mechatronik - thi.de · mechatronik bachelor fakultät für elektrotechnik und informatik . stand:...
TRANSCRIPT
Modulhandbuch
Mechatronik
Bachelor
Fakultät für Elektrotechnik und Informatik
Stand: 03.03.2016
Mechatronik Modulhandbuch
Inhalt 1 Einführung und Studienaufbau ................................................................................. 4
2 Modulbeschreibungen ............................................................................................. 5 2.1 Module des ersten Studienabschnitts ................................................................................ 5 Einführungsprojekt ...................................................................................................................... 5
Angewandte Physik ..................................................................................................................... 6
Ingenieurmathematik 1 ............................................................................................................... 7
Ingenieurmathematik 2 ............................................................................................................... 8
Elektrotechnik 1 ........................................................................................................................... 9
Elektrotechnik 2 ......................................................................................................................... 10
Grundlagen der Programmierung 1 .......................................................................................... 11
Grundlagen der Programmierung 2 .......................................................................................... 12
Technische Mechanik 1 ............................................................................................................. 13
Technische Mechanik 2 ............................................................................................................. 14
Messtechnik .............................................................................................................................. 15
2.2 Module des zweiten Studienabschnitts ............................................................................ 16 2.2.1 Schwerpunktunabhängige Module ................................................................................. 16 Festigkeitslehre und Werkstoffe ............................................................................................... 16
Konstruktion .............................................................................................................................. 17
Elektrische Antriebe und Leistungselektronik ........................................................................... 18
Regelungstechnik 1 ................................................................................................................... 20
Regelungstechnik 2 ................................................................................................................... 22
Digitaltechnik ............................................................................................................................. 23
Mikrocomputertechnik ............................................................................................................. 25
Digitale Signalverarbeitung ....................................................................................................... 27
Modellierung und Simulation dynamischer Systeme................................................................ 29
Mechatronische Komponenten ................................................................................................. 30
Projektmanagement .................................................................................................................. 31
Projekt ....................................................................................................................................... 32
Praktikum .................................................................................................................................. 33
Nachbereitendes Praxisseminar ................................................................................................ 34
Betriebswirtschaft ..................................................................................................................... 35
2
Mechatronik Modulhandbuch
Seminar zur Bachelorarbeit ....................................................................................................... 36
2.2.2 Module des Schwerpunktes Fahrzeugmechatronik........................................................ 37 Fahrzeugsysteme ....................................................................................................................... 37
Fahrzeugkomponenten ............................................................................................................. 38
Fahrzeugelektronik .................................................................................................................... 39
Fahrzeugintegration und -test ................................................................................................... 40
2.2.3 Module des Schwerpunktes Produktionsmechatronik ................................................... 41 Produktionstechnik und Prozesse ............................................................................................. 41
Industrielle Bildverarbeitung ..................................................................................................... 42
Robotik ...................................................................................................................................... 43
Automatisierungstechnik .......................................................................................................... 44
3
Mechatronik Modulhandbuch
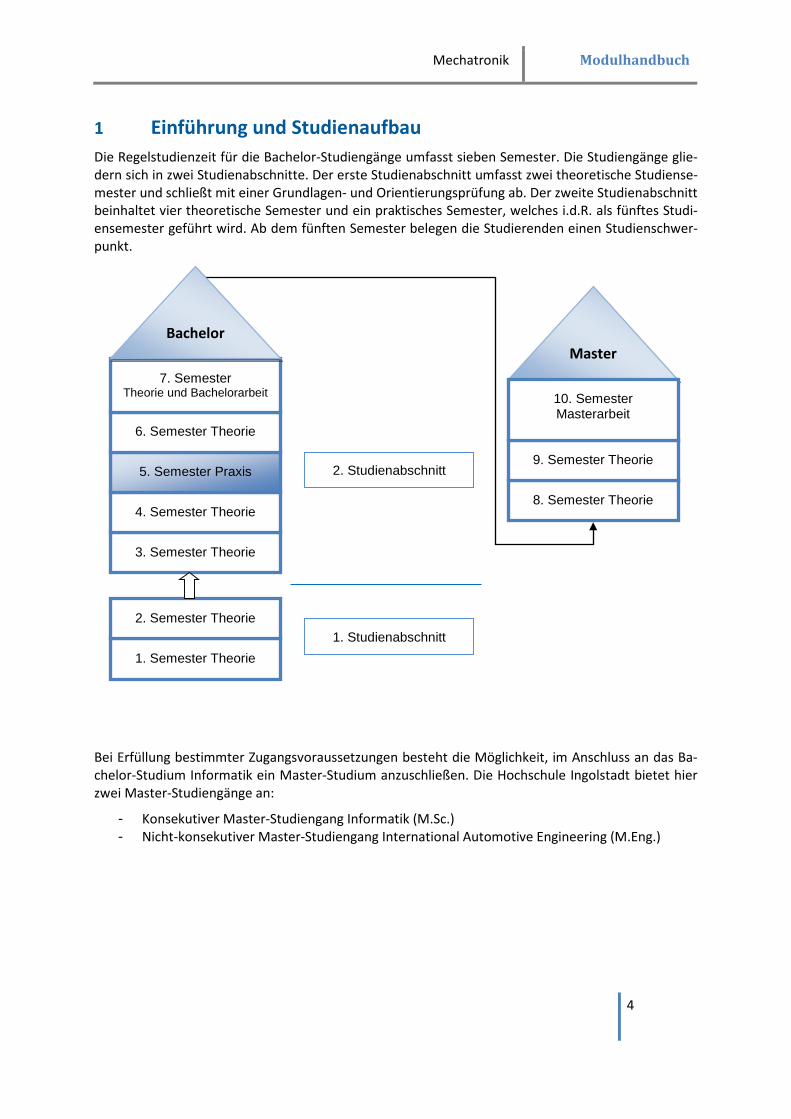
1 Einführung und Studienaufbau Die Regelstudienzeit für die Bachelor-Studiengänge umfasst sieben Semester. Die Studiengänge glie-dern sich in zwei Studienabschnitte. Der erste Studienabschnitt umfasst zwei theoretische Studiense-mester und schließt mit einer Grundlagen- und Orientierungsprüfung ab. Der zweite Studienabschnitt beinhaltet vier theoretische Semester und ein praktisches Semester, welches i.d.R. als fünftes Studi-ensemester geführt wird. Ab dem fünften Semester belegen die Studierenden einen Studienschwer-punkt.
Bei Erfüllung bestimmter Zugangsvoraussetzungen besteht die Möglichkeit, im Anschluss an das Ba-chelor-Studium Informatik ein Master-Studium anzuschließen. Die Hochschule Ingolstadt bietet hier zwei Master-Studiengänge an:
- Konsekutiver Master-Studiengang Informatik (M.Sc.) - Nicht-konsekutiver Master-Studiengang International Automotive Engineering (M.Eng.)
1. Semester Theorie
2. Semester Theorie
3. Semester Theorie
4. Semester Theorie
5. Semester Praxis
6. Semester Theorie
7. Semester Theorie und Bachelorarbeit
Bachelor
1. Studienabschnitt
2. Studienabschnitt
Master
8. Semester Theorie
9. Semester Theorie
10. Semester Masterarbeit
4
Mechatronik Modulhandbuch
2 Modulbeschreibungen 2.1 Module des ersten Studienabschnitts
Einführungsprojekt Modulkürzel: MT_EP SPO-Nr.: 1
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr.-Ing. Rudolf Gregor
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 2 ECTS / 2 SWS
Arbeitsaufwand: Kontaktstunden: 24 h Selbststudium: 26 h Gesamtaufwand: 50 h
Lehrveranstaltungen des Moduls:
Einführungsprojekt
Lehrformen des Moduls: Prj - Projekt
Prüfungsleistungen: LN - ohne/mit Erfolg teilgenommen
Angestrebte Lernergebnisse:
• Kenntnisse über Mikrocontrollerbausätze und -programmierung • Verstehen der Schaltungsgrundzüge/einf. C-Programme • Anwenden der Bauteile/Löten, Entwicklungsumgebung GNU • Analyse von Fehlern im Aufbau und in Programmen • Synthese von elektronischen Bauteilen/C-Befehlen • Beurteilung von einfachen Roboteraufgaben • Dimensionen der Elektronik auf Electronica oder Productronica
Inhalt:
• Bau eines programmierbaren, mikroelektronischen Systems (Roboter) • Einführungsveranstaltung in das Studium • Teilnahme an der Bibliotheksführung • Lehrfahrt zur Electronica oder Productronica • Roboterwettbewerb
5
Mechatronik Modulhandbuch
Angewandte Physik Modulkürzel: MT_PHY SPO-Nr.: 2
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr.-Ing. Steffen Lehner
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
2.1 Angewandte Physik (MT_PHY) 2.2 Praktikum Angewandte Physik (MT_PHYP)
Lehrformen des Moduls: MT_PHY: SU/Ü - seminaristischer Unterricht/Übung MT_PHYP: Pr - Praktikum
Prüfungsleistungen: MT_PHY: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_PHYP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Erkenntnis, dass physikalische Gesetze die Grundlagen der gesamten Technik darstellen • Kenntnis der wichtigsten physikalischen Grundgesetze • Hauptziel ist die Fähigkeit, physikalische Zusammenhänge hinter komplexen technischen Problemen zu
erkennen
Inhalt:
Vorlesung • Physikalische Grundgrößen • Schwingungen und Wellen • Strahlenoptik, Beugung und Interferenz • Wärmetransport, Thermodynamik • Fehlerrechnung (Praktikumsvorbereitung) Praktikum • 6 physikalische Experimente aus den Bereichen
o Mechanik o Akustik o Wellenoptik o Thermodynamik o Aerodynamik
6
Mechatronik Modulhandbuch
Ingenieurmathematik 1 Modulkürzel: MT_IM1 SPO-Nr.: 3
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr. rer. nat. Thomas Grauschopf
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Ingenieurmathematik 1
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Verständnis der ingenieurmathematischen Grundlagen und deren Anwendung auf Problemstellungen der Mechatronik
• Anwendung der Differential- und Integralrechnung einer und mehrerer Veränderlicher • Anwendung der linearen Algebra, Lösen linearer Gleichungssysteme • Entwicklung in Funktionsreihen
Inhalt:
• Allgemeine Grundlagen: Mengen, Aussagen und logische Verknüpfungen, Relationen und Abbildungen, Zahlen und Körper
• Analysis o Wiederholung der Grundlagen der Differential- und Integralrechnung für reellwertige Funktionen
einer Veränderlicher o Folgen und Reihen o Funktionsreihen: Taylorentwicklung, Potenz- und Fourierreihen
• Lineare Algebra o Lineare Gleichungssysteme o Matrizen o Komplexe Zahlen
7
Mechatronik Modulhandbuch
Ingenieurmathematik 2 Modulkürzel: MT_IM2 SPO-Nr.: 4
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 2
Modulverantwortliche(r): Prof. Dr. rer. nat. Thomas Grauschopf
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Ingenieurmathematik 2
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
Studierende verfügen über grundlegende Kenntnisse und Fähigkeiten der Auswahl und Anwendung mathe-matischer Verfahren zur Lösung ingenieurwissenschaftlicher Fragestellungen
Inhalt:
• Analysis: o Differential- und Integralrechnung skalar- und vektorwertiger Funktionen mehrerer Veränderlicher o Gewöhnliche Differentialgleichungen o Integraltransformationen: Fourier- und Laplacetransformation o Vektoranalysis
• Lineare Algebra o Vektorräume o Lineare Gleichungssysteme o Eigenwerte und Eigenvektoren
8
Mechatronik Modulhandbuch
Elektrotechnik 1 Modulkürzel: MT_ET1 SPO-Nr.: 5
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr.-Ing. Steffen Lehner
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 5 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 103 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
5.1 Elektrotechnik 1 (MT_ET1) 5.2 Übung zu Elektrotechnik 1 (MT_ET1U)
Lehrformen des Moduls: MT_ET1: SU/Ü - seminaristischer Unterricht/Übung MT_ET1U: Ü - Übung
Prüfungsleistungen: MT_ET1: schrP90 - schriftliche Prüfung, 90 Minuten MT_ET1U: LN - ohne Leistungsnachweis (%)
Angestrebte Lernergebnisse:
• Basiswissen zu elektrischen und magnetischen Feldern sowie zu elektrischen Netzwerken • Verständnis der grundlegenden Zusammenhänge der Elektrotechnik sowie deren Beschreibung mittels
höherer Mathematik • Eigenständiges Lösen von einfachen Anwendungen aus der allgemeinen Elektrotechnik
Inhalt:
• Elektrische Ladung, elektrisches Feld, Energie und Potential, Spannung, Kondensator • Strömungsfeld und Strom, Stromtransport in Metallen und Halbleitern, Widerstand, Verlustleistung • Magnetfeld, Induktion, Durchflutung, Spule • Integrale Maxwellgleichungen für elektrische und magnetische Felder, Induktions- und Durchflutungsge-
setz, Feldgrößen und deren Wechselbeziehung im inhomogenen Fall • Stromkreis, Knoten- und Maschengleichungen, grundlegende Verfahren zur Netzwerkberechnung • Gleichstromnetzwerke, Aufladevorgang von Kondensator und Spule • Wechselstromnetzwerke, Zeigerdiagramme und komplexe Darstellung, RC- und RL-Netzwerke, Schwing-
kreis, Drehstromsystem • Zweipole, lineare Quellen und Verbraucher • Nichtlineare Zweipole am Beispiel pn- und Schottky-Diode, statische Kennlinien, dynamisches nichtlinea-
res Verhalten, Linearisierung um einen Arbeitspunkt
9
Mechatronik Modulhandbuch
Elektrotechnik 2 Modulkürzel: MT_ET2 SPO-Nr.: 6
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 2
Modulverantwortliche(r): Prof. Dr.-Ing. Steffen Lehner
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 5 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 103 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
6.1 Elektrotechnik 2 (MT_ET2) 6.2 Übung zu Elektrotechnik 2 (MT_ET2U)
Lehrformen des Moduls: MT_ET2: SU/Ü - seminaristischer Unterricht/Übung MT_ET2U: Ü - Übung
Prüfungsleistungen: MT_ET2: schrP90 - schriftliche Prüfung, 90 Minuten MT_ET2U: LN - ohne Leistungsnachweis (%)
Angestrebte Lernergebnisse:
• Basiswissen und Verständnis der grundlegenden elektronischen Bauelemente, Schaltungen und system-theoretischen Zusammenhänge sowie deren mathematische Beschreibung
• Eigenständiges Lösen von grundlegenden Aufgaben aus der Elektronik und Systemtheorie
Inhalt:
• Vierpole, Übertragungsfunktion, Hochpass, Tiefpass • Transformator, Vierpolgleichungen und Ersatzschaltbilder • Nichtlineare Vierpole am Beispiel des Bipolar- und Feldeffekttransistors, Betrieb als Schalter, Betrieb als
Verstärker, Arbeitspunkt und Linearisierung • Nichtsinusförmige periodische Signale, Fourierreihe • Nichtperiodische Vorgänge, Einführung der Integraltransformationen, Zeitbereichsanalyse und Netzwer-
ken, stationäre und transiente Vorgänge • Anwendung auf grundlegende Schaltungen zum Ansteuern von elektromechanischen Aktoren
10
Mechatronik Modulhandbuch
Grundlagen der Programmierung 1 Modulkürzel: MT_GP1 SPO-Nr.: 7
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 7 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 105 h Gesamtaufwand: 175 h
Lehrveranstaltungen des Moduls:
7.1 Grundlagen der Programmierung 1 (MT_GP1) 7.2 Praktikum Grundlagen der Programmierung 1 (MT_GP1P)
Lehrformen des Moduls: MT_GP1: SU/Ü - seminaristischer Unterricht/Übung MT_GP1P: Pr - Praktikum
Prüfungsleistungen: MT_GP1: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_GP1P: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Detaillierte Kenntnisse der Syntax und Semantik prozeduraler Programmiersprachen • Fähigkeit zur Umsetzung natürlichsprachlich beschriebener Aufgabenstellungen in Algorithmen • Verwendung und Parametrisierung von Bibliotheksmodulen als Bestandteile von Programmen • Anwendung grundlegender Prinzipien des Software Engineerings bei der Programmierung
Inhalt:
Die Programmiersprache C: • Grundbegriffe und Prinzipien der prozeduralen Programmierung • Algorithmen und Daten, Typkonzept, Operatoren, Ausdrücke, Steueranweisungen, • Blockstruktur, Unterprogramme, Rekursion • Parameterübergabe, Speicherallokation, abstrakte Datentypen, Zeiger, Reihungen, Zeigerreihungen,
Stacks, Listen, Bäume
11
Mechatronik Modulhandbuch
Grundlagen der Programmierung 2 Modulkürzel: MT_GP2 SPO-Nr.: 8
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 2
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 7 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 105 h Gesamtaufwand: 175 h
Lehrveranstaltungen des Moduls:
8.1 Grundlagen der Programmierung 2 (MT_GP2) 8.2 Praktikum Grundlagen der Programmierung 2 (MT_GP2P)
Lehrformen des Moduls: MT_GP2: SU/Ü - seminaristischer Unterricht/Übung MT_GP2P: Pr - Praktikum
Prüfungsleistungen: MT_GP2: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_GP2P: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Detaillierte Kenntnisse der Syntax und Semantik objekt-orientierter Programmiersprachen • Fähigkeit zur Umsetzung natürlichsprachlich beschriebener Aufgabenstellungen in Algorithmen • Verwendung und Parametrisierung von Bibliotheksmodulen als Bestandteile von Programmen • Anwendung grundlegender Prinzipien des Software Engineerings
Inhalt:
Die Programmiersprache Java: • Grundbegriffe und Prinzipien objekt-orientierter Programmierung • Objekte, Klassen, Attribute, Methoden, Instantiierung, Referenzen, Generics, abstrakte Klassen, Inter-
faces, Polymorphie, Klassenmethoden, • Nutzung der Bibliothek, graphische Benutzeroberflächen, Events • Threads
12
Mechatronik Modulhandbuch
Technische Mechanik 1 Modulkürzel: MT_TM1 SPO-Nr.: 9
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 1
Modulverantwortliche(r): Prof. Dr. Thomas Schiele
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Technische Mechanik 1
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
Kenntnis grundlegender Begriffe und Berechnungsverfahren zur Statik
Inhalt:
Statik • Einführung der grundlegenden Begriffe und Definitionen • Ebene und räumliche Kräftesysteme • Tragwerke, inklusive Fachwerke • Schnittgrößen, innere Kräfte und Momente • Schwerpunktsberechnung • Reibung
13
Mechatronik Modulhandbuch
Technische Mechanik 2 Modulkürzel: MT_TM2 SPO-Nr.: 10
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 2
Modulverantwortliche(r): Prof. Dr. Thomas Schiele
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Technische Mechanik 2
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Fähigkeit, die für eine Bewegung starrer Körper erforderlichen Kräfte und Momente berechnen zu kön-nen
• Fähigkeit, Schwingungen qualitativ und quantitativ erfassen zu können
Inhalt:
Kinematik • Grundbegriffe der Kinematik, verschiedene Koordinatensysteme • Kinematik des Massenpunktes (skalar und vektoriell) • Kinematik starrer Körper • Translation und Rotation, Relativbewegung Kinetik • Grundbegriffe der Kinetik • Kinetik des Massenpunktes • Kinetik starrer Körper • Massenträgheitsmomente • Translation und Rotation, Relativbewegung Schwingungen • Einführung der grundlegenden Begriffe und Definitionen • Freie, ungedämpfte und gedämpfte Schwingungen • Erzwungene Schwingungen • Resonanzerscheinungen
14
Mechatronik Modulhandbuch
Messtechnik Modulkürzel: MT_MT SPO-Nr.: 11
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 2
Modulverantwortliche(r): Wolfgang Rößl
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
11.1 Messtechnik (MT_MT) 11.2 Praktikum Messtechnik (MT_MTP)
Lehrformen des Moduls: MT_MT: SU/Ü - seminaristischer Unterricht/Übung MT_MTP: Pr - Praktikum
Prüfungsleistungen: MT_MT: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_MTP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Kenntnisse der grundlegenden Messmethoden und Messstrukturen der analogen und digitalen Mess-technik
• Fähigkeit, einfache Messeinrichtungen zur Messung elektrischer und nichtelektrischer Größen zu konzi-pieren und hinsichtlich ihrer zu erwartenden Messunsicherheiten zu analysieren
Inhalt:
Grundbegriffe des Messens, messtechnische Strukturen, Übertragungseigenschaften von Messgliedern; Messfehler Funktion und Eigenschaften der wichtigsten analogen/digitalen Messgeräte zur Messung elektrischer und nichtelektrischer Größen
1. Fehlerrechnung, Fehlerarten, Regression 2. Messsignale und Strukturen 3. analoge Messgeräte 4. Messverstärker/OPV lin. und nichtlin. Schaltungen 5. A/D- und D/A-Wandlung 6. Messung v. Zeitdauer/Periode/Frequenz – Zähler 7. Messung nichtelektr. Größen – allg. Prinzipien, Temperatur
15
Mechatronik Modulhandbuch
2.2 Module des zweiten Studienabschnitts 2.2.1 Schwerpunktunabhängige Module
Festigkeitslehre und Werkstoffe Modulkürzel: MT_FW SPO-Nr.: 12
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 3
Modulverantwortliche(r): Prof. Dr. Christian Krä
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Festigkeitslehre und Werkstoffe
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Erlernen der Grundlagen metallischer Werkstoffe • Verständnis der Gesetzmäßigkeiten der Festigkeitslehre (Spannungs- und Verformungsberechnung für
verschiedene Beanspruchungsarten, Gestaltfestigkeit, Knicken) • Beurteilung der Festigkeit von Bauteilen • Festigkeits- und werkstoffgerechtes Auslegen von Konstruktionen
Inhalt:
• Aufbau, mechanisches Verhalten, Wärmebehandlung von metallischen Werkstoffen • Eisen-Basis-Legierungen und deren Wärmebehandlungen, • ausgewählte Werkstoffe • Werkstoffprüfung • Festigkeit elastischer Körper mit Zug-/Druck-, Biege-, Schub- und Torsionsbeanspruchung, • Verformungen • Stoffgesetze • statisch unbestimmte Systeme • Knickung • Gestaltfestigkeit
16
Mechatronik Modulhandbuch
Konstruktion Modulkürzel: MT_K SPO-Nr.: 13
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 4
Modulverantwortliche(r): Prof. Dr. Jörn Schlingensiepen
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
13.1 Konstruktion (MT_K) 13.2 Praktikum Konstruktion (MT_KP)
Lehrformen des Moduls: MT_K: SU/Ü - seminaristischer Unterricht/Übung MT_KP: Pr - Praktikum
Prüfungsleistungen: MT_K: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_KP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Maschinen und Maschinenteile normgerecht in Form einer technischen Zeichnung wie auch räumlich-anschaulich darstellen sowie in Form einer Stückliste dokumentieren,
• Maschinen und Maschinenteile unter Berücksichtigung von methodischen Vorgehensweisen und gestal-terischen Grundsätzen konstruieren.
Inhalt:
• normgerechte Darstellung von Maschinenteilen und Baugruppen mit Angaben für Oberflächen, Passun-gen, Toleranzen usw. einschließlich zugehöriger Stückliste,
• anschauliche, d.h. räumliche Darstellung, auch Freihand, von Maschinenteilen und Baugruppen, • Grundlagen des methodischen Konstruierens mit den Phasen Planen, Konzipieren, Entwerfen und Ausar-
beiten, • konstruktiver Entwurf nach Gestaltungsgrundregeln und -prinzipien.
17
Mechatronik Modulhandbuch
Elektrische Antriebe und Leistungselektronik Modulkürzel: MT_EL SPO-Nr.: 14
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 3
Modulverantwortliche(r): Prof. Dr. Johannes Pforr
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
14.1 Elektrische Antriebe und Leistungselektronik (MT_EL) 14.2 Praktikum Elektrische Antriebe und Leistungselektronik (MT_ELP)
Lehrformen des Moduls: MT_EL: SU/Ü - seminaristischer Unterricht/Übung MT_ELP: Pr - Praktikum
Prüfungsleistungen: MT_EL: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_ELP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
Die Studierenden lernen moderne Stromrichterantriebe kennen und können mit Hilfe einfacher Modelle die Antriebe dimensionieren. Zu den erworbenen Kompetenzen gehören: • Verständnis für die Grundbegriffe elektromechanischer Energiewandlung. • Verständnis des Funktionsprinzips leistungselektronischer Wandler • Kenntnis des stationären Verhaltens wesentlicher elektrischer Maschinen • Kenntnis von Verfahren zur Ansteuerung elektrischer Maschinen • Kenntnis einfacher Modelle zur Beschreibung des stationären und dynamischen Verhaltens elektrome-
chanischer Energiewandler • Kenntnis einfacher Modelle zur Beschreibung leistungselektronischer Wandler zur Ansteuerung der
elektrischen Maschinen • Fertigkeit zur Berechnung wesentlicher Eigenschaften der Stromrichterantriebe mit Hilfe der gegebenen
Maschinenmodelle • Fertigkeit, elektrische Antriebe für einfache Anwendungen mit Hilfe von Datenblättern auszulegen • Fähigkeit, mit Hilfe moderner Messgeräte das reale Verhalten von elektrischen Maschinen und leistungs-
elektronischen Steuergeräten zu bestimmen und mit dem theoretischen Verhalten basierend auf den in der Vorlesung behandelten Modellen zu vergleichen.
Inhalt:
Vorlesung • Funktionsprinzip und Aufbau elektrischer Maschinen und Stromrichterantriebe • Einfache stationäre und dynamische Modelle zur Bestimmung des Verhaltens von Gleichstrommaschinen • Einfache stationäre Modelle zur Bestimmung des Verhaltens von Asynchron- und Synchronmaschine. • Ansteuer- und Regelverfahren für Gleichstrom-, Asynchron- und Synchronmaschine. • Entwicklung linearer und zeitinvarianter Modelle für geschaltete Wandler zur Ansteuerung elektrischer
Maschinen. • Dimensionierung elektrischer Antriebe für einfachen Anwendungen Praktikum
18
Mechatronik Modulhandbuch
Versuchsaufbauten zu folgenden Themen: • Gleichstrommaschine • Asynchronmaschine • Synchronmaschine • Leistungselektronik I (DC-DC-Wandler) • Leistungselektronik II (DC-AC-Wandler) • Regelung eines Linearmotors
19
Mechatronik Modulhandbuch
Regelungstechnik 1 Modulkürzel: MT_RT1 SPO-Nr.: 15
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 3
Modulverantwortliche(r): Prof. Dr.-Ing. Rudolf Gregor
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
15.1 Regelungstechnik 1 (MT_RT1) 15.2 Praktikum Regelungstechnik 1 (MT_RT1P)
Lehrformen des Moduls: MT_RT1: SU/Ü - seminaristischer Unterricht/Übung MT_RT1P: Pr - Praktikum
Prüfungsleistungen: MT_RT1: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_RT1P: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
Die Studierenden lernen Verfahren zu Analyse von Rückführungs- und Kreisstrukturen kennen und können Regler für einfache Problemstellungen entwerfen. Zu den erworbenen Kompetenzen gehören: • Verständnis, warum Regelungen notwendig sind und wie sie prinzipiell arbeiten • Kenntnis über die Struktur von Regelungen und Steuerungen • Kenntnis von verschiedenen Reglertypen (PI, PID, PD-Regler) und Kenntnis, wann diese einzusetzen sind • Fertigkeit zur Nutzung der Laplace-Transformation zur Lösung linearer Differentialgleichungen mit kon-
stanten Koeffizienten • Fertigkeit, das Strukturbild einfacher dynamischer Systeme aus den Systemgleichungen zu entwickeln
und zu vereinfachen • Fertigkeit zur Anwendung einfacher Verfahren zur Analyse von Regelkreisen • Fertigkeit zur Synthese einfacher Regelkreise und zur Dimensionierung der Reglerparameter • Fähigkeit, mit Hilfe moderner Messgeräte und in der Vorlesung gelernter Methoden das reale Verhalten
von Systemen zu bestimmen und mit dem theoretischen Verhalten basierend auf den in der Vorlesung behandelten Modellen zu vergleichen.
• Fähigkeit, einen geeigneten Regler für das gegebene System auszuwählen und die Parameter des Reglers mit Hilfe bekannter Methoden zu optimieren.
Inhalt:
Vorlesung • Grundbegriffe der Regelungstechnik • Laplace-Transformation als mathematisches Werkzeug der Regelungstechnik • Strukturbild als anschauliches Modell dynamischer Systeme • Aufstellen der Systemgleichungen • Analyse des Regelkreises: Stationäres Verhalten, Stabilitätskriterien, Frequenzkennlinien, Wurzelortskur-
ven • Synthese von Regelkreisen und Anwendung von Entwurfsverfahren
20
Mechatronik Modulhandbuch
Praktikum Versuchsaufbauten zu folgenden Themen sind vorhanden: • Programmierung von mobilen und stationären Robotern • Steuerung einer Miniatur-Fertigungsanlage • Automatisierung mit PC und SPS • Temperaturregelung (PID) • Modellierung einer E-Gas-Drosselklappe • Positionsregelung einer E-Gas-Drosselklappe mit Hilfe eines Mikrocontrollers
21
Mechatronik Modulhandbuch
Regelungstechnik 2 Modulkürzel: MT_RT2 SPO-Nr.: 16
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 4
Modulverantwortliche(r): Prof. Dr.-Ing. Rudolf Gregor
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
16.1 Regelungstechnik 2 (MT_RT2) 16.2 Praktikum Regelungstechnik 2 (MT_RT2P)
Lehrformen des Moduls: MT_RT2: SU/Ü - seminaristischer Unterricht/Übung MT_RT2P: Pr - Praktikum
Prüfungsleistungen: MT_RT2: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_RT2P: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Verständnis, warum unterschiedliche Verfahren zur Regelung dynamischer Systeme eingesetzt werden • Kenntnis über die Arbeitsweise ausgewählter Regelverfahren • Fertigkeit zur Nutzung der Laplace- und der z-Transformation für die Bearbeitung linearer zeitkontinuierli-
cher und zeitdiskreter Regelkreise • Fertigkeit zur Anwendung unterschiedlicher Verfahren für die Analyse von Regelkreisen • Fertigkeit zur Synthese einfacher Regelkreise und zur Dimensionierung der Regelparameter
Inhalt:
• Regelung von einfachen Mehrgrößensystemen durch Entkopplung • Behandlung linearer kontinuierlicher Systeme im Zustandsraum • Einführung in digitale Regelungen • Einfache nichtlineare Regelsysteme
22
Mechatronik Modulhandbuch
Digitaltechnik Modulkürzel: MT_DT SPO-Nr.: 17
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 3
Modulverantwortliche(r): Prof. Dr. Georg Passig
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 7 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 105 h Gesamtaufwand: 175 h
Lehrveranstaltungen des Moduls:
17.1 Digitaltechnik (MT_DT) 17.2 Praktikum Digitaltechnik (MT_DTP)
Lehrformen des Moduls: MT_DT: SU/Ü - seminaristischer Unterricht/Übung MT_DTP: Pr - Praktikum
Prüfungsleistungen: MT_DT: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_DTP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Kenntnis der Darstellung von ganzen und Gleitkommazahlen in verschiedenen Zahlsystemen, inclusive Zweierkomplement
• Fähigkeit, Zahlen beliebiger Darstellung arithmetisch verknüpfen zu können • Kenntnis von Bit- und Schiebeoperatoren • Fähigkeit, die Gesetze der Schaltalgebra zur Minimierung des Schaltungsaufwands anwenden zu können • Fertigkeit zur Anwendung des KV-Diagramms und des Quine-McClusky-Verfahrens für die Schaltungsmi-
nimierung • Fähigkeit zur Synthese digitaler Schaltwerke aus logischen Gattern und Speicherelementen • Kenntnisse von Standardschaltwerken (Multiplexer, Demultiplexer, Synchronzähler, Asynchronzähler, n-
Bit-Addierer) • Fähigkeit, natürlichsprachlich beschriebene Aufgabenstellungen in Moore- oder Mealy-Automaten um-
setzen zu können • Fähigkeit zur systematischen Minimierung der Anzahl der Zustände eines endlichen Automaten • Kenntnis von Aufbau und Operationsprinzipien eines von-Neumann-Rechners • Kenntnis paralleler Rechnerarchitekturen (Pipelining, superskalare Architekturen, SIMD, MIMD, Multi-
threading, Multiprocessing) • Kenntnis programmierbarer Logikbausteine (FPGA) • Fähigkeit zur Nutzung von PC-gestützten Entwicklungsumgebungen zur Synthese und Simulation digitaler
Schaltungen • Fähigkeit, Schaltnetze und Schaltwerke in einer Hardwarebeschreibungssprache zu synthetisieren
Inhalt:
Vorlesung • Darstellung von Information für die Verarbeitung mittels digitaler Rechner. • Grundlagen des logischen Entwurfs digitaler Systeme: Schaltalgebra, Schaltfunktionen und ihre Darstel-
lung, Normalformen, Minimierung.
23
Mechatronik Modulhandbuch
• Analyse und Synthese von Schaltnetzen und Schaltwerken: Beschreibungsverfahren, Vorgehen bei Ent-wurf und Analyse, Flipflops und ihre Ansteuerung, arithmetisch-logische Einheiten, elementare Schalt-netze und Schaltwerke, endliche Automaten.
• Rechenwerke, Datenpfade, Steuerwerke • Parallelrechnerarchitekturen Praktikum • Einführung in das Altera FPGA board • Prinzipieller Aufbau von Field Programmable Gate Arrays (FPGAs) • Einführung in die Entwicklungsumgebung "Quartus II" • Einführung in die Hardwarebeschreibungssprache VHDL • Praktische Übungen mit dem FPGA board:
o Multiplexer und Demultiplexer, Ansteuerung von LEDs o Binär-zu-Hex- und Binär-zu-Dezimal-Decoder o Ansteuerung von Siebensegmentanzeigen o Verwendung des Quartus-II-Simulators o Zähler o Frequenzteiler o Mealy-Automaten
24
Mechatronik Modulhandbuch
Mikrocomputertechnik Modulkürzel: MT_MC SPO-Nr.: 18
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 4
Modulverantwortliche(r): Prof. Dr. Georg Passig
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
18.1 Mikrocomputertechnik (MT_MC) 18.2 Praktikum Mikrocomputertechnik (MT_MCP)
Lehrformen des Moduls: MT_MC: SU/Ü - seminaristischer Unterricht/Übung MT_MCP: Pr - Praktikum
Prüfungsleistungen: MT_MC: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_MCP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Fundierte Kenntnis über Aufbau und Leistungsfähigkeit von Mikrocomputersystemen und Programmen • Verstehen des Zusammenwirkens von Hardware und Software • Fähigkeit, auf Basis von Standardschaltungen anwendungsspezifische Mikrocomputer zu entwerfen und
hardwarenah zu programmieren • Fähigkeit, mit einer integrierten Entwicklungsumgebung Mikrocomputer hardwarenah in C zu program-
mieren und auf C-, Assembler- und elektrischer Signal-Ebene zu untersuchen
Inhalt:
Vorlesung • Architektur von Mikrocomputersystemen • Aufbau von Mikroprozessoren und Mikrocontrollern • Architektur von Steuergeräteprogrammen (Hauptschleife, Unterbrechungsmodus) • Programmierung von Mikrocontrollern, hardwarenahes C, typischer Maschinenbefehlssatz • Peripheriemodule von Mikrocontrollern (Ports, Timer, serielle Kommunikationsmodule, Analog-Digital
Wandler) • Serielle Standardkommunikationsnetzwerke (RS485, RS232, LIN, CAN, FlexRay) • Halbleiterspeichertechnologien für Mikrocomputer (SRAM, DRAM, EEPROM, Flash, FeRAM, MRAM,
PCRAM) • Busse und Systemstrukturen, Anbindung von Speicherbausteinen an Mikrocontroller • Grundlegende Schaltungsblöcke für Mikrocomputersysteme (Spannungsversorgung, Ein- und Ausgänge
für Sensoren und Aktuatoren, serielle Busanbindung, digitale und analoge Standard-Peripheriebausteine) Praktikum Für einen Versuchsaufbau auf der Basis eines XC161-Mikrocontrollers von Infineon ist mit Hilfe der integrier-ten Entwicklungsumgebung von Keil ein Programm zu entwickeln und auf der Zielhardware zu testen, so dass sich folgender Funktionsumfang ergibt: • Portansteuerung zum Einlesen einer Matrixtastatur • Interrupt- und Timerprogrammierung für Frequenz- und Zeitmessung
25
Mechatronik Modulhandbuch
• Treiberprogrammierung für eine alphanumerische Anzeige und Ausgabe von Statusmeldungen • Treiberprogrammierung für serielle Kommunikation über LIN- -Bus mit einem Master • Analog-Digitalwandlung und Pulsweitenmodulation zum Steuern und Regeln eines elektromechanischen
Aktuators
26
Mechatronik Modulhandbuch
Digitale Signalverarbeitung Modulkürzel: MT_DS SPO-Nr.: 19
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 4
Modulverantwortliche(r): Prof. Dr. Gordon Elger
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 6 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 80 h Gesamtaufwand: 150 h
Lehrveranstaltungen des Moduls:
19.1 Digitale Signalverarbeitung (MT_DS) 19.2 Praktikum Digitale Signalverarbeitung (MT_DSP)
Lehrformen des Moduls: MT_DS: SU/Ü - seminaristischer Unterricht/Übung MT_DSP: Pr - Praktikum
Prüfungsleistungen: MT_DS: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_DSP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
Nach erfolgreichem Abschluss beherrschen die Studierenden die theoretischen Grundlagen zur Beschreibung von deterministischen und stochastischen Signalen und linearen Systemen im Zeit- und Frequenzbereich. Sie sind in der Lage diese Kenntnisse zur Analyse und Entwicklung von zeitdiskreten rekursiven und nichtrekursi-ven Filtern in unterschiedlichen Strukturen (z.B. Parallel- oder Kaskadenstruktur) anzuwenden. Sie verstehen den Aufbau und den Einsatzzweck von Multiratensystemen und beherrschen die hierfür notwendigen Metho-den der Abtastratenumsetzung. Die Studierenden kennen die Funktionsweise und die prinzipiellen Einsatz-möglichkeiten von adaptiven Filtern und des Wiener-Filters.
Inhalt:
• Grundlagen zur Signal- und Systembeschreibung o Fourier-Reihe und Fourier-Transformation o Laplace-Transformation o z-Transformation o Beschreibung von Signalen im Zeit- und Frequenzbereich (Energie- und Leistungssignale, Faltung,
Korrelation, Energiedichtespektrum, Parsevalsches Theorem). o Abtastung von zeitkontinuierlichen Signalen (Abtasttheorem) o Beschreibung von stochastischen Signalen und Prozessen (Verteilungs- und Verteilungsdichtefunk-
tion, Erwartungswert, Varianz, Momente, Korrelationsfunktionen, Leistungsdichtespektrum) o Beschreibung linearer zeitinvarianter Systeme im Zeit- und Frequenzbereich (Übertragungsfunktion,
Amplitudengang, Phasengang, Impulsantwort) o Beschreibung der Transformation von deterministischen und stochastischen Signalen über lineare
zeitinvariante Systeme • Grundlegende Filterstrukturen
o Beschreibung von FIR- und IIR-Filtern o Verfahren zur Filterapproximation (Bilineare Transformation, Impulsinvariante Approximation) o Filterstrukturzerlegung (Parallel- und Kaskadenstruktur)
• Wiener-Filter
27

Mechatronik Modulhandbuch
o Wiener-Filter mit endlicher Impulsantwort o Allgemeines nichtkausales Wiener-Filter o Allgemeines kausales Wiener-Filter
• Adaptive Filter o Aufbau und typische Anwendungen o RLS-Algorithmus
• Abtastratenumsetzung o Interpolator (Abtastratenerhöhung)
• Dezimator (Abtastratenerniedrigung)
28
Mechatronik Modulhandbuch
Modellierung und Simulation dynamischer Systeme Modulkürzel: MT_MDS SPO-Nr.: 20
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 4
Modulverantwortliche(r): Prof. Dr.-Ing. Steffen Lehner
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Modellierung und Simulation dynamischer Systeme
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Kenntnis von Matlab/Simulink • Die Studenten wissen, wie man ein (eventuell auch nicht-lineares) Differentialgleichungssystem in einem
Simulationsmodell formuliert • Verständnis des numerischen Lösungsverfahrens und der damit verbundenen Einstellmöglichkeiten
(Schrittweite, Genauigkeit, Integrationsverfahren) • Befähigung, geeignete Einstellungen für ein entworfenes Simulationsmodell zu wählen • Die Studenten sind in der Lage, die Simulationsmodelle sinnvoll zu strukturieren • Sie sind in der Lage, die Modelle zu verifizieren und zu validieren
Inhalt:
• Matlab • Simulink • Numerische Verfahren (Runge-Kutta, Euler etc.) • Möglichkeiten der Validierung und Verifizierung • Top-Down, Bottom-Up-Ansatz • Strukturierung (Modularität, Hierarchie etc.)
29
Mechatronik Modulhandbuch
Mechatronische Komponenten Modulkürzel: MT_MK SPO-Nr.: 21
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 3
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Mechatronische Komponenten
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Grundlegendes Verständnis für den Aufbau und die Anwendung mechatronischer Komponenten • Grundlegendes Verständnis für Verfahren und Methoden zur mathematischen Beschreibung von mecha-
nischen und elektrischen Systemen und deren Verbindung in mechatronischen Komponenten • Fähigkeit zur Verbesserung und Entwicklung mechatronischer Komponenten und Teilsysteme
Inhalt:
• Grundlagen elektromechanischer Komponenten • Methoden zur Beschreibung, Modellierung und Entwicklung mechatronischer Systeme • Verfahren und Sensoren zur Messung mechanischer Größen • Elektromotorische, elektrohydraulische und piezoelektrische Aktuatoren • Mechatronische Anwendungen
30
Mechatronik Modulhandbuch
Projektmanagement Modulkürzel: MT_PM SPO-Nr.: 22
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr. Bernd Hafenrichter
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Projektmanagement
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
Die Studierenden besitzen grundlegende Kenntnisse des Projektmanagements insbesondere für technischer Projekte. Sie verfügen über die Fähigkeit zur Anwendung systematischer Methoden bei der Vorbereitung, der Planung, Überwachung und Steuerung sowie der Risikoabsicherung von Projekten. Die Studierenden kennen ein gängiges Projektmanagement-Werkzeug und können dieses zur Planung und Überwachung eines konkreten Projekts einsetzen. Die Studierenden sind vorbereitet auf die erfolgreiche Arbeit in Projektteams. Die Studierenden beherrschen die Techniken wissenschaftlichen Arbeitens.
Inhalt:
- Projektmanagement-Grundlagen: Begriffsdefinitionen, Eigenschaften und Klassifizierung von Projekten, Projektumfeld, Projektorganisationsformen, Projektgremien, Projektdokumentation;
- Projektmanagement nach Phasen: o Projektdefinition (Projektziele Umfeldanalyse, Risikoabschätzung, Projekt-Kick-Off) o Projektplanung (Projektstrukturplanung, Termin- und Ablaufplanung, Aufwandsschätzung, Kostenpla-
nung) o Projektüberwachung und –steuerung o Projektabschluss
- Analyse von Projektmanagement-Fallstudien in Teamarbeit - Übungen mit MS-Project - Informations- und Methodenkompetenz (Bibliothek): Recherchestrategie, Evaluation Informationsquellen,
Plagiate, Zitieren
31
Mechatronik Modulhandbuch
Projekt Modulkürzel: MT_PRJ SPO-Nr.: 23
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Projekt
Lehrformen des Moduls: Prj - Projekt
Prüfungsleistungen: Projektarbeit
Angestrebte Lernergebnisse:
Fähigkeit, die im Studium erworbenen Kompetenzen anzuwenden, um eine komplexe fachliche Aufgabenstel-lung zu analysieren und über ein Semester hinweg in einem Team erfolgreich zu bearbeiten. Fähigkeit, Projektergebnisse vor Publikum überzeugend zu präsentieren.
Inhalt:
32
Mechatronik Modulhandbuch
Praktikum Modulkürzel: MT_P SPO-Nr.: 29
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik 5
Modulverantwortliche(r):
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 24 ECTS / 0 SWS
Arbeitsaufwand: Kontaktstunden: 0 h Selbststudium: 600 h Gesamtaufwand: 600 h
Lehrveranstaltungen des Moduls:
Praktikum
Lehrformen des Moduls:
Prüfungsleistungen: Projekt-/Praxisbericht
Angestrebte Lernergebnisse:
Die Studenten können das in den vorhergehenden theoretischen Semestern Gelehrte in der betrieblichen Pra-xis in einer ingenieurnahen Tätigkeit anwenden.
Inhalt:
- Auswahl eines geeigneten Unternehmens im In- oder Ausland - Mitarbeit an konkreten betrieblichen Aufgabenstellungen unter Anwendung der erlernten ingenieurwissen-
schaftlichen Methoden - Kennenlernen betrieblicher Abläufe und Arbeitsmethoden - Führen eines Berichtsheftes
33
Mechatronik Modulhandbuch
Nachbereitendes Praxisseminar Modulkürzel: MT_PS SPO-Nr.: 30
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr. Bernhard Glavina
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 2 ECTS / 1 SWS
Arbeitsaufwand: Kontaktstunden: 12 h Selbststudium: 38 h Gesamtaufwand: 50 h
Lehrveranstaltungen des Moduls:
Nachbereitendes Praxisseminar
Lehrformen des Moduls: S - Seminar
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
Die Studenten sollen befähigt werden, in konzentrierter Form über ein Projekt größeren Umfangs vor Publi-kum referieren zu können
Inhalt:
Bericht über das Praxissemester
34
Mechatronik Modulhandbuch
Betriebswirtschaft Modulkürzel: MT_BW SPO-Nr.: 31
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 4 ECTS / 3 SWS
Arbeitsaufwand: Kontaktstunden: 35 h Selbststudium: 65 h Gesamtaufwand: 100 h
Lehrveranstaltungen des Moduls:
Betriebswirtschaft
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
Die Studenten sollen befähigt werden, als Ingenieure in einem Unternehmen wirtschaftlich sinnvoll zu planen und zu handeln.
Inhalt:
• Strategische und operative Ziele von Unternehmen • Ablauf- und Aufbauorganisation • Markt, Marken, Marketing • Betriebswirtschaftliche Kenngrößen • Bilanzierung, Gewinn- und Verlustrechnung, EBIT, EBITDA • Deckungsbeitragsrechnung • Amortisation von Investitionen • Innovationsmanagement • Controlling
35
Mechatronik Modulhandbuch
Seminar zur Bachelorarbeit Modulkürzel: SPO-Nr.: 27
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik 7
Modulverantwortliche(r): Studiengangleiter
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 3 ECTS / 2 SWS
Arbeitsaufwand: Kontaktstunden: 24 h Selbststudium: 51 h Gesamtaufwand: 75 h
Lehrveranstaltungen des Moduls:
Seminar zur Bachelorarbeit
Lehrformen des Moduls:
Prüfungsleistungen: LN - ohne/mit Erfolg teilgenommen
Angestrebte Lernergebnisse:
Die Studierenden sind in der Lage, eine Bachelorarbeit anzufertigen
Inhalt:
- Allg. Informationsveranstaltung zum Thema BT
- Regelmäßige Durchsprache des Fortschritts der BT im Einzelgespräch beim jeweiligen Betreuer
36
Mechatronik Modulhandbuch
2.2.2 Module des Schwerpunktes Fahrzeugmechatronik
Fahrzeugsysteme Modulkürzel: MT_FS SPO-Nr.: 24.1
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Fachwissenschaftli-ches Wahlpflichtfach
6
Modulverantwortliche(r): Prof. Dr.-Ing. Thomas Brandmeier
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Fahrzeugsysteme
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Grundlegendes Verständnis für das Fahrverhalten von Fahrzeugen und der physikalischen Ursachen • Fähigkeit, dieses Verhalten in mathematische Modelle abzubilden • Grundlegendes Verständnis für die elektrischen Eingriffsmöglichkeiten in Bremse, Fahrwerk und Lenkung • Fähigkeit zur Entwicklung von Fahrzeugregelungen • Fähigkeit zum Test der Ergebnisse in der Simulation
Inhalt:
• Grundlagen der Fahrdynamik und Fahrzeugmodellbildung sowie der Anwendung in Fahrzeugregelsyste-men
• Reifenmodelle • Fahrzeugmodelle(Einspurmodell: linear, nichtlinear, stationär, instationär sowie Zweispurmodell) • Abbildung der Fahrzeugmodelle in Matlab/Simulink und Vergleich mit IPG-Simulator • Seitenwindverhalten von Fahrzeugen • Aktive und passive Fahrwerkregelsysteme • Fahrstabilitätsregelung(ESP) • Elektrische Lenksysteme/Überlagerungslenkung und Steer-by-Wire • Kombination von Fahrwerks-, Brems- und Lenkeingriff
37
Mechatronik Modulhandbuch
Fahrzeugkomponenten Modulkürzel: MT_FK SPO-Nr.: 24.2
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 6
Modulverantwortliche(r): Prof. Dr. Michael Botsch
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Fahrzeugkomponenten
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Grundverständnis für mechatronische Fahrzeugkomponenten und Fahrzeugteilsysteme mit der Fähigkeit zur Dimensionierung und Spezifizierung elektromechanischer Fahrzeugkomponenten
• Modellierung und mathematische Beschreibung mechatronischer Fahrzeugfunktionen zur eigenständigen Realisierung von Hard- und Softwareanpassung für die Weiterentwicklung bzw. Neuentwicklung vernetz-ter Fahrzeugkomponenten
• Grundverständnis für das Zusammenwirken vernetzter Fahrzeugteilsysteme im Gesamtverbund mit de-ren starken Interdependenzen
• Fähigkeit zur Nutzung und Verbesserung der Fahrzeugteilsysteme im Hinblick auf zukünftige Herausfor-derungen in der Automobiltechnik wie z.B. Emissionen, Fahrzeugsicherheit, autonomes Fahren
Inhalt:
• Aufbau und Funktionsweise wesentlicher mechatronischer Fahrzeugkomponenten (Bremsen, Fahrwerk, Lenkung, Antrieb, Beleuchtung, aktive und passive Fahrzeugsicherheit, Nebenaggregate, Abgasnachbe-handlung, Hybridkonzepte)
• Physikalische Grundlagen der Fahrzeugkomponenten mit den etablierten Methoden der Thermodynamik, Regelungstechnik, Fahrzeugphysik, Systemmodellbildung, Softwareentwicklung und Bauteilauslegung
• Modellbildung von Fahrzeugsystem- und Teilsystemkomponenten zur Weiterentwicklung von Bauteil und der Funktionsumfänge: Methoden der Hard- und Softwareentwicklung von mechatronischen Fahrzeug-komponenten.
• Ableitung spezifischer Anforderungen an mechatronische Fahrzeugkomponenten, deren Funktions- und Wirkweise
38
Mechatronik Modulhandbuch
Fahrzeugelektronik Modulkürzel: MT_FE SPO-Nr.: 24.3
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Fachwissenschaftli-ches Wahlpflichtfach
6
Modulverantwortliche(r): Prof. Dr.-Ing. Thomas Brandmeier
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Fahrzeugelektronik
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Überblick über die Fahrzeugelektronik speziell im Automobilbereich • Überblick über die aktuellen Neuentwicklungen in der Automobiltechnik • Fähigkeit, elektrotechnische Grundlagen zur Entwicklung von Fahrzeugkomponenten wie Sensoren, Akto-
ren und Bussysteme einzusetzen • Grundkenntnisse wie Elektronikkomponenten unter extremen Sicherheits-, Robustheits- und Kostenan-
forderungen entwickelt und gefertigt werden. • Grundkenntnisse der Softwareentwicklung für Fahrzeugelektronik.
Inhalt:
• Elektronische Komponenten von Fahrzeugsystemen (Sensoren, Steuergeräte), • Mechatronische Fahrzeugkomponenten (elektromechanische und –hydraulische Aktuatoren) • Fahrzeugkommunikationssysteme (CAN-Bus, TTP, Flexray,..), • Fahrerassistenzsysteme u. Schlupfregelsysteme (ABS, TCS, ESP, ACC), • Drive-by-Wire Anwendungen (Brake-by-Wire, Steer-by-Wire) • Softwarearchitekturen und Betriebssysteme (OOA, AUTOSAR, OSEK). • Sicheres Kodieren in C/C++ (MISRA) • Softwareentwicklungsprozesse (SPICE, CMMI) • Sicherheitsanforderungen nach ISO26262 und deren Einfluss auf die Entwicklung von Fahrzeugsystemen
39
Mechatronik Modulhandbuch
Fahrzeugintegration und -test Modulkürzel: MT_FIT SPO-Nr.: 24.4
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 6
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 7 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 105 h Gesamtaufwand: 175 h
Lehrveranstaltungen des Moduls:
24.4.1 Fahrzeugintegration und -test (MT_FIT) 24.4.2 Praktikum Fahrzeugintegration und -test (MT_FITP)
Lehrformen des Moduls: MT_FIT: SU/Ü - seminaristischer Unterricht/Übung MT_FITP: Pr - Praktikum
Prüfungsleistungen: MT_FIT: schrP90 - schriftliche Prüfung, 90 Minuten (100%) MT_FITP: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Grundverständnis für den Entwicklungsprozess mechatronischer Fahrzeugsysteme speziell im Hinblick auf Methoden für Fahrzeugintegration und –test
• Grundverständnis für den Einfluss der Fahrzeugumgebung auf das Verhalten mechatronischer Systeme • Fähigkeit zur Erarbeitung einer Testspezifikation • Fähigkeit zur Entwicklung spezifischer Tests • Systematische Vorgehensweise zur Erkennung und Überprüfung von möglichen Systemfehlern und –
schwächen im Feld • Fähigkeit zur Durchführung von (Fahrzeug-)Tests zur Überprüfung des Systemverhaltens
Inhalt:
• Grundlagen des Entwicklungsprozesses für mechatronische Fahrzeugsysteme und Methoden für Fahrzeu-gintegration und –test
• Methoden zur Erkennung von möglichen Systemfehlern und –schwächen (FMEA, FTA) • Simulation und Entwicklung einer Testspezifikation • Rapid Prototyping • Systemtest • Hardware-in-the-Loop Test • Rollenprüfstände und Hallentests • Fahrzeugerprobung auf der Teststrecke • Veranschaulichung des Prozesses anhand einiger ausgewählter Beispiele
40
Mechatronik Modulhandbuch
2.2.3 Module des Schwerpunktes Produktionsmechatronik
Produktionstechnik und Prozesse Modulkürzel: MT_PP SPO-Nr.: 25.1
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Fachwissenschaftli-ches Wahlpflichtfach
5
Modulverantwortliche(r): Prof. Dr. Gordon Elger
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Produktionstechnik und Prozesse
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Kenntnis der Fertigungsprozesse in der Massen- und Einzelfertigung • Grundlagen und Methoden zur Fertigung mechanischer, elektrischer und elektronischer Erzeugnisse • Fähigkeit zur Analyse und Optimierung von Produktionsprozessen • Fähigkeit zur Planung und Bewertung von Produktionssysteme
Inhalt:
• Grundlagen der Fertigungstechnik an ausgesuchten Fertigungsverfahren • Grundlagen der Elektronikfertigung (Bauteilfertigung, SMD Linie) • Prozesstechnologie (Analyse, Kontrolle, Steuerung, Design of Experiment, Optimierung) • Einführung zu Montagesystemen, Robotern und Greifern • Grundlagen der Zeit- und Arbeitswirtschaft (Industrial Engineering) • Produktionssysteme für die Massen- und Einzelfertigung • Grundlagen der Produktionsplanung und Steuerung
41
Mechatronik Modulhandbuch
Industrielle Bildverarbeitung Modulkürzel: MT_IBV SPO-Nr.: 25.2
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr. Georg Passig
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Industrielle Bildverarbeitung
Lehrformen des Moduls: SU - seminaristischer Unterricht
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Verständnis grundlegender Methoden zur Verarbeitung und Analyse digitaler Bilder und der geometri-schen Zusammenhänge bei der perspektivischen Abbildung..
• Kenntnis wichtiger Bildanalyseschritte und –methoden • Kamerakalibrierung und 3D-Rekonstruktion • Praktische Erfahrung in der Bildverarbeitung und die Fähigkeit, anhand einer bestimmten Fragestellung
geeignete Verfahren auszuwählen und mit Hilfe von Entwicklungswerkzeugen zu implementieren.
Inhalt:
• Eigenschaften digitaler Bilder: Wertebereich, Farbraum, Rauschen, Histogramm • Vorverarbeitung: Kontraststreckung, Farbraumtransformationen, affine Abbildungen, Fouriertransforma-
tion, Faltung • Filter: Gaussfilter, Tiefpass-, Hochpassfilter, Medianfilter, Kantenfilter, Houghtransformation, Interpola-
tion • Kanten und Konturen, Bildsegmentierung, Regionenmorphologie • Merkmale: Textur, Entropie, Rotations- und skalierungsinvarianz, • Klassifikatoren, Template matching, Optischer Fluß • Kamerakalibrierung, Epipolargeometrie, Stereo, 3D matching • praktische Übungen mit typischen Anwendungen aus der Robotik, Materialprüfung und Medizin
42
Mechatronik Modulhandbuch
Robotik Modulkürzel: MT_RO SPO-Nr.: 25.3
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr.-Ing. Ulrich Schmidt
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 5 ECTS / 4 SWS
Arbeitsaufwand: Kontaktstunden: 47 h Selbststudium: 78 h Gesamtaufwand: 125 h
Lehrveranstaltungen des Moduls:
Robotik
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung
Prüfungsleistungen: schrP90 - schriftliche Prüfung, 90 Minuten
Angestrebte Lernergebnisse:
• Fähigkeit zur mathematischen Beschreibung von Robotern • Fähigkeit zur Transformation von Welt- in Gelenkkoordinaten • Fähigkeit zur Berechnung von Bahnbewegungen • Fähigkeit zur Berechnung der Gelenkkräfte und –momente • Fähigkeit zur Simulation von Roboterbewegungen
Inhalt:
• Freiheitsgrade starrer Körper (Lage, Orientierung) • Beschreibung von Robotergliedern durch DH-Parameter • Beschreibung kinematischer Ketten durch homogene Transformationsmatrizen und Quaternionen • Direkte und inverse Kinematik von Robotern • Bahnkurven (Point-to-point, Continuous Path) • Robotersimulation • Roboterprogrammierung
43
Mechatronik Modulhandbuch
Automatisierungstechnik Modulkürzel: MT_AT SPO-Nr.: 25.4
Zuordnung zum Curricu-lum:
Studiengang u. -richtung Art des Moduls Studiensemester
Mechatronik Pflichtfach 5
Modulverantwortliche(r): Prof. Dr. Johann Schweiger
Unterrichtsprache: Deutsch
Leistungspunkte / SWS: 7 ECTS / 6 SWS
Arbeitsaufwand: Kontaktstunden: 70 h Selbststudium: 105 h Gesamtaufwand: 175 h
Lehrveranstaltungen des Moduls:
25.4.1 Automatisierungstechnik 25.4.2 Praktikum Automatisierungstechnik
Lehrformen des Moduls: SU/Ü - seminaristischer Unterricht/Übung Pr - Praktikum
Prüfungsleistungen: SU/Ü: schrP90 - schriftliche Prüfung, 90 Minuten (100%) P: LN - ohne/mit Erfolg teilgenommen (0%)
Angestrebte Lernergebnisse:
• Die Studenten wissen, wie man einen Produktionsvorgang mit Hilfe von automatisierungstechnischen Komponenten steuern kann.
• Sie verstehen die speziellen Konzepte zur echtzeitfähigen Programmierung robuster Steuerungsalgorith-men.
• Die Studenten können standardisierte Steuerungskomponenten für praktische Aufgabenstellungen ein-setzen.
• Sie sind in der Lage, Produktionsvorgänge im Hinblick auf die informationstechnische Steuerung zu unter-suchen.
• Aus den Analysen können sie Algorithmen zur Implementierung der Steuerungslogik ableiten. • Die Studenten sind in der Lage, informationstechnische Steuerungskonzepte hinsichtlich Echtzeitfähig-
keit, Robustheit und Wiederverwendbarkeit zu bewerten.
Inhalt:
• Automatisierungstechnische Komponenten • Identifikationssysteme • Programmierkonzepte für Echtzeitsysteme • SPS-Programmierung • Zellensteuerung und Prozessleitsysteme • Produktionsplanungs- und Steuerungssysteme • Mensch-Maschine-Schnittstellen • Sensordatenverarbeitung • Sicherheitsaspekte der Automatisierungstechnik
44