linearized lateral-directional equations of motion · 11/12/18 9 oblique wing concepts...
TRANSCRIPT

11/12/18
1
Linearized Lateral-Directional Equations of Motion
Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
Copyright 2018 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE331.html
http://www.princeton.edu/~stengel/FlightDynamics.html
Reading:Flight Dynamics
574-591
Learning Objectives
1
• 6th-order -> 4th-order -> hybrid equations• Dynamic stability derivatives • Dutch roll mode• Roll and spiral modes
6-Component Lateral-Directional Equations of Motion
x1x2x3x4x5x6
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
= xLD6
vyprφψ
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
=
Side VelocityCrossrange
Body-Axis Roll RateBody-Axis Yaw Rate
Roll Angle about Body x AxisYaw Angle about Inertial x Axis
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥ 2
!v = YB /m + gsinφ cosθ − ru + pw!yI = cosθ sinψ( )u + cosφ cosψ + sinφ sinθ sinψ( )v + −sinφ cosψ + cosφ sinθ sinψ( )w!p = IzzLB + IxzNB − Ixz Iyy − Ixx − Izz( ) p + Ixz
2 + Izz Izz − Iyy( )⎡⎣ ⎤⎦r{ }q( )÷ Ixx Izz − Ixz2( )
!r = IxzL B+IxxNB − Ixz Iyy − Ixx − Izz( )r + Ixz2 + Ixx Ixx − Iyy( )⎡⎣ ⎤⎦ p{ }q( )÷ Ixx Izz − Ixz
2( )!φ = p + qsinφ + r cosφ( ) tanθ!ψ = qsinφ + r cosφ( )secθ

11/12/18
2
4- Component Lateral-Directional
Equations of MotionNonlinear Dynamic Equations, neglecting
crossrange and yaw angle
x1x2x3x4
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
= xLD4
Eurofighter Typhoon
vprφ
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
=
Side VelocityBody-Axis Roll RateBody-Axis Yaw Rate
Roll Angle about Body x Axis
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥ 3
!v = YB /m + gsinφ cosθ − ru + pw
!p = IzzLB + IxzNB − Ixz Iyy − Ixx − Izz( ) p + Ixz2 + Izz Izz − Iyy( )⎡⎣ ⎤⎦r{ }q( )÷ Ixx Izz − Ixz
2( )!r = IxzLB + IxxNB − Ixz Iyy − Ixx − Izz( )r + Ixz
2 + Ixx Ixx − Iyy( )⎡⎣ ⎤⎦ p{ }q( )÷ Ixx Izz − Ixz2( )
!φ = p + qsinφ + r cosφ( ) tanθ
!v = YB /m + gsinφ cosθN − ruN + pwN
!p = IzzLB + IxzNB( ) Ixx Izz − Ixz2( )
!r = IxzLB + IxxNB( ) Ixx Izz − Ixz2( )
!φ = p + r cosφ( ) tanθN
Lateral-Directional Equations of Motion Assuming Steady, Level Longitudinal Flight
Longitudinal variables are constant
qN = 0γN = 0θN =αN
4

11/12/18
3
Lateral-Directional Force and Moments in Steady, Level Flight
YB = CYB
12ρNVN
2S
LB = ClB
12ρNVN
2Sb
NB = CnB
12ρNVN
2Sb
Body-Axis Side ForceBody-Axis Rolling MomentBody-Axis Yawing Moment
Dynamic pressure is constant
5
Linearized Lateral-Directional Equations of Motion in Steady,
Level Flight
6
11/12/18
4
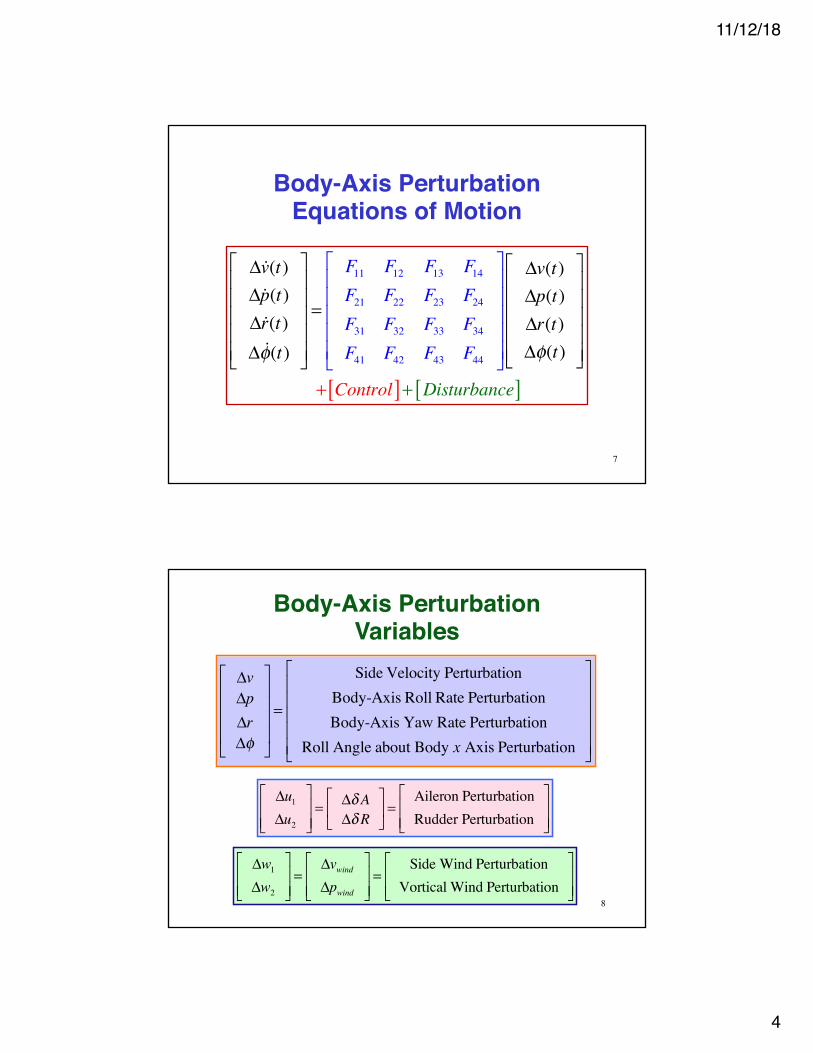
Body-Axis Perturbation Equations of Motion
7
Δ !v(t)Δ!p(t)Δ!r(t)Δ !φ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
F11 F12 F13 F14F21 F22 F23 F24F31 F32 F33 F34F41 F42 F43 F44
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
Δv(t)Δp(t)Δr(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
+ Control[ ]+ Disturbance[ ]
Body-Axis Perturbation Variables
Δu1Δu2
⎡
⎣⎢⎢
⎤
⎦⎥⎥= ΔδA
ΔδR⎡
⎣⎢
⎤
⎦⎥ =
Aileron PerturbationRudder Perturbation
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Δw1Δw2
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
ΔvwindΔpwind
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
Side Wind PerturbationVortical Wind Perturbation
⎡
⎣⎢⎢
⎤
⎦⎥⎥
ΔvΔpΔrΔφ
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
=
Side Velocity PerturbationBody-Axis Roll Rate PerturbationBody-Axis Yaw Rate Perturbation
Roll Angle about Body x Axis Perturbation
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
8

11/12/18
5
Vortical Wind PerturbationsWind Rotor Wake Vortex
TangentialVelocity,
ft/s
Radius, ft
Wake Vortex
Wind Rotor9
Dimensional Stability Derivatives
F11 F12 F13 F14F21 F22 F23 F24F31 F32 F33 F34F41 F42 F43 F44
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
Stability Matrix
=
Yv Yp +wN( ) Yr −uN( ) gcosθNLv Lp Lr 0
Nv Np Nr 0
0 1 tanθN 0
#
$
%%%%%%
&
'
((((((
10
11/12/18
6
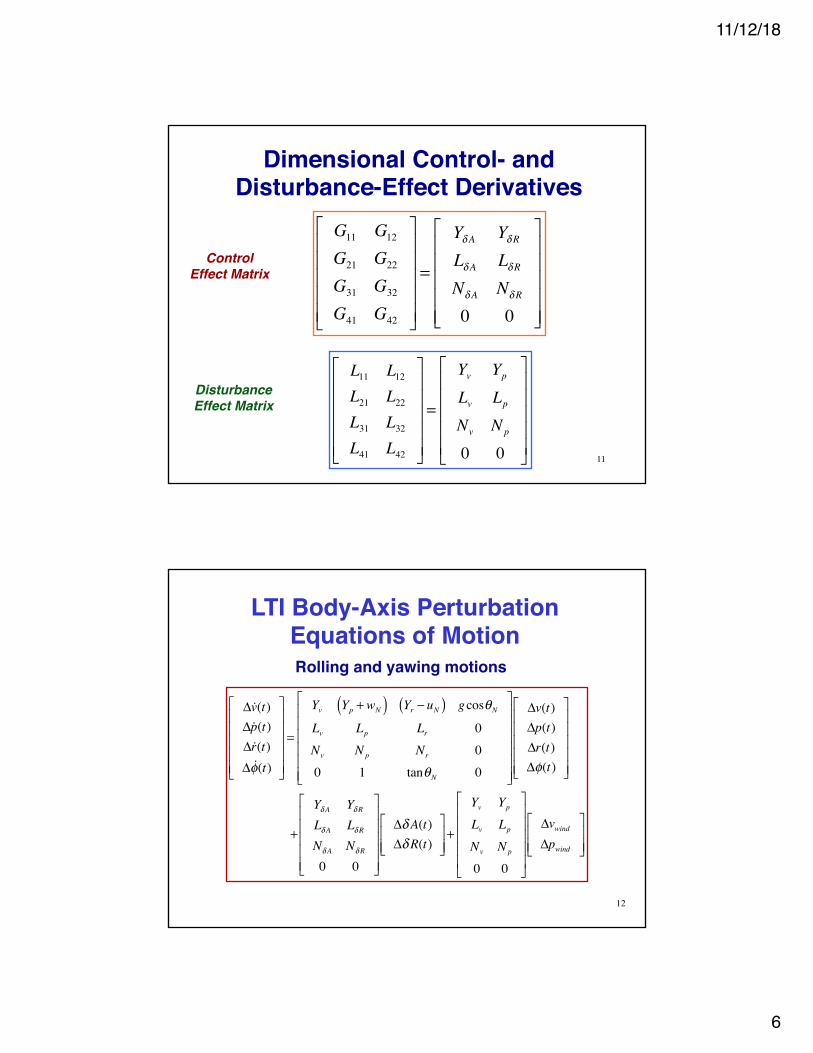
Dimensional Control- and Disturbance-Effect Derivatives
G11 G12G21 G22
G31 G32
G41 G42
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
YδA YδRLδA LδR
NδA NδR
0 0
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
L11 L12L21 L22L31 L32L41 L42
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
Yv YpLv Lp
Nv Np
0 0
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
Control Effect Matrix
DisturbanceEffect Matrix
11
Rolling and yawing motions
LTI Body-Axis Perturbation Equations of Motion
12
Δ !v(t)Δ!p(t)Δ!r(t)Δ !φ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
Yv Yp +wN( ) Yr − uN( ) gcosθN
Lv Lp Lr 0
Nv Np Nr 0
0 1 tanθN 0
⎡
⎣
⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥
Δv(t)Δp(t)Δr(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
+
YδA YδRLδA LδR
NδA NδR
0 0
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
ΔδA(t)ΔδR(t)
⎡
⎣⎢⎢
⎤
⎦⎥⎥+
Yv YpLv Lp
Nv Np
0 0
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
ΔvwindΔpwind
⎡
⎣⎢⎢
⎤
⎦⎥⎥

11/12/18
7
Linearized Lateral-Directional Response to Initial Yaw Rate
~Roll response of roll angle
~Spiral response of crossrange
~Spiral response of yaw angle
~Dutch-roll response of side velocity
~Dutch-roll response of roll and yaw rates
13
Asymmetrical Aircraft: DC-2-1/2
14
DC-3 with DC-2 right wingQuick fix to fly aircraft out of harm�s way during WWII

11/12/18
8
Asymmetric Aircraft - WWIIBlohm und Voss, BV 141 B + V 141 derivatives
B + V P.202
Recent Asymmetric AircraftScaled Composites Ares
Scaled Composites Boomerang

11/12/18
9
Oblique Wing Concepts• High-speed benefits of wing sweep without the
heavy structure and complex mechanism required for symmetric sweep
• Blohm und Voss, R. T. Jones , Handley-Page concepts
• Improved supersonic L/D by reduction of shock-wave interference and elimination of the fuselage in flying-wing version
17
Handley-Page Oblique Wing Concepts• Advantages
– 10-20% higher L/D @ supersonic speed (compared to delta planform)
– Flying wing: no fuselage• Issues
– Which way do the passengers face?
– Where is the cockpit?– How are the engines and vertical
surfaces swiveled?– What does asymmetry do to
stability and control?
18
11/12/18
10
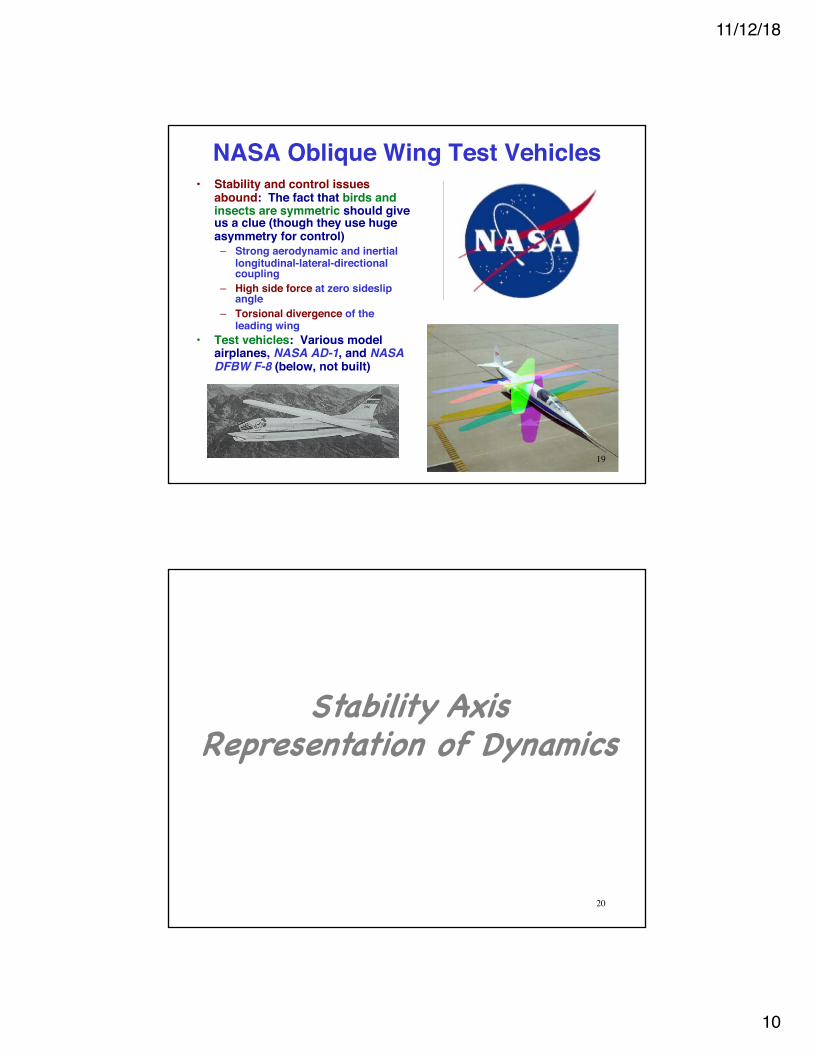
NASA Oblique Wing Test Vehicles• Stability and control issues
abound: The fact that birds and insects are symmetric should give us a clue (though they use huge asymmetry for control)– Strong aerodynamic and inertial
longitudinal-lateral-directional coupling
– High side force at zero sideslip angle
– Torsional divergence of the leading wing
• Test vehicles: Various model airplanes, NASA AD-1, and NASA DFBW F-8 (below, not built)
19
Stability Axis Representation of Dynamics
20

11/12/18
11
Stability Axes• Stability axes are an alternative set of body axes• Nominal x axis is offset from the body centerline by
the nominal angle of attack, αN
21
Transformation from Original Body Axes to Stability Axes
HBS =
cosαN 0 sinαN
0 1 0−sinαN 0 cosαN
#
$
%%%
&
'
(((
ΔuΔvΔw
"
#
$$$
%
&
'''S
= HBS
ΔuΔvΔw
"
#
$$$
%
&
'''B
ΔpΔqΔr
"
#
$$$
%
&
'''S
= HBS
ΔpΔqΔr
"
#
$$$
%
&
'''B
Side velocity (Δv) and pitch rate (Δq) are unchanged by the transformation 22
11/12/18
12
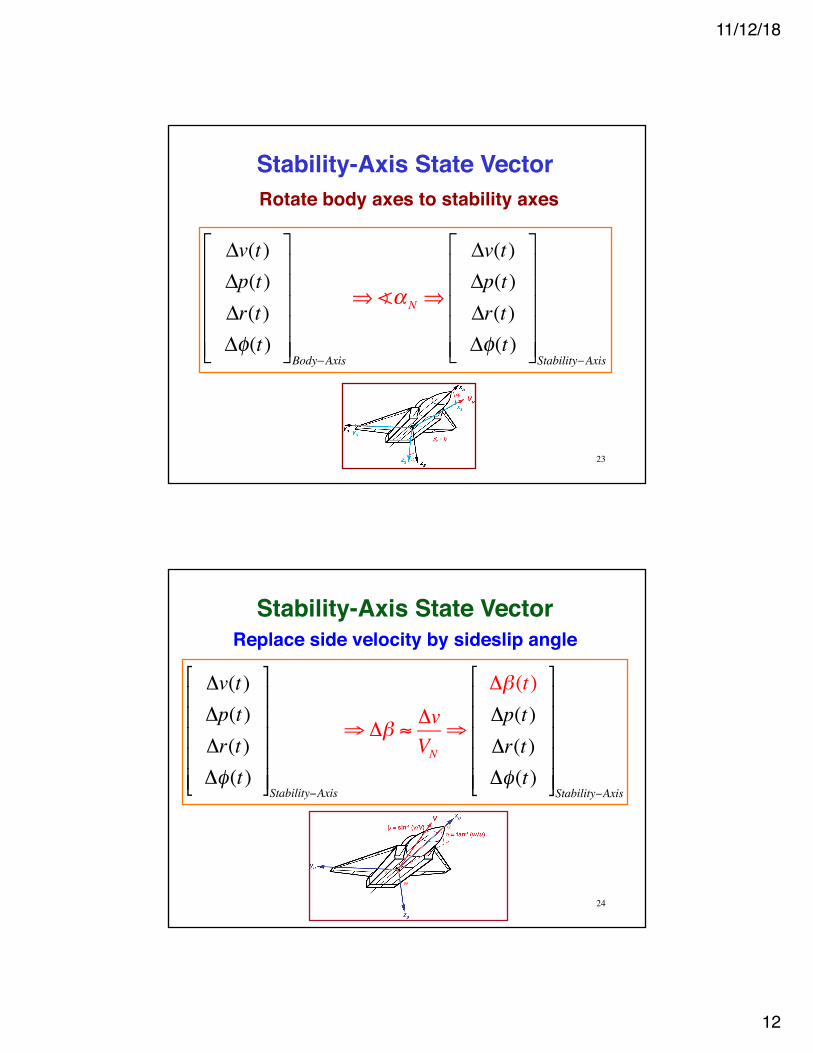
Stability-Axis State Vector Rotate body axes to stability axes
Δv(t)Δp(t)Δr(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Body−Axis
⇒!αN ⇒
Δv(t)Δp(t)Δr(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Stability−Axis
23
Stability-Axis State Vector
Δv(t)Δp(t)Δr(t)Δφ(t)
#
$
%%%%%
&
'
(((((Stability−Axis
⇒Δβ ≈ΔvVN
⇒
Δβ(t)Δp(t)Δr(t)Δφ(t)
#
$
%%%%%
&
'
(((((Stability−Axis
Replace side velocity by sideslip angle
24
11/12/18
13
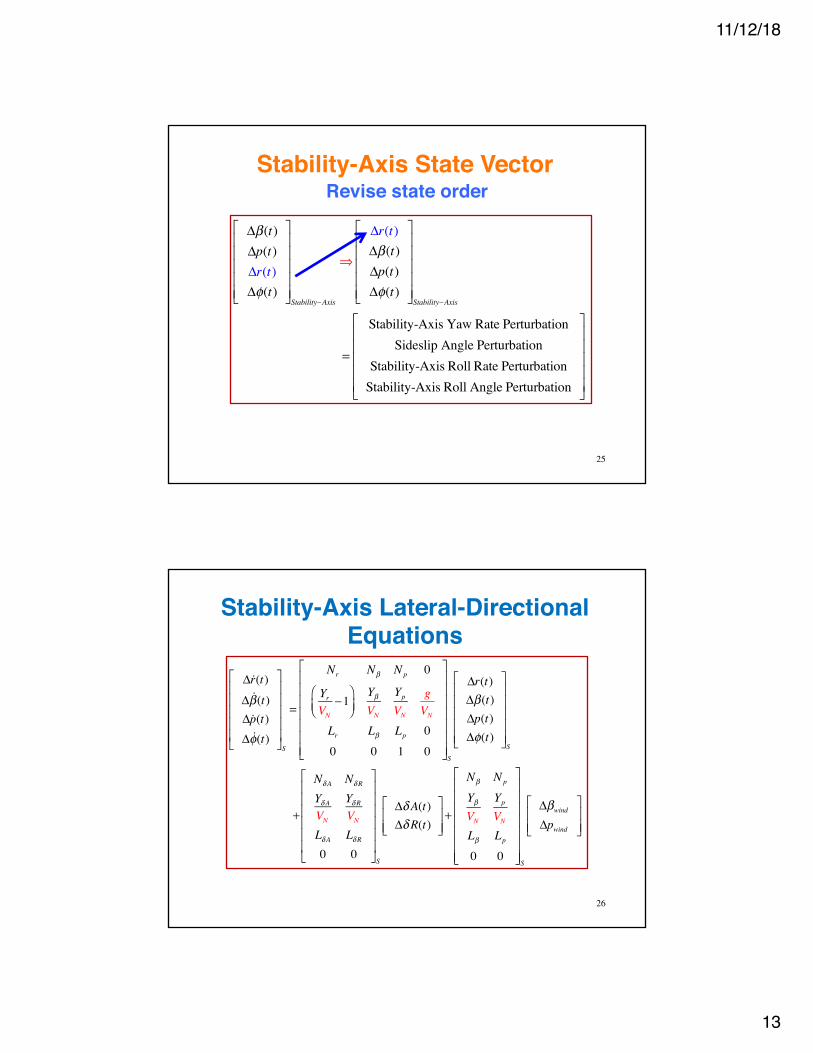
Stability-Axis State VectorRevise state order
25
Δβ(t)Δp(t)Δr(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Stability−Axis
⇒
Δr(t)Δβ(t)Δp(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Stability−Axis
=
Stability-Axis Yaw Rate PerturbationSideslip Angle Perturbation
Stability-Axis Roll Rate PerturbationStability-Axis Roll Angle Perturbation
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
Stability-Axis Lateral-Directional Equations
26
Δ!r(t)
Δ !β(t)Δ!p(t)Δ !φ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥S
=
Nr Nβ Np 0
YrVN
−1⎛⎝⎜
⎞⎠⎟
Yβ
VN
YpVN
gVN
Lr Lβ Lp 0
0 0 1 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥S
Δr(t)Δβ(t)Δp(t)Δφ(t)
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥S
+
NδA NδR
YδAVN
YδRVN
LδA LδR
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥S
ΔδA(t)ΔδR(t)
⎡
⎣⎢⎢
⎤
⎦⎥⎥+
Nβ Np
Yβ
VN
YpVN
Lβ Lp
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥S
Δβwind
Δpwind
⎡
⎣⎢⎢
⎤
⎦⎥⎥

11/12/18
14
Why Modify the Equations?Dutch-roll motion is primarily described by stability-
axis yaw rate and sideslip angle
Roll and spiral motions are primarily described by stability-axis roll rate and roll angle
Stable Spiral
Unstable SpiralRoll
Dutch Roll, top Dutch Roll, front
27
Why Modify the Equations?
FLD =FDR FRS
DR
FDRRS FRS
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
FDR smallsmall FRS
⎡
⎣⎢⎢
⎤
⎦⎥⎥≈
FDR 00 FRS
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Effects of Dutch roll perturbations on Dutch roll motion
Effects of Dutch roll perturbations on roll-spiral motion
Effects of roll-spiral perturbations on Dutch roll motion
Effects of roll-spiral perturbations on roll-spiral motion
... but are the off-diagonal blocks really small?
28

11/12/18
15
Stability, Control, and Disturbance Matrices
FLD =FDR FRS
DR
FDRRS FRS
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
Nr Nβ Np 0
YrVN
−1⎛⎝⎜
⎞⎠⎟
Yβ
VN
YpVN
gVN
Lr Lβ Lp 0
0 0 1 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
GLD =
NδA NδR
YδAVN
YδRVN
LδA LδR
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥
LLD =
Nβ Np
Yβ
VN
YpVN
Lβ Lp
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
Δx1Δx2Δx3Δx4
"
#
$$$$$
%
&
'''''
=
ΔrΔβ
ΔpΔφ
"
#
$$$$$
%
&
'''''
Δu1Δu2
"
#$$
%
&''=
ΔδAΔδR
"
#$
%
&'
Δw1Δw2
"
#$$
%
&''=
ΔδAΔδR
"
#$
%
&'
29
2nd-Order Approximate Modes of Lateral-Directional
Motion
30

11/12/18
16
2nd-Order Approximations in System Matrices
FLD =FDR 00 FRS
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
Nr Nβ 0 0
YrVN
−1⎛⎝⎜
⎞⎠⎟
Yβ
VN0 0
0 0 Lp 0
0 0 1 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
GLD =
NδR 0YδRVN
0
0 LδA
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥
LLD =
Nβ 0
Yβ
VN0
0 Lp
0 0
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥ 31
2nd-Order Models of Lateral-Directional Motion
Approximate Spiral-Roll Equation
Approximate Dutch Roll Equation
Δ!xDR =Δ!rΔ !β
⎡
⎣⎢⎢
⎤
⎦⎥⎥≈
Nr Nβ
YrVN
−1⎛⎝⎜
⎞⎠⎟
Yβ
VN
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
ΔrΔβ
⎡
⎣⎢⎢
⎤
⎦⎥⎥+
NδR
YδRVN
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥ΔδR +
Nβ
Yβ
VN
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥Δβwind
ΔxRS =ΔpΔ φ
#
$%%
&
'((≈
Lp 0
1 0
#
$%%
&
'((
ΔpΔφ
#
$%%
&
'((+
LδA0
#
$%%
&
'((ΔδA +
Lp
0
#
$%%
&
'((Δpwind
32
11/12/18
17
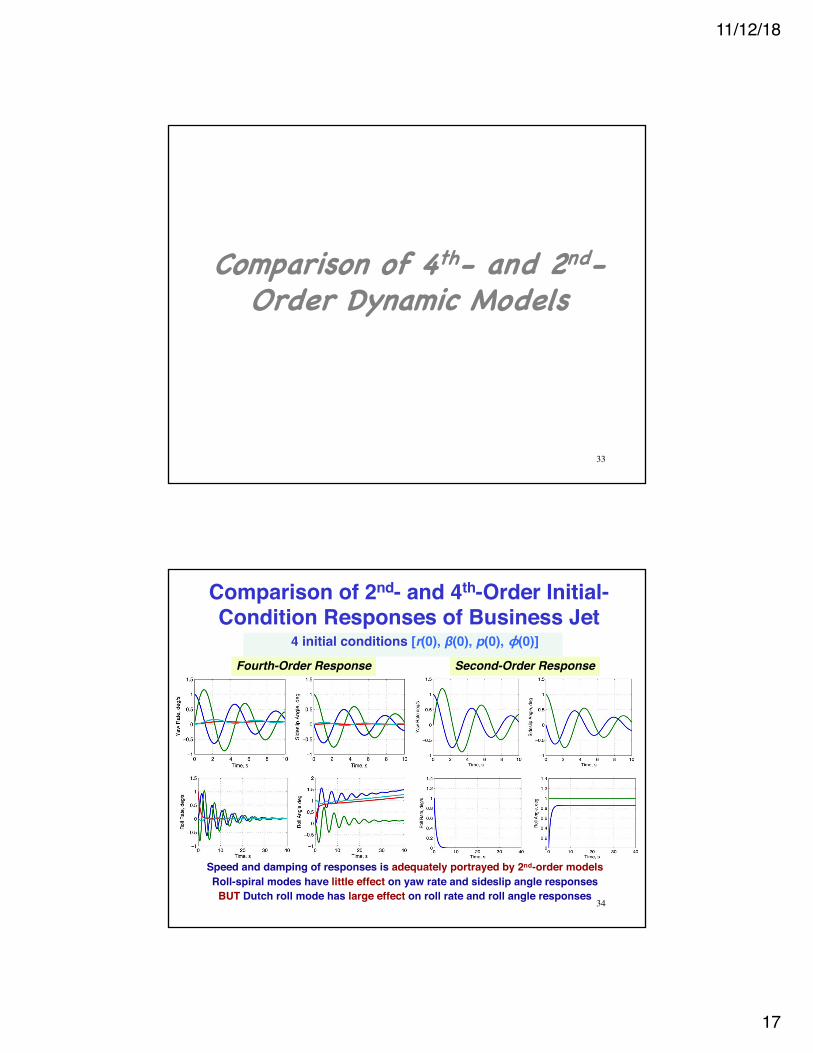
Comparison of 4th- and 2nd-Order Dynamic Models
33
Comparison of 2nd- and 4th-Order Initial-Condition Responses of Business Jet
Fourth-Order Response Second-Order Response
Speed and damping of responses is adequately portrayed by 2nd-order modelsRoll-spiral modes have little effect on yaw rate and sideslip angle responses
BUT Dutch roll mode has large effect on roll rate and roll angle responses34
4 initial conditions [r(0), β(0), p(0), ϕ(0)]
11/12/18
18
Next Time:Analysis of Time Response
Reading:Flight Dynamics298-313, 338-342
35
• Methods of time-domain analysis– Continuous- and discrete-time models– Transient response to initial conditions and inputs– Steady-state (equilibrium) response– Phase-plane plots– Response to sinusoidal input
Learning Objectives
Supplemental Material
36
11/12/18
19
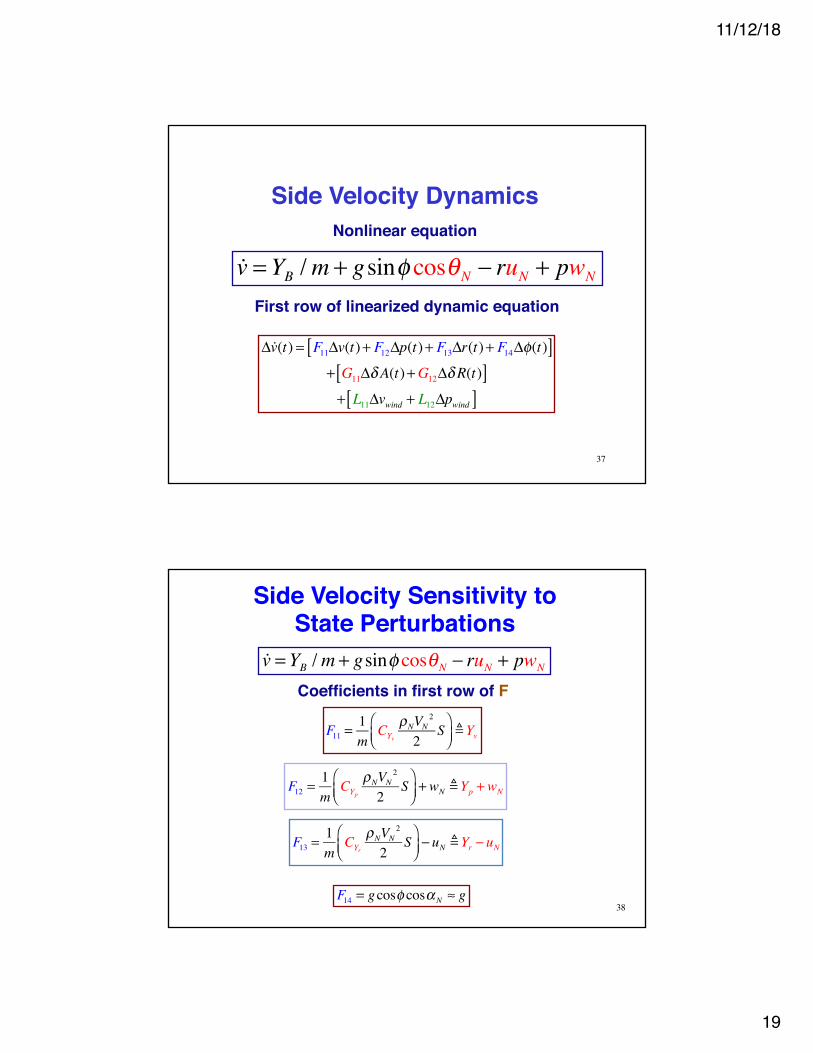
Side Velocity DynamicsNonlinear equation
First row of linearized dynamic equation
Δ !v(t) = F11Δv(t)+ F12Δp(t)+ F13Δr(t)+ F14Δφ(t)[ ]+ G11ΔδA(t)+G12ΔδR(t)[ ]+ L11Δvwind + L12Δpwind[ ]
37
!v = YB /m + gsinφ cosθN − ruN + pwN
F11 =
1m
CYv
ρNVN2
2S⎛
⎝⎜⎞⎠⎟! Yv
Coefficients in first row of F
Side Velocity Sensitivity to State Perturbations
38
F12 =
1m
CYp
ρNVN2
2S⎛
⎝⎜⎞⎠⎟+wN ! Yp +wN
F14 = gcosφ cosαN ≈ g
!v = YB /m + gsinφ cosθN − ruN + pwN
F13 =
1m
CYr
ρNVN2
2S⎛
⎝⎜⎞⎠⎟− uN ! Yr − uN

11/12/18
20
Side Velocity Sensitivity to Control and Disturbance Perturbations
G11 =1m
CYδA
ρNVN2
2S⎡
⎣⎢
⎤
⎦⎥ ! YδA
G12 =1m
CYδR
ρNVN2
2S⎡
⎣⎢
⎤
⎦⎥ ! YδR
Coefficients in first rows of G and L
L11 = −F11L12 = −F12
39
Roll Rate DynamicsNonlinear equation
Second row of linearized dynamic equation
40
!p = IzzLB + IxzNB( ) Ixx Izz − Ixz
2( )
Δ!p(t) = F21Δv(t)+ F22Δp(t)+ F23Δr(t)+ F24Δφ(t)[ ]+ G21ΔδA(t)+G22ΔδR(t)[ ]+ L21Δvwind + L22Δpwind[ ]

11/12/18
21
F21 = Izz
∂LB∂v
+ Ixz∂NB
∂v⎛⎝⎜
⎞⎠⎟ Ixx Izz − Ixz
2( ) ! Lv
Coefficients in second row of F
Roll Rate Sensitivity to State Perturbations
41
F24 = 0
!p = IzzLB + IxzNB( ) Ixx Izz − Ixz
2( )
F22 = Izz
∂LB∂p
+ Ixz∂NB
∂p⎛⎝⎜
⎞⎠⎟
Ixx Izz − Ixz2( ) ! Lp
F23 = Izz
∂LB∂r
+ Ixz∂NB
∂r⎛⎝⎜
⎞⎠⎟ Ixx Izz − Ixz
2( ) ! Lr
Yaw Rate DynamicsNonlinear equation
Third row of linearized dynamic equation
42
!r = IxzLB + IxxNB( ) Ixx Izz − Ixz
2( )
Δ!r(t) = F31Δv(t)+ F32Δp(t)+ F33Δr(t)+ F34Δφ(t)[ ]+ G31ΔδA(t)+G32ΔδR(t)[ ]+ L31Δvwind + L32Δpwind[ ]

11/12/18
22
F31 = Ixz
∂LB∂v
+ Ixx∂NB
∂v⎛⎝⎜
⎞⎠⎟ Ixx Izz − Ixz
2( ) ! Nv
Coefficients in third row of F
Yaw Rate Sensitivity to State Perturbations
43F34 = 0
!r = IxzLB + IxxNB( ) Ixx Izz − Ixz
2( )
F32 = Ixz
∂LB∂p
+ Ixx∂NB
∂p⎛⎝⎜
⎞⎠⎟
Ixx Izz − Ixz2( ) ! Np
F33 = Ixz
∂LB∂r
+ Ixx∂NB
∂r⎛⎝⎜
⎞⎠⎟ Ixx Izz − Ixz
2( ) ! Nr
Roll Angle DynamicsNonlinear equation
Fourth row of linearized dynamic equation
44
!φ = p + r cosφ( ) tanθN
Δ !φ(t) = F41Δv(t)+ F42Δp(t)+ F43Δr(t)+ F44Δφ(t)[ ]+ G41ΔδA(t)+G42ΔδR(t)[ ]+ L41Δvwind + L42Δpwind[ ]

11/12/18
23
F41 = 0Coefficients in fourth row of F
Roll Angle Sensitivity to State Perturbations
45
!φ = p + r cosφ( ) tanθN
F42 = 1
F43 = cosφN tanθN ≈ tanθN
F44 = rN sinφN tanθN = 0
Primary Lateral-Directional Control Derivatives
LδA = ClδA
ρNVN2
2Ixx
⎛⎝⎜
⎞⎠⎟Sb
NδR = CnδR
ρNVN2
2Izz
⎛⎝⎜
⎞⎠⎟Sb
46

11/12/18
24
Initial Condition Response of Approximate Dutch Roll Mode
Δr t( ) Δβ t( )
47
Dutch roll VideoCalspan Variable-Stability Learjet Dutch roll Oscillation
http://www.youtube.com/watch?v=1_TW9oz99NQ
48