lecture21 - university of rochester
TRANSCRIPT
1
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Physics 121, April 8, 2008.Harmonic Motion.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Physics 121.April 8, 2008.
• Course Information
• Topics to be discussed today:
• Simple Harmonic Motion (Review).
• Simple Harmonic Motion: Example Systems.
• Damped Harmonic Motion
• Driven Harmonic Motion
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Physics 121.April 8, 2008.
• Homework set # 8 is due on Saturday morning, April 12, at8.30 am.
• Homework set # 9 will be available on Saturday morning at8.30 am, and will be due on Saturday morning, April 19, at8.30 am.
• Requests for regarding part of Exam # 1 and # 2 need to begiven to me by April 17. You need to write down what Ishould look at and give me your written request and yourblue exam booklet(s).
2
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
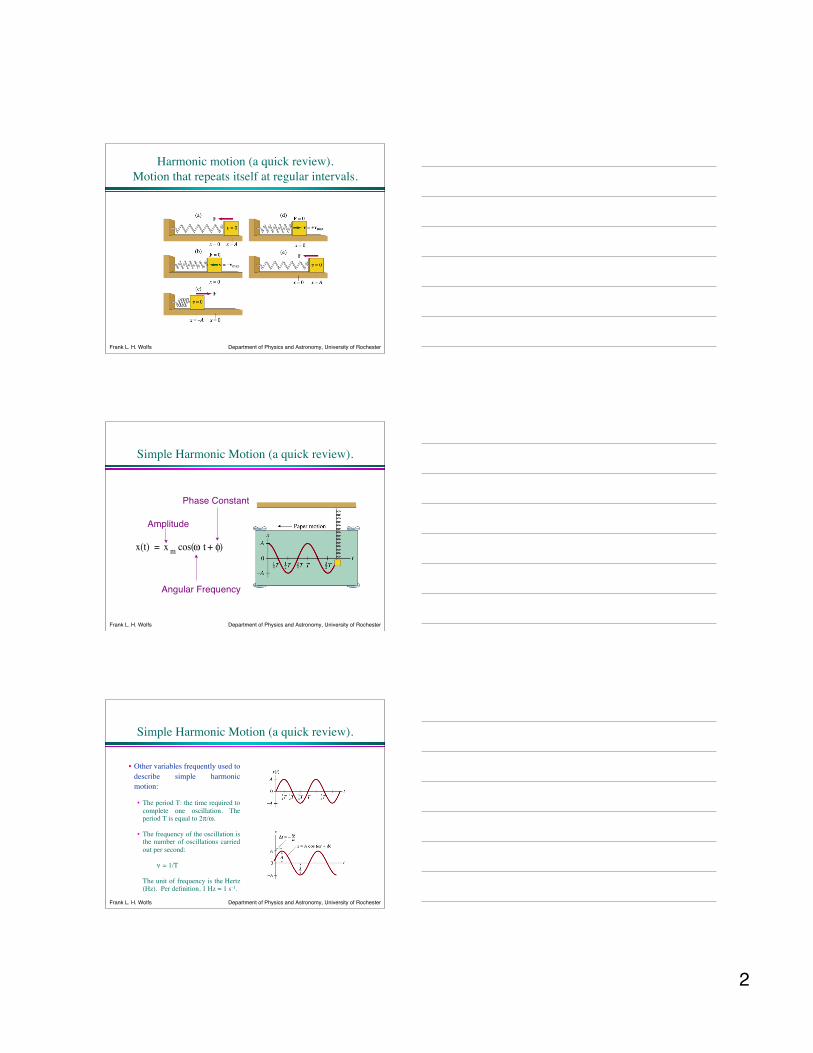
Harmonic motion (a quick review).Motion that repeats itself at regular intervals.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
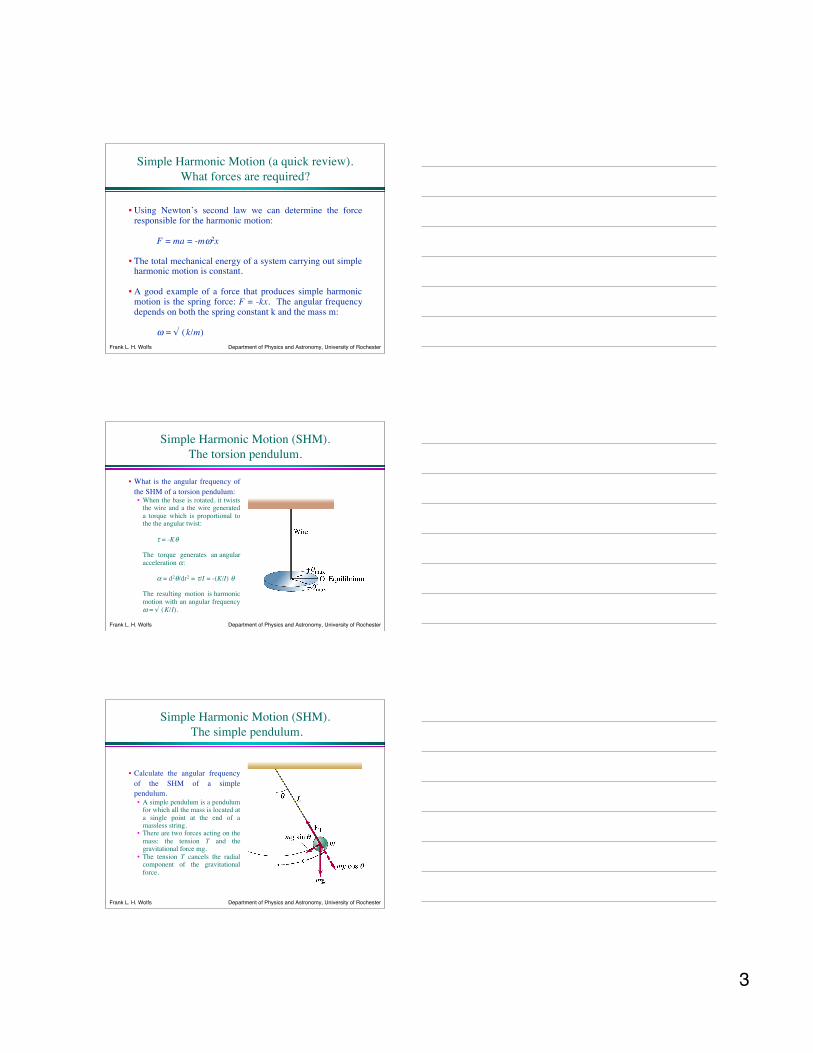
Simple Harmonic Motion (a quick review).
x(t) = xm
cos(! t + ")
Amplitude
Phase Constant
Angular Frequency
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (a quick review).
• Other variables frequently used todescribe simple harmonicmotion:
• The period T: the time required tocomplete one oscillation. Theperiod T is equal to 2π/ω.
• The frequency of the oscillation isthe number of oscillations carriedout per second:
ν = 1/T
The unit of frequency is the Hertz(Hz). Per definition, 1 Hz = 1 s-1.
3
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (a quick review).What forces are required?
• Using Newton’s second law we can determine the forceresponsible for the harmonic motion:
F = ma = -mω2x
• The total mechanical energy of a system carrying out simpleharmonic motion is constant.
• A good example of a force that produces simple harmonicmotion is the spring force: F = -kx. The angular frequencydepends on both the spring constant k and the mass m:
ω = √ ( k/m)
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM).The torsion pendulum.
• What is the angular frequency ofthe SHM of a torsion pendulum:• When the base is rotated, it twists
the wire and a the wire generateda torque which is proportional tothe the angular twist:
τ = -Kθ
The torque generates an angularacceleration α:
α = d2θ/dt2 = τ/I = -(K/I) θ
The resulting motion is harmonicmotion with an angular frequencyω = √ (K/I).
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM). The simple pendulum.
• Calculate the angular frequencyof the SHM of a simplependulum.• A simple pendulum is a pendulum
for which all the mass is located ata single point at the end of amassless string.
• There are two forces acting on themass: the tension T and thegravitational force mg.
• The tension T cancels the radialcomponent of the gravitationalforce.
4
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
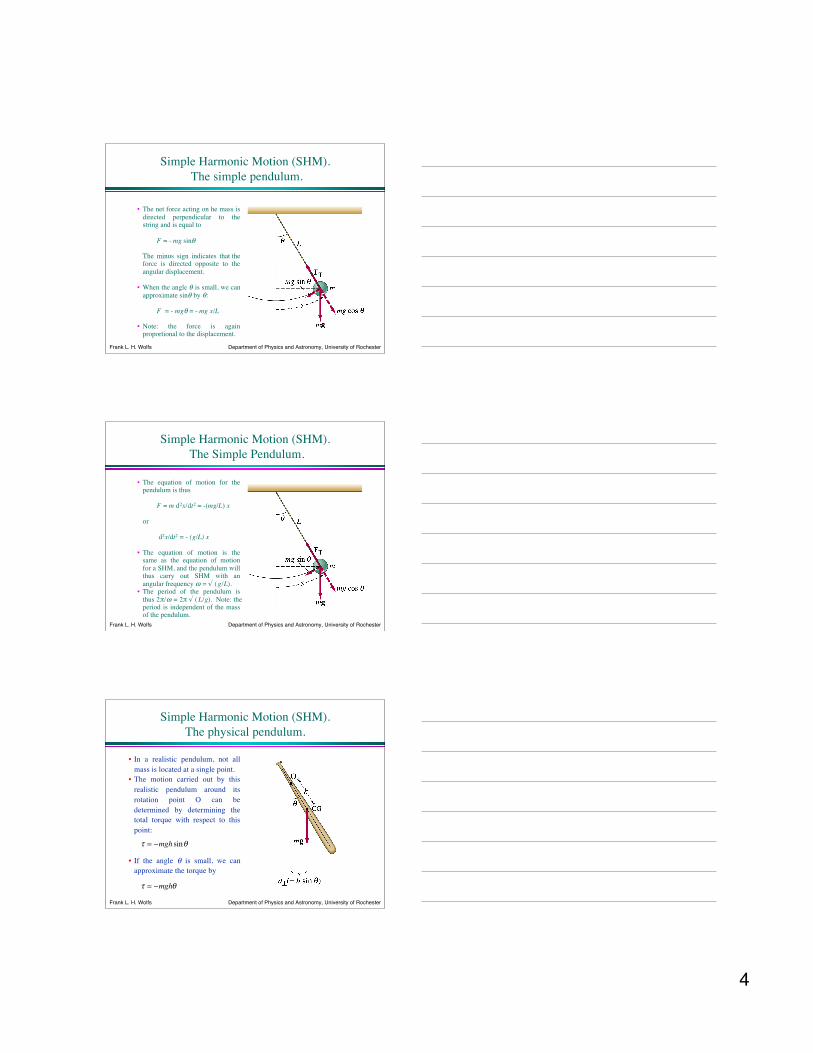
Simple Harmonic Motion (SHM). The simple pendulum.
• The net force acting on he mass isdirected perpendicular to thestring and is equal to
F = - mg sinθ
The minus sign indicates that theforce is directed opposite to theangular displacement.
• When the angle θ is small, we canapproximate sinθ by θ:
F = - mgθ = - mg x/L
• Note: the force is againproportional to the displacement.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM). The Simple Pendulum.
• The equation of motion for thependulum is thus
F = m d2x/dt2 = -(mg/L) x
or
d2x/dt2 = - (g/L) x
• The equation of motion is thesame as the equation of motionfor a SHM, and the pendulum willthus carry out SHM with anangular frequency ω = √ (g/L).
• The period of the pendulum isthus 2π/ω = 2π √ ( L/g). Note: theperiod is independent of the massof the pendulum.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM).The physical pendulum.
• In a realistic pendulum, not allmass is located at a single point.
• The motion carried out by thisrealistic pendulum around itsrotation point O can bedetermined by determining thetotal torque with respect to thispoint:
• If the angle θ is small, we canapproximate the torque by
! = "mgh sin#
! = "mgh#
5
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
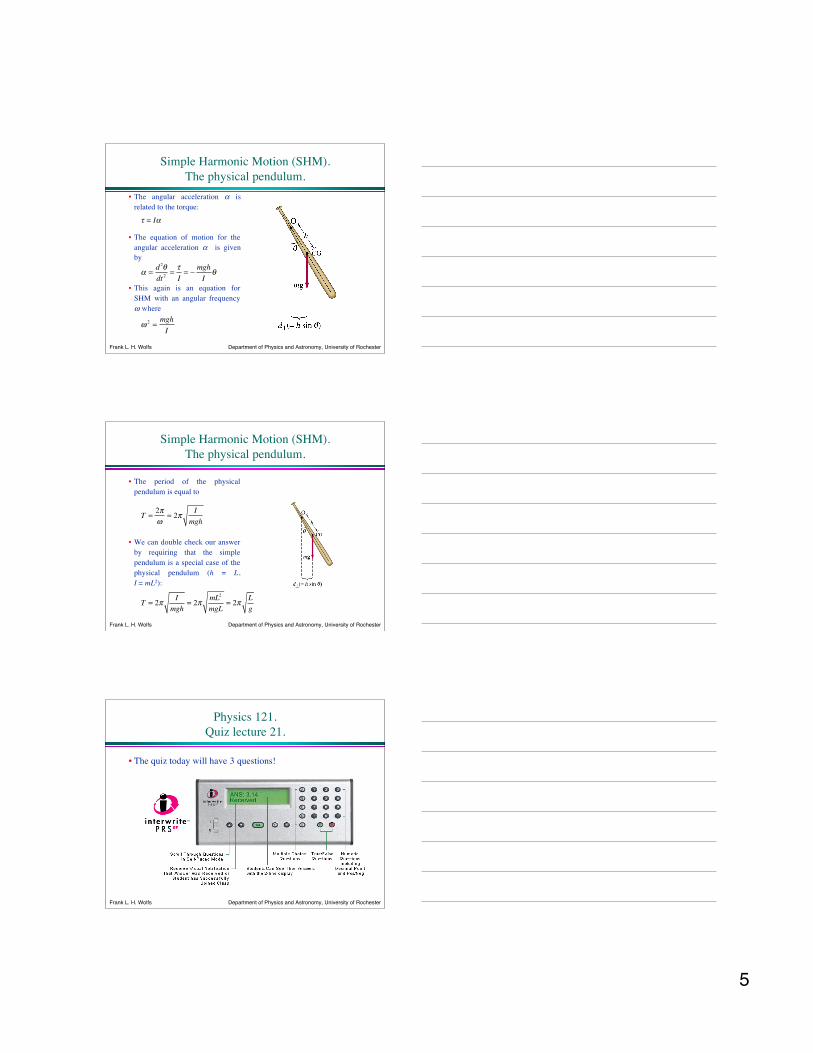
Simple Harmonic Motion (SHM).The physical pendulum.
• The angular acceleration α isrelated to the torque:
• The equation of motion for theangular acceleration α is givenby
• This again is an equation forSHM with an angular frequencyω where
! = I"
! =d2"
dt2=#
I= $
mgh
I"
!2=mgh
I
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM).The physical pendulum.
• The period of the physicalpendulum is equal to
• We can double check our answerby requiring that the simplependulum is a special case of thephysical pendulum (h = L,I = mL2):
T =2!
"= 2!
I
mgh
T = 2!I
mgh= 2!
mL2
mgL= 2!
L
g
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Physics 121.Quiz lecture 21.
• The quiz today will have 3 questions!
6
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM).The equation of motion.
• All examples of SHM were derived from he followingequation of motion:
• The most general solution to the equation is
d2x
dt2= !"
2x
x t( ) = A cos !t +"( ) + B sin !t + #( )
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Simple Harmonic Motion (SHM).The equation of motion.
• If A = B
which is SHM.
x t( ) = A cos !t +"( ) + B sin !t + #( ) =
= A sin1
2$ %!t %"&
'()*++ sin !t + #( )
&'(
)*+=
= 2A sin1
4$ +
#2%"2
&'(
)*+cos
1
4$ %!t %
#2%"2
&'(
)*+
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Damped Harmonic Motion.
• Consider what happens when in addition to the restoringforce a damping force (such as the drag force) is acting onthe system:
• The equation of motion is now given by:
F = !kx ! bdx
dt
d2x
dt2+
b
m
dx
dt+
k
mx = 0
7
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Damped Harmonic Motion.
• The general solution of this equation of motion is
• If we substitute this solution in the equation of motion wefind
• In order to satisfy the equation of motion, the angularfrequency must satisfy the following condition:
x t( ) = Ae
i!t
!"2Ae
i"t+ i"
b
mAe
i"t+
k
mAe
i"t= 0
!2" i!
b
m"
k
m= 0
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Damped Harmonic Motion.
• We can solve this equation and determine the two possiblevalues of the angular velocity:
• The solution to the equation of motion is thus given by
SHM TermDamping Term
! =1
2i
b
m± 4
k
m" b
2
m2
#
$%%
&
'((!
1
2i
b
m±
k
m
x t( ) ! x
me!
bt
2meit
k
m
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
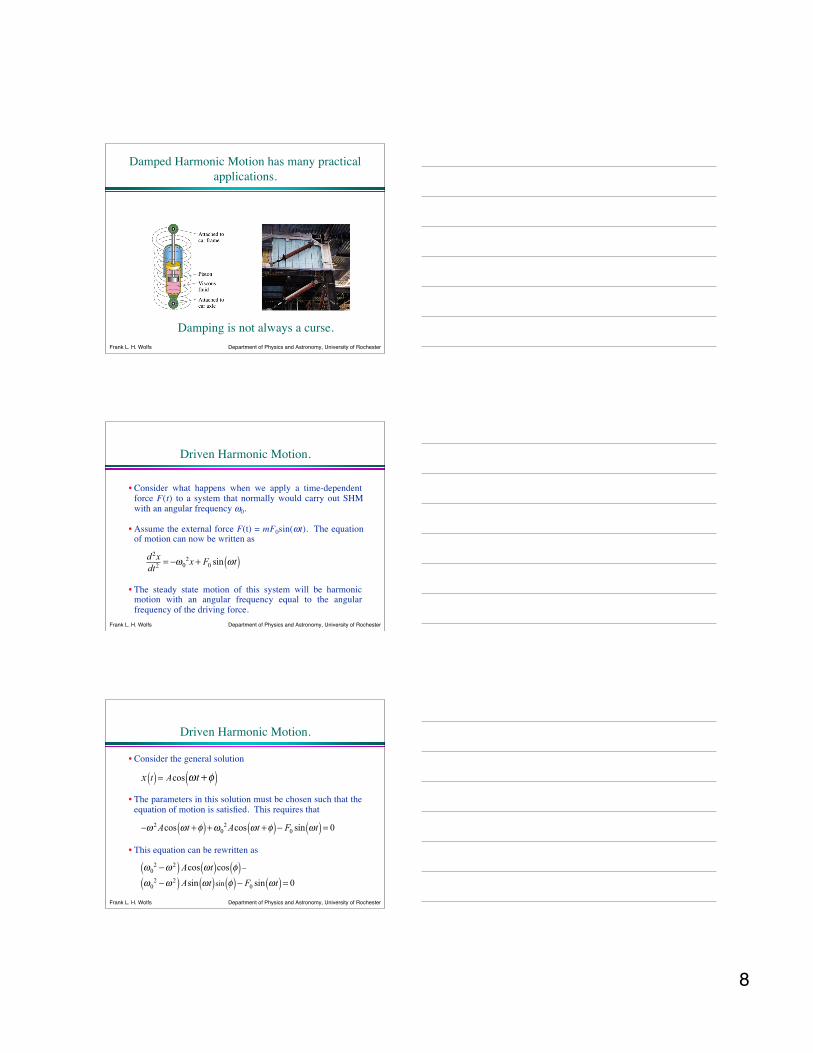
Damped Harmonic Motion.
x t( ) ! xm
e!
bt
2meit
k
m
E t( ) !1
2kx
m
2e!
bt
m
The general solution contains a SHM term, with an amplitude that decreases as function of time
8
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Damped Harmonic Motion has many practicalapplications.
Damping is not always a curse.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
• Consider what happens when we apply a time-dependentforce F(t) to a system that normally would carry out SHMwith an angular frequency ω0.
• Assume the external force F(t) = mF0sin(ωt). The equationof motion can now be written as
• The steady state motion of this system will be harmonicmotion with an angular frequency equal to the angularfrequency of the driving force.
d2x
dt2= !"
0
2x + F
0sin "t( )
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
• Consider the general solution
• The parameters in this solution must be chosen such that theequation of motion is satisfied. This requires that
• This equation can be rewritten as
x t( ) = Acos !t +"( )
!" 2
Acos "t +#( ) +"0
2Acos "t +#( )! F
0sin "t( ) = 0
!0
2 "! 2( ) Acos !t( )cos #( ) "!
0
2 "! 2( ) Asin !t( )sin #( )" F0
sin !t( ) = 0
9
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
• Our general solution must thus satisfy the followingcondition:
• Since this equation must be satisfied at all time, we mustrequire that the coefficients of cos(ωt) and sin(ωt) are 0.This requires that
and
!0
2 "! 2( ) Acos !t( )cos #( ) " !0
2 "! 2( ) Asin #( )" F0{ }sin !t( ) = 0
!
0
2 "! 2( ) Acos #( ) = 0
!
0
2 "! 2( ) Asin #( )" F0= 0
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
• The interesting solutions are solutions where A ≠ 0 andω ≠ ω0. In this case, our general solution can only satisfythe equation of motion if
and
• The amplitude of the motion is thus equal to
cos !( ) = 0
!
0
2 "! 2( ) Asin #( )" F0= !
0
2 "! 2( ) A" F0= 0
A=F
0
!0
2"!
2( )
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
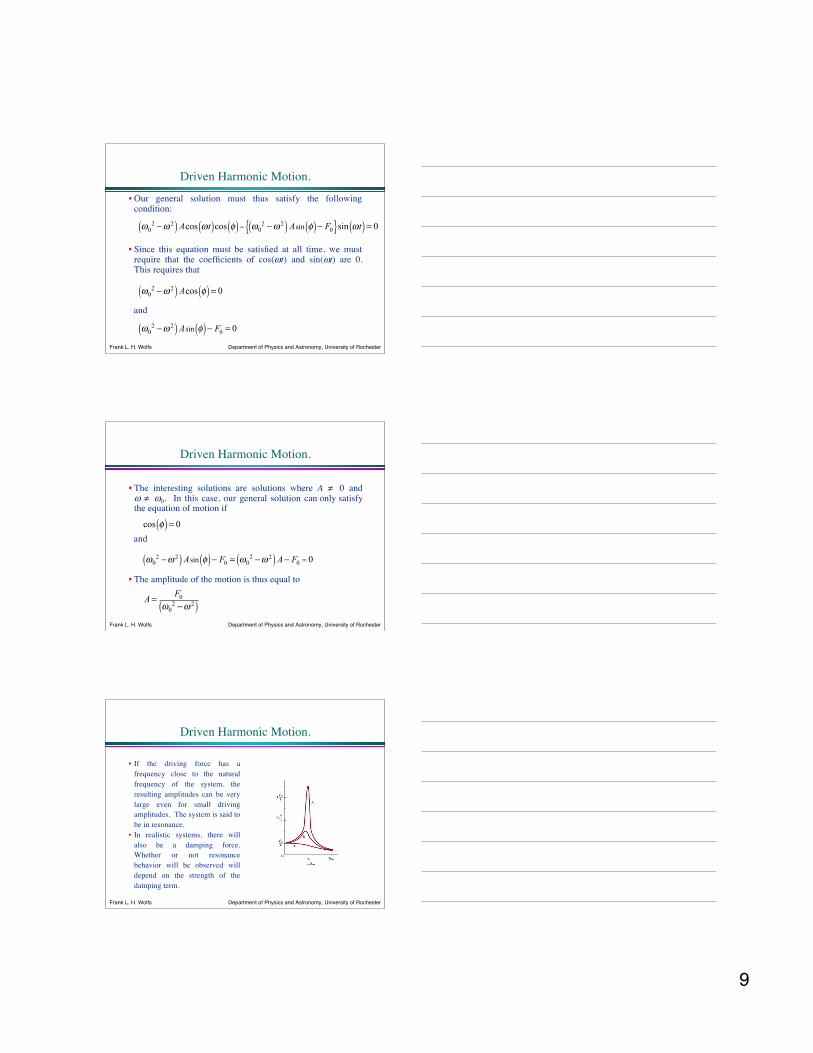
• If the driving force has afrequency close to the naturalfrequency of the system, theresulting amplitudes can be verylarge even for small drivingamplitudes. The system is said tobe in resonance.
• In realistic systems, there willalso be a damping force.Whether or not resonancebehavior will be observed willdepend on the strength of thedamping term.
10
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Driven Harmonic Motion.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester
Done for today!Thursday: Temperature and Heat!
Unusually Strong Cyclone Off the Brazilian Coast: A lot of Rotational Motion!Credit: Jacques Descloitres, MODIS Land Rapid Response Team, GSFC, NASA