mechanobiology and morphogenesis in living matter: a survey
TRANSCRIPT

MOX-Report No. 08/2017
Mechanobiology and morphogenesis in living matter: asurvey
Ambrosi, D.; Beloussov, L.V.; Ciarletta, P.
MOX, Dipartimento di Matematica Politecnico di Milano, Via Bonardi 9 - 20133 Milano (Italy)
[email protected] http://mox.polimi.it

Noname manuscript No.(will be inserted by the editor)
Mechanobiology and morphogenesis in living matter: a survey
D. Ambrosi · L.V. Beloussov · P. Ciarletta
Received: date / Accepted: date
Abstract Morphogenesis in living tissues is the para-mount example of a time- and space-dependent orches-tration of living matter where shape and order emergefrom undifferentiated initial conditions. The genes en-code the protein expression that eventually drives theemergence of the phenotype, while energy supply andcell-to-cell communication mechanisms are necessary tosuch a process. The overall control of the system likelyexploits the laws of chemistry and physics through ro-bust and universal processes. Even if the identificationof the communication mechanisms is a question of fun-damental nature, a long-standing investigation settledin the realm of chemical factors only (also known asmorphogens) faces a number of apparently unsolvablequestions. In this paper, we investigate at what ex-tent mechanical forces, alone or through their biologicalfeedbacks, can direct some basic aspects of morphogen-esis in development biology. In this branch of mechano-biology, we discuss the typical rheological regimes ofsoft living matter and the related forces, providing asurvey on how local mechanical feedbacks can controlglobal size or even gene expression. We finally highlightthe pivotal role of nonlinear mechanics to explain theemergence of complex shapes in living matter.
Keywords Morphogenesis · Developmental biology ·Mechanobiology · Elasticity
D. Ambrosi and P. CiarlettaMox, Dipartimento di Matematica, Politecnico di Milano, Mi-lan, Italy.E-mail: [email protected];[email protected]
L.V. BeloussovLaboratory of Developmental Biophysics, Department of Em-bryology, Moscow State University, Moscow 119899, RussiaE-mail: [email protected]
PACS 87.17.Pq · 87.10.Pq
Mathematics Subject Classification (2000) 92C10 ·92C15
1 Introduction
Imagine that you trace by an unbiased eye in time-lapse regime the development of any embryo. First ofall, you will notice a plethora of extensive deforma-tions and mutual shifts of its constituent parts, startingfrom large groups of cells up to so-called supramolec-ular structures, all of them together covering roughlythe 10−3 − 10−6 m dimensional range. So far as anymotion and deformation require mechanical forces, it isbut natural to ascribe all these processes to the realm ofmechanics and to conclude hence that the latter shouldlie in a very heart of embryology. However along cen-turies such a conclusion has been shared only by fewoutstanding scientists, such as His [51] and Thompson[88], although they were qualified as marginal by themainstream community. The dominating view was thatalthough the developmental importance of mechanicalevents can not be rejected in any case, these obser-vations were no more than epiphenomenae (blind endresults) of more deeply hidden controlling agents. Atlower scales, they have nothing to do with mechanicsbut should be treated instead in terms of classical chem-istry, such as a finely regulated production and diffusionof specific macromolecules.This approach, even if promoted a number of importantdiscoveries (mostly centered around the action of the socalled embryonic inductors), has led to almost disregardseveral fundamental aspects of development. To thesebelongs, first of all, the entire problem of shapes for-mation (morphogenesis) including its holistic control,

2 D. Ambrosi et al.
vividly expressed by a miraculous capacity of eggs andembryos to produce normally structured organisms ofdifferent dimensions from their isolated parts or ran-domly mixed cells (so called “embryonic scaling”). Evenmost refined self-organization models, if based exclu-sively on such chemical notions as synthesis, inhibitionand diffusion of some specific substances [70], cannot in-terpret these properties without additional ad hoc intro-duced assumptions. It is the proper time to ask whetherthe mechanics can be here of any help by suggestingsome new feedback contours able to control morpho-genesis.The first section of this work is a critical review of recentdiscoveries in developmental biology: the importance ofphysical loads in the emergence of a macroscopic shapeis highlighted from local mechano-transduction mech-anisms at the cellular level. In the second section, weillustrate the conceptual difficulties that characterizethe identification of the mechanisms of size control inembryogenesis. Even in simple system models, a me-chanical feedback on the reaction-diffusion dynamics ofmorphogens seems to cooperate to provide a local con-trol of global size and some arguments even support thehypothesis that stress itself conveys information on size.Finally, we review the theoretical bases of the mechan-ical modelling of morphogenesis and mechano-biology,highlighting not only the pivotal role of nonlinear me-chanics for proving novel biological insights but also themany original advances in mechanical modeling trig-gered by biological questions.
2 The role of mechanics in developmentalbiology
2.1 Mechanical control of morphogenesis
The first unambiguous experimental demonstration ofa mechanical control of morphogenesis-like events wasgiven by Harris et al. [49]. The authors seeded fibrob-lasts onto a silicon substrate, whose compliance allowedthe crawling cells to provoke a deformation along dis-tances much exceeding the individual cells diameters.Under these conditions the cells, instead of spreadinghomogeneously along the entire substrate (as they didwhen cultivated onto a rigid surface) created a latticeconsisting of regularly arranged clusters connected bythin files of extensively elongated cells. That means thatcells were self-organized into definite patterns with new(not existing beforehand) characteristic linear dimen-sions of inter-cluster distances. To describe mathemati-cally these results, the authors borrowed from chemoki-netic models the idea of short-range activation and long-range inhibition but decoupled it from a chemical con-
text. Rather, they linked the short-range activation withincrease of cell-cell contact areas and long-range inhi-bition with cells-generated tensions stretching the sub-strate and preventing thus further enlargement of cellclusters. As a result, non-observable scalar values havebeen replaced by directly observed tensorial ones (de-formations of cells and tensions of a substrate). Thisopened the way for modeling realistic three-dimensionalshapes instead of their hypothetical chemical counter-parts. For applying the same approach to entire em-bryos, the first thing to explore was whether their tis-sues were mechanically stressed and if yes, whether thestresses were of developmental importance. This workwas started on amphibian embryos by Moscow Univer-sity group (transformed later in the lab of Develop-mental Biophysics) in the seventies [12]. The stresseswere detected by the emergence of rapid (t < 1s) tis-sue deformations (Fig. 1A, B) after strictly localizedincisions performed under close to 0 C temperatures.This procedure avoids the development of an active cel-lular response after a certain lag period, keeping onlyquasi-elastic relaxations to highlight the presence ofpre-existing stresses.
As a result, stage-specific tensile patterns have beenrevealed consisting of three main elements: surface ar-eas stretched in regular directions and as a rule in thegradient fashion; files of tensed cells transpiercing em-bryonic bodies; tension nodules which join these twocomponents [11]. The patterns remained topologicallyinvariable during rather prolonged time periods, drasti-cally changing in between. The changes were associatedwith morphogenetic movements which produced tissuedeformations remarkably similar to the rapid post-incisionones, although if proceeding several time orders slower.Therefore, one may conclude that normal morphogene-sis is going on in a much retarded rate along a relaxationpathway. Based upon these observations, a model of ep-ithelial morphogenesis has been proposed [10] which,similar to most other models implied short-range acti-vation and long-range inhibition. However, the activa-tion was identified with a relay-like enlargement of cell-cell contact areas while the inhibition with the increaseof tangential tensions caused just by this relay if thelayers edges were fixed. The unique advantage of thismodel was in representing the above mentioned phe-nomenon of embryonic scaling without any additionalassumptions.
2.2 Mechanical feedbacks and size effects
The next step was focused on exploring whether andin what way the relaxation and reorientation of themain tensions affects development. A simple method

Mechanobiology and morphogenesis in living matter: a survey 3
Fig. 1 Two examples of rapid (t < 1s) deformations fol-lowing tissue incisions (wedges) of Rana temporaria tissuesfrom late gastrula embryos. A: separated tissue of the outer(dark) and inner layers of neuroectoderm undergo same bend-ing as intact tissues during neurulation. B: bending of in-cised parts of gastrocoel roof closely imitates normal mor-phogenetic movements during notochord formation. From [14,16].
for relaxing tangential tensions on the embryonic sur-face was to insert a wedge of homologous tissue in thevegetal hemisphere of a blastula or early gastrula stageembryo (Fig.2A,D, pointers; see for details [13]). Whenperformed during the blastula stage, such operation ledto formation of abnormal protuberances (Fig.2B) andto a complete distortion of further development (Fig.2C). If made on the early gastrula stage, similar relax-ation led to abnormal extension and multiplication ofthe axial organs (Fig. 2E). Even if nothing more thana small region corresponding to the dorsal blastoporallip was relaxed (outlined by bracket, Fig. 2F) the ax-ial organs arrangement was completely disordered (Fig.2G) and, most surprisingly, the entire shape of embry-onic body largely deviated from amphibian phenotypetowards that typical for Amniota embryos (Fig.2, cf Fand H) [56]. This makes it plausible that, besides beinga source of diffusible inductors, the dorsal blastoporallip plays also a role of a main tensions nodule, control-ling the entire body morphology.
Fig. 2 Loss of morphological order and formation of abnor-mal phenotype as a result of experimental relaxation of ten-sile stresses on the surface of Xenopus laevis embryos. Fordetailed comments see text. A, B: wedge of a ventral tissue(pointers) inserted in a blastula stage embryo for relaxing sur-rounding tissues, 1h after operation. B, C, E: operated em-bryos, 48h after insertion. Note abnormal protuberances in Band a complete loss of order in C, E. F and G correspondingly:completely abnormal phenotype and chaotic arrangement ofaxial organs after a local relaxation of tensions on the dorsallip surface of early gastrula Xenopus embryos (relaxed areais marked by brackets in F). H: text-book image of so-calledpharyngula embryo similar to F but absent in normally de-veloping amphibians and specific for other taxonomic group[13,56].
On the other hand, stretching by an external forceinduces or at least reorients a universal type of morpho-genetic cell movements, so called “convergence–extension”,which elongates embryonic body by shifting its cellsin convergent directions towards the elongation axis.A body of amphibian embryos consists of two partsso called suprablastoporal area (SBA) which displaysautonomous convergence–extension elongating body inantero-posterior direction, and the ventral area (VA),normally incapable to these movements. It has been ob-served that within VA the convergence–extension move-ments could be initiated de novo by arbitrary orientedexternal force (Fig. 3B-D, cf A) and within SBA theycould be reoriented perpendicularly to the normal ones(Fig. 3E-G) [15,90]. In the both cases most of explantstook dumb-bell shapes (Fig.3B, D, G) and revealed ex-tensive cell redistributions, pointing to active convergence–extension in the direction of applied force. This meansthat after the application of an external stretching forceto a sample of embryonic tissue, its cells become rear-ranged in such a way that the sample becomes actively

4 D. Ambrosi et al.
Fig. 3 Active response to external stretching in different ex-plants of Xenopus embryonic tissues. A-D: ventral area, E-G:suprablastoporal area (SBA). A is non-stretched explant. B-D: explants stretched by outside applied forces produce vari-ous bulges, indicating generation of the active pressure forceswhich coincide with direction of stretch. E: a piece of SBAtissue before stretching; F: same piece immediately after theend of transverse stretching (which was oriented perpendic-ularly to normal elongation direction) ; G: same tissue pieceafter 3h incubation in a stretched state. Again, a dumb-bellshape indicates the action of a newly generated pressure force.From [15], and courtesy of A. Mansurov.
elongated in stretch direction, producing a certain pres-sure just in the direction of a previous stretching.
Another way to redistribute tensions was to bendforcibly tissue pieces, stretching thus their convex sur-faces and compressing the concave ones. After stoppingdeformations, progressive deepening of just slightly out-lined invaginations could be observed on the concavesides (Fig. 4 cf A, B and C, D; see for details [57,59]).Common to all the above described reactions was thetendency not only to restore stress values perturbedduring experimental interventions but to do it withcertain overshoots. Indeed, as shown by morphomet-ric measurements, the relaxation of tensions or slightcompression triggered cells tangential contractions andendocytotic engulfment of cell membrane to the amountenough for hyper-restoring the initial tensions [56,57,59,11]. Similarly, as shown in Fig. 3, the external stretch-ing, by inducing cells convergence-extension, hyper-res-tores the initial state of a moderate tension by pro-ducing internal pressure, and thus reversing the signof stresses. Examples of such reactions are numerous(reviewed in [11]). Within the tissues in which cells areclose to immobile, the main tool for hyper-relaxing pre-viously imposed tensions seem to be their mitotic di-visions predominantly oriented along the axes of cellstretching [48].
Similar reactions, seemingly directed towards activehyper-restoration of the initial stress patterns, are tak-ing place not only in time but also in space. Thus, inmany cases tensile patterns are arranged within em-bryonic tissues in a gradient-like fashion. In order tokeep the mechanical equilibrium, the cross-sections of
Fig. 4 The active increase of slightly imposed curvature indouble explants of Xenopus SBA tissue. A, B: two explants30min after preparation. C, D: same explants 4h later. Thearrow points to the much increased invagination. Each verti-cal column displays same explants separated by several hourstime interval. Bars = 100 µ m.
the tensed cell files at the different levels of the gradientshould be reversely proportional to this levels stresses:thus, cell files should be narrowed in the uphill direc-tion of the gradient [23,11,42]. In these cases the cells orthe particles of egg surface are always moving uphill thegradient [15], tending to smooth it out and even to re-verse. A spectacular example is a behavior of a gastrulastage Xenopus embryo sucked by one of its ends into apipette of a narrower diameter. For keeping mechanicalequilibrium, tensile stresses in the sucked part shouldincrease, creating thus a stress gradient going downhillto non-sucked part of embryo. Under these conditions,in spite of dropping down the sucking force up to zero(and even negative) value, the embryo continued to in-sert actively into a pipette up to complete penetrationsmoothing thus out the gradient [66]. Another exam-ple of the active responses to geometric constraints is abehavior of internally pressurized embryonic rudimentsof a toroid or semi-toroid shapes (a circular blastopo-ral lip of many embryos is an instructive example). Asknown from mechanics, the meridional (circular) ten-sions on the surfaces of such bodies are twice as muchas the equatorial ones. By a hyper-restoration princi-ple, there are the first ones to be at first relaxed andthen transformed into pressure stresses, molding from atorus a cucumber-like body elongated parallel to torusaxis. This is just what is taking place during normaldevelopment of Cnidarian embryos [58] and in the iso-lated lips of amphibian blastopores [11].
2.3 Mechano-sensitivity of gene expression
These results show that, instead of passively respondingto mechanical forces, embryonic tissues actively modu-late both the forces’ magnitude and their preferred di-

Mechanobiology and morphogenesis in living matter: a survey 5
rections, in a way that would be impossible to achievewithout affecting the molecular level events. Anothergroup of evidences favoring this scenario was a discov-ery of mechano-sensitive regulatory pathways involvedin genes expression. This line of investigations startedfrom [43], reporting that a brief localized pressure ap-plied to the stomodeum area of the mutant Drosophilaembryos (unable to develop this rudiment), was suf-ficient to remove the developmental block by activat-ing twist gene and possibly some others. The activa-tion was achieved by stimulating a regulatory protein,β-catenin, otherwise stored in a subcortical depot, tobe transported into cell nuclei. Next, Desprat et al.[34] showed that the deformation (indentation) of themesodermal rudiment in Drosophila embryos lackingsnail gene was enough to restore the normal mesoderm-forming capacities in these defective embryos. Address-ing to the representatives of quite other phylum, ze-brafish embryos, Brunet et al. [19] showed that if theexpression of a gene ntl, a homolog of an early meso-dermal marker brachyuri, was blocked by the arrest ofepiboly movements, it could be still renewed if stretch-ing the arrested cells by magnetic force. A key linkstimulated by exogeneous mechanical forces appearedto be the same in all these events: this was phosphory-lation of β- catenin by a tyrosine residue. As a result,the interactions between β-catenin and E-cadherines ofcell-cell junctions were repressed, permitting thus β-catenin release from junctions to cell nuclei where itactivates mesodermal genes. The role of tissue defor-mations in regulating genes expression was shown alsoin the above mentioned experiments by bending dou-ble explants (sandwiches) of SBA areas [57]. In theseexperiments a pan-neural gene, Sox3, was expressedin the concave (mostly compressed) area while muscleactin genes of the on the opposite stretched side (Fig.5,D,E). These patterns were in sharp contrast to the po-lar distribution of genes expression sites in straight ex-plants (Fig.5A) and their random distribution in spher-ical ones (Fig. 5B, C).
Other promising trend was initiated by a discov-ery of mechanically prestressed state of cell nuclei [68,22]. It is suggested that the effective shape of cell nu-clei is based upon the balance of external forces exertedby microfilaments and microtubules and intrinsic forcescaused by entropic nature of DNA polymers. That per-mits to regard the cell nucleus as a mechanosensor. Thenucleus stiffness is the smallest and fluidity of laminscaffold the greatest in non-differentiated cells as com-pared with those involved in differentiation. By speci-fying this suggestion, Chalut et al. [22] distinguishes anaıve, or totipotent state of stem cells from the primed,or pre-differentiation one. It is the latter period which
Fig. 5 Expression patterns of muscle actin gene (red) andpanneural marker Sox3 (blue) in straight (A), spherical (B, C)and bent (D, E) explants. Bars = 100 µm. For explanationssee text.
corresponds to the maximally decondensed state of chro-matine and the greatest softness of cell nuclei. Accord-ingly, the genome is maximally opened to the action ofmechanical forces just in this state.
3 The puzzle of size control: lessons fromsimple systems
A specific area of morphogenesis where mechanics is ex-pected to play a role is size control. In the section abovewe have learned that the tensional pattern can providecells with mutual positional information, so that com-plex structures can be produced (like in vasculogenesis).However also a global control on the size of organs ex-ists. In embryo development, cells stop proliferating athomeostasis, a target state that can account, at a macrolevel, for the shape and size of an organ. However, whilecontrol of mitosis is local, the spatial dimension of atissue is a global information. How do single cells getaware of that at the same time? Which is their com-munication mechanism? While morphogen factors aredemonstrated to play a key role in morphogenesis, andin particular for shape emergence, the possibility thatthey can produce a global control on size is controver-sial.
A fundamental contribution to the theory of mor-phogens is due to Lewis Wolpert [96], who proposedthe ”French flag model”. The central element of thismodel is the spatial distribution of the concentration ofspecific substances in the tissue: it is detected by thecells which, according to specific thresholds, trigger thetranscription of distinct sets of genes. According to thistheory, there is a direct correlation between the input(the concentration level) and the output (the response

6 D. Ambrosi et al.
of the tissue): each threshold corresponds to the bor-der of an expression territory. The first morphogen, thebicoid, was discovered in 1988 by Christiane Nusslein–Volhard; after that, many others have been identified. Ithas been later demonstrated that cells do not only de-tect the magnitude, the intensity of the concentrationof a morphogen, but they can also measure its localdirection of variation; the gradient can provide instruc-tions for polarization, migration, extension of philopo-dia and generation of complex structures [89]. More-over, recent biological discoveries have also pointed outthat physical and structural features inform cells abouttheir proliferation ability through mechanical regula-tion of few known mediators, e.g. YAP and TAZ, ofHippo signaling and organ growth [64]. Their activityis indeed confined to cells subjected to mechanical cues,such as either local stretching/bending or a change ofstiffness of the surrounding extracellular matrix [6].
To recast the idea of morphogenetic control in a for-mal way, we start considering a one-dimensional spatialdomain [0, L(t)] where a morphogen diffuses and de-grades. We illustrate elementary arguments that couldbe specialized to a specific morphogenetic system [2]; aswe are here mainly interested in methodological ques-tions, we just capture the main ideas. The morphogensource is located in x = 0 where it is produced ata constant rate α > 0, while it cannot flow at theright boundary L(t). The qualitative description aboverewrites in the following differential model, where c(x, t)represents the morphogen concentration and d(x, t) is aconjectured dilutant species. Without loss of generality,we take d(x, t = 0) = 1, so that:
−D ∂2c
∂x2= −kdc, (1)
∂c
∂x|x=0 = −α, ∂c
∂x|x=L = 0 (2)
(3)
The general solution of (1) is
c = c0 exp (−x/λ) + c1 exp (x/λ) .
where λ(t) =√D/(d(t)k). Enforcing the boundary con-
ditions gives
c(x, t) = αλcosh ((x− L)/λ)
sinh (L/λ)(4)
The power and the limits of the theory of morphogensstems from analyzing the solution (4) in the standardcase d = 1: the concentration field c(x, t) decays witha characteristic decay length λ, independent on the do-main size. The concentration of morphogen is there-fore a measure of ”how many λ’s” the boundary is faraway and it can in principle provide the position for the
boundary of one or more regions of fixed size. However,the physical value of λ usually ranges few hundreds ofmicrons, and for domain lengths L λ0,
c(x, t) ' αλ exp(−xλ
), (5)
the morphogen concentration exponentially decays farfrom the source and becomes rapidly inappreciable. Thetheoretical difficulty could be overcome conjecturingthe existence of an undegradable unidentified speciesd(t) that simply dilutes with length
L2d = L20 (6)
but such a speculation is not yet supported by experi-ments. It follows that the concentration of morphogenscan explain patterning in soft tissues of few λ’s, but itsapplication to size control exhibits conceptual difficul-ties for large organs.
An alternative approach to explain the size controlduring growth via a limited proliferation is based onmechanobiology [53]. Cells produce forces and then dis-placement and flow thanks to two inner mechanism:polimerization/depolimerization of the actin cytoskele-ton (the main structural component of a cell) and thecontraction of the actin network produced by the myosinmotors. In mechanobiology it is therefore customaryto distinguish between passive and active stress 1. Thepassive stress in the living matter is produced by trac-tion at the boundary of the body and possibly resid-ual stress due to geometrical incompatibility (see nextsection) when no internal forces are generated at a cel-lular level. A distinctive feature of mechanobiology isthat the pure passive behavior can be in principle mea-sured by standard techniques (nanoindentation, biax-ial tests) after inhibition of the myosin activity andactin polimerization, while the active stress can neverbe measured per se. From an energetic point of viewone could comment that passive stress can be dissipa-tive or not, while the active one is always fully dissipa-tive. The active stress can be modulated by the cells tocontrol polarization, migration, patterning and duplica-tion; it can depend on the stiffness of the environmentand on the externally applied load, possibly interactingwith the one the active matter produces [63]. Eventu-ally, stress is a natural candidate to convey informationon the size of the domain.
The first step to elucidate the possible role of me-chanics in size control should be a clear statement of therheology (“the constitutive laws”) of the living matter.Despite its appealing simplicity, the idea that cellular
1 Not to be confused with the distinction between activeand reactive forces in classical mechanics

Mechanobiology and morphogenesis in living matter: a survey 7
aggregates can be mechanically described as simple flu-ids (inviscid or viscous) with interface tension has beendisregarded in recent years in the light of a numberof experiments that elucidate the origin of the cell–cellstress in assemblies [75]. The force per unit surface in acellular aggregate is not a simple hydrostatic pressure,it can be spatially inhomogeneous and it is producedby the interplay between cell–cell adhesion and theircortical actomyosin cables that contract according tospecific directions. The perimetral anisotropic contrac-tion is known to promote cell migration by intercalationmechanism. We are here interested in understanding ifthe active stress produced by the cells might also conveyinformation about the domain size.
If the active stress is a key ingredient of the the-ory, it seems natural to add the active contribution tothe passive behavior of the cell aggregate, seen as aninert material. This decoupling is in principle possibleinhibiting the myosin activity in the cells and then per-forming standard stress-strain measures. However tech-nical difficulties (cell aggregates are very soft) and thevery complex rheological behavior of cells does not eas-ily allow to draw a conclusion. Mechanically active cellsin a monolayer exhibit a rheology that is more similarto a fluid rather than a solid; while the active stressgenerates cell flow, the tensional state state is not triv-ially a pressure. Laser ablation techniques show thatthe stress is non spherical in the material, even at equi-librium [75]. Most likely, cell aggregates behave like aBingham-type material: their tensional state dependson the strain above some tensional threshold, while theystart flowing above such a yield stress [3,93].
The simplest setting where mechanics might be testedas a possible long–range signal for size control is thecase of a pointwise (singular) source. Here a difficultyanalogous to the one illustrated for morphogenetic sourcesis encountered: in a three dimensional setting a point-wise force decays with the radial distance r like 1/r2
(take, for instance, the Kelvin solution in linear elastic-ity). This asymptotic behavior poorly supports the con-jecture that the stress can convey information on sizefor two reasons: it vanishes fast (quadratically) with thedistance and it involves no intrinsic length scale. There-fore the role of mechanics to disentangle puzzle of sizecontrol [94] should be investigated in more complex set-tings: when there is a cooperation with morphogens orin truly three dimensional problems, where the stressfield depends on the size of the domain.
We formalize this idea with two elementary exam-ples of finite elasticity reappraised in a “convey infor-mation” perspective; a much richer three-dimensionalrealm will be discussed in the next section. Considerfirst a bar of length L(t), homogeneously loaded in one
direction only. The first evidence is that a simple load-stress mechanical theory is useless for the sake of sizecontrol: since the growth time scale is very long withrespect to the relaxation times of the cellular material,viscosity plays no role, the tensional state in the bodydepends on the strain only and it is equal to the load (ifany) on the boundary, whatever its rheological proper-ties are. In other words, a homogeneous tensional fieldcan not convey any information. The scenario does notdramatically change if a homogeneous active stress isintroduced in the force balance: the tension will take adifferent value, but it remains size-independent.
A positional information based on the local straincan be instead obtained even for homogeneous mate-rials when more complex geometries and loads are as-sumed. As a representative example, consider the clas-sical Rivlin problem of a soft cylinder subject to a com-bined (homogeneous) finite axial stretch and torsion[73]. Assume that the deformation depends on the ma-terial cylindrical coordinates (R,Θ,Z) as follows
r = R/√λz, θ = Θ + γλzZ, z = λzZ, (7)
where γ is the torsion angle per unit length and λzis the uniform stretching ratio in the axial direction.The deformed configuration can be realized by applica-tion of a torque and an axial force only on the cylinderwith unloaded lateral surface, whatever are the mate-rial constitutive properties, under the incompressibilityconstraint. The left Cauchy-Green deformation tensorC takes the form
C =
1λz
0 00 1
λzrγ√λz
0 rγ√λz λ2
z(1 + r2γ2)
(8)
We see that the strain (and then the stress) dependon the spatial radial coordinate r. It follows that, inprinciple, a local measure of a mechanical quantity (thestrain) can provide positional information. In this casethe Czr component of the deformation is proportionalto the radial position, but no information about theaxial coordinate is provided. This kind of argumentscould be extensively applied in embryology.
The role of mechanics, so obscure and promising insize control, is nevertheless much more established inmorphogenesis, where in several systems it has beenproved that the emergence of instabilities is the phys-ical mechanism that nature uses to shape organs, asillustrated in the section below.

8 D. Ambrosi et al.
4 A continuum mechanics perspective formechanobiology and morphoelasticity
The need to account for the peculiar characteristicsof living matter versus inert materials has pushed to-wards both the refinement of classical mechanical mod-els and the development of novel theoretical and nu-merical frameworks, such as [7,50,61]. Much interest incontinuum mechanics has focused in modelling how softliving matter can either change its microstructure (re-modeling) or vary its mass (growth) [83,39].One of the most active research branches in this fieldhas coalesced around modeling living matter as an openchemo-thermo-mechanical system, where the chemicalenergy transported at the cellular level is adaptivelyspent for material rearrangements. This active behaviour,that has developed through evolution, displays two im-portant features: on one hand it ensures a continuousdynamical balance with the environment, on the otherhand it triggers morphological transitions. In the follow-ing, we critically review the continuum mechanics ap-proaches that deal with modeling the mechanical cuesof morphogenesis and shape emergence for materials,with a focus on systems that exhibit an elastic mechan-ical behavior.
4.1 Mechano-biological models coupling mechanicalstress and growth
The main challenge of mechano-biological modeling isto build the simplest realistic description of the macro-scopic effects triggered by a biochemical cascade of theinter-related developmental events from the molecularto the tissue scale, provoked by either genetic and epi-genetic causes [32].A reductionist viewpoint often relies on the seminalprinciple of homeostasis: all life phenomena result fromthe mutual balance between the inner the surroundingmedia. At the core of modern physiology, such a dy-namic equilibrium is postulated to regulate living or-ganisms despite the structural complexity of the build-ing blocks [18], thus relying on a continuous feedbackbetween mechanical and biochemical cues, occurring atthe cellular and sub-cellular scale and provoking effectup to the macroscale.Mechano-biological modeling complements classical con-tinuous approaches to account for the two fundamen-tal processes during tissue development, namely growthand remodeling. Both phenomena occur simultaneouslyin developmental biology, create tensional states that,in the time scale of interest, are even independent onthe applied surface loads, thus making morphogenesis
a highly nonlinear process [62]. Two main theoreticalframeworks have been developed to account for the ma-terial rearrangements of living matter. The first one fo-cuses on the residual strains: the mechanical descriptionsettles on the introduction of a stress-free, natural stateof the material. The starting point of the second ap-proach is the pattern of residual stresses, i.e. the stressin the body in its unloaded configuration. Both meth-ods are briefly illustrated in the following. For the sakeof simplicity, here we look at living matter, which isalways a multi-component material, as a single compo-nent one. This approach is not very restrictive: froma theoretical point of view, all the fundamental ques-tions on morphodynamics are already encoded in thesimpler one–component setting, although the mixturetheory can be more appropriate when specifying thebiomechanical system (see [4,54]). In same vein, we ne-glect to account for surface growth processes [45,82] aswell as softening phenomena observed during cell pro-liferation [41,74].
Initial strain methodThe initial strain method is rooted in the plasticity the-ory [60] and can be formally stated as follows: givenan hyperelastic material with strain energy W (F), thebehaviour of the evolving (growing, remodelling) ma-terial is dictated by the strain energy per unit massW (FF−1
g ), where F−1g has to be constitutively provided.
Growth is therefore a distortion: the energy of the un-loaded body in the reference configuration is W (F−1
g ),and the minimum (typically unique) is locally trans-posed in Fg. The intuitive idea is that, at each time,it exists a relaxed state in which the material is locallystress-free in any point [76], and the pull back to such a(local) state is provided by the tangent mapping F−1
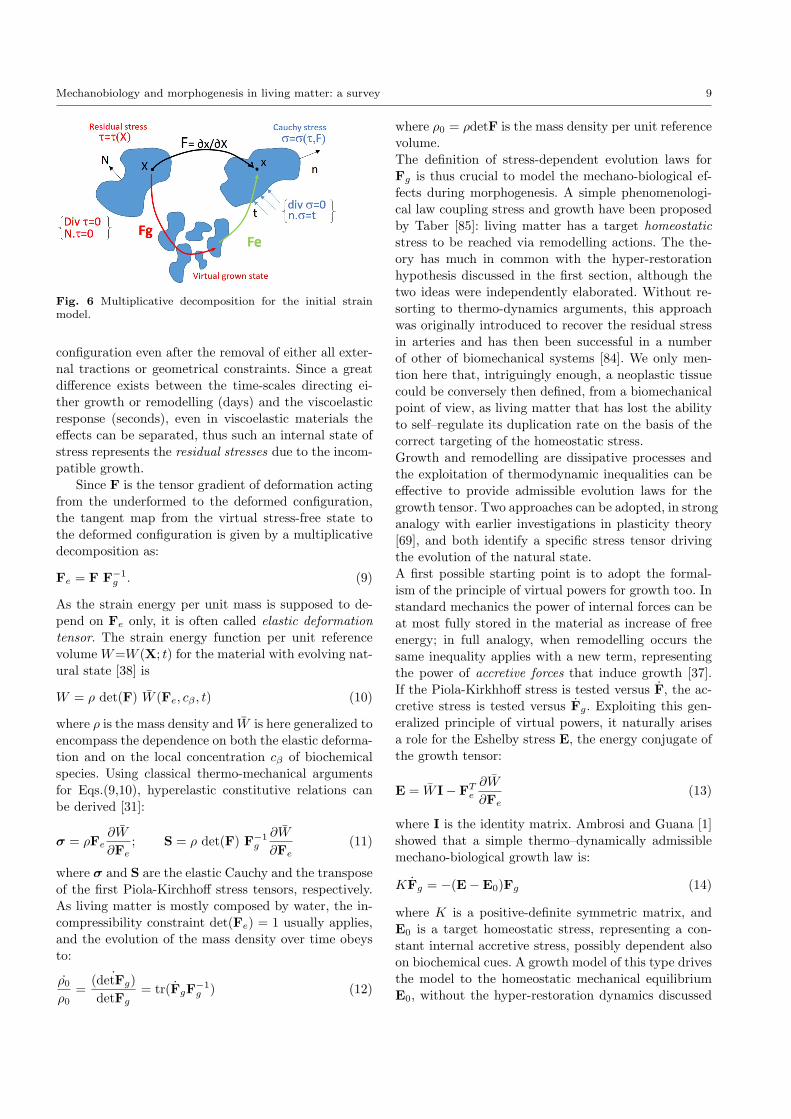
g .We remark that the idea of an intermediate, relaxedplacement is purely local: it is not a reachable globalconfiguration in the Euclidean space, but a collection of(possibly infinite) stress-free states, one for each mate-rial point and global compatibility or integrity is not en-sured. The virtual state is identified by the growth ten-sor Fg=Fg(X; t), whose inverse therefore gives the ini-tial strain in every material point X at time t, as shownin Figure 6. In practice, Fg represents the stretching oftangent vectors due to volumetric growth processes inthe interior of the body, whilst its inverse gives a lineartransplant from the reference crystal to the tangent ofthe underformed configuration [38,79]. As pointed outby Skalak [80,81], in general Fg cannot be expressed asthe gradient of a vector field, thus growth is said “in-compatible”. A major mechanical consequence is thatan internal state of stress persists in the undeformed
Mechanobiology and morphogenesis in living matter: a survey 9
Fig. 6 Multiplicative decomposition for the initial strainmodel.
configuration even after the removal of either all exter-nal tractions or geometrical constraints. Since a greatdifference exists between the time-scales directing ei-ther growth or remodelling (days) and the viscoelasticresponse (seconds), even in viscoelastic materials theeffects can be separated, thus such an internal state ofstress represents the residual stresses due to the incom-patible growth.
Since F is the tensor gradient of deformation actingfrom the underformed to the deformed configuration,the tangent map from the virtual stress-free state tothe deformed configuration is given by a multiplicativedecomposition as:
Fe = F F−1g . (9)
As the strain energy per unit mass is supposed to de-pend on Fe only, it is often called elastic deformationtensor. The strain energy function per unit referencevolume W=W (X; t) for the material with evolving nat-ural state [38] is
W = ρ det(F) W (Fe, cβ , t) (10)
where ρ is the mass density and W is here generalized toencompass the dependence on both the elastic deforma-tion and on the local concentration cβ of biochemicalspecies. Using classical thermo-mechanical argumentsfor Eqs.(9,10), hyperelastic constitutive relations canbe derived [31]:
σ = ρFe∂W
∂Fe; S = ρ det(F) F−1
g
∂W
∂Fe(11)
where σ and S are the elastic Cauchy and the transposeof the first Piola-Kirchhoff stress tensors, respectively.As living matter is mostly composed by water, the in-compressibility constraint det(Fe) = 1 usually applies,and the evolution of the mass density over time obeysto:
ρ0
ρ0=
˙(detFg)detFg
= tr(FgF−1g ) (12)
where ρ0 = ρdetF is the mass density per unit referencevolume.The definition of stress-dependent evolution laws forFg is thus crucial to model the mechano-biological ef-fects during morphogenesis. A simple phenomenologi-cal law coupling stress and growth have been proposedby Taber [85]: living matter has a target homeostaticstress to be reached via remodelling actions. The the-ory has much in common with the hyper-restorationhypothesis discussed in the first section, although thetwo ideas were independently elaborated. Without re-sorting to thermo-dynamics arguments, this approachwas originally introduced to recover the residual stressin arteries and has then been successful in a numberof other of biomechanical systems [84]. We only men-tion here that, intriguingly enough, a neoplastic tissuecould be conversely then defined, from a biomechanicalpoint of view, as living matter that has lost the abilityto self–regulate its duplication rate on the basis of thecorrect targeting of the homeostatic stress.Growth and remodelling are dissipative processes andthe exploitation of thermodynamic inequalities can beeffective to provide admissible evolution laws for thegrowth tensor. Two approaches can be adopted, in stronganalogy with earlier investigations in plasticity theory[69], and both identify a specific stress tensor drivingthe evolution of the natural state.A first possible starting point is to adopt the formal-ism of the principle of virtual powers for growth too. Instandard mechanics the power of internal forces can beat most fully stored in the material as increase of freeenergy; in full analogy, when remodelling occurs thesame inequality applies with a new term, representingthe power of accretive forces that induce growth [37].If the Piola-Kirkhhoff stress is tested versus F, the ac-cretive stress is tested versus Fg. Exploiting this gen-eralized principle of virtual powers, it naturally arisesa role for the Eshelby stress E, the energy conjugate ofthe growth tensor:
E = W I− FTe∂W
∂Fe(13)
where I is the identity matrix. Ambrosi and Guana [1]showed that a simple thermo–dynamically admissiblemechano-biological growth law is:
KFg = −(E−E0)Fg (14)
where K is a positive-definite symmetric matrix, andE0 is a target homeostatic stress, representing a con-stant internal accretive stress, possibly dependent alsoon biochemical cues. A growth model of this type drivesthe model to the homeostatic mechanical equilibriumE0, without the hyper-restoration dynamics discussed

10 D. Ambrosi et al.
in the previous section.An alternative approach considers the thermo-mechanicalbalance laws of open systems accounting for the massproduction inside the material [38], possibly occurringboth as a volumetric production and as a non-convectivemass flux [25]. In this case, it is found that the drivingforce of growth is the material Mandel stress M = SF,and a thermo-dynamically consistent evolution law forgrowth and remodelling reads:
Fg = f+(cβ , T )(M− g(cβ , T )Fg) (15)
where f+(ci, T ), g+(ci, T ) are positive definite scalarfunctions, whose expressions may represent a specificdependence on the temperature T (e.g. Arrhenius-basedrelations) to model the chemical reactions occurringduring the morphogenetic processes. In particular, g(ci, T )describes the amount of energy supplied by biochemicalsources, and f+(ci, T ) the fraction that can be trans-formed in growth. This theoretical framework has alsobeen extended to account for growth processes local-ized close to a boundary or an interface, thus providinga unified theory for modeling volumetric and surfacegrowth processes [27].Summarizing, Eqs.(14,15) both describe thermo-dynamicalconsistent laws for coupling stress-dependent evolutionlaws during morphogenesis. When a domain and bound-ary conditions are specified, they rewrite as systems ofnonlinear partial differential equations that can be ad-dressed in terms of rigorous methods [46].
An important example: the cardiac loopingThe cardiac looping is an example of paramount im-portance where mechanics interacts with morphogene-sis. During the Hamburger–Hamilton embryonic stage,the initially straight primitive heart tube bends andthen transforms in a looped tube, thus generating theprimordial structure of the four-chambers pump. Theearly stage of such a process is usually called c–looping;even the simple bending of the heart tube, is still verydebated in its fundamental dynamics [78]. According toan early hypothesis, the heart tube bends because itselongation during growth is constrained at the bound-ary; this explanation has been abandoned after the ob-servation that even an isolated, unbounded heart tubebends in culture [20,65]. Two main conjectures are thendebated to explain the heart tube bending: differentialgrowth and differential active stress. Differential growthmay be due to hyperplasia (more cells) or hypertrophy(cell enlargement). Differential tension may be due tothe active generation of stress by the cells themselves,exploiting their actomyosin machinery. In both casesthe correct mathematical formulation of the problemmust be based on the observation that the placement
at rest of the tube is not the straight one, but it is dis-torted by the differential growth (or tension): the elasticsystem places itself in the bent configuration such thatthe elastic energy is minimal when compared with thedistorted reference configuration.Taber and coworkers [78] faced the questions of car-diac looping on the basis of experiments and numericalsimulations. Isolated hearts in a lab have been treatedwith blebbistatin and cytochalasin, to inhibit myosinactivity and actin polimerization, respectively. Numer-ical simulations employ the theory illustrated in theprevious section, as specified in a cylindrical geometry:the growth tensor takes the diagonal form
Fg = diag (Frr, Fθθ, Fzz) (16)
and is not homogeneous: it depends on the circumfer-ential coordinate θ. The specific form of Fg dependson the investigated mechanism: growth (hypertrophyvs. hyperplasia) or active stress. Intriguingly enough,from a theoretical viewpoint all of these biomechanicalbehaviors can be framed in the very general theory ofdistortions discussed in the section above [5]. On thebasis of the orchestrated combination of experiments,theory and numerical simulation (in cylinder as well inreal geometry) the authors reach the conclusion thatdifferential myocardial growth is the primary bendingmechanism [78]. It remains however to be understoodhow the inhomogeneous growth pattern forms: an ex-planation could be provided by the elastic instabilitymechanisms.
Initial stress methodThe initial strain method has been extensively used inthe biomechanical literature in the last decades, how-ever it has a drawback: a direct experimental measure ofthe growth tensor Fg is impossible, because the residualstress should be locally released in every point. Thus,the initial strain method is often used in conjunctionwith simplifying assumptions of spherical or diagonalgrowth tensor, otherwise non-destructive data inversiontechniques should be developed to obtain the form ofFg.Since one can only access the pre-stressed, undeformedconfiguration of the material, Guillou and Ogden [47]proposed to extend the multiplicative decompositionapproach replacing Fg with a residual deformation ten-sor Fr, mapping the material evolution of the unde-formed state. This approach does not involve unreal-izable configurations, but calls for a functional depen-dence of W also on Fr.A more straightforward approach has been recently pro-posed in [30]. The starting point is to assume thatthe strain energy functions explicitly depends on both

Mechanobiology and morphogenesis in living matter: a survey 11
Fig. 7 Residually-stressed and deformed configurations forthe initial stress model.
the pre-existing residual stresses and on the elastic de-formation from the residually-stressed configurations.If the body occupies a volume Ω0 with an unloadedboundary ∂Ω0 and outward unit normal N in the ref-erence configuration, its residual stress tensor τ obeysthe balance laws:
Div τ = 0, τ = τT in Ω,
N.τ = 0 on ∂Ω,(17)
where Div is the divergence in material coordinates andW = W (F, τ ), as shown in Figure 7. If the W is anisotropic functional it can be written as a function of tenindependent invariants [77]: the six principal invariantsIαk, with α = (C, τ) and k = (1, 2, 3), of C = FTF andτ , plus the four mixed invariants:
J1 = tr(τC), J2 = tr(τC2),J3 = tr(τ 2C), J4 = tr(τ 2C2),
(18)
where tr indicates the trace operator. From standardthermo-mechanical considerations, the symmetric Cauchystress tensor σ = σ(F, τ ) in the deformed configurationreads:
σ = F(
3∑k=1
∂W∂ICk
∂ICk
∂F +4∑
m=1
∂W∂Jm
∂Jm
∂F
). (19)
The functional dependence ofW on the residual stressescan be restricted exploiting compatibility and objec-tivity requirements. In fact, the free energy must beconstant (say, zero) for the unstressed and undeformedbody, so that W (I,0) = 0. Then, the enforcement ofthe compatibility of the residual stress, i.e. σ(I, τ ) = τ ,provides three scalar equations. Finally, objectivity im-poses that
τ = F−1 ∂W
∂F(F−1,σ), (20)
representing nine scalar equations on the derivatives ofthe free energy with respect to the invariants. Theserequirements impose restrictions in the form of W . Forexample, if a simple neo-Hookean response is expected
when τ vanishes, the corresponding residually-stressedenergy takes the following functional form:
Ψ =12[λ(Iτj
) IB1 + J1 − 3µ]
(21)
where µ is the shear modulus, and λ = λ(Iτj ) is thereal positive root of λ3 + λ2Iτ1 + λIτ2 + Iτ3 − µ3 = 0.More complex natural behaviors can also be modeled,even if the functional dependence greatly complicates,possibly involving implicit relations between the invari-ants [55].
An example: optimal residual stresses in arteriesInitial strain and initial stress approaches can be com-pared using a simple system model, a residually stressedartery. Residual stresses arise during development andpossibly evolves further at mature stages: they are be-lieved to be the mechanical adaptation of arteries tohomogenize the transmural stress gradient generatedby the blood pressure [24].Such tension are typically investigated by a radial cut ofa tissue sample: the ring opens up, thus revealing an in-compatible state. Circumferential layers are in differenttensional states, the inner ones being even compressive[84]. The initial strain model has been employed to testthe hypothesis of uniform initial strain formulated in[86]. It is assumed that arteries remodel until the elas-tic deformation tensor Fe is homogeneous [35], being:
Fe = diag(
1/√λθλz,
√λθ/λz, λz
)(22)
where λθ = 2π/(2π−α), λz are the initial circumferen-tial and longitudinal strain, respectively, and α is theopening angle. The theoretical predictions of such aninitial strain approach are found well within the physi-ological pressure range [36], and the residual stress pro-duces the expected reduction of the transmural gradientof hoop stress caused by the physiological pressure.Even if (a constant) initial strain approach providesone possible solution, this gives only an approxima-tion of the underlying distribution of residual stressesin the tissue. Alternatively, the initial stress model canbe used to look for the residual stress distribution thatminimizes the transmural stress gradient. In particu-lar, it is possible to detect the undeformed, residually-stressed configuration by removing the internal pres-sure. Thus, one can immediately guess a functional ex-pression of τ that automatically satisfies Eq.(17), forexample introducing an Airy stress function. Then, itis possible to derive the underlying residual stress dis-tribution by applying a simple principle of functionaladaptation for homeostatic conditions. In the case ofarteries, it leads to identify the expression of τ which

12 D. Ambrosi et al.
minimizes the stress gradient when the artery is sub-jected to a physiological pressure. This case is discussedin [30], proving an optimal solution for the resultingCauchy stresses. In particular, it is shown that the ini-tial strain method overestimates the maximum stressinside the material.
In conclusion, although the initial strain model hasa simpler functional expression for the strain energyfunction, the initial stress model might have advantageswhen the initial strain can not be determined experi-mentally. Relevant examples are the non-destructive de-termination of residual stresses, that can be inferred, forexample, by nonlinear inverse-analysis from experimen-tal measurements on wave propagation in the staticallyunloaded, residually stressed material.
4.2 Mechanical pre-patterning and morpho-elasticity
The focus of the section above was on the smooth inter-play between growth and stress. However, as far as theremodelling process generates residual stresses, the ten-sional state can reach a limiting threshold such that anelastic instability arises, driving a morphological transi-tion at the macroscopic scale that can be considered asa mechanical pre-patterning. Morpho-elasticity investi-gates the emergence of shape as a mechanical transitionin growing living matter, merging together nonlinearelastic theories with perturbation techniques.The starting point is the identification of the deforma-tion gradient F0 = Grad x0 corresponding to the equi-librium solution of the elastic–growth problem. Such afinitely deformed configuration is associated with somescalar parameter: the eigenvalues of Fg, for the initialstrain model, or the components of τ , for the initialstress model. Such scalar variables will be later con-sidered as order parameters for the onset of an elasticbifurcation. The linear stability of the equilibrium con-figuration is performed applying an infinitesimal defor-mation δu in the form:
δu = uj(x0)ej (23)
where the scalar components uj correspond to the di-rection of the canonical basis vectors ej (j = 1, 2, 3).At first order, the perturbation determines a variationon the geometric deformation tensor,
δF = grad(δu)F0 (24)
where grad is the gradient operator in the current con-figuration. If kinematic constraints apply, they must be
satisfied by the perturbation too. For example, if theincompressibility applies, it requires
div(δu) = 0 (25)
Accordingly, the boundary elastic problem can be rewrit-ten by performing a series expansion around the basicsolution. The balance of linear momentum has the fol-lowing incremental form
div(δS) = 0 (26)
The increment δS of the push-forward of the Piola-Kirchhoff stress tensor in Eq.(26) has the following con-stitutive relation:
δS = A10 grad(δu) + p0 grad(δu)− δpI (27)
where p0, δp are the Lagrange multiplier for the basicincompressibility constraint and its incremental coun-terpart, respectively, and:
Ahklj = FhγFlβ∂2W
∂Fkγ∂Fjβ(28)
are the component of the fourth-order tensor A calcu-lated in F0, also known as the fourth-order tensor ofinstantaneous elastic moduli [72], where the sum overdummy subscripts applies. The incremental boundaryvalue problem is finally complemented by the boundaryconditions, which are typically expressed as a Dirichletcondition on a part ∂B0 of the boundary and a Neu-mann condition on the complementary portion ∂Bσ:
δu = u on ∂B0, δS = t on ∂Bσ. (29)
where u and t are imposed incremental displacementand traction loads, respectively.The solution of the (linear) incremental boundary valueproblem expressed by Eqs.(25,26,29) yields a dispersionrelation, giving the values of the order parameter as afunction of a spatial wavenumber of the perturbation.Since considerations of locally stability prove that thecorresponding perturbed configurations are neutrallystable, it is possible to identify the minimum vale of theorder parameter, as well as the corresponding wavenum-ber, determining the onset of an elastic bifurcation.In initial strain models the order parameter is oftenan eigenvalue of the growth tensor. Morphoelastic ap-proaches have been successful to determine the mor-phological transitions in several system models, whereresidual stresses arise as a consequence of either spa-tial constraint or differential growth. Practical exam-ples are the homogeneous, isotropic growth of an elas-tic layer [17] or of an annular tissue [8,71] under a rigidexternal wall, and bi-layered tissues with different (ho-mogeneous) swelling rates [26,9]. Morphoelasticity has

Mechanobiology and morphogenesis in living matter: a survey 13
Fig. 8 Top: Numerical simulations of the differential growthof the gastrointestinal mucosal layer (blue) over a soft meso-derm (blue); courtesy of Valentina Balbi (University ofManchester). The two snaphots are compared with the mu-cosal patterns observed endoscopically on the feline oesoph-agus (down, left) and on the jejunum (down, right); adaptedwith permission from [95].
been successful to predict the onset of mechanical pre-patterns in developing vertebral segmentation [91], tu-mours [27,33], airways [40], brain gyrification [87]. Anillustrative modeling example concerning intestinal em-bryogenesis is shown in Figure 8 [28].
In an initial stress setting the mathematical frameworkis analogue, but the pre-stress components naturallyappear as order parameter. The main advantage of thismethod is that the perturbation is superposed over anunderformed, pre-stressed configuration, with great sim-plifications for both the theoretical derivations and forthe development of robust simulation tools. In partic-ular, in plane strain elasticity a simple bifurcation pa-rameter is a material constant of the Airy stress func-tion for the pre-stress. This choice allows to investigatethe effects of a different functional expression of theresidual stresses on the onset of the bifurcations [29].In both approaches, the incremental equations simplydetect the onset of the bifurcation and the neutrallystable mode, but nothing can be inferred about the evo-lution of the bifurcated solution far from the threshold.One step toward a full nonlinear analysis can be per-formed either by higher order expansion in the incre-mental expansions [44] or performing a second variationof the energy functional [21]. Alternatively, finite ele-ment simulations can be performed, with specific con-tinuation algorithms to capture the bifurcated path inthe nonlinear regime. It is finally worth mentioning thatlinear stability techniques fail to determine the onset
of fully nonlinear instabilities, like crack nucleation orcrease formation [52].
5 Conclusions
Morpho-mechanics has rapidly developed in the lastdecades. In the biological community there is a generalagreement that mechanics plays a role in a very largenumber of morphogenetic systems. At the same time,important theoretical advancements have been estab-lished and the theory seems to be mature enough to beapplied to a variety of new biomechanical questions offundamental nature.Notwithstanding the advancements, open questions areeverywhere in morpho-mechanics. Take for example thenotion of tension in cellular monolayers. From a struc-tural point of view, this is a mesoscopic system, wherethe size of the elementary “periodic structure” (the cell)is not much smaller then the size of the overall sheet.The contractility of the cortex of the cells can generatea very directional pre-stress; however the representationsuch an active tension in terms of classical strain ener-gies, provided by homogenization arguments might bequestionable, because the length scales ratio betweencells (20µm) and organ (1 mm) is not very small.
The same argument applies to a possible generaliza-tion of the notion of surface tension: it can be appliedto biological tissues only allegorically, as characterizingtendency to internalization of particles (cells) which arein many orders greater than molecules. However suchan improper usage has sometimes proven to be useful.Another example is a rarely mentioned physical force,the surface pressure, the inverse of the surface tension,that accounts for the tendency to externalize differentscale particles and plays in morphogenesis a role greaterthan in inert matter.Finally, a rational classification of stress-generated forcesis closely associated with the poorly explored space-temporal structure of tissue stresses. What are theircharacteristic dimensions and times? Do they generatesmooth or sharp gradients? Do they oscillate and, inpositive case, what are their space-time domains of co-herence? In any case, we should be prepared to acceptthat the space/time derivatives of stress will be of muchgreater biological importance than their absolute val-ues.An effective elaboration of these and other open prob-lems calls for a novel approach, matching the rigour ofexact sciences with an adequate, non hyper-simplifiedpresentation of the biological behaviour.
Compliance with Ethical StandardsFunding: This study was funded by the AIRC grant

14 D. Ambrosi et al.
MFAG 17412. PC and DA are members of GNFM ofthe Istituto Nazionale di Alta Matematica (INdAM).Conflict of Interest: The authors declare that they haveno conflict of interest.
References
1. Ambrosi D, Guana F (2007) Stress modulated growth.Math Mech Solids 12:319-343.
2. Ambrosi D, Pettinati V, Ciarletta V (2015) Active stressas a local regulator of global size in morphogenesis. Int JNon-Linear Mech 75:5-14.
3. Ambrosi D, Preziosi L (2009) Cell adhesion mechanismsand stress relaxation in the mechanics of tumours. BiomechModel Mechanobiol 8:397-413.
4. Ambrosi D, Preziosi L, Vitale G (2010) The insight ofmixtures theory for growth and remodeling. ZAMP, 61:177-191.
5. Ambrosi D, Pezzuto S (2012) Active stress vs. activestrain in mechanobiology: constitutive issues. J Elasticity107(2):199-212.
6. Aragona M, Panciera T, Manfrin A, Giulitti S, MichielinF, Elvassore N, Dupont S and Piccolo S (2013) A me-chanical checkpoint controls multicellular growth throughYAP/TAZ regulation by actin-processing factors. Cell154(5):1047-1059.
7. Auricchio F, Da Veiga LB, Lovadina C, Reali A, TaylorRL, Wriggers P (2013) Approximation of incompressiblelarge deformation elastic problems: some unresolved issues.Comput Mech 52:11531167.
8. Balbi V and Ciarletta P (2013) Morpho-elasticity of in-testinal villi. J Royal Soc Interface 10(82):20130109.
9. Balbi V, Kuhl E, Ciarletta P (2015) Morphoelastic con-trol of gastro-intestinal organogenesis: theoretical predic-tions and numerical insights. J Mech Phys Solids, 78:493-510.
10. Belintzev BN, Beloussov LV, Zaraiskii AG (1987) Modelof pattern formation in epithelial morphogenesis. J TheorBiol 129:369-394.
11. Beloussov LV (2015) Morphomechanics of Development.Springer. Cham, Heidelberg, New York
12. Beloussov LV, Dorfman JG, Cherdantzev VG (1975) Me-chanical stresses and morphological patterns in amphibianembryos. J Embr Exp Morphol 34:559-574.
13. Beloussov LV, Lakirev AV, Naumidi II, Novoselov VV(1990) Effects of relaxation of mechanical tensions uponthe early morphogenesis of Xenopuslaevis embryos. Int JDev Biol 34:409-419.
14. Beloussov LV, Saveliev SV, Naumidi II, Novoselov VV(1994) Mechanical stresses in embryonic tissues: patterns,morphogenetic role and involvement in regulatory feedback.Intern Rev Cytol 150:1-34.
15. Beloussov LV, Luchinskaia NN, Stein AA (2000) Tension-dependent collective cell movements in the early gastrulaectoderm of Xenopus laevis embryos. Devel Genes and Evo-lution 210:92-104.
16. Beloussov LV, Luchinskaia NN, Ermakov AS, GlagolevaNS (2006) Gastrulation in amphibian embryos, regarded asa succession of biomechanical feedback events. Int J DevBiol 50:113-122.
17. Ben Amar M, Ciarletta P (2010) Swelling instability ofsurface-attached gels as a model of soft tissue growth undergeometrical constraints. J Mech Phys Solids 58:935-954.
18. Bernard C, Alglave E (1866) Lecons sur les proprietesdes tissus vivants. Bailliere.
19. Brunet T et al. (2013) Evolutionary conservation of earlymesoderm specification by mechanotransduction in Bilate-ria. Nature Comm 4:2821 — DOI: 10.1038/ncomms3821
20. Butler JK (1952) An experimental anaysis of cardiac loopformation in the chick, M.S. Thesis, University of TexasAustin, TX
21. Cao Y, Hutchinson JW (2012) From wrinkles to creasesin elastomers: the instability and imperfection-sensitivity ofwrinkling. Proc. R. Soc. A 468:94-115.
22. Chalut KJ, Guck J (2012) Chromatin decondensationand nuclear softening accompany Nanog downregulation inembryonic stem cells. Biophys J 103:2060-2070.
23. Cherdantzeva EM, Cherdantzev VG (2006) Geometryand mechanics of teleost gastrulation and the formation ofprimary embryonic axes. Int J Devel Biol 50:157-168.
24. Chuong CJ, Fung YC (1986) Residual stress in arteries.In Frontiers in Biomechanics (pp. 117-129). Springer NewYork.
25. Ciarletta P, Ambrosi D, Maugin GA (2012). Mass trans-port in morphogenetic processes: a second gradient theoryfor volumetric growth and material remodeling. J MechPhys Solids 60:432-450.
26. Ciarletta P, Amar MB (2012) Papillary networks in thedermalepidermal junction of skin: a biomechanical model.Mech Resh Comm, 42:68-76.
27. Ciarletta P, Preziosi L, Maugin GA (2013) Mechanobiol-ogy of interfacial growth. J Mech Phys Solids, 61(3), 852-872.
28. Ciarletta P, Balbi V, Kuhl E (2014) Pattern selection ingrowing tubular tissues. Phys Rev Lett, 113(24), 248101.
29. Ciarletta P, Destrade M, Gower AL, Taffetani M (2016)Morphology of residually stressed tubular tissues: Beyondthe elastic multiplicative decomposition. J Mech PhysSolids, 90:242-253.
30. Ciarletta P, Destrade M, Gower AL (2016) On residualstresses and homeostasis: an elastic theory of functionaladaptation in living matter. Scientific reports, 6.
31. Coleman BD, Noll W (1963) The thermodynamics ofelastic materials with heat conduction and viscosity. ArchRatl Mech Anal 13:167-178.
32. Davies J, Mechanisms of morphogenesis. Academic Press(2013)
33. Dervaux J, Couder Y, Guedeau-Boudeville MA, AmarMB (2011) Shape transition in artificial tumors: fromsmooth buckles to singular creases. Phys Rev Lett, 107(1),018103.
34. Desprat N, Supatto W, Poille PA, Beaurepaire E, FargeE (2008) Tissue deformation modulates twist expression todetermine anterior midgut differentiation in Drosophila em-bryos. Dev Cell 15:470-477.
35. Destrade M, Murphy JG, Ogden RW (2010) On deform-ing a sector of a circular cylindrical tube into an intacttube: existence, uniqueness, and stability. Int J Eng Sci-ence, 48(11):1212-1224.
36. Destrade M, Liu Y, Murphy JG, Kassab GS (2012) Uni-form transmural strain in pre-stressed arteries occurs atphysiological pressure. J Theor Biology, 303:93-97.
37. Di Carlo A, Quiligotti S (2007) On growth and balance.Mech Res Commun 29:449-456.
38. Epstein M, Maugin GA (2000) Thermomechanics of vol-umetric growth in uniform bodies. Int J Plasticity 16:951-978.
39. Epstein M (2015) Mathematical characterization andidentification of remodeling, growth, aging and morphogen-esis. J Mech Phys Solids 84:72-84.
40. Eskandari M, Pfaller MR, Kuhl E (2013) On the role ofmechanics in chronic lung disease. Materials 6:5639-5658.
Mechanobiology and morphogenesis in living matter: a survey 15
41. Etienne J, Fouchard J, Mitrossilis D, Bufi N, Durand-Smet P, Asnacios A (2015) Cells as liquid motors:Mechanosensitivity emerges from collective dynamics of ac-tomyosin cortex. Proc Natl Acad Sci USA, 112(9):2740-2745.
42. Evstifeeva A Yu and Beloussov LV (2016) Surface mi-crodeformations and regulations of cell movements in Xeno-pus development. Russ J Devel Biol 47:1-10.
43. Farge E (2003) Mechanical induction of Twist inthe Drosophila foregut/stomodeal primordium. Curr Biol13:1365-1377.
44. Fu YB, Ciarletta P (2015) Buckling of a coated elastichalf-space when the coating and substrate have similar ma-terial properties. Proc Royal Soc A, 471(2178):20140979.
45. Ganghoffer JF (2010) Mechanical modeling of growthconsidering domain variationPart II: Volumetric and sur-face growth involving Eshelby tensors. J Mech Phys Solids,58(9):1434-1459.
46. Ganghoffer JF, Plotnikov PI and Sokoowski J (2014)Mathematical modeling of volumetric material growth inthermoelasticity. J Elasticity, 117:111-138.
47. Guillou A, Ogden RW (2006) Growth in soft biologicaltissue and residual stress development. In Mechanics of bi-ological tissue (pp. 47-62). Springer Berlin Heidelberg.
48. Guirao B et al. (2015) Unified quantitative characteriza-tion of epithelial tissue development. eLIFE 4: e08519.
49. Harris AK, Stopak D, Warner P (1984) Generation ofspatially periodic patterns by a mechanical instability: amechanical alternative to the Turing model. J Embryol ExpMorphol 80:1-20.
50. Himpel, G, Kuhl, E, Menzel, A, Steinmann, P(2005). Computational modelling of isotropic multiplicativegrowth. Comp Mod Eng Sci, 8, 119-134.
51. His W(1878) Unsere Krpers Form. Leipzig, Engelmann.52. Hohlfeld E and Mahadevan L (2011) Unfolding the sul-
cus. Phys Rev Lett 106:105702.53. Hufnagel L, Teleman AA, Rouault H, Cohen SM and
Shraiman BI (2007) On the mechanism of wing size de-termination in fly development, Proc Natl Acad Sci USA104:3835–3840.
54. Humphrey JD, Rajagopal KR (2002) A constrained mix-ture model for growth and remodeling of soft tissues. MathModels Meth Applied Sciences, 12:407-430.
55. Johnson BE, Hoger A (1993) The dependence of the elas-ticity tensor on residual stress. J Elasticity, 33:145-165.
56. Kornikova ES, Korvin-Pavlovskaya EG, Beloussov LV(2009) Relocations of cell convergence sites and formationof pharyngula-like shapes in mechanically relaxed Xenopusembryos. Development, Genes and Evolution. 219:1-10.
57. Kornikova ES, Troshina TG, Kremnyov SV, BeloussovLV (2010) Neuro-mesodermal patterns in artificially de-formed embryonic explants: a role for mechanogeometry intissue differentiation. Devel Dynamics 239:885-896.
58. Kraus YA (2006) Morphomechanical programming ofmorphogenesis in Cnidarian embryos. Int J Devel Biol50:267-276.
59. Kremnyov SV, Troshina TG, Beloussov LV (2012) Activereinforcement of externally imposed folding in amphibianembryonic tissues. Mech Devel 129:51-60.
60. Kroner E (1958) Berechnung der elastischen Konstan-ten des Vielkristalls aus den Konstanten des Einkristalls.Zeitschrift fr Physik, 151(4), 504-518.
61. Kuhl E, Menzel A, Steinmann P (2003) Computationalmodeling of growth. Comput Mech 32.1-2: 71-88.
62. Lecuit T, Le Goff L (2007) Orchestrating size and shapeduring morphogenesis. Nature 450, 189-192.
63. Lo CM, Wang HB, Dembo M and Wang YL (2000) Cellmovement is guided by the rigidity of the substrate. BiophysJ 79(1):144–152.
64. Low BC, Pan CQ, Shivashankar GV, Bershadsky A, Su-dol M, Sheetz M (2014) YAP/TAZ as mechanosensors andmechanotransducers in regulating organ size and tumorgrowth. FEBS Lett, 588(16):2663-2670.
65. Manning A, and McLachlan JC, (1990) Looping of chickembryo hearts in vitro. J Anat 168:257–263.
66. Mansurov AN, Stein AA, Beloussov LV (2012) A simplemodel for estimating the active reactions of embryonic tis-sues to a deforming mechanical force. Biomech Mod Mech-biol 11:1123-1136.
67. Mao Y, Tournier AL, Bates PA, Gale JE, Tapon N andThompson BJ (2011) Planar polarization of the atypicalmyosin Dachs orients cell division in Drosophila, Genes andDevelopment, 25:131–136.
68. Mazumder A, GV Shivashankar (2010) Emergence of aprestressed eukaryotic nucleus during cellular differentia-tion and development. J R Soc Interface 7: S321-S330.
69. Maugin GA, Trimarco C (1992) Pseudomomentum andmaterial forces in nonlinear elasticity: variational formula-tions and application to brittle fracture. Acta Mechanica,94(1-2):1-28.
70. Meinhardt H (1982) Models of Biological Pattern Forma-tion. Acad Press NY
71. Moulton DE, Goriely A (2011) Circumferential buck-ling instability of a growing cylindrical tube. J Mech PhysSolids, 59(3):525-537.
72. Ogden RW. Nonlinear elastic deformations, Dover Pub-lications, 1997
73. Rivlin RS (1948a) Large elastic deformations of isotropicmaterials. III. Some simple problems in cylindrical polarco-ordinates. Phil Trans R Soc Lond A, 240:509525.
74. Ranft J, Basan M, Elgeti J, Joanny JF, Prost J, JulicherF (2010) Fluidization of tissues by cell division and apop-tosis. Proc Natl Acad Sci USA, 107(49), 20863-20868.
75. Rauzi M, Lenne PF (2011) Cortical forces in cell shapechanges and tissue morphogenesis. Curr Top Dev Biol95:93–144.
76. Rodriguez EK, Hoger A, McCulloch AD (1994) Stress-dependent finite growth in soft elastic tissues. J Biomech27(4):455–467.
77. Shams M, Destrade M and Ogden RW (2011) Initialstresses in elastic solids: constitutive laws and acoustoe-lasticity. Wave Motion 48(7):552–567.
78. Shi Y, Yao J, Xu G, Taber LA (2014) Bending the loopingheart: differential growth revisited, J Biomech Engin, 136,081002.
79. Spencer, AJM (2004). Continuum mechanics. CourierCorporation.
80. Skalak R (1981). Growth as a finite displacement field. InProceedings of the IUTAM Symposium on Finite Elasticity(pp. 347-355). Springer Netherlands.
81. Skalak R, Dasgupta G, Moss M, Otten E, DullemeijerP, Vilmann H (1982). Analytical description of growth. JTheor Biology, 94(3), 555-577.
82. Skalak, R, Farrow, DA, Hoger, A (1997). Kinematics ofsurface growth. J Math Biol, 35(8), 869-907.
83. Taber LA (1995) Biomechanics of growth, remodeling,and morphogenesis. Appl Mech Rev 48:487-545.
84. Taber L, Humphrey JD (2001) Stressmodulated growth,residual stress and vascular heterogeneity. ASME JBiomech Eng 123:528535.
85. Taber LA (2009) Towards a unified theory for morphome-chanics. Phil. Trans. R. Soc. A 367:3555-3583.

16 D. Ambrosi et al.
86. Takamizawa K, Hayashi K (1987) Strain energy densityfunction and uniform strain hypothesis for arterial mechan-ics. J Biomech 20(1):7-17.
87. Tallinen T, Chung JY, Biggins JS, Mahadevan L (2014)Gyrification from constrained cortical expansion. Proc NatlAcad Sci111(35):12667-12672.
88. Thompson, DArcy (1917) On Growth and Form. Cam-bridge Univ Press, Cambridge.
89. Tosin A, Ambrosi D, Preziosi L (2006) Mechanics andChemotaxis in the Morphogenesis of Vascular NetworksBull Math Biol 68(7):1819-1836.
90. Troshina TG, Glagoleva NS, Beloussov LV (2011) Sta-tistical study of rapid mechanodependent cell movementsin deformed explants in Xenopuslaevis embryonic tissues.Ontogenez (Russ J DevBiol) 42:301-310.
91. Truskinovsky, L, Vitale G, Smit TH (2014) A mechanicalperspective on vertebral segmentation. Int J Eng Science,83, 124-137.
92. Turing AM (1952) The chemical basis of morphogenesis.Phil Trans R Soc B, 237(641):37-72.
93. Verdier C, Etienne J, Duperray A, Preziosi L (2009)Review: Rheological properties of biological materials.Comptes Rendus Physique, 10(8), 790-811.
94. Vogel G (2013) How Do Organs Know When They HaveReached the Right Size?, Science 340.6137:1156-1157.
95. Wilcox CM, Munoz-Navas M, Sung JJY (2012) Atlas ofclinical gastrointestinal endoscopy.Elsevier Health Sciences.
96. Wolpert L (1969) Positional information and the spatialpattern of cellular differentiation. J Theor Biol 25:1-47.

MOX Technical Reports, last issuesDipartimento di Matematica
Politecnico di Milano, Via Bonardi 9 - 20133 Milano (Italy)
06/2017 Ekin, T.; Ieva, F.; Ruggeri, F.; Soyer, R.On the Use of the Concentration Function in Medical Fraud Assessment
07/2017 Cabassi A.; Pigoli D.; Secchi P.; Carter P.A.Permutation tests for the equality of covariance operators of functional datawith applications to evolutionary biology
05/2017 Menafoglio, A.; Hron, K.; Filzmoser, P.Logratio approach to distributional modeling
04/2017 Dede', L; Garcke, H.; Lam K.F.A Hele-Shaw-Cahn-Hilliard model for incompressible two-phase flows withdifferent densities
02/2017 Arena, M.; Calissano, A.; Vantini, S.Monitoring Rare Categories in Sentiment and Opinion Analysis - ExpoMilano 2015 on Twitter Platform.
03/2017 Fumagalli, I.; Parolini, N.; Verani, M.On a free-surface problem with moving contact line: from variationalprinciples to stable numerical approximations
01/2017 Riccobelli, D.; Ciarletta, P.Rayleigh-Taylor instability in soft elastic layers
58/2016 Antonietti, P. F.; Bruggi, M. ; Scacchi, S.; Verani, M.On the Virtual Element Method for Topology Optimization on polygonalmeshes: a numerical study
57/2016 Bassi, C.; Abbà, A.; Bonaventura, L.; Valdettaro, L.Large Eddy Simulation of gravity currents with a high order DG method
56/2016 Guerciotti, B.; Vergara, C.; Ippolito, S.; Quarteroni, A.; Antona, C.; Scrofani, R.A computational fluid-structure interaction analysis of coronary Y-grafts