l’introduzione della robotica e delle nanotecnologie …
TRANSCRIPT
Centro Militare di Studi Strategici
Rapporto di Ricerca 2014 – RELINT AH-R-04
L’INTRODUZIONE DELLA ROBOTICA E DELLE
NANOTECNOLOGIE A FAVORE DEL SOLDATO
Come i principali Paesi NATO/UE valutano ed impiegano soluzioni
tecnologiche avanzate
Ing. Jaime J. BESTARD
data di chiusura della ricerca: Novembre 2014
Military Centre for Strategic Studies
2014 Research Report – RELINT AH-R-04
ROBOTICS AND NANOTECHNOLOGY
IN SUPPORT OF THE SOLDIER
Evaluation and application of advanced technological solutions by
major NATO and EU Member States
Mr. Jaime J. BESTARD
Research closing date: November 2014

RICERCA AH-R-04 iii
Ma Talos, l’uomo di bronzo, scagliando pietre da una solida
roccia, impedì di gettare a terra le gomene, quando furono giunti
al porto Ditteo. Era questi il solo rimasto dei semidei della razza
di bronzo, ch’era nata dai frassini, e Zeus l’aveva dato ad
Europa come guardiano dell’isola, che percorreva tre volte coi
piedi di bronzo. Di bronzo infrangibile era tutto il suo corpo e le
membra, ma sulla caviglia, al di sotto del tendine, aveva una
vena di sangue, e la copriva una sottile membrana che era per
lui vita e morte.
Le Argonautiche
And Talos, the man of bronze, as he broke off rocks from the
hard cliff, stayed them from fastening hawsers to the shore, when
they came to the roadstead of Dicte’s haven. He was of the stock
of bronze, of the men sprung from ash-trees, the last left among
the sons of the gods; and the son of Cronos gave him to Europa
to be the warder of Crete and to stride round the island thrice a
day with his feet of bronze. Now in all the rest of his body and
limbs was he fashioned of bronze and invulnerable; but beneath
the sinew by his ankle was a blood-red vein; and this, with its
issues of life and death, was covered by a thin skin.
Argonautica
RICERCA AH-R-04 iv
TABLE OF CONTENTS
ROBOTICS AND NANOTECHNOLOGY IN SUPPORT OF THE
SOLDIER
Evaluation and application of advanced technological solutions by
major NATO and EU Member States
Abstract ................................................................................................................................ 1
Premessa ............................................................................................................................. 2
Foreword .............................................................................................................................. 3
Acknowledgements .............................................................................................................. 4
1 Introduction ...................................................................................................................... 5
A. The leading edge .................................................................................................... 5
B. Robotics defined ..................................................................................................... 6
C. A brief overview of nanotechnology ........................................................................ 9
2 NATO and EU leading strategies ................................................................................... 11
A. The need for military robotics ............................................................................... 13
B. Leading strategies and policies on military robotics and automation .................... 13
I. United States ........................................................................................................ 14
II. European Union ................................................................................................ 21
III. National strategies of leading EU Member States ............................................. 25
C. The rise of nanotechnology .................................................................................. 28
RICERCA AH-R-04 v
D. Leading strategies and policies on nanotechnology ............................................. 30
I. United States ........................................................................................................ 31
II. European Union ................................................................................................ 34
E. Benefits, limitations, and concerns ....................................................................... 36
3 A vision for the Italian defence enterprise ...................................................................... 40
A. A vision for robotics and automation ..................................................................... 41
B. Nanotechnology in support of ground forces ........................................................ 47
C. Strategies for integrating advanced technologies ................................................. 50
4 Conclusions ................................................................................................................... 55
Bibliography ....................................................................................................................... 57
List of acronyms .......................................................................................................... A-1 A
Analysis of robotic systems abilities ............................................................................ B-1 B

RICERCA AH-R-04 1
ABSTRACT
ROBOTICS AND NANOTECHNOLOGY IN SUPPORT OF THE
SOLDIER
Evaluation and application of advanced technological solutions by
major NATO and EU Member States
Innovation is the engine behind human evolution and the leading Member States in the
North Atlantic Treaty Organization (NATO) and the European Union (EU) are driven by
their investments in sectors that lead to next-generation technologies. Robotics and
nanotechnology are two sectors that are expected to revolutionize society in the next
decades and are the target of focused investments by global front-runners. Advancing
these technological solutions and easing their adoption and diffusion through the Defence
enterprise will support Italy as the nation progresses in the 21st Century. This research
study provides trends in robotics and nanotechnology innovation that will reshape the
range of military operations in the next 30 years and should be the objective of the Italian
public and private sectors as they adapt to prevail in ever changing strategic and
geopolitical landscapes. Given the endless opportunities offered by advances in these
fields, this study of leading NATO and EU strategies for technological innovation produces
a vision for Italy to research, develop, and procure the latest technology for its soldiers as
they perform their constitutional responsibilities in defence of national priorities.

RICERCA AH-R-04 2
PREMESSA
L’INTRODUZIONE DELLA ROBOTICA E DELLE
NANOTECNOLOGIE A FAVORE DEL SOLDATO
Come i principali Paesi NATO/UE valutano ed impiegano soluzioni
tecnologiche avanzate
L’innovazione tecnologica ha visto la diffusione anche in campo militare di materiali e
strumenti avanzati. Oggigiorno, l’adozione di soluzioni tecnologiche per la Difesa sembra
essere una scelta imprescindibile dall’evoluzione richiesta nei prossimi anni. Affianco alla
tecnologia nei suoi aspetti tradizionali, vi è l’affermazione di nuove forme di innovazione,
caratterizzate dall’uso della robotica e delle nanotecnologie. Queste spinte evolutive
determinano nuovi spunti per l’introduzione di strumenti avanzati come risorse spendibili in
maniera rapida ed efficace da parte dei soldati per differenti operazioni. La ricerca in
argomento vuole allora esplorare le possibilità offerte dall’applicazione della robotica e
delle nanotecnologie in campo militare, cominciando dalle strategie di policy che
sottendono all’adozione di nuove forme di innovazione anche nelle forze armate dei
principali Paesi, per poi approfondire un percorso che individui dapprima su quali aspetti
concentrare il focus dell’applicazione di tecnologie avanzate alla Difesa, e
successivamente su quali strategie implementare per permettere una profonda
integrazione tra l’addestramento e l’utilizzo delle stesse nelle attività militari.

RICERCA AH-R-04 3
FOREWORD
ROBOTICS AND NANOTECHNOLOGY IN SUPPORT OF THE
SOLDIER
Evaluation and application of advanced technological solutions by
major NATO and EU Member States
The proliferation of advanced materiel and equipment in the military arena has been driven
by technological innovation. Adopting technological solutions for Defence applications
nowadays is an essential choice for the required evolution of the coming years. The
emergence of new forms of innovation, highlighted by the use of robotics and
nanotechnologies, complements technology in a traditional sense. These evolutionary
concepts lead to new applications for advanced equipment that support soldiers in varied
operational situations by providing expendable resources that are rapidly and efficiently
deployed. This study explores the possibilities offered by the application of robotics and
nanotechnologies in the military arena, starting from policies and strategies that underlie
the adoption of new forms of innovation in the armed forces of major North Atlantic Treaty
Organization (NATO) and European Union (EU) member states. Subsequently, the study
seeks to identify key areas for the Defence application of advanced technologies, followed
by recommendations on strategies to be implemented that allow a deep of these
technologies into military training and operational activities.

RICERCA AH-R-04 4
ACKNOWLEDGEMENTS
ROBOTICS AND NANOTECHNOLOGY IN SUPPORT OF THE
SOLDIER
Evaluation and application of advanced technological solutions by
major NATO and EU Member States
This report was made possible thanks to the support and advice of many individuals and
organizations. The author is very grateful for the support of the high-calibre officers within
the Research Strategy, Plans and Programs office of the Technological Innovation
Department of the Italian General Secretariat of Defence and National Armaments
Directorate (SGD/DNA), in particular Captain Francesco SCIALLA (Italian Navy), Captain
Giulio Marino Cappelletti (Italian Navy) and Lieutenant Colonel Giovanni SEMBENINI
(Italian Army). The author is also extremely thankful to the first-rate team in the Office of
Defense Cooperation of the United States (US) Embassy in Rome for their exceptional
advice and encouragement, with special thanks to Colonel Tucker MANSAGER (US
Army), Lieutenant Colonel Kevin JUDD (US Air Force), Commander Michael NYILIS (US
Navy), and Lieutenant Colonel John DIBERT (US Air Force). The author would also like to
acknowledge the key role of US Air Force as the sponsor and principal driver of the
Engineer and Scientist Exchange Program (ESEP) with the Italian MoD. Many of the
contents of this report would not have been possible without the support of Italian
enterprises, universities, and research centres conducting military robotics and
nanotechnology R&D. Finally, the author would like to thank the Italian Military Centre for
Strategic Studies (CeMiSS) for promoting this research study.

RICERCA AH-R-04 5
1 INTRODUCTION
“Boldness can lend wings to intellect and insight; the stronger
the wings then, the greater the heights, the wider the view, and
the better the results; though a greater prize, of course, involves
greater risks.”
Carl von Clausewitz1
A. The leading edge
Nations capable of taking bold risks developing and applying state-of-the-art technologies
to advance their national priorities and sustain their international commitments have been
global and regional leaders throughout history. Therefore, the leading North Atlantic Treaty
Organization (NATO) and European Union (EU) Member States are capable of developing
and implementing strategies and policies that foster innovation, placing them at the
technological forefront. These nations are capable of taking risks and investing heavily on
emerging technologies with the potential to disrupt the multiple instruments of national
power (i.e., diplomatic, informational, military, and economic)2 in the long term.
Robotics, automation, and nanotechnology are examples of the emerging technologies
that have seen significant investment in the past 20 years to improve and revolutionize the
NATO and EU defence and security landscape. The impact of these technologies is seen
in the evolution of warfare across all domains, but particularly in the operations carried out
by the soldier on the ground.
1 Cf. (von Clausewitz, 1993, p. 225)
2 Cf. (Department of Defense, 2013a, pp. I-11 - I-13)

RICERCA AH-R-04 6
The modern soldier receives persistent intelligence from unmanned aerial systems, is
supported by unmanned ground systems in the detection and neutralisation of improvised
explosive devices (IED) and mines, and is protected by autonomous systems in forward
operating bases (FOB). Furthermore, uniforms and personnel protection devices continue
to advance with nanotechnologies that provide lightweight materials and improved
protection against blast and ballistic threats, as well as embedded systems for the
detection of hazardous substances, the enhancement of situational awareness, and the
interaction of the soldier with unmanned partners and his/her environment.
Figure 1. The soldier today
Today’s realities in the field are the products of more than 20 years of bold investments by
leading NATO and EU governments and their military applications are the result of
visionary strategies and policies. Moreover, as these technologies mature and the risk of
investing on their basic and applied research diminishes, the private sector begins to see
business potential in the application of robotics and nanotechnologies and new thriving
markets emerge, keeping NATO and EU economies at the leading edge of innovation and
increasing the overall wellbeing of private citizens.
B. Robotics defined
Robotics is “the branch of technology that deals with the design, construction, operation,
and application of robots”, as well as the systems that enable their control, sensory
feedback, and information processing, while a robot is “a machine capable of carrying out
a complex series of actions automatically”3.
3 Cf. (Oxford University Press, 2014b)
RICERCA AH-R-04 7
Human evolution and the continued expansion of the human brain are constantly
stimulated by the use of complex tools. As a result, humankind has been involved in the
development of machines and tools that mimic human behaviour and that take the place of
humans in dangerous or repetitive tasks since classical antiquity. However, during the 20th
century the fields of robotics and automation have seen rapid growth thanks to major
science and technology (S&T) advances that have improved the functionality and
application of autonomous machines, concepts, and technologies. Today, as robotics and
automation technologies continue to advance and proliferate through research and
development (R&D), robots are sought more than ever for routine domestic, commercial,
and military activities.
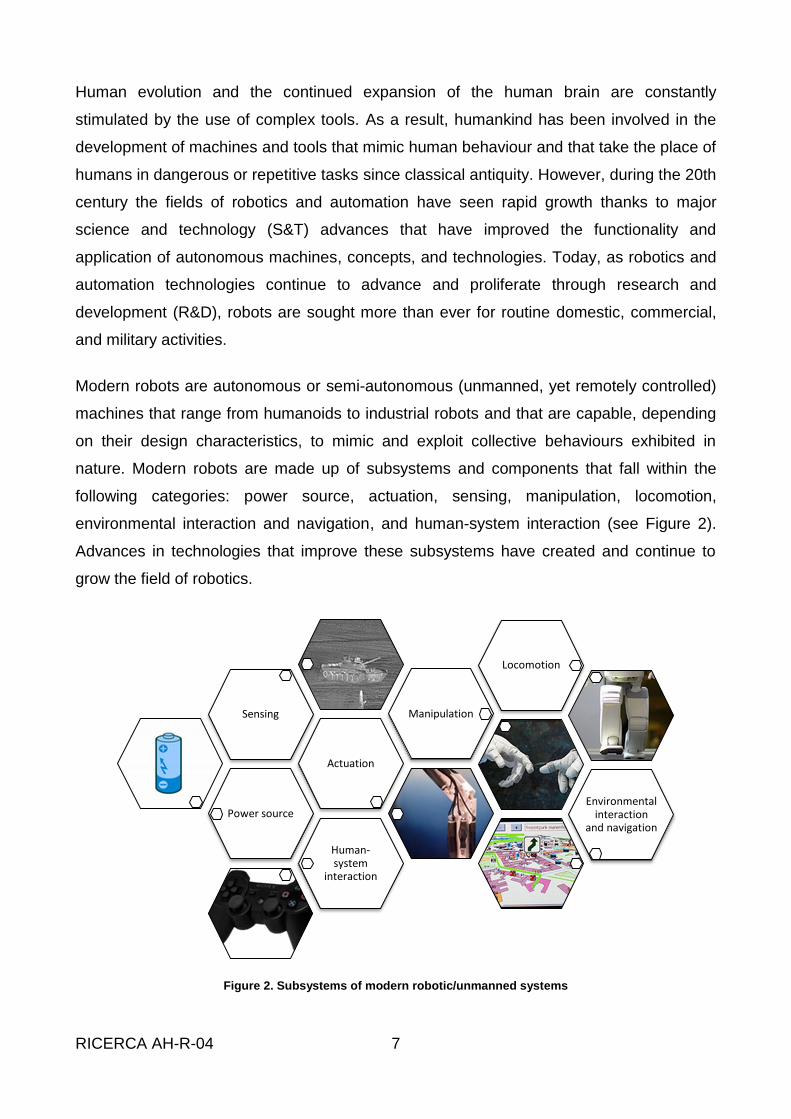
Modern robots are autonomous or semi-autonomous (unmanned, yet remotely controlled)
machines that range from humanoids to industrial robots and that are capable, depending
on their design characteristics, to mimic and exploit collective behaviours exhibited in
nature. Modern robots are made up of subsystems and components that fall within the
following categories: power source, actuation, sensing, manipulation, locomotion,
environmental interaction and navigation, and human-system interaction (see Figure 2).
Advances in technologies that improve these subsystems have created and continue to
grow the field of robotics.
Figure 2. Subsystems of modern robotic/unmanned systems
Power source
Actuation
Sensing Manipulation
Locomotion
Environmental interaction
and navigation
Human-system
interaction

RICERCA AH-R-04 8
Robots exhibit varying degrees of autonomy and most military robotic systems tend to be
remotely controlled (unmanned). Though there is no clear division between autonomous
and unmanned systems, in this report autonomous systems are those capable, at a
minimum, of sensing their environment and navigating on their own4, which in some cases
carries operational restrictions (legal and otherwise). Robotic unmanned systems are
further divided based on their operational domain (see Figure 3):
- Unmanned ground vehicles (UGV): for ground operation;
- Unmanned aerial vehicles (UAV): for air operation;
- Unmanned surface vehicle (USV): for operation on the surface of the water;
- Unmanned underwater vehicle (UUV): for operation underwater;
- Unmanned spacecraft: for operation in space.
Figure 3. Types of robotic systems
Robotic systems can augment the effectiveness of ground forces by supporting functions
common to joint operations at all levels of war, including command and control,
intelligence, fires, movement and manoeuvre, protection, and sustainment. However,
these advanced capability improvements must be implemented with great attention to
ethical and legal concerns. Having said that, today, advances in the autonomy,
4 http://en.wikipedia.org/wiki/Unmanned_vehicle
Unmanned ground
vehicle (UGV)
Unmanned aerial vehicle
(UAV)
Unmanned surface
vehicle (USV)
Unmanned underwater
vehicle (UUV)
Unmanned spacecraft

RICERCA AH-R-04 9
interoperability, and survivability of robotic/unmanned systems are the mark of cutting-
edge military R&D in major NATO and EU member states and the implementation of novel
capabilities will continue ensuring the superiority of these nations in terms of defence and
security.
C. A brief overview of nanotechnology
Nanotechnology is “the branch of technology that deals with dimensions and tolerances of
less than 100 nanometres, especially the manipulation of individual atoms and
molecules”5.
Technological advances during the last 50 years have established nanotechnology as an
important field ready for discoveries and further understanding. The “science of the very
small” has established solid R&D footing in NATO and EU member states with the US at
the helm through its National Nanotechnology Initiative (NNI) followed by sustained
programs in the European Community6. In fact, the US NNI is second only to the space
program in terms of civilian S&T investment7.
Nanotechnology is very likely to be the next general purpose technology, having pervasive
effect on many different sectors and becoming the foundation of new economic growth8.
The development of nanotechnology in the past 20 years has been driven by the lead
vision of the US government, which sought to identify the next major technological
development that would have disruptive applications in 10 to 20 years. The US
government, in consultation with academics and corporate experts, identified
nanotechnology as a sector to back forcefully, providing policy and investing heavily
(approximately $1.8 billion, ca. €1.4 billion or £1.1 billion, annually) during the last 20 years
through a whole-of-government approach involving a total of 13 government agencies9.
5 Cf. (Oxford University Press, 2014a)
6 Cf. (Roco, et al., 2010, p. iv)
7 Ibid.
8 Cf. (Mazzucato, 2014, p. 83)
9 Ibid., p. 85
RICERCA AH-R-04 10
Today nanotechnology finds itself at a crossroads, with a proven impact on fields such as
advanced materials, biomedicine, electronics, and novel energy resources while
integrating with emerging technologies such as quantum information systems, biological
sensors and advanced communications. However, nanotechnologies do not yet have a
major economic impact because of a perceived lack of commercialization. In addition,
nanotechnologies are perceived as being young and risky and solid transition strategies
corresponding to economies of scale are yet to be developed, with the private sector
relying strongly on government R&D investments.
Furthermore, there are possible physical, ethical, legal, and social concerns, military and
civilian, that arise with the development of nanotechnologies and that are considered in
some of the strategies and initiatives of major NATO and EU member states. Examples of
these risks include nano-robots and nanotechnologies used to eavesdrop on confidential
conversations, or waste generated in the manufacturing of nano-materials that can
penetrate animal or plant cells with unintended, yet unknown, consequences.
Notwithstanding, today the potential benefits of nanotechnology R&D outweigh the risks
and as long as technological innovation takes into consideration possible pitfalls, the
implementation of these technologies will improve the capabilities and performance of
future NATO and EU soldiers as they guarantee our common defence and security.

RICERCA AH-R-04 11
2 NATO AND EU LEADING STRATEGIES
“The role of grand strategy – higher strategy – is to co-ordinate
and direct all the resources of a nation, or band of nations,
towards the attainment of the political object of the war – the
goal defined by fundamental policy.”
Sir Basil Henry Liddell Hart10
The national research agendas of leading NATO and EU countries take into account
robotics and nanotechnology from a whole-of-government approach, considering civilian
and defence uses for these technologies11. Similarly, leading defence strategic research
agendas are concerned with joint warfare capabilities, keeping in mind that all branches of
the military operate across multiple domains12 and therefore optimizing the employment of
resources and avoiding the duplication of efforts13. At the operational level, the military
branches focus on strategies and requirements specific to their mission, but focused on
their principal operational domain14. Finally, at the tactical level, procurement organizations
(including those involved in research, development, test and evaluation (RDT&E)
activities) provide technological strategies that address the current requirements of
10 Cf. (Liddell Hart, 1967, p. 322)
11 See, e.g., (Subcommittee on Nanoscale Science, Engineering, and Technology, 2014)
12 E.g., the US Marine Corps, the British Royal Marines, and the Italian San Marco Regiment are all
examples naval infantry units with aviation support
13 See, e.g., (Department of Defense, 2013b)
14 See, e.g., (Office of Naval Research, 2011)

RICERCA AH-R-04 12
operational forces and provide a vision and roadmap for technologies and capabilities that
will shape forces in the next 10 – 20 years15.
Strategies and visions established by leading NATO and EU defence and security
enterprises are backed in some cases by political and legislative agendas that drive
innovation and provide the resources and legal framework necessary for success16. The
generic construct observed in the strategic planning and policy-making of leading NATO
and EU nations to nurture technological innovation is shown in Figure 4.
Figure 4. Generic construct for the strategic planning of technological innovation in leading NATO/EU nations
15 See, e.g., (US Army Research Laboratory, 2014)
16 See, e.g., (Floyd D. Spence National Defense Authorization Act for Fiscal Year 2001)

RICERCA AH-R-04 13
A. The need for military robotics
Today the world continues to be challenged by limited resources (human, financial, and
otherwise) that in many cases are the real casus belli of conflicts, but that also constrain
the military capabilities of belligerents. Military robots have thus become a force multiplier
by increasing the efficiency of modern forces performing repetitive tasks while enhancing
operational effectiveness and removing soldiers from harm’s way17. Robots and unmanned
systems have already proven themselves providing persistent and capable intelligence,
surveillance, and reconnaissance (ISR) capabilities during recent conflicts and
humanitarian crises. Unmanned aerial vehicles have also contributed in combat by
pinpointing targets or through armed attacks directly terminating targets.
As the capabilities of military robotics improve, commanders can expect systems to
improve operations through modularity, interoperability, integration with manned systems.
As these systems become more ingrained in military operations, commanders will expect
their effectiveness to improve through greater automation, improved performance, and
flexibility. More importantly, as the costs, complexity, and high-demand of these assets
increase, defence enterprises worldwide will expect them to be more survivable in
contested environments through communications resiliency, security against tampering,
and robust system designs.
B. Leading strategies and policies on military robotics and automation
Major NATO and EU nations have embarked in full-blown materiel procurement
programmes based on the visionary strategies devised by their defence and security
leaders in order to address the issues identified earlier in a focused and efficient manner
while fostering innovation. These programmes have aimed at achieving varying degrees of
automation through the use of unmanned and robotic systems. As these systems
proliferate, they will integrate more with ground forces and this synergy will make them
essential to successful operations, requiring survivable, resilient, secure, interoperable,
and increasingly autonomous capabilities.
17 Cf. (Effinger, 2010, p. 46)

RICERCA AH-R-04 14
I. United States
“It shall be a goal of the Armed Forces to achieve the fielding of
unmanned, remotely controlled technology such that by 2010,
one-third of the aircraft in the operational deep strike force
aircraft fleet are unmanned; and by 2015, one-third of the
operational ground combat vehicles are unmanned.”
(Floyd D. Spence National Defense Authorization Act
for Fiscal Year 2001)
The United States has been a global leader establishing a vision for the development and
application of robotics in the defence sector with contributions at all levels of its defence
enterprise and national security apparatus.
At the turn of the 21st century the US Congress recognised the potential of robotics and
automation and set a lofty goal for the Armed Forces such that by 2015 one-third of the
operational ground-combat vehicles of the Armed Forces are to be unmanned18. The
subsequent Global War on Terrorism exposed US ground forces to irregular threats, such
as IED, and unmanned systems helped mitigate risks by removing troops from harm’s way
and allowing for the remote detection and neutralization of these threats. Based on these
events US Congress directed the Secretary of Defense to “develop a policy, applicable
throughout the Department of Defense (DoD), on research, development, test and
evaluation, procurement, and operation of unmanned systems” 19 . Since then, senior
leadership in the US DoD focused on the development of strategies to procure and employ
unmanned systems.
The first aim of strategies developed by the US DoD was the prioritization of capability
needs that could be addressed with unmanned/robotic systems across all domains 20.
18 Cf. (Floyd D. Spence National Defense Authorization Act for Fiscal Year 2001)
19 Cf. (John Warner National Defense Authorization Act for Fiscal Year 2007)
20 Cf. (Department of Defense, 2009, p. 7)

RICERCA AH-R-04 15
These priorities included reconnaissance and surveillance; target identification and
designation; counter-mine explosive ordnance disposal; and chemical, biological,
radiological, nuclear (CBRN) reconnaissance. All priorities are closely aligned with the
requirements of ground troops. Secondly, the US DoD identified existing systems and
ongoing procurement programmes that address Joint Capability Areas, creating a
comprehensive mapping of systems and building a roadmap of robotic “programmes of
record” for each operational domain.
Once an assessment of the operational and procurement scenarios was established, the
DoD roadmap proceeded to plan for the future of unmanned systems across all domains,
considering near-term developments (2009 – 2015) as “evolutionary adaptations”, while
performance attributes in the long term (2015 – 2034) are considered “revolutionary
adaptations”. In the ground domain, the key performance attributes important to advance
robotic systems revolved around improvements in locomotion (manoeuvrability and
speed), survivability, and interaction with the environment (navigation, manipulation, and
human-system interaction).
The vision of the DoD is to evolve the manoeuvrability of ground robotic systems to
achieve real-time planning, including collaboration with human and robotic partners, and
through fully autonomous on-board sense and avoid capabilities while achieving top
speeds of roughly 90 mph (ca. 140 km/h). More importantly, robotic systems today are
tele-operated and operations are limited to favourable environments; however, by 2034
robotics systems are expected to operate in hostile environments autonomously, exhibiting
significant survivability features and making decisions that today are made, or at best
approved, by humans21. Furthermore, ground robots will be the predominant vehicles
participating in urban combat operations, requiring a higher degree of autonomy in
navigation22, advanced locomotion23 and manipulation24, and improved decision-making
21 Cf. (Department of Defense, 2009, p. 31)
22 E.g., robots may have to operate in GPS-denied areas
23 E.g., to climb stairs
24 E.g., to open drawers, doors, windows, etc.
RICERCA AH-R-04 16
capacity as well as survivability and the ability to operate in diverse environments that may
diminish the performance of multiple subsystems.
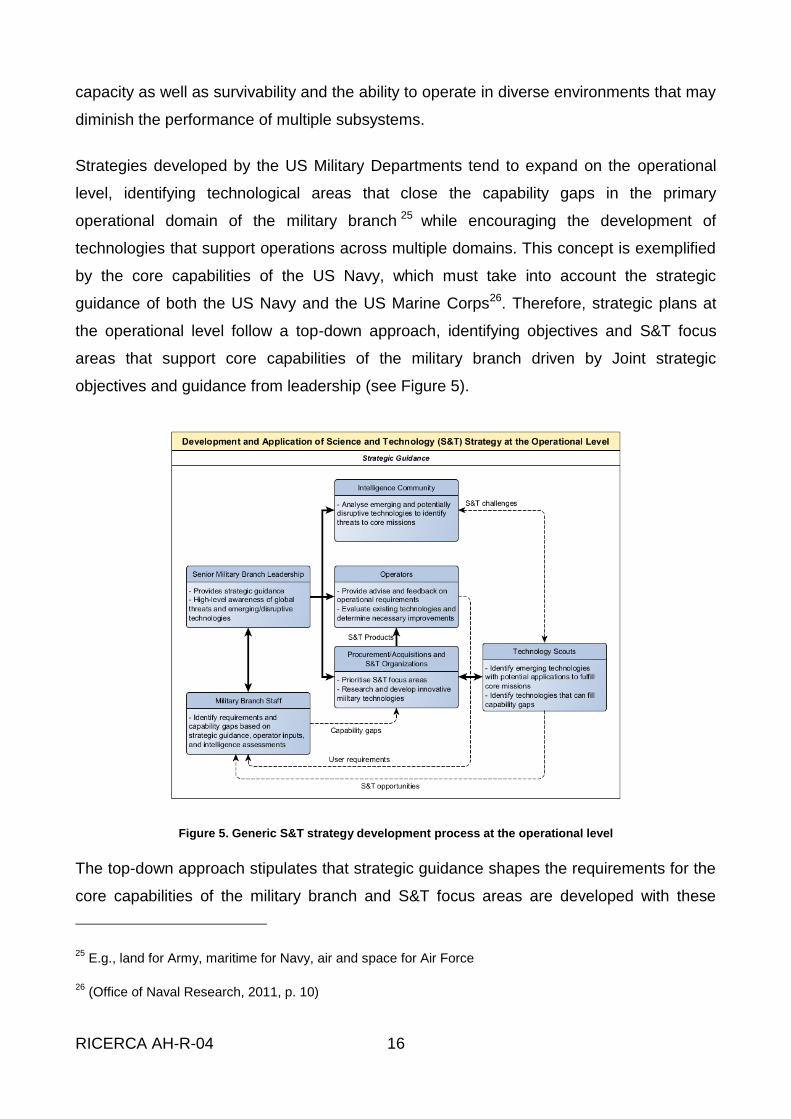
Strategies developed by the US Military Departments tend to expand on the operational
level, identifying technological areas that close the capability gaps in the primary
operational domain of the military branch 25 while encouraging the development of
technologies that support operations across multiple domains. This concept is exemplified
by the core capabilities of the US Navy, which must take into account the strategic
guidance of both the US Navy and the US Marine Corps26. Therefore, strategic plans at
the operational level follow a top-down approach, identifying objectives and S&T focus
areas that support core capabilities of the military branch driven by Joint strategic
objectives and guidance from leadership (see Figure 5).
Figure 5. Generic S&T strategy development process at the operational level
The top-down approach stipulates that strategic guidance shapes the requirements for the
core capabilities of the military branch and S&T focus areas are developed with these
25 E.g., land for Army, maritime for Navy, air and space for Air Force
26 (Office of Naval Research, 2011, p. 10)

RICERCA AH-R-04 17
requirements in mind and taking into account inputs and recommendations from a diverse
number of stakeholders that includes operators, S&T advisors, and the intelligence
community. An example of S&T focus areas identified through this approach is shown in
Figure 6.
Figure 6. US Navy S&T focus areas
As robotic systems evolve and proliferate, so do Doctrine/Policy, Organization, Training,
Material, Leadership, Personnel, and Facilities (DOTMLPF). These topics evolve as new
technologies are used in operations and the results of DOTMLPF assessments provide
feedback to the user requirements definition and prioritization processes. In 2009, the US
Army Training and Doctrine Command (TRADOC) published a strategy white paper27 to
identify mission-related tasks and assess the feasibility of robotic systems to conduct or
assist the soldier in operations. The TRADOC strategy white paper serves as a reference
point as TRADOC has been tasked once more, this time by General Raymond T. Odierno,
the Chief of Staff of the US Army, “…discuss the costs associated with expediting fielding
of unmanned vehicle technologies earlier than 2025”.
Operations in Iraq and Afghanistan demonstrated the ability of robotic systems to
complement and assist soldiers through a wide range of missions. Given the goals
established by the US Congress and DoD guidance, the US Army’s “investment strategy”
in R&D has addressed four key DoD priority mission areas: reconnaissance and
27 Cf. (Department of the Army, Headquarters United States Army Training and Doctrine Command, Army
Capabilities Integration Center, 2009)
Assure access to the maritime battle space
Autonomy and unmanned
systems
Expeditionary and irregular
warfare
Information dominance
Platform design and survivability
Power and energy
Power projection and integrated
defence
Total ownership cost
War-fighter performance

RICERCA AH-R-04 18
surveillance; target identification and designation; counter-mine warfare; and CBRN and
explosive reconnaissance. Furthermore, for doctrine and training purposes, US Army
experts divided tasks into five mission-functional areas that can be performed by robotic
systems and conducted a feasibility assessment of each broad task description. The
results of the feasibility assessment are summarized in Table 1 showing detailed
descriptions of tasks that have low and medium schedule (0 – 5 years), cost (up to $10
million), and complexity risks.
Table 1. US Army tasks that can potentially be supported by robotic systems at low-medium risks28
Mission-functional area
Description
Logistics - Aerial cargo transport and delivery of equipment; - Cargo packaging and pallet assembly; - Packaged warehousing: Inventory management, prioritization, retrieval and preparation for
movement; - Indoor yard lift and short movement operations; - New design for waterborne discharge of equipment ship to shore.
Security - Armed/unarmed static/mobile perimeter security of military installations/airfields, ammunition storage areas, and chemical weapons storage areas within continental US and FOB;
- Fixed, remote scan of personnel and vehicles entering restricted areas at Entry Control Point; - Remote mobile scan of personnel and vehicles entering restricted areas; - Detect, identify, assess, report, and provide warning in event of a hazardous spill; - Remove and clean up hazardous materials from contaminated areas; - Casualty evacuation.
Engineering - Conduct remote/tele-operated terrain recon for roadworthiness and location of barriers/obstacles/mines;
- Overcome and report obstacles through remote control and tele-operation; - Conduct breach operations, suppress, obscure, and secure breach lanes through remote
control and tele-operation; - Move and emplace materiel, construct obstacles, and establish security through remote control
and tele-operation; - Mark, record and report obstacles; - Conduct firefighting operations through remote control and tele-operation; - Earthmoving for airfields and FOB autonomously or through remote control and tele-operation; - Detect and remove explosives on surface and sub-surface of land or water through remote
control and tele-operation.
Medical - Conduct pharmacy operations; - Perform tele-medicine to assess vital signs; - Recover battlefield casualties; - Dispose medical waste.
Maintenance - Maintain and repair facilities; - Perform diagnostic checks or Preventive Maintenance Checks and Services on vehicles and
equipment; - Advanced manufacturing: turning and welding.
The study carried out by the US Army went beyond a risk analysis exercise and took into
consideration DOTMLPF issues. These issues range from personnel changes depending
on the robotic solution in support of Soldiers to redirecting workloads from humans to
28 Cf. (Department of the Army, Headquarters United States Army Training and Doctrine Command, Army
Capabilities Integration Center, 2009, pp. 9-19)
RICERCA AH-R-04 19
machines. These issues must be addressed on a case-by-case basis through a full cost-
benefit and DOTMLPF assessment of fielding new robotic systems.
Specific concerns on fielding robotic systems include the degree of autonomy, the
reliability of the system, and the nature of the operational environment. Careful
assessments will result in a controlled evolution toward increased autonomy were robotic
systems will operate independent of humans. Evolutions in autonomy will lead to
increased interoperability, beginning with seamless human-robot interactions and aiming
to cooperation among systems from different Armed Forces or civilian organizations as
well as allies and coalition partners. At the US Army level, the analysis also raised a
number of policy issues that would have to be addressed as robotic systems proliferate,
for example, aside from the obvious concerns for armed robots performing combat or
installation security tasks, current US Army policy prohibits unattended casualty
evacuation. This last policy restriction would have to be modified or amended to allow
robotic systems to accompany evacuated casualties in lieu of trained medical personnel29.
As technology continues to evolve, so will the concept of operations (CONOPS). In fact,
manned operations will evolve to missions where humans and their robotic partners
interact seamlessly, eventually paving the way to completely unmanned CONOPS. This
evolution may result in similar costs for manned and unmanned systems designed to
operate in contested environments, but autonomy may yield significant savings in training
and total lifecycle costs. In addition, unmanned systems pose different survivability issues
than their manned counterparts. Adopting autonomy may shift the ever increasing need for
dedicated (costly) manned platforms to penetrate battle networks to large numbers of low-
cost expendable unmanned systems that allow US forces to overwhelm enemy defences
at favourable cost-exchange ratios. Furthermore, swarms of systems operating together
increase the resiliency of the system-of-systems and survivability becomes a characteristic
of the swarm rather than the individual system and allows for a smooth degradation of
capability rather than complete loss or mission failure as individual platforms enter
contested environments and are disabled or destroyed30.
29 Cf. (Department of the Army, Headquarters United States Army Training and Doctrine Command, Army
Capabilities Integration Center, 2009, pp. 19-21)
30 Cf. (Work & Brimley, 2014, pp. 28-29)

RICERCA AH-R-04 20
The impact of robots on the US Army organization and programmatic concerns will persist
throughout the lifecycle of these systems. As robotics systems proliferate, not only will they
require specialized operators, but trained maintainers and dedicated facilities will be
required. Currently, the US Army operates a Joint Robotics Repair Facility (JRRF) that
performs specialized maintenance for robots in forward operational theatres. However, this
facility operates on supplemental wartime funding with no operational budget or
manpower. The temporary nature of funding means that the JRRF can disappear when
operations end. Therefore, organizational and programmatic concerns must include the
issue of specialized forward maintenance as part of an evolving way of war. These
changes also pose an evolution in training requirements, which go from the individual
specialized training to unit leaders to collective training and possibly staff training in order
to effectively operate and support robotic systems31.
Taking into consideration the current state-of-the-art in robotics, the successes and
concerns identified during recent operations, and the issues that must be addressed
throughout the US Defence enterprise, its senior leadership has embraced unmanned
systems with the expectation that their use will reduce overall support costs and
manpower32. According to The Honorable Robert O. Work, Deputy Secretary of Defense,
the US ability to project power and to dominate encounters has eroded significantly. This
shift can be offset by changing the current war-fighting regime to a future dominated by
“proliferated sensors, electric weapons, and ubiquitous unmanned and autonomous
systems in all operating domains”. In fact, “the United States will be driven to these
systems out of operational necessity and also because the costs of personnel and the
development of traditional crewed combat platforms are increasing at an unsustainable
pace”. Such transition will be challenged by declining budgets, increasing costs, and a
recent desire to avoid military intervention. However, such challenges must be overcome if
the US hopes to maintain technological superiority in the “Age of Robotics”33.
31 Cf. (Department of the Army, Headquarters United States Army Training and Doctrine Command, Army
Capabilities Integration Center, 2009, pp. 21-22)
32 Cf. (O'Donnell, 2014)
33 Cf. (Work & Brimley, 2014)

RICERCA AH-R-04 21
II. European Union
The EU has invested heavily in robotics and automation R&D through numerous
instruments sponsored by the European Commission (EC), in particular, the Framework
Programmes for Research and Technological Development. The Framework Programmes
exhibit a whole-of-government approach to research and innovation with particular focus
on civilian applications. The latest Framework Programme, Horizon 2020, identifies
robotics as a “fast developing market increasingly exploited in the development of novel
and improved services and products in areas as diverse as manufacturing, search and
rescue, health, homes, transport and logistics, environment and agriculture” 34 . The
solutions from robotics research through the Framework Programmes tend to transition to
the civilian sector, becoming commercial off-the-shelf (COTS) items with potential military
applications.
European defence initiatives stem from the mission and role of the European Defence
Agency (EDA), which through its European Defence Research and Technology (EDRT)
strategy provides a list of R&D priorities common across the EU35. These priorities include:
- Networked sensor control, management and cueing;
- Command and control technologies (e.g., campaign/operations/mission planning and
management, battlespace management, shared situational understanding, data
fusion/mining/reduction, image exploitation, and innovative sensors for urban warfare);
- Network management in Network-Enabled Capability (NEC) operations (e.g., fault,
configuration, administration, performance, and security management);
- Human integration and interoperability;
- Soldier systems (including integration into systems of systems and NEC);
- Counter-mine (land), gap-crossing, and counter-mobility systems;
- Power source and supply technologies;
- Ground platform technologies (structure, mobility) and mounted platform systems;
- Uninhabited land systems;
34 http://ec.europa.eu/programmes/horizon2020/en/h2020-section/robotics
35 https://eda.europa.eu/Aboutus/Whatwedo/strategies/ResearchandTechnology

RICERCA AH-R-04 22
- Aerial platform technologies (airframes, propulsion, aerodynamics, structures, and
control, including helicopters, UAV and high-altitude platforms); and
- Uninhabited naval systems, especially underwater systems.
These priorities can be achieved through robotics and automation R&D or are
technologies necessary for developing robotic systems that support defence missions.
However, EDA’s annual budget of ca. €30 million (ca. $37 million, £23 million) limits its
participation in the execution of these priorities to the role of common strategy and policy
developer as well as intermediator between Member States as they establish partnerships
to address specific topics of importance to their constituencies. The execution of R&D
activities for defence-specific technologies is left to Member States, albeit with support
from EDA as required.
More importantly, but always within the civilian context, the EC has provided roughly €700
million (ca. $875 million or £547 million) to fund the largest robotics innovation programme
in the world from 2014 – 2020: the SPARC partnership for robotics in Europe. This
initiative has produced solid plans for the development of robotics technology within the
next decade with a joint industrial and academic vision described in a Strategic Research
Agenda (SRA) 36 and a Multi-Annual Roadmap (MAR) 37 . The objectives of these
documents are to focus European investments on areas where “impact will be greatest”,
namely mechatronics, human robot interaction, systems development and cognition38. In
fact, the SPARC partnership “aims to facilitate the building and empowerment of an
industry and a supply chain that is capable of capturing over 42% of the world market in
robotics by 2020”39.
The SRA published by SPARC addresses concerns both on the civilian and military
application of robotics, such as building the European robotics industrial base through
proper market analyses while addressing ethical, legal, and societal (ELS) concerns.
Market domains identified by the SRA were clustered into five high-level categories:
36 Cf. (SPARC The Partnership for Robotics in Europe, 2013)
37 Cf. (euRobotics AISBL, 2014)
38 Cf. (SPARC The Partnership for Robotics in Europe, 2013, p. 4)
39 Ibid., p. 11

RICERCA AH-R-04 23
consumer, civil, commercial, logistics and transport, and military robots. Even though the
application of robotics for defence purposes is considered, the SRA focuses on civilian
applications specifying the markets that are most likely to create significant growth and
provide strong opportunities as manufacturing, healthcare, and agriculture. Furthermore,
when discussing operational domains, the SRA lists four traditional domains considered in
modern military doctrine (i.e., land, air, sea, and space), but adds “the human body” as
another domain. The human body should also be considered in military strategies, since
the combination of robotics and nanotechnology can make great strides in military and
dual uses for operations as well as for healthcare applications.
The SPARC partnership SRA identified various high-level technology clusters with
common impacts on robotics and presented an overview and key objectives for technology
development. The SRA provided a vision for 2020 for each technology, seeking in general
to improve effectiveness through greater functionality and ease of deployment, better
human-robot interactions, and increased autonomy40.
Figure 7. Technology clusters for robotics innovation identified in the SPARC partnership SRA
40 Cf. (SPARC The Partnership for Robotics in Europe, 2013, pp. 68-88)
Systems Development
•System Design
•Systems Engineering
•System Architecture
•Systems Integration
•Modelling and Knowledge Engineering
•System of Systems
Mechatronics
•Mechanical Systems
•Sensors
•Actuators
•Power Management and Supply
•Communications
•Materials
•Control
Human Robot Interaction
•Human-Machine Interface
•Human-Robot Collaboration
•Safety
Perception
•Sensing
•Interpretation
Navigation
•Mapping
•Localisation
•Motion Planning
Cognition
•Cognitive Architectures
•Learning, Development, and Adaptation
•Knowledge Representation and Reasoning
•Action Planning
•Natural Interaction
RICERCA AH-R-04 24
The SPARC partnership SRA is complemented by a roadmap (MAR) providing in-depth
details on the current state-of-the-art of technologies and the performance levels expected
in 2020. The MAR also assessed various “system abilities” that provide a basis for
establishing performance metrics and technical targets. The identified system abilities
included configurability, adaptability, interaction (human-robot, robot-robot, and human-
robot interaction safety), dependability, motion, manipulability, perception, decisional
autonomy, and cognitive (action, interpretive, envisioning, acquired knowledge, reasoning,
object interaction, human interaction) ability. All system abilities were described at different
levels which allow goals to be established (see Table B-1)41.
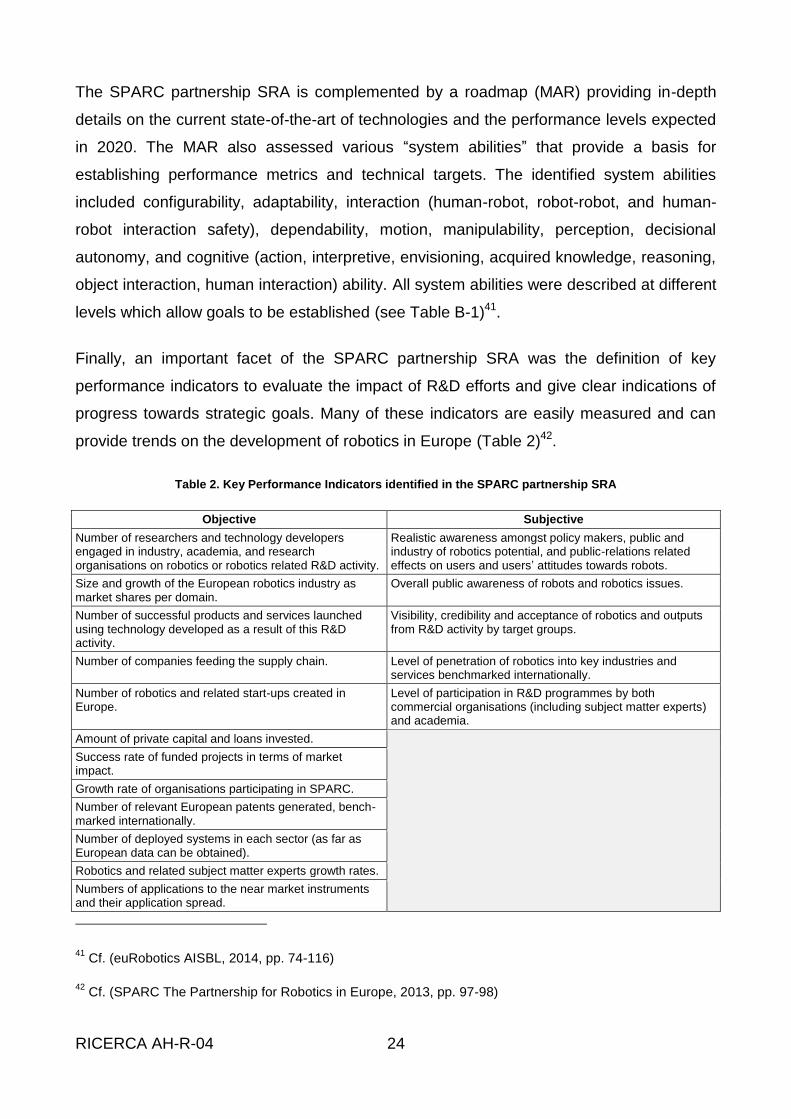
Finally, an important facet of the SPARC partnership SRA was the definition of key
performance indicators to evaluate the impact of R&D efforts and give clear indications of
progress towards strategic goals. Many of these indicators are easily measured and can
provide trends on the development of robotics in Europe (Table 2)42.
Table 2. Key Performance Indicators identified in the SPARC partnership SRA
Objective Subjective
Number of researchers and technology developers engaged in industry, academia, and research organisations on robotics or robotics related R&D activity.
Realistic awareness amongst policy makers, public and industry of robotics potential, and public-relations related effects on users and users’ attitudes towards robots.
Size and growth of the European robotics industry as market shares per domain.
Overall public awareness of robots and robotics issues.
Number of successful products and services launched using technology developed as a result of this R&D activity.
Visibility, credibility and acceptance of robotics and outputs from R&D activity by target groups.
Number of companies feeding the supply chain. Level of penetration of robotics into key industries and services benchmarked internationally.
Number of robotics and related start-ups created in Europe.
Level of participation in R&D programmes by both commercial organisations (including subject matter experts) and academia.
Amount of private capital and loans invested.
Success rate of funded projects in terms of market impact.
Growth rate of organisations participating in SPARC.
Number of relevant European patents generated, bench-marked internationally.
Number of deployed systems in each sector (as far as European data can be obtained).
Robotics and related subject matter experts growth rates.
Numbers of applications to the near market instruments and their application spread.
41 Cf. (euRobotics AISBL, 2014, pp. 74-116)
42 Cf. (SPARC The Partnership for Robotics in Europe, 2013, pp. 97-98)
RICERCA AH-R-04 25
The heavy EU investment on robotics and automation is a reflection of a visionary
leadership willing to incentivize high-impact technological innovation from the strategic
levels of government. Furthermore, the development of a coordinated strategy and
roadmap shows that such investments are being made with equivalent support at the
operational (Framework Programmes) and tactical (industry and academia experts) levels.
However, the plans for Horizon 2020 are geared toward civilian applications with little
emphasis on the defence market. Nonetheless, the overall strategy and supporting
technical assessments are generic enough to be used in the defence context.
III. National strategies of leading EU Member States
The previous section discussed the strategy of the EU as a supranational organization, a
strategy focused on the civilian sector with the expectation that the development of COTS
robotics technologies for defence applications will be adopted by the governments of
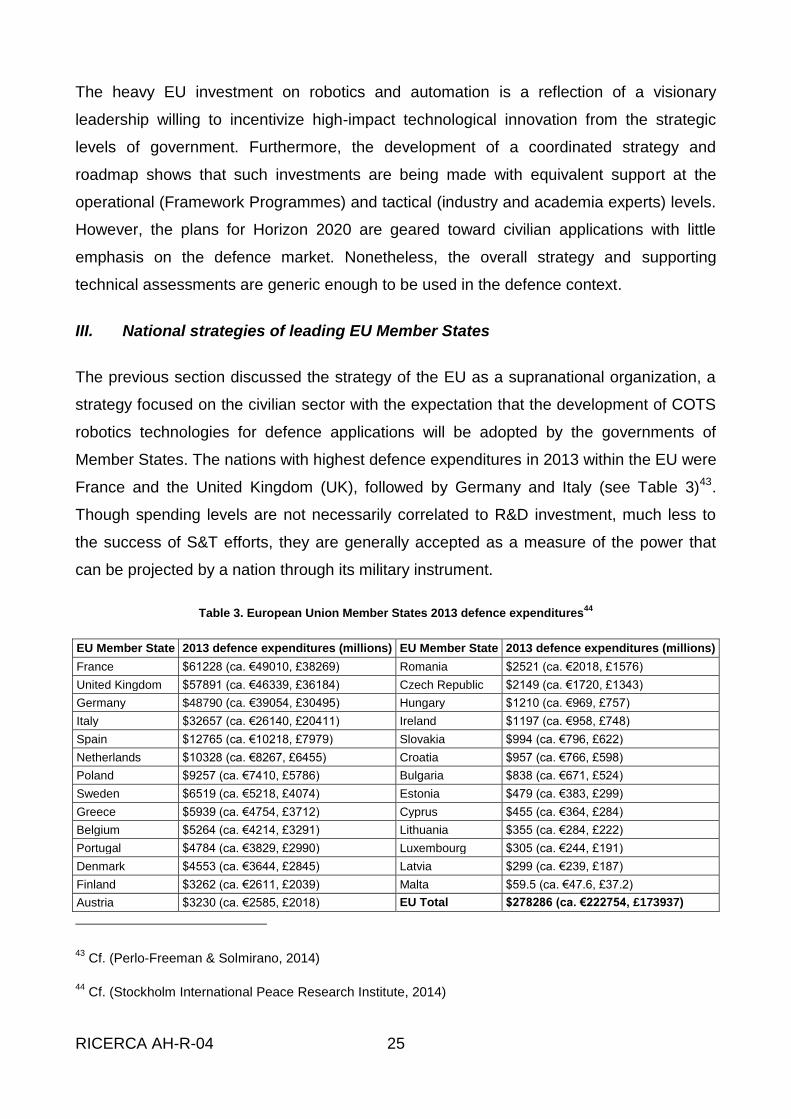
Member States. The nations with highest defence expenditures in 2013 within the EU were
France and the United Kingdom (UK), followed by Germany and Italy (see Table 3)43.
Though spending levels are not necessarily correlated to R&D investment, much less to
the success of S&T efforts, they are generally accepted as a measure of the power that
can be projected by a nation through its military instrument.
Table 3. European Union Member States 2013 defence expenditures44
EU Member State 2013 defence expenditures (millions) EU Member State 2013 defence expenditures (millions)
France $61228 (ca. €49010, £38269) Romania $2521 (ca. €2018, £1576)
United Kingdom $57891 (ca. €46339, £36184) Czech Republic $2149 (ca. €1720, £1343)
Germany $48790 (ca. €39054, £30495) Hungary $1210 (ca. €969, £757)
Italy $32657 (ca. €26140, £20411) Ireland $1197 (ca. €958, £748)
Spain $12765 (ca. €10218, £7979) Slovakia $994 (ca. €796, £622)
Netherlands $10328 (ca. €8267, £6455) Croatia $957 (ca. €766, £598)
Poland $9257 (ca. €7410, £5786) Bulgaria $838 (ca. €671, £524)
Sweden $6519 (ca. €5218, £4074) Estonia $479 (ca. €383, £299)
Greece $5939 (ca. €4754, £3712) Cyprus $455 (ca. €364, £284)
Belgium $5264 (ca. €4214, £3291) Lithuania $355 (ca. €284, £222)
Portugal $4784 (ca. €3829, £2990) Luxembourg $305 (ca. €244, £191)
Denmark $4553 (ca. €3644, £2845) Latvia $299 (ca. €239, £187)
Finland $3262 (ca. €2611, £2039) Malta $59.5 (ca. €47.6, £37.2)
Austria $3230 (ca. €2585, £2018) EU Total $278286 (ca. €222754, £173937)
43 Cf. (Perlo-Freeman & Solmirano, 2014)
44 Cf. (Stockholm International Peace Research Institute, 2014)

RICERCA AH-R-04 26
Strategic guidance drives S&T investments in leading EU Member States with France
providing an example in its strategic agenda for research, transfer and innovation by
seeking to “focus investments and R&D on fields with high business impact: advanced
products and engineering… inspection and robotics”45. However, this guidance tends to be
adopted faster in the civilian than in the defence sector. The rationale behind these
decisions lies largely on public opinion, which within most EU Member States leans toward
scepticism towards defence investments and tends to favour military intervention only in
peacekeeping and humanitarian missions 46 . Therefore, the defence S&T investment
strategies of leading EU Member States tend to be more reactive than proactive when it
comes to innovative technologies. This is exemplified by the recent “retooling of France’s
armed forces” to routinely provide UAV support to even small units, a decision driven by
the loss of 10 French soldiers during an ambush by the Taliban not far from Kabul,
“France’s biggest loss since it sent soldiers to Afghanistan in 2002”, which “might have
been avoided had the unit had a single aerial-robot scout”47. Nevertheless, this does not
mean that France and Europe have not invested in the development of advanced
unmanned and automated defence systems and. In fact, since 1999 Dassault Aviation has
led the development of the nEUROn, an experimental stealth UAV that lists among its
priorities the following:
- maintaining and developing the skills of participating European aerospace companies’
design offices, which will not see any other new fighter programs before 2030 now that
the Rafale, Eurofighter and Gripen projects are all complete or well underway;
- investigating and validating technologies that will be needed by 2015 to design next-
generation combat aircraft; and
- validating an innovative cooperation process by establishing a European industry team
responsible for developing next-generation combat aircraft48.
45 Cf. (Fioraso, 2013)
46 Cf. (Manigart, 2001)
47 Cf. (The Economist, 2012)
48 http://www.dassault-aviation.com/en/defense/neuron/introduction/

RICERCA AH-R-04 27
Though the Dassault nEUROn allows the principal EU Member States, including Italy
(through Alenia Aermacchi S.p.A.) to remain at the leading edge of technological
innovation in robotics and automation, its development was not driven by a long-term
strategic vision on defence S&T innovation, but rather on marketing strategy and clear
tendencies of the aerospace sector. This approach reflects a predisposition to shift R&D
investments to sustain national industries rather than placing the top priority on military
requirements. This predisposition is not weak or detrimental, since it sustains essential
defence industries and ensures they will be ready to support the troops should the need
arise. However, it may remove Europe from the helm of technological innovation in
robotics and automation and other emerging and potentially disturbing technologies for
defence applications49.
Even though the leading EU defence companies generally devote shares of their total
revenue to R&D well above other sectors of the economy50, “experts believe that in the
near future the most revolutionary technological advances for military capabilities will come
from R&D and innovation in the civil sector, which is expected to further encourage
convergence of civil and military R&D”51. Therefore, due to contracting defence budgets,
among other issues, leading EU Member States have mapped a course to sustain their
defence industrial base relying on innovations resulting from national and EC investments
in civilian robotics and automation R&D.
Even though the US is at the forefront of robotics and automation R&D for defence
applications, EU leading defence enterprises (namely the UK, France, and Germany)
recognize the value of robotic systems in military operations. In fact, the UK invested in the
development of Fire Shadow, a type of “loitering munition”, for its Royal Regiment of
Artillery, spending roughly £200 million (ca. €256 million, $320 million) on the first phase of
the program for “concept, assessment, demonstration and initial manufacture”52 . The
49 Cf. (European Commission, 2013)
50 e.g., R&D investments from defence firms working on ground systems amounted to 6% of revenues, while
the naval and aerospace sectors invested 10% and 12% respectively, cf. (European Commission, 2013, p. 60)
51 Cf. (European Commission, 2013, p. 60)
52 Cf. (HC 11 July 2011 vol 531 col WA48W, 2011)

RICERCA AH-R-04 28
munition was designed to travel up to roughly 100 km and loiter for approximately six
hours using sensors to track targets, with an operator-in-the-loop (OITL) to order an attack,
relocate the munition and find a better target, or self-destruct and abort the mission53. Fire
Shadow is an example of a technology developed by and available to European defence
enterprises that can easily evolve as sensing and automation capabilities advance, to
potentially minimize the requirements on operators or completely remove OITL features54.
The concerns among leading EU Member States about the evolution of robotics and
automation technologies are shared worldwide. The debate on changing rules of
engagement to remove the OITL is currently ongoing as artificial intelligence advances
and robotic and autonomous systems are becoming more capable of making lethal
decisions based on their own analyses. In fact, the UK MoD, through its Development,
Concepts and Doctrine Centre argued that if the controlling systems of UAS addressed the
principles of the law on armed conflict (military necessity, humanity, proportionality and the
ability to distinguish between military targets and civilians) and if the rules of engagement
were satisfied, then an armed strike would meet legal norms; concluding that “as
technology matures and new capabilities appear, policymakers will need to be aware of
the potential legal issues and take advice at a very early stage of any new system’s
procurement cycle”55.
C. The rise of nanotechnology
Nanotechnology emerged as a distinct field in the 1980s through theoretical and
experimental advances that drew broad interest in the atomic control of matter. Two major
breakthroughs led to the growth of nanotechnology during that decade: first, the
development of the scanning tunnelling microscope (STM) in 1981; second, the discovery
of fullerene56 in 1985 (see Figure 8). The quick growth of the field brought increased
53 http://www.mbda-systems.com/products/battlefield-engagement/fire-shadow/33/
54 Cf. (The Economist, 2012)
55 Cf. (The Economist, 2011)
56 A form of carbon having a large spheroidal molecule consisting of a hollow cage of 60 or more atoms, of
which buckminsterfullerene was the first known example. Fullerenes are produced chiefly by the action of an arc discharge between carbon electrodes in an inert atmosphere. Cf. (Oxford University Press, 2014c)

RICERCA AH-R-04 29
scientific, political and commercial awareness with some controversies arising regarding
definitions, potential applications and implications, environmental and ELS concerns, and
considerations for additional regulatory intervention57. By 1999, at the end of the US
Presidency of Bill Clinton, the US National Science Foundation (NSF) brought forth a
proposal to the White House58 that would become the US NNI, an initiative that has been
funded by the subsequent administrations59.
Figure 8. Comparison of nanomaterial sizes60
The results of more than 20 years of investments on nanotechnology already form part of
common computing and communication devices. For example, today many of our personal
57 Cf. (Science Policy Section, 2004)
58 http://www.nsf.gov/staff/staff_bio.jsp?lan=mroco&org=NSF&from_org
59 George W. Bush and Barack Obama
60 Cf. (Panneerselvam & Sangdun, 2014)
RICERCA AH-R-04 30
computing devices have magnetic random access memory (MRAM) to save data during
system crashes and allowing quick storage and retention of data encryption during
shutdown, as well as saving vehicle data in accidents for later analysis. Defence systems
requiring radiation-hard, non-volatile memory also use MRAM based on nanometre-scale
magnetic tunnel junctions 61 . Nanotechnology is also essential in novel light-trapping
technologies with potential defence applications as sources, switches, and detectors of
electromagnetic radiation in the visible, near-infrared, and mid-infrared frequency regimes.
Advanced materials are another example of defence applications of nanotechnology,
where stronger, yet lighter structural materials are always in high demand and innovative
smart materials are increasingly used.
As nanotechnology R&D continues to make great strides and its products penetrate the
civilian and defence markets with far-reaching applications, the implications of industrial-
scale manufacturing on health and the environment are areas of concern. Government
regulation and oversight of industrial activities, as well as awareness of R&D activities, risk
management, and strategic planning will guarantee an adequate development of
nanotechnology and a supportive public engagement on its applications.
D. Leading strategies and policies on nanotechnology
Nanotechnology presents innovative opportunities to identify new technologies or improve
existing ones. This relatively new field provides an opportunity for smart growth and
employment opportunities while simultaneously addressing many of our social concerns
(e.g., diminishing resources, climate change, ageing populations, etc.). More importantly,
nanotechnology provides additional options for effective military operations, supporting our
soldiers, sailors, and airmen as they face future conflicts and humanitarian crises.
Since 2000, the US has led investment in nanotechnology62 through its NNI, while the EC
has spent an estimated €2.2 billion (ca. $2.7 billion, £1.7 billion) through its Framework
Programmes for Research and Technological Development63. These figures place Europe
61 Cf. (Roco, et al., 2010)
62 Over $67 billion (ca. €54 billion, £42 billion), cf. (Nano Sciences and Nano Technologies Unit, 2013)
63 Estimated aggregate, cf. (Nano Sciences and Nano Technologies Unit, 2013)

RICERCA AH-R-04 31
within the top three global investors in nanotechnology, between the US and Japan. The
US is the global leader in nanotechnology R&D and its NNI serves as the vehicle for
securing US government financing and support achieving the vision and objectives
established in the Strategic Plan. The NNI works at the grand strategy level, seeking a
whole-of-government approach in establishing a vision, securing funding and political
support, managing R&D activities, and addressing concerns about future and existing
applications.
Europe has also sought to capitalize on this emerging market and its current and future
potential by following the evolution of nanotechnology at the highest levels of the EU and
EC. Furthermore, EU Member States continue to sponsor and carry out R&D activities in
nanotechnology through centres such as the London Centre for Nanotechnology in the
UK, the French Alternative Energies and Atomic Energy Commission (Commissariat à
l'énergie atomique et aux énergies alternatives) Leti institute, the German Center of
Advanced European Studies and Research, and the Italian National Research Council
(CNR, Consiglio Nazionale delle Ricerche) Nanoscience Institute (NANO, Istituto
Nanoscienze). In general, these organizations carry out basic and applied R&D activities
to advance the state-of-the-art of nanotechnology as emerging and enabling technologies.
I. United States
The US has led the way establishing a thriving environment for nanotechnology R&D. Just
a decade after nanotechnology emerged as a recognised field, the US government took
the lead and established its NNI, which has not only expanded scientific understanding of
nanoscale phenomena, but supported the development and engineering of numerous
applications through an extensive system of universities, laboratories, research centres,
and industrial infrastructure. US government investments in nanotechnology have placed
the nation at the leading edge in this sector, able to exploit cutting-edge technologies to
focus on national priorities, address social problems, strengthen the social contract
between science and society, and inspire students to pursue careers in science,
technology, engineering, and mathematics fields64. The NNI provides whole-of-government
support of nanotechnology, including for national defence purposes.
64 Cf. (Subcommittee on Nanoscale Science, Engineering, and Technology, 2014)

RICERCA AH-R-04 32
The US DoD, through the vision of its Assistant Secretary of Defense for Research and
Engineering, ASD(R&E), “includes nanoscience and engineering as one of six high-
interest basic-science areas, along with synthetic biology, quantum information science,
cognitive neuroscience, human behaviour modelling, and novel engineered materials”65.
Furthermore, the US DoD has identified multiple key applications of nanotechnology,
strongly supporting basic and applied R&D in this sector:
- New classes of electronics and sensors;
- Chemical catalysts;
- High-strength materials; and
- Energetic materials.
At the operational and tactical levels (see Figure 4) the US Army provides strategic
guidance that is executed by key partners in the private sector and academia delivering
research in support of the soldier. For example, the Massachusetts Institute of Technology
(MIT) Institute for Soldier Nanotechnologies (ISN) receives guidance and support from the
US Army Research Office (ARO) and has organized its research into five Strategic
Research Areas (see Table 4)66. These areas have resulted in many basic and applied
research projects to support the next-generation soldier.
Table 4. Strategic Research Areas of the MIT ISN
Area Description
Lightweight, Multifunctional Nanostructured Materials
Emphasizes the creation of nanoscale and nanostructured building blocks to provide diverse protective capabilities such as sensing, communications, night vision, electronic devices, and visibility management.
Soldier Medicine - Prevention, Diagnostics, and Far-Forward Care
Concerned with research that can lead to improved medical and combat casualty care for the Soldier.
Blast and Ballistic Threats - Materials Damage, Injury Mechanisms, and Lightweight Protection
Develop new, lighter weight protective materials systems for improved protection from blast, ballistic, and blunt trauma, as well as to obtain increased understanding of materials failure and human injury due to blast and other forms of mechanical energy.
Hazardous Substances Sensing Focuses on exploring and enabling new mechanisms for the high-sensitivity detection of molecularly complicated hazardous substances.
Nano-systems Integration: Flexible Capabilities in Complex Environments
Integration of nanoscale and nano-enabled materials and devices into systems that provide the Soldier with enhanced flexibility to operate in complex environments.
65 Cf. (Subcommittee on Nanoscale Science, Engineering, and Technology, 2014, p. 9)
66 http://isnweb.mit.edu

RICERCA AH-R-04 33
The US Navy also provides strategic guidance that includes nanotechnologies as enablers
for systems and capabilities 67 . For example, aside from the clear capabilities that
nanoscale sensors and electronic devices provide the fleet as it seeks to assure access to
the maritime battlespace, these sensors also support the US Marine Corps as naval
infantry units when they carry out expeditionary and irregular warfare. Nanotechnology is
also a key enabler of advanced platform design and survivability, a great example being
improvements in structural health monitoring systems for damage detection and
characterization. Moreover, nanotechnologies are central to reducing total ownership cost
by decreasing lifecycle and sustainment costs while improving operational capabilities and
enhancing war-fighter performance. Table 5 lists many of the research areas identified in
the US Naval S&T Strategic Plan that are and can be further enabled by
nanotechnology 68 . Therefore, nanotechnology plays a key enabling role in the
technological superiority future envisioned by US naval strategists.
Table 5. Nanotechnology as an enabler in support of US naval S&T strategy
Advanced energetics Advanced naval power systems
Advanced sea platforms
Affordability/reduced platform lifecycle cost
Air platform power
Air platform survivability
Air/ground vehicles Anti-submarine warfare surveillance
Bio-derived materials and systems
Bio-sensors, bio-processes and bio-inspired systems
Casualty care and management
Casualty prevention
Communications and networks
Complex software systems tools
Electronic warfare attack
Environmental quality Expeditionary force protection
Functional materials
Information processing, discovery, integration and presentation
Intelligent and autonomous systems
Littoral geosciences, optics and biology
Manufacturing science Materials, computation and prediction
Nano-meter scale electronic devices and sensors
Personal power Power electronics
Precision strike Sea-platform survivability
Solid-state electronics
Spacecraft technology
Structural materials UAV technologies
Undersea medicine
Undersea weaponry USV technologies
Weapons of mass destruction detection
US defence S&T strategies have identified numerous applications for nanotechnology in
support of soldiers and war-fighters at large, many of them with potential dual uses in the
civilian sector. Through these strategies the US has focalised R&D investments that are
already providing returns in multiple sectors and supporting soldiers in their mission.
67 Cf. (Office of Naval Research, 2011, pp. 55-57)
68 Ibid.

RICERCA AH-R-04 34
II. European Union
The EU has been a world leader in the development of nanotechnology, with the EC
explicitly including nanotechnology as a theme of its research funding programmes over
the past decade and supporting scientists through the European Research Council (ERC).
With the impending closing of the current Framework Programme (FP7), the EC promises
to capitalise on the research foundations that have been laid trying to turn intellectual
capital into commercial technologies through the next programme, Horizon 2020. The new
regime framework aims to tackle the perceived shortfall in technology transfer, placing
Europe in a strong position to grasp new opportunities in the commercialization of
emerging nanotechnologies across multiple sectors69.
The Framework Programmes for Research and Technology Development cover a broad
spectrum of R&D for civilian and security uses and therefore, the EC has identified broad
areas of R&D (see Figure 9) where nanotechnology projects have been carried out and
are likely to have the greatest impact in the medium range (i.e., 5 – 15 years). Research in
nano-electronics seeks to go beyond the limits of existing complementary metal-oxide-
semiconductor (CMOS) technologies and develop novel transistors, switches, and
interconnects that improve operating speeds, help dissipate heat, and reduce power
consumption. These advances herald the next generation of memory devices; ultra-
sensitive, reliable and easy-to-use sensors; batteries and power transmission lines; and
affordable and efficient solid-state light-emitting diodes. Likewise, research in nano-
photonics could yield the next generations of lasers, solar cells, and optical interconnects
between computer chips. More importantly, nano-photonics research has the potential to
revolutionize information processing capabilities and nano-photonic devices could serve as
the basis for massive parallel processing of high-volumes of information, including data
from radar systems. The EC has focused R&D into sectors that can potentially produce
palpable next-generation technologies, but has also conducted research of a strategic
nature (communication and societal impact) that has produced broad taxonomies for basic
S&T products, established best practices for nanomaterials safety testing, and addressed
ELS concerns.
69 Cf. (Nano Sciences and Nano Technologies Unit, 2013)

RICERCA AH-R-04 35
Figure 9. Nanotechnology R&D areas
The products of EC-funded nanotechnology R&D are poised for integration into the
advanced technologies impacting everyday life and COTS solutions that address the
requirements of the soldier of the future. However, as with robotics within the EU, the
defence applications of nanotechnology are considered a responsibility of Member States,
while EDA seeks to foster defence cooperation and enhance the effectiveness of EDRT
through armaments cooperation. These initiatives are driven by the requirements of the
EC Common Security and Defence Policy, which seeks to leverage the sovereign defence
requirements of EU Member States and the capabilities provided by NATO.
Though the decentralized European approach to defence poses many challenges and
defence budgets are fairly limited, there are multiple tools at the disposal of individual EU
Member States to facilitate cooperation and collaboration while reducing duplication of
efforts and exploiting the state-of-the-art. Moreover, given that the EU has taken a lead
role in the development of nanotechnologies through basic and applied research funded
by the Framework Programmes, the defence enterprises of leading Member States can
become key integrators of these technologies in the medium range and provide innovative
applications and transition mechanisms in the defence and security market.
Nanotechnology is becoming increasingly important to military strategists and military R&D
by leading NATO and EU Member States has made up a substantial share of funding on
the topic. Within the EU, the UK and Sweden have made specific investments into
nanotechnology R&D; however, both their defence enterprises consider research in the
Nano-electronics Nano-photonics Nano-
biotechnology Nano-medicine
Self-assembly Catalysts Industrial
applications Energy and
environment
Tools Health, safety
and environment
Communication and societal
impact
RICERCA AH-R-04 36
sector to be driven mainly by commercial rather than defence requirements, in lockstep
with the EU position. Nonetheless, NATO and EU Member States are aware of the
promising military applications of nanotechnology, including lighter, stronger, heat-resistant
materials that can be used in all weapon systems and provide significant energy savings,
or even next-generation camouflage. Nanotechnology is perceived as the enabler for
“smart” munitions, uniforms, and autonomous systems (among many other applications)70.
E. Benefits, limitations, and concerns
The future of robotics and automation poses numerous risks, particularly as machines
evolve toward autonomy. Unmanned systems with lethal capabilities are real and
operational in leading militaries around the world, particularly within NATO and the EU.
Policy makers are already facing serious ethical and legal issues with significant societal
implications as full robotic autonomy evolves. Today unmanned systems are remote
controlled and there is always a human-in-the-loop to make a lethal decision and
therefore, the operator is responsible and liable for the decision. The future may not be so
straightforward.
At a basic level, liability concerns in the defence and security sectors mirror those of the
automotive industry when it comes to self-driving vehicles (i.e., who is liable, the operator
or the manufacturer, etc.). What is more, autonomous military systems with lethal
capabilities pose additional issues regarding the laws of war, in particular compliance with
the Law of Armed Conflict (LOAC) and the constraints that define acceptable wartime
conduct – jus in bello – particularly the concepts of distinction and proportionality. As
advanced autonomous systems become operational, their degree of autonomy must be
regulated by their ability to flawlessly follow the LOAC. Additionally, robotic systems,
whether remotely controlled or completely autonomous, will ultimately operate in contested
environments, making system resiliency and survivability two key issues for R&D in the
next three decades. A recent study conducted by the Joint Air Power Competence Center
addresses some of those concerns and offers recommendations that are focused on air
vehicles, but which can be easily extrapolated to ground systems71.
70 Cf. (Ibrügger, 2005)
71 Cf. (Haider, 2014, pp. 82-98)

RICERCA AH-R-04 37
When it comes to nanotechnology, part of the support provided by leading NATO and EU
Member States towards R&D has been devoted to addressing ELS. In fact, the US,
through its NSF, has sponsored two centres for “Nanotechnology in Society”, which
together provide the largest nanotechnology-related ELS research in the world72. Key
themes of ELS research include:
- Equitable global development of nanotechnology: though R&D in developing countries
is rapidly improving, there is limited progress in the Global South (i.e., Africa, Latin
America, and developing Asia, including the Middle East);
- Recommended environmental, health, and safety (EHS) practices: disposal and waste
management best practices of engineered nanomaterials and nanotechnology-enabled
products are not widespread;
- Risk and benefit perception: given the small scales of nanotechnology products and
their potential to become health hazards, engagement with the public and strong
regulation are required to ensure risks are mitigated and benefits from R&D are
maximized.
EHS concerns are also key inputs to the public perception of risks and benefits of
nanotechnology. Given the potential and unexpected risks of nanotechnology, in 2007
DuPont and Environmental Defense partnered to “develop a framework for the responsible
development, production, use, and end-of-life disposal or recycling of engineered
nanoscale materials”73 (see Figure 10). With this framework the DuPont – Environmental
Defense partnership developed a flexible process to answer key issues that users should
consider in determining and managing the risks of nanotechnology products. Risks include
health hazards (e.g., toxicity, skin sensitization/irritation), environmental hazards (e.g.,
aquatic and terrestrial toxicity to flora and fauna, biodegradability/bioaccumulation), and
safety hazards (e.g., flammability, reactivity, rate of corrosion). Evaluating risks throughout
the product’s lifecycle is key feature of the framework, which in turn supports informed
decisions, documentation, and responsible action and decreases the likelihood of
unforeseen consequences.
72 Cf. (Subcommittee on Nanoscale Science, Engineering, and Technology, 2014, p. 64)
73 Cf. (Environmental Defense - DuPont Nano Partnership, 2007)

RICERCA AH-R-04 38
Figure 10. Iterative nano risk framework74
Leading NATO and EU Member States have not only invested heavily on nanotechnology
R&D, but have also voiced their concerns about these technologies. In fact, there have
been repeated calls to identify the information needed to regulate and oversee the safe
development and use of nanotechnologies75.
Europe leads the way investing in nanotechnology risk research with the UK Royal Society
identifying risks from nanoparticles or nanotubes being released during disposal,
destruction and recycling and recommending that “manufacturers of products that fall
under extended producer responsibility regimes such as end-of-life regulations publish
procedures outlining how these materials will be managed to minimize possible human
and environmental exposure”76. In fact, the UK approach to regulation mirrors overarching
European law and uses the precautionary principle, which “comes into play when there is
a lack of full scientific certainty about the threat of harm from the substance”77.
74 Cf. (Environmental Defense - DuPont Nano Partnership, 2007)
75 Cf. (Hearing on The National Nanotechnology Initiative Amendments Act of 2008, 2008)
76 Cf. (Science Policy Section, 2004, p. xii)
77 Ibid., p. 69
Assess, prioritize, and generate data
Describe material and application
Profile lifecycle(s)
Evaluate risks
Assess risk management
Decide, document,
and act
Review and adapt

RICERCA AH-R-04 39
Nanotechnologies have the potential for offensive and defensive military uses, and
therefore raise a number of social and ethical issues. Developing nano-biotechnologies to
enhance human performance, information processing, and cognitive capabilities could
raise profound ethical questions. The most likely initial impact of nanotechnology in the
defence sector is in advanced information systems that use large number of nano-sensors
and enable capabilities for early detection of chemical or biological releases as well as
persistent surveillance, closely followed by advances in military equipment, including
armour, uniforms, and personal communications. These developments are not foreseen to
result in negative perceptions of the soldier78.
Nanotechnology can also advance the manipulation of chemical and biological agents,
resulting in new and resilient threats. Moreover, nanotechnologies may increase the range
of asymmetric power relations since the main focus on nanotechnology comes from the
civilian sector and intellectual property and research results are readily available to broad
audiences, including belligerent state and non-state actors around the globe79. The public
perception of nanotechnologies remains positive and closely linked to its impact in the
civilian sector. Transparency and careful assessments of the impact and risks of
nanotechnologies as they transition to military and soldier applications will ultimately drive
public perception on future capabilities.
78 Cf. (Science Policy Section, 2004, pp. 55-56)
79 Ibid.

RICERCA AH-R-04 40
3 A VISION FOR THE ITALIAN DEFENCE ENTERPRISE
“A love of tradition has never weakened a nation, indeed it has
strengthened nations in their hour of peril; but the new view must
come, the world must roll forward… Let us have no fear of the
future.”
Sir Winston Churchill80
Technological innovation is a constantly-evolving process and robotics and
nanotechnology offer endless opportunities to improve the performance, capabilities, and
overall wellbeing of ground troops prior, during, and after combat operations. Lighter
materials combined with advanced sensors and embedded high-performance computing
systems that not only process vast amounts of data, but make autonomous decisions as
partners to our warriors were the stuff of science fiction 20 years ago, but today’s
advances in nanotechnology and robotics are already shaping the soldier of the future.
Italy, as one of the leading NATO and EU Member States, is a key player in the R&D of
advanced robotics technologies through guidance and support from the government
(defence and civilian sectors alike) and the expertise of academia and research centres.
Moreover, Italy is currently capable to transition the products of R&D in robotics and
nanotechnology to operational defence systems through its first-rate industrial enterprises
as well as its innovative small and medium-sized enterprises. Therefore, this section seeks
to provide an assessment of the current state-of-the-art in robotics and nanotechnology
and recommend defence R&D investments that will maintain Italy at the leading edge of
global innovation.
80 Cf. (HC Deb 29 November 1944 vol 406 c31)

RICERCA AH-R-04 41
A. A vision for robotics and automation
The Italian soldier must have capabilities on par or exceeding those of NATO and EU
counterparts, but tailored to the particular requirements of the Italian Army as it supports
the future defence operational model:
- defending the territory and vital national interests;
- succeeding in ongoing operations and possible future international commitments;
- deterring and preventing future conflicts within the framework of existing alliances;
- participating in whole-of-government reactions to national emergencies and
international crises81.
The mission of the Italian soldier is geared both to support international contingencies as
well as national crises, which require an effective, yet versatile balance of equipment and
personnel. Given the strategic and geopolitical situation of the Italian peninsula in the
Mediterranean, on the crossroads of three continents, Italy finds itself relatively close to
ongoing armed conflicts in Eastern Europe, North Africa, and the Middle East. Though the
risks of armed invasion seem farfetched, the repercussions of conflict in the region are
constantly felt in the form of mass immigration and threats of terrorism. Moreover, social
and demographic factors continue to reduce the numbers of active military personnel, with
the Army, as the larger Armed Force, bearing the brunt of cuts 82 . Robotics and
nanotechnology offer opportunities to augment capabilities and provide the defence and
security the Italian public expects from its Armed Forces, in particular its soldiers.
Today advances in robotics are applied in many fields including agriculture, industrial
manufacture, and healthcare among many others. The state-of-the-art in prosthetics is
largely based on robotic systems and can restore some capabilities to soldiers injured in
combat and otherwise83. Advanced robotic exoskeletons can enhance the performance of
soldiers in the field, increasing their speeds during marches and allowing them to carry
81 Cf. (Il Ministro della Difesa, 2014, p. 7)
82 Cf. (Ministero della Difesa, 2014)
83 http://robotica.mecc.polimi.it

RICERCA AH-R-04 42
more weight84. Moreover, the UAV is a vital source of ISR data to ground troops, providing
them with early warning of enemy threats as well as enabling forces to coordinate their
actions for superior effects and lethality. Meanwhile, the UGV has replaced the soldier in
many hazardous situations, particularly disarming or removing explosives, or drawing fire
from the enemy to reduce casualties, but also providing ground surveillance for perimeter
security. The UGV is also used in civilian contingencies and has proved essential repairing
reactors after the Fukushima Daiichi nuclear disaster.
The future of robotics will bring advanced capabilities to the Italian soldier through
advances made possible in part by domestic R&D and technology transfer. Figure 11
shows an assessment of future advances in robotics across the spectrum of innovation85.
This assessment is a broad, yet simple tool to guide basic R&D and robotics toward the
next generation of systems in support of the soldier.
Figure 11. The future of robotics and unmanned systems innovation for military applications
At the sustained evolution level 86 there are four key areas that will see significant
improvements as expected by defence users:
- Security – data link security is one of the key issues that must be addressed to avoid
hostile interference or tampering with friendly robotic systems;
84 http://www.sssup.it/ist_home.jsp?ID_LINK=10458&area=199
85 Cf. (Christensen, 1997)
86 Innovation that improves products in existing markets as expected, ibid.
Sustained Evolution
•Security
•High-performance computing
•Interoperability and modularity
•Weaponry
Sustained Revolution
•Resilience
•Autonomy and cognitive behaviour
•Swarm robots
Disruption
•Reconfigurable robots
•Self-replicating robots

RICERCA AH-R-04 43
- High-performance computing – continued advances in computing capabilities coupled
with growing quantities of sensor data will enhance the situational awareness of both
the soldier and its robotic partner(s), while providing the foundation for next-generation
autonomous and resilient systems;
- Interoperability and modularity – as robotic systems proliferate across the range of
military operations so will the requirement for interoperable and modular systems that
can use the latest payloads and software while supporting soldiers and their Navy and
Air Force partners;
- Weaponry – armed unmanned systems have already proven their worth in combat,
exhibiting greater persistence and endurance than their manned counterparts, with the
potential to support a large range of mission sets and Italian industry is already in a
position to develop and produce advanced UGV platforms87; the next logical step in the
evolution of armed robotic systems will be closely linked to advances in autonomy and
cognitive behaviour.
At the sustained revolution level88 robotics innovation will provide unexpected solutions to
defence capability gaps; however, there are foreseen advances that may be perceived as
revolutionary within the next 15 years:
- Resilience – communication systems must be resilient against interference to provide
robust and persistent capabilities to operators and commanders while improvements in
autonomy will allow robotic systems to operate autonomously in contested
environments, degrading gracefully as they carry out their tasks and missions;
- Autonomy and cognitive behaviour: autonomous robotic systems will become attractive
solutions to national defence and contingency operations given the constraints placed
on the Italian Armed Forces by reduced manning and the fact that more than 70% of
the Italian Defence budget goes to personnel 89 ; moreover, autonomy and higher
cognitive behaviour in robotic systems will reduce casualties and costs in combat
87 http://www.otomelara.it/products-services/robotics-systems/trp2-combat?WT.ac=TRP2%20-
%20COMBAT
88 Unexpected innovation with little to no impact on existing markets (Christensen, 1997)
89 Cf. (Ministero della Difesa, 2014)
RICERCA AH-R-04 44
operations, particularly as systems evolve to execute missions independently and in
contested environments;
- Swarm robots – the survivability, resiliency, interoperability, and overall effectiveness of
robotic systems can be multiplied with the deployment of swarm robots, a concept that
has been the focus of numerous R&D efforts for various applications in different
operational domains; operating in squads to achieve objectives, robots can become
revolutionary force multipliers.
Disruptive innovation90 in defence robotics, though unexpected by definition, may come in
the form of progress in two key R&D topics:
- Reconfigurable robots – reconfigurable robots are a topic of R&D with the potential to
disrupt military operations as autonomous systems independently choose and modify
their payloads for specific tasks or missions or change their configuration based on
environmental conditions;
- Self-replicating robots – the ability to reproduce autonomously using raw materials can
pose significant challenges or opportunities for the soldier; the technologies necessary
to develop such machines already exist; self-replicating robots, along reconfigurable
robots and swarms could be a powerful force multiplier in asymmetric warfare and
therefore their development must not go unnoticed.
The most palpable robotic systems available to soldiers on the ground are UGV platforms.
The future of robotic systems is closely tied to their level of autonomy, and future UGV
platforms will be able to, among many other capabilities:
- Navigate without human assistance;
- Gather information about their operational environment and detect and categorize
objects with minimal human interference;
- Work independently;
- Disarm or remove explosives autonomously; and
- Self-repair or operate in a degraded state.
90 Innovation that creates a new market by applying a different set of values and ultimately (and
unexpectedly) overtakes an existing market (Christensen, 1997)
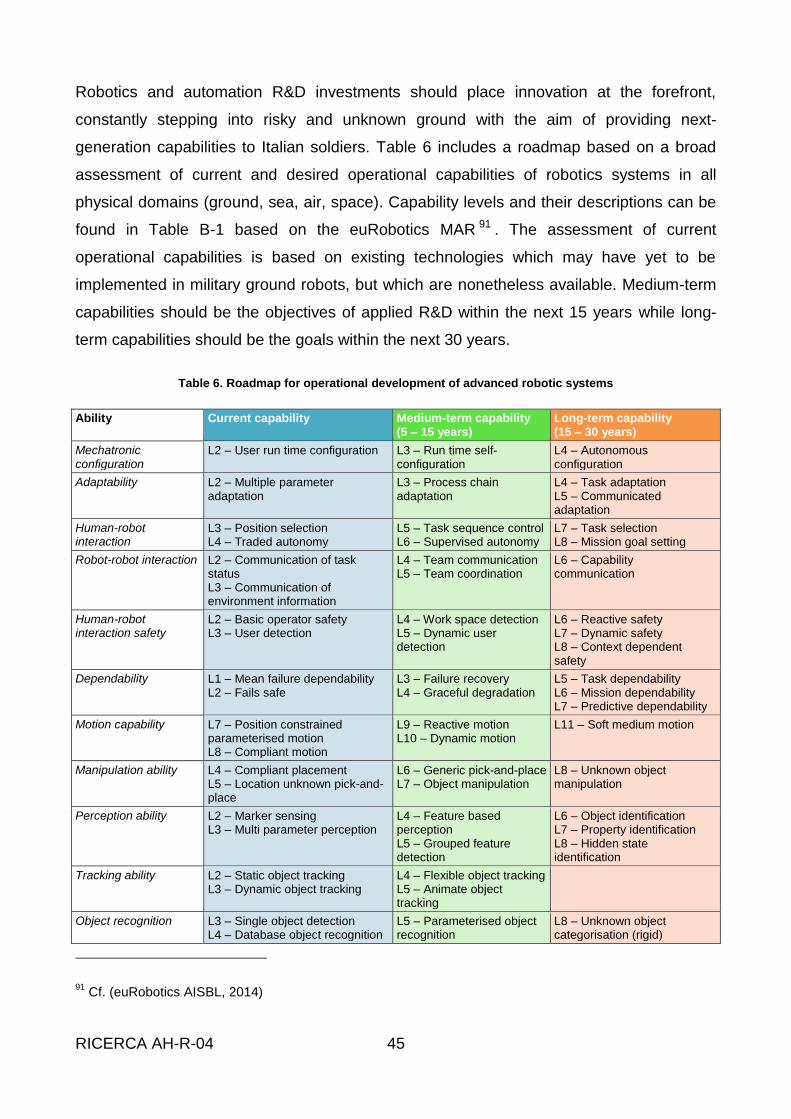
RICERCA AH-R-04 45
Robotics and automation R&D investments should place innovation at the forefront,
constantly stepping into risky and unknown ground with the aim of providing next-
generation capabilities to Italian soldiers. Table 6 includes a roadmap based on a broad
assessment of current and desired operational capabilities of robotics systems in all
physical domains (ground, sea, air, space). Capability levels and their descriptions can be
found in Table B-1 based on the euRobotics MAR 91 . The assessment of current
operational capabilities is based on existing technologies which may have yet to be
implemented in military ground robots, but which are nonetheless available. Medium-term
capabilities should be the objectives of applied R&D within the next 15 years while long-
term capabilities should be the goals within the next 30 years.
Table 6. Roadmap for operational development of advanced robotic systems
Ability Current capability Medium-term capability (5 – 15 years)
Long-term capability (15 – 30 years)
Mechatronic configuration
L2 – User run time configuration L3 – Run time self-configuration
L4 – Autonomous configuration
Adaptability L2 – Multiple parameter adaptation
L3 – Process chain adaptation
L4 – Task adaptation L5 – Communicated adaptation
Human-robot interaction
L3 – Position selection L4 – Traded autonomy
L5 – Task sequence control L6 – Supervised autonomy
L7 – Task selection L8 – Mission goal setting
Robot-robot interaction L2 – Communication of task status L3 – Communication of environment information
L4 – Team communication L5 – Team coordination
L6 – Capability communication
Human-robot interaction safety
L2 – Basic operator safety L3 – User detection
L4 – Work space detection L5 – Dynamic user detection
L6 – Reactive safety L7 – Dynamic safety L8 – Context dependent safety
Dependability L1 – Mean failure dependability L2 – Fails safe
L3 – Failure recovery L4 – Graceful degradation
L5 – Task dependability L6 – Mission dependability L7 – Predictive dependability
Motion capability L7 – Position constrained parameterised motion L8 – Compliant motion
L9 – Reactive motion L10 – Dynamic motion
L11 – Soft medium motion
Manipulation ability L4 – Compliant placement L5 – Location unknown pick-and-place
L6 – Generic pick-and-place L7 – Object manipulation
L8 – Unknown object manipulation
Perception ability L2 – Marker sensing L3 – Multi parameter perception
L4 – Feature based perception L5 – Grouped feature detection
L6 – Object identification L7 – Property identification L8 – Hidden state identification
Tracking ability L2 – Static object tracking L3 – Dynamic object tracking
L4 – Flexible object tracking L5 – Animate object tracking
Object recognition L3 – Single object detection L4 – Database object recognition
L5 – Parameterised object recognition
L8 – Unknown object categorisation (rigid)
91 Cf. (euRobotics AISBL, 2014)

RICERCA AH-R-04 46
Ability Current capability Medium-term capability (5 – 15 years)
Long-term capability (15 – 30 years)
L6 – Context recognition L7 – Novelty recognition
L9 Object property detection L10 – Flexible object detection L11 – Flexible object classification L12 – Animate objects L13 – Pose estimation
Scene perception L2 – Static structures L3 – Combined structures
L4 – Multiple object detection L5 – Object arrangement detection L6 – Dynamic object detection
Location perception L3 – Feature based location L4 – Mapped location
L5 – Self location L6 Object coupled location
Decisional autonomy L4 – Simple autonomy L5 – Task autonomy
L6 – Constrained task autonomy L7 – Multiple task autonomy L8 – Dynamic autonomy
L9 – Mission oriented autonomy L10 – Distributed autonomy
Action ability L1 – Defined action L2 – Decision based action
L3 – Sense driven action L4 – Optimised action L5 – Knowledge driven action
L6 – Plan driven actions L7 – Dynamic planning L8 – Task action suggestions L9 – Mission proposals
Interpretive ability L2 – Basic environment interpretation L3 – Object delineation
L4 – Object category interpretation L5 – Structural interpretation
L6 – Basic semantic interpretation L8 – Novelty interpretation L9 – Environmental affordance
Envisioning ability L2 – Dynamic motion prediction L3 – Function projection
L4 – Rigid interaction prediction L4 – Flexible object interaction L6 – Basic environment envisioning
L7 – Envisioning safety L8 – Envisioning user responses
Acquired knowledge L6 – Knowledge scaffolding L7 – Requested knowledge
L8 – Distributed knowledge L9 – Interaction acquisition L10 – Object function
L11 – User knowledge L12 – Critical feedback L13 – Long term observation L14 – Patterns of behaviour L15 – Observation learning
Reasoning L3 – Basic environment reasoning L4 – Reasoning with conflicts
L5 – Dynamic reasoning L6 – Safety reasoning
L7 – Task reasoning L8 – Task hypothesis
Object interaction L1 – Environmental context utilisation L2 – Property identification
L3 – Object placement L4 – Composite object manipulation
L5 – Generalised object manipulation L6 – Novel object manipulation L7 – Use of affordances
Human interaction ability
L1 – Fixed interaction L2 – Task context interaction
L3 – Object and location interaction L4 – Robot-triggered interaction
L5 – Social interaction L6 – Complex social interaction L7 – Intuitive interaction
Overall, improvements in autonomy are persistent at all levels of innovation, impacting
multiple components of robotic systems (i.e., as autonomy improves so does the quality of
sensor data, human-robot interaction, navigation, etc.). Autonomy is a fairly evolutionary
adaptation with revolutionary implications in the long term, with lessons learned as
repetitive or difficult tasks continue to be identified and from operators that identify issues
for improvement. These issues and tasks are and will continue to be addressed in new

RICERCA AH-R-04 47
unmanned system designs. Therefore, the level of autonomy will “continue to progress
from today’s fairly high level of human control/intervention to a high level of autonomous
tactical behaviour that enables more timely and informed human oversight”92.
B. Nanotechnology in support of ground forces
Nanotechnology is an enabler that offers innumerable opportunities to the soldier, from
improved performance to fast or self-healing abilities. Current nanotechnology research
may produce implants that reverse the effects of retrograde amnesia caused by brain
damage. Swarms of nano-robots may provide advanced self-healing capability to soldiers
or nano-implants regulating the nervous system can moderate the pain or inflammation
caused by injuries to allow faster healing93. Soldier helmets with embedded sensors and
active or adaptive camouflage could be a reality within the next decade. Large amounts of
data from embedded sensors could be quickly processed with fast-running
nanotechnology-enabled computers to provide advanced situational awareness displayed
in contact lenses that are the next generation of today’s Google Glass94.
Italy has provided significant investments into nanotechnology R&D with the CNR NANO
and the Italian Institute of Technology (IIT, Istituto Italiano di Tecnologia) leading the
charge. The IIT Centre for Bio Nanotechnologies in Lecce is a recognized leader in the
development of nanomaterials of various sizes and with different chemical and physical
properties to address the requirements established by its customer in academia and
industry. Some of the products of R&D are currently transitioning to develop the next
generation of solar cells with nano-structures that can replace silicon, significantly
improving energy efficiency and reducing costs. More importantly, a strategic vision that
includes nanotechnology as the enabler of next-generation technologies is well
established and involves the imminent intersection with robotics.
Italy is well positioned to continue domestic R&D and production of nanotechnologies that
will ensure soldiers are supported by innovative and state-of-the-art capabilities and that
92 Cf. (Department of Defense, 2009, p. 27)
93 http://www.livescience.com/47890-self-healing-implants-darpa.html
94 http://www.technologyreview.com/news/515666/contact-lens-computer-like-google-glass-without-
the-glasses/

RICERCA AH-R-04 48
will guarantee control in national emergencies, civilian and military alike. Based on the
assessment in the previous for robotics, Figure 12 shows future trends in nanotechnology
research that will provide advanced capabilities across the innovation spectrum.
Figure 12. Nanotechnology applications for the soldier of the future
Beginning at the sustained evolution level, today nanotechnology can improve existing
capabilities in support of the soldier as follows:
- Focal-plane arrays – exploiting nano-materials to develop the next generation of image
sensors will provide significant advances in missile guidance systems and thermal
imaging and Italy is at the forefront of innovation in this sector95,96;
- Photo-catalytic coatings – the applications of photo-catalysis R&D range from self-
sterilizing coatings for food on the field, through the sterilization of surgical instruments
to the removal of contaminants from oil spills;
- Communication systems – nano-antennas and electronics will continue to reduce the
size of communications systems while providing advanced capabilities to soldiers on
the ground;
- Energetic materials – energetic materials are the core of explosives, pyrotechnic
compositions, propellants and fuels; nano-energetic materials have proven capable of
storing more energy than conventional materials, which makes them suitable for next-
95 http://www.nano.cnr.it/index.php?mod=men&id=222
96 http://www.sssup.it/ist_context.jsp?ID_LINK=10512&area=199
Sustained Evolution
• Focal-plane arrays
• Photo-catalytic coatings
• Communications systems
• Energetic materials
Sustained Revolution
• Active micro-electronic devices
• Wearable computers and sensors
Disruption
• Quantum technology
• Nano-robotics

RICERCA AH-R-04 49
generation weapons, including bullets; however, nano-energetic materials are also
capable of supporting the creation of smaller nuclear bombs and may create
challenges for arms control efforts.
Sustained revolution in nanotechnologies may be shaped by investments into:
- Active micro-electronic devices – most micro-electronic devices available today tend to
be passive, i.e., they do not require power to operate, while the next-generation of
micro-electronic devices will require a source of energy, possibly exploiting
nanotechnology as well to guarantee a lighter batteries and other power sources;
- Wearable computers and sensors – the soldier of the near future will be supported by
wearable sensors and computers that are light and capable in great part due to
nanotechnology and allow him/her to operate more freely in combat while retaining
situational awareness.
Disruption from advances in nanotechnology, though not entirely predictable, may come
from two main R&D topics:
- Quantum technology – the potential applications of quantum technology go beyond
breaking cryptographic algorithms and include techniques such as “ghost imaging”97
that could be applied to see through turbulence or smoke or in artificial neural networks
that require learning and functionality from observations (e.g., in robotics for pattern
recognition, scene recognition, etc.);
- Nano-robotics – an emerging field with great potential for disruptive military
applications, and as tends to be the case with disruptive innovation in the defence and
security sector, progress can be a double-edged sword providing an asymmetric
advantage to potential opponents; however, the first emerging applications of nano-
robotics are mainly in the healthcare field optimizing the delivery of pharmaceutical
products, a dual-use application.
Nano-robotics is a promising field at the crossroads of both technologies explored in this
report with significant applications in the defence and security sector and in particular for
the soldier. Bio-nano-robotics, inspired by nature, could result in biological molecular
97 Cf. (Bromberg, et al., 2008)

RICERCA AH-R-04 50
machines that make biological structures, such as proteins, act as motors, joints, sensors,
etc., and if assembled together may become nano-devices able to apply forces and
manipulate objects at the nanoscale98. Nano-robotics can be enabled by nano-sensors
and nano-electronics resulting in microscopic ISR systems that can be deployed by
soldiers in the field or air dropped behind enemy lines. Nano-biochips can also be
developed to control flying insects outfitted with sensors, this would allow operators to
steer the insects through the rubble of an earthquake and send back signals when they
found survivors. Mind-controlled mice could also be used to detect explosives or land-
mines. Nano-robotics could be used to accelerate healing or control pain levels in
wounded soldiers. The field of nano-robotics, though at its early stages, promises to
provide game-changing applications for the soldier and the defence enterprise in their
military and civilian roles and Italian industry, research centres, and academia are in a
favourable position to research, develop, and transition these technologies99,100.
C. Strategies for integrating advanced technologies
The Italian soldier and the defence enterprise at large can reap great benefits from
innovation in robotics and nanotechnology through focalized R&D investments that
minimize risks by envisioning carefully thought technology transfer strategies. Italy has
supported the development of research centres that execute basic and applied research in
nanotechnologies while it participates in EU initiatives in robotics R&D. Moreover, Italian
industrial enterprises are able to exploit the results of R&D and develop advanced
technologies for military and civilian uses101.
At the national level, investments into military R&D and the soldier provide direct returns to
the civilian sector by accelerating the adoption of advanced technologies and identifying
applications beyond the original CONOPS. Therefore, public awareness of the products of
military R&D investment will ensure continued support. The Italian MoD, through its
SGD/DNA, already has multiple tools to steer and focus, as well as finance R&D and
98 Cf. (Ummat, et al., 2004)
99 http://cbn.iit.it/about/scientific-program.html
100 http://www.nano.cnr.it/?mod=men&id=101
101 http://www.otomelara.it/products-services/robotic-systems

RICERCA AH-R-04 51
technology transfer activities. The Italian National Military Research Plan is the principal
mechanism to finance basic and applied research with potential military applications102.
More recently, the SGD/DNA and the CNR signed a framework agreement to ensure
collaboration on topics of common (military and civilian) interest. These tools provide
mechanisms for transitioning technologies developed in the civilian arena into the military
world, leveraging Italian government investments into basic research carried out at
universities and research centres and sponsoring small and medium enterprises to
conduct applied R&D and mature technologies for large production by industrial
enterprises (see Table 7).
Table 7. Conceptual framework for maturing and transitioning military technologies in Italy
Technology Readiness Level (TRL)
103
Activities
Public Sector Private Sector
TRL 1 – 3: From basic principles to analytical proof of concept
The Ministry of Education, Universities and Research (MIUR) funds and conducts basic research through Universities and CNR. SGD/DNA monitors products of basic research and funds some activities with high military potential.
Industry and small and medium enterprises (SME) monitor products of basic research.
TRL 4 – 6: From component validation in laboratory to system demonstration in relevant environment
SGD/DNA provides strategy, policy, and guidance and funds applied R&D for military applications. Defence Test Centres conduct tests and experiments to validate and demonstrate systems and components. MIUR provides guidance and funds applied R&D for civilian applications while CNR conducts civilian R&D and Universities conduct both civilian and military R&D.
Research spin-offs and SME conduct applied R&D for military and civilian applications.
Industrial enterprises monitor advances and conduct some high-TRL activities for further transition.
TRL 7 – 9: From system prototype demonstration in operational environment to successful mission operations
SGD/DNA provides strategy, policy, and guidance and funds development activities for military applications. Defence Test Centres conduct demonstrations in operational environments and operational forces conduct missions with advances systems. MIUR, CNR, and Universities monitor military application of technologies to identify deficiencies that can be improved with new research.
Research spin-offs and SME support industrial enterprises as they produce operational systems while monitoring military operations to identify future R&D opportunities.
102 http://www.difesa.it/SGD-DNA/Staff/Reparti/V/Pagine/LaRicercaInnovazione.aspx
103 Cf. (Assistant Secretary of Defense for Research and Engineering (ASD(R&E)), 2011)

RICERCA AH-R-04 52
The SGD/DNA collaborates in multiple venues at the international level. Participation in the
NATO Science and Technology Organization ensures that the products of Italian basic and
applied R&D support international commitments and guarantee interoperability with allies,
while opening opportunities to researchers to collaborate with allied counterparts and
maintain situational awareness of the state-of-the-art of current and innovative S&T. Italy is
a key EDA Member State and collaborates in several European defence initiatives,
ensuring not only the availability of Italian resources to support European requirements,
but guaranteeing that Italian priorities are addressed in common defence R&D initiatives.
Finally, the SGD/DNA directly supports technological innovation through bilateral
collaboration with partner nations and guarantees that Italy remains at the forefront of S&T
in support of the soldier.
In order to advance soldier capabilities, Italy and its defence enterprise must ensure that
there is support at the grand-strategy level (i.e., legislative and executive, see Figure 4 in
Chapter 2) for advances in robotics and nanotechnology. The same applies at the strategic
level with support from the MoD. The interest in these sectors is not only based on the
requirements for the soldier of the future, but on global trends in R&D investment, where
robotics and autonomous vehicles have been identified as lead aerospace and defence
technology development areas and nanotechnology is a key enabler of other important
fields (e.g., remote sensing, stealth technology, energy-efficient propulsion, laser-based
weapons, chemical/bio-sensors, and sensor networks)104.
At the operational and tactical levels, the MoD, through the SGD/DNA, the Defence
General Staff, and the Army General Staff, must ensure that requirements are identified,
refined, analysed, and communicated properly. The process to define requirements should
include the steps shown in Figure 13. This process is the first step in a well-rounded
approach to develop of robotics and nanotechnology such that they address DOTMLPF
issues from the earliest stages of development.
104 Cf. (Batelle, 2011)

RICERCA AH-R-04 53
Figure 13. Requirements definition process105
Good requirements tend to exhibit all or most of the attributes shown in Figure 14. These
attributes allow requirements to place objectives on technological innovation, but leave
room for the S&T community to provide novel solutions to soldier needs.
Figure 14. Desired requirement attributes106
A comprehensive foundation for the development of state-of-the-art robotics and
nanotechnology is based on a solid and unbiased requirements development in
coordination with technology monitoring activities. This approach also facilitates
discussions on the effects of these advanced technologies on DOTMLPF and the changes
that will be required as they become operational. In fact, advanced robotics technologies
105 https://acc.dau.mil/CommunityBrowser.aspx?id=638340
106 Ibid.
Analyse user requirements
Translate user needs into basic functions
Develop a quantifiable set of performance requirements
Define each function required of system
Define implementation constraints
Necessary Unique Unambiguous, clear
and concise Complete
Consistent Technically feasible,
achievable, or obtainable
Traceable Measurable or
quantifiable
Verifiable (e.g., testable)
Able to be validated Operationally
effective Singular

RICERCA AH-R-04 54
have been life-savers during the last twenty years and soldiers that have operated or
received support from these systems have provided great feedback to steer further
development of advanced systems. The same can be said of nanotechnologies as they
enable additional soldier capabilities.
Robotics and nanotechnology have the potential to reshape the Italian land force while
augmenting its capabilities. Therefore, close oversight of R&D activities from the Italian
defence enterprise ensures awareness of the state-of-the-art to address capability gaps.
Moreover, a constant emphasis on technology transition not only support industrial policies
and domestic enterprises, but also guarantees that Italian soldiers continue to provide
national defence and participate in national contingency operations or support international
commitments counting on the latest technology available.

RICERCA AH-R-04 55
4 CONCLUSIONS
“It is not enough that you should understand about applied
science in order that your work may increase man’s blessings.
Concern for the man himself and his fate must always form the
chief interest of all technical endeavours.”
Albert Einstein107
The world is setting solid footing into the 21st Century with major humanitarian and
international crises surrounding Europe. Even though NATO and EU Member States have
enjoyed relative calm and military superiority during the last 25 years due to the end of the
Cold War, allowing them to invest in advanced technologies, military and otherwise, the
lack of credible threats also triggered reductions in national military spending and Italy was
no exception. However, the recent conflicts in North Africa have produced a tidal wave of
asylum-seekers arriving on Italian shores and are straining the capabilities of the Italian
government and society as they seek to accommodate refugees. The conflicts in the
Middle East have raised the threat of terrorism and are overstretching the Italian Army as it
provides national security and guarantees the safety of the nation’s vast patrimony.
Meanwhile, the conflict in Eastern Europe has brought additional constrains to the Italian
economy as it continues its slow recovery from the Great Recession.
Investments in robotics and nanotechnology R&D offer significant opportunities to
augment the capabilities of Italian soldiers and of the nation at large in similar situations in
the future. Moreover, these investments also help stop the “fuga di cervelli” (brain drain)
and foster a brighter economic future with Italy at the forefront of technological innovation.
107 Speech to students at the California Institute of Technology, in "Einstein Sees Lack in Applying Science",
The New York Times (16 February 1931).
RICERCA AH-R-04 56
Automated robotic systems on land and at sea can provide persistent surveillance and
reduce deployments for the Armed Forces. Nanotechnologies can advance ecological
alternatives to produce energy. Meanwhile nano-robots can help deter terrorist attacks on
national territory. Moreover, the support of the Armed Forces in common national
emergencies such as earthquakes and floods will improve as next-generation autonomous
systems help find and rescue victims while advanced nanotechnologies are used by
doctors to accelerate healing.
Studying the strategy of partner nations, from the national to the laboratory levels, will
provide Italian decision-makers with ideas for quickly overcoming organisational barriers
and quickly providing advanced S&T solutions. Moreover, a close study of the roadmaps
and investments planned and ongoing in leading NATO and EU Member States brings
government stakeholders and their counterparts in industry and academia to propose
sensible solutions adapted to the Italian reality.
The analysis in this report, though not all-inclusive given the magnitude of both the
robotics and nanotechnology fields, provides a broad summary of the current state-of-the-
art and a general assessment on the direction of international R&D investments in these
fields. Italian universities and academia tend to be cognizant of the latest global advances
in robotics and nanotechnology. While the private sector worldwide tends to invest into
low-risk innovation, Italian industry and small businesses fall behind those trends with
conservative investments that minimize risks, but also possible profits from pioneering
innovation. Therefore, investments on medium and long-term robotics and nanotechnology
capabilities can provide the sustained revolution or disruption expected by stakeholders in
the government and otherwise and help place Italy not only at the forefront of basic and
applied R&D, but also at the helm of NATO and EU technological innovation.

RICERCA AH-R-04 57
BIBLIOGRAPHY
Ambrose, R. et al., 2012. Robotics, Tele-Robotics and Autonomous Systems Roadmap,
Washington: National Aeronautics and Space Administration.
Armstrong, B., 2012. The Warrior Capability Sustainment Programme. 15(1).
Assistant Secretary of Defense for Research and Engineering (ASD(R&E)), 2011.
Technology Readiness Assessment (TRA) Guidance, Washington: Department of
Defense.
Batelle, 2011. 2012 Global R&D Funding Forecast, Cleveland: Advantage Business
Media.
Bromberg, Y., Katz, O. & Silberberg, Y., 2008. Ghost imaging with a single detector.
Quantum Physics.
Christensen, C. M., 1997. The innovator's dilemma: when technologies cause great firms
to fail. Boston: Harvard Business School Press.
Defense Advanced Research Projects Agency, n.d. DARPA Robotics Challenge. [Online]
Available at:
http://www.darpa.mil/Our_Work/TTO/Programs/DARPA_Robotics_Challenge.aspx
[Accessed 4 June 2014].
Department of Defense, 2009. FY 2009-2034 Unmanned Systems Integrated Roadmap,
Washington: Department of Defense.
Department of Defense, 2013a. Doctrine for the Armed Forces of the United States,
Washington: Department of Defense.
Department of Defense, 2013b. Unmanned Systems Integrated Roadmap: FY2013-2038,
Washington: Department of Defense.
Department of Defense, 2014. DoD Research and Engineering Enterprise, Washington:
Department of Defense.

RICERCA AH-R-04 58
Department of Defense, n.d. Department of Defense (DOD) | Nano. [Online]
Available at: http://www.nano.gov/node/144
[Accessed 4 June 2014].
Department of the Army, Headquarters United States Army Training and Doctrine
Command, Army Capabilities Integration Center, 2009. Robotics Strategy White Paper,
Fort Monroe: Department of the Army.
Donnithorne-Tait, D., 2010. Commercialising Robotic and Unmanned Systems. 13(1).
Effinger, R. C., 2010. The US Army Ground Robotics Strategy: Evolution and Outputs.
13(2), pp. 46 - 49.
Environmental Defense - DuPont Nano Partnership, 2007. Nano Risk Framework,
Washington: Environmental Defense - DuPont Nano Partnership.
euRobotics AISBL, 2014. Robotics 2020 Multi-Annual Roadmap, Brussels: euRobotics
AISBL.
European Commission, 2013. A New Deal for European Defence - Towards a more
competitve and efficient defence and security sector, Brussels: European Commission.
European Defence Agency, 2008. European Defence Research & Technology Strategy,
Brussels: European Defence Agency.
Fioraso, G., 2013. France Europe 2020: A Strategic Agenda for Research, Technology
Transfer and Innovation, Paris: Ministry of Higher Education and Research.
Floyd D. Spence National Defense Authorization Act for Fiscal Year 2001 (2000).
Haider, A., 2014. Remotely Piloted Aircraft Systems in Contested Environments: A
Vulnerabiilty Analysis, Kalkar: Joint Air Power Competence Centre.
Hayward, K., 2010. Unmanned Aerial Systems: a Challenge to European Industry?. 13(1).
HC 11 July 2011 vol 531 col WA48W (2011) House of Commons.
HC Deb 29 November 1944 vol 406 c31 (1944) House of Commons.

RICERCA AH-R-04 59
Hearing on The National Nanotechnology Initiative Amendments Act of 2008 (2008) United
States House of Representatives.
Ibrügger, L., 2005. The Security Implications of Nanotechnology, Brussels: NATO
Parliamentary Assembly.
Il Ministro della Difesa, 2014. Libro bianco per la sicurezza internazionale e la difesa,
Roma: Ministero della Difesa.
Istituto Italiano di Tecnologia, 2012. Strategic Plan 2012 - 2014, Genova: Istituto Italiano di
Tecnologia.
James, A., 2013. Getting the Most out of Open Innovation: The Challenge for Defence.
15(3).
John Warner National Defense Authorization Act for Fiscal Year 2007 (2006).
Joint Chiefs of Staff, 2011. Joint Operations, Washington: Department of Defense.
Killion, T. H. & Bury, S. J., 2010. Leveraging Technology to Empower Our Soldiers. 12(3).
Liddell Hart, B. H., 1967. Strategy. London: Faber.
Manigart, P., 2001. Public opinion and European defense. Brussels, Belgian Royal Military
Academy.
Mazzucato, M., 2014. The entrepreneurial state : debunking public vs. private sector
myths. London: Anthem Press.
Ministero della Difesa, 2014. Documento Programmatico Pluriennale per la Difesa per il
triennio 2014 - 2016, Roma: Ministero della Difesa.
Nano Sciences and Nano Technologies Unit, 2013. Nanotechnology: the invisibile giant
tackling Europe's future challenges, Brussels: European Commission.
O'Donnell, C. C., 2014. Joint Ground Robotics Enterprise. Hyattsville, National Defense
Industrial Association.
RICERCA AH-R-04 60
Office of Naval Research, 2011. Naval S&T Strategic Plan, Arlington: Office of Naval
Research.
Oxford University Press, 2014a. Definition of nanotechnology in English. [Online]
Available at: http://www.oxforddictionaries.com/definition/english/nanotechnology
[Accessed 25 August 2014].
Oxford University Press, 2014b. Definition of robotics in English. [Online]
Available at: http://www.oxforddictionaries.com/definition/english/robotics
[Accessed 25 August 2014].
Oxford University Press, 2014c. Definition of fullerene in English. [Online]
Available at: http://www.oxforddictionaries.com/definition/english/fullerene
[Accessed 5 10 2014].
Panneerselvam, S. & Sangdun, C., 2014. Nanoinformatics: Emerging Databases and
Available Tools. International Journal of Molecular Sciences, 15(5), pp. 7158-7182.
Perlo-Freeman, S. & Solmirano, C., 2014. Trends in world military expenditure, 2013,
Solna: Stockholm International Peace Research Institute.
Roco, M. C., Mirkin, C. A. & Hersam, M. C., 2010. Nanotechnology Research Directions
for Societal Needs in 2020: Retrospective and Outlook, Washington: World Technology
Evaluation Center, Inc..
Science Policy Section, 2004. Nanoscience and nanotechnologies: opportunities and
uncertainties, London: The Royal Society.
Shaffer, A., 2014. Concepts for Change: DoD's 2014 Research and Engineering Strategy,
Washington: Department of Defense.
SPARC The Partnership for Robotics in Europe, 2013. Strategic Research Agenda for
Robotics in Europe, s.l.: SPARC The Partnership for Robotics in Europe.
Stockholm International Peace Research Institute, 2014. The SIPRI Military Expenditure
Database, Solna: Stockholm International Peace Research Institute.
RICERCA AH-R-04 61
Subcommittee on Nanoscale Science, Engineering, and Technology, 2014. National
Nanotechnology Innitiative: Strategic Plan, Washington: National Science and Technology
Council.
The Economist, 2011. Unmanned aerial warfare - Flight of the drones. The Economist
Newspaper Limited, 8 10.
The Economist, 2012. Robots go to war - March of the robots. The Economist Newspaper
Limited, 2 June.
Ummat, A., Sharma, G. & Mavroidis, C., 2004. Bio-Nanorobotics - A Field Inspired by
Nature. In: Y. Bar-Cohen, ed. CRC Handbook on Biomimetics: Mimicking and. s.l.:CRC
Press.
US Army Research Laboratory, 2014. Army Research Laboratory Technical Strategy
2015-2035, Adelphi: US Army Research Laboratory.
von Clausewitz, C., 1993. On War. New York: Random House.
Work, R. O. & Brimley, S., 2014. 20YY: Preparing for War in the Robotic Age, Washington:
Center for a New American Security.
Wright, D., 2012. Automation at Sea. 15(1).
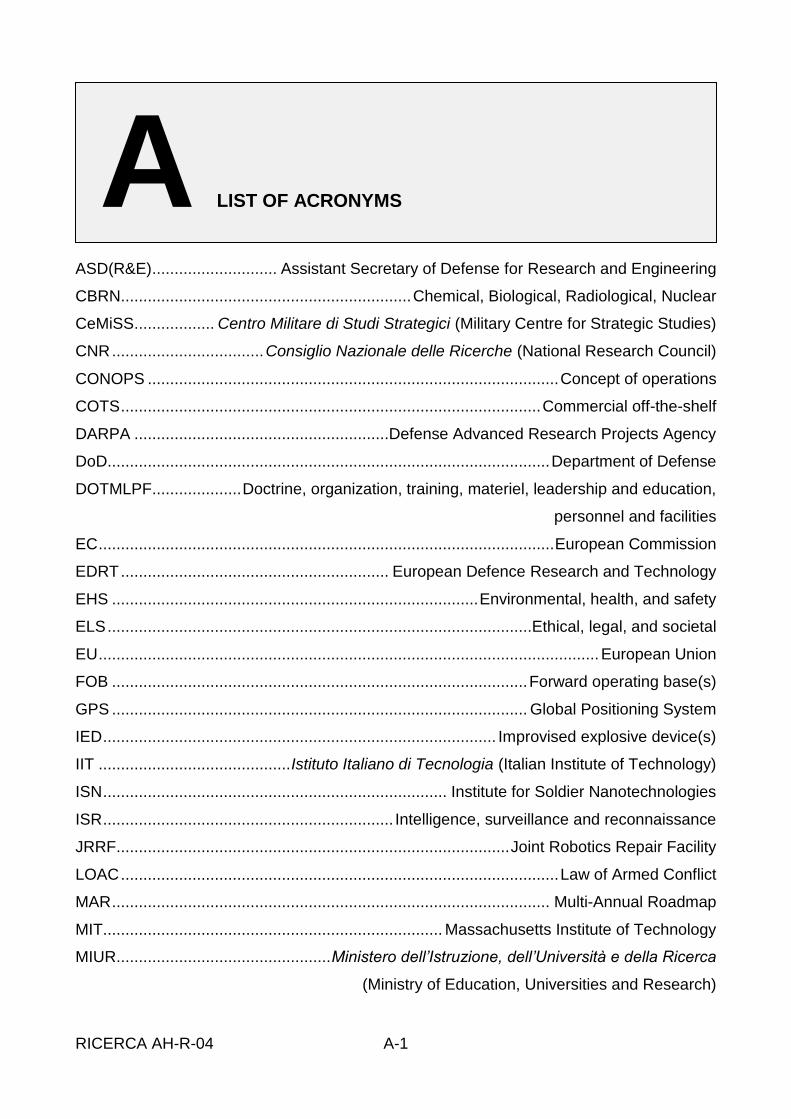
RICERCA AH-R-04 A-1
LIST OF ACRONYMS AASD(R&E) ............................ Assistant Secretary of Defense for Research and Engineering
CBRN ................................................................. Chemical, Biological, Radiological, Nuclear
CeMiSS .................. Centro Militare di Studi Strategici (Military Centre for Strategic Studies)
CNR .................................. Consiglio Nazionale delle Ricerche (National Research Council)
CONOPS ............................................................................................ Concept of operations
COTS .............................................................................................. Commercial off-the-shelf
DARPA .........................................................Defense Advanced Research Projects Agency
DoD................................................................................................... Department of Defense
DOTMLPF .................... Doctrine, organization, training, materiel, leadership and education,
personnel and facilities
EC ...................................................................................................... European Commission
EDRT ............................................................ European Defence Research and Technology
EHS .................................................................................. Environmental, health, and safety
ELS ...............................................................................................Ethical, legal, and societal
EU ................................................................................................................ European Union
FOB ............................................................................................. Forward operating base(s)
GPS ............................................................................................. Global Positioning System
IED ........................................................................................ Improvised explosive device(s)
IIT ........................................... Istituto Italiano di Tecnologia (Italian Institute of Technology)
ISN ............................................................................. Institute for Soldier Nanotechnologies
ISR ................................................................. Intelligence, surveillance and reconnaissance
JRRF........................................................................................ Joint Robotics Repair Facility
LOAC .................................................................................................. Law of Armed Conflict
MAR .................................................................................................. Multi-Annual Roadmap
MIT............................................................................ Massachusetts Institute of Technology
MIUR................................................ Ministero dell’Istruzione, dell’Università e della Ricerca
(Ministry of Education, Universities and Research)

RICERCA AH-R-04 A-2
MoD ........................................................................................................ Ministry of Defence
MRAM ............................................................................ Magnetic Random Access Memory
NANO .............................................................. Istituto Nanoscienze (Nanoscience Institute)
NATO ............................................................................... North Atlantic Treaty Organization
NNI................................................................................... National Nanotechnology Initiative
NSF.......................................................................................... National Science Foundation
OITL ....................................................................................................... Operator-in-the-loop
R&D ........................................................................................... Research and Development
RDT&E ........................................................... Research, Development, Test and Evaluation
S&T ................................................................................................. Science and Technology
SGD/DNA ...........................Segretariato Generale della Difesa e Direzione Nazionale degli
Armamenti (General Secretariat of Defence and National Armaments Directorate)
SME ............ Small and medium-sized enterprises (in Italian Piccole e Medie Imprese, PMI)
SRA ........................................................................................... Strategic Research Agenda
TRADOC ............................................ United States Army Training and Doctrine Command
TRL .......................................................................................... Technology Readiness Level
UAV ........................................................................................... Unmanned aerial vehicle(s)
UGV ......................................................................................... Unmanned ground vehicle(s)
UK ................................................................................................................ United Kingdom
US .................................................................................................. United States of America
USV ........................................................................................ Unmanned surface vehicle(s)
UUV .................................................................................. Unmanned underwater vehicle(s)

RICERCA AH-R-04 B-1
ANALYSIS OF ROBOTIC SYSTEMS ABILITIES BTable B-1. Ability levels and their descriptions
108
Level Description
Mechatronic configuration
0 – Static configuration
The configuration files or mechatronic configuration are set prior to installation and cannot be altered by the user.
1 – Start up configuration
The configuration files or the mechatronic configuration can be altered by the user prior to each task in order to customise the robot system in advance of each cycle of operation.
2 – User runtime configuration
The configuration, both in terms of software operating parameters and mechatronic configuration can be altered by the user during the cycle of operation. For example a robot may have an end effector changed part way through an operating cycle.
3 – Runtime self-configuration
The system can alter its own configuration within a pre-determined set of alternative configurations designed into the system. For example it can change its own end-effectors, or alter configurations based on the set of plug and play modules in use.
4 – Autonomous configuration
The system can alter its own configuration in response to external factors, for example altering its morphology in response to the failure of a sensor or actuator. Note that altering configuration must be carefully distinguished from actions taken as a part of the normal autonomous operation of the robot system.
Adaptability
0 – No adaptation The system does not alter its operating behaviour in response to experience gained over time.
1 – Parameter adaptation
The system alters individual control parameters based on assessments of performance local to the module on which the parameter operates. For example the differential term constant in a PID controller is altered to maintain stability, where stability is measured in relation to the oscillation in the control term.
2 – Multiple parameter adaptation
The system alters several control parameters based on the aggregate performance of a set of interconnected or closely coupled modules. For example the tuning of feature extraction filters over time to optimise performance in the environment.
3 – Process chain adaptation
The processes applied to achieve a function are adapted over time, or over position, to optimise the outputs from a process chain. The adaptation may alter, over time, the weight applied to different processing outputs in a decision making process, or change which alternative or additional processing stages are switched into a process chain as a result of the long term assessment of performance. These adaptations have a degree of permanence with respect to multiple operating cycles and are controlled by long term observations of the behaviour, state or effectiveness of the process outputs.
4 – Task adaptation The task performed during the process cycle is adapted over time to optimise a particular parameter. This adaptation is achieved by strategic overview of the performance of the system while carrying out the task. Adaptation is the result of accumulated experience.
5 – Communicated adaptation
The process of adaptation is carried out between multiple independent agents. The adaptation is communicated between agents and applied individually within in each agent. Agents can be either real or simulated and of different types including non-robotic agents.
Human-robot interaction
0 – No interaction It is possible that some robots will effectively have no operational interaction with a user.
1 – Direct control The user provides control of the robot moment to moment. The system can translate, alter, or block these controls within parameters set by the user or system. The user controls are in the
108 Cf. (euRobotics AISBL, 2014, pp. 74-116)

RICERCA AH-R-04 B-2
Level Description
form of parameters that alter the control of the robot. These parameters may be continuous quantities, for example a steering direction, or binary controls.
2 – Direct physical interaction
The user controls the robot by physically interacting with it. The robot reacts to the user interaction by feeding back physical information to the user via the contact point. For example the user teaches a motion sequence to the robot, or feels the surface of an object the robot is in contact with.
3 – Position selection The system is able to execute predefined actions autonomously. The user selects the subsequent action at the completion of each action. For example a robot is able to move between defined waypoints in its environment, or carry out a fixed action such as releasing an object, as commanded by the user.
4 – Traded autonomy The system is able to operate autonomously during some parts of a task or in some tasks. Once this task or sub-task is complete the user will either select the subsequent task or intervene to control the system by direct interaction to carry out a task. This results in alternating sequences of autonomous and direct control of the system by the user.
5 – Task sequence control
The system is able to execute sub-tasks autonomously; these sub-tasks will involve a higher level of decisional autonomy than the predefined tasks in Level 3. On completion of the sub-task user interaction is required to select the next sub-task resulting in a sequence of actions that make up a completed task.
6 – Supervised autonomy
The robot system is able to execute a task autonomously in most operating conditions. The system is able to recognise when it is unable to proceed or when it requires user input to select alternative strategies or courses of action. These alternatives may involve periods of direct control.
7 – Task selection The system is able to autonomously execute tasks but requires the user to select between strategic task alternatives in order to execute a mission.
8 – Mission goal setting
The system is able to execute tasks to achieve a mission. The user is able to interact with the system to direct the overall objectives of the mission.
Robot-robot interaction
0 – No interaction The robot operates on its own without communication with another robot.
1 – Communication of own status
Two or more robots communicate basic status information and task specific status. Status information is predefined for the task. The information communicated only relates to the state of the robot within the task.
2 – Communication of task status
Two or more robots are able to communicate information about the task they are performing in terms of task completion, time to completion, and information about task barriers, resources etc. This information is at a high level and will impact on the planning of a common task, or tasks in a common space.
3 – Communication of environment information
Two or more robots share information about their local environments, or share wider scale information that they have acquired or been given. The robots are able to assimilate the information and extract task relevant knowledge from it.
4 – Team communication
Two or more robots are able to communicate task level information during execution of the task such that it is possible to implement dynamic planning between the robots in the team. Each robot carries out its own tasks with awareness of the other robots in the team.
5 – Team coordination
Two or more robots are able to collaborate to achieve a task outcome that could not be achieved by either robot alone, or by each robot operating independently.
6 – Capability communication
Robots are able to communicate their own task capabilities and utilise cooperative working between teams of heterogeneous robots where there is no prior knowledge of the composition of the team.
Human-robot interaction safety
0 – Intrinsic safety The mechanism of the robot is safe because by design it cannot exert a force that is damaging to a person at any time during its operating cycle. The maintenance of this level of safety does not depend on software.
1 – Basic safety The robot operates with a basic level of safety appropriate to the task. Maintaining safe operation may depend on the operator being able to stop operation or continuously enable the operating cycle. The maintenance of this level of safety does not depend on software.
2 – Basic operator safety
The robot is made safe for the operator by physically bounding the operating space of the robot. Access gates trigger stop commands to the robot. The robot will not operate unless the bounding space is closed.
3 – User detection The robot is informed when a user enters the work zone. The robot operates in an safe way while the user is present in the operating zone.
4 – Workspace The robot operates within a well-defined space where a zone of safe operation is identified to the

RICERCA AH-R-04 B-3
Level Description
detection operator and programmed into the robot. While the robot is occupying the safe zone it will control its motion such that it is safe. The system may also use sensing to detect that the user does not enter the unsafe zone.
5 – Dynamic user detection
The robot or its support systems detect users within its operating zone and dynamically defines a safe zone that envelopes the user where the robot controls its motion to be safe.
6 – Reactive safety The robot is designed to be safe under all reasonable circumstances such that if it impacts a person the impact forces are minimised below the level that may cause injury during the impact.
7 – Dynamic safety The robot is able to exert strong forces as a part of an interaction task with a user, but recognises when the use of these forces may endanger the user. In this case the robot alters its motion to ensure safe operation.
8 – Context dependent safety
The robot is able to recognise circumstances where it needs to behave in a safe way because it is uncertain about the nature of the environment.
Dependability
0 – No dependability All useful robots are dependable to some degree, even laboratory prototypes. This level exists for completeness.
1 – Mean-failure dependability
The dependability of the robot is based on the mean time to failure of its components. The dependability is based on the design of the robot. The robot is not itself able to increase its dependability. For Failure Dependability this relates to the failure of all component parts of the robot including software components. For Functional dependability this relates to the frequency of failure of the system functions with respect to the task being undertaken, and for environmental dependability it relates to the failure of the robot to correctly interpret the environment, for example falling down a step, or failing to detect a hazard. For Interaction dependability it relates to the failure of the robot to interact with a human in a functional or intuitive manner.
2 – Fails safe The robot design is such that there are fail safe mechanisms built into the system that will halt the operation of the robot and place it into a safe mode when failures are detected. This includes any failures caused by in-field updates. Dependability is reduced to the ability to fail safely in a proportion of failure modes. Fail safe dependability relies on being able to detect failure.
3 – Failure recovery The robot is able to recover from a proportion of failures by restarting or resuming its operation.
4 – Graceful degradation
The robot is able to recognise the impact of a proportion of failures on its function and operation and is able to compensate for the effect of the failure to maintain dependable operation. Function effectiveness or the ability to achieve optimal working may be impacted.
5 – Task dependability
The robot system is able to recognise the impact of a failure on the overall task it is undertaking and re-task activities in order to minimise the impact of the failure on the task. This may also include self-repair as an alternative task.
6 – Mission dependability
The robot is able to recognise the impact of a failure on the overall objectives of a mission and communicate the nature of the failure to other systems and robots to minimise the impact on the mission objectives. In turn the robot is able to receive and interpret mission failures from other robots and systems and re-task its actions to compensate.
7 – Predictive dependability
The robot system is able to predict that a planned future action may result in a loss of dependability, or that the effect of the partial failure of a component can be mitigated by altering future actions. Thus the robot is able to extend its dependability by taking action in advance of failure in order to reduce the effect on dependability.
Motion capability
0 – No motion All robots move in their environments, movement defines a robot. This level exists only for completeness.
1 – Predefined open loop motion
The robot carries out predefined moves in sequence. The motion is independent of the environment and events in the environment. The robot may not be able to maintain a position if subject to external forces, may be able to statically rest at a given position.
2 – Predefined closed loop motion
The robot carries out predefined moves in sequence where each motion is controlled to ensure position and/or speed goals are satisfied within some error bound. So for example a robot can move to and maintain a position (within some error margin) against forces less than the resultant motive force at the point of contact. A platform will similarly be able to execute fixed motions where the accuracy of these motions in the environment will depend on other abilities such as its perception ability.
3 – Open path motion The robot can execute a motion that follows a path with a given path accuracy. This path is described by a specific point on the robot. The robot is able to return to any given point on the path with an accuracy that is appropriate to the task.
4 – Position constrained path
The robot can execute a path motion where the path is constrained by physical objects or by defined zones that must be avoided. For example a robot arm that can operate through a

RICERCA AH-R-04 B-4
Level Description
motion physically constrained region such as a hole in a wall, or a platform that can move to avoid a known area of the environment such as a step down. The robot is able to execute a path to an unvisited location obeying constraints.
5 – Force constrained path motion
The robot can execute a path motion while applying a specified force in a given direction related to the motion. For example moving over the surface of an object while applying a force perpendicular to the surface as might be required when polishing a surface.
6 – Parameterised motion
The robot can execute a path move that optimises for a parameter. For example a path that reduces energy consumption, covers an area, or constrains the angle range of a joint, or the torque or force in a joint or linkage.
7 – Position constrained parameterised motion
The robot can operate through a physically constrained region while at the same time optimising a parameter or set of parameters that constrain the motions of the robot. For example a robot arm may be able to reach a high shelf while maintaining a centre of gravity, or a platform robot operate in a room away from a charging station while optimising power usage.
8 – Compliant motion The robot can execute motions that alter in response to external forces applied to the robot such that the force exerted on the external body is controlled. The robot is able to maintain position and path in the absence of any external force.
9 – Reactive motion The robot is able to react to externally applied forces contacting any part of the robot. The reaction may result in stiffening to resist the force or in lowering stiffness to reduce impact effect. The system is able to apply a force in a given direction and maintain that force against a rigid or semi-rigid body.
10 – Dynamic motion The robot is able to alter its motion strategy in response to multiple external dynamic forces in order to optimise motion parameters. The robot is able to exert a force in a given direction relative to a dynamic body, or within an environmental medium while maintaining position or path.
11 – Soft medium motion
The robot is able to move into and within a soft medium. It is able to maintain a position and path within this medium while optimising motion and force parameters as demanded by the task.
Manipulation ability
0 – No manipulation ability
Many robots will not require the ability to manipulate objects.
1 – Simple pick-and-place
The robot is able to grasp an object at a known predefined location using a predefined grasp action. The robot is then able to move or orient the object and finally un-grasping it. The robot may also use its movement ability to move the object in a particular pattern or to a particular location. Grasping uses open loop control.
2 – Tolerant pick-and-place
The robot is able to grasp an object that is not located at an exact location, may have some orientation variation and is in the general location within the span of the gripper from some known location. Tolerance in the grasp action is able to absorb the difference in location or orientation. The operation is able to compensate for the differences in the picking location without affecting the required placement accuracy.
3 – Variable placement
The robot is able to alter its placement action to accommodate small changes in location of the destination for a picked object. For example it is able to join two parts where the positional tolerance of the mating part is greater than the accuracy needed to place the part correctly.
4 – Compliant placement
The robot is able to use compliance in the placement process to fit a picked part into a statically held part. For example the insertion of one part into another where the insertion forces vary during insertion as a result of friction.
5 – Location unknown pick-and-place
The robot is able to pick up a known object where the location and orientation of the object are not predefined. It is able to orient and align the object (this may be achieved without placement) and then place it within the context of a task.
6 – Generic pick-and-place
The robot is able to pick up an object belonging to a certain parameterised type where the dimensions, location and orientation are unknown. It is able to orient and align the part and place it appropriately in the context of the task.
7 – Object manipulation
The robot is able to pick up and manipulate an object belonging to a certain parameterised type where the object can be articulated, or consists of multiple separate parts. The robot is able to exercise the articulations of the object or disassemble it within the context of a task.
8 – Unknown object manipulation
The robot is able to pick up an unknown object and determine the generic grasping properties of that object. It is able to use those properties to determine how to manipulate and place the object. The robot may be able to categorise the object based on a set of known object types from its manipulation of the object.
Perception ability
0 – No external perception
Some robots do not sense their environment but simply carry out sets of pre-programmed moves triggered by a starting event. Although there may be safety systems that cause the robot to fail
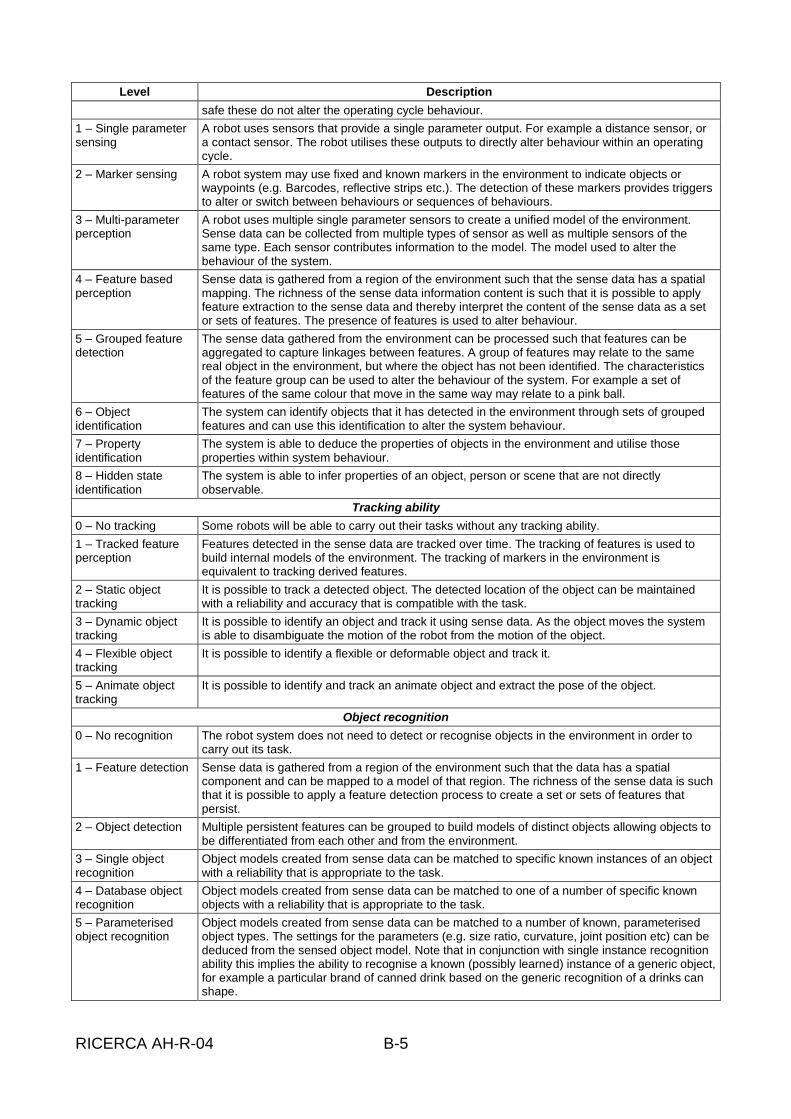
RICERCA AH-R-04 B-5
Level Description
safe these do not alter the operating cycle behaviour.
1 – Single parameter sensing
A robot uses sensors that provide a single parameter output. For example a distance sensor, or a contact sensor. The robot utilises these outputs to directly alter behaviour within an operating cycle.
2 – Marker sensing A robot system may use fixed and known markers in the environment to indicate objects or waypoints (e.g. Barcodes, reflective strips etc.). The detection of these markers provides triggers to alter or switch between behaviours or sequences of behaviours.
3 – Multi-parameter perception
A robot uses multiple single parameter sensors to create a unified model of the environment. Sense data can be collected from multiple types of sensor as well as multiple sensors of the same type. Each sensor contributes information to the model. The model used to alter the behaviour of the system.
4 – Feature based perception
Sense data is gathered from a region of the environment such that the sense data has a spatial mapping. The richness of the sense data information content is such that it is possible to apply feature extraction to the sense data and thereby interpret the content of the sense data as a set or sets of features. The presence of features is used to alter behaviour.
5 – Grouped feature detection
The sense data gathered from the environment can be processed such that features can be aggregated to capture linkages between features. A group of features may relate to the same real object in the environment, but where the object has not been identified. The characteristics of the feature group can be used to alter the behaviour of the system. For example a set of features of the same colour that move in the same way may relate to a pink ball.
6 – Object identification
The system can identify objects that it has detected in the environment through sets of grouped features and can use this identification to alter the system behaviour.
7 – Property identification
The system is able to deduce the properties of objects in the environment and utilise those properties within system behaviour.
8 – Hidden state identification
The system is able to infer properties of an object, person or scene that are not directly observable.
Tracking ability
0 – No tracking Some robots will be able to carry out their tasks without any tracking ability.
1 – Tracked feature perception
Features detected in the sense data are tracked over time. The tracking of features is used to build internal models of the environment. The tracking of markers in the environment is equivalent to tracking derived features.
2 – Static object tracking
It is possible to track a detected object. The detected location of the object can be maintained with a reliability and accuracy that is compatible with the task.
3 – Dynamic object tracking
It is possible to identify an object and track it using sense data. As the object moves the system is able to disambiguate the motion of the robot from the motion of the object.
4 – Flexible object tracking
It is possible to identify a flexible or deformable object and track it.
5 – Animate object tracking
It is possible to identify and track an animate object and extract the pose of the object.
Object recognition
0 – No recognition The robot system does not need to detect or recognise objects in the environment in order to carry out its task.
1 – Feature detection Sense data is gathered from a region of the environment such that the data has a spatial component and can be mapped to a model of that region. The richness of the sense data is such that it is possible to apply a feature detection process to create a set or sets of features that persist.
2 – Object detection Multiple persistent features can be grouped to build models of distinct objects allowing objects to be differentiated from each other and from the environment.
3 – Single object recognition
Object models created from sense data can be matched to specific known instances of an object with a reliability that is appropriate to the task.
4 – Database object recognition
Object models created from sense data can be matched to one of a number of specific known objects with a reliability that is appropriate to the task.
5 – Parameterised object recognition
Object models created from sense data can be matched to a number of known, parameterised object types. The settings for the parameters (e.g. size ratio, curvature, joint position etc) can be deduced from the sensed object model. Note that in conjunction with single instance recognition ability this implies the ability to recognise a known (possibly learned) instance of a generic object, for example a particular brand of canned drink based on the generic recognition of a drinks can shape.

RICERCA AH-R-04 B-6
Level Description
6 – Context based recognition
The system is able to use its knowledge of context or location to improve its ability to recognise objects by reducing ambiguities through expectations based on location or context.
7 – Novelty recognition
The system is able to recognise novelty in a known object, or parameterised object type. For example a known mug where the handle is missing or broken.
8 – Unknown object categorisation (rigid)
The system is able to assess an unknown rigid object based on sense data and deduce properties that are relevant to the task.
9 – Object property detection
It is possible to use sense data and the derived object model to deduce the properties of an object. For example analysis of the sense data may provide surface texture information, knowledge about deformability, or the content of an object.
10 – Flexible object detection
The system is able to detect the shape and form of objects that are deformable and generate parameterised models of flexible objects. This includes articulated objects and objects with flexible and rigid components.
11 – Flexible object classification
The system is able to classify flexible objects by their properties and parameters. It is able to recognise specific known objects relevant to the task with an appropriate level of reliability.
12 – Animate objects The system is able to detect animate objects and provide a classification appropriate to the task.
13 – Pose estimation The system is able to estimate the pose of an animate object within the environment.
Scene perception
0 – No scene perception
The robot does not need to be able to interpret the environment in order to carry out its task.
1 – Basic feature detection
The robot is able to detect features in the environment that relate to static structures in that environment.
2 – Static structures The robot is able to identify static structures in the environment in a way that is appropriate to the task.
3 – Combined structures
The system is able to provide a consistent interpretation of the static structures in the environment over time. For example it is able to identify the floor, walls and ceiling of a room and apply these as physical constraints to a model.
4 – Multiple object detection
The system is able to delineate multiple objects from the static environment where there may be partially occluded with respect to the sense data gathered. For example it is able to delineate objects on the floor of a room.
5 – Object arrangement detection
The system is able to detect arrangements of objects (e.g., objects in a stack or mixed in a receptacle) and identify the relationships between objects with a success appropriate to the task. For example a chair with books on it and a wine glass on top of the books.
6 – Dynamic object detection
The system is able to detect an object that is moving within a static environment.
Location perception
0 – No perception of location
The robot has no perception of its own location either in terms of its position relative to its environment or with respect to the relative position of its own structure.
1 – Actuator position The robot knows where its own mechanical structures are because of an assessment of the position of each of its actuators. For example a platform can assess its own position based on the amount its wheels have turned.
2 – External beacons The robot knows its own location as a result of information derived from the inspection of external beacons. Beacons may be active or passive and include global beacons such as GPS or other satellite navigation systems.
3 – Feature based location
The system calculates its position within an environment based on the motion of fixed features in the environment. For example by using SLAM to build and maintain a local map.
4 – Mapped location The robot is able to relate its own position to a map that it has been given or that it has acquired. This may be a location within a task relevant space.
5 – Self location The system calculates the position of its own mechanical structures based on indirectly gathered sense data (i.e. Sense data gathered other than from the motion control system). This provides a spatial notion of occupancy.
6 – Object coupled location
The system is able to calculate the position of its own mechanical structures in conjunction with objects it is connected to. For example an object that is being gripped by the robot, or the position of the user in an assistive task.
Decisional autonomy
0 – No autonomy All robots exhibit a degree of autonomy. This level remains for consistency with other abilities.
1 – Basic action A robot that executes a sequence of actions that are unaffected by the environment and makes decisions based on the locations of actuators to proceed to the next action step.
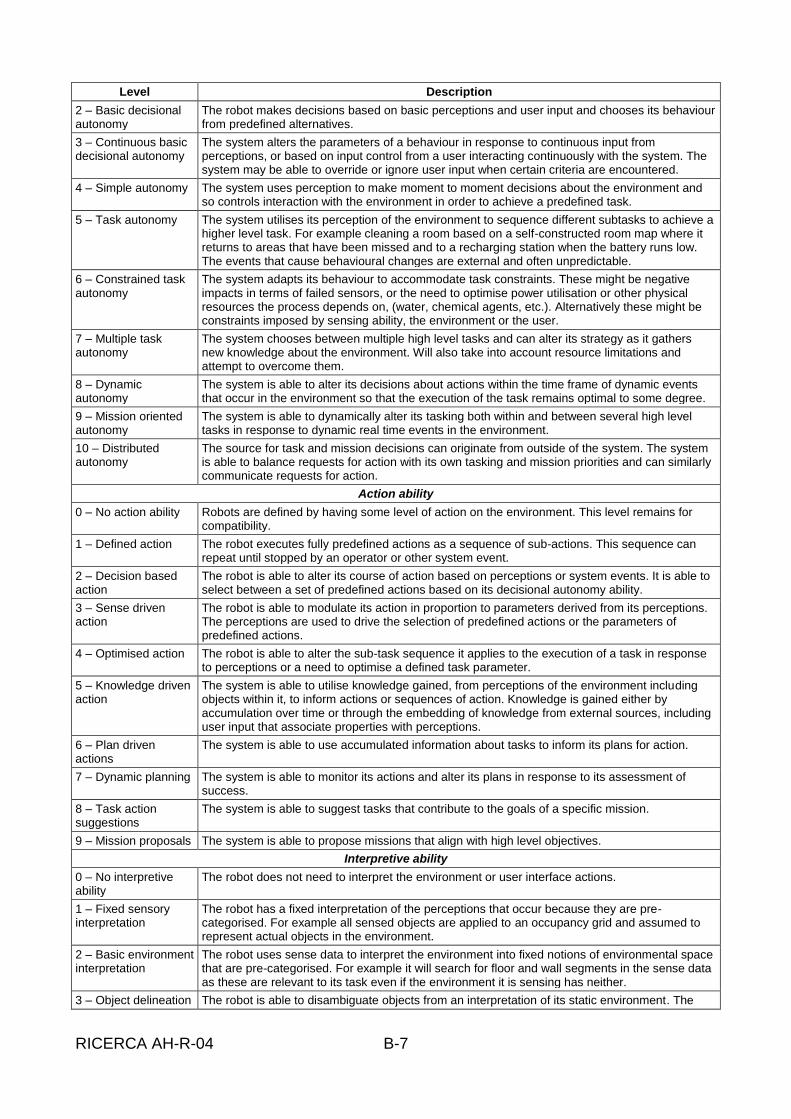
RICERCA AH-R-04 B-7
Level Description
2 – Basic decisional autonomy
The robot makes decisions based on basic perceptions and user input and chooses its behaviour from predefined alternatives.
3 – Continuous basic decisional autonomy
The system alters the parameters of a behaviour in response to continuous input from perceptions, or based on input control from a user interacting continuously with the system. The system may be able to override or ignore user input when certain criteria are encountered.
4 – Simple autonomy The system uses perception to make moment to moment decisions about the environment and so controls interaction with the environment in order to achieve a predefined task.
5 – Task autonomy The system utilises its perception of the environment to sequence different subtasks to achieve a higher level task. For example cleaning a room based on a self-constructed room map where it returns to areas that have been missed and to a recharging station when the battery runs low. The events that cause behavioural changes are external and often unpredictable.
6 – Constrained task autonomy
The system adapts its behaviour to accommodate task constraints. These might be negative impacts in terms of failed sensors, or the need to optimise power utilisation or other physical resources the process depends on, (water, chemical agents, etc.). Alternatively these might be constraints imposed by sensing ability, the environment or the user.
7 – Multiple task autonomy
The system chooses between multiple high level tasks and can alter its strategy as it gathers new knowledge about the environment. Will also take into account resource limitations and attempt to overcome them.
8 – Dynamic autonomy
The system is able to alter its decisions about actions within the time frame of dynamic events that occur in the environment so that the execution of the task remains optimal to some degree.
9 – Mission oriented autonomy
The system is able to dynamically alter its tasking both within and between several high level tasks in response to dynamic real time events in the environment.
10 – Distributed autonomy
The source for task and mission decisions can originate from outside of the system. The system is able to balance requests for action with its own tasking and mission priorities and can similarly communicate requests for action.
Action ability
0 – No action ability Robots are defined by having some level of action on the environment. This level remains for compatibility.
1 – Defined action The robot executes fully predefined actions as a sequence of sub-actions. This sequence can repeat until stopped by an operator or other system event.
2 – Decision based action
The robot is able to alter its course of action based on perceptions or system events. It is able to select between a set of predefined actions based on its decisional autonomy ability.
3 – Sense driven action
The robot is able to modulate its action in proportion to parameters derived from its perceptions. The perceptions are used to drive the selection of predefined actions or the parameters of predefined actions.
4 – Optimised action The robot is able to alter the sub-task sequence it applies to the execution of a task in response to perceptions or a need to optimise a defined task parameter.
5 – Knowledge driven action
The system is able to utilise knowledge gained, from perceptions of the environment including objects within it, to inform actions or sequences of action. Knowledge is gained either by accumulation over time or through the embedding of knowledge from external sources, including user input that associate properties with perceptions.
6 – Plan driven actions
The system is able to use accumulated information about tasks to inform its plans for action.
7 – Dynamic planning The system is able to monitor its actions and alter its plans in response to its assessment of success.
8 – Task action suggestions
The system is able to suggest tasks that contribute to the goals of a specific mission.
9 – Mission proposals The system is able to propose missions that align with high level objectives.
Interpretive ability
0 – No interpretive ability
The robot does not need to interpret the environment or user interface actions.
1 – Fixed sensory interpretation
The robot has a fixed interpretation of the perceptions that occur because they are pre-categorised. For example all sensed objects are applied to an occupancy grid and assumed to represent actual objects in the environment.
2 – Basic environment interpretation
The robot uses sense data to interpret the environment into fixed notions of environmental space that are pre-categorised. For example it will search for floor and wall segments in the sense data as these are relevant to its task even if the environment it is sensing has neither.
3 – Object delineation The robot is able to disambiguate objects from an interpretation of its static environment. The

RICERCA AH-R-04 B-8
Level Description
disambiguation of objects is based on built in notions of object and environment. These notions may only be valid within a narrow operating context.
4 – Object category interpretation
The robot is able to interpret the shapes and forms of objects based on categories of objects that are task relevant. It is able to interpret sense data to identify coherent instances of an object over a time scale appropriate to the task. Note that this ability level is particularly affected by the Cognition Ability Parameters.
5 – Structural interpretation
The robot is able to interpret perceptions so as to extract structural information from the environment. It is able to identify the structural relationships between objects in the environment.
6 – Basic semantic interpretation
The robot is able to apply semantic tags to locations and objects allowing it to plan actions based on functional objectives that depend on the semantics of objects and locations.
7 – Property interpretation
The robot is able to interpret perceptions to determine the properties of objects or locations in the environment.
8 – Novelty interpretation
The robot is able to interpret perceptions to identify novelty in objects or locations.
9 – Environmental affordance
The robot is able to interpret the environment in terms of what it affords. For example it is able to interpret the ground conditions in a muddy field as being too unstable for the load it is carrying.
Envisioning ability
0 – No envisioning ability
The robot is not able to predict subsequent states.
1 – Motion prediction The robot is able to project the effect of its motion to predict short term local interactions with detected objects in the environment. The robot only has the ability to predict its motion with respect to static objects.
2 – Dynamic motion prediction
The robot is able to project the effect of its motion to predict short term interactions with both static and dynamic objects in the environment that the system can detect.
3 – Function projection
The system is able to project the effect of its function onto the local environment in order to be able to assess its effectiveness. For example a robot may assess the coverage of a room it has cleaned in order to identify areas it has missed.
4 – Rigid interaction prediction
The system is able to envision the effect of its planned actions on rigid objects and structures that it has identified. For example it is able to predict how an object will behave when grasped in a particular way.
5 – Flexible object interaction
The system is able to envision the effect its planned actions will have on flexible objects that it has parameterised.
6 – Basic environment envisioning
The system is able to observe events in the environment that relate to the task and envision their impact on the actions of the robot.
7 – Envisioning safety The system is able to assess the safety implications on users of observed events occurring in the working environment.
8 – Envisioning user responses
The system is able to envision the actions of a user responding to events in the environment.
Acquired knowledge
0 – No acquired knowledge
The robot does not acquire knowledge during its operation. Required knowledge is embedded in the system.
1 – Sense data knowledge
The system is able to acquire knowledge about its environment based on sense data gathered moment to moment.
2 – Persistent sense data knowledge
The system is able to accumulate knowledge about its environment based on sense data that persists during the execution of the current task.
3 – Property knowledge
The system is able to acquire knowledge about the properties of objects in the environment by observation.
4 – Deliberate acquisition
The system is able to acquire knowledge about the composition of its operating environment by executing actions that are deliberately designed to increase knowledge through exploration. For example to determine if a cup is full of liquid.
5 – Place knowledge The system is able to accumulate knowledge about the location and types of objects and environmental features in terms of matching objects to predefined and known types.
6 – Knowledge scaffolding
The system has the ability to integrate embedded knowledge of objects and places with related knowledge gained from the environment.
7 – Requested knowledge
The system is able to recognise that it has insufficient knowledge about an object or place relevant to the task and can formulate a question to gain that knowledge either from a person, or an external data source such as the internet or another robot.
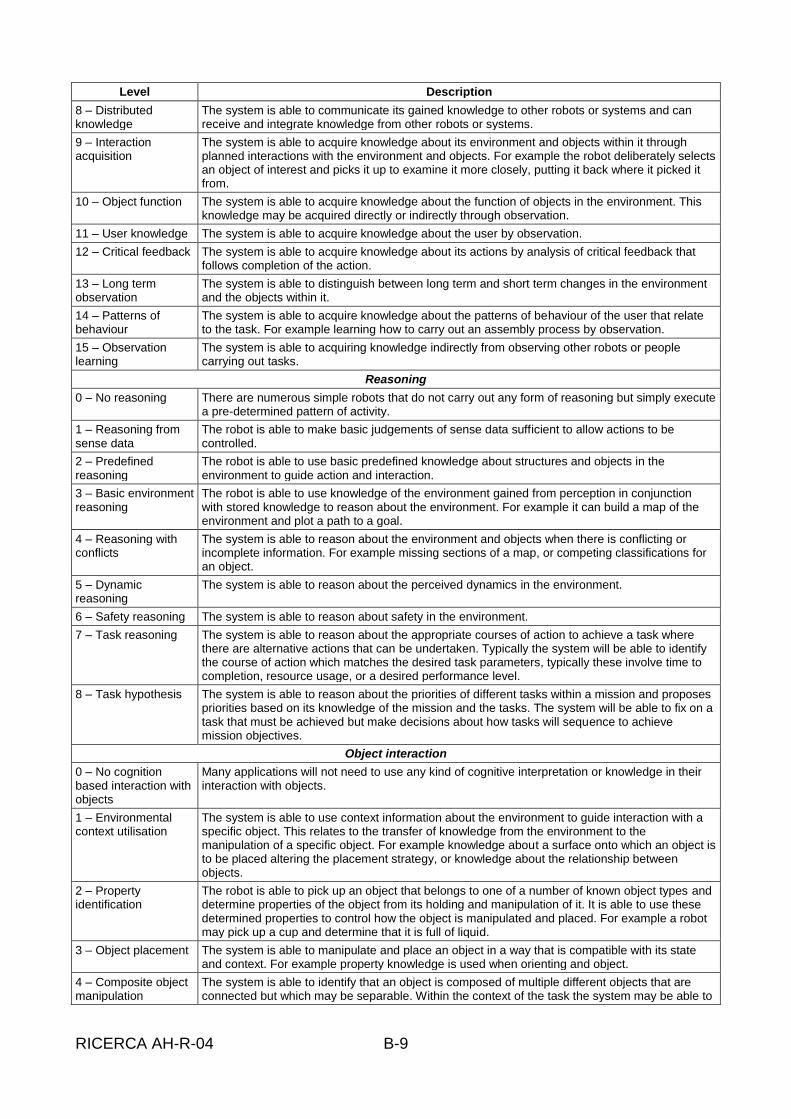
RICERCA AH-R-04 B-9
Level Description
8 – Distributed knowledge
The system is able to communicate its gained knowledge to other robots or systems and can receive and integrate knowledge from other robots or systems.
9 – Interaction acquisition
The system is able to acquire knowledge about its environment and objects within it through planned interactions with the environment and objects. For example the robot deliberately selects an object of interest and picks it up to examine it more closely, putting it back where it picked it from.
10 – Object function The system is able to acquire knowledge about the function of objects in the environment. This knowledge may be acquired directly or indirectly through observation.
11 – User knowledge The system is able to acquire knowledge about the user by observation.
12 – Critical feedback The system is able to acquire knowledge about its actions by analysis of critical feedback that follows completion of the action.
13 – Long term observation
The system is able to distinguish between long term and short term changes in the environment and the objects within it.
14 – Patterns of behaviour
The system is able to acquire knowledge about the patterns of behaviour of the user that relate to the task. For example learning how to carry out an assembly process by observation.
15 – Observation learning
The system is able to acquiring knowledge indirectly from observing other robots or people carrying out tasks.
Reasoning
0 – No reasoning There are numerous simple robots that do not carry out any form of reasoning but simply execute a pre-determined pattern of activity.
1 – Reasoning from sense data
The robot is able to make basic judgements of sense data sufficient to allow actions to be controlled.
2 – Predefined reasoning
The robot is able to use basic predefined knowledge about structures and objects in the environment to guide action and interaction.
3 – Basic environment reasoning
The robot is able to use knowledge of the environment gained from perception in conjunction with stored knowledge to reason about the environment. For example it can build a map of the environment and plot a path to a goal.
4 – Reasoning with conflicts
The system is able to reason about the environment and objects when there is conflicting or incomplete information. For example missing sections of a map, or competing classifications for an object.
5 – Dynamic reasoning
The system is able to reason about the perceived dynamics in the environment.
6 – Safety reasoning The system is able to reason about safety in the environment.
7 – Task reasoning The system is able to reason about the appropriate courses of action to achieve a task where there are alternative actions that can be undertaken. Typically the system will be able to identify the course of action which matches the desired task parameters, typically these involve time to completion, resource usage, or a desired performance level.
8 – Task hypothesis The system is able to reason about the priorities of different tasks within a mission and proposes priorities based on its knowledge of the mission and the tasks. The system will be able to fix on a task that must be achieved but make decisions about how tasks will sequence to achieve mission objectives.
Object interaction
0 – No cognition based interaction with objects
Many applications will not need to use any kind of cognitive interpretation or knowledge in their interaction with objects.
1 – Environmental context utilisation
The system is able to use context information about the environment to guide interaction with a specific object. This relates to the transfer of knowledge from the environment to the manipulation of a specific object. For example knowledge about a surface onto which an object is to be placed altering the placement strategy, or knowledge about the relationship between objects.
2 – Property identification
The robot is able to pick up an object that belongs to one of a number of known object types and determine properties of the object from its holding and manipulation of it. It is able to use these determined properties to control how the object is manipulated and placed. For example a robot may pick up a cup and determine that it is full of liquid.
3 – Object placement The system is able to manipulate and place an object in a way that is compatible with its state and context. For example property knowledge is used when orienting and object.
4 – Composite object manipulation
The system is able to identify that an object is composed of multiple different objects that are connected but which may be separable. Within the context of the task the system may be able to

RICERCA AH-R-04 B-10
Level Description
separate the parts, or exploit the union between them.
5 – Generalised object manipulation
The system is able to interact with an unknown object and as a result of the interaction categorise the object in terms of its categorical relationship to other known or discovered objects. This includes generic categorisations such as “it is a container for liquid”.
6 – Novel object manipulation
Based on contextual and historical knowledge the system is able to establish that an identified object is novel as district from being unknown. Novelty may result from the object being broken or incomplete. For example a known mug is missing a handle or a bottle its cap. The system is then able to manipulate the object taking into account its altered state.
7 – Use of affordances
The system is able to deduce that an object affords an action. The robot is able to grasp an object that has desired affordances within the context of the task or mission and manipulate the object in order to gain use of the afforded action.
Human interaction ability
0 – No cognitive human interaction
Many robot systems will be able to operate successfully without cognitive interaction with the user.
1 – Fixed interaction Interaction between the user and the robot follows a fixed pattern. Typically this takes place via a user interface with well-defined inputs and outputs. Typical of this type of interaction are domestic vacuum cleaning robots which offer simple button interfaces and display a minimum amount of status information. Fixed interaction also includes interaction via a computer based user interface where interactions directly control the robot according to predefined sets of commands with specific meaning. The connection between the user and the robot may involve a wireless link. Any interpretation of commands is fixed and embedded.
2 – Task context interaction
The system is able to interpret commands from the user that utilise task context semantics within a domain specific communication framework appropriate to the range of the task. The system is able to relay task status to the user using task context semantics suitable for the task.
3 – Object and location interaction
The system is able to interpret user interactions that refer to objects, locations or actions in as is appropriate to the task. This includes the ability to interpret user interactions that identify objects locations and actions as well as processing commands that reference locations, objects and actions relevant to the task. Dialogues are initiated by the user.
4 – Robot triggered interaction
The system is able to start a dialogue with the user in a socially appropriate manner relevant to its task or mission. The robot has a basic understanding of the social interaction appropriate to the task/mission domain. Interaction may continue throughout the operating cycle for each task as is appropriate to the task/mission.
5 – Social interaction The system is able to maintain dialogues that cover more than one type of social interaction, or domain task. The robot is able to manage the interaction provided it remains within the defined context of the task or mission.
6 – Complex social interaction
Dialogues cover multiple social interactions and tasks, where the robot is able to instruct the user to carry out tasks, or enter into a negotiation about how a task is specified. The interaction is typified by a bi-directional exchange of commands.
7 – Intuitive interaction
The robot is able to intuit the needs of a user with or without explicit command or dialogue. The user may communicate to the robot without issuing explicit commands. The robot will intuit from the current context and historical information the implied command.

RICERCA AH-R-04 B-11
CENTRO MILITARE DI STUDI STRATEGICI (CEMISS)109
Il Centro Militare di Studi Strategici (CeMiSS) è l’Organismo che gestisce, nell’ambito e per
conto del Ministero della Difesa, la ricerca su temi di carattere strategico.
Costituito nel 1987 con Decreto del Ministro della Difesa, il CeMiSS svolge la propria
opera valendosi su esperti civili e militari, italiani ed esteri, in piena libertà di espressione
di pensiero.
Quanto contenuto negli studi pubblicati riflette quindi esclusivamente l’opinione del
Ricercatore e non quella del Ministero della Difesa.
.
JAIME J. BESTARD
Jaime J. BESTARD is a United States Air Force civilian
engineer assigned to the Technological Innovation
Department of the Italian Secretariat General of Defence and
National Armaments Directorate under the Engineer and
Scientist Exchange Program. Mr. Bestard works in the
Research Strategy, Plans and Programs office, which is
responsible for the management of the Italian military RDT&E
portfolio. Prior to this assignment Mr. Bestard worked as an aerospace survivability expert
at Wright-Patterson Air Force Base, Ohio. Mr. Bestard graduated in 2006 from the
University of Florida with a Master of Science degree in Mechanical Engineering, focusing
on dynamics, systems, and control.
109 http://www.difesa.it/SMD_/CASD/IM/CeMiSS/