mecanica teoretic cinematica - hidrotehnica · pdf fileinstalaţia de irigat, iar mai...
TRANSCRIPT

ANDREI VASILESCU
MECANICA TEORETICĂ
CINEMATICA
CURS ŞI APLICAŢII
EDITURA CONSPRESS
BUCUREŞTI
2003

Referent ştiinţific: Prof.dr.ing. Mihail ALEXANDRESCU Redactor responsabil şi consilier editorial: Vasile TĂMÂIAN Tehnoredactare computerizată: Conf.dr.ing. Andrei VASILESCU
Colecţia Tehnică
CONSPRESS B-dul Lacul Tei 124, sector 2, Bucureşti
Tel: (021) 242 27 19/183 Fax: + 40-21-242 07 81
e-mail: [email protected]
Editura CONSPRESS aparţine UNIVERSITĂŢII TEHNICE DE CONSTRUCŢII BUCUREŞTI
Descrierea CIP a Bibliotecii Naţionale a României VASILESCU, ANDREI Mecanică teoretică: cinematica: curs şi aplicaţii / Andrei Vasilescu, – Bucureşti: Conspress, 2003 Bibliogr. ISBN 973-8165-42-3 531.1(075.8)

Introducere
7
INTRODUCERE Mecanica teoretică este o disciplină obligatorie în toate universităţile cu profil tehnic din întreaga lume, deoarece se situează la baza pregătirii ştiinţifice a viitorilor ingineri. Cinematica reprezintă una din cele trei diviziuni ale Mecanicii teoretice, împreună cu statica şi dinamica. Împărţirea Mecanicii teoretice în diviziuni este o chestiune convenţională, bazată pe necesitatea însuşirii graduale a noţiunilor specifice, dar susţinută şi de dezvoltarea istorică a mecanicii. Începuturile mecanicii se regăsesc în istoria civilizaţiilor antice, iar progresul mecanicii se produce simultan cu progresul civilizaţiei umane. Din epoca culturii antice greceşti, aceasta fiind sub o influenţă egipto-asiro-babiloneană în domeniul mecanicii, se găsesc numeroase exemple cum ar fi "maşinile simple" care la început au fost : pârghia, planul înclinat, roata primitivă, scripeţii, troliul, şurubul, inclusiv şurubul (lui Arhimede) pentru instalaţia de irigat, iar mai târziu dispozitivele hidraulice şi pneumatice. Pompa de apa, pompa de incendiu şi orga hidraulică au fost inventate după relatările lui Vitruviu, de Ctesibios (180 î.Hr.) – fondatorul şcolii de mecanică din Alexandria [6]. Este limpede că toate acestea au fost realizate în primul rând pe baza unor îndelungate experienţe, dar au fost făcute şi calcule elementare aritmetice şi geometrice. Statica a fost prima dintre disciplinile mecanice care a apărut din nevoia de a uşura unele munci grele cum ar fi cele din domeniul construcţiilor şi mai precis, al "lucrărilor de artă" (poduri, apeducte, etc.). Timp de aproape două milenii mecanica a fost aproape sinonimă cu statica. Totuşi, evoluţia mecanicii cunoaşte de la început două direcţii : ♦ dinamica care încerca să definească sub aspect filozofic noţiunile
fundamentale ale mecanicii şi să studieze mişcarea, şi ♦ statica, care având un profund caracter aplicativ, încerca să fundamenteze
teoria maşinilor simple şi să răspundă problemelor tehnice privind echilibrul corpurilor.
Cinematica privită ca diviziune a mecanicii, s-a consolidat din punctul de vedere al istoriei ştiinţelor, de relativ puţină vreme. Studii specifice cinematicii pot fi amintite din epoca renascentistă, începând cu Leonardo da VINCI (1452-1519), Galilelo GALILEI (1564-1642) şi ulterior cu cele ale lui Isaac NEWTON (1643-1727).

Cinematica A. Vasilescu
8
Jean le Rond d'ALEMBERT (1717-1783) a subliniat importanţa intrinsecă a studiului legilor de mişcare ale corpurilor, iar André-Marie AMPÈRE (1775-1836) a fost primul care a arătat necesitatea introducerii unei teorii a studiului proprietăţilor geometrice ale corpurilor în mişcare, teorie care să aibă numele de cinematică (1834) şi să preceadă dinamica. Neîndoielnic, savantul care a avut contribuţiile majore la fundamentarea cinematicii, a fost Leonhard EULER (1707-1783) prin studiul mişcării spaţiale a solidului rigid şi al mişcării rigidului cu punct fix. Mai poate fi amintit şi matematicianul francez Michel de CHASLES (1793-1880) care a formulat teoria centrului instantaneu de rotaţie, în mişcarea plană a rigidului. Apariţia lucrării "Tratat asupra cinematicii pure" scrisă de M. RESAL în anul 1862, fixează definitiv cinematica în cadrul Mecanicii teoretice cu statut de ştiinţă distinctă [3].
Lucrarea de faţă se constituie în viziunea autorului, ca un manual universitar necesar studenţilor pentru a înţelege şi aprofunda noţiunile din cinematică, absolut necesare continuării studiului pentru cea de-a treia diviziune a Mecanicii teoretice - dinamica, precum şi abordării Mecanicii analitice cu care se va încheia "cursul de Mecanică". Nivelul manualului este adresat unor studenţi care au învăţat şi continuă învăţarea analizei matematice şi care au urmat un curs de fizică în liceu. Cum primul şi al doilea an de studiu din universitate, perioadă în care se predă şi cursul de Mecanică sunt cei mai dificili din cauza trecerii de la învăţământul liceeal la cel universitar, autorul a optat pentru fixarea elementelor prezentate prin aplicaţii specifice şi exemple pe tot parcursul cursului. Modul de organizare al prezentărilor este conceput cu scopul de a forma studentului o gândire sistematică şi totodată, independentă şi creatoare. În sprijinul acestei idei, fiecare capitol se încheie cu întrebări de autocontrol şi recapitularea formulelor esenţiale. O serie de îndrumări metodice şi prezentarea unor probleme rezolvate vin în ajutorul studentului pentru pregătirea finală a examenului. Aceasta nu înseamnă diminuarea studiului individual de-a lungul semestrului, ci tocmai un îndemn pentru continuitatea şi ritmicitatea muncii independente, completate cu activitatea de rezolvare a problemelor din timpul orelor de seminar şi prezentarea temelor săptămânale, la disciplina mecanică. Revederea unor părţi importante din cărţile de fizică de liceu este obligatorie pentru studentul care are dificultăţi în înţelegerea unor părţi din acest curs, chiar dacă a citit şi recitit textul. În al doilea rând, profesorii titulari ai disciplinei sunt cea mai bună sursă de răspunsuri şi pot clarifica cel mai eficient neînţelegerile apărute. Autorul.

Capitolul 1 Cinematica punctului
9
CCaappiittoolluull 11 CCIINNEEMMAATTIICCAA PPUUNNCCTTUULLUUII
CUVINTE CHEIE
Mişcare. Reper. Sistem de referinţă. Grad de libertate. Traiectorie. Ecuaţia orară a mişcării. Viteză. Acceleraţie. Viteză şi acceleraţie unghiulară. Hodograf. Viteză areolară. Clasificarea mişcărilor. Cinematica punctului în coordonate carteziene. Cinematica punctului în coordonate cilindrice. Cinematica punctului în triedrul lui Frenet. Mişcări particulare : rectilinie, circulară, uniformă pe elicea circulară, pe cicloidă.
SPIRALA LOGARITMICA
-101234
-2 0 2 4 6 8 10 12
m
m
v0

Cinematica A. Vasilescu 10
NNoottaaţţiiii
A arie, surprafaţă a acceleraţie aν acceleraţie normală aτ acceleraţie tangenţială g acceleraţie gravitaţională R, r rază, rază polară r, θ coordonate polare s coordonată curbilinie t timp v viteză x, y, z coordonate carteziene
, ,x y z proiecţiile ortogonale ale vitezei , ,x y z proiecţiile ortogonale ale acceleraţiei
α, β, γ unghiuri directoare ,ε θ acceleraţie unghiulară
π 3,1416 θ unghi (de rotaţie) ρ rază de curbură
,ω θ viteză unghiulară
,AB v mărimi vectoriale
C constantă de integrare , ,i j k versorii axelor carteziane
r vector de poziţie , ,τ ν β versorii în triedrul lui Frenet
, ,n kρ versorii axelor sistemului cilindric
Ω viteză areolară

Cinematica punctului Generalităţi
11
1.1. GENERALITĂŢI
Definiţie Cinematica este partea Mecanicii care studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi acţiunile care se exercită asupra lor.
Mişcarea este o noţiune care cuprinde în sfera ei următoarele elemente : • corpul sau mobilul (particula sau punctul) care efectuează mişcarea; • mediul sau spaţiul în care se desfăşoară mişcarea; • reperul în raport cu care se studiază mişcarea. Mişcarea unui punct sau corp este raportată la un alt corp. Acesta din urmă se numeşte reper.
Definiţie Prin sistem de referinţă se înţelege ansamblul format din reper, sistem de coordonate asociat reperului şi cronometre sincronizate pentru măsurarea timpului în care se desfăşoară mişcarea.
Observaţii : • Atunci când reperul este considerat fix (inerţial) mişcarea se numeşte
absolută, iar când reperul este considerat mobil mişcarea se numeşte relativă. • Se face convenţia ca elementele mişcării absolute să se utilizeaze fără
atributul „absolut“ şi numai în contextul existenţei mişcării relative să se utilizeze atributele de „absolut“ şi „relativ“.
• Studiind numai aspectul mişcărilor din punct de vedere geometric, cinematica mai este şi denumită geometria mişcărilor. Prin urmare, în cinematică se folosesc numai mărimile fundamentale de spaţiu şi timp.
Cunoaşterea mişcării unui punct implică răspunsul la două întrebări : unde se găseşte în orice moment de timp punctul şi cum se mişcă acesta în raport cu sistemul de referinţă considerat. În general, răspunsul se obţine în mod direct dacă este cunoscut vectorul de poziţie r ca funcţie de timp (fig.1.1) ( )r r t= (1.1) Această funcţie vectorială trebuie să fie : continuă, uniformă (punctul nu poate ocupa simultan două poziţii în spaţiu), finită în modul şi derivabilă de cel puţin două ori. Studiul proprietăţilor generale ale mişcării se va face pornind de la relaţia vectorială (1.1). Vectorul r este definit de trei funcţii scalare (coordonate) în spaţiu, de două pe o suprafaţă şi de una pe o curbă, din care rezultă că punctul are trei, două şi respectiv un grad de libertate.
Fig. 1.1. M0(x,y,0)
x y
M(x,y,z) z
x O
z
k
i y
j r

Cinematica A. Vasilescu 12
1.2. NOŢIUNI FUNDAMENTALE
1.2.1. Traiectorie
Definiţie Traiectoria este locul geometric al poziţiilor succesive pe care punctul le ocupă în spaţiu, în timpul mişcării.
Între traiectoria şi curba pe care se deplasează punctul nu există totdeauna o coincidenţă. Spre exemplu, pe un cerc, un punct poate parcurge numai un arc sau poate parcurge de mai multe ori cercul, iar pe o dreaptă poate parcurge numai un segment din aceasta şi nu toată dreapta.
Ţinând cont că mişcarea începe de la un anumit moment t0 şi se termină la un alt moment t1, iar timpul este strict crescător, domeniul de existenţă al acestuia impune condiţii restrictive coordonatelor geometrice.
Referitor la traiectorie, se deosebesc două tipuri de probleme : a) Se cunosc ecuaţiile parametrice ale traiectoriei (funcţiile scalare care definesc vectorul ( )r r t= ) şi se cere ecuaţia curbei suport a traiectoriei care se stabileşte prin eliminarea parametrului variabil, de obicei t. Funcţia vectorială
( )r t se defineşte în general cu ajutorul a trei funcţii scalare astfel : - În sistemul de referinţă cartezian, triortogonal, drept : ( ), ( ), ( )x x t y y t z z t= = = , (1.2) iar vectorul de poziţie ( )r t se poate scrie : ( )r t x i y j z k= + + (1.3)
unde , , i j k sunt versorii axelor Ox, Oy, Oz (fig. 1.1). - În sistemul de referinţă cilindric (fig. 1.2) cele trei funcţii scalare sunt : raza polară r = OM0, unghiul polar θ şi cota punctului z : ( ), ( ), ( )r r t t z z tθ θ= = = (1.4)
Vectorul de poziţie variabil OM are expresia în acest caz : ( )r t r z kρ= ⋅ + ⋅ (1.5)
Ecuaţiile (1.2) şi (1.4) se consideră ca fiind ecuaţiile parametrice ale traiectoriei. Observaţie. Problema mişcării punctului într-un plan conduce la stabilirea poziţie acestuia cu ajutorul coordonatelor polare : raza polară r = OM0 şi unghiul polar θ, ceea ce conduce la definirea sistemului de referintă polar, obţinut prin particularizare, din sistemului de referinţă cilindric prin considerarea cotei z = 0.
Fig. 1.2.
r θ y
z
x O
z
n
ρ
M(r,θ, z)
M0(r,θ, 0)
k

Cinematica punctului Noţiuni fundamentale 13
APLICAŢIA 1.1. Vectorul de poziţie al unui punct material aflat în planul xOy (adică z = 0) este dat sub forma : ( ) cos ( ) sin ( )r t t i t jθ θ= ⋅ + ⋅ . Să se stabilească ecuaţia curbei suport a traiectoriei.
Răspuns : Deoarece versorii vectorului de poziţie sunt i şi j , atunci se identifică ecuaţiile parametrice în sistemul coordonatelor carteziene care sunt :
cos ( )x tθ= , sin ( )y tθ= . Eliminarea parametrului t se realizează folosind relaţia trigonometrică
2 2sin cos 1θ θ+ = , din care se deduce ecuaţia unui cerc de rază egală cu unitatea, având centrul în originea sistemului de axe : 2 2 1x y+ = . b) Se cunoaşte traiectoria punctului şi se cere să se determine în fiecare moment poziţia acestuia. Deoarece traiectoria este o curbă continuă şi are în orice punct o tangentă unică, atunci poziţia punctului se poate stabili cu ajutorul unui singur parametru scalar : coordonata curbilinie s care reprezintă arcul de curbă, măsurat de la o origine a arcelor M0, în sensul mişcării (fig. 1.3). În acest caz punctul are un singur grad de libertate, iar relaţia ( )s s t= (1.6) reprezintă ecuaţia orară a mişcării unui punct pe o curbă. APLICAŢIA 1.2. Se consideră cercul având raza egală cu 1m pe care se deplasează un punct după
legea orară 2
4s tπ= (m). Să se stabilească timpul necesar punctului pentru
parcurgerea primului semicerc. Care este intervalul de timp pentru parcurgerea celui de-al doilea semicerc? Răspuns : Lungimea primului semicerc parcursă în timpul t1 este egală cu
21 14
s R tππ= = . Se obţine 1 2t = s. Întreaga circumferinţă a cercului este
parcursă într-un timp 2t care se află din relaţia 22 22
4s R tππ= = . Rezultă
2 2 2 2,83t = s. Intervalul de timp necesar parcurgerii celui de-al doilea semicerc este 2 1 0,83t t t∆ = − = s.
Fig. 1.3.
M0
s(t) M

Cinematica A. Vasilescu 14
1.2.2. Viteză Deoarece mobilele pot parcurge distanţe diferite în intervale de timp egale sau aceleaşi distanţe în intervale de timp diferite, atunci este necesară introducerea unei noi noţiuni, numită viteză. Se consideră un punct pe o traiectorie curbilinie mai întâi în poziţia M1, apoi în poziţia infinit vecină M2. Intervalul de timp t∆ pentru parcurgerea arcului M1M2 fiind foarte mic, se poate asimila elementul de arc cu elementul de coardă. Se defineşte ca viteză medie, raportul
mrvt
∆=∆
(1.7)
Dacă intervalul de timp tinde căte zero, adică M1 tinde către M2, viteza medie devine viteza instantanee (fig. 1.4) :
0
limt
r drv rt dt∆ →
∆= = =∆
(1.8)
Notaţia obişnuită pentru derivata unei funcţii scalare sau vectoriale în raport cu timpul t este cu punct :
( ) ( )ddt
= (1.9)
Stabilirea elementelor caracteristice vectorului viteză rezultă din relaţia anterioară (1.8) :
0 0 0 0
lim lim lim limt t t t
rr r sv st r s t
τ∆ → ∆ → ∆ → ∆ →
∆∆ ∆ ∆= = ⋅ ⋅ =∆ ∆ ∆ ∆
(1.10)
deoarece :
0
limt
rr
τ∆ →
∆ =∆
, 0
lim 1t
rs∆ →
∆ =∆
, 0
limt
s ds st dt∆ →
∆ = =∆
, (1.11)
unde s-a notat cu τ versorul tangentei la curba suport a traiectoriei. Prin urmare, se pot evidenţia proprietăţile vitezei :
• viteza este un vector legat ; • direcţia vitezei este tangentă la traiectorie ; • sensul vitezei corespunde cu sensul
mişcării. Din punct de vedere dimensional, ecuaţia vitezei este [v] = LT-1, iar ca unitate de măsură se stabileşte m/s.
mrvt
∆=∆
M2 r(t+∆t)
r(t)
O
Fig. 1.4.
M1 v
∆r

Cinematica punctului Noţiuni fundamentale 15
1.2.3. Acceleraţie Noţiunea de acceleraţie este introdusă pentru a caracteriza modul de variaţie al vitezei în timpul mişcării, ca direcţie, sens şi modul. Variaţia vitezei v∆ între două poziţii infinit vecine M1 şi M2, raportată la intervalul de timp
t∆ se defineşte ca o mărime medie vectorială şi anume, acceleraţia medie (fig. 1.5) :
mvat
∆=∆
(1.12)
Acceleraţia instantanee a (numită simplu acceleraţie) se obţine prin trecere la limită, adică :
0
limt
v dva v rt dt∆ →
∆= = = =∆
(1.13)
Concluzii : • Ca şi viteza, acceleraţia este un vector legat punctului în mişcare. • Ecuaţia de dimensiuni a acceleraţiei este [a] = LT -2. • Unitatea de măsură pentru acceleraţie este m/s2. Remarcă : • Viteza şi acceleraţia sunt mărimi vectoriale invariante la schimbarea
sistemului de referinţă fix (inerţial). Afirmaţia se verifică considerând un punct O1 ca origine a noului sistem de referinţă (fig. 1.6) şi atunci se poate scrie : 1 Or r r= + (1.14) Prin derivări succesive se obţine : 1r r v= = ; 1r r a= = (1.15) ceea ce era de demonstrat.
Fig. 1.6.
M
O O1
rO
r r1
Fig. 1.5. M1
M2 v' ∆v
am v' a
v

Cinematica A. Vasilescu 16
APLICAŢIA 1.3. Să se stabilească traiectoria unui punct al cărui vector de poziţie este
22r t i t j= + (coeficienţii versorilor sunt în metri), apoi să se calculeze viteza şi acceleraţia la momentul iniţial şi la timpul t1 egal cu o secundă de la începutul mişcării, iar în final să se reprezinte aceşti vectori. Răspuns : Ecuaţiile parametrice ale traiectoriei sunt : x t= şi 22y t= . Se elimină timpul între cele două coordonate şi se găseşte ecuaţia 22y x= care reprezintă o parabolă care trece prin originea sistemului de axe şi are axa Oy axă de simetrie. Deoarece mişcarea începe la
0t = , poziţia iniţială este originea sistemului de axe : 0 (0) 0x x= = şi 0 (0) 0y y= = , iar la o secundă de la debutul mişcării, punctul are
coordonatele 1 (1) 1x x= = m şi 1 (1) 2y y= = m. Cum prin convenţie timpul se consideră pozitiv, este limpede că mobilul se deplasează pe ramura din dreapta parabolei deoarece valorile coordonatei x t= sunt crescătoare (fig. 1.7). Viteza se calculează cu relaţia (1.8) : 1 4v r i t j= = ⋅ + ⋅ , adică proiecţiile vitezei pe axe sunt : 1xv = şi 4yv t= . La 0 0t = , 0 1v i= ⋅ , iar la 1 1t = s,
1 1 4v i j= ⋅ + ⋅ (fig. 1.7). Acceleraţia punctului se stabileşte prin derivarea expresiei vitezei : 4a v j= = ⋅ , ceea ce înseamnă că aceasta este o constantă vectorială : 0 1a a a= = . APLICAŢIA 1.4.
Să se stabilească traiectoria, viteza şi acceleraţia unui punct, cunoscând ecuaţiile parametrice ale traiectoriei x t= şi 22 1y t= − şi să se compare rezultatele cu cele de la aplicaţia precedentă 1.3.
Răspuns : În acest caz se verifică numeric situaţia translatării sistemului de referinţă. Faţă de cazul de la aplicaţia precedentă, traiectoria este parabola 22 1y x= − , fiind translatată pe verticală cu o unitate în jos. Se verifică invarianţa vitezei şi acceleraţiei : 1 4v r i t j= = ⋅ + ⋅ , 4a v j= = ⋅ . Reprezentarea acestora este dată în figura 1.8.
y
M1(x1,y1)
x
v1y v1
a1
v0
a0
v1x
O
Fig. 1.7.
y
M1(1,1)
x
v1y v1
a1
v0
a0
v1x
P0(0,-1)
O
Fig. 1.8.

Cinematica punctului Noţiuni fundamentale
17
1.2.4. Viteză şi acceleraţie unghiulară Poziţia unui punct pe o traiectorie circulară poate fi precizată cu ajutorul unui unghi polar θ, raportat la o axă fixă : ( )tθ θ= (1.16) Pe cercul din figura 1.9 se consideră două poziţii succesive M1 şi M2. Analog cu viteza medie, viteza unghiulară medie se defineşte :
m tθω ∆=
∆ (1.17)
Viteza unghiulară instantanee sau pe scurt viteza unghiulară este :
0
limt
dt dtθ θω θ
∆ →
∆= = =∆
(1.18)
iar acceleraţia unghiulară instantanee (acceleraţia unghiulară)
0
limt
dt dtω ωε ω θ
∆ →
∆= = = =∆
(1.19)
Dimensiunile acestor mărimi fizice sunt [ω] = T-1 şi [ε] = T-2, iar unităţile lor de măsură sunt respectiv rad/s şi rad/s2. APLICAŢIA 1.5. Să se stabilească viteza şi acceleraţia unghiulară a punctului la 2 secunde de la începutul mişcării, ştiind că acesta se deplasează pe cercul având 1R = m, după
legea orară 2
4s tπ= (m) din aplicaţia 1.2.
Răspuns : Lungimea arcului de cerc este s Rθ= şi deci 2( )4
t tπθ = .
Viteza şi acceleraţia unghiulară se determină mai întâi pentru orice moment prin derivarea în raport cu timpul a unghiului θ :
2tπω θ= = şi
2πε ω θ= = = , apoi se
calculează acestea la timpul cerut 1 2t = s :
1 1( ) 3,14tω ω= = rad/s, respectiv
1 1( ) 1,57tε ε= = rad/s2. x
y
θ(t+∆t)
M2
θ(t)
M1
O
Fig. 1.9.

Cinematica A. Vasilescu
18
1.2.5. Hodograf
Se consideră un punct pe o curbă (C) având vitezele 1v , 2v , 3v ,… în punctele M1, M2, M3,… (fig. 1.10, a), apoi se consideră un punct Q, arbitrar ales în spaţiu în care se aplică vectorii echipolenţi cu vectorii viteză. Când mobilul descrie traiectoria, extremitatea vectorului viteză aplicat în Q descrie o curbă (C'), numită hodograful vitezei (fig. 1.10, b). Curba (C') arată intuitiv variaţia vitezeiv în raport cu timpul.
Observaţia 1. Se deduce uşor că viteza unui punct N pe hodograful vitezei (C') este chiar acceleraţia punctului M. Observaţia 2. Curba suport a traiectoriei punctului M se poate defini acum ca fiind hodograful vectorului de poziţie r . APLICAŢIA 1.6. Să se stabilească hodograful vitezei în condiţiile mişcării punctului din aplicaţia 1.3.
Răspuns : Expresia vitezei stabilită în cadrul aplicaţiei 1.3 este : 1 4v r i t j= = ⋅ + ⋅ . Determinarea hodografului vitezi se face în mod analog
cu determinarea ecuaţiei curbei suport a traiectoriei punctului, adică se elimină parametrul timp între proiecţiile vitezei (în m/s). Se notează : 1xX v= = şi
4yY v t= = şi se observă că deoarece proiecţia vitezei pe orizontală este constantă, hodograful este o dreaptă de ecuaţie 1X = , paralelă cu axa verticală Oy (fig. 1.11). Punctul fictiv N se deplasează de jos în sus, pornind din N0, apoi la timpul t1 = 0,25s trece prin N1, iar la t2 = 0,5s trece prin N2. Viteza punctului N este de fapt acceleraţia punctului mobil M din figura 1.7, intuind că aceasta are direcţia verticală şi sensul în sensul mişcării.
Fig. 1.10.
M1
v3
M3
v2
v1
M2
(C)
(a)
N2 v'3
Q v'2
v'1
N1
N3 (C')
(b)
(C')
Q
Y=v y
v'1
a
X=vx
Fig. 1.11.
N1(1,1)
N2(1,2)
N0(1,0)
v'2
v'0

Cinematica punctului Noţiuni fundamentale
19
1.2.6. Viteză areolară Se consideră punctul M care se deplasează pe o curbă oarecare. Acesta parcurge arcul 1MM într-un interval de timp ∆t mic, astfel că vectorul de poziţie r OM= (fig. 1.12) parcurge aria elementară a unui
triunghi OMM1 : 12
A r r∆ = × ∆ .
Ariei elementare i se poate da şi o orientare şi anume perpendiculară pe OMM1 şi având sensul dat de regula burghiului drept, când punctul se deplasează de la M către M1. În acest caz se scrie
12
A r r∆ = × ∆ (1.20)
Prin definiţie, viteza areolară medie este
12m
A rrt t
∆ ∆Ω = = ×∆ ∆
, (1.21)
iar viteza areolară (instantanee) a punctului M în raport cu polul O este limita acestui vector când variaţia timpului ∆t tinde către zero :
0 0
1 1lim lim2 2t t
A rr r vt t∆ → ∆ →
∆ ∆Ω = = × = ×∆ ∆
(1.22)
Viteza areolară caracterizează modul în care vectorul de poziţie al punctului descrie suprafaţa conică cu vârful în O, extremitatea sa M (punctul) parcurgând traiectoria. Observaţia 1. Viteza areolară este nulă când vectorul viteză este coliniar cu vectorul de poziţie (mobilul trece prin O). Observaţia 2. Proiecţiile vitezei areolare se obţin din dezvoltarea produsului vectorial (1.22) :
1 1 1( ); ( ); ( ).2 2 2x y zyz zy zx xz xy yxΩ = − Ω = − Ω = − (1.23)
v
r(t)
M
O
Ω r(t+∆t) M1
Fig. 1.12.
∆r

Cinematica A. Vasilescu
20
Observaţia 3. Atunci când punctul descrie o curbă plană situată în planul xOy, vitezea areolară are direcţie fixă, normală la planul mişcării :
0x yΩ = Ω = ,. 0zΩ ≠ . Folosind coordonatele polare, se calculează
cossin
x ry r
θθ
= =
→sin
cos x r yy r x
θ θ θθ θ θ
= − = −
= =→ 2 2 21 1( )
2 2z x y rθ θΩ = + =
Observaţia 4. Reciproc, dacă mişcarea unui punct se face cu viteza areolară constantă, atunci traiectoria este o curbă plană. Deci C constΩ = = şi cum relaţia
de definiţie a vitezei areolare se scrie : 12
r v C× = , atunci înmulţind scalar cu
vectorul de poziţie r xi yj zk= + + se obţine :
1 ( ) 02
C r r v r• = × • = → 0x y zC x C y C z+ + = (1.24)
Relaţia (1.24) reprezintă ecuaţia unui plan în care Cx, Cy, Cz sunt proiecţiile constantei C pe cele trei axe.
APLICAŢIA 1.7. Să se calculeze viteza areolară cu datele mişcării punctului din aplicaţia 1.1. Răspuns : În cadrul aplicaţiei 1.1, punctul are o mişcare pe un cerc de rază
1r m= (fig. 1.13), având ecuaţiile parametrice ale traiectoriei cunoscute :
cos ( )x tθ= , sin ( )y tθ= . Proiecţiile vitezei sunt obţinute prin derivarea
coordonatelor : sinxv x θ θ= = − şi cosyv y θ θ= = . Se calculează viteza
areolară cu relaţia (1.23) : 2 21 1 1( ) (cos sin )2 2 2z xy yx θ θ θ θΩ = − = + = .
În final, se compară rezultatul obţinut cu expresia vitezei areolare în
coordonate polare 212z rθΩ = (vezi observaţia 3). Deoarece raza cercului este
egală cu unitatea, relaţia obţinută este corectă.
Fig. 1.13.
r y O
v
z
θ M0 M 0MM s rθ= =
Ω
x

Cinematica punctului Noţiuni fundamentale
21
1.2.7. Clasificarea mişcărilor Criteriile de clasificare folosite în mod obişnuit au în vedere : a) forma traiectoriei : • mişcare rectilinie ; • mişcare curbilinie ; b) modul de variaţie a vitezei sau a acceleraţiei. • Mişcarea în care viteza este constantă în modul se numeşte mişcare uniformă. • Dacă mărimea vitezei este o funcţie liniară în raport cu timpul, adică
componenta tangenţială a acceleraţiei este constantă, atunci mişcarea se numeşte uniform variată. Se cunosc două posibilităţi : atunci când viteza şi componenta tangenţială a acceleraţiei au acelaşi sens, mişcarea este uniform accelerată, iar atunci când au sensuri contrare, mişcarea este uniform încetinită.
Exemplu : Un exemplu tipic de mişcare rectilinie uniform variată îl reprezintă mişcarea unui corp greu de dimensiuni neglijabile pe verticală (acceleraţia gravitaţională g este considerată constantă). Se acceptă condiţiile pentru care rezistenţa aerului este neglijabilă sau se spune că mişcarea acestuia se produce în vid. Astfel, în situaţia azvârlirii corpului (mişcare ascendentă), se spune că acesta are o mişcare uniform încetinită, deoarece viteza şi acceleraţia au sensuri opuse. Afirmaţia este adevărată pentru că viteza are sensul mişcării (în sus), iar acceleraţia este dirijată în jos (fig. 1.14, a). Atunci când corpul cade pe verticală, viteza şi acceleraţia au acelaşi sens şi mişcarea este numită uniform accelerată (fig. 1.14, b). În cadrul acestui capitol vor fi studiate in detaliu unele tipuri de mişcări particulare care intervin frecvent în aplicaţiile din dinamică.
(b) Fig. 1.14.
g
O
M v
y
x
g
O
M v
y
x
(a)

Cinematica A. Vasilescu 22
1.3. MIŞCAREA PUNCTULUI ÎN UNELE SISTEME DE REFERINŢĂ 1.3.1. Cinematica punctului în coordonate carteziene Poziţia punctului la un moment dat (fig. 1.1) se poate exprima în sistemul de coordonate carteziene prin intermediul coordonatelor x, y, z sau prin intermediul vectorului de poziţie ( )r t conform relaţiilor (1.1) şi (1.2). Aşa cum s-a arătat, traiectoria punctului se poate găsi prin eliminarea timpului între coordonatele x, y, z care sunt funcţii de timp. Ecuaţia curbei suport a traiectoriei se obţine prin intersectarea a două suprafeţe exprimate prin relaţiile :
1
2
( , , ) 0( , , ) 0
f x y zf x y z
= =
(1.25)
Pornind de la expresia vectorului de poziţie ( )r t x i y j z k= ⋅ + ⋅ + ⋅ , (1.26) şi ţinând cont de relaţia de definiţie a vitezei (1.8), se stabileşte :
ddrv r x i y j z kt
= = = ⋅ + ⋅ + ⋅ (1.27)
în care proiecţiile vectorului viteză sunt ,x y şi z : ; ; .x y zv x v y v z= = = (1.28) Observaţia 1. Proiecţia vitezei unui punct pe o axă este egală cu viteza proiecţiei punctului pe acea axă. Rezultă mărimea vitezei :
2 2 2 2 2 2x y zv v v v x y z= + + = + + , (1.29)
Acceleraţia punctului se stabileşte conform relaţiei (1.13) prin derivarea vitezei : x y za v v i v j v k x i y j z k= = ⋅ + ⋅ + ⋅ = ⋅ + ⋅ + ⋅ , (1.30) adică proiecţiile acceleraţiei pe axe sunt egale cu : ; ; x x y y z za v x a v y a v z= = = = = = , (1.31) iar mărimea acesteia se calculează :
2 2 2a x y z= + + (1.32) Se reaminteşte că vectorul viteză are direcţia tangentă la traiectorie, iar vectorul acceleraţie este orientat întotdeauna către interiorul traiectoriei.

Cinematica punctului Mişcarea punctului în unele sisteme de referinţă 23
Pentru studiul mişcării punctului într-un plan (fig. 1.15), se poate considera sistemul de referinţă plan xOy unde ( )r t x i y j= ⋅ + ⋅ , 1 2( ), ( )x t y tϕ ϕ= = . (1.33) Curba support a traiectoriei este obţinută prin eliminarea timpului t între coordonatele x şi y : ( , ) 0f x y = . (1.34) În problema plană, expresiile vitezei şi acceleraţiei sunt mai simple :
v r x i y j= = ⋅ + ⋅ , , ,x yv x v y= = 2 2v x y= + (1.35)
a v x i y j= = ⋅ + ⋅ , ; ,x ya x a y= = 2 2a x y= + (1.36)
Pentru studiul mişcării punctului pe o axă Ox, se alege ca sistem de referinţă chiar axa, ( )r t x i= ⋅ , v x i= ⋅ , v x= , a x i= ⋅ , a x= (1.37) APLICAŢIA 1.8. Un punct se deplasează după legea 24x t= ; 23(1 )y t= − , unde dimensiunile coordonatelor sunt date în metri. Să se stabilească traiectoria, viteza, acceleraţia şi hodograful vitezei.
Răspuns : Se elimină timpul între cele două coordonate şi se găseşte ecuaţia curbei suport a traiectoriei : 3(1 / 4)y x= − care reprezintă o dreaptă. Pentru t = 0s, se obţine poziţia iniţială M0( 0 0x = ; 0 3y = ) (fig. 1.16). Viteza are proiecţiile : 8xv x t= = ; 6yv y t= = − , iar expresia
vectorială a acesteia este 8 6v t i t j= ⋅ − ⋅ . Modulul vitezei rezultă 10v t= . Acceleraţia are proiecţiile : 8xa x= = m/s2 ; 6ya y= = − m/s2.
Acceleraţia este 8 6a i j= ⋅ − ⋅ , iar modulul 10a = m/s2, arată că mişcarea punctului este rectilinie uniform accelerată. Hodograful vitezei se stabileşte pornind de la ecuaţiile parametrice :
8xX v t= = , 6yY v t= = − , de unde prin eliminarea parametrului timp t, se obţine ecuaţia unei drepte :
0,75Y X= − (fig. 1.17).
y
x a
O
M0 M v1
Fig. 1.16.
Y X Q
v'1
Fig. 1.17.
y
x
r
ax vy
vx
O Fig. 1.15.
M(x,y)
a ay

Cinematica A. Vasilescu 24
1.3.2. Cinematica punctului în coordonate cilindrice Mişcarea punctului în sistemul de referinţă cilindric este definită cu ajutorul a trei coordonate, aşa cum s-a arătat în paragraful 1.2.1 şi anume : raza polară 0( )r r t OM= = care poate lua numai valori pozitive, unghiul polar
( )tθ θ= cu valori între 0 şi 2π şi cota punctului z (-∞ < z < +∞ ). Vectorul de
poziţie variabil OM din figura 1.2 are expresia (1.5) : ( )r t r z kρ= ⋅ + ⋅ (1.38) Versorii care definesc axele sistemului de referinţă cilindric sunt ( )tρ ρ= ,
( )n n t= , constant.k = Se observă că primii doi versori au direcţii variabile în timp şi ca urmare, într-o primă etapă este necesar să se stabilească derivatele lor în raport cu timpul. În mod evident, aceste derivate sunt necesare la stabilirea expresiilor vitezei şi acceleraţiei punctului. Mai întâi se exprimă versorii ρ şi n în funcţie de proiecţiile lor pe axele fixe Ox şi Oy (fig. 1.18) : cos sini jρ θ θ= ⋅ + ⋅ ; sin cosn i jθ θ= − ⋅ + ⋅ . (1.39) Relaţiile anterioare pot fi deduse şi prin considerarea unei rotaţii plane de unghi θ a versorilor ρ şi n faţă de versorii i şi j :
cos sinsin cos
in jρ θ θ
θ θ
= − (1.40)
Derivarea expresiilor (1.39) în raport cu timpul conduce la : sin cosi j nρ θ θ θ θ θ= − ⋅ + ⋅ = ; (1.41) cos sinn i jθ θ θ θ θρ= − ⋅ − ⋅ = − (1.42) În etapa a doua, viteza se determină conform relaţiei de definiţie (1.8) prin derivarea în raport cu timpul a expresiei (1.38) a vectorului de poziţie r : v r r zk r r n zkρ ρ ρ θ= + + = + + (1.43) Proiecţiile vitezei pe direcţiile definite de versorii ρ , n şi k sunt :
; ; n zv r v r v zρ θ= = = (1.44)
Modulul vitezei se calculează : 2 2 2n zv v v vρ= + + sau
2 2 2 2v r r zθ= + + (1.45) În etapa a treia, derivând în raport cu timpul expresia vitezei (1.43), se stabileşte acceleraţia punctului ţinând seama că termenii rρ şi r nθ sunt produse de doi, respectiv de trei funcţii de timp :
Fig. 1.18.
y M0
θ j
x ρ n
i θ
O

Cinematica punctului Mişcarea punctului în unele sisteme de referinţă 25
2 ( ) ( 2 )
a v r r r n r n r n zk
r r r r n zk
ρ ρ θ θ θ
θ ρ θ θ
= = + + + + + =
= − + + + (1.46)
Proiecţiile acceleraţiei sunt : 2; 2 ; n za r r a r r a zρ θ θ θ= − = + = (1.47) Modulul acceleraţie se calculează cu relaţia următoare :
2 2 2n za a a aρ= + + , (1.48)
în care se înlocuiesc proiecţiile (1.47). Observaţia 1. Cazul particular pentru care coordonata z = 0, adică traiectoria punctului este o curbă plană (situată în planul xOy), ne conduce la studiul mişcării punctului în coordonate polare. Aceste coordonate polare sunt (vezi şi observaţia de la paragraful 1.2.1., pagina 12) : ( )r r t= , ( )tθ θ= (1.49) Observaţia 2. Viteza punctului v r r nρ θ= + (1.50) are două componente :
• v rρ ρ= este componenta radială provenind din variaţia razei polare ;
• nv r nθ= este componenta normală provenind din variaţia în timp a unghiului polar.
Observaţia 3. Acceleraţia punctului 2( ) ( 2 )a r r r r nθ ρ θ θ= − + + (1.51) are tot două componente :
• 2( )a r rρ θ ρ= − componenta radială. Primul termen rρ este acceleraţia radială provenind din variaţia în timp a vitezei radiale, iar al doilea termen 2rθ ρ− este acceleraţia centripetă.
• ( 2 )na r r nθ θ= + componenta normală. Primul termen din această
componentă este r nθ şi reprezintă contribuţia acceleraţiei provenind din variaţia în timp a acceleraţiei unghiulare θ , iar ultimul termen 2r nθ este acceleraţia Coriolis, ca o conscinţă a variaţiei lui r, atunci când viteza unghiulară θ este nenulă. Asupra acestei acceleraţii se va reveni în capitolul al treilea.

Cinematica A. Vasilescu 26
1.3.3. Cinematica punctului în triedrul lui Frenet Se consideră cunoscută traiectoria punctului material şi se alege un sistem de referinţă mobil cu originea în punctul M având următoarele axe notate :
- Mτ tangenta la traiectorie, cu sensul pozitiv orientat în sensul mişcării punctului ; - Mν normala principală la traiectorie în M, cu sensul pozitiv spre centrul de curbură ; - M β binormala este perpendiculară pe planul
Mτ ν , cu sensul pozitiv astfel încât, cele trei axe să formeze un triedru drept (fig. 1.19). Deoarece poziţia punctului poate fi definită cu ajutorul coordonatei curbilinii s, şi ţinând cont de
definiţia vitezei şi de relaţia (1.10) : v vs τ τ= ⋅ = ⋅ (1.52) unde se notează în acest paragraf viteza cu "v" pentru a nu se confunda cu "v" (litera grecească "niu") cu care se notează versorul axei normale. Din această relaţie rezultă următoarele proprietăţi ale vectorului viteză :
• viteza are direcţia tangentei la traiectorie ; • sensul vitezei este în sensul mişcării ; • mărimea vitezei este egală cu valoarea derivatei coordonatei curbilinii.
Acceleraţia se stabileşte derivând viteza din expresia (1.52) şi se ţine seama de faptul că versorul τ se derivează, deoarece este de direcţie variabilă : va s sτ τ= = ⋅ + ⋅ (1.53) unde :
d d d dd d d d
s sst s t sτ τ ττ ν
ρ= = ⋅ = = (1.54)
Deoarece conform formulei lui Frenet :
d 1dsτ ν
ρ= (1.55)
unde ρ reprezintă raza de curbură în poziţia considerată, din relaţiile (1.53) şi (1.54) se obţine :
2sa s a aτ ντ ν τ ν
ρ= ⋅ + = ⋅ + ⋅ (1.56)
Proiecţiile acceleraţiei pe axele triedrului lui Frenet sunt :
2 2vv; ; 0.sa s a aτ ν βρ ρ
= = = = = (1.57)
α M0
ν
τ aτ
Fig. 1.19.
r
s
aν
M(s) v
a
O

Cinematica punctului Mişcarea punctului în unele sisteme de referinţă 27
Modulul acceleraţiei se calculează :
4
22
v vaρ
= + (1.58)
Proprietăţile pe care le are vectorul acceleraţie, decurg din interpretarea relaţiilor anterioare : Pa1. Componenta normală aν este îndreptată întotdeauna spre centrul de
curbură al traiectoriei şi prin urmare vectorul acceleraţie este îndreptat spre interiorul acestei curbe.
Pa2. Componenta tangenţială a acceleraţiei aτ , arată variaţia mărimii vitezei, în timp ce componenta normală aν arată variaţia vitezei ca direcţie.
Pa3. Dacă v v 0a aτ τ⋅ = ⋅ > mişcarea este accelerată, iar dacă v 0aτ⋅ < mişcarea este încetinită.
Observaţia 1. Dacă v = const., atunci 0aτ = şi deci mişcarea este uniformă.
Observaţia 2. Acceleraţia este zero dacă ambele componente ale acceleraţiei sunt nule. Condiţia 0aν = este adevărată dacă ρ = ∞ , sau altfel spus, dacă mişcarea este rectilinie. În concluzie, singura mişcare a unui punct material în care acceleraţia este nulă este mişcarea rectilinie uniformă. Observaţia 3. Raza de curbură a curbei suport a traiectoriei se poate determina pe cale cinematică, din relaţia (1.58) :
2
2 2
v
vaρ =
− (1.59)
Cum componenta normală aν poate fi exprimată funcţie de proiecţia acceleraţiei (fig. 1.17) :
v sin v
sinv v
a aa aν
αα
⋅ ×= = = (1.60)
şi ţinând cont de expresia (1.57), se obţine următoarea expresie a razei de curbură :
2 3v v v
v va
aρ
ρ×
= ⇒ =×
(1.61)
Dacă în această expresie a razei de curbură se substituie valoarea
modulului vitezei 2 2 2v x y z= + + şi se calculează produsul vectorial :

Cinematica A. Vasilescu 28
v ( ) ( ) ( )i j k
a x y z yz zy i zx xz j xy yx kx y z
× = = − + − + − ,
atunci se obţine formula următoare pentru raza de curbură :
( )3/ 22 2 2
2 2 2( ) ( ) ( )
x y z
y z z y z x x z x y y xρ
+ +=
− + − + − (1.62)
Această expresie este identică cu cea din geometria diferenţială. APLICAŢIA 1.9. Să se stabilească raza de curbură la momentul iniţial pentru punctul aflat în mişcare pe parabola 22y x= , în condiţiile enunţate la aplicaţia 1.3, pagina 12. Răspuns : Deoarece vectorul de poziţie dat în enunţul aplicaţiei este cunoscut 22r t i t j= + , atunci, prin derivarea în raport cu timpul, expresiile vitezei şi acceleraţiei punctului sunt : v 1 4r i t j= = ⋅ + ⋅ şi respectiv,
4a v j= = ⋅ . La 0 0t = , 0v 1 i= ⋅ , 0 4a j= ⋅ şi deci 0 0v 4a× = m2/s3.
Raza de curbură se calculează cu relaţia (1.61) : 3
00
0 0
v0,25
v aρ = =
× m.
APLICAŢIA 1.10. Să se stabilească poziţia centrului de curbură al traiectoriei unui punct printr-o metodă grafică, cunoscând viteza şi acceleraţia la un anumit moment de timp. Răspuns : Se porneşte de la expresia componentei acceleraţiei normale (1.57) scrisă sub forma : 2v aν ρ= ⋅ . Forma acestei relaţii ne sugerează aplicarea teoremei înălţimii : "într-un triunghi dreptunghic pătratul înălţimii
relative la ipotenuză este egal cu aria dreptunghiului având ca laturi segmentele determinate de înălţime pe ipotenuză" : 2MA MB MO= ⋅ (fig. 1.20). Rezultă următoarea construcţie grafică : se rabate acceleraţia normală cu π radiani, în punctul B. Cunoscând viteza MA aflată pe tangenta la traiectorie, se duce din A perpendiculara pe latura AB, până când aceasta întâlneşte normala Mν în O. Punctul O este centrul de curbură căutat (MO = ρ). ν
τ aτ
Fig. 1.20.
aν
B
v
a
O
A M

Cinematica punctului Mişcări particulare ale punctului 29
1.4. MIŞCĂRI PARTICULARE ALE PUNCTULUI
1.4.1. Mişcarea rectilinie Traiectoria unei mişcări rectilinii este o dreaptă. Dacă se consideră axa Ox chiar axa mişcării, atunci coordonata x a punctului este şi coordonata curbilinie. Rezultă că se va studia mişcarea folosind rezultatele obţinute cu ajutorul triedrului mobil al lui Frenet în cazul particular când traiectoria este o dreaptă. Pentru viteză şi acceleraţie se obţin expresiile (fig. 1.21) : v s x= = (1.63) a v s x= = = (1.64) din care se deduce proprietatea că în cazul mişcării rectilinii, cei doi vectori viteză şi acceleraţie sunt coliniari şi reciproc, dacă viteza şi acceleraţia sunt doi vectori coliniari, atunci mişcarea este rectilinie. Studiul complet al mişcării se poate face numai dacă se cunosc condiţiile iniţiale ale mişcării : poziţia iniţială x0 şi viteza iniţială v0.
Mişcarea rectilinie uniformă este mişcarea pentru care viteza este constantă şi deci acceleraţia nulă (a = 0) : 0v v= (1.65) Rezultă : 0v x v= = . (1.66) Prin integrare se găseşte : 0x v t C= + , (1.67) iar din condiţiile iniţiale se obţine 0C x= . Legea de mişcare este deci : 0 0x v t x= + (1.68) Diagramele mişcării sunt reprezentate în figura 1.22.
M
s = x x v
a O
Fig. 1.21.
v
v0
O t
a
a = 0
O t
x
x0
O t
Fig. 1.22.

Cinematica A. Vasilescu 30
Dacă acceleraţia este constantă, atunci mişcarea este uniform variată (accelerată sau încetinită). Pornind de la caracteristica mişcării : 0 .a a const= = se deduce 0a x a= = (1.69) relaţie care se integrează de două ori şi se obţine : 0 1x a t C= + (1.70)
20 1 2
12
x a t C t C= + + (1.71)
Constantele de integrare C1 şi C2 se stabilesc din condiţiile iniţiale ale mişcării : 0 00; ; t x x v v= = = , (1.72) Se determină 1 0 2 0; .C v C x= = (1.73) În acest caz legea de mişcare (1.71) devine :
20 0 0
12
x a t v t x= + + , (1.74)
iar expresia vitezei (1.70) va avea forma : 0 0v x a t v= = + (1.75) Exemple de diagrame ale mişcării uniform accelerate sunt prezentate în figura 1.23, iar pentru mişcarea uniform încetinită, în figura 1.24.
v
v0
O t
x
x0
O t
a a0 > 0
O t
a0
Fig. 1.23.
v
v0
O t
x
x0
O t
a
a0 < 0 O t a0
Fig. 1.24.

Cinematica punctului Mişcări particulare ale punctului
31
1.4.2. Mişcarea circulară În mişcarea circulară, punctul este localizat pe traiectoria sa, care este un cerc, prin coordonata curbilinie s (fig. 1.25, a). Arcul de cerc s descris de punct are un unghi la centru θ şi se poate exprima funcţie de raza cercului R prin relaţia : s Rθ= . (1.76) Viteza are mărimea : v s R Rθ ω= = = , (1.77) iar pentru componentele acceleraţiei se obţin expresiile : a s v R Rτ θ ε= = = = (1.78)
2
2 2va R RRν θ ω= = = , (1.79)
Componenta normală aν are direcţia razei cercului şi sensul orientat spre centrul cercului (fig. 1.25, b). Modulul acceleraţiei este :
2 2 2 4a a a Rτ ν ε ω= + = + (1.80) Cazuri particulare : - mişcarea circulară uniformă pentru .constω = se stabileşte 0aτ = şi
0aν ≠ ; legea de mişcare este 0tθ ω θ= + (1.81) - mişcarea circulară uniform variată pentru .constε = rezultă 0aτ ≠ şi
0aν ≠ ; în acest ultim caz, dacă viteza unghiulară ω şi acceleraţia unghiulară ε au acelaşi sens (fig. 1.26, a), mişcarea circulară este uniform accelerată, iar dacă ω şi ε au sensuri opuse (fig. 1.26, b), atunci mişcarea circulară este uniform întârziată.
a τ
a ν a s=R θ θ M 0
M
v
M
M 0 O
ω v= ω × r
r
O
v ε
ω ε ω
(a) (b) Fig. 1.26. Fig. 1.25.
(a) (b)

Cinematica A. Vasilescu
32
Viteza unghiulară se obţine 0tω ε ω= + , (1.82) iar legea de mişcare este :
20 0
12
t tθ ε ω θ= + + (1.83)
Observaţia 1. Se poate stabili o analogie între mişcările rectilinie şi circulară ale punctului material (uniform şi uniform variate), dacă se compară mărimile x cu θ , v cu ω , şi a cu ε . Observaţia 2. Pentru viteza unghiulară se poate da o reprezentare vectorială, considerând că este un vector alunecător, perpendicular pe planul cercului şi care trece prin centrul său. Sensul vectorului ω este determinat (aplicând regula burghiului) de sensul vitezei punctului : v rω= × (1.84) unde r OM= (fig. 1.25, b). APLICAŢIA 1.11. Un punct descrie un cerc de rază 0,4 m, unghiul la centru având expresia
2( ) (rad)4
t tπθ = . Să se calculeze şi să se reprezinte viteza şi acceleraţia
punctului după două secunde de la începutul mişcării. Răspuns : După două secunde, poziţia punctului pe cerc este dată de valoarea unghiului la centru 1( ) (2) radtθ θ π= = (fig. 1.27).
Viteza are mărimea : 1,256 m/s2
v R Rtπθ= = ≅ , iar componentele
acceleraţiei sunt : 2
22 2 2
0,628 m/s ;2
3,944 m/s ;4
a R R
a R Rt
τ
ν
πθ
πθ
= = ≅
= = ≅
din care se calculează şi mărimea acceleraţiei 2 2 24 m/sa a aτ ν= + ≅ .
θ1 M1 M0
aν
aτ a
v1
Fig. 1.27.

Cinematica punctului Mişcări particulare ale punctului 33
1.4.3. Mişcarea uniformă pe elicea circulară
Un punct M se mişcă uniform cu viteza v0 pe o elice circulară, cunoscând raza cilindrului R şi panta α a elicei (fig. 1.28, a). Între pasul p şi panta α a elicei există relaţia (fig. 1.28, b) : 2 tgp Rπ α= ⋅ . În raport cu sistemul de referinţă cartezian Oxyz, ecuaţiile parametrice ale elicei, funcţie de unghiul θ , sunt : cos , sin , z= tgx R y R Rθ θ θ α= ⋅ = ⋅ ⋅ . Rezultă proiecţiile vitezei punctului : sin ,x Rθ θ= − ⋅ cos ,y Rθ θ= ⋅
tgz Rθ α= ⋅ şi se calculează mărimea vitezei 2 2 20v v x y z= = + + =
21 tg cosR Rθ α θ α= + = din care rezultă : 0 cos .v R constθ α= =
Proiecţiile acceleraţiei se calculează ţinând cont că 0θ = : 2 2cos , sin , 0x R y R zθ θ θ θ= − ⋅ = − ⋅ = .
Se observă că acceleraţia este un vector aflat într-un plan paralel cu planul orizontal, având direcţia paralelă cu direcţia razei 'OM :
2 ( cos sin )a R i jθ θ θ= − ⋅ − ⋅
şi mărimea acesteia egală cu 2 2 20 cosa R v Rθ α= = . Utilizând relaţia (1.59),
se calculează raza de curbură a elicei : 2 2
22 2.
cosv v R const
aa vρ
α= = = =
−
M1
Fig. 1.28.
M0
M’
M
Rθ
p
2πR
α
(b)
y
z
O
R
θ M’
x (a)
M M0
M1

Cinematica A. Vasilescu 34
1.4.4. Mişcarea pe cicloidă Un punct M descrie o cicloidă atunci când este situat pe periferia unui disc care se rostogoleşte fără să alunece pe o dreaptă ; se presupune că viteza centrului discului 0v este constantă. Pentru a stabili ecuaţiile parametrice ale acestei curbe, se alege dreapta orizontală D, pe care se rostogoleşte discul drept axă a absciselor, iar ca origine se consideră punctul 0M în care se află punctul M, când acesta se află pe dreapta D. Axa ordonatelor se defineşte normala în
0M pe D, de partea în care se află discul (fig. 1.29, a). Se notează cu I punctul de contact al discului cu dreapta D. Condiţia ca discul să se rostogolească fără să alunece este ca : arcOI IM Rθ= = (1.85) Deoarece punctul C are o mişcare rectilinie uniformă, depasându-se pe o dreaptă paralelă cu axa Ox situată la distanţa R, se poate scrie (fig. 1.29) 0 0OI C C v t= = (1.86) Variaţia unghiului θ în raport cu timpul se află egalând relaţiile (1.85) şi (1.86)
0R v tθ = , de unde 0v tR
θ = (1.87)
Coordonatele punctului M în sistemul de axe ales sunt :
sin sincos cos
x OI R R Ry IC R R R
θ θ θθ θ
= − = − = − = −
(1.88)
care reprezintă ecuaţiile parametrice ale cicloidei. Notând 0v R ω= , ecuaţiile (1.88) se pot scrie şi sub forma :
( sin )(1 cos )
x R t ty R t
ω ωω
= − = −
(1.89)
Fig. 1.29.
I
θ
y
x
R
C M
O=M0
C0 v0 v
A θ/2
(a) D
A
θ/2
θ
xI
C M a
(b)
y
M0

Cinematica punctului Mişcări particulare ale punctului 35
Proiecţiile pe axe ale vitezei se calculează prin derivarea coordonatelor (1.89) :
2(1 cos ) 2 sin2
sin 2 sin cos2 2
x
y
tv x R t R
t tv y R t R
ωω ω ω
ω ωω ω ω
= = − = = = =
(1.90)
Expresia analitică şi modulul vectorului viteză sunt :
[(1 cos ) sin ] 2 sin (sin cos )2 2 2
v R i j R i jθ θ θω θ θ ω= − + = +
2 sin2
v R θω= (1.91)
Observaţia 1. Viteza punctului M este un vector care are modulul, direcţia şi sensul cu aceleaşi caracteristici ca într-o mişcare circulară cu viteza unghiulară ω pe un arc de cerc cu centrul în I (fig. 1.29 a). Demonstraţia proprietăţii că viteza punctului M este perpendiculară pe direcţia IM se face imediat ţinând cont de expresiile analitice ale celor doi vectori, respectiv pentru vectorul de poziţie sin (1 cos )IM R i R jθ θ= − + − şi pentru vectorul vitezei [(1 cos ) sin ]v R i jω θ θ= − + , stabilind că produsul
lor scalar 0v IM = . Direcţia vitezei este deci în lungul laturii MA, deoarece triunghiul IMA este dreptunghic, unde IA este diametrul cercului de rază R, iar unghiul 2MAI θ= (fig. 1.30).
Se poate demonstra că v IMω= . În triunghiul IMA dreptunghic se
scrie cateta opusă unghiului 2θ : sin 2 sin2 2
IM IA Rθ θ= = de unde avem
expresia produsului 2 sin2
IM R vθω ω= = , ceea ce era de demonstrat.
Fig. 1.30. ω θ=
A θ/2
θ
x I
C M
v y
M'0 M0

Cinematica A. Vasilescu 36
Ţinând seama că / .Ov R constω = = , proiecţiile acceleraţiei pe axe sunt :
22 0
22 0
sin sin
cos cos .
x
y
va x RRva y RR
ω θ θ
ω θ θ
= = =
= = =
(1.92)
Vectorul acceleraţie este :
2
2 0(sin cos ) (sin cos )va R i j i jR
ω θ θ θ θ= + = + (1.93)
şi se calculează modulul acceleraţiei :
2
2 2 2 0 const.x yva a a RR
ω= + = = = (1.94)
Deoarece (sin cos )MC R i jθ θ= + , (1.95)
rezultă că acceleraţia a este coliniară cu raza MC , pentru că 0a MC× = . Observaţia 2. Relaţiile (1.94) şi (1.95) arată că vectorul a are în ceea ce priveşte modulul, direcţia şi sensul aceleaşi caracteristici ca într-o mişcare circulară uniformă, cu viteza unghiulară ω , pe un cerc cu centrul în C (fig. 1.29, b). Raza de curbură a cicloidei se poate calcula cu relaţia (1.61). Mai întâi se efectuează produsul vectorial
3 3
20 0(1 cos ) 2 sin2
v vv a k kR R
θθ× = − − = − (1.96)
Modulul vitezei este dat în relaţia (1.91), aşa încât raza de curbură se determină :
3 33 0
320
8 sin2 4 sin 2
22 sin
2
vvR IM
v a vR
θθρ
θ= = = =
× (1.97)

Cinematica punctului Verificaţi-vă cunoştinţele 37
1.5. VERIFICATI-VĂ CUNOŞTINŢELE 1.5.1. Întrebări de autocontrol
(1.1. Generalităţi)
• Să se definească cinematica, diviziune a mecanicii teoretice.
• Definiţia noţiunii de "mişcare" este dată cu ajutorul a trei elemente. Care sunt acestea?
• Ce se înţelege prin "sistem de referinţă"?
• Care este diferenţa între noţiunea de "reper" şi cea de "sistem de referinţă"?
• Cunoaşterea mişcării unui punct presupune răspunsul la două întrebări. Care sunt acestea?
(1.2. Noţiuni fundamentale)
• Să se definească noţiunea de traiectorie a unui punct.
• Să se explice ce reprezintă "ecuaţiile parametrice" ale traiectoriei unui punct.
• Să se compare sistemul de referinţă cartezian cu sistemul de referinţă cilindric, apoi ecuaţiile parametrice ale traiectoriei scrise în cele două sisteme de referinţă.
• În ce condiţii se poate discuta despre "ecuaţia orară a mişcării"?
• Care este deosebirea dintre noţiunile de "viteză medie" şi "viteză instantanee"?
• Să se enumere proprietăţile vectorului viteză pornind de la relaţia v sτ= .
• Noţiunea de acceleraţie pentru ce este utilă în studiul mişcării unui punct?
• De ce se spune şi cum se demonstrează că viteza şi acceleraţia sunt mărimi vectoriale invariante la schimbarea sistemului de referinţă?
• Să se compare noţiunile de viteză şi acceleraţie cu noţiunile de viteză şi acceleraţie unghiulară.
• Să se definească noţiunea de "hodograf".
• Să se precizeze în ce condiţii viteza areolară a mobilului este o mărime vectorială constantă. Dar nulă?
• Să se enumere criteriile de clasificare ale mişcărilor. Exemplificare.

Cinematica A. Vasilescu 38
(1.3. Mişcarea punctului în unele sisteme de referinţă)
• Care sunt expresiile vitezei şi acceleraţiei în coordonate carteziene atunci când mobilul se mişcă pe o dreaptă, atunci când ecuaţiile parametrice ale traiectoriei se cunosc? Dar într-un plan?
• Să se definească coordonatele cilindrice şi domeniul de existenţă a fiecărei coordonate.
• De ce versorii ρ şi n ai sistemului de referinţă cilindric (sau polar) au derivate în raport cu timpul?
• Să se arate care este semnificaţia fiecărei componente a vitezei după direcţia radială si respectiv, după direcţia normală. Idem, pentru acceleraţie.
• Să se definească cele trei axe ale triedrului lui Frenet.
• Să se enumere proprietăţile acceleraţiei plecând de la expresiile componentelor acceleraţiei în triedrul lui Frenet.
(1.4. Mişcări particulare ale punctului)
• Să se arate că dacă vectorii viteză şi acceleraţie sunt coliniari la orice moment de timp, atunci mişcarea este rectilinie.
• Cum se demonstrează că singura mişcare în care acceleraţia este nulă este
mişcarea rectilinie uniformă?
• Ce reprezintă diagramele mişcării?
• Să se scrie ecuaţiile orare pentru mişcarea rectilinie uniformă şi pentru mişcarea rectilinie uniformă variată.
• Să se definească mişcarea circulară uniformă şi mişcarea circulară uniformă variată.
• Să se scrie ecuaţiile parametrice ale mişcării pe elicea circulară.
• Să se enumere caracteristicile vitezei punctului aflat în mişcare pe cicloidă (mărime, direcţie şi sens).
• Acceleraţia punctului aflat în mişcare pe cicloidă are aceleaşi caracteristici cu cele dintr-o mişcare circulară uniformă. Care sunt aceste caracteristici?
• Să se stabilească din expresia (1.97) care este poziţia punctului pe cicloidă pentru care raza de curbură este maximă.
Cinematica punctului Verificaţi-vă cunoştinţele
39
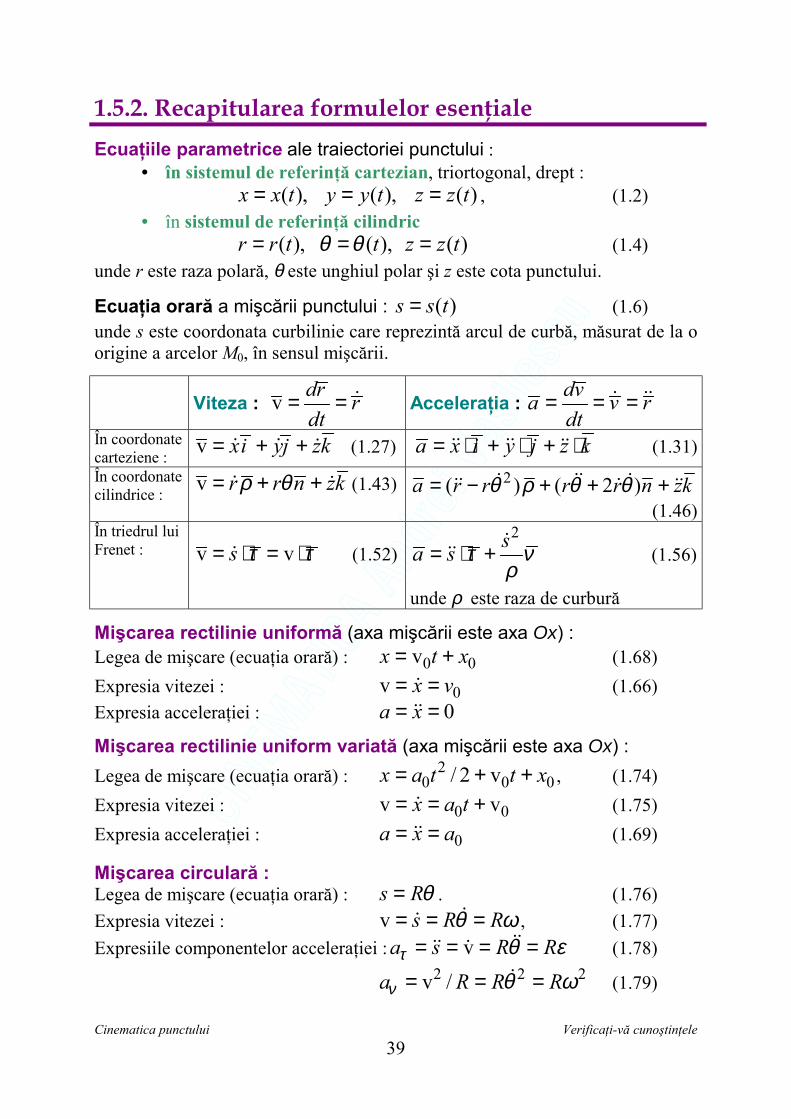
1.5.2. Recapitularea formulelor esenţiale
Ecuaţiile parametrice ale traiectoriei punctului : • în sistemul de referinţă cartezian, triortogonal, drept :
( ), ( ), ( )x x t y y t z z t= = = , (1.2) • în sistemul de referinţă cilindric
( ), ( ), ( )r r t t z z tθ θ= = = (1.4) unde r este raza polară, θ este unghiul polar şi z este cota punctului.
Ecuaţia orară a mişcării punctului : ( )s s t= (1.6) unde s este coordonata curbilinie care reprezintă arcul de curbă, măsurat de la o origine a arcelor M0, în sensul mişcării.
Viteza : v dr r
dt= = Acceleraţia :
dva v rdt
= = =
În coordonate carteziene : v xi yj zk= + + (1.27) a x i y j z k= ⋅ + ⋅ + ⋅ (1.31) În coordonate cilindrice : v r r n zkρ θ= + + (1.43) 2( ) ( 2 )a r r r r n zkθ ρ θ θ= − + + +
(1.46) În triedrul lui Frenet :
v vs τ τ= ⋅ = ⋅ (1.52)
2sa s τ νρ
= ⋅ + (1.56)
unde ρ este raza de curbură
Mişcarea rectilinie uniformă (axa mişcării este axa Ox) : Legea de mişcare (ecuaţia orară) : 0 0vx t x= + (1.68) Expresia vitezei : 0v x v= = (1.66) Expresia acceleraţiei : 0a x= =
Mişcarea rectilinie uniform variată (axa mişcării este axa Ox) : Legea de mişcare (ecuaţia orară) : 2
0 0 0/ 2 vx a t t x= + + , (1.74) Expresia vitezei : 0 0v vx a t= = + (1.75) Expresia acceleraţiei : 0a x a= = (1.69)
Mişcarea circulară : Legea de mişcare (ecuaţia orară) : s Rθ= . (1.76) Expresia vitezei : v s R Rθ ω= = = , (1.77) Expresiile componentelor acceleraţiei : va s R Rτ θ ε= = = = (1.78)
2 2 2v /a R R Rν θ ω= = = (1.79)

Cinematica A. Vasilescu 40
1.5.3. Îndrumări pentru rezolvarea problemelor
Grade de libertate
Un punct liber are trei grade de libertate care reprezintă deci, numărul maxim de grade de libertate ( . . . 3MAX G LN = ). Se consideră în problemele de cinematică numărul gradelor de libertate efective ( . .G LN ) care poate fi mai mic decât cel real (maxim). Astfel, punctul are două grade de libertate efective în problema plană, cel de-al treilea grad de libertate fiind pasiv. De aici se înţelege că exprimarea :"în problema plană, punctul liber are maximum două grade de libertate" poate fi acceptată numai cu amendamentul prezentat mai sus. Existenţa legăturilor reduce numărul maxim al gradelor de libertate, cu numărul legăturilor simple ( . .L SN ) : . . . . . . .G L MAX G L L SN N N= − . (1.98) Stabilirea numărului gradelor de libertate efective ( . .G LN ) este importantă şi se reflectă direct în rezolvarea problemei : numărul ecuaţiilor scalare de proiecţie pentru fiecare dintre vectorii r , v şi a este egal cu . .G LN . Tipuri de probleme
Elementele constitutive ale mişcării punctului sunt : vectorul de poziţie ( )r t , vectorul viteză ( )v r t= şi vectorul acceleraţie ( )a v t= , ceea ce
sugerează trei tipuri de probleme ale cinematicii punctului din perspectiva abordării modelului matematic (operaţii de derivare, de integrare sau ambele) : 1. Problema directă : se cunoaşte ( )r r t= şi se calculează prin derivare
( )v r t= şi apoi, ( )a v r t= = . 2. Problema inversă este problema în care se cunosc : acceleraţia punctului
( )a a t= şi condiţiile iniţiale corespunzătoare poziţiei şi vitezei (la momentul 0t = ). Se calculează prin integrări succesive :
viteza 1( )v a t dt C= ⋅ +∫ şi în continuare,
vectorul de poziţie ( )1 2( )r a t dt C dt C= ⋅ + ⋅ +∫ ∫ .
Constantele de integrare 1C şi 2C se determină din condiţii limită, care în cinematică sunt de regulă cele corespunzătoare momentului iniţial ; acestea se numesc condiţii iniţiale. În acest caz, condiţiile iniţiale se referă la poziţia iniţială şi respectiv, la viteza iniţială pe care o are punctul.
3. Problema mixtă se încadrează între problema directă şi cea inversă. Mai precis, în enunţul problemei se cunosc : expresia vitezei la orice moment şi

Cinematica punctului Verificaţi-vă cunoştinţele
41
condiţia iniţială referitoare la poziţie. Atunci, prin derivare se calculează acceleraţia ( )a v t= , iar prin integrare ( )r v t dt C= ⋅ +∫ . Constanta de
integrare C se stabileşte utilizând coordonatele iniţiale ale punctului. Schema de abordare a fiecăruia dintre cele trei tipuri de probleme este prezentată în tabelul 1.1, unde elementele cunoscute sunt încadrate.
TABELUL 1.1.
Tipul de problemă
1. Directă 2. Inversă 3. Mixtă
( )r t 2( )r v t dt C= ⋅ +∫ ( )r v t dt C= ⋅ +∫
D
eriv
are
←
In
tegr
are
→
In
tegr
are
→
( )v r t= 1( )v a t dt C= ⋅ +∫ ( )v v t=
D
eriv
are
←
In
tegr
are
→
D
eriv
are
←
R
EZO
LVA
RE
( )a v r t= = ( )a a t= ( )a v t= În afara celor trei tipuri de probleme prezentate, se întâlnesc probleme atipice la care se furnizează informaţii parţiale privind elementele constitutive ale mişcării punctului. Strategia de abordare
1) Se stabileşte numărul gradelor de libertate efective pe care le are punctul, ţinând cont de existenţa (eventuală) a legăturilor.
2) Se identifică tipul de problemă (directă, inversă sau mixtă). 3) Funcţie de tipul de problemă, se aplică metoda prezentată în tabelul 1.1. 4) Se utilizează condiţiile iniţiale pentru determinarea constantelor 1C şi 2C în
cazul problemei inverse sau a constantei C în cazul problemei mixte. 5) Se reprezintă traiectoria punctului (din ecuaţiile parametrice ale traiectoriei
se elimină parametrul timp), apoi se calculează şi se reprezintă vectorii v şi a la diferite momente.
6) Se calculează raza de curbură a traiectoriei cu relaţia (1.59) sau (1.61).

Cinematica A. Vasilescu 42
1.5.4. Probleme rezolvate
Problema 1.1. Să se studieze mişcarea unui punct atunci când se cunosc ecuaţiile parametrice ale traiectoriei (constantele r0 şi τ sunt pozitive) : /
0tr r e τ−= ;
/tθ τ= . Rezolvare : 1) Ecuaţiile parametrice ale traiectoriei sunt date în coordonate polare, deci 2GLN = . 2) Este evident că problema se încadrează la tipul "problemă directă".
3) Ecuaţia traiectoriei se obţine eliminând parametrul t : 0r r e θ−= . Rezultă deci o spirală logaritmică. În figura 1.31 este reprezentată spirala pentru următoarele valori ale constantelor : 0 10r = m şi 1τ = s.
4) Calcule intermediare pentru stabilirea vitezei : /0 trr e ττ
−= − şi
1/θ τ= . Expresia vitezei în coordonate polare este v r r nρ θ= + .
După înlocuiri, se obţine :/0 ( )trv e nτ ρ
τ−= − + . Se observă că viteza are
proiecţiile egale pe cele două axe tot timpul mişcării, formând un unghi de 45° cu direcţia radială.
-1
01
23
4
-2 0 2 4 6 8 10 12
x (m)
y (m
)
Fig. 1.31.
Cinematica punctului Verificaţi-vă cunoştinţele
43
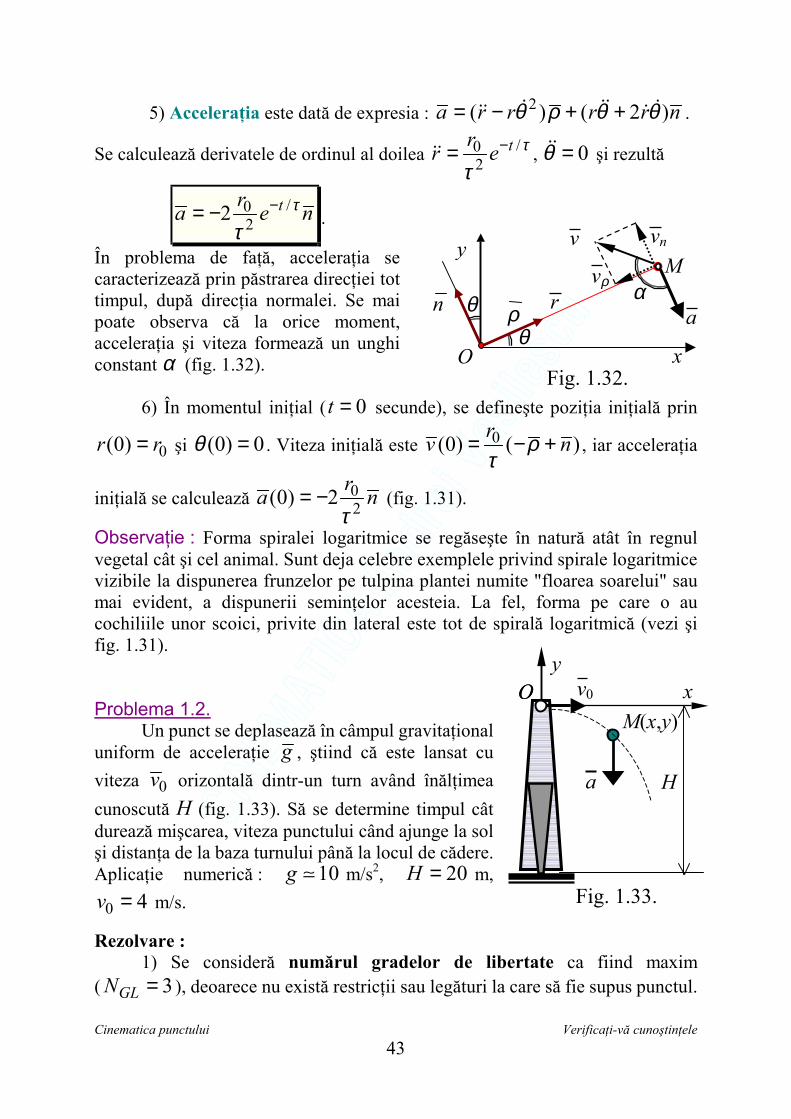
5) Acceleraţia este dată de expresia : 2( ) ( 2 )a r r r r nθ ρ θ θ= − + + .
Se calculează derivatele de ordinul al doilea /02
trr e τ
τ−= , 0θ = şi rezultă
/022 tra e nτ
τ−= − .
În problema de faţă, acceleraţia se caracterizează prin păstrarea direcţiei tot timpul, după direcţia normalei. Se mai poate observa că la orice moment, acceleraţia şi viteza formează un unghi constant α (fig. 1.32). 6) În momentul iniţial ( 0t = secunde), se defineşte poziţia iniţială prin
0(0)r r= şi (0) 0θ = . Viteza iniţială este 0(0) ( )rv nρτ
= − + , iar acceleraţia
iniţială se calculează 02(0) 2
ra nτ
= − (fig. 1.31).
Observaţie : Forma spiralei logaritmice se regăseşte în natură atât în regnul vegetal cât şi cel animal. Sunt deja celebre exemplele privind spirale logaritmice vizibile la dispunerea frunzelor pe tulpina plantei numite "floarea soarelui" sau mai evident, a dispunerii seminţelor acesteia. La fel, forma pe care o au cochiliile unor scoici, privite din lateral este tot de spirală logaritmică (vezi şi fig. 1.31). Problema 1.2. Un punct se deplasează în câmpul gravitaţional uniform de acceleraţie g , ştiind că este lansat cu viteza 0v orizontală dintr-un turn având înălţimea cunoscută H (fig. 1.33). Să se determine timpul cât durează mişcarea, viteza punctului când ajunge la sol şi distanţa de la baza turnului până la locul de cădere. Aplicaţie numerică : 10g m/s2, 20H = m,
0 4v = m/s.
Rezolvare : 1) Se consideră numărul gradelor de libertate ca fiind maxim ( 3GLN = ), deoarece nu există restricţii sau legături la care să fie supus punctul.
Fig. 1.33.
x y
a
v0 O O M(x,y)
H
Fig. 1.32.
y M
θ r
x
ρ n θ
O
a
vn v
vρ α

Cinematica A. Vasilescu 44
2) Ca tip, problema este inversă. Acceleraţia fiind dată în enunţ : a g= (constantă ca direcţie, sens şi modul), se trece la alegerea sistemului de axe. Din convenţia rezolvării problemelor de la disciplina de Fizică, se consideră : • axa Ox orizontală, coliniară şi de acelaşi sens cu viteza iniţială 0 0v v i= ; • axa Oy după verticala locului, sensul de jos în sus, astfel că a gj= − ; • axa Oz în planul orizontal, formând un triedru drept Oxyz.
3) Strategia pentru rezolvarea problemei este indicată în tabelul 1.1, adică se va proceda la integrarea succesivă a expresiei acceleraţiei, utilizând proiecţiile acesteia (1.31) pe cele trei axe :
0
0
xy gz
= = − =
→1
2
3
x Cy gt Cz C
= = − + =
→1 4
22 5
3 6
/ 2
x C t C
y gt C t Cz C t C
= +
= − + + = +
4) Constantele de integrare se stabilesc din condiţiile iniţiale (la 0t = ) :
• pentru viteza iniţială : 0(0) (0)
(0) (0) 0
(0) (0) 0
x
y
z
v x vv y
v z
= = = = = =
→0 1
2
3
0 00
v Cg C
C
= = − ⋅ + =
;
• pentru poziţia iniţială :
(0) 0(0) 0(0) 0
xyz
= = =
→1 4
22 5
3 6
0 0
0 0 / 2 00 0
C C
g C CC C
= ⋅ +
= − ⋅ + ⋅ + = ⋅ +
Din cele două sisteme de câte trei ecuaţii liniare, având necunoscute cele şase constante de integrare se determină : 1 0C = , 2 6 0C C= = = . Aceste valori sunt înlocuite în integralele prime, obţinute mai sus. Rezultă proiecţiile vitezei şi respectiv, ecuaţiile parametrice ale traiectoriei :
0( ; ; 0)v x v y gt z= = − = ; 2
0( ; / 2; 0)r x v t y gt z= = − = '
5) Timpul de coborâre ct , pe parcursul căruia se desfăşoară mişcarea se
găseşte din condiţia ( )cy t H= − : 2
2cgtH− = − ⇒ 2 /ct H g= .
Distanţa măsurată pe orizontală de la baza turnului, la locul de cădere este dată
de relaţia : 0 0( ) 2 /c cx t v t v H g= = .

Cinematica punctului Verificaţi-vă cunoştinţele
45
Vectorul viteză este 0v v i gt j= − ⋅ şi are mărimea 2 2 20v v g t= + .
În momentul căderii, viteza va fi : 0 2cv v i gH j= − ⋅ .
6) Aplicaţie numerică : 3 1,73ct = = s ; 20 3 34,64cx = = m ;
20 10 3cv i j= − ⋅ ; 50,00cv = m/s.
7) Concluzii : • Traiectoria punctului este o curbă plană ( 0z = ), iar prin eliminarea
parametrului timp, se găseşte curba suport a traiectoriei ca fiind parabola : 2
202
gxyv
= − . De aici se deduce că numărul gradelor de libertate efective este
egal cu doi; al treilea grad de libertate corespunzător coordonatei z este pasiv. • Viteza are numai două proiecţii : pe direcţia axei Ox este constantă, iar pe
direcţia axei Oy variază liniar cu timpul. Pe direcţia axei Oz (a gradului de libertate pasiv) viteza are proiecţia identic nulă ( 0zv z= = ).
• Considerând proiecţiile punctului M pe axele de coordonate (Mx şi My), acestea au mişcări rectilinii : Mx - uniformă (cu 0v constantă) şi My - uniform accelerată.
• În mişcarea punctului pe parabola de gradul al doilea, acceleraţia este constantă în mărime, direcţie şi sens. Reciproca este adevărată : dacă acceleraţia punctului este constantă în mărime, direcţie şi sens, atunci punctul descrie o parabolă.
Problema 1.3. O particulă aflată iniţial în repaus, se deplasează rectiliniu într-un mediu lichid rezistent, cu acceleraţia 2(1 )a v= − . Să se reprezinte diagrama vitezei şi să se calculeze după cât timp particula atinge viteza de 0,5 m/s. Rezolvare : 1) 1GLN = . Particula are un grad de libertate, deplasându-se într-o mişcare rectilinie.
2) Presupunem axa Oy ca dreaptă suport a traiectoriei şi alegând poziţia iniţială ca origine, se consideră parametrul cinematic ( )y y t= corespunzător gradului de libertate stabilit.

Cinematica A. Vasilescu 46
3) Problema este atipică, nu se încadrează în nici unul dintre tipurile clasice (problemă directă, inversă sau mixtă).
4) Strategia de abordare porneşte de la elementele din enunţ. Singura cale de urmat este aceea de a considera relaţia din enunţ ca o ecuaţie diferenţială de ordinul întâi, în care acceleraţia se pune sub forma :a v= . Se consideră deci
ecuaţia diferenţială scrisă sub forma : 2(1 )v v= − sau separând variabilele v
şi t 21dv dt
v=
− care după integrare are expresia
1ln 1 2v t K− = − + . Constanta de integrare 1 0K = se află din condiţia iniţială : 0t = , (0) 0v = (particula porneşte din repaus). Se obţine expresia finală a vitezei, după înlocuirea constantei de integrare : 21 tv e−− = . Pentru explicitarea modulului
se ţine cont că viteza iniţială este nulă şi atunci 1 1v v− = − , adică se consideră
că viteza 1v < (m/s). Expresia vitezei în raport cu timpul este : 21 tv e−= −
care poate fi folosită pentru aflarea timpului 1t , după care viteza are valoarea
1 1( ) 0,5 m/sv v t= = . Rezultă 1 ln 2 0,347 st = . Diagrama vitezei este reprezentată în figura 1.34.
5) Discuţie : se observă că pentru cazul teoretic în care timpul va tinde spre infinit, viteza va tinde spre valoarea de 1m/s. Din diagrama vitezei se constată că după numai două secunde viteza are o valoare de 0,982 m/s, foarte apropiată de 1 m/s.
00.20.40.60.8
11.2
0 0.5 1 1.5 2 2.5
Timp (s)
Vite
za (m
/s)
Fig. 1.34.

Cinematica punctului Verificaţi-vă cunoştinţele
47
Problema 1.4. Un punct M se deplasează pe semicercul AB de rază R şi centrul O, astfel încât proiecţia vitezei sale pe diametrul AB este u, constantă tot timpul mişcării.
Să se studieze mişcarea pentru intervalul de timp 20 Rtu
≤ ≤ în care punctul
parcurge arcul de la A la B (fig. 1.35). Rezolvare : 1) Punctul se deplasează pe un cerc. În acest caz, punctul are un singur grad de libertate. Se consideră ca parametru al mişcării, unghiul format de diametrul semicercului AB , cu raza OM : AOMθ = (fig 1.35).
2) Tipul de problemă : mixtă (după ce se scrie relaţia dintre viteză şi
proiecţia ei : / sinv u θ= , viteza punctului este cunoscută).
3) Pentru rezolvarea problemei, se aplică strategia indicată în tabelul 1.1.
Se începe cu aflarea vitezei unghiulare : sin
v uR R
θθ
= = , apoi se continuă cu
stabilirea proiecţiilor acceleraţiei în triedrul lui Frenet. Prin derivarea vitezei, se calculează proiecţia acceleraţiei după direcţia tangentei :
2
2 3cos cossin sin
ua v uRτ
θ θθθ θ
= = − = − ;
Urmează aflarea proiecţiei acceleraţiei pe direcţia normalei principale :
2 2
2sinv uaR Rν θ
= = .
Rezultă mărimea acceleraţiei :
2
2 23sin
ua a aRτ ν θ
= + = şi se calculează
unghiul pe care îl face direcţia vectorului a cu direcţia normalei principale :
2
3
2
2
coscossintg ctgsin
sin
ua Ra u
R
τ
ν
θθθϕ θθ
θ
−= = = − = − .
Fig. 1.36.
A
M
O ϕ
θ
τ
aν
B ν
a
aτ
θ
Fig. 1.35. A
M
O u θ
v
R
B

Cinematica A. Vasilescu 48
În concluzie, vectorul acceleraţie are expresia : 2
2 2 tgsinua
Rτ νθθ
= ⋅ − +
În figura 1.36 sunt reprezentate cele două proiecţii ale acceleraţiei, precum şi acceleraţia a care va avea tot timpul mişcării pe arcul AB , direcţia normală pe aceea a diametrului AB . Pentru a determina legea de variaţie a unghiului ( )tθ θ= , se revine asupra relaţiei stabilite la începutul aplicaţiei :
sinu
Rθ
θ= .
Se separă variabilele şi se integrează :
sin ud dt CR
θ θ⋅ = +∫ ∫
şi se obţine
cos u t CR
θ− = + .
Constanta de integrare C se determină din condiţiile iniţiale : 0t = şi (0) 0θ =
cos0 0u CR
− ° = ⋅ +
de unde rezultă 1C = − . În final există relaţia :
cos 1 u tR
θ = −
care arată domeniul de valori pentru timpul t din condiţia :
1 1 1u tR
− ≤ − ≤ ,
din care decurge că 20 utR
≤ ≤ ,
verificându-se condiţia din enunţul problemei.

Capitolul 2 Cinematica solidului rigid
49
CCaappiittoolluull 22 CCIINNEEMMAATTIICCAA SSOOLLIIDDUULLUUII RRIIGGIIDD
CUVINTE CHEIE
Distribuţii de viteze. Distribuţii de acceleraţii. Formula fundamentală a cinematicii rigidului (Euler). Teorema proiecţiilor vitezelor. Teorema coliniarităţii extremităţilor vectorilor viteză. Mişcări particulare ale rigidului : simple şi compuse. Mişcarea de translaţie. Mişcarea de rotaţie. Mişcarea elicoidală : axa mişcării elicoidale; mişcarea de şurub. Mişcarea plan-paralelă (plană) : centrul instantaneu de rotaţie; bază şi rostogolitoare; polul acceleraţiilor. Mişcarea rigidului cu punct fix : axa instantanee de rotaţie; conurile lui Poinsot (conul polodic şi conul herpolodic). Mişcarea generală a rigidului : axa instantanee a mişcării elicoidale; axoidă fixă, axoidă mobilă. Analogia statico-cinematică.
ω
(∆ )
P

Cinematica A. Vasilescu
50
NNoottaaţţiiii
a acceleraţie aν, aτ acceleraţie normală, acceleraţie tangenţială vω invariant scalar ;
proiecţia vitezei v , pe direcţia vectorului ω x, y, z coordonate carteziene
, ,x y z proiecţiile ortogonale ale vitezei , ,x y z proiecţiile ortogonale ale acceleraţiei ,ε θ acceleraţie unghiulară
ϕ unghi format de acceleraţia a cu componenta normală aν θ unghi (de rotaţie) ρ, θ coordonate polare ξ, η; ξ1, η1, coordonate ortogonale ale centrului instantaneu de rotaţie
,ω θ viteză unghiulară
, , ,...OM v ω mărimi vectoriale
, ,i j k versorii axelor sistemului de referinţă solidar rigidului
1 1 1, ,i j k versorii axelor sistemului de referinţă fix
r vector de poziţie ,OMu uω versorul vectorului OM , versorul vectorului ω
v , Mv , Ov viteză ; viteza absolută a punctului oarecare M al rigidului ; viteza originii O a sistemului de referinţă solidar rigidului
, ,τ ν β versorii axelor în triedrul lui Frenet v,vO matrice coloană (3 1× ) asociate vectorilor , Ov v a,aO matrice coloană (3 1× ) asociate vectorilor , Oa a
ˆˆ[ ], [ ]ω ε matrice antisimetrice (3 3× ) asociate vectorilor , ω ε

Cinematica solidului rigid Elemente generale ale mişcării rigidului
51
2.1. ELEMENTE GENERALE ALE MIŞCĂRII RIGIDULUI 2.1.1. Generalităţi
Mişcarea unui rigid este cunoscută când există posibilitatea să se cunoască mişcarea oricărui punct al său în raport cu un anumit sistem de referinţă x1O1y1 presupus fix. Practic nu este necesar şi nici posibil să se descrie mişcarea rigidului prin mişcarea fiecăruia din punctele sale. Cum ipoteza de rigiditate există, adică distanţele relative între punctele rigidului rămân constante, este suficient să se cunoască în fiecare moment poziţiile exacte numai a unor puncte, din care se determină poziţiile celorlalte. Rezultă că este util să considerăm un sistem de referinţă xOy solidar rigidului, în raport cu care poziţionăm punctele corpului. În mod asemănător se poate studia şi modul de variaţie a vitezelor şi a acceleraţiilor punctelor solidului în raport cu acelaşi sistem de referinţă. Aceste legile de variaţie pentru vitezele şi acceleraţiile punctelor, funcţie de poziţia acestora în interiorul solidului rigid (şi nu funcţie de timp) poartă numele de distribuţii de viteze şi respectiv, distribuţii de acceleraţii. Stabilirea acestor distribuţii se face pornind de la exprimarea poziţiei unui punct curent M al solidului în raport cu cele două sisteme de referinţă (fig. 2.1). Astfel, vectorul de poziţie pentru punctul M se scrie : 1( ) ( ) ( ) ( )o or t r t r t r t xi yj zk= + = + + + (2.1) Coordonatele cunoscute x, y, z ale punctului rămân constante în timpul mişcării. Necunoscutele problemei sunt în acest caz numai funcţiile vectoriale ( )or t (originea sistemului mobil, sistem solidar rigidului şi care se deplasează evident, împreună cu acesta) şi versorii axelor sistemului mobil )( ),( ),( tktjti .
M(x1,y1,z1) (x, y, z)
O1
y
z z1
y1 xx1
j k
i
i1
k1
j1
ro
r r1
Fig. 2.1.
O

Cinematica A. Vasilescu
52
2.1.2. Distribuţia vitezelor Derivarea în raport cu timpul a relaţiei (2.1) conduce la stabilirea vitezei punctului M în raport cu sistemul de referinţă fix : 1 ( ) ( )M ov r r t r t= = + (2.2) Derivata vectorului de poziţie a punctului O în raport cu timpul reprezintă viteza sa : ( ) ( )o Or t v t= (2.3) În continuare se scrie
( )r t xi yj zk= + + (2.4) deoarece 0x = , 0y = , 0z = .
Ţinând cont că proiecţia unui vector oarecare a pe o axă de versor u este dată de produsul scalar ua • , cele nouă proiecţii ale versorilor i , j şi k pe axele Ox, Oy şi Oz formază matricea
i i i j i k
j i j j j k
k i k j k k
• • •
• • •
• • •
(2.5)
Considerând relaţiile 1 1 1i i j j k k• = • = • = (2.6) 000 =•=•=• ikkjji (2.7) şi derivându-le în raport cu timpul, se obţin
0 0 0i i j j k k• = • = • = (2.8)
0 0 0i j i j j k j k k i k i• + • = • + • = • + • = (2.9) Se fac notaţiile următoare :
z
x
y
i j i j
j k j k
k i k i
ω
ω
ω
• = − • =
• = − • =
• = − • =
(2.10)
unde xω , yω şi zω sunt proiecţiile unui vector
kji zyx ωωωω ++= (2.11)

Cinematica solidului rigid Elemente generale ale mişcării rigidului
53
Ca urmare, matricea (2.5) este o matrice antisimetrică în raport cu diagonala principală :
00
0
xy
xz
yz
ωωωωωω
−−
− (2.12)
Deci, se deduce că expresia analitică pentru derivata versorului i în raport cu timpul are forma : ( ) ( ) ( ) z yi i i i i j j i k k j kω ω= • + • + • = − (2.13) Este util de arătat că relaţia (2.13) rezultă dintr-un produs vectorial
kjkji
i yzzyx ωωωωωω −==×001
(2.14)
şi deci :
i i
j j
k k
ω
ω
ω
= ×
= ×
= ×
(2.15)
Formulele (2.15) sunt cunoscute ca formulele lui Poisson. În final, relaţia (2.4) capătă forma
( ) ( ) ( )r xi yj zk x i y j z k
xi yj zk rω ω ω
ω ω ω ω= + + = × + × + × =
= × + × + × = ×
r rω= × , (2.16) iar expresia vitezei (1.2) devine : M Ov v rω= + × (2.17) Expresia (2.17) este cunoscută ca formula lui Euler pentru distribuţia de viteze şi reprezintă de fapt formula fundamentală a cinematicii rigidului. Proiectând viteza punctului M pe axele mobile, se obţine x y zv v i v j v k= + + şi folosind determinantul simbolic pentru produsul vectorial, această expresie are forma :

Cinematica A. Vasilescu
54
Ox Oy Oz x y z
i j kv v i v j v k
x y z
ω ω ω= + + +
sau
x Ox y z
y Oy z x
z Oz x y
v v z y
v v x z
v v y x
ω ω
ω ω
ω ω
= + − = + − = + −
(2.18)
Relaţia (2.18) mai poate fi scrisă şi sub formă matriceală : [ ] ˆOv v rω= + (2.19) unde v , Ov şi r sunt matrici coloană, iar [ ]ω este matricea antisimetrică 3 3× asociată vectorului ω . Relaţia (2.19) poate fi scrisă dezvoltat pentru a verifica concordanţa cu relaţia (2.18) :
0
00
z yx Ox
y Oy z x
y xz Oz
v v xv v y
zv v
ω ω
ω ωω ω
− = + − −
(2.20)
Cu formula lui Euler pot fi stabilite o serie de proprietăţi ale distribuţiilor vitezelor punctelor unui solid rigid aflat într-o mişcare generală :
Proprietatea 1. Vectorul ω este acelaşi în orice punct al rigidului.
Demonstraţie. Se aleg trei puncte oarecare necoliniare O, M, N ale rigidului. Unghiul format de cei doi vectori OMrM = şi ONrN = rămâne constant (solidul este prin ipoteză considerat rigid) : Crr NM =• Derivând în raport cu timpul relaţia de mai sus, rezultă : 0M N M Nr r r r• + • = (2.21) Derivatele vectorilor Mr şi Nr se obţin aplicând relaţia (2.16) : 1M Mr rω= × 2N Nr rω= ×

Cinematica solidului rigid Elemente generale ale mişcării rigidului
55
unde 1ω şi 2ω sunt doi vectori arbitrari. Relaţia (2.21) devine :
0)()( 21 =•×+•× MNNM rrrr ωω (2.22) Ţinând cont de proprietăţile produsului mixt, se pot scrie de altfel : 0)()( 21 =•×−•× ωω NMNM rrrr de unde 0)()( 21 =−•× ωωNM rr Produsul vectorial 0≠× NM rr (punctele O, M, N sunt necoliniare prin ipoteză) şi atunci 021 =−ωω sau ωωω == 21 , ceea ce era de demonstrat.
Proprietatea 2. Vectorul ω nu depinde de alegerea originii sistemului de referinţă mobil, adică ω este un invariant faţă de axele solidare rigidului.
Demonstraţie. Pentru început se consideră viteza unui punct oarecare M al solidului în triedrul mobil T : OMvv OM ×+= ω (2.23) În al doilea rând se alege originea unui alt triedru mobil T′ şi se admite un vector
'ω în acest caz. Prin urmare, viteza punctului M va fi : MOvv OM ''' ×+= ω . Dar punctul O′ are o viteză în raport cu triedrul T : '' OOvv OO ×+= ω şi rezultă : MOOOvv OM ''' ×+×+= ωω (2.24) Relaţiile (2.23) şi (2.24) exprimă aceiaşi viteză a punctului M de unde MOOOOM ''' ×+×=× ωωω sau ( ) 0''' =×−−× MOOOOM ωω Dar MOOOOM '' =− şi se obţine ( ) 0'' =×− MOωω . La final avem 'ωω = deoarece punctul M a fost ales arbitrar.
Observaţia 1. Primele două proprietăţi arată că vectorul ω este un invariant vectorial în raport cu triedrul mobil T.
Proprietatea 3. Proiecţiile vitezelor a două puncte din solid pe dreapta care le uneşte, sunt egale şi de acelaşi sens. (Teorema proiecţiilor vitezelor)

Cinematica A. Vasilescu
56
Demonstraţie. Se consideră punctele M şi O (originea triedrului solidar rigidului) şi viteza punctului M scrisă sub forma (2.23). Ţinând cont că proiecţia vitezei punctului M pe direcţia OM este dată de produsul scalar dintre viteza
Mv şi versorul lui OM (OMOMuOM = ), se multiplică scalar (2.23) cu OMu :
OMOMOOMM uOMuvuv •×+•=• )(ω Evident, produsul mixt din relaţia anterioară este zero şi atunci rezultă
.constuvuv OMOOMM =•=• Deci proiecţiile vitezelor punctelor considerate sunt egale (fig. 2.2) : .coscos constvv OM == βα
Proprietatea 4. Extremităţile vectorilor viteză ai unor puncte coliniare dintr-un solid aflat într-o mişcare generală, sunt la rândul lor coliniare. (Teorema coliniarităţii extremităţilor vectorilor viteză)
Demonstraţie. Se consideră punctele coliniare O, M1, M2 ale unui solid şi punctele A, A1, A2 ca fiind extremităţile vectorilor viteză Ov , 1v , 2v (fig. 2.3.). Vitezele 1v , 2v au expresiile :
1 1
2 2
O
O
v v OM
v v OM
ω
ω
= + ×
= + × (2.25)
unde vectorii de poziţie 1OM şi 2OM pot fi exprimaţi ca sume geometrice (fig. 2.3) : 11111 vAAvMAAAOAOM O −+=++=
22222 vAAvMAAAOAOM O −+=++= Ţinând cont de relaţiile (2.25), expresiile anterioare capătă forma : 111 OMAAOM ×−= ω (2.26)
Fig. 2.3.
M1
O
A2
M2
A A1
v2 vO v1
O M
vO
α β vM
Fig. 2.2.

Cinematica solidului rigid Elemente generale ale mişcării rigidului
57
222 OMAAOM ×−= ω (2.27) Cele trei puncte O, M1, M2 sunt coliniare dacă 21 OMOM ⋅= λ . (2.28) Se deduce din (2.26) şi din (2.27) substituind în ecuaţia (2.28) : ( )2211 OMAAOMAA ×−⋅=×− ωλω sau )( 2121 OMOMAAAA ⋅−×−⋅= λωλ Dar 021 =⋅− OMOM λ în virtutea relaţiei (2.28). Rezultă 21 AAAA ⋅= λ , adică cele trei puncte A, A1, A2 sunt coliniare.
Proprietatea 5. Proiecţiile vitezelor diferitelor puncte ale unui solid rigid aflat într-o mişcare generală, pe direcţia vectorului ω sunt constante.
Demonstraţie. Fie M, N două puncte oarecare ale rigidului. Se aplică formula fundamentală a cinematicii rigidului (2.17) sub forma : MNvv MN ×+= ω şi se multiplică scalar relaţia de mai sus cu versorul vitezei unghiulare ωu :
ωωωω ω uvuMNuvuv MMN •=•×+•=• )(
Produsul mixt 0)( =•× ωω uMN deoarece cei doi vectori ω et ωu sunt paraleli (fig. 2.4) şi astfel relaţia obţinută exprimă egalitatea proiecţiilor vitezelor pe direcţia vectorului ω .
Observaţia 2. Această proprietate arată că nu există puncte de viteză nulă în mişcarea generală a rigidului. Observaţia 3. Dacă vectorii v şi ω sunt perpendiculari într-un punct, proprietatea rămâne valabilă pentru toate punctele rigidului.
Fig. 2.4.
M N uω
vN
vM
vN • uω
vM • uω
ω

Cinematica A. Vasilescu
58
Observaţia 4. Distribuţia de viteze în mişcarea generală a rigidului, are un al doilea invariant (invariantul scalar) şi anume : proiecţia vitezei v pe direcţia vectorului ω :
ω
ωω
•= vv (2.29)
Proprietatea 6. Punctele dintr-un rigid aflat într-o mişcare generală şi care sunt situate pe o dreaptă paralelă cu direcţia vectorului ω au aceiaşi viteză.
Demonstraţie. Se consideră M, P două puncte pe o dreaptă paralelă cu direcţia vectorului ω (fig. 2.5). Vectorul de poziţie OP poate fi scris considerând suma geometrică : ωuMPOMMPOMOP ⋅+=+= (2.30) Vitezele punctelor considerate sunt : OMvv OM ×+= ω
( ) OMvuMPOMvOPvv OOOP ×+=⋅+×+=×+= ωωω ω şi prin urmare, PM vv = . Proprietatea 6 este utilă pentru studiul diferitelor mişcări particulare ca : mişcarea de rotaţie, mişcarea elicoidală, etc.
APLICAŢIA 2.1. Un cub de latură dată l se găseşte într-o mişcare astfel încât viteza punctului A este nulă, viteza punctului B este în lungul muchiei BC, iar viteza punctului G se află în planul xOy (fig. 2.6). Să se determine Gv , ω şi Ov funcţie de Bv .
Fig. 2.5.
M
P
uω
vP
vM
ω
O
vO
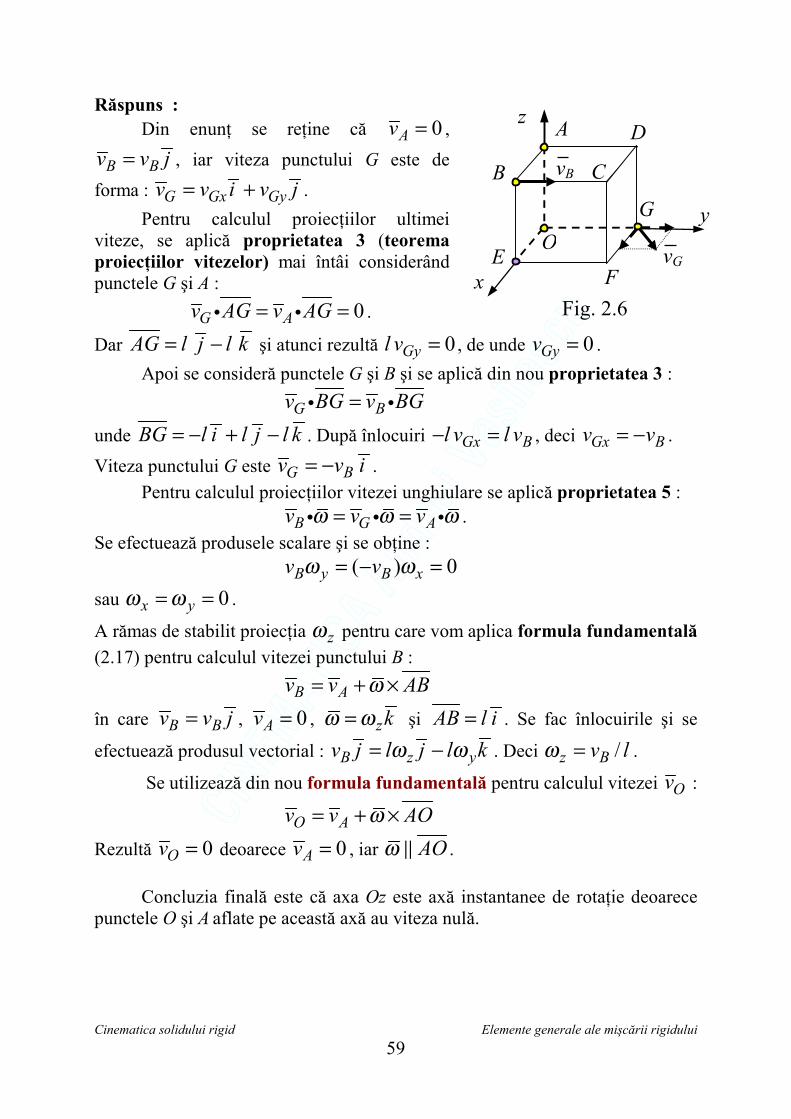
Cinematica solidului rigid Elemente generale ale mişcării rigidului
59
Răspuns : Din enunţ se reţine că 0Av = ,
B Bv v j= , iar viteza punctului G este de forma : G Gx Gyv v i v j= + . Pentru calculul proiecţiilor ultimei viteze, se aplică proprietatea 3 (teorema proiecţiilor vitezelor) mai întâi considerând punctele G şi A : 0G Av AG v AG= = .
Dar AG l j l k= − şi atunci rezultă 0Gyl v = , de unde 0Gyv = . Apoi se consideră punctele G şi B şi se aplică din nou proprietatea 3 : G Bv BG v BG=
unde BG l i l j l k= − + − . După înlocuiri Gx Bl v l v− = , deci Gx Bv v= − . Viteza punctului G este G Bv v i= − . Pentru calculul proiecţiilor vitezei unghiulare se aplică proprietatea 5 : B G Av v vω ω ω= = . Se efectuează produsele scalare şi se obţine : ( ) 0B y B xv vω ω= − =
sau 0x yω ω= = .
A rămas de stabilit proiecţia zω pentru care vom aplica formula fundamentală (2.17) pentru calculul vitezei punctului B : B Av v ABω= + ×
în care B Bv v j= , 0Av = , zkω ω= şi AB l i= . Se fac înlocuirile şi se
efectuează produsul vectorial : B z yv j l j l kω ω= − . Deci /z Bv lω = .
Se utilizează din nou formula fundamentală pentru calculul vitezei Ov :
O Av v AOω= + ×
Rezultă 0Ov = deoarece 0Av = , iar AOω . Concluzia finală este că axa Oz este axă instantanee de rotaţie deoarece punctele O şi A aflate pe această axă au viteza nulă.
Fig. 2.6
y
z
O
A
x
B C
D
E
G
F vG
vB

Cinematica A. Vasilescu
60
2.1.3. Distribuţia acceleraţiilor Acceleraţia punctului M se obţine derivând formula lui Euler (2.17) : Oa v v r rω ω= = + × + × (2.31)
Notând : O Ov a= , x y zi j kω ε ω ω ω= = + + , r rω= × se obţine formula lui Euler pentru distribuţia acceleraţiilor : )( rraa O ××+×+= ωωε (2.32) Proiecţiile acceleraţiei punctului M pe axele mobile sunt :
2 2
2 2
2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x Ox y z x y z x z y
y Oy z x y z x y x z
z Oz x y z x y z y x
a a x y z
a a y z x
a a z x y
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
= − + + − + +
= − + + − + +
= − + + − + +
(2.33)
Observaţia 1. Se pot afla coordonatele punctului care are acceleraţia nulă la un moment dat scriind 0x y za a a= = = . Din relaţiile (2.33) se obţine un sistem de ecuaţii algebrice liniare neomogene cu necunoscutele , ,x y z . Se poate arăta
că determinantul acestui sistem este 2( ) .ω ε∆ = − × În mod general, vectorii ω şi ε nu sunt coliniari, adică 0∆ ≠ şi atunci există un singur punct care la un moment dat are acceleraţia nulă. Acest punct poartă numele de polul acceleraţiilor.
Observaţia 2. Relaţia (2.32) mai poate fi scrisă sub formă matriceală
[ ] [ ] 20 ˆ ˆa a r rε ω= + + (2.34)
unde a şi 0a sunt matrice coloană, iar [ ]ω şi [ ]ε sunt matricele antisimetrice 3 3× asociate respectiv vectorilor ω şi ε . Relaţia (2.34) se poate scrie sub formă dezvoltată, stabilindu-se la final concordanţa cu relaţiile (2.33) :
20 0
0 00 0
z y z yx Ox
y Oy z x z x
y x y xz Oz
a a x xa a y y
z za a
ε ε ω ω
ε ε ω ωε ε ω ω
− − = + − + − = − −
2 2
2 2
2 2
0
00
y z x y x zz yOx
Oy z x y x z x y z
y xOz z x z y x y
a x xa y y
z za
ω ω ω ω ω ωε ε
ε ε ω ω ω ω ω ωε ε ω ω ω ω ω ω
− −− + − + − − − − −

Cinematica solidului rigid Mişcări particulare ale rigidului
61
2.2. MIŞCĂRI PARTICULARE ALE RIGIDULUI Distribuţia vitezelor într-un solid rigid având o mişcare oarecare (numită şi mişcare generală) este dată de formula lui Euler (2.17). M Ov v rω= + × (2.17) Importanţa acestei formule în demonstrarea proprietăţilor distribuţiilor de viteze a făcut să i se dea şi denumirea de formula fundamentală a cinematicii solidului rigid. În acest caz al mişcării generale, între vectorii ov şi ω nu există condiţionări, aceştia având direcţii oarecari. Prin urmare, în funcţie de variaţia în timp a direcţiilor şi scalarilor acestor vectori, precum şi eventuala anulare a lor, se poate face o clasificare a mişcărilor rigidului după criteriul prezenţei sau absenţei restricţiilor între aceşti vectori în mişcare particulară şi respectiv, mişcare generală. Mişcarea particulară poate fi simplă, atunci când unul din cei doi vectori ov sau ω este nul, sau compusă, atunci când se impun restricţii privind direcţiile suporturilor celor doi vectori ov şi ω . Mişcările particulare simple (elementare) sunt numai două :
• Translaţia ( 0Ov ≠ şi 0ω = ) ; • Rotaţia ( 0Ov = şi 0ω ≠ , vectorul ω are direcţie fixă în spaţiu).
Mişcările particulare compuse care vor fi studiate sunt :
• Mişcarea elicoidală ( 0Ov ≠ şi 0ω ≠ , ω ε şi Ov ,ω coliniari cu o axă fixă ∆) ;
• Mişcarea plan-paralelă (plană) ( 0Ov ≠ şi 0ω ≠ , Ov ω⊥ şi
Ov ∈unui plan fix ) ; • Mişcarea rigidului cu punct fix ( 0Ov = , 0ω ≠ şi 0ε ≠ ; ω şi ε
au direcţii arbitrare). Dintre mişcările particulare compuse (care pot fi imaginate într-un număr foarte mare) se vor studia deci numai trei dintre acestea şi anume, cele care intervin în aplicaţiile elemenare şi de regulă cele mai importante în dinamica solidului sau sistemelor de solide rigide.

Cinematica A. Vasilescu
62
Exemplu : Câteva dintre aceste tipuri de mişcări vor fi ilustrate printr-un exemplu : în figura 2.7 este reprezentată schematic o maşină compusă dintr-un piston P, două manivele O1A şi O2B, o bară de legătură AB şi o bielă BC. Se presupune că batiul maşinii este imobil. Atunci când maşina funcţionează, se observă că toate particulele materiale care acătuiesc pistonul au aceiaşi mişcare. Acest tip de mişcare este numită translaţie rectilinie deoarece fiecare punct al pistonului descrie câte o dreaptă.
Dacă se consideră bara de legătură AB, se observă că aceasta rămâne
paralelă cu direcţia fixă O1O2, iar punctele barei descriu traiectorii circulare de aceiaşi rază. Se spune că bara AB are o mişcare de translaţie circulară.
Manivelele O1A şi O2B se rotesc în jurul unor axe fixe care sunt
determinate de poziţiile palierelor O1 şi O2. Mişcarea solidului în jurul unei axe fixe este numită mişcare de rotaţie.
Biela BC are o mişcare mai complicată constând într-o mişcare de rotaţie
asociată cu o mişcare de translaţie. Pe parcursul mişcării, extremitatea B a bielei descrie o traiectorie circulară de rază O2B, în timp ce extremitatea C rămâne pe dreapta O2C. Fiecare punct al bielei are o traiectorie plană, de formă diferită şi în acest caz mişcarea este denumită mişcare plană. Este evident că translaţiile pistonului şi ale barei de legătură, precum şi rotaţia manivelelor sunt cazuri particulare ale mişcării plane.
În continuare se vor studia în detaliu aceste tipuri de mişcări, începând cu
cea mai simplă dintre ele, adică cu mişcarea de translaţie.
A
C P O2
B
O1
Fig. 2.7.

Cinematica solidului rigid Mişcări particulare ale rigidului
63
2.2.1. Mişcarea de translaţie
Definiţie :
Un solid rigid execută o mişcare de translaţie dacă o dreaptă oarecare, aparţinând acestuia, rămâne tot timpul mişcării paralelă cu ea însăşi.
Din definiţia acestei mişcări rezultă că axele sistemului de referinţă mobil rămîn paralele cu nişte direcţii fixe din spaţiu şi atunci punctele solidului descriu traiectorii identice, pe curbe paralele (fig. 2.8). După forma traiectoriilor punctelor solidului, mişcarea de translaţie poate fi rectilinie (mişcarea unui piston, a unui sertar sau a unui ascensor) sau curbilinie (mişcarea scaunului unui scrînciob). Dacă axele sistemului de referinţă mobil Oxyz rămân paralele cu trei direcţii fixe din spaţiu atunci
i j k= = . (2.35) Din formulele lui Poisson (2.15) este evident că viteza unghiulară este nulă în acest caz. Mişcarea solidului rigid este cunoscută, dacă se cunoaşte mişcarea punctului O, adică este cunoscut vectorul de poziţie ( )or t definit în raport cu sistemul de referinţă fix. În acest mod, stabilim că mişcarea de translaţie a solidului rigid are trei grade de libertate (ca şi mişcarea punctului O considerat liber). Particularizarea relaţiilor (2.17) şi (2.32) în care se introduce 0ω = , M Ov v= ; M Oa a= (2.36) conduce la concluzia că toate punctele rigidului au aceiaşi viteză şi aceiaşi acceleraţie la un moment dat (fig. 2.8).
a3
a1 a2
v1 v2
v3
v1
v1
v2
v2
v3
v3
a2 a2
a1
a1
a3
a3
Fig. 2.8.

Cinematica A. Vasilescu
64
2.2.2. Mişcarea de rotaţie
Definiţie :
Un solid rigid execută o mişcare de rotaţie dacă două puncte ale sale rămân tot timpul mişcării fixe. Cele două puncte definesc axa mişcării de rotaţie.
Se consideră punctele fixe O1 şi O2 ale solidului şi se alege un sistem de referinţă fix x1O1y1z1 având axa O1z1 în coincidenţă cu axa de rotaţie care trece prin cele două puncte fixe (fig. 2.9). Sistemul de referinţă solidar rigidului se alege cu originea O în punctul O1 şi cu axa Oz suprapusă peste axa O1z1. Cele două puncte fixe pot fi considerate, din punctul de vedere al legăturilor, ca fiind două articulaţii (una sferică şi respectiv, una cilindrică ca în figura 2.9). Este limpede că 0Or = şi prin urmare
0Ov = şi 0Oa = . Poziţia unui punct oarecare M este dată de vectorul de poziţie 1r r= (2.37)
Traiectoria acestui punct este un cerc aflat într-un plan normal la axa de rotaţie, având centrul O' şi raza d. Se poate face următoarea afirmaţie referitoare la traiectoriile punctelor solidului : punctele unui solid rigid aflat în mişcare de rotaţie descriu traiectorii circulare, în plane normale pe axa de rotaţie, cu centrele pe această axă.
Mişcarea rigidului este definită dacă se cunoaşte unghiul pe care îl formează axele mobile cu cele fixe (Ox cu O1x1 şi respectiv Oy cu O1y1) :
( )tθ θ= . Spunem că solidul rigid în mişcarea de rotaţie are un grad de libertate, parametrul cinematic care îl defineşte fiind funcţia scalară ( )tθ θ= . Versorii sistemului de referinţă mobil se proiectează pe direcţiile axelor fixe, stabilinâd expresiile lor funcţie de versorii sistemului de referinţă fix ( 1i ,
1j şi 1k ) prin intermediul unghiului ( )tθ θ= (fig. 2.10) :
1 1cos sini i jθ θ= ⋅ + ⋅ ; 1 1sin cosj i jθ θ= − ⋅ + ⋅ ; 1k k= (2.38)
Fig. 2.9.
d
M
O2
v
x x1
y1
O′
z ≡ z1
y
ω
O1= O k
i
j
θ
θ

Cinematica solidului rigid Mişcări particulare ale rigidului
65
Derivatele versorilor mobili ( i , j şi k ) în raport cu timpul se stabilesc :
1 1
1 1
sin cos ;
cos sin ;
0.
i i j j
j i j i
k
θ θ θ θ θ
θ θ θ θ θ
= − ⋅ + ⋅ = = − ⋅ − ⋅ = −
= (2.39)
Proiecţiile vectorului ω din relaţia (2.11) au fost considerate în funcţie de derivatele versorilor mobili, derivate care au fost stabilite pentru mişcarea de rotaţie de mai sus. Considerând relaţiile (2.10), se calculează :
0
0x
y
z
j k i k
k i
i j j j
ω θ
ω
ω θ θ
= • = − • = = • =
= • = • =
(2.40)
şi se obţine că pentru mişcarea de rotaţie a solidului rigid, vectorul zk kω ω θ= = . (2.41) Acest vector are direcţia axei de rotaţie şi mărimea egală cu derivata unghiului θ. Ca urmare semnificaţia fizică este cea a vitezei unghiulare θ ω= . Aşa cum s-a arătat la proprietăţile distribuţiilor de viteze, în mişcarea generală a solidului rigid, ω este acelaşi pentru toate punctele solidului în orice clipă şi acestuia i se poate conferi rolul de invariant vectorial la studiul distribuţiilor de viteze. Derivând vectorul viteză unghiulară în raport cu timpul, se obţine vectorul acceleraţie unghiulară : kε ω θ= = (2.42) Vectorii ω şi ε sunt coliniari tot timpul mişcării, având direcţie fixă. Studiul distribuţiei de viteze pentru acest tip de mişcare particulară se stabileşte din analizarea proiecţiilor şi mărimii vectorului viteză :
0 0M
i j kv r yi xj
x y zω ω ω ω= × = = − + (2.43)
2 2Mv x y dω ω= + = (2.44)
θ
Fig. 2.10.
y θ
j1 x i j
i1 O
x1
y1

Cinematica A. Vasilescu
66
Interpretarea relaţiilor (2.43) şi (2.44) conduce la enunţarea proprietăţilor distribuţiilor de viteze în mişcarea de rotaţie a solidului rigid : P1. În mişcarea de rotaţie există puncte de viteză nulă care se află pe axa de
rotaţie, deoarece acestea au coordonatele 0x = şi 0y = . P2. Vitezele punctelor solidului rigid sunt conţinute în plane normale la axa
de rotaţie, deoarece proiecţia vitezei oricărui punct pe axa Oz este nulă ( 0zv = ). În figura 2.11, a viteza punctului M se află în planul normal care intersectează axa de rotaţie în punctul O.
P3. Pe o dreaptă (∆) paralelă cu axa de rotaţie, vitezele sunt vectori echipolenţi (fig 2.11, a). Explicaţia constă în faptul că expresia vitezei nu conţine cota z, iar punctele aflate pe axa (∆) paralelă cu axa de rotaţie Oz au aceleaşi coordonate x şi y.
P4. Pe o dreaptă (∆1) care intersectează axa de rotaţie, vitezele au o variaţie liniară fiind perpendiculare pe acea dreaptă, iar modulele lor sunt direct proporţionale cu distanţa de la punct la axa de rotaţie (fig 2.11, a).
Pentru a arăta că vitezele au o variaţie liniară pe o dreaptă care intersectează axa de rotaţie, se consideră punctul M(xM,0,0) aflat pe axa Ox. Din relaţia (2.43) se obţine expresia vectorială Mv xjω= din care se observă că viteza variază direct proporţional cu distanţa x la axa de rotaţie (vârfurile vectorilor viteză fiind pe o dreaptă a cărei pantă este viteza unghiulară ω), iar direcţia vitezelor este paralelă cu axa Oy sau mai bine spus, vitezele sunt perpendiculare pe dreapta OM. Vitezele punctelor solidului rigid aflate pe dreapta (∆1) care trece prin punctele M şi N (utimul punct se află pe axa de rotaţie) au tot o variaţie liniară, deoarece se aplică a treia proprietate, vitezele punctelor A şi A' fiind egale (fig. 2.11, a).
Fig. 2.11.
A
xa d
e ro
taţie
(∆) ε
aτ
O ϕ
z
x (b)
aν
aM
M ω
A
xa d
e ro
taţie
(∆)
ω
(∆1)
vM O
M
N z
x (a)
A
A'

Cinematica solidului rigid Mişcări particulare ale rigidului
67
Distribuţia de acceleraţii se obţine pornind de la formula lui Euler (2.32) în care 0Oa = : ( )a r rε ω ω= × + × × (2.45) OBSERVAŢIE
Cei doi termeni ai acceleraţiei au următoarele semnificaţii : termenul rε × reprezintă componenta tangenţială a acceleraţiei, iar termenul
2( )r rω ω ω× × = − reprezintă componenta normală, deoarece vectorii ω şi ε sunt coliniari cu axa de rotaţie (fig. 2.12).
Proiecţiile acceleraţiei se determină din relaţia (2.45)
0 0 0 00
i j k i j ka
x y z y xε ω
ω ω= +
−
de unde
2
2
;
;
0.
x
y
z
a y x
a x y
a
ε ω
ε ω
= − − = − =
(2.46)
2 2 2 2
2 2 2 4 2 4
( ) ( )
( )( )
a y x x y
x y d
ε ω ε ω
ε ω ε ω
= + + − =
= + + = + (2.47)
2tgaa
τ
ν
εϕω
= = (2.48)
Proprietăţile distribuţiei de acceleraţii sunt analoage cu cele ale distribuţiei de viteze (fig. 2.11,b). Singura deosebire este că acceleraţiile sunt înclinate faţă de o dreaptă care intersectează axa de rotaţie cu unghiul
constϕ = dat de relaţia (2.48).
2a rν ω= −
a rτ ε= × a
ϕ
Fig. 2.12.
M ε

Cinematica A. Vasilescu
68
APLICAŢIA 2.2. Placa având forma de triunghi dreptunghic OAB, se roteşte în planul său în jurul articulaţiei O cu viteza unghiulară constantă ω. Să se reprezinte distribuţia vitezelor pe laturile plăcii, pentru poziţia din figura 2.13, a. Aplicaţie numerică : OA = 3 dm, AB = 4 dm, OB = 5 dm, ω = 0,2 rad/s. Rezolvare : Se ştie că distribuţia vitezelor pe o dreaptă care trece prin axa de rotaţie este liniară (proprietatea P4). Este cazul distribuţiilor pe laturile OA şi OB. 1) Viteza în punctul O (articulaţia fixă) este nulă şi deci sunt necesare mai întâi mărimile vitezelor vârfurilor A şi B :
A
B
v OAv OB
ωω
= ⋅= ⋅
2) Se reprezintă cele două viteze Av şi Bv , având direcţiile normale la razele OA şi respectiv, OB. Sensul lor corespunde mişcării impuse de viteza unghiulară ω , sensul rotaţiei fiind cel orar (fig. 2.13, a). 3) Ca modalitate practică de reprezentare a distribuţiei vitezelor punctelor de pe latura OA, se uneşte vârful vectorului Av cu articulaţia O. Se reprezintă vitezele câtorva puncte între O şi A, ducând normale la direcţia OA. 4) Se reprezintă distribuţia pe latura OB, în mod similar cu procedeul de la punctul 3). 5) Latura AB a triunghiului nu mai trece prin articulaţia O şi deci distribuţia vitezelor pe AB nu va mai fi liniară. Se aleg punctele M, N, P echidistante pe AB astfel încât AM = MN = NP = PB = AB/4. Din triunghiurile dreptunghice OAM, ..., OAP se calculează distanţele OM, ..., OP cu relaţii date
de teorema lui Pitagora : 2 2OM OA AM= + , ..., 2 2OP OA AP= + .
O
ω
A B
vB
• • vA
(a)
B M N P A • • • • •
ω
O
vA
vM vN vP vB (b)
Fig. 2.13.

Cinematica solidului rigid Mişcări particulare ale rigidului
69
Se calculează şi apoi se reprezintă vitezele punctelor : ; ; .M N Pv OM v ON v OPω ω ω= ⋅ = ⋅ = ⋅ 6) Ca verificare grafică, se remarcă coliniaritatea vârfurilor vitezelor Av ,
Mv , Nv , Pv şi Bv (fig. 2.13, b). 7) Aplicaţia numerică : Se transformă lungimile în unităţi fundamentale :
3 dm = 0,3 mOA = ; 4 dm = 0,4 mAB = ; 5 dm = 0,5 mOB = . Rezultă vitezele : 0,3 0,2 0,06 m/sAv OA ω= ⋅ = ⋅ = ; 0,5 0,2 0,10 m/sBv OB ω= ⋅ = ⋅ = . Se calculează vitezele punctelor M, N şi P :
2 2
2 2
2 2
0,1 10 0,2 0,063 m/s,
0,1 13 0,2 0,072 m/s,
0,1 18 0,2 0,085 m/s.
M
N
P
v OM OA AM
v ON OA AN
v OP OA AP
ω ω
ω ω
ω ω
= ⋅ = + ⋅ = ⋅ =
= ⋅ = + ⋅ = ⋅ =
= ⋅ = + ⋅ = ⋅ =
APLICAŢIA 2.3. Placa dreptunghiulară O1ABC se roteşte uniform cu viteza unghiulară ω în jurul laturii O1A aflată pe axa O1y1 (fig 2.14, a). Să se reprezinte distribuţia de viteze pe laturile plăcii.
Răspuns : Mai întâi se observă că punctele de pe latura O1A au viteza nulă deoarece se află pe axa de rotaţie (fig. 2.14, b). Punctul C descrie un cerc aflat în planul x1O1z1. Viteza Cv are direcţia normală pe raza O1C şi pe latura BC. Latura BC este paralelă cu axa de rotaţie, şi pe aceasta distribuţia este uniformă. De aici se stabileşte că vitezele punctelor B şi C sunt egale şi paralele ( B Cv v= ). Distribuţia de viteze pe latura O1C este liniară şi identică cu distribuţia de viteze pe latura paralelă AB.
O1
B C
A
vB vC
(b)
y1
z1
x1
ω B
C
A O1
(a) Fig. 2.14.

Cinematica A. Vasilescu
70
2.2.3. Mişcarea elicoidală
Definiţie :
Un solid rigid execută o mişcare elicoidală dacă două puncte aparţinând acestuia rămân pe o dreaptă fixă în spaţiu, în tot timpul mişcării. Această dreaptă poartă numele de axa mişcării elicoidale.
Fie un solid rigid ale cărui puncte O şi O' rămân pe o dreaptă fixă (∆) în tot timpul mişcării acestuia (fig. 2.15). Se alege un sistem de referinţă fix O1x1y1z1 având axa O1z1 în coincidenţă cu axa (∆). Sistemul de referinţă mobil se alege cu originea în punctul O şi cu axa Oz suprapusă peste axa O1z1. Puncul O descrie axa Oz , fiind caracterizat de vectorul de poziţie 1O Or z k= . Mişcarea rigidului este definită dacă se cunoaşte mişcarea originii mobile O pe axa (∆) şi rotaţia sistemului mobil faţă de cel fix, adică sunt cunoscuţi cei doi parametri scalari : ( )O Oz z t= şi ( )tθ θ= (2.49) Spunem că solidul rigid în mişcarea elicoidală are două grade de libertate.
Fig. 2.15.
A
M vO
O'
z ≡ z1 ω
y θ
x θ
O
x1
y1 O1
r1
r
vM
vO
ω × r
rO

Cinematica solidului rigid Mişcări particulare ale rigidului
71
Din punctul de vedere al clasificărilor mişcărilor particulare ale solidului rigid, mişcarea elicoidală poate fi considerată ca fiind o mişcare compusă din cele două mişcări elementare : o translaţie şi o rotaţie. Astfel există o translaţie în lungul axei O1z1 definită de mărimile vectoriale : 1O Or z k= , 1O O Ov z k v k= = , 1O O Oa z k a k= = , (2.50) şi o rotaţie în jurul aceleiaşi axe a mişcării elicoidale, definită de vectorii viteză unghiulară şi acceleraţie unghiulară : k kω θ ω= = , k kε θ ε= = . (2.51) Relaţiile anterioare subliniază faptul că vectorii ω şi ε sunt coliniari cu aceiaşi direcţie fixă ( ω ε ). Se observă că poziţia punctului M faţă de axa mişcării
elicoidale O1z1 rămâne mereu la aceiaşi distanţă 2 2d x y= + . Toate aceste elemente sunt utile pentru stabilirea distribuţiei de viteze şi de acceleraţii. În mişcarea elicoidală, distribuţia de viteze se stabileşte din dezvoltarea expresiei vectoriale a vitezei punctului M, dată de formula lui Euler (2.17) :
0 0M O O O
i j kv v r v k yi xj v k
x y zω ω ω ω= + × = + = − + + (2.52)
2 2 20v d vω= + , (2.53)
iar distribuţia acceleraţiilor este dedusă din cea de-a doua formulă a lui Euler (2.32) pentru acceleraţii :
( ) 0 0 0 00
M O O
i j k i j ka a r r a k
x y z y xε ω ω ε ω
ω ω= + × + × × = + + =
−
2 2( ) ( ) Oy x i x y j a kε ω ε ω= − + + − + (2.54) 2 2 4 2 2 4 2 2 2
0 0( )( ) ( )Ma x y a d aω ε ω ε= + + + = + + (2.55) Pentru reprezentarea distribuţiei de viteze şi de acceleraţii, la fel ca la mişcarea de rotaţie, se consideră punctul M(xM,0,0) situat pe axa Ox. Relaţiile (2.52) şi (2.53) devin : M Ov xj v kω= + , (2.56)
2 2 20v x vω= + . (2.57)
Aceste relaţii pun din nou în evidenţă faptul că distribuţia de viteze se poate obţine din suprapunerea distribuţiilor de viteze dintr-o mişcare de rotaţie în jurul

Cinematica A. Vasilescu
72
axei Oz şi respectiv, dintr-o mişcare de translaţie în lungul axei O1z1≡Oz (fig. 2.16, a). Rezultă următoarele proprietăţi ale distribuţiilor de viteze şi acceleraţii în mişcarea elicoidală : P1. În mişcarea elicoidală nu există în general puncte de viteză nulă sau de
acceleraţie nulă. Punctele solidului de pe axa mişcării elicoidale ( 0x y= = ) au viteză minimă Ov k şi acceleraţie minimă Oa k .
P2. Punctele situate pe o dreaptă (∆) a solidului rigid, paralelă cu axa mişcării elicoidale au aceiaşi viteză şi aceiaşi acceleraţie.
P3. Pe o dreaptă perpendiculară pe axa mişcării elicoidale, vectorii viteză variază liniar.
P4. Pe o dreaptă perpendiculară pe axa mişcării elicoidale şi pe care o intersectează, vârfurile vectorilor acceleraţie se găsesc pe o dreaptă (fig. 2.16, b). Această proprietate este o consecinţă a liniarităţii expresiilor proiecţiilor aceeleraţiei (2.54) în coordonatele x şi y.
Un caz particular de mişcare elicoidală este mişcarea unui şurub într-o piuliţă fixă. În acest caz, existenţa filetului face ca pentru o rotaţie 2π a şurubului, acesta să înainteze în lungul axei cu pasul p, adică Oz Cθ= unde constanta / 2C p π= . Rezultă că mişcarea de şurub a unui solid rigid are un grad de libertate. Dacă 0C > şurubul este drept, iar dacă 0C < şurubul este stâng. Viteza şi acceleraţia originii O a sistemului solidar, se calculează O Ov z C Cθ ω= = = , O Oa z C Cθ ε= = = . (2.58)
Fig. 2.16.
M"
M'
aM"
aM'
(∆) ε
aO
O
z
x (b)
ax
aM
M
ω y
ay
az
Axa
miş
cării
el
icoi
dale
(∆)
vO
O
M
z
(a)
vz
ω vM
vz
vz
x
y vM'
vM"
M"
M'

Cinematica solidului rigid Mişcări particulare ale rigidului
73
2.2.4. Mişcarea plan-paralelă (plană)
Definiţie :
Un solid rigid execută o mişcare plan-paralelă (plană) dacă trei puncte necoliniare ale sale sunt conţinute în tot timpul mişcării într-un plan fix din spaţiu.
Se consideră sistemul de referinţă solidar cu solidul rigid xOyz astfel încât planul xOy să rămână conţinut în planul fix x1O1y1 (fig. 2.17). Numărul maxim de grade de libertate pe care le are un rigid în mişcare plan-paralelă este de trei, poziţia sa la un moment dat fiind definită prin trei parametri scalari : 0 0( ), ( ), = (t).x x t y y t θ θ= = (2.59) Mişcarea plan paralelă este o mişcare particulară compusă dintr-o translaţie în planul fix şi o rotaţie în jurul unei axe normale la planul fix. Translaţia este definită de mărimile vectoriale :
1 1O O Or x i y j= + , 1 1O Ox Oyv v i v j= + , 1 1O Ox Oya a i a j= + , (2.60) iar rotaţia este definită de vectorii viteză unghiulară şi acceleraţie unghiulară : k kω θ ω= = , k kε θ ε= = . (2.61) OBSERVAŢIE
Din punctul de vedere vectorial, mişcarea plan-paralelă este caracterizată la orice moment, de ortogonalitatea vectorilor fundamentali Ov şi ω ( Ov ω⊥ ) care implică şi ortogonalitatea vectorilor Oa ε⊥ .
ω =θ k
θ
z
y
O(xo,yo,0)
x
M
z1
O1
x1
Fig. 2. 17.
1 1,,
Iξ ηξ η
vO = vOx i + vOy j
θ
r rO
r1 y1 r'
Axa
inst
anta
nee
de ro
taţie

Cinematica A. Vasilescu
74
Distribuţia vitezelor punctelor unui rigid efectuând o mişcare plan-paralelă este dedusă din dezvoltarea expresiei vectoriale a vitezei punctului M :
0 0M O O Ox Oy
i j kv v r v i v j
x y zω ω= + × = + + (2.62)
de unde se obţin proiecţiile vitezei pe axele sistemului de axe mobil
0
x Ox
y Oy
z
v v yv v x
v
ωω
= − = + =
(2.63)
Din (2.63) rezultă proprietăţile distribuţiilor de viteze în mişcarea plan-paralelă a rigidului : P1. Vitezele sunt conţinute în plane paralele cu planul fix x1O1y1, deoarece
proiecţia vitezei pe axa Oz este identic nulă ( 0zv ≡ ). P2. În mişcarea plan-paralelă distribuţia de viteze poate fi considerată ca
fiind obţinută din compunerea în acelaşi plan (paralel cu planul xOy), a distribuţiei de viteze dintr-o mişcare de translaţie ( O Ox Oyv v i v j= + ) şi
a unei distribuţii de viteze dintr-o mişcare de rotaţie ( k rω × ). P3. La orice moment al mişcării există puncte ale căror viteze sunt nule. Din
condiţia de anulare a proiecţiilor vitezelor (2.63) şi notând coordonatele acestor puncte cu , ,ξ η ζ , avem :
Oy
Ox
v
v
ξω
ηω
= −
=
, (2.64)
iar ζ este arbitrar. Prin urmare, punctele solidului rigid care la un moment dat au viteza nulă se găsesc pe o dreaptă paralelă cu axa Oz. Această axă poartă numele de axă instantanee de rotaţie, iar punctul în care axa înţeapă planul xOy este denumit centrul instantaneu de rotaţie (I), având coordonatele ξ şi η din relaţia (2.64). În raport cu sistemul de referinţă fix, coordonatele centrului instantaneu de rotaţie 1ξ şi 1η sunt obţinute aplicând o translaţie
1 1O O Or x i y j= + , apoi o rotaţie de unghi θ a sistemului mobil de axe (fig. 2.18) :
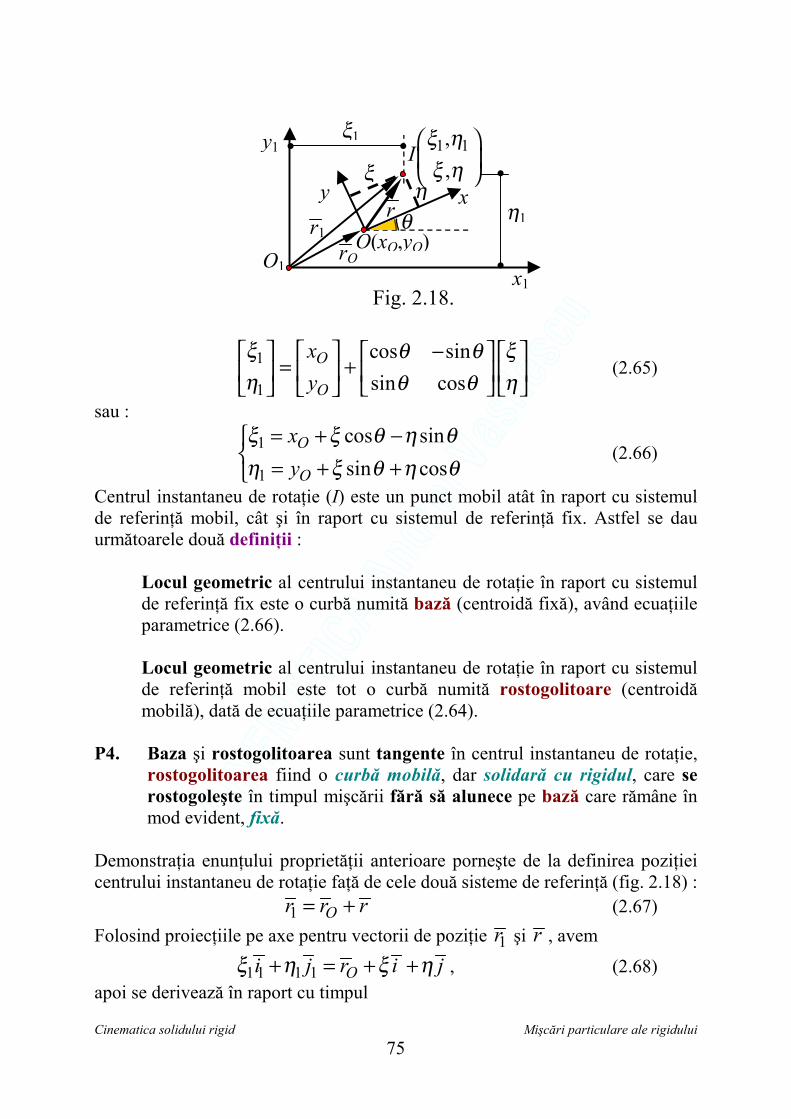
Cinematica solidului rigid Mişcări particulare ale rigidului
75
1
1
cos sinsin cos
O
O
xy
ξ θ θ ξη θ θ η
− = +
(2.65)
sau :
1
1
cos sinsin cos
O
O
xy
ξ ξ θ η θη ξ θ η θ= + −
= + + (2.66)
Centrul instantaneu de rotaţie (I) este un punct mobil atât în raport cu sistemul de referinţă mobil, cât şi în raport cu sistemul de referinţă fix. Astfel se dau următoarele două definiţii :
Locul geometric al centrului instantaneu de rotaţie în raport cu sistemul de referinţă fix este o curbă numită bază (centroidă fixă), având ecuaţiile parametrice (2.66). Locul geometric al centrului instantaneu de rotaţie în raport cu sistemul de referinţă mobil este tot o curbă numită rostogolitoare (centroidă mobilă), dată de ecuaţiile parametrice (2.64).
P4. Baza şi rostogolitoarea sunt tangente în centrul instantaneu de rotaţie,
rostogolitoarea fiind o curbă mobilă, dar solidară cu rigidul, care se rostogoleşte în timpul mişcării fără să alunece pe bază care rămâne în mod evident, fixă.
Demonstraţia enunţului proprietăţii anterioare porneşte de la definirea poziţiei centrului instantaneu de rotaţie faţă de cele două sisteme de referinţă (fig. 2.18) : 1 Or r r= + (2.67) Folosind proiecţiile pe axe pentru vectorii de poziţie 1r şi r , avem
1 1 1 1 Oi j r i jξ η ξ η+ = + + , (2.68) apoi se derivează în raport cu timpul
θ
Fig. 2.18.
y ξ
r1
x r η1
rO O1x1
y1
O(xO,yO)
ξ1I 1 1,
,ξ ηξ η
η

Cinematica A. Vasilescu
76
1 1 1 1 Oi j r i j i jξ η ξ η ξ η+ = + + + + . (2.69) Se remarcă prezenţa în membrul din dreapta a derivatele versorilor mobili în raport cu timpul, derivate care sunt date de formulele lui Poisson (2.15). În membrul drept al egalităţii (2.69) se observă că acesta conţine viteza centrului instantaneu de rotaţie în raport cu sistemul de referinţă mobil, viteză care prin definiţie este nulă ( 0Iv = )
( ) 0
O O
O I
r i j v i jv i j vξ η ξω ηωω ξ η
+ + = + × + × == + × + = =
(2.70)
Egalitatea (2.69) se scrie 1 1 1 1i j i jξ η ξ η+ = + (2.71) În relaţia (2.71), membrul stâng reprezintă viteza cu care punctul I se deplasează pe bază, iar membrul drept reprezintă viteza cu care acelaşi punct se deplasează pe rostogolitoare. Două sunt implicaţiile care rezultă din egalitatea (2.71) : – cei doi vectori au aceiaşi direcţie, adică cele două curbe (baza şi rostogolitoarea) au tangentă comună în punctul I ; – modulii celor doi vectori sunt egali :
2 2 2 21 1ξ η ξ η+ = + (2.72)
Dacă se amplifică egalitatea (2.72) cu dt, atunci se obţine
2 2 2 21 1 1d d d d ds dsξ η ξ η+ = + ⇒ = , (2.73)
ceea ce înseamnă că arcele elementare parcurse pe cele două curbe în acelaşi interval de timp sunt egale, adică mişcarea relativă a rostogolitoarei pe bază este rostogolire fără alunecare. Se reaminteşte că axa instantanee de rotaţie este paralelă cu axa Oz tot timpul mişcării, intersectând planul fix în centrul instantaneu de rotaţie. Pe durata mişcării rigidului axa instantanee de rotaţie generează două suprafeţe cilindrice numite axoida fixă şi axoida mobilă. Axoidele au ca generatoare comună axa instantanee de rotaţie. Axoida mobilă se rostogoleşte fără să alunece în raport cu axoida fixă. Intersecţia axoidelor cu planul fix x1O1y1 o reprezintă cele două centroide (baza şi rostogolitoarea). P5. Distribuţia vitezelor este identică cu cea dintr-o mişcare de rotaţie, ca şi
când rigidul s-ar roti cu viteza unghiulară instantanee ω în jurul axei instantanee de rotaţie.
Într-adevăr, dacă se consideră vectorul 'IM r= (fig. 2.17), în triunghiul IOM, există relaţia 'r OI r= + , iar cum viteza centrului instantaneu de rotaţie este

Cinematica solidului rigid Mişcări particulare ale rigidului
77
nulă ( 0I Ov v OIω= + × = ), atunci viteza unui punct oarecare M se poate scrie : ( ') 'M O Ov v r v OI r rω ω ω= + × = + × + = × (2.74) Relaţia (2.74) arată că viteza punctului M este identică cu cea obţinută în mişcarea de rotaţie, ca şi cum rigidul s-ar roti în jurul axei instantanee de rotaţie. Ultima proprietate arată importanţa stabilirii poziţiei centrului instantaneu de rotaţie (CIR) la rezolvarea problemelor. Câteva cazuri sunt deosebit de utile la stabilirea poziţiei CIR : a) dacă se cunosc direcţiile vitezelor a două puncte din solidul rigid, atunci se ridică perpendiculare pe direcţiile acestora şi la intersecţia lor se va găsi CIR (fig. 2.19, a) ; b) Dacă cele două viteze sunt paralele şi punctele se găsesc pe aceiaşi perpendiculară, atunci se va utiliza proprietatea vitezelor în mişcarea de rotaţie de a varia liniar pe o dreaptă care intersectează axa de rotaţie (fig. 2.19, b, c).
Studiul distribuţiilor de acceleraţii se face pornind de la formula lui Euler (2.32) )( rraa O ××+×+= ωωε în care se cunosc expresiile vectorilor : O Ox Oya a i a j= + , kω ω= , kε ε= , r y i x jω ω ω× = − + şi deci
0 0 0 00
Ox Oy
i j k i j ka a i a j
x y z y xε ω
ω ω= + + +
−
Dezvoltând determinanţii, se obţine 2 2( ) ( )Ox Oya a y x i a x y jε ω ε ω= − − + + − (2.75)
ω I(CIR)
A vA
ω I(CIR)
vB B
A
vA vB ω I(CIR)
A vB
vA
B
Fig. 2.19.
(c) (a) (b)

Cinematica A. Vasilescu
78
Proiecţiile acceleraţiei unui punct oarecare din solidul rigid, pe axele sistemului mobil sunt
2
2
0
x Ox
y Oy
z
a a y x
a a x y
a
ε ω
ε ω
= − − = + − =
(2.76)
Din expresiile (2.76), se deduc proprietăţile distribuţiilor de acceleraţii în mişcarea plan paralelă a solidului rigid. Pa1. Acceleraţiile punctelor sunt vectori care au direcţiile conţinute în plane
paralele cu planul fix x1O1y1 ( 0za = ). Pa2. Există puncte a căror acceleraţie este nulă la un anumit moment al
mişcării. Aceste puncte se află pe o dreaptă paralelă cu axa Oz ; intersecţia acestei drepte cu planul xOy este un punct J, numit polul acceleraţiilor.
Fie u şi v coordonatele polului J. Aceste coordonate se obţin din condiţia ca simultan proiecţiile acceleraţiei pe axe (2.76) să fie nule, adică rezolvând sistemul de ecuaţii :
2
2Ox
Oy
u v a
u v a
ω ε
ε ω
+ =− + =
(2.77)
care conduce la soluţiile
2 2
4 2 4 2, Ox Oy Ox Oya a a au v
ω ε ε ω
ω ε ω ε
− += =
+ + (2.78)
Pa3. Distribuţia de acceleraţii în mişcarea plan paralelă este identică cu cea
din mişcarea de rotaţie, ca şi cum solidul s-ar roti în jurul unei axe normale pe planul fix şi care trece prin polul acceleraţiilor.
Într-adevăr, se poate considera un triedru Jx'y'z' cu originea în polul J al acceleraţiilor şi cu axele paralele cu cele ale triedrului mobil Oxyz. Între coordonatele unui punct oarecare exprimate în cele două triedre, există relaţiile : 'x x u= + ; 'y y v= + ; 'z z= . (2.79) Înlocuind relaţiile (2.79) în expresiile (2.76), proiecţiile acceleraţiei devin :

Cinematica solidului rigid Mişcări particulare ale rigidului
79
2 2 2
2 2 2
( ) ' ' ' '
( ) ' ' ' '
0
x Ox
y Oy
z
a a y x y x y x
a a x y x y x y
a
ε ω ε ω ε ω
ε ω ε ω ε ω
= − − − − = − − = + − + − = − =
(2.80)
pentru că expresiile din paranteze 2Oxa y xε ω− − şi 2
Oya x yε ω+ − sunt nule în conformitate cu relaţiile (2.70). Relaţiile obţinute (2.80) sunt identice cu cele obţinute în cazul mişcării de rotaţie.
OBSERVAŢIA 1. Se atrage atenţia că solidul rigid nu se roteşte în jurul axei care trece prin polul acceleraţiilor, deoarece această axă este în continuă mişcare. Coordonatele u şi v sunt în general funcţii de timp, aşa cum rezultă din ecuaţiile (2.78).
OBSERVAŢIA 2. Centrul instantaneu de rotaţie şi polul acceleraţiilor sunt puncte diferite, care nu coincid decât în cazul mişcării de rotaţie.
OBSERVAŢIA 3. Centrul instantaneu de rotaţie I, pentru care prin definiţie viteza este egală cu zero ( 0Iv = ), are acceleraţia diferită de zero ( 0Ia ≠ ), iar polul acceleraţiilor J, pentru care prin definiţie acceleraţia este egală cu zero ( 0Ja = ), are viteza diferită de zero ( 0Jv ≠ ).
OBSERVAŢIA 4. Proprietatea Pa3, (distribuţia de acceleraţii este identică cu cea din mişcarea de rotaţie) permite determinarea poziţiei polului acceleraţiilor, pe altă cale decât pe cea analitică, oferită de relaţiile (2.78). Se presupun cunoscute acceleraţia Aa a unui punct A al solidului (fig. 2.20), viteza unghiulară ω şi acceleraţia unghiulară ε. Din punctul A se duce o semidreaptă care face cu direcţia acceleraţiei unghiul ϕ, măsurat în sensul dat de acceleraţia unghiulară ε. Unghiul ϕ se determină din relaţia 2tg /ϕ ε ω= . Polul
acceleraţiilor se află pe această semidreaptă la distanţa 4 2
AaAJ
ω ε=
+.
Cunoscând poziţia polului J, se poate determina acceleraţia oricărui alt punct. În figura 2.20 este reprezentată acceleraţia punctului B. Aceasta face unghiul ϕ cu
direcţia BP şi are mărimea egală cu 4 2Ba BP ω ε= + .
Fig. 2.20.
J
A ϕ
aB
aA ε
ϕ B

Cinematica A. Vasilescu
80
APLICAŢIA 2.4. Să se studieze mişcarea plană a unui disc de rază R, ştiind că centrul discului de deplasează cu viteza Ov constantă, iar discul se rostogoleşte în acelaşi timp pe o dreaptă orizontală (∆), cu viteza unghiulară
0ω (fig. 2.21).
Răspuns : Se consideră sistemul de axe fix x1O1y1 având axa orizontală O1x1 în coincidenţă cu dreapta , iar sistemul de axe solidar discului cu originea în centrul O al discului şi orientarea dată de unghiul θ(t) cu direcţiile fixe (fig. 2.21). Viteza originii O are proiecţiile : cosOx Ov v θ= ;
sinOy Ov v θ= .
Folosind relaţiile (2.64), în care 0k kω θ ω= − = − , se obţin coordonatele centrului instantaneu de rotaţie (ecuaţiile parametrice ale rostogolitoarei), în sistemul de referinţă solidar (mobil) :
0
sinOy Ov v θξω ω
= − = ; 0 0
cos cosOx O Ov v vθ θηω ω ω
= = = −−
.
Prin urmare :
0
(sin cos )OvOI i j i jξ η θ θω
= + = −
şi deci 2 2
0
OvOI ξ ηω
= + = ,
adică centrul instantaneu de rotaţie se află la o distanţă constantă (independentă de timp), distanţă considerată în raport cu centrul discului O. Se mai observă că punctul I se află pe o dreaptă normală la direcţia vitezei
(cos sin )O Ov v i jθ θ= + . Observaţia este verificabilă prin efectuarea
produsului scalar al celor doi vectori care este evident nul ( 0Ov OI = ). Referitor la poziţia centrului instantaneu de rotaţie, se face următoarea discuţie : a) Dacă 0Ov Rω= , se obţine OI R= , ceea ce înseamnă că centrul instantaneu
se găseşte în punctul de contact I dintre disc şi axa orizontală O1x1 şi se spune că discul se rostogoleşte fără să alunece ( 0Iv = ).
θ O
y
x1
x
vO
y1
O1
η 1=R
O
ω
ξ1 I
Fig. 2.21.
Rostogolitoarea
Baza
(∆)

Cinematica solidului rigid Mişcări particulare ale rigidului
81
b) Dacă O Ov Rω> , rezultă că OI R> (fig. 2.22 a). Discul are în punctul de
contact I o viteză pozitivă, în acelaşi sens cu Ov ( 2 0 0Iv I I ω= ⋅ > ). Concluzia este că discul alunecă în sensul deplasării centrului său. În dinamică se va discuta despre cazul "roţii trase", care se deplasează pe un suport alunecos.
c) Dacă O Ov Rω< , atunci OI R< (fig. 2.22 b). Discul are în punctul de
contact I o viteză negativă, în sens opus vitezei Ov ( 3 0 0Iv I I ω= ⋅ < ). Concluzia este că discul alunecă în sens opus deplasării centrului său, în dinamică se va discuta despre cazul "roţii motoare", care se deplasează pe un suport alunecos.
Revenind la poziţia centrului instantaneu, se tece la eliminarea parametrului timp (conţinut de unghiul ( )tθ θ= ) din ecuaţiile parametrice ale
rostogolitoarei : 0sin ( )O
tvωθ ξ= ; 0cos ( )
Ot
vωθ η= − , şi utilizând identitatea
trigonometrică 2 2sin cos 1θ θ+ = , se obţine ecuaţia rostogolitoarei 2
2 2
0
Ovξ ηω
+ =
. Rostogolitoarea este deci un cerc cu centrul în O şi cu raza
0
OvRω
= . Corespunzător primului caz dintre cele trei cazuri prezentate anterior,
atunci când 0Ov Rω= , rostogolitoarea este chiar periferia discului (fig. 2.21).
Fig. 2.22
(b)
Baza θ
y
x1
x
vO
y1
O1
η 1 O
ω0
I vI
I3
Rostogolitoarea
O1
Rostogolitoarea
θ O
y
x1
x
vO
y1
η 1
O
ω0
I2
I vI
Baza
(a)

Cinematica A. Vasilescu
82
Ecuaţiile parametrice ale bazei sunt date de relaţiile (2.66) în care unghiul θ se înlocuieşte cu θ− , deoarece rotaţia sistemului de axe din problemă este în sens opus celui considerat pozitiv (antiorar), celui din figura 2.18 :
1 0 10
cos sin ; sin cos OO O
vx x y Rξ ξ θ η θ η ξ θ η θω
= + + = = − + = −
Din ultima relaţie 1 .constη = şi se deduce că baza este o dreaptă paralelă cu axa
O1x1 (fig. 2.22), situată la distanţa 0
Ovω
de centrul discului. Dacă ne aflăm în
primul caz, al rostogoliri fără alunecare, atunci baza coincide cu axa O1x1 (fig. 2.21). Se reprezintă distribuţiile de viteze pe diametrul vertical AI al discului, pentru cele trei cazuri analizate (fig. 2.23). Aceste distribuţii sunt liniare, deoarece centrul instantaneu se află pe acest diametru. Practic, se uneşte centrul instantaneu de rotaţie (punct cu viteza nulă), cu extemitatea vectorului Ov . Distribuţia de acceleraţii se stabileşte după ce mai întâi se află poziţia polului acceleraţiilor J. Se observă că centrul discului efectuează o mişcare rectilinie uniformă, ceea ce înseamnă că punctul O are acceleraţia nulă în orice clipă. Viteza unghiulară este constantă şi atunci acceleraţia unghiulară este nulă. Rezultă că acceleraţiile punctelor aflate pe periferia discului sunt egale şi orientate către centrul O, având numai componenta normală (fig. 2.24) :
20A B Ia a a Rω= = = .
Discul având mişcare de rostogolire fără alunecare, a fost întâlnit la studiul cicloidei (paragraful 1.4.4), regăsind concluziile privind proprietăţile vitezei şi acceleraţiei unui punct aflat pe periferia discului.
Fig. 2.23.
x1
vO
y1
O1
O ω0
I
A vA
O1
A
x1
vO O
ω0 I2
I vI
vA y1
vI = 0 x1
vO
y1
O1
O ω0
I vI
I3
vA A
y1 aA
A
O1
O ≡ J
I Fig. 2.24
aI
aB
xB

Cinematica solidului rigid Mişcări particulare ale rigidului
83
APLICAŢIA 2.5. Să se arate că într-o mişcare plană, locul geometric al punctelor în care viteza şi acceleraţia sunt vectori coliniari este un cerc (denumit cercul inflexiunilor), iar locul geometric al punctelor în care aceşti doi vectori sunt ortogonali este de asemenea un cerc (denumit cercul de rebrusment). Se cunosc ω , ε , precum şi poziţiile centrului instantaneu de rotaţie I şi a polului acceleraţiilor J. Cele două cercuri sunt cunoscute ca fiind cercurile lui Bresse. Răspuns : Se alege sistemului de axe care are ca origine punctul I, astfel
încât unghiul format de dreapta IJ cu axa Oy să fie 2arctg εϕω
= (fig. 2.25, a).
Se duce dreapta perpendiculară pe IJ care întâlneşte axele Ox şi respectiv Oy în punctele A şi respectiv B. Cercul de diametru IB este cercul inflexiunilor, adică locul geometric al punctelor pentru care viteza şi acceleraţia sunt coliniare. Într-adevăr, dacă se consideră un punct M pe cercul de diametru IB şi se uneşte acest punct cu I şi J, atunci viteza Mv a punctului M trebuind să fie normală pe IM, suportul ei va fi MB. Acceleraţia Ma trebuind să facă unghiul ϕ cu JM, suportul ei va fi tot MB. Rezultă că vectorii Mv şi Ma sunt coliniari. Dacă se consideră acum un punct N pe cercul de diametru IA şi se uneşte acest punct cu I şi J, atunci viteza Nv a punctului N trebuind să fie normală pe IN are direcţia NA, iar acceleraţia Na trebuind să facă unghiul ϕ cu JN,
suportul ei va fi IN (fig. 2.25, b). Cum 90ANI = ° rezultă că vectorii Nv şi Na sunt ortogonali. Cercul de diametru IA este deci locul geometric căutat, cercul având denumirea de cercul de rebrusment.
Fig. 2.25.
aM
y
M
J
x
AI
ϕ
B
vM
ϕ
(a)
ϕ
y
J
90º-ϕ x
(b)
I
ϕ N
B
aN
vN
A
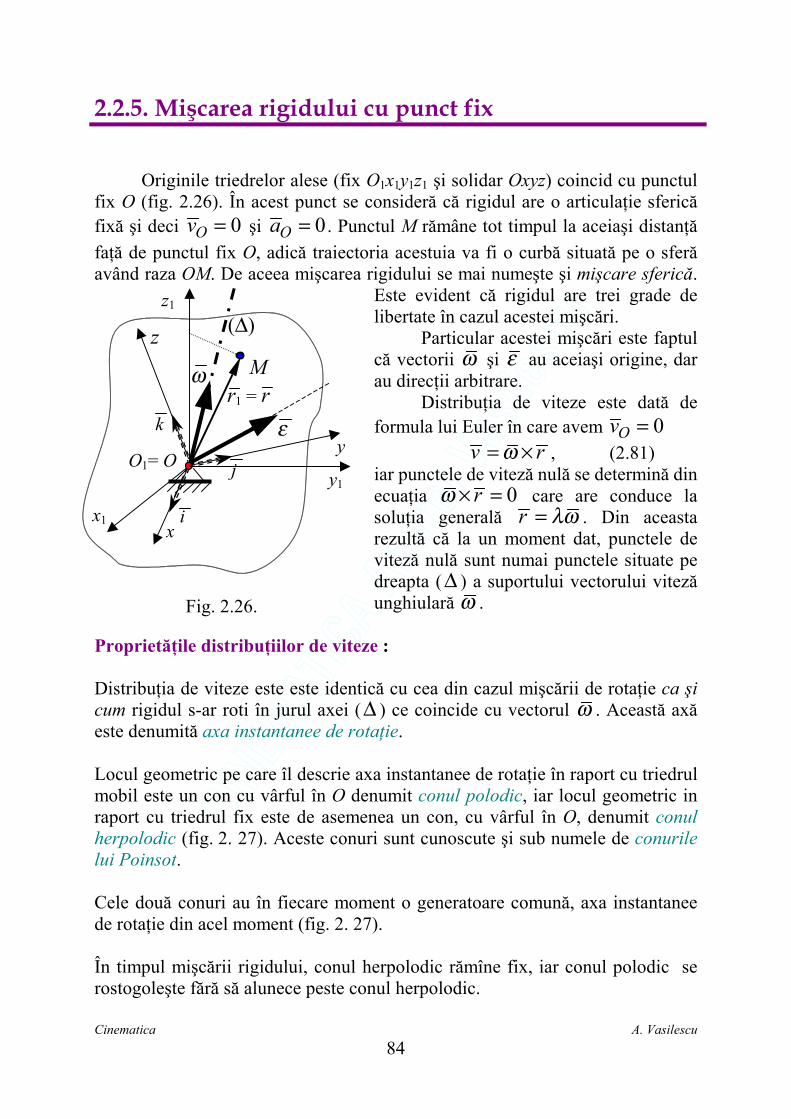
Cinematica A. Vasilescu
84
2.2.5. Mişcarea rigidului cu punct fix
Originile triedrelor alese (fix O1x1y1z1 şi solidar Oxyz) coincid cu punctul fix O (fig. 2.26). În acest punct se consideră că rigidul are o articulaţie sferică fixă şi deci 0Ov = şi 0Oa = . Punctul M rămâne tot timpul la aceiaşi distanţă faţă de punctul fix O, adică traiectoria acestuia va fi o curbă situată pe o sferă având raza OM. De aceea mişcarea rigidului se mai numeşte şi mişcare sferică.
Este evident că rigidul are trei grade de libertate în cazul acestei mişcări. Particular acestei mişcări este faptul că vectorii ω şi ε au aceiaşi origine, dar au direcţii arbitrare. Distribuţia de viteze este dată de formula lui Euler în care avem 0Ov = v rω= × , (2.81) iar punctele de viteză nulă se determină din ecuaţia 0rω × = care are conduce la soluţia generală r λω= . Din aceasta rezultă că la un moment dat, punctele de viteză nulă sunt numai punctele situate pe dreapta (∆ ) a suportului vectorului viteză unghiulară ω .
Proprietăţile distribuţiilor de viteze : Distribuţia de viteze este este identică cu cea din cazul mişcării de rotaţie ca şi cum rigidul s-ar roti în jurul axei (∆ ) ce coincide cu vectorul ω . Această axă este denumită axa instantanee de rotaţie. Locul geometric pe care îl descrie axa instantanee de rotaţie în raport cu triedrul mobil este un con cu vârful în O denumit conul polodic, iar locul geometric in raport cu triedrul fix este de asemenea un con, cu vârful în O, denumit conul herpolodic (fig. 2. 27). Aceste conuri sunt cunoscute şi sub numele de conurile lui Poinsot. Cele două conuri au în fiecare moment o generatoare comună, axa instantanee de rotaţie din acel moment (fig. 2. 27). În timpul mişcării rigidului, conul herpolodic rămîne fix, iar conul polodic se rostogoleşte fără să alunece peste conul herpolodic.
Fig. 2.26.
x x1
y1
z1
y
M
O1= O
k
i
j
r1 = r ω
ε
z (∆)

Cinematica solidului rigid Mişcări particulare ale rigidului
85
Pentu demonstraţie vom considera un punct P pe axa instantanee de rotaţie, având coordonatele , ,ξ η ζ faţă de triedrul mobil şi respectiv 1 1 1, ,ξ η ζ faţă de triedrul fix. În mod evident există relaţia de egalitate între vectorul de poziţie al punctului P exprimat în cele două triedre 1r r= , adică
1 1 1 1 1 1i j k i j kξ η ζ ξ η ζ+ + = + + . Relaţia obţinută se derivează în raport cu timpul :
1 1 1 1 1 1i j k i j k i j kξ η ζ ξ η ζ ξ η ζ+ + = + + + + + .
Aplicând formulele lui Poisson, i j k rξ η ζ ω+ + = × şi ţinând cont că punctul P se găseşte pe axa instantanee de rotaţie, adică acesta are viteza nulă
0Pv rω= × = , atunci rezultă :
1 1 1 1 1 1i j k i j kξ η ζ ξ η ζ+ + = + + . (2.82) Cei doi vectori din (2.82) reprezintă vitezele cu care se deplasează punctul P pe curbele descrise de el pe cele două conuri. Egalitatea vitezelor arată că cele două curbe sunt tangente, iar curba mobilă (aflată pe conul polodic) se rostogoleşte fără să alunece peste curba fixă (aflată pe conul herpolodic). Cum cele două conuri au axa (∆ ) ca generatoare comună, rezultă acestea sunt tangente, iar conul polodic se rostogoleşte fără să alunece peste cel herpolodic. Această proprietate furnizează o imagine sugestivă în ceea ce priveşte mişcarea rigidului cu punct fix, dar cunoaşterea celor două suprafeţe conice nu detremină complet mişcarea corpului, deoarece conul polodic se poate rostogoli pe conul herpolodic după legi diferite.
Conul polodic
Conul herpolodic
Fig. 2. 27.
ω
(∆ )
P
Conul polodic
Conul herpolodic
Fig. 2. 27.
ω
(∆ )
P

Cinematica A. Vasilescu
86
Distribuţia acceleraţiilor Pornind de la formula lui Euler pentru distribuţia de acceleraţii în care se introduce 0Oa = , rezultă că acceleraţia unui punct oarecare M este de forma : ( )a r rε ω ω= × + × × . (2.83) În continuare studiul distribuţiei de acceleraţii se face căutând puncte de acceleraţii nule. Se observă că cele două componente ale acceleraţiei din relaţia (2.83) au direcţii diferite. Astfel componenta rε × este perpendiculară pe direcţia vectorului ε , iar componenta 2( )r rω ω ω× × = − este în mod evident perpendiculară pe direcţia vectorului viteză unghiulară ω . Cum s-a arătat de la început că vectorii ω şi ε au aceiaşi origine, dar au direcţii arbitrare, rezultă că cele două componente ale acceleraţiei sunt în plane diferite, având o acceleraţie rezultantă nenulă. Singurul punct al rigidului care are acceleraţia nulă este punctul fix O ( 0Oa = ).
În consecinţă rigidul cu un punct fix are o distribuţie a acceleraţiilor specifică şi această distribuţie nu poate fi redusă la cea corespunzătoare altei mişcări particulare a rigidului.
Totuşi, ea se poate reduce la distribuţia caracteristică mişcării de rotaţie numai în cazul când 0ω ε× = (2.84) respectiv când unul dintre vectorii ω sau ε este nul, sau în cazul când cei doi vectori sunt coliniari. Relaţia (2.84) se obţine prin exprimarea produselor vectoriale (2.83) funcţie de proiecţiile vectorilor în triedrul mobil :
x y z x y z
y z z x x y
i j k i j ka
x y z z y x z z x
ε ε ε ω ω ω
ω ω ω ω ω ω
= +
− − −
de unde se obţin proiecţiile acceleraţiei punctului oarecare M
2 2
2 2
2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x y z x y z x z y
y z x y z x y x z
z x y z x y z y x
a x y z
a y z x
a z x y
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
= − + + − + + = − + + − + +
= − + + − + +
. (2.85)
Pentru a obţine soluţii diferite de cea banală ( 0x y z= = = corespunzătoare punctului fix) este necesar ca determinantul sistemului (2.85) să se anuleze :

Cinematica solidului rigid Mişcări particulare ale rigidului
87
2 2
2 2 2
2 2
( )
( ) ( ) 0
( )
y z x y z x z y
y x z z x y z x
z x y z y x x y
ω ω ω ω ε ω ω ε
ω ω ε ω ω ω ω ε ω ε
ω ω ε ω ω ε ω ω
− + − +
∆ = + − + − = − × =
− + − +
, (2.86)
Prin urmare, se obţine condiţia (2.84) 0ω ε× = , ceea ce era de demonstrat. Aplicaţia 2.6. Un con circular drept se rostogoleşte fără să alunece pe un plan orizontal (fig. 2.28) în jurul generatoarei O1A cu viteza unghiulară constantă ω . Să se calculeze mărimile vitezelor punctelor O (centrul bazei), B (diametral opus punctului de contact A) şi C, D, extremităţile diametrului orizontal, paralel cu planul fix. Se cunoaşte unghiul la vârf al conului 2 60α = ° şi raza bazei R.
Răspuns : În mişcarea sa de rostogolire fără alunecare, vârful conului O1 rămâne fix, iar vitezele punctelor de pe generatoarea O1A sunt nule. Această generatoare este axa instantanee de rotaţie. Viteza punctului O este
Ov PO ω= , unde PO este raza instantanee de rotaţie a punctului O. În triunghiul dreptunghic O1OA, înălţimea 3 / 2PO R= , iar
3 / 2Ov Rω= . Raza instantanee a punctului B este 2QB PO= şi
2B Ov v= (fig. 2.28). Se observă distribuţia liniară de viteze pe diametrul AB. Razele instantanee ale
punctelor C şi D sunt 2 2 7 / 2PC PD PO OC R= = + = . Vitezele punctelor C şi D se găsesc în planul vertical PCD, fiind perpendiculare pe razele instantanee PC şi PD, iar vârfurile vitezelor , ,C O Dv v v sunt coliniare
(fig. 2.29). Se calculează la final valorile acestor viteze : 7 / 2C Dv v Rω= = .
Fig. 2.29.
ω
vO R
O C
D
vD
vC
P
3 / 2R
B
O1 A
O
Q
C
D
P
2α
vB
ω
Fig. 2.28.
vO

Cinematica A. Vasilescu
88
2.3. MIŞCAREA GENERALĂ A RIGIDULUI 2.3.1. Generalităţi
Se revine asupra unor aspecte privind mişcarea generală a rigidului, după ce au fost studiate principalele mişcări particulare ale acestuia. Rigidului aflat într-o mişcare generală nu i se impune nici o restricţie de natură geometrică şi prin urmare acesta are şase grade de libertate (numărul maxim de grade de libertate, corespunzător corpului liber). Mişcările particulare ale rigidului au fost caracterizate prin introducerea unor restricţii geometrice care au condus la reducerea numărului gradelor de libertate. Se reaminteşte că în
cazul mişcării de translaţie a rigidului numărul maxim de grade de libertate este de trei, în cazul mişcării de rotaţie este egal cu unu, în cazul mişcării plan-paralele este maxim trei, în cazul mişcării elicoidale este maxim doi, iar în cazul mişcării rigidului cu punct fix numărul gradelor de libertate este de maxim trei. Aceste restricţii se reflectă şi asupra perechilor de vectori fundamentali Ov şi ω , respectiv Oa şi ε .
În mişcarea generală a rigidului, nu se impun restricţii asupra acestor vectori : direcţiile lor sunt oarecare (fig. 2.30), iar mărimile lor sunt funcţii oarecare de timp. Aceşti vectori fundamentali au expresiile generale :
O Ox Oy Oz
x y z
v v i v j v k
i j kω ω ω ω
= + +
= + + (2.87)
O x y z
x y z
a a i a j a k
i j kε ε ε ε
= + +
= + + (2.88)
Fig. 2.30.
x
x1
y1
z1
y O
O1 aO
ω
ε
z (∆)
vO

Cinematica solidului rigid Mişcarea generală a rigidului
89
2.3.2. Studiul vitezelor
Distribuţia de viteze în mişcarea generală a rigidului este dată de formula lui Euler M Ov v rω= + × care se proiectează pe axele triedrului mobil :
x Ox y z
y Oy z x
z Oz x y
v v z y
v v x z
v v y x
ω ω
ω ω
ω ω
= + − = + − = + −
(2.89)
În continuare se va arăta că distribuţia instantanee de viteze în mişcarea generală a rigidului este reductibilă la aceea a unei mişcări elicoidale. Pentru aceasta este suficient să se arate că există puncte pentru care v şi ω sunt vectori paraleli, proprietate analoagă cu cea din mişcarea elicoidală, adică v λω= , adică proiecţiile vectorului v sunt proporţionale cu proiecţiile vectorului ω :
yx z
x y z
vv vω ω ω
= = (2.90)
sau ţinând seama de relaţiile (2.89) rezultă
Ox y z Oy z x Oz x y
y z
v z y v x z v y xω ω ω ω ω ωω ω ω
+ − + − + −= = (2.91)
Relaţia obţinută furnizează două ecuaţii de gradul întâi în x, y şi z, adică ecuaţiile a două plane care definesc la rândul lor o dreaptă, numită axa instantanee a mişcării elicoidale. Această axă este tot timpul paralelă cu suportul vectorului ω şi reprezintă locul geometric al punctelor în care vectorii v şi ω sunt coliniari la un moment dat. Locul geometric al axei instantanee a mişcării elicoidale faţa de sistemul de referinţă fix este o suprafaţă riglată şi se numeşte axoidă fixă. Locul geometric al axei instantanee a mişcării elicoidale faţa de sistemul de referinţă mobil (ataşat rigidului în mişcare) este de asemenea o suprafaţă riglată şi se numeşte axoidă mobilă. În paragrafele anterioare s-a arătat că distribuţia de viteze în mişcarea generală a rigidului, are doi invarianţi : vectorul ω este un invariant vectorial în raport cu triedrul mobil, iar proiecţia vitezei v pe direcţia vectorului ω este
constantă (invariantul scalar) şi este dată de relaţia (2.29) : ω
ωω
•= vv .

Cinematica A. Vasilescu
90
Se poate considera că viteza unui punct oarecare M aparţinând rigidului în mişcare generală are două componente: vω paralelă cu ω (invariabilă şi nenulă), iar a doua nv normală pe direcţia vectorului ω şi variabilă cu punctul (fig. 2.31). Punctele Q de pe axa instantanee a mişcării elicoidale au viteza minimă egală cu vω , componenta nv fiind nulă. Acestă observaţie conduce la următoarea propoziţie referitoare la poziţia relativă a axoidelor fixă şi respectiv mobilă :
Cele două axoide sunt tangente după axa instantanee a mişcării elicoidale, în timp ce axoida mobilă se rostogoleşte peste axoida fixă în jurul axei instantanee şi simultan alunecă în lungul ei cu viteza vω .
În continuare se poate constata o analogie între ecuaţia axei instantanee a mişcării elicoidale şi ecuaţia axei centrale din statică, precum şi între cei doi invarianţi din cinematica şi statica solidului rigid. Această analogie numită analogia statico-cinematică este formală şi are la bază interpretarea formulelor fundamentale de la reducerea sistemelor de forţe din statica solidului rigid P OM M R OP= + × (2.92) şi de la stabilirea distribuţiilor de viteze în mişcarea generală a rigidului P Ov v OPω= + × . (2.93) Cele două formule vectoriale sunt analoage. Ele conduc la stabilirea unei corespondenţe biunivoce între momentele forţelor ( ,P OM M ) şi a vitezele punctelor ( ,P Ov v ) pe de o parte şi apoi, între rezultanta sistemului de forţe ( R ) şi a vectorului viteză unghiulară (ω ), pe de altă parte :
P O
P O
M M R
v v ω
(2.93)
Analogia statico-cinematică constă în analogia câmpului de momente şi a celui de viteze, pe un solid rigid.
Cele două câmpuri şi proprietăţile lor au fost studiate independent, deci cele două modele (static şi cinematic) sunt independente, dar considerând ca bază modelul static care a fost studiat anterior, se poate înţelege mai uşor modelul cinematic (ditribuţia de viteze pe solidul rigid).
Fig. 2.31.
Q ω
vω
vω M vn
vM

Cinematica solidului rigid Mişcarea generală a rigidului
91
2.3.3. Studiul acceleraţiilor
Distribuţia de acceleraţii în mişcarea generală a rigidului este furnizată de relaţia (2.32) )( rraa O ××+×+= ωωε . Proiecţiile pe axe ale acceleraţiei sunt :
2 2
2 2
2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x Ox y z x y z x z y
y Oy z x y z x y x z
z Oz x y z x y z y x
a a x y z
a a y z x
a a z x y
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
= − + + − + + = − + + − + +
= − + + − + +
(2.94)
Se pune problema stabilirii punctelor în care acceleraţia este nulă : 0x y za a a= = = . Se obţine astfel din (2.94) un sistem de ecuaţii liniare
neomogene în coordonatele , ,x y z . Determinantul acestui sistem este identic cu determinantul (2.86) stabilit la mişcarea rigidului cu punct fix 2( )ω ε∆ = − × . Cum în mişcarea generală vectorii ω şi ε sunt nenuli şi au direcţii diferite, se obţine că 0∆ ≠ şi rezultă ca soluţie coordonatele unui singurul punct de acceleraţie nulă numit polul acceleraţiilor. Polul acceleraţiilor se mişcă atât faţă de triedrul fix , cât şi faţă de cel mobil.
Distribuţia instantanee a acceleraţiilor în mişcarea generală a rigidului este deci identică cu aceea a uni rigid cu punct fix, ca şi cum rigidul ar avea ca punct fix polul acceleraţiilor.
Dacă în particular se obţine 0∆ = , atunci ne putem plasa în una dintre situaţiile următoare: 0ω = şi 0ε = (mişcare de translaţie) sau ω ε (mişcare de rotaţie sau elicoidală sau plan-paralelă). În aceaste situaţii există următoarele posibilităţi pentru sistemul de ecuaţii (2.94) : - Sistem incompatibil când nu există nici un punct de acceleraţie nulă (în cazul
mişcării de translaţie oarecare, a celei elicoidale). - Sistem nedeterminat când există o infinitate de puncte de acceleraţie nulă
(translaţie rectilinie şi uniformă) sau o infinitate de puncte de acceleraţie nulă situate pe o dreaptă (mişcare de rotaţie sau mişcare plan-paralelă).
În concluzie, distribuţia de acceleraţii este specifică fiecărei mişcări particulare a rigidului. Aceste distribuţii de acceleraţii pot fi reduse la distribuţii instantanee de acceleraţii specifice mişcărilor de translaţie şi rotaţie pentru mişcarea plan-paralelă.

Cinematica A. Vasilescu
92
2.4 VERIFICAŢI-VĂ CUNOŞTINŢELE 2.4.1. Întrebări de autocontrol
(2.1. Elemente generale ale mişcării rigidului)
• Să se definească obiectul de studiu al cinematicii solidului rigid. • În studiul mişcării unui rigid se utilizează două sisteme de referinţă. Care
sunt acestea? • Ce se înţelege prin "distribuţie de viteze" şi "distribuţie de acceleraţii" pe un
solid rigid? • Să se arate care este diferenţa şi care dintre dintre următoarele două noţiuni
este mai cuprinzătoare : "distribuţie de viteze" şi respectiv, "câmp de viteze". • Să se scrie formula lui Euler pentru distribuţia de viteze şi să se arate care
este semnificaţia mărimilor vectoriale care intervin. • Distribuţia de viteze în mişcarea generală a rigidului se poate defini ca fiind o
compunere dintr-o distribuţie de viteze într-o mişcare de translaţie şi dintr-o distribuţie de viteze într-o mişcare de rotaţie. Să se identifice termenii din formula lui Euler care arată aceasta.
• Să se enumere proprietăţile distribuţiei de viteze pentru rigidul aflat într-o mişcare generală.
• De ce se spune că viteza unghiulară ω este un invariant vectorial în raport cu triedrul mobil? Care dintre proprietăţile distribuţiei de viteze se poate folosi la argumentarea răspunsului?
• Teorema proiecţiilor vitezelor şi teorema coliniarităţii extremităţilor vectorilor viteză au o importanţă practică. Care este aceasta şi în ce context se utilizează cele două teoreme?
• În mişcarea generală a unui rigid nu există puncte de viteză nulă. Cum se demonstrează aceasta?
• Să se arate că dacă într-un punct M oarecare al rigidului avem Mv ω⊥ , atunci proprietatea de ortogonalitate rămâne valabilă în oricare alt punct al rigidului.
• Care este cel de-al doilea invariant al distribuţiei de viteze în mişcarea generală a rigidului?
• Să se arate ce caracteristică au vitezele punctelor unui solid rigid, aflate pe o dreaptă paralelă cu ω . Unde poate fi folosită această proprietate?
• Să se scrie formula lui Euler pentru distribuţia de acceleraţii şi să se prezinte semnificaţia termenilor care o compun.
• Ce reprezintă polul acceleraţiilor?

Cinematica solidului rigid Verificaţi-vă cunoştinţele
93
(2.2. Mişcări particulare ale rigidului)
• Ce se înţelege prin "mişcare particulară" şi "mişcare generală" a unui rigid? • Care sunt mişcările particulare "simple" sau "elementare" ale unui rigid? • Să se definească "mişcarea particulară compusă" a unui rigid şi să se dea
două exemple. • Să se explice de ce într-o mişcare particulară, numărul gradelor de libertate al
rigidului este mai mic decât în cazul unei mişcări generala a acestuia. • Să se definească mişcarea de translaţie a unui rigid şi să se explice de ce
rigidul în mişcarea de translaţie are cel mult trei grade de libertate. • Ce fel de mişcare de translaţie are un sertar? Să se stabilească numărul
gradelor de libertate în acest caz. • Ce tip de mişcare are cabina A a "roţii mari" din
figura 2.31? Dar pedala unei biciclete care se deplasează într-un plan vertical?
• Este corectă afirmaţia că "într-o mişcare de translaţie, viteza şi acceleraţia sunt doi vectori liberi"?
• Ce este "axa de rotaţie" şi de ce rigidul aflat în mişcare de rotaţie are gradul de mobilitate egal cu unitatea?
• În mişcarea de rotaţie, toţi versorii sistemului de referinţă solidar rigidului au derivatele în raport cu timpul nenule? Dacă răspunsul este negativ, să se argumenteze.
• Condiţia ca vectorii ω şi ε să fie coliniari nu este suficientă pentru a avea o mişcare de rotaţie. Ce altă condiţie mai trebuie adăugată?
• Să se prezinte proprietăţile distribuţiei de viteze în mişcarea de rotaţie a rigidului.
• În cazul mişcării de rotaţie a rigidului, să se enunţe proprietăţile distribuţiei de acceleraţii făcând o paralelă cu proprietăţile distribuţiei de viteze pe baza relaţiilor (2.46)...(2.48) şi a figurii 2.11.
• Să se arate în ce condiţii un rigid execută o mişcare elicoidală şi câte grade de mobilitate are acesta.
• Mişcarea elicoidală a rigidului poate fi considerată ca o mişcare compusă din două mişcări simple : o translaţie şi o rotaţie. Să se definească cele două mişcări simple în raport cu axa mişcării elicoidale.
• În mişcarea elicoidală există puncte de viteză nulă sau de acceleraţie nulă? • Să se explice cu ajutorul relaţiilor (2.52) şi (2.53) de ce punctele rigidului de
pe axa mişcării elicoidale au viteza minimă.
Fig. 2.31.
A

Cinematica A. Vasilescu
94
• Mişcarea unui şurub reprezintă un caz particular de mişcare elicoidală. Care este restricţia introdusă? Pasul şurubului este constant?
• Ce este un şurub "drept"? Dar unul "stâng"? Să se exemplifice. • Să se arate în ce condiţii un solid rigid efectuează o mişcare plan-paralelă şi
care este numărul maxim de grade de libertate al rigidului în acest caz. • În mişcarea plan-paralelă a rigidului, ortogonalitatea vectorilor fundamentali
Ov şi ω are o anumită implicaţie asupra direcţiei vectorilor Oa şi ε . Care este aceasta?
• Să se enumere cele cinci proprietăţi ale distribuţiei de viteze în mişcarea plan-paralelă a rigidului.
• Să se definească centrul instantaneu de rotaţie al unui rigid care are o mişcare plană şi să se arate importanţa acestui centru pentru stabilirea distribuţiei de viteze la un moment dat.
• Să se arate ce reprezintă locul geometric al centrului instantaneu de rotaţie în raport cu cele două sisteme de referinţă în raport cu care este studiată mişcarea rigidului.
• Într-o mişcare plană, vitezele a două puncte A şi B ale rigidului sunt paralele, egale şi au acelaşi sens (fig 2.32). Este corectă afirmaţia că în aceste condiţii distribuţia de viteze este specifică unei mişcări de translaţie instantanee?
• Mişcarea rigidului cu punct fix se mai numeşte şi "mişcare sferică". Pentru ce?
• Să se arate care este particularitatea pe care o au vectorii ω şi ε în mişcarea rigidului cu punct fix.
• Distribuţia de viteze în cazul mişcării rigidului cu punct fix este dată de relaţia v rω= × . Punctele de viteză nulă la un moment dat sunt cele aflate pe dreapta (∆) a suportului vectorului ω . Să se demonstreze aceasta şi să se arate că (∆) trece prin punctul fix al rigidului.
Fig. 2.32.
CIR
∞
vB
A vA
B
(a)
CIR
∞
vB
A vA
(b)

Cinematica solidului rigid Verificaţi-vă cunoştinţele
95
• Pentru ce axa (∆) a suportului vectorului ω poartă numele de "axă instantanee de rotaţie"?
• Locul geometric al axei instantanee de rotaţie îl reprezintă două conuri, unul fix, iar celălalt mobil. Cum se numesc conurile?
• Să se arate ce reprezintă generatoarea comună conurilor lui Poinsot şi să se precizeze dacă generatoarea este fixă sau mobilă în raport cu sistemul de referinţă fix.
• Să se arate pentru ce distribuţia de acceleraţii pe rigidul în mişcare cu punct fix nu poate fi redusă la cea corespunzătoare unei mişcări particulare a rigidului ( 0ω ≠ , 0ε ≠ , ω ε ).
(2.3. Mişcarea generală a rigidului)
• Solidul rigid în mişcare generală are restricţii de natură geometrică? Câte
grade de libertate are rigidul în acest caz? • Există restricţii între vectorii Ov , ω , Oa şi ε în mişcarea generală a
rigidului? • În mişcarea generală a rigidului, distribuţia instantanee de viteze este
reductibilă la distribuţia de vitezestudiată la una dintre mişcările particulare. Care este această mişcare particulară?
• Să se identifice cei doi invarianţi ai distribuţiilor de viteze în mişcarea generală a rigidului.
• Scrieţi cele două formule fundamentale din statica solidului rigid (de la reducerea sistemelor de forţe) şi respectiv, din cinematica solidului rigid şi stabiliţi analogia formală (analogia statico-cinematică) între mărimile vectoriale care intervin.
• Distribuţia de acceleraţii în mişcarea generală a rigidului permite stabilirea unui pol al acceleraţiilor (punct de acceleraţie nulă). Explicaţi existenţa acestuia având în vedere relaţia : 2( )ω ε∆ = − × şi sistemul ecuaţiilor liniare (2.94).
• Arătaţi care este importanţa determinării polului acceleraţiilor pentru stabilirea distribuţiei instantanee a acceleraţiilor în mişcarea generală a rigidului.

Cinematica A. Vasilescu
96
2.4.2. Recapitularea formulelor esenţiale
Formula fundamentală a cinematicii rigidului (formula lui Euler) pentru distribuţia de viteze : M Ov v rω= + × (2.17) Formula lui Euler pentru distribuţia de acceleraţii : ( )M Oa a r rε ω ω= + × + × × (2.32) Mişcările particulare simple (elementare) :
• Mişcarea de translaţie ( 0Ov ≠ şi 0ω = ); M Ov v= ; M Oa a= (2.36)
• Mişcarea de rotaţie ( 0Ov = şi 0ω ≠ , ω are direcţie fixă în spaţiu). Mv rω= × ; ( )Ma r rε ω ω= × + × × (2.45)
Mişcările particulare compuse :
• Mişcarea elicoidală ( 0Ov ≠ şi 0ω ≠ , ω ε şi Ov ,ω coliniari cu o axă fixă ∆);
• Mişcarea plan-paralelă (plană) ( 0Ov ≠ şi 0ω ≠ , Ov ω⊥ şi
Ov ∈unui plan fix );
Coordonatele centrului instantaneu de rotaţie I, ecuaţiile parametrice ale :
- Rostogolitoarei : ; Oy Oxv vξ ηω ω
= − = (2.64)
- Bazei : 1
1
cos sinsin cos
O
O
xy
ξ ξ θ η θη ξ θ η θ
= + − = + +
(2.66)
• Mişcarea rigidului cu punct fix ( 0Ov = , 0ω ≠ şi 0ε ≠ ; ω şi ε au direcţii arbitrare).
Mişcarea generală a rigidului :
Invariantul vectorial în raport cu triedrul mobil (solidar) : ω ; Invariantul scalar : proiecţia vitezei v pe direcţia vectorului ω :
ω
ωω
•= vv . (2.29)

Capitolul 3 Cinematica mişcării relative
111
CCaappiittoolluull 33 CCIINNEEMMAATTIICCAA MMIIŞŞCCĂĂRRIIII RREELLAATTIIVVEE
CUVINTE CHEIE
Mişcare relativă. Mişcare de transport. Mişcare absolută. Derivata absolută şi relativă a unui vector. Viteză relativă. Viteză de transport. Viteză absolută. Metoda "îngheţării". Compunerea vitezelor în mişcarea relativă a punctului. Acceleraţie relativă, de transport, Coriolis. Acceleraţie absolută. Compunerea acceleraţiilor în mişcarea relativă a punctului. Distribuţia de viteze pe rigidul în mişcare relativă. Generalizare : analogia statico-cinematică. Compuneri particulare de mişcări relative.
ω
u O
M
y1
y
θ
x x1

Cinematica A. Vasilescu
112
NNoottaaţţiiii
aa acceleraţie absolută
ac acceleraţia Coriolis
at acceleraţie de transport
ar acceleraţie relativă
va viteză absolută
vr viteză relativă
vt viteză de transport
,ε θ acceleraţie unghiulară
θ unghi (de rotaţie)
,ω θ viteză unghiulară
10a acceleraţia originii triedrului T1 faţă de triedrul T0
21a acceleraţia originii O2 a triedrului T2, faţă de triedrul T1
, ,...OM v mărimi vectoriale
10v viteza originii O1 a triedrului T1 faţă de triedrul fix T0
21v viteza originii O2 a triedrului T2, faţă de triedrul T1
, ,i j k versorii axelor carteziane
10ε acceleraţie unghiulară în mişcarea triedrului T1 faţă de triedrul T0
21ε acceleraţie unghiulară în mişcarea relativă a rigidului faţă de triedrul T1
10ω viteză unghiulară a triedrului T1 faţă de triedrul T0
20ω viteză unghiulară absolută
21ω viteză unghiulară în mişcarea relativă a rigidului faţă de triedrul T1

Cinematica mişcării relative Mişcarea relativă a punctului
113
3.1. MIŞCAREA RELATIVĂ A PUNCTULUI 3.1.1. Generalităţi Până acum a fost studiată mişcarea unui punct sau a unui solid rigid în raport cu un reper fix, dar în numeroase situaţii este necesar să se studieze mişcarea în raport cu repere mobile. Se consideră două sisteme de referiţă (repere): unul fix x1O1y1 şi al doilea mobil xOy. Se pot pune în evidenţă trei mişcări ale aceluiaşi punct:
Mişcarea absolută este mişcarea punctului faţă de sistemul de referinţă fix, x1O1y1.
Se numeşte viteză absolută (respectiv acceleraţie absolută) viteza (respectiv acceleraţia) punctului în această mişcare.
Mişcarea relativă este mişcarea punctului faţă de sistemul de referinţă mobil xOy, ca şi cum acesta ar fi fix.
Se numeşte viteză relativă (respectiv acceleraţie relativă) viteza (respectiv acceleraţia) punctului în această mişcare.
Mişcarea de transport este mişcarea faţă de sistemul de referinţă fix a unui punct solidar legat cu sistemul de referinţă mobil, care în momentul considerat coincide cu punctul studiat.
Se numeşte viteză de transport (respectiv acceleraţie de transport) viteza (respectiv acceleraţia) punctului solidar cu reperul mobil. Expresiile acestor mărimi vectoriale sunt cunoscute de la studiul mişcării solidului rigid : t Ov v rω= + × ( )t Oa a r rε ω ω= + × + × × Această mişcare de transport mai poate fi realizată imobilizând punctul faţă de sistemul de referinţă mobil ("îngheaţă" mişcarea relativă) şi mişcându-l odată cu acesta.
Exemplu:
Se consideră un râu care curge cu o viteză dată şi o barcă a cărei viteză în raport cu apa unui lac este cunoscută. Mişcarea râului, privit ca un mediu mobil, reprezintă mişcarea de transport (motorul bărcii ar fi oprit). Mişcarea bărcii în raport cu apa râului (ca şi cum aceasta ar avea viteza nulă) reprezintă mişcarea relativă, iar mişcarea absolută este mişcarea bărcii în raport cu malul râului pe care îl vom cosidera mediul fix. Obiectul studiului constă în determinarea uneia din cele trei mişcări atunci când celelalte două sunt cunoscute, dar majoritatea aplicaţiilor practice se referă la stabilirea mişcării absolute când mişcarea relativă şi de transport sunt precizate.

Cinematica A. Vasilescu
114
3.1.2. Derivata absolută şi relativă a unui vector Studiul mişcării relative a unui punct necesită mai întâi determinarea derivatei unui vector ( )U t (fig. 3.1) exprimat prin proiecţiile sale faţă de un sistem de referinţă mobil xOyz : x y zU U i U j U k= + + (3.1) Se consideră că mişcarea sistemului de referinţă mobil este cunoscută în raport cu un sistem de referinţă fix x1O1y1z1, având versorii 1i , 1j şi 1k . Derivata în raport cu timpul a vectorului ( )U U t= este
( ) ( )x y z x y zdU U i U j U k U i U j U kdt
= + + + + + (3.2)
Se identifică în relaţia anterioară următorii trei termeni : primul este dU Udt
= şi
reprezintă derivata absolută a vectorului U ; al doilea termen este
x y zUU i U j U kt
∂+ + =∂
şi are semnificaţia derivatei vectorului U atunci
când se consideră versorii i , j şi k constanţi (sistemul de referinţă mobil este de fapt considerat fix sau mişcarea de transport este "îngheţată"). Această derivată se numeşte derivata relativă sau locală ; al treilea termen se scrie ţinând cont de formulele lui Poisson (2.15), adică se explicitează derivatele
versorilor mobili i , j şi k
( ) ( ) ( )
( )x y z x y z
x y z
U i U j U k U i U j U k
U i U j U k U
ω ω ω
ω ω
+ + = × + × + × =
= × + + = × (3.3)
Relaţia (3.2) are expresia finală :
dU U Udt t
ω∂= + ×∂
(3.4)
Observaţie
Derivata absolută (3.4) este exprimată în funcţie numai de vectori definiţi în sistemul de referinţă mobil, ceea ce va furniza avantaje majore în abordarea anumitor aspecte ale mişcărilor compuse.
O1
y
z z1
y1 x
x1
j k
i
i1
k
j1
rO
U
Fig. 3.1.
O

Cinematica mişcării relative Mişcarea relativă a punctului
115
3.1.3. Compunerea vitezelor Se consideră un punct M raportat la două sisteme de referinţă (fig. 3.2): primul este fix x1O1y1, iar al doilea mobil xOy. Se scrie relaţia: rrr O +=1 (3.5) Derivând în raport cu timpul relaţia (3.5) se obţine:
dtrd
dtrd
dtrd O +=1 (3.6)
Primii doi termeni reprezintă viteze, observând că:
OO v
dtrd = (3.7)
Pentru stabilirea derivatei vectorului de poziţie OMr = al punctului M în sistemul de
referinţă mobil, se face apel la cinematica solidului rigid, faţă de care ne vom raporta în continuare. Relaţia (3.6) este identică cu (2.2). S-a stabilit că pentru r constant ca mărime, dar variabil ca direcţie, derivata lui în raport cu
timpul este conform (3.4) produsul vectorial: rdtrd ×= ω . Aici există o
diferenţă: vectorul de poziţie OMr = nu mai este constant ca mărime, deci se
face şi o derivată locală tr
∂∂
, care se adaugă la termenul anterior şi se obţine:
rtr
dtrd ×+= ω
∂∂
(3.8)
Relaţia (3.6) devine:
1O
dr rv rdt t
∂ ω∂
= + + × (3.9)
Conform definiţiilor mişcărilor date, se identifică: viteza absolută dtrdva1= ,
viteza relativă rrvt
∂∂
= şi viteza de transport rvv Ot ×+= ω , rezultând
după înlocuire în (3.9) relaţia de compunere a vitezelor:
tra vvv += (3.10)
Fig. 3.2.
O1 y
z z1
y1 x
x1
r
O rO
r1
M(x,y,z)

Cinematica A. Vasilescu
116
3.1.4. Compunerea acceleraţiilor Pentru calculul acceleraţiilor se trece la derivarea în raport cu timpul a relaţiei (3.10):
dtrdr
dtd
tr
tdtvd
dtrd O ×+×+
+= ωω
∂∂
dd
21
2 (3.11)
Deoarece vectorul tr
∂∂
este definit în sistemul mobil, atunci derivata sa în raport
cu timpul, se calculează după regula derivării vectorului r , stabilită în formula (3.8):
tr
tr
tr
tr
ttr
t ∂∂ω
∂∂
∂∂ω
∂∂
∂∂
∂∂ ×+=
×+
=
2
2
dd
(3.12)
Înlocuind (3.8) şi (3.12) în (3.11), se obţine:
2 2
11 2 2 ( ) 2O
d r r rr a r rtdt t
∂ ∂ε ω ω ω∂∂
= = + + × + × × + × (3.13)
Din definiţiile anterioare se găsesc:
- acceleraţia absolută, acceleraţia punctului M faţă de sistemul fix: 21
2
dtrdaa = ;
- acceleraţia relativă, acceleraţia punctului M faţă de sistemul mobil, ca şi când
acesta ar fi fix: 2
2
trar ∂
∂= ;
- acceleraţia de transport, acceleraţia punctului M solidar legat cu sistemul mobil, în mişcare faţă de cel fix )( rraa Ot ××+×+= ωωε ;
- termenul rc vtra ×=×= ω
∂∂ω 22 (3.14)
se defineşte a fi acceleraţia Coriolis, exprimând influenţa simultană a mişcării de transport şi a mişcării relative. În concluzie, se scrie relaţia (3.13) sub forma:
ctra aaaa ++= (3.15) care reprezintă relaţia de compunere a acceleraţiilor. Observaţie Metodele de rezolvare a problemelor de mişcare relativă a punctului material pot fi geometrice, dacă se folosesc relaţiile de compunere (3.10) şi (3.15) sau analitice, dacă se utilizează expresiile vectoriale (3.9) şi (3.13).

Cinematica mişcării relative Mişcarea relativă a rigidului
117
3.2. MIŞCAREA RELATIVĂ A RIGIDULUI
3.2.1. Generalităţi Mişcarea unui solid rigid a fost studiată în capitolul al doilea considerând un sistem de referinţă fix. Acum se pune problema studiului mişcării unui solid rigid într-un sistem de referinţă mobil. Pentru început, se consideră în figura 3.3 triedrul fix T0(x0, y0, z0), triedrul mobil T1(x1, y1, z1) având o mişcare cunoscută şi solidul rigid cu triedrul solidar acestuia T2(x2, y2, z2). În general, ca şi la mişcarea relativă a punctului se cunoaşte mişcarea rigidului faţă de triedrul T1 şi mişcarea triedrului T1 faţă de triedrul fix T0. Se cere să se determine mişcarea rigidului faţă de triedrul fix T0, adică distribuţia de viteze şi distribuţia de acceleraţii. Vectorii care definesc mişcarea rigidului faţă de triedrul T1 sunt : 21v – viteza originii O2 a triedrului T2, faţă de triedrul T1; 21ω – viteza unghiulară în mişcarea relativă a rigidului faţă de triedrul T1; 21a – acceleraţia originii O2 a triedrului T2, faţă de triedrul T1; 21ε – acceleraţia unghiulară în mişcarea relativă a rigidului faţă de triedrul T1. Mişcarea triedrului T1 faţă de triedrul fix T0 este cunoscută prin vectorii : 10v – viteza originii O1 a triedrului T1 faţă de triedrul fix T0; 10ω – viteza unghiulară a triedrului T1 faţă de triedrul T0; 10a – acceleraţia originii triedrului T1 faţă de triedrul T0; 10ε – acceleraţia unghiulară în mişcarea triedrului T1 faţă de triedrul T0. Determinarea distribuţiilor de viteze şi de acceleraţii în mişcarea relativă a rigidului se face folosind acelaşi mod de abordare prezentat la cinematica mişcării relative a punctului. Prin urmare, trebuie să se afle viteza absolută şi acceleraţia absolută a unui punct oarecare M aparţinând rigidului şi vectorii viteză unghiulară absolută, 20ω şi acceleraţie unghiulară absolută, 20ε în mişcarea rigidului faţă de triedrul fix T0.
M
O1
y2
z2 z0
y0
x
x1
r1
Fig. 3.3. x0
y1
z1
x2
ω21
O2
O0
v10 ω10
r2
v21

Cinematica A. Vasilescu
118
3.2.2. Studiul vitezelor Viteza unui punct oarecare M al rigidului faţă de triedrul fix T0 se obţine folosind rezultatele de la stabilirea vitezei absolute în mişcarea relativă a punctului. Se poate face următoarea paralelă între cele două mişcări relative ale punctului şi respectiv, rigidului : • mişcarea relativă a punctului devine aici mişcarea relativă a rigidului; • mişcarea de transport a punctului este tot o mişcare de rigid, dar se face
referire la toate punctele rigidului (nu numai la unul singur). Astfel se poate considera că punctul M (oarecare al corpului) se mişcă odată cu rigidul în raport cu triedrul T1, care la rândul său se mişcă faţă de triedrul fix T0. Mai întâi stabilim viteza relativă a punctului M în raport cu triedrul T1 presupus fix, ca fiind viteza unui punct solidar triedrului T2, aflat evident în mişcare faţă de triedrul T1. Se cunosc în această mişcare 21v , viteza originii O2 şi 21ω , viteza unghiulară a triedrului T2, iar punctul M are vectorul de poziţie
2O M (fig. 3.3). Prin urmare, viteza relativă are expresia dată de formula fundamentală a cinematicii solidului rigid : 21 21 2rv v O Mω= + × (3.16) Viteza de transport a punctului M va fi viteza faţă de triedrul fix a punctului solidar triedrului mobil T1, punct care coincide cu M. Mişcarea triedrului T1 faţă de T0 este caracterizată prin 10v şi 10ω , iar 1O M este vectorul de poziţie al punctului M în triedrul T1 (fig. 3.3). Viteza de transport are atunci expresia : 10 10 1tv v O Mω= + × (3.17) Rezultă viteza absolută : 10 21 10 1 21 2M r tv v v v v O M O Mω ω= + = + + × + × (3.18) Pentru calculul vitezei unghiulare absolute 20ω , se consideră punctul N aparţinând rigidului, pentru care se rescrie relaţia (3.18) : 10 21 10 1 21 2Nv v v O N O Nω ω= + + × + × (3.19) Din relaţiile (3.18) şi (3.19) se stabileşte : 10 21( )N Mv v MNω ω− = + × (3.20) de unde 10 21( )N Mv v MNω ω= + + × (3.21) Pe de altă parte, fără a considera mişcarea relativă, pentru cele două puncte se poate aplica formula fundamentală a cinematicii solidului rigid : 20N Mv v MNω= + × (3.22)

Cinematica mişcării relative Mişcarea relativă a rigidului
119
Comparând relaţiile (3.21) şi (3.22) se obţine 20 10 21ω ω ω= + (3.23) Interpretarea relaţiilor (3.18) şi (3.23) poate furniza unele observaţii interesante care sunt prezentate în continuare. Observaţia 1 : Distribuţia de viteze Distribuţia de viteze pe rigidul în mişcare relativă (distribuţie stabilită faţă de triedrul fix) este caracterizată de o translaţie instantanee 20v şi o rotaţie instantanee 20ω , conform relaţiei (3.23). Într-adevăr, se poate scrie formula fundamentală a cinematicii solidului rigid în raport cu triedrul fix, direct pentru punctul M : 20 20Mv v OMω= + × (3.24) Deoarece 20v , viteza originii triedrului T2 este :
20 10 21 21 1 2v v v O Oω= + + × (3.25) rezultă că, vectorul translaţie instantanee 20v conţine pe lângă suma vectorială a celor două translaţii componente ( 10v , respectiv 21v ) şi produsul vectorial
21 1 2O Oω × , în timp ce vectorul rotaţie instantanee 20ω este suma vectorială a rotaţiilor componente, conform relaţiei (3.23). Observaţia 2 : Generalizare
Relaţiile (3.18) şi (3.23) pot fi generalizate pentru mai multe mişcări de transport (fig. 3.4). Viteza absolută se scrie :
10 21 , 1 10 1 21 2 , 1... ...M n n n n nv v v v O M O M O Mω ω ω− −= + + + + × + × + + ×sau sub formă condensată :
, 1 , 11 1
n n
M i i i i ii i
v v O Mω− −= =
= + ×∑ ∑ , (3.26)
iar viteza unghiulară absolută are expresia :
0 , 11
n
n i ii
ω ω −=
= ∑ (3.27)
ceea ce înseamnă că viteza unghiulară absolută (în mişcarea rigidului faţă de sistemul fix) este suma vectorială a vitezelor unghiulare relative în mişcările componente.
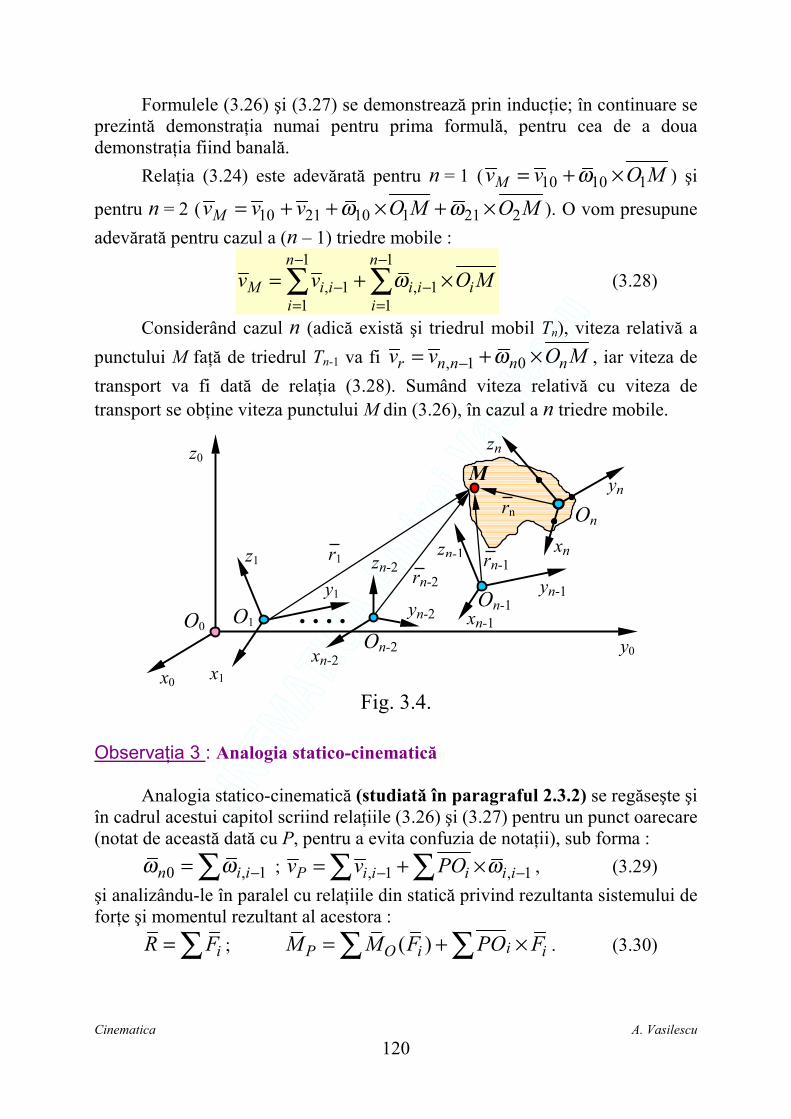
Cinematica A. Vasilescu
120
Formulele (3.26) şi (3.27) se demonstrează prin inducţie; în continuare se prezintă demonstraţia numai pentru prima formulă, pentru cea de a doua demonstraţia fiind banală. Relaţia (3.24) este adevărată pentru n = 1 ( 10 10 1Mv v O Mω= + × ) şi
pentru n = 2 ( 10 21 10 1 21 2Mv v v O M O Mω ω= + + × + × ). O vom presupune adevărată pentru cazul a (n – 1) triedre mobile :
1 1
, 1 , 11 1
n n
M i i i i ii i
v v O Mω− −
− −= =
= + ×∑ ∑ (3.28)
Considerând cazul n (adică există şi triedrul mobil Tn), viteza relativă a punctului M faţă de triedrul Tn-1 va fi , 1 0r n n n nv v O Mω−= + × , iar viteza de transport va fi dată de relaţia (3.28). Sumând viteza relativă cu viteza de transport se obţine viteza punctului M din (3.26), în cazul a n triedre mobile.
Observaţia 3 : Analogia statico-cinematică Analogia statico-cinematică (studiată în paragraful 2.3.2) se regăseşte şi în cadrul acestui capitol scriind relaţiile (3.26) şi (3.27) pentru un punct oarecare (notat de această dată cu P, pentru a evita confuzia de notaţii), sub forma : 0 , 1n i iω ω −= ∑ ; , 1 , 1P i i i i iv v PO ω− −= + ×∑ ∑ , (3.29) şi analizându-le în paralel cu relaţiile din statică privind rezultanta sistemului de forţe şi momentul rezultant al acestora : iR F= ∑ ; ( ) iP O i iM M F PO F= + ×∑ ∑ . (3.30)
Fig. 3.4.
M yn
zn z0
y0
r1
x0
xn
On-2 xn-2
yn-2
zn-2
On
O0 O1
x1
y1
z1 rn-1
rn
On-1 . . . . xn-1
zn-1
rn-2 yn-1

Cinematica mişcării relative Mişcarea relativă a rigidului
121
De asemenea, există o analogie între cele două formule numite fundamentale din cinematică şi statică, formule scrise pentru două puncte P şi Q ale rigidului. Astfel, relaţia care leagă vitezele celor două puncte este : 0P Q nv v PQ ω= + × , (3.31) iar relaţia din statică care arată variaţia momentului rezultant al sistemului de forţe se scrie : P QM M PQ R= + × (3.32) Din relaţiile (3.29) ... (3.32) se deduce că vectorul viteză unghiulară
, 1i iω − este analog vectorului forţă iF , vectorul viteză unghiulară absolută 0nω
este analog vectorului rezultant al sistemului de forţe R , vectorul viteză , 1i iv −
este analog vectorului moment ( )O iM F , vectorul viteză absolută Pv este analog vectorului moment rezultant PM calculat în raport cu punctul P. Aşa cum la statică, cercetarea torsorului de reducere (rezultantă şi moment rezultant al sistemului de forţe) a condus la concluzii asupra sistemului de forţe, tot astfel în cinematică se pot trage concluzii privind mişcarea rigidului din analiza torsorului distribuţiilor de viteze ( 0nω şi Pv ). Prin analogie cu cazurile de reducere ale sistemelor de forţe din statică, în cazul cunoaşterii mişcării absolute, analiza sistematică a distribuţiei de viteze în mişcarea relativă a rigidului, se poate rezuma la următoarele patru cazuri :
Tabelul 3.1. 1) 0 0nω = 0Pv = – rigidul este în repaus faţă de triedrul fix;
2) 0 0nω = 0Pv ≠ – distribuţia de viteze este aceea a unei translaţii de viteze Pv ;
3) 0 0nω ≠ 0Pv = – distribuţia de viteze este aceea a unei rotaţii de viteză unghiulară 0nω în jurul axei instantanee ce trece prin punctul P;
4) 0 0nω ≠ 0Pv ≠ a) 0 0n Pvω =
– distribuţia de viteze este aceea a unei rotaţii de viteză unghiulară
0nω în jurul axei instantanee ce trece prin punctul A, definit în
raport cu punctul P prin vectorul ( ) 20 0/n P nPA vω ω= ×
b) 0 0n Pvω ≠
– distribuţia de viteze este aceea a unei mişcări elicoidale în jurul axei instantanee ce trece prin punctul A, definit în raport cu punctul
P prin vectorul ( ) 20 0/n P nPA vω ω= ×
Invarianţii cinematici ai mişcării sunt 0nω şi proiecţia vitezei în lungul axei instantanee ( )0 0/n P nv vω ω ω= .

Cinematica A. Vasilescu
122
Observaţia 4 : Compuneri particulare de mişcări
Determinarea vectorilor rezultanţi fundamentali 0nω şi Pv se face urmând procedura de reducere a vectorilor alunecători , 1i iω − (rotaţii) şi a
vectorilor liberi , 1i iv − (translaţii). Se pot enumera câteva cazuri uzuale de compuneri particulare de mişcări :
– Translaţii paralele, concurente sau coplanare. Acest tip de compunere corespunde cazului al doilea din tabelul 3.1, obţinându-se în final tot o mişcare de translaţie dacă , 1 0P i iv v −= ≠∑ sau stare de repaus
dacă , 1 0P i iv v −= =∑ (de exemplu, o pereche de translaţii opuse şi egale în modul echivalează cu starea de repaus). Un exemplu de compunere de translaţii coplanare este arătat în figura 3.5.
– Rotaţii în jurul unor axe instantanee concurente sau paralele. Pentru cazul rotaţiilor concurente, care corespunde cazului al treilea din tabelul 3.1, se obţine în final tot o mişcare de rotaţie, dacă 0 , 1 0n i iω ω −= ≠∑ sau repaus,
dacă în mod particular 0 , 1 0n i iω ω −= =∑ . În figura 3.6 se prezintă un exemplu de compunere a două rotaţii concurente.
Dacă rotaţiile sunt paralele, folosind analogia statico-cinematică pentru compunerea vectorilor paraleli
, 1i iω − , obţinem ca rezultat o distribuţie de viteze caracteristică unei rotaţii, axa instantanee a mişcării rezultante trecând prin centrul vectorilor paraleli , 1i iω − . În cazul particular pentru care suma acestora este nulă ( 0 , 1 0n i iω ω −= =∑ )
ne întâlnim cu două posibilităţi : mişcarea rezultantă este o translaţie dacă viteza unui punct oarecare P al rigidului este nenulă ( 0Pv ≠ ) sau se obţine o stare de repaus dacă 0Pv = . – Rotaţii şi translaţii. Cazul acesta se poate reduce la cel precedent, deoarece orice translaţie poate fi înlocuită printr-un cuplu de rotaţii.
v2
v3
v1
Fig. 3.5.
Fig. 3.6.
ω ω2
ω2 ω1
ω1

Cinematica mişcării relative Mişcarea relativă a rigidului
123
3.2.3. Studiul acceleraţiilor Studiul acceleraţiilor în mişcarea relativă a rigidului se abordează presupunând cunoscute ditribuţia de viteze şi de acceleraţii faţă de un triedru mobil T1 şi distribuţia de viteze şi de acceleraţii în mişcarea triedrului mobil T1 faţă de triedrul fix T0. Se cere determinarea distribuţiei de acceleraţii în mişcarea rigidului faţă de triedrul fix T0. Se consideră pentu început numai trei triedre: cel fix T0, cel mobil T1 şi cel solidar rigidului T2 (fig 3.2). Utilizând metoda compunerii mişcărilor studiată în cadrul mişcării relative a punctului, se calculează acceleraţia absolută a unui punct M oarecare al rigidului ca fiind suma acceleraţiilor : relativă, de transport şi Coriolis. Acceleraţia relativă a punctului M este acceleraţia punctului M faţă de triedrul mobil T1 şi are expresia : ( )21 21 2 21 21 2ra a O M O Mε ω ω= + × + × × (3.33)
Acceleraţia de transport este acceleraţia faţă de triedrul T0, a unui punct solidar triedrului T1 care în momentul considerat coincide cu punctul M. Deci : ( )10 10 1 10 10 1ta a O M O Mε ω ω= + × + × × (3.34)
Acceleraţia Coriolis se calculează considerând viteza relativă dată de relaţia (3.16), 21 21 2rv v O Mω= + × , iar viteza unghiulară de transport fiind
10tω ω= . Astfel :
10 21 21 22 2 ( )c t ra v v O Mω ω ω= × = × + × (3.35) Acceleraţia absolută se determină cu formula cunoscută (3.15) : a r t ca a a a= + + (3.36) Înlocuind în (3.36) relaţiile (3.33)...(3.35) rezultă acceleraţia absolută a punctului M în mişcarea faţă de triedrul fix T0 :
( ) ( )10 21 10 1 10 1
10 10 1 21 21 2
10 21 21 2
2 ( )
Ma a a O M O M
O M O M
v O M
ε ε
ω ω ω ω
ω ω
= + + × + × +
+ × × + × × +
+ × + ×
(3.37)
Ca şi în cazul vitezelor, relaţia (3.37) poate fi generalizată pentru cazul mai multor triedre mobile T1, T2, ... Tn.

Cinematica A. Vasilescu
124
3.3. VERIFICATI-VĂ CUNOŞTINŢELE 3.3.1. Întrebări de autocontrol
(3.1. Mişcarea relativă a punctului) • Studiul mişcării punctului, atunci când aceasta este definită în raport cu un
reper mobil, implică considerarea a trei tipuri de mişcări : absolută, relativă şi de transport. Definiţi aceste mişcări.
• La stabilirea elementelor mişcării relative şi ale mişcării de transport se utilizează metoda "îngheţării". În ce constă această metodă?
• Să se arate acum, din punctul de vedere al identificării celor trei tipuri de mişcări, care este obiectul de studiu al acestui capitol al cinematicii.
• Să se definească noţiunile de derivată absolută şi de derivată relativă (locală) a unui vector definit într-un sistem de referinţă mobil.
• Versorii reperului mobil i , j şi k , au derivate în raport cu timpul nenule. De ce?
• Derivatele în raport cu timpul ale versorilor i , j şi k sunt date de formulele lui Poisson. Folosind aceste formule, să se calculeze expresia :
x y zU i U j U k+ + .
• Se cunoaşte mişcarea unui avion (asimilat unui punct) în raport cu Pământul, considerat ca planetă. Avionul se deplasează cu viteza u pe un meridian
(fig. 3.7). Această mişcare a avionului, în care dintre cele trei tipuri de mişcări se încadrează : absolută, relativă sau de transport? Dar mişcarea de rotaţie a Pământului în jurul axei sale?
• Vectorul U este definit în reperul mobil. La rândul ei, derivata absolută a acestui vector este exprimată numai funcţie de versorii i , j şi k . Care ar fi explicaţia acestui demers?
• Relaţia de compunere a vitezelor este scalară sau vectorială? Să se scrie această relaţie.
ω
u
Fig. 3.7.
O
M

Cinematica mişcării relative Verificaţi-vă cunoştinţele
125
• Compunerea acceleraţiilor are trei termeni din care primii doi sunt acceleraţia relativă şi acceleraţia de transport. Care este cel de-al treilea termen?
• Acceleraţia Coriolis are expresia : 2C ra vω= ×
unde ω este viteza unghiulară de transport. Se presupune că 0Ca = într-un interval de timp finit 0t∆ ≠ şi se ştie că produsul vectorial a doi vectori este nul dacă fiecare dintre vectorii componenţi este nul sau cei doi vectori sunt paraleli. Să se arate care dintre cele trei posibilităţi nu are semnificaţie în cadrul acestui capitol : a) 0ω = ; b) 0rv = ; c) rvω .
• Dacă 0ω = , ce fel de mişcare are reperului mobil?
(3.2. Mişcarea relativă a rigidului) • Să se arate care este numărul minim de triedre de referinţă folosit în studiul
mişcării relative a unui solid rigid.
• Se presupun cunoscute mişcarea de transport şi mişcarea relativă. Studiul mişcării relative a punctului avea ca obiectiv stabilirea traiectoriei, vitezei şi acceleraţiei absolute. Care este obiectivul urmărit în studiul mişcării relative a rigidului? Ce se mai cere în plus?
• Să se facă o paralelă între mişcarea relativă a punctului şi mişcarea relativă a rigidului.
• Ce aduce nou compunerea vitezelor în mişcarea relativă a solidului rigid, faţă de compunerea vitezelor în mişcarea relativă a punctului?
• Conform analogiei statico-cinematice, există o corespondenţă biunivocă (dar formală), între elementele torsorului de la reducerea sistemelor de forţe din statică, cu elementele torsorului distribuţiilor de viteze. Primul invariant în statica solidului rigid este iR F= ∑ , iar în cinematică 0 , 1n i iω ω −= ∑ . Să se caracterizeze fiecare dintre cei doi vectori rezultanţi după criteriul : vector legat, vector alunecător sau vector liber.
• Dacă se compun două translaţii concurente, atunci să se definească mişcarea rezultantă şi să se reprezinte grafic.
• Dar dacă se compun două translaţii opuse şi egale în modul, care este rezultatul? Comparaţie cu operaţia de compunere a două forţe direct opuse.
• Compunerea rotaţiilor concurente corespunde cazului al treilea din tabelul 3.1. Mişcarea rezultantă este tot o rotaţie dacă 0 , 1 0n i iω ω −= ≠∑ .
Ce se întâmplă dacă totuşi 0 0nω = şi în ce caz de reducere se încadreză?

Cinematica A. Vasilescu
126
3.3.2. Recapitularea formulelor esenţiale
Derivata absolută a unui vector ( )U t definit într-un sistem de referinţă mobil :
dU U Udt t
ω∂= + ×∂
(3.4)
unde dUdt
este derivata absolută (totală), iar Ut
∂∂
este derivata locală (relativă).
Relaţia de compunere a vitezelor : tra vvv += (3.10) unde av este viteza absolută, /rv r t= ∂ ∂ este viteza relativă, iar
rvv Ot ×+= ω este viteza de transport. Relaţia de compunere a acceleraţiilor : ctra aaaa ++= (3.15) unde aa este acceleraţia absolută, /r ra v t= ∂ ∂ este acceleraţia relativă,
)( rraa Ot ××+×+= ωωε este acceleraţia de transport, iar 2c ra vω= × este acceleraţia Coriolis. Mişcarea relativă a rigidului : Rigidul are o mişcare relativă faţă de un triedru T1. Mişcarea triedrului T1 este cunoscută în raport cu triedrul fix T0 ( 10v – viteza originii O1 a triedrului T1 faţă de triedrul fix T0; 10ω – viteza unghiulară în mişcarea relativă a triedrului T1 faţă de triedrul T0). Triedrul T2 este solidar rigidului şi este cunoscută mişcarea acestuia faţă de T1 ( 21v – viteza originii O2 a triedrului T2, faţă de triedrul T1; 21ω – viteza unghiulară în mişcarea relativă a rigidului faţă de triedrul T1). Viteza absolută a unui punct oarecare al rigidului este : 10 21 10 1 21 2Mv v v O M O Mω ω= + + × + × , (3.18) iar viteza unghiulară absolută are expresia : 20 10 21ω ω ω= + (3.23) Generalizare pentru mai multe mişcări de transport :
, 1 , 11 1
n n
M i i i i ii i
v v O Mω− −= =
= + ×∑ ∑ , 0 , 11
n
n i ii
ω ω −=
= ∑ (3.26), (3,27)

Cinematica mişcării relative Verificaţi-vă cunoştinţele
127
3.3.3. Îndrumări pentru rezolvarea problemelor
Tipuri de probleme
Citirea cu atenţie a enunţului problemei trebuie să conducă la identificarea cu claritate a celor trei tipuri de mişcări : relativă, de transport şi absolută. După structura datelor, problema din acest capitol poate fi încadrată în două categorii sau tipuri : 1. Problema clasică este problema în care două din cele trei tipuri de mişcări
sunt cunoscute. De cele mai multe ori, se cunosc mişcarea relativă şi mişcarea de transport şi se cere evident, aflarea elementelor mişcării absolute. Este important de precizat că în această formulare, cele două mişcări cunoscute (mişcarea relativă şi cea de transport) sunt independente.
2. Problema atipică este problema în care se cunosc unele elemente din toate cele trei tipuri de mişcări şi se cere stabilirea celorlalte elemente care conduc la definirea completă a mişcării relative, de transport şi absolute. Se face remarca extrem de utilă în rezolvare şi anume : între mişcarea relativă şi de transport există dependenţă care se manifestă în mod direct la interpretarea relaţiilor de compunere a vectorilor de poziţie şi apoi de compunere a vectorilor viteze.
Strategia de abordare
1) Strategia de abordare presupune utilizarea "metodei îngheţării" care duce rapid la o rezolvare corectă numai în cazul în care există o singură mişcare de transport. Metoda îngheţării este aplicată intuitiv chiar de la început, atunci când se prelucrează datele din enunţul problemei pentru a identifica cele trei tipuri de mişcări amintite. Metoda înghetării se aplică atât la rezolvarea problemei clasice, cât şi la rezolvarea problemei atipice. 2) Astfel, la rezolvarea problemei clasice, se "îngheaţă" (blochează sau stagnează) pe rând cele două mişcări sugerate în enunţ : mişcarea relativă şi apoi cea de transport. Se continuă cu deducerea succesivă a elementelor constitutive (traiectorie, viteză şi acceleraţie) pentru fiecare tip de mişcare. 3) Se va ţine seama că expresiile vectorilor rv , ra şi Ca se determină în reperul mobil, în timp ce mişcarea de transport este definită în reperul fix şi deci vectorii
tv şi ta se raportează la acesta (la reperul fix). De obicei este mai simplu să se calculeze av şi aa în raport cu reperul mobil, ca apoi să se scrie componentele acestor vectori în raport cu reperul fix. 4) Verificarea se face rezolvând problema din nou, ca pe o problemă directă de cinematică de punct.

Cinematica A. Vasilescu
128
3.3.4. Probleme rezolvate
PROBLEMA 3.1. Un inel M se deplasează pe o bară OA după legea 2 OM t= în timp ce bara se roteşte cu unghiul / 3tθ π= , în jurul axei fixe Oz (fig. 3.8). Să se studieze mişcarea inelului şi să se determine viteza absolută, precum şi acceleraţia absolută la o secundă de la începutul mişcării.
REZOLVARE: Se consideră utilă evidenţierea etapelor pentru rezolvarea acestei problemei pentru organizarea şi structurarea ideilor în analiza altor probleme de mişcare relativă a punctului.
1) Tipul de problemă : din analizarea datelor din problemă se constată că punctul se mişcă relativ la bara rectilinie (mişcarea relativă este rectilinie), în timp ce bara transportă punctul într-o mişcare de rotaţie (mişcarea de transport este rotaţia barei). Se trage concluzia că problema enunţată se încadrează în tipul de problemă clasică. 2) Analiza completă a mişcărilor : sistemul de referinţă mobil se alege cu axa Ox în lungul barei OA. Se identifică pe rând cele două tipuri de mişcări: relativă şi de transport : - mişcarea punctului M în lungul axei Ox, este mişcarea relativă a acestuia, care se desfăşoară după legea 2x t= . Prin derivare, se află viteza şi acceleraţia relativă : 2rv xi ti= = ; 2ra xi i= = . - mişcarea de transport este o rotaţie cu axă fixă (rotaţia barei) cu viteza unghiulară / 3 .constω θ π= = = , în care punctul M este considerat solidar cu sistemul mobil (mişcarea relativă este "îngheţată"). Viteza şi acceleraţia de transport sunt caracteristice unei mişcări circulare uniforme :
22 2 2; .
3 9t tv OM j t j a OM i t iπ πω ω= = = − = −
- acceleraţia Coriolis se calculează :
42 2 2 .3c ra v k ti tjπω θ= × = × =
3) Compunerea mişcărilor. Rezultă viteza şi acceleraţia absolută :
223a r tv v v ti t jπ= + = + .
r
O
M
x1
A y1
θ
Fig. 3.8.

Cinematica mişcării relative Verificaţi-vă cunoştinţele
129
2
2 429 3a r t ca a a a t i tjπ π
= + + = − +
La final, cei doi vectori av şi aa se proiectează pe axele sistemului de referinţă fix, înlocuind expresiile versorilor i şi j funcţie de versorii 1i şi 1j : 1 1cos sini i jθ θ= + , 1 1sin cosj i jθ θ= − + .
Se obţine : 2 21 1(2 cos sin ) (2 sin cos )
3 3av t t i t t jπ πθ θ θ θ= − + +
2 22 2
1 14 4[(2 )cos sin ] [(2 )sin cos ]
9 3 9 3aa t t i t t jπ π π πθ θ θ θ= − − + − +
4) Reprezentarea vectorilor av şi aa poate fi urmărită în figurile 3.9 şi 3.10.
5) Aplicaţie numerică. Corespunzător timpului 1 1st = de la începutul mişcării, punctul (inelul) se află pe bară la 1 m de origine, bara face unghiul de 60° cu axa O1x1, iar viteza şi acceleraţia absolută au expresiile:
1 1(1) 0,093 2,256 av i j= + ;
1 1(1) 3,176 2,877 aa i j= − − . 6) Verificare. Se tratează ca o problemă directă de cinematica punctului, urmărind etapele :
6.1) Gradul de mobilitate al inelului (asimilat cu un punct) este egal cu 2. Dacă considerăm bara fixă, atunci punctul ar avea un singur grad de libertate şi anume, deplasarea în lungul ei. Ţinând cont că bara se roteşte în jurul axei Oz, punctul M va căpăta şi a doua posibilitate de mişcare, împreună cu bara OA.
6.2) Tipul de problemă. Din enunţ sunt precizate coordonatele polare ale punctului M, deci problema este directă.
Spirala : r = C (teta)^2
0
0.5
1
1.5
2
2.5
3
3.5
4
-3 -2 -1 0 1
Fig. 3.11.
O M x1
y
θ
Fig. 3.10.
ac
ar x x aa
y1
at O
M x1
y
θ
Fig. 3.9.
vt
vr
x x va y1

Cinematica A. Vasilescu
130
6.3) Traiectoria. Se cunosc ecuaţiile parametrice : 2 r t= şi / 3tθ π= ⋅ . Se elimină timpul şi se obţine ecuaţia unei spirale (fig. 3.11) :
2 2 2/9 1,0966r π θ θ= = . 6.4) Calcule intermediare. Pentru calculul vitezei şi acceleraţiei este necesar să se calculeze primele două derivate în raport cu timpul ale funcţiilor ( )r t şi ( )tθ :
2r t= ; 2r = ; / 3 1,0472θ π= : 0θ = .
6.5) Viteza. Proiecţiile vitezei după direcţia radială şi normală sunt :
2v r tρ = = şi 2 21,04723nv r t tπθ= = = .
6.6) Acceleraţia. Proiecţiile acceleraţiei după cele două direcţii au expresiile : 2 22 1,0966a r r tρ θ= − = − 2 2 2 4,1888
3na r r t tπθ θ= + = ⋅ ⋅ = ⋅
6.7) Aplicaţia numerică. Pentru timpul 1 1t = s, se stabileşte :
a) poziţia punctului : 1 1r = m şi 1 3πθ = rad ;
b) viteza : 1 2v ρ = m/s, iar 1 1,0472nv = m/s
⇒1 12 2
1 2,2576nav v v v
ρ= = + = m/s
c) acceleraţia : 1 0,9034a ρ = m/s2 ; 1 4,1888na = m/s2
⇒1 12 2
1 4,2851naa a a a
ρ= = + = m/s2.
PROBLEMA 3.2. O bară cotită de forma unui cadru dreptunghiular ABCDEF (fig. 3.12) se roteşte cu viteză unghiulară constantă ω în jurul axei verticale AF, în timp ce pe latura verticală CD punctul M cade liber cu acceleraţia g. Se cere viteza şi acceleraţia absolută a punctului M, cunoscând lungimile laturilor BC=DE= R. REZOLVARE:
Sistemul de referinţă mobil este ataşat cadrului (cu axa Ox în planul cadrului, axa Oz este axa de rotaţie, verticală, în sus). Se identifică mişcările: mişcarea relativă este mişcarea rectilinie a lui M pe CD. Mişcarea de transport este mişcarea de rotaţie a cadrului, punctul

Cinematica mişcării relative Verificaţi-vă cunoştinţele
131
M ataşat cadrului, efectuând o mişcare circulară cu raza R şi viteza unghiulară ω . Mişcarea absolută este mişcarea punctului faţă de sistemul de referinţă fix. Viteza relativă este rv gtk= − , iar viteza de transport este tv R jω= şi rezultă viteza absolută (fig. 3.12)
a r tv v v= + ( r tv v⊥ ), 2 2 2 2 2 2
a r tv v v R g tω= + = + care se află în planul tangent la cilindrul generat prin rotire de latura CD. Acceleraţia relativă este cunoscută din enunţ: ra g= sau ra gk= − . Acceleraţia de transport are componenta tangenţială nulă 0ta τ = , ( 0ε ω= = ) urmând să se
determine numai componenta normală : 2ta R iν ω= − . Acceleraţia Coriolis
este nulă, deoarece vectorii ω şi r sunt paraleli. Rezultă acceleraţia absolută (fig. 3.13) :
a r t ca a a a= + + ,
sau 2a r ta a a R i gkν ω= + = − − . Deci aa se găseşte în planul vertical axial
al cilindrului şi are modulul egal cu : 2 2 2 2 4a r ta a a g Rν ω= + = + .
Traiectoria absolută a punctului este o elice pe cilindrul de rază R (fig. 3.14).
D
E ≡ O
F
M
Fig. 3.12.
vt
vr va
B A
C
x
y
z
x1
y1
ω
D
E
F
M
Fig. 3.13.
ar
B
A
C
aa
at
D
E
F
M
Fig. 3.14.
B A
C

Cinematica A. Vasilescu
132
PROBLEMA 3.3. O placă pătrată (fig. 3.15,a) participă simultan la trei rotaţii având vitezele unghiulare proporţionale cu lungimile segmentelor OA, AC, CB. Să se compună cele trei rotaţii. REZOLVARE: Cele trei rotaţii sunt coplanare şi se compun după regulile vectorilor alunecători : iωΩ = ∑ . Primele două viteze unghiulare 1ω şi 2ω (fig. 3.15,b) au ca rezultantă o viteză unghiulară în lungul laturii AB, care la rândul ei este compusă cu 3ω . Se obţine Ω =ω√2 pe direcţia diagonalei OB.
PROBLEMA 3.4. Un cub cu muchia egală cu a se roteşte simultan cu viteze unghiulare egale 1ω şi 2ω , în jurul a două muchii (fig. 3.16). Să se compună cele două rotaţii.
REZOLVARE. Fiind vorba de reducerea unui sistem de doi vectori alunecători, se stabileşte mai întâi torsorul în origine : 20 1 2 i kω ω ω ω ω= + = + şi
Ov a kω= − . Se identifică cazul 4 b (tabelul 3.1, pag. 121) pentru care distribuţia de viteze este aceea a unei mişcări elicoidale în jurul axei instantanee. Ecuaţia axei instantanee de rotaţie se obţine (similar axei centrale de la reducerea sistemelor de forţe) ca intersecţie a planului bisector x z= şi a planului / 2y a= , paralel cu planul lateral xOz (fig. 3.17). Invarianţii cinematici ai mişcării sunt 20ω şi proiecţia vitezei în lungul axei instantanee :
( )20 20/Ov v aω ω ω ω= = − .
O A
B C ω3=ω
ω2 =ω√2
ω1=ω O A
B C ω3=ω
ω2
ω1=ω
ω12=ω
O A
B C
Ω =ω√2
(b) (c) (a) Fig. 3.15
O
z
y
x ω2
ω1
Fig. 3.16
O
z
y
x
ω20
vω
Fig. 3.17

Capitolul 4 Cinematica sistemelor de solide rigide
133
CCaappiittoolluull 44 CCIINNEEMMAATTIICCAA SSIITTEEMMEELLOORR DDEE SSOOLLIIDDEE RRIIGGIIDDEE
CUVINTE CHEIE
Mecanism plan. Elemente. Baze. Centru absolut de rotaţie. Centru instantaneu de rotaţie relativă. Teoreme de coliniaritate ale centrelor de rotaţie. Distribuţii de viteze : metoda centrului instantaneu de rotaţie, metoda rabaterii vitezelor, metoda proiecţiilor vitezelor, metoda poligonului vitezelor.
ω=const
(I2)
45°
(I23)
(I1)
(I3)
30°
2l
2l
ω2
ω3
(I12)
v23
vM M
v12 1
3
2

Cinematica A. Vasilescu
134
NNoottaaţţiiii
( )Ad perpendiculara în A
(i), (j), (i, j) coliniaritatea centrelor de rotaţie absolute (i) şi (j), cu centrul relativ (i, j)
(i, j), (j, k), (i, k)
coliniaritatea centrelor de rotaţie relative a trei elemente (i), (j) şi (k)dintr-un mecanism
I (CIR) punctul I, centrul instantaneu de rotaţie
(Ii), (i) centrul absolut de rotaţie al elementului numărul i
(Iij), (i, j) centru instantaneu de rotaţie relativă al elementului numărul i faţă de elementul numărul j, considerat fix
asN numărul de articulaţii
CN numărul de corpuri sau de elemente în mişcare
.C absN numărul centrelor absolute de rotaţie
.C relN numărul centrelor instantanee de rotaţie relativă
GLN numărul gradelor de libertate
rsN numărul reazemelor simple ( )∆ dreaptă
θ unghi (de rotaţie)
,ω θ viteză unghiulară
1 12 1, ,...I I ω mărimi vectoriale
12v viteza (absolută) în centrul relativ de rotaţie (12)
/B Av viteza punctului B faţă de A (ca şI cum A ar fi fix)
iω viteză unghiulară absolută a elementului numărul i

Cinematica sistemelor de solide rigide Generalităţi
135
4.1. GENERALITĂŢI 4.1.1. Introducere
În anumite cursuri de mecanică acest capitol este cuprins în cadrul aplicaţiilor tehnice ale cinematicii, parte a unei discipline din Mecanica aplicată, denumită Teoria mecanismelor şi maşinilor, analizându-se transmisiile şi transformările mişcărilor de la un corp la altul sau mai precis, de la un organ de maşină la altul, care în ansamblu alcătuiesc un lanţ cinematic. Studiul cinematic al oricărui mecanism presupune stabilirea distribuţiilor de viteze şi de acceleraţii, precum şi determinarea traiectoriilor diferitelor puncte ale mecanismului. Obiectul acestui capitol îl constituie studiul distribuţiilor de viteze al unor mecanisme plane cu un grad de libertate, cunoscând geometria acestora (formele, dimensiunile şi poziţiile relative ale corpurilor), legăturile interne şi externe, precum şi unele mărimi cinematice privind starea mecanică a unor corpuri componente. Informaţiile furnizate în cadrul acestui capitol sunt cele strict necesare la abordarea capitolelor de dinamica sistemelor de solide rigide, cât şi a unor capitole din alte discipline ale Mecanicii aplicate care urmează a fi studiate în cadrul pregătirii inginereşti precum : Rezistenţa Materialelor, Statica, Stabilitatea şi Dinamica construcţiilor. Pornind de la noţiunile prezentate în cadrul capitolului din Statică privind echilibrul sistemelor de corpuri, s-a arătat că un sistem de corpuri, la care numărul gradelor de libertate este cel puţin egal cu unitatea, formează un mecanism. Pentru problema plană, relaţia corespunzătoare se scrie . 0GL Max GL LSN N N= − > (4.1) unde : GLN este numărul gradelor de libertate, . 3Max GL CN N= reprezintă numărul maxim de grade de libertate pe care le au toate corpurile constituente şi este evident egal cu de trei ori numărul de corpuri (notat NC) pentru problema plană, iar cu LSN se notează numărul legăturilor simple, distincte şi independente, interioare şi exterioare sistemului. Corpurile constitutive mobile ale mecanismului se numesc elemente, iar cele fixe se numesc baze; baza poate fi batiul unei maşini sau fundaţia unei construcţii. Corpul care pune sistemul în mişcare se numeşte element motor sau conducător. Celelalte corpuri se numesc elemente conduse. Mişcarea unui mecanism care este definită în mod unic se numeşte desmodromă. Elementele considerate în studiul cinematic al mecanismelor plane cu mişcare desmodromă vor fi de tip bară sau placă, iar legăturile de tip articulaţie cilindrică şi reazem simplu (pendul).

Cinematica A. Vasilescu
136
4.1.2. Centre de rotaţie Fiecare element al unui mecanism are un centru de rotaţie propriu, denumit centru absolut de rotaţie. Evident, acest centru este caracterizat prin viteza sa instantanee nulă. Într-un mecanism plan, elementele sale pot avea trei tipuri de mişcări: translaţie, rotaţie sau mişcare plană. În figura 4.1 se prezintă schema unui astfel de mecanism cu un grad de libertate : 3 2 3 3 2 3 2 1GL c as rsN N N N= − − = ⋅ − ⋅ − = , unde s-a notat cu cN numărul de corpuri sau elemente în mişcare, cu asN numărul de articulaţii şi cu rsN numărul reazemelor simple. Centrul absolut de rotaţie pentru elementul conducător (1) care are mişcare de rotaţie (fig. 4.1) este articulaţia fixă (I1), iar pentru elementul (2) care are mişcare plană este centrul instantaneu de rotaţie (I2). Cel de-al treilea corp (3) format din tija şi pistonul P, are mişcare de translaţie pe direcţia orizontală. Considerând că translaţia este o rotaţie de rază infinită, se admite că centrul absolut de rotaţie (I3) se găseşte la infinit, pe direcţia normală distribuţiei de viteze. Se deduce că
Numărul centrelor absolute de rotaţie este egal cu numărul de corpuri ( .C abs cN N= ).
Centrele absolute de rotaţie pot fi puncte fixe (articulaţiile fixe) în cazul mişcării de rotaţie şi translaţie sau puncte mobile (centrele instantanee de rotaţie) în cazul mişcării plane. Considerând două elemente ale mecanismului, mişcarea unui element în raport cu celălalt considerat fix este o mişcare relativă, care pune în evidenţă un centru instantaneu de rotaţie relativă. Dacă două elemente au o articulaţie comună, centrul relativ este chiar această articulaţie. În figura 4.1 centre relative sunt articulaţiile (I12) şi (I23). Dacă elementele considerate sunt legate prin intermediul altor corpuri, atunci centrul relativ poate fi considerat ca fiind punctul în care cele două elemente au aceiaşi viteză în raport cu un reper fix. Pentru un mecanism format din n elemente, numărul centrelor instantanee de rotaţie relativă este 2
. ( 1) / 2C rel n c cN C N N= = − .
Fig. 4.1.
1 2
P
(I2)
(I23) (I1)
Ω
v23 ω
v12
(I 3)
3
(I12)

Cinematica sistemelor de solide rigide Teoreme de coliniaritate
137
4.2. TEOREME DE COLINIARITATE Centrele instantanee de rotaţie ale unui mecanism plan cu un grad de libertate ocupă poziţii care pot fi stabilite cu ajutorul a două teoreme de coliniaritate. 4.2.1. Prima teoremă
Într-un mecanism plan cu un grad de libertate, centrele absolute a două elemente oarecare (i), (j) şi centrul instantaneu relativ corespunzător celor două elemente (i,j) sunt coliniare.
Demonstraţie Se presupun cunoscute poziţiile centrelor absolute a două corpuri, aflate în planul xOy şi notate cu I1, respectiv cu I2 (fig. 4.2). Centrul instantaneu de rotaţie relativă notat cu I12 are aceiaşi viteză absolută v dacă este considerat pe rând ca aparţinând fiecărui corp. Putem scrie 1 1 2 212 12v I I I Iω ω= × = × (4.2) Deoarece vitezele unghiulare sunt normale pe planul sistemului de corpuri, acestea au expresiile 1 1kω ω= şi 2 2kω ω= . Se obţine după înlocuiri : 1 1 2 212 12( ) 0k I I I Iω ω× − = . (4.3) Anularea expresiei din paranteză conduce la
21 212 12
1I I I Iω
ω= (4.4)
care exprimă coliniaritatea centrelor I1, I2 şi I12.
(I1) ω1
(I12) v
(I2) ω2
Fig. 4.2.

Cinematica A. Vasilescu
138
4.2.2. A doua teoremă
Într-un mecanism plan cu un grad de libertate, centrele instantanee relative a trei corpuri oarecare(i), (j), (k), considerate două câte două, sunt coliniare : (i,j), (j,k), (i,k).
Demonstraţie Se consideră trei elemente ale unui mecanism plan având poziţiile centrelor de rotaţie cunoscute (fig. 4.3). Prima teoremă de coliniaritate se aplică de trei ori :
- centrul relativ I12 este coliniar cu centrele absolute I1 şi I2; - centrul relativ I23 se găseşte pe linia centrelor absolute I2 şi I3; - centrul relativ I13 este coliniar cu centrele absolute I1 şi I3.
Relaţia (4.4) se scrie pentru cele trei variante de mai înainte sub forma :
1 12 2
2 12 1
I II I
ωω
= ; 2 23 3
3 23 2
I II I
ωω
= ; 3 13 1
1 13 3
I II I
ωω
= (4.5)
Înmulţind membru cu membru expresiile (4.5), se obţine :
2 23 3 131 12
2 12 3 23 1 13 1I I I II I
I I I I I I⋅ ⋅ = (4.6)
Punctele I12, I23 şi I13 sunt coliniare deoarece relaţia (4.6) exprimă reciproca teoremei lui Menelaus, aplicată în triunghiul I1I2I3, secantă fiind dreapta I12I23I13.
Fig. 4.3.
(I3) ω3(I12)
v13 (I2)
ω2
(I13) (I1)
(I23)
ω1
v12 v23

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
139
4.3. STUDIUL DISTRIBUŢIILOR DE VITEZE Metodele de determinare a vitezelor punctelor unui mecanism sunt analitice, grafice sau grafo-analitice. În continuare se prezintă câteva dintre aceste metode. 4.3.1. Metoda centrului instantaneu de rotaţie Metoda se bazează pe proprietatea că distribuţia de viteze la un moment dat este aceeaşi cu cea dintr-o mişcare de rotaţie în jurul centrului instantaneu de rotaţie cu viteza unghiulară ω . Stabilirea poziţiei centrului instantaneu de rotaţie poate fi făcută analitic cu relaţiile (2.64) şi (2.66) sau grafic. În funcţie de aceasta, metoda centrului instantaneu de rotaţie se poate considera o metodă analitică sau grafo-analitică. În cazul când mai multe elemente ale mecanismului efectuează mişcări plane, atunci trebuie considerat pentru fiecare dintre acestea centrul instantaneu de rotaţie corespunzător. APLICAŢIA 4.1. Se consideră mecanismul din figura 4.4. Cunoscând viteza unghiulară ω=const, şi că cele două manivele au lungimile egale cu 2l, se cere să se determine distribuţia de viteze pentru poziţia figurată. Răspuns : Într-o primă etapă se stabileşte ce tip de mişcare efectuază fiecare element din mecanism : manivelele (elementele 1 şi 3) au în mod evident mişcări de rotaţie, iar bara care la cuplează (elementul 2) are mişcare plană. Urmează etapa identificării centrelor de rotaţie : centrele absolute sunt articulaţiile fixe I1 şi I3, iar centrele relative sunt articulaţiile mobile I12 şi I23. Centrul absolut I2 se află folosind prima teoremă de coliniaritate de două ori : I2 este coliniar cu I1 şi I12, apoi I2 este coliniar cu I3 şi I23, adică I2 este plasat la intersecţia prelungirii direcţiilor celor două manivele (fig. 4.4). Studiul distribuţiei de viteze este finalizat după aflarea vitezelor unghiulare ale elementelor mecanismului, folosind vitezele din centrele relative. Se află :
1 3 2 12 (3 3)I I I I l= = + , 1 2 (1 3)I I l= + ,
12 1 12 2 2 12v I I I Iω ω= ⋅ = ⋅ ; 2 23 2 3I I l=
23 3 3 23 2 2 23v I I I Iω ω= ⋅ = ⋅ ; 12 2v lω= ;
3 ( 3 1)ω ω= − ; 2 (1 3 /3)ω ω= − .
ω=const
(I2)
45°
(I23)
(I1)
(I3)
30°
2l
2l
ω2
ω3
(I12)
v23
vM
Fig. 4.4.
M
v12 1
3
2

Cinematica A. Vasilescu
140
4.3.2. Metoda rabaterii vitezelor Metoda rabaterii vitezelor este o metodă grafică care se bazează pe faptul că distribuţia de viteze în mişcarea plană este identică cu cea din mişcarea de rotaţie, dacă se cunoaşte poziţia centrului instantaneu de rotaţie (CIR). Particularitatea metodei constă deci în obligativitatea cunoaşterii poziţiei CIR sau cunoaşterea direcţiilor a două viteze pentru elementele mecanismului care au mişcare plană. Metoda are la bază următoarea proprietate a vitezelor :
Considerând două puncte M şi N ale unui element în mişcare plană, dreapta M1N1 obţinută prin rabaterea cu un unghi de 90º a vitezelor
Mv şi Nv , este paralelă cu dreapta MN.
Demonstraţie :
Pentru un element al mecanismului care are mişcare plană, se scriu mărimile vitezelor punctelor M şi N 1Mv MM IMω= = ⋅ ; 1Nv NN INω= = ⋅ . (4.7)
Prin împărţirea celor două relaţii se obţine proporţionalitatea unor segmente
1
1
MM IM
NN IN= ,
proporţionalitate care reprezintă teorema lui Thales în triunghiul IMN (fig. 4.5). Concluzia este că
1 1M N MN , ceea ce era de demonstrat.
APLICAŢIA 4.2. Se prezintă modul de aplicare al acestei metode pentru mecanismul din figura 4.6. Centrele absolute sunt notate cu cifre (1), (2) şi (3). Elementul (I) este
conducător ( 1ω este dat) şi se stabileşte viteza Mv din centrul relativ M al primelor două elemente. Se rabate Mv cu 90º în M1, apoi se duce paralela M1N1 la MN, unde N1 se găseşte pe raza (2)N. Se rabate cu 90º în sens contrar primei rabateri segmentul N1N şi se determină astfel viteza punctului N.
I (CIR) Fig. 4.5.
M1
M
N
N1
90º
90º vM
vN
Fig. 4.6.
M1 (2)
vN ω1
vM
( II ) (1)
(3) ( III )
( I ) N N1
M

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
141
4.3.3. Metoda proiecţiilor vitezelor Aplicarea în practică a teoremei proiecţiilor vitezelor conduce la metoda proiecţiilor vitezelor. Funcţie de specificul problemei, aplicarea metodei proiecţiilor vitezelor trebuie corelată cu alte proprietăţi ale distribuţiilor vitezelor, pentru a obţine rezultatele într-un mod convenabil, sub formă analitică sau grafică. Prin urmare, se reaminteşte enunţul teoremei proiecţiilor vitezelor : "proiecţiile vitezelor a două puncte din rigid pe dreapta care le uneşte, sunt egale şi de acelaşi sens" (vezi "Proprietatea 3", paragraful 2.1.2). Considerând două puncte A şi B, se scrie relaţia scalară corespunzătoare enunţului teoremei : pr pr AB A AB Bv v= sau cos cosA Bv vα β⋅ = ⋅ (4.8) Relaţia (4.8) se utilizează singură în sensul rezolvării următoarei probleme : cunoscând vectorul viteză Av şi suportul vitezei unui alt punct B (unghiul β) (fig. 4.7) , să se afle mărimea vitezei punctului B. Soluţia acestei probleme este
unică : analitic se află din (4.8) coscosB Av v α
β= , iar grafic se parcurg
următoarele trei etape: • se proiectează Av pe direcţia AB, în punctul A' ; • se construieşte în punctul B, în acelaşi sens segmentul BB' = AA' pentru a
respecta condiţia (4.8) ; • din B' se ridică perpendiculara pe AB, până intersectează suportul vitezei
punctului B. Acest punct de intersecţie reprezintă extremitatea vitezei Bv , deci se poate stabili mărimea Bv funcţie de Av respectând o anumită scară grafică. Reprezentatrea distribuţiei vitezelor pe o dreaptă dintr-un solid rigid necesită determinarea mai multor viteze. Dacă se cunosc vitezele a două puncte A şi B, se cere aflarea vitezei din punctul C, coliniar cu primele două (fig. 4.8). Grafic, se procedează în modul următor : se construieşte în punctul C segmentul
Fig. 4.7.
vAcosα B' B
vBcosβ α
β
vA
vB
A' A

Cinematica A. Vasilescu
142
CC' = AA' şi se ridică din C' perpendiculara (d). Extremitatea vectorului Cv se află undeva pe perpendiculara (d). Este limpede că mai este necesară o condiţie pentru stabilirea vitezei Cv . În continuare se prezintă trei variante. 1) Prima variantă : se utilizează "proprietatea 4" din paragraful 2.1.2, numită
"teorema coliniarităţii extremităţilor vectorilor viteză". Astfel, prin vârfurile vitezelor din punctele A şi B se duce dreapta (∆). La intersecţia acesteia cu dreapta (d) se află extremitatea vitezei punctului C (fig. 4.8).
Observaţia 1.
Aplicarea metodei proiecţiilor vitezelor în prima variantă, nu a necesitat aflarea poziţiei centrului instantaneu de rotaţie. 2) A doua variantă pentru identificarea condiţiei suplimentare o reprezintă
stabilirea poziţiei centrului instantaneu de rotaţie (la intersecţia perpendicularelor (dA) şi (dB) duse pe direcţiile vitezelor Av şi Bv – vezi figura 4.9) ; prin IC se duce normala care intersectează perpendiculara (d), stabilindu-se astfel extremitatea vitezei punctului C. Pentru verificare se unesc vârfurile vectorilor vitezelor punctelor A, B, C care se vor găsi pe dreapta (∆).
Fig. 4.8.
C B
α γ
vA
vC
A' A
(d)
vB C'
(∆)
Fig. 4.9.
•
C B •
vA
vC
A'
I
(dB)
vB C'
(∆) •
(d)
A
(dA)

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
143
3) A treia variantă constă în folosirea proprietăţii de liniaritate a
proiecţiilor vitezelor. Se pune în evidenţă această liniaritate construind diagramele proiecţiilor vitezelor pe două axe ortogonale.
Observaţia 2. • Sub această formă, metoda este întâlnită sub denumirea de "metoda
diagramelor proiecţiilor vitezelor" şi este utilizată intens la rezolvarea anumitor tipuri de probleme atât din "Mecanica analitică", dar mai ales la cele de la disciplina "Statica construcţiilor".
"Proprietatea 5" din paragraful 2.2.4 arată că într-o mişcare plană, distribuţia vitezelor este identică cu cea dintr-o mişcare de rotaţie , ca şi când rigidul s-ar roti cu viteza unghiulară instantanee ω în jurul centrului instantaneu de rotaţie. Prin urmare poate fi considerată relaţia (2.43) : Mv r yi xjω ω ω= × = − + , unde coordonatele x şi y sunt raportate la un sistem de referinţă cu originea în centrul absolut de rotaţie. Studiind proiecţiile vitezei punctului M care sunt : xv yω= − yv xω= , (4.9)
observăm că fiecare proiecţie are o variaţie liniară. Cum xv variază direct proporţional cu ordonata y, pe o linie de referinţă verticală, graficul acestei funcţii liniare xv yω= − este reprezentat sub forma unei dreapte (d1) care trece prin punctul O'. Punctul O' este evident, proiecţia centrului O care are viteza nulă (fig. 4.10). Similar se reprezintă variaţia funcţiei yv xω= . Graficul
Fig. 4.10.
O''
vy
M(x,y) y
x
vx
vy = ωx
vx = -ωy
•
•
r ω r
v
O' O
(d2) (d1)
v x
vy

Cinematica A. Vasilescu
144
acesteia este tot o dreaptă, notată cu (d2) care trece prin punctul O'', proiecţia centrului absolut (punct de viteză nulă) O. Conform teoremei proiecţiilor vitezelor, toate punctele rigidului aflate pe dreapta orizontală care trece prin punctul O, vor avea proiecţia vitezelor pe orizontală egală cu zero. În mod asemănător, punctele rigidului aflate pe o dreaptă verticală vor avea aceiaşi proiecţie yv , care este reprezentată în diagramă. Diagramele sunt desenate în afara rigidului, pentru claritate. În concluzie, cu ajutorul diagramelor proiecţiilor vitezelor se poate afla viteza oricărui punct din rigid, într-un mod direct : din diagrame se citesc în dreptul punctului considerat valorile proiecţiilor vitezelor
xv şi respectiv yv , pentru ca apoi să se calculeze mărimea vitezei cu relaţia
2 2x yv v v= + .
Observaţia 3. Cele două drepte (d1) şi (d2) sunt reciproc ortogonale deoarece au aceiaşi pantă (egală în valoare absolută cu ω ), drepte care sunt construite faţă de linii de referinţă ortogonale (fig. 4.10). Remarcă : Ortogonalitatea celor două drepte furnizează un mijoc extrem de util la trasarea diagramelor proiecţiilor vitezelor pentru mecanisme plane cu un grad de libertate, aşa cum se va prezenta în cadrul aplicaţiei 4.3 din acest paragraf. APLICAŢIA 4.3.
Bara AB are o mişcare plană. Se cunoaşte viteza Av a extremităţii A şi mărimea vitezei din extremitatea B. Aplicând metoda proiecţiilor vitezelor, să se determine Bv şi să se discute cazurile posibile (fig. 4.11).
Rezolvare : Se proiectează Av pe direcţia AB, în punctul A'. Apoi se desenează în acelaşi sens, segmentul BB' = AA'. Se ridică perpendiculara pe BB' şi se desenează un cerc cu centrul în punctul B, cu raza egală cu mărimea vitezei Bv . Din acest moment, se disting trei cazuri posibile : a) Dacă raza este mai mare decât
proiecţia BB' = AA', atunci se obţin două soluţii : punctele C1 şi C2,
Fig. 4.11.
B vA
A v2B
A' B'
C1 I1
v1B
C2
• •
•
I2
I1 ω1
ω2

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
145
care sunt extremităţile vitezelor 1Bv şi respectiv, 2Bv . De regulă este necesară o altă informaţie (spre exemplu, de precizat sensul de rotaţie al corpului), pentru a alege soluţia convenabilă. Se poate observa din figura 4.11, că pentru fiecare soluţie a problemei se obţin viteze unghiulare diferite ca valoare şi sens. Afirmaţia este justificată dacă se figurează poziţiile centrelor instantanee de rotaţie corespunzătoare celor două cazuri. Poziţiile lor sunt distincte şi pentru exemplul ales sunt plasate de o parte şi de alta a barei AB.
b) Dacă raza (mărimea vitezei Bv ) este egală cu proiecţia AA', atunci există o singură soluţie. Punctul B se numeşte punct caracteristic al distribuţiei de viteze pe bara AB, deoarece are viteza minimă (fig. 4.12).
c) Dacă raza cercului este mai mică decât proiecţia vitezei, atunci construcţia vitezei punctului B este imposibilă şi deci nu există soluţii.
Cazurile analizate grafic se regăsesc şi analitic. Din (4.8) unghiul β este :
cosarccos A
B
vv
αβ = ± .
Se compară cosAv α cu Bv : a) mai mic, b) egal, c) mai mare. APLICAŢIA 4.4. O placă de forma unui triunghi echilateral ABC cu latura l, are o mişcare plană : viteza vârfului A are valoarea vA = 2v0√3 (viteza v0 este dată) şi are direcţia bisectoarei unghiului BAC . Se cere să se determine vitezele celorlalte două vârfuri, ştiind că Cv este coliniară cu latura AC (fig. 4.13). Răspuns : Se determină mai întâi vectorul Cv , proiectând Av în punctul A1, pe latura AC. Deoarece viteza Cv este coliniară cu latura AC, atunci proiecţia AA1 este chiar mărimea vitezei Cv . În al doilea rând, viteza punctului B se stabileşte pe baza faptului că se cunosc două viteze : Av şi Cv . Se proiectează pe rând
Fig. 4.12.
B vA
A A' B'
I
vB •
I ω
•

Cinematica A. Vasilescu
146
cele două viteze, Av pe latura AB şi respectiv, Cv pe latura AC. În punctul B se construiesc în acelaşi sens proiecţiile AA' = BB' şi respectiv, BC' = CC1. Din B' şi respectiv C' se ridică perpendiculare, iar la intersecţia lor se află extremitatea vectorului viteză Bv . Rezultatul se interpretează folosind o anumită scară a vitezelor. Rezolvarea numerică este de altfel posibilă. Proiecţiile vitezei punctului A pe laturile adiacente sunt egale : 1 0' cos30 3AAA AA v v= = ° = . Proiecţia vitezei Cv pe latura BC este 1 0cos60 1,5CCC v v= ° = . Calculul mărimii vitezei punctului B se face rezolvând patrulaterul inscriptibil BB'DC' (fig. 4.14) : 0sin 3 / Bv vβ = şi 0sin(60 ) 1,5 / Bv vβ° − = , ⇒
04,58 1,32B Av v v= , 40 53'β ° .
Fig. 4.14.
β
vB C'
B'
D
B
60°–β
•
•
60°
B
C
(a)
vA
A
(b)
C
vA
A B
vC
vB C'
A' B'
C1
A1
Fig. 4.13.

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
147
4.3.4. Metoda poligonului vitezelor Metoda poligonului vitezelor este întâlnită în diferite tratate de mecanică şi sub alte două denumiri : metoda asemănării şi respectiv, metoda planului vitezelor şi a ecuaţiilor vectoriale. Denumirile diferite pun în evidenţă câte o caracteristică a metodei care în opinia diferiţilor autori, pare a fi dominantă. Metoda face parte din categoria metodelor grafice şi se bazează pe ecuaţia fundamentală a cinematicii rigidului scrisă pentru două puncte A şi B, sub forma : /B A B Av v v= + (4.10)
unde /B Av ABω= × este viteza punctului B faţă de A (ca şi cum ar fi fix) şi care are în mod evident suportul perpendicular pe direcţia AB (fig. 4.15). Se consideră un rigid aflat într-o mişcare plană (fig. 4.16, a). Se numeşte plan al vitezelor corespunzător rigidului, figura formată de vectorii , , ,A B Cv v v ... ce reprezintă vitezele diferitelor puncte A,B,C, ... ale rigidului, dacă toate aceste viteze sunt reprezentate într-un acelaşi punct O, numit polul vitezelor (fig. 4.16, b). Acest punct este de viteză nulă şi se observă cu uşurinţă că este corespondentul centrului instantaneu de rotaţie al rigidului, în planul vitezelor. În fond, relaţia vectorială de tipul (4.10) se poate rezolva grafic în planul vitezelor, fiind echivalentă cu două ecuaţii scalare din care se pot determina două necunoscute din mărimile caracteristice vectorilor viteză (modul, direcţie). Aplicarea metodei în mod practic se face în câteva etape. În primul rând, presupunând cunoscută viteza Av şi direcţia vitezei punctului B (βB), se găseşte poziţia centrului instantaneu de rotaţie ducând perpendiculare la Av şi βB, după
B
ω
vA
vB/A
A
vB
vA
Fig. 4.15.
Fig. 4.16.
b vB
vA vC
c
O
a
(b)
A vA β
vB
(a)
vC
I
B
C

Cinematica A. Vasilescu
148
care se determină vitezele punctelor Bv şi Cv (fig. 4.16, a). În punctul fix O se duc vectori echipolenţi vitezelor celor trei puncte şi se notează cu a, b, c extremităţile acestor vectori. Figura Ocab (numită poligonul vitezelor) este asemenea cu figura ICAB şi este rotită cu 90° faţă de aceasta, în sensul lui ω. Raportul de asemănare al celor două patrulatere este ω (teorema asemănării) deoarece :
CA B vv vIA IB IC
ω = = = (4.11)
Observaţia 1. Metoda poligonului vitezelor fiind o metodă grafică, necesită alegerea a două scări independente : prima pentru lungimi şi a doua pentru viteze. Absenţa scării pentru viteze are ca efect obţinerea unor rezultate care pot fi interpretate în mod evident, numai sub aspect calitativ, nu şi cantitativ. Observaţia 2. Dacă în poligonul vitezelor se schimbă scara vitezelor astfel încât ab = AB, figura abc poate fi adusă să se suprapună peste ABC (fig. 4.16) printr-o rotaţie de 90° în sensul opus lui ω, de această dată. În acest caz, polul O se suprapune peste centrul instantaneu de rotaţie I. Observaţia 3. Construcţia planului vitezelor se bazează pe relaţia /B A B Av v v= + şi
proprietatea /B Av BA⊥ . Observaţia 4. În cazul unui mecanism plan, în principiu, poligonul vitezelor trebuie construit pentru fiecare element al mecanismului. Practic, se poate construi un poligon al vitezelor pentru întregul mecanism, alegând acelaşi pol O pentru toate elementele mecanismului. Observaţia 5. Această metodă este utilizată frecvent în cinematica mecanismelor prin avantajele pe care le prezintă faţă de celelalte metode grafice.

Cinematica sistemelor de solide rigide Studiul distribuţiilor de viteze
149
APLICAŢIA 4.5. Barele mecanismului plan reprezentat în figura 4.17, au lungimile : O1A = O2B = 3m, AB = 4m, CD = O3D = 2m, iar articulaţia C se găseşte la jumătatea lungimii barei O2B şi pe aceiaşi orizontală cu articulaţia O3. Cunoscând viteza
Av , să se determine viteza articulaţiei interioare D, folosind metoda poligonului vitezelor.
Rezolvare : Se alege punctul fix O şi se desenează vectorul Oa echipolent cu Av (fig. 4.18). Deoarece bara AB are o mişcare plană şi deci
ab AB⊥ , rezultă că ducând prin extremitatea vectorului Oa o perpendiculară pe AB, punctul b se va găsi categoric pe această perpendiculară. Se ştie că viteza punctului B este normală pe O2B deoarece bara O2B are mişcare de rotaţie în jurul articulaţiei O2. Atunci, în planul vitezelor, se va duce o normală la direcţia O2B, prin punctul O. Punctul b se va găsi şi pe această normală, poziţia acestui punct fiind astfel bine determinată, ca rezultat al intersecţiei celor două direcţii normale (vezi figura 4.18). Concluzia este că viteza punctului B va fi dată de vectorul Ob . Punctul C se află la jumătatea barei O2B, iar viteza Cv se regăseşte în poligonul vitezelor sub
forma segmentului Oc , punctul c fiind la jumătatea lui Ob. Stabilirea vitezei punctului D se face prin consideraţii analoage cu cele de la determinarea vitezei punctului B. Astfel, punctul d se va găsi la intersecţia normalei dusă prin c la CD cu normala dusă prin O la O3D. Viteza punctului D va fi dată de vectorul Od (fig. 4.18).
Fig. 4.17.
O3
A
vA
D
B
C
O1 O2
60°
30° 30°
60° 1
(m)
0 2 3
d
O
a
⊥ CD
b
⊥ AB c
⊥ O2B
⊥ O3D
Fig. 4.18

Cinematica A. Vasilescu
150
4.4. VERIFICATI-VĂ CUNOŞTINŢELE 4.4.1. Întrebări de autocontrol
(4.1. Generalităţi)
• Să se prezinte aspectele pe care le presupune studiul cinematic al unui mecanism.
• Cum se numesc corpurile mobile care alcătuiesc un mecanism? Dar cele fixe?
• Care este numele corpului care pune în mişcare mecanismul? • Să se arate ce se înţelege prin mişcare desmodromă a unui mecanism. • Prin ce este caracterizat un centru absolut de rotaţie? • Dacă un element al mecanismului are mişcare de rotaţie, unde se găseşte
centrul absolut de rotaţie al elementului? Dar dacă are mişcare plană? • Într-un mecanism plan, elementele acestuia pot avea una dintre următoarele
mişcări particulare : mişcare de rotaţie, mişcare plană sau mişcare de translaţie. Elementul care are mişcare de translaţie are un centru absolut de rotaţie?
• Să se arate cum este caracterizat un centru instantaneu de rotaţie relativă a două elemente dintr-un mecanism plan.
(4.2. Teoreme de coliniaritate)
• Să se enunţe cele două teoreme de coliniaritate privind centrele de rotaţie ale unui mecanism plan, cu un grad de libertate.
• Prima teoremă poate fi numită "teorema de coliniaritate a centrelor absolute", iar cea de-a doua, "teorema de coliniaritate a centrelor relative". Să se justifice afirmaţia.
(4.3. Studiul distribuţiilor de viteze)
• Să se arate câte tipuri de metode se întâlnesc în studiul distribuţiilor de viteze.
• Reprezentarea distribuţiilor vitezelor punctelor de pe o dreaptă a unui rigid prin metoda proiecţiilor vitezelor cunoaşte trei variante. Să se prezinte acestea.
• Metoda poligonului vitezelor este întâlnită şi sub alte două denumiri : "metoda asemănării" şi respectiv, "metoda planului vitezelor şi a ecuaţiilor vectoriale". Explicaţi.

Cinematica sistemelor de solide rigide Verificaţi-vă cunoştinţele
151
4.4.2. Recapitularea formulelor esenţiale
Gradul de mobilitate la un mecanism plan se calculează : 3 2 0GL c as rsN N N N= − − > unde : cN = numărul de corpuri sau elemente în mişcare ; asN = numărul de articulaţii ; rsN = numărul reazemelor simple. Alte relaţii : .C abs cN N=
2. ( 1) / 2C rel n c cN C N N= = −
unde : .C absN numărul centrelor absolute de rotaţie ;
.C relN numărul centrelor instantanee de rotaţie relativă. Centrele de rotaţie pot fi aranjate într-un tabel. Acesta este util la rezolvarea problemelor (identificarea celor existente, determinarea celorlalte cu teoremele de coliniaritate).
.C absN .C relN (1) (1 2) (1 3) (1 4) . . . (1, n) (2) (2 3) (2 4) . . . (2, n) (3) (3 4) . . . (3, n) . . . . . . . . .
(n-1) (n-1, n) (n)
Prima teoremă de coliniaritate (a centrelor absolute) :
(i), (j), (i, j) A doua teoremă de coliniaritate (a centrelor relative) :
(i, j), (j, k), (i, k)

Cinematica A. Vasilescu
152
4.4.3. Îndrumări pentru rezolvarea problemelor
Se prezintă etapele de parcurs la rezolvarea problemelor pentru care se cere să se aplice metoda diagramelor proiecţiilor vitezelor. Acestă abordare cinematică a distribuţiilor de viteze al unui mecanism este întâlnită în continuare în Mecanica analitică ca fază preliminară la aplicarea principiului lucrului mecanic virtual sau la aplicarea principiului vitezelor virtuale. În continuare, metoda proiecţiilor vitezelor cunoaşte numeroase aplicaţii la disciplina Statica construcţiilor, la abordarea aspectului cinematic în diferite capitole. Aplicarea metodei diagramelor proiecţiilor vitezelor parcurge următoarele etape :
1) Se identifică numărul elementelor (corpurilor mobile) ale sistemului şi se trag concluzii privind gradul de mobilitate al acestuia (se stabileşte numărul gradelor de libertate) 3 2 0GL c as rsN N N N= − − > .
2) Se identifică într-o primă etapă centrele de rotaţie absolute (articulaţii fixe şi centre instantanee de rotaţie), precum şi centrele instantanee de rotaţie relativă (articulaţiile mobile).
3) Se realizează tabloul centrelor de rotaţie (vezi §4.4.2, pag 151) şi se marchează centrele de rotaţie stabilite la punctul anterior.
4) Utilizând cele două teoreme de coliniaritate, se determină restul centrelor de rotaţie, evident nemarcate în tabloul anterior.
5) Pentru poziţia dată a mecanismului, se trasează două linii de referinţă orizontală şi verticală pe care se proiectează centrele de rotaţie absolute (puncte de viteze nule). Centrele instantanee de rotaţie relativă sunt şi ele proiectate pe cele două linii de referinţă, deoarece marcheză punctele de pe două corpuri care au aceiaşi viteză. Faţă de cele două linii de referinţă se vor trasa proiecţiile vitezelor orizontale şi respectiv, verticale.
6) Se trasează diagrama corespunzătoare elementului conducător, apoi a elementului vecin cu care este conectat şi aşa mai departe. Diagramele sunt linii drepte care trec prin centrele absolute şi prin punctele de viteză comună, aflate pe direcţiile proiecţiilor centrelor relative.
7) Verificarea trasării corecte a diagramelor constă în stabilirea ortogonalităţii prelungiriilor diagramelor vitezelor corespunzătoare aceluiaşi corp, din cele două diagrame ale proiecţiilor vitezelor (orizontale şi respectiv, verticale).

Cinematica sistemelor de solide rigide Verificaţi-vă cunoştinţele
153
4.4.4. Probleme rezolvate
PROBLEMA 4.1. Grinda cu zăbrele din figura 4.19 se transformă într-un mecanism cu un grad de libertate prin "suprimarea" tălpii inferioare, notate cu "1". Se cere să se reprezinte diagramele proiecţiilor vitezelor pentru poziţia reprezentată în figura 4.20, ştiind că primul corp este conducător şi are imprimată o viteză unghiulară ω.
REZOLVARE: 1) Se verifică gradul de mobilitate al sistemului cu relaţia 3 2 3 2 2 2 1 1GL c as rsN N N N= − − = ⋅ − ⋅ − = . Avem un mecanism plan cu un grad de libertate : numărul corpurilor (elementelor) este egal cu doi, sunt două atriculaţii (una fixă - legătură exterioară şi una mobilă - legătură interioară) şi un reazem simplu.
2) Se identifică centrul de rotaţie absolut ca fiind articulaţia fixă (1) şi centrul instantaneu de rotaţie relativă ca fiind articulaţia mobilă comună celor două elemente, notată (12) ca în figura 4.21.
3) Se realizează tabloul centrelor de rotaţie (vezi §4.4.2, pag. 151) şi se marchează centrele de rotaţie stabilite la punctul anterior, prin încercuire. Evident, rămâne de stabilit poziţia centrului absolut (2).
4) Poziţia centrului absolut (2) se găseşte pe dreapta (d2), stabilită cu prima teoremă de coliniaritate : se duce dreapta (d2) prin centrul absolut (1) şi centrul relativ (12), deoarece punctele (1), (12) şi (2) sunt coliniare (fig. 4.21). Corpul al
1
2
3
4a
a
Fig. 4.19.
4a
a
Fig. 4.20.
I II
ω
2a
a
2a
(1) (12) (d2) (d'2) (2)
A
ω ω2
Fig. 4.21.
(1) (12)
(2)

Cinematica A. Vasilescu
154
doilea (notat II) are o mişcare plană, şi deoarece prezintă un reazem simplu, pe direcţia de rezemare se duce o dreaptă (d2') pe care se va găsi centrul instantaneu de rotaţie, adică centrul absolut (2). Se observă că mecanismul este antrenat de viteza unghiulară ω care produce celui de-al doilea element o viteză unghiulară ω2 de sens opus.
5) Se proiectează centrele de rotaţie absolute şi relative pe două linii de referinţă, orizontală şi verticală (fig. 4.22).
6) În sensul de rotaţie al vitezei unghiulare ω se construieşte diagrama corpului I, diagramă care trece prin punctul de proiecţie al centrului absolut (1) pe linia de referinţă orizontală (punct de viteză nulă). Diagrama corpului I, se reprezintă cu o linie continuă numai pe zona în care corpul se proiectează pe orizontală, între centrul absolut (1) şi cel relativ (12). Între linia de referinţă orizontală şi limita din dreapta a diagramei corpului I se găseşte viteza în centrul relativ (12) proiectată pe verticală ( 12 yv ). Se construieşte diagrama corpului II ducând o linie prin punctul de viteză nulă (proiecţia punctului (2)) şi prin vârful vitezei 12 yv . Se repetă procedeul de trasare a celor două diagrame de această dată, faţă de linia de referinţă verticală. Viteza unghiulară ω2 se calculează scriind expresia proiecţiei vitezei din centrul relativ (12), atât pentru elementul din stânga I, cât şi pentru cel din dreapta II :
12 22 2yv a aω ω= ⋅ = ⋅ Rezultă că cele dpuă corpuri au aceiaşi viteză unghiulară ca mărime, dar sensurile sunt opuse. 7) Ortogonalitatea prelungirilor celor două diagrame este evidentă (fig. 4.22).
2a
a
2a
(1) (12) (d2) (d'2) (2) (1) (2)
(1)
v12y
A
I II
I II
(2) vAy
ω
ω ω2
vAx
ω2
Fig. 4.22.

Cinematica sistemelor de solide rigide Verificaţi-vă cunoştinţele
155
8) Din cele două diagrame se pot stabili proiecţiile vitezei oricărui punct din mecanism. Cu aceste proiecţii se află viteza punctului respectiv. Se exemplifică considerând punctul A în figura 4.22. Mai întâi, proiecţiile vitezei sunt translatate în punctul A şi apoi se găseşte Av prin compunerea celor două
componente. Se constată că Av şi vectorul de poziţie (2)A sunt doi vectori ortogonali, iar sensul vitezei Av corespunde sensului rotaţiei instantanee a elementului II. Numeric se stabileşte mărimea fiecărei proiecţii din cele două diagrame :
2Axv a aω ω= ⋅ = ⋅ , iar 2Ayv a aω ω= ⋅ = ⋅ . Mărimea vitezei rezultă : 2 2 2A Ax Ayv v v a ω= + = ⋅ .
PROBLEMA 4.2. Grinda cu zăbrele din figura 4.19 se transformă într-un mecanism cu un grad de libertate prin "suprimarea" tălpii superioare, notate cu "2". Se cere să se reprezinte diagramele proiecţiilor vitezelor pentru poziţia reprezentată în figura 4.23, ştiind că primul corp este conducător şi are imprimată o viteză unghiulară ω.
REZOLVARE: Problema este similară celei anterioare 4.1, cu deosebirea că articulaţia comună celor două elemente este plasată la partea inferioară. Se parcurg aceleaşi etape, rezultatele acestora sunt sintetizate în figura 4.24.
4a
a
Fig. 4.23.
I II ω
2a
a
2a
(1)
(12)
(d2)
(d'2)
(2)
(1)
(2)
(1)
v12y I II
I II
(2)
ω
ω ω2
v12x
ω2
a
Fig. 4.24.

Cinematica A. Vasilescu
156
PROBLEMA 4.3. Grinda cu zăbrele din figura 4.19 se transformă într-un mecanism cu un grad de libertate prin "suprimarea" montantului, notat cu "3". Se cere să se reprezinte diagramele proiecţiilor
vitezelor pentru poziţia reprezentată în figura 4.25, ştiind că primul corp este conducător şi are imprimată o viteză unghiulară ω.
REZOLVARE: 1) Sistemul este alcătuit din patru elemente, astfel că se verifică numărul gradelor de libertate cu relaţia :
3 2 3 4 2 5 1 1GL c as rsN N N N= − − = ⋅ − ⋅ − = Se constată că de fapt sunt două elemente I şi II (o placă de forma unui paralelogram şi a doua de forma unui trapez) care sunt interconectate cu doi pendului paraleli, elementele III şi IV.
2) Se identifică imediat centrul absolut (1), precum şi centrele relative (13), (23), (14), (24). Pe direcţia reazemului simplu se duce dreapta (d'2) pe care se va găsi centrul absolut (2).
3) Tabloul centrelor de rotaţie pentru cele patru elemente, scoate în evidenţă centrele de rotaţie care au rămas de aflat (fig. 4.27). 4) Astfel centrul relativ (12) se stabileşte aplicând a doua teoremă de coliniaritate, scrisă de două ori : mai întâi pentru elementele I, II şi III, apoi pentru elementele I, II şi IV. Centrul (12) se găseşte la intersecţia a două drepte : prima dreaptă se duce prin centrele relative
4a
a
Fig. 4.25.
I
II ω
IV
III
a 2a
a
(1) (13) (d2)
(d'2) (2)
ω ω2
Fig. 4.26. a
(14)
(23)
(24)
(12) ∞
(12) (1)
(2)
(13) (14)
(23)
(34)
(24)
(3) (4)
Fig. 4.27.

Cinematica sistemelor de solide rigide Verificaţi-vă cunoştinţele
157
(13) şi (23), iar a doua dreeaptă prin centrele relative (14) şi (24). Cele două drepte sunt orizontale şi deci paralele, ceea ce înseamnă că (12) poate fi considerat plasat la infinit (fig.4.26). Acest raţionament poate fi sintetizat în următoarea scriere simbolică :
(12)2: (13) colin. (23) (12)
2: (14) colin. (24) (12)
TT
⇒ ⇒ ∞
Concluzia practică este aceea că dacă centrul (12) este plasat la infinit, atunci diagramele distribuţiilor de viteze de pe cele două corpuri (1) şi (2) sunt paralele, corpurile având aceiaşi viteză unghiulară, atât ca mărime, cât şi ca sens : 1 2ω ω ω= = . Centrul absolut (2) poate fi determinat la intersecţia direcţiei reazemului simplu cu direcţia dreptei (d2) trasată prin (1) şi (12), conform primei teoremei de coliniaritate scrisă pentru corpurile I şi II (fig. 4.26). Se poate scrie deci :
2
2
1 : (1) colin. (12) ( )(2)
: ( ' )T d
d⇒
→ ⇒
Numai cu aceste informaţii este posibilă realizarea diagramelor distribuţiilor de viteze pentru cele patru elemente, chiar dacă nu au fost determinate centrele (34), (3) şi (4). Ca un exerciţiu, se trece totuşi la aflarea poziţiei celorlalte centre. Centrul relativ (34) se stabileşte ca poziţie, aplicând a doua teoremă de coliniaritate a centrelor de rotaţie de două ori : mai întâi pentru elementele I, III, IV, iar apoi pentru elementele II, III, IV.
(34)2: (13) colin. (14) (34)
2: (23) colin. (24) (34)
TT
⇒ ⇒ ∞
După cum se observă în figura (4.28), centrul relativ (34) se poate considera plasat la infinit, pe o direcţie paralelă cu cea de-a doua bisectoare, iar diagramele elementelor trei şi patru vor avea direcţii paralele. Centrul absolut (4) se stabileşte aplicând prima teoremă de coliniaritate de două ori : pentru elementele I, IV şi II, IV.
∞
a 2a
a
(1) (13) (d4) (d'4) (2)
ω ω2
Fig. 4.28.
a
(34) (23)
(4)
(12) ∞
(14) (24)
(3)
y4 = a/3
(d3)
(d'3)
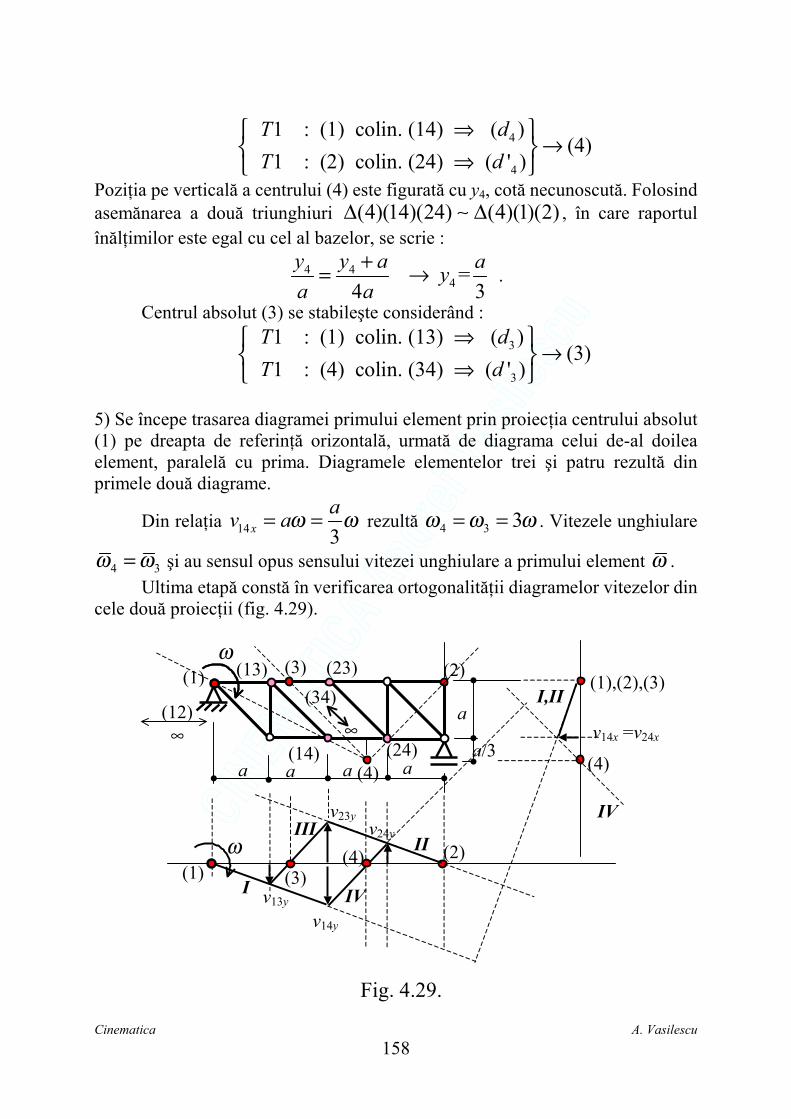
Cinematica A. Vasilescu
158
4
4
1 : (1) colin. (14) ( )(4)
1 : (2) colin. (24) ( ' )T dT d
⇒ → ⇒
Poziţia pe verticală a centrului (4) este figurată cu y4, cotă necunoscută. Folosind asemănarea a două triunghiuri (4)(14)(24) (4)(1)(2)∆ ∆ , în care raportul înălţimilor este egal cu cel al bazelor, se scrie :
4 44 =
4 3y y a aya a
+= → .
Centrul absolut (3) se stabileşte considerând :
3
3
1 : (1) colin. (13) ( )(3)
1 : (4) colin. (34) ( ' )T dT d
⇒ → ⇒
5) Se începe trasarea diagramei primului element prin proiecţia centrului absolut (1) pe dreapta de referinţă orizontală, urmată de diagrama celui de-al doilea element, paralelă cu prima. Diagramele elementelor trei şi patru rezultă din primele două diagrame.
Din relaţia 14 3xav aω ω= = rezultă 4 3 3ω ω ω= = . Vitezele unghiulare
4 3ω ω= şi au sensul opus sensului vitezei unghiulare a primului element ω . Ultima etapă constă în verificarea ortogonalităţii diagramelor vitezelor din cele două proiecţii (fig. 4.29).
(14)
(13)
∞
a a
a
(1) (2) ω
Fig. 4.29.
a
(34) (23)
(4) (24)
(3)
a/3
(12) ∞
a
ω
I
II III
IV
I,II
(1)
(1),(2),(3)
(4)
(4) (2)
v14x =v24x
IV
v14y
v24y
(3) v13y
v23y

Cinematica A. Vasilescu
159
AAnneexxaa AA
INDICAŢII GENERALE PENTRU REZOLVAREA PROBLEMELOR LA EXAMEN
1) De obicei, pentru examen sunt prevăzute mai multe probleme. Este oportun ca fiecare dintre acestea să fie rezolvată pe foi diferite. 2) Se începe cu problema care pare cea mai puţin dificilă. 3) Înainte de a le aplica, se scriu enunţurile teoremelor utilizate. 4) Se fac desene sau scheme clare cuprinzând toţi vectorii utilizaţi în demonstraţii. 5) Se redactează răspunsurile cu grijă şi claritate (sintaxă, ortografie). Ţinând cont de complexitatea aplicaţiilor numerice, de regulă este permisă utilizarea unui calculator. Cunoaşterea şi utilizarea corectă a tuturor funcţiilor este obligatorie. Erorile cele mai frecvente sunt produse la utilizarea funcţiilor trigonometrice. Înainte de rezolvarea unei probleme, se începe cu citirea enunţului problemei cu atenţie, de mai multe ori.
Analiza datelor şi înţelegerea fenomenului sunt urmate de o sinteză care conduce la stabilirea unei strategii de rezolvare, adică : aplicarea unei teoreme, folosirea unor relaţii, formule sau proprietăţi specifice, etc. Rezolvarea propriu-zisă constă în utilizarea unui model matematic adecvat strategiei adoptate. De multe ori, aceiaşi problemă se poate rezolva pe mai multe căi, rezolvitorul alegând-o pe aceea pentru care aparatul matematic îi este mai familiar. De exemplu, pentru aflarea bazei şi rostogolitoarei la mişcarea plană a rigidului, se poate alege între : - rezolvarea pur geometrică (aflarea locului geometric al centrului
instantaneu de rotaţie); - utilizarea formulelor care dau ecuaţiile parametrice ale celor două
centroide (metoda analitică), apoi tratarea problemei directe de cinematică de punct, punctul în cauză fiind centrul instantaneu de rotaţie;
- stabilirea poziţiei centrului instantaneu de rotaţie prin aplicarea unor relaţii din geometria plană şi trigonometrie, urmată de rezolvarea problemei directe de cinematica punctului pentru stabilirea traiectoriei centrului instantaneu de rotaţie în cele două sisteme de referinţă, fix şi respectiv, mobil.
Verificarea rezultatelor din punctul de vedere al omogenităţii relaţiilor obţinute şi al dimensiunilor este obligatorie. Ultima etapă o reprezintă interpretarea rezultatelor cu referire directă la cerinţele din enunţul problemei.

Cinematica A. Vasilescu 160
AAnneexxaa BB
DERIVATELE UNOR FUNCŢII VECTORIALE Definiţia unei derivate aplicate unei funcţii vectoriale ( )P u , în raport cu scalarul u este dată de ecuaţia (B.1) :
0 0
( ) ( )lim limu u
dP P P u u P udu u u∆ → ∆ →
∆ + ∆ −= =∆ ∆
(B.1)
Dacă ( ) x y zP u P i P j P k= + + , atunci
yx zdPdP dPdP i j kdu du du du
= + + (B.2)
Se consideră în continuare derivatele aplicate unor operaţii elementare vectoriale : compunerea a doi vectori, produsul unui scalar cu un vector, produsul scalar şi produsul vectorial a doi vectori.
( )d P Q dP dQdu du du
+ = + (B.3)
( )d fP df dPP fdu du du
= + (B.4)
( )d P Q dP dQQ Pdu du du
= + (B.5)
( )d P Q dP dQQ Pdu du du
× = × + × (B.6)

Anexa C Locuri geometrice în cinematică 161
AAnneexxaa CC LOCURI GEOMETRICE ÎN CINEMATICĂ
C.1. UNELE LOCURI GEOMETRICE ELEMENTARE
1. Locul geometric al punctelor egal depărtate de două puncte fixe este
mediatoarea segmentului determinat de cele două puncte. 2. Locul geometric al punctelor egal depărtate de o dreaptă dată este perechea
de drepte paralele cu dreapta dată la distanţă egală de o parte şi de alta a acesteia.
3. Locul geometric al punctelor din plan care se găsesc la o distanţă dată de un punct fix este cercul cu centrul în punctul fix şi cu raza distanţa dată.
4. Locul geometric al punctelor din care un segment de dreaptă se vede sub un unghi drept este cercul care are segmentul respectiv drept diametru.
5. Locul geometric al punctelor din care un segment de dreaptă se vede sub un unghi dat este reprezentat de două arce de cerc care au aceleaşi extremităţi ca şi segmentul şi sunt simetrice faţă de dreapta pe care este situat segmentul.
6. Locul geometric al punctelor egal depărtate de un punct fix (numit focar) şi de o dreaptă fixă (numită directoare) este o parabolă.
7. Locul geometric al punctelor ce au proprietatea că suma distanţelor la două puncte fixe (numite focare) este constantă este o elipsă.
8. Locul geometric al punctelor ce au proprietatea că modulul diferenţei distanţelor la două puncte fixe (numite focare) este constantă este o hiperbolă.
Observaţie Soluţionarea unor probleme de cinematică se bazează pe intersecţia a două locuri geometrice elementare. Aplicaţia C.1. Două roţi dinţate cu razele cunoscute R şi r antrenează o cremalieră C într-o mişcare de translaţie. Se pune problema stabilirii poziţiei centrului O2 al roţii cu raza r, dacă se cunoaşte distanţa d de la centrul O1 al roţii cu raza R la cremalieră. Răspuns : Centrul O2 se găseşte la distanţa r de cremaliera C (loc geom. 2) şi la distanţa R+r de centrul O1 (loc geom. 3). Astfel, O1 se va găsi pe paralela C' dusă la C la distanţa r cât şi pe cercul cu centrul în O1 şi cu raza R+r. Din figură se constată că există două puncte O2 şi O2' care satisfac aceste condiţii (fig. C.1).
C
O1
C'
R
O2 O2' r
d r
Fig. C.1.

Cinematica A. Vasilescu 162
C.2. BAZA ŞI ROSTOGOLITOAREA CA LOCURI GEOMETRICE ELEMENTARE
Centroida fixă (baza) şi respectiv centroida mobilă (rostogolitoarea) sunt definite ca locuri geometrice, pe care le descriu centrul instantaneu de rotaţie faţă de reperul fix şi respectiv, faţă de reperul mobil. În capitolul 2 (cinematica solidului rigid) problemele au fost rezolvate şi altfel decât cu metoda pur geometrică ("loc geometric"), dar este recunoscut că soluţiile geometrice oferă cele mai elegante soluţii. În continuare sunt prezentate rezolvările la câteva aplicaţii propuse frecvent pentru rezolvare în culegerile de probleme de mecanică. Aplicaţiile sunt grupate după tipurile de soluţii obţinute. a) Baza - dreaptă şi rostogolitoarea - cerc Aplicaţia 2.4 (pag.80) prezintă mişcarea plană a unui disc care se rostogoleşte pe o dreaptă. Sunt considerate trei variante : rostogolire fără alunecare (fig. 2.21), discul alunecă în sensul deplasării centrului său şi discul alunecă în sens opus deplasării centrului său (fig. 2.22).
b) Baza şi rostogolitoarea - cercuri O astfel de soluţie a fost găsită la problema 2.3 de la pagina 100 (fig. 2.36) şi la problema 2.6 de la pagina 110 (fig. 2.48).
Aplicaţia C.2. Să se stabilească baza şi rostogolitoarea pentru mişcarea plană a barei AB din mecanismul bielă manivelă (O1A = AB = l) din figura C.2. Elementul conducător este manivela O1A. Răspuns : Se stabileşte poziţia centrului instantaneu de rotaţie (I) pentru o poziţie oarecare dată de unghiul θ pe care îl formează laturile egale ale triunghiului isoscel O1AB cu baza O1B. Se cunosc direcţiile vitezelor în punctele
A şi B : 1Av O A⊥ (bara O1A are
mişcare de rotaţie) şi 1Bv O B (punctul B are mişcare rectilinie). Astfel se prelungeşte latura O1A şi la intersecţia cu perpendiculara ridicată pe O1B se găseşte punctul I (fig. C.3). Din analiza figurii se observă că triunghiul dreptunghic O1BI are segmentul AB ca mediană a ipotenuzei şi deci AI = l.
l l O1 B
Fig. C.2.
ωωωω A
l l
l x y
I(CIR)
A
B ≡ O x1
y1
O1
Fig. C.3.
θ θ
2θ β
β
(B ) (R )

Anexa C Locuri geometrice în cinematică 163
Rezultă mai întâi că punctul I se află la distanţa constantă O1I = 2l faţă de punctul fix O1, adică baza (B ) este cercul cu centrul în O1 şi cu raza 2l. În al doilea rând, centrul instantaneu de rotaţie se situează la distanţa constantă IA = l faţă de punctul A ataşat sistemului solidar barei AB. Ca urmare, rostogolitoarea (R ) este cercul cu centrul în punctul A, având raza l. c) Baza şi rostogolitoarea - parabole Aplicaţia C.3. Să se stabilească baza şi rostogolitoarea pentru mişcarea plană a unei plăci pătrate ABCD cu latura l, ştiind că vârful A se deplasează cu viteza constantă Av pe verticala AO1, iar latura BC trece permanent printr-un punct fix E, situat pe orizontala O1E, unde O1E = l (fig. C.4). Răspuns : Se alege sistemul de referinţă fix x1O1y1, având originea în O1, ca axe orizontala O1E şi verticala O1A. Sistemul de referinţă solidar plăcii xOy se alege cu originea în vârful B şi cu axele în lungul laturilor BC şi BA (fig. C.4). Se cunosc direcţiile a două viteze : punctul A descrie verticala O1A, iar viteza punctului E de pe placa pătrată este dirijată în lungul laturii BC. Centrul instantaneu de rotaţie se află la intersecţia perpendicularelor ridicate în A şi E pe direcţiile celor două viteze Av şi Ev . Din analiza figurii, se stabileşte că patrulaterul AO1BE este un trapez isoscel deoarece diagonalele sunt egale (O1E = AB = l), iar unghiurile adiacente sunt şi ele egale, având ca măsură unghiul θ. În continuare se observă că triunghiul IAE este isoscel (IA = IE) având unghiurile de la bază egale. Egalitatea laturilor triunghiului isoscel IA = IE conduce la următorele observaţii :
θ
l
A
E
C O1
y1
x1
D
I
Fig. C.5.
θ B
V1
(BBBB )
l
A
E
C
O1
D
I
Fig. C.6.
V1 (RRRR )
O=B
x
y
V
(BBBB )
θ
l
A
O=B E
C O1
y1
x1
D I
vA x
y
Fig. C.4.
ω
θ
vE

Cinematica A. Vasilescu 164
a) în raport cu sistemul de referinţă fix, I se află la aceiaşi distanţă de punctul fix E (focar) şi de dreapta verticală O1A (directoare). Atunci când placa se roteşte, punctul I descrie o parabolă (baza) cu vârful V1 la jumătatea distanţei între O1 şi E şi cu axa de simetrie în lungul axei O1x1 (fig. C.5) ; b) în raport cu sistemul de referinţă mobil (solidar plăcii), I se află la aceiaşi distanţă de latura BC (directoare) şi de vârful A care este un punct fix în sistemul solidar plăcii (A este prin urmare focar). Prin urmare, I descrie o parabolă (rostogolitoarea) cu vârful V la jumătatea distanţei dintre A şi B. Parabola are axa de simetrie axa Oy (fig. C.6). Baza şi rostogolitoarea sunt două parabole identice (au acelaşi semiparametru p = l, adică aceiaşi distanţă dintre vârf şi directoare) şi ele sunt tangente în centrul instantaneu de rotaţie I (fig. C.6). Aplicaţia C.4. O bară rectilinie AB se mişcă într-un plan deplasându-se cu capătul A pe o dreaptă orizontală (∆) cu o viteză constantă Ov , în timp ce bara sprijină cu corpul ei pe un cerc fix, în punctul T. Ştiind că cercul fix are raza R şi este tangent la dreapta (∆), să se stabilească centroidele mişcării plan-paralele a barei. Răspuns : Centrul instantaneu de rotaţie I se află la intersecţia perpendicularelor ridicate în A şi T pe direcţiile vitezelor Ov şi respectiv Tv . Se observă că atât bara cât şi dreapta orizontală (∆) sunt tangente la cerc şi atunci există egalitatea AO1 = AT. Triunghiurile dreptunghice ICE şi IAT sunt congruente (CE = AT, şi unghiurile adiacente sunt egale fiind formate de laturi
reciproc ortogonale, având ca măsură unghiul θ. Rezultă egalitatea ipotenuzelor celor două triunghiuri : IC = IA. Această egalitate este folosită la aflarea celor două centroide astfel : în raport cu sistemul de referinţă fix, I se situează la aceiaşi distanţă faţă de punctul fix C (focar) şi faţă de orizontala (∆) care este directoare. Deci baza este parabola cu axă de simetrie verticala prin punctul C şi cu vârful V1 la distanţa V1C = R/2 (fig. C.7).
D
Fig. C.7.
vO
θ
x1
I
θ
A
B
(BBBB )
O1
(RRRR )
C
T
y1
E
(∆')
x
V
V1
(∆)
y
ω

Anexa C Locuri geometrice în cinematică 165
Sistemul de referinţă mobil (solidar barei) are originea în capătul A al barei, axa Ox normală pe axa barei şi axa Oy în lungul barei (fig. C.7). În raport cu acest sistem de referinţă, egalitatea IC = IA capătă următoarea interpretare : punctul A este un punct fix (focar), iar dreapta (∆') paralelă cu bara AB şi care trece prin centrul cercului C este mereu la distanţa R, deci are o poziţie fixă, relativ la sistemul de referinţă solidar barei. Această dreaptă are rolul de directoare pentru parabola pe care o descrie punctul I (rostogolitoarea), atunci când bara se mişcă. Această parabolă are ca axă de simetrie axa Ox şi vârful în punctul V aflat la distanţa VA = R/2 de focarul A (fig. C.7). d) Baza şi rostogolitoarea - elipse Aplicaţia C.5. Un antiparalelogram este alcătuit din două manivele AB şi CD cu lungimi egale cu l şi de o bară BD articulată cu manivelele. Distanţa dintre articulaţiile fixe A şi C este egală cu lungimea barei BD = 2e (l > 2e). Se cere să se găsească locul geometric al centrului instantaneu de rotaţie I în raport cu cele două sisteme de referinţă fix şi mobil - solidar barei (fig. C.8). Răspuns : Centrul instantaneu de rotaţie I se află la intersecţia barelor AB şi CD, deoarece se duc perpendiculare pe vitezele capetelor barei din B şi C (fig. C.8). Triunghiurile ADC şi ABC sunt congruente conform cazului pentru care cele trei laturi sunt respectiv egale : AB = CD = l, AC = BD = 2e, iar AC este latură comună. Rezultă că unghiurile notate α pe figură sunt egale şi deci triunghiul AIC este isoscel, cu laturile egale IA = IC. Analog se demonstrează că triunghiul BID este isoscel şi prin urmare, triunghiurile IAD şi ICB sunt congruente. O proprietate remarcabilă pentru problema de faţă o reprezintă faptul că suma laturilor care pornesc din vârful I este egală cu l. Astfel, se poate scrie că AI +ID = IC +ID = l, ceea ce înseamnă că locul geometric al punctului I în raport cu sistemul de referinţă fix este elipsa cu focarele în A şi D, având excentricitatea liniară e (baza), iar faţă de sistemul solidar barei xOy, este o elipsă congruentă cu prima, cu focarele în B şi C (rostogolitoarea) (fig. C.8). Observaţie. Dacă l < 2e, atunci baza şi rostogolitoarea sunt două hiperbole congruente având focarele în cele două articulaţii fixe şi respectiv mobile.
α
Fig. C.8.
I
A x1 D
vC
vB
ω
y1
O1
e e
x
O y
B
C
α