les solutions libres pour les systèmes embarqués
TRANSCRIPT

1Logiciels libres et SE
Solutions libres pour les systèmes embarqués
Pierre FICHEUX ([email protected])
Mars 2015

2Logiciels libres et SE
Programme
● Présentation● Rappels sur les systèmes embarqués et temps réel● Le logiciel libre● Linux comme système embarqué● Extensions temps réel de Linux● Android « embarqué »● eCOS et RTEMS● Les outils libres pour l'embarqué● Open hardware● Co-design

3Logiciels libres et SE
Présentation Open Wide
● Société d'ingénierie créée en septembre 2001 avec le concours de THALES et Schneider Electric
● Rachat d'ESG-France (automotive) en 2014● Environ 160 salariés sur Paris, Lyon, Toulouse et
bientôt Grenoble● Industrialisation de composants open source
– Développement
– Conseil / Formation
● Trois activités :– OW Système d'Information (Java/PHP)
– OW Outsourcing: hébergement
– OW Ingénierie: informatique industrielle

4Logiciels libres et SE
Présentation PF
● Ingénieur Arts et Métiers + Sup'Aéro● Utilisateur de logiciels libres depuis 1989● Utilisateur de Linux depuis 1992● Auteur des 4 éditions de l'ouvrage « Linux embarqué »
(Eyrolles), 4ème édition parue en juin 2012 avec E. Bénard● Auteur GNU Linux Magazine et Open Silicium● CTO Open Wide Ingénierie, enseignant EPITA, ENSEIRB

5Logiciels libres et SE
Rappels sur les systèmes embarqué

6Logiciels libres et SE
Système / logiciel embarqué
● Un système est l'association matériel + logiciel● Logiciel utilisé dans un équipement industriel ou un
bien de consommation● On dit aussi logiciel dédié ou intégré → embedded
software● L'équipement est valorisé pour son coté fonctionnel et
non pas pour le logiciel !● Un bon logiciel embarqué doit savoir se faire oublier !● On parle parfois de logiciel enfoui ou profondément
enfoui → « deeply embedded »
7Logiciels libres et SE
Domaines d'application
● 1960-70 : remplacer / compléter des systèmes analogiques (spatial)
● 1980 : RTOS (Real Time OS) génériques● 2000 : OS libres, grand public● Domaines historiques/industriels
– Militaire, spatial (RTOS/360, VRTX sur Hubble)
– Contrôle de processus industriel
– Transport : AUTOSAR/OSEK, ARINC 653 → certification (DO-178)
– Internet/Telecom : routeurs, PABX
● « Nouveaux » domaines– Multimédia
– automobile (IVI), objets connectés
– médical

8Logiciels libres et SE
Les nouveaux domaines
● Équipement grand public (multimédia, domotique, …)● Téléphonie → 1+ milliards de téléphones Android !● Infotainment transport: automobile, aéronautique
– Ajout de fonctions communicantes → utilisation de protocoles standards de type IP et dérivés (HTTP, DHCP, etc.)
– Difficile d'intégrer ces couches dans des logiciels embarqués propriétaires → utilisation d'un OS
● « Boite noire » dédiée à un ensemble de fonctions (passerelle médicale, set-top box avec services étendus)
● Internet des objets → #iot :-)

9Logiciels libres et SE
Avantages d'un OS
● Affranchit le développeur d'un travail d'adaptation au matériel pour les interfaces de base (PCI, USB, Ethernet...)
● Permet de bénéficier des dernières avancées technologiques et de faire évoluer le système: protocoles réseau, multimédia, etc.
● Recrutement aisé de développeurs (Linux, Android) !● Utilisation de matériel « standard »● Focalisation sur le métier de l'entreprise

10Logiciels libres et SE
Inconvénients d'un OS
● Empreinte mémoire● Performances● Consommation d'énergie (nombreux travaux en cours)● Criticité (sauf OS spécialisés)● Perte de maîtrise du système

11Logiciels libres et SE
Les systèmes temps réel
● Les applications embarquées historiques étaient temps réel
● Les systèmes d'exploitation embarqués propriétaires sont TR (VxWorks, LynxOS, VRTX, ...) → RTOS
● La progression des OS libres dans l'industrie et dans l'embarqué en général modifie la donne !
– Linux est utilisable dans l'industrie
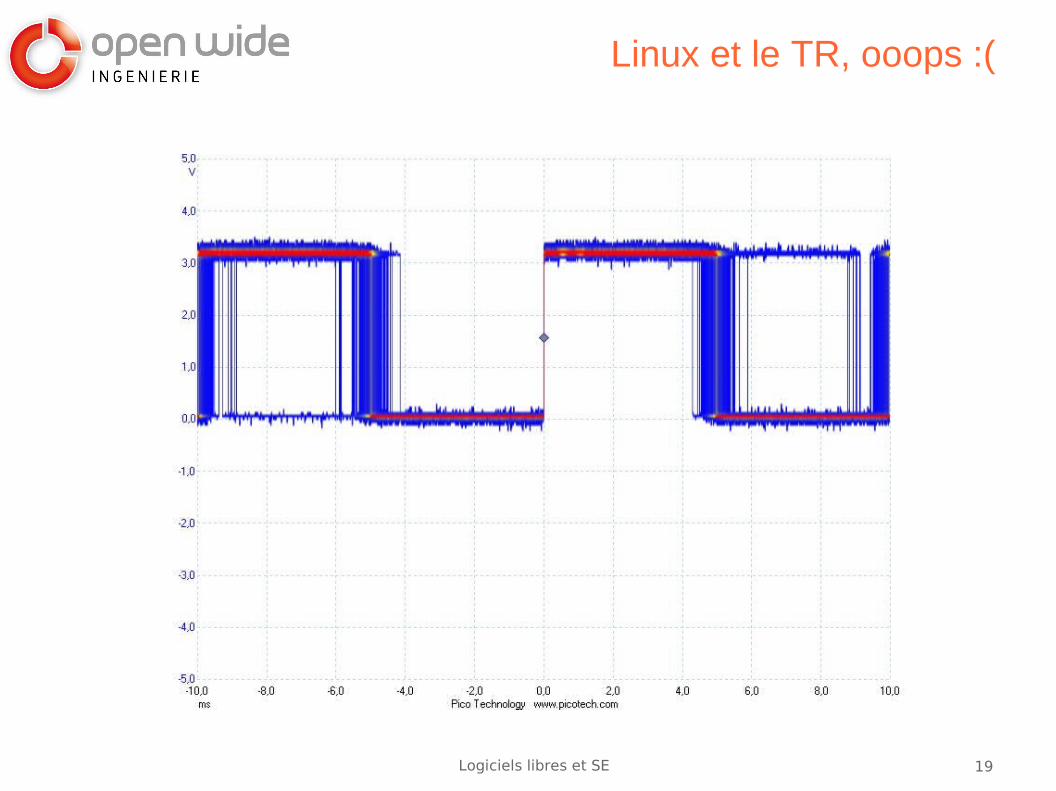
– Linux n'est pas TR
– Linux peut être modifié pour être TR (PREEMPT-RT, Xenomai)
– Il existe des RTOS libres (RTEMS, FreeRTOS, ...)

12Logiciels libres et SE
Le logiciel libre dans l'embarqué

13Logiciels libres et SE
Historique
● Modèle économique du marché informatique → du matériel vers le logiciel
● Projets logiciels libres majeurs (chronologie)– UNIX BSD
– X Window System (X11)
– GNU (tout d'abord sur UNIX propriétaire)
– Linux → GNU/Linux
– Apache
● Apparition de licences libres (vs « freeware »)– BSD
– GPL (dérivation et « contamination »)
– ASL

14Logiciels libres et SE
Quelques éléments sur le LL
● A peu près équivalent à la notion d'open source, voir http://www.opensource.org
● Libre ne veut pas dire gratuit● La confusion vient de la signification anglaise
– free = libre / gratuit
● Différents types de logiciels– Le freeware : gratuit mais sources non disponibles, pas
forcément de licence (abandon de la « paternité » du code)
– Le shareware : sources non disponibles, coût modique, licence souvent propriétaire
– Le logiciel libre: sources disponibles, licence open source, non liée à la notion de gratuité (on peut vendre un logiciel libre)

15Logiciels libres et SE
Importance du logiciel libre
● Le logiciel libre est important dans le SI (serveurs)● Le logiciel libre a pris un part importante dans les
systèmes embarqués– OS (Linux, Android)
– Outils de base (compilateur, éditeur, débogueur, ...)
– « build systems » (Buildroot, Yocto/OE)
– IDE (Eclipse)
● La plupart des éditeurs ont au catalogue des composants basés sur du logiciel libre (Wind River, Adacore, LynuxWorks, ...)

16Logiciels libres et SE
Avantages/inconvénients du LL
● Avantages– Disponibilité du code source → maîtrise et
maintenabilité dans le temps
– Redistribution sans « royalties »
– Outils de développement souvent « gratuits » !
– Support de la communauté
● Inconvénients– Méfiance vis à vis d'un modèle décentralisé (support)
– Contraintes de certaines licences (GPL, LGPL)
– Support de certains matériels (?)
– Outils moins « ciblés »
– Documentation (?)

17Logiciels libres et SE
Les OS libres pour l'embarqué

18Logiciels libres et SE
Linux comme (RT)OS
● Réservé aux systèmes complexes– 32 bits minimum
– Gestion complexe de la mémoire (MMU, pagination + segmentation)
– Empreinte mémoire importante: 2 Mo pour µCLinux (sans MMU), 4 Mo pour Linux
– Consommation mémoire vive : 16 Mo minimum
● Problème de migration de anciens RTOS car Linux n’est pas TR → évolution avec les extensions PREEMPT-RT et Xenomai
● Incompatible avec les systèmes critiques/certifiés● Souvent utilisé pour les outils, les simulateurs et
architectures « mixtes » (banc de test)
19Logiciels libres et SE
Linux et le TR, ooops :(

20Logiciels libres et SE
Extensions TR pour Linux
● L'utilisation de Linux comme RTOS est souvent intéressante
– POSIX
– Approche hybride avec quelques tâches TR
– On conserve le confort d'un système classique
● Deux approches possibles :– Modifier le noyau Linux afin d'améliorer ses
performances TR (PREEMPT-RT)
– Ajouter un « co-noyau » TR qui partage le matériel avec le noyau Linux (RTLinux, RTAI, Xenomai) → approche « virtualisation »

21Logiciels libres et SE
PREEMPT-RT
● Branche expérimentale pour le noyau 2.6, voir https://rt.wiki.kernel.org
● Initié par Ingo Molnar, contributeur majeur du noyau● Maintenu par Thomas Gleixner● Surtout utilisé sur x86 et des processeurs performants
(TSC = Time Stamp Counter)● Fonctionne également sur ARM (11 ou plus), Nios II,
Microblaze, ...● Nécessite un noyau « mainline » (ou proche) mais ne
sera probablement jamais intégré à la branche officielle● Mise en place très simple (application d'un patch)● Mêmes API de programmation que Linux standard

22Logiciels libres et SE
PREEMPT-RT, caractéristiques
Utilisation d'un thread noyau (interruptible) pour le traitement de chaque interruption 4 2 root SW< 0 0% 0% [sirq-high/0]
5 2 root SW< 0 0% 0% [sirq-timer/0]
6 2 root SW< 0 0% 0% [sirq-net-tx/0]
● Prévention des inversions de priorité (par héritage)● Timers noyau haute précision (HRTIMER)● Amélioration des mécanismes de synchronisation● Le résultat est un noyau (presque) « préemptif », mais
reste un noyau Linux
23Logiciels libres et SE
PREEMPT-RT, résumé
● Changements significatifs du code noyau– Verrouillage des sections critiques
– Volume du patch important
● Utilisation de mlockall() → verrouillage des pages mémoire en RAM
● Le coût de la préemption peut être important si le nombre de tâches TR augmente
● Temps de latence maximum nettement amélioré– dépend largement de la plate-forme matérielle (TSC)
– dépend de la configuration logicielle
– Bons résultats sur x86 depuis de nombreuses années
● Permet de garantir moins de 50 µs de jitter (x86)● Risque sur la maintenance (financement) ?

24Logiciels libres et SE
Linux avec co-noyau
● Ajout d'un « co-noyau » pour la gestion du temps-réel– Sous-système temps-réel intégré à un module noyau
– Patch de « virtualisation » des interruptions
● Différents modèles de programmation– Noyau uniquement (RTLinux, version libre)
– Noyau et espace utilisateur, semi-intégration Linux (RTAI, www.rtai.org)
– Noyau & espace utilisateur, intégration Linux complète (Xenomai, www.xenomai.org)

25Logiciels libres et SE
Linux avec co-noyau
● Séparation entre le composant temps-réel et Linux– Ordonnanceur temps-réel spécifique
– Pas de dépendance sur les sections critiques Linux :-)
● Virtualisation de la gestion d'interruptions Linux– Routage prioritaire des IRQs vers le co-noyau
● Linux comme tâche idle du co-noyau● Volume du patch noyau plus faible qu'avec PREEMPT-
RT● Se rapproche de la technique de « para-virtualisation »
des hyperviseurs (adaptation de l'OS)

26Logiciels libres et SE
Linux + co-noyau, suite
● Peu de modifications sur le noyau Linux– patch de virtualisation (très bas niveau)
– notion de domaine d'exécution (temps-réel / normal)
● Pas d'impact sur l'écriture de code noyau classique● Impact sur l'écriture de code temps-réel !
– utilisation des API fournies par le co-noyau
● Excellentes performances TR– ordonnanceur spécifique indépendant
– sous-système temps-réel bien délimité
– jitter maximal de l’ordre de 10 µs sur Atom/x86 !

27Logiciels libres et SE
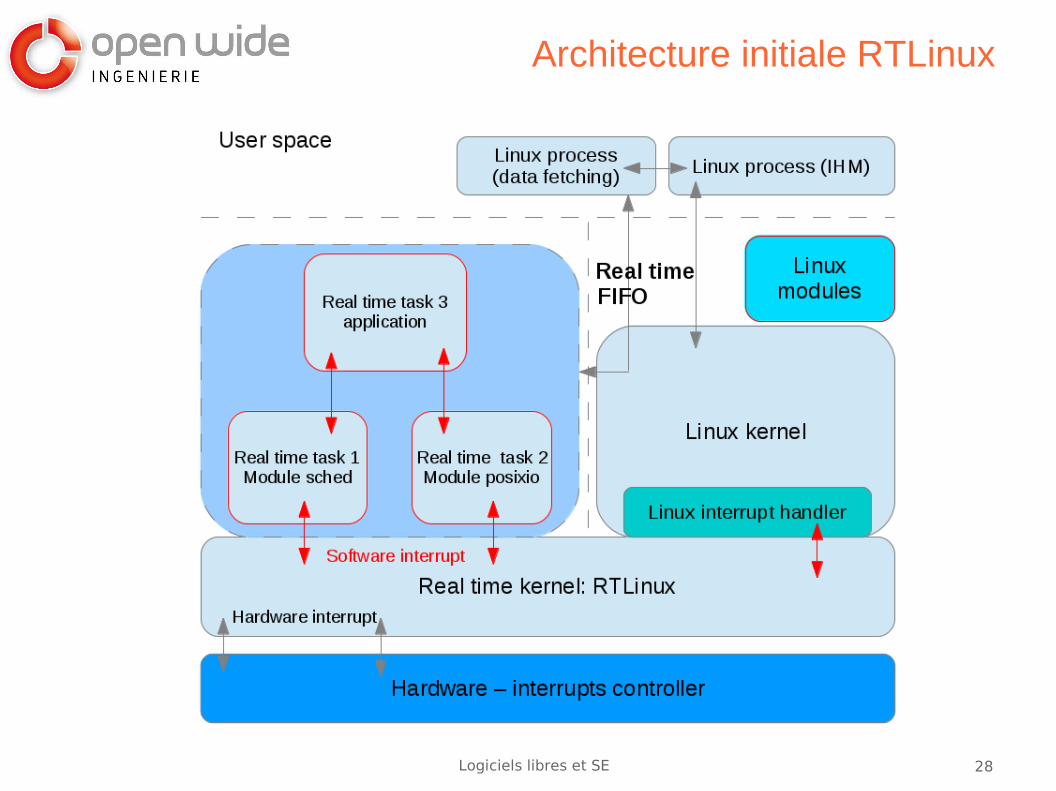
RTLinux
● Projet universitaire (NMT) développé par Victor Yodaiken et Michael Barabanov en 1999
● Produit commercial développé par FSMLabs● Dépôt d’un brevet logiciel → conflit avec la FSF● Vendu à WIND RIVER en 2007● Développement en espace noyau (?)● Version GPL obsolète (2.6.9) retirée par WIND RIVER
28Logiciels libres et SE
Architecture initiale RTLinux

29Logiciels libres et SE
RTLinux en 2002

30Logiciels libres et SE
RTAI
● Real Time Application Interface● Un « fork » de RTLinux développé au DIAPM de l’école
polytechnique de Milan → Dipartimento di Ingegneria Aerospaziale (Paolo Montegazza)
● Utilisé au DIAPM pour des travaux d’enseignement et de recherche
● Quelques utilisations industrielles● Position douteuse / brevet logiciel FSMLabs● Toujours actif mais peu d’évolution → version 3.8 en
février 2010, 3.9 en août 2012

31Logiciels libres et SE
Xenomai
● Xenomai est un sous-système temps-réel de Linux– Programmation de tâches en espace utilisateur
– API d'application et de pilotes temps réel (RTDM) dédiées
● Intégré au noyau Linux → « Real-time sub-system »● Supporte de nombreuses architectures● Dispose de « skins » permettant d'émuler des API
temps réel (POSIX, VxWorks, VRTX, uITRON, ...)● Plus complexe à mettre en œuvre que PREEMPT-RT
mais performances 5 à 10 fois supérieures● Licence GPL (cœur), LGPL (interfaces, espace
utilisateur)
32Logiciels libres et SE
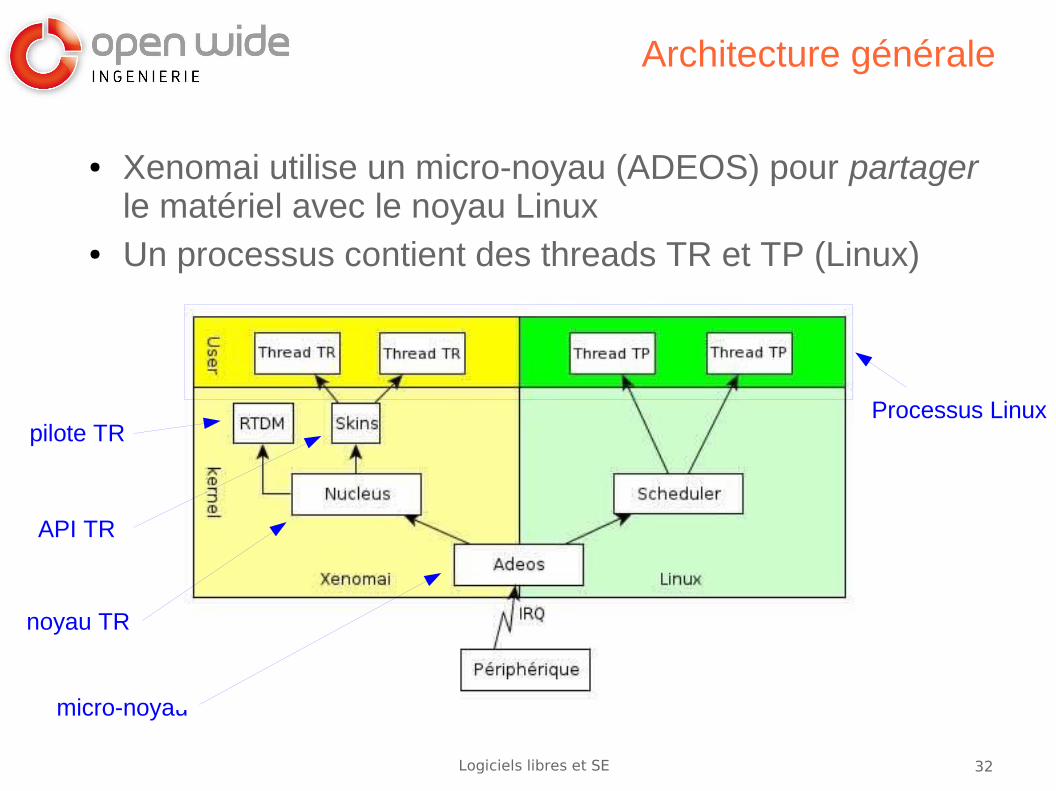
Architecture générale
● Xenomai utilise un micro-noyau (ADEOS) pour partager le matériel avec le noyau Linux
● Un processus contient des threads TR et TP (Linux)
micro-noyau
noyau TR
API TR
pilote TRProcessus Linux

33Logiciels libres et SE
Répartition sur les deux domaines
Hardware
VFS/FS ...
Pile réseau Xenomai RTOS
Adeos I-Pipe
Noyau
Code applicatif VxWorks
glibcXenomailibvxworks
Code applicatif POSIX
Xenomailibpthread
Appels système
glibc
libpthread_rt
Noyau Linux

34Logiciels libres et SE
Linux/Xenomai et le TR :)

35Logiciels libres et SE
Android
● Android = un système d'exploitation basé sur un noyau Linux
● Un « framework » fournissant des applications et permettant d'en ajouter facilement
● Basé sur Dalvik (puis ART), une machine virtuelle Java (très) optimisée pour le mobile
● Navigateur web basé sur Webkit puis Chrome● Graphique optimisé en 2D ou 3D basé sur OpenGL/ES● Nouvel environnement de développement « Android
Studio » compatible avec Android « wear » (#IoT)● Partiellement open source mais pas réellement du
logiciel libre...

36Logiciels libres et SE
Android et l'industrie
● Linux fournit des API graphiques (Qt, EFL) mais « difficiles » à programmer
● Android est avantageux si le projet utilise une IHM● Base importante d'applications Android !● Android est conçu pour la téléphonie et les tablettes
mais des BSP Android sont fournis pour les cartes (ARM) récentes (BB Black, i.MX6, ...)
● Android utilise un noyau Linux :-)● Assez peu de projets pour l'instant● Concurrence de Yocto !

37Logiciels libres et SE
Avantages/inconvénients
● Avantages– Programmation Java (simple et répandue) + IHM
– Communauté importante
– Fait rêver les managers (tablette = grand public → bon marché)
● Inconvénients– Compatibilité POSIX partielle
– Système de « build » statique assez rudimentaire par rapport à ceux de Linux (Buildroot, OE)
– Qualité des BSP variable mais portage « simple »
– Pas réellement un projet libre ni communautaire :-(
– Google fait peur !
– Interfaces matérielles industrielles non supportées (CAN, I2C, SPI, …)
38Logiciels libres et SE
eCOS
● embeddable Configurable OS (CYGNUS 1997)● Supporte de nombreux CPU (16), 32 et 64 bits● Empreinte mémoire de 10 à 100 Ko● Outils de configuration avancé, gestion de «paquets»● Version « pro » par ● Utilisé dans le multimédia :
– http://www.ecoscentric.com/ecos/examples.shtml

39Logiciels libres et SE
RTEMS
● RTEMS = Real Time Executive for Multiprocessor Systems
● Initialement « Missile Systems » puis « Military Systems »
● Exécutif temps réel embarqué diffusé sous licence libre (GPL avec exception)
● Ce n'est pas exactement un système d'exploitation car l'application est « liée » au noyau → un seul processus mais plusieurs « threads »
● Programmation C, C++, Ada● Plus de 100 BSP disponibles pour 20 architectures● API RTEMS « classique » ou POSIX● Utilisé par EADS Astrium, ESA, NASA, etc.

40Logiciels libres et SE
RTEMS, suite
● RTEMS est un exécutif TR :– Un seul processus
– Beaucoup plus petit qu'un OS → en sélectionnant les composants on peut arriver à une taille de quelques dizaines de Ko :-)
– Pas (peu) de support MMU
– De nombreuses fonctionnalités sont optionnelles : réseau, système de fichiers, etc.
– Configuration statique de l'application
● Permet d'ajouter « facilement » API, ordonnanceur● Léger, environ 600K lignes pour la version 4.11 (15 M
pour le noyau Linux)

41Logiciels libres et SE
Les outils libres

42Logiciels libres et SE
Typologie des outils
● Outils de base → « toolchain » + mise au point → GCC, GDB, LLVM
● IDE → Eclipse (?)● Construction de distribution → Buildroot, Yocto/OE● Émulation / simulation → QEMU● Gestion de version (Git, SVN)
→ Les meilleurs de ces outils existent dans le monde du logiciel libre :-)

43Logiciels libres et SE
Production de distribution (Linux)
● Un outil crée la distribution à partir des sources des composants adaptés en appliquant des « patch »
● Il ne s'agit pas de distribution mais d'outil de création de distribution
● L'outil ne fournit pas les sources mais les règles de production et prend en compte les dépendances
● L'outil peut produire la chaîne de compilation croisée● L'outil produit les différents éléments de la distribution
– Image du bootloader
– Noyau Linux
– Images du root-filesystem
● Meilleure solution qu'une distribution « générique »– sécurité
– traçabilité

44Logiciels libres et SE
Les principaux outils disponibles
● Yocto/OpenEmbedded– Moteur écrit en Python
– Très puissant mais lourd
– Basé sur des fichiers de configuration
● Buildroot– Basé sur la commande « make »
– Au départ un démonstrateur pour uClibc
– Désormais un véritable outil, bien maintenu !
– Approche statique (pas de paquets)
● OpenWrt– Dérivé de BR
– Orienté vers les IAD (Internet Access Device)
– Gère les paquets binaires

45Logiciels libres et SE
Buildroot

46Logiciels libres et SE
Buildroot
● Lié au projet uClibc (micro-C-libc) = libC plus légère que la Glibc
● But initial: produire des root-filesystem simples pour tester uClibc
● Moteur uniquement basé sur des fichiers Makefile et quelques scripts-shell →utilisation de GNU-Make
● Outil de configuration utilise le langage Kconfig● Peut produire la chaîne de compilation (uClibc, Glibc,
Eglibc, ...) ou importer une chaîne existante ● Approche statique● Pas de version « officielle » avant 2009 (2009.02)

47Logiciels libres et SE
Buildroot aujourd’hui
● Repris en 2009 par Peter Korsgaard et Thomas Petazzoni
● Une version officielle tous les 3 mois: 2009.02, ... 2012.11, ..., 2015.02
● Projet géré sous Git : http://git.buildroot.net/buildroot● Bonne documentation :
http://buildroot.uclibc.org/docs.html● Plus de 1200 composants adaptés (2015.02)● Support CPU x86, ARM, PowerPC, SH4, ...● Il est désormais simple d’ajouter un support de carte
par des fichiers de configuration● Projets très dynamique !

48Logiciels libres et SE
Yocto / OE
● Similaire à BR mais plus évolué et modulaire● Utilisé par les éditeurs pour leurs produits commerciaux
→ Wind River● Utilisé par les fabricants de matériel pour les BSP
(Board Support Package) → Freescale, Gumstix, TI, ...● Yocto n'est pas une distribution mais fournit des
« templates » et outils pour créer des distributions → « méta données » organisées en couches (layers)
– Support matériel (meta-intel, meta-raspberrypi)
– Distributions (meta-yocto, meta-angstrom)
– Composants « métier » (meta-ivi) → GENIVI
http://layers.openembedded.org/layerindex
It's not an embedded Linux distribution
– it creates a custom one for you

49Logiciels libres et SE
Principe des « layers »

50Logiciels libres et SE
« Workflow » OE

51Logiciels libres et SE
Émulateur QEMU
● Émulateur de matériel initialement développé par Fabrice Bellard, diffusé sous GPL v2
● Exécuté dans l'espace utilisateur de Linux● Permet d'émuler diverses architectures: x86, PowerPC,
ARM, etc.● Émulation de carte complète → outil de
développement, mise au point, test automatique● Outil de certification DO-178 (Adacore/Couverture)
http://www.open-do.org/projects/couverture● Désormais, large communauté avec dépôt Git sur
http://git.savannah.gnu.org/cgit/qemu.git
52Logiciels libres et SE
Open Hardware

53Logiciels libres et SE
(R)évolution du matériel
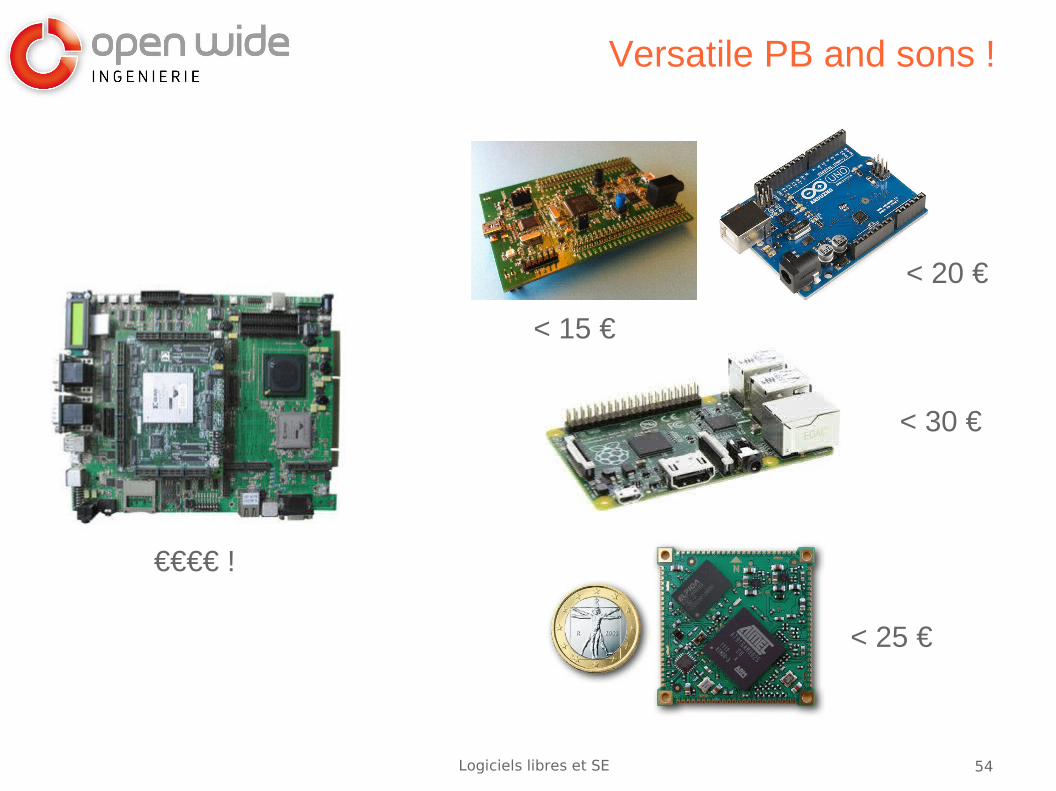
● Évolution du x86 vers ARM● Création d'un marché autour des « hobbyistes » en
électronique– Arduino, Raspberry Pi & friends
– Adafruit, Snootlab & friends
● Les professionnels utilisent parfois ces plate-formes ou du moins profitent de la baisse des coûts → attention au choix !
● Développement et conception simplifiés– généralisation d'un open-hardware pragmatique
– utilisation de modules CPU
– nouveaux langages (HTML5, Python)
● Nouveaux canaux de distribution et plate-formes de financement (kickstarter, ...)
54Logiciels libres et SE
Versatile PB and sons !
€€€€ !
< 20 €
< 30 €
< 25 €
< 15 €

55Logiciels libres et SE
Cependant...
● Certaines plate-formes génériques permettent de créer une « maquette » mais difficilement la version définitive → qualité insuffisante
● La connectivité nécessaire n'est pas toujours disponible– Wi-Fi
– BT
– Capteurs divers
● Un créateur n'est PAS un développeur logiciel et encore moins un intégrateur système → « fusion » art / design / technologie
● Quelques plates-forme dédiées sont désormais disponibles → WeIO (démo!)
● Pour l'industrie ne pas oublier la durée de maintenance !

56Logiciels libres et SE
Module WeIO

57Logiciels libres et SE
Co-design

58Logiciels libres et SE
Situation actuelle
● Les systèmes embarqués deviennent de plus en plus complexes
– Hier → RTOS mono-tâche (1 seule application)
– Aujourd'hui → système multitâche proche d'un OS classique (Linux, Android, …)
● Exemples de systèmes :– Encodeur / décodeur vidéo HD
– Système « mixte » temps réel et traitement des données (banc de test)
● Le CPU n'est pas forcément capable de répondre aux exigences fonctionnelles du système
● L'utilisation du multi-cœur améliore les choses mais décale le problème (et augmente prix + consommation)

59Logiciels libres et SE
Évolution de la conception
● On travaille maintenant au niveau système (ou fonctionnalité) et non au niveau porte logique
● Les fonctionnalités peuvent être implantées dans des composants spécifiques de type ASIC (Application Specific Integrated Circuit). On parle alors de Système sur Silicium « SoC » (System on Chip).
● Les fonctionnalités peuvent être implantées dans des composants logiques programmables de type FPGA (Field Programmable Gate Array). On parle alors de système « SoPC » (System on Programmable Chip).
● Le plus souvent le système dispose d'un CPU (avec OS) + d'un accélérateur matériel pour des tâches dédiés (compression, génération de signal, …)
● L'association des deux parties correspond au « co-design »

60Logiciels libres et SE
Exemple de système● Le processeur est en général externe→ SoC associé à
un FPGA ● Exemple de SoC : i.MX (Freescale), AM335x (TI)● Exemple de FPGA : Altera Cyclone, Xilinx
Spartan/Virtex ● Système hybride : Armadeus, Zynq

61Logiciels libres et SE
Avantages du co-design
● L'OS – et donc le CPU - est déchargé de tâches très coûteuses (voire inaccessibles) en calcul logiciel
● L'approche FPGA permet de garantir la souplesse → utilisation d'un langage de programmation (Verilog ou VHDL) → portabilité sur plusieurs modèles de FPGA
● Cette même approche garantit la propriété intellectuelle dans le cas de licences parfois contraignantes
– La fonctionnalité « métier » dans le FPGA
– Le pilote (GPL si Linux) est une simple interface
● On trouve des bibliothèques fonctionnelles (des « IP ») comme avec le logiciel classique → €€€ !
● Le co-design peut également concerner l'association µP (CPU) / micro-contrôleur reliés – par exemple - par un bus de type SPI

62Logiciels libres et SE
Association µC / Linux
● Cette approche « hybride » assure un faible coût en garantissant les performances

63Logiciels libres et SE
Système Linux « pur »
● Cette approche nécessite souvent un adaptation coté noyau → temps réel (Xenomai, PREEMPT-RT, …)

64Logiciels libres et SE
Choix du matériel
● Solution 1 :– Module type SoC
– FPGA ajouté à la carte finale
– Nécessite un design matériel
● Solution 2 :– Module SoC intégrant directement un FPGA
– Xilinx (Zynq), Altera, Armadeus APF27/APF51
– Pas (ou peu) de design matériel
– La demande du marché pousse ce type de solution

65Logiciels libres et SE
Cas d'exemple
● Un système nécessite une horloge de synchronisation (période = 1 ms)
– Réalisable sur certains systèmes (tâche périodique sur un GPIO) → Raspberry Pi/ARM + Linux-TR
– Impossible à réaliser sur d'autres architectures (x86) sans 1 carte PCI dédiée (€€€)
● Une solution hybride utilise :– Un système sous Linux (architecture x86, ARM, …) non
TR
– Un contrôleur matériel FPGA sur bus USB
– Simple à mettre en place en langage HDL
– Le calculateur Linux pilote le contrôleur par message USB mais ne gère pas le TR → insensible aux variations de charge

66Logiciels libres et SE
Raspberry Pi + FPGA
KNJN DragonPCI-E
Bugblat sur bus local
USB

67Logiciels libres et SE
Questions ?