linear regression models cgfm
TRANSCRIPT

Chaohui Guo & Friederike Meyer
PATTERN RECOGNITION AND MACHINE LEARNINGCHAPTER 3: LINEAR MODELS FOR REGRESSION

Purposes of linear regression
• Specifying relationship between independent variables (input vector x) and dependent variables (target values t)
• Assumption: Targets are noisy realization of an underlying functional relationship
• Goal: model the predictive distribution p(t|x)
• A general linear model (GLM) explains this relationship in terms of a linear combination of the IV + error: tn = y(xn,β) + εn

GLM: Illustration of matrix form
=
e+y X
N
1
N N
1 1p
p
eXy eXy
),0(~ 2INe ),0(~ 2INe
N: number of scansp: number of regressors

Parameter estimation
eXy
= +
e
2
1
Ordinary least squares estimation
(OLS) (assuming i.i.d. error):
yXXX TT 1)(ˆ
Objective:estimate β tominimize
N
tte
1
2
y X

ye
Design space defined by X
x1
x2
GLM: A geometric perspective
PIRRye
PIR
Rye
ˆ Xy
yXXX TT 1)(ˆ yXXX TT 1)(ˆ
TT XXXXPPyy
1)(
ˆ
TT XXXXP
Pyy1)(
ˆ
Residual forming matrix
R
Projection matrix P
OLS estimates
LS es mate of the data ∟ projec on of data vector onto design matrix space
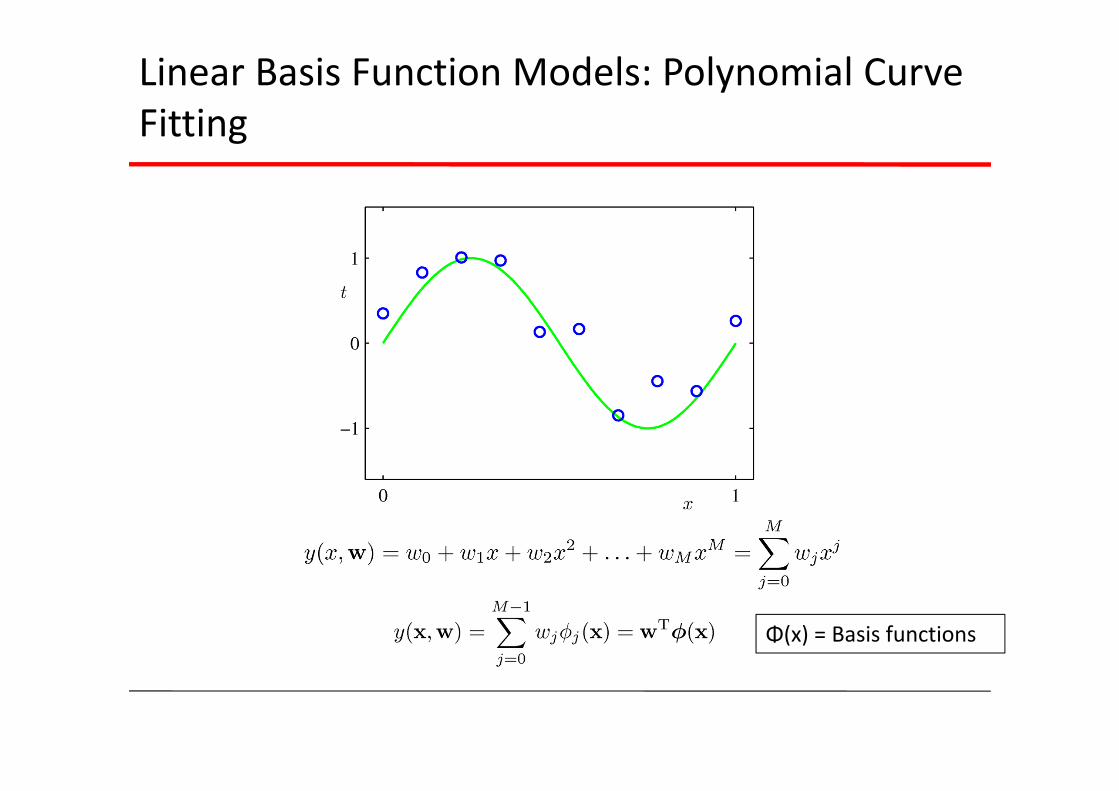
Linear Basis Function Models: Polynomial Curve Fitting
Φ(x) = Basis functions
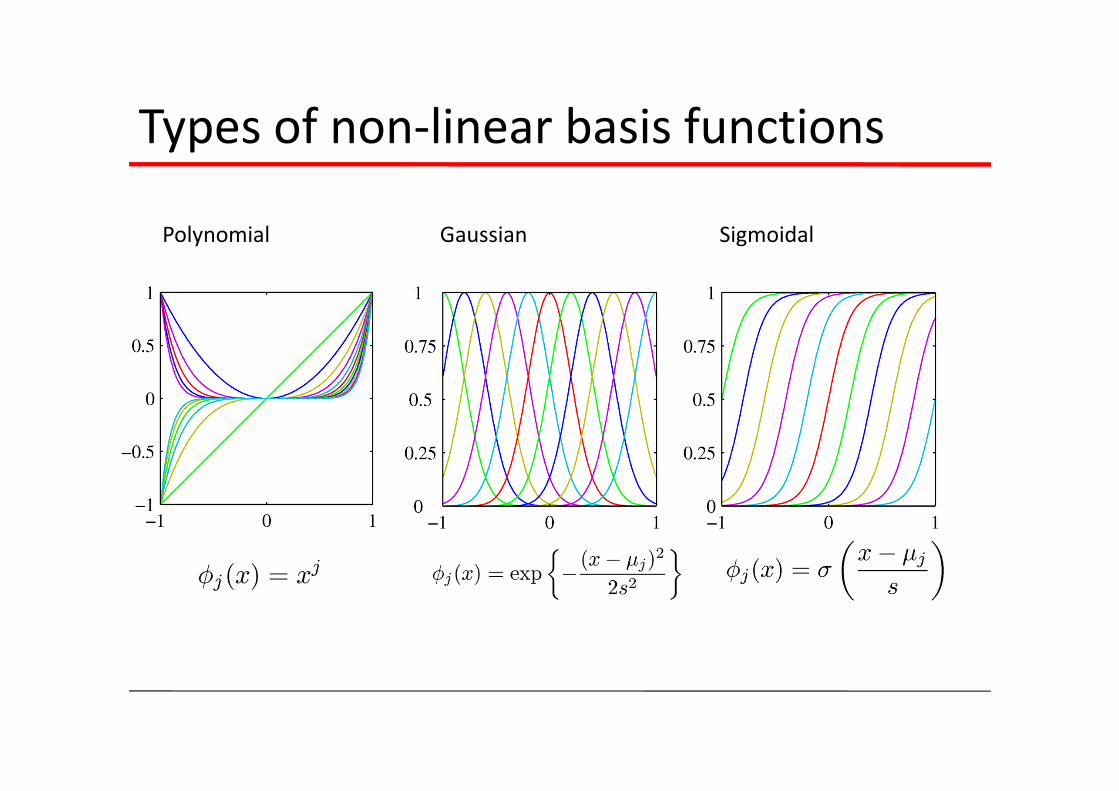
Types of non‐linear basis functions
Polynomial Gaussian Sigmoidal

Estimation of ω: Classical (frequentist) techniques
• Using an “estimator” to determine specific value for parameter vector ω e.g. Sum‐of‐squares error function (SSQ):
• Minimizing function in respect to ω: ω*• t = y(x, ω*)

Reducing over‐fitting: Regularized Least Squares
Control of over‐fitting: Regularization of error function
which is minimized by
Data‐dependent error + Regularization term
λ : regularization coefficient.
OLS‐solution + extension
(λ/2)ωTω

Regularized Least Squares
Applying more general regularizer:
How to choose appropriate λ‐value?

Classical techniques: Maximum Likelihood and Least Squares
• Assume observations from a deterministic function with added Gaussian noise:
which implies a Gaussian conditional distribution:
• Given observed inputs, (independently drawn), and targets, , we obtain the likelihood function
where

Classical techniques: Maximum Likelihood and Least Squares
Taking the logarithm, we get
Computing the gradient and setting it to zero yields
Solving for w , we get
OLS estimate
Conclusion: Frequentist approach & forecast on Bayesian methods
Frequentist approach • Seeking point estimate of
unknown parameter ω
• maximizing likelihood inappropriately complex models and over‐fitting (solution: Regularization, but: number/type of BF still important )
Bayesian approach: • Characterizing uncertainty in
ω through probabilitydistribution p(ω)
• averaging of multiple posterior probability parameter distributions [p(ω|t)]

Bayesian linear regression: Parameter distribution
• β: assumed known constant
• Likelihood function: p(t|ω) with Gaussian noise exponential of quadratic function of ω
• Gaussian prior: p(ω) = N(ω|m0,S0)
• Gaussian posterior: p(ω|t) = [p(D|ω)*p(ω)]/p(D) p(ω|t) = N(ω|mN,SN) mN= SN (S0‐1m0 + βΦTt) SN = S0‐1 + βΦTΦ

Bayesian Linear Regression: Common cases
• A common choice for the prior is a zero‐mean isotropic Gaussian:
for which
•Maximization of posterior distribution = minimization ofSSQ with addition of quadratic error term (λ = α/β)

Bayesian Linear Regression: An Example of sequential learning
• Linear model: y(x,w) = ω0 + ω1x (straight‐line fitting)
• Generation of synthetic data: f(y,a) = a0 + a1x a0 = ‐0.3, a1 = 0.5 Gaussian noise(std, β‐1) = 0.2 β = (1/0.2)2 = 25 α = 2.0 U(x|‐1,1)

Bayesian Linear Regression: An Example of sequential learning
Likelihoodp(t|x,ω)
Prior[p(ω)] (+p(t|x,ω) gives)/Posterior p(ω|t)
Data Space (6 samples y(x,w) drawn from posterior distribution of ω)

Bayesian Linear Regression: An Example of sequential learning
Likelihood Prior/Posterior Data Space
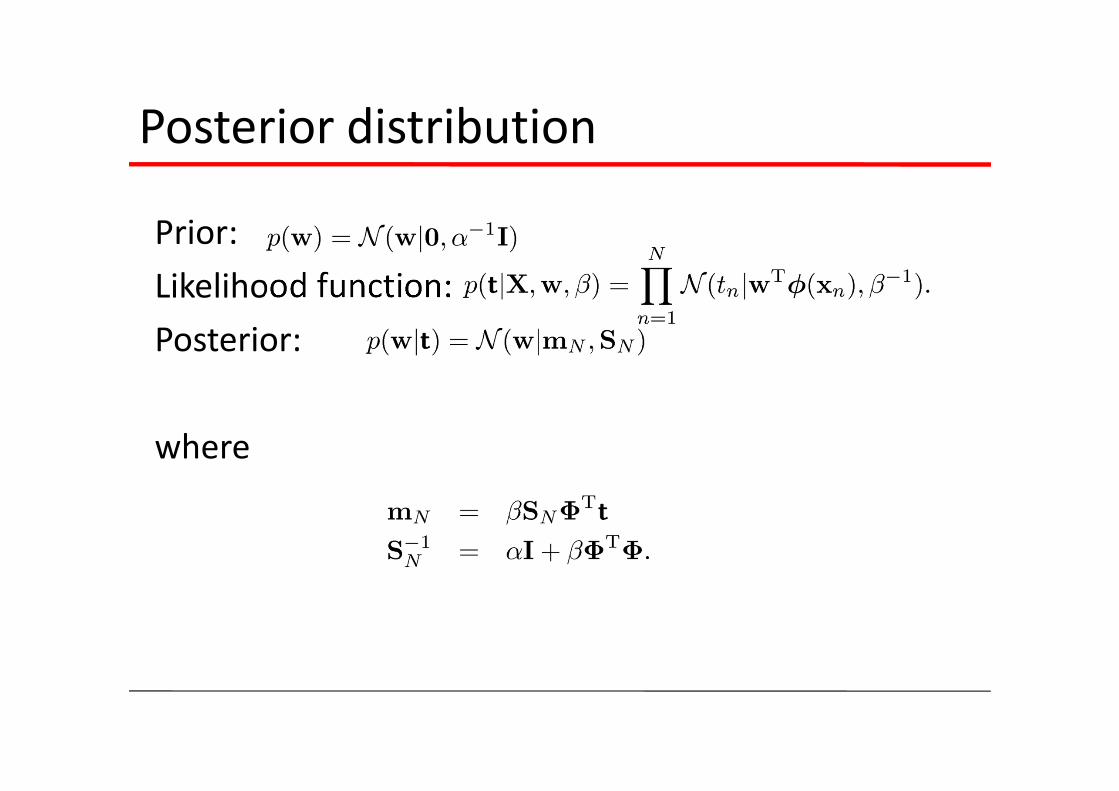
Posterior distribution
Prior: Likelihood function: Posterior:
where

Predictive Distribution (1)
Predict t for new values x:
where
Sum rule
Product rule

Predictive Distribution (2)Example: Sinusoidal data, 9 Gaussian basis functions

Predictive Distribution (3)Example: Sinusoidal data, 9 Gaussian basis functions
25 data points

Bayesian Model Comparison (1)
How do we choose the ‘right’ model? L models
Bayes Factor: ratio of evidence for two models
Posterior Prior Model evidence

Bayesian Model Comparison (2)
Simple situation:For a given model with a single parameter, , consider the approximation
where the posterior is assumed to be sharply peaked, and prioris flat.

Bayesian Model Comparison (3)
Taking logarithms, we obtain
With M parameters, all assumed to have the same ratio , we get
Negative
Negative and linear in M.

Bayesian Model Comparison (4)
data fit and model complexity, favour intermediate complexity:
D1 D2

Practical use
‐How good are these assumptions?‐What other functions to be use?‐Bayesian framework avoids the problem of over‐fitting and allows models to be
compared on the basis of the training data alone. However, due to the dependence on the priors, a practical application is to keep an independent test set of data.

Predictive distribution
Predictive distribution
A simpler approximation, known as model selection, is to use the model with the highest evidence.

The Evidence Approximation (1)
The fully Bayesian predictive distribution is given by
but this integral is intractable. Approximate with
where is the mode of , which is assumed to be sharply peaked; a.k.a. evidence approximation.

The Evidence Approximation (2)
From Bayes’ theorem we have
and if we assume prior to be flat we see that
Final evidence function:

The Evidence Approximation (3)
To maximise , first derivative respect to
Derivative Respect to
Iterative procedure: Initial choice for and , calculate for mN and r. these values are re‐estimate and , until convergence.

The Evidence Approximation (4)
In the limit , and we can consider using the easy‐to‐compute approximation

The Evidence Approximation (4)
Example: sinusoidal data,

Discussion
‐ Are they always consistent?‐ Bayesian vs. Frequencist
‐ Sequential learning‐ Model selection‐ How they different with a flat prior?

Model Selection(1.3)
Cross‐Validation
Akaike information criterion (AIC) :

Sequential Learning
Data items considered one at a time (a.k.a. online learning); use stochastic (sequential) gradient descent:
This is known as the least‐mean‐squares (LMS) algorithm. Issue: how to choose ?