lectia iii produsul scalar a doi vectori liberi -...
TRANSCRIPT

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Lectia III
Produsul scalar a doi vectori liberi
Oana Constantinescu
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Table of Contents
1 Produsul scalar: de�nitie, proprietati
2 Schimbari de repere ortonormate in plan
3 Aplicatii
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
De�nitia produsului scalar
De�nition
Fie vectorii liberi nenuli u, v ∈ V. Produsul scalar al celor doi
vectori se noteaza cu < u, v > (sau (u, v), u · v) si se de�neste prin
< u, v >= |u||v | cosα,
unde α este masura unghiului celor doi vectori, α ∈ [0, π]. Dacaunul dintre vectori este 0, produsul lor scalar este prin de�nitie 0.
Observatie: numele acestui produs de vectori vine din faptul ca
rezultatul este un scalar real.
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
De�nitia produsului scalar
De�nition
Fie vectorii liberi nenuli u, v ∈ V. Produsul scalar al celor doi
vectori se noteaza cu < u, v > (sau (u, v), u · v) si se de�neste prin
< u, v >= |u||v | cosα,
unde α este masura unghiului celor doi vectori, α ∈ [0, π]. Dacaunul dintre vectori este 0, produsul lor scalar este prin de�nitie 0.
Observatie: numele acestui produs de vectori vine din faptul ca
rezultatul este un scalar real.
Oana Constantinescu Lectia III

De�nitia produsului scalar
Observatie: unghiul dintre cei doi vectori este unghiul dintre
directiile lor, si nu depinde de punctul in care se aplica vectorii.

Interpretare geometrica
O interpretare geometrica importanta a produsului scalar este
data de proiectia ortogonala a unui vector pe o directie data.
Fie d o dreapta cu directia data de u si v =−→AB. Fie A′ si B ′
intersectiile dintre dreapta d si planele prin A, respectiv B,perpendiculare pe d .

Interpretare geometrica
O interpretare geometrica importanta a produsului scalar este
data de proiectia ortogonala a unui vector pe o directie data.
Fie d o dreapta cu directia data de u si v =−→AB. Fie A′ si B ′
intersectiile dintre dreapta d si planele prin A, respectiv B,perpendiculare pe d .

Proiectia ortogonala
Vectorul−−→A′B ′ = w se numeste proiectia ortogonala a lui v pe
d si se noteaza cu prdv sau pruv .
Proiectia ortogonala
Observatie: in cazul geometriei plane, cele doua plane ortogonale
pe d sunt inlocuite de drepte ortogonale pe d , prin A, respectiv B .
Marimea algebrica a vectorului pruv se noteaza cu mpruv si se
numeste masura proiectiei.
Mai exact, daca u0 este versorul lui u, adica u0 = u
|u| , atuncipruv = λu, λ ∈ R. Notam λ = mpruv .
Se observa usor pe �gura anterioara ca
mpruv = |v | cosα,
unde α ∈ [0, π] este masura unghiului dintre v si u.

Proiectia ortogonala
Observatie: in cazul geometriei plane, cele doua plane ortogonale
pe d sunt inlocuite de drepte ortogonale pe d , prin A, respectiv B .
Marimea algebrica a vectorului pruv se noteaza cu mpruv si se
numeste masura proiectiei.
Mai exact, daca u0 este versorul lui u, adica u0 = u
|u| , atuncipruv = λu, λ ∈ R. Notam λ = mpruv .
Se observa usor pe �gura anterioara ca
mpruv = |v | cosα,
unde α ∈ [0, π] este masura unghiului dintre v si u.

Proiectia ortogonala
Observatie: in cazul geometriei plane, cele doua plane ortogonale
pe d sunt inlocuite de drepte ortogonale pe d , prin A, respectiv B .
Marimea algebrica a vectorului pruv se noteaza cu mpruv si se
numeste masura proiectiei.
Mai exact, daca u0 este versorul lui u, adica u0 = u
|u| , atuncipruv = λu, λ ∈ R. Notam λ = mpruv .
Se observa usor pe �gura anterioara ca
mpruv = |v | cosα,
unde α ∈ [0, π] este masura unghiului dintre v si u.
Proiectia ortogonala
Urmarind �gura deduceti ca
pru(v + v ′) = pruv + pruv′, mpru(v + v ′) = mpruv + mpruv
′.
Interpretarea geometrica a produsului scalar este
< u, v >= |u|mpruv = |v |mpr vu.

Proprietatile produsului scalar
Theorem
Produsul scalar a doi vectori liberi are urmatoarele proprietati:
a) < u, v >=< v , u > (simetria);
b) < u, v + w >=< u, v > + < u,w >(aditivitatea);
c) < λu, v >= λ < u, v >(omogenitatea);
d) < u, u >> 0, < u, u >= 0⇔ u = 0 (pozitiva de�nire);
e) < u, v >= 0⇔ u ⊥ v ,∀u, v ∈ V si ∀λ ∈ R.Deci produsul scalar este o aplicatie <,>: V × V → R biliniara,
simetrica, avand forma patratica asociata pozitiv de�nita.
Observatie: doi vectori sunt perpendiculari daca au directiile
perpendiculare.

Baze ortonormate
Daca {O; i , j , k} este un reper ortonormat, si vectorii u, v au
urmatoarele coordonate:
u = x1i + x2j + x3k ,
v = y1i + y2j + y3k ,
atunci produsul lor scalar se calculeaza astfel:
< u, v >= x1y1 + x2y2 + x3y3.
De�nition
Norma vectorului liber u este
‖ u ‖=√< u, u >.
Observatie: se veri�ca imediat ca ‖ u ‖= |u|, ∀u ∈ V.

Baze ortonormate
Daca {O; i , j , k} este un reper ortonormat, si vectorii u, v au
urmatoarele coordonate:
u = x1i + x2j + x3k ,
v = y1i + y2j + y3k ,
atunci produsul lor scalar se calculeaza astfel:
< u, v >= x1y1 + x2y2 + x3y3.
De�nition
Norma vectorului liber u este
‖ u ‖=√< u, u >.
Observatie: se veri�ca imediat ca ‖ u ‖= |u|, ∀u ∈ V.

Baze ortonormate
Daca {O; i , j , k} este un reper ortonormat, si vectorii u, v au
urmatoarele coordonate:
u = x1i + x2j + x3k ,
v = y1i + y2j + y3k ,
atunci produsul lor scalar se calculeaza astfel:
< u, v >= x1y1 + x2y2 + x3y3.
De�nition
Norma vectorului liber u este
‖ u ‖=√< u, u >.
Observatie: se veri�ca imediat ca ‖ u ‖= |u|, ∀u ∈ V.

Baze ortonormate
Daca u = x1i + x2j + x3k , atunci norma sa se calculeaza prin
‖ u ‖=√
(x1)2 + (x2)2 + (x3)2,
iar unghiul dintre vectorii liberi u = x1i + x2j + x3k si
v = y1i + y2j + y3k prin
cosα =x1y1 + x2y2 + x3y3√
(x1)2 + (x2)2 + (x3)2√
(y1)2 + (y2)2 + (y3)2.

Proprietatile normei
Theorem
Norma unui vector liber este o aplicatie ‖ · ‖: V → [0,∞), cuproprietatile:
1) ‖ v ‖= 0⇔ v = 0;2) ‖ λv ‖= |λ| ‖ v ‖, ∀v ∈ V, ∀λ ∈ R;3) | < u, v > | ≤‖ u ‖‖ v ‖, ∀u, v ∈ V. Egalitatea are loc daca si
numai daca vectorii sunt coliniari (inegalitatea lui Cauchy);
4) ‖ u + v ‖≤‖ u ‖ + ‖ v ‖, ∀u, v ∈ V. Egalitatea are loc daca si
numai daca vectorii sunt coliniari si de acelasi sens (inegalitatea
triunghiulara).

Cosinusi directori
Theorem
Fie {i , j , k} o baza ortonormata in V si u un vector liber unitar:
‖ u ‖= 1. Daca v face unghiurile α, β, γ respectiv cu vectorii
i , j , k , atunci
u = (cosα)i + (cosβ)j + (cos γ)k .
De�nition
Numerele reale cosα, cosβ, cos γ se numesc cosinii directori ai
directiei vectorului u si satisfac relatia:
cos2 α + cos2 β + cos2 γ = 1
.

Cosinusi directori
Theorem
Fie {i , j , k} o baza ortonormata in V si u un vector liber unitar:
‖ u ‖= 1. Daca v face unghiurile α, β, γ respectiv cu vectorii
i , j , k , atunci
u = (cosα)i + (cosβ)j + (cos γ)k .
De�nition
Numerele reale cosα, cosβ, cos γ se numesc cosinii directori ai
directiei vectorului u si satisfac relatia:
cos2 α + cos2 β + cos2 γ = 1
.
Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
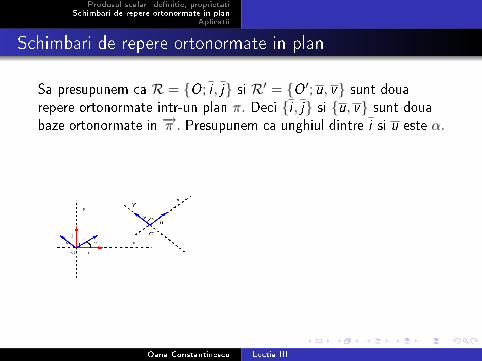
Schimbari de repere ortonormate in plan
Sa presupunem ca R = {O; i , j} si R′ = {O ′; u, v} sunt douarepere ortonormate intr-un plan π. Deci {i , j} si {u, v} sunt douabaze ortonormate in −→π . Presupunem ca unghiul dintre i si u este α.
Oana Constantinescu Lectia III
Schimbari de repere ortonormate in plan
Atunci
u = (cosα)i + (sinα)j ,
v = −(sinα)i + (cosα)j , sau v = (sinα)i − (cosα)j ,
iar formula corespunzatoare a transformarii de coordonate este:
x ′= x cosα + y sinα + a, (1)
y ′= −x sinα + y cosα + b,
sau
x ′= x cosα + y sinα + a, (2)
y ′= x sinα− y cosα + b,
unde am notat cu (x , y) coordonatele in raport cu R, (x ′, y ′)coordonatele in raport cu R′ si am presupus ca O ′ are in raport cu
R coordonatele (a, b).

Schimbari de repere ortonormate in plan
Atunci
u = (cosα)i + (sinα)j ,
v = −(sinα)i + (cosα)j , sau v = (sinα)i − (cosα)j ,
iar formula corespunzatoare a transformarii de coordonate este:
x ′= x cosα + y sinα + a, (1)
y ′= −x sinα + y cosα + b,
sau
x ′= x cosα + y sinα + a, (2)
y ′= x sinα− y cosα + b,
unde am notat cu (x , y) coordonatele in raport cu R, (x ′, y ′)coordonatele in raport cu R′ si am presupus ca O ′ are in raport cu
R coordonatele (a, b).

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Orientarea planului
Pentru a decide care din ecuatiile (1), (2) este cea corecta, trebuie
sa stim cum sunt orientate bazele celor doua repere.
In plan, pentru determinarea sensului unui unghi, suntem obisnuiti
sa folosim sensul acelor ceasornicului si cel trigonometric (invers
acelor de ceas), care sunt, prin conventie, sensul negativ, respectiv
cel pozitiv.
Existenta unghiurilor pozitive si negative determina orientabilitatea
planului, iar alegerea numelor de pozitiv si negativ este numita
orientare.
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Orientarea planului
Pentru a decide care din ecuatiile (1), (2) este cea corecta, trebuie
sa stim cum sunt orientate bazele celor doua repere.
In plan, pentru determinarea sensului unui unghi, suntem obisnuiti
sa folosim sensul acelor ceasornicului si cel trigonometric (invers
acelor de ceas), care sunt, prin conventie, sensul negativ, respectiv
cel pozitiv.
Existenta unghiurilor pozitive si negative determina orientabilitatea
planului, iar alegerea numelor de pozitiv si negativ este numita
orientare.
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Orientarea planului
Pentru a decide care din ecuatiile (1), (2) este cea corecta, trebuie
sa stim cum sunt orientate bazele celor doua repere.
In plan, pentru determinarea sensului unui unghi, suntem obisnuiti
sa folosim sensul acelor ceasornicului si cel trigonometric (invers
acelor de ceas), care sunt, prin conventie, sensul negativ, respectiv
cel pozitiv.
Existenta unghiurilor pozitive si negative determina orientabilitatea
planului, iar alegerea numelor de pozitiv si negativ este numita
orientare.
Oana Constantinescu Lectia III

Orientarea planului
Prin de�nitie, doua baze ale unui plan vectorial sunt la fel orientate
daca determinantul matricii de trecere de la o baza la alta este
strict pozitiv, si opus orientate daca determinantul anterior este
strict negativ. Doua repere sunt la fel orientate daca bazele lor sunt
la fel orientate.
Relatia �la fel orientate� este o relatie de echivalenta pe multimea
bazelor spatiului liniar al vectorilor liberi, si aceasta multime se
imparte in doua clase de echivalenta, disjuncte, astfel incat doua
baze din aceeasi clasa sunt la fel orientate, iar doua baze din clase
distincte sunt opus orientate.

Orientarea planului
Prin de�nitie, doua baze ale unui plan vectorial sunt la fel orientate
daca determinantul matricii de trecere de la o baza la alta este
strict pozitiv, si opus orientate daca determinantul anterior este
strict negativ. Doua repere sunt la fel orientate daca bazele lor sunt
la fel orientate.
Relatia �la fel orientate� este o relatie de echivalenta pe multimea
bazelor spatiului liniar al vectorilor liberi, si aceasta multime se
imparte in doua clase de echivalenta, disjuncte, astfel incat doua
baze din aceeasi clasa sunt la fel orientate, iar doua baze din clase
distincte sunt opus orientate.

Orientarea planului
Impartirea in cele doua clase se face astfel: se �xeaza o baza
ortonormata oarecare (i , j) si �e o alta baza ortonormata (i′, j′). Se
roteste i′cu un anumit unghi α ∈ [0, π] pana cand acesta ajunge
peste i . Daca rotatia pozitioneaza si vectorul j ′ peste j , atunci�asezam� baza (i
′, j′) in clasa nr. 1. Daca nu, o punem in clasa nr.
2.
A alege una dintre aceste clase drept clasa bazelor orientate pozitiv
inseamna a orienta spatiul liniar V.Deci se obtine formula (1) pentru repere la fel orientate si formula
(2) pentru repere opus orientate.

Orientarea planului
Impartirea in cele doua clase se face astfel: se �xeaza o baza
ortonormata oarecare (i , j) si �e o alta baza ortonormata (i′, j′). Se
roteste i′cu un anumit unghi α ∈ [0, π] pana cand acesta ajunge
peste i . Daca rotatia pozitioneaza si vectorul j ′ peste j , atunci�asezam� baza (i
′, j′) in clasa nr. 1. Daca nu, o punem in clasa nr.
2.
A alege una dintre aceste clase drept clasa bazelor orientate pozitiv
inseamna a orienta spatiul liniar V.Deci se obtine formula (1) pentru repere la fel orientate si formula
(2) pentru repere opus orientate.

Orientarea planului
Impartirea in cele doua clase se face astfel: se �xeaza o baza
ortonormata oarecare (i , j) si �e o alta baza ortonormata (i′, j′). Se
roteste i′cu un anumit unghi α ∈ [0, π] pana cand acesta ajunge
peste i . Daca rotatia pozitioneaza si vectorul j ′ peste j , atunci�asezam� baza (i
′, j′) in clasa nr. 1. Daca nu, o punem in clasa nr.
2.
A alege una dintre aceste clase drept clasa bazelor orientate pozitiv
inseamna a orienta spatiul liniar V.Deci se obtine formula (1) pentru repere la fel orientate si formula
(2) pentru repere opus orientate.

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Aplicatii
Example
Formulati si demonstrati teorema cosinusului intr-un triunghi
oarecare, apoi aplicati-o pentru a obtine teorema medianei.
Amintim ca, daca notam cu a, b, c lungimile laturilor triunghiului
ABC , opuse varfurilor A, B, respectiv C , atunci teorema
cosinusului a�rma:
a2 = b2 + c2 − 2bc cos A.
Indicatii: a2 =‖−→BC ‖2=‖
−→BA +
−→AC ‖2=‖
−→BA ‖2 + ‖
−→AC ‖2
+2 <−→BA,−→AC >= b2 + c2 − 2 <
−→AB,−→AC >= b2 + c2 − 2bc cos A.
Oana Constantinescu Lectia III

Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Aplicatii
Example
Formulati si demonstrati teorema cosinusului intr-un triunghi
oarecare, apoi aplicati-o pentru a obtine teorema medianei.
Amintim ca, daca notam cu a, b, c lungimile laturilor triunghiului
ABC , opuse varfurilor A, B, respectiv C , atunci teorema
cosinusului a�rma:
a2 = b2 + c2 − 2bc cos A.
Indicatii: a2 =‖−→BC ‖2=‖
−→BA +
−→AC ‖2=‖
−→BA ‖2 + ‖
−→AC ‖2
+2 <−→BA,−→AC >= b2 + c2 − 2 <
−→AB,−→AC >= b2 + c2 − 2bc cos A.
Oana Constantinescu Lectia III
Produsul scalar: de�nitie, proprietatiSchimbari de repere ortonormate in plan
Aplicatii
Aplicatii
Example
Formulati si demonstrati teorema cosinusului intr-un triunghi
oarecare, apoi aplicati-o pentru a obtine teorema medianei.
Amintim ca, daca notam cu a, b, c lungimile laturilor triunghiului
ABC , opuse varfurilor A, B, respectiv C , atunci teorema
cosinusului a�rma:
a2 = b2 + c2 − 2bc cos A.
Indicatii: a2 =‖−→BC ‖2=‖
−→BA +
−→AC ‖2=‖
−→BA ‖2 + ‖
−→AC ‖2
+2 <−→BA,−→AC >= b2 + c2 − 2 <
−→AB,−→AC >= b2 + c2 − 2bc cos A.
Oana Constantinescu Lectia III

Aplicatii
Notam cu D mijlocul laturii (BC ) si cu ma lungimea medianei
(AD).
Atunci m2a = (1
2‖−→AB +
−→AC ‖)2 ⇒4m2
a =‖−→AB ‖2 + ‖
−→AC ‖2
+ 2 <−→AB,−→AC > . Folosind de�nitia produsului<
−→AB,−→AC > in
care se inlocuieste cos A din teorema cosinusului, se obtine
4m2
a = 2(b2 + c2)− a2.

Aplicatii
Example
Fie B = (i , j , k) o baza ortonormata in V.a) Sa se determine α ∈ R astfel incat vectorii a = αi − 3j + 2k si
b = i + 2j − αk sa �e perpendiculari.
b) Sa se determine unghiul dintre vectorii a = 2i − 4j + 4k si
b = −3i + 2j + 6k .c) Sa se determine vectorul u cu proprietatile
u ⊥ a, u ⊥ b, ‖ u ‖= 14, ]( u, j) > π
2,
unde
a = 3i + 2j + 2k , b = 18i − 22j − 5k .

Aplicatii
Indicatii:
a) α = −6; b) cos(a, b) = 5
21; c) Presupunem ca
u = x i + y j + zk si se determina x, y, z din conditiile
3x + 2y + 2z = 0,
18x − 22y − 5z = 0,
x2 + y2 + z2 = 196,
y < 0.

Aplicatii
Example
In raport cu reperul ortonormat pozitiv {O; i , j}, punctul A are
coordonatele (1, 1). Cu ce unghi trebuie rotite axele de coordonate
astfel incat A sa apartina abscisei noului reper {O; i′, j′}?
Indicatii: presupunem ca noul reper este tot pozitiv. Fie α unghiul
dintre i si i′.
Formula schimbarii de repere:{x ′ = (cosα)x + (sinα)y ,
y ′ = −(sinα)x + (cosα)y .
Punand conditiile y ′ = 0, x = y = 1, se obtine sinα = cosα, deciα = π
4. Noile coordonate ale lui A vor � (2, 0).

Aplicatii
Example
In raport cu reperul ortonormat pozitiv {O; i , j}, punctul A are
coordonatele (1, 1). Cu ce unghi trebuie rotite axele de coordonate
astfel incat A sa apartina abscisei noului reper {O; i′, j′}?
Indicatii: presupunem ca noul reper este tot pozitiv. Fie α unghiul
dintre i si i′.
Formula schimbarii de repere:{x ′ = (cosα)x + (sinα)y ,
y ′ = −(sinα)x + (cosα)y .
Punand conditiile y ′ = 0, x = y = 1, se obtine sinα = cosα, deciα = π
4. Noile coordonate ale lui A vor � (2, 0).