maps. graphs on surfaces we are mainly interested in embeddings of graphs on surfaces: : g ! s. an...
TRANSCRIPT

Maps

Graphs on Surfaces
• We are mainly interested in embeddings of graphs on surfaces:
• : G ! S.• An embedding should be
differentiated from immersion.
• On the left we see some forbidden cases for embeddings.

Cellular (or 2-cell) embedding
• Embedding :G ! S is cellular (or 2-cell), if S \ (G) is a union of open disks.
• A 2-cell embedding is strong (or proper) if the closure of each open disk is a closed disk.
• Proposition: Only connected graphs admit 2-cell embeddings..
• On the left we see two embeddings of K4 in torus S1. The first one is cellular, the second ons is not!

2-Cell Embeddings and Maps
• 2-cell embeddings of graphs are also known as maps. There is a subtile difference in the point of view.
• In the former the emphasis is given to the graph while in the latter the emphasis is in the map, a structure, composed of vertices, edges and faces. Examples of maps include surfaces of polyhedra.
• Maps include different, equivalent, cryptomorphic purely combinatorial definitions that can be used as a foundation of a theory of maps that is independent of topology.

Genus of a Graph
• Let (G) denote the genus of a graph G. This parameter denotes the minimal integer k, such that G admits an embedding into an orientable surface of genus k.
• Note: (G) = 0 if and only if G is planar.

Euler Characteristics
• To each closed surface S we associate a number (S) called Euler characteristics of S.
• (Sg) = 2 – 2g, for orientable surface of genus g.
• (Nk) = 2 – k, for non-orientable surface of crosscap number (non-orientable genus) k.

Euler Formula
• Let G be a graph with v vertices, e edges cellularly embedded in surface S with f faces. Then
• v – e + f = (S).

Rotation Scheme• Let G be a connected graph with the vertex set V,
with arcs S and edges E. For each v 2 V define the set: S[v] = {s 2 S| i(s) = v}. Let and be mappings:
• : S ! S• : S !{-1,+1}.
• with the property:• Permutation acts cyclically on S[v], for each v 2 V.• (s) = (r(s)), for each s 2 S. [Hence is a voltage assignment.
In our case: (s) = (r(s))].
• The triple (G,,) is a called a rotation scheme, defining a 2-cell embedding of G into some surface.
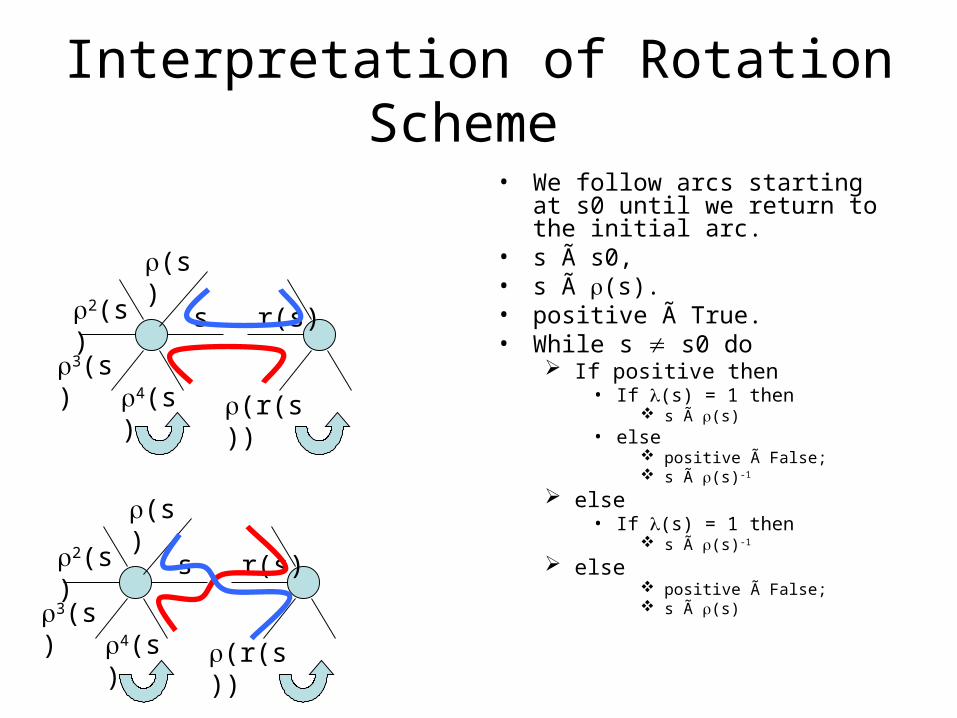
Interpretation of Rotation Scheme
• We follow arcs starting at s0 until we return to the initial arc.
• s à s0, • s à (s). • positive à True.• While s s0 do
If positive then • If (s) = 1 then
s à (s) • else
positive à False; s à (s)-1
else• If (s) = 1 then
s à (s)-1
else positive à False; s à (s)
2(s)
(s)
s r(s)
3(s)4(s) (r(s))
2(s)
(s)
s r(s)
3(s)4(s) (r(s))

Rotation Scheme and Rotation Projection
• Rotation scheme can be represented by rotation projection.
• Rotation can be reconstructed from the bottom drawing. Each arc s carries (s) = 1.

Example
• On the left we see the rotation projection of K4. The faces are triangles.
• There is no cycle with an odd nunber of “crosses”.
• V – E + F = 4 – 6 + 4 = 2.• The surface is a sphere!• Exercise: Analyse the
faces of the embedding if all crosses are removed from the figure on the left.

Main Fact
• Theorem: Any 2-cell embedding of a graph G into a surface S can be described by a rotation scheme (G,,). Furthermore, by face tracing algorithm the number of faces F can be computed yielding (S). Finally, S is non-orientable if and only if G contains a cycle
• C = (e1,e2, ... , ek) such that
• (C) := (e1) (e2) ... (ek) = -1

Combinatorial Theory of Maps
• There are several cryptomorphic definitions of maps (graphs on surfaces.)
• Rotation schemes represent such a tool.• Note that we start with a graph G and add
additional information (G,,) in order to describe its 2-cell embedding. In some closed surface.
• We may also start directly from maps or polyhedra.

• Let V,E,F be disjoint (finite) sets.
• µ V £ E £ F is a flag system. Here:
• V vertex set, • E edge set• F face set.
• A face that is a polygon with d sides, (a d-gon), consists of 2d flags (see figure on the left!)
Flag Systems
v e
f

Flag Systems are General
• Using flag systems we can describe general complexes such as books.
• Note the a 3-book contains a non-orientable Möbious strip.

Flag systems from 2-cell embeddings
• To a 2-cell embedding we associate a flag system as follows. Let V be the set of vertices, E, the set of edges and F the set of faces of the embedding. Define
• µ V £ E £ F as follows:
• (v,e,f) 2 if and only if v, e, and f are pairwise incident.

The 1-skeleton of a flag system.• Given a flag system µ V £ E £ F, we may study its projection to
the first two factors:• A = {(v,e)| (v,e,f) 2 }.• Define:• i:A ! V by i: (v,e) v and• Ve = {v 2 V| (v,e) 2 A}.• Assume |Ve| · 2, for each e 2 E.• We may define r:A ! A by:• r(v,e) = (w,e) if Ve = {v,w} and• r(v,e) = (v,e) if Ve = {v}.• The quadruple (V,A,i,r) is a pre-graph. It is called the 1-skeleton of
.• Given there is an easy test whether the 1-skeleton is indeed a
graph: for each e 2 E we must indeed have |Ve| = 2.

1-co-skeleton
• If we replace the role of V and F in a flag system µ V £ E £ F we obtain a 1-co-skeleton.
• We say that the skeleton and co-skeleton are dual graphs.

Homework
H1: If one of 1-skeleton is a graph is the 1-co-skeleton a graph too? Prove or find a counterexample.
Exercises
• N1. Determine the flag system describing the four-sided pyramid.
• N2. Determine the 1-skeleton and 1-co-skeleton for N1.
• N3. Define the notion of automorphism of a flag system . For the case N1 find the orbits of Aut .

When does a flag system define a surface?
• As we have seen in the case of a book we may have an edge belonging to more than two faces. This clearly violates the rule that each point on a surface has a neighborhood homeomorphic to an open disk.
• Therefore a necessary condition is:• Each for each flag (v,e,f) 2 there must exist a unique triple (v’,e’,f’) 2 V £
E £ F with v’ v, e’ e, f’ f such that (v’,e,f), (v,e’,f),(v,e,f’) 2 .• Another obvious condition is that the 1-skeleton must be connected.• However, a flag system satisfying these two conditions may still represent
more general spaces than surfaces.• It may represent a pseudosurface.• Let us define:
v = {(f,e)| (v,e,f) 2 }. e = {(v,f)|(v,e,f) 2 }. f = {(v,e}| (v,e,f) 2 }.
• Each of the three structures defined above can be represented as graph. More presicely, each of them is regular 2-valent graph.
• is a surface if and only if each graph v, e and f is connected.

Limits of flag systems
• Unfortunately, there are connected graphs whose 2-cell embeddings cannot be represnted by flag systems.
• Proposition. Let G be a connected graph. If G contains a loop or a bridge no 2-cell embedding of G can be described by flag systems.
• [A bridge is an edge whose removal disconnects the graph.]

Some limits of flag systems
• On the left we see K4 embedded in torus with one 4-gon and one 8-con.
• Green and red flag have all three matching components equal.
• This map cannot be described by flag systems.

Self-avoiding maps
• Theorem: A 2-cell embedding of G in some surface can be described by a flag system if an only if neither G nor its dual contains a loop.
• A map that satisifies the conditions of this theorem will be called self-avoiding.

Flags, from a different view-point.
• Let us forget about V,E, F for a moment. Let the set of flags be given.
• For instance, on the left, we see them as triangles.
• Define the flag graph ():
• V() = .• f ~ f’ if and only if
triangles have a common side.

From flags to flag graph.
First the vertices.

From flags to flag graph.
First the vertices.
Next: three kinds of new edges:
along the edges
across the edges.
across the angles.

Flag graphs for 2-cell embedded graphs.
Flag graph is:
- connected
- trivalent
- contains a 2-factor of form m C4.

Flag graphs for 2-cell embedded graphs.
A practical guide to the construction.
The first step when rectangles are placed on each edge is shown.

Yet another view to flag graphs.
• We may start with three involutions:• 0, 1, 2 : ! • 0
2 = 12 = 2
2 = 1, each fixed-poit free. • 0 2 = 2 0, also fixed-point free.• Each invoultion corresponds to a 1-factor. Together
they define a cubic graph: the flag graph ().• The group <0,1,2>, called monodromy group
must act transitively on . [This is eaquivalent to saying that () is connected.]
• These axioms define a (combinatorial) map on a surface.

Combinatorial Map.
• Combinatorial map is defined by three involutions satisfying the axioms from the previous slide.
• Orbits of <2,1> acting on define V.
• Orbits of <0,2> acting on define E.
• Orbits of <0,1> acting on define F.

Orientable Map
• Theorem: A map is orientable if and only if the flag graph is bipartite.

Unique Embedding
• Theorem (Whitney): Each 3-connected planar graph admits a unique embedding in the sphere.
• Theorem (Mani). Let Aut G be the group of automorphism of a 3-connectede planar graph G and let Aut M be the group of automorphisms of the corresponding map. Then Aut G = Aut M.

Example - Exercises
• On the left there is an embedding of Q3 on torus.
• N1: Determine the rotation scheme for this embedding.
• N2: Determine the flag graph for this embedding.

Example - Exercises
• On the left there is a different embedding of Q3 on torus.
• N1: Determine the rotation scheme for this embedding.
• N2: Determine the flag graph for this embedding.
• .

Levi graph of a map
• Levi graph of a map M has the vertex set:
• VM t EM t FM,
• Edges are determined by the sides of flags (as triangles).
• WARNING: The graph on the left is not simple!!

Characterisation
• Theorem: Levi graph of a map is simple if neither 1-skeleton nor 1-co-skeleton has a loop.
• Definition: A map M is simple,if and only if its Levi graph is simple.

Homework
• H1: Given Flag graph of a map M, determine whether M is simple! (Prove previous theorem)