may 7 2004meditate1 taipan autonomous underwater vehicle bruno jouvencel professor university of...
TRANSCRIPT

May 7 2004 Meditate 1
TAIPANAutonomous Underwater Vehicle
Bruno Jouvencel
Professor University of Montpellier
Underwater robotics

May 7 2004 Meditate 2
OUTLINE
• First part : our experience in AUV
• Second part : new prototype of AUV for MEDITATE project
• Third part: WP3

May 7 2004 Meditate 3
LIRMM - CNRS
• Laboratory – Computing science
– Robotics
– Micro-electronics systems
Staff 260 persons– Researchers 110
– Technical staff about 30
– About 120 invited researchers, postdoc, PhD students

May 7 2004 Meditate 4
Underwater Robotics TEAMfor MEDITATE
• Bruno Jouvencel Professor
• Olivier Strauss : Assistant Professor
• Michel Benoit : Research Engineer
• Jean Mathias Spiewak : PhD Student
• Lionel Lapierre postdoc from september 2004

May 7 2004 Meditate 5
TAIPAN One

May 7 2004 Meditate 6
Video of TAIPAN
QuickTime™ et undécompresseur codec YUV420sont requis pour visionner cette image.

May 7 2004 Meditate 7
FIRST Scientific Mission
• GOATS : Generic Oceanographic Array Technology System: (scientific program of NATO)
• For TAIPAN:– First field deployment with a real scientific goal– Role : to provide the modelers with CTD data
along trajectories in Biodola bay (Elba)

May 7 2004 Meditate 8
Scientific Sensors
CTD sensor
PositioningTransponder for Trackpoint 2

May 7 2004 Meditate 9
Mission Interface

May 7 2004 Meditate 10
Vehicle Control
0.5 1 1.5 2 2.5 3
50
100
150
200
250
300
350
heading control
minutes
deg
0.5 1 1.5 2 2.5 3
0
2
4
6
8
10
depth control
minutes
meters

May 7 2004 Meditate 11
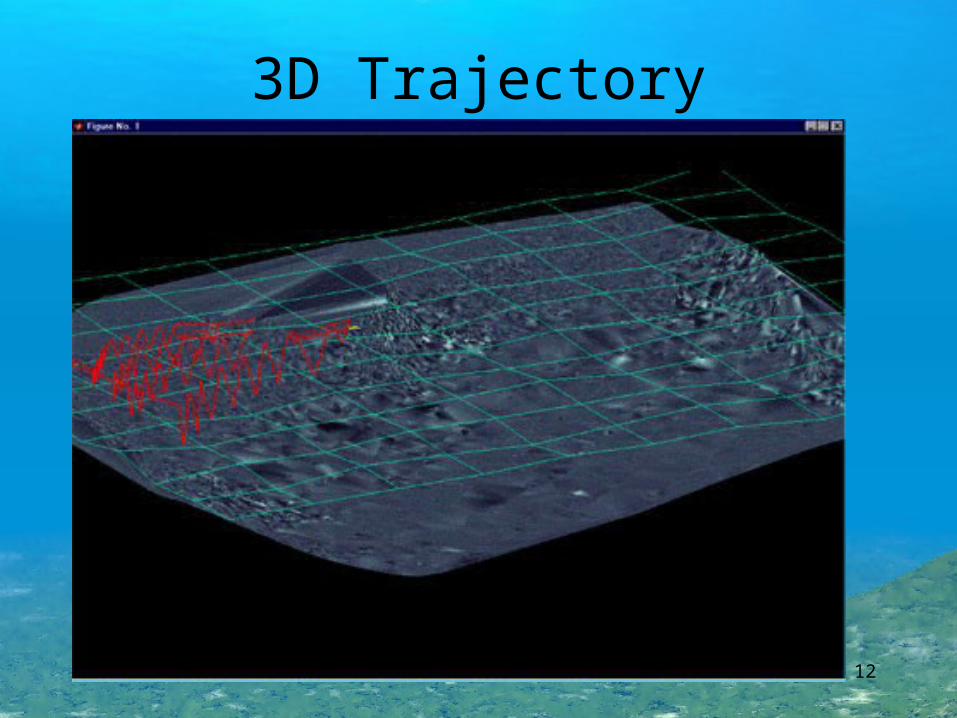
CTD Mapping with Taipan
May 7 2004 Meditate 12
3D Trajectory

May 7 2004 Meditate 13
Thau Lagoon : Spring LA-VISE
Real trajectories
Bathymetric measurements

May 7 2004 Meditate 14
Thau Lagoon LA-VISE
Real trajectories
Bathymetric measurements

May 7 2004 Meditate 15
Presentation of a new Autonomous Underwater Vehicle
TAIPAN 2
Jean Mathias Spiewak
PhD Student

May 7 2004 Meditate 16
Overview of AUV Taipan 2

May 7 2004 Meditate 17
Topsolid view of Taipan 2

May 7 2004 Meditate 18
• Two onboard computers : navigation -- perception • Additional card dedicated to :
A/D conversions, RS232 serial communications, logical I/Os and PWM signal generation

May 7 2004 Meditate 19
To compute displacement three-axis inclinometer, three-axis magnetometer, yaw rate and pitch rate gyrometers and accelerometers two pressure sensors, loch doppler
For dead reckoning Acoustical range meter GPS receiver
For communication UHF radio link Wifi link
May 7 2004 Meditate 20
Scientific sensor payload
• CTD sensor
• Acoustical Doppler Current Profiler
• Side Scan Sonar
• CCD Camera
• Acoustical sensors (obstacle avoidance)

May 7 2004 Meditate 21
CTD Sensor

May 7 2004 Meditate 22
Side Scan Sonar picture
• La Vise fresh underwater spring : 30 meter depth
• starboard and port side pictures

May 7 2004 Meditate 23

May 7 2004 Meditate 24
Work Package 3

May 7 2004 Meditate 25
WP3• Task A.1. Define the pay-load of
vehicle. – Selection of sensors (Conductivity
Temperature Depth, loch, sonar, doppler, GPS…)
– the determination of the best positioning of sensors according the desired precision on measurements.

May 7 2004 Meditate 26
WP3– Task A.2. Performances of the AUV.
– Error on the trajectory of the vehicle, – The energy autonomy, – And so on.
– Task A.3. Protocol to define for scientist missions:
• The interface man machine has to be developed as well as the facility of using the files in a compatible format with the GIS that will be used in the WP1 and WP4.
May 7 2004 Meditate 27
WP3– Task A. 4. Development of vehicle and
sensors integration– Task A. 5. Study of fusion data method
to build a 3D representation of spring based on the lateral sonar data.
– Task A. 6. Test of vehicle– Task A. 7. Submarine springs survey– Task A.8. Feasibility study concerning
the use of the AUV in the Syrian test site,

May 7 2004 Meditate 28
Deliverables
• Vehicle’s specifications
• Interface man machine
• Data fusion méthod
• Vehicle test

May 7 2004 Meditate 29
Milestones expected results
• Month 0 +7 : interface man machine
• Month 0 +11 : demonstrator of data fusion
• Month 0 + 10 start of submarine springs survey