magnetic sensors: an overview · magnetic sensors: an overview ... magneto-optic effects bitter,...
TRANSCRIPT
Magnetic Sensors: An OverviewMagnetic Sensors: An Overview
Evangelos HristoforouLaboratory of Physical Metallurgy
National Technical University of Athens
IEEE Sensors 2003 Conference - Toronto, Canada

Outline
•Part A: Engineering Theory of Magnetism•A short introduction to magnetics•The magnetization process•Magnetic effects for engineering applications
•Part B: Sensors Based on Magnetic Materials•Sensing principles based on magnetic effects•Applications of sensors based on magnetic materials•Developing a sensor
IEEE Sensors 2003 Conference - Toronto, Canada

Part A:
Engineering Theory of Magnetism
IEEE Sensors 2003 Conference - Toronto, Canada

A short introduction to magnetics
• Paramagnetism
IEEE Sensors 2003 Conference - Toronto, Canada
∆H
M
• Diamagnetism
M
H
H=0 A/m
M
H>>0 A/m
MH=M - ∆M
χ>0
χ<0

Ferromagnetism
• Short range or exchangeinteraction results in spin-spin alignment of neighboring spins in some TM materials
• The spin-spin alignment results in the formation of the so called ferromagnetic domains
IEEE Sensors 2003 Conference - Toronto, Canada

Ferromagnetism
Magnetic domains cannot be extended to infinityDomain-domain interaction results in magnetic domains separated bymagnetic domain walls
IEEE Sensors 2003 Conference - Toronto, Canada
M=0
Orientation of dipoles in domain walls changes gradually
The Basic Mechanisms of Magnetization Process
• Domain wall motion:• Reversible• Irreversible
• Domain rotation:• Barkhausen jumps: irreversible effect• Small angle rotation: reversible effect
IEEE Sensors 2003 Conference - Toronto, Canada

Reversible Magnetic Domain MotionReversible Magnetic Domain Motion
M=0H=0
M>0
Msat
H
IEEE Sensors 2003 Conference - Toronto, Canada
H
M
Hs
Ms
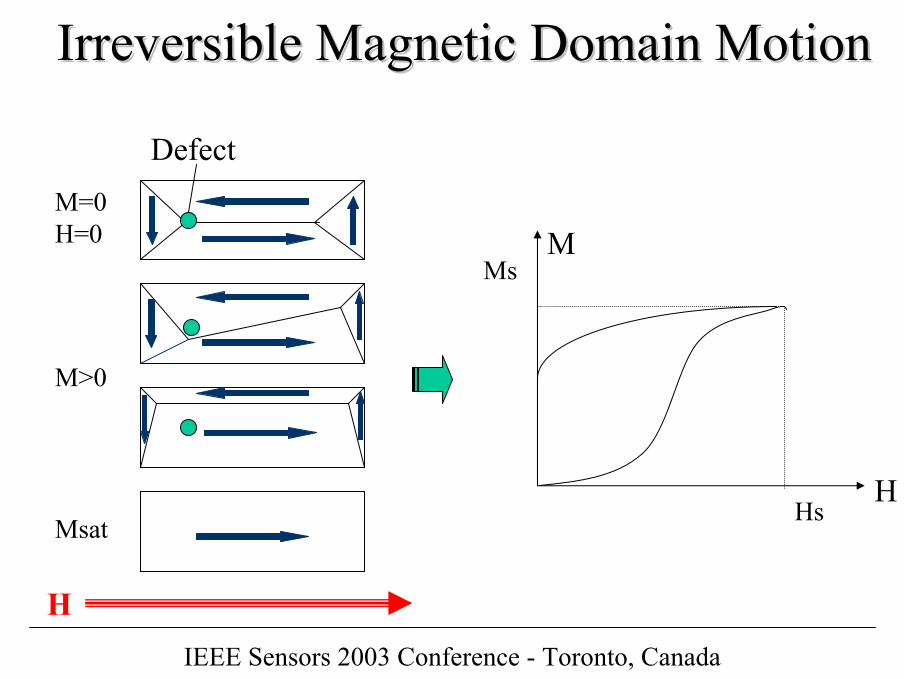
Irreversible Magnetic Domain MotionIrreversible Magnetic Domain Motion
IEEE Sensors 2003 Conference - Toronto, Canada
M=0H=0
M>0
Msat
H
Defect
H
M
Hs
Ms

Irreversible domain rotation:Irreversible domain rotation:BarkhausenBarkhausen JumpsJumps
IEEE Sensors 2003 Conference - Toronto, Canada
H
Easy axis A Easy axis B

Reversible Rotation of Domains
IEEE Sensors 2003 Conference - Toronto, Canada
Reversible magnetic domain rotation after the irreversible magnetisation process
H ∆H

The Magnetization Process
IEEE Sensors 2003 Conference - Toronto, Canada
H
M
Hs
Ms
• Virgin curve– Intrinsic magnetization
changes under external field– Main curve: three parts
• Domain wall motion• Barkhausen jumps• Rotation of magnetization
– Minor loops
• Saturation Ms– Completely oriented dipoles
H
Mo
MB
Ms

The Magnetization Process
• B-H loop– Saturation & back– Irreversible process – remanence– Coercive force (field) & coercive slope– Properties & dynamic properties: f, T, σ– Single phase systems have symmetric B-H loops– Minor loops: Inside the B-H loop– Size of B-H loops: hard - soft - semi– Non-single-phase materials may result in asymmetric B-H loop– Large Barkhausen Effect: an interesting property
IEEE Sensors 2003 Conference - Toronto, Canada

-1,1
0
1,1
-30 0 30
H
M/Ms
IEEE Sensors 2003 Conference - Toronto, Canada
B-H loopMain parameters: Temperature - Stress - Frequency
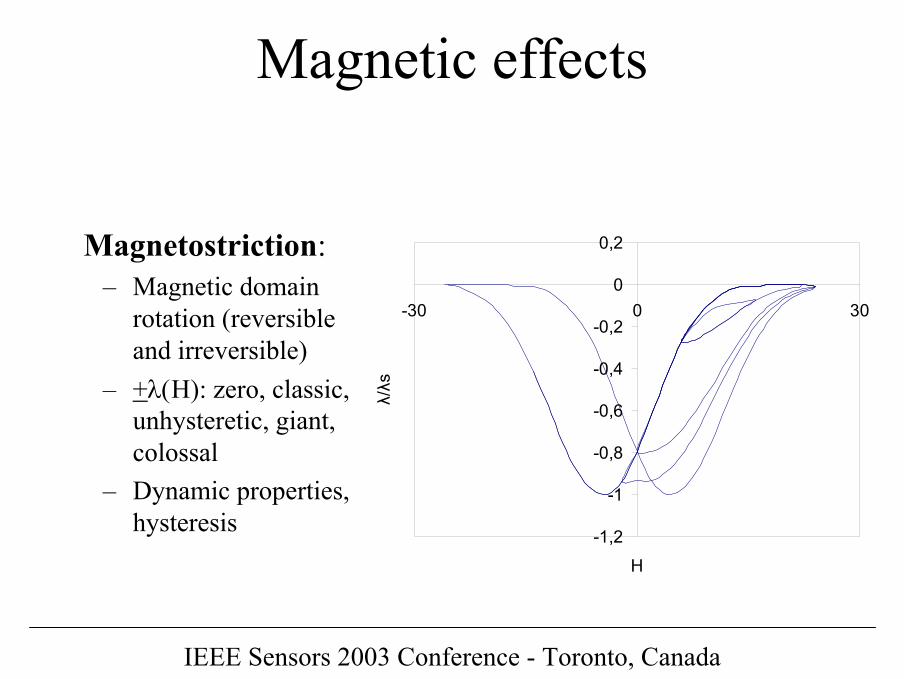
Magnetic effects
Magnetostriction:– Magnetic domain
rotation (reversible and irreversible)
– +λ(H): zero, classic,unhysteretic, giant, colossal
– Dynamic properties, hysteresis
IEEE Sensors 2003 Conference - Toronto, Canada
-1,2
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
-30 0 30
H
λ/λs

IEEE Sensors 2003 Conference - Toronto, Canada
Magnetic effects
Magnetostrictive Delay Lines:an application of the magnetostriction effect
Ie
Ie
MDL
MDL
Vo
a
a
Detectable change of flux density
Propagating elastic pulse
Generated microstrains
Magnetic effects
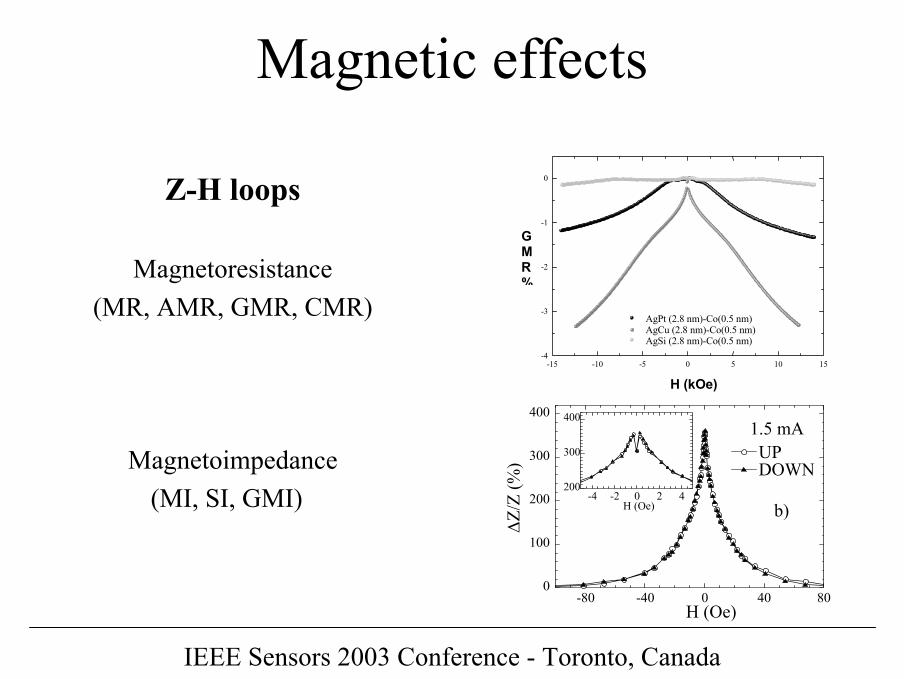
Z-H loops
Magnetoresistance(MR, AMR, GMR, CMR)
Magnetoimpedance(MI, SI, GMI)
IEEE Sensors 2003 Conference - Toronto, Canada
0
100
200
300
400
-80 -40 0 40 80
UPDOWN
∆Z/
Z (%
)
H (Oe)
1.5 mA
b)200
300
400
-4 -2 0 2 4H (Oe)
-15 -10 -5 0 5 10 15-4
-3
-2
-1
0
GMR%
H (kOe)
AgPt (2.8 nm)-Co(0.5 nm) AgCu (2.8 nm)-Co(0.5 nm) AgSi (2.8 nm)-Co(0.5 nm)

Magnetic effects
Inductive effects
Wiedeman effect
Domain wall nucleation& propagation
Classic set-ups(LVDT, fluxgates)
IEEE Sensors 2003 Conference - Toronto, Canada
I (t)exc
Vind
µ(t) B(t) B0
H0
iEXC
DA Vout
PSD
INT
2f
GEN
C1
C2
f
Icomp
vi

Magnetic effects
Magneto-optic effectsBitter, Kerr, Faraday effects
Use of M-O effectsCase study:displacement sensor
IEEE Sensors 2003 Conference - Toronto, Canada
H = Hs
H = 0
H = -Hs
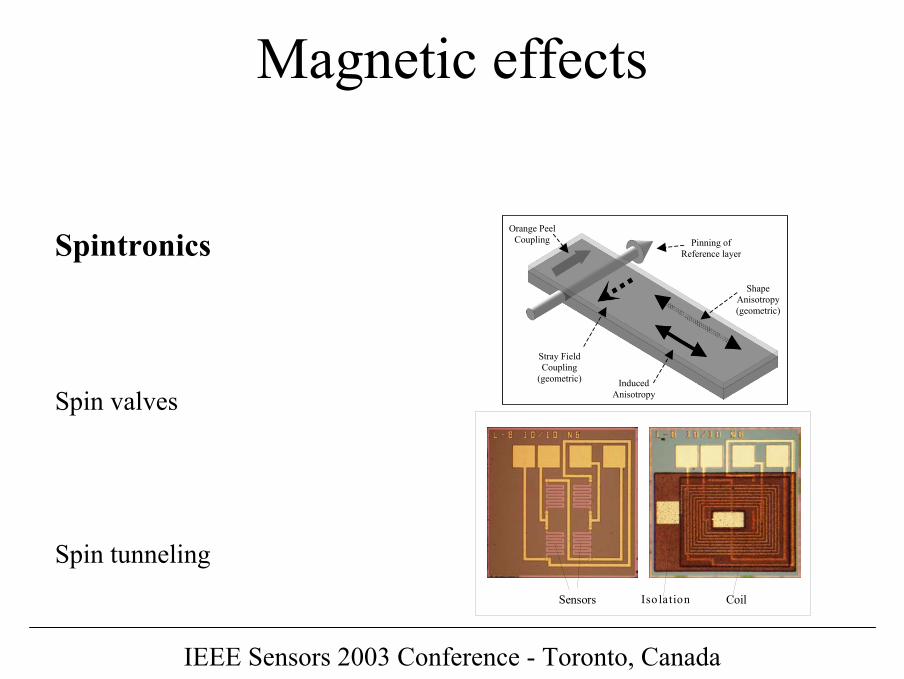
Magnetic effects
Spintronics
Spin valves
Spin tunneling
IEEE Sensors 2003 Conference - Toronto, Canada
Pinning ofReference layer
ShapeAnisotropy(geometric)
InducedAnisotropy
Orange PeelCoupling
Stray FieldCoupling
(geometric)
Sensors Iso lation Coil

Magnetic materials
BulkThin films
RQ (ribbons & wires)Particulate media
Composites
IEEE Sensors 2003 Conference - Toronto, Canada
Stress reliefInducing anisotropyTailoring B-λ-Z(H)Nanocrystallization
Micromechanics
Applications of magnetic materials
(Fe Co Ni)-(ETM)-(RE)-(NMM)

Applications of magnetic materials
Powertransformers
motorsactuators
Recordingrecording mediarecording heads
technology
Sensors
&
IEEE Sensors 2003 Conference - Toronto, Canada

Magnetic Sensors: An OverviewMagnetic Sensors: An Overview
Part B: SensorsPart B: Sensors
IEEE Sensors 2003 Conference - Toronto, Canada
Sensors
• Position
• Stress
• Field
• Position (tapes, digitizers, 3-d)• Dilatometry: LVDT, MDL• Speed & vibration: accelaration, …
• Load cells & torque meters• Pressure gauges and stress sensors• Force/pressure digitizers
• NDT applications• Recording• Compass
IEEE Sensors 2003 Conference - Toronto, Canada
Data from EMSA 2002, Athens, Greece

Position Sensors
• Position sensor based on the magnetostrictive delay line technique– Sensitivity: 5 µm; Uncertainty: + 10 µm– Drawbacks: ambient field sensitive– Characteristics are optimised by using amorphous alloys
IEEE Sensors 2003 Conference - Toronto, Canada
Ie
Pulse voltage output train of the in series connected search coils
Horizontally movable permanent Nd-Fe-B magnetMDL
-10
-5
0
5
10
0 10 20
Measuring length (mm)U
ncer
tain
ty (m
icro
ns)

Position Sensors(MDL technique cont.)
IEEE Sensors 2003 Conference - Toronto, Canada
ECT-MDL digitizerECT-MDL digitizer
Dilatometer and stress sensor Moving magnet sensor
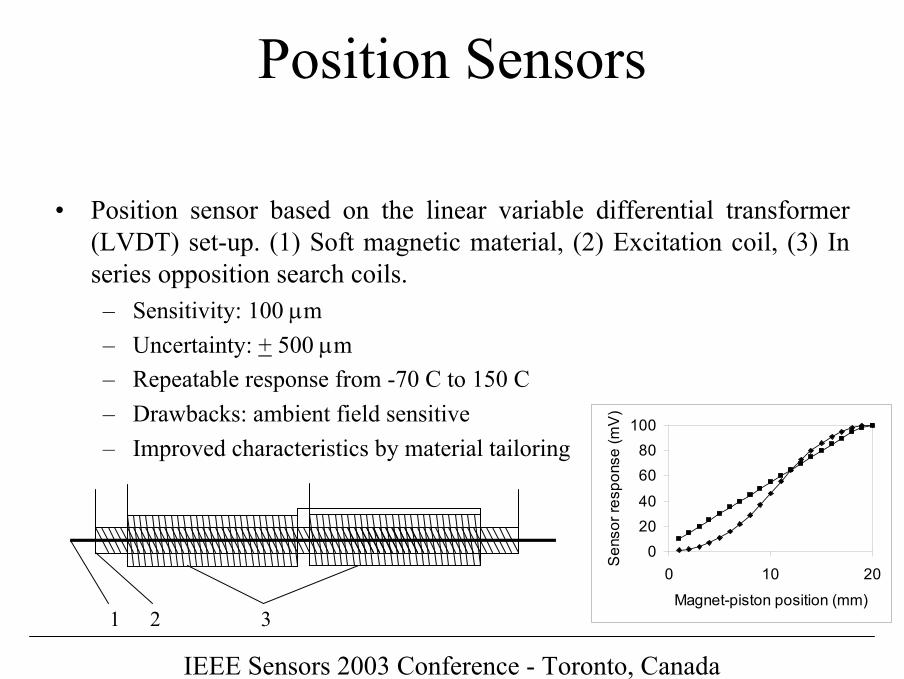
Position Sensors
• Position sensor based on the linear variable differential transformer (LVDT) set-up. (1) Soft magnetic material, (2) Excitation coil, (3) In series opposition search coils.– Sensitivity: 100 µm– Uncertainty: + 500 µm– Repeatable response from -70 C to 150 C– Drawbacks: ambient field sensitive– Improved characteristics by material tailoring
IEEE Sensors 2003 Conference - Toronto, Canada
1 2 3
02040
6080
100
0 10 20
Magnet-piston position (mm)S
enso
r res
pons
e (m
V)

Position SensorsPosition sensor based on an inductive principle
IEEE Sensors 2003 Conference - Toronto, Canada

Position Sensors
• Position sensor based on permanent magnet tape. (1) Permanent magnetic thin films, (2) Searching magnetic head.
– Sensitivity: 100 µm– Uncertainty: + 500 µm– Repeatable response from -70 C to 150 C– Drawbacks: ambient field sensitive– Characteristics can be improved by material tailoring
1 2
IEEE Sensors 2003 Conference - Toronto, Canada

Position Sensors
• Angular positioning sensor. (1) Radial permanent magnets in tooth arrangement, (2) Searching field sensor.
– Repeatable response from -70 C to 150 C– Great reproducibility allowed use in automobile industry (ABS)– Drawbacks: ambient field sensitive– Advantages: no dust sensitive
IEEE Sensors 2003 Conference - Toronto, Canada
1 2

Stress sensors
• Stress sensors based on inductive effects. (1) Soft magnetic element, (2) Inductive excitation coil.– More sensitive than strain gauges, if amorphous alloys are used– Good noise level after heat annealing– Good reproducibility after field annealing– Ambient field sensitive
IEEE Sensors 2003 Conference - Toronto, Canada
FF
1 2
0
20
40
60
80
0 50 100 150
Tensile stress (N/sq.mm)V
o (m
Vol
ts)

Stress sensors
Pressure, stress & torque sensors based on MDLs
IEEE Sensors 2003 Conference - Toronto, Canada
Ie Vo
MDL
Ie Vo
MDL0
1020
3040
5060
70
0 20 40 60
Applied force (gr)
Vo
(mV
olts)
01020304050607080
0 20 40 60
Applied force (gr)V
o (m
Vol
ts)

Stress Sensors
Thickness sensor based on a coilless MDL set-up
IEEE Sensors 2003 Conference - Toronto, Canada
0
2
4
6
8
10
10 30 50 70 90 110 130Pulsed current (mA)
Out
put V
olta
ge (m
V)
0
2
4
6
8
10
0 2 4 6 8 10 12 14 16 18 20Thickness (X100nm)
Out
put (
mV
)

Stress Sensors
• Magneto-inductive (MI) stress & torque sensors. (1) Sinusoidal excitation circuit, (2) MI element.
– Very sensitive, especially in high frequencies
IEEE Sensors 2003 Conference - Toronto, Canada
1
2
Vout
Vout
0
10
20
30
40
50
0 0,4 0,8 1,2 1,6
Applied force (X10N) or applied torsion (turns/m)
Vol
tage
out
put (
mV
) Torsion
Stress

Stress Sensors: Torque Meters
IEEE Sensors 2003 Conference - Toronto, Canada

Air-flux (A)
C3 C4
C1 C2
RibbonSignal coil
Cantilever
C3-C4
AC1-C2
Air-flux (A)
Air-flux Sensors Based on the Inverse Wiedeman Effect
IEEE Sensors 2003 Conference - Toronto, Canada

Ambient field dependence
• A serious drawback in mechanical sensors based on magnetics
• There are three solutions:– Two axes shielding by nanocrystalline thin
ribbons– Active compensation by induced field in some
cases (MDL and MI set-ups)– Smart field sensing
IEEE Sensors 2003 Conference - Toronto, Canada
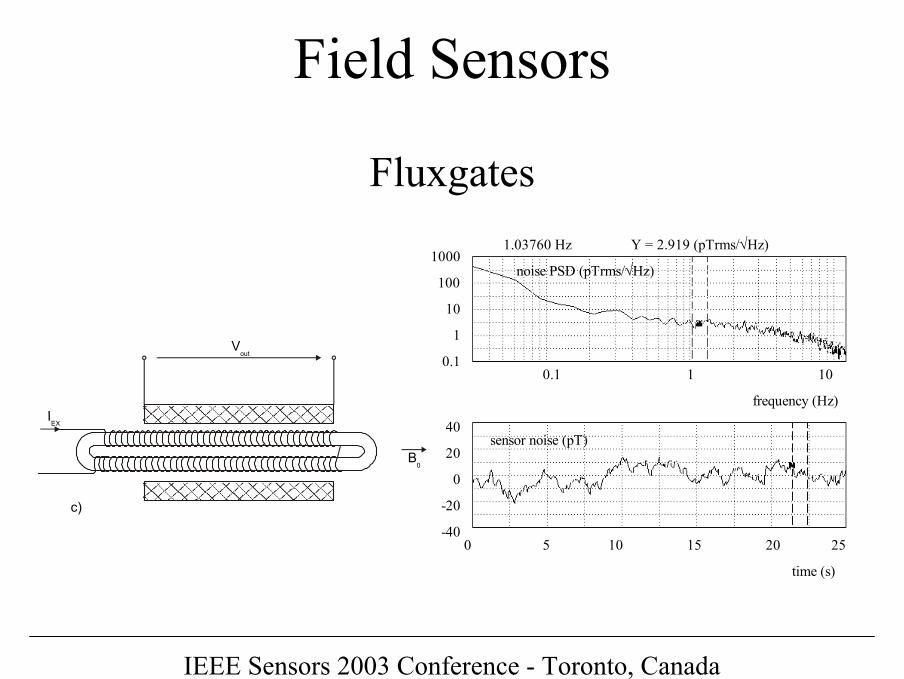
Field Sensors
Fluxgates
IEEE Sensors 2003 Conference - Toronto, Canada
IEX
Vout
B0
c)
noise PSD (pTrms/√Hz)
frequency (Hz)
1 100.10.1
1000
100
10
1
1.03760 Hz Y = 2.919 (pTrms/√Hz)
time (s)
0 5 10 15 20 25
sensor noise (pT)40
20
0
-20
-40

IEEE Sensors 2003 Conference - Toronto, Canada
Field Sensors
Magnetoresistive heads

IEEE Sensors 2003 Conference - Toronto, Canada
Field Sensors
MDLs
IeVo
MDL
-60
-40
-20
0
20
40
60
-160 -120 -80 -40 0 40 80 120 160
Applied field (A/m)
Vol
tage
out
put (
mV
)
IEEE Sensors 2003 Conference - Toronto, Canada
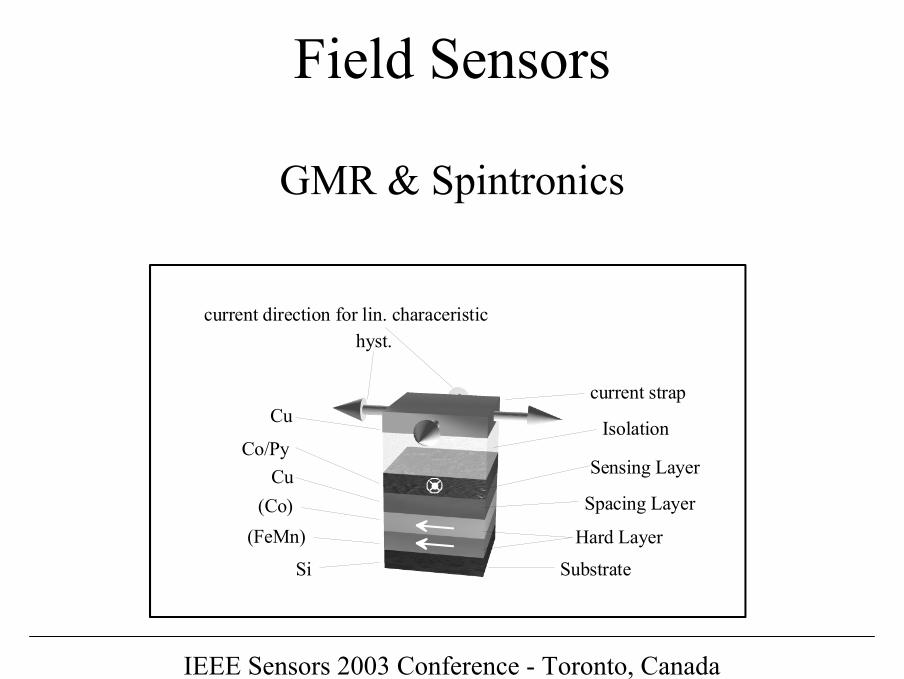
Field Sensors
GMR & Spintronics
SubstrateSi
Hard Layer
Spacing Layer
current strap
Isolation
Sensing Layer
(Co)(FeMn)
current direction for lin. characeristic
Cu
Cu
Co/Py
hyst.
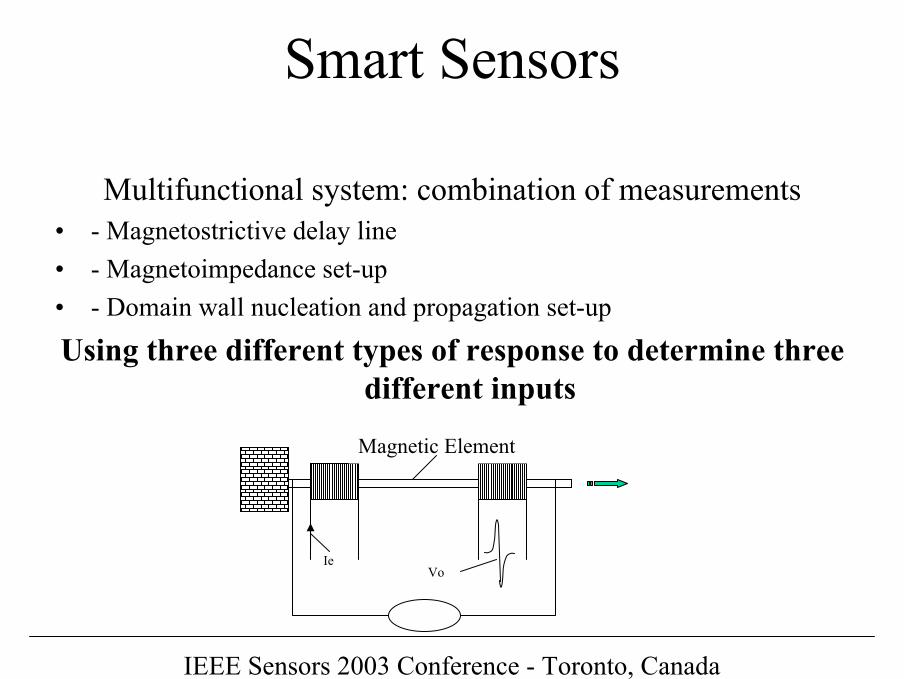
Smart Sensors
Multifunctional system: combination of measurements• - Magnetostrictive delay line• - Magnetoimpedance set-up• - Domain wall nucleation and propagation set-up
Using three different types of response to determine three different inputs
IEEE Sensors 2003 Conference - Toronto, Canada
IeVo
Magnetic Element

Sensor Applications
• Industrial– Sensors in production (piston position, stress monitoring, else)– Sensing systems for industry– NDT&E using field detection techniques
IEEE Sensors 2003 Conference - Toronto, Canada
Ie
MDL
Voltage pulses due to cracks on the magnetic surface
Under test magnetic surface

GMR Sensor Response
Shielded GMR Sensor Response
Hall Sensor Response
A Comparison Between Hall and GMR Sensors for NDT&E Inspection
IEEE Sensors 2003 Conference - Toronto, Canada

A Micro-Fluxgate Arrangement for NDT&E Inspections
IEEE Sensors 2003 Conference - Toronto, Canada
The 4 m-Fluxgate Sensors The Sensor
The Under Inspection Magnetic Anomaly

Sensor Applications
BiomedicalField monitoring, diabetes & blood monitoring, stress & strain monitoring,
cardiac measurements, artificial sphincters
IEEE Sensors 2003 Conference - Toronto, Canada

B (Tesla)
BiomagneticFields
Lung particles
Human Heart Skeletal muscles Fetal heartHuman eyeHuman Brain
Human Brain (evoked response)
SQUID System Noise level
Earth’s Field
Urban Noise
Car @ 50m
Screwdriver@ 5m
Transistor, IC chip @ 2m
Transistordie @ 1m
Electromagnetic Measurements in Bio-Engineering
GMI Measurements
IEEE Sensors 2003 Conference - Toronto, Canada
Sensor Applications• Military applications
– Gyroscopes (field)– Magnetic signatures (field)
• Automotive– Positioning & tracking (field)– Torque sensors (stress)– On-off- ABS rotation (positioning)
• Other applications– Environmental: E/M low frequency– Laboratory : characterization techniques
– Domestic : current path searcher
IEEE Sensors 2003 Conference - Toronto, Canada
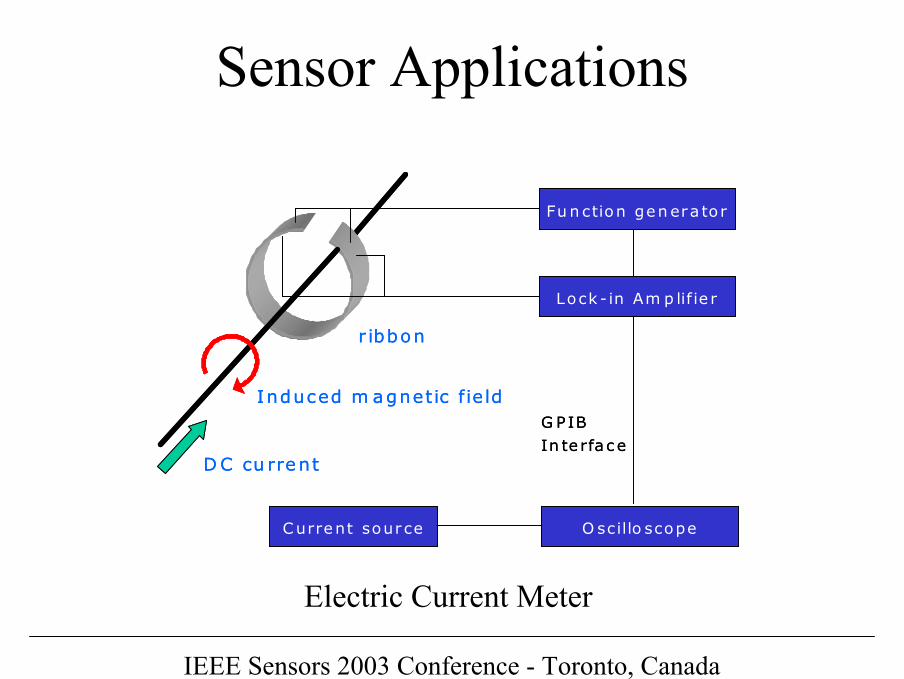
Sensor Applications
IEEE Sensors 2003 Conference - Toronto, Canada
Induced m agnetic f ie ld
D C cu rrent
r ibbon
Current source
Fu n ction gen era tor
Lock - in Am p lif ie r
O scillo scope
G PIB In te rfa c e
Induced m agnetic f ie ld
D C cu rrent
r ibbon
Current source
Fu n ction gen era tor
Lock - in Am p lif ie r
O scillo scope
G PIB In te rfa c e
Electric Current Meter

IEEE Sensors 2003 Conference - Toronto, Canada
AMR Bridge Micro-coils
Micromagnetic arrangements

Micromagnetic arrangements
IEEE Sensors 2003 Conference - Toronto, Canada
Developing a sensor
• Facing-up the problem– measurement– range – sensitivity– Field of use (application)– Parameters affecting
• Choice of sensing principle (effect)– Taking into account: range – sensitivity – parameters– Preliminary experiments: indicative results– Scheduling the experiment & and the sensor
IEEE Sensors 2003 Conference - Toronto, Canada

Sensor Development
• Sensing element : thin film, RQ, powder, else• Sensing device: the first prototype• Sensor electronics &calibration set-up• Measurements• Parametric effects: field, stress, temperature• Design of the sensor housing• Development of the sensor prototype• Calibration & Corrective actions• Final prototype & technical envelop
IEEE Sensors 2003 Conference - Toronto, Canada

Designing the future
Is miniaturization a future challenge?– Nanoscale resolution in writing & reading– Sensors with secondary standard uncertainty (nanotechnology?)– Smart multipurpose sensors– Parametric control (field-temperature- stress)– Silicon-chip magnetic sensors
Is there any key-parameter in designing magnetic sensors?– Hysteresis: the key point– Stability of B-λ-Z(H)– Parametric effects: field- stress-temperature
IEEE Sensors 2003 Conference - Toronto, Canada