lyapunov theory and design - teqipiitk.in · lyapunov theory and design teqip workshop on control...
TRANSCRIPT

Lyapunov Theory and Design
TEQIP Workshop on
Control Techniques and Applications IIT Kanpur, 19-23 September 2016
Dr. Shubhendu Bhasin
Department of Electrical Engineering IIT Delhi

Feedback Control 101
Syste
m Controller
Sensors
desired
behavior
disturbance
Actuator
s
actual
behavior
noise
Control = Sensing + Computation + Actuation Control Design Process
Control System Objectives
• Modeling – ODE, PDE.
• Analysis – stability, robustness, performance
• Synthesis – Feedback Design Tools
• Regulation
• Tracking Stability
• Modeling Uncertainties
• Disturbances
• Sensor Noise
Robustness
• Transient
• Steady State
• Minimizing cost function
Performance
Inverted pendulum regulation Satellite attitude tracking
disturbance rejection
u + -

Why Study Nonlinear Systems? Real world is inherently nonlinear !
Mass-Spring-Coulomb Damper
Pendulum
Saturation Deadzone u u
Quantization u
Inherently nonlinear physical
laws
Actuator
nonlinearities
50
-50
e.g. on-off control, adaptive control laws Intentional nonlinearities
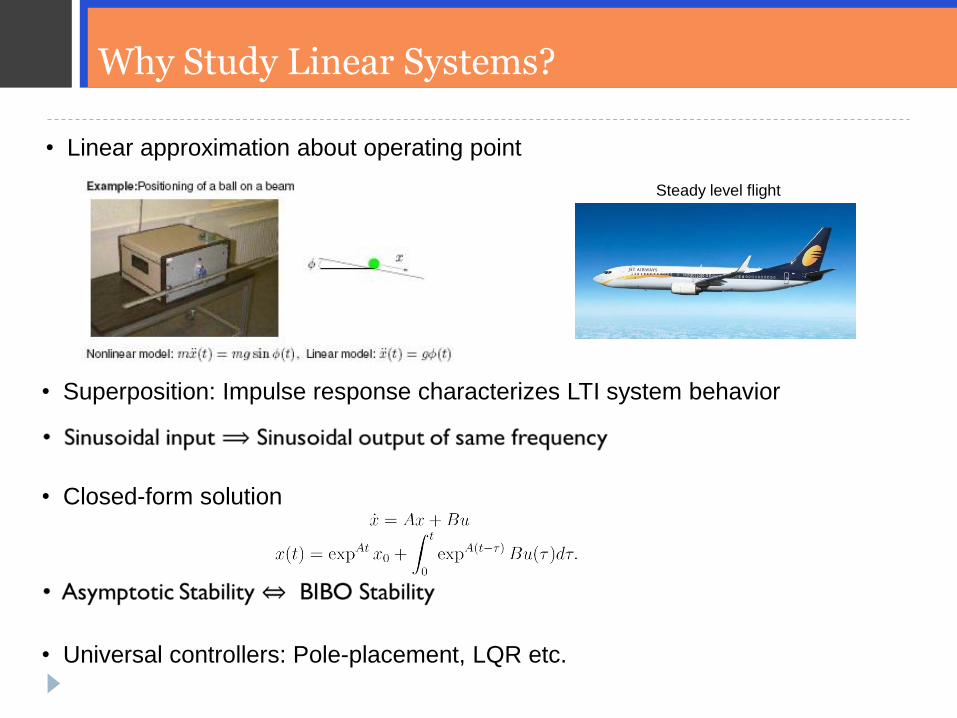
Why Study Linear Systems?
• Linear approximation about operating point
Steady level flight
• Superposition: Impulse response characterizes LTI system behavior
• Closed-form solution
• Universal controllers: Pole-placement, LQR etc.

Limitations of Linearization
• Linearization of and produce the same linear
system!
• Linearization captures local behavior around the operating point
• Linearization cannot capture rich nonlinear behavior
Limit Cycle
Multiple Equilibria
Bifurcation
Chaos
• Linearization not possible for “hard” nonlinearities e.g. backlash, saturation etc.

Nonlinear System Analysis
• No general method to solve nonlinear differential equations
• Superposition does not hold
• No general method to design controllers
Lyapunov (1857-1918)
Challenges
Lyapunov Theory (1892)
• Select a scalar positive function
• Choose u such that V(x, t) decreases i.e.
|e(t)|
t 0
|e(t)|
t 0
Bounded or
Ultimately
Bounded Exponential |e(t)|
t 0
Asymptotic

Nonlinear Systems
Autonomous System:
Non-Autonomous System:
Existence and Uniqueness of Solutions
Equilibrium Point (s)
Solution of
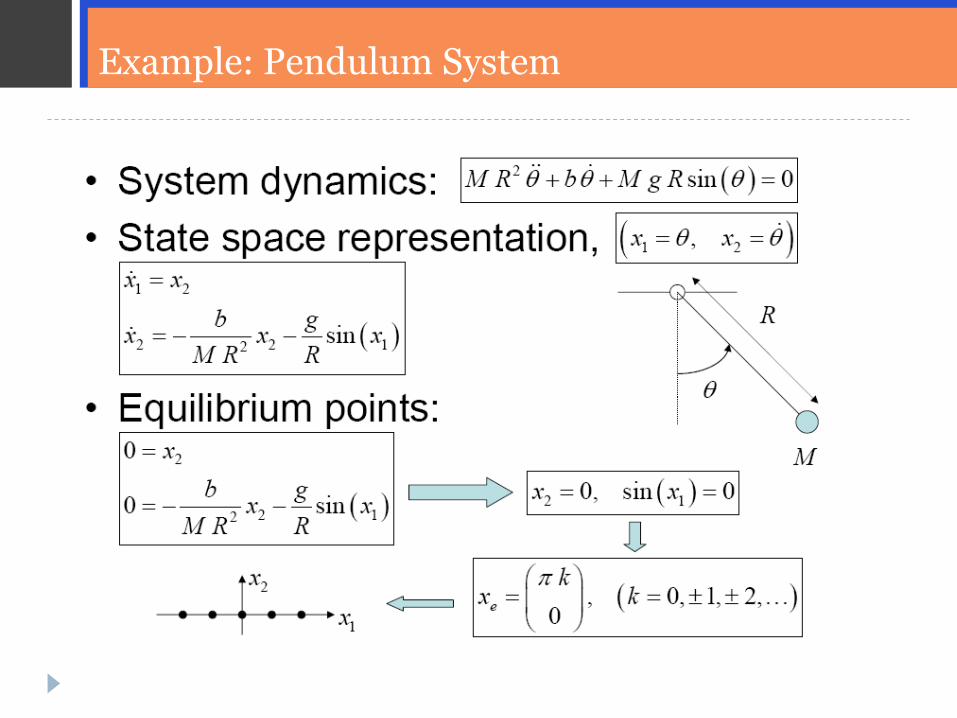
Example: Pendulum System
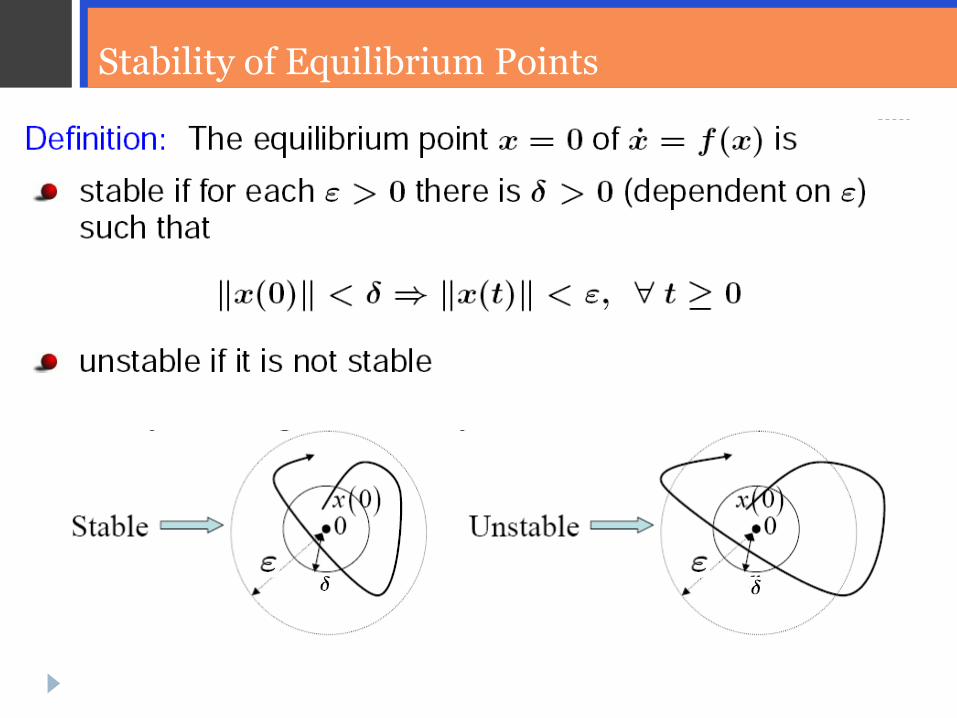
Stability of Equilibrium Points

Van der Pol Oscillator
Stable or unstable ?

Asymptotic Stability
Asymptotic Stability = Stability + Convergence Convergence Stability ?

Exponential Stability (Rate of Convergence)
Exponential Asymptotic ?
Asymptotic Exponential ?
Local Vs Global Stability
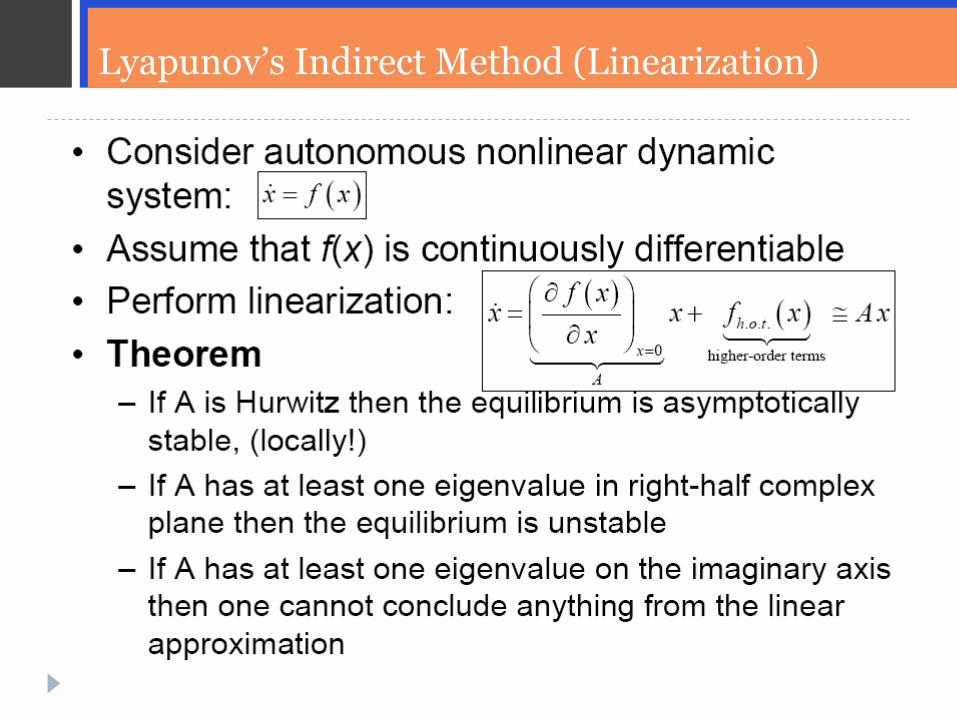
Lyapunov’s Indirect Method (Linearization)

Lyapunov’s Direct Method (Motivating Example)

Motivating Example (contd..)
Key Observations:
• Zero Energy corresponds to equilibrium
• Asymptotic stability convergence of mechanical energy to zero
• Stability properties are related to variation of mechanical energy

Lyapunov’s Direct Method (Basic Idea)
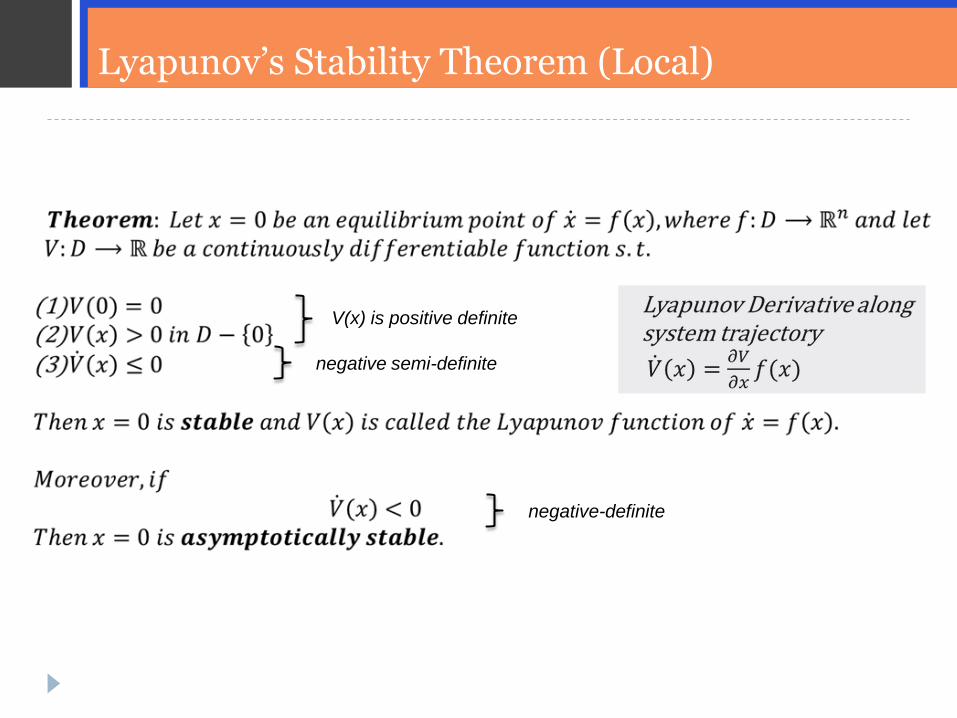
Lyapunov’s Stability Theorem (Local)
V(x) is positive definite
negative-definite
negative semi-definite

Exercise
Asymptotically stable?

Lyapunov’s Stability Theorem (Global)
V(x) is radially unbounded
Radial Unboundedness is Necessary
Divergence of states while
moving to lower “energy” curves
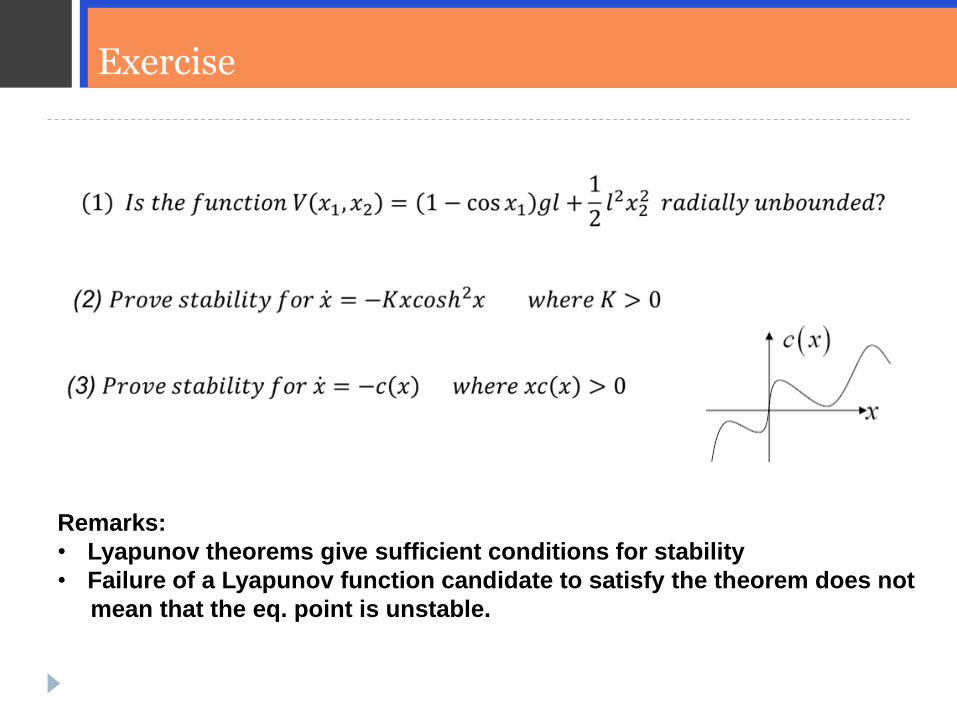
Exercise
Remarks:
• Lyapunov theorems give sufficient conditions for stability
• Failure of a Lyapunov function candidate to satisfy the theorem does not
mean that the eq. point is unstable.
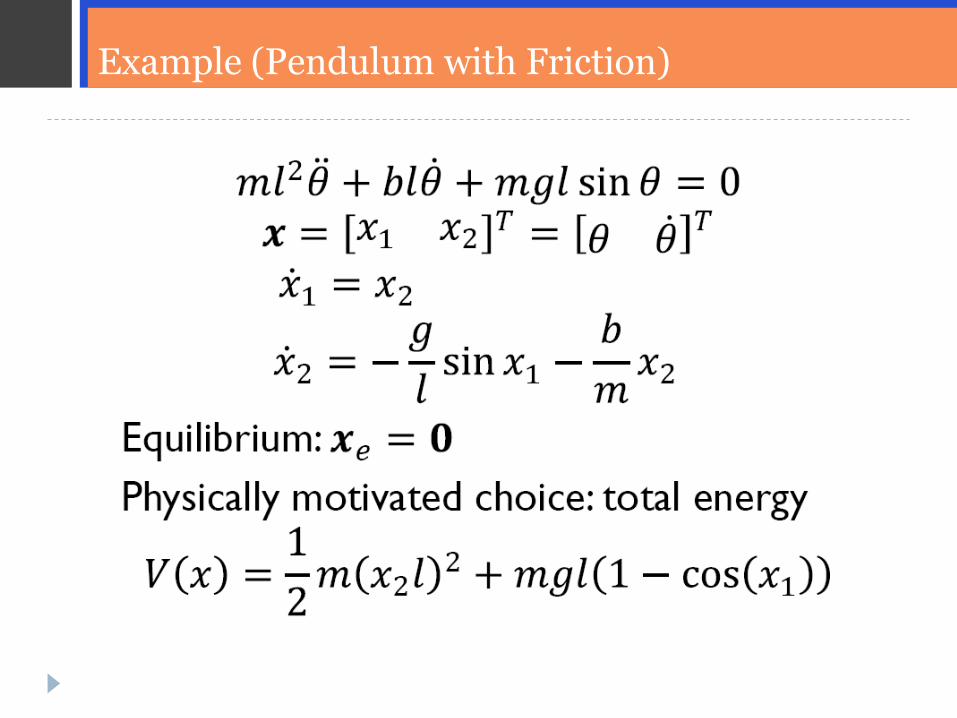
Example (Pendulum with Friction)

Stability Analysis

Using a different V(x)

LaSalle’s Invariance Set Theorem
• Useful for proving asymptotic stability when
derivative of V(x) is only negative semi-definite

Pendulum with friction (Revisit)
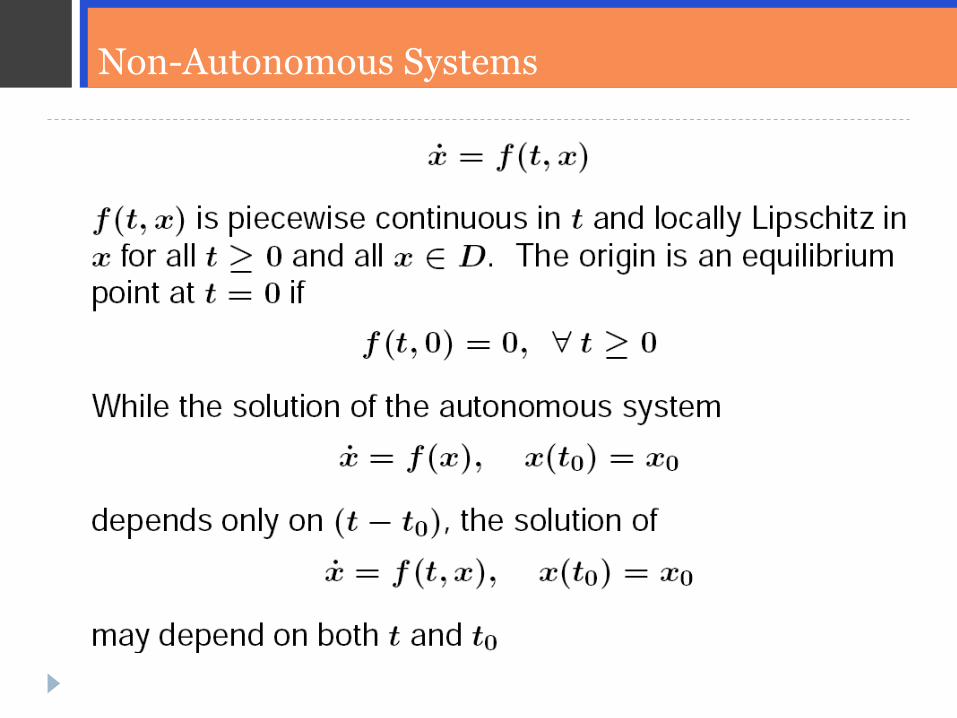
Non-Autonomous Systems
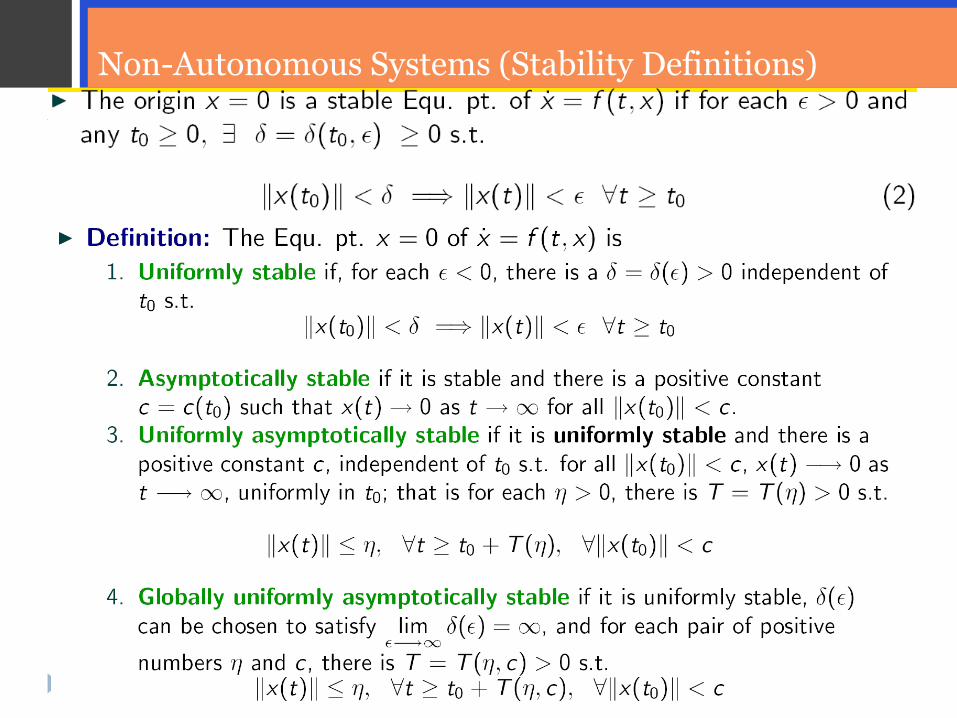
Non-Autonomous Systems (Stability Definitions)
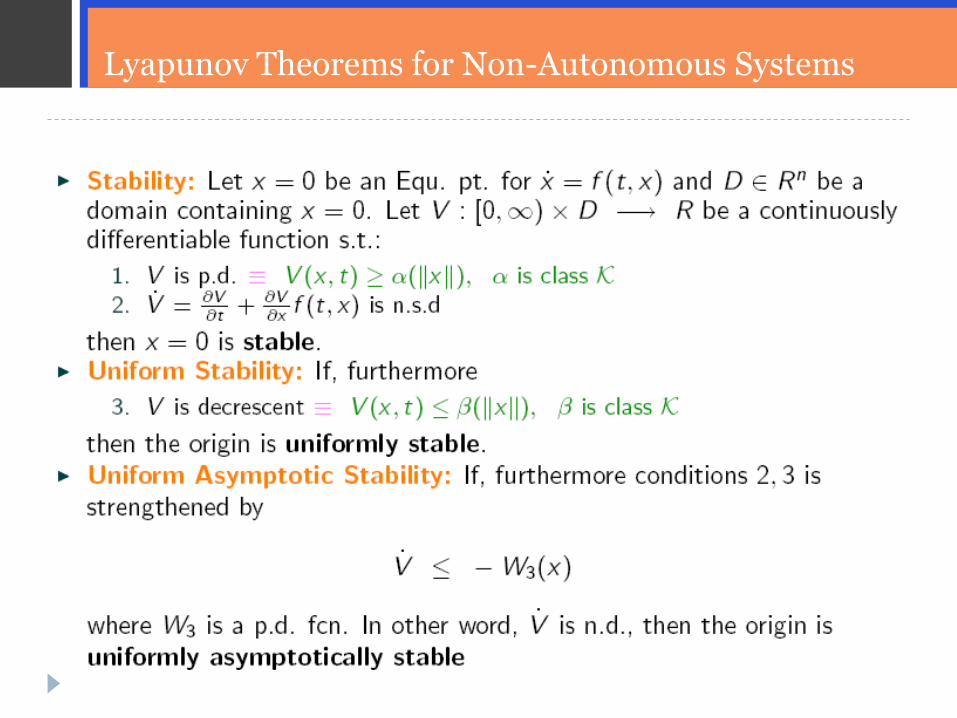
Lyapunov Theorems for Non-Autonomous Systems

Barbalat’s Lemma
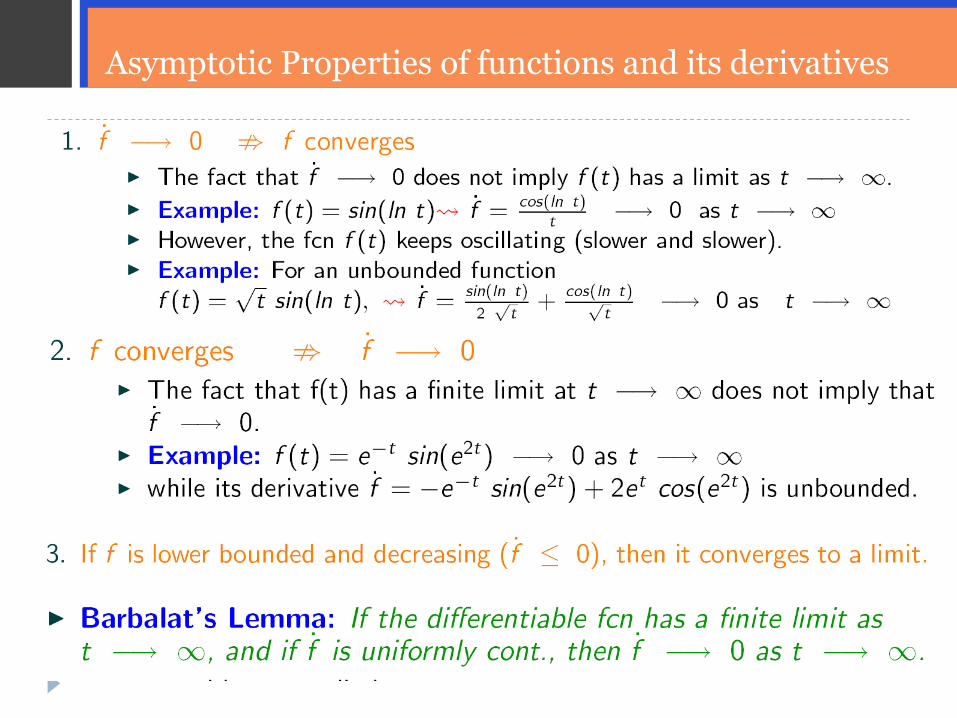
Asymptotic Properties of functions and its derivatives

Lyapunov-Like Lemma

Example continued…

Boundedness of Solutions

Uniformly Ultimately Bounded Stability

Adaptive Control
TEQIP Workshop on
Control Techniques and Applications IIT Kanpur, 19-23 September 2016
Dr. Shubhendu Bhasin
Department of Electrical Engineering IIT Delhi

Introduction
Historical Perspective
X-15

Basic Idea
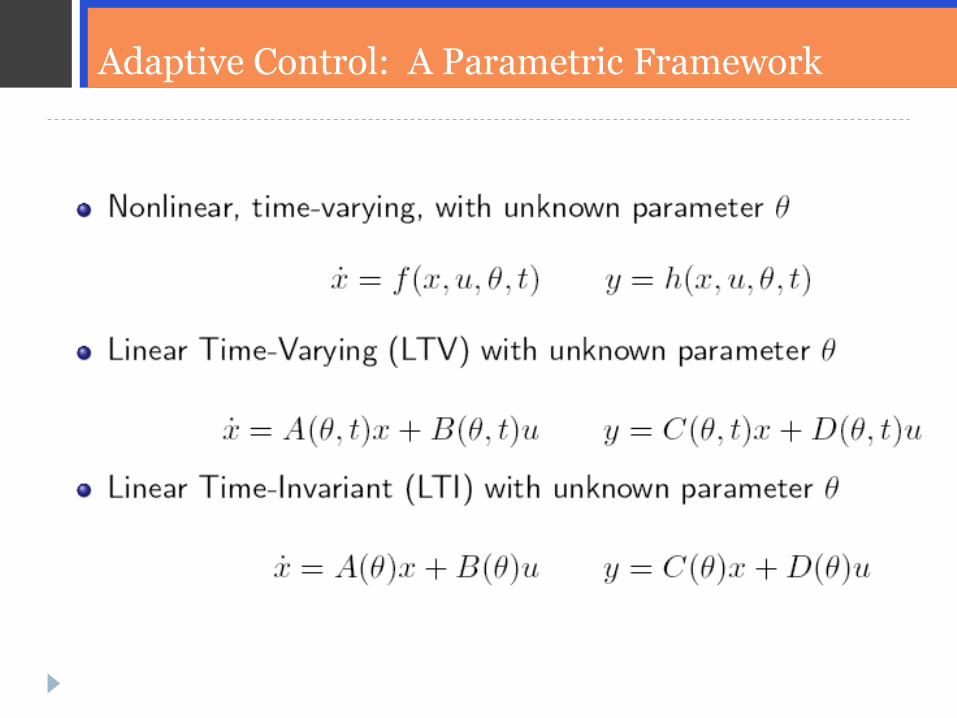
Adaptive Control: A Parametric Framework

Indirect and Direct Adaptive Control

Indirect and Direct Adaptive Control
Indirect Adaptive Control
Direct Adaptive Control
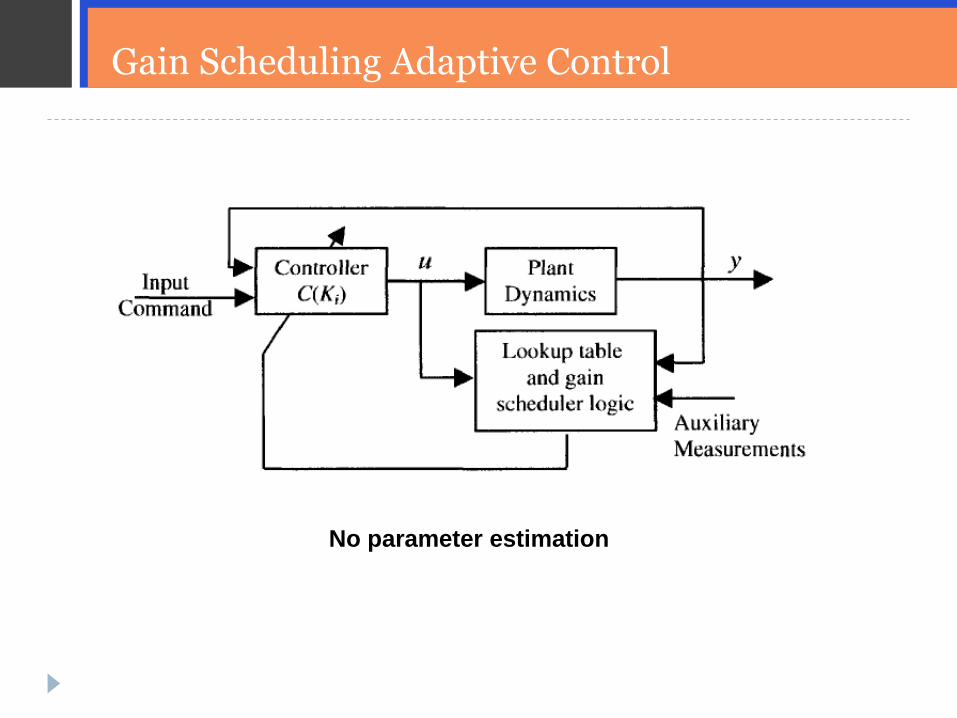
Gain Scheduling Adaptive Control
No parameter estimation

Model Reference Adaptive Control (MRAC)

Adaptive Control Topics
• Direct MRAC (SISO)
• Indirect MRAC (SISO)
• Lyapunov-Based Nonlinear Adaptive Control
• Parameter Convergence
• Parameter Drift
• Adaptive Backstepping