Due to theavailability of different sensing modalities, numeroussensing platforms have been investigated for obtain-ing localization relevant data. Such modalities includelaser rangefinders, ultrasounds, depth cameras, andWiFi infrastructure signals. Of course, each modalityis associated with a different set of characteristicsincluding cost, data availability, reliability, form factoretc.
Selecting the appropriate data source, given thevarious constraints, is a subject under intense debate.For example in [3], the authors investigated differentsensing modalities for robot localization includinglaser rangefinders, depth cameras, and WiFi ReceivedSignal Strength (RSS). Their analysis on real data indi-cated that although laser rangefinding can achieve thesmallest absolute error, WiFi signal strength achievesthe lowest average localization error.
In this work, we consider WiFi signals due to their

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 2
abundance, reliability and acquisition ease. The keyidea underlying WiFi based localization schemes isthat the power, and therefore the RSS, although it is af-fected by various factors in the propagation medium,is primarily dominated by the distance between thetransmitter and the receiver. However, the layout anddynamics of physical spaces make the localizationproblem extremely demanding since signal powerattenuation is heavily dependent on various phe-nomena including multipath, fading, shadowing, andthe massive presence of objects (e.g., walls, obstacles,moving objects etc.),
Triangulation and scene analysis are the two princi-pal techniques for location sensing. Triangulation ordistance-based methods estimate the position of themobile user by computing its distance from at leastthree reference points [4]–[7]. The RSS measurementsare translated to distance by applying theoretical orempirical path-loss models. However, formulating areliable path-loss model is challenging and can leadto large localization errors [2].
To address this difficulty, scene analysis or finger-printing techniques build training or signature mapsto represent the physical space by capturing the vari-ations of the indoor WiFi signal propagation [8]. Tobuild a training map, an extensive calibration processis mandatory, where RSS fingerprints are collected atvarious locations [9], [10]. Although fingerprint-basedsystems can achieve high performance in terms oflocalization, the time and effort required during thetraining phase remain their major disadvantage.
From a network perspective, IEEE 802.11 is thedominant and most pervasive local wireless network-ing standard, making its extensive deployment andavailability of infrastructure appealing also for posi-tioning purposes. The radio frequency band of IEEE802.11b/g is in 2.4 GHz, and is divided into 13 over-lapping channels spaced 20MHz apart. TraditionalIEEE 802.11 WLAN utilize a fixed-width channel allo-cation strategy where each AP uses a single channelfor communication. Despite its low complexity, thesingle channel approach exhibits significant limita-tions, such as resource under-utilization, since it doesnot consider dynamically changing traffic conditionsand requirements.
As a result, in recent years, WiFi AP designersare keen to establish Dynamic Channel Assignment(DCA) strategies in order to boost network capacityand to avoid wasting RF resources [11]. Dynamicchannel allocation strategies consider the temporarystochastic variations in traffic demand to provideoptimal network coverage [11], [12]. Consequently, theassociated channel per AP changes over time in orderto successfully manage various network parameterssuch as mobility, user population, and demand of ser-vice, while minimizing the interference degradationbetween adjacent APs.
In addition to the IEEE 802.11 standard based com-
munications, novel wireless communications archi-tectures employ spectrum sharing among users andservices to achieve various goals. For example, Cog-nitive Radio technology adapts the network operatingparameters according to the surrounding radio en-vironment resulting in stochastic DCA methods thatcould strongly affect RSS fingerprints [13]. Further-more, multi-channel based localization is importantfor infrastructures which adopt Ulta-Wideband tech-nologies. UWB technology utilizes a large frequencyspectrum which could cause biases in the signal prop-agation estimates and ultimately lead to significantlocalization errors [14].
From a localization point of view, dynamic channelallocation has a direct impact on the RSS measure-ments since power attenuation across channels canvary in orders of dBs, suggesting large deviations be-tween the RSS measurements at the same location buton different channels. Due to the existence of multiplecommunication channels, in a real world scenario itis possible that measurements collected during theruntime phase are compared with training measure-ments obtained from a different channel. Furthermore,for accurate positioning, a recalibration procedure ismandatory every time that environmental changes oc-cur in the area of interest. Moreover training in multi-channel environments will be even more expensiveand time consuming, since the signature map willconsist of representative fingerprints at each possiblespatial position and for every operational frequency.
In this work, we perform an in-depth study ofthe effects that multiple channels have on the RSSdata collection process and we propose a novel multi-channel RSS fingerprint-based localization algorithmthat exploits the signal power attenuation character-istics across space and frequency in order to provideaccurate estimation while reducing the amount oftraining effort.
The rest of this paper is organized as follows:Section 3 presents an overview of related work con-cerning fingerprint-based systems. Section 4 discussesthe motivation of the proposed framework. Section 4.3presents the necessary MC background, while Section5 describes the proposed multi-channel localizationapproach. Experimental results are provided in Sec-tion 6, and the paper is concluded in Section 7.
2 OVERVIEW OF THE PROPOSED SCHEME
Our proposed multi-channel localization scheme con-sists of two phases: the training phase and the runtimephase. We propose a reduced effort training phasewhere random channel sub-sampling is performed inorder to collect RSS measurements on a grid of refer-ence points from a subset of the available channels.The LS takes the partial signature maps and appliesour proposed Matrix Completion (MC)-based recov-ery technique in order to estimate the unobserved
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 3
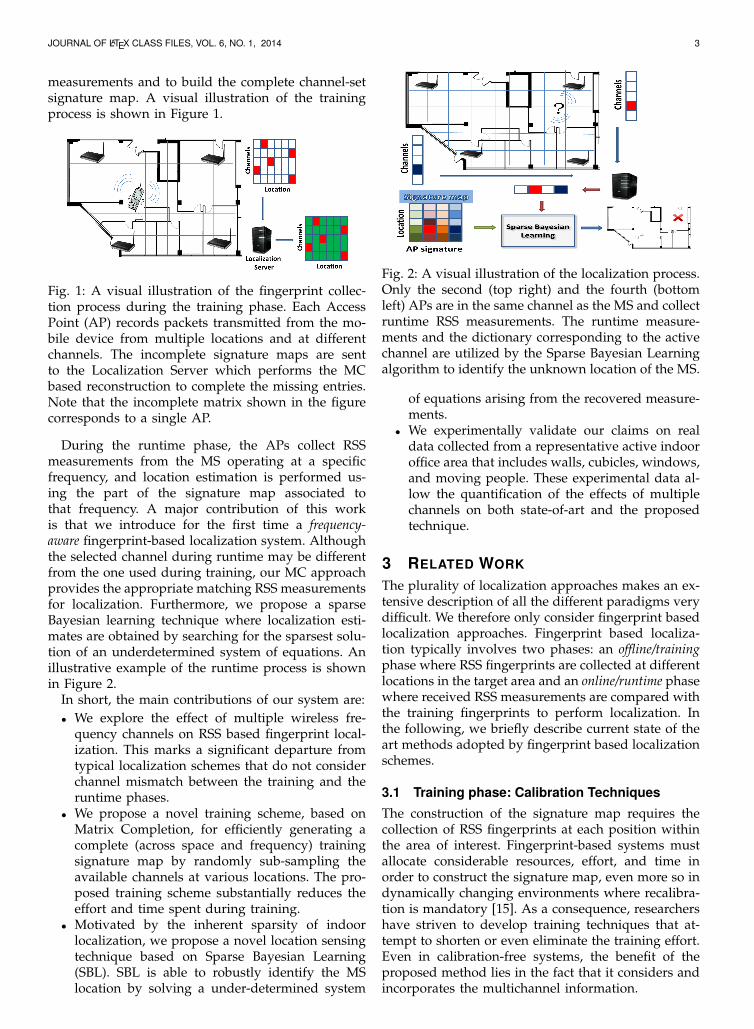
measurements and to build the complete channel-setsignature map. A visual illustration of the trainingprocess is shown in Figure 1.
Fig. 1: A visual illustration of the fingerprint collec-tion process during the training phase. Each AccessPoint (AP) records packets transmitted from the mo-bile device from multiple locations and at differentchannels. The incomplete signature maps are sentto the Localization Server which performs the MCbased reconstruction to complete the missing entries.Note that the incomplete matrix shown in the figurecorresponds to a single AP.
During the runtime phase, the APs collect RSSmeasurements from the MS operating at a specificfrequency, and location estimation is performed us-ing the part of the signature map associated tothat frequency. A major contribution of this workis that we introduce for the first time a frequency-aware fingerprint-based localization system. Althoughthe selected channel during runtime may be differentfrom the one used during training, our MC approachprovides the appropriate matching RSS measurementsfor localization. Furthermore, we propose a sparseBayesian learning technique where localization esti-mates are obtained by searching for the sparsest solu-tion of an underdetermined system of equations. Anillustrative example of the runtime process is shownin Figure 2.
In short, the main contributions of our system are:• We explore the effect of multiple wireless fre-
quency channels on RSS based fingerprint local-ization. This marks a significant departure fromtypical localization schemes that do not considerchannel mismatch between the training and theruntime phases.
• We propose a novel training scheme, based onMatrix Completion, for efficiently generating acomplete (across space and frequency) trainingsignature map by randomly sub-sampling theavailable channels at various locations. The pro-posed training scheme substantially reduces theeffort and time spent during training.
• Motivated by the inherent sparsity of indoorlocalization, we propose a novel location sensingtechnique based on Sparse Bayesian Learning(SBL). SBL is able to robustly identify the MSlocation by solving a under-determined system
Fig. 2: A visual illustration of the localization process.Only the second (top right) and the fourth (bottomleft) APs are in the same channel as the MS and collectruntime RSS measurements. The runtime measure-ments and the dictionary corresponding to the activechannel are utilized by the Sparse Bayesian Learningalgorithm to identify the unknown location of the MS.
of equations arising from the recovered measure-ments.
• We experimentally validate our claims on realdata collected from a representative active indooroffice area that includes walls, cubicles, windows,and moving people. These experimental data al-low the quantification of the effects of multiplechannels on both state-of-art and the proposedtechnique.
3 RELATED WORK
The plurality of localization approaches makes an ex-tensive description of all the different paradigms verydifficult. We therefore only consider fingerprint basedlocalization approaches. Fingerprint based localiza-tion typically involves two phases: an offline/trainingphase where RSS fingerprints are collected at differentlocations in the target area and an online/runtime phasewhere received RSS measurements are compared withthe training fingerprints to perform localization. Inthe following, we briefly describe current state of theart methods adopted by fingerprint based localizationschemes.
3.1 Training phase: Calibration TechniquesThe construction of the signature map requires thecollection of RSS fingerprints at each position withinthe area of interest. Fingerprint-based systems mustallocate considerable resources, effort, and time inorder to construct the signature map, even more so indynamically changing environments where recalibra-tion is mandatory [15]. As a consequence, researchershave striven to develop training techniques that at-tempt to shorten or even eliminate the training effort.Even in calibration-free systems, the benefit of theproposed method lies in the fact that it considers andincorporates the multichannel information.

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 4
With respect to minimizing calibration authors in[16] propose a training procedure where the wholearea is divided into rooms, thereby limiting the possi-ble locations to room-level granularity. Other localiza-tion protocols adopt data interpolation methods likekNN [17] and linear regression [18] to complete thetraining map using fingerprints taken at a small num-ber locations. Recently, a Compressed Sensing-basedtraining technique was proposed [19] that exploits thesparse nature of the RSS readings in the frequencydomain to estimate the radio map from a small num-ber of random measurements. Although this approachmay reduce the number of locations used for training,reconstruction is performed independently for eachAP and consequently the correlation among variousAPs is not taken into account leading to poor results.
To reduce the maintenance effort of the trainingphase, in [20] the signature map is estimated dynam-ically based on the runtime observations. To achievethis goal, neighbouring APs exchange RSS measure-ments during the runtime phase in order to updatethe signature map via a Gaussian Process regressionmodel. Similarly, our proposed system is based onthe measurements received at the APs. However, thecalibration effort is reduced via channel sub-samplingand the inherent correlation structure of the sampledRSS fingerprints is considered for recovering the un-observed measurements.
To balance the performance degradation associ-ated with a shortened calibration phase, the authorsin [21] propose a hybrid generative/discriminativelearning method that requires a small number oflabeled samples and utilizes unlabeled samples torecover additional information for the target regionarea. Compared with the work in [21], our proposedMatrix Completion based training technique reducesthe number of labeled data without requiring unla-beled data.
Recently, a combination of various techniques hasbeen proposed in order to minimize calibration effort.For example, Zee [22] incorporates inertial sensormeasurements crowdsoursed from mobile users andWiFi measurements sensed at predefined grids inorder to combine dead-reckoning and RSS signature-based location sensing. However, the effectiveness ofZee could be hindered by the noisy built-in sensors ofthe mobile device and the number of crowdsourcedmeasurements.
In order to reduce human effort during the trainingphase, one could employ robotic platforms to col-lect training data. However, since the training mea-surements must be associated with specific spatiallocations, robotic platforms must also perform accu-rate Simultaneous Localization And Mapping (SLAM)using additional hardware such as lidar, cameras,ultrasound sensors, and laser scanners [3]. The twomost important issues related to SLAM is the addi-tional cost of the hardware and the location estimation
errors that may render the training data useless. Evenin this case however, collecting training data in amutli-channel environment via a traditional approachrequires full frequency sweeping in order to constructrepresentative signature maps. Such data may beunavailable, due to static network conditions duringtraining, or hard to get (e.g., due to time/power con-straints). As a consequence, the proposed channel sub-sampling approach could be also applied in scenarioswhere robotic platforms perform the training in orderto substantially reduce the power consumption andtime spent during calibration.
3.2 Runtime Phase: Localization techniques
The majority of localization techniques fall unberthree categories with respect to the runtime phase:deterministic, probabilistic, and spatial sparsity-based.
Radar [9] is a deterministic indoor positioning sys-tem which combines signal strength measurementswith specific signal propagation models to provideaccurate location estimates. Position estimation is per-formed by the k-Nearest Neighbour in Signal Spacealgorithm (NNSS) [9], [17]. Another popular localiza-tion scheme is the Compass system [23] which utilizesthe IEEE 802.11 infrastructure and digital compassesunder a probabilistic framework to achieve low costlocalization services.
Horus [24] is a map-based system, which considersdifferent causes for the wireless channel variations.Horus employs a stochastic description of the signa-ture map and performs localization via a maximumlikelihood based approach. Within the probabilisticframework, Bayesian classification has been naturallyadopted to address the localization problem [25], [26].Authors in [27] proposed the mapping of the receivedmeasurements onto principal components (PCs) andadopt a probabilistic approach based on PCs in orderto perform maximum likelihood localization.
Spatial sparsity based approaches exploit the spar-sity of the position for localization, i.e., the fact that aMS can only be in one location at each given time.In [28], we reformulated the localization problemas a sparse approximation problem based on theCompressed Sensing (CS) theory that provides a newparadigm for recovering sparse signals by solving anl1 minimization problem [29], [30]. In a similar vein, in[31] we considered a centralized localization protocolbased on Jointly Compressed Sensing in order toexploit the intra- and inter- signal correlations presentin the RSS measurements.
The authors in [19] also applied the theory of CS,this time in order to minimize the number of the APsneeded for accurate position estimation. In anotherrecent work, indoor localization was also approachedvia the CS framework [32]. The localization algorithmpresented in [32] is based on the measurements trans-mitted from the APs, while it requires the MS to
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 5
interact with a central unit that estimates its position.Under this scenario, CS theory is utilized in orderto minimize the number of measurements exchangedwith the central unit.
From a different perspective, authors in [33] mini-mize the localization error by utilizing high dimen-sional fingerprints collected using a diverse set ofparameters controlling the operational frequency andthe transmission power at each possible location.Although their approach optimizes the accuracy ofalready existing techniques, an exhaustive trainingphase is required. Compared to that work, our pro-posed multi-channel localization system adopts a re-duced effort calibration phase while performing accu-rate location estimation.
4 SIGNATURE MAPS PROPERTIES
In this Section, we present illustrative examples thathighlight two major issues that affect multi-channelfingerprint based positioning. First, we discuss theeffect of channel (frequency) changes on the RSSmeasured values and the implication of this phe-nomenon on localization systems. Second, we de-scribe the spatio-frequency correlations of the RSSmeasurements and we provide motivation for utiliz-ing these correlations to reduce the time and effort ofthe training procedure. Based on that, we introducethe Matrix Completion framework as a formal prin-cipal method for the recovery of low rank signaturemaps.
4.1 Multichannel RSS modelWe consider a typical WLAN positioning scenariowhere a set of APs are connected and a user carriesa MS equipped with a wireless network card. An APthat listens to a specific channel, collects the packetstransmitted from the MS at that channel, and recordsthe corresponding RSS values in order to produce asignature map. During the location estimation phase,runtime RSS measurements transmitted from the MSare collected and compared with the fingerprints ob-tained during the training phase.
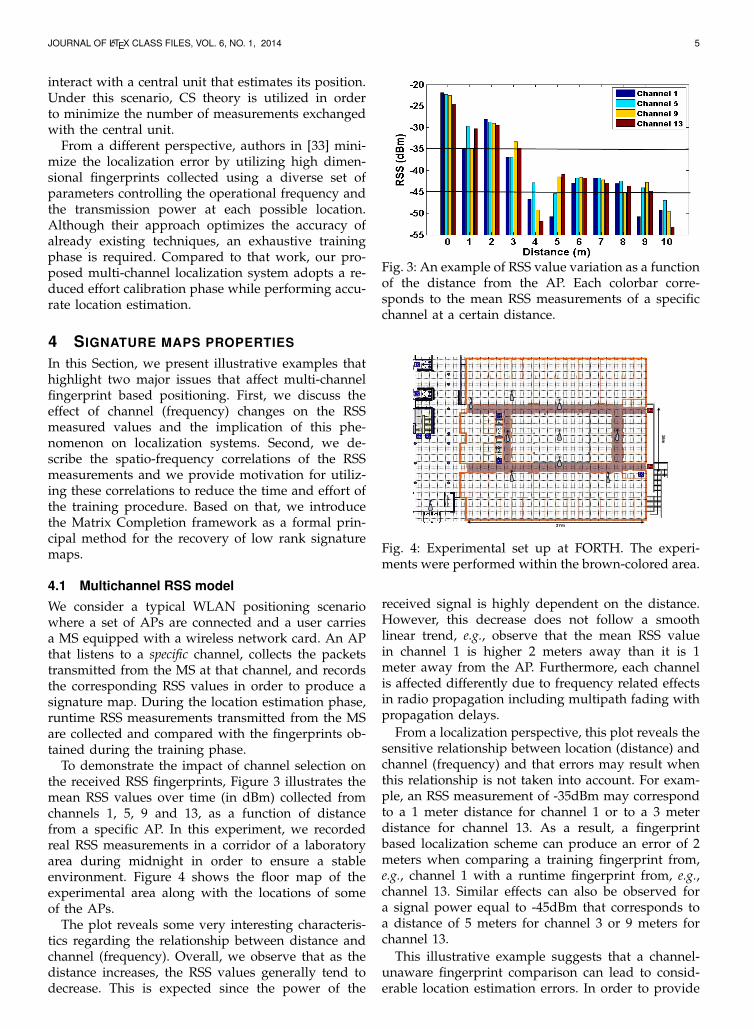
To demonstrate the impact of channel selection onthe received RSS fingerprints, Figure 3 illustrates themean RSS values over time (in dBm) collected fromchannels 1, 5, 9 and 13, as a function of distancefrom a specific AP. In this experiment, we recordedreal RSS measurements in a corridor of a laboratoryarea during midnight in order to ensure a stableenvironment. Figure 4 shows the floor map of theexperimental area along with the locations of someof the APs.
The plot reveals some very interesting characteris-tics regarding the relationship between distance andchannel (frequency). Overall, we observe that as thedistance increases, the RSS values generally tend todecrease. This is expected since the power of the
Fig. 3: An example of RSS value variation as a functionof the distance from the AP. Each colorbar corre-sponds to the mean RSS measurements of a specificchannel at a certain distance.
37m
16
m
Fig. 4: Experimental set up at FORTH. The experi-ments were performed within the brown-colored area.
received signal is highly dependent on the distance.However, this decrease does not follow a smoothlinear trend, e.g., observe that the mean RSS valuein channel 1 is higher 2 meters away than it is 1meter away from the AP. Furthermore, each channelis affected differently due to frequency related effectsin radio propagation including multipath fading withpropagation delays.
From a localization perspective, this plot reveals thesensitive relationship between location (distance) andchannel (frequency) and that errors may result whenthis relationship is not taken into account. For exam-ple, an RSS measurement of -35dBm may correspondto a 1 meter distance for channel 1 or to a 3 meterdistance for channel 13. As a result, a fingerprintbased localization scheme can produce an error of 2meters when comparing a training fingerprint from,e.g., channel 1 with a runtime fingerprint from, e.g.,channel 13. Similar effects can also be observed fora signal power equal to -45dBm that corresponds toa distance of 5 meters for channel 3 or 9 meters forchannel 13.
This illustrative example suggests that a channel-unaware fingerprint comparison can lead to consid-erable location estimation errors. In order to provide
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 6
accurate positioning, it is thus necessary to take intoconsideration the dynamic channel assignment duringthe training and the runtime phases and to account forthe different channels and the corresponding changesin RSS characteristics.
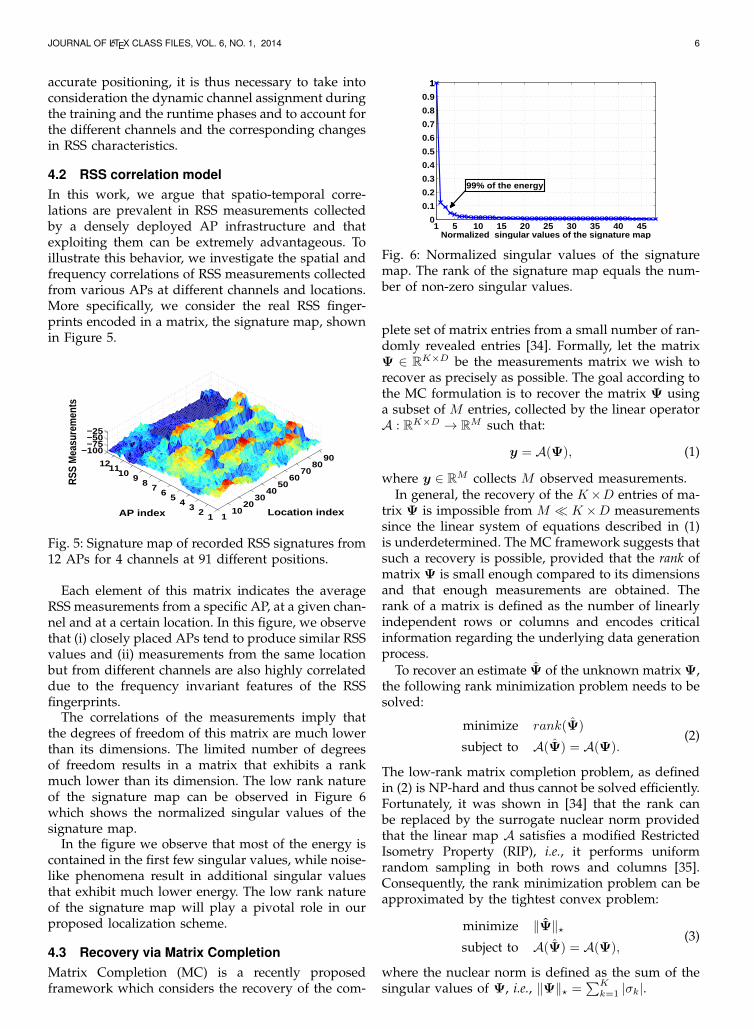
4.2 RSS correlation modelIn this work, we argue that spatio-temporal corre-lations are prevalent in RSS measurements collectedby a densely deployed AP infrastructure and thatexploiting them can be extremely advantageous. Toillustrate this behavior, we investigate the spatial andfrequency correlations of RSS measurements collectedfrom various APs at different channels and locations.More specifically, we consider the real RSS finger-prints encoded in a matrix, the signature map, shownin Figure 5.
110
2030
4050
6070
8090
123456
789101112
−100−75−50−25
Location indexAP index
RSS
Mea
sure
men
ts
Fig. 5: Signature map of recorded RSS signatures from12 APs for 4 channels at 91 different positions.
Each element of this matrix indicates the averageRSS measurements from a specific AP, at a given chan-nel and at a certain location. In this figure, we observethat (i) closely placed APs tend to produce similar RSSvalues and (ii) measurements from the same locationbut from different channels are also highly correlateddue to the frequency invariant features of the RSSfingerprints.
The correlations of the measurements imply thatthe degrees of freedom of this matrix are much lowerthan its dimensions. The limited number of degreesof freedom results in a matrix that exhibits a rankmuch lower than its dimension. The low rank natureof the signature map can be observed in Figure 6which shows the normalized singular values of thesignature map.
In the figure we observe that most of the energy iscontained in the first few singular values, while noise-like phenomena result in additional singular valuesthat exhibit much lower energy. The low rank natureof the signature map will play a pivotal role in ourproposed localization scheme.
4.3 Recovery via Matrix CompletionMatrix Completion (MC) is a recently proposedframework which considers the recovery of the com-
1 5 10 15 20 25 30 35 40 450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
11
Normalized singular values of the signature map
99% of the energy
Fig. 6: Normalized singular values of the signaturemap. The rank of the signature map equals the num-ber of non-zero singular values.
plete set of matrix entries from a small number of ran-domly revealed entries [34]. Formally, let the matrixΨ ∈ RK×D be the measurements matrix we wish torecover as precisely as possible. The goal according tothe MC formulation is to recover the matrix Ψ usinga subset of M entries, collected by the linear operatorA : RK×D → RM such that:
y = A(Ψ), (1)
where y ∈ RM collects M observed measurements.In general, the recovery of the K×D entries of ma-
trix Ψ is impossible from M K ×D measurementssince the linear system of equations described in (1)is underdetermined. The MC framework suggests thatsuch a recovery is possible, provided that the rank ofmatrix Ψ is small enough compared to its dimensionsand that enough measurements are obtained. Therank of a matrix is defined as the number of linearlyindependent rows or columns and encodes criticalinformation regarding the underlying data generationprocess.
To recover an estimate Ψ of the unknown matrix Ψ,the following rank minimization problem needs to besolved:
minimize rank(Ψ)
subject to A(Ψ) = A(Ψ).(2)
The low-rank matrix completion problem, as definedin (2) is NP-hard and thus cannot be solved efficiently.Fortunately, it was shown in [34] that the rank canbe replaced by the surrogate nuclear norm providedthat the linear map A satisfies a modified RestrictedIsometry Property (RIP), i.e., it performs uniformrandom sampling in both rows and columns [35].Consequently, the rank minimization problem can beapproximated by the tightest convex problem:
minimize ‖Ψ‖?subject to A(Ψ) = A(Ψ),
(3)
where the nuclear norm is defined as the sum of thesingular values of Ψ, i.e., ‖Ψ‖? =
∑Kk=1 |σk|.

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 7
It has been shown in [34] that the nuclear-normminimization problem can recover the unknown low-rank matrix from M ≥ cD6/5r log(D) random mea-surements, where D > K and rank(Ψ) = r.
The problem in (3) can be reformulated as asemidefinite programming problem, in which case itcan be solved by off-the-shelf solvers (e.g., CVX [36]).A limitation of this approach is that typically thesealgorithms converge slowly, especially when dealingwith large matrices. Recently, efficient algorithms thattake the characteristics of this specific optimizationinto account, have been proposed [37], [38]. SingularValue Thresholding (SVT) [38] is an iterative algo-rithm where during each iteration, a singular valuedecomposition step is applied first, followed by aprojection onto the known elements. SVT relies onthe fact that the unknown matrix is low-rank at eachiteration and the auxiliary matrices that hold theobserved measurements are sparse.
5 MULTI-CHANNEL BASED LOCALIZATION
In this Section, we describe our proposed multi-channel fingerprint based WLAN localization method.We consider a grid partition of the physical spaceinto fixed structured cells. The proposed system ischaracterized by two phases; the training phase andthe runtime phase.
5.1 Training phaseUnder the traditional fingerprint-based localizationparadigm, during the training phase, RSS measure-ments have to be collected from the MS at each possi-ble reference point, termed cell, and at each individualchannel. In addition to the time and effort requiredin order to collect such a set of RSS measurements,physical constraints could make such a process unfea-sible, since APs may not change channel during thecollection of the training data. In order to minimizethe duration of the calibration phase and overcomethe limitations of traditional training, we propose toperform random sampling of the RF environment,where the APs collect RSS measurements from arandomly selected channel at each cell.
More specifically, during the calibration procedureof the training phase, each AP receives RSS measure-ments from a MS that moves to the cells that definethe area of interest. These measurements are stored atthe local signature map of each AP. The local signaturemap Ψj ∈ RC×D for the j-th AP is defined as
Ψj =
P1,1 P1,2 · · · P1,D
P2,1 P2,2 · · · P2,D
......
. . ....
PC,1 PC,2 · · · PC,D
C×D
, (4)
where Pc,i corresponds to the time averaged RSSmeasurements received from channel c at location i. C
represents the total number of channels and D is thenumber of cells in the area of interest. Hence, the c-throw of Ψj is the vector of RSS measurements that thej-th AP receives at frequency c from all D referencepoints.
The LS receives Ψj from each APj ∈ 1, ..., J,in order to create the signature map Ψ =[Ψ1; . . . ; ΨJ ]C·J×D. The process of channel sub-sampling results in an incomplete signature map. Theobserved training signature map contains a subsetΩ ⊆ [CJ ]×[D] of Ψ’s entries, where |Ω| = C′
C (CJ×D).Furthermore, the specific sampling pattern is definedby the sampling operator A:
[AΩ(M)] =
Pc,i, (c, i) ∈ Ω
0, otherwise. (5)
The LS collects the incomplete matrix Ψ (cf. Fig. 1 -Training phase) that satisfies the low-rank propertyrequired by the MC theory. Effective location sensingrequires the recovery of the complete signature map Ψthat will be used during the runtime phase. Recoveryof the unobserved RSS measurements can be achievedby solving the following optimization problem
min‖Ψ‖? : ‖AΩ(Ψ)−AΩ(M)‖2F < ε, (6)
where Ψ is the recovered signature map, ε is thenoise level, and ‖·‖F denotes the Frobenius norm. Theoptimization problem in (6) can be solved using themethods presented in Section 4.3. The computationalcomplexity of the MC approach is O(|Ω|), as thedominant cost on recovering the signature map isproportional to the number of visiting cells and thenumber of sensed channels during calibration (i.e. thenumber of linear constraints imposed in (6)).
5.2 Runtime phase
The new multi-channel localization scheme that weintroduce in this work, considers the impact of fre-quency on the RSS propagation and utilizes this in-formation during the estimation of the mobile user’slocation. A critical insight regarding the position of aMS is that the associated location vector is inherentlysparse when considering a discretized physical space[28].
Particularly, we consider the sparse vector b ∈ RD
where a non-zero component at the i-th position in-dicates the presence of the MS at cell gi. For instance,the vector
b = [0, 1, 0, . . . , 0]T , (7)
indicates that the MS is located at the second cell.During the runtime phase, the MS broadcasts on
all available channels and each AP, associated to aspecific channel k, collects runtime RSS measurementsfrom the MS at that channel. The localization process

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 8
is performed at the LS where the runtime measure-ments yj from each AP are collected into the runtimefingerprint
y = [y(c1)1 , y
(c2)2 , . . . , y
(cJ )J ]TJ×1 (8)
where J is the number of APs and y(cj)j =
1N
∑Nt=1 P
(cj)j (t) is the average value of RSS runtime
measurements over time from APj at channel cj . Thechannel information is acquired from the packet’schannel information element transmitted from themobile device.
Contrary to currently employed localization meth-ods, the proposed multi-channel localization schemeconsiders the channel information of the runtimemeasurements. Formally, the concept of AP channelselection can be expressed in the following form:
y(cj)j =
φj︷ ︸︸ ︷[0 1 . . . 0]
1×C
·
Ψj︷ ︸︸ ︷P1,1 P1,2 · · · P1,D
P2,1 P2,2 · · · P2,D
......
. . ....
PC,1 PC,2 · · · PC,D
C×D
·
b︷ ︸︸ ︷b1b2...bD
D×1
.
(9)The unit vector φj has all elements equal to zeroexcept φ(cj) = 1, cj being the index of the channelwhere APj received runtime measurements.
Exploiting the sparsity in the spatial domain, effi-cient location sensing translates to the accurate detec-tion of the non-zero coefficient of the sparse vector b.The signal ensemble can be expressed as:
y = ΦΨbΘ=ΦΨ
= Θb+ ε, (10)
where Φ = [φ1, . . . ,φJ ], Θ is a submatrix of Ψthat collects training fingerprints from the APs ofthe runtime frequency, and ε is the noise vector.The matrix Θ is a structured low-rank dictionaryas it obeys the property rank(Θ) = rank(ΦΨ) ≤min(rank(Φ), rank(Ψ)), where Φ is a full-rank matrixand Ψ is low-rank (cf. Section 4).
Exploiting the low-rank and sparsity properties ofthe model in (10), we employ at the LS a sparseBayesian learning with relevance vector machine(RVM) approach to localize the mobile user. TheBayesian framework associated with RVM, given adictionary-dependent sparsity penalty, presents in-variance properties leading to accurate sparse signalestimation, especially for structured dictionaries [39],[40]. Given the runtime measurements y and a priorbelief that b is sparse in basis Ψ, the main objective isto formulate a posterior probability distribution forb. The adopted probabilistic framework introducesa prior over the sparse vector regularized by a setof hyperparameters αi associated with each positionin the area of interest that mitigate the prior. Thehyperparameters individually control the strength ofthe prior over its associated weight.
Sparse Bayesian learning defines a zero-mean Gaus-sian prior with precision ai (inverse-variance) on eachelement of the sparse vector b:
p(b|α) =
D∏i=1
N (bi|0, a−1i ). (11)
The measurement vector y is modeled using a Gaus-sian distribution with variance σ2
0 ,
p(y|b, a0) = (2πσ20)−
J2 exp
(−‖y −Θb‖2
2σ20
). (12)
By employing Bayes’ rule and the Gaussian likeli-hood model, the posterior probability for the sparsevector b is defined as:
p(b|y,a, a0) =p(y|b, a0)p(b|a)
p(y|a, a0)
= (2π)−D2 |Σ|− 1
2 exp(−1
2(b− µ)TΣ−1(b− µ)
), (13)
where | · | denotes the determinant of a matrix. Theposterior mean µ and the covariance matrix Σ aregiven by:
Σ = (A+ a0ΘΘT )−1 , µ = a0ΣΘT b (14)
and A = diag(a1, . . . , aD). The vector a defines thehyperparameters over each component of the esti-mated sparse vector given the prior [41]. The diagonalelements of the covariance matrix provide confidenceintervals (i.e., error bars) on the accuracy of the es-timated components of the sparse vector b. Conse-quently, estimating the sparse vector b translates inestimating the unknown variables a, µ and Σ.
The hyperparameters are estimated by marginaliz-ing them over the sparse vector b. This is an iterativeprocess where each iteration estimates a and a0 thatmaximize the marginal likelihood
L(a, a0) = log p(y|a, a0)
= −1
2[J log 2π + log |C|+ yTC−1y], (15)
with C = σ20I + ΘA−1ΘT . After a number of itera-
tions, a small fraction of ai remains relatively small in-dicating the non-zero components of the sparse vectorb. Consequently, the estimated location of the mobileuser is the cell g that corresponds to the maximumcomponent of b (i.e., to the smallest ai)
g = arg max b = arg max p(y|b,a, a0). (16)
The runtime localization algorithm via sparseBayesian learning is summarized in Algorithm (1).
6 EXPERIMENTAL RESULTS
In this Section, we test and evaluate the proposedmulti-channel fingerprint based localization techniquein an indoor WLAN environment. Real RSS data werecollected in the corridors of the Institute of ComputerScience (ICS) of the Foundation for Research and
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 9
Algorithm 1 Localization via SBLInput: runtime measurements y.Output: estimated location g
1) Determine prior distribution per each cell (eq.11).
2) Estimate the posterior probability of the sparsevector b from Bayes’ rule (eq. 13).
a) Estimate the hyperparameters via maximiz-ing (eq. 15).
3) Estimate the location via (eq. 16).
Technology Hellas (FORTH), an area of approximately37m× 16m. For this area, a grid-based structure wasconsidered with a cell of size 1.2m× 1.2m (cf. Fig. 4).The experiment involved a total of 12 IEEE 802.11b/gAPs (J = 12), 10 of which were placed on the samefloor and 2 were located on a different floor.
The AP operating system, Cisco IOS, is equippedwith a special command that sets the device in scan-ner/monitor mode. When the AP is in monitor mode,it receives packets that contain the RSS information.In a real environment where the MS may not transmitenough packets per time unit, we trigger the devicewith the assistance of the infrastructure (i.e., we issuea ping command) to produce packet transmissionsmore frequently. Each AP uses the unique MAC ad-dress of the mobile device as a distinctive feature torecognize the packets of the transmitter that wants tobe located.
During the training phase, the signature map wasconstructed as follows. RSS observations were col-lected for a period of 20 seconds for each of 4 channels(C = 4) of IEEE 802.11 b/g (channels 1, 5, 9 and 13)over 92 cells (D = 92). The four partially overlappingchannels where chosen in order to achieve higherspectrum utilization with minimum interference. Theamount of calibration effort can be defined as:
Time = Ts×C × J ×D+ Tcs×C ×D+ Tw ×D, (17)
where Ts = 20s is the sensing period, Tcs = 140ms isthe time required for an AP to change communicationchannel, and Tw = 0.8s defines the average time fora mobile user to change cell. Thus, in our setting,complete channel sensing requires 24.5h.
The systems are evaluated by their ability to iden-tify the correct location, out of 46 distinct cells. Theruntime dataset was collected on a typical weekdayafternoon. We note here that the number of cells andonline observations is comparable to those reportedin [19] and [27].
The objectives of the experiments are twofold. First,we are interested in exploring and quantifying theeffects that multiple channels have on the localizationperformance. This is a critical test, since localizationalgorithms typically assume a single communicationchannel. Second, we are aiming at identifying the ben-
0 1 2 3 4 5 60.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Radar
Location Error (m)
CD
F
25% of APs perfom DCA
50% of APs perfom DCA
75% of APs perfom DCA
100% of APs perfom DCA
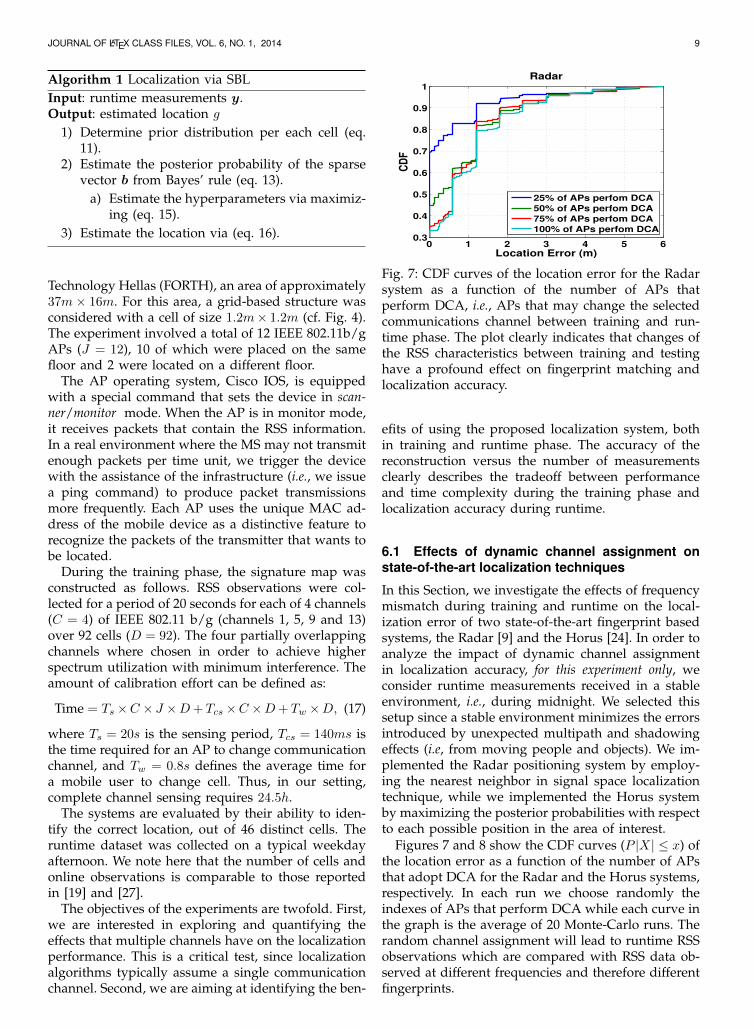
Fig. 7: CDF curves of the location error for the Radarsystem as a function of the number of APs thatperform DCA, i.e., APs that may change the selectedcommunications channel between training and run-time phase. The plot clearly indicates that changes ofthe RSS characteristics between training and testinghave a profound effect on fingerprint matching andlocalization accuracy.
efits of using the proposed localization system, bothin training and runtime phase. The accuracy of thereconstruction versus the number of measurementsclearly describes the tradeoff between performanceand time complexity during the training phase andlocalization accuracy during runtime.
6.1 Effects of dynamic channel assignment onstate-of-the-art localization techniques
In this Section, we investigate the effects of frequencymismatch during training and runtime on the local-ization error of two state-of-the-art fingerprint basedsystems, the Radar [9] and the Horus [24]. In order toanalyze the impact of dynamic channel assignmentin localization accuracy, for this experiment only, weconsider runtime measurements received in a stableenvironment, i.e., during midnight. We selected thissetup since a stable environment minimizes the errorsintroduced by unexpected multipath and shadowingeffects (i.e, from moving people and objects). We im-plemented the Radar positioning system by employ-ing the nearest neighbor in signal space localizationtechnique, while we implemented the Horus systemby maximizing the posterior probabilities with respectto each possible position in the area of interest.
Figures 7 and 8 show the CDF curves (P |X| ≤ x) ofthe location error as a function of the number of APsthat adopt DCA for the Radar and the Horus systems,respectively. In each run we choose randomly theindexes of APs that perform DCA while each curve inthe graph is the average of 20 Monte-Carlo runs. Therandom channel assignment will lead to runtime RSSobservations which are compared with RSS data ob-served at different frequencies and therefore differentfingerprints.
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 10
0 1 2 3 4 5 60.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Horus
Location Error (m)
CD
F
25% of APs perfom DCA
50% of APs perfom DCA
75% of APs perfom DCA
100% of APs perfom DCA
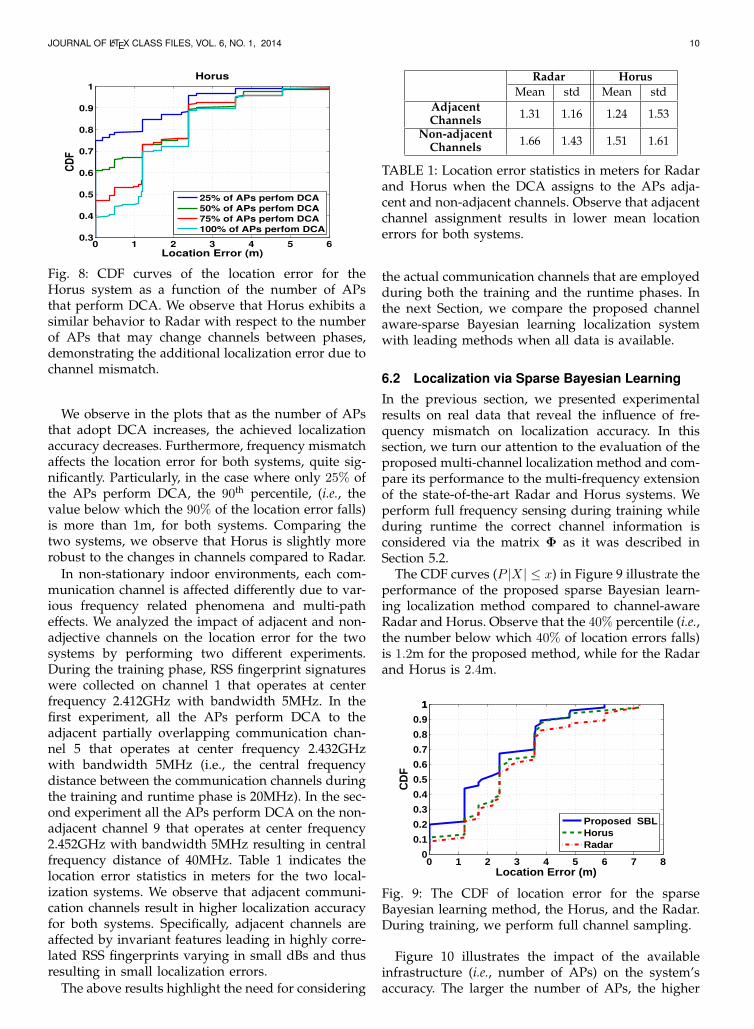
Fig. 8: CDF curves of the location error for theHorus system as a function of the number of APsthat perform DCA. We observe that Horus exhibits asimilar behavior to Radar with respect to the numberof APs that may change channels between phases,demonstrating the additional localization error due tochannel mismatch.
We observe in the plots that as the number of APsthat adopt DCA increases, the achieved localizationaccuracy decreases. Furthermore, frequency mismatchaffects the location error for both systems, quite sig-nificantly. Particularly, in the case where only 25% ofthe APs perform DCA, the 90th percentile, (i.e., thevalue below which the 90% of the location error falls)is more than 1m, for both systems. Comparing thetwo systems, we observe that Horus is slightly morerobust to the changes in channels compared to Radar.
In non-stationary indoor environments, each com-munication channel is affected differently due to var-ious frequency related phenomena and multi-patheffects. We analyzed the impact of adjacent and non-adjective channels on the location error for the twosystems by performing two different experiments.During the training phase, RSS fingerprint signatureswere collected on channel 1 that operates at centerfrequency 2.412GHz with bandwidth 5MHz. In thefirst experiment, all the APs perform DCA to theadjacent partially overlapping communication chan-nel 5 that operates at center frequency 2.432GHzwith bandwidth 5MHz (i.e., the central frequencydistance between the communication channels duringthe training and runtime phase is 20MHz). In the sec-ond experiment all the APs perform DCA on the non-adjacent channel 9 that operates at center frequency2.452GHz with bandwidth 5MHz resulting in centralfrequency distance of 40MHz. Table 1 indicates thelocation error statistics in meters for the two local-ization systems. We observe that adjacent communi-cation channels result in higher localization accuracyfor both systems. Specifically, adjacent channels areaffected by invariant features leading in highly corre-lated RSS fingerprints varying in small dBs and thusresulting in small localization errors.
The above results highlight the need for considering
Radar HorusMean std Mean std
AdjacentChannels 1.31 1.16 1.24 1.53
Non-adjacentChannels 1.66 1.43 1.51 1.61
TABLE 1: Location error statistics in meters for Radarand Horus when the DCA assigns to the APs adja-cent and non-adjacent channels. Observe that adjacentchannel assignment results in lower mean locationerrors for both systems.
the actual communication channels that are employedduring both the training and the runtime phases. Inthe next Section, we compare the proposed channelaware-sparse Bayesian learning localization systemwith leading methods when all data is available.
6.2 Localization via Sparse Bayesian LearningIn the previous section, we presented experimentalresults on real data that reveal the influence of fre-quency mismatch on localization accuracy. In thissection, we turn our attention to the evaluation of theproposed multi-channel localization method and com-pare its performance to the multi-frequency extensionof the state-of-the-art Radar and Horus systems. Weperform full frequency sensing during training whileduring runtime the correct channel information isconsidered via the matrix Φ as it was described inSection 5.2.
The CDF curves (P |X| ≤ x) in Figure 9 illustrate theperformance of the proposed sparse Bayesian learn-ing localization method compared to channel-awareRadar and Horus. Observe that the 40% percentile (i.e.,the number below which 40% of location errors falls)is 1.2m for the proposed method, while for the Radarand Horus is 2.4m.
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
11
Location Error (m)
CD
F
Proposed SBLHorusRadar
Fig. 9: The CDF of location error for the sparseBayesian learning method, the Horus, and the Radar.During training, we perform full channel sampling.
Figure 10 illustrates the impact of the availableinfrastructure (i.e., number of APs) on the system’saccuracy. The larger the number of APs, the higher
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 11
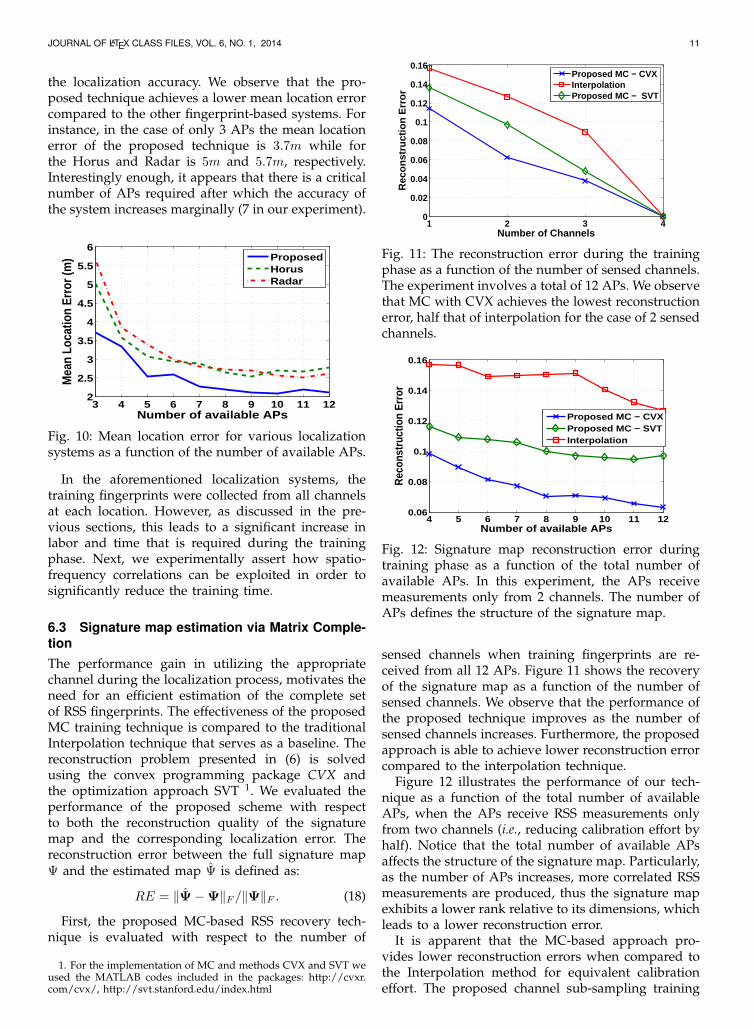
the localization accuracy. We observe that the pro-posed technique achieves a lower mean location errorcompared to the other fingerprint-based systems. Forinstance, in the case of only 3 APs the mean locationerror of the proposed technique is 3.7m while forthe Horus and Radar is 5m and 5.7m, respectively.Interestingly enough, it appears that there is a criticalnumber of APs required after which the accuracy ofthe system increases marginally (7 in our experiment).
3 4 5 6 7 8 9 10 11 122
2.5
3
3.5
4
4.5
5
5.5
6
Number of available APs
Mea
n Lo
catio
n Er
ror (
m)
ProposedHorusRadar
Fig. 10: Mean location error for various localizationsystems as a function of the number of available APs.
In the aforementioned localization systems, thetraining fingerprints were collected from all channelsat each location. However, as discussed in the pre-vious sections, this leads to a significant increase inlabor and time that is required during the trainingphase. Next, we experimentally assert how spatio-frequency correlations can be exploited in order tosignificantly reduce the training time.
6.3 Signature map estimation via Matrix Comple-tionThe performance gain in utilizing the appropriatechannel during the localization process, motivates theneed for an efficient estimation of the complete setof RSS fingerprints. The effectiveness of the proposedMC training technique is compared to the traditionalInterpolation technique that serves as a baseline. Thereconstruction problem presented in (6) is solvedusing the convex programming package CVX andthe optimization approach SVT 1. We evaluated theperformance of the proposed scheme with respectto both the reconstruction quality of the signaturemap and the corresponding localization error. Thereconstruction error between the full signature mapΨ and the estimated map Ψ is defined as:
RE = ‖Ψ−Ψ‖F /‖Ψ‖F . (18)
First, the proposed MC-based RSS recovery tech-nique is evaluated with respect to the number of
1. For the implementation of MC and methods CVX and SVT weused the MATLAB codes included in the packages: http://cvxr.com/cvx/, http://svt.stanford.edu/index.html
1 2 3 40
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Number of Channels
Rec
onst
ruct
ion
Err
or
Proposed MC − CVXInterpolationProposed MC − SVT
Fig. 11: The reconstruction error during the trainingphase as a function of the number of sensed channels.The experiment involves a total of 12 APs. We observethat MC with CVX achieves the lowest reconstructionerror, half that of interpolation for the case of 2 sensedchannels.
4 5 6 7 8 9 10 11 120.06
0.08
0.1
0.12
0.14
0.16
Number of available APs
Rec
onst
ruct
ion
Erro
r
Proposed MC − CVXProposed MC − SVTInterpolation
Fig. 12: Signature map reconstruction error duringtraining phase as a function of the total number ofavailable APs. In this experiment, the APs receivemeasurements only from 2 channels. The number ofAPs defines the structure of the signature map.
sensed channels when training fingerprints are re-ceived from all 12 APs. Figure 11 shows the recoveryof the signature map as a function of the number ofsensed channels. We observe that the performance ofthe proposed technique improves as the number ofsensed channels increases. Furthermore, the proposedapproach is able to achieve lower reconstruction errorcompared to the interpolation technique.
Figure 12 illustrates the performance of our tech-nique as a function of the total number of availableAPs, when the APs receive RSS measurements onlyfrom two channels (i.e., reducing calibration effort byhalf). Notice that the total number of available APsaffects the structure of the signature map. Particularly,as the number of APs increases, more correlated RSSmeasurements are produced, thus the signature mapexhibits a lower rank relative to its dimensions, whichleads to a lower reconstruction error.
It is apparent that the MC-based approach pro-vides lower reconstruction errors when compared tothe Interpolation method for equivalent calibrationeffort. The proposed channel sub-sampling training
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 12
approach can be adopted from various fingerprintinglocalization techniques in order to minimize the ex-haustive calibration phase.
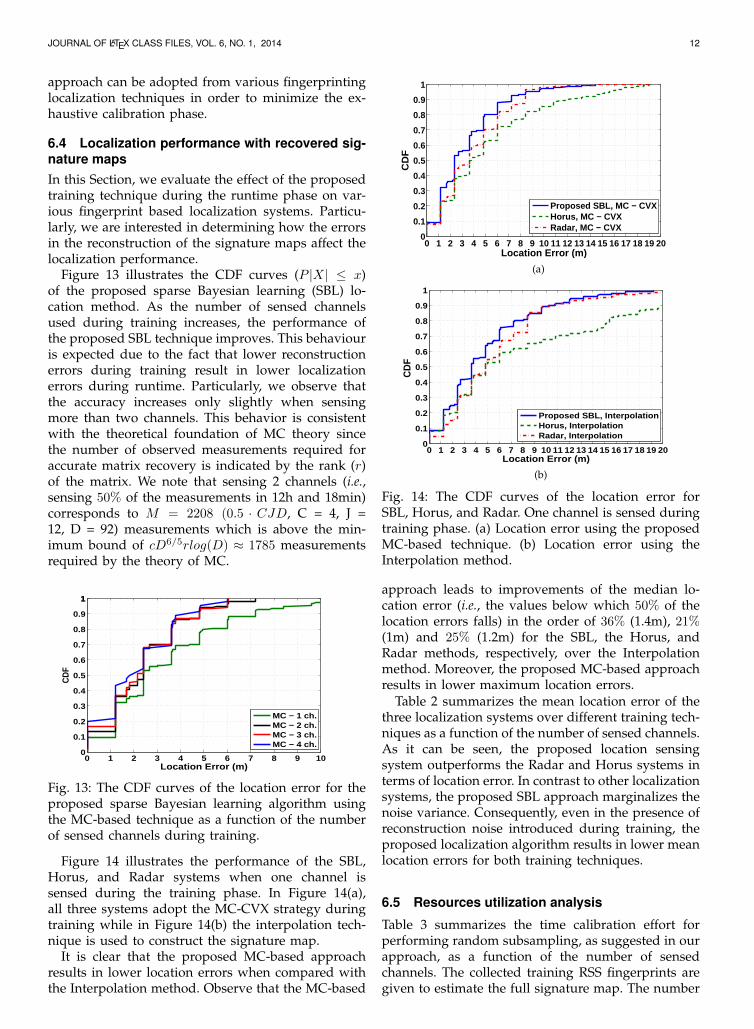
6.4 Localization performance with recovered sig-nature mapsIn this Section, we evaluate the effect of the proposedtraining technique during the runtime phase on var-ious fingerprint based localization systems. Particu-larly, we are interested in determining how the errorsin the reconstruction of the signature maps affect thelocalization performance.
Figure 13 illustrates the CDF curves (P |X| ≤ x)of the proposed sparse Bayesian learning (SBL) lo-cation method. As the number of sensed channelsused during training increases, the performance ofthe proposed SBL technique improves. This behaviouris expected due to the fact that lower reconstructionerrors during training result in lower localizationerrors during runtime. Particularly, we observe thatthe accuracy increases only slightly when sensingmore than two channels. This behavior is consistentwith the theoretical foundation of MC theory sincethe number of observed measurements required foraccurate matrix recovery is indicated by the rank (r)of the matrix. We note that sensing 2 channels (i.e.,sensing 50% of the measurements in 12h and 18min)corresponds to M = 2208 (0.5 · CJD, C = 4, J =12, D = 92) measurements which is above the min-imum bound of cD6/5rlog(D) ≈ 1785 measurementsrequired by the theory of MC.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
11
Location Error (m)
CD
F
MC − 1 ch.MC − 2 ch.MC − 3 ch.MC − 4 ch.
Fig. 13: The CDF curves of the location error for theproposed sparse Bayesian learning algorithm usingthe MC-based technique as a function of the numberof sensed channels during training.
Figure 14 illustrates the performance of the SBL,Horus, and Radar systems when one channel issensed during the training phase. In Figure 14(a),all three systems adopt the MC-CVX strategy duringtraining while in Figure 14(b) the interpolation tech-nique is used to construct the signature map.
It is clear that the proposed MC-based approachresults in lower location errors when compared withthe Interpolation method. Observe that the MC-based
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Location Error (m)
CD
F
Proposed SBL, MC − CVXHorus, MC − CVXRadar, MC − CVX
(a)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Location Error (m)
CD
F
Proposed SBL, InterpolationHorus, InterpolationRadar, Interpolation
(b)
Fig. 14: The CDF curves of the location error forSBL, Horus, and Radar. One channel is sensed duringtraining phase. (a) Location error using the proposedMC-based technique. (b) Location error using theInterpolation method.
approach leads to improvements of the median lo-cation error (i.e., the values below which 50% of thelocation errors falls) in the order of 36% (1.4m), 21%(1m) and 25% (1.2m) for the SBL, the Horus, andRadar methods, respectively, over the Interpolationmethod. Moreover, the proposed MC-based approachresults in lower maximum location errors.
Table 2 summarizes the mean location error of thethree localization systems over different training tech-niques as a function of the number of sensed channels.As it can be seen, the proposed location sensingsystem outperforms the Radar and Horus systems interms of location error. In contrast to other localizationsystems, the proposed SBL approach marginalizes thenoise variance. Consequently, even in the presence ofreconstruction noise introduced during training, theproposed localization algorithm results in lower meanlocation errors for both training techniques.
6.5 Resources utilization analysis
Table 3 summarizes the time calibration effort forperforming random subsampling, as suggested in ourapproach, as a function of the number of sensedchannels. The collected training RSS fingerprints aregiven to estimate the full signature map. The number

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 13
MC (Proposed) Interpolation FS# Channels 1 2 3 1 2 3 4
Radar 4 3.2 2.9 5.7 3.4 3 2.8Horus 5.2 3.5 3.1 8.5 5.8 3.9 2.6SBL
(Proposed) 3.3 2.3 2.2 4.8 3.2 2.8 2
TABLE 2: Average location error in meters for theSBL, Horus, and Radar systems and the MC andInterpolation training techniques as a function of thenumber of sensed channels during training. The FScolumn indicates the performance corresponding tofull frequency sensing during training.
of received fingerprints (third row) is a function ofthe number of sensed channels, the number of APs,and the dimensions of the space. Table 3 also providesthe achieved estimation accuracy for the proposedMC and the interpolation methods. Observe that theproposed MC-approach, for a calibration time of 6hours and 9 minutes (i.e., for one sensed channel)leads to improvements of 26% over the reconstructionerror achieved by the interpolation method.
# Channels 1 2 3 FSCalibration
time 6h 9m 12h 18m 18h 26m 24h 32m
# Fingerpr. 1104 2208 3312 4416Int. error 0.157 0.126 0.089 0MC error 0.114 0.062 0.038 0
TABLE 3: Calibration effort during training time asa function of sensed channels. The last rows indicatethe reconstruction error of the proposed MC techniqueand the Interpolation method. The FS column indi-cates the time effort for full frequency sensing.
Although the power consumption of packet trans-mission and reception is highly hardware depended,studies indicate that in general, power consumptionfollows a linear trend with respect to the number oftransmitted packets. For example, in [42] the authorsproposed a linear function relating the percentageof energy consumption as a function of transmissiontime, x, given by y = 21.24x + 2.68. A similar modelwas also developed in [43] where the power consump-tion (in Joules) for the download of x bytes of datacorresponds to 0.007(x) + 5.9, plus some overhead.Under the linearity assumption, transmission of pack-ets over one out of four channels will result in closeto 75% reduction in power consumption due to WiFicommunications and will have a profound effect onthe lifetime of the mobile device.
7 CONCLUSIONS
Indoor localization is an exciting research field, withnumerous applications. RSS based fingerprint meth-ods offer high accuracy with minimal hardware inter-ventions at the expense of a time consuming calibra-tion process. Furthermore, in dynamic environments,
frequent re-calibration is deemed necessary in orderto maintain high localization accuracy, while dynamicchannel assignments can lead to significant perfor-mance loss. In this work, we address these issuesby proposing a novel multi-channel fingerprint-basedindoor localization technique.
In the proposed scheme, estimation of the completemulti-channel signature map can be achieved from asmall number of measurements over space and fre-quency (channel) by leveraging the power of MatrixCompletion. Furthermore, the Sparse Bayesian Learn-ing paradigm is introduced for the precise localizationduring the runtime phase.
To validate the merits of the proposed scheme, anextensive set of experiments was carried our usingreal data and a comparative analysis with state-of-the-art localization scheme was performed. Experi-mental results suggest that the proposed MC-basedtraining technique can reliably estimate the signaturemap from partial information while sparse Bayesianlearning outperforms traditional localization systems.
ACKNOWLEDGEMENTSThis work was funded by the CS-ORION (PIAP-GA-2009-251605) and HYDROBIONETS (ICT-GA-2011-287613) grantswithin the FP7 European Community.
REFERENCES[1] Yanying Gu, A. Lo, and I. Niemegeers, “A survey of indoor
positioning systems for wireless personal networks,” IEEECommun. Surveys Tutorials, vol. 11, pp. 13–32, March 2009.
[2] Hui Liu, H. Darabi, P. Banerjee, and Jing Liu, “Survey ofwireless indoor positioning techniques and systems,” IEEETrans. Syst. Man Cybern. C, pl. Rev., vol. 37, pp. 1067–1080,November 2007.
[3] Joydeep Biswas and Manuela Veloso, “Multi-sensor mobilerobot localization for diverse environments,” RoboCup 2013:Robot Soccer World Cup XVII, 2013.
[4] S. Papadakis and A. Traganitis, “Wireless positioning usingthe signal strength difference on arrival,” in Proc. IEEE Int.Conf. Mobile Adhoc Sensor Syst., San Francisco, CA, 2010, pp.674–681.
[5] D. Niculescu and B. Nath, “Ad hoc positioning system (aps),”in Proc. IEEE Global Telecommun. Conf., San Antonio, TX, 2001,pp. 2926–2931.
[6] Y. Chen, W. Trappe, and R.P. Martin, “Attack detection inwireless localization,” in Proc. 26th IEEE Int. Conf. Comput.Commun., Anchorage, AK, 2007, pp. 1964–1972.
[7] J. Yang and Y. Chen, “Indoor localization using improved rss-based lateration methods,” in Proc. IEEE Global Telecommun.Conf., Honolulu, Hawaii 2009, pp. 1–6.
[8] K. Kaemarungsi and P. Krishnamurthy, “Modeling of indoorpositioning systems based on location fingerprinting,” in Proc.23th IEEE Int.l Conf. Comput. Commun., Hong Kong, 2004, pp.1012–1022.
[9] P. Bahl and V. N. Padmanabhan, “Radar: an in-building rf-based user location and tracking system,” in Proc. IEEE 19thAnn. Conf. Comput. Commun. Soc., Tel Aviv, 2000, pp. 775–784.
[10] Y Ji, S Biaz, S Pandey, and P Agrawal, “Ariadne: a dynamicindoor signal map construction and localization system,” inProc. Int. Conf. on Mobile Syst., applicat., services, Uppsala, 2006,pp. 151–164.
[11] S. Chieochan, E. Hossain, and J. Diamond, “Channel as-signment schemes for infrastructure-based 802.11 wlans: Asurvey,” IEEE Commun. Surveys Tutorials, vol. 12, pp. 124–136,2010.
[12] M. Boulmalf, T. Aouam, and H. Harroud, “Dynamic channelassignment in ieee 802.11g,” in Int. Wireless Commun. MobileComput. Conf., Crete, 2008, pp. 864–868.
JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, 2014 14
[13] Ian F Akyildiz, Won-Yeol Lee, Mehmet C Vuran, and Shan-tidev Mohanty, “Next generation/dynamic spectrum ac-cess/cognitive radio wireless networks: a survey,” ComputerNetworks, vol. 50, no. 13, pp. 2127–2159, 2006.
[14] Anthony Taok, Nahi Kandil, and Sofiene Affes, “Neuralnetworks for fingerprinting-based indoor localization usingultra-wideband.,” Journal of Communications, vol. 4, no. 5, 2009.
[15] S. Nikitaki, G. Tsagkatakis, and P. Tsakalides, “Efficient train-ing for fingerprint based positioning using matrix comple-tion,” in Proc. IEEE European Signal Process. Conf., Boucharest,2012, pp. 195–199.
[16] A. Haeberlen et al., “Practical robust localization over large-scale 802.11 wireless networks,” in Proc. 10th Ann. Int. Conf.Mobile Comput. Netw., 2004, pp. 70–84.
[17] B. Li, J. Salter, A. G. Dempster, and C. Rizos, “Indoorpositioning techniques based on wireless lan,” in Proc. IEEEInt. Conf. Wireless Broadband Ultra Wideband Commun., Sydney,2006, pp. 13–16.
[18] X. Chai and Q. Yang, “Reducing the calibration effort forprobabilistic indoor location estimation,” IEEE Trans. MobileComput., vol. 6, pp. 649–662, June 2007.
[19] C. Feng, W. Au, S. Valaee, and Z. Tan, “Received signalstrength based indoor positioning using compressive sensing,”IEEE Trans. Mobile Comput, vol. 11, pp. 1983–1993, 2012.
[20] M. Atia, A. Noureldin, and M. Korenberg, “Dynamic online-calibrated radio maps for indoor positioning in wireless localarea networks,” IEEE Trans. Mobile Comput., vol. 99, no.PrePrints, 2012.
[21] R. W. Ouyang et al., “Indoor location estimation with re-duced calibration exploiting unlabeled data via hybrid gen-erative/discriminative learning,” IEEE Trans. Mobile Comput.,vol. 11, pp. 1613–1626, November 2012.
[22] Anshul R., K. Kant C., Venkata N. P., and Rijurekha S., “Zee:Zero-effort crowdsourcing for indoor localization,” in Proc.ACM Mobicom. 2012, pp. 293–304, ACM.
[23] T. King, S. Kopf, T. Haenselmann, C. Lubberger, and W. Ef-felsberg, “Compass: A probabilistic indoor positioning sys-tem based on 802.11 and digital compasses,” in Proc. 1stInt. Workshop Wirel. Netw. testbeds, experimental evaluation andcharacterization, Los Angeles, CA, 2006, pp. 34–40.
[24] M. Youssef and A. Agrawala, “The horus location determina-tion system,” Wireless Netw., vol. 14, pp. 357–374, June 2008.
[25] A.M. Ladd, K.E. Bekris, A.P. Rudys, D.S. Wallach, and L.E.Kavraki, “On the feasibility of using wireless ethernet forindoor localization,” June 2004, number 3, pp. 555–559.
[26] D. Madigan et al., “Bayesian indoor positioning systems,” inProc. IEEE 24th . Int. Conf. Comput. Commun., Miami, FL, 2005,pp. 1217–1227.
[27] H. S. Fang and T. Lin, “Principal component localization inindoor wlan environments,” IEEE Trans. Mobile Comput., vol.11, pp. 100–110, January 2012.
[28] S. Nikitaki and P. Tsakalides, “Localization in wireless net-works via spatial sparsity,” in Proc. Annu. Asilomar Conf.Signals, Syst., Comput., Pacific Grove, CA, 2010, pp. 236–239.
[29] E. Candes, J. Romberg, and T. Tao, “Robust uncertaintyprinciples: Exact signal reconstruction from highly incompletefrequency information,” IEEE Trans. Inform. Theory, vol. 52,pp. 489–509, February 2006.
[30] D. Donoho, “Compressed sensing,” IEEE Trans. Inform. Theory,vol. 52, pp. 1289–1306, April 2006.
[31] S. Nikitaki and P. Tsakalides, “Localization in wireless net-works based on jointly compressed sensing,” in Proc. IEEEEuropean Signal Process. Conf., Barcelona, 2011.
[32] Tzagkarakis G. Papakonstantinou A. Papadopouli M. andTsakalides P. Milioris, D., “Low-dimensional signal-strengthfingerprint-based positioning in wireless lans,” Ad Hoc Net-works, 2011.
[33] X. Zheng, H. Liu, J. Yang, Y. Chen, J. Francisco, RP Martin,and X. Li, “Characterizing the impact of multi-frequency andmulti-power on localization accuracy,” in Proc. IEEE 7th Int.Conf. on Mobile Adhoc and Sensor Syst., 2010, pp. 156–165.
[34] E. Candes and B. Recht, “Exact matrix completion via convexoptimization,” ACM Commun., vol. 55, no. 6, pp. 111–119, 2012.
[35] B. Recht, M. Fazel, and P. Parrilo, “Guaranteed minimum-rank solutions of linear matrix equations via nuclear normminimization,” SIAM Rev., vol. 52, no. 3, pp. 471–501, August2010.
[36] M. Grant and S. Boyd, “CVX: Matlab software for disciplinedconvex programming, version 1.21,” 2011.
[37] R.H. Keshavan, A. Montanari, and Sewoong Oh, “Matrixcompletion from a few entries,” IEEE Trans. Inf. Theory, vol.56, pp. 2980–2998, June 2010.
[38] J. Cai, E. Candes, and Z. Shen, “A singular value thresholdingalgorithm for matrix completion,” SIAM J. on Optimization, vol.20, no. 4, pp. 1956–1982, January 2010.
[39] M. E. Tipping and A. Smola, “Sparse bayesian learning andthe relevance vector machine,” Journal of Machine LearningResearch, vol. 1, pp. 211–244, 2001.
[40] D. P. Wipf, “Sparse estimation with structured dictionaries,”in Advances in Neural Information Processing Systems, vol. 24,pp. 2016–2024. 2011.
[41] M. Tipping, E. and Faul. A., “Fast marginal likelihood maximi-sation for sparse bayesian models,” in Proc. of 9th Int. Workshopon Artificial Intell. and Stat., Key West, FL, 2003, pp. 3–6.
[42] Goran Kalic, Iva Bojic, and Mario Kusek, “Energy consump-tion in android phones when using wireless communicationtechnologies,” in Proc. MIPRO International Convention. IEEE,2012, pp. 754–759.
[43] Niranjan Balasubramanian, Aruna Balasubramanian, andArun Venkataramani, “Energy consumption in mobile phones:a measurement study and implications for network applica-tions,” in Proc. ACM SIGCOMM conf. on Internet Measurements.ACM, 2009, pp. 280–293.
Sofia Nikitaki received her B.S degree in In-formatics and Telecommunications from Na-tional and Kapodistrian University of Athensin 2007 and her PhD in Computer Sciencefrom University of Crete in 2014. She is cur-rently a research scientist at NEC Labora-tories Europe, Germany. Her research inter-ests lie in the area of signal processing withapplications in wireless networks.
Grigorios Tsagkatakis received his B.S.and M.S. degrees in Electronics and Com-puter Engineering from Technical Universityof Crete (TUC), Greece in 2005 and 2007 re-spectively. He was awarded his PhD in Imag-ing Science from the Center for Imaging Sci-ence at the Rochester Institute of Technology(RIT), USA in 2011. He is currently a post-doctoral fellow at the Institute of ComputerScience - FORTH, Greece. His research in-terests include signal and image processing
with applications in sensor networks and imaging systems.
Panagiotis Tsakalides received theDiploma in electrical engineering from theAristotle University of Thessaloniki, Greece,in 1990, and the Ph.D. degree in electricalengineering from the University of SouthernCalifornia (USC), Los Angeles, in 1995. Heis a Professor of Computer Science at theUniversity of Crete, and the head of theSignal Processing Laboratory at the Instituteof Computer Science - FORTH, Greece. Hisresearch interests lie in the field of statistical
signal processing with emphasis in non-Gaussian estimationand detection theory, sparse representations, and applications insensor networks, audio,imaging, and multimedia systems. He hascoauthored over 130 technical publications in these areas, including30 journal papers. He is the PI of the FP7 MC-IAPP ”CS-ORION”project (2010-2014) conducting research on compressed sensingfor remote imaging in aerial and terrestrial surveillance.