kurzbeschreibung der projekte - msw · rechner und ein webbrowser. ... - wie funktioniert sie? ......
TRANSCRIPT
Projektvernissage 2017
Kurzbeschreibung der Projekte

Projekte 2017
2
Projektvernissage 2017 Zum zweiten Mal finden die Mechatronik Erlebnistage der MSW statt. Das Ziel aller Veranstaltungen, die im Rahmen dieser Tage stattfinden, ist es, das Interesse für Technik und die Berufe, welche wir ausbilden, zu wecken. So auch an der Projektvernissage, welche den Abschluss der Projektarbeit im 4. Bildungsjahr an der Berufsfachschule darstellt. Die Lernenden präsentieren ihre Projekte vor einer Jury und das Siegerprojekt in jedem Beruf wird gekürt. Wir als Lehrwerkstatt möchten, dass unsere Projekte den Lernenden aus dem 4. Lehrjahr die Möglichkeit eröffnen, zum Abschluss ihrer Lehrzeit, so viel wie möglich von dem, was sie gelernt haben, in einem Projekt anzuwenden. Selbständig, projektbezogen, zielorientiert. Diese Broschüre zeigt eindrücklich das ganze Spektrum der Kompetenzen, welche unsere Lernenden in den 4 Jahren ihrer Ausbildung bei uns erworben haben. Herzliche Gratulation allen Lernenden zu dieser tollen Leistung! Wir freuen uns auf viele Besucher an der Projektvernissage am 12. Mai 2017, ab 16 Uhr an der Zeughausstrasse 56. Christoph Ammeter Abteilungsleiter Berufsfachschule

3
Inhaltsverzeichnis:
Projekte Automation .................................................................... 4Projekte Elektronik .................................................................... 20Projekte Polymechanik .............................................................. 40

Projekte 2017
4
Projekte Automation Projektbegleiter:
Michael Screta Matthias Furrer

5
Klassenfoto Lehrlingslager Lenzerheide 2013

Projekte 2017
6
Projekt: Cocktail-o-Mat
7
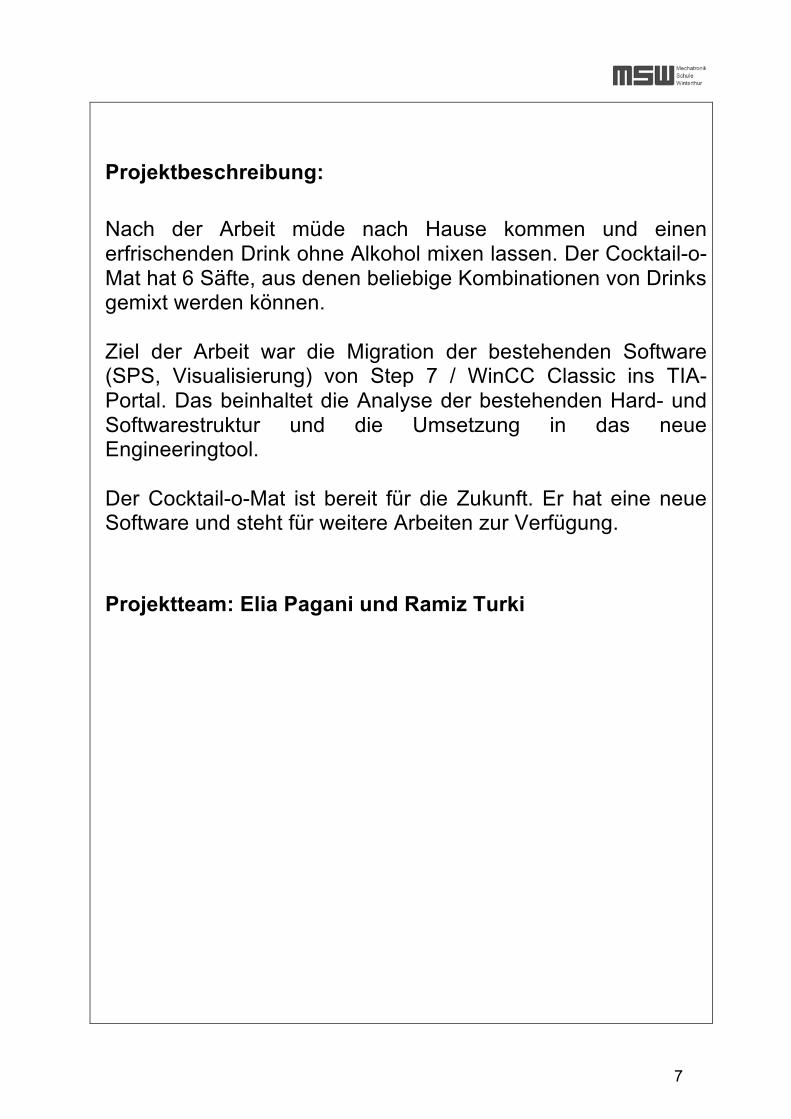
Projektbeschreibung: Nach der Arbeit müde nach Hause kommen und einen erfrischenden Drink ohne Alkohol mixen lassen. Der Cocktail-o-Mat hat 6 Säfte, aus denen beliebige Kombinationen von Drinks gemixt werden können. Ziel der Arbeit war die Migration der bestehenden Software (SPS, Visualisierung) von Step 7 / WinCC Classic ins TIA-Portal. Das beinhaltet die Analyse der bestehenden Hard- und Softwarestruktur und die Umsetzung in das neue Engineeringtool. Der Cocktail-o-Mat ist bereit für die Zukunft. Er hat eine neue Software und steht für weitere Arbeiten zur Verfügung. Projektteam: Elia Pagani und Ramiz Turki
Projekte 2017
8
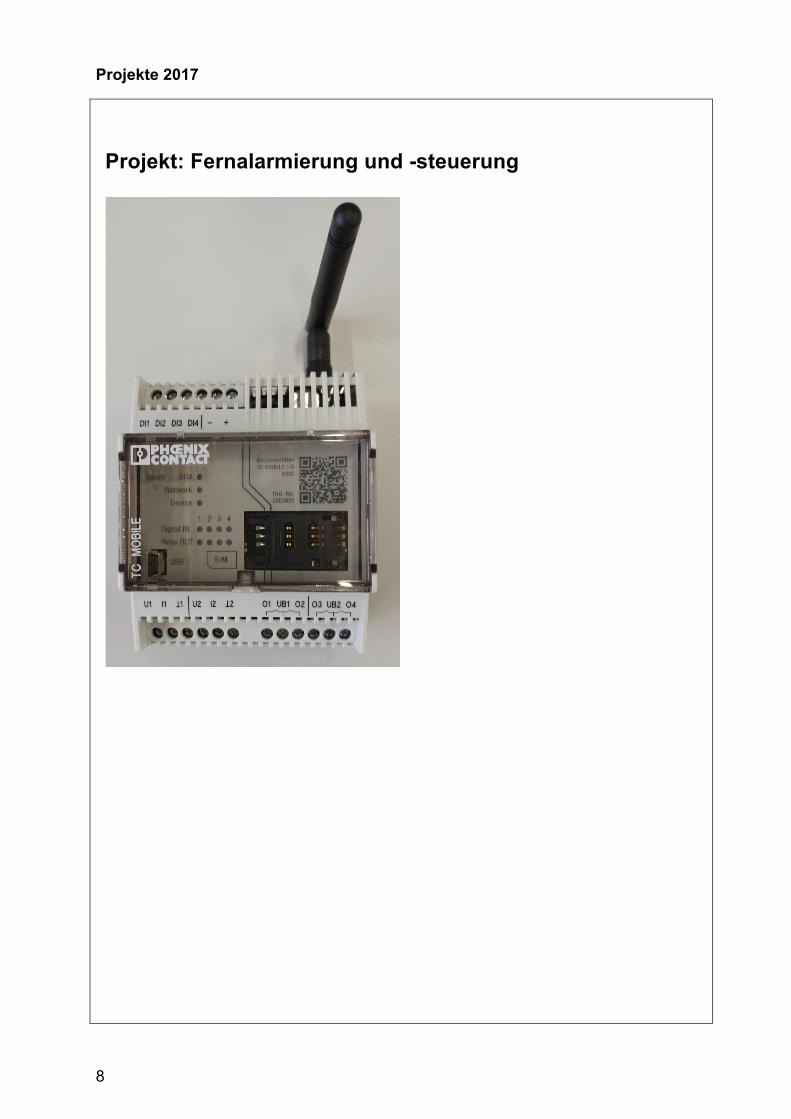
Projekt: Fernalarmierung und -steuerung

9
Projektbeschreibung: Das kompakte Meldesystem TC MOBILE I/O X200 dient dazu, über das Mobilfunk-Netz analoge und digitale Werte zu überwachen sowie Relais-Ausgänge aus der Ferne zu schalten. Zum Konfigurieren reicht eine USB-Verbindung zu einem Rechner und ein Webbrowser. Das Gerät besitzt viele hilfreiche Software-Funktionen, wie zum Beispiel die Mobilfunk-Diagnose und einen Logbuch-Versand via E-Mail. Projektteam: David Scheuch

Projekte 2017
10
Projekt: Gebäudeautomation

11
Projektbeschreibung: - Was ist Hausautomation? - Was benötigt man für eine solche Installation? - Wie funktioniert sie? - Was ist dabei zu beachten? Gerne würden wir zu Hause unser Heim automatisieren, wissen jedoch nicht so recht wo anfangen. Mit dieser Arbeit wurde der Grundstein dazu gelegt. Anhand zweier Storen und Beleuchtung wird exemplarisch eine Möglichkeit für die Automation aufgezeigt. Der Storen wird abhängig der Tageszeit und Windstärke gesteuert, das Licht ist abhängig von der Helligkeit. Technologisch ist die klassische Automation mit dem Gebäutetechnikbus KNX verbunden worden. Projektteam: Yanik Imark und Oliver Schink

Projekte 2017
12
Projekt: Positionsmodell
13
Projektbeschreibung: Industrie 4.0 an der MSW ist die Zukunft. Damit im Unterricht an realen und auch interessanten Modellen gearbeitet werden kann, wurde dieses Modell geschaffen. Die Steuerungs- und Antriebstechnik vereint, wobei mit der Antriebstechnik die Technologie Frequenzumformer und Servoantrieb verwendet werden. Mit diesem Modell ist es möglich, eine Positionierachse auf folgende Parameter anzusteuern: Position, Geschwindigkeit, Beschleunigung und Ruck. Projektteam: Patrick Bühler und Daniel Ernst

Projekte 2017
14
Projekt: Hochregallager
Lade- und Entladestation
Schaltschrank
Touchpanel
Servomotor
Greifer
LineareinheitLift
15
Projektbeschreibung: Am Hochregallager kann Vebrauchsmaterial (z.B. Schrauben) in entsprechenden Regalen verstaut und wieder abgeholt werden Dies erfolgt durch einen Servomotor für den Liftantrieb, Schrittmotoren für den Greifer und einer Ein-/Ausladestation auf einem Stockwerk. Die grundlegende Funktion der Anlage ist die Simulation eines Hochregallagers. Dieses Lager besitzt vier Etagen und pro Etage stehen vier Lagerplätze zur Verfügung, wobei eine Etage mit einer Lade- und Entladestation ausgestattet ist. Somit hat das Lager ein maximales Fassungsvermögen von 14 Positionen. Die Lade- und Entladestationen können gleichzeitig von zwei Paletten besetzt werden. So können mehrere Auslagerungs- bzw. Einlagerungsbefehle bearbeitet werden. Die Bedienung der Anlage erfolgt über ein Touchpanel. Projektteam: Helvjis Kiselis und Joel Wickli
Projekte 2017
16
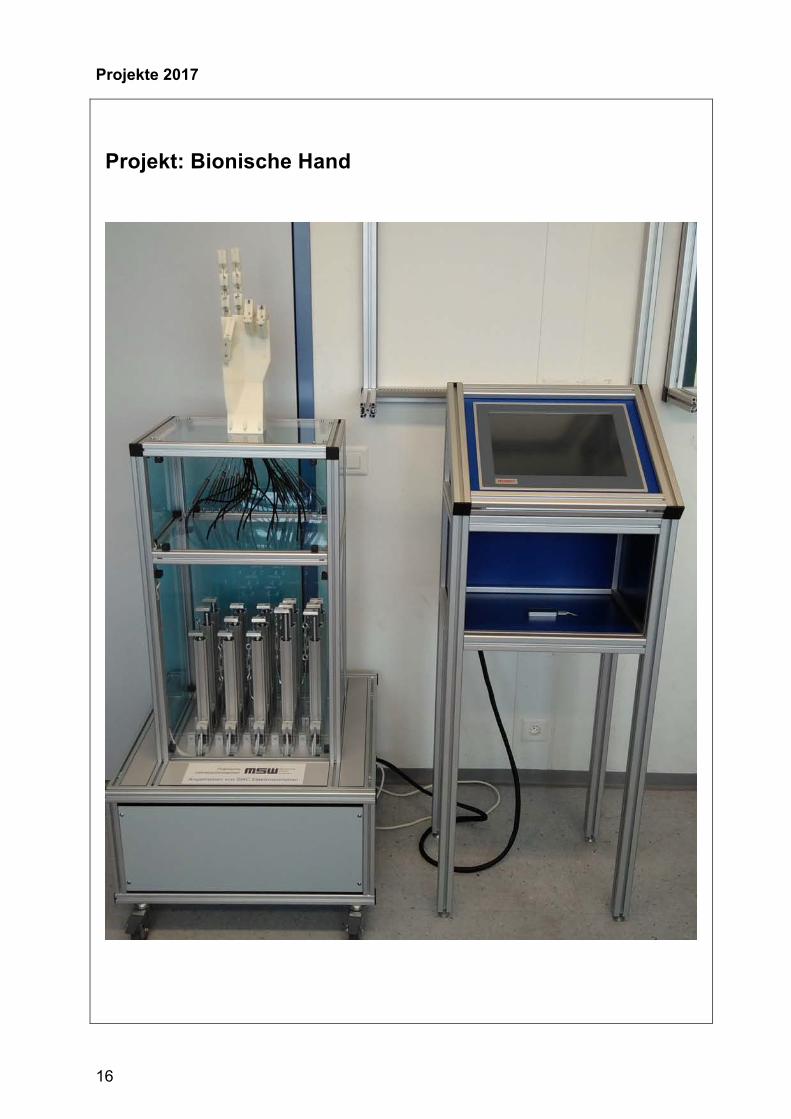
Projekt: Bionische Hand
17
Projektbeschreibung:
Traditionellerweise erfolgt die Bedienung von Maschinen über ein abstraktes Interface. Beispiele dafür sind Bedienplatten mit Tastern, Touchpanels oder Joysticks. Bei modernen Robotern gewinnt die Verschmelzung zwischen Mensch und Maschine jedoch immer mehr an Bedeutung. Ein wichtiger Bestandteil davon ist die Entwicklung von innovativen Bedienmethoden. Die Bedienung sollte so einfach sein wie das Steuern des eigenen Körpers und dabei alle Vorteile der Maschine zugänglich machen. Unsere Zielsetzung ist es, die Handbewegungen des Benutzers möglichst genau an einer mechanischen Hand umzusetzen. Die Wahl der Hand entstand aus zwei Gründen: Einerseits konnten wir ein Projekt übernehmen, bei dem unsere Vorgänger ein funktionsfähiges Modell einer menschlichen Hand entwickelten. Andererseits ist die Hand der komplexeste Teil des Körpers. Dadurch sollte man die gefundenen Erkenntnisse problemlos auf andere Körperteile anwenden können, wie beispielsweise die Arme. Projektteam: Florian Ulmschneider und Yannis Müri
Projekte 2017
18
Projekt: Roboterschulung
19
Projektbeschreibung:
Unser Hauptziel, ist die Vermittlung der Informationen über die Roboterzelle an Drittpersonen. Wir mussten uns als Team gemeinsam in das Thema einarbeiten. Jemand befasste sich mit der Dokumentation und den Anleitungen von dem Aufbau der Roboterzelle. Diese Person setzte sich mehr mit der Hardware der Roboterzelle auseinander. Die andere Person vertieft sich in die Programmierung und deren Handbücher. In einer ersten Phase erstellten wir eine Ausbildungssequenz für unsere Kollegen im vierten Lehrjahr. In einer zweiten Phase erstellen wir eine weitere Ausbildungssequenz für die Berufsgruppe der PolymechanikerInnen. Dazu kreierten wir einen Grobplan und einen Feinplan mit den entsprechenden Anleitungen. Dieser Kurs wird demnächst durchgeführt.
Projektteam: Katja Dällenbach und David Mettler
Projekte 2017
20
Projekte Elektronik Projektbegleiter:
Christian Riedel Peter Trüb
21
Klassenfoto Lehrlingslager Lenzerheide 2013

Projekte 2017
22
Projekt: Aragog

23
Projektbeschreibung: Sie krabbelt. Sie hat 6 Beine. Ein spinnenartiger Roboter. Aragog. Der Name stammt von der Spinne aus Harry Potter. Sie kann entweder selbstständig vorgegebene Abläufe vorzeigen oder über ein Samsung-Tablet mittels Bluetooth (Drahtlos-Verbindung) ferngesteuert Bewegungen ausführen. Die Anwendung dazu wurde eigens dazu geschrieben. Damit die Beine authentisch wirken besitzt jedes einzelne 3 Motoren. Jeweils 1 für das “Knie“ und 2 für die “Hüfte“. Gesamt 18 Motoren die einzeln angesteuert werden. Projektteam: Tobias Hofmann und Julian Witzig

Projekte 2017
24
Projekt: BB8 Replica

25
Projektbeschreibung: Ziel des Projektes war es eine Nachbildung des Roboter BB8 aus dem neuen Starwars-Film zu entwickeln. Das Besondere an diesem Roboter ist dabei, dass er eine Kugel ist und um sich fortzubewegen herumrollt. Die Arbeit fand in Zusammenarbeit mit den Polymechanikern Hesron Baskaran und Gianluca Keller statt, welche zuständig für die Mechanik waren. Der Roboter ist über eine App fernsteuerbar und kann verschiedene Pieptöne von sich geben.
Projektteam: Tilo Madöry und Patrick Burkhalter Zusammen mit den Polymechanikern Gianluca Keller und Hesron Baskaran

Projekte 2017
26
Projekt: RGB-Cloud

27
Projektbeschreibung: Unser Ziel ist es ein leuchtendes Wolkenmodell mit 300 LEDs zu kreieren, welche die Farben wechseln können. Ausserdem, sollte sie mit Hilfe von Licht- und Soundeffekten ein Gewitter simulieren können. Die Wolke ist per Bluetooth über eine App steuerbar. In der App sollte man die Farbe jeder LED einzeln ändern oder auf die Sensorsteuerung umschalten können. Projektteam: Jonas Eichenberger, Nathan Brugger und Robin Bühler

Projekte 2017
28
Projekt: Der Sequenzer
29
Projektbeschreibung: Wollen sie eigene Musik machen? Wir entwickeln als Projekt einen Sequenzer. Nun was ist dies genau? Einfach gesagt ein Melodiengenerator, im Zusammen-spiel mit einem Klanggenerator (Synthesizer) sind zeitliche Abläufe mit verschiedenen Tonhöhen und Rhythmen generierbar. Der Sequenzer selbst hat keine Klangerzeugung er dient lediglich als Steuermodul und gibt somit am Schluss Steuersignale aus.
Projektteam: Lauri Meyer und Michael Hofsetter

Projekte 2017
30
Projekt: Forceplate

31
Projektbeschreibung: Die Force-Plate besteht aus einer Grundplatte, auf der vier verschiedene kleine Platten angebracht sind. Diese Platten funktionieren als Kondensatoren. Je nachdem, wie die verschieden Platten belastet werden entsteht eine andere Kapazität. Die verschiedenen Belastungswerte werden über eine bestimmte Zeit gemessen und dann auf ein Tablet ausgegeben. Die verschiedenen Belastungswerte werden je nach Druckstärke in eine Farbe eingeteilt. Somit kann die Belastung der Druckplatte gemessen und in eine Druckstärke eingeteilt werden.
Projektteam: Yann Schütz und Dario Generoso

Projekte 2017
32
Projekt: Lucy

33
Projektbeschreibung: Unsere Projektarbeit besteht darin, eine tragbare LED-Laterne zu entwickeln, die, mit einer Smartphone-App, über Bluetooth gesteuert werden kann. Mit der App kann jede Farbe ausgewählt und auf der Laterne wiedergeben werden. Für uns steht die Sensortechnik im Vordergrund und darum sind ein Helligkeits- und ein «Klatsch-» Sensor nur zwei der eingebauten Sensoren. Die Laterne ist mit Akkus ausgestattet und wird mit diesen betrieben. Dafür wurde die ganze Elektronik entwickelt, das Gehäuse bearbeitet, und teilweise 3D-gedruckt, eine App programmiert und der Programm-Code für den Micro Controller geschrieben. Projektteam: Michael Wyss und Jonathan Vogt
Projekte 2017
34
Projekt: Poltergeist
35
Projektbeschreibung: Unser Ziel war es, eine fernsteuerbare Überwachung zu entwickeln, um u.a. zuhause oder in der Ferienwohnung Einbrecher bzw. Mitbewohner mit unserer scheinbaren Präsenz zu täuschen (Poltergeist). Dies wollten wir mit einem Wifi-Chip und einem selbst angefertigten Mikrokontroller-Board realisieren. Das Gerät wird über ein Netzteil betrieben. Über das Internet soll man Licht ein- und ausschalten, Ton erzeugen oder über einen Lautsprecher Musik laufen lassen können, den Rauchgehalt im Zimmer messen (Rauchmelder) und überwachen, ob jemand klingelt oder ob sich jemand im Zimmer bewegt. Weiterhin lässt sich der Aufbau noch beliebig erweitern, z.B. in Richtung Hausüberwachung- und Steuerung (Wunschziele). Der Poltergeist kommt in eine Holzkiste z.B. eine Zigarrenschachtel wie im Bild. Projektteam: Yannick Meyer und Jessica Eichhorn

Projekte 2017
36
Projekt: Quadrocopter
37
Projektbeschreibung: Unsere Projektarbeit bestand darin, einen Quadrocopter inkl. Steuerung via Smartphone von Grund auf selbst zu entwickeln. Zudem designten wir ein passendes Skelett bzw. Gestell für den Quadrocopter, welches wir mit einem eigenen 3D-Drucker herstellten. Um dieses Ziel zu erreichen, mussten wir die Hardware entwickeln und einen Mikrocontroller in der Programmiersprache C programmieren. Die Applikation für die Steuerung auf dem Smartphone wurde in Java programmiert. Projektteam: Marius Nicklaus und Roman Haldenstein
Projekte 2017
38
Projekt: Visual-Poi

39
Projektbeschreibung: Pois sind im Prinzip zwei Gewichte, die an je einer Schnur angemacht sind. Man hält je ein Poi in einer Hand und schwingt diese in fliessenden Bewegungen um sich. Es gibt verschiedene Poi-Variationen, wie zum Beispiel Feuer-Pois, Funken-Pois, oder eben Visual-Pois. Bei denen werden die Gewichte durch LED-Streifen ersetzt, dadurch können durch die Schwing-Bewegungen Muster dargestellt werden. Wir verwenden RGB-LED-Streifen, da man damit vielfältigere Muster darstellen kann.
Projektteam: Alexis Doll und Simon Pfiffner

Projekte 2017
40
Projekte Polymechanik Projektbegleiter:
Martin Frei André Bitzer

41
Klassenfoto Lehrlingslager Lenzerheide 2013
Projekte 2017
42
Projekt: BB8 Replica

43
Projektbeschreibung: Wir haben vor einen BB8 Replica zu machen, damit dieser in einer Vorwärts oder Rückwärtsbewegung immer horizontal steht bleibt. Durch einen Elektromotor sollen die Räder im Innern der Kugel in Bewegung gesetzt werden. Zu beachten ist, dass der Schwerpunkt tief in der Kugel lieg so, dass er effektiv rollt. Projektteam: Gianluca Keller und Hesron Baskaran Zusammen mit den Elektronikern Tilo Madöry und Patrick Burkhalter

Projekte 2017
44
Projekt: Rolling Retro
45
Projektbeschreibung: Zu Beginn war gedacht, dass die Projektgruppe selber ein Paar anschnallbare Rollschuhe konstruiert und fertigt. Wegen unvorhersehbaren Ereignissen ist die Fertigung nicht mehr ein realistisches Ziel. Daher habe ich beschlossen, mich auf das digitale Erarbeiten des Projektes zu konzentrieren. Die digital vorhandenen Dateien sollen so ausgearbeitet werden, dass sie als fertiges Konzept erkannt werden können. Die Präsentation meiner gemachten Arbeit steht im Vordergrund und mit einem neuem SolidWorks Tool werde ich mein digitales Modell speziell vorzeigen können. Kernkompetenzen: - Konstruktion (SolidWorks) - Marketing (Vorzeigemodell für Verkaufszwecke/eDrawing) - Nachvollziehbare Dokumentation
Projektteam: Alexander McTigue und Jannes Jucker

Projekte 2017
46
Projekt: Tiltomat

47
Projektbeschreibung: Wir wollen ein Neigelabyrinth herstellen, mit dem man auf dem Handy ein Labyrinth spiel spielen kann. Wir wollen die Achsen elektrisch ansteuern, sodass man das Spiel mit einem Joystick spielen kann. Wir wollen den sogenannten Tiltomat aus 3 verschiedenen Werkstoffen herstellen. aus Aluminium, Stahl und Messing. Es muss mit dem I-Phone 6 spielbar sein.
Kernkompetenzen:
1. Fräsen 2. Konstruktion 3. Werkstofftechnik
Projektteam: Julian Staub und Pascal Meier

Projekte 2017
48
Projekt: Cool Book
49
Projektbeschreibung: Das Ziel unseres Projektes ist es, einen Laptophalter herzustellen, der den Laptop im Bett, auf dem Schoss, sowie als auch auf dem Tisch in der perfekten Stellung hält. Gleichzeitig bauen wir noch einen Kühler ein, der den Laptop vor Überhitzung schützt. Projektteam: Haris Ademi und Valmir Rrudhani
Projekte 2017
50
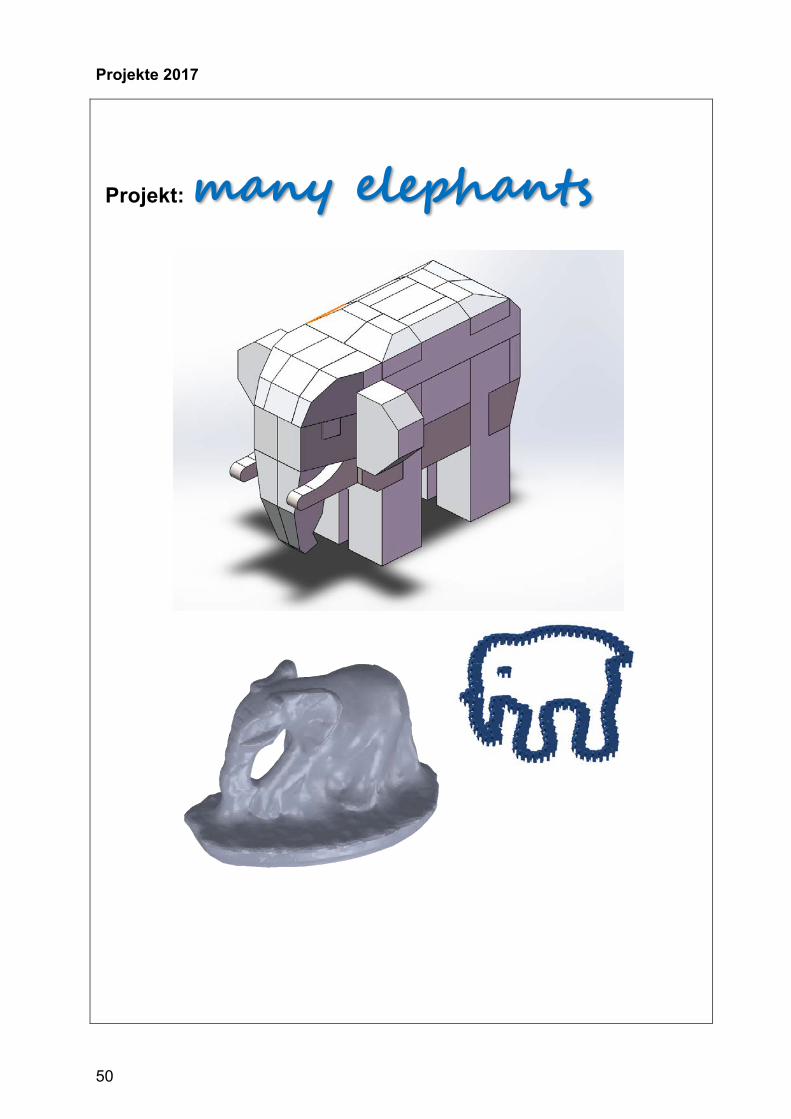
Projekt: many elephants

51
Projektbeschreibung: Spannabhebende Bearbeitung und Additiv Manufacturing unterstützt durch geeignete Soft- und Hardwareprodukte ergibt die Basis für die Fortführung einer klassischen Lehrarbeit in digitalen Form. Der Elefant mit seinem starken Charakter eignet sich aufgrund seiner klaren Form besonders zur Nachahmung. Das Projekt many elephants liefert die notwendigen Grundlagen zukünftige Lernende zu bilden. Die Möglichkeiten des Einsatzes als Montageübung oder Lehrarbeit zeichnen den Elefanten als vielfältiges Arbeitstier aus. Er transportiert Wissen und schafft ein weites Betätigungsfeld. Welches durch die fortschreitende Modernisierung immer wichtiger wird. Projektteam: Sirius Vollenweider und Stefan Stankovic

MSW Mechatronik Schule Winterthur Zeughausstrasse 56 CH-8400 Winterthur