lecture 7 gauss’s law test of the 1/r law using an sgg
TRANSCRIPT

Paik-1
Physics 798G Spring 2007
Lecture 7Gauss’s Law Test of the 1/r2 Law
Using an SGG
Ho Jung Paik
University of Maryland
February 15, 2007

Paik-2
Newtonian null sources
• Uniform spherical shell: The gravity field vanishes inside the shell.
• Infinitely long cylindrical shell: 2-D spherical shell.
• Infinite plane slab: 1-D spherical shell. The field is constant on either side of the plane.
Newton Gauss’s law
Problem: The spherical shell must be made in two halves with holes to support a detector inside.⇒ Source metrology error
Problem: The cylindrical shell must be truncated.⇒ Newtonian error from the missing mass
Problem: The plane slab must be truncated.⇒ Newtonian error from the missing mass
Paik-3
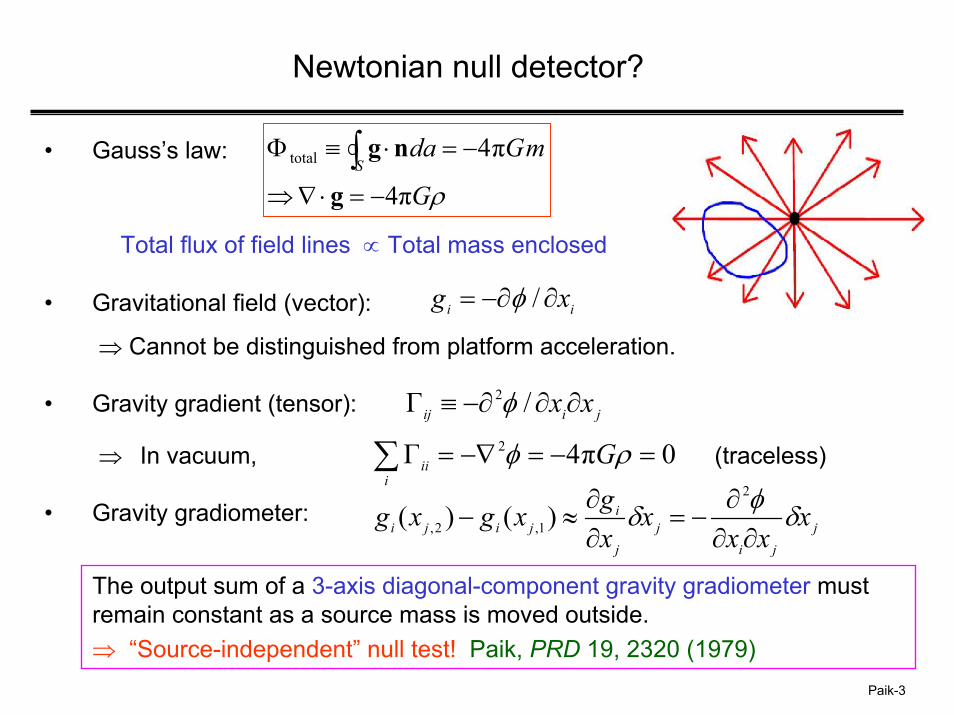
Newtonian null detector?
• Gauss’s law:
• Gravitational field (vector):
⇒ Cannot be distinguished from platform acceleration.
• Gravity gradient (tensor):
⇒ In vacuum, (traceless)
• Gravity gradiometer:
ρG
mGdaS
4π
π4total
−=⋅∇⇒
−=⋅≡Φ ∫g
ng
Total flux of field lines ∝ Total mass enclosed
jiij xx ∂∂−∂≡ /Γ 2φ
0π4Γ 2 =−=−∇=∑ ρφ Gi
ii
The output sum of a 3-axis diagonal-component gravity gradiometer must remain constant as a source mass is moved outside.⇒ “Source-independent” null test! Paik, PRD 19, 2320 (1979)
jji
jj
ijiji x
xxx
xgxgxg δφδ
∂∂∂
−=∂∂
≈−2
1,2, )()(
ii xg ∂−∂= /φ

Paik-4
Gauss’s law test of the 1/r2 law
• Source mass: 1.5-ton Pb pendulum (driven pnematically)
• Detector: 3-axis Superconducting Gravity Gradiometer (SGG)Finite baseline (δx ~ 20 cm) ⇒ Only a near-null detectorFinite baseline error: O(δx/r)2 ⇒ Negligible for geophysical scale exp.
First result:
Chan, Moody, & Paik, PRL 49, 1745 (1982).
True null detector

Paik-5
Superconducting linear accelerometer
pLL
mdAB
0
0
22m
20
,1
2
≡
++=
γ
µγωω
• Large energy coupling:
• Low noise:
m = 1.2 kg, l = 0.19 m, ω0/2π ≈ 10 Hz, Q ≈ 106, T = 4.2 K, β ≈ η ≈ 0.5, EA(f) = (1 + 0.1 Hz/f) 5 × 10−31 J Hz−1 ⇒ S
optimal :21
121 2
00
22
0
m ≈+
=
−=
dmABωµγω
ωβ
+= )(
24)(
200
B fEQ
Tkm
fS Aa βηωω
Hz 1.0 ,Hz s m 102)( 2/12132/1 >×≈ −− ff -a

Paik-6
Design of component accelerometers
Angular accelerometer (αi)Linear accelerometer (ai)
I1 − I2
L3
TEST MASS
L1 L2
SQUID
R
I1 I2
Cantilever spring and niobium pancake coil

Paik-7
Superconducting Gravity Gradiometer
• Test masses are coupled by persistent currents in a differencing circuit to a dc SQUID. ⇒ Γii
• The ratio IS2/IS1 is adjusted to balance out the common mode.
• Test masses are coupled by persistent currents in a summing circuit to another SQUID. ⇒ ai
• Angular acceleration is separately measured. ⇒ αI
• Intrinsic gradient noise:
⇒ Highly sensitive and stable.
TEST MASS 2
TEST MASS 1
SQUID
Lt1
LS3
RSP
LL1
LL2
LS1
LS2
RSS
RL
RBS
LB2
LB1
IL IS2
IS1
IS2 - IS1
IB2
IB1
RBP
Lt2
E) 103(
s 10 E 1 ,Hz E102)(
)(2
8)(
3Earth,zz
29-2/132/1
200
2
×≈Γ
≡×≈
+=
−−−
Γ
ΓfS
fEQ
Tkm
fS AB βηωω
l
Paik-8
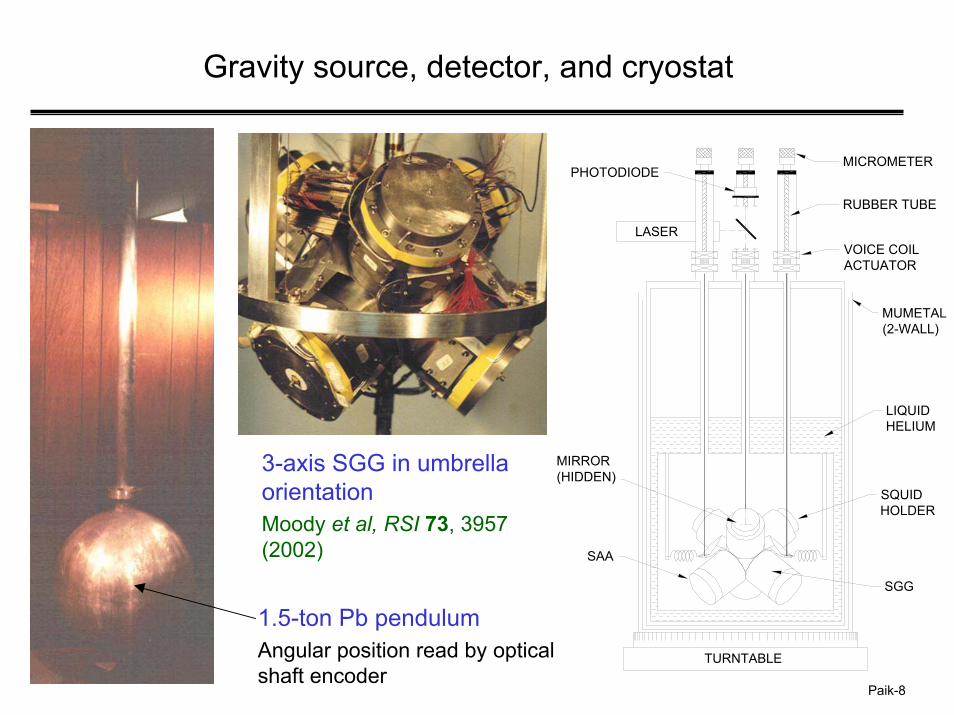
Gravity source, detector, and cryostat
LASER
TURNTABLE
MICROMETER
RUBBER TUBE
VOICE COILACTUATOR
LIQUIDHELIUM
SQUIDHOLDER
SGG
SAA
PHOTODIODE
MUMETAL(2-WALL)
MIRROR(HIDDEN)
1.5-ton Pb pendulumAngular position read by optical shaft encoder
3-axis SGG in umbrella orientationMoody et al, RSI 73, 3957(2002)

Paik-9
Major errors in SGG
• Linear acceleration sensitivity due to axis misalignment:
• Angular acceleration sensitivity due to misconcentricity:
Residual balance: sensitivity to ai and αi is reduced to <10-7 by error compensation.
• Orientation sensitivity:
• Centrifugal acceleration sensitivity:
• Temperature sensitivity due to variation of penetration depth with temperature:
410ˆ ,ˆ1 −≈⋅=Γ nana δδδ r
l
( ) .10ˆ ,ˆˆ 4−≈⋅×=Γ lr
l δ n αδδ α nˆ,l l
1m
2m
1n
2n
( ) )(,' 2,
2 Ω+ΩΩ−ΩΩ−=ΓΩ−ΩΩ−Γ=Γ Ω δδδδδ Okkjjiiijjiijij
)(),()( 1 δθδδθδθ Γ≈Γ= − OiiΓRRΓ'
⇒ Critical error due to nonlinearity
⇒ Low-pass filtered by soft mounting
2/14c ])/(1/[)0()( −−= TTT λλ
Paik-10
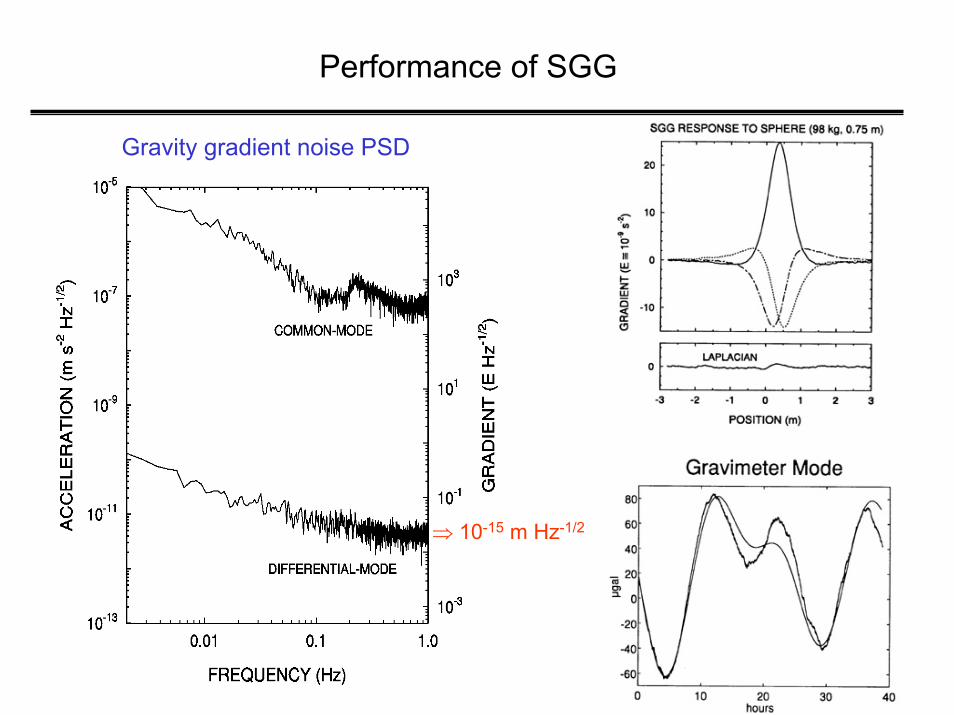
Performance of SGG
⇒ 10-15 m Hz-1/2
Gravity gradient noise PSD
Paik-11
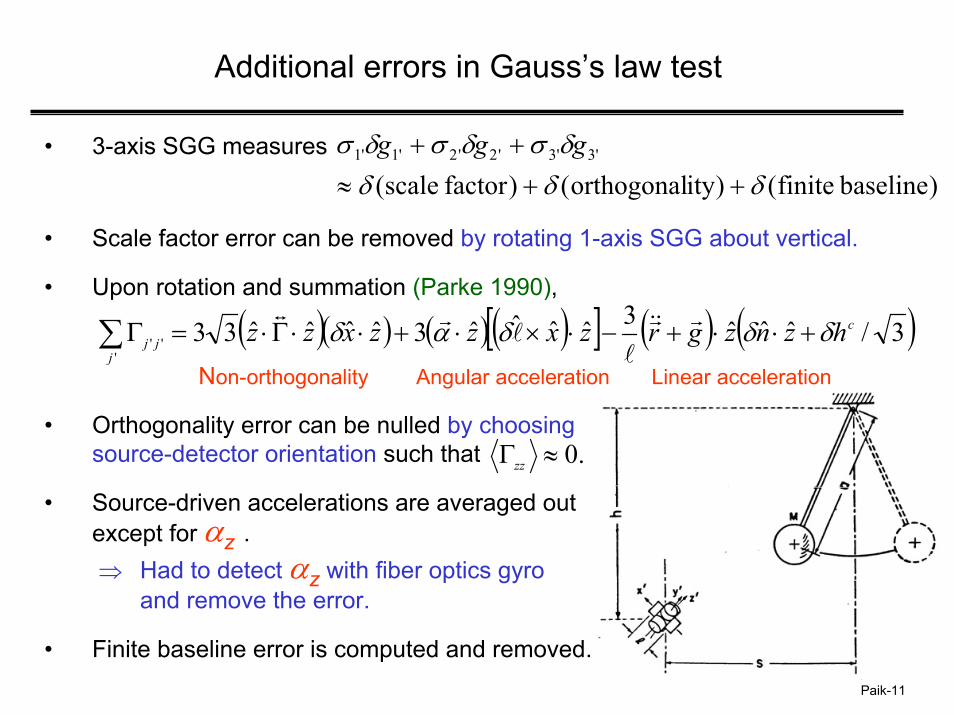
Additional errors in Gauss’s law test
• 3-axis SGG measures
• Scale factor error can be removed by rotating 1-axis SGG about vertical.
• Upon rotation and summation (Parke 1990),
Non-orthogonality Angular acceleration Linear acceleration
• Orthogonality error can be nulled by choosingsource-detector orientation such that
• Source-driven accelerations are averaged out except for αz .⇒ Had to detect αz with fiber optics gyro
and remove the error.
• Finite baseline error is computed and removed.
)baseline finite()ityorthogonal()factor scale('3'3'2'2'1'1
δδδδσδσδσ
++≈++ ggg
( )( ) ( ) ( )[ ] ( ) ( )3/ˆˆˆ3ˆˆˆˆ3ˆˆˆˆ33'
''c
jjj hznzgrzxzzxzz δδδαδ +⋅⋅+−⋅×⋅+⋅⋅Γ⋅=Γ∑
r&&r
ll
rt
.0≈Γzz

Paik-12
Experimental data
• Inverse-square law data • Data was taken over 33 nights, with SGG rotated automatically by 120° at a time.
The data for Gradiometer 2 showed a sign of a current leakage and was discarded.
Source-driven acceleration errors are mostly in even harmonics and filtered out.

Paik-13
1/r2 law result
• Resolution of the Gauss’s law test • Double null experimentSource: Cylindrical shell Detector: 3-axis SGG
m 5.1at 10)6.49.0(
)2( 10)10.358.0(4
4
=×±=
×±=Γ−
−∑λα
σii
Moody & Paik, PRL 70, 1195 (1993)