luiz fernando martha – método das forças – 161 … fernando martha – método das forças –...
TRANSCRIPT

Luiz Fernando Martha – Método das Forças – 161 5.5. Exemplos de solução pelo Método das Forças Exemplo 01 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 1,0 x 105 kNm2.
X1 X1
X2
Sistema Principal e Hiperestáticos (g=2)
M0
Caso (0) – Solicitação externa isolada no SP
X1=1
X1=1
1/6 1/6
1/6
1/6
1/4
1/4
1/4 1/4
M1 . X1
Caso (1) – X1 isolado no SP
X2=1
1/4
M2
1/4
. X2
Caso (2) – X2 isolado no SP
Equações de Compatibilidade
−=+=
⇒
=
+
kNmXkNmX
XX
82.4510.8
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI546361
31691
311
10 −=
⋅⋅⋅−⋅⋅⋅⋅=δ
EIEI3366721
214361
614721
311
20 +=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅⋅=δ
EIEI 320611
312411
3121
11 +=
⋅⋅⋅⋅+⋅⋅⋅⋅⋅=δ
01221 == δδ
EIEI 322611411
311
22 +=
⋅⋅+⋅⋅⋅⋅=δ
Diagrama de Momentos Fletores M = M0 + M1·X1 + M2·X2
M
(kNm)
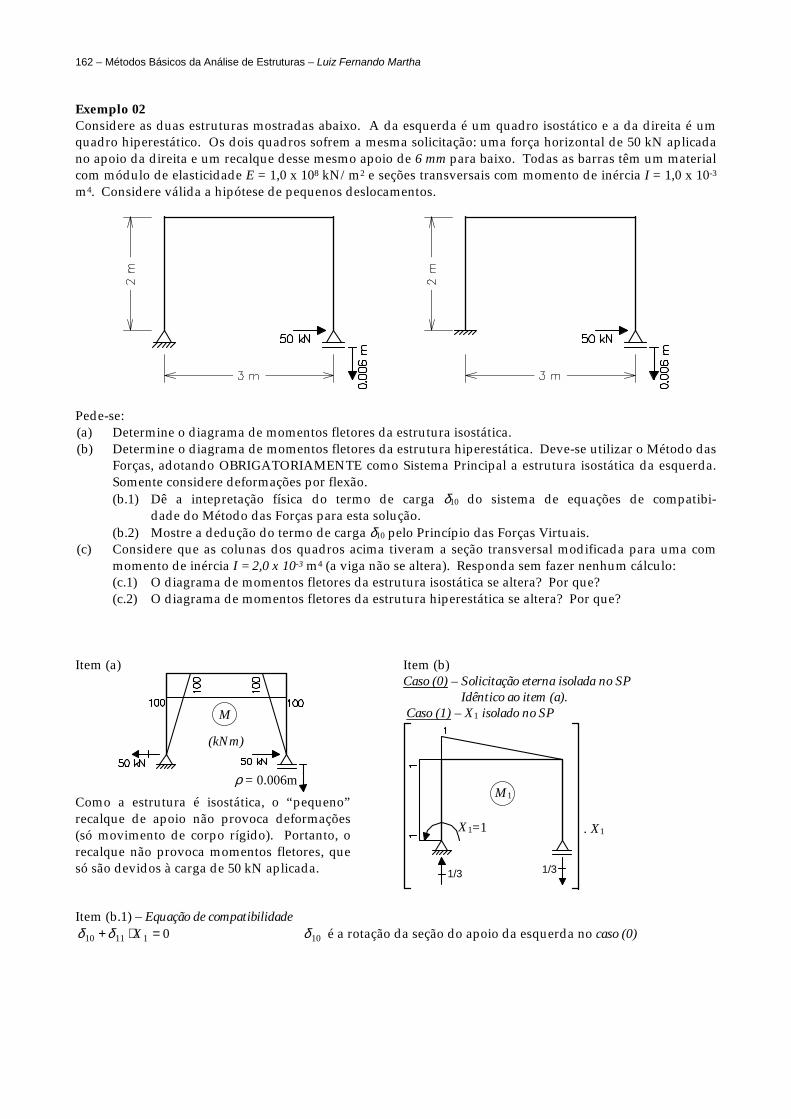
162 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Exemplo 02 Considere as duas estruturas mostradas abaixo. A da esquerda é um quadro isostático e a da direita é um quadro hiperestático. Os dois quadros sofrem a mesma solicitação: uma força horizontal de 50 kN aplicada no apoio da direita e um recalque desse mesmo apoio de 6 mm para baixo. Todas as barras têm um material com módulo de elasticidade E = 1,0 x 108 kN/m2 e seções transversais com momento de inércia I = 1,0 x 10-3 m4. Considere válida a hipótese de pequenos deslocamentos.
Pede-se: (a) Determine o diagrama de momentos fletores da estrutura isostática. (b) Determine o diagrama de momentos fletores da estrutura hiperestática. Deve-se utilizar o Método das
Forças, adotando OBRIGATORIAMENTE como Sistema Principal a estrutura isostática da esquerda. Somente considere deformações por flexão.
(b.1) Dê a intepretação física do termo de carga δ10 do sistema de equações de compatibi- dade do Método das Forças para esta solução.
(b.2) Mostre a dedução do termo de carga δ10 pelo Princípio das Forças Virtuais. (c) Considere que as colunas dos quadros acima tiveram a seção transversal modificada para uma com
momento de inércia I = 2,0 x 10-3 m4 (a viga não se altera). Responda sem fazer nenhum cálculo: (c.1) O diagrama de momentos fletores da estrutura isostática se altera? Por que? (c.2) O diagrama de momentos fletores da estrutura hiperestática se altera? Por que? Item (a)
M
(kNm)
ρ = 0.006m
Como a estrutura é isostática, o “pequeno” recalque de apoio não provoca deformações (só movimento de corpo rígido). Portanto, o recalque não provoca momentos fletores, que só são devidos à carga de 50 kN aplicada.
Item (b) Caso (0) – Solicitação eterna isolada no SP Idêntico ao item (a).
X1=1
1/3
M1
. X1
Caso (1) – X1 isolado no SP
1/3
Item (b.1) – Equação de compatibilidade
011110 =⋅+ Xδδ 10δ é a rotação da seção do apoio da esquerda no caso (0)
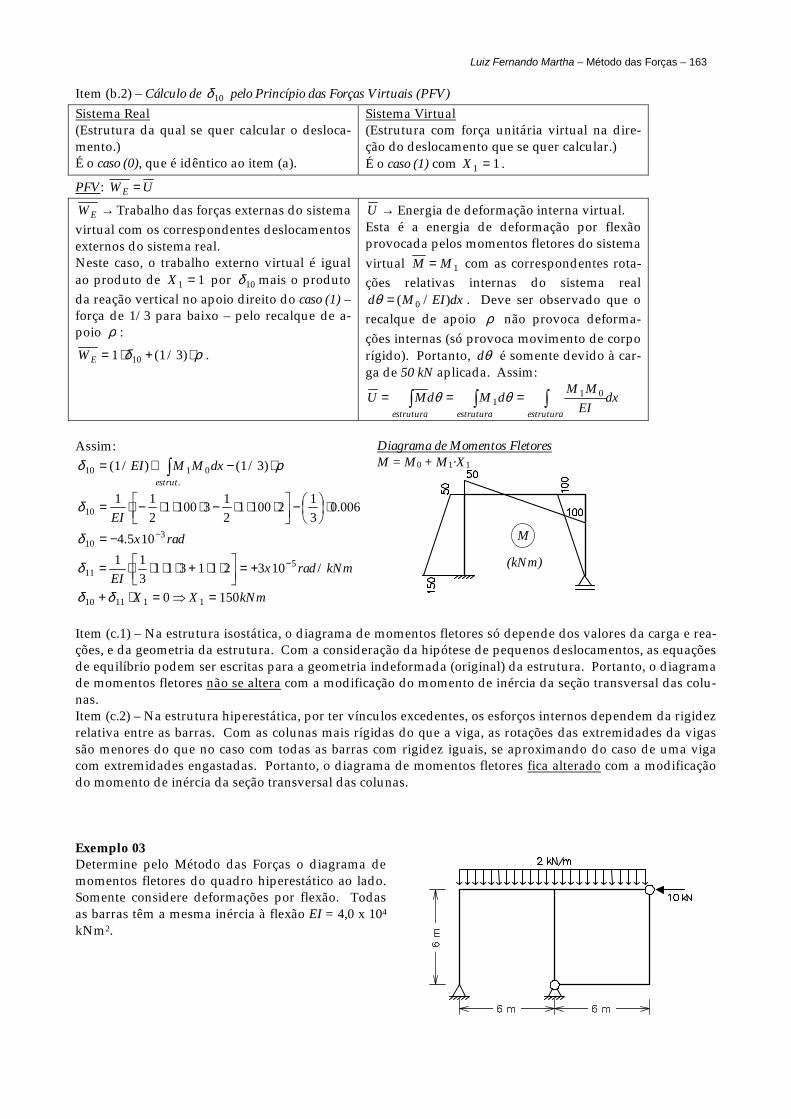
Luiz Fernando Martha – Método das Forças – 163 Item (b.2) – Cálculo de 10δ pelo Princípio das Forças Virtuais (PFV) Sistema Real (Estrutura da qual se quer calcular o desloca-mento.) É o caso (0), que é idêntico ao item (a).
Sistema Virtual (Estrutura com força unitária virtual na dire-ção do deslocamento que se quer calcular.) É o caso (1) com 11 =X .
PFV: UWE =
→EW Trabalho das forças externas do sistema virtual com os correspondentes deslocamentos externos do sistema real. Neste caso, o trabalho externo virtual é igual ao produto de 11 =X por 10δ mais o produto da reação vertical no apoio direito do caso (1) – força de 1/3 para baixo – pelo recalque de a-poio ρ :
ρδ ⋅+⋅= )3/1(1 10EW .
→U Energia de deformação interna virtual. Esta é a energia de deformação por flexão provocada pelos momentos fletores do sistema virtual 1MM = com as correspondentes rota-ções relativas internas do sistema real
dxEIMd )/( 0=θ . Deve ser observado que o recalque de apoio ρ não provoca deforma-ções internas (só provoca movimento de corpo rígido). Portanto, θd é somente devido à car-ga de 50 kN aplicada. Assim:
dxEI
MMdMdMUestruturaestruturaestrutura∫∫∫ === 01
1 θθ
Assim:
ρδ ⋅−⋅= ∫ )3/1()/1(.
0110 dxMMEIestrut
006.03121001
2131001
211
10 ⋅
−
⋅⋅⋅−⋅⋅⋅−⋅=EI
δ
radx 310 105.4 −−=δ
kNmradxEI
/103211311311 5
11−+=
⋅⋅+⋅⋅⋅⋅=δ
kNmXX 1500 111110 =⇒=⋅+δδ
Diagrama de Momentos Fletores M = M0 + M1·X1
M
(kNm)
Item (c.1) – Na estrutura isostática, o diagrama de momentos fletores só depende dos valores da carga e rea-ções, e da geometria da estrutura. Com a consideração da hipótese de pequenos deslocamentos, as equações de equilíbrio podem ser escritas para a geometria indeformada (original) da estrutura. Portanto, o diagrama de momentos fletores não se altera com a modificação do momento de inércia da seção transversal das colu-nas. Item (c.2) – Na estrutura hiperestática, por ter vínculos excedentes, os esforços internos dependem da rigidez relativa entre as barras. Com as colunas mais rígidas do que a viga, as rotações das extremidades da vigas são menores do que no caso com todas as barras com rigidez iguais, se aproximando do caso de uma viga com extremidades engastadas. Portanto, o diagrama de momentos fletores fica alterado com a modificação do momento de inércia da seção transversal das colunas. Exemplo 03 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 4,0 x 104 kNm2.
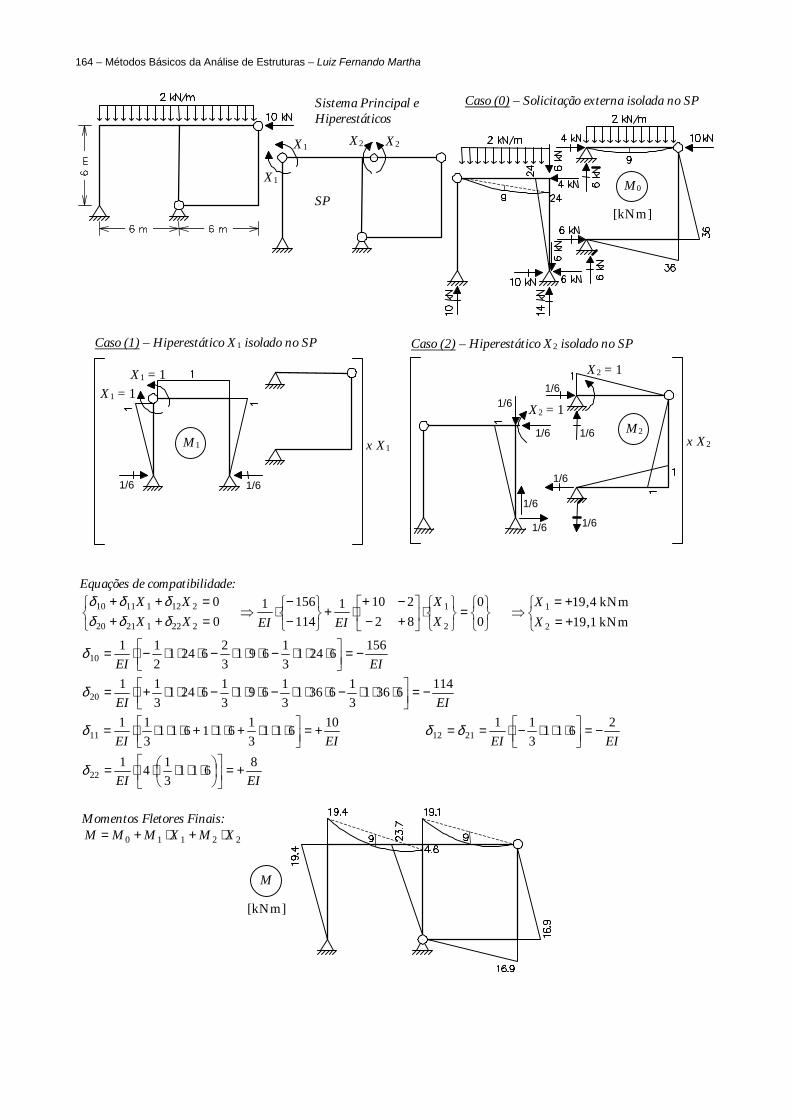
164 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Caso (0) – Solicitação externa isolada no SP
Caso (1) – Hiperestático X1 isolado no SP
M1 x X1
Caso (2) – Hiperestático X2 isolado no SP
x X2
Equações de compatibilidade:
=++=++
00
22212120
21211110
XXXX
δδδδδδ
=
⋅
+−−+
⋅+
−−
⋅⇒00
822101
1141561
2
1
XX
EIEI
+=+=
⇒kNm1,19kNm4,19
2
1
XX
EIEI1566241
31691
326241
211
10 −=
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅=δ
EIEI1146361
316361
31691
316241
311
20 −=
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅⋅⋅+⋅=δ
EIEI10611
31611611
311
11 +=
⋅⋅⋅+⋅⋅+⋅⋅⋅⋅=δ EIEI2611
311
2112 −=
⋅⋅⋅−⋅== δδ
EIEI8611
3141
22 +=
⋅⋅⋅⋅⋅=δ
Momentos Fletores Finais: 22110 XMXMMM ⋅+⋅+=
M2
[kNm]
M0
Sistema Principal eHiperestáticos
SP
X1
X1 X2 X2
X1 = 1 X1 = 1
1/6 1/6
X2 = 1
X2 = 1
1/6
1/6 1/6
1/6
1/6
1/6 1/6
1/6
[kNm]
M
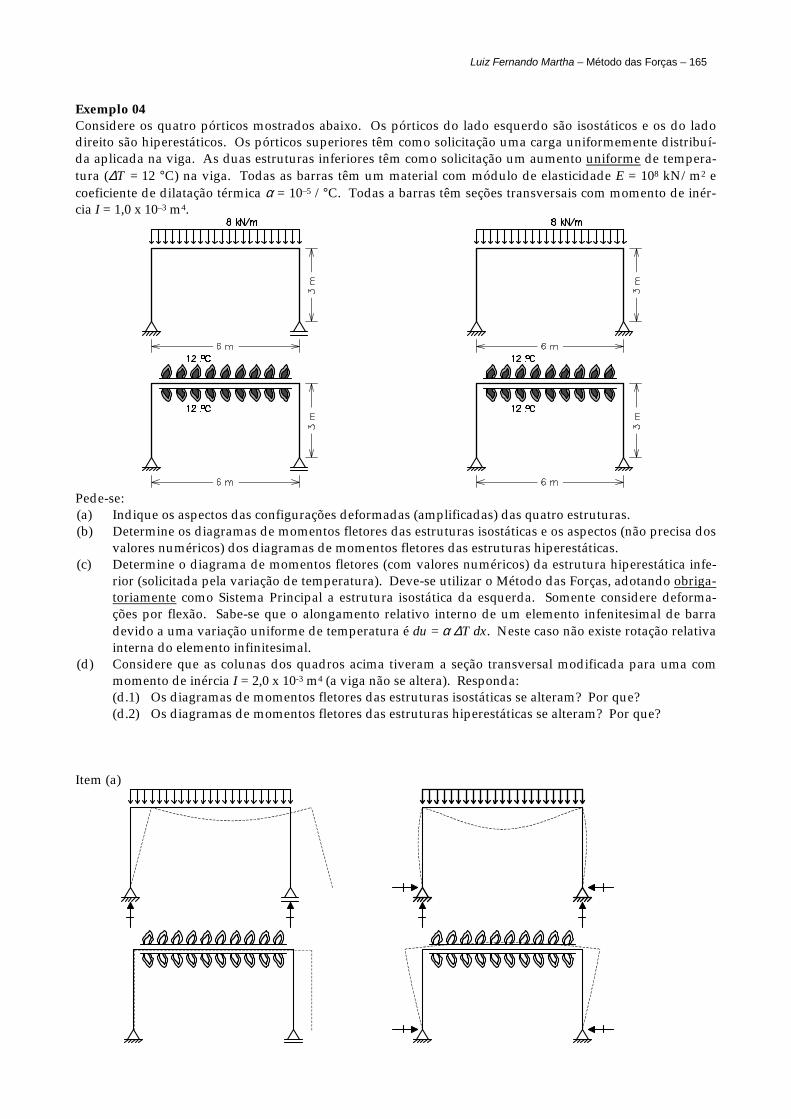
Luiz Fernando Martha – Método das Forças – 165 Exemplo 04 Considere os quatro pórticos mostrados abaixo. Os pórticos do lado esquerdo são isostáticos e os do lado direito são hiperestáticos. Os pórticos superiores têm como solicitação uma carga uniformemente distribuí-da aplicada na viga. As duas estruturas inferiores têm como solicitação um aumento uniforme de tempera-tura (∆T = 12 °C) na viga. Todas as barras têm um material com módulo de elasticidade E = 108 kN/m2 e coeficiente de dilatação térmica α = 10–5 /°C. Todas a barras têm seções transversais com momento de inér-cia I = 1,0 x 10–3 m4.
Pede-se: (a) Indique os aspectos das configurações deformadas (amplificadas) das quatro estruturas. (b) Determine os diagramas de momentos fletores das estruturas isostáticas e os aspectos (não precisa dos
valores numéricos) dos diagramas de momentos fletores das estruturas hiperestáticas. (c) Determine o diagrama de momentos fletores (com valores numéricos) da estrutura hiperestática infe-
rior (solicitada pela variação de temperatura). Deve-se utilizar o Método das Forças, adotando obriga-toriamente como Sistema Principal a estrutura isostática da esquerda. Somente considere deforma-ções por flexão. Sabe-se que o alongamento relativo interno de um elemento infenitesimal de barra devido a uma variação uniforme de temperatura é du = α ∆T dx. Neste caso não existe rotação relativa interna do elemento infinitesimal.
(d) Considere que as colunas dos quadros acima tiveram a seção transversal modificada para uma com momento de inércia I = 2,0 x 10-3 m4 (a viga não se altera). Responda:
(d.1) Os diagramas de momentos fletores das estruturas isostáticas se alteram? Por que? (d.2) Os diagramas de momentos fletores das estruturas hiperestáticas se alteram? Por que? Item (a)
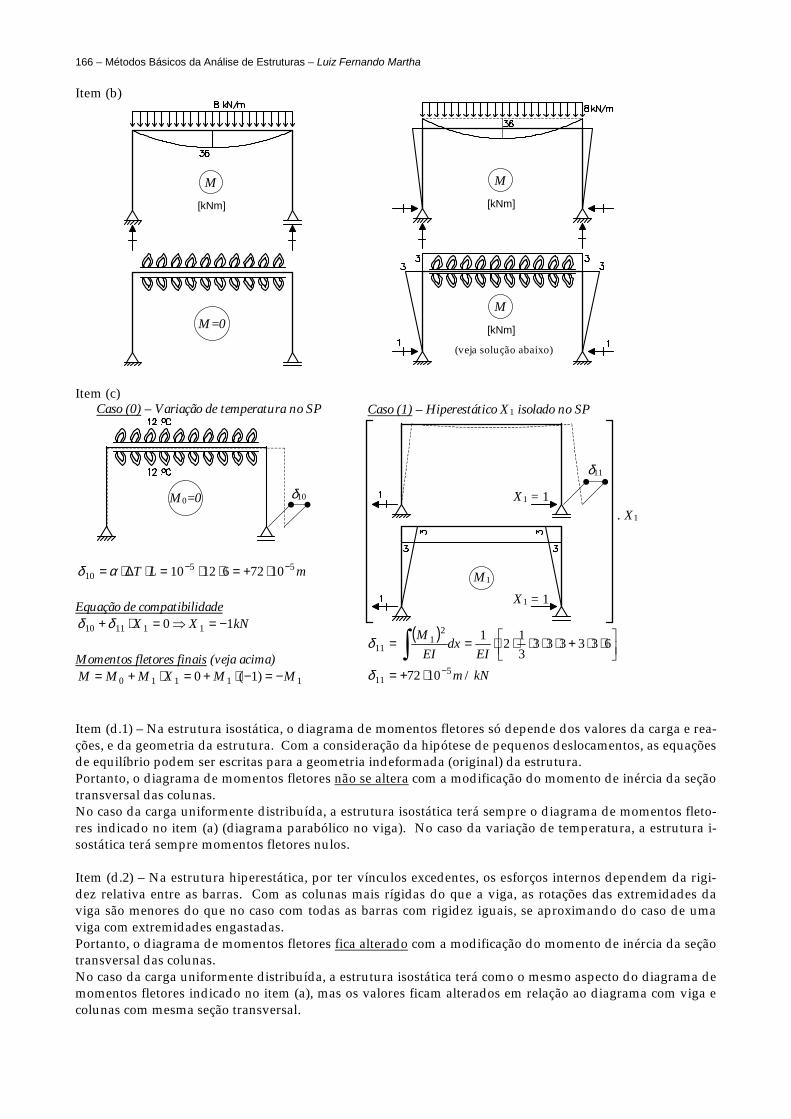
166 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Item (b)
M [kNm]
M[kNm]
M=0
M
[kNm]
(veja solução abaixo)
Item (c)
Caso (0) – Variação de temperatura no SP
δ10 M0=0
mLT 5510 107261210 −− ⋅+=⋅⋅=⋅∆⋅=αδ
Equação de compatibilidade
kNXX 10 111110 −=⇒=⋅+δδ Momentos fletores finais (veja acima)
11110 )1(0 MMXMMM −=−⋅+=⋅+=
X1 = 1
Caso (1) – Hiperestático X1 isolado no SP
M1
. X1
X1 = 1
δ11
( )
⋅⋅+⋅⋅⋅⋅⋅== ∫ 63333331212
111 EI
dxEI
Mδ
kNm/1072 511
−⋅+=δ Item (d.1) – Na estrutura isostática, o diagrama de momentos fletores só depende dos valores da carga e rea-ções, e da geometria da estrutura. Com a consideração da hipótese de pequenos deslocamentos, as equações de equilíbrio podem ser escritas para a geometria indeformada (original) da estrutura. Portanto, o diagrama de momentos fletores não se altera com a modificação do momento de inércia da seção transversal das colunas. No caso da carga uniformente distribuída, a estrutura isostática terá sempre o diagrama de momentos fleto-res indicado no item (a) (diagrama parabólico no viga). No caso da variação de temperatura, a estrutura i-sostática terá sempre momentos fletores nulos. Item (d.2) – Na estrutura hiperestática, por ter vínculos excedentes, os esforços internos dependem da rigi-dez relativa entre as barras. Com as colunas mais rígidas do que a viga, as rotações das extremidades da viga são menores do que no caso com todas as barras com rigidez iguais, se aproximando do caso de uma viga com extremidades engastadas. Portanto, o diagrama de momentos fletores fica alterado com a modificação do momento de inércia da seção transversal das colunas. No caso da carga uniformente distribuída, a estrutura isostática terá como o mesmo aspecto do diagrama de momentos fletores indicado no item (a), mas os valores ficam alterados em relação ao diagrama com viga e colunas com mesma seção transversal.

Luiz Fernando Martha – Método das Forças – 167 A solução da estrutura hiperestática pelo Método das Forças, para a solicitação de variação uniforme de temperatura na viga, demonstra que a os valores dos momentos fletores finais dependem dos valores relati-vos entre momentos de inércia das seções transversais barras: O caso (0) mostrado no item (c) permanece inalterado, isto é:
mLT 5510 107261210 −− ⋅+=⋅⋅=⋅∆⋅=αδ .
O diagrama de momentos fletores M1 do item (c) é o mesmo, mas o valor do coeficiente de flexibilidade fica alterado:
[ ]
⋅⋅⋅⋅⋅+⋅⋅⋅= 33331216331
11colunaviga EIEI
δ
kNm/10631091054 55511
−−− ⋅=⋅+⋅=δ Equação de compatibilidade
kNXX 780 111110 −=⇒=⋅+δδ
Momentos fletores finais ( )7
81110 −⋅=⋅+= MXMMM
M
[kNm]8/7 8/7
24/7
24/7 24/7
24/7
Exemplo 05 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 1,0 x 105 kNm2.
Sistema Principal e Hiperestáticos
(g = 2)
X1
X1 X2 X2
Caso (0) – Solicitação externa isolada no SP
M0
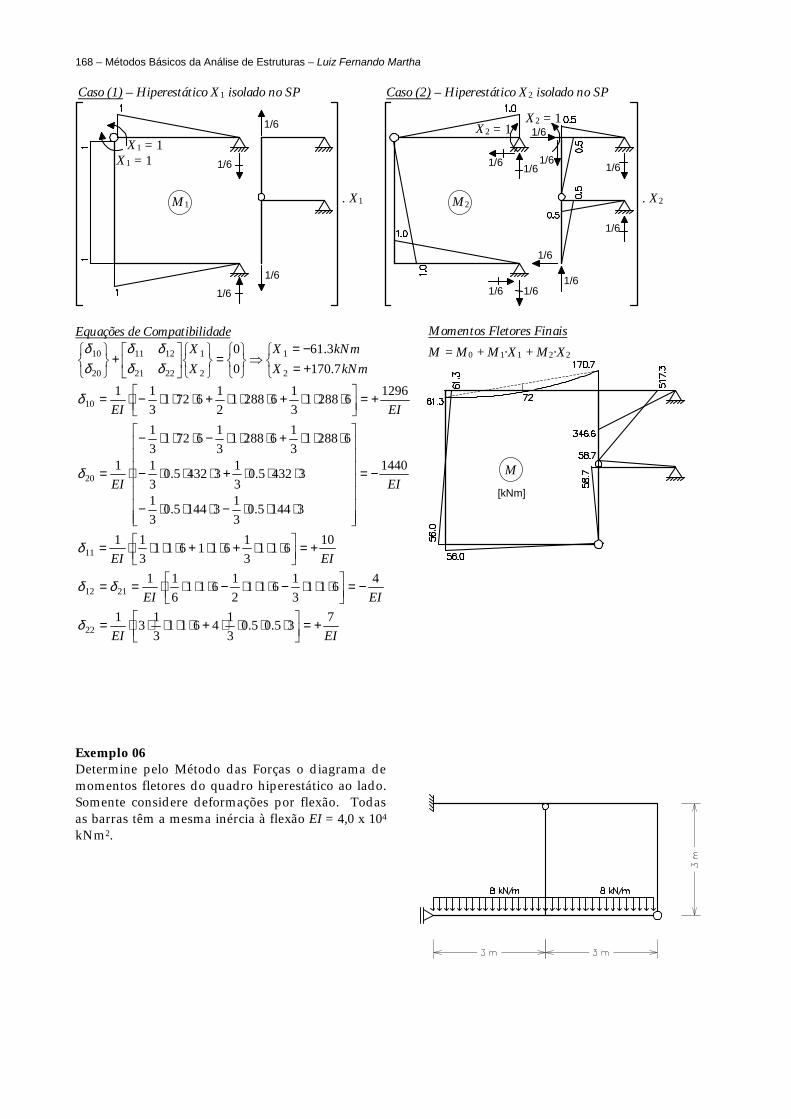
168 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha
X1 = 1 X1 = 1
Caso (1) – Hiperestático X1 isolado no SP
M1
1/6
1/6
1/6
1/6
. X1
X2 = 1
Caso (2) – Hiperestático X2 isolado no SP
M2
1/6
. X2
1/6
1/6 1/6
1/6
1/6
1/6
1/6
1/6
1/6
X2 = 1
Equações de Compatibilidade
+=−=
⇒
=
+
kNmXkNmX
XX
7.1703.61
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI129662881
3162881
216721
311
10 +=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−⋅=δ
EIEI1440
31445.03131445.0
31
34325.03134325.0
31
628813162881
316721
31
120 −=
⋅⋅⋅−⋅⋅⋅−
⋅⋅⋅+⋅⋅⋅−
⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−
⋅=δ
EIEI10611
31611611
311
11 +=
⋅⋅⋅+⋅⋅+⋅⋅⋅⋅=δ
EIEI4611
31611
21611
611
2112 −=
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅⋅== δδ
EIEI735.05.0
314611
3131
22 +=
⋅⋅⋅⋅+⋅⋅⋅⋅⋅=δ
Momentos Fletores Finais
M
M = M0 + M1·X1 + M2·X2
[kNm]
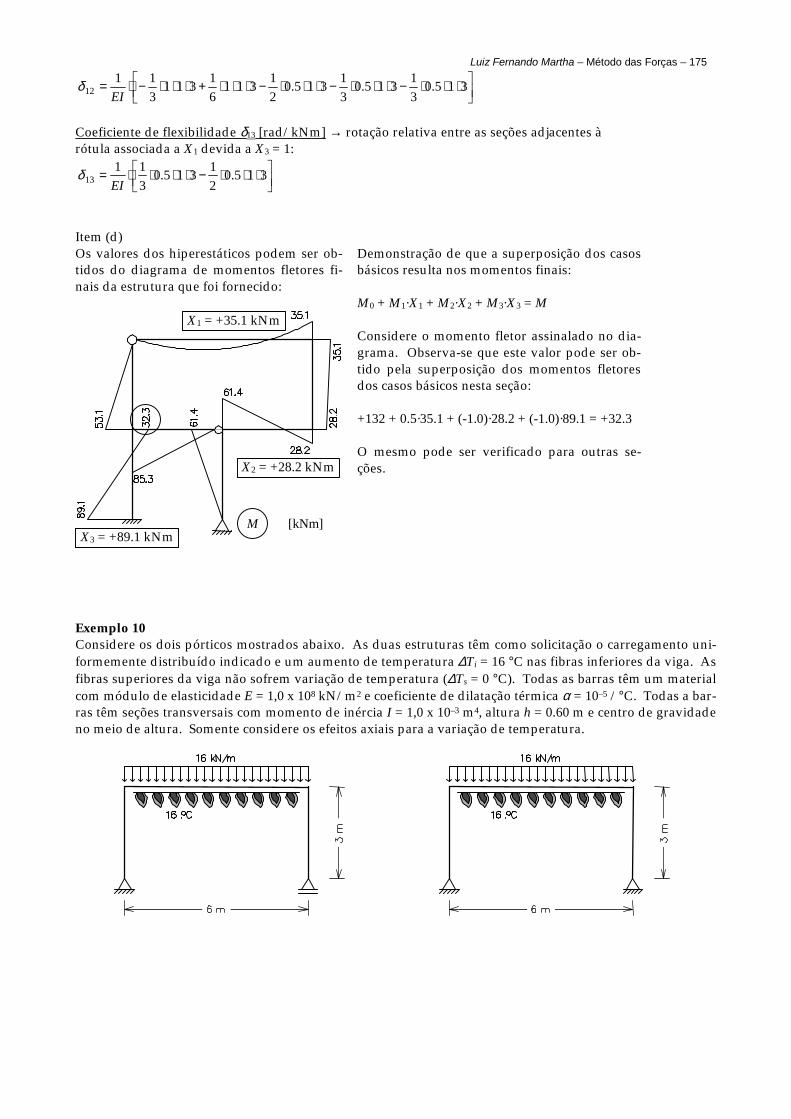
Exemplo 06 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 4,0 x 104 kNm2.

Luiz Fernando Martha – Método das Forças – 169
X1
X1
X2
Sistema Principal e Hiperestáticos (g=2)
X2
Momentos Fletores Finais
M
M = M0 + M1·X1 + M2·X2
[kNm]
Caso (0) – Solicitação externa isolada no SP
M0
X1=1
M1 . X1
Caso (1) – X1 isolado no SP
1/3
1/3
1/3
1/3
1/31/3
X1=1
X2=1
M2. X2
Caso (2) – X2 isolado no SP
1/3
X2=1
1/3 1/3 1/3 1/3 1/3
1/3
1/3 1/3
1/3
Equações de Compatibilidade
−=−=
⇒
=
+
kNmXkNmX
XX
1.525.20
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI3783361
213361
2131801
211
10 +=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅⋅=δ
EIEI405
391313361
31
3361313361
2131801
21
120 +=
⋅⋅⋅+⋅⋅⋅+
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅⋅=δ
EIEI7311
313113111
11 +=
⋅⋅⋅+⋅⋅+⋅⋅⋅=δ
EIEI 29311
213111
2112 +=
⋅⋅⋅+⋅⋅⋅== δδ
EIEI6311
3133111
22 +=
⋅⋅⋅⋅+⋅⋅⋅=δ

170 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Exemplo 07 Para a viga contínua com dois vãos mostrada abaixo pede-se o diagrama de momentos fletores utilizando o Método das Forças. As seguintes solicitações atuam na estrutura concomitantemente: · Uma carga concentrada de 40 kN no centro de cada vão. · Aquecimento das fibras superiores da viga de ∆Ts = 50 °C ao longo de toda a sua extensão (as fibras
inferiores não sofrem variação de temperatura, isto é, ∆Ti = 0 °C). · Recalque vertical (para baixo) de 3 cm do apoio direito.
Sabe-se: (a) A viga tem um material com módulo de elasticidade E = 108 kN/m2 e coeficiente de dilatação térmica
α = 10–5 /°C. (b) A viga tem seção transversal com área A = 1,0 x 10–2 m2 e momento de inércia I = 1,0 x 10–3 m4. A altu-
ra da seção transversal é h = 0,60 m e o seu centro de gravidade fica posicionado na metade da altura. (c) O deslocamento axial relativo interno provocado pela variação de temperatura em um elemento infi-
nitesimal de barra é duT = α ∆TCG dx, sendo ∆TCG a variação de temperatura na fibra do centro de gravidade da seção transversal.
(d) O rotação relativa interna provocada pela variação de temperatura em um elemento infinitesimal de barra é
( ) dxh
TTd siT ∆∆αθ −= .
X1 Sistema Principal e Hiperestático (g=1) X1
Caso (0) – Solicitação externa isolada no SP
M0 [kNm]
Como o Sistema Principal é isostático, a variação de tempe-ratura e o recalque de apoio só provocam deslocamentos (não provocam esforços internos). Portanto, os momentos fletores só são devidos às cargas de 40 kN aplicadas.
X1=1
M1
. X1
Caso (1) – X1 isolado no SP
1/3
X1=1 1/6 1/6
Equação de compatibilidade 011110 =⋅+ Xδδ
10δ é a rotação relativa entre as seções adjacentes à rótula introduzida na cria-ção do Sistema Principal no caso (0).
11δ é a rotação relativa entre as seções adjacentes à rótula introduzida na cria-ção do Sistema Principal devido a
11 =X no caso (1).

Luiz Fernando Martha – Método das Forças – 171 Cálculo de 10δ pelo Princípio das Forças Virtuais (PFV) Sistema Real (Estrutura da qual se quer calcular a rotação relativa.) É o caso (0).
Sistema Virtual (Estrutura com momentos unitários virtuais na di-reção da rotação relativa que se quer calcular.) É o caso (1) com 11 =X .
PFV: UWE =
→EW Trabalho das forças externas do sistema virtual com os correspondentes deslocamentos externos do sistema real. Neste caso, o trabalho externo virtual é igual ao produ-to de 11 =X por 10δ mais o produto da reação vertical no apoio direito do caso (1) – força de 1/6 para baixo – pelo recalque de apoio:
)03.0()6/1(1 10 −⋅−+⋅= δEW .
⇒= UWE
∫∫ ⋅−∆−∆⋅
+= 03.061)(
101
10 dxMh
TTdxEI
MM siαδ
EI
EI
18003.0610.16
212
60.0)50(
3600.1613605.0
313605.0
3121
10
−=⋅−
⋅⋅−⋅⋅−⋅
+
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅⋅=
α
δ
EIEI460.10.1
3121
11 +=
⋅⋅⋅⋅⋅=δ
kNmXX 450 111110 =⇒=⋅+δδ Momentos Fletores Finais
M M = M0 + M1·X1 [kNm]
→U Energia de deformação interna virtual. (Despreza-se a energia de deformação por cisalha-mento e, como o esforço normal no caso (1) é nulo, a energia de deformação axial é nula.) Portanto, a energia de deformação é somente devi-da à flexão, isto é, é a energia (virtual) provocada pelos momentos fletores do sistema virtual 1MM = com as correspondentes rotações relativas internas do sistema real θd . A rotação relativa interna real no caso (0) é devida às cargas de 40 kN aplicadas e devida à variação de temperatura:
TP ddd θθθ += Sendo,
dxEIMd P )/( 0=θ e
dxhTTd siT ]/)([ ∆−∆⋅= αθ
Deve ser observado que o recalque de apoio não provoca rotação relativa interna (só provoca movi-mento de corpo rígido). Assim:
∫∫∫∫ +===estrutura
T
estrutura
P
estruturaestruturadMdMdMdMU θθθθ 111
∫∫∆−∆⋅⋅
+⋅
= dxh
TTMdxEI
MMU si )(101 α
Exemplo 08 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Todas as barras têm a mesma inércia à flexão EI = 4.0x104 kNm2. Somente considere deformações por flexão.

172 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Sistema Principal e Hiperestáticos
X2
X2X1 X1
Caso (0) – Solicitação externa isolada no SP
[kNm]
M0
Caso (1) – Hiperestático X1 isolado no SP
M1 x X1
X1 = 1
X1 = 1
1/3
1/3
1/3
1/3
1/3
1/3
1/3
1/3
1/3 1/3
2
Caso (2) – Hiperestático X2 isolado no SP
M2x X2
X2 = 1X2 = 1
1/6
1 1/3
1/6
1/3 1/6
1/31/3
1/6
1/3
1/3
1/6
1/6
Sistema de Equações de Compatibilidade
+=−=
⇒
=
+
kNmXkNmX
XX
3.246.48
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI936391
31391
313721
313722
2132162
211
10 +=
⋅⋅⋅+⋅⋅⋅−⋅⋅⋅+⋅⋅⋅+⋅⋅⋅⋅=δ
EIEI486391
31391
313721
313721
2132161
211
20 −=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅=δ
EIEI16311
3143221
11 +=
⋅⋅⋅⋅+⋅⋅⋅=δ
EIEI 213311
61311
313121
2112 −=
⋅⋅⋅+⋅⋅⋅−⋅⋅−⋅== δδ
EIEI7611
31311
3123111
22 +=
⋅⋅⋅+
⋅⋅⋅⋅+⋅⋅⋅=δ
Momentos fletores finais
22110 XMXMMM ++=
[kNm]
M

Luiz Fernando Martha – Método das Forças – 173 Exemplo 09 Considere a estrutura hiperestática abaixo, onde também está indicado o seu diagrama de momentos fleto-res. Todas as barras têm a mesma inércia a flexão EI e pode-se considerar que não existem deformações axi-ais e de cisalhamento nas barras.
M [kNm]
Pede-se: Item (a) Determine um possível sistema principal (Método das Forças) para o quadro acima. As incógnitas
(hiperestáticos) também devem ser indicadas. Mostre a decomposição do sistema principal em qua-dros isostáticos simples (tri-articulados, bi-apoiados ou engastados e em balanço).
Item (b) Considerando o sistema principal encontrado no item anterior, indique os casos básicos – caso (0), ca-
so (1), caso (2), etc. – utilizados para análise da estrutura pelo Método das Forças. Determine os dia-gramas de momentos fletores para todos os casos básicos.
Item (c) Escreva literalmente (somente símbolos, sem números) o sistema de equações finais da solução desta
estrutura pelo Método das Forças. Escolha uma destas equações e indique as expressões numéricas envolvidas nos cálculos de cada um dos coeficientes da equação escolhida. Não é preciso completar as contas para calcular os coeficientes. Indique que tipo de condição que esta equação está impondo. In-dique as interpretações físicas e unidades de todos os coeficientes que aparecem na equação escolhida.
Item (d) Com base no diagrama de momentos fletores fornecido para a estrutura hiperestática e no sistema
principal escolhido, determine os valores das incógnitas (hiperestáticos) que resultariam da solução da estrutura pelo Método das Forças. Demonstre que a superposição dos casos básicos, considerando os valores dos hiperestáticos encontrados, resulta no diagrama de momentos fletores fornecido.
Item (a)
X1
X1
X2
Sistema Principal e Hiperestáticos (g=3)
X2
X3
X1
X1
X2
X2
X3

174 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Item (b) Caso (0) – Solicitação externa isolada no SP
M0
X1=1
M1
. X1
Caso (1) – X1 isolado no SP
1/3X1=1
1/3 1/3
1/3
1/6
1/6
1/6
1/6
1/6 1/6
X2=1
M2
. X2
Caso (2) – X2 isolado no SP
X2=1
1/3
1/3
1/3 1/3
1/3 1/3
X3=1M3
. X3
Caso (3) – X3 isolado no SP
1/3 1/3
Item (c) Equações de Compatibilidade
=
+
000
3
2
1
333231
232221
131211
30
20
10
XXX
δδδδδδδδδ
δδδ
Considere a primeira equação deste sistema: Esta equação impõe uma condição de compatibilidade interna: a rotação relativa entre as seções adjacentes à rótula associada a X1 é nula, isto é, no ponto onde foi introduzida a rótula a rotação da elástica é contínua. Termo de carga δ10 [rad] → rotação relativa entre as seções adjacentes à rótula associada a X1 devida à solicitação externa no caso (0):
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅= 3725.03131325.0
313725.0
3131925.0
313601
316361
311
10 EIδ
Coeficiente de flexibilidade δ11 [rad/kNm] → rotação relativa entre as seções adjacentes à rótula associada a X1 devida a X1 = 1:
⋅⋅⋅⋅+
⋅⋅⋅⋅+⋅⋅⋅⋅= 35.05.0314311
312611
311
11 EIδ
Coeficiente de flexibilidade δ12 [rad/kNm] → rotação relativa entre as seções adjacentes à rótula associada a X1 devida a X2 = 1:
Luiz Fernando Martha – Método das Forças – 175
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−⋅= 315.031315.0
31315.0
21311
61311
311
12 EIδ
Coeficiente de flexibilidade δ13 [rad/kNm] → rotação relativa entre as seções adjacentes à rótula associada a X1 devida a X3 = 1:
⋅⋅⋅−⋅⋅⋅⋅= 315.021315.0
311
13 EIδ
Item (d) Os valores dos hiperestáticos podem ser ob-tidos do diagrama de momentos fletores fi-nais da estrutura que foi fornecido:
M [kNm]
X1 = +35.1 kNm
X2 = +28.2 kNm
X3 = +89.1 kNm
Demonstração de que a superposição dos casos básicos resulta nos momentos finais: M0 + M1·X1 + M2·X2 + M3·X3 = M Considere o momento fletor assinalado no dia-grama. Observa-se que este valor pode ser ob-tido pela superposição dos momentos fletores dos casos básicos nesta seção: +132 + 0.5·35.1 + (-1.0)·28.2 + (-1.0)·89.1 = +32.3 O mesmo pode ser verificado para outras se-ções.
Exemplo 10 Considere os dois pórticos mostrados abaixo. As duas estruturas têm como solicitação o carregamento uni-formemente distribuído indicado e um aumento de temperatura ∆Ti = 16 °C nas fibras inferiores da viga. As fibras superiores da viga não sofrem variação de temperatura (∆Ts = 0 °C). Todas as barras têm um material com módulo de elasticidade E = 1,0 x 108 kN/m2 e coeficiente de dilatação térmica α = 10–5 /°C. Todas a bar-ras têm seções transversais com momento de inércia I = 1,0 x 10–3 m4, altura h = 0.60 m e centro de gravidade no meio de altura. Somente considere os efeitos axiais para a variação de temperatura.

176 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Pede-se: Item (a): Determine o diagrama de momentos fletores da estrutura isostática. Item (b): Determine o diagrama de momentos fletores da estrutura hiperestática. Item (c): Considere que as colunas dos quadros acima tiveram a seção transversal modificada para uma com
momento de inércia I = 2,0 x 10-3 m4 (a viga não se altera). Responda: (c.1) Os diagramas de momentos fletores das estruturas isostáticas se alteram? Por que? (c.2) Os diagramas de momentos fletores das estruturas hiperestáticas se alteram? Por que? Item (a)
M [kNm]
Item (b)
X1
Sistema Principal e Hiperestático (g=1)
Caso (0) – Solicitação externa isolada no SP
M0 δ10
X1=1 M1
. X1
Caso (1) – X1 isolado no SP
1 X1=11
δ11
N1= +1
N1= 0 N1= 0
Equação de compatibilidade
011110 =⋅+ Xδδ Sendo Tq
101010 δδδ += :
→q10δ deslocamento horizontal da seção do
apoio da direita devido à carga distribuída no caso (0).
→T10δ deslocamento horizontal da seção do
apoio da direita devido à variação de temperatura no caso (0).
mEI
dxEI
MMq 50110 108646723
321 −⋅+=
⋅⋅⋅== ∫δ
∫∫ +=
viga
T
viga
TT duNdM 1110 θδ
( ) dxdxh
TTd siT
380⋅=
∆−∆⋅= ααθ
dxdxTdu GCT ⋅⋅=⋅∆⋅= 8αα
∫∫ ⋅+⋅=
vigaviga
T dxNdxM 1110 8380 ααδ
mT 510 1052816836
380 −⋅+=⋅⋅⋅+⋅⋅⋅= ααδ

Luiz Fernando Martha – Método das Forças – 177
( )
⋅⋅+⋅⋅⋅⋅⋅== ∫ 63333331212
111 EI
dxEI
Mδ
kNm/1072 511
−⋅+=δ
( )
kNX
X
X
358
0107210528864
0
1
155
11110
−=⇒
=⋅⋅+⋅+
→=⋅+−−
δδ
Momentos fletores finais
110 XMMM ⋅+=
M [kNm]
Item (c) Item (c.1) – Na estrutura isostática, o diagrama de momentos fletores só depende dos valores da carga e rea-ções, e da geometria da estrutura. Com a consideração da hipótese de pequenos deslocamentos, as equações de equilíbrio podem ser escritas para a geometria indeformada (original) da estrutura. Portanto, o diagrama de momentos fletores não se altera com a modificação do momento de inércia da seção transversal das colunas. No caso da carga uniformente distribuída, a estrutura isostática terá sempre o diagrama de momentos fleto-res indicado no item (a) (diagrama parabólico na viga). Momentos fletores devidos à variação de temperatu-ra isolada na estrutura isostática são sempre nulos. Item (c.2) – Na estrutura hiperestática, por ter vínculos excedentes, os esforços internos dependem da rigidez relativa entre as barras. Com as colunas mais rígidas do que a viga, as rotações das extremidades da viga são menores do que no caso com todas as barras com mesma rigidez à flexão EI, se aproximando do caso de uma viga com extremidades engastadas. Portanto, o diagrama de momentos fletores fica alterado com a modificação do momento de inércia da seção transversal das colunas. A solução da estrutura hiperestática pelo Método das Forças mostrada no item (b) demonstra que os valores dos momentos fletores finais dependem dos valores relativos entre momentos de inércia das seções transver-sais das barras. Exemplo 11 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 1,0 x 105 kNm2.
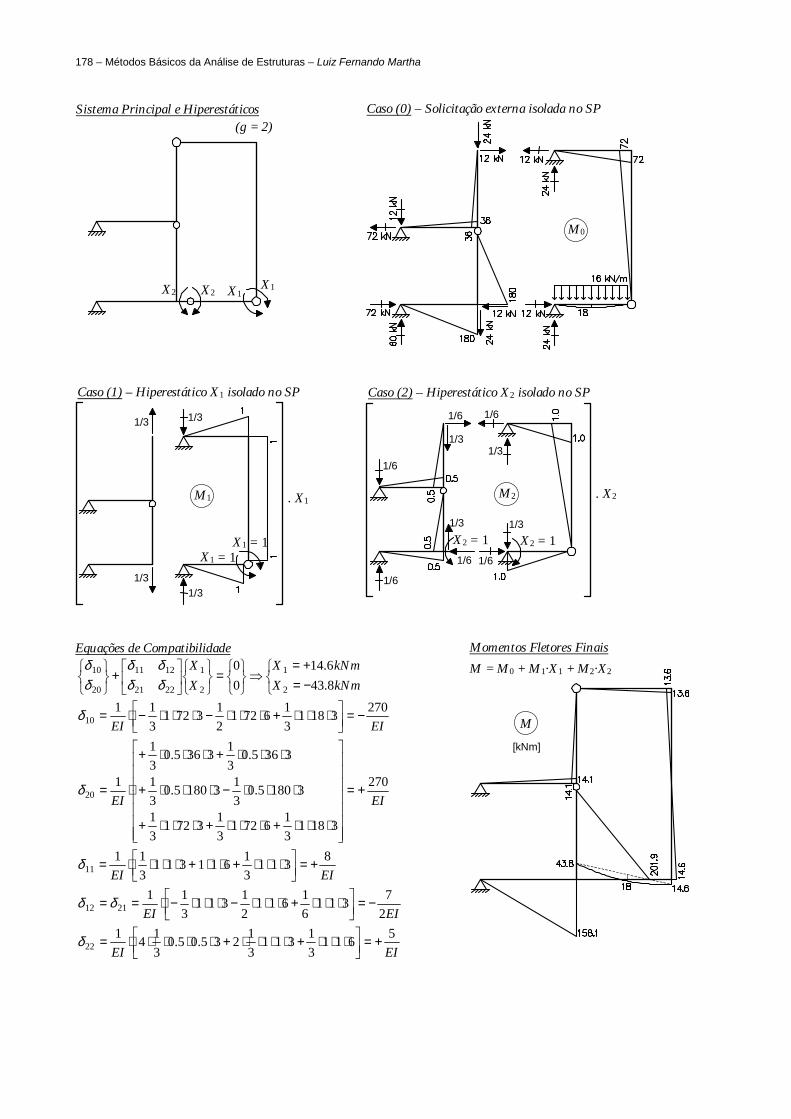
178 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Sistema Principal e Hiperestáticos
(g = 2)
X1X1 X2 X2
Caso (0) – Solicitação externa isolada no SP
M0
X1 = 1X1 = 1
Caso (1) – Hiperestático X1 isolado no SP
M1 . X1
1/3 1/3
1/3 1/3
X2 = 1
Caso (2) – Hiperestático X2 isolado no SP
M2 . X2
X2 = 1
1/61/6
1/6
1/6
1/61/6
1/31/3
1/3 1/3
Equações de Compatibilidade
−=+=
⇒
=
+
kNmXkNmX
XX
8.436.14
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI2703181
316721
213721
311
10 −=
⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅=δ
EIEI270
3181316721
313721
31
31805.03131805.0
31
3365.0313365.0
31
120 +=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+
⋅⋅⋅−⋅⋅⋅+
⋅⋅⋅+⋅⋅⋅+
⋅=δ
EIEI8311
31611311
311
11 +=
⋅⋅⋅+⋅⋅+⋅⋅⋅⋅=δ
EIEI 27311
61611
21311
311
2112 −=
⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅== δδ
EIEI5611
31311
31235.05.0
3141
22 +=
⋅⋅⋅+⋅⋅⋅⋅+⋅⋅⋅⋅⋅=δ
Momentos Fletores Finais
M
M = M0 + M1·X1 + M2·X2
[kNm]

Luiz Fernando Martha – Método das Forças – 179 Exemplo 12 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 2,4 x 104 kNm2.
X1
X1
X2
Sistema Principal e Hiperestáticos (g=2)
X2
Caso (0) – Solicitação externa isolada no SP
M0
M1
. X1
Caso (1) – X1 isolado no SP
1/6
1/6
1/6
1/4 1/4
1/6
X1=1
X1=1
M2
. X2
Caso (2) – X2 isolado no SP
X2=1
X2=11/4
1/4
1/4
1/4
1/4
1/4
Equações de Compatibilidade
+=−=
⇒
=
+
kNmXkNmX
XX
6,600,13
00
2
1
2
1
2221
1211
20
10
δδδδ
δδ
EIEI280
64513141201
31
61201216301
216301
31
110 −=
⋅⋅⋅+⋅⋅⋅−
⋅⋅⋅−⋅⋅⋅+⋅⋅⋅⋅=δ
EIEI43041201
3161201
216301
211
20 −=
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅⋅=δ
EIEI 338
411312
611611312
111 +=
⋅⋅⋅⋅+
⋅⋅+
⋅⋅⋅⋅⋅=δ
EIEI 322411
316111
2112 +=
⋅⋅⋅+⋅⋅⋅== δδ
EIEI 326411
3126111
22 +=
⋅⋅⋅⋅+⋅⋅⋅=δ
Momentos Fletores Finais
M
M = M0 + M1·X1 + M2·X2
[kNm]

180 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Exemplo 13 – Provão de Engenharia Civil, 2002 Em uma construção a meia encosta, a laje de piso foi apoiada em estruturas metálicas compostas de perfis I, colocados de modo a oferecer a maior resistência ao momento fletor atuante. Ao inspecionar a obra para recebimento, você verificou a existência de um recalque vertical de 1 cm no engaste A de uma das estruturas metálicas, cujo modelo estrutural é apresentado na figura abaixo (na esquerda). A fim de avaliar os esforços adicionais nessa estrutura, ocasionados pelo recalque, você utilizou o Método das Forças e, para tanto, esco-lheu o Sistema Principal (no qual foi colocada uma rótula no nó B) e o hiperestático X1 (carga momento em ambos os lados da rótula inserida em B), mostrados na figura (no centro). A seção transversal do perfil e a orientação dos eixos x e y estão representadas na figura (na direita).
A
B C
laje
encosta
X1
X1
x
y Módulo de elasticidade do material: E = 2,0 x 108 kN/m2
Momentos de inércia da seção transversal: Jx = 5,1 x 10-5 m4 Jy = 8,4 x 10-6 m4
Com base no exposto, pede-se o diagrama de momentos fletores, causado apenas pelo recalque em A. Despreze deformações axiais das barras. Caso (0) – Solicitação externa isolada no SP
M0 = 0 01,0=ρ m
ρ4/10 ρδ =
310 105,2 −⋅+=δ rad
M1 . X1
Caso (1) – X1 isolado no SP
1/4
=AV 1/4
1
X1=1X1=1
Equação de compatibilidade
011110 =⋅+ Xδδ
10δ é a rotação relativa entre as seções adjacentes à rótula do Sistema Principal provocada pelo recalque de apoio no caso (0).
11δ é a rotação relativa entre as seções adjacentes à rótula do Sistema Principal provocada por 11 =X no caso (1).
EIEI 310411
312111
11 +=
⋅⋅⋅+⋅⋅⋅=δ
O enunciado diz que os perfis metálicos foram colocados de modo a oferecer a maior resis-tência ao momento fletor atuante. Portanto, o momento de inércia da seção transversal a ser adotado é o maior momento de inércia da barra: I = Jx = 5,1 x 10-5 m4.
65,7101,51023
10105,20 11583
11110 −=⇒
⋅⋅⋅⋅+⋅→=⋅+ −
− XXXδδ kNm.
Cálculo de 10δ pelo Princípio das Forças Virtuais (PFV) Sistema Real (Estrutura da qual se quer calcular a rotação relativa.) É o caso (0).
Sistema Virtual (Estrutura com momentos unitários virtuais na direção da rotação relativa que se quer cal-cular.) É o caso (1) com 11 =X .

Luiz Fernando Martha – Método das Forças – 181 PFV: UWE =
→EW Trabalho das forças externas do sistema virtual com os correspondentes deslocamentos externos do sistema real. Neste caso, o trabalho externo virtual é igual ao produto de 11 =X por 10δ mais o produto da reação vertical no apoio esquerdo do caso (1) – força de 1/4 para cima – pelo recalque de apoio:
ρδ ⋅+⋅= AE VW 101
)01,0()4/1(1 10 −⋅++⋅= δEW
→U Energia de deformação interna virtual. O recalque de apoio não provoca deformações internas (só provoca movimentos de corpo rígido das barras). Portanto:
0=U
⇒= UWE 0)01,0()4/1(10 =−⋅++δ 3
10 105,24/01,0 −⋅+==∴ δ rad Momentos Fletores Finais
M
M = M0 + M1·X1
[kNm] M0 = 0 X1 = –7,65
Exemplo 14 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 1,0 x 104 kNm2.
X1
X1 X2
Sistema Principal e Hiperestáticos (g=2)
X2
Caso (0) – Solicitação externa isolada no SP
M0

182 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha
M1 . X1
Caso (1) – X1 isolado no SP
1/3
1/6
X1=1
X1=1 1/3 1/3 1/3
1/6
1/6
1/6
1/6 1/6
. X2
Caso (2) – X2 isolado no SP
M2
1/3 X2=1
X2=1
1/3 1/3 1/3
1/6
1/6 1/6
1/6
Equações de Compatibilidade
−=+=
⇒
=
+
kNm5,21kNm8,6
00
2
1
2
1
2221
1211
20
10
XX
XX
δδδδ
δδ
EIEI147
36131361
21
6601313181
313601
31
110 −=
⋅⋅⋅+⋅⋅⋅+
⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−⋅=δ
EIEI156361
316601
313181
313601
311
20 +=
⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−⋅⋅⋅⋅=δ
EIEI9
311311312
611312
111 +=
⋅⋅+
⋅⋅⋅⋅
+
⋅⋅⋅⋅⋅=δ
EIEI4611
31311
3121
2112 −=
⋅⋅⋅−
⋅⋅⋅−⋅⋅== δδ
EIEI6311
312611
3121
22 +=
⋅⋅⋅⋅+
⋅⋅⋅⋅⋅=δ
Momentos Fletores Finais M = M0 + M1·X1 + M2·X2
M
[kNm]
Exemplo 15 Utilizando o Método das Forças, determine o dia-grama de esforços normais para a treliça hiperestáti-ca ao lado submetida ao carregamento indicado e a um aumento uniforme de temperatura de 50 °C em todas as barras. Todas as barras têm o mesmo valor para a inércia axial EA = 1,0 x 105 kN e para o coefi-ciente de dilatação térmica α = 1,0 x 10-5 /°C. Sabe-se que o deslocamento axial relativo interno para uma variação uniforme de temperatura T é igual a: duT = αTdx.

Luiz Fernando Martha – Método das Forças – 183
X1
Sistema Principal e Hiperestáticos (g=1)
Caso (0) – Solicitação externa isolada
N0
(N0 só é devido à carga de 50 kN pois a variação de temperatura não provoca esforços no SP isostático )
+25
225-
+25
225-0
no SP
N1. X1
Caso (1) – X1 isolado no SP
X1=11
+1 +1
0 0 0
Equação de Compatibilidade 011110 =+ Xδδ
Termo de carga: TP101010 δδδ +=
→P10δ deslocamento horizontal no
apoio da direita devido à carga P = 50 kN no caso (0).
→P10δ deslocamento horizontal no
apoio da direita devido à variação uniforme de temperatura T = 50 °C no caso (0).
( )[ ]EAEA
dxEA
NN
estrutura
P 2004251210110 +=⋅⋅⋅⋅== ∫δ
( )[ ] ααααδ 4004125050 11110 +=⋅⋅⋅=⋅=== ∫∫ ∫ dxNTdxNduNestrutura
TT
( )[ ]EAEA
dxEAN
estrutura
84112121
11 +=⋅⋅⋅⋅== ∫δ
kN75010810)400200(
/101kN101
1
155
55
−=∴=⋅+⋅+⇒
⋅=⋅=−−
−
XX
CEA �α
Esforços Normais Finais N = N0 + N1·X1
N
[kN]
–50
225-
–50
225-
0
Exemplo 16 Determine pelo Método das Forças o diagrama de momentos fletores do quadro hiperestático ao lado. Somente considere deformações por flexão. Todas as barras têm a mesma inércia à flexão EI = 9,6 x 104 kNm2.
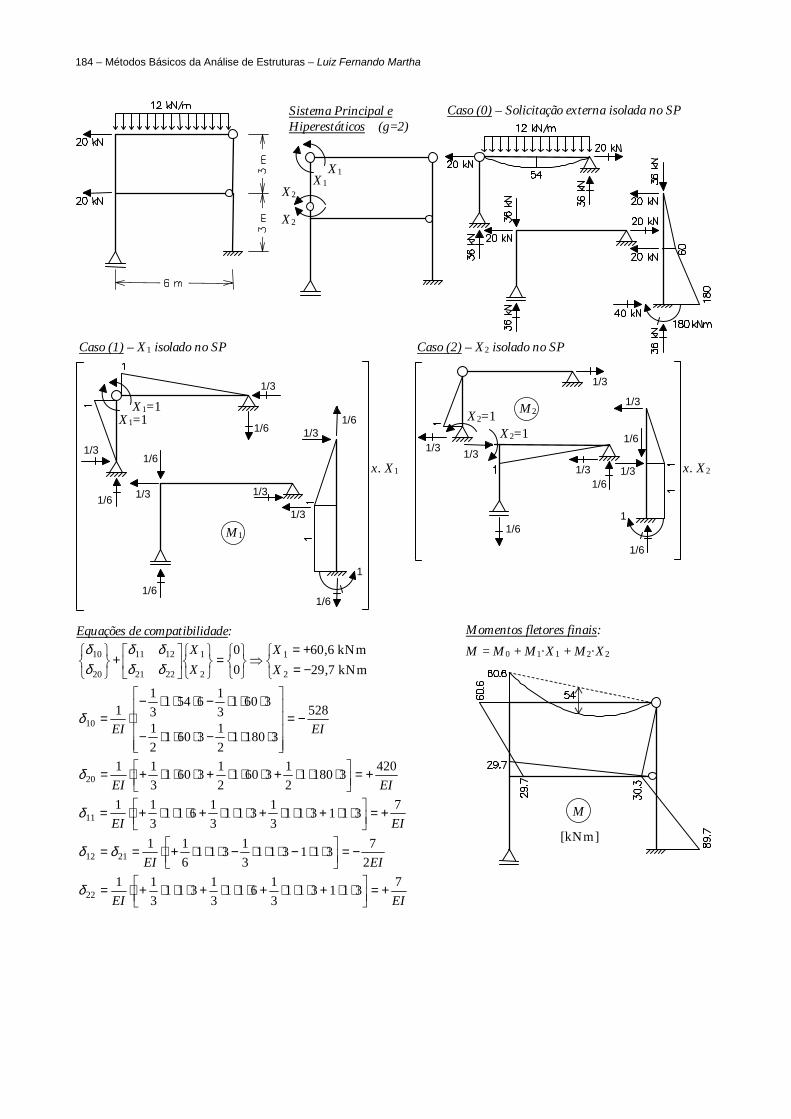
184 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha
X1 X1
X2
X2
Sistema Principal e Hiperestáticos (g=2)
Caso (0) – Solicitação externa isolada no SP
M1
x. X1
Caso (1) – X1 isolado no SP
1/6
X1=1
1/3
1/6
X1=1
1/3
1/3
1/3 1/3
1/3
1/6
1/6
1/6 1/6
1
M2
Caso (2) – X2 isolado no SP
X2=1X2=1
1/3
1/6 1
1/6
1/6
1/6 1/3 1/3
1/3 1/3
1/3
Equações de compatibilidade:
−=+=
⇒
=
+
kNm7,29kNm6,60
00
2
1
2
1
2221
1211
20
10
XX
XX
δδδδ
δδ
EIEI528
31801213601
21
3601316541
31
110 −=
⋅⋅⋅−⋅⋅⋅−
⋅⋅⋅−⋅⋅⋅−⋅=δ
EIEI42031801
213601
213601
311
20 +=
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅=δ
EIEI7311311
31311
31611
311
11 +=
⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅=δ
EIEI 27311311
31311
611
2112 −=
⋅⋅−⋅⋅⋅−⋅⋅⋅+⋅== δδ
EIEI7311311
31611
31311
311
22 +=
⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅=δ
Momentos fletores finais: M = M0 + M1·X1 + M2·X2
M
[kNm]
x. X2

Luiz Fernando Martha – Método das Forças – 185 Exemplo 17 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 6EI, para todas as barras.
Sistema Principal (SP) e Hiperestático
X1
Caso (0) – Solicitação externa isolada no SP
120
M0
[kNm]
240
0
T0
[kNm]
+1200
Caso (1) – Hiperestático X1 isolado no SP
M1
–3
T1
0 x X1
3 6
3
3
–6X1 = 1 X1 = 1
Equação de Compatibilidade
011110 =+ Xδδ
[ ]tGJEI
1120)6(61240363124036
6112066
31
10 ⋅⋅−⋅+⋅
⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−=δ
EIEIEI2880
643202160
10 −=−−=δ
[ ]tGJEI
1)6()6(6)3()3(6166631333
31333
31333
31
11 ⋅−⋅−⋅+−⋅−⋅+⋅
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅=δ
EIEIEI144
627099
11 +=+=δ
⇒ X1 = 20 kN
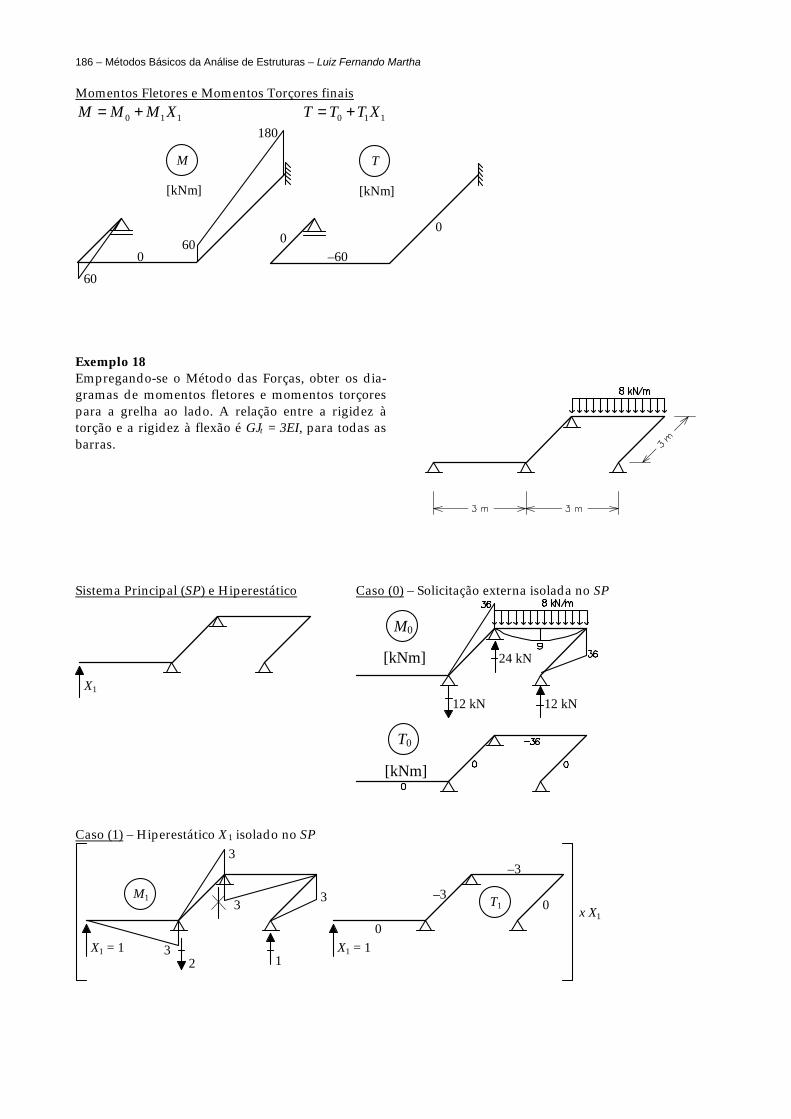
186 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Momentos Fletores e Momentos Torçores finais
110 XMMM += 110 XTTT +=
60
M
[kNm]
180
–60
T
[kNm]
0
60
0
0
Exemplo 18 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 3EI, para todas as barras.
Sistema Principal (SP) e Hiperestático
X1
Caso (0) – Solicitação externa isolada no SP
24 kN
12 kN 12 kN
M0
[kNm]
T0
[kNm]
Caso (1) – Hiperestático X1 isolado no SP
M1 T1 x X1
X1 = 1 X1 = 1
3 –3
–3
0
0 3 3
3 2 1

Luiz Fernando Martha – Método das Forças – 187 Equação de Compatibilidade
011110 =+ Xδδ
[ ]EIEIEIGJEI t
35133242431)36()3(313633
31933
313633
31
10 +=+=⋅−⋅−⋅+⋅
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+=δ
[ ]EIEIEIGJEI t
54354361)3()3(3)3()3(31333
31333
31333
31333
31
11 +=+=⋅−⋅−⋅+−⋅−⋅+⋅
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅=δ
⇒ X1 = –6.5 kN Momentos Fletores e Momentos Torçores finais
110 XMMM +=
24 kN
5.5 kN 1 kN
M
[kNm]
6.5 kN
110 XTTT +=
T
[kNm]
Exemplo 19 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 3EI, para todas as barras.
Sistema Principal (SP) e Hiperestático
X1
Caso (0) – Solicitação externa isolada no SP M0 [kNm]
T0 [kNm]

188 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Caso (1) – Hiperestático X1 isolado no SP
M1 T1 x X1
X1 = 1 X1 = 1
3 –3
–3
0
0 3 3
3
6 Equação de Compatibilidade: 011110 =+ Xδδ ⇒ X1 = +10.25 kN
[ ]EIGJEI t
11071336)3(1393313363
313723
613363
3131083
613366
6131086
31
10 −=⋅⋅⋅−+⋅
⋅⋅⋅+⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−=δ
( )[ ]EIEIEIGJEI t
1083549013)3()3(21333
313333
31363
61336
61366
31
11 +=+=⋅⋅−⋅−⋅+⋅
⋅⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅=δ
Momentos Fletores e Momentos Torçores finais
110 XMMM += M [kNm]
30.75
5.25 9 30.75
72
46.5
5.25
110 XTTT += T
[kNm]
–30.75
–72
0 +5.25
Exemplo 20 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 3EI, para todas as barras.
Sistema Principal (SP) e Hiperestático
X1

Luiz Fernando Martha – Método das Forças – 189 Caso (0) – Solicitação externa isolada no SP M0 [kNm] T0 [kNm]
20
20 20
20
120
120
0 0
0 20
20 20
20
+120
0
0
0 0
Caso (1) – Hiperestático X1 isolado no SP
1/2
0 0
0 0
M1 T1
x X1X1 = 1 X1 = 13 +3
1/2 3
3 3
+3
1/2
1/2
Equação de Compatibilidade:
[ ]EIGJEI t
3601016120361
10 −=⋅+⋅
⋅⋅⋅−=δ
[ ]EIEIEIGJEI t
813815416)3()3(3)3()3(1633
312333
31211 +=+=⋅⋅+⋅++⋅+⋅++⋅
⋅⋅⋅⋅+
⋅⋅⋅⋅=δ
011110 =+ Xδδ ⇒ X1 = +4.4 kN Momentos Fletores e Momentos Torçores finais
M [kNm] T [kNm]
120
120
+120
0
0
110 XMMM += 110 XTTT +=
13.3 13.3
13.3
13.3
+13.3+13.3
Exemplo 21 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 6EI, para todas as barras.

190 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha Sistema Principal (SP) e Hiperestático (g = 1)
X1
Caso (0) – Solicitação externa isolada no SP
M0 [kNm] T0 [kNm]
20
20
20
20
18060
60
60
60
+180 0
180
+60
+60
Caso (1) – Hiperestático X1 isolado no SP
0
M1 T1
x X1 X1 = 1 –6
–3
3
3 6
0
3
X1 = 10
Equação de Compatibilidade:
[ ]EIEIEIGJEIGJ
EI
tt
39606
756027007560270016)180)(6(6)60()3(
1618033161803
616603
616603
3161806
316606
613603
31
10
−=−−=−−=⋅⋅−+⋅⋅−+
⋅
⋅⋅⋅−⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−⋅⋅⋅−⋅⋅⋅+⋅⋅⋅−=δ
[ ]EIEIEIGJEIGJEI tt
1446270992709916)6()6(6)3()3(1666
31333
31311 +=+=+=⋅⋅−⋅−+⋅−⋅−+⋅
⋅⋅⋅+
⋅⋅⋅⋅=δ
011110 =+ Xδδ ⇒ X1 = +27.5 kN Momentos Fletores e Momentos Torçores finais
M [kNm] T [kNm]
15
60
60 22.5
+15 0
97.5
+60
–22.5
110 XMMM += 110 XTTT +=
22.5
Exemplo 22 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. A relação entre a rigidez à torção e a rigidez à flexão é GJt = 6EI, para todas as barras.
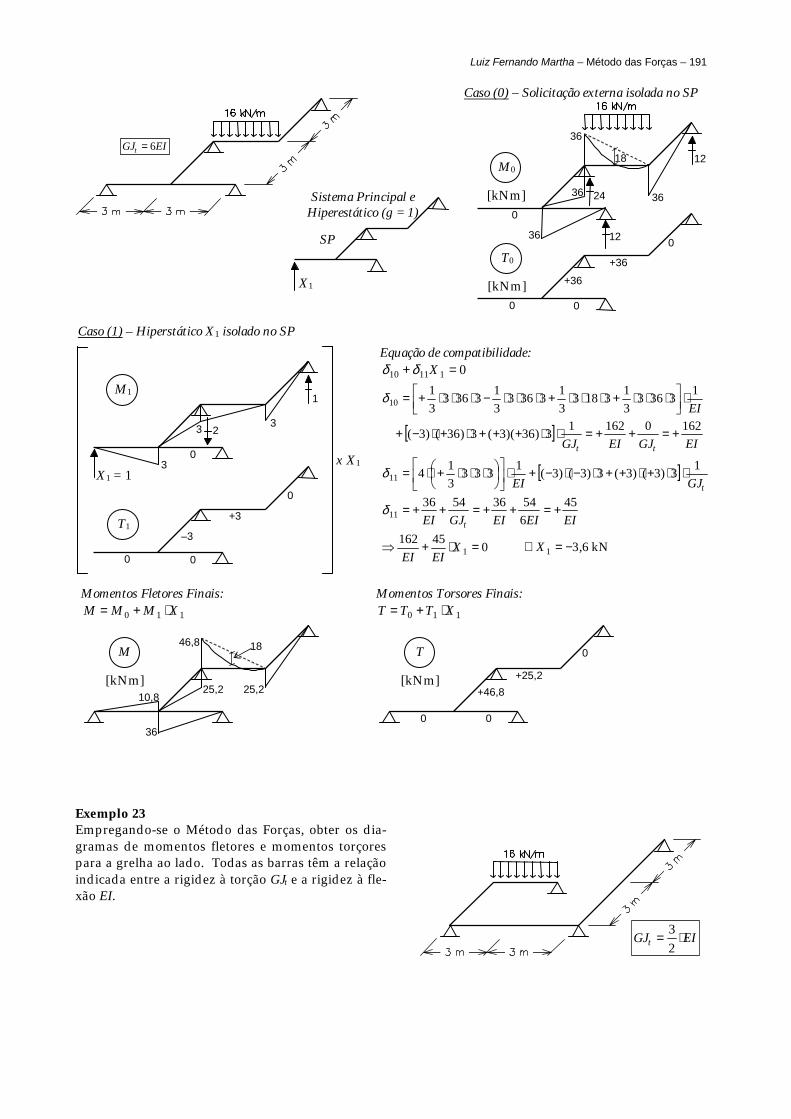
Luiz Fernando Martha – Método das Forças – 191
Equação de compatibilidade: 011110 =+ Xδδ
EI13363
313183
313363
313363
31
10 ⋅
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−⋅⋅⋅+=δ
[ ]EIGJEIGJ tt
162016213)36)(3(3)36()3( +=++=⋅⋅+++⋅+⋅−+
[ ]tGJEI
13)3()3(3)3()3(133331411 ⋅⋅+⋅++⋅−⋅−+⋅
⋅⋅⋅+⋅=δ
EIEIEIGJEI t
45654365436
11 +=++=++=δ
0451621 =⋅+⇒ X
EIEI kN6,31 −=∴ X
Momentos Fletores Finais: 110 XMMM ⋅+=
[kNm]
M
Caso (0) – Solicitação externa isolada no SP
Caso (1) – Hiperstático X1 isolado no SP
[kNm]
M0
x X1X1 = 1
SP
Sistema Principal e Hiperestático (g = 1)
X1 [kNm]
T0
M1
T1
0
–3
12
12
24
18
36
36
36
36
0
0
0
+36 +36
1
2 3 3
3
+3
0
0 0
0
Momentos Torsores Finais: 110 XTTT ⋅+=
[kNm]
T18 46,8
36
10,8 25,2 25,2
0 0
0
+25,2 +46,8
EIGJt 6=
Exemplo 23 Empregando-se o Método das Forças, obter os dia-gramas de momentos fletores e momentos torçores para a grelha ao lado. Todas as barras têm a relação indicada entre a rigidez à torção GJt e a rigidez à fle-xão EI.
EIGJt ⋅=23
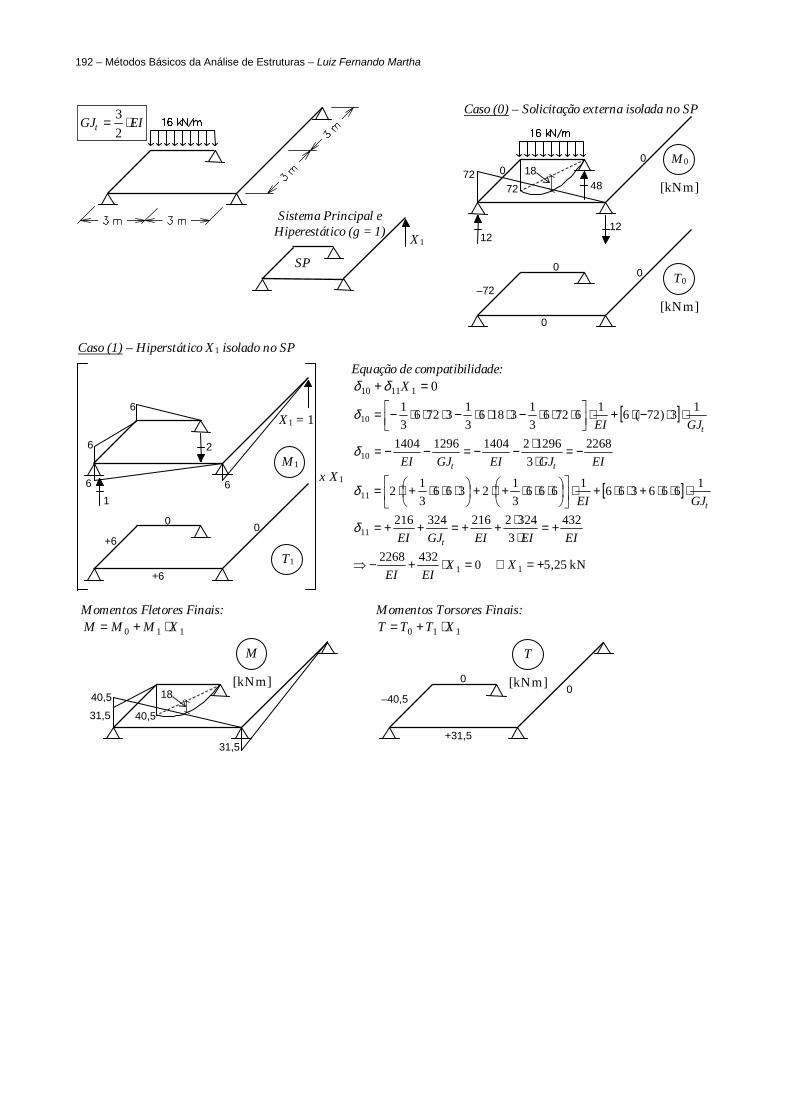
192 – Métodos Básicos da Análise de Estruturas – Luiz Fernando Martha
Equação de compatibilidade: 011110 =+ Xδδ
[ ]tGJEI
13)72(616726313186
313726
31
10 ⋅⋅−⋅+⋅
⋅⋅⋅−⋅⋅⋅−⋅⋅⋅−=δ
EIGJEIGJEI tt
22683
1296214041296140410 −=
⋅⋅−−=−−=δ
[ ]tGJEI
16663661666312366
31211 ⋅⋅⋅+⋅⋅+⋅
⋅⋅⋅+⋅+
⋅⋅⋅+⋅=δ
EIEIEIGJEI t
4323
324221632421611 +=
⋅⋅++=++=δ
043222681 =⋅+−⇒ X
EIEI kN25,51 +=∴ X
Momentos Fletores Finais: 110 XMMM ⋅+=
[kNm]
M
Caso (0) – Solicitação externa isolada no SP
Caso (1) – Hiperstático X1 isolado no SP
[kNm]
M0
x X1
X1 = 1
SP
Sistema Principal e Hiperestático (g = 1) X1
[kNm]
T0
M1
T1
0
+6
48
12
18 72
72
0 0
0
–72
1
2
6
6
6
+6
0 0
Momentos Torsores Finais: 110 XTTT ⋅+=
[kNm]
T
18
40,5
40,5 31,5
31,5
0 0
+31,5
–40,5
EIGJt ⋅=23
12
6
0