matrix%equaons%of%ellipses%and% ellipsoids;%eigenvectors ...10/11/14 1...
TRANSCRIPT
10/11/14
1
Matrix Equa/ons of Ellipses and Ellipsoids; Eigenvectors and
Eigenvalues GG303, 2014 Lecture 16
10/11/14 1 GG303
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN I Main Topics A Elementary linear algebra rela/ons
B Equa/ons for an ellipse
C Equa/on of homogeneous deforma/on
D Eigenvalue/eigenvector equa/on
10/11/14 GG303 2

10/11/14
2
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
10/11/14 GG303 3
F = 2 00 0.5
⎡
⎣⎢
⎤
⎦⎥
F = 2 11 2
⎡
⎣⎢
⎤
⎦⎥
F = 1 11 0
⎡
⎣⎢
⎤
⎦⎥
Examples of 2D homogeneous deforma/on Note that the symmetry of the displacement
fields (or lack thereof) in the examples corresponds to the symmetry (or lack thereof) in the deforma/on gradient matrix [F]. What is a simple way to describe homogeneous
deforma/on that is geometrically meaningful? What is the geologic relevance?
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN II Elementary linear algebra rela/ons A Inverse [A]-‐1 of a real matrix A 1 [A][A]-‐1 = [A]-‐1[A] = [I], where [I] = iden/ty matrix (e.g., )
2 [A] and [A]-‐1 must be square nxn matrices 3 Inverse [A]-‐1 of a 2x2 matrix
4 Inverse [A]-‐1 of a 3x3 matrix also requires determinant |A| to be non-‐zero
10/11/14 GG303 4
A[ ] = a bc d
⎡
⎣⎢
⎤
⎦⎥ A[ ]−1 = 1
ad − bcd −b−c a
⎡
⎣⎢
⎤
⎦⎥ =
1A
d −b−c a
⎡
⎣⎢
⎤
⎦⎥
I[ ] = 1 00 1
⎡
⎣⎢
⎤
⎦⎥

10/11/14
3
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN II Elementary linear algebra rela/ons B Determinant |A| of a real matrix A 1 A number that provides scaling informa/on on a square matrix
2 Determinant of a 2x2 matrix
3 Determinant of a 3x3 matrix
10/11/14 GG303 5
A = a bc d
⎡
⎣⎢
⎤
⎦⎥, A = ad − bc
A =a b cd e fg h i
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥, A = a e f
h i− b
d fg i
+ c d eg h
Akin to: Cross product (an area) Scalar triple product (a volume)
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN II Elementary linear algebra rela/ons
C Transpose
D A matrix [A] is symmetric if [A] = [A]T
E Transpose of a matrix product
10/11/14 GG303 6
For A[ ] = a bc d
⎡⎣⎢
⎤⎦⎥, A[ ]T =
a cb d
⎡⎣⎢
⎤⎦⎥
If A[ ] = a bc d
⎡
⎣⎢
⎤
⎦⎥ and B[ ] = e f
g h
⎡
⎣⎢⎢
⎤
⎦⎥⎥, then A[ ]T = a c
b d⎡
⎣⎢
⎤
⎦⎥ and B[ ]T = e g
f h
⎡
⎣⎢⎢
⎤
⎦⎥⎥
A[ ] B[ ] = ae+ bg af + bhce+ dg cf + dh
⎡
⎣⎢⎢
⎤
⎦⎥⎥, A[ ] B[ ]⎡⎣ ⎤⎦
T=
ae+ bg ce+ dgaf + bh cf + dh
⎡
⎣⎢⎢
⎤
⎦⎥⎥
B[ ]T A[ ]T = ea + gb ec + gdfa + hb fc + hd
⎡
⎣⎢⎢
⎤
⎦⎥⎥= A[ ] B[ ]⎡⎣ ⎤⎦
T
This is true for any real nxn matrices

10/11/14
4
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN II Elementary linear algebra rela/ons F Representa/on of a dot product using matrix mul/plica/on and the matrix transpose
10/11/14 GG303 7
!a•!b = ax ,ay ,az • bx ,by ,bz = axbx + ayby + azbz
= ax ay az⎡⎣
⎤⎦
bxbybz
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
= a[ ]T b[ ]
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
III Equa/ons for an ellipse A Equa/on of a unit circle 1
2
3
10/11/14 GG303 8
x2 + y2 =!X •!X = 1
x y⎡⎣
⎤⎦
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= X[ ]T X[ ] = 1
x = cosθy = sinθ
10/11/14
5
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
III Equa/ons for an ellipse
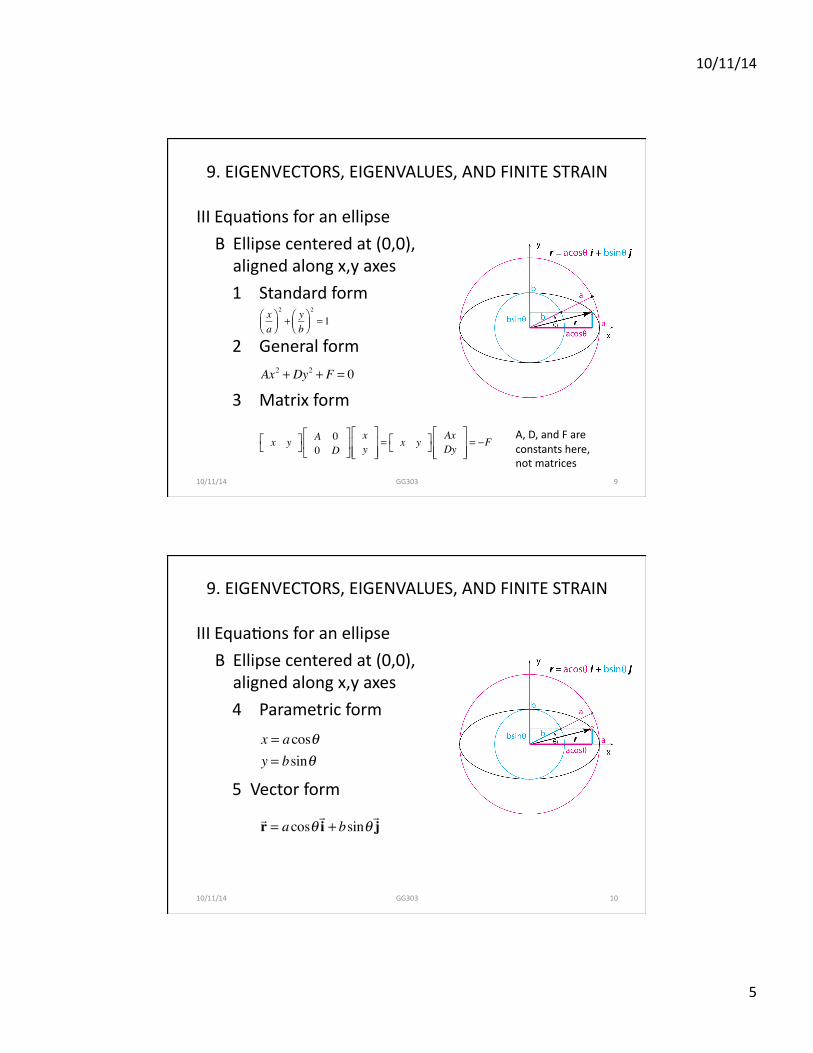
B Ellipse centered at (0,0), aligned along x,y axes
1 Standard form
2 General form
3 Matrix form
10/11/14 GG303 9
xa
⎛⎝⎜
⎞⎠⎟2
+ yb
⎛⎝⎜
⎞⎠⎟2
= 1
x y⎡⎣
⎤⎦
A 00 D
⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= x y⎡⎣
⎤⎦
AxDy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= −F
Ax2 + Dy2 + F = 0
A, D, and F are constants here, not matrices
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
III Equa/ons for an ellipse
B Ellipse centered at (0,0), aligned along x,y axes
4 Parametric form
5 Vector form
10/11/14 GG303 10
x = acosθy = bsinθ
!r = acosθ
!i + bsinθ
!j

10/11/14
6
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
III Equa/ons for an ellipse
C Ellipse centered at (0,0), arbitrary orienta/on
1 General form
provided 4AD > (B+C)2
2 Matrix form
10/11/14 GG303 11
x y⎡⎣
⎤⎦
A BC D
⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= x y⎡⎣
⎤⎦
Ax + ByCx + Dy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= −F
Ax2 + B +C( )xy + Dx2 + F = 0
A, B, C, D, and F are constants here, not matrices
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN IV Equa/on of homogeneous deforma/on A [X’] = [F][X]
B 2D
C 3D
10/11/14 GG303 12
d ′xd ′y
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
∂ ′x∂x
∂ ′x∂y
∂ ′y∂x
∂ ′y∂y
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
dxdy
⎡
⎣⎢⎢
⎤
⎦⎥⎥⇒ ′x
′y⎡
⎣⎢⎢
⎤
⎦⎥⎥= a b
c d⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
F ′x x F ′x y
F ′y x F ′y y
⎡
⎣⎢⎢
⎤
⎦⎥⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥
d ′xd ′yd ′z
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥=
∂ ′x∂x
∂ ′x∂y
∂ ′x∂z
∂ ′y∂x
∂ ′y∂y
∂ ′y∂z
∂ ′z∂x
∂ ′z∂y
∂ ′z∂z
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
dxdydz
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥⇒
′x′y′z
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥=
F ′x x F ′x y F ′x z
F ′y x F ′y y F ′y z
F ′z x F ′z y F ′z z
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
xyz
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
For homogeneous strain, the deriva/ves are uniform (constants) , and dx, dy can be small or large
10/11/14
7
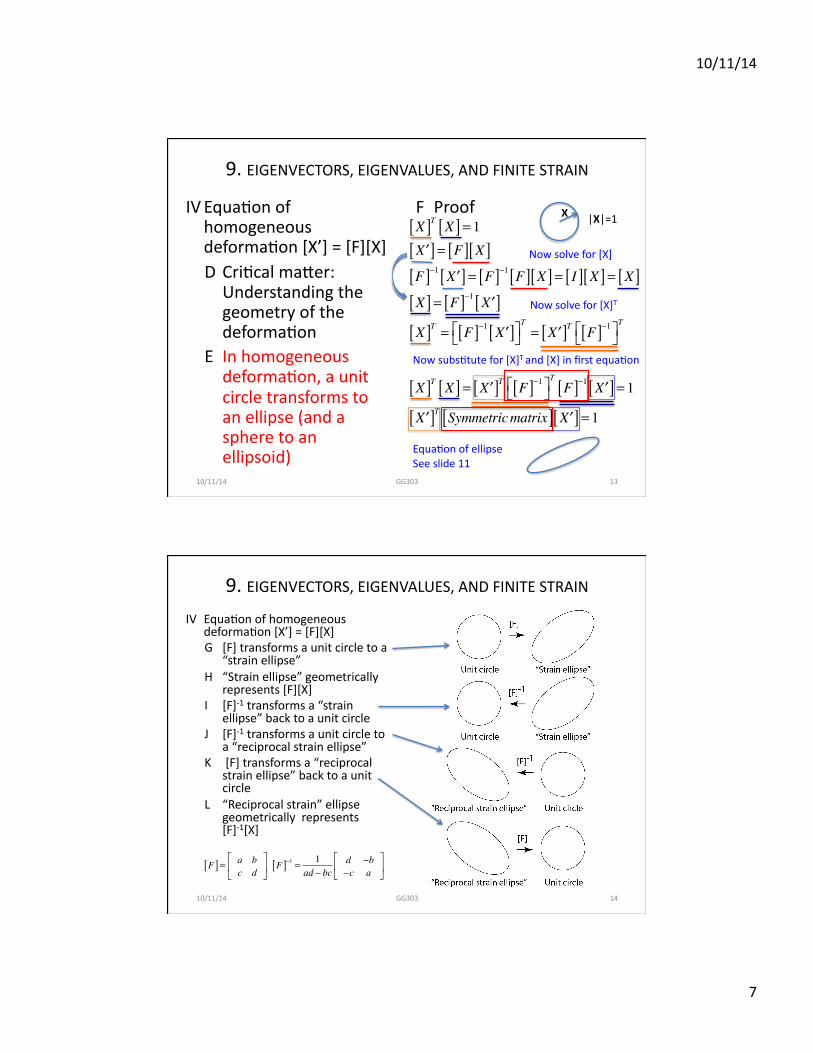
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN IV Equa/on of homogeneous deforma/on [X’] = [F][X] D Cri/cal maker: Understanding the geometry of the deforma/on
E In homogeneous deforma/on, a unit circle transforms to an ellipse (and a sphere to an ellipsoid)
F Proof
10/11/14 GG303 13
X[ ]T X[ ] = 1′X[ ] = F[ ] X[ ]
F[ ]−1 ′X[ ] = F[ ]−1 F[ ] X[ ] = I[ ] X[ ] = X[ ]X[ ] = F[ ]−1 ′X[ ]X[ ]T = F[ ]−1 ′X[ ]⎡⎣ ⎤⎦
T= ′X[ ]T F[ ]−1⎡⎣ ⎤⎦
T
X[ ]T X[ ] = ′X[ ]T F[ ]−1⎡⎣ ⎤⎦TF[ ]−1 ′X[ ] = 1
′X[ ]T Symmetricmatrix[ ] ′X[ ] = 1
X |X|=1
Now solve for [X]
Now solve for [X]T
Now subs/tute for [X]T and [X] in first equa/on
Equa/on of ellipse See slide 11
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN IV Equa/on of homogeneous
deforma/on [X’] = [F][X] G [F] transforms a unit circle to a
“strain ellipse” H “Strain ellipse” geometrically
represents [F][X] I [F]-‐1 transforms a “strain
ellipse” back to a unit circle J [F]-‐1 transforms a unit circle to
a “reciprocal strain ellipse” K [F] transforms a “reciprocal
strain ellipse” back to a unit circle
L “Reciprocal strain” ellipse geometrically represents [F]-‐1[X]
10/11/14 GG303 14
F[ ] = a bc d
⎡
⎣⎢
⎤
⎦⎥ F[ ]−1 = 1
ad − bcd −b−c a
⎡
⎣⎢
⎤
⎦⎥

10/11/14
8
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues A The eigenvalue matrix equa/on [A][X] = λ[X]
1 [A] is a (known) square matrix (nxn)
2 [X] is a non-‐zero direc/onal eigenvector (nx1) 3 λ is a number, an eigenvalue
4 λ[X] is a vector (nx1) parallel to [X] 5 [A][X] is a vector (nx1) parallel to [X]
10/11/14 GG303 15
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
A The eigenvalue matrix equa/on [A][X] = λ[X] (cont.) 6 The vectors [[A][X]], λ[X], and [X] share the same direc/on if [X] is an eigenvector
7 If [X] is a unit vector, λ is the length of [A][X] 8 Eigenvectors [Xi] have corresponding eigenvalues [λi], and vice-‐versa
9 In Matlab, [vec,val] = eig(A), finds eigenvectors (vec) and eigenvalues (val)
10/11/14 GG303 16

10/11/14
9
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) B Examples 1 Iden/ty matrix [I]
All vectors in the xy-‐plane maintain their orienta/on when operated on by the iden/ty matrix, so all vectors are eigenvectors, and all vectors maintain their length, so all eigenvalues of [I] equal 1. The eigenvectors are not uniquely determined but could be chosen to be perpendicular.
10/11/14 GG303 17
1 00 1
⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= x
y⎡
⎣⎢⎢
⎤
⎦⎥⎥= 1 x
y⎡
⎣⎢⎢
⎤
⎦⎥⎥
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
III Equa/ons for an ellipse B Examples (cont.) 2 Ellipse centered at (0,0),
aligned along x,y axes
[X’] = [F][X] Note that [F] is symmetric Unit vectors along the x-‐
and y-‐ axes don’t rotate and hence are eigenvectors
10/11/14 GG303 18
′x′y
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 2 0
0 1.5⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥
2 00 1.5
⎡
⎣⎢
⎤
⎦⎥10
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 2
0⎡
⎣⎢⎢
⎤
⎦⎥⎥= 2 1
0⎡
⎣⎢⎢
⎤
⎦⎥⎥
F[ ] X1[ ] = λ1 X1[ ]
2 00 1.5
⎡
⎣⎢
⎤
⎦⎥01
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 0
0.5⎡
⎣⎢⎢
⎤
⎦⎥⎥= 0.5 0
1⎡
⎣⎢⎢
⎤
⎦⎥⎥
F[ ] X2[ ] = λ2 X2[ ]
Eigenvectors Eigenvalues

10/11/14
10
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) B Examples (cont.)
3 A matrix for rota/ons in the xy plane
All non-‐zero real vectors rotate; a 2D rota/on matrix has no real eigenvectors and hence no real eigenvalues
10/11/14 GG303 19
cosω sinω−sinω cosω
⎡
⎣⎢
⎤
⎦⎥
xy
⎡
⎣⎢⎢
⎤
⎦⎥⎥= λ x
y⎡
⎣⎢⎢
⎤
⎦⎥⎥
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) B Examples (cont.) 4 A 3D rota/on matrix a The only unit vector that is not rotated is along the axis of rota/on
b The real eigenvector of a 3D rota/on matrix gives the orienta/on of the axis of rota/on
c A rota/on does not change the length of vectors, so the real eigenvalue equals 1
10/11/14 GG303 20

10/11/14
11
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) B Examples (cont.)
5
10/11/14 GG303 21
A = 0 22 0
⎡
⎣⎢
⎤
⎦⎥
A2 2
2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥= 0 2
2 0⎡
⎣⎢
⎤
⎦⎥
2 2
2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥= 2
2
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 2
2 2
2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
A2 2
− 2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥= 0 2
2 0⎡
⎣⎢
⎤
⎦⎥
2 2
− 2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥= − 2
2
⎡
⎣⎢⎢
⎤
⎦⎥⎥= −2
2 2
− 2 2
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
Eigenvectors
Eigenvalues
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) B Examples (cont.)
6
10/11/14 GG303 22
A = 9 33 1
⎡
⎣⎢
⎤
⎦⎥
A −3 0.1− 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 9 3
3 1⎡
⎣⎢
⎤
⎦⎥
−3 0.1− 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥= −30 0.1
−10 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 10 −3 0.1
− 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Eigenvectors
Eigenvalues
A 0.1−3 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 9 3
3 1⎡
⎣⎢
⎤
⎦⎥
0.1−3 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥= 0
0⎡
⎣⎢
⎤
⎦⎥ = 0
0.1−3 0.1
⎡
⎣⎢⎢
⎤
⎦⎥⎥

10/11/14
12
9. EIGENVECTORS, EIGENVALUES, AND FINITE STRAIN
V Eigenvectors and eigenvalues (cont.) C We will use eigenvectors and eigenvalues to find the axes of all strain ellipses and strain ellipsoids in Lab 9.
10/11/14 GG303 23