konstruktion, bau und numerisch ... - siemens plm...
TRANSCRIPT

Technische Universität Berlin
Institut für Strömungsmechanik und Technische Akustik FG Experimentelle Strömungsmechanik
Prof. Dr.-Ing. C. O. Paschereit
KONSTRUKTION, BAU UND NUMERISCH / EXPERIMENTELLE UNTERSUCHUNG EINES A-
CLASS KATAMARAN FLÜGELRIGGS
DIPLOMARBEIT
Florin Boeck
Geboren am: 15.03.1985
Matrikelnummer: 300609
Eingereicht: 24.05.2012
E-Mail: [email protected]

ii

iii

iv
INHALT
Danksagung .........................................................................................................................................................................vi
Symbolverzeichnis .......................................................................................................................................................... vii
1. Motivation ................................................................................................................................................................... 1
1.1. Beispiele für Flügelriggs .............................................................................................................................. 1
1.2. Vergleich von Flügelrigg und konventionellem Segel ..................................................................... 2
1.3. Der Katamaran, die internationale A-Klasse ....................................................................................... 4
2. Segeln - angewandte Strömungslehre ............................................................................................................. 5
2.1. Auftriebserzeugung von Profilen ............................................................................................................. 5
2.2. Der induzierte Widerstand ...................................................................................................................... 10
2.3. Kräfte und Momente am Boot ................................................................................................................ 11
3. Design des Prototyps ........................................................................................................................................... 16
3.1. Begriffserklärung ......................................................................................................................................... 16
3.2. Konstruktion - Umsetzung der Ideen .................................................................................................. 17
4. Bau des Prototyps ................................................................................................................................................. 20
4.1. Karbonsandwichplatten – die Rippenbasis ...................................................................................... 20
4.2. Leading Edge-Bau ........................................................................................................................................ 21
4.3. CNC-Fräsen ..................................................................................................................................................... 22
4.4. Negativbauweise - Flapfertigung .......................................................................................................... 22
4.5. Oberflächenbearbeitung/Folienbespannung................................................................................... 23
4.6. Lagerung/Trimmeinrichtung ................................................................................................................. 23
5. Untersuchung des Prototypens mit CFD ...................................................................................................... 25
5.1. Grundlagen der numerischen Strömungssimulation.................................................................... 25
5.2. Turbulenzmodellierung ............................................................................................................................ 27
5.3. Gründe zur Wahl von StarCCM+ ............................................................................................................ 30

v
5.4. Validierung der CFD Simulation ............................................................................................................ 31
5.4.1. Geometrie und Setup ........................................................................................................................ 31
5.4.2. Simulation ............................................................................................................................................. 35
5.4.3. Ergebnisse und Schlussfolgerung ................................................................................................ 36
5.5. 2D Untersuchung des Prototyps ............................................................................................................ 40
5.5.1. Geometrie und Setup ........................................................................................................................ 41
5.5.2. Durchführung mit Hilfe eines Makros ....................................................................................... 42
5.5.3. Ergebnis und Auswertung .............................................................................................................. 46
5.5.4. Schlussfolgerung ................................................................................................................................ 54
5.6. 3D Untersuchungen des Prototyps ....................................................................................................... 55
5.6.1. Gitternetzstudie .................................................................................................................................. 55
5.6.2. Physikalische Parameter ................................................................................................................. 58
5.6.3. Ergebnis und Auswertung .............................................................................................................. 59
6. Experimente mit dem Prototypen .................................................................................................................. 68
6.1. Messtechnik ................................................................................................................................................... 68
6.2. Durchführung ................................................................................................................................................ 70
7. Fazit und Aussicht ................................................................................................................................................. 71
Bildnachweis ..................................................................................................................................................................... 73
Tabellenverzeichnis ....................................................................................................................................................... 75
8. Anhang ....................................................................................................................................................................... 78
ISAF International Class Rules A-Class Catamaran ...................................................................................... 78
2D Resultat .................................................................................................................................................................... 80
3D Gitternetzstudie ................................................................................................................................................... 81
3D Untersuchung ........................................................................................................................................................ 83

vi
DANKSAGUNG
Hiermit danke ich Herrn Professor Paschereit für die sehr gute fachliche Betreuung der Diplomarbeit. Er war stets Ansprechpartner und half bei der teilweise schwierigen Organisation des Projekts.
Der TU-Berlin danke ich für die Finanzierung der Projektwerkstatt Flügelrigg mit insgesamt ca. 18.000 €.
Ich bedanke mich ebenfalls bei dem Fachgebiet „Entwurf und Betrieb Maritimer Systeme“ und beim „Fachgebiet Dynamik Maritimer Systeme“ des Instituts für Schiffs- und Meerestechnik für die zur Verfügung gestellte Werkstatt.
Desweiteren danke ich den Sponsoren, ohne die das Projekt Flügelrigg nicht möglich gewesen wäre: Der Firma CTC für Karbon und Arbeitsmaterialien, der Firma DOW für eine große Epoxid-Harz Spende, der Firma Sika ebenfalls für Harz, Becker Marine Systems für die Finanzierung des Messsystems, der Firma MeerSeen für das Sponsoring der Beschläge und der Firma Oracover für die vergünstigte Spezialfolie.
CD-Adapco danke ich für die Software Lizenzen von StarCCM+ und die kostenlose Schulung in Stuttgart.
Insbesondere möchte ich der Firma IBMV in Rostock danken, bei der ich einen Arbeitsplatz sowie die nötige Hardware zur Durchführung der CFD Untersuchungen erhielt, ich danke Kerstin Kramer und Steve Lenonard, stellvertretend für alle Mitarbeiter von IBMV, für vielfältige Ratschläge und Unterstützung bei CFD-Problemen.
Viele der in der Arbeit beschriebenen Ideen und Vorüberlegungen sind im Team entstanden. An der Organisation war maßgeblich Thilo Keller beteiligt. Die ersten Designs wurden von Norman Löffler in CAD Programmen wie MaxSurf und SolidWorks erstellt. Der Bau des Prototyps fand zusammen mit Thilo Keller, Norman Löffler, Bodo Walter, Georg Welselowski, Tobias Wunder und Christoph Braatz statt. Bei Engpässen wurden wir von den Saalbürgern des Schütte-Horn-Saals tatkräftig unterstützt. Vielen Dank an Euch.

vii
SYMBOLVERZEICHNIS
Abkürzungen
AC72 72 Fuß One-Design-Katamaran BOR BMW Oracle Racing CAD Computer Aided Design CAE Computer Aided Engineering CFD Computational Fluid Dynamics CNC Computerized Numerical Control GPS Global Positioning System HD High Definition IBMV Maritime Innovationsgesellschaft ISTA Institut für Strömungstechnik und Technische Akustik JAVA Programmiersprache KS Koordinatensystem LPT1 Line Printing Terminal, Druckerport NACA Nation Advisory Commitee for Aeronautics NASA Nation Aeronautics and Space Administration NMEA National Marine Electronics Association RANSE Reynolds Averaged Navier Stokes Equations SD Secure Digital TFWT Twisted Flow Wind Tunnel VPP Velocity Prediction Program XFLR 5 Strömungsanalyse Werkzeug für Flügel Xfoil Strömungsanalyse Werkzeug für Flügel
Variablen
A Fläche A2DWing Profiloberfläche im 2D Fall bei 1 m Spannweite
AOA Anströmwinkel
AR effektives Streckungsverhältnis
AWA scheinbare Windrichtung (zum Kurs) cD2D Widerstandskoeffizient im 2D Fall
cL Auftriebskoeffizient
cL2D Auftriebskoeffizient im 2D Fall Cε modell spezifischer Koeffizient
Cε1 modell spezifischer Koeffizient

viii
Cε2 modell spezifischer Koeffizient
Cμ modell spezifischer Koeffizient
d Profildicke D2D Widerstand im 2D Fall
f Wachstumsfaktor
F_AD aerodynamischer Widerstand F_AL aerodynamischer Auftrieb
F_AS aerodynamische Seitenkraft
F_AT aerodynamische Gesamtkraft
F_AX aerodynamische Vortriebskraft Fboot Gewichtskraft des Boots
F_HD hydrodynamischer Widerstand
F_HT hydrodynamische Gesamtkraft Fsegler Gewichtskraft des Seglers
FT2D Gesamtkraft im 2D Fall
FX2D Vortiebskraft im 2D Fall
k kinetische Energie L Auftrieb
L2D Auftrieb im 2D Fall
Lchar charakteristische Länge Mxboot krängendes Moment
N Anzahl
p Druck P durchschnittlicher Druck
Re Reynoldszahl
s Abstand
SMi Quellterm t Zeit
ui Geschwindigkeitskomponenten
Ui gemittelte Geschwindigkeitskomponenten v ungestörte Anströmgeschwindigkeit
V10 Referenzgeschwindigkeit auf 10 m Flügelhöhe
VA scheinbare Windgeschwindigkeit
VS Bootsgeschwindigkeit VW wahre Windgeschindigkeit
xi Richtungskomponenten
ygboot Hebelarm vom Gewichtsschwerpunkt des Boots ygsegler Hebelarm vom Gewichtsschwerpunkt des Seglers
α Hauptwinkel

ix
β Flapwinkel
β1 modell spezifischer Koeffizient
β* modell spezifischer Koeffizient Γ Zirkulation
γ Winkel des hinteren Elements
δ Schichtdicke δGS Grenzschichtdicke
δij Kronecker Symbol
δLuft Luftdichte
ε Kraftwirkungsrichtung μ dynamische Viskosität
μt turbulente Wirbelviskosität
ν kinematische Viskosität ξ isotrope Dissipationsrate
ρ Dichte
σk modell spezifischer Koeffizient
σε modell spezifischer Koeffizient τij viskoser Spannungstensor
ϕ Durchschnittswert eines Strömungsparameters
ω induzierter Anstellwinkel ф ein Strömungsparameter
ф' Schwankungswert eines Strömungsparameters

1. MOTIVATION
1.1. BEISPIELE FÜR FLÜGELRIGGS
Flügel werden im Bootsbau seit Jahrzehnten bei Geschwindigkeitsrekordversuchen genutzt, in denen Praktikabilität und Anpassungsfähigkeit an extreme Wetterbedingungen eine untergeordnete Rolle spielen. Ein Meilenstein für diese Entwicklung ist mit dem Erscheinen des Buches „The 40-knot Sailboat“ 1963 von Bernard Smith gegeben (1).
Der America’s Cup 1988 wurde in Folge eines Streits zwischen dem Verteidiger, dem amerikanischen Team von Dennis Connor und dem Herausforderer, dem neuseeländischen Team um Sir Michael Fay, als Deed of Gift Race ausgetragen. Somit mussten ausschließlich die Initialregeln, die seit der Stiftung des America’s Cup 1857 feststehen, eingehalten werden. Die Amerikaner entschieden sich für ein unkonventionelles Design. Da die Regeln zwar die Länge der Wasserlinie des Rumpfes auf 44 bis 90 Fuß beschränken aber keine Bestimmungen zu Rumpfform- bzw. Riggdesign machen, entwickelte das amerikanische Team für einen vergleichsweise kleinen Katamaran mit Flügelrigg. Die Neuseeländer bauten eine riesige Einrumpfyacht mit 90 Fuß Wasserlinie und großen Überhängen. Das als ungleiches Duell (Mis-Match) in die Geschichte eingegangene Rennen wurde überraschend von dem halb so langen amerikanischen Stars and Stripes-H3 Katamaran mit einer starren Tragfläche gegen die neuseeländische KZ1 Einrumpfyacht mit 40 Mann Besatzung gewonnen (2).
Abbildung 1-1 Kontrahenten des Mis-Match AC 1988 (3)
Äußerst professionell unternimmt das Vestas-Sail-Rocket Team seit 2002 auf der Grundlage der Ideen von Bernard Smith Geschwindigkeitsweltrekordversuche und verwendet einen Aerohydrofoiler – also ein Boot, welches die Vorteile eines Flügelriggs mit denen von Hydrofoils kombiniert (4). Dessen Tragflächen erzeugen über und unter Wasser Kraftkomponenten in entgegengesetzten Richtungen auf ein und derselben Kraftwirkungslinie. Somit entstehen keine

2
krängenden Momente. Die Vestas-Sail-Rocket fährt geschwindigkeitsunabhängig stabil. Abbildung 1-2 zeigt die Vestas-Sail-Rocket in Fahrtrichtung. Erkennbar ist das Flügelrigg, das um 30 Grad geneigt auf seiner Basis befestigt ist und eine in grün dargestellte aerodynamische Kraftkomponente generiert. Der rot illustrierte hydrodynamische Kraftanteil, der durch das Hydrofoil generiert wird, weist in entgegengesetzte Richtung. Ziel des Teams ist es, mit einer Geschwindigkeit von 60 Knoten oder mehr zu segeln. (5)
Abbildung 1-2 Vestas Sail Rocket, Ausgleich von aero- und hydrodynamischen Kräften
Der 33. America’s Cup 2010 wurde aufgrund von Uneinigkeiten der Kontrahenten erneut als Deed of Gift-Rennen ausgetragen. Als sich das schweizer Verteidiger-Team Alinghi für einen Katamaran entschied, antwortete das amerikanische Entwickler-Team von BMW Oracle (BOR) mit einem Trimaran Design, welches einen 68 m hohen Starrflügel anstelle der konventionellen Segel verwendete. Dieser Flügel ist um 50% größer als eine Tragfläche des Airbus A 380 und hat einen entscheidenden Anteil an den 150 Millionen Dollar Entwicklungskosten. (6) Der Trimaran BOR 90 gewann 2:0 bei Schwach-Wind Bedingungen. Bei den Vorbereitungen wurden mit dem Entwurf 28 Knoten Bootsgeschwindigkeit bei 10 Knoten Windgeschwindigkeit erreicht. Im ersten Rennen des Cups segelte der Trimaran trotz kleinerer Segelfläche auf Am-Wind-Kursen dem Team-Alinghi sogar ohne Fock davon; ein Resultat, das für die überlegene Effizienz von gut designten Starrflügeln gegenüber Hochleistung-Stoff-Segeln spricht. Der im September 2013 in San Francisco stattfindende 34. America’s Cup wird ausschließlich von 72 Fuß One-Design Katamaranen (AC72) ausgetragen. Jedes der Boote wird mit einem 40 m hohen Flügel und 260 m2 Segelfläche ausgestattet sein. Zu erwarten sind spektakuläre Geschwindigkeiten.
1.2. VERGLEICH VON FLÜGELRIGG UND KONVENTIONELLEM SEGEL
Segel sind heutzutage keine ebenen Baumwolltücher, die nach Erfahrungswerten geschneidert werden und an Rahen dem Wind möglichst viel Widerstand entgegenbringen sollen. Die heute meist verwendete Segelform ist das bermudagetakelte Schratsegel. Es werden Hightech- Materialien wie Kohlefaser und Aramide verwendet, die in laminierten Kunststofffolien

3
verarbeitet sind. Da diese Art von Segeln ähnlich wie Tragflächen eines Flugzeuges funktionieren, wird bei der Herstellung darauf geachtet, das Segel so zu formen, dass eine optimale Profilform in der Anströmung entsteht. Um dieses Ziel schnell und optimal zu erreichen, werden im Vorfeld CFD-Untersuchungen und Windkanalversuche in speziellen Anlagen, wie dem Twisted Flow Wind Tunnel (TFWT) der Yacht Research Unit in Auckland, durchgeführt. Die Firma North Sails „backt“ ihre 3Di Segel auf großen, individuell anpassbaren Formen mit Heizstrahlern, um die vorher errechnete Form zu realisieren (7).
Segel funktionieren besonders gut, wenn der Wind konstant weht und sich das Profil ausprägen kann. Bei wenig Wind killen Segel gegebenenfalls, und erzeugen dabei wenig Vortriebskraft. Das stehende Gut, der Mast, der Baum und die Wanten ermöglichen das Setzen der Segel. Moderne Materialien und Forschung haben auch hier zu einer Verbesserung beigetragen, so dass die heutigen Masten leichter, profiliert, mit-drehend und schmaler sind. Sie können jedoch genauso große oder sogar größere Lasten als frühere Modelle aus massiven Holz aufnehmen. Auch in diesem Bereich wird von der schnellen Entwicklung der Kohlefaserverarbeitung profitiert. Dennoch hat der Mast einen negativen Einfluss auf die Anströmung des Segels. Hinter dem Mast entstehen Ablösegebiete und Totwasserzonen, in denen das Tuch nicht effektiv arbeitet (Abb. 1-3).
Abbildung 1-3 Ablösung hinter dem Mast
Ein besonders großes Streckungsverhältnis (Profillänge/Profilsehne) der Tragfläche ermöglicht große Auftriebsbeiwerte bei geringen Widerstandsbeiwerten, da widerstandserhöhende 3D-Effekte, wie Randwirbel, die Gesamtumströmung weniger beeinflussen. Aus diesem Grund besitzen beispielsweise Segelflugzeugtragflügel extrem große Streckungsverhältnisse. Die Umströmung eines sehr hohen und schmalen Segels würde allerdings weit mehr vom Nachstromfeld des Mastes beeinflusst werden. Der Vorteil eines großen Streckungsverhältnisses würde daher nicht zum Tragen kommen.
Den genannten Erkenntnissen kann mit dem Design eines starren Flügels begegnet werden, der auch bei wenig Wind eine optimale Profilform besitzt, nicht flattert, keine Einflüsse eines Mastes erfährt und in einem bestmöglichen Streckungsverhältnis gefertigt werden kann. Zusätzlich sind Entwicklungen aus der Luft- und Raumfahrt, wie z.B. Sloted Flaps, adaptierbar, die das Potenzial besitzen, einen Flügel noch effektiver gegenüber konventionellen Segeln zu machen.

4
1.3. DER KATAMARAN, DIE INTERNATIONALE A-KLASSE
Ein Katamaran kann höhere Geschwindigkeiten erreichen als ein Einrumpfboot gleicher Länge. Die beiden weit auseinander stehenden Rümpfe ermöglichen eine hohe Querstabilität, die durch Ballastieren des luvwärtigen Rumpfes noch zu vergrößern ist. Somit sind große Segelflächen für hohe Geschwindigkeiten möglich. Gleichzeitig können die einzelnen Rümpfe schlank und strömungsgünstig gebaut werden. Bei genügend Wind kann zusätzlich der windzugewandte Rumpf durch Krängung aus dem Wasser steigen, sein Anteil am hydrodynamischen Widerstand entfällt dann.
A-Class Katamarane, im Folgenden als A-Kat bezeichnet, sind Zweirumpfboote, die einhand gesegelt werden. Die Klasse ist seit 1956 eine freie Konstruktionsklasse. Sie gehört zu den weltweit ältesten aktiv gesegelten Katamaranklassen. Aufgrund der minimalen Einschränkung des Designs ist den Konstrukteuren und Seglern die Möglichkeit gegeben, die Regattaboote zu verändern und zu optimieren.
Entscheidene vorgegebene Konstruktionsmerkmale1:
Länge: 5,49 m Breite: 2,30 m Segelfläche: 13,94 m2 Mindestgewicht: 75 kg
Diese große Freiheit motiviert Designer Rumpfform, Schwerter, Ruder, Trimmmöglichkeiten, Trampolinposition, Mastlänge, Mastprofilform, Materialien und Segelschnitt kontinuierlich zu verbessern. Das Ziel, besser als die Konkurrenz zu sein und der Jahrzehnte währende Wettbewerb, hat als Ergebnis die schnellste Klassenflotte unter den Einhandkatamaranen mit einer Yardstickzahl von 76 hervorgebracht (8), (9).
Ziel der vorliegenden Diplomarbeit ist es, den Prototyp eines Flügels für den A-Kat innerhalb der Klassenvorschriften zu bauen und zu untersuchen. Ausgehend von der Erörterung der theoretischen Grundlagen in Kapitel 2 werden das Design und der Bau des Prototyps in Kapitel 3 und 4 dokumentiert. Der Schwerpunkt der Arbeit liegt in der numerischen Modellierung der Umströmung des Flügelriggs mit Hilfe moderner CFD-Methoden, wobei in Kapitel 5 eine Validierung des numerischen Models diskutiert wird und die Ergebnisse der 2D und 3D Simulationen ausgewertet werden. Kapitel 6 beschreibt die Tests des Prototyps auf dem Wasser. Abschließend werden die gewonnenen Erkenntnisse zusammengefasst. Die auf der CD befindlichen Daten sind nicht nur der Vollständigkeit halber beigefügt, sie vermitteln mit Hilfe einer Slide Show die Strömungscharakteristik des Flügels und können zum Vergleich weiterer Optimierung herangezogen werden.
1 Die kompletten Klassenregeln befinden sich im Anhang.

5
2. SEGELN - ANGEWANDTE STRÖMUNGSLEHRE
2.1. AUFTRIEBSERZEUGUNG VON PROFILEN
Eine Tragfläche bzw. ein Flügel ist ein Körper, der eine Kraft quer zur Strömungsrichtung erzeugt. Der Auftrieb resultiert aus dem durchschnittlichen Druckunterschied zwischen Ober- und Unterseite. Profile sind zweidimensionale Querschnitte von Tragflächen in Strömungsrichtung, deren spezielle Form sich im Besonderen zur Erzeugung von dynamischem Auftrieb bei geringem Strömungswiderstand eignen. Beispiele dafür finden sich in der Natur bei Vögeln und Fischen und wurden in der Technik adaptiert. Für verschiedene Einsatzgebiete eignen sich unterschiedliche Profile, je nach Geschwindigkeit und umgebendem Medium. Die wichtigste Kennzahl für die Profilumströmung ist die Reynoldszahl. (10 S. 29)
charvLRe ⋅=
υ (2.1)
Betrachtet wird ein Profil in einem inkompressiblen2, homogenen Fluid, welches durch Adhäsions- und Zähigkeitswirkungen beeinflusst wird und demzufolge Reibung und Widerstand innerhalb des umgebenden Mediums erfährt.
Zur Erklärung des Auftriebes wird das Konzept der zweidimensionalen Strömung herangezogen. Die Profiltheorie erklärt die Entstehung von Auftrieb nicht an einem dreidimensionalen Flügel, sondern an einem senkrechten Schnitt zur Flügelspannweite. Diese Strömung kann mit ausreichender Genauigkeit in einem Windkanal simuliert werden. Dafür wird ein gerader Abschnitt eines Flügelteils zwischen zwei Platten, die die Umströmung der Flügelspitzen verhindern, montiert und die Strömung in der Mitte des Tragflügels untersucht. „Das Studium der zweidimensionalen Strömung bildet den Ausgangspunkt für die Theorie des Auftriebes und Widerstandes realer Tragflügel endlicher Spannweite (11 S. 172).“
Die Zirkulation ist eine Modellvorstellung, um das Phänomen des Auftriebes von Profilen anschaulich zu erklären. Auftrieb entsteht z.B. durch die Addition einer homogen Anströmung und einer durch einen rotierenden Zylinder bewegten Strömung um einen Kreiszylinder (Abbildung 2-1):
2 Wasser ist inkompressibel. Luft kann bei moderaten Geschwindigkeiten als inkompressibel angesehen werden. Erst bei 45 m/s relativer Windgeschwindigkeit wird Luft zu einem halben Prozent komprimiert. Ein starker Sturm der Windstärke 12 entspricht 33 m/s. Somit ist die Annahme einer inkompressiblen Strömung im hier betrachteten Anwendungsfall berechtigt.

6
Abbildung 2-1 Prinzipdarstellung der Zirkulation, Umströmung eines Zylinders
Durch Reibung an der Oberfläche des sich drehenden Zylinders wird das umgebende Fluid in Rotationsbewegung versetzt. Bei der gleichförmigen Anströmung aus einer Richtung wird die resultierende Strömung oberhalb des Zylinders beschleunigt und unterhalb abgebremst. Den Bernoulli’schen Gesetzen zufolge entsteht eine Druckverteilung auf der Oberfläche des Zylinders, deren Folge eine Kraft entlang der Anströmungsrichtung ist (der Widerstand) und eine Kraft senkrecht zur Anströmung (der Auftrieb) (12 S. 2 - 5).
Im Gegensatz zum rotierenden Zylinder muss ein Tragflügel nicht rotieren, um Auftrieb zu erzeugen. Wie die unterschiedlichen Geschwindigkeiten auf Ober- und Unterseite des Profils zustande kommen, wurde von Kutta, Joukowsky und Prandtl untersucht und erklärt (11 S. 186ff). Ein asymmetrisch gewölbter Tragflügel, der ohne Anstellwinkel angeströmt wird, zeigt folgendes Phänomen (Abb. 2-2): Betrachet man bei Beginn des Strömungsvorganges zwei Teilchen, die sich gleichzeitig und mit gleicher Geschwindigkeit von der Nase des Flügels aus auf der Ober- bzw. auf der Unterseite des Profils bewegen, dann würde das untere Teilchen die Profilhinterkante als erstes erreichen, da sein Weg kürzer ist. Da in inkompressiblen Medien kein Dichteunterschied auftreten kann, muss sich das untere Teilchen um die Profilkante bewegen, um sich gemeinsam mit dem oberen Teilchen abzulösen. In hoch viskosen, langsam strömenden Medien ist dieser Vorgang wie beschrieben zu beobachten. Da aber in Luft und bei hohen Geschwindigkeiten die Energie, die nötig wäre, um die scharfe Profilhinterkante zu umströmen extrem groß wäre, löst die Strömung bereits an der Hinterkante ab. Es entsteht ein Anfahrwirbel zwischen Abrisskante und potenzial theoretischem Staupunkt. Sobald sich der Anfahrwirbel zu drehen beginnt, resultiert infolge des Satzes zur Drehimpulserhaltung eine entgegengesetzte Zirkulationsströmung um das Profil. Diese Zirkulationsströmung beschleunigt die Teilchen auf der Profiloberseite und bremst jene auf der Unterseite. Damit ist die Kutta-Joukowski Abströmbedingung erfüllt und es entsteht Auftrieb.

7
Abbildung 2-2 Prinzipskizze Zirkulationsentstehung
Nach dem Satz von Kutta-Joukowski ist der Auftrieb L proportional zur Zirkulation Γ:
0Lv=−ρ⋅⋅Γ (2.2)
NACA PROFILE
Es handelt sich hierbei um Profile, die vom National Advisory Committee for Aeronautics (NACA 1915-1958, dann NASA) für den Entwurf von Tragflächen entwickelt wurden. Die Eigenschaften sind nicht ausschließlich für Flugzeugflügel sondern auch für axiale Strömungsmaschinen wie Propeller, Turbinen und Rotoren oder von Wasser umströmte Körper wie Schrauben, Kiele und Schwerter relevant. Seit 1933 wurden im Langley Research Center hunderte von Profilvariationen untersucht. Die geometrischen Eigenschaften der Profile sind in ihrer Bezeichnung codiert. Es existieren verschiedene Serien, angefangen mit der vierstelligen Serie bis hin zur Achter-Serie und Untervariationen. Im Folgenden erfolgt eine Beschränkung auf die vierstellige Serie. Die vier Ordnungsziffern repräsentieren drei geometrische Werte des Profils: Profilwölbung, Wölbungsrücklage und Profildicke. Sie können in Gleichungen eingesetzt werden, die der Berechnung des genauen Querschnitts der Tragfläche dienen. Somit ist die Geometrie klar definiert. Da das Flügelrigg sowohl für Wind von Steuerbord als auch von Backbord gleichermaßen effektiv arbeiten soll, muss das Profil symmetrisch gestaltet sein. Das heißt, die Profilwölbung und die erste Ziffer der Bezeichnung sind Null. Ohne Profilwölbung ist die Wölbungsrücklage ebenfalls Null. Symmetrische NACA Profile haben daher zwei Nullen als Anfangswerte des 4-Digid Codes - NACA 00XX - und können entsprechend folgender Formel beschrieben werden:

8
( )234dy0.2969x0.1260x0.3516x0.2843x0.1015x0.2
±=−−+− (2.3)
Wobei y die halbe Profildicke an der jeweiligen Position x repräsentiert und d die maximale Dicke ist. (13)
EINFLUSS DER MAXIMALEN PROFILDICKE
Bei der Auslegung von Profilen spielen verschiedene Faktoren eine Rolle:
• In welchem Medium soll das Profil arbeiten? • Welcher Geschwindigkeitsbereich ist relevant? • Wie stark variiert der Anstellwinkel? • Welche Auswirkungen hat ein Strömungsabriss?
Wenn sich Designer für ein symmetrisches 4-Digid NACA Profil entschieden haben, ist die prozentuale maximale Profildicke der einzig veränderbare Parameter, um das Profil den 4 genannten Faktoren anzupassen.
Aus den systematischen Untersuchungen zur NACA Serie geht hervor, dass Profile gleicher Sehnenlänge mit größerer maximaler Profildicke zwar mehr Wiederstand (Drag) und weniger Auftrieb (Lift) produzieren, dass sie jedoch „gutmütiger“ gegenüber sehr dünnen Profilen sind, die schon bei geringer Anströmwinkelerhöhung zu Ablösung und Strömungsabriss neigen. Aus diesen Erkenntnissen heraus muss ein Kompromiss zwischen Performance bei optimaler Anströmung und Segelleistung bei ungünstigeren Anströmverhältnissen (Winddreher, Nachstromfeld eines Kontrahenten und Trimmfehler) gefunden werden.
MEHRELEMETIGE PROFILE - EINFLUSS VON SLOTS
In der Luftfahrt kommen verschiedene Auftriebshilfen an Tragflächen zum Einsatz, eine davon sind Flaps (Klappen). Sie werden an den Abströmkanten der Tragflächen verwendet, um die Flügeleigenschaften bei besonderen Situationen zu beeinflussen. Ein Slot ist eine Lücke zwischen einer oder mehreren Flaps. Die Tragflächen eines A 340-300 Linienflugzeugs sind für den Langstreckenflug in 11.000 m Höhe bei einer Geschwindigkeit von ca. 900 km/h optimiert, d.h. sie erzeugen in diesem Fall den geringstmöglichen Widerstand bei ausreichendem Auftrieb. Allerding muss das Flugzeug auch in der Lage sein, mit ca. 290 km/h sicher abzuheben und mit ca. 220 km/h zu landen. Die Tragflächen allein könnten nicht genügend Auftrieb bei derartig geringen Geschwindigkeiten liefern, um die 275 Tonnen Startgewicht in die Luft zu bringen. Desweitern soll während des Landeanfluges Widerstand erzeugt werden, um die Geschwindigkeit des Flugzeugs trotz hoher Sink Rate zu verzögern (14).
Flaps haben drei entscheidende Vorteile: Sie reduzieren den nötigen Anstellwinkel bei maximalem Auftrieb, sie können symmetrischen Profilen eine „Wölbung“ geben und sie

9
verzögern die Ablösung auf der Saugseite des Profils. In der Geschichte der Luftfahrt wurden verschiedene Flapdesigns erprobt und in Windtunnelexperimenten untersucht. Für das Flügelrigg spielen viele dieser Designs allerdings keine Rolle, da die geforderte Mit-Schiffs-Symmetrie mit ihnen nicht realisierbar ist. Abbildung 6 zeigt Konstruktionsvarianten von Flaps. Plain Flap (A): Einfache Klappe oder auch “Kontrollklappe”, birgt bei Anstellwinkeln >15° Gefahr des Strömungs-abrisses auf Saugseite, der Auftriebsgewinn ist klein bei relativ großer Widerstandszunahme. Slotted Extern Flap (B): Verzögerte Ablösung, erhöhter Auftrieb, geringe Widerstandszunahme, Beschleunigung der Luft durch den Schlitz, Ablösung der Strömung erst bei hohen Anstellwinkeln. Double-Slotted Flap (C): Verwendung im modernen Flugzeugbau, Kombi-nation Effekte der single slotted Flap mit denen von Fowler-Flaps. (Strömungsverbesserung durch Verlängerung der oberen Lippe des vorherigen Elements.)
In der Regel werden einfache Klappen (Abb. 2-3 A) nicht zur Auftriebssteigerung verwendet, da sie zu schnell einen Strömungsabriss verursachen. Sie eignen sich allerdings zur Fluglagekontrolle. Hier bewirken kleine Anstellwinkel Drehmomente, mit denen ein Flugzeug steuerbar wird.
Zur Maximierung des Auftriebs sind Klappen geeignet, die einen gewissen Abstand zum Hauptprofil besitzen (Abb. 2-3 B, C). Mit Hilfe dieser Anordnung kann die Ablösung auf der Klappe verzögert werden (12 S. 5 - 1 ff.).
Abbildung 2-3 Konstruktionsvarianten von Flaps

10
2.2. DER INDUZIERTE WIDERSTAND
Die bisher dargestellten theoretischen Überlegungen sind auf die zweidimensionale Umströmung von Profilen anwendbar. Da jedoch in der Realität stets drei dimensionale Probleme vorliegen, müssen weitere Besonderheiten beachtet werden. Tragflächen finiter Spannweite erzeugen auch Fluidbewegungen entlang der Tragflächen, also quer zur Anströmung. Die Druckdifferenz zwischen Saug- und Druckseite kann nur durch die räumliche Trennung aufgrund der Tragfläche selbst erhalten bleiben. An den Flügelspitzen gleicht sich die Druckdifferenz aus. In Folge dessen kommt es auf der Druckseite zu einer zur Spitze gerichteten Strömung, auf der Saugseite zu einem von der Spitze weg strömenden Fluss. Die Strömung, welche die Abströmkante verlässt, erzeugt folglich eine Schicht von unstetigen Bewegungsrichtungen der Luft, welche Ursache für die Bildung von Wirbeln ist. Diese instabilen Wirbelsysteme vereinen sich zu einer Wirbelschleppe in der Nähe der Flügelenden. Aufgrund der Drehbewegung des Wirbels entsteht eine von der Saug- zur Druckseite gerichtete Strömung (beim Flugzeug von oben nach unten, Downwash genannt; beim Segelboot von Leeseite zu Luvseite). Dieser Effekt verstärkt sich bei zunehmender Auftriebserzeugung. Durch Kombination der freien Anströmung mit dem Downwash kann der induzierte Anstellwinkel ω berechnet werden. Prandtl zeigte, dass Flügel mit elliptischer Auftriebsverteilung einen konstanten Downwash entlang der Tragfläche besitzen und dass der induzierte Anstellwinkel analytisch berechenbar ist (10 S. 41 ff):
LcAR
ω=π⋅ (2.4)
Beim Vergleich von 2D Profil-Auftriebswerten mit 3D Werten muss der induzierte Anstellwinkel unbedingt beachtet werden, da er auf den 2D Anstellwinkel aufgeschlagen werden muss um, vergleichbar in 3D rechnen zu können.
Die Erzeugung der Wirbel kostet Energie, die die Effizienz des Flügels reduziert. Sie wird induzierter Wiederstand genannt.

11
2.3. KRÄFTE UND MOMENTE AM BOOT
Die vorangegangenen Abschnitte beschreiben die theoretische Auftriebserzeugung von Tragflächen. Wie aber kann die Physik genutzt werden, um ein Segelboot in eine gewünschte Richtung zu bewegen?
Auf ein fahrendes Segelboot wirken Kräfte, die folgendermaßen eingeteilt werden können, um die Kinematik zu verstehen (Abb. 2-4):
Abbildung 2-4 Kräfte an einem Segelboot
Bei der Bewegung durchs Wasser entsteht hydrodynamischer Widerstand F_HD, dessen Ursachen unterschiedlicher Natur sind, hier aber nicht weiter diskutiert werden sollen. Der hydrodynamische Widerstand ist der Fahrtrichtung entgegengesetzt. In Folge des kleinen aber nicht zu vernachlässigenden Abdriftwinkels λ werden der Rumpf, und somit auch der Kiel bzw. die Schwerter, unter demselben Anstellwinkel angeströmt. Die Anhänge rufen aufgrund ihrer profilierten Form „Auftrieb“ hervor, allerdings quer zur Fahrtrichtung - die hydrodynamische Seitenkraft F_HS. Damit eine Kraft entsteht, welche das Boot in Bewegung bringt, wird der Wind (effektiver scheinbarer Wind VA) benötigt. Auch der Wind umströmt das Segel - oder in unserem Falle den Flügel - unter einem bestimmten Anstellwinkel. Dadurch entsteht wiederum ein Widerstand in Strömungsrichtung und Auftrieb senkrecht zum Einfallwinkel des Windes. Die Addition der beiden aerodynamischen Kräfte ergeben eine resultierende aerodynamische Gesamtkraft F_AT, die sich in eine aerodynamische Vortriebskraft F_AX und Seitenkraft F_AS aufteilen lässt. Vom Betrag entsprechen diese den hydrodynamischen Kräften, sind ihnen allerding entgegengesetzt. Der hier beschriebene Zustand wird als Equilibrium bezeichnet. Die Kräfte (und Momente) stehen im Gleichgewicht. (11 S. 8 ff)
Ein Schiff bewegt sich in der Grenzregion zweier Medien, Wasser und Luft. Da der Wind durch Reibung an der Wasseroberfläche gebremst wird, ist die Windgeschwindigkeit höhenabhängig. Diese Grenzschicht der Atmosphäre ist jener Bereich, in dem die Windgeschwindigkeit in der Nähe der Wasseroberfläche von ihrem ungestörten Wert auf Null zurückgeht. Die Höhe der Grenzschicht schwankt in Abhängigkeit von Ort, Tages- und Jahreszeit. Charakteristische Werte

12
liegen bei einigen hundert Metern. Der Mast bzw. Flügel eines Bootes unterliegt also dem Einfluss der atmosphärischen Grenzschicht. Genauer betrachtet kann die Grenzschicht in 3 Bereiche eingeteilt werden: Die laminare Unterschicht (max. 1 mm), Prandtl-Schicht (bis 20 m - 60 m) und die Ekman-Schicht. In der für Ingenieure interessantesten Schicht, der Prandtl-Schicht, erfolgt die Geschwindigkeitszunahme logarithmisch. An ihrer Obergrenze sind 70% der Geschwindigkeit der ungestörten Strömung erreicht (15 S. 6 f). Bezieht man sich auf eine Referenzgeschwindigkeit in 10 m Höhe (V10) kann folgende Gleichung zur Beschreibung des Geschwindigkeitsprofils in Abhängigkeit der Höhe z genutzt werden (16):
( )W10
zln0.01VzV10ln
0.01
=⋅ (2.5)
Da sich ein Segelboot mit einer Eigengeschwindigkeit v bewegt, erfährt es Fahrtwind. Da es zusätzlich im Windfeld ist, überlagern sich wahrer Wind und Fahrtwind. Segler unterscheiden sprachlich den wahren Wind und den scheinbaren Wind (Summe aus wahrem Wind und Fahrtwind), sowie die wahre Windrichtung und die scheinbare Windrichtung. Die Überlagerung des über die Höhe konstanten Fahrtwindes und dem mit der Höhe stärker werdenden wahren Wind bewirkt auch eine von der Höhe abhängige scheinbare Windrichtung. Um das Segel bzw. den Flügel über die Höhe unter dem gleichen Winkel anzuströmen, muss der Flügel um die Z-Achse verdreht werden, ihm wird ein Twist gegeben. In dem folgenden fiktiven Beispiel hat der wahre Wind in der Referenzhöhe von 10 m eine Geschwindigkeit von V10 = 5.2 m/s, also ca. 10 Knoten, die Segelyacht macht Vs = 3.5 m/s – 6.8 Knoten Fahrt hart am Wind (der Kurs liegt 45° relativ zum wahren Wind). Durch Addition der Anströmgeschwindigkeiten von wahrem Wind VW (blau) und Fahrtwind ≙ Vs (grün) ergibt sich der scheinbare Wind VA (rot), (Abb. 2-5).
Abbildung 2-5 Überlagerung von Wind- und Fahrtgeschwindigkeit zum scheinbaren Wind
0 1 2 3 4 5 6 7 8 9
10
0 2 4 6 8 10
Mas
thöh
e [m
]
Anströmgeschwindigkeit [m/s]
Windprofil am Mast einer Segelyacht
V_W (z)
V_S
V_A(Z)

13
Die Richtung, aus der der Wind kommt, variiert ebenfalls mit der Höhe. In diesem Beispiel erfährt der Mastfuß ausschließlich den Fahrtwind direkt von vorn, das Masttop hingegen erfährt den Fahrtwind von vorn und zusätzlich den wahren Wind aus 45°. Die Vektoraddition liefert man den scheinbaren Wind aus 27° relativ zum gesegelten Kurs. Folglich muss das Segel bzw. der Flügel bei diesen Bedingungen um 27° über die Höhe getwistet werden, um in jeder Höhe unter einem konstanten Anstellwinkel angeströmt zu werden.
SEGELN SCHNELLER ALS DER WIND?
Ein Katamaran wie der A-Kat erfährt wenig hydrodynamischen Widerstand. In der folgenden Betrachtung wird er der Anschaulichkeit halber anfangs vernachlässigt.
Abbildung 2-6 zeigt drei Segelzustände: 1. Der Katamaran steht bei Halbwind (AWA = 90°), die Bootsgeschwindigkeit VS ist null, der wahre Wind weht konstant mit VW. 2. Durch Aufnehmen an Fahrt wird der Flügel in Abhängigkeit der Richtungsänderung des scheinbaren Windes dichter genommen. Die Bootsgeschwindigkeit gleicht der wahren Windgeschwindigkeit V S = VW , AWA = 45° 3. Das Verhältnis VS/VW wird größer; der scheinbare Wind fällt immer vorlicher ein, AWA wird kleiner. Ab einem bestimmten AWA steht die resultierende aerodynamische Gesamtkraft FAT senkrecht zur Bewegungsrichtung -> die maximal mögliche Geschwindigkeit ist erreicht.
Abbildung 2-6 Scheinbarer Wind
AWA
AWA
AWA
VW
VW
VW
VA
VA
VS
VS FAT FAL
FAD
1
2
3

14
Im dritten Teil der Abbildung ist zu erkennen, dass der aerodynamische Gütegrad des Flügels eine entscheidende Rolle bei der Ermittlung der maximal möglichen Geschwindigkeit spielt. Ziel ist es, so viel wie möglich Lift FAL bei minimalem Drag FAD zu produzieren, damit der resultierende Aerodynamische-Gesamtkraft-Vektor FAT möglichst weit in Fahrtrichtung zeigt.
Gleiches gilt für die hydrodynamischen Eigenschaften des Rumpfes und der Anhänge, welche die Maximalgeschwindigkeit eines Bootes ebenfalls limitieren. (11 S. 131 f)
STABILITÄT - KRÄNGENDES MOMENT VS. AUFRICHTENDES MOMENT
Aus dem vorangegangenen Abschnitt könnte nun geschlussfolgert werden, Ziel sei es, allein das Verhältnis von Lift/Drag des Flügels zu maximieren. Das ist vordergründig auch korrekt, allerdings müssen die Randbedingungen beachtet werden: Bei der Erzeugung von Kräften am Flügel ersteht aufgrund der Wirkungsrichtung, dem Angriffspunkt und dem Hebelarm zum Drehpunkt des Boots ein Moment um die Längsachse des Katamarans: Das krängende Moment. Übersteigt dies das aufrichtende Moment krängt das Boot bis zu einem gewissen Grad und kentert. Die weit auseinander stehenden Rümpfe von Katamaranen bieten die Basis für eine hohe Querstabilität und durch Ballastieren des luvseitigen Rumpfes kann das Stabilitätsmoment erhöht werden. Im Falle des A-Kats, reitet der von einem Trapez gehaltene Steuermann das Boot aus und ballastiert somit den luvseitigen Rumpf. Sein Gewicht und seine Position balancieren das am Flügel angreifende krängende Moment aus. Die in der folgenden Abbildung eingezeichneten Kräfte sind auf die Bildebene projiziert. Sie sind die Hauptursachen für das krängende und aufrichtende Moment um den Drehpunkt des Kats.

15
Wie berechnet sichist das maximal verträgliche krängende Moment MXboot? Hierzu wird das Momentengleichgewicht um den Drehpunkt des Boots betrachtet:
XbootgbootbootgseglerseglerMyFyF=⋅+⋅
(2.6)
Bei einem Bootsgewicht von 75 kg und einem 85 kg schweren Segler dessen Schwerpunkt 1 m außerhalb des Bootes liegt ergibt sich ein maximales aufrichtendes bzw. krängendes Moment von 3400 Nm.
Gewichtskraft-Segler Gewichtskraft-Boot
aerodynamische Seitenkraft
Drehpunkt
Abbildung 2-7 Momente um die Längsachse

16
3. DESIGN DES PROTOTYPS
3.1. BEGRIFFSERKLÄRUNG
(1) Hauptelement (2) Flap (3) Hinteres Element (4) Flügelspitze (5) Mastfuß (6) Leading Edge (7) Rippen (8) Folie (9) Rumpf (10) Schwerter (11) Ruder (12) Want (13) Vorstag (14) Anemometer (15) Kamera (16) Anschlagspunkt von Wanten und Vorstagen (17) Twistkontrolle (18) Großschot
(1)
(2)
(4)
(5)
(6)
(7)
(8)
(9)
(10) (11)
(12)
(13)
(14)
(15)
(16)
(17) (18)
Abbildung 3-1 Prinzipskizze A-Kat mit Flügel

17
(1) Hauptelement (2) Flap (3) Hinteres Element (4) KS - Lager (5) KS - Mastfuß (6) Hauptwinkel α (7) Flapwinkel β (8) Anstellwinkel des hinteren Elements γ (9) Slot
3.2. KONSTRUKTION - UMSETZUNG DER IDEEN
Aus aerodynamischer Sicht würde ein freistehender Flügel, der seine Profilform den Anströmbedingungen anpassen könnte und zugleich in der Höhe kontrolliert verdrehbar ist, das Optimum sein. Allerdings muss beim Entwurf darauf geachtet werden, ein Design zu entwickeln, welches auch allen anderen Randbedingungen genügt. Einerseits soll keine bauliche Veränderung der Plattform erfolgen, um eine Umrüstung zum konventionellen Rigg jederzeit möglich zu machen. Andererseits muss gewährleistet sein, bei steuerbord- und backbordseitigem Wind gleich gute Segeleigenschaften zu erreichen. Neben den aerodynamischen Eigenschaften müssen außerdem Festigkeits- und Stabilitätsreserven eingeplant werden.
Diese Einschränkungen schließen einen freistehenden Flügel aus, da der existierende Mastfuß keine Lagermomente gegen Kippen des Flügels aufnehmen kann. Diese Tatsache macht eine Sicherung mittels Vorstagen und Wandten notwendig, welche allerdings die Bewegungsfreiheit des Flügels eingrenzen. In der Konsequenz ist der Flügel nur in einem Bereich von ca. ± 50° drehbar.
Abbildung 3-2 Winkel- und Koordinatenerläuterung

18
Bei besonderen Anströmverhältnissen, beispielsweise auf einem Raumschotkurs bei geringer Fahrtgeschwindigkeit, kommt es zu einer Anströmung von querab. Da ein optimaler Anströmwinkel von symmetrischen Profilen bei 10° ± 5° liegt, müsste ein einfaches Profil um 80° ± 5° aus der Mitschiffsebene ausgelenkt werden. Weil eine derart große Auslenkung aufgrund der Wanten nicht möglich ist, muss der Flügel in mehrere separat bedienbare Elemente aufgeteilt werden. Als Folge ist der Flügel also kein einzelnes symmetrisches Profil mit einem kleinen Operationsbereich, sondern ein den Gegebenheiten anpassbares asymmetrisches Profil mit einer einstellbaren Profilwölbung.
Ähnlich wie beim Tragflügel eines Flugzeuges beim Start, kann mit verschiedenen Elementen dafür gesorgt werden, dass auch bei größeren Anstellwinkeln die Strömung am Profil anliegt und nicht ablöst. Bei der hier beschriebenen Konstruktion wird der Slot-Effekt ausgenutzt. Die sinnvolle Nutzung dieses Effekts ist, wie spätere Kapitel zeigen, abhängig von der Strömungsgeschwindigkeit, dem Anstellwinkel und der Größe des Slots. Da der Segler den Flügel an die Umgebungsbedingungen anzupassen hat, muss die Slot-Größe einstellbar sein. Um diese Forderung zu erfüllen, wurde eine anstellbare Klappe konstruiert, welche am Ende des Hauptelements beginnt und vor dem hinteren Element endet – die Flap.
Die Profilform wurde auf der Grundlage von Berechnungen mit Hilfe des potenzialtheoretischen XFLR 5 Codes festgelegt. XFLR 5 ist ein Analysewerkzeug für Tragflächen, Flügel und Flugzeuge welche bei kleinen Reynoldszahlen operieren und basiert auf XFoil. Die Berechnungen sind von cand. Ing. Norman Löffler durchgeführt worden und führten zu der Entscheidung, das NACA 0015 Profil für das Hauptelement und das NACA 0010 Profil für das hintere Element zu nutzen.
An dem Flügel sind mittels Schoteneinstellung 4 Trimmmöglichkeiten realisierbar:
(i) Mit der Großschot kann der gesamte Flügel der Windrichtung angepasst werden. Der Großschotangriffspunkt liegt hinter dem aerodynamischen Druckschwerpunkt, damit klappt sich der Flügel zusammen und „depowert“, wenn keine Schoten belegt sind oder falls der Steuermann nicht reagiert.
(ii) Die Kontrolle der Profilwölbung variiert den Winkel zwischen Hauptelement und hinterem Element, dadurch entsteht eine Lücke im Profil – der Slot.
(iii) Mit Hilfe der Flapkontrolle lässt sich der Winkel zwischen Hauptelement und Flap variieren und somit die Slotbreite anpassen. Sowohl das hintere Element als auch die Flap sind auf derselben Drehachse gelagert. Somit ist immer die gleiche Slotanpassung gewährleistet, da der Abstand zwischen Hinterkante-Flap und Vorderkante-hinteres Element bei der Drehung gleich bleibt.
(iv) Ein besonderes Kennzeichen ist die Twistkontrolle des Flügels. Der innerhalb des Profils drehbar gelagerte Mast ist nur auf 6 m Flügelhöhe fest mit dem Flügel verbunden. Somit kann

19
der obere Teil des Flügels optimal der scheinbaren Windrichtung angepasst werden. Der untere Teil des Profils ist durch einen Hebel relativ zum oberen Teil verdrehbar.
Für einen Regattaerfolg ist einfaches Handling eine notwenige Voraussetzung . Deshalb wurde die Einstellung des Flügels so konzipiert, dass das System selbstwendend ist. Das heißt, beim Kreuzen gegen den Wind fällt der Flügel mit den getroffenen Einstellungen für den Kurs Richtung Luvtonne nach einer Wende in die gleichen Einstellungen zurück, nämlich symmetrisch zur Mitschiffslinie.
Ein weiteres funktionsbedingtes Designfeature ist die Teilbarkeit. In einer Höhe von 6 m kann der Flügel auseinander genommen bzw. zusammen gesteckt werden, was für Fertigung Transport und Lagerung günstig ist. Oberhalb der Teilung ist der Anschlagspunkt für Wanten, Stagen und Trapeze konzipiert. Somit wird der obere 4 m Teil des Flügels auf den unteren Teil durch die Wantenspannung gezogen. Das Oberteil wird auf den um 50 cm herausragenden Mast des Untereils aufgeschoben und erhält eine formschlüssige Verbindung. Die hinteren Elemente von ober- und Unterteil werden durch einen Karbonstift fixiert.
Strukturell besteht der Flügel aus einer Hülle, welche die Oberfläche der zuvor designten Profilform bildet. Horizontale Rippen unterstützen die Festigkeit der Hülle und sorgen für die Erhaltung der Profilform bei Anströmung, wenn Normalkräfte an der Oberfläche angreifen. Das am stärksten beanspruchte Bauteil des Flügels ist der Mast, der innerhalb der Profilform verborgen ist. Der Anschlagspunkt der Vorstagen, Wanten und Trapeze befindet sich in einer Höhe von 6,5 m. Der Kraftfluss ist folgendermaßen: Die aus der Umströmung des Flügels resultierenden Kräfte werden von der Flügeloberläche auf die Rippen übertragen. Auf einer Flügelhöhe von 0 bis 7 m besitzt jede Rippe eine passgenaue Aussparung, durch welche der Mast in seiner Position gehalten wird. An dieser Stelle wird die Kraft von den Rippen zum Mast übertragen. Durch den Mast wird sie zu den Vorstagen, den Wanten und Trapezen bzw. nach unten zum Mastfuß und der Großschot geleitet.
Bei der Konstruktion musste insbesondere auf das Gewicht des Riggs geachtet werden, um den Schwerpunkt des A-Kats nicht unnötig zu erhöhen und um so dicht wie möglich am Minimalgewicht der Klassenvorschriften von 75 kg zu bleiben. Bei einem Rumpfgewicht von 45 kg sollte das fertige 10 m hohe Flügelrigg nicht mehr als 30 kg wiegen. Die Oberfläche des Flügels ist aus verschiedenen modernen Materialien hergestellt worden. Um die richtige Form des Profils zu garantieren, wurde von der Profilnase bis zur maximalen Breite des Profils eine feste Struktur aus einem Carbonsandwich gebaut. Ab 25 % der Sehnenläge fand eine Spezialfolie der Firma Oracover3 Einsatz, welche unter thermischer Belastung schrumpft und eine glatte Oberfläche garantiert. Die Folie ist an der festen Struktur des vorderen Flügelteils befestigt, liegt über den Rippen und klebt an einem Steg vor dem Beginn der Flap.
3 http://www.oracover.de/

20
4. BAU DES PROTOTYPS
Der gesamte Flügel wurde aus Faserverbundwerkstoffen gefertigt, die Vorteile liegen auf der Hand – Freiheit der individuellen Anpassung eines Bauteils an die zu erfüllende Funktion bei geringem Gewicht und hohem Belastungsvermögen. Allerdings muss bei der Fertigung darauf geachtet werden, in welcher Richtung das Bauteil belastet wird.
Anisotrope Karbonfasern haben in Faserrichtung eine sehr hohe Festigkeit bei geringer Bruchdehnung. Die Festigkeit normal zur Faserrichtung ist ein Bruchteil dessen. Mehrere tausend Kohlefasern, sogenannte Filamente von etwa 5-8 Mikrometern Durchmesser, werden zu einem Bündel zusammengefasst und mit Webmaschinen zu textilen Strukturen weiter verarbeitet. Für den Bau des Flügels wurde ein 160 g/m2 Kohlefasergewebe sowie ein 360 g/m2 bi-axial Gelege verwendet. Als Matrix kam ein Epoxidharz-System der Firma DOW bzw. Sika zum Einsatz, welches bei Raumtemperatur verarbeitet werden kann und eine Topfzeit von 90 min hat. Der Faser/Volumenanteil wird auf 40/60 geschätzt. Die Dichte des ausgehärteten Bauteils beträgt ca. 1,7 g/cm3 (Vergleich Aluminium: 2,7 g/cm3). In den folgenden Abschnitten sind die wichtigsten Fertigungsschritte beschrieben.
4.1. DIE RIPPENBASIS - KARBONSANDWICHPLATTEN
Als Ausgangsbauteil für die Herstellung der Rippen wurden mehrere Karbonsandwich-Platten hergestellt. Dazu wurden das 160 g/m2 Gewebe und eine 4 mm starke Honeycomb-Aramidwabe als Kernstruktur verwendet. Die Aramidwabe besteht aus einer wasserunlöslichen Kombination von Aramidfasern und einem Phenolharz. Durch die hexagonal angeordnete Zellkonstruktion ist sie sehr gut verformbar und kann sich auch Formen mit kleinen Radien anpassen. Das von der Rolle kommende Kohlefasergewebe wurde zurechtgeschnitten und auf einer, auf der Arbeitsplatte fixierten, luftdichten Folie ausgerollt. Die Fasern sind mit dem zuvor angemischten Epoxidharz-System getränkt worden. Dabei war darauf zu achten, jede Stelle gleich gut zu benetzen. Im Anschluss wurde die passende Aramidwabe auf die feuchte Kohleschicht gelegt und mit einer zweiten frisch getränkten Karbonfaserschicht bedeckt. Auf diese Schicht sind Lochfolie und Fließ gelegt worden. Als Deckschicht kam eine zweite luftdichte Folie zum Einsatz, die mit der untersten Lage Vakuumfolie durch eine Dichtmasse luftdicht verbunden wurde. An einer Kante des so entstandenen luftdichten Sacks ist ein Schlauch eingeführt worden, durch welchen die im Sack verbliebene Luft mittels Vakuumpumpe abgesaugt werden konnte. Der Filz garantierte einen gewissen Abstand zwischen Folie und Bauteil, durch den Luft aus jedem Bereich der Platte entwich. Die Lochfolie ließ überschüssigen Harz aus dem Bauteil in den Filz sickern. Je nach Epoxidharz-System war das Bauteil nach ca. 12 Stunden ausgehärtet und konnte weiterverarbeitet werden.
Durch Wasserstrahlschneiden wurden die fertigen Platten (1 m x 2m) gemäß der erstellten CAD Daten in Rippenform gebracht.

21
Abbildung 4-1 v. l. n. r.: Karbongelege, Laminieren, Aramid-Honeycomp, Bauteil in Vakuumfolie, fertige Rippe
4.2. LEADING EDGE-BAU
Die feste Struktur der Profilvorderkante wurde ähnlich dem Sandwichplattenbau gefertigt. Anstelle des ebenen Tisches ist zunächst eine Positivform aus Styrodurelementen mit einem GFK Coating vorbereitet worden.
Somit erhält man eine steife und zugleich leichte Struktur, welche die Windströmung optimal leiten kann ohne dabei zu flattern. Die hohle Vorderkante des Flügels wurde durch Rippen mittels eines handaufgelegten Winkellaminats auf der Innenseite in einem Abstand von 0,5 m horizontal befestigt.
Wie bereits erwähnt, werden die Kräfte über den Mast aus dem Flügel geleitet, welcher in den Rippen zwischen 0 und 7 m steckt. Oberhalb des 7 m langen Masts wird das hohle Profilvorderteil durch einen Steg geschlossen und erhält somit zusätzliche Stabilität. Die Leading Edge des hinten Elements wurde auf ähnliche Art- und Weise gefertigt, wobei hier der Schaumkern in dem Profilforderteil verblieb und Glas- anstelle von Kohlefasern verwendet wurden. Der Schaumkern ist zuvor mittels CNC-Fräse aus Styrudurplatten in Längsrichtung gefertigt worden.
Abbildung 4-2 v. l. n. r.: Styrodurelemente, geschliffene Styrodur-Positivform mit Karbonsandwich, Vakuumprozessierung der Leading Edge, Flügeloberteil aus Karbon

22
4.3. CNC-FRÄSEN
Eine CNC-Fräse ist ein sehr gutes Hilfsmittel bei der Fertigung von 3D Formteilen. CNC - Computerized Numerical Control - Fräsen werden von einem automatisch erstellten Fräsprogramm in Abhängigkeit von CAD–Daten gesteuert. Dazu ist ein Steuerungsrechner mit entsprechender Software notwendig. Die CAD-Daten dürfen keine Unstetigkeitsstellen aufweisen, d.h. alle Oberflächen müssen geschlossen sein. Es darf keine Hinterschneidungen geben und das Format muss mit der CNC-Software kompatibel sein. Das Fräsprogramm wurde per CAD2CNC Software – SolidCAM erstellt, welches dann wiederum vom CNC-Steuerungsrechner in einen Maschinen-Code umgewandelt wurde. WINCNC erfüllt diesen Zweck. Der Steuerrechner übergibt per LPT1-Schnittstelle Signale an die Hardware der Fräse, welche die Schrittmotoren ansteuert, um im richtigen Maßstab die Fräskonturen abzufahren. Zum Einsatz kam die Basic 1500 Tisch-CNC-Fräse von cncconcept. Mit der Fräse erfolgten folgende Arbeitsschritte: Fräsen der Rippen des hinteren Elements aus den Karbonsandwichplatten. Erstellung der Positivform für die Leading Edge des hinteren Elements und Fertigung der Negativform für die Erstellung der Flaps.
Abbildung 4-3 v. l. n. r.: CNC-Fräse mit Steuerrechner, gefräste Elemente der Leading Edges für das hintere Flügelelement, Fräse im Einsatz mit Staubschutz
4.4. NEGATIVBAUWEISE - FLAPFERTIGUNG
Mit Hilfe der CNC-Fräse konnten passgenaue Schaumformen der Bauelemente erstellt werden. Da der Schaumstoff nicht die nötige Festigkeit als nutzbares Bauteil besitzt, mussten die Muster abgeformt werden. Eine Alternative zur Positivformkonstruktion, die an der Leading Edge eingesetzt wurde, stellt die Negativvariante dar. Die gefräste Form bildet die spätere Außenfläche des fertigen Bauteils. Demzufolge muss in die Form laminiert werden.
Nach mehreren Tests mit Kohlefaser (einlagig) und Stegen zur Aussteifung oder zweilagigem Glasfasergewebe (160 g/m2) entschieden wir uns für einen einlagigen Glasfaser-Aramidwabe-Glasfaser Sandwichaufbau, der leicht und beulsteif ist. Die Stoßkanten der ausgehärteten Profilhälften wurden nachgeschnitten und mit einem Epoxidharz-Glasfaserpulver-Gemisch verklebt.

23
Abbildung 4-4 v. l. n. r.: Gefräste Negativformen, Sandwichfertigung, fertige Flapelemente unterschiedlicher Sehnenlänge
4.5. OBERFLÄCHENBEARBEITUNG/FOLIENBESPANNUNG
Alle Oberflächen wurden mit Schwingschleifern und per Hand geschliffen, Dellen wurden mit schnellhärtendem Epoxidspachtel ausgebessert und nachgeschliffen. Nach dem Umbau der Werkstatt zu einer Lackiererei konnte der Flügel mit einer dünnen Schicht Epoxid-Filler grundiert und im Anschluss mit weißem Autolack gespritzt werden. Die Flächen zwischen der festen Struktur der Vorderkante, den Rippen und der Abströmkante wurden mit einer Schrumpffolie aus dem Segelflugzeugbau bespannt. Dazu wurden die Ränder mit doppelseitigem Klebeband beklebt und im Anschluss die Folie am Rand mit transparentem Klebeband ein weiteres Mal fixiert. Die während des Spannprozess entstandenen Falten wurden mittels thermischer Behandlung geglättet.
Abbildung 4-5 v. l. n. r.: Gespachteltes Flügelelement auf 6m Höhe, Hauptelement nach Lackierung, gespannte Folie, Folie nach Bearbeitung mit Heißluft
4.6. LAGERUNG/TRIMMEINRICHTUNG
Der Flügel ist so konstruiert, dass das Hauptelement durch die Verstärkung des Masts und die Abspannung mittels Vorstagen und Wanten, das tragende Element ist. Am Ende des Hauptelements werden die Flap und das hintere Element auf einer Drehachse gelagert. Zum Bau der Lager entschieden wir uns für die Verwendung des bi-axial Geleges von 360 g/m2, mehrere Schichten des Geleges bilden eine hochfeste Struktur, welche die Lagerkräfte aufnehmen und in die Flügelstruktur einleiten kann. Jeweils zwei Platten im Abstand von 5 mm wurden an die Hinterkante des Hauptelementes gebaut und vertikal durchbohrt. Beim hinteren

24
Flügelelement wurden die jeweiligen Rippen nach vorn verlängert und zwischen die Lagerplatten des Hauptelementes geführt. Die Drehachse bilden ausgebohrte und abgedrehte M8 Schrauben, welche auch in die Löcher der Flap-Endkappen gesteckt werden. Somit haben das hintere Element und die Flap dieselbe Drehachse.
Abbildung 4-6 v. l. n. r.: Lager Hinterkante Hauptelement, Lager mit Drehachse und Flap, Flügelzusammenbau
Die Steuerung der einzelnen Elemente und des Twists geschieht über Schoten. Neben der Ergonomie der Anordnung, musste auf leichtgängigen Schotlauf sowie präzises Einstellverhalten geachtet werden. Der Segler muss in der Lage sein, mit der einen Hand das Boot zu steuern und mit der anderen das Rigg zu bedienen.
Alle Schoten sind an der Unterkante des Flügels zusammengeführt und von beiden Seiten bedienbar. Beim Bau wurde Wert auf eine ausreichende Dimensionierung des Karbons im Bereich des Großschotanschlagspunkts gelegt. Der Großschotanschlagspunkt liegt hinter dem Druckpunkt des Flügels, somit klappt der Flügel zusammen, wenn Winddruck auf dem Flügel lastet und die Cambereinstellung nicht fixiert ist. Aufgrund dieser Anordnung ist auch die Selbstwende-Eigenschaft gegeben.
Abbildung 4-7 v. l. n. r.: Twistkontrolle, Cambereinstellung, Flapkontrolle (horizontal)

25
5. UNTERSUCHUNG DES PROTOTYPS MIT CFD
Ziel der numerischen Strömungsuntersuchung des Flügelriggs ist eine Empfehlung zur Flügeleinstellung in Abhängigkeit von Windgeschwindigkeit, Windrichtung, Kurs und Fahrtgeschwindigkeit. Mit dem empfohlenen Setup soll eine maximale Vortriebskraft bei vertretbarem krängendem Moment erzielt werden.
5.1. GRUNDLAGEN DER NUMERISCHEN STRÖMUNGSSIMULATION
Für die numerische Berechnung von Strömungsphänomenen wird eine Kontinuum-Hypothese aufgestellt. Die molekulare Struktur von Fluiden bleibt unberücksichtigt. Ihr Verhalten kann durch makroskopische Eigenschaften finiter Elemente beschrieben werden. Des Weiteren kann die Kompressibilität der Luft aufgrund der geringen Strömungsgeschwindigkeiten vernachlässigt werden, sodass das Modell eines inkompressiblen, viskosen Fluids Anwendung findet. Ein drei-dimensionales, inkompressibles, viskoses Fluid wird durch den Zusammenhang von Kontinuitätsgleichung, den drei Impulsgleichungen und dem Energieerhaltungssatz beschrieben. Diese fünf Transportgleichungen sind von den Erhaltungssätzen der Physik abgeleitet und formen ein System nichtlinearer Differentialgleichungen. Da bei dem hier behandelten Problem kein Energietransport stattfindet, braucht der Energieerhaltungssatz nicht betrachtet werden.
KONTINUITÄTSGLEICHUNG
Die Kontinuitätsgleichung beruht auf der Massenerhaltung. Um die Kontinuitätsgleichung herzuleiten, wird eine Massenbalance für ein Fluidelement herangezogen. Der Massenzuwachs innerhalb des Elements gleicht dem Massenfluss über alle Begrenzungsflächen des Elements. Aufgrund der Inkompressibilität bleibt die Dichte dabei konstant. In Index-Schreibweise kann dieser Zusammenhang folgendermaßen ausgedrückt werden:
i
i
u 0x∂
=∂ (5.1)
Wobei ui die Geschwindigkeitskomponenten und xi die Richtungskomponenten darstellen.
IMPULSGLEICHUNGEN
Die Impulsgleichungen geben die Aussage des zweiten Newtonschen Gesetzes wieder: Die Änderung des Impulses eines Körpers (auch eines Fluidelements) gleicht der Summe der Kräfte, welche auf ihn wirken. Man unterteilt zwei Kraftarten: Die Oberflächenkräfte wie Druck oder viskose Kräfte und Volumenkräfte, also die Gravitationskraft und Zentrifugalkräfte. Die Impulsgleichung ist folgendermaßen definiert:

26
ijiiiMi
jii Quelltermtransienter Term Druckgradientdiffusiver Termkonvektiver Term
uu puStxxx
∂τ∂∂ ∂ρ+ρ=−++∂∂∂∂
(5.2)
Dabei sind ρ die Dichte, ui die Geschwindigkeiten in die Richtungen xj, t ist die Zeit, p der statische Druck und τij der viskose Spannungstensor, wobei der Index i für die Ebene steht, in der die Spannung wirkt und j für die Richtung der Spannung bezeichnet. Der Quellterm beinhaltet die Volumenkräfte. (17 S. 25)
NAVIER-STOKES GLEICHUNGEN
Die Navier-Stokes Gleichungen drücken die Impulserhaltung für Newtonsche Fluide aus. Zusammen mit der Kontinuitätsgleichung ergibt sich ein System nichtlinearer Differentialgleichungen, die das mathematische Modell der Strömungsmechanik bilden. Somit kann sowohl laminares als auch turbulentes Strömungsverhalten, z.B. in der Grenzschicht, beschrieben werden. Für nicht kompressible Fluide homogener Dichte vereinfacht sich die Form der Navier-Stokes Gleichung. Die inkompressiblen Navier-Stokes Gleichungen stellen ein geeignetes Modell zur Beschreibung von Luftströmungen weit unterhalb der Schallgeschwindigkeit sowie für Wasserströmungen oder flüssige Metalle dar. Die Herleitung aus der Impulsgleichung erfolgt durch Implementierung des Newtonschen Spannungsmodells. Da bei nicht kompressiblen Fluiden keine Raumänderung der Elementarvolumina auftreten kann, vereinfacht sich der Spannungstensor zu einer linearen Beschreibung von 9 viskosen Spannungskomponenten:
jiij
ji
uuxx
∂∂τ=µ⋅+ ∂∂ (5.3)
Wobei μ die konstante dynamische Viskosität ist.
Durch Substitution von (5.3) in (5.2) erhält man die Navier-Stokes Gleichung für inkompressible Fluide:
jiiijMi
jijji
uuuu puStxxxxx
∂∂∂∂ ∂∂ρ+=−+µ++∂∂∂∂∂∂ (5.4)
Zusammen mit der Kontinuitätsgleichung resultiert ein geschlossenes System von 4 gekoppelten nicht-linearen partiellen Differentialgleichungen und 4 Unbekannten (ux, uy, uz, p). Dieses System ist nur für sehr einfache geometrische Anordnungen analytisch lösbar. Die Lösung komplexerer Strömungen erfordert einen hohen Bedarf numerischer Ressourcen und führt zu Konvergenz Problemen. (17 S. 160 ff)

27
5.2. TURBULENZMODELLIERUNG
Wenn die Reynoldszahl einen kritischen Wert übersteigt, wird die Fluidströmung instabil und erfolgt der Übergang von laminarer zu turbulenter Strömung erfolgt. Turbulente Strömungen haben eine große praktische Bedeutung, da viele Fluidbewegungen bei Ingenieurproblemstellungen turbulent sind. Wesentliche Aspekte der Turbulenz sind der turbulente Diffusionsprozess, die viskose Dissipation kinetischer Energie und eine erhebliche Fluktuation der Wirbelstärke chaotischer Fluidbewegungen. Die turbulente Diffusion leitet einen räumlichen Austausch kinetischer Energie aufgrund von irregulären Fluktuationsbewegungen und rotierenden Strömungsphänomenen von Wirbeln und Strudeln ein. Viskose Dissipation dieser kinetischen Energie resultiert aus einer Energiekaskade durch Übertragung kinetischer Energie von großen zu immer kleiner werdenden Wirbelstrukturen, bei denen der Einfluss intermolekularer Wechselwirkungen eine immer größere Rolle spielt. Die kinetische Energie wird aufgrund viskoser Effekte in innere Energie des Fluids umgewandelt. Eine Simulation dieser Vorgänge ist in besonderen Fällen möglich (direkte numerische Simulation). Dafür ist aufgrund der Dimension der kleinsten Wirbelstrukturen eine extrem feine Gitterauflösung und als Folge der chaotischen, mit der Zeit veränderlichen Strukturen auch eine sehr feine Zeitauflösung unumgänglich. Für praxisnahe Problemstellungen ist eine direkte Simulation auf absehbare Zeit daher unmöglich. Eine Variante dem Problem zu begegnen ist, die Ergebnisse der Navier-Stokes Gleichungen zu mitteln und Turbulenzmodelle in kritischen Regionen anstelle der Simulation zu verwenden. (17 S. 265)
REYNOLDS-GEMITTELTE NAVIER-STOKES GLEICHUNGEN
Um Navier-Stokes Gleichungen für allgemeine Problemstellungen lösbar zu machen, muss die Gleichung in eine Form gebracht werden, in welcher eine numerische Lösung mit vertretbarem Aufwand zu finden ist.
Durch die Aufteilung der Strömungsparameter ϕ in einen zeitlich gemittelten Durchschnittswerts φ und einen statistisch bestimmten Schwankungswert ϕ‘ taucht in den Gleichungen zwar ein zusätzlicher Term auf, welcher mit Hilfe eines Turbulenzmodells beschrieben werden muss, jedoch können Rechen-Ressourcen eingespart werden, da für ein zufriedenstellendes Ergebnis nicht jede einzelne turbulente Struktur berechnet werden muss. Die Reynoldsche Art der Mittelung erfolgt über einen kleinen Zeitraum T:
iii (x,t)(x)'(x,t)Φ=ϕ+ϕ
1
ii0
1 (x)(x,t)dtT
Φ=⋅ϕ ∫
T
ii0
1'(x,t)'(x,t)dt0T
ϕ=⋅ϕ≡ ∫
(5.5)
(5.6)
(5.7)

28
Teilt den Druck und die Geschwindigkeit in (5.4) gemäß (5.5) auf, erhält man die Reynolds-gemittelten Navier-Stokes Gleichungen:
Rijijii
jMijijj
UU PUStxxxx
∂τ∂τ∂∂ ∂ρ+=−+++ ∂∂∂∂∂ (5.8)
Wobei Ui und Uj die gemittelten Geschwindigkeitskomponenten in xi und xj Richtungen sind. Für τRij gilt:
111213Rijij212223
313233
UUUUUUUUUUUUUU
UUUUUU
τ=−ρ⋅=ρ (5.9)
Rijτ ist der Reynoldsspannungstensor, welcher in die RANS-Gleichung mit neuem Term und
neuen Variablen eingeht. Das führt allerdings zu einer Unterbestimmung des Gleichungssystems. Weitere Beziehungen können durch Annahmen für die Komponenten Reynoldschen Spannungstensors aufgestellt werden. Die Zusammenfassung dieser Annahmen bildet das Turbulenzmodell. StarCCM+ verwendet zwei verschiedene Klassen von Turbulenzmodellen: Wirbelviskositätsmodelle und Reynoldsspannungstransport-Modelle. Da in der vorliegenden Arbeit Wirbelviskositätsmodelle verwendet wurden, wird sich ausschließlich auf diese Beschreibung konzentriert.
Mit Hilfe der Hypothese von Boussinesq werden die Reynoldsspannungnen in Analogie zu den durch molekulare Viskosität hervorgerufenen Spannungen behandelt.
jikijtijij
jik
UUU 22UUkxx3x3
∂∂∂ρ⋅=−µ+−δ+ρδ∂∂∂ (5.10)
Die turbulente Wirbelviskosität tµ beschreit die Erhöhung der Viskosität durch turbulente
Schwankungen und lässt sich mit einem turbulenten Längenmaß Lt sowie einem turbulenten Geschwindigkeitsmaß Ut darstellen. Zur Bestimmung des Längen- und Geschwindigkeitsmaßes werden unter anderem Wirbelviskositätsmodelle mit zwei unabhängigen Turbulenzvariablen herangezogen. (17 S. 292)
Die bekanntesten Vertreter der Zweigleichungsmodelle sind die k-ε- und k-ω-Turbulenzmodelle. (18)

29
k-ε-TURBULENZMODELL
Das k-ε-Turbulenzmodell beschreibt mit zwei partiellen Differentialgleichungen die Entwicklung der turbulenten kinetischen Energie k und der isotropen Dissipationsrate ξ. Somit gilt für die turbulente Wirbelviskosität:
2
tkCµµ=ρξ (5.11)
Die Transportgleichungen lauten:
j tijt
jjjijjkj
UUkkUkkUtxxxxxxx
∂ µ∂∂∂∂∂∂∂ρ+ρ=µ++µ+−ρξ ∂∂∂∂∂∂∂σ∂ (5.12)
und
2j tii
j1t2jjjijjj
UUU kUCCtxkxxxxxxk εε
ε
∂ µ∂∂∂ε∂ξξ∂∂ξ∂ξρ+ρ=µ++µ−−ρ ∂∂∂∂∂∂∂σ∂
In den Gleichungen sind modellspezifische, empirische Koeffizienten Cμ, Cε, Cε1, Cε2, σk, σε integriert. Diese werden in Experimenten ermittelt und können in der Literatur nachgeschlagen werden (18).
k-ω-TURBULENZMODELL
Ein weiteres Zweigleichungsmodell ist das k-ω-Turbulenzmodell, welches eine Transportgleichung für k und eine Transportgleichung für die charakteristische Frequenz ω der energiedissipierenden Wirbel löst:
1Ckµ
ξω=
(5.14)
Die Transportgleichung für k lautet:
( )jiijtt
jjjijj
UUUkkk UCktxxxxxx
∗∗µ
∂∂∂∂∂∂∂ρ+ρ=ρµ+−βρω+µ+σµ ∂∂∂∂∂∂∂ (5.15)
Die Transportgleichung für ω kann geschrieben werden als:
(5.13)
30
( )j 2iijtt
jjjijj
UUUUCtxkxxxxx µ
∂∂∂∂ω∂ωω∂∂ωρ+ρ=αρµ+−βρω+µ+σµ ∂∂∂∂∂∂∂ (5.16)
Das k-ω-Modell bietet Vorteile in wandnahen Bereichen. Das k-ε-Modell liefert bessere Ergebnisse in wandferner Strömung. In der hier durchgeführten Simulation wird die Kombination beider beider Turbulenzmodelle in Form des von Menter entwickelten SST-Turbulenzmodells verwendet. (18)
DISKRETISIERUNG
Nach der Auswahl des geeigneten mathematischen Modells, das die Differentialgleichungen zur Beschreibung der Fluidströmung definiert, muss ein numerisches Verfahren zur Lösung der Gleichungen angewendet werden. In dieser Arbeit wird die Finite-Volumen-Methode (FVM) genutzt, um die Terme lösen zu können. Die Finite Volumen Methode bedingt die Formulierung der RANS-Gleichungen und der Kontinuitätsgleichungen in integraler Form. Folglich sind 5-12 bis 5-16 über ein Kontrollvolumen zu integrieren, siehe (17 S. 36).
5.3. GRÜNDE ZUR WAHL VON STARCCM+
StarCCM+ ist ein kommerzielles Softwarepacket zur Simulation verschiedener Probleme im Gebiet der numerischen Strömungssimulation. Es wurde von dem CFD-fokussierten CAE Provider CD-Adapco entwickelt. Die Software ist erstmalig 2004 als ein prozessorientiertes CAE All-In-One-Paket auf den Markt gebracht worden. Die Softwarelösung bietet den kompletten CFD-Prozess in einer Umgebung an. Aufgrund seiner anwenderorientierten Programmierung zeichnet sich das Programm durch einen hohen Bedienkomfort per grafischer Oberfläche aus.
Da sich die Software im maritimen Sektor mit Anwendungen im Yachtdesign, der Meerestechnik und Propulsionsorganoptimierung einen Namen gemacht hat, erscheint sie als eine gute Wahl. Die großen Freiheiten eines Open-Source Codes, wie OpenFoam, bieten bei den hier behandelten Problemen noch keine Vorteile. Somit kann die Zeit für den erheblichen Einarbeitungsaufwand in eine ergebnisorientierte Untersuchung fließen.

31
5.4. VALIDIERUNG DER CFD SIMULATION
Zur Validierung der CFD-Ergebnisse wird ein NACA 0012 Profil verwendet, da es sehr ähnliche Umströmungseigenschaften wie die beiden in der Konstruktion verwendeten Profile (NACA 0015, 0010) besitzt. Das NACA 0012 Profil ist das meist getestete Auftriebsprofil. Es wurde in vielen Windkanälen innerhalb der letzten 70 Jahre weltweit untersucht. Für einen großen Bereich von Mach Zahlen, Reynolds Zahlen und Anströmwinkeln wurde eine Vielzahl von Ergebnissen veröffentlicht (19). Die NASA hat eine Webseite eingerichtet, auf der sie RANSE-Turbolenzmodelle dokumentiert und Benchmark-Tests darstellt (Turbulence Modeling Resource4). Ziel der Seite ist unter anderem, Nutzern von CFD-Codes die Möglichkeit zu geben, die richtige Implementierung ihrer Modelle zu verifizieren. Im Folgenden wird eine Validierung anhand der veröffentlichten Daten des 2D NACA 0012 Airfoil Validation Case (20) durchgeführt. Dabei werden nicht das Gitter und die Boundary-Definition der NASA-Simulationen verwendet, sondern ein Gitter, das der Diskretisierung der 2D und 3D Simulationen des Flügels in dieser Arbeit entspricht.
5.4.1. GEOMETRIE UND SETUP
Wie in Abschnitt (2.1. NACA Profile) erläutert, sind NACA-Profile der 4 Digid Series mit einer Formel beschreibbar. Auf Grundlage dieser Formulierung wird mit Hilfe des NACA 4 Digits Series Profile Generator (21) die gewünschte Geometrie in Form von Punktdaten erstellt. Diese werden in Solid Works zu einer Kurve zusammengefügt und mittels Austragung um einen Meter zu einem 3D CAD-Objekt umgewandelt. Die Abströmkante wurde gebrochen, da scharfkantige Geometrien schlecht vernetzt werden können. Die Datei wird im Parasolid-Format gespeichert, um in einem weiteren Schritt von StarCCM+ eingelesen zu werden.
Da die Initialvernetzung der Geometrie des StarCCM+ Importeurs nicht ausreichend akkurat ist, muss vor der Weiterverwendung der Geometrie ein Surface-Remesh mit der Option project to CAD durchgeführt werden. Die Parameter für die Netzverfeinerung können in StarCCM+ festgelegt werden und sind im folgenden Abschnitt beschrieben.
Nach dem Geometrie-Import wird das Profil auf eine Sehenlänge von 1,3 m skaliert. Die Domain, in der sich die Strömung um das 0012 Profil ausbilden soll, wird durch eine Box mit Kantenlägen von 200 x 175 x 1 Metern definiert. Das Volumen des NACA 0012 Profils wird mittels Boolescher Operation von dem der Box subtrahiert. Als Ergebnis erhält man einen Raum, welcher der Box gleicht, allerdings mit einer Aussparung anstelle des Profils. In einem weiteren Schritt wird definiert, welchen Wänden der Domain bestimmte physikalische Bedeutungen zugeteilt werden. So müssen neben IN- und OUTLET, WALLS und SYMMETRIE PLANES definiert werden. Diese Bereiche werden Boundaries genannt. In dieser Arbeit werden VELOCITY INLETS und PRESSURE OUTLETS benutzt. Das heißt, die Luft strömt mit definierter Geschwindigkeit normal zur
4 http://turbmodels.larc.nasa.gov/

32
Oberfläche des INLETS in die Domain. Am PRESSURE OUTLET kann die Luft aus der Domain austreten, ohne sich anzustauen – der Druckgradient ist Null. Die WALLS, welche als verbleibende Begrenzung der Domain fungieren, haben im Gegensatz zur WALL der Profiloberfläche keine Haftbedingung. Das Profil ist 50 Profillängen vom INLET und 100 Profillängen vom OUTLET sowie 70 Profillängen von den WALLS entfernt.
DISKRETISIERUNG
Da StarCCM+ hauptsächlich für 3D Simulationen geeignet ist, erstellt die Software mit dem automatischen Gittergenerator immer ein 3D Gitter. Die Eigenschaften des Gitters können über Parameter festgelegt werden. Zentrale Bedeutung erfährt der Parameter Base Size – eine Bezugsgröße, an der sich alle anderen Parameter orientieren. So kann global, relativ zur Base Size, die maximale Zellgröße für die weniger interessanten Regionen der Domain definiert werden. In gleicher Weise wird durch die minimale Zellgröße der Zellabstand auf den Krümmungsradien sowie die Wachstumsraten der Zellen definiert. Da die Domain in verschiedene Bereiche (die Boundaries) eingeteilt wurde, können auch lokal, d.h. für jede Boundary einzeln, Gitterparameter definiert werden. Die lokalen Parameter besitzen eine höhere Wertigkeit und ersetzen die global gewählten Parameter in den speziellen Regionen. Für besonders interessante Regionen, wie die oberflächennahen Bereiche von umströmten Körpern, ist es ratsam, grenzschichtauflösende Prism Layer zu generieren, da in diesen Regionen ein großer Geschwindigkeits- und Druckgradient zu erwarten ist. Bei Aktivierung der Option muss ausgewählt werden, aus wie vielen Schichten das Prism Layer besteht, wie groß die Absolutdicke ist und mit welchem Wachstumsfaktor sich Schichtdicken nach außen hin vergrößern. Bei der Validierung besteht das Prism Layer aus 5 Schichten, die insgesamt 8 mm Dick sind und einen Wachstumsfaktor von 1,24 haben.
StarCCM+ gibt eine weitere Möglichkeit, das Gitter anzupassen: Auch entfernt von lokal definierten Boundaries können sogenannte Volume Controls erstellt werden. Innerhalb dieser frei platzierbaren Volumenkörper kann nach Belieben eine Zellverfeinerung bzw. -vergröberung vorgenommen werden. Volume Controls finden Anwendung in den Nachstrombereichen. Nach der Definition bzw. Anpassung aller Parameter kann der Mesher – der automatische Gittergenerator - gestartet werden. Dieser Vorgang muss wiederholt werden, bis ein zufriedenstellendes Ergebnis erreicht ist. Ein zweidimensionales Gitter entsteht im Nachhinein durch einen Schnitt des 3D Gitters in der Z=Null-Ebene des globalen Koordinatensystems (KS).
In den folgenden Abbildungen sind die Gesamtdomain (Abb. 5-1), die Verfeinerung des Nachstromfelds (Abb. 5-2) und die wandnahen Bereiche (Abb. 5-3, 5-4) dargestellt. Die schwarzen Regionen sind sehr fein aufgelöste Berreiche, die nur bei größeren Zoom-Faktoren als strukturiertes Gitter erkennbar sind.

33
Abbildung 5-1 Domain, INLET links, OUTLET rechts, WALL oben und unten
Abbildung 5-2 Nachstromfeldverfeinerung in Strömungsrichtung

34
Abbildung 5-3 wandnaher Bereich, Profilnase
Abbildung 5-4 Abströmkante mit definierter 2 Zellen Stärke
PHYSIKALISCHE PARAMETER
Die Anströmgeschwindigkeit beträgt 72,8 m/s. Der Wert ist zwar höher als die Windgeschwindigkeiten, die der Prototyp erfahren wird, allerdings muss auf die Reynoldszahl Ähnlichkeit zu den NASA-Simulationen geachtet werden. Die Reynoldszahl beträgt 5∙106 bei einer Profillänge von Lchar = 1,3 m und einer dynamischen Viskosität von ν = 1,85508∙10-5 Pa∙s. Die Rechnung erfolgt inkompressibel. Das Shear Stress Turbulence Model (SST) wird verwendet, die Optionen Steady, Fully Tubulent und Two-Layer All y+ Wall Treatment sind aktiviert. Die Turbulence Intensity beträgt 0,01. Coupled Flow und die 2nd-Order Diskretisierungsmethode werden angewendet. Aufgrund der Inkompressibilität ist die Dichte der Luft konstant und beträgt 1,1815 kg/m3.
Zur Abschätzung der Grenzschichtdicke wurde nach Heinrich Blasius die Grenzschichtdicke auf einer ebenen Platte bei gleicher Anströmgeschwindigkeit und gleicher charakteristischer Länge (1,3 m = Sehnenläge Profil) berechnet (22):

35
charGS
5LRe⋅
δ= (5.17)
Da es sich um eine turbulente Grenzschicht handelt und Blasius‘ Formel für laminare Schichten gilt, wird die Schichtdicke größer sein. Laut der Formel werden 3 mm Schichtdicke angenommen, welche in der feinen Auflösung des Prism Layers von 8 mm Stärke liegt.
Neben den wichtigsten hier genannten Einstellungen ist das Komplette CFD-Setup im Ordner CFDSetup unter „2DVal_NACA0012_0008_Report“ bzw. in „2DVal_NACA0012_0009_Report“ auf der beigefügten CD einsehbar.
Zum Vergleich werden die Daten von C. L. Ladson aus seiner Arbeit „Effects of Independent Variation of Mach and Reynolds Numbers on the Low-Speed Aerodynamic Characteristics of the NACA 0012 Airfoil Section“ herangezogen (23). Ladson ließ mit Hilfe von Stolperdraht – eine voll-turbulente Strömung das NACA 0012 Profil in einem Windkanal bei einer Reynoldszahl von 6∙106 umströmen.
Die CFD Vergleichsdaten sind Ergebnisse des CFL3D-Codes des Langley Research Centers. Die dazugehörigen Geometrie- und Gittereinstellungen sind detailliert auf der Website Turbulence Modeling Resource beschrieben (20).
5.4.2. SIMULATION
Exemplarisch wird die Strömungssimulation für die Anstellwinkel 0°, 10° und 15° durchgeführt. Dabei werden der Druckbeiwert cp, der Auftriebsbeiwert cl, der Widerstandsbeiwert cd und der Reibungsbeiwert cf ermittelt. Nach verschieden Konfigurationsveränderungen sind die eingenen Berechnungen „FLO SST 0008“ und „FLO SST 0009“ als am besten befunden worden. Diese werden mit den Windkanalversuchen „Ladson_80grid“ und mit dem numerischen Testfall „NASA SST (CFL3D)“ verglichen.
Abbildung 5-5 zeigt die Geschwindigkeitsverteilung im Nahbereich des Profils, bei einem Anstellwinkel von 10°. Gut erkennbar sind der Staupunkt unterhalb der Profilnase, der Bereich des Druckminimums oberhalb der Profilnase, in dem die Strömung auf mehr als das Doppelte der ungestörten Anströmungsgeschwindigkeit beschleunigt wird. Die Geschwindigkeits-verringerung im wandnahen Bereich auf Saug- und Druckseite und das Nachstromfeld hinter dem Profil sind ebenfalls ersichtlich.

36
Abbildung 5-5 Geschwindigkeitsverteilung am NACA 0012, AOA 10°
5.4.3. ERGEBNISSE UND SCHLUSSFOLGERUNG
Bei der Auswertung der numerischen Strömungsergebnisse fällt die sehr gute Übereinstimmung der Liftkoeffizienten von Windkanaltests, NASA Simulationen und den hier beschriebenen Simulationen auf (Abb. 5-6). Im Gegensatz dazu sind Unterschiede beim Vergleich der Dragkoeffizienten festzustellen (Abb. 5-7). Die Tendenz des von der NASA getesteten Codes CFL3D, der zur Überschätzung des Dragkoeffizienten bezüglich der Windkanaltests neigt, ist bei den hier beschriebenen Simulationseinstellungen stärker ausgeprägt.
Abbildung 5-6 Liftkoeffizienten Vergleich von Windkanalversuchen und CFD Simulationen
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
0 2 4 6 8 10 12 14 16
Lift
Koe
ffizi
ent
AOA [deg]
Lift Verlauf NACA0012 versch. Codes
FLO SST (STAR) 0009
FLO SST (STAR) 0008
NASA SST (CFL3D)
Ladson (wind tunnel)

37
Abbildung 5-7 Dragkoefizientenvergleich von Windkanalversuchen und CFD Simulationen
Abbildung 5-8 visualisiert den Vergleich der Codes mittels Balkendiagram. Dabei ist das Ergebnis des NASA CFL3D Codes mit 1 normiert, relativ dazu sind die Ergebnisse der anderen Methoden aufgetragen. Bei 0° Auslenkung ist das Drag-Ergebnis der verschiedenen Methoden fast identisch. Bei 10° Anstellwinkel wird der Drag zu 16% (FLO SST (STAR) 0008) bzw. zu 24% (FLO SST (STAR) 0009) überschätzt. Im Ablösebereich von 15° ist eine Differenz von 16% bzw. 26% detektierbar.
Abbildung 5-8 CFD Code - Vergleich
Wenn man die Verteilung des Druckbeiwertes auf der Profiloberfläche grafisch vergleicht, ist eine gute Übereinstimmung unter den CFD Simulationen erkennbar. Bei den großen Anstellwinkeln ist auf der Druckseite die Position des Staupunktes leicht verschieden. Der Staupunkt dieser Simulationen liegt etwas vor dem der NASA-Simulation. Desweiteren wird im vorderen Bereich der Saugseite, besonders zwischen 0.05 und 0.2 relativer Profillänge, der Unterdruck etwas höher errechnet als bei der NASA-Simulation.
0.005
0.010
0.015
0.020
0.025
0.030
0 2 4 6 8 10 12 14 16
Drag
Koe
ffizi
ent
AOA [deg]
Drag Verlauf NACA 0012 versch. Codes
FLO SST (STAR) 0009
FLO SST (STAR) 0008
NASA SST (CFL3D)
Ladson (wind tunnel)
0 0.2 0.4 0.6 0.8
1 1.2 1.4
Cl (alpha=10)
Cl (alpha=15)
Cd (alpha=0)
Cd (alpha=10)
Cd (alpha=15)
Ähnl
ichk
eit
Code Vergleich
FLO SST (STAR) 0009
FLO SST (STAR) 0008
NASA SST (CFL3D)
Ladson (wind tunnel)

38
Abbildung 5-9 Druckbeiwerte NACA 0012 bei 0°, 10° und 15° AOA
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Druc
kbei
wer
t Cp
Profilposition x/c
NACA0012 Cp 0°
FLO SST (STAR) 0008 FLO SST (STAR) 0009 NASA SST (CFL3)
-6.0
-5.0
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Druc
kbei
wer
t Cp
Profilposition x/c
NACA 0012 Cp 10°
FLO SST 0008 FLO SST 0009 NASA SST (CFL3)
-12.0
-10.0
-8.0
-6.0
-4.0
-2.0
0.0
2.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Druc
kbei
wer
t Cp
Profilposition x/c
NACA 0012 Cp 15°
FLO SST 0008 FLO SST 0009 NASA SST (CFL3D)

39
Anhand der Ergebnisse der CFD-Validierung am Beispiel des NACA 0012 Profils wird deutlich, dass der Auftrieb eines Profils im 2D Fall sehr genau bestimmt werden kann. Auch die Druckverteilung auf der Oberfläche kann sehr gut modelliert werden. Weniger gute Ergebnisse liefert der Vergleich der Widerstandsbeiwerte von CFD-Simulation und Windkanaltests. Die CFD-Simulationen überschätzen den Widerstandsbeiwert.
Für die weiteren Untersuchungen des Flügels wird das Setup der Simulation FLO SST (STAR) 0008 verwendet, da dieses Ergebnisse liefert, die den Vergleichsuntersuchungen am nächsten kommen.

40
5.5. 2D UNTERSUCHUNG DES PROTOTYPS
Der Flügel besteht im horizontal Schnitt aus 3 Profilen, die einzeln angestellt werden können. Zur Analyse der Strömungseigenschaften des Flügels bei verschiedenen Windstärken ist es notwendig, die Anstellwinkel der einzelnen Elemente zu variieren. Ziel ist es, die optimalen Anstellwinkel des Flügelprototyps in Abhängigkeit von Windgeschwindigkeit und Kurs angeben zu können.
Wegen der Vielzahl von Winkelkombinationsmöglichkeiten müssen Vorüberlegungen getroffen werden, so dass wenig Erfolg versprechende Variationen außer Acht gelassen werden können. In einer ersten Simulationsserie wurden die drei Elemente nicht zueinander verstellt sondern als verbundenes Profil betrachtet. Bei diesem Setup ist deutlich zu sehen, dass im Bereich zwischen 12° und 14° bei Re = 4.1∙105 die Strömung vollständig abreißt (Abb. 5-10).
Abbildung 5-10 Ablösung zwischen 12° und 14° Anstellwinkel
In der Simulation ist der Strömungskörper ortsfest. Die Anströmung ist die vektorielle Summe aus Fahrtwind und Wind, also der scheinbare Wind. Da bei hohen Geschwindigkeiten, bzw. bei Geschwindigkeiten größer der wahren Windgeschwindigkeit, der Fahrtwind einen entscheidenden Anteil am scheinbaren Wind hat, wird der Flügel auch bei Raum-Schot-Kurs nicht sehr weit ausgestellt (siehe Kap. 2.3.). Allerdings wird bei Raum-Schot-Kursen mit geringer Fahrtgeschwindigkeit, z. B. direkt nach Runden der Luv-Tonne, der Winkel zwischen gewünschtem Kurs und scheinbarem Wind groß. Dieses Szenario erfordert eine weite Ausstellung des Flügels. Der Segler kann den Flügel aber nur bis zum Anschlag an die Wanten dem Wind nachführen, um die Strömung zum Anliegen zu bringen. Dieser ca. 50° betragende Winkel wird in manchen Situationen jedoch nicht ausreichen.
Mit Hilfe der Flap und dem hinteren Element soll der mögliche effektive Anströmwinkel des Profils vergrößert werden und die Einschränkung der Bewegungsfreiheit durch die Wanten wett gemacht werden. Daher ist die Umströmung der Profilkombination auch für überkritische Anströmwinkel von mehr als 12° berechnet worden.
Getestet wurden im Speziellen 6 Hauptanstellwinkel α: 6°, 8°, 10°, 12°, 14°, 16° sowie 11 Anstellwinkel des hinteren Elements γ von 0° bis 20° in zweier Schritten. Der Flapwinkel wurde zwischen 0° und γ variiert. Insgesamt ergeben sich 6 x 66 Simulationen pro Anströmgeschwindigkeit. Bei den drei Anströmgeschwindigkeiten von 4.5 m/s, 8 m/s und 16 m/s sind 1188 Simulationen notwendig.

41
Um Rechenzeit zu sparen, bleibt diese Simulationsserie auf den 2-dimensionalen Raum beschränkt.
5.5.1. GEOMETRIE UND SETUP
Die Geometrie des drei-elementigen Flügelprofils entsteht durch den horizontalen Schnitt des Flügels auf 4 m Höhe. Das Design des Flügels variiert mit der Höhe. Auf 4 m beträgt die Sehnenlänge der 3 Profile am Stück 1,70 m. Die Profilform der Elemente bleibt über die gesamte Höhe ein NACA 0015 bzw. NACA 0010, allerdings ändern sich die Sehnenlängen und deren Anteil an der gesamt Profillänge des Flügels. Daher sind die Ergebnisse auf den speziellen Flügelschnitt beschränkt und nicht auf andere Höhen übertragbar.
Wie beim realen Prototyp, sind die drei Profilelemente durch Drehung um 2 Rotationsachsen einstellbar. So können alle drei Elemente um das ortsfeste Koordinatensystem (KS) „Mastfuß“ gedreht werden. Dessen Ursprung liegt im Schnittpunkt der Achse von Mastfuß und Wanten-Anschlagspunkt mit der horizontalen 4 m Ebene. Sowohl die Flap als auch das hintere Element können zusätzlich um die Z-Achse des mitdrehenden KS „Lager“ rotieren. Der Koordinatenursprung liegt 446 mm hinter dem Ursprung des KS „Mastfuß“ auf dessen X-Achse (Abb. 3-2).
Wie im Kapitel 3.1 dargestellt, sind die drei Winkel: Hauptwinkel α, Flapwinkel β und der Winkel des hinteren Elementes γ individuell eingestelltbar. Wichtig für das weitere Verständnis ist, dass der Flapwinkel β und der Winkel des hinteren Elementes γ relativ zum Hauptelement betrachtet werden. Das heißt:
Anstellwinkel der Flap zur ungestörten Anströmung = α+ β
Anstellwinkel des hinteren Elements zur ungestörten Anströmung = α+ γ
Zwischen der Profilhinterkante der Flap und dem hinteren Element ist ein Spalt von 2-3 mm bei nicht ausgelenkter Profilstellung vorhanden. In Abhängigkeit der Winkelkonfiguration kann dieser Slot unterschiedlich groß werden. Wie sich im Folgenden zeigen wird, hat der Slot einen entscheidenden Einfluss auf die Gesamtumströmung des Profils.
In Anlehnung an das Setup aus den Validierungsrechnungen für das NACA 0012 Profil werden die Einstellungen für das Gitter, die physikalischen Parameter und den Solver angepasst bzw. übernommen. Die genauen Einstellungen sind im Anhang nachzuvollziehen.

42
5.5.2. DURCHFÜHRUNG MIT HILFE EINES MAKROS
Wie einleitend erwähnt, bedingt die Untersuchung der verschiedenen Anstellwinkel eine Vielzahl von Simulationen. Nach intensiver Auseinandersetzung mit der bestmöglichen Einstellung des Gittergenerators, des Solvers und des Postprozessors, sollte eine automatisierte Simulationsdurchführung zu aussagekräftigen Ergebnissen in vertretbarer Zeit und bei vertretbarem Aufwand führen. StarCCM+ besitzt die Option, mittels JAVA5 Makrobefehle zu programmieren. Somit kann anstelle von Einzelanweisungen eine Folge von Anweisungen per Codeeingabe oder Mausklick mit nur einem Aufruf ausgeführt werden. Im Zusammenspiel mit der sogenannten Batch- oder Stapelverarbeitung können ohne Interaktion zwischen Benutzer und Programm beliebig viele, nach einem Muster veränderte Simulationen durchgerechnet werden. Dabei wird der „Risikofaktor Mensch“, der Eingabefehler macht, ausgeschlossen. Die einzige Geschwindigkeitsbegrenzung ist die Hardware des Rechnerclusters. Das für diese Arbeit verwendete Makro ist mit Einverständnis der Firma IBMV nach Vorlagen eines Markos zur automatisierten Berechnung von Schiffs-Rudern angepasst worden. Die wichtigsten Schritte, die mit Hilfe des Makro-Tools ausgeführt wurden, sind im Folgenden beschrieben. Eine Besonderheit von StarCCM+ besteht darin, dass jede Art von Simulation grundsätzlich 3 dimensional konzipiert wird. Für 2D Rechnungen muss der Berechnungsraum geschnitten werden, nachdem ein Volumennetz zur Diskreditierung der Domain erstellt wurde. Die Schnittebene bildet die 2D Domain. Dieser umständliche Weg erfordert ein komplizierteres Makro: Die Grundlage der Berechnung bildet eine Basisdatei (z.B. Mod8.sim, für die α = 8° Serie), in welcher die drei Flügelelemente vorerst ohne Anstellung, also in Strömungsrichtung, im Raum relativ zum ortsfesten KS Mastfuß stehen. Die Oberflächendefinition der Flügelgeometrie ist aus SolidWorks importiert und entstand durch die Extrusion des Flügelprofilschnitts auf 4 m Höhe normal zur horizontal Ebene um 1 m (siehe Abb. 5-11, links). Die Domain, welche die 1,7 m langen Profile umschließt, erstreckt sich 15 m Stromaufwärts, 17 m Querab und 25 m stromabwärts bei einer Höhe von 20 cm. Für den ersten Stritt des Makros werden in der Datei RotateMacro_Execute.java alle gewünschten Winkelkonfigurationen in der Variable angles= {{8, 0, 0}, {8, 0, 2}, …, {8, 20, 20}} definiert. Dabei steht die erste Zahl in der geschweiften Klammer für den Hauptanstellwinkel α , die zweite für den Flapwinkel β und die dritte für den Anstellwinkel des hinteren Elements γ. Durch Ausführen des Makros RotateMacro_Rotate.java werden zuerst das hintere Element und die Flap entsprechend der Definition um die Z-Achse des lokalen KS „Lager“ gedreht. Im Anschluss werden alle drei Elemente um den Betrag des Hauptwinkels α um die Z-Achse des KS Mastfuß gedreht. Um eine berechenbare Domain zu erhalten, müssen verschiedene Boolesche Operationen durchgeführt werden: Die beiden Volumenkörper des Hauptelementes und der
5 Objekt orientierte Programmiersprache von Sun Microsystems, Oracle Corporation

43
Flap werden nach der Drehung vereinigt und dann mit dem hinteren Element von der Domain subtrahiert. Das Ergebnis der Operationen ist auf der rechte Seite der Abbildung 5-11 zu sehen. Nachdem das übriggebliebene Volumen der Domain mit einem Prism Layer Mesh für wandnahe und für wandferne Bereiche mit einem Polyhedral Mesh vernetzt wurde, wird die gesamte Domain in der Z-Ebene geschnitten und somit eine 2D Domain erzeugt. Das pinke Koordinatensystem ist das KS Mastfuß, die Anströmung kommt aus der x-Richtung.
Abbildung 5-11 Automatische Geometrieerstellung mittel Makros
Abbildung 5-12 Ergebnis der automatischen Vernetzung des Flügelschnitts
Im nächsten Schritt wird die numerische Simulation mit Hilfe des Makros RotateMacro_RunSimulation.java gestartet. Durch zuvor definierte Abbruchkriterien wird die Simulation gestoppt, wenn nach ca. 3000 Iterationen eine quasistationäre Lösung erreicht ist bzw. die Strömung bei zu hohen Anstömwinkeln abreist und instationäre Wirbelsysteme bildet (siehe CFD Setup auf der CD).

44
Abbildung 5-13 Beispielhafte Residuendarstellung einer 2D CFD Simulation
Das Makro RotateMacro_ExtractResults.java erstellt aus jeder der fertig berechneten Simulation Grafiken, mit deren Hilfe eine schnelle Begutachtung der Ergebnisse möglich ist. Pro Simulation werden 5 Grafiken gespeichert: *Residuals.png (Abb. 5-13), *ScalarScene1.png (Abb. 5-14), *Pressure_Global.png, *Lift.png und *Drag.png (Abb. 5-15). * steht für ein spezifisches Präfix, z.B. Mod8_8.0_4.0_12.0, welches hier bedeutet: Setup Modifikation Nr. 8, 8° Hauptanstellwinel α, 4° Flapwinkel β und 12° Anstellwinkel des hinteren Elements γ.
Die Residuals (Deutsch: Residuen) zeigen, wie groß der Unterschied einer berechneten Größe von einer Iteration zur nächsten ist. Sie können als Reststörung aufgefasst werden. Ist der Betrag des Residuums einer repräsentativen Größe, z.B. der Continuity6, besonders kleint, bedeutet das, dass die Simulation konvergiert. Besonders interessante Größen wie der Auftrieb, bzw. der Widerstand eines Profils, bleiben dann konstant und können für die Auswertung genutzt werden (siehe Abb. 5-13).
Falls die Residuen oszillieren, müssen entweder mehr Iterationen durchlaufen werden oder die Netz- bzw. Solvereinstellungen sind zu verändern. Bei nicht-stationären Untersuchungen kann sich keine Lösungskonvergenz einstellen. In diesem Fall muss transient gerechnet werden, und durchschnittliche Belastungen von Bauteilen oder Belastungsspitzen müssen im Nachhinein ausgewertet werden.
6 Ein Residuen Monitor der den globalen Wert der Kontinuitätsgleichung aufzeichnet

45
Abbildung 5-14 Durckverteilung und Strömungcharakteristik eines Flügelschnittes
Die Grafik ScalarScene1 (Abb. 5-14) visualisiert mittels Flächenfärbung der Domain die Druckverteilung in der Ebene um die Flügelprofile. In der farbcodierten Darstellung wird der Farbe Blau das Druckminimum zugewiesen, welches sich meistens an dem oberen Nasenteil des Hauptprofils befindet. Der Farbe Rot wird das Druckmaximum (meistens im Staupunkt) zugewiesen. Der Druckbereich zwischen Minimum und Maximum wird durch das kontinuierliche Farbspektrum dargestellt.
Des Weiteren zeigen schwarze Vektoren in gleichbleibendem Abstand, Strömungsrichtung und Strömungsgeschwindigkeit in ihrem jeweiligen Ursprungspunkt an.
Für einen Vergleich mehrerer Simulationsergebnisse mit unterschiedlichen Anstellwinkeln und unterschiedlichen Extremwerten, wird eine weitere Visualisierungsgrafik erstellt, welche pro Anströmgeschwindigkeit immer identische Druckmaximal und -minimalwerte hat (*Global_Pressure.png). Diese macht visuelle Vergleiche und eine Präsentation in Form einer Slide Show möglich, welche auf der beigefügten CD gespeichert ist.

46
Abbildung 5-15 Lift- und Dragverlauf über die Simulationszeit
Anhand der Grafiken Lift und Drag ist leicht erkennbar, ab wann der Kraftverlauf über die Iterationszahl konstant bleibt und somit einen repräsentativen Wert für die Auswertung der spezifischen Auftriebs- bzw. Widerstandsbeiwerte darstellt. Die Berechnung des Auftriebs und des Widerstands der 2D Profile erfolgt unter der Annahme eines Flügelelements von 1 m Spannweite. Unterschieden wird zwischen den Widerstandskräften des Hauptelements zusammen mit der Flap und dem hinteren Element (hier Third genannt). Für eine quantitative Auswertung der Tests erstellt das Makro RotateMarco_ExtractResults.java neben den Grafiken eine durch Trennzeichen organisierte Textdatei im .csv – Format. In dieser befinden sich die Auftriebs und Widerstandskräfte der einzelnen Flügelelemente für jedes Testsetup. Zur Auswertung können die Dateien z.B. mit Microsoft-Excel importiert werden, somit sind Trends mittels Graphen anschaulich zu verdeutlichen.
5.5.3. ERGEBNIS UND AUSWERTUNG
Die erhaltende Datenmenge ist sehr groß und auf den ersten Blick unübersichtlich. Mit Hilfe der Slide Show können die Resultate aussagekräftig und illustrativ dargestellt werden (siehe CD). Die Auswirkungen von Parametervariationen, sind sofort erkennbar. Es fallen erste Besonderheiten des Flügelrigg-Prototypens auf:
• Das hintere Element kann bei sehr großen Anstellwinkeln relativ zur ungestörten Anströmung arbeiten, ohne einen Strömungsabriss zu erfahren.
• Mit Hilfe der Flap sind die Strömungsphänomene, die aufgrund des Slots zwischen Hauptelement und hinterem Element auftreten, steuerbar.
Im Folgenden werden ausgewählte Momentaufnahmen der Test-Serie Modifikation 10 bei α = konst. = 10° und einem scheinbaren Wind von 8 m/s präsentiert. Sie verdeutlichen die beschriebenen Besonderheiten der Flügelanordnung.

47
Das hintere Element erfährt trotz großem Anstellwinkel von 24° (α+γ) keinen Strömungs-abriss. Die Strömung liegt überall an den Profilen an.
Bei 28° Anstellwinkel des hinteren Elements löst die Strömung auf der Saugseite des hinteren Profils ab. Auch die Strömung auf der Saugseite des Hauptelements verliert an Geschwindigkeit mit zunehmender Sehnenlänge. Es besteht die Gefahr eines kompletten Strömungsabrisses. Im Slot wird die Luft beschleunigt.
Durch leichtes Anstellen der Flap (2°) verkleinert sich der Totwasserbereich in der Abschirmung des hinteren Elements. Die Strömungs-geschwindigkeit auf der Oberseite des Hauptflügelteils erhöht sich etwas.
Bei weiterer Anstellung der Flap (4°) und Verkleinerung des Slots erhöht sich die Strömungsgeschwindigkeit. Die Strömung hat genügend Energie, um an der Saugseite des hinteren Elements anzuliegen. An der Nase des hinteren Elements bildet sich ein Unterdruckbereich, welcher zusätzlichen Lift erzeugt. Durch die lokale Veränderung der Strömungsvorgänge in der Nähe des Slots verändert sich die globale Druckverteilung.
Bei weiterer Verkleinerung des Slot durch stärkere Anstellung der Flap (10°) entsteht ein Totwassergebiet in der Abdeckung der Flap. Die Strömungsgeschwindigkeiten auf den Saugseiten verringern sich. Die Druckmaxima gehen zurück.
Abbildung 5-16 2D CFD α=10° β=0° γ=14°
Abbildung 5-17 2D CFD α=10° β=0° γ=18°
Abbildung 5-18 2D CFD α=10° β=2° γ=18°
Abbildung 5-19 2D CFD α=10° β=4° γ=18°
Abbildung 5-20 2D CFD α=10° β=10° γ=18°

48
Nachdem die zugrundeliegende Wirkungsweise ermittelt wurde, stellt sich die Frage, welche der Winkelkonfigurationen Vorteile gegenüber anderen Flügeleinstellungen haben. Für diese Optimierung reicht eine visuelle Betrachtung der Ergebnisse nicht aus. Die gespeicherten Daten müssen analytisch ausgewertet werden.
Um mit den berechneten Setups herauszufinden, welchen Einfluss die Winkelvariationen an den 3 Elementen auf die erzeugbaren Kräfte haben, wurden Tabellen mit allen relevanten Daten erstellt. Die vollständigen Tabellen sind der beigefügten CD zu entnehmen. Eine Auswahl charakteristischer Ergebnisse zeigt Tabelle 5-1.
Tabelle 5-1 Auszug des Vergleichs unterschiedlicher Winkelkonfigurationen
Die grün markierten Spalten sind CFD-Ergebnisse. Aus diesen ergeben sich die in den farblosen Spalten berechneten Werte. Folgende Formeln liegen der Berechnung zu Grunde:
Die Gesamtkraft des Profilelements (Total Force)
22222=+TDDDF LD (5.18)
Die Kraftwirkungsrichtung bezogen auf die scheinbare Windrichtung (Direction Total Force)
2
2arccos
2
=
+D
TD
LF
πε (5.19)
Die Vortriebskraft in Kursrichtung (Driving Force)
( )2 2cos=−⋅XD TDFAWA Fε (5.20)
Case α[°] β [°] γ [°] AOA 1E [°]
AOA 2E [°]
AOA 3E [°]
Lift Main, Flap [N]
Lift Third [N]
Lift Total [N]
Drag Main, Flap [N]
Drag, Third [N]
Drag Total [N]
Total force [N]
Lift coeff. Drag coeff Lift/Drag Direction Total Force [°]
Driving force in MS direction at 45° AWA [N]
Side force at 45°AWA [N]
Seperation?
_6.0_0.0_0.0 6 0 0 6 6 6 10.69 1.41 12.10 0.01 0.32 0.34 12.10 0.57 0.02 36.01 91.59 8.32 8.79 0_6.0_0.0_2.0 6 0 2 6 6 8 13.19 1.98 15.17 -0.09 0.47 0.38 15.17 0.72 0.02 39.77 91.44 10.46 11.00 0_6.0_2.0_2.0 6 2 2 6 8 8 13.35 1.98 15.33 -0.06 0.44 0.38 15.34 0.73 0.02 40.17 91.43 10.57 11.11 0_6.0_0.0_4.0 6 0 4 6 6 10 15.51 2.67 18.17 -0.22 0.66 0.44 18.18 0.86 0.02 41.60 91.38 12.54 13.16 0_6.0_2.0_4.0 6 2 4 6 8 10 15.79 2.49 18.28 -0.18 0.62 0.44 18.29 0.87 0.02 41.84 91.37 12.62 13.24 0_6.0_4.0_4.0 6 4 4 6 10 10 15.94 2.49 18.42 -0.14 0.58 0.44 18.43 0.87 0.02 42.04 91.36 12.72 13.34 0_6.0_0.0_6.0 6 0 6 6 6 12 17.97 3.61 21.58 -0.42 0.91 0.49 21.59 1.02 0.02 43.77 91.31 14.91 15.61 0_6.0_2.0_6.0 6 2 6 6 8 12 18.15 3.23 21.37 -0.36 0.86 0.50 21.38 1.01 0.02 42.82 91.34 14.76 15.46 0_6.0_4.0_6.0 6 4 6 6 10 12 18.28 2.96 21.24 -0.29 0.80 0.51 21.25 1.01 0.02 42.05 91.36 14.66 15.38 0_6.0_6.0_6.0 6 6 6 6 12 12 18.40 2.93 21.33 -0.24 0.75 0.51 21.34 1.01 0.02 42.03 91.36 14.72 15.44 0_6.0_0.0_8.0 6 0 8 6 6 14 20.35 4.64 24.98 -0.66 1.21 0.55 24.99 1.18 0.03 45.13 91.27 17.27 18.06 0_6.0_2.0_8.0 6 2 8 6 8 14 20.62 4.18 24.80 -0.59 1.16 0.56 24.81 1.18 0.03 44.02 91.30 17.14 17.94 0_6.0_4.0_8.0 6 4 8 6 10 14 20.66 3.71 24.37 -0.50 1.07 0.57 24.38 1.16 0.03 42.41 91.35 16.83 17.64 0_6.0_6.0_8.0 6 6 8 6 12 14 20.60 3.34 23.94 -0.40 0.99 0.59 23.94 1.13 0.03 40.74 91.41 16.51 17.34 0_6.0_8.0_8.0 6 8 8 6 14 14 20.64 3.30 23.94 -0.33 0.93 0.60 23.95 1.13 0.03 39.98 91.43 16.50 17.35 0_6.0_0.0_10.0 6 0 10 6 6 16 22.56 5.70 28.26 -0.93 1.55 0.62 28.27 1.34 0.03 45.42 91.26 19.54 20.42 0

49
Der Auftriebskoeffizient (Lift coeff.)
22
22
12
=⋅⋅
DLD
DWing
L
vAc
ρ (5.21)
Der Widerstandskoeffizient (Drag coeff.)
22
22
12
=⋅⋅
DDD
DWing
DcvAρ
(5.22)
Die Fläche des 1 m langen Flügelelements ergibt sich aus:
Hauptelement 0.78 m2 + Flap 0.23 m2 + hinteres Element 0.75 m2 = 1.76 m2

50
Abbildung 5-21 zeigt die Kraftwirkungsrichtungen und veranschaulicht die physikalischen Zusammenhänge.
Ziel des Seglers auf jedem Kurs ist es, die Vortriebskraft in Kursrichtung FX2D zu maximieren. In Abbildung 5-21 erkennt man, dass FX2D größer wird, je größer der Auftrieb L2D bzw. je kleiner der aerodynamische Widerstand D2D ist. Mit anderen Worten: Das Verhältnis L2D / D2D ist zu maximieren. Gleichzeitig sollten die Absolutwerte der Kräfte so groß wie möglich sein. Die Darstellung der Vortriebskraft in Abhängigkeit der Winkelkonfiguration zeigt Abbildung 5-22.
Jeder Punkt im Graphen symbolisiert die Untersuchung einer Winkelkonfiguration. Auf der Y-Achse ist die jeweils erreichte Vortriebskraft in Kursrichtung FX2D aufgetragen. Die unterschiedlichen Farben stehen für die verschiedenen Hauptanstellwinkel α von 6°, 8°, 10° und 12°.
Abbildung 5-20 Kraftwirkungsrichtungen

51
Der Verlauf einer einzelnen Kurve, z.B. die der 8ter Serie (rot), beschreibt eine modifizierte Treppenfunktion mit „krummen Stufen“. Jeder Kurvensprung auf eine höhere Stufe repräsentiert eine Veränderung des Anstellwinkels des hinteren Elements γ um 2°. Diese stärkere Anstellung des hinteren Elements erhöht die Vortriebskraft. Hervorzuheben ist, dass nur durch Anstellung des hinteren Elements bei gleichbleibendem Hauptanstellwinkel α, ohne Variation der Flap, die Vortriebskraft mehr als verdoppelt werden kann.
Nach jedem sprunghaften Anstieg der Vortriebskraft verändert sich die Steigung der Kurve, im ersten Drittel des Kurvenverlaufes sinkt die Vortriebskraft nach dem Sprung, ab der Hälfte steigt sie nach dem Sprung an. Die Veränderung nach dem Kurvensprung hat ihre Ursache in der Veränderung des Anstellwinkels der Flap bei gleichbleibendem Anstellwinkel des hinteren Elements. Die Flap wird jeweils vom Ausgangszustand β = 0° (Flap zeigt in Richtung des Hauptelements) in Schritten von 2° bis zum Winkel des hinteren Elements β = γ gedreht.
Abbildung 5-21 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 8 m/s AWS
Die in Abbildungen 5-16 bis 5-20 dargestellten Strömungscharakteristiken und deren Bewertungen lassen sich nun mit Hilfe der Abbildung 5-22 mit Kraftwerten untersetzen: Verfolgt man dem Verlauf der grünen α = 10° Kurve erschließt sich, was die Ablösung der Strömung und die Einstellung der Flap bewirken. In Abbildung 5-23 ist der interessante Bereich zwischen Versuchsnummer 28 und 55 vergrößert dargestellt. Die grün unterlegten Winkelkonfigurationen entsprechen denen der Abbildungen 5-16 bis 5-20. Für die Anstellung des hinteren Elements von 18° ist zu erkennen, dass ohne Einwirken der Flap (10_0_18) nur eine geringe Vortriebskraft erzeugt werden kann, da die Strömung in einem großen Bereich abgelöst ist (Abb. 5-17). Bei Anstellung der Flap um 2° (10_2_18) verbessert sich die Performance (Abb. 5-18). Die maximale Vortriebskraft erreicht der Flügel bei Anstellung der Flap auf 4°
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0 10 20 30 40 50 60 70
Vort
riebs
kraf
t in
Kurs
richt
ung
bei 4
5° A
WA
[N]
Versuchsnummer
Vergleich der Krafterzeugung von 2D Flügelschnitten bei 8 m/s AWS
6th Series
8th Series
10th Series
12th Series

52
(10_4_18, Abb. 5-19). Diese Einstellung erzeugt auch eine höhere Vortriebskraft als das Setup 10_0_14 (Abb. 5-16). Bei weiterer Anstellung der Flap fällt der Performancewert ab (10_10_18, Abb. 5-20). Der komplette Strömungsabriss ab Versuchsnummer 60 führt zum Einbruch des Vortriebskraftwertes.
Abbildung 5-22 Ausschnitt aus Abbildung 5-22
Diese Daten wurden für alle Versuche aufgezeichnet und ausgewertet und sind auf der beigefügten CD einsehbar. Im Vergleich der drei untersuchten Windgeschwindigkeiten ist klar erkennbar, dass bei einer schnelleren Umströmung des Profils mehr Vortriebskraft generiert wird (Abb. 5-23).
_10.
0_0.
0_14
.0
_10.
0_2.
0_14
.0
_10.
0_4.
0_14
.0
_10.
0_6.
0_14
.0
_10.
0_8.
0_14
.0
_10.
0_10
.0_1
4.0
_10.
0_12
.0_1
4.0
_10.
0_14
.0_1
4.0
_10.
0_0.
0_16
.0
_10.
0_2.
0_16
.0
_10.
0_4.
0_16
.0
_10.
0_6.
0_16
.0
_10.
0_8.
0_16
.0
_10.
0_10
.0_1
6.0
_10.
0_12
.0_1
6.0
_10.
0_14
.0_1
6.0
_10.
0_0.
0_18
.0
_10.
0_2.
0_18
.0
_10.
0_4.
0_18
.0
_10.
0_10
.0_1
8.0
_10.
0_18
.0_1
8.0
45.00
50.00
55.00
60.00
65.00
70.00
75.00
28 33 38 43 48 53
Vort
riebs
kraf
t in
Kurs
richt
ung
bei 4
5° A
WA
[N]
Versuchsnummer
α = 6°
α = 8°
α = 10°
α = 12°

53
Abbildung 5-23 Vortriebskraft Vergleich für verschiedene Anströmgeschwindigkeiten
Im Vergleich der Kraftauswertungen für die drei verschiedenen Geschwindigkeiten ist Folgendes zu erkennen: Je höher die Anströmgeschwindigkeit der Profile ist, desto später neigt die Strömung zum Ablösen. Dieses Verhalten deckt sich mit der Theorie. Eine Strömung kann der Profilkontur länger folgen, wenn sie aufgrund der höheren Geschwindigkeit mehr Energie besitzt. Es scheint, als würde die Winkelkonfiguration mit der größten Vortriebskraft in Abbildung 5-22 das beste Setup für die jeweilige scheinbare Windgeschwindigkeit sein. Dem ist jedoch nicht so, da in dieser Auswertung eine entscheidende Randbedingung außer Acht gelassen wurde: Die Stabilität. Der Katamaran kann nur ein bestimmtes endliches Stabilitätsmoment aufbringen. Bei Überschreitung dieses Stabilitätsmoments durch das von der Seitenkraft des Flügels erzeugte krängende Moment, wird der Kat kentern. Bei welcher Winkelkonfiguration, ab welchem Wind also, eine Kenterung unvermeidlich wäre, kann nicht ausschließlich mit den Ergebnissen der 2 dimensionalen CFD-Simulation vorhergesagt werden.
In einer 3-dimensionalen Untersuchung des Problems können auch Momente um die Raumachsen bestimmt werden. Außerdem interessiert, wie sich 3D Effekte auf die Performance auswirken.
Da mit Hilfe der 2D Analyse des Problems die grundlegenden Trends der Auswirkungen des Trimms auf die Fahrtleistung geklärt worden sind, können die vielversprechenden Winkelkonfigurationen mittels 3-dimensionaler RANSE Rechnungen genauer untersucht werden.
0.00
50.00
100.00
150.00
200.00
250.00
300.00
350.00
0 10 20 30 40 50 60 70
Vort
riebs
kraf
t in
Kurs
richt
ung
bei 4
5° A
WA
[N]
Versuchnummer
Vergleich der Vortriebskraftgenerierung bei verschiedenen Anströmungsgeschwindigkeiten
8th Series 16 m/s
8th Series 8 m/s
8th Series 4.5 m/s

54
5.5.4. SCHLUSSFOLGERUNG
Die 2D Analyse der Profilkonfiguration hat gezeigt, dass die Anstellwinkel der einzelnen Elemente sehr große Auswirkungen auf die Krafterzeugung haben. Der Hauptanstellwinkel α sollte so groß wie möglich gewählt werden, ohne dass die Strömung abreist. Das ist bei 10° - 12°der Fall. Um die Vortriebskraft zu erhöhen, sollte das hintere Element so angestellt werden, dass die Strömung gerade noch an der Saugseite anliegt, was bei γ ≈ 18° gewährleistet ist. Um dieses Ziel zu erreichen, muss der Slot entweder größtmöglich geöffnet sein, bzw. bei größeren Anstellwinkeln des hinteren Elements, γ > 14°, etwas verkleinert werden. Der Anstellwinkel der Flap β sollte dabei 6° nicht überschreiten. Bei höheren Windgeschwindigkeiten kann der Hauptanstellwinkel etwas größer gewählt werden, da die Strömung erst später ablöst.
Durch die Nutzung der drei Elemente kann der Flügel nicht in einem größeren Anstellwinkelbereich arbeiten. Bei Hauptanstellwinkeln zwischen 12° und 14° reist die Strömung trotz Nutzung des Sloteffekts ab. Allerdings kann durch geschickte Anstellung der Profile die Vortriebskrafterzeugung verdreifacht werden.
Die Ergebnisse der 2D Simulation ergeben, dass es einen Einfluß der Flap auf das Strömungverhalten gibt. Dieser ist allerdings begrenzt. Tests auf dem Wasser müssen zeigen, ob die Vorteile durch die Nutzung der Flap die Nachteile von zusätzlichem Gewicht und Erhöhung der Baukoplexität rechfertigen.
Für die Bestimmung des krängenden Moments in Abhängigkeit von der Winkelkonfiguration des Flügels und der Windgeschwindigkeit, ist eine 3-dimensionale Untersuchung unumgänglich. Ferner muss überprüft werden, ob der Trend der Kraftentwicklung durch Variation der Anstellwinkel auch bei Berücksichtigung der genauen Geometrie des Prototyps und bei Berücksichtigung des Einflusses von 3D Effekten der Umströmung mit den Erkenntnissen aus der 2-dimensionalen Untersuchung übereinstimmt.

55
5.6. 3D UNTERSUCHUNGEN DES PROTOTYPS
Aufgrund der mit der Höhe variierenden Form des Flügels, dem von der Natur vorgegebenen Windprofil und den grundsätzlichen Unterschieden zwischen zwei- und dreidimensionalen Strömungen, sind 3D Untersuchungen essenziell.
Durch die Vorüberlegungen und Voruntersuchen in 2D ist eine Auswahl an Setups geschaffen worden, welche in der 3D Simulation realitätsnäher untersucht werden kann. Ziel ist es, den 2D Untersuchungen möglichst ähnliche 3D Simulationen gegenüberzustellen, um zu analysieren, wie sehr 3D Effekte die Ergebnisse beeinflussen und ob es möglich ist, von den 2D Ergebnissen auf 3D Ergebnisse zu schließen, ohne die umfangreichen Rechnungen in jedem Fall durchführen zu müssen. Des Weiteren soll geklärt werden, wie groß das krängende Moment ist, welches aufgrund der Flügelumströmung entsteht. Falls dieses für bestimmte Setups oberhalb des maximalen aufrichtenden Moments liegt, können diese Winkelkonfigurationen bei entsprechendem Wind nicht gefahren werden.
Trotz der verwendeten modernen Hardware7, ist eine gewissenhafte Ressourcennutzung wichtig. Eine Gitternetzstudie soll zeigen, welche Diskretisierung der Domain in vertretbarer Zeit zu aussagekräftigen Ergebnissen kommt. Im Anschluss an die Gitternetzstudie wird mit dem für gut befundenem Setup die eigentliche Simulation von 27 ausgewählten 3D Winkelkonfigurationen bei 3 verschiedenen Windgeschwindigkeiten durchgeführt.
5.6.1. GITTERNETZSTUDIE
Exemplarisch sind verschiedene Netze zur Repräsentation der Geometrie und Diskretisierung der Domain erstellt worden 8 . Angewendet wurden Winkelkonfiguration mit einem Hauptanstellwinkel von 10°, Flapwinkel von 3° und einem Anstellwinkel des hinterem Elements von 12° (kurz: Wing_10_3_12). Dabei wurde von einer Gitterkonfiguration ausgegangen, welche alle von der Software vorgegebenen Gitterparameter in punkto Gitterqualität erfüllt. Besonders geachtet worden ist auf die Vergleichbarkeit der Gitter. Da StarCCM+ einen automatischen Gittergenerierungs-Algorithmus verwendet, der sich auf die Base Size bezieht, ist es leicht, globale Veränderungen am Netz umzusetzen, indem die Base Size angepasst wird. Diese Bezugsgröße wurde so eingestellt, dass das gröbste Gitter 1 Million Zellen hat, das mittlere 1,5 Millionen, ein feines 3,5 Millionen und ein sehr feines 8,8 Millionen.
Allerdings muss besonderes Augenmerk auf die Definition des wandnahen Bereiches (dem Prism Layer) gelegt werden. Die äußerst entscheidende Auflösung der wandnahen Strömung muss für
7 bis zu 100 Intel-Xeon Kerne, 192 Giga Byte Arbeitsspeicher, extrem hohe Festplatten Ressourcen
8 Simulationsnamen sortiert nach Netzauflösung - grob: Wing_10_3_12.0013_2, mittel: Wing_10_3_12.0011_2, fein: Wing_10_3_12.0008_2, sehr fein: Wing_10_3_12.0012_2

56
unterschiedlich fein aufgelöste Gitter zum einen ähnliche Schichtdicken der ersten Zellen ergeben, zum anderen aber einen kontinuierlichen Übergang ins veränderte Volumengitter ermöglichen. Da bei gleichbleibender Geometrie und Anströmgeschwindigkeit die physikalische Grenzschichtdicke nicht variiert, soll die Dicke des Prism Layers gleich bleiben. Die Dicke der wandnahesten Zelle muss ebenfalls in etwa gleich bleiben, damit der dimensionslose Wandabstand y+ möglichst konstant ist. Da bei den 4 Testsimulationen mit unterschiedlichen Gittern ausschließlich die Ergebnisveränderungen aufgrund der feineren bzw. gröberen Diskretisierung der gesamten Domain interessieren, sollen alle anderen möglichen Beeinflussungsquellen ausgeschlossen werden. Eine Änderung des y+ Wertes könnte eine Beeinflussung der numerischen Lösung zur Folge haben und muss daher vermieden werden. In StarCCM+ gibt es die Möglichkeit, mit 3 Parametern die Beschaffenheit des Prism Layers anzupassen. Es sind dies die Number of prism layers N (Schichtanzahl), der Stretching Factor f (Wachstumsfaktor) und die Prism Layer Thickness δ (Schichtdicke). Der Abstand der einzelnen Schichtgrenzen von der Wand s(ni ) kann folgendermaßen berechnet werden (24):
( ) ( )( )i
i
tanhfnN1sn1
tanhf
−=δ⋅+ (5.23)
Der Laufindex ni beginnt bei Null. Tabelle 5-3 fasst die Gittereinstellungen zusammen.
Tabelle 5-2 Gittereinstellungen
[…]_0013 […]_0011 […]_0008 […]_0012
Zellanzahl 1.066.996 1.530.548 3.407.656 8.862.234
Base Size 12 9 6 4 Points per Circle 48 36 24 18
Schichtanzahl N 3 3 4 6
Wachstumsfaktor f 1.5 1.5 1.1 1
Gesamt Schichtdicke δ 5 5 5 6
Dicke der wandnahsten Schicht s(1) 0.79 0.79 0.77 0.62
„Eine Kette ist so stark wie ihr schwächstes Glied.“ Und die Aussagekraft einer numerischen Simulation hängt von der Qualität der Diskretisierung des Raumes ab, in dem sich das Fluid bewegt. Um heraus zu finden, wann ein Gitter genau genug ist und ab welcher Zellanzahl eine Verfeinerung unnütz ist, muss das Ergebnis einer Gitternetzstudie betrachtet werden (Abb. 5-24, 5-25). Ergebnisrelevante Werte, wie der Lift oder der Drag werden in Abhängigkeit der Zellanzahl aufgetragen. In der Theorie werden sich die Werte mit steigender Zellanzahl einem Grenzwert annähern. Als Resultat der Gitterstudie kann die Zellanzahl für das zukünftige Setup so gewählt werden, dass sie am Anfang des quasikonstanten Bereichs liegt (rot

57
eingekreist):
Abbildung 5-24 Theoretisches Ergebnis einer Gitterstudie
Die Ergebnisse der hier durchgeführten Gitterstudie weichen geringfügig von der Theorie ab:
Abbildung 5-25 Ergebnis der Gitterstudie
Für die weiteren Berechnungen liegt das 3,5-Millionen-Zellen-Gitter zu Grunde, da in diesem Falle der Drag nur um 0,8 Newton vom Wert des 8,8-Millionen-Zellen-Gitters abweicht. Der Lift weicht um 4 Newton ab. Bei einem Absolutwert von 248 Newton sind das ca. 2% Unterschied. Die Einsparung von 5,3 Millionen Zellen einspricht einer Resourcen-Reduzierung von 150%. Entscheidend ist, dass das gewählte Gitter nicht in einem Gebiet starker Zellanzahl bedingter Kraftwertschwankungen liegt.
23.5
24
24.5
25
25.5
26
26.5
27
27.5
28
236
238
240
242
244
246
248
250
0 2500000 5000000 7500000 10000000
Drag
[N]
Lift
[N]

58
5.6.2. PHYSIKALISCHE PARAMETER
Die physikalischen Parameter der 3D Simulationen sind aus den 2D Simulationen übernommen worden. Für die 3D Simulation wurden die Winkelkonfigurationen ausgewählt, welche die größte Vortriebskraft bei einem Anstellwinkel des hinteren Elementes zwischen 0° und 20° im 2D Fall erzeugen (Tab. 5-4).
Da aufgrund der 3-dimensionalen Umströmung induzierter Widerstand entsteht, müssen in Hinsicht auf das passende 3D Setup vergleichbare Anströmbedingungen geschaffen werden. Nach Prandtl können der induzierte Wiederstand und der induzierte Anstellwinkel berechnet werden (siehe Kap. 2.2.). Der induzierte Anstellwinkel muss zum Anstellwinkel der Profile im 2D Fall addiert werden, um sinnvolle 3D Rechnungen durchführen zu können.
Da der induzierte Anstellwinkel nur dann konstant über die Höhe des Flügels ist, wenn die Auftriebsverteilung elliptisch ist, muss diese Bedingung für den Prototyp überprüft werden.
Abbildung 5-26 Auftriebs, Windgeschwindigkeits- und Oberflächenverteilung des Flügels
In Abbildung 5-26 sind das Windprofil und die Oberflächenverteilung in Abhängigkeit von der Flügelhöhe z qualitativ dargestellt. Die theoretische Auftriebsverteilung wurde berechnet (grüne Kurve). Da bei dem Prototyp sowohl die Flügelspitze als auch die Unterkante umströmt wird, entstehen zwei Wirbelschleppen. Es ist wichtig, dass die Auftriebsverteilung zu beiden Enden hin elliptisch abnimmt. Die Auftriebsverteilung am Flügel kommt dieser Forderung nach.
Berechnungsgrundlage ist die Definition des Auftriebs:

59
2LLuftLcAV=⋅δ⋅⋅ (5.24)
Die charakteristische Auftriebskurve entsteht durch die Überlagerung von Windprofil und der Verteilung der Sehenlänge über die Höhe. Aufgrund des Flügeldesigns ist die Auftriebsverteilung elliptisch. Der induzierte Anstellwinkel wird mit Formel (2.4) bestimmt und zum Hauptwinkel α addiert. In Tabelle 5-4 sind die Winkelkonfigurationen der effektivsten 2D Konfigurationen und deren 3D Pendants aufgelistet.
Tabelle 5-3 Auflistung der 3D Simulationen
Anstellwinkel γ Auswahl 4.5 m/s 2D / 3D
Auswahl 8 m/s 2D / 3D
Auswahl 16 m/s 2D / 3D
20° 18° 16° 14° 12° 10° 8° 6° 4° 2° 0°
8_4_20 / 11_4_20 8_4_18 / 11_4_18 8_2_16 / 10_2_16 10_0_14 / 12_0_14 10_0_12 / 12_0_12 10_0_10 / 12_0_10 10_0_8 / 12_0_8 10_0_6 / 12_0_6 12_0_4 / 14_0_4 12_0_2 / 14_0_2 12_0_0 / 14_0_0
8_6_20 / 11_6_20 8_6_18 / 11_6_18 10_2_16 / 12_2_16 10_0_14 / 12_0_14 10_0_12 / 12_0_12 10_0_10 / 12_0_8 / 14_0_8 12_0_6 / 12_0_4 / 14_0_4 12_0_2 / 12_0_0 / 13_0_0
10_4_20 / 12_4_20 10_4_18 / 12_4_18 10_4_16 / 12_4_16 12_0_14 / 14_0_14 12_0_12 / 14_0_12 12_0_10 / 13_0_10 12_0_8 / 13_0_8 12_0_6 / 13_0_6
Wie Tabelle 5-4 zeigt, werden 27 3D RANSE Rechnungen für die volle Flügelgröße auf den Clustern gerechnet. Ziel ist es zu ermitteln, ob die hier gefundenen Trends mit der Kraftentwicklung der Profile im 2D Setup vergleichbar sind. Zu bedenken ist: Viele Effekte der Strömungsmechanik werden nur im dreidimensionalen Fall abgebildet. Randwirbel werden berücksichtigt, Fluidbewegungen entlang der Hochachse des Flügels folgen und der sogenannte Downwash beeinflusst die Umströmung. Desweiteren sind die Gitter der 3D Domain den Gittern der 2D Simulation zwar ähnlich aber nicht identisch. Die Zelldichte ist geringer.
5.6.3. ERGEBNIS UND AUSWERTUNG
VERGLEICH 2D / 3D SIMULATION
Der erste optische Vergleich von Ergebnissen der 3D und 2D Simulation in der 4 m Schnittebene zeigt eine große Ähnlichkeit. Beim Übereinanderlegen der Druckverteilungen fallen die übereinstimmenden Druckbereiche auf. Die analytische Vorhersage des induzierten Anstellwinkels von Prandtl stimmt mit den in der Simulation gemachten Beobachtungen

60
überein. In diesem Fall wurde der Flügel in der 3D Simulation 3° stärker angestellt als in der vorherigen 2D Untersuchung, trotzdem sind die Druckbereiche nahezu deckungsgleich. Wäre dieselbe Winkelkonfiguration (11_6_20) von einer 2D Strömung umgeben sein, würde die Strömung abreißen.
Abbildung 5-27 Schnitt durch die 3D Domain in 4 m Höhe, Wing 11_6_20
Abbildung 5-28 2D Simulation, Mod8_8_6_20
Desweiteren werden die konkreten Vortriebskraftwerte verglichen, welche zuvor eingeführt wurden. Auch hier wird davon ausgegangen, dass der Kurs 45° zum anströmenden Wind beträgt. In der Abbildung 5-29 sind die Vortriebskraftkoeffizienten der 2D Untersuchungen halbtransparent dargestellt. Die obere blaue Kurve „Best of 2D“ verbindet für jeden Anstellwinkel des hinteren Elements die beste Winkelkonfiguration. Diese dienen den 3D Berechnungen als Basis und wurden mit Addition des induzierten Anstellwinkels im Raum
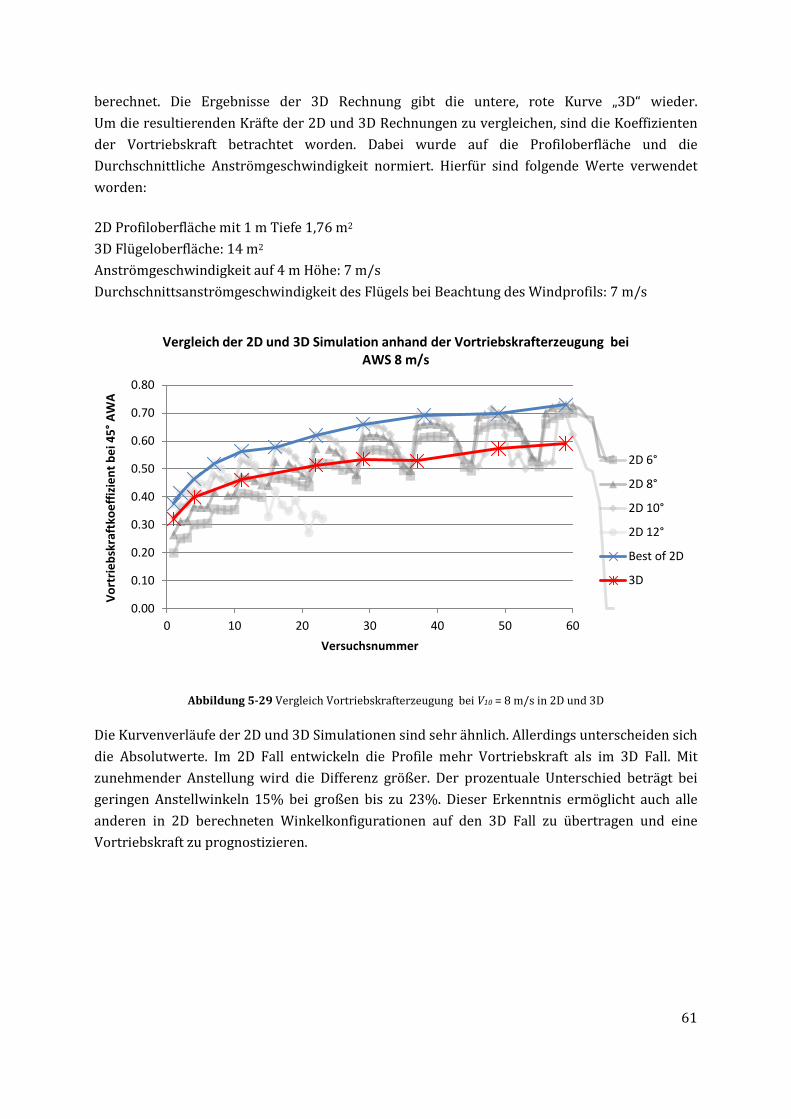
61
berechnet. Die Ergebnisse der 3D Rechnung gibt die untere, rote Kurve „3D“ wieder. Um die resultierenden Kräfte der 2D und 3D Rechnungen zu vergleichen, sind die Koeffizienten der Vortriebskraft betrachtet worden. Dabei wurde auf die Profiloberfläche und die Durchschnittliche Anströmgeschwindigkeit normiert. Hierfür sind folgende Werte verwendet worden:
2D Profiloberfläche mit 1 m Tiefe 1,76 m2 3D Flügeloberfläche: 14 m2 Anströmgeschwindigkeit auf 4 m Höhe: 7 m/s Durchschnittsanströmgeschwindigkeit des Flügels bei Beachtung des Windprofils: 7 m/s
Abbildung 5-29 Vergleich Vortriebskrafterzeugung bei V10 = 8 m/s in 2D und 3D
Die Kurvenverläufe der 2D und 3D Simulationen sind sehr ähnlich. Allerdings unterscheiden sich die Absolutwerte. Im 2D Fall entwickeln die Profile mehr Vortriebskraft als im 3D Fall. Mit zunehmender Anstellung wird die Differenz größer. Der prozentuale Unterschied beträgt bei geringen Anstellwinkeln 15% bei großen bis zu 23%. Dieser Erkenntnis ermöglicht auch alle anderen in 2D berechneten Winkelkonfigurationen auf den 3D Fall zu übertragen und eine Vortriebskraft zu prognostizieren.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0 10 20 30 40 50 60
Vort
riebs
kraf
tkoe
ffizi
ent b
ei 4
5° A
WA
Versuchsnummer
Vergleich der 2D und 3D Simulation anhand der Vortriebskrafterzeugung bei AWS 8 m/s
2D 6°
2D 8°
2D 10°
2D 12°
Best of 2D
3D

62
SLOT EINFLUSS
In den folgenden Abbildungen ist die Strömung am dreidimensionalen Flügel dargestellt. In den Grafiken sind Stromlinen abgebildet, welche den Strömungsverlauf in der Nähe der Profile visualisieren. Sie sind in Abhängigkeit der Luftgeschwindigkeit eingefärbt: Blau für geringe Geschwindigkeiten, rot für hohe Geschwindigkeiten.
Abbildung 5-30 zeigt den Flügel in der Draufsicht. Er ist von einer V10 = 8 m/s schnellen Strömung umgeben. Der Hauptwinkel α beträgt 11°, der Flapwinkel β ist 6° und der Winkel des hinteren Elements γ ist 18°. Somit ist das hintere Element 29° relativ zur ungestörten Anströmung angestellt. Auf einer Höhe von 8 m werden vor dem Flügel Stromlinien entlang einer horizontalen Linie quer zu Anströmrichtung erzeugt, welche die Umströmung des Flügels verdeutlichen. An der Leading Edge des Hauptelements ist der Staupunkt deutlich zu erkennen. Die Strömungsgeschwindigkeit ist minimal und die Stromlinien teilen sich auf, um den Flügel auf der Durckseite bzw. der Saugseite zu umströmen.
An der Nase des Hauptelements beschleunigt die Strömung auf ein Vielfaches der ungestörten Anströmung von 8 m/s und erreicht 21,7 m/s. Dieser Bereich generiert einen Unterdruck, der auch zur Entstehung von Kraftkomponenten entgegengesetzt zur Strömungsrichtung führt. Der grüne Bereich entlang der Oberseite des Hauptprofils zeigt die schnelle Bewegung der Luft, in deren Folge entsprechend des Bernoullischen Gesetzes, ein Sog entsteht. Auf der Unterseite ist der gegenteilige Effekt zu erkennen. Die Luft bewegt sich langsamer als in der ungestörten Anströmung, was der Grund für die Ausprägung der Druckseite ist.
Entlang der Saugseite droht mit zunehmender Profillänge die Strömung aufgrund des positiven Druckgradienten abzulösen. Neben dem positiven Druckgradienten, führt die Reibung an der Profiloberfläche zur Verlangsamung und zum Energieverlust der Strömung.
Die Anstellung des hinteren Profils fordert eine weitere Richtungsänderung der Strömung. Zu der Anstellung des Hauptprofils kommt der Winkel des hinteren Elements γ von 18° hinzu. Ein durchgängiges Profil mit einem Knick von 18° würde die Strömung definitiv zum abreißen bringen. An dieser Stelle kommt allerdings der positive Einfluss des Slots zum Tragen, der den Strömungsabriss verzögert.
Durch die Lücke zwischen Flap-Hinterkante und der Vorderkante des hinteren Elements kann Luft von der Druckseite des Flügels beschleunigt werden und in die verlangsamte Strömung auf der Oberseite gelangen. Die erneute Beschleunigung und damit verbundene Energieanreicherung der saugseitigen Strömung führt zu einer an der Oberfläche anliegenden Umströmung des hinteren Elements. Somit erzeugt das hintere Element zusätzlichen Auftrieb und trägt zur Erhöhung der Bootsgeschwindigkeit und Verminderung von Widerstand bei.

63
Abbildung 5-30 Stromlinien visualisieren die Flügelumströmung
Abbildung 5-31 Stromlinien im Slot
In der Draufsicht ähnelt die visualisierte 3D Strömung der 2D Strömung sehr. Wie im Theorieteil zum induzierten Widerstand beschrieben, beeinflusst die 3-dimensionale Ausgleichsströmung zwischen Druck- und Saugseite an der Flügelspitze auch die Strömungsrichtung auf den Tragflächen: Eine vertikale Bewegungskomponente führt auf der Saugseite zu einer Abwärtsbewegung und auf der Druckseite zu einer aufwärts gerichteten Bewegung zur Spitze hin. Abbildung 5-32 veranschaulicht diesen 3D Effekt. Die in 8 Metern Höhe liegende Ebene dient als Vergleichslevel. Die vorher zur Horizontalebene parallel verlaufenden Stromlinien fächern sich entlang des Flügels nach oben bzw. unten auf. Am Slot kann man erkennen, wie die aufsteigende Strömung hinter dem Slot eine Abwärtsbewegung erfährt. Hinter dem Flügel

64
steigen die Stromlinen auf und verbinden sich zur Wirbelschleppe, in der Rotationsenergie gespeichert ist und nicht zur Auftriebserzeugung beiträgt.
Abbildung 5-32 Vertikale Bewegung aufgrund von 3D Effekten
Der Spitzenwirbel und die im weiteren Strömungsverlauf entstehende Wirbelschleppe, ist im oberen Teil der Abbildung 5-33 zu erkennen. Desweiteren ist die Druckverteilung auf der Oberfläche qualitativ dargestellt: Blau und kalte Farben stehen für starke Unterdruckbereiche, welche mit zunehmender Entfernung von der Anströmkante schwächer werden. Hinter dem Slot, in der Mitte des Flügels, sinkt der Druck erneut, aufgrund der im Slot beschleunigten Strömung. An Flügelspitze und Flügelbasis sind auf der Oberfläche Unregelmäßigkeiten aufgrund der druckausgleichenden Umströmung der Enden zu sehen.

65
Abbildung 5-33 Flügelseitenansicht mit Druckverteilung und Wirbelschleppe
Die Ursache für die unterschiedlich hohen Vortriebskraftkoeffizienten der 2D- und 3D Ergebnisse sind in den verschiedenen Strömungscharakteristiken zu finden. Ein fundamentaler Unterschied ist der Druckausgleich an der Flügelspitze und Flügelbasis im 3D Fall. Er verursacht den Spitzenwirbel (siehe Kap. 2.2). Im Spitzenwirbel und allen kleinen Scherwirbeln an den Abströmkanten der Flügelelemente steckt Energie, die nicht zur Vortriebskrafterzeugung beiträgt. Als Folge der Wirbelbildung ändert sich auch die Druckverteilung auf der Oberfläche des Flügels (Abb. 5-32). Erkennbar sind Unregelmäßigkeiten im Druckverlauf an der Flügelspitze sowie eine Unterdruckverschiebung von der Profilnase zur Mitte des Profils. Somit wird der resultierende Kraftvektor im Bereich der Flügelbasis weniger in Vortriebsrichtung zeigen. Desweiteren variiert im 3D Fall die Sehenlänge der Flügelprofile über die Höhe und ist nicht konstant, wie im 2D Fall. Das hat auch eine Veränderung der Reynoldszahl über die Höhe zur Folge und kann sich auf die Auftriebserzeugung auswirken.

66
MOMENTE AM FLÜGEL
Mit Hilfe der 3-dimensionalen Untersuchungen konnten die entstehenden Momente aufgrund der Umströmung des Flügels bestimmt werden. Für alle 27 3D Simulationen wurden jeweils die drei Kräfte Lift, Drag und Fz sowie die drei Momente MXflügel, MYflügel und MZflügel aufgezeichnet. Die Kräfte und Momente beziehen sich auf die Richtung der ungestörten Anströmung x, sie liegt entgegen der Strömungsrichtung.
In Abhänigkeit von der scheinbaren Windrichtung und der scheinbaren Windgeschwindigkeit, kann für jedes simulierte Flügelsetup das krängende Moment MXboot angegeben werden. Die Betrachtung der Ergebnisse bestätigen die Theorie: Das krängende Moment wird größer, je höher Am-Wind gesegelt wird und es ist festzustellen, dass eine stärkere Anstellung des hinteren Elements ebenfalls das Moment um die Längsachse erhöht. Durch Berechnung des maximalen aufrichtenden Moments des A-Cats in Kapitel 2.3. steht fest. Das krängende Moment darf 3400 Nm nicht überschreiten. Mit Hilfe der berechneten Daten kann die optimale Winkelkonfiguration in Abhängigkeit der Umgebungbedingungen vorhergesagt werden. Exemplarisch zeigt Abbildung 5-34 Optima von Flügelkonfigurationen. Die Schnittpunkte des maximalen Krängungsmoments mit den Kurvenverläufen geben, für eine bestimmte scheinbare Windgeschwindigkeit, das jeweils beste Setup in Abhängigkeit der Anstellung des hinteren Elements an.
Abbildung 5-34 Momentenverläufe verschiedener Flügeleinstellungen für 45° AWA
Während der Beschleunigung ändert sich der Winkel und die Geschwindigkeit des scheinbaren Windes. Es muss ein neues Optimum gefunden werden.
0 500
1000 1500 2000 2500 3000 3500 4000
0 2 4 6 8 10 12
krän
gend
es M
omen
t [N
m]
scheinbare Windgeschwindigkeit VA [m/s]
Momentenverläufe versch. Winkelkonfig. bei 45° AWA
Max
γ=20°
γ=16°
γ=12°
γ=8°
γ=4°
γ=0°

67
Abbildung 5-35 Momentenverläufe verschiedener Flügeleinstellungen mit für 60° AWA
Abbildung 5-35 zeigt Optima für einen höheren scheinbaren Windwinkel von 60°. Bei dieser Konfiguration kann dieselbe Winkeleinstellung auch noch bei höheren Windgeschwindigkeiten gefahren werden. Um anhand der Vielzahl von Parametern (VA, AWA, VS und den hydrodynamischen Eigenschaften) für jede Segelsituation eine optimale Flügelkonfiguration zu finden, wird ein Velocity Predicction Program (VPP) benötigt. Die in dieser Arbeit bestimmten physikalischen Zusammenhänge der Flügel Aerodynamik sind dafür von zentraler Bedeutung.
0
500
1000
1500
2000
2500
3000
3500
4000
0 2 4 6 8 10 12 14
krän
gend
es M
omen
t [N
m]
scheinbare Windgeschwindigkeit VA [m/s]
Momentenverläufe versch. Winkelkonfig. bei 60° AWA
Max
γ=20°
γ=16°
γ=12°
γ=8°
γ=4°
γ=0°

68
6. EXPERIMENTE MIT DEM PROTOTYPEN
6.1. MESSTECHNIK
Ziel ist es, 4 Parameter zur Bestimmung des Segelzustandes mit Hilfe eines Messsystems zu ermitteln und für eine spätere Auswertung zu loggen. Die 4 entscheidenen Parameter sind:
• Die Windgeschwindigkeit an der Flügelspitze • Die Windrichtung an der Flügelspitze • Die Bootsgeschwindigkeit • Die Fahrtrichtung
Zu beachten ist, dass aufgrund des Reglements jegliche Energiespeicher an Bord verboten sind. Des Weiteren sollte aus praktischen Gründen auf eine Verkabelung des Flügels verzichtet werden. Folgende Messgeräte wurden verwendet:
ANEMOMETER
Im Flügeltop, auf 10 m Höhe, ist ein Anemometer der Firma Tacktick (T120) installiert worden. Der Windmesser zeichnet sich durch sein geringes Gewicht von 230 g aus. Er wird über eine integrierte Solarzelle mit Strom versorgt und sendet die erfassten Daten in Echtzeit per Funk zu einer digitalen Anzeige (Tacktick T112), die ebenfalls mit einer Solarzelle ausgestattet ist. Zudem sind der Windmesser und die Anzeige wasserdicht und können Kenterungen überstehen.
Im Rahmen des Projektes „WannSeGel“ an der TU-Berlin wurde der Windgeber im Windkanal des Instituts für Strömungsmechanik und Technische Akustik (ISTA) geprüft. Dabei konnte eine gute Übereinstimmung zwischen dem Windmesser der Firma Tacktick und den Messinstrumenten des ISTA im Bereich von 0,7 m/s bis 12 m/s (etwas niedrigere Wert) und sehr gute Übereinstimmungen für 12 m/s bis 20 m/s ermittelt werden. Da durch die Krängung des Bootes eine winkelabhänige Anströmung des Windmessers entsteht, wurden auch Tests bei Anstellung des Anemometers zwischen 0° und 40° durchgeführt. Festgestellt werden konnte, dass bei einer Strömungsgeschwindigkeit von 6 m/s das Ergebnis winkelunabhängig ist. Da der Flügel im Bereich von 0° bis 10° Krängung gefahren wird, werden keine Probleme durch eine winkelabhängige Anströmung entstehen.
Abbildung 6-1 Tacktick T101 Wind Set, Quelle: Busse Yachtshop

69
GPS
Mit Hilfe des GPS-Systems können die Geschwindigkeit über Grund und die Fahrtrichtung erfasst werden. Derzeit wird ein GPS-System der Firma Velocitek genutzt. Die Daten werden auf einer SD-Karte gespeichert und im Nachhinein ausgewertet.
NMEA-INTERFACE
Das Tacktick T122 NMEA Interface wird verwendet, um die Daten des Windmessers und des GPS-Geräts zu empfangen und mit Hilfe eines zusätzlichen Moduls zu loggen. Der Übertragungsstandart heißt NMEA und wird von verschiedenen nautischen Geräten genutzt.
Abbildung 6-2 Display des Anemometers, GPS von Velocitek
STRÖMUNGSVISUALISIERUNG
Da die Luftströmungen am realen Flügel nicht so leicht wie in einer CFD-Simulation visualisiert werden können, musste auf altbewährte Wollfäden (Telltales) zurück gegriffen werden. Diese wurden an Orten befestigt, an denen interessante Strömungsphänomene zu erwarten sind. Drei wasserdichte HD-Kameras der Firma GoPro, sind am Mast installiert worden, um Aufnahmen mit einer hohen Framerate und guter Auflösung zu erhalten.
Abbildung 6-3 HD-Kameras und Anemometer im Flügeltop

70
6.2. DURCHFÜHRUNG –DER ERSTE SEGELTÖRN
Kurz nach Fertigstellung des Prototyps im Winter 2011, machten wir uns auf den Weg nach Marseille in Süd Frankreich. Im Etang de Berre, einem Salzhaff westlich von Marseille, hofften wir auf gute Segelbedingungen aufgrund der Trennung zum Mittelmeer und den demzufolge kleineren Wellen. Leider hatten wir an den meisten Tagen mehr als 5 Windstärken und wollten eine Beschädigung des Flügels nicht in riskieren. An dem einzigen uns verbliebenen Segeltag schlug das Wetter zur nahezu Flaute um. Bei Windgeschwindigkeiten zwischen 1 m/s und 2 m/s, war allerdings die Installation des Flügels einfach. Leider konnten auf den Testfahrten keine verwendbaren Daten gesammelt werden, da das GPS-System einen technischen Defekt hatte und die Telltales sich bei so wenig Wind fast nicht bewegten. Dennoch waren die Tests ein Erfolg, denn die prinzipielle Funktion des Flügels konnte bewiesen werden. Die selbstwenden Vorrichtungen der Takelage funktionierten zuverlässig. Kleinere Schwachstellen wurden gefunden und umgehend behoben.
Abbildung 6-4 Testfahrt

71
7. FAZIT UND AUSSICHT
Das entwickelte und gebaute Flügelrigg hat gegenüber einem konventionellen Segel strömungstechnische Vorteile. Da sich insbesondere die Trimmmöglichkeiten des Flügels grundlegend von denen eines herkömmlichen Segels unterscheiden, müssen die Strömungsvorgänge am Prototyp verstanden werden. Die vorliegende Arbeit liefert diese Erkenntnisse.
Mit Hilfe modernster CFD-Technik wurde das Strömungsverhalten des Prototyps, für verschiedene Bedingungen analysiert. Dabei konnte in validierten 2D Simulationen der Zusammenhang zwischen Variation der Anstellwinkel und der Auftriebserzeugung deutlich gemacht werden. Das hintere Profil des aus drei Elementen bestehenden Flügelriggs, hat eine entscheidende Bedeutung, da es der Gesamtprofilform eine Wölbung verleiht. Somit sind höhere Auftriebskoeffizienten erreichbar. Ein Strömungsabriss wird durch den Sloteffekt verhindert und kann mit Hilfe der Flap weiter hinaus gezögert werden.
Zur Überprüfung der Anwendbarkeit der erlangten Kenntnisse auf den realen Prototyp sind 3D Simulationen durchgeführt worden. Knapp 30 repräsentative Testsetups wurden am Flügel simuliert. Dabei konnten 3D Effekte, wie der Spitzenwirbel und der Downwash, untersucht werden. Das Resultat der RANSE-CFD-Simulationen zeigt, dass die Ergebnisse der 3D Umströmung den vorhergesagten Trends der 2D Rechnungen entsprechen. Zur Übertragung der Ergebnisse muss der analytisch bestimmbare induzierte Anstellwinkel zum Hauptanstellwinkel α addiert werden, um den Downwash auszugleichen. Die Vortriebkoeffizienten von 2D und 3D Rechnungen wurden vergleichen. Es konnte festgestellt werden, dass der Flügel aufgrund von 3D Effekten 15% bis 23% weniger Vortrieb erzeugt als in den 2D Berechnungen vorhergesagt.
Um eine Prognose der optimalen Winkelkonfiguration in Abhängigkeit von den Segelbedingungen zu geben, musste geprüft werden, ob das aufrichtende Moment größer als das krängende Moment ist. In diesem Zusammenhang wurden für alle 3D Simulationen die resultierenden Momente erfasst und können als Randbedingung bei einer Auswertung genutzt werden.
Aufgrund der vielen veränderlichen Parameter beim Segeln und deren Wechselwirkungen, ist die Angabe einer optimalen Flügelkonfiguration unter Berücksichtigung der gesamt Performance nur mit Hilfe eines Velocity Prediction Programs (VPP) möglich. Ein VPP kombiniert die Erkenntnisse aus verschiedenen Quellen. So können die hier beschriebenen aerodynamischen Ergebnisse mit hydrodynamischen Untersuchungen kombiniert werden und eine Geschwindigkeitsprognose für eine große Mannigfaltigkeit an Segelzuständen gegeben werden.
Im Anschluss an diese Arbeit wird Thilo Keller im Rahmen einer Bachelor Arbeit die Rümpfe des A-Cats im Schleppkanal der TU-Berlin untersuchen. Dennis Kraus erstellt ein VPP welches der Erkenntnisse aus beiden Arbeiten kombinieren wird.

72
Der Autor und das gesamte Entwicklungsteam hoffen auf möglichst erfolgreiche Teilnahme an nationalen und internationalen Segelmeisterschaften in der A-Cat Klasse.
Abbildung 7-1 Flügelrigg in Fahrt, die eingezeichneten Stromlinien der 3D CFD Simulation

73
BILDNACHWEIS
Abbildung 1-1 Kontrahenten des Mis-Match AC 1988 (4)................................................................................ 1
Abbildung 1-2 Vestas Sail Rocket, Ausgleich von aero- und hydrodynamischen Kräften ................... 2
Abbildung 1-3 Ablösung hinter dem Mast (8) ....................................................................................................... 3
Abbildung 2-1 Prinzipdarstellung der Zirkulation, Umströmung eines Zylinders ................................. 6
Abbildung 2-2 Prinzipskizze Zirkulationsentstehung ........................................................................................ 7
Abbildung 2-3 Konstruktionsvarianten von Flaps ............................................................................................... 9
Abbildung 2-4 Kräfte an einem Segelboot ............................................................................................................ 11
Abbildung 2-5 Überlagerung von Wind- und Fahrtgeschwindigkeit zum scheinbaren Wind ........ 12
Abbildung 2-6 Scheinbarer Wind ............................................................................................................................. 13
Abbildung 2-7 Momente um die Längsachse ....................................................................................................... 15
Abbildung 3-1 Prinzipskizze A-Kat mit Flügel .................................................................................................... 16
Abbildung 3-2 Winkel- und Koordinatenerläuterung ..................................................................................... 17
Abbildung 4-1 v. l. n. r.: Karbongelege, Laminieren, Aramid-Honeycomp, Bauteil in Vakuumfolie, fertige Rippe ...................................................................................................................................................................... 21
Abbildung 4-2 v. l. n. r.: Styrodurelemente, geschliffene Styrodur-Positivform mit Karbonsandwich, Vakuumprozessierung der Leading Edge, Flügeloberteil aus Karbon ................. 21
Abbildung 4-3 v. l. n. r.: CNC-Fräse mit Steuerrechner, gefräste Elemente der Leading Edges für das hintere Flügelelement, Fräse im Einsatz mit Staubschutz ..................................................................... 22
Abbildung 4-4 v. l. n. r.: Gefräste Negativformen, Sandwichfertigung, fertige Flapelemente unterschiedlicher Sehnenlänge ................................................................................................................................. 23
Abbildung 4-5 v. l. n. r.: Gespachteltes Flügelelement auf 6m Höhe, Hauptelement nach Lackierung, gespannte Folie, Folie nach Bearbeitung mit Heißluft ........................................................... 23
Abbildung 4-6 v. l. n. r.: Lager Hinterkante Hauptelement, Lager mit Drehachse und Flap, Flügelzusammenbau ...................................................................................................................................................... 24
Abbildung 4-7 v. l. n. r.: Twistkontrolle, Cambereinstellung, Flapkontrolle (horizontal) ................. 24
Abbildung 5-1 Domain, INLET links, OUTLET rechts, WALL oben und unten ...................................... 33
Abbildung 5-2 Nachstromfeldverfeinerung in Strömungsrichtung ........................................................... 33

74
Abbildung 5-3 wandnaher Bereich, Profilnase ................................................................................................... 34
Abbildung 5-4 Abströmkante mit definierter 2 Zellen Stärke...................................................................... 34
Abbildung 5-5 Geschwindigkeitsverteilung am NACA 0012, AOA 10° ..................................................... 36
Abbildung 5-6 Liftkoeffizienten Vergleich von Windkanalversuchen und CFD Simulationen ....... 36
Abbildung 5-7 Dragkoefizientenvergleich von Windkanalversuchen und CFD Simulationen ....... 37
Abbildung 5-8 CFD Code - Vergleich ....................................................................................................................... 37
Abbildung 5-9 Druckbeiwerte NACA 0012 bei 0°, 10° und 15° AOA ......................................................... 38
Abbildung 5-10 Ablösung zwischen 12° und 14° Anstellwinkel ................................................................. 40
Abbildung 5-11 Automatische Geometrieerstellung mittel Makros .......................................................... 43
Abbildung 5-12 Ergebnis der automatischen Vernetzung des Flügelschnitts ...................................... 43
Abbildung 5-13 Beispielhafte Residuendarstellung einer 2D CFD Simulation ..................................... 44
Abbildung 5-14 Durckverteilung und Strömungcharakteristik eines Flügelschnittes ...................... 45
Abbildung 5-15 Lift- und Dragverlauf über die Simulationszeit ................................................................. 46
Abbildung 5-16 2D CFD α=10° β=0° γ=14° .......................................................................................................... 47
Abbildung 5-17 2D CFD α=10° β=0° γ=18° .......................................................................................................... 47
Abbildung 5-18 2D CFD α=10° β=2° γ=18° .......................................................................................................... 47
Abbildung 5-19 2D CFD α=10° β=4° γ=18° .......................................................................................................... 47
Abbildung 5-20 Kraftwirkungsrichtungen ........................................................................................................... 50
Abbildung 5-21 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 8 m/s AWS................... 51
Abbildung 5-22 Ausschnitt aus Abbildung 5-22 ................................................................................................ 52
Abbildung 5-23 Vortriebskraft Vergleich für verschiedene Anströmgeschwindigkeiten ................ 53
Abbildung 5-24 Theoretisches Ergebnis einer Gitterstudie ......................................................................... 57
Abbildung 5-25 Ergebnis der Gitterstudie ........................................................................................................... 57
Abbildung 5-26 Auftriebs, Windgeschwindigkeits- und Oberflächenverteilung des Flügels ......... 58
Abbildung 5-27 Schnitt durch die 3D Domain in 4 m Höhe, Wing 11_6_20 ........................................... 60
Abbildung 5-28 2D Simulation, Mod8_8_6_20 .................................................................................................... 60

75
Abbildung 5-29 Vergleich Vortriebskrafterzeugung bei V10 = 8 m/s in 2D und 3D ........................... 61
Abbildung 5-30 Stromlinien visualisieren die Flügelumströmung ............................................................ 63
Abbildung 5-31 Stromlinien im Slot ........................................................................................................................ 63
Abbildung 5-32 Vertikale Bewegung aufgrund von 3D Effekten ................................................................ 64
Abbildung 5-33 Flügelseitenansicht mit Druckverteilung und Wirbelschleppe .................................. 65
Abbildung 5-34 Momentenverläufe verschiedener Flügeleinstellungen für 45° AWA ..................... 66
Abbildung 5-35 Momentenverläufe verschiedener Flügeleinstellungen mit für 60° AWA ............. 67
Abbildung 6-1 Tacktick T101 Wind Set, Quelle: Busse Yachtshop ............................................................. 68
Abbildung 6-2 Display des Anemometers, GPS von Velocitek ..................................................................... 69
Abbildung 6-3 HD-Kameras und Anemometer im Flügeltop ........................................................................ 69
Abbildung 6-4 Testfahrt ............................................................................................................................................... 70
Abbildung 7-1 Flügelrigg in Fahrt, die eingezeichneten Stromlinien der 3D CFD Simulation ........ 72
Abbildung 8-1 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 4.5 m/s AWS.................. 80
Abbildung 8-2 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 16 m/s AWS................... 80
Abbildung 8-3 Wing_10_3_12_0013_2 Gitter....................................................................................................... 81
Abbildung 8-4 Wing_10_3_12_0011_2 Gitter....................................................................................................... 81
Abbildung 8-5 Wing_10_3_12_0008_2 Gitter....................................................................................................... 82
Abbildung 8-6 Wing_10_3_12_0012_2 Gitter....................................................................................................... 82
Abbildung 8-7 Vergleich der Vortriebskraftkoeffizienten bei 4.5 m/s AWS .......................................... 83
Abbildung 8-8 Vergleich der Vortriebskraftkoeffizienten bei 16 m/s AWS ........................................... 83
TABELLENVERZEICHNIS Tabelle 5-1 Auszug des Vergleichs unterschiedlicher Winkelkonfigurationen .................................... 48
Tabelle 5-2 Gittereinstellungen ................................................................................................................................ 56
Tabelle 5-3 Auflistung der 3D Simulationen ........................................................................................................ 59

76
LITERATURVERZEICHNIS
1. Dunlop, Paul. Mr Smith's Amazing Sailboats. [Online] 06 04, 2001. [Cited: 03 04, 2012.] http://www.geocities.com/aerohydro/overviewframeset.htm.
2. 33rd America's Cup. 33rd America's Cup. 1988 - Stars & Stripes US-1 Catamaran. [Online] 02 15, 2010. [Cited: 03 12, 2012.] http://33rd.americascup.com/en/contexte/que-sont-ils-devenus/index.php?idIndex=25&idContent=665.
3. Urtz, k. America's Cup History. 27th America's Cup 1988. [Online] 04 22, 2012. [Cited: 04 25, 2012.] http://www.americas-cup-history.at/deutsch/index_htm_files/203.jpg.
4. Smith, Bernard. The 40-knot Sailboat. New York : Grosset & Dunlap, 1963.
5. Larsen, Paul. Vestas Sailrocket. Power without overturning. [Online] 05 12, 2012. [Cited: 05 10, 2012.] http://sailrocket.com/node/287.
6. Urtz, k. AMERICA'S CUP History 1983 -2010. 33rd America's Cup 2010, Valencia. [Online] 04 22, 2012. [Cited: 04 27, 2012.] http://www.americas-cup-history.at/deutsch/index_28.htm.
7. Gustafsson, Peter. North Sails, Schweiz. 3Di erklärt. [Online] 05 02, 2012. [Cited: 05 02, 2012.] http://northsails.com/TECHNOLOGIE/3DiTechnologie/tabid/20209/language/en-US/Default.aspx.
8. Klassenvereinigung, DE A-Class. A-Cat Klassenvereinigung. Spezifikation. [Online] 06 14, 2011. [Cited: 01 12, 2012.] http://www.a-cat.info/acat/spezifikation/index.html.
9. Verband, Deutscher Segler. DSV-Yardstickzahlen 2012. [Online] 12 01, 2011. [Cited: 02 13, 2012.] http://www.kreuzer-abteilung.org/Public_PDF/5406.PDF.
10. Anthony F. Molland, Stephen R. Turnock. Marine Rudders and Control Surfaces. Oxford, UK : Butterworth-Heinemann, 2007.
11. Marchaj, C. A. Aerodynamik & Hydrodynamik des Segelns. Bielefeld : Verlag Delius, Klasing & Co., 1982.
12. Hoerner. Fluid Dynamic Lift. London : Liselotte A. Hoerner, 1985.
13. E. N. Jacobs, K. E. Ward, R. M. Pinkerton. Technical Report No. 460. The characteristics of 78 related airfoil sections from tests in the variable-density wind tunnel. Hampton : NACA, 1933, p. 300.

77
14. AIRBUS S.A.S. Customer Services. A 340-200/-300 Airplane Characteristics . Blagnac Cedex Frankreich : Airbus, 2012.
15. Hartman. Konzentrationssimulation. Berlin : Institut für Strömungsmechanik und Technische Akustik, 2008.
16. Pichler, Helmut. Dynamik der Atmosphäre. Heidelberg : Spektrum Akademischer Verlag, 1997.
17. Prof. J. H. Ferziger, Dr. Milovan Peric. Computational Methods for Fluid Dynamics. Berlin : Springer, 2002.
18. Oertel, Herbert. Numerische Strömungsmechanik 2. Auflage. Braunschweig/Wiesbaden : Vieweg, 2003.
19. McCroskey, W. J. A critical assessment of wind tunnel results for the NACA 0012 airfoil. Moffett Fiel, California 94035, USA : U.S. Army Aeroflightdynamics Directorate, 1987.
20. Rumsey, Chris. Turbulence Modeling Resource. 2D NACA 0012 Airfoil Validation Case. [Online] NASA, 10 25, 2011. [Cited: 04 03, 2012.] http://turbmodels.larc.nasa.gov/naca0012_val.html.
21. Jens Trapp, Robert Zores. PPart. NACA 4 Digits Series Profile Generator. [Online] 02 24, 2009. [Cited: 04 02, 2012.] http://www.ppart.de/programming/java/profiles/NACA4.html.
22. Schlichting, H. Grenzschicht - Theorie, 8. Auflage. Karsruhe : Verlag G. Braun, 1982.
23. Ladson, Charles L. NASA TM 4074, Effects of Independent Variation of Mach and Reynolds Numbers on the Low-Speed Aerodynamic Characteristics of the NACA 0012 Airfoil Section. Hampton, Virginia, USA : NASA, 1988.
24. CD-adapco. User Guide StarCCM+ Version 6.04.016. New York : CD-adapco, 2011.

78
8. ANHANG
ISAF INTERNATIONAL CLASS RULES A-CLASS CATAMARAN
The A Class Catamaran is controlled by the rules set down by the ISAF under the "Rules for the Divisions of Catamarans and The International C Class" (last issued May 1985) which are as follows:
1. A catamaran is defined as a two-hulled sailing boat with essentially duplicate or mirror image hulls, fixed in parallel positions.
2. Sail area shall not be more than 13.94 square metres (150 square feet) Sail area to be measured in accordance with the"IYRU Measurement & Calculation of Sail Area Instructions" (last issued May 1985).
3 The overall length of the catamaran shall not be more than 5.49 metres (18 feet). The length shall be measured between perpendiculars to the extremities of the hulls with the catamaran in her normal trim. The measurement shall be taken parallel to the centre line of the craft and shall exclude rudder hangings, but if the athwart ships width of a rudder within 153mm (6 inches) of the bottom of the hull is more than 76mm (3 inches), the length shall be taken to the aftermost point of the rudder.
4. The extreme beam shall not be more than: 2.3 metres (7 ft 6½ inches). The beam shall be measured at right angles to the centre line of the craft at the widest point and including all fixed or adjustable apparatus with the exception of a normally accepted trapeze or retractable seat.
This rule was added to at the 2006 WGM, and re-affirmed at the 2007 WGM, as follows:
Adjustable apparatus such as centreboards must be measured both completely down and completely up flush with the bottom of the hull.
In addition, no part of each hull or the respective fixed or adjustable apparatus shall come closer together than 1.5 metres below the static waterline. If necessary the static water line shall be found by floating the boat fully equipped without the sailor on board.
The drawing below illustrates this rule.

79
5. The crew in Division "A" shall be one person (helmsperson).
6. An unballasted retractable seat or trapeze shall be allowed for the helmsperson. When in use the helmsperson at all times shall have at least one foot in contact with the boat.
7. The A Division emblem shall be carried on the mainsail and shall consist of the letter "A" over two parallel horizontal lines over national letters and sail numbers. Sail numbers shall be allotted by the National Authority or Class Association appointed by the National Authority. The class emblem, national letters and distinguishing numbers shall be placed as prescribed in the Racing Rules of Sailing (RRS 77 & RRS Appendix G).
The following rule was passed by ballot in 15th August 2001 to take effect from 1st January 2002:
8. Hydrofoils are not permitted.
The following rule was passed by ballot 28th February1998 and will take effect from 1st April 1998:
9. Minimum weight in full sailing trim shall be not less than 75 kilograms.

80
2D RESULTAT
Abbildung 8-1 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 4.5 m/s AWS
Abbildung 8-2 Vergleich der Krafterzeugung von 2D Flügelschnitten bei 16 m/s AWS
5.00
10.00
15.00
20.00
25.00
30.00
0 10 20 30 40 50 60 70
Vort
riebs
kraf
t in
Kurs
richt
ung
bei 4
5° A
WA
[N]
Versuchsnummer
Vergleich der Vortriebskrafterzeugung von 2D Flügelschnitten bei AWS 4.5 m/s
6th Series
8th Series
10th Series
12th Series
50.00
100.00
150.00
200.00
250.00
300.00
350.00
0 10 20 30 40 50 60 70
Vort
riebs
kraf
t in
Kurs
richt
ung
bei 4
5° A
WA
[N]
Versuchsnummer
Vergleich der Vortriebskrafterzeugung von 2D Flügelschnitten bei AWS 16 m/s
6th Series
8th Series
10th Series
12th Series

81
3D GITTERNETZSTUDIE
Abbildung 8-3 Wing_10_3_12_0013_2 Gitter
Abbildung 8-4 Wing_10_3_12_0011_2 Gitter

82
Abbildung 8-5 Wing_10_3_12_0008_2 Gitter
Abbildung 8-6 Wing_10_3_12_0012_2 Gitter

83
3D UNTERSUCHUNG
Abbildung 8-7 Vergleich der Vortriebskraftkoeffizienten bei 4.5 m/s AWS
Abbildung 8-8 Vergleich der Vortriebskraftkoeffizienten bei 16 m/s AWS
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00
0 10 20 30 40 50 60
Vort
riebs
kraf
tkoe
ffizi
ent b
ei 4
5° A
WA
Versuchsnummer
Vergleich der 2D und 3D Simulation anhand der Vortriebskrafterzeugung bei AWS 4.5 m/s
2D 6°
2D 8°
2D 10°
2D 12°
Best of 2D
3D
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
0 10 20 30 40 50 60 Vort
riebs
kraf
tkoe
ffizi
ent b
ei 4
5° A
WA
Versuchsnummer
Vergleich der 2D und 3D Simulation anhand der Vortriebskrafterzeugung bei AWS 16 m/s
2D 6°
2D 8°
2D 10°
2D 12°
Best of 2D
3D

84
VERZEICHNISSTRUKTUR DER BEIGEFÜGTEN CD

85
Hiermit versichere ich, dass ich die vorliegende Arbeit selbständig und ohne Benutzung anderer als der hier angegebenen Hilfsmittel angefertigt habe. Alle Stellen, die wörtlich oder sinngemäß aus veröffentlichten und nicht veröffentlichten Schriften entnommen sind, wurden als solche kenntlich gemacht.
Berlin, 24.05.2012
Florin Boeck