location awareness and localization michael allen [email protected] much of this lecture is...
TRANSCRIPT
Location awareness and Location awareness and localizationlocalization
Michael AllenMichael Allen
307CR307CR
[email protected]@coventry.ac.uk
Much of this lecture is based on a 213 guest lecture on localization given at UCLA by Lewis Girod

Location Location awareness/localization?awareness/localization?
Where am I relative to known Where am I relative to known positions?positions? Why would I want to know that?Why would I want to know that?
Where is this unknown thing relative Where is this unknown thing relative to me?to me? Why do I want to know?Why do I want to know?
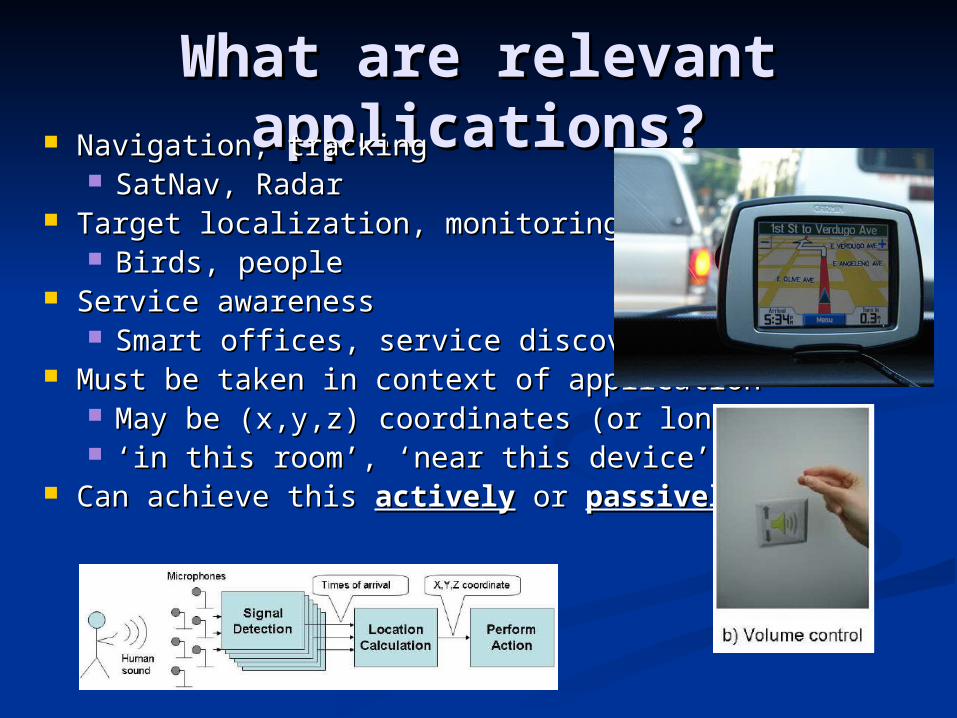
What are relevant What are relevant applications?applications? Navigation, trackingNavigation, tracking
SatNav, RadarSatNav, Radar Target localization, monitoringTarget localization, monitoring
Birds, peopleBirds, people Service awarenessService awareness
Smart offices, service discoverySmart offices, service discovery Must be taken in context of applicationMust be taken in context of application
May be (x,y,z) coordinates (or lon, lat)May be (x,y,z) coordinates (or lon, lat) ‘‘in this room’, ‘near this device’in this room’, ‘near this device’
Can achieve this Can achieve this activelyactively or or passivelypassively

Active MechanismsActive Mechanisms Non-cooperativeNon-cooperative
System emits signal, deduces target System emits signal, deduces target location from distortions in signal location from distortions in signal returnsreturns
e.g. radar and reflective sonar systemse.g. radar and reflective sonar systems Cooperative TargetCooperative Target
Target emits a signal with known Target emits a signal with known characteristics; system deduces location characteristics; system deduces location by detecting signalby detecting signal
e.g. Active Bate.g. Active Bat Cooperative InfrastructureCooperative Infrastructure
Elements of infrastructure emit signals; Elements of infrastructure emit signals; target deduces location from detection target deduces location from detection of signalsof signals
e.g. GPS, MIT Crickete.g. GPS, MIT Cricket

Passive MechanismsPassive Mechanisms Passive Target LocalizationPassive Target Localization
Signals normally emitted by the target Signals normally emitted by the target are detected (e.g. birdcall)are detected (e.g. birdcall)
Several nodes detect candidate events Several nodes detect candidate events and cooperate to localize it by cross-and cooperate to localize it by cross-correlationcorrelation
Passive Self-LocalizationPassive Self-Localization A single node estimates distance to a set A single node estimates distance to a set
of beacons (e.g. 802.11 bases in RADAR)of beacons (e.g. 802.11 bases in RADAR) Blind LocalizationBlind Localization
Passive localization without a priori Passive localization without a priori knowledge of target characteristicsknowledge of target characteristics
Acoustic “blind beamforming” (Yao et al.)Acoustic “blind beamforming” (Yao et al.)
?

Measuring successMeasuring success
Simplest way is distance from ‘ground Simplest way is distance from ‘ground truth’truth’ Euclidean distance from (x,y) estimate to Euclidean distance from (x,y) estimate to
(x,y) truth(x,y) truth Other factorsOther factors
Precision v AccuracyPrecision v Accuracy How accurate does it How accurate does it needneed
to be?to be? ScaleScale Application requirementsApplication requirements
High accuracy, Low precision
Low accuracy, High precision

Measuring success IIMeasuring success II The less control we have over the signals we The less control we have over the signals we
use to estimate position, the less accuracy we use to estimate position, the less accuracy we can getcan get Localizing a bird call is more difficult than acoustic Localizing a bird call is more difficult than acoustic
ToF between two nodesToF between two nodes No synchronisation between un-cooperative targetsNo synchronisation between un-cooperative targets
Even if we control the signals, they may have Even if we control the signals, they may have varying degrees of accuracyvarying degrees of accuracy Signal strength vs acoustic/ultrasonic rangingSignal strength vs acoustic/ultrasonic ranging Environmental problemsEnvironmental problems
Trade-off between cost, application Trade-off between cost, application requirements and environmentrequirements and environment

Ranging mechanismsRanging mechanisms Need some way to determine relative Need some way to determine relative
distances between unknown and known distances between unknown and known positionspositions
Timing the reception of signals that are Timing the reception of signals that are known to propagate at a certain speed are known to propagate at a certain speed are valuablevaluable Audible acousticAudible acoustic UltrasoundUltrasound RadioRadio
Other methods based on inverse relationship Other methods based on inverse relationship between loss and distancebetween loss and distance Received signal strength (RSSI)Received signal strength (RSSI)

Time-of-Flight (ToF)Time-of-Flight (ToF) Send two signals that propagate at different Send two signals that propagate at different
speeds at the same timespeeds at the same time Measure the difference in their arrival time Measure the difference in their arrival time
and use this to estimate distanceand use this to estimate distance Know propagation speeds a prioriKnow propagation speeds a priori Need to be able to detect FIRST onset of signalNeed to be able to detect FIRST onset of signal
ProblemsProblems Non-line of sight, reverb/echoes (multi-path)Non-line of sight, reverb/echoes (multi-path)
RF and acoustics are two common examplesRF and acoustics are two common examples Radio and ultrasoundRadio and ultrasound Radio and audible acousticRadio and audible acoustic

Time-of-Flight (ToF) Time-of-Flight (ToF) ExampleExample
Radio channel is used to synchronize the sender and Radio channel is used to synchronize the sender and receiver receiver
Coded acoustic signal is emitted at the sender and Coded acoustic signal is emitted at the sender and detected at the emitter. ToF determined by comparing detected at the emitter. ToF determined by comparing arrival of RF and acoustic signalsarrival of RF and acoustic signals
CPU
Speaker
Radio
CPU
Microphone
Radio

Multipath/Non line of Multipath/Non line of sightsight
Multipath – when signal bounces off obstacles Multipath – when signal bounces off obstacles in the environmentin the environment Causes signal degradation for direct path Causes signal degradation for direct path
componentcomponent May estimate echoes as actual start of signal = BADMay estimate echoes as actual start of signal = BAD
Non line of sight – when there is no direct path Non line of sight – when there is no direct path between A and Bbetween A and B Distance A-B is now biased by some unknown Distance A-B is now biased by some unknown
constant – making it an over-estimateconstant – making it an over-estimate
A B
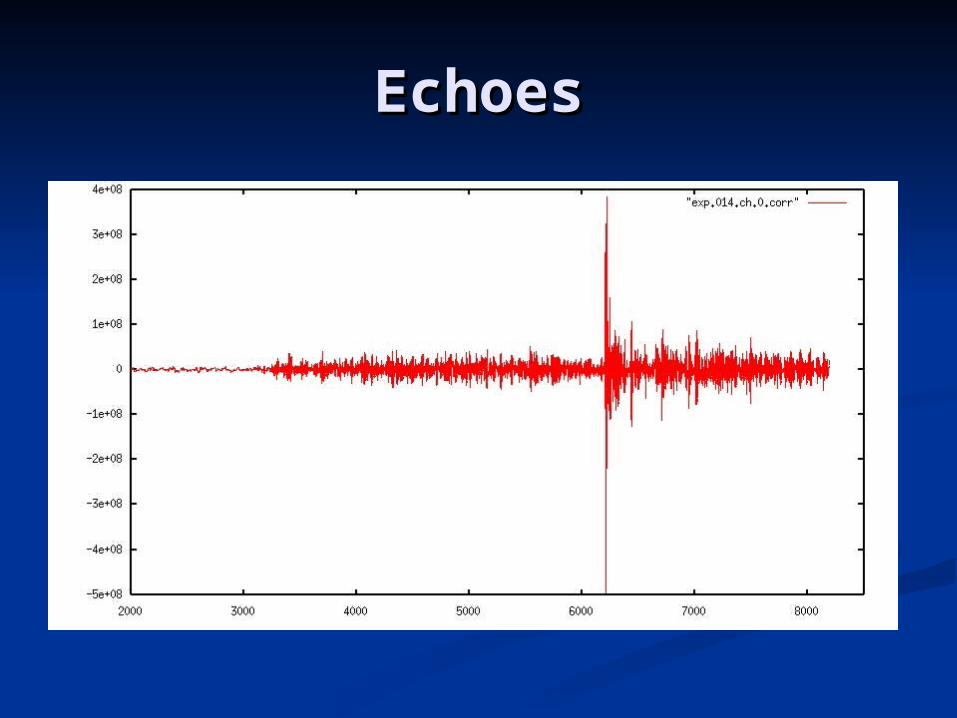
EchoesEchoes

Ultrasonic and Acoustic Ultrasonic and Acoustic ToFToF
Ultrasound better suited to indoor Ultrasound better suited to indoor environments and shorter distances (~10m)environments and shorter distances (~10m) Highly accurate, but highly directionalHighly accurate, but highly directional
Ultrasound less invasiveUltrasound less invasive Consider application constraints..?Consider application constraints..?
Both have multi-path and non-line of sight Both have multi-path and non-line of sight problemsproblems Echoes cause false/late detections (bias result)Echoes cause false/late detections (bias result) If no direction LoS, cannot ever estimate correct If no direction LoS, cannot ever estimate correct
range (not aware that range is incorrect!)range (not aware that range is incorrect!)
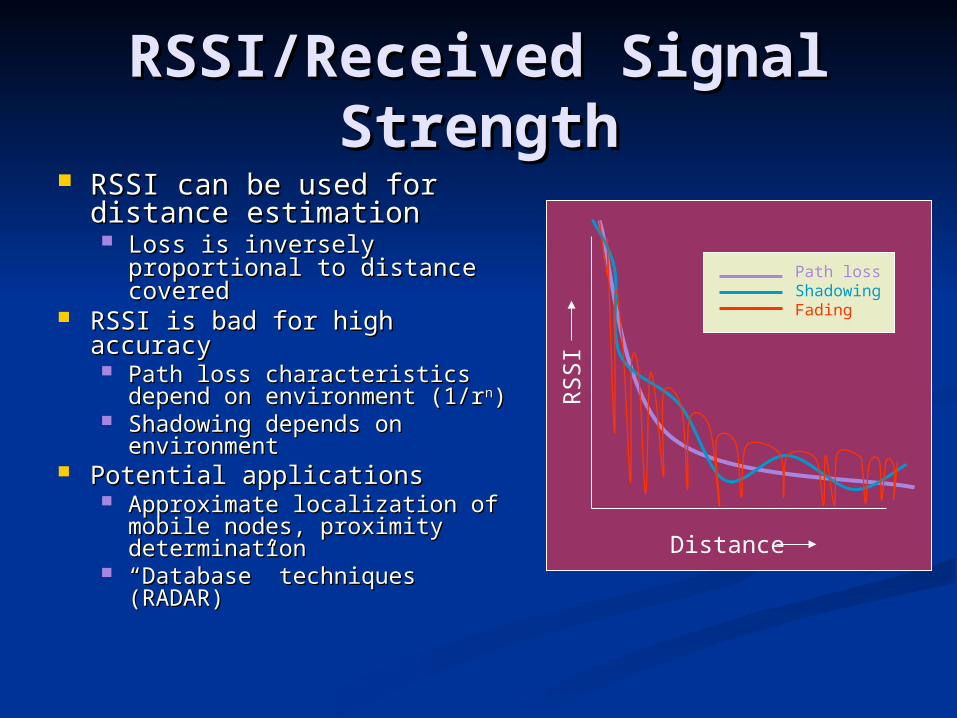
RSSI/Received Signal RSSI/Received Signal StrengthStrength
RSSI can be used for RSSI can be used for distance estimationdistance estimation Loss is inversely Loss is inversely
proportional to distance proportional to distance coveredcovered
RSSI is bad for high accuracyRSSI is bad for high accuracy Path loss characteristics Path loss characteristics
depend on environment (1/rdepend on environment (1/rnn)) Shadowing depends on Shadowing depends on
environmentenvironment Potential applicationsPotential applications
Approximate localization of Approximate localization of mobile nodes, proximity mobile nodes, proximity determinationdetermination
““Database” techniques Database” techniques (RADAR)(RADAR)
DistanceR
SS
I
Path lossShadowingFading

Localization primitives and Localization primitives and examplesexamples
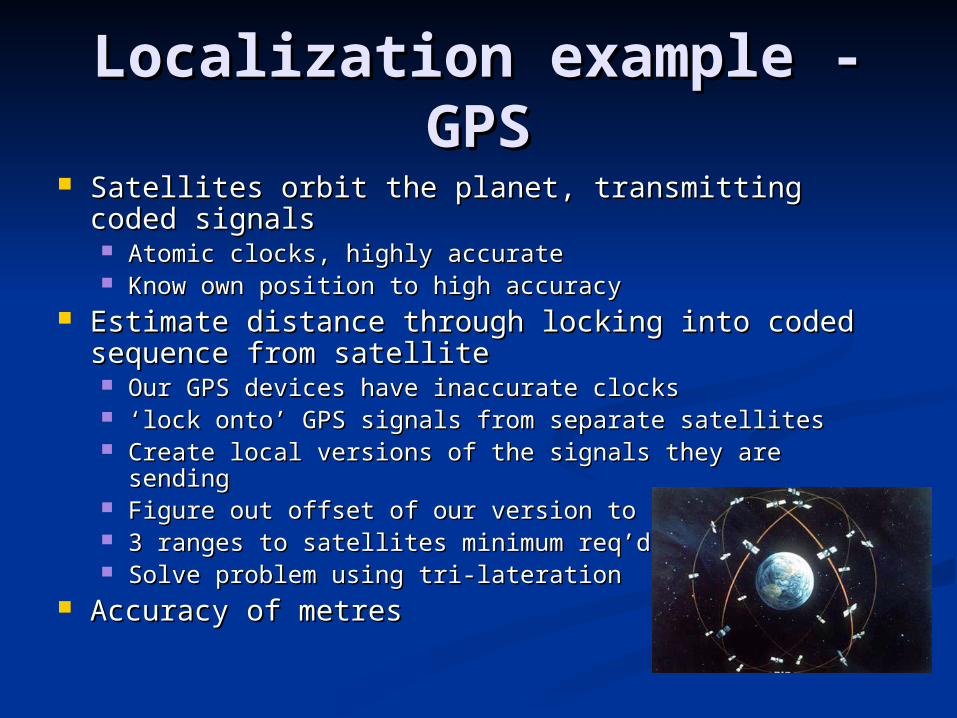
Localization example - Localization example - GPSGPS
Satellites orbit the planet, transmitting coded Satellites orbit the planet, transmitting coded signalssignals Atomic clocks, highly accurateAtomic clocks, highly accurate Know own position to high accuracyKnow own position to high accuracy
Estimate distance through locking into coded Estimate distance through locking into coded sequence from satellitesequence from satellite Our GPS devices have inaccurate clocksOur GPS devices have inaccurate clocks ‘‘lock onto’ GPS signals from separate satelliteslock onto’ GPS signals from separate satellites Create local versions of the signals they are sendingCreate local versions of the signals they are sending Figure out offset of our version to theirs = ToFFigure out offset of our version to theirs = ToF 3 ranges to satellites minimum req’d3 ranges to satellites minimum req’d Solve problem using tri-laterationSolve problem using tri-lateration
Accuracy of metresAccuracy of metres

Tri-lateration/multi-Tri-lateration/multi-laterationlateration
Given several ‘known’ positions, and distances Given several ‘known’ positions, and distances from these to an unknown source, we can from these to an unknown source, we can estimate the position of the unknownestimate the position of the unknown
In 2D this is figuring out the intersection of In 2D this is figuring out the intersection of circles, in 3D is intersection of spheres (slightly circles, in 3D is intersection of spheres (slightly harder)harder) 3 minimum to resolve 2D ambiguity, 4 for 3D3 minimum to resolve 2D ambiguity, 4 for 3D BUT - GPS can get away with 3 – how come?BUT - GPS can get away with 3 – how come?
Important ‘primitive’ inImportant ‘primitive’ inposition estimationposition estimation WSN Localization algorithmsWSN Localization algorithms
often built on top of thisoften built on top of this Multi-lateration is when you useMulti-lateration is when you use
more than 3more than 3 The generalisation for many observationsThe generalisation for many observations
and 3Dand 3D
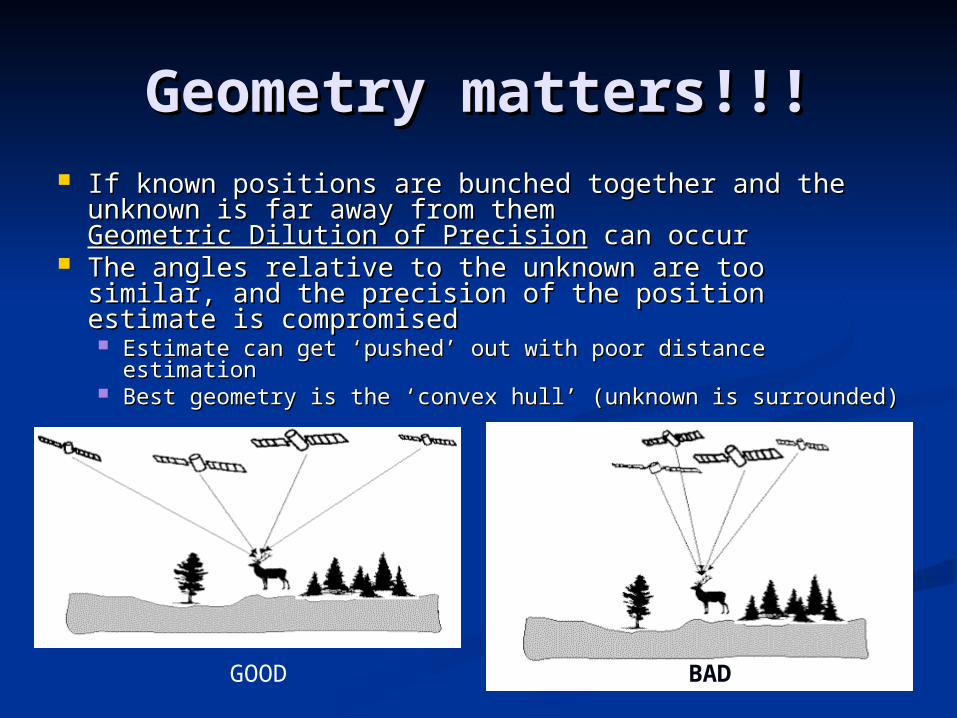
Geometry matters!!!Geometry matters!!! If known positions are bunched together and the If known positions are bunched together and the
unknown is far away from themunknown is far away from themGeometric Dilution of PrecisionGeometric Dilution of Precision can occur can occur
The angles relative to the unknown are too similar, and The angles relative to the unknown are too similar, and the precision of the position estimate is compromisedthe precision of the position estimate is compromised Estimate can get ‘pushed’ out with poor distance estimationEstimate can get ‘pushed’ out with poor distance estimation Best geometry is the ‘convex hull’ (unknown is surrounded)Best geometry is the ‘convex hull’ (unknown is surrounded)
GOOD BAD

Active bats/active badgeActive bats/active badge AT&T Cambridge (as was)AT&T Cambridge (as was) Location systemLocation system
Badge – infrared, room Badge – infrared, room granularitygranularity
Bats – ultrasonic, 3D position Bats – ultrasonic, 3D position within roomwithin room
Uses ultrasonic rangingUses ultrasonic ranging Devices broadcast unique ‘pings’Devices broadcast unique ‘pings’
Trilateration/multilaterationTrilateration/multilateration Can use same ‘cheat’ as GPSCan use same ‘cheat’ as GPS
Ceiling mounted detectorsCeiling mounted detectors Centralised computationCentralised computation
Device doesn’t know Device doesn’t know where it is, system doeswhere it is, system does Badge
Bat
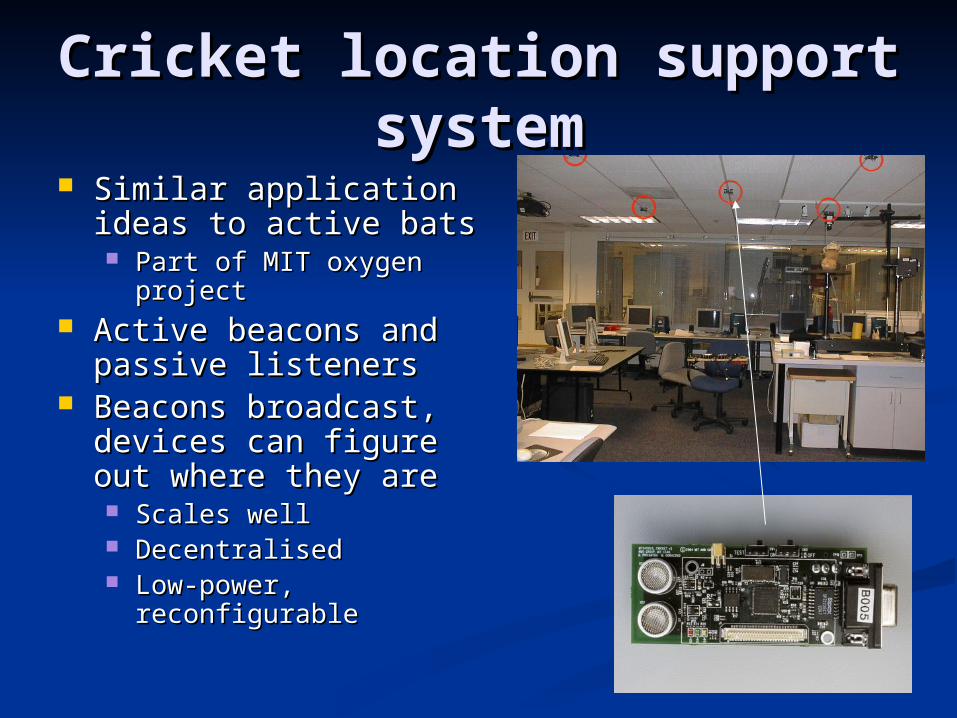
Cricket location support Cricket location support systemsystem
Similar application ideas Similar application ideas to active batsto active bats Part of MIT oxygen projectPart of MIT oxygen project
Active beacons and Active beacons and passive listenerspassive listeners
Beacons broadcast, Beacons broadcast, devices can figure out devices can figure out where they arewhere they are Scales wellScales well DecentralisedDecentralised Low-power, reconfigurableLow-power, reconfigurable

Radar/MicrosoftRadar/Microsoft Uses signal strength (RSSI) to collect Uses signal strength (RSSI) to collect
signature traces of users (with laptops – signature traces of users (with laptops – 802.11)802.11)
These traces can be matched to known RSSI These traces can be matched to known RSSI signatures held in a databasesignatures held in a database
Position can be estimated based on Position can be estimated based on comparisoncomparison Median accuracy 2-3 metres, large varianceMedian accuracy 2-3 metres, large variance
Problems – RSSI is not accurate, estimates Problems – RSSI is not accurate, estimates will vary even when stationary!will vary even when stationary!
Expect best of ~1 – 1.5m accuracyExpect best of ~1 – 1.5m accuracy Is this good enough?Is this good enough?
Motetrack* at Harvard did similar with motesMotetrack* at Harvard did similar with motes
*http://www.eecs.harvard.edu/~konrad/projects/motetrack/
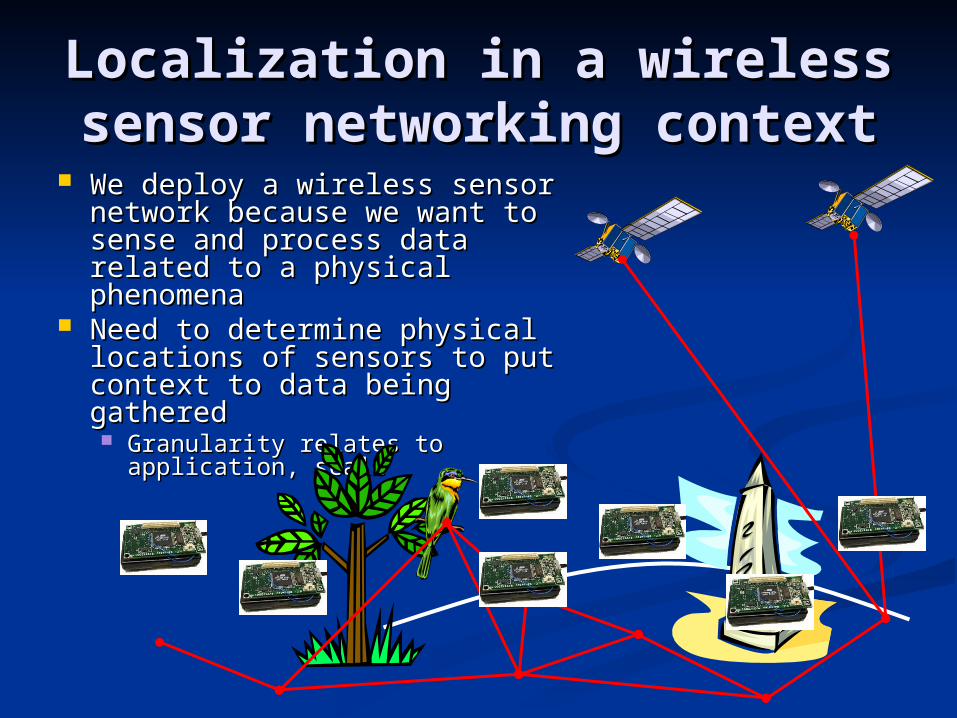
Localization in a wireless Localization in a wireless sensor networking contextsensor networking context
We deploy a wireless sensor We deploy a wireless sensor network because we want to network because we want to sense and process data related sense and process data related to a physical phenomenato a physical phenomena
Need to determine physical Need to determine physical locations of sensors to put locations of sensors to put context to data being gatheredcontext to data being gathered Granularity relates to application, Granularity relates to application,
scalescale
Goals of WSN Goals of WSN localizationlocalization
Minimise the amount of known Minimise the amount of known locations we need a priorilocations we need a priori Can’t just give all nodes GPS.. Can we?Can’t just give all nodes GPS.. Can we?
Estimate ranges as cheaply as possibleEstimate ranges as cheaply as possible Use hardware we already have/need to useUse hardware we already have/need to use
Maximise accuracyMaximise accuracy Relative to our applicationRelative to our application Consider scale, granularityConsider scale, granularity

Multi-hop localizationMulti-hop localization In previous examples, devices have In previous examples, devices have
always been 1 logical hop away from always been 1 logical hop away from known positionsknown positions
Not necessarily the case in wireless Not necessarily the case in wireless sensor networkssensor networks
Need to design algorithms to deal with Need to design algorithms to deal with this problemthis problem Consider error in measurement propagates Consider error in measurement propagates
over multiple hopsover multiple hops Especially bad in large networks, with poor Especially bad in large networks, with poor
ranging techniquesranging techniques
Case study: Acoustic Case study: Acoustic ENSBoxENSBox
Designed for acoustic sensing Designed for acoustic sensing applicationsapplications
Example: localizing animals based Example: localizing animals based on their callson their calls Passive, non-cooperativePassive, non-cooperative
Highly accurate self-localizationHighly accurate self-localization Acoustic ToF ranging and DoAAcoustic ToF ranging and DoA Iterative multi-lateration algorithmIterative multi-lateration algorithm Requires no a priori informationRequires no a priori information
Accuracy is important for Accuracy is important for applicationapplication Using self-localization as ground-truth Using self-localization as ground-truth
for localizing animalsfor localizing animals Nodes have 48KHz sampling, powerful Nodes have 48KHz sampling, powerful
processors, large amount of memoryprocessors, large amount of memory
V2 (2007)

Source-localizationSource-localization
Processing chain:Processing chain: Detect event (we don’t control signal)Detect event (we don’t control signal) Estimate DoA (Problem: cannot rely on Estimate DoA (Problem: cannot rely on
ToF)ToF) Group similar events togetherGroup similar events together Fuse dataFuse data
One node = sub arrayAll nodes = array
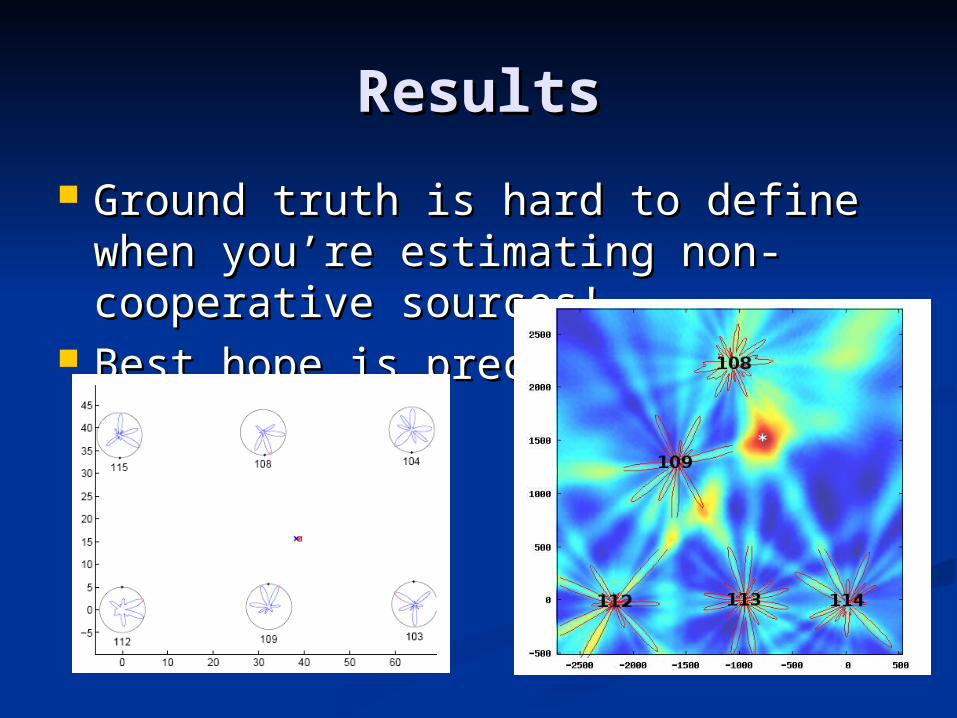
ResultsResults
Ground truth is hard to define when Ground truth is hard to define when you’re estimating non-cooperative you’re estimating non-cooperative sources!sources!
Best hope is precisionBest hope is precision

ConclusionsConclusions Location awareness/localization is importantLocation awareness/localization is important
Considered in Considered in context!!context!! High accuracy can be achieved, dependent High accuracy can be achieved, dependent
on ranging technology, constraints of on ranging technology, constraints of environmentenvironment Need to consider application requirementsNeed to consider application requirements
There are many different ranging approachesThere are many different ranging approaches Approaches vary based on indoor/outdoor, Approaches vary based on indoor/outdoor,
size of devices, cost, goalssize of devices, cost, goals Multi-hop ranging brings other challengesMulti-hop ranging brings other challenges
Propagation of error..Propagation of error..