metering of two-phase geothermal wells using pressure pulse technology
DESCRIPTION
Lukasz Piwoda - Two phase wellsTRANSCRIPT

Lukasz Piwoda
Metering of Two-Phase Geothermal Wells Using Pressure Pulse Technology
Diploma Thesis Norwegian University of Science and Technology
Department of Petroleum Engineering and Applied Geophysics
July 2003

Acknowledgement __________________________________________________________________________
i
I wish to thank Professor Jon Steinar Gudmundsson for being my supervisor. I am grateful
for his enthusiasm, an ocean of suggestions, and excellent supervision throughout this work.
Thanks for my supervisor in Poland Dr. Ing. Czeslaw Rybicki to recommend me for
“Erasmus Link to Norway” scholarship and his efforts to enable my take on the study at
NTNU. I am thankful to ING AG Leipzig and Norwegian University of Science and
Technology for financing my scholarship. I wish to thank Mr Wolfgang Laschet from Office
of International Relations for his help to organize my stay in Norway. I also want thank to
Professor Danuta Bielewicz and Professor Jan Falkus for their efforts and engagements into
international cooperation between universities, and for their appreciate help to surmount the
official adversity.
In addition I want to thank Jon Rønnevig, Kjell Korsan and Harald Celius from Markland AS,
for their guidance into the computer simulations and suggestions towards the obtained results.

List of Contents __________________________________________________________________________
ii
List of contents Acknowledgement …………………………………………………………………………….i List of contents ………………………………………………………….……………………ii Nomenclature…………….……………………………………………………………………v Abstract……………………………………………………………………………………..…1 Introduction …………….……………………………………………………………………..2 1. Metering of Multiphase Wells 3
1.1 Introduction………………………………………………………………………….....5 1.2 Overview of multiphase metering……………………………………….......................5 1.3 Challenges and accuracy…...……………………………………….…………...…......7 1.4 Metering techniques…...…………………..………………………….……………......9 1.5 MFMs Projects…...………………………………………………….……………......12
2. Pressure Pulse Technology 13
2.1 Pressure Pulse method…...……………………………………...……………...…......14 2.2 Water-hammer effect…...…………………………………………………...…….......14 2.3 Theory and equation…...……………………………………...…………...….............15 2.4 Pressure surge in wellbores…...…………………………………...…………...…......16 2.5 Mass and volume flowrates…………………...............................................................17 2.6 Flow condition analysis……………………………..……………………...................19 2.7 Concluding remarks……………………………............………………......................20
3. Geothermal Applications 27
3.1. Geothermal energy……………………………...…………...………….....................28 3.2 Geothermal well flow……………………………........................................................29 3.3 Well performance ……………………….....................................................................32
4. Multi-phase Flow in Wells 37
4.1. Introduction………………………………………………………………………..…38 4.2. Main difficulties………………………………………………….…………………. 38 4.3. Phase behaviour……………………………………………………………………... 39 4.4. Definition and variables…………………………………………………………….. 42 4.5 Fluid properties…………………………………………………………………....… 44 4.6. Flow patterns………………………………………………………………………... 44 4.7. Pressure gradient……………………………………………………………………..47 4.8. Multiphase flow models……………………………………….……………………..48 4.9. Duns and Ros correlation for multiphase flow in oil wells…………………………..51 4.10. Duns and Ros modifications………………………………………………………..51 4.11. Orkiszewski correlation for multiphase flow in geothermal wells……………..…..52

List of Contents __________________________________________________________________________
iii
5. Sped of Sound in Two-Phase Mixtures 54
5.1 Introduction…………………………………………………………………………… 55 5.2 Compressibility of two-phase mixtures……………………………….……………… 55 5.3 Compressibility of steam-water system……………………………………………… 57 5.4 Acoustic velocity models …………………………………………………………..… 62 5.5 Attenuation mechanisms of sound wave……………………………………………… 66 5.6. Concluding remarks……………………………………………………………….… 68
6. Case studies 74
6.1 Calculation purpose……………………………………………………………………75 6.2 Water-hammer and line packing in oil wells…………………………………..………75 6.3 Water-hammer and line packing in geothermal well…………………………………106
7. Discussion 156
7.1 Multiphase flow correlations………………………………………………...……… 157 7.2 Acoustic velocity profile………………………………………...……………………158 7.3 Line packing………………………………………………………………………… 159 7.4 Size of the pressure pulse…………………………………………………………..…161
8. Conclusions 162 9. References 164 Appendix A – Multiphase Metering Projects 174 Appendix B – Duns and Ros, Orkiszewski - Multiphase Flow Correlations 183
B.1 Duns and Ross Correlation…………………………………………………..…….…184 B.2 Orkiszewski Correlation……………………………………………………………...192
Appendix C – Sound Wave Propagation Process in Steam Water Mixture 195 Appendix D – PipeSim 2000-Multiphase Flow Simulator 198
D.1 PipeSim Well Performance Analyses……………………………………………….199 D.1.1. Fluid Properties Correlations…………………………………………….…..199 D.1.2 Advanced calibration data………………………………………………..…..203
D.2 Profile model………………………………………………………………..………205 D.2.1. Detailed model………………………………………………………………205 D.2.2. Simplified model………………………………………………….…………206
D.3 IPR Data………………………………………………………………………….…207D.4 Matching option……………………………………………………………….……208D.5 VLP correlations and applications……………………………………………….…210

List of Contents __________________________________________________________________________
iv
Appendix E – HOLA 3.1-Multiphase Flow Simulator 213
E.1 Introduction………………………………………………………………………....215 E.2 Governing equations …………………………………………………………….…215 E.3 The computational models of HOLA 3.1……………………………………..……218 E.4 Heat loss parameters…………………………………………………………..……218 E.5 Wellbore geometry…………………………………………………………………219 E.6 Feedzone properties……………………………………………………………...…220 E.7 Velocities of individual phases…………………………………………………..…221 E.8 Productivity Index estimation………………………………………………………222
Appendix F – Simulation results in oil wells 226
F.1 Well A1…………………………………………………………………..…………227 F.2 Well A2………………………………………………………………………..…....234 F.3 Well B………………………………………………………………………………240 F.4 Well C……………………………………………………..………………………..246
Appendix G – Simulation results in geothermal wells 252
G.1 Well D1…………………………………………………………………..………...253 G.2 Well D2…………………………………………………………………..………...256 G.3 Well E1……………………………………………………………………..……....259 G.4 Well E2……………………………………………………………………..……....262 G.5 Well F1………………………………………………………………………..…....265 G.6 Well F2…………………………………………………………………………......268

Nomenclature __________________________________________________________________________
v
a – acoustic velocity
A –cross section area
B – volume factor
Cp – specific heat capacity at constant pressure
CV – specific heat capacity at constant volume
d – diameter
f – friction factor
g - absolute gravity
h – enthalpy
H – liquid holdup
ID – inner diameter
k – permeability
K – slip ratio
KS – isentropic compressibility
KT – isothermal compressibility
L – length
m –mass flow rates
p – pressure
PI – productivity index
q – volumetric flow rates
R – individual gas constant
Re – Reynolds number
RS – solution gas-oil ratio Sm3 gas/ Sm3 oil
S – entropy
t – time
T – temperature
u – velocity
WC - water cut
V – volume
x – mass fraction
z - direction opposite to gravity

Nomenclature __________________________________________________________________________
vi
Greek letters:
α – void fraction
β – water-oil volumetric factor
γ – specific heats ratio
µ – dynamic viscosity
v – specific volume
ρ – density

Abstract __________________________________________________________________________
1
Multiphase flow measurement is of vital importance in petroleum and geothermal industry.
Overview of currently available metering techniques has been made in present work. Pressure
Pulse method is a new developed method which propose a different approach to measure
two-phase flow in wells. The pressure effects after rapid valve closure that built up the
method were illustrated. The inspection of the types of geothermal reservoirs allowed
characterizing typical parameters of high enthalpy geothermal well. The difficulties to predict
the multiphase flow in wells are presented together with description of the definitions and
variables that need to be calculated. Multiphase flow models were examined and two most
appropriate correlations have been selected for oil and geothermal wells. The speed of sound
in two-phase mixtures was calculated. The available models to estimate acoustic velocity
were studied and verified with respect to their limitations. The compressibility of steam-water
system under the well flow conditions, required for calculations was derived from
thermodynamics definitions. The simulations were performed in PipeSim 2000 and HOLA
3.1 programs for oil and geothermal wells respectively, in order to demonstrate the Pressure
Pulse method. The case studies include three different North Sea oil wells and likewise three
typical high enthalpy geothermal wells. Inflow performance and tubing performance
calculations allowed extending the calculation for different diameters and flowrates. The
results are presented in form of the tables and plots. Obtained results for oil and geothermal
cases were compared to each other. All parameters that affect the acceleration pressure
(pressure increase after rapid valve closure) and pressure built up in wells are discussed. The
work ends with conclusions towards the performed calculations and gives the assessment for
possible application of the Pressure Pulse method to meter the flow in two-phase geothermal
wells.

Introduction __________________________________________________________________________
2
Pipe-flow mixtures of crude oil, gas and water are common in petroleum industry, and yet
their measurements nearly always present difficulties. The traditional solution is first to
separate the components of the flow, and then measure the flow rate of each component using
conventional single-phase flow meters. This method is both inconvenient and expensive to
use for well monitoring. In addition the separation is not accurate, about 10% (Millington,
1999). Current multiphase meters have similar accuracy, they employ the complex techniques,
and some of them contain the dangerous radioactive materials as discussed in Chapter 1.
In geothermal wells producing steam and water mixture under various operating conditions
the capability accurately measure the flow is also of value importance for several reasons
similar to petroleum industry. These are general evaluation of the geothermal reservoir under
proper reservoir management, optimalisation of the wellbore design from well deliverability
considerations and minimization of scale deposits in the wellbore (Ragnarsson, 2000).
The background for this thesis work is a new method to measure multiphase follow
(Gudmundsson and Falk, 1999; Gudmundsson and Celius, 1999), developed at Norwegian
University of Science and Technology (NTNU). The metering method is simple, requires
little space, and is cost effective with at least the same accuracy as the competitors
(Gudmundsson and Celius, 1999). The multiphase flow meter is based on measurements of
pressure magnitude and pressure build-up. The output is velocity and density of the gas-
liquid flow.
This thesis work concerns multiphase metering, specifically pressure transients caused by a
rapid valve closure in oil and geothermal wells. Pressure propagation in fluids is closely
related to sound velocity. The acoustic velocity in two phase mixtures varies significantly
from this in single liquid or gaseous phase, and depends on physical properties of every
mixture constituents. Available models for acoustic velocity in two-phase mixtures need to be
verified according to their limitations in order to find the most appropriate for particular
calculations.

Introduction __________________________________________________________________________
3
Multiphase flow is a complex, turbulent and highly nonlinear process, which can not be fully
described mathematically due to increased numbers of flow parameters. Computer
simulations base on semi-empirical correlations were developed in order to predict the
pressure and fluid parameters changes across the wellbore.
Calculating flowing pressure profiles in oil wells, phase transfer between oil and gas requires
a rather simple treatment, and is accomplished trough the use of solution gas-oil ratio – Rs
relationship. In geothermal wells, however phase transfer between water and steam attains
critical importance and calculations must incorporate the steam tables accurately. Pressure
profile calculations for geothermal wells vary from those for oil well in another important
aspect in that the temperature of the fluid must be computed precisely.
This thesis describes how the Pressure Pulse method can be used to meter the flow in high
enthalpy two-phase steam-water geothermal wells similarly to oil wells. The calculations
performed aim to estimate the size of pressure pulse after the valve closure and determine the
parameters affecting the early pressure build-up.

Chapter 1
Metering of Multiphase Wells

1. Metering of Multiphase Wells __________________________________________________________________________
5
1.1 Introduction
Multiphase means a single component existing in a variety of phases such as steam, water
and ice. In the oil industry multiphase refers to a stream of fluid containing a liquid
hydrocarbon phase (crude or condensate), a gaseous phase (natural gas, and non hydrocarbon
gases), a produced water phase, and solids phase (sand, wax, or hydrates). In general the
quantities of solids produced are minimal and thus have less impact than the liquid and gas
phases. In present thesis work some simplification will be made and two phase, liquid phase
and gas phase will be considered. The mixture of two immiscible fluids will be termed as
liquid phase, regardless to components number. The mixture of gases flowing together will
usually, unless there is a large density difference and little turbulence, diffuse together and
can be treated as single homogenous phase (McNeil, 1990).
Multiphase measurement is the measurement of the liquid and gas phases in a production
stream without the benefit of prior separation of the phases before entering the meter.
1.2 Overview of multiphase metering
While two-phase and multiphase flows have been common throughout petroleum industry for
many years, there has until very recently been little or no demand for real-time metering of
such flows. Traditionally the problem was circumvented by separating the flow into its
constituent components, which allowed straightforward single phase metering techniques to
be used (Theuveny et al., 2001). This approach was very practical and effective, but did give
rise to processing systems which were quite inflexible in terms of their capability to handle
fluctuating flowrates, varying water contents, and changes in the physical properties of
production fluids. However in the early years of offshore North Sea production this was not a
major problem, and at that time - pre 1980 - there was little or no impetus to develop more
sophisticated metering technology that could perhaps dispense with separation equipment and
expensive metering facilities (Falcone et al., 2002).

1. Metering of Multiphase Wells __________________________________________________________________________
6
During the 1980s the process of gradually declining oil production from the major North Sea
fields started, so in the interests of operational cost effectiveness, there was a move to use
existing platform based process plant for other production roles (Steward, 2003). To maintain
production levels, smaller satellite fields which were previously uneconomic to produce on a
stand alone basis, were tied back to existing platform based infrastructure.
From a technological point of view this introduced a step change in the complexity of
production. There were now numerous fields, typically with quite different oil properties,
water contents and gas fractions, all being produced through process plant designed for the
early years of single-well production (Theuveny et al., 2001). Furthermore, the water
contents and gas fractions started to increase, and this exacerbated the production problems
even further. It began to emerge quite quickly that more operationally flexible multiphase
technologies were going to be needed, if not immediately, certainly within five to ten years
(Steward, 2003). For existing platforms the prime purpose of this new technology would be
to improve processing flexibility, and for new field developments the aim would be to
completely eliminate the need for costly and bulky platform based process plant (Falcone et
al., 2002). The ultimate aim was of course to move towards remote subsea instrumentation.
The key driver at all times being lower production costs through reduced initial capital
expenditure, and reduced operating manpower.
To take up these challenges, the growth in multiphase research and development since the
early 1980s has been exponential, especially with regard to metering, and today there are a
variety of multiphase flowmeter (MFM) installed onshore and offshore. It appears to be no
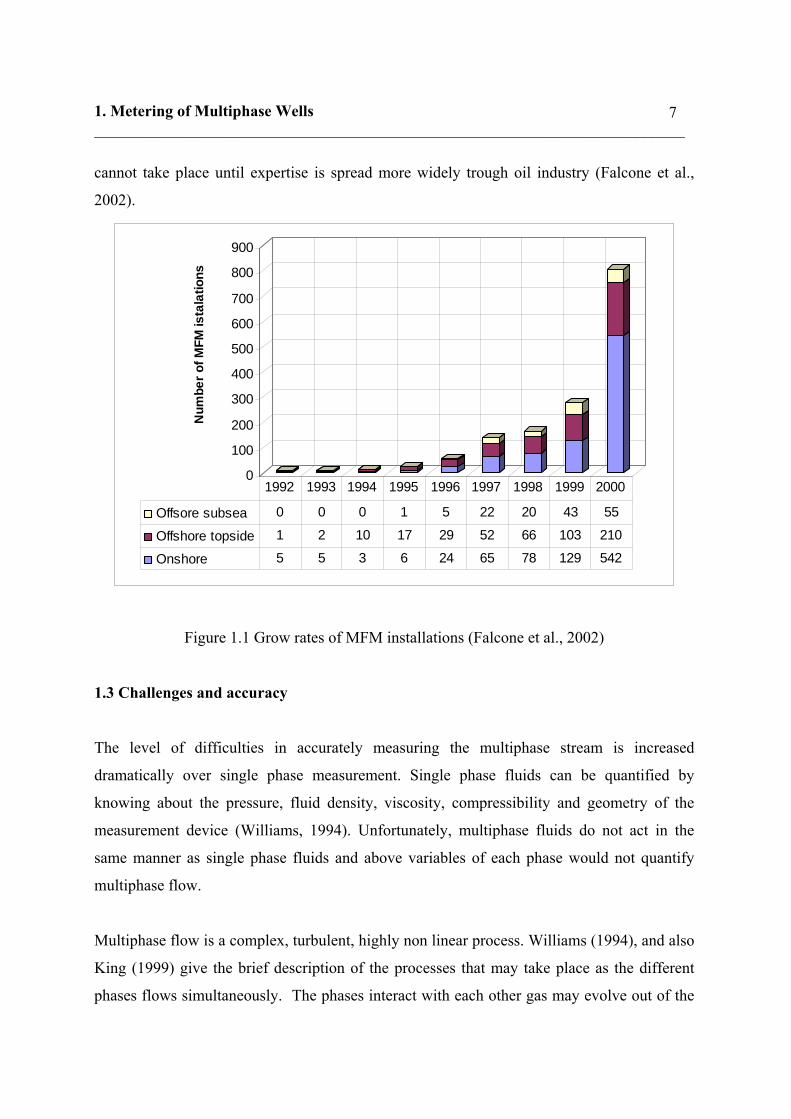
reduction in new metering developments (Steward, 2003). However the actual growth rate of
installations has been lower than initial industry forecast suggested (Falcone et al., 2002). Oil
companies have been hesitant to invest in expense meters with limited tracks record. Figure
1.1 shows actual trend up, tied with very low level of utilisation MFM technology before the
2000. The reasons may be the fact that when operators decide between a traditional approach
to the production facilities and one including MFM, must compare the capital and operating
expenses of each solution. Very little operational history of MFM cause difficult to predict
the operating costs (Jamieson, 1999). This difficulty results from relatively low number of
MFM applications worldwide, allow claiming that widespread implementation of MFM
1. Metering of Multiphase Wells __________________________________________________________________________
7
cannot take place until expertise is spread more widely trough oil industry (Falcone et al.,
2002).
0
100
200
300
400
500
600
700
800
900
Num
ber o
f MFM
ista
latio
ns
Offsore subsea 0 0 0 1 5 22 20 43 55
Offshore topside 1 2 10 17 29 52 66 103 210
Onshore 5 5 3 6 24 65 78 129 542
1992 1993 1994 1995 1996 1997 1998 1999 2000
Figure 1.1 Grow rates of MFM installations (Falcone et al., 2002)
1.3 Challenges and accuracy
The level of difficulties in accurately measuring the multiphase stream is increased
dramatically over single phase measurement. Single phase fluids can be quantified by
knowing about the pressure, fluid density, viscosity, compressibility and geometry of the
measurement device (Williams, 1994). Unfortunately, multiphase fluids do not act in the
same manner as single phase fluids and above variables of each phase would not quantify
multiphase flow.
Multiphase flow is a complex, turbulent, highly non linear process. Williams (1994), and also
King (1999) give the brief description of the processes that may take place as the different
phases flows simultaneously. The phases interact with each other gas may evolve out of the

1. Metering of Multiphase Wells __________________________________________________________________________
8
solution, or is absorbed into the liquid, waxes and hydrates may precipitate etc. If the single
component exists in the two phases there is significant mass transfer and thus mixture quality
may be considered variable. The components do not mix homogenously, and tend to remain
separate, the water does not mix well with the oil, and gas remains separate from the liquid
phase. Both phases flow at the different velocities. It is common for gas and liquid to flow at
the different rates. Very complex flow regimes can exist and are dependent on the relative
velocity of the phases, fluid properties, pipe configuration and flow orientation. The
mentioned above and other relevant to the multiphase flow parameters are described in
Chapter 4, which deals with multiphase flow in wells. The parameters definitions and
relationship between them are given together with the correlations developed in order to
predict the flow behaviour.
Expectations of MFM performance in the early days were concluded and sometimes in the
fiscal range of accuracy. Such levels of accuracy were, and never will be achievable by
present technology (Steward, 2003). Over the last ten years, a gradually more realistic
assessment of uncertainty capabilities has evolved. To date, no international regulations for
MFM accuracy has been delivered. Varying level of accuracy requirements exists in
multiphase measurement depend on how the information will be utilized. Essentially, three
main accuracy requirements exist for metering multiphase fluids (Falcone et al., 2002):
- approximately 5 -10% for reservoir management,
- approximately 2-5% for production allocation,
- and approximately 0.25-1% for fiscal metering, are anticipated to be required.
However because of high complexity of multiphase mixtures it may be optimistic to claim
that the above ranges of accuracy apply to any regime and for any chemistry of the fluids.

1. Metering of Multiphase Wells __________________________________________________________________________
9
1.4 Metering Techniques
Under the multiphase flow circumstances the following parameters are required to compute
flowrates of each phase:
- the cross-sectional area of the pipe occupied by each phase
- the axial velocity of each phase
- density of each phase.
The cross-section area and phase velocities give the volumetric phase flowrates. The product
of phase densities and phase volumetric flowrates gives the phase mass flow rate.
Unfortunately, at the present time there is no method of measuring phase fraction directly,
they are derived from two independent measurements, coupled with the continuity equation
which requires the sum of oil water and gas phase fraction to equal unity. Typically, two
variables independent are the density of the entire flow, and the water content in the liquid
phase. Once these are measured, some simple mathematical analysis allows the individual
phase fractions to be calculated.
With these technology limitations, projects aimed at developing multiphase meters have
tended to adopt one of two metering strategies (Millington 1999):
- A set of sensors that take volume measurements, which when combined are capable
of isolating the individual phase fractions. A combination of flow models and velocity
measurements are used to derive the phase velocities as functions of time. To determine
densities, temperature and pressure are measured and assumed equal in all phases.
- A set of sensors which again take volume measurements, but which also require flow
to be conditioned such that only one mixture velocity measured is assumed to be required .
The overall mixture density is considered representative of the three individual phases. Phase
fraction data is required as above.

1. Metering of Multiphase Wells __________________________________________________________________________
10
Following sensors and techniques are commonly used:
Gamma Densitometers – consist of radioactive source and detector, placed so that the beam
passes trough the flow and is monitored on the opposite side of the multiphase mixture. The
amount of radiation that is absorbed or scattered by the fluid is a function of both fluid
density and energy level of the source. Typical radioactive sources used include isotopes of
caesium, barium or americium. Single energy gamma sensors are those that incorporate only
one source or monitor only one energy level from source. These devices are often used to
measure the density of the multiphase mixture. Dual energy gamma sensors measure the
absorption of two separate energy levels. The two energy levels are provided either by two
isotopes or by a single isotope that has two discernible levels. If two energy levels are far
enough apart, these two independent absorption measurements can be used to determine the
oil, gas, and water phase volume fractions. The densitometers are frequently calibrated by
filling the device with known fluids, typically gas (or empty pipe) and water.
Capacitance Sensors – measure the dielectric properties of fluid. Each sensor consists of a
pair of metal plates or electrodes. These are mounted on the pipe wall or are otherwise
located so that the fluid occupies the space between them. The capacitance of the fluid is
measured by varying the voltage difference between the plates and measuring the resulting
electric current between them. From the capacitance, the dielectric constant of the mixture
can be calculated. Since the dielectric constant of the mixture is a known function of the
composition, this information can be used to calculate the volume fractions of oil, gas, and
water phases. This technique will work for mixtures in which the liquid (oil/water mix) is oil
continuous. Since the water phase is a much better conductor of electricity, water continuous
mixtures will effectively "short" the capacitance plates rendering the measurement ineffective.
For water continuous liquids, an approach based on conductance is used (see below).
Conductance / Inductance Sensors – use an electrical coil around the pipe to induce a current
in the flowing multiphase mixture. The magnitude of this induced current is related to the
dielectric constant of the mixture, which can be used to determine the (mixture composition
as with the capacitance and microwave sensors.

1. Metering of Multiphase Wells __________________________________________________________________________
11
Microwave Sensors – measure the dielectric properties to help determine the phase fractions
of the multiphase mixture. The sensor consists of emitters and receivers (antennae) of
electromagnetic waves in the MHz or GHz range (microwaves). The dielectric constant of the
mixture is a function of both the frequency of the waves and the mixture conductivity. The
measured dielectric constant is a volume weighted average of the individual phase dielectric
constants. The conductivity and dielectric constant of the water phase is a function of salinity.
As such, meters that use this technique either need brine salinity as a calibration variable or
have some other way of estimating it on-line.
Cross Correlation Techniques – use two similar measurements, each in a different axial
location in the pipe. By comparing the two measurements, the velocity of the flow feature is
determined, for example, the time required for a bubble to travel between the two sensors.
Implicit in this technique is a measurable amount of non-homogeneity in the multi phase flow.
For this reason, many available meters require the Gas Volume Flow (GVF) to be within
certain limits, far enough from the pure liquid (GVF = 0) and pure gas limits (GVF = l) that
the flow does not appear homogeneous to the sensors. Gamma densitometers, microwave
sensors, and capacitance sensors are used in MPM systems for cross correlation.
Venturi Meters – consist of a gradual restriction in the flow path, followed by a gradual
enlargement. For single phase flows, the pressure drop across the restriction is a
straightforward function of the velocity and density of the fluid. For multiphase flows, the
analysis is more complicated. The gradual restriction in the flow path makes the Venturi
meter slightly intrusive to the flow.
Positive Displacement Meters (PD) – rely on the metered fluid to rotate mechanical gears or
rotors in the flow path. Each rotation of the rotor corresponds to a known amount of volume
passing through the meter. PD meters are commonly used in single phase service. For full
well stream production, risks due to erosion and blockage should be considered.

1. Metering of Multiphase Wells __________________________________________________________________________
12
1.5 MFMs Projects
A very limited amount of information is available on MFMs performance. In the oil and gas
sector where competition is always intense a “black box” MFMs packages are usually offered,
where very little is unveiled. A brief description of some MFMs projects that are now
commercially available is given in Appendix A, together with the tables containing
comparison of the methods with regard to the techniques that are used for measurement
purposes.

Chapter 2
Pressure Pulse Technology

2. Pressure Pulse Technology __________________________________________________________________________
14
2.1 Pressure Pulse method
Multiphase metering in oilfield operation is of considerable interest in petroleum industry as
described in Chapter 1. As the response for these needs new method called Pressure-Pulse
has been developed at NTNU by Professor Gudmundsson. The method is based on the
propagation properties of pressure waves in gas-liquid media. Waves generated in gas-liquid
mixture flowing in a pipe at a speed of sound will propagate as pressure pulses
(Gudmundsson and Celius, 1999). These effects called water-hammer and line packing are
described precisely below. The method has been tested in several offshore platforms
including Gullfalks A, Gullfalks B, and Oseberg B, with positive repeatable results similar to
the theoretical models (Gudmundsson, Falk, 1999). Total of 800 tests were run on 12
different gravel packed wells. No negative effects were observed on the production system or
the reservoir during the 11-month test period. The method has the advantage of being simple,
low-cost, and gives the same accuracy as the competitors (Gudmundsson and Celius, 1999).
Pressure is the easiest parameter to measure in the production of oil and gas. It can be
measured in pipelines, flowlines and wellbores; at wellhead, chokes, manifolds, and
separators. The widespread use of the quick acting valves in the oil industry to open, close,
and control pipeline and wellbore flow, has made it possible to harness the information
contained in the rapid pressure transients when a valve is activated (Gudmundsson et al.,
2002).
2.2 Water-hammer effect
The water-hammer effect can be caused by a rapid closure a valve in pipe line with flowing
liquid. The immediate pressure increase created by the valve is referred as the acceleration
pressure-pulse ∆pa. Wylie and Streeter (1993) described how this increase in pressure travels
in the pipe with the velocity of sound, and stop the flow as it passes. The instant the valve is
closed, the fluid immediately adjacent to it is brought to rest by the impulse of the higher
pressure developed at the face of the valve. As soon as the first layer is stopped, the same
action is applied to the next layer of fluid bringing it to rest. In this manner a pulse wave of

2. Pressure Pulse Technology __________________________________________________________________________
15
high pressure is visualised as travelling upstream at same sonic velocity. However in long
pipe flows with high frictional pressure loss the accelerational pressure-transient is attenuated
and does not stop the flow completely. Yet, since the fluid must stop by the valve, there is a
continuous pressure increase near the valve also after is wholly closed. The name of these
phenomena is line packing. Figure 2.1 illustrates the water-hammer effect.
2.3 Theory and equation
Water-hammer phenomena, line packing and pressure pulse velocities are essential for the
new multiphase method. Water-hammer pressure transient can be found using homogenous
continuity equation at high pressure well conditions fluids are well mixed and thus
homogenous continuity equation can be applied (Falk, 1999).
Continuity equation
02 =∂∂
+∂∂
⋅+∂∂
xpu
xua
tp ρ (2.1)
The equation may be rewritten in form
02 =∂∂
∂∂⋅+
∂∂
∂∂
⋅+∂∂
xt
tpu
xt
tua
tp ρ (2.2)
The characteristic pressure pulse velocity running upstream the valve is uatx
−=∂∂ .
Thus,
02
=∂∂
−+
∂∂
−⋅
+∂∂
tp
uau
tu
uaa
tp ρ (2.3)
tua
tp
∂∂
⋅−=∂∂
ρ (2.4)

2. Pressure Pulse Technology __________________________________________________________________________
16
During quick valve closure the velocity jump is ∆u = -u in a short period of time ∆t. The
water-hammer due this retardation is
uapa ⋅⋅=∆ ρ (2.5)
This equation is generally known in literature as Joukowski equation.
Momentum conservation principle is given as
dxdzg
duu
fxp
xuu
tu
⋅−⋅
⋅⋅=
∂∂
+∂∂⋅+
∂∂
21ρ
(2.6)
In steady-state turbulent pipe flow frictional pressure gradient is represented by Darcy-
Weisbach equation
2
2u
df
Lp f ⋅⋅
⋅=
∆ρ (2.7)
where, f is the dimensionless friction factor.
The frictional pressure gradient is made available to measure when the flow is brought to the
rest after valve closure. The line-packing pressure increase, in liquid-only flow represents the
pressure drop with distance in the pipeline. In two-phase flow line-packing is more
complicated and in addition to frictional pressure gradient it contains also increase in water-
hammer with upstream distance. In vertical gas-liquid wells pressure increase with depth and
hence the water-hammer changes with depth (Gudmundsson and Celius, 1999).
2.4 Pressure surge in wellbores
Using a high sampling rate and high resolution pressure gauge, pressure buildup is possible to
record. A typical pressure-pulse technology set up is shown in Figure 2.2. It contains a quick-

2. Pressure Pulse Technology __________________________________________________________________________
17
acting valve and two pressure transducers A and B upstream of the valve taking samples in
micro to mili seconds time period. Today technology can definitely provide such high
sampling gauges. A valve is termed quick-acting if it closes completely before waves are
reflected from up-stream or downstream. If there are reflections before valve is closed, the
pressure on closing will be affected (Gudmundsson and Falk, 1999). The example of
measured pressure from two transducers is shown on Figure 2.3. Pressure Pulse is measured
at two locations spaced 83.35m up-stream a quick acting valve. The speed of sound may be
estimated from cross correlation between the signals. In this example figure this is 170 m/s.
By knowing the mixture density, acoustic velocity for the mixture and pressure increase due
to acoustic term during a quick shut-in, mixture velocity may be calculated at the wellhead
(Gudmundsson, 1999). The studies of Khokhar (1994) suggest that the phenomena like
wellbore storage, skin effect, and phase redistribution that occur after the well shut have no
effect on the pressure technique. Whereas, the pressure-pulse method dependents more on
mixture composition and gas-liquid ratio of the well fluids which influence the acoustic
velocity. The speed of sound in two-phase mixtures, and its dependency on fluid properties
and PVT conditions will be investigated in Chapter 5 of this work. In the Pressure-Pulse
method the sound speed can be determined from cross-correlation of two pressure signals
from locations A and B, as indicated in Fig. 2.4. The testing of the Pressure-Pulse method on
several North Sea fields has resulted in measurements that make this possible (Gudmundsson,
Falk, 1999).
2.5 Mass and volume flowrates
The mass flowrate in a pipe of constant cross-sectional area can be obtained directly from the
Joukowski water-hammer equation, when the sound speed is also determined from cross-
correlation of the measured delay time between two signals from transducers A and B.
⎥⎦⎤
⎢⎣⎡⋅∆=
skg
aApm a (2.8)

2. Pressure Pulse Technology __________________________________________________________________________
18
The continuity principle dictates that the mass flow rate at the valve is the same as the mass
flow rate at other locations. Mixture density and the mixture velocity can be also obtained
from the measurements
⎥⎦⎤
⎢⎣⎡
∆⋅⋅⋅∆⋅⋅
= 32
2
2 mkg
padpLf
f
amixρ (2.9)
⎥⎦⎤
⎢⎣⎡
∆⋅⋅
∆⋅⋅⋅= 3
2mkg
pLfpad
va
fmix (2.10)
Knowing the density of individual phases of the fluid mixture, void fraction can be calculated
gL
mixL
ρρρρ
α−−
= (2.11)
Flow rates in petroleum industry are traditionally expressed in volumetric quantities.
The mass flowrate and the volumetric flowrate of the liquid are related trough relationship
⎥⎦
⎤⎢⎣
⎡=
sSmmq
3
ρ (2.12)
Treating about volumetric flow rates requires volumetric factor to be taken into consideration.
Volumetric factor B(p,T), indicates the effects of pressure and temperature changes, from
reservoir to stock-tank conditions. Thus, volumetric flowrates for oil can be calculated as
( ) ⎥⎦
⎤⎢⎣
⎡⋅=
sSmTpBTpq ooo
3
,),( ρ (2.13)
where oil density given by relationship

2. Pressure Pulse Technology __________________________________________________________________________
19
( ) ⎥⎦⎤
⎢⎣⎡⋅+
= 3,),(
),(mkg
TpBTpR
Tpo
sgoo
ρρρ (2.14)
The volumetric flowrates of gas
( ) ⎥⎦
⎤⎢⎣
⎡⋅=
sSmTpBqTpq ogg
3
,),( (2.15)
where gas volume can be also expressed as
( ) ( )[ ] ( ) ⎥⎦
⎤⎢⎣
⎡⋅−=
sSmTpBTpRGORqTpq gsog
3
,,, (2.16)
where:
),( TpR - amount of dissolved gas in oil ⎥⎦
⎤⎢⎣
⎡oilSmgasSm
3
3
GOR – gas oil ratio at standard conditions ⎥⎦
⎤⎢⎣
⎡3
3
mSm
If the oil produced contains water, also watercut WC [%] need to be known.
2.6 Flow condition analysis
The pressure profile in a pipeline can be used to detect and monitor solid deposits as shown
on Figure 2.5. Deposits will change the frictional pressure drop in the affected interval both
by change pipe roughness and by reducing the tubing diameter. This will show up as increase
in the line packing gradient in the affected region. When the valve is activated the pressure is
measured resulting in a pressure time log. The pressure - time log is then converted into
pressure - distance log. Those give the location and extend of the deposits in a pipeline.
Pressure Pulse testing can be also used in gas lift wells for flow rate metering and flow
conditions analysis. An examination of the line packing pressures makes it possible to
identify the location of gas injection points, and asses the status gas lift valves (Gudmundsson

2. Pressure Pulse Technology __________________________________________________________________________
20
et al., 2002). Figure 2.6 shows an example of the simulations for three different valve
locations.
The bubble point depth may be identified from line packing as it appears with the peak on the
time derivative plot. Figure 2.7 shows typical bubble point pressure response experienced
during the fields tests.
2.7 Concluding remarks
The water-hammer theory treats pressure-pulse propagation in single phase flow, and has also
been directly extended to multiphase flow. This theory is important for the new multiphase
meter. Multiphase flow models like the drift flux model, the homogenous model and certain
forms of the two-fluid models could predict pressure pulse. However, the assumptions of the
one pressure in the one-dimensional two-fluid model are not appropriate. This thesis uses the
homogenous model, where due to large pressure surge fluid homogeneity and continuity may
be assumed. The multiphase models are described in Chapter 4 of this work that treats about
multiphase flow in wells.

2. Pressure Pulse Technology __________________________________________________________________________
21
Figure 2.1 Water Hammer Effect
Figure 2.2 Pressure Pulse setup

2. Pressure Pulse Technology __________________________________________________________________________
22
Figure 2.3 Pressure Pulse measurements (Gudmundsson and Celius, 1999)

2. Pressure Pulse Technology __________________________________________________________________________
23
Figure 2.4 Pressure Pulse technology principles

2. Pressure Pulse Technology __________________________________________________________________________
24
Figure 2.5 Deposit appearances on line packing

2. Pressure Pulse Technology __________________________________________________________________________
25
Figure 2.6 Simulation results for three different valve locations (Gudmundsson et al, 2001)

2. Pressure Pulse Technology __________________________________________________________________________
26
Figure 2.7 Typical bubble point pressure response during the field tests.

Chapter 3
Geothermal Applications

3. Geothermal Applications __________________________________________________________________________
28
3.1 Geothermal energy
Geothermal energy is one of the cleaner forms of energy now available in commercial
quantities. The use of this alternative energy source, with low atmospheric emissions, has a
beneficial effect on our environment by displacing more polluting fossil and nuclear fuels.
Thermal energy carried in the produced fluid can be used for direct heating in residential,
agricultural, and industrial applications; or the thermal energy of higher temperature systems
can be used to produce electricity. Rapidly growing energy needs around the world will make
geothermal energy exceedingly important in several countries. For example in Iceland
provides 50% of the total power supply, and 86% energy used for space heating (Ragnarsson,
2000). The production of electricity requires a greater concentration of energy than other
applications. If hot fluid is available in great enough quantities, a geothermal power plant can
be installed that uses the produced steam directly to drive a turbine generator system.
Geopressured geothermal reservoirs are closely analogous to the geopressure oil and gas
reservoirs. Fluid caught in stratigraphic trap may be raised to litostratic pressure due to
overburden pressure. Such reservoirs are given fairly deep (over 2,000 m), so that the
geothermal gradient can give temperature over 100oC (Grand, 1982). A number of such
reservoirs have been found in drilling for oil and gas. These reservoirs derive their heat from
the terrestrial heat flux, and are widespread throughout the world. It occurred not economic
to exploit even the most favourable reservoirs for a long time, but over the last decade many
projects arise to utilise their energy (Dickson and Fanelli, 2001).
In some places over the world high temperature over 250 oC geothermal reservoirs occur.
That heat source may be either an abnormal high geothermal gradient or volcanism nature.
Those fields usually display surface activity when high temperature fluid systems transfer
heat to the surface from crustal rocks heated by magmas and are mainly located in six
countries: United States, Mexico, New Zealand, Philippines, Iceland and Italy
(Gudmundsson and Ambasth, 1986).

3. Geothermal Applications __________________________________________________________________________
29
3.2 Geothermal well flow
High temperature geothermal reservoirs can be liquid and vapour dominated this mean that
can have liquid only or steam-water feedzone (Gudmundsson, 1989). Steam dominated
reservoirs are relatively rare, and most geothermal fields are water-dominated, where liquid
water at high temperature, but also under high (hydrostatic) pressure, is the pressure-
controlling medium filling the fractured and porous rocks. When liquid water flows into a
geothermal well, the water will remain liquid up the wellbore until reaching a depth where
the pressure is equal to the saturation pressure. The pressure decreases as the water moves
toward the surface and at this depth the liquid water will start to flash to form a steam. It will
continue to flash until reaching the wellhead, surface pipeline, and eventually the steam
separator. Beginning with liquid water, the first flashing results in comparatively small
amounts of stream that flows as a bubbles trough a continuous column of water. With
pressure drop towards the surface more steam evaporates and thus flow changes the regime
into slug and steam continuous annular flow (Gudmundsson, 1989).
The two-phase output from geothermal wells is piped to a separator to produce steam for
electric power generation. The liquid water separated from the steam is disposed of at the
surface or injected back into the reservoir. Reinjection of the geothermal liquid back into
reservoir after use has a number of purposes. The most important ones being (Eliasson, 2001):
- disposal being use liquid without polluting the environment,
- sustenance of the reservoir pressure to counteract with drawn down and
surface subsidence,
- mining of heat stored in hot formations simultaneously extend the useful life
of the reservoir.
The most common approach for measuring flow rate similarly to the petroleum industry
where gas is separated from oil, in geothermal applications separator is also used, where
steam-water mixture is separated into a flow of water and steam at the pressure of separator.
The flow of each phase can be then measured individually using pressure differential devices.

3. Geothermal Applications __________________________________________________________________________
30
High temperature wells are typically drilled in four stages: (Figure 3.1)
- a wide hole to a depth of 50-100 [m] into which is cemented the surface casing.
- a narrower hole to a depth of 200-600 [m] into which the anchor casing is cemented.
- a narrower hole still to a depth of 600 to 1,200 [m] which carries a cemented casing
called the production casing
- finally the production part of the wells drilled into and/or trough the active aquifer.
This part carries a perforated liner that is hung from the production casing reaching
almost to the well bottom.
On top (wellhead) the well is fitted with expansion provision and a sturdy sliding plate valve
(master valve). It is also commingled to a muffler, usually of a steel cylinder fitted with an
expanding steam inlet pipe to low down the fluid on entry. Steam capacity of these wells
commonly range between 3 ÷ 30 [kg/s] (1.5 MWe – 15 MWe) (Eliasson, 2001).
The drilling programs are of two types:
Standard:
- Surface casing 18’’ nominal diameter in a 20’’ hole.
- Anchor casing 13 3/8’’ nominal diameter in a 17 1/2’’ hole.
- Production casing 9 5/8’’ nominal diameter in a 12 1/2’’ hole
- Liner 7’’ nominal diameter in an 8 1/2’’ hole.
Wide:
- Surface casing 22’’ nominal diameter in a 24’’ hole.
- Anchor casing 18’’ nominal diameter in a 20’’ hole.
- Production casing 13 3/8’’ nominal diameter in a 17 1/2’’ hole
- Liner 9 5/8’’ nominal diameter in a 12 1/2’’ hole.
Wide tubing configurations has been initially implemented in order to cut down the
frequency of wellbore cleaning due to calcium carbonate scale depositions (Gudmundsson,
1986). These wide 13 3/8” production casing has been particularly developed in Iceland and

3. Geothermal Applications __________________________________________________________________________
31
the narrower 9 5/8’’ production casing is reported by many authors as the typical (Uphady et
al., 1977), (Gudmundsson and Thrainsson, 1988) . In present work, data about the wells was
taken from Icelandic sources for 13 3/8” production casing, from two fields Reykjanes and
Svartsengi. Nevertheless the deliverability considerations, presented in next section allowed
finding the operating parameters assuming the 9 5/8’’ production casing and thus simulations
covered the both typical tubing sizes.
Geothermal wells have total mass flowrates are greater than oil and gas wells, primarily due
to width casing configuration presented above that allows yield such high mass flowrates.
The calculations made in this work confirmed that diameter change from 13 3/8” to 9 5/8’’
allows yield almost double output.
Typical exploitation parameters gained from literature are placed in the Table 3.1
Table 3.1 Typical exploitation parameters
Variables Range
total mass flowrate 12.9 - 68.6 [kg/s]
wellhead pressure 2.3 - 56.5 [bar]
wellhead temperature 150 - 250 [oC]
wellhead enthalpy 965 - 1966 [kJ/kg]
well depth 913 - 2600 [m]
Geothermal reservoir data inspection presented here is required to characterise typical
geothermal well that can be used in pressure pulse simulations. Simulations will be done for
various mass flowrates, and wellhead pressures. In order to predict the above parameters,
deliverability method developed in petroleum industry and widely applied also for
geothermal reservoir engineering is necessary.

3. Geothermal Applications __________________________________________________________________________
32
3.3 Well performance
The production of liquid water from a geothermal reservoir depends on the reservoir pressure,
the flow of fluid trough the feedzone into the well, and then up the wellbore to the surface.
These three elements of deliverability are called reservoir, inflow and vertical lift
performance respectively. The production output test gives the deliverability at the time of
testing. As the production proceeds with the time the deliverability is like to change because
of drawdown in reservoir pressure. The prediction of the reservoir pressure with time is the
subject of reservoir modelling, and is not necessary to be discussed here.
The fluid entering flowing well in liquid dominated reservoir contains pressurized water.
Nevertheless when well flowing pressure pwf decrease below saturation pressure psat a two-
phase mixture of steam vapor and liquid water flows into the wellbore as a result of flashing
outside the wellbore. The flashing occurs over a relatively short distance near the wellbore.
This indicates that rapid pressure drop and radial-flow effects in the wellbore region may
control the output characteristics of geothermal well (Gudmundsson, 1986). The inflow
performance curve for geothermal well is composed of two forms of flow behavior,
depending upon whether the flowing pressure is above or below the saturation pressure of the
geothermal fluid. Above the saturation pressure a linear relationship as assumed between the
mass flowrate m and the well flow pressure pwf.
The inflow performance curve for geothermal well is composed of two forms of flow
behavior, depending upon whether the flowing pressure is above or below the saturation
pressure of the geothermal fluid. Above the saturation pressure a linear relationship is
assumed between the mass flowrate m and the well flow pressure pwf. In general the mass
flowrate increase when pressure difference enlarges as can be expressed:
( ) ⎥⎦⎤
⎢⎣⎡−⋅=
skgppPIm wfr (3.1)
where:

3. Geothermal Applications __________________________________________________________________________
33
m - mass flowrate ⎥⎦⎤
⎢⎣⎡
skg
rp - average reservoir pressure [ ]bar
wfp - well flow pressure [ ]bar
PI - productivity index ⎥⎦⎤
⎢⎣⎡
⋅ sbarkg
This equation applies for single-phase Darcy flow into the wellbore.
If the pressure in a near wellbore distance decreases below bubble point pressure the slope of
inflow performance curve is assumed to become more negative. This indicates that when
steam-water mixture enters the wellbore, the resistance to flow is grater than for liquid only
flow for the same flowrate. It is like a solution-gas drive reservoir in petroleum industry, and
thus equation from petroleum industry can be adopted, after some modifications. The orginal
form of the equation for oil and gas is given below
( ) ( )⎥⎦
⎤⎢⎣
⎡⋅
−⋅
+−⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅⋅⋅⋅
+−⋅+−⎟⎟
⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅⋅⋅⋅
=s
smppp
srr
Bk
hk
pps
rr
Bhk
qb
wfb
w
e
poo
or
br
w
e
pooo
br322
243ln
2
43ln
12µ
πµ
π
(3.2)
where:
k – permeability [m2]
h – thickness [m]
µ – dynamic viscosity [Pa·s]
re – effective radious [m]
rw – well radious [m]
Using HOLA 3.3 simulator described in Chapter 6, it is possible to estimate Productivity
Index PI for given wellhead flow conditions.

3. Geothermal Applications __________________________________________________________________________
34
In Darcy law for two phase flow the fluids are assumed to flow practically independently of
each other. The fundamental law is then applied to the two phase flow individually. In
geothermal simulation studies of two phase reservoir flow, the relative permeability for
steam and water need to be defined. The following expression gives the total mass flowrates:
⎥⎦⎤
⎢⎣⎡⋅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+⋅⋅−=s
kgdLdpkk
kAm
satps
s
sr
w
w
wr
ρµ
ρµ
(3.3)
Thus, to calculate curve for liquid only feedzone, when well flow pressure pwf above
saturation pressure, the following equation can be used:
( ) ⎥⎦⎤
⎢⎣⎡−⋅=
skgppPIm wfr (3.4)
And as the well flow pressure pwf decrease below saturation pressure the equation (3.3) can
be used in form
( ) ( )⎥⎦
⎤⎢⎣
⎡⋅
−
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+⋅+−⋅=s
smp
ppkkPIppPIm
sat
wfsat
satps
s
sr
w
w
wrsatr
322
2ρµ
ρµ
(3.5)
where: psat – saturation pressure [bar]
Gudmundsson et al. (1986) in their study of relative permeabilities give the necessary
relations. The relative permeability ratio of vapor and water can be calculated from equation
⎟⎟⎠
⎞⎜⎜⎝
⎛−
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⎟
⎠⎞
⎜⎝⎛=
w
w
s
w
sr
wr
SS
Kkk
11
µµ
(3.6)

3. Geothermal Applications __________________________________________________________________________
35
where: K - slip ratio,
Sw – water saturation;
Assuming that there is no interaction between the flowing phases, that is steam and water are
assumed to flow independently, the retaliations can be made
1=+ srwr kk (3.7)
Relative permeability for steam and water can be found from following functions:
For ,4.0<wS 6,0wwr Sk = ;
for ,4.02.0 << wS 7,0wwr Sk = ;
and
for ,2.0<wS 77,0wwr Sk = ;
The other way to calculate the two-phase performance curve part, below the saturation
pressure is to use the Vogel empirical relationship obtained for the situation when gas is
coming out of the solution (Gudmundsson, 1986).The equation has form
2
max
8.02.01 ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅−=
sat
wf
sat
wf
pp
pp
mm (3.8)
Where mmax is the ideally maximum flowrate obtained assuming pwf = 1[bar]
Vertical lift performance curves were calculated for particular wellhead pressures pwh, using
HOLA 3.1 wellbore simulator. Then MATHLAB 6.5 program has been used to calculate the
deliverability curves. The mass flowrate of steam and water from geothermal reservoir-
wellbore system is given by well operating point, determined by the intersection of the IPR
and VLP curves.

3. Geothermal Applications __________________________________________________________________________
36
Figure 3.1 Casing stage types

Chapter 4
Multiphase Flow in Wells

4. Multiphase Flow in Wells __________________________________________________________________________
38
4.1 Introduction
Two-phase flow occurs commonly in the petroleum, geothermal, chemical, civil, and nuclear
power industries. In the petroleum and geothermal industry, two-phase flow is encountered in
well production, transportation, processing systems. The complex nature of two-phase flow
challenges production engineers with problems of understanding, analyzing, and modelling
two-phase-flow systems. The calculation and prediction methods that are discussed in this
chapter were developed for petroleum industry. Geothermal applications also base on this
method, however due to different water and crude nature a different approach is required in
some cases.
4.2. Main difficulties
When two or more phases flow simultaneously in pipes, the flow behaviour is much more
complex than for single-phase flow. Phases tend to separate because of differences in density.
Shear stresses at the pipe wall are different for each phase as a result of their different
densities and viscosities. Expansion of the highly compressible gas phase with decreasing
pressure increases the in-situ volumetric flow rate of the gas. As a result, the gas and the
liquid phases normally do not travel at the same velocity in the pipe, upward flow the less
dense, more compressible, less viscous phase tends to flow at a higher velocity than the liquid
phase, causing a phenomenon known as slippage. However, for down flow, the liquid often
flows faster than the gas.
Perhaps the most distinguishing aspect of multiphase flow is variation in the physical
distribution of the phases in the flow conduit characteristic known as flow pattern or flow
regime (Brill, 1999). During multi-phase flow through pipes, the flow pattern that exists
depends on the relative magnitudes of the forces that act on the fluids. Buoyancy turbulence,
inertia, and surface-tension forces vary significantly with flow rates, pipe diameter,
inclination angle, and fluid properties of the phases (Brill, 2001). Several different flow
patterns can exist in a given well result of the large pressure and temperature changes the
fluids encounter (Manabe et al., 2001). Especially important is the significant variation in

4. Multiphase Flow in Wells __________________________________________________________________________
39
pressure gradient with flow pattern. Thus, the ability to predict flow pattern as a function of
the flow parameters is of primary concern.
Analytical solutions are available for many single-phase flow problems. Even when empirical
correlations were necessary (i.e., for turbulent-flow friction factors), the accuracy of
prediction was excellent. The increased complexity of multiphase flow logically resulted in a
higher degree of empiricism for predicting flow behaviour. Many empirical correlations have
been developed to predict flow pattern, slippage between phases, friction factors, and other
such parameters for multi-phase flow in pipes. Virtually all the existing standard design
method relies on these empirical correlations. However, since the mid-1970’s, a dramatic
advance have taken places that improve understand the fundamental mechanisms that govern
multiphase flow. These have resulted in new predictive methods that rely much less on
empirical correlations.
This chapter introduces and discusses basic definitions for parameters unique to multiphase
flow in pipes. Flow patterns are described in detail, including methods available to predict
their occurrence. The use of empirical correlations based on dimensional analysis and
dynamic similarity performed by software used in this work are presented.
4.3. Phase behaviour
Two-phase can be interpreted as a single component like a water and its vapour – steam, and
a complex mixture of various components like a hydrocarbons composition. Geothermal fluid
or complex mixture of hydrocarbon compounds or components can exists as a single-phase
liquid, a single-phase gas, or as a two-phase mixture, depending on the pressure, temperature,
and the composition of the mixture (Campbell, 1994).
Unlike to a single component or compound, such as water-steam system, when two phases
exist simultaneously a multicomponent mixture will exhibit an envelope rather than single
line on a pressure/temperature diagram. Figure (3.1) gives a typical phase diagram for a
multicomponent hydrocarbon system. Shapes and ranges of pressure and temperature for

4. Multiphase Flow in Wells __________________________________________________________________________
40
actual envelopes vary widely with composition. Figure (3.1) permits a qualitative
classification of the types of reservoirs encountered in oil and gas systems.
Typical oil reservoir has temperatures below the critical temperature of the hydrocarbon
mixture. Volatile oil and condensate reservoirs normally have temperatures between the
critical temperature and the cricondentherm for the hydrocarbon mixture. Dry gas reservoirs
have temperature above the cricondentherm (Campbell, 1994). Many condensate fluids
exhibit retrograde condensation, a phenomena in which condensation occurs during pressure
reduction rather than with pressure increase, as for most gases (Firoozabadi, 1999). This
abnormal or retrograde behaviour occurs in a region between the critical and the
cricondentherm, bounded by the dewpond curve above and, a curve below formed by
connecting the maximum temperate for each liquid volume percent.
As pressures and temperatures change, mass transfer occurs continuously between the gas
and the liquid phases within the phase envelope of Fig. 3.1. All attempts to describe mass
transfer assume that equilibrium exists between the phases. Two approaches have been used
to simulate mass transfer for hydrocarbons the "black-oil" or constant-composition model and
the (variable) compositional model (Brill, 1999). Each is described in the following sections.
Figure 3.1 Typical phase diagram (Campbell, 1994)

4. Multiphase Flow in Wells __________________________________________________________________________
41
Black-Oil Model
The term black oil is a misnomer and refers to any liquid phase that contains dissolved gas,
such as hydrocarbons produced from oil reservoirs. These oils are typically dark in colour,
have gravities less than 40° API (824.97 kg/m3), and undergo relatively small changes in
composition within the two-phase envelope (William and McCain, 2002). A better
description of the fluid system is a constant-compositional mode. For black oils with
associated gas, a simplified parameter Rs has been defined to account for gas that dissolves
(condenses) or evolves (boils) from solution in the oil. This parameter, Rs can be measured in
the laboratory or determined from empirical correlations. Because the black-oil model cannot
predict retrograde condensation phenomena, it should not be used for temperatures
approaching the critical-point temperature.
A second parameter, called the oil formation volume factor Bo also has been defined to
describe the shrinkage or expansion of the oil phase. Oil volume changes occur as a result of
changes in dissolved gas and because of the compressibility and thermal expansion of the oil.
Dissolved gas is by far the most important factor that causes volume change. Oil formation
volume factor can be measured in the laboratory or predicted with empirical correlations
(Brill and Mukherjee, 1999). Once the black-oil-model parameters are known, oil density and
other physical properties of the two phases can be calculated. When water also is present,
solution gas/water ratio, Rsw, and water formation volume factor, Bw, can be defined. Brill and
Mukherjee (1999) also give correlations for these parameters and physical properties of the
water. The amount of gas that can be dissolved in water and the corresponding possible
changes in water volume are much smaller than for gas/oil systems (William and McCain,
2002).
Compositional Model
For volatile oils and condensate fluids, vapour-liquid equilibrium (VLE) or "flash"
calculations are more accurate to describe mass transfer than black-oil-model parameters.
Brill and Mukherjee (1999) provide a description of VLE calculations. Given the
composition of a fluid mixture or "feed," a VLE calculation will determine the amount of the
feed that exists in the vapour and liquid phases and the composition of each phase. From

4. Multiphase Flow in Wells __________________________________________________________________________
42
these results, it is possible to determine the quality or mass fraction of gas in the mixture.
Once the composition of each phase is known, it also is possible to calculate the interfacial
tension and densities, enthalpies, and viscosities of each phase. Brill and Mukherjee (1999)
also give methods to predict these properties.
VLE calculations are considered more rigorous than black-oil model parameters to describe
mass transfer. However, they also are much more difficult to perform. If a detailed
composition is available for a gas/oil system, it is possible to generate black-oil parameters
from VLE calculations. However, the nearly constant compositions that result for the liquid
phase and the increased computation requirements make the black-oil model more attractive
for non-volatile oils (Brill, 1999).
4.4. Definition and variables
When performing multiphase calculations, single-phase flow equations often are modified to
account for the presence of a second phase. This involves defining mixture expressions for
velocities and fluid properties that use weighting factors based on either volume or mass
fraction (King, 1990).
When gas and liquid flow simultaneously up a well, the higher mobility of the gas phase
tends to make the gas travel faster than the liquid. This is a result of the lower density and
viscosity of the gas. The slippage between both phases in defined as the ratio of the gas
velocity to the liquid velocity
L
G
uu
K = (4.1)
where, uG – gas velocity [m/s], uL – liquid velocity [m/s].
The mass fraction of flowing phases is defined as the ratio of gas mass flowrate to the total
mixture flowrate:

4. Multiphase Flow in Wells __________________________________________________________________________
43
LG
G
mmm
x+
= (4.2)
where, mG – gas mass flowrate [kg/s], mG – liquid flowrate [kg/s]. The gas mass flowrate is
related to the volume flowrates with expression
GGGG Aum ⋅⋅= ρ (4.3)
and similarly the liquid phase
LLLL Aum ⋅⋅= ρ (4.4)
where AG and AL are the cross sectional area occupied by gas and liquid phase respectively.
Under steady state condition the slippage between both phases result in a disproportionate
amount of the slower phase being present at any given location in the well. Gas void fraction
can be defined as the fraction of pipe cross sectional area occupied by gas. Substitution of the
equations (4.3) and (4.4) to the equation (4.2) results in the void fraction given by
( )xKx
x
L
G −⋅⋅+=
1ρρ
α (4.5)
The opposite value to the gas void fraction is the liquid holdup defined similar way as the
cross section area occupied by liquid or volume increment that is occupied by the liquid
phase
( )α−= 1LH (4.6)
The gas void fraction and liquid holdup can be distinguished in horizontally oriented pipes
where stratification occurs due to gravity. In vertical wellbore two-phase turbulent flow under

4. Multiphase Flow in Wells __________________________________________________________________________
44
high velocities, both phases may be considered as a homogenous mixture (King, 1990). Two
phases may be assumed to flow at the same mixture velocity with no slippage between.
4.5. Fluid properties
A numerous equations have been proposed to describe the physical properties of gas/liquid
mixtures. The following expression has been used to calculate in multi-phase flow mixture
density
( ) LGM ραραρ ⋅−+⋅= 1 (4.7)
The two phase viscosity is the property expressed per mass unit and thus was calculated from
equation
LGM
xxµµµ−
+=11 (4.8)
When performing the temperature change calculations for multi-phase flow in geothermal
wells, it is necessary to predict the enthalpy of the multiphase mixture. Also most VLE
calculation method for oil wells includes a provision to predict the enthalpies of the gas and
liquid phases. Enthalpy of the mixture was calculated from equation
( ) LGt hxhxh ⋅−+⋅= 1 (4.9)
4.6. Flow patterns
Prediction the flow pattern that occurs at a given location a well is extremely important. The
empirical correlations or mechanic model used to predict flow behaviour varies with flow
pattern (Gomez, 2001). Essentially all flow pattern predictions are based on data from low-
pressure systems, with negligible mass transfer between the phases and with a single liquid
phase (Brill, 1999). Consequently, these predictions may be inadequate for high-pressure,

4. Multiphase Flow in Wells __________________________________________________________________________
45
high production-rates, evidently high-temperature geothermal wells, or for wells producing
oil and water or crude oils with foaming tendencies, respectively (Manabe et al., 2001),
(Gudmundsson and Ambastha, 1984), (Aggour, 1996).
A consensus exists on how to classify flow patterns (Brill, 1999). For upward multi-phase
flow of gas and liquid, most investigators now recognize the existence of four flow patterns:
bubble flow, slug flow, churn flow, and annular flow. These flow patterns, shown
schematically in Fig. (4.2) and Figure (4.3) are described next. Slug and churn flow are
sometimes combined into a flow pattern called intermittent flow. It is common to introduce a
transition between slug flow and annular flow that incorporates churn flow. Some
investigators have named annular flow as mist or annular-mist flow.
Flow in vertical and horizontal or inclined pipes exhibits different behaviour. The distribution
of the multiphase contents across the pipe in vertical flow regimes is randomly chaotic, and
the phases show no preferences for the one side of the pipe or another. The exception to the
random distribution is annular flow where at very high flow rates gas occupies the centre of
the pipe. There may be large discontinuities that pass along the vertical pipe or wellbore, as
when gas flows much faster than liquid in slug and churn flow regime. In non vertical flow
random distribution of the phases across the pipe is replaced by gravity segregation by the
phases.
Bubble Flow Bubble flow is characterized by a uniformly distributed gas phase and discrete
bubbles in a continuous liquid phase. Based on the presence or absence of slippage between
the two phases, bubble flow is further classified into bubbly and dispersed - bubble flows. In
bubbly flow, relatively fewer and larger bubbles move faster than the liquid phase because of
slippage. In dispersed bubble flow, numerous tiny bubbles are transported by the liquid phase,
causing no relative motion between the two phases.
Slug Flow Slug flow is characterized by a series of slug units. Each unit is composed of a
gas pocket a plug of liquid called a slug, and a film of liquid around the bubble flowing
downward relative to the Taylor bubble. The Taylor bubble is an axially symmetrical, bullet-

4. Multiphase Flow in Wells __________________________________________________________________________
46
shaped gas pocket that occupies almost the entire cross-sectional area of the pipe. The liquid
slug, carrying distributed gas bubbles, bridges the pipe and separates two consecutive Taylor
bubbles.
Churn Flow Churn flow is a chaotic flow of gas and liquid in e which the shape of both the
Taylor bubbles and the liquid slugs are distorted. Neither phase appears to be continuous. The
continuity of the liquid in the slug is repeatedly destroyed by a high local gas concentration.
An oscillatory or alternating direction of motion in the liquid phase is typical of churn flow.
Annular Flow Annular flow is characterized by the axial continuity of the gas phase in a
central core with the liquid flowing upward, both as a thin film along the pipe wall and as
dispersed droplets in the core. At high gas flow rates more liquid becomes dispersed in the
core, leaving a very thin liquid film flowing along the wall.
The interfacial shear stress acting at the core/film interface and the amount of entrained liquid
in the core are important parameters in annular flow.
Figure 4.2 Vertical flow patterns

4. Multiphase Flow in Wells __________________________________________________________________________
47
Figure (4.3) Horizontal and inclined flow patterns
4.7. Pressure gradient
The pressure gradient equation for multi-phase flow can be modified from single-phase flow.
Considering the fluids to be a homogenous mixture the equation may be written
dLdu
ugd
ufdLdp M
MMMMM ⋅⋅+⋅⋅+
⋅⋅⋅
= ρθρρ
sin2
2
(4.10)
For vertical flow θ = 90o, dL =dz and the equation for pressure gradient can be written as
accelf dzdp
dzdp
dzdp
dzdp
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛ (4.11)

4. Multiphase Flow in Wells __________________________________________________________________________
48
The pressure-gradient equation for single-phase flow in pipes was developed by use of the
principles of conservation of mass and linear momentum. The same principles are used to
calculate pressure gradient for multiphase flow in pipes. However, the presence of an
additional phase makes the development much more complicated. The pressure-drop
component caused by friction loses requires evaluation of two phase friction factor. The
pressure drop caused by elevation change depends on the density of the two phase mixture
which may be calculated from equation (4.7). The pressure drop caused by acceleration
component in normally negligible as is considered only for cases of very high flow velocities
(King 1990).
4.8. Multiphase flow models
Early investigators treated multiphase flow as a homogeneous mixture of gas and liquid. This
approach did not recognize that gas normally flows faster than liquid. The no slip approach
tended to under predict pressure drop because the volume of liquid predicted to exist in the
well was too small (Brill, 1999) Improvements to the no-slip methods used empirical liquid
holdup correlations to account for slippage between the phases. Although liquid holdup and
friction effects were often dependent on the flow pattern predicted by empirical flow-pattern
maps, in general these methods still treated the fluids as homogeneous mixture (Falk 1999).
Treating the fluids as a homogeneous mixture is often unrealistic, resulting in poor
predictions of flow behaviour (Brill, 1999). A trend to improve flow-behaviour predictions
has emerged that is a compromise between the empirical correlations and the two-fluid
approach. The methods used to predict pressure gradient can be classified as empirical
correlations and mechanistic models (Gomez, 1999). The empirical ones are based on
experimental data, and are suitable for preceding steady-state flow. The mechanistic
multiphase flow models include the two-fluid model, the drift-flux model and the
homogenous model (Manabe et al., 2001). These can be developed from physical relationship
with mass, momentum and energy conservation of each phase resulting in local,
instantaneous equations. The mechanistic modelling approach still requires use of some

4. Multiphase Flow in Wells __________________________________________________________________________
49
empiricism, but only to predict specific flow mechanisms or closure relationships (Gomez,
1999).
The conservation laws are connected by interaction laws between the phases and between the
fluid and wall. A popular approach is to average the conservation equations over the cross
sectional area to get a one-dimensional model. The mechanistic models differ from each in
how they implement the conservation laws (Falk, 1999). The two-fluid method uses one
conservation equation for each phase, the drift-flux method uses the sum of the momentum
equations in addition to energy and mass conservation for each phase, while the homogenous
flow model uses only the sum of all phases for each conservation law. The homogenous flow
model is a simplification, assuming the same flow velocity for all phases (Gould, 1970), thus
needs neither interfacial friction nor drift flux terms.
The empirical correlations can be placed in one of three categories (Brill,1999):
I category - no slip, no flow pattern consideration. The mixture density is calculated based on
the input gas/liquid ratio. That is, the gas and liquid are assumed to travel at the same velocity.
The only a correlation required is for the two-phase friction factor. No distinction is made for
different flow patterns.
II category - slip considered, no flow pattern considered. A correlation is required for both
liquid holdup and friction factor. Because the liquid and gas can travel at different velocities,
a method must be improved to predict the portion of the pipe occupied by liquid at any
location. The same correlations used for liquid holdup and friction factor are used for all flow
patterns.
III category - slip considered, flow pattern considered. Not only are correlations required to
predict liquid holdup and friction factor, but methods to predict which flow pattern exists are
necessary. Once the flow pattern is established, the appropriate holdup and friction factor
correlations are determined. The method used to calculate the acceleration pressure gradient
also depends on flow pattern.

4. Multiphase Flow in Wells __________________________________________________________________________
50
The following list presented on Figure (4.3) gives the published empirical correlations for
vertical upward flow and the categories in which they belong.
Method
Category
Poettmann and Carpenter
Baxendell and Thomas
Fancher and Brown
Hagedorn and Brown
Gray
Asheim
Duns and Ros
Orkiszewski
Aziz
Chierici
Beggs and Brill
Mukherjee and Brill
I I I
II
II
II
III
III
III
III
III
III
Figure 4.3 Published Vertical Flow Correlations Categories
The following sections of this chapter present method to predict pressure gradients and
presents the methods applied for calculations that were performed. In present work Duns and
Ros, 1963 for oil wells and also Orkiszewski, 1967 for geothermal well methods was applied.
Those authors summarized numerous investigations that have described flow patterns in
wells and made attempts to predict when occur. Both correlations were verified many times

4. Multiphase Flow in Wells __________________________________________________________________________
51
since the time that was developed by other authors and by the industry elaborating the
software commercially available. Those methods are recommended for vertical wells
calculations and contain modifications that improve accuracy. (PipeSim Manual),
(Gudmundsson and Oritz, 1984) (Uphady, 1977)
4.9. Duns and Ros correlation for multiphase flow in oil wells
Duns and Ros method was chosen for oil wells calculations performed in present work. This
method is ranged to III group from Figure (4.3), which is assumed to give the most
appropriate issues. The method is a result of an extensive laboratory study in which liquid
holdup and pressure gradients were measured. About 4,000 two-phase-flow tests were
conducted in a 185-ft (56,39m)-high vertical-flow loop. Pipe diameters ranged from 1.26 to
5.60 in. and included two annulus configurations. Most of the tests were at near-atmospheric
conditions with air for the gas phase and liquid hydrocarbons or water as the liquid phase.
Liquid holdup was measured by use of a radioactive-tracer technique. A transparent section
permitted the observation of flow pattern. For each of three flow patterns observed,
correlations were developed for friction factor and slip velocity, from which liquid holdup
can be calculated. Duns and Ros performed the first dimensional analysis of two-phase flow
in pipes. They identified 12 variables that were potentially important in the prediction of
pressure gradient. Performing a dimensional analysis of these variables resulted in nine
dimensionless groups. Through a process of elimination, four of the groups were identified as
being important and were used to select the range of variables in the experimental program.
Equations presented in Appendix B for this method gives those four groups.
4.10. Duns and Ros modifications
Two proprietary modifications of the Duns and Ros method have been developed but are not
available in the literature. The first, known as the Ros field method, involved modifications
based on carefully obtained data from 17 high-GOR vertical oil wells. In a joint Mobil-Shell
study undertaken between 1974 and 1976, a modification resulted in the Moreland-Mobil-
Shell method (MMSM) (PipeSim Manual). In this study, 40 vertical oil wells, including the

4. Multiphase Flow in Wells __________________________________________________________________________
52
17 used in the Ros field method, and 21 directional wells were selected as the basis for the
modifications. The MMSM method includes liquid- holdup correlations derived from the
data for bubble and slug flow that are simpler in form than those used in the original Duns
and Ros method (Brill, 1999). Possible discontinuities at flow-pattern-transition boundaries
also were removed.
4.11. Orkiszewski correlation for multiphase flow in geothermal wells
For Geothermal Two-phase flow calculations Orkiszewski correlation was used. This method
was recommended by Uphadhay and Hartz (1977). Their work contains comparison of
calculated and observed flowing pressure profiles for geothermal wells located in the United
States and Philippines. Comparisons were included for tubular flow as well as flow trough
the casing-tubing annulus. Their work revealed that for tubular flow, the Orkiszewski
correlation makes the best prediction, whereas for annular flow, no clear choice of correlation
can be made. Similar work has been done by Ambastha and Gudmundsson (1986), they
measured the flowing pressure profile data from many geothermal wells around the world,
covering a vide range of flowrate, fluid enthalpy and wellhead pressures. The authors
reported a good accuracy of Orkiszewski correlation in estimating the downhole conditions.
The capability to accurately predict flowing pressures in geothermal wells producing steam
and water a mixture under various operating conditions is of value importance for several
reasons similar to petroleum industry. These are general evaluation of the geothermal
reservoir under proper reservoir management, optimalisation of the wellbore design from
well deliverability considerations and minimization of scale deposits in the wellbore
(Ragnarsson, 2000). The predictive capability is especially important because of the difficulty
of running flowing pressure surveys in geothermal wells. These wells are characterized by
very high fluid velocities, which sometimes makes impractical for pressure recorders to
traverse downward in the well. There have been the cases of pressure recorders thrown out of
the wellbore due to fluid velocities (Uphadhay, 1977).
In calculating flowing pressure profiles in oil wells, phase transfer between oil and gas

4. Multiphase Flow in Wells __________________________________________________________________________
53
requires a rather simple treatment, and is accomplished trough the use of solution gas-oil ratio
– Rs relationship. In geothermal wells, however phase transfer between water and steam
attains critical importance and calculations must incorporate the steam tables accurately.
Pressure profile calculations for geothermal wells vary from those for oil well in another
important aspect in that the temperature of the fluid must be computed precisely.
Orkiszewski tested several published correlations with field data and concluded that none
was sufficiently accurate for all flow patterns (Orkiszewski, 1967) He then selected what he
considered to be most accurate correlations for bubble and mist flow and proposed a new
correlation for slug flow. Orkiszewski used the Duns and Ros flow-pattern transition for the
boundaries between slug flow and mist flow, including the transition region between them.
Equation defined these are given in Appendix B together with Duns and Ros correlation
description. For the boundary between bubbly flows, he chose these criteria established by
Griffith and Wallis.

Chapter 5
Speed of Sound in Two-Phase Mixtures

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
55
5.1. Introduction
A book on physical acoustic (Trusler, 1991), defined sound as infinitesimal pressure waves
propagating trough a medium with a characteristic speed; the velocity of sound depending on
media. In present work a pressure wave caused by a rapid valve closure travels at the
velocity of sound trough the two phase mixture. This velocity is dependant on the
compressibility and densities of both phases. These flowing phases may have different
structures; usually it is of the gas bubbles or slug surrounded by the liquid phase. The gas
present in liquid phase cause a marked increase of damping. The examination of this
phenomena showed that this damping is due to increase of distortion of the liquid separating
the bubbles. The pressure variations act almost entirely on the volume of gas and scarcely at
relative incompressible liquid (Firoozabadi, 1999)
5.2. Compressibility of two-phase mixtures
The velocity of sound is defined as the square root of the derivative of pressure with respect
to the density at constant entropy (Henry et al. 1977)
S
pa ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=ρ
(5.1)
The second law of the thermodynamics tells that process must be isentropic due to there is no
temperature gradient except inside the wave itself. Therefore instead of differentiate the
density, the sonic velocity can be related to the properties of the fluid. Using isentropic
compressibility Ks the speed of sound formula can be written
SKa
⋅=ρ
12 (5.2)

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
56
The isentropic compressibility of a single fluid Ks is defined as
nSS p
vv
K,
1⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⋅⎟⎠⎞
⎜⎝⎛−= (5.3)
where v is the specific volume [m3/kg] and n is the composition vector, which is defined by
n = (n1, n2, n3, …, nc), where c is the total number of components and ni is the number of moles
of each component i of the mixture. The expression for the two-phase gas liquid mixture
compressibility will be
nS
M
MMS p
vv
K,
1⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−= (5.4)
vM is the total specific volume of the gas liquid phases in the mixture. Similarly, the
isothermal compressibility of a two-phase multicomponent system is defined by
nT
M
MMT p
vv
K,
1⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−= (5.5)
The isothermal compressibility represents the volume change caused by small change in the
pressure of the closed system at constant temperature. The isothermal and isentropic
compressibility in the single phase state are related by a simple expression (Firoozabadi,
1999)
SV
pT K
CC
K ⋅= (5.6)
Where Cp and CV are the heat capacities [kJ/kg·K] at constant pressure and constant volume,
respectively. The derivation of (5.6) can be found in (Firoozabadi, 1999).

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
57
Since Cp ≥ Cv, then KT ≥ KS. In reservoir engineering applications isothermal compressibility
is often used to describe the fluid compressibility away from the wellbore. Inside the well,
due to expansion, the fluid may undergo heating or cooling and process may become
nonisothermal. If the heat loss can be neglected, the isentropic compressibility may better
represent the pressure and volume changes.
Practicing engineers in order to obtain the two-phase compressibility often use the following
relationship (Firoozabadi, 1999)
LLTGGTMT SKSKK ⋅+⋅= (5.7)
where SG and SL are the volumetric fractions of the gas and liquid components, respectively.
The equation is invalid where there is mass transfer between the phases (Firoozabadi, 1999)
what is of vital importance for water and its vapor system discussed in further section.
5.3. Compressibility of steam-water system
Calculations of the sound speed in two-components two-phase systems is an easy procedure
if adiabatic equation of state data are available to calculate compressibility, because pressure
and temperature may be considered to be independent variables in such systems. Calculation
of the sound speed in one-component two-phase system is more difficult matter because the
pressure and temperature are not independent variables and are related by the Gibbs equation
for equilibrium between both phases (Kieffer, 1977).
The complex physical process which occurs during propagation of sound wave in water-
vapor two-phase system is given in Appendix C. Propagation of the sound wave in the fluids
is accomplished by compression or rarefaction. If steam-water system remains in thermal
equilibrium where variables characterizing the system may be considered to follow the
saturation line, there must be mass transfer between the phases, since the fraction of steam in
mixture changes due to evaporation or condensation process. When the pressure wave passes
the adiabatic compression causes pressure increase in both phases; as a result the water

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
58
becomes subcooled, and the steam becomes superheated. The induced temperature difference
between the steam ad water phases leads to the heat transfer from superheated steam to
subcooled water (Kieffer, 1977). Depending on the original phase composition, whether
steam or water was the dominant phase heat transfer will cause water evaporation or steam
condensation. These heat and mass transfer cause that both water and steam are restored to
the saturation line. Similar process takes place in cause of pressure reduction.
In general consideration the evaporation and condensation can not take place instantaneously,
since transportation of heat and mass can only occur at a finite speed. The time period in
flashing water to steam or condensing steam to water is important in determination the degree
of equilibrium obtained in the sound wave. Since condensation and evaporation generally
proceed at different rates, it should be expected that compression and rarefaction waves
behave differently. Experiments have confirmed this theory that finite amplitude rarefaction
waves in steam water mixtures have lower velocities than compression waves because
rarefaction waves tend to maintain continuous equilibrium (McWilliam and Duggins, 1969).
A mixture of liquid and its vapor may respond to pressure disturbances by equilibrium and
nonequilibrium state. Nearly high frequencies waves the process of pressure wave
propagation follows fast and may be considered adiabatic where there is no equilibrium
between the phases. In this case the mass transfer can be neglected and thus calculations of
speed of sound are greatly simplified. The pressure pulse waves are low frequency
(Gudmundsson and Celius, 1999; Falk 1999) thus equilibrium response needs to be
considered and the mass transfer between the liquid and its vapor occurs in a time short with
comparison to the acoustic wave period.
Due to complex physical process related to the acoustic wave propagation in one-component
system different approach than for two-component need to be considered in order to find
steam-water compressibility. Experimental data on sonic velocity in steam-water system at
geothermal wellbore conditions are not readily available. To solve this problem theoretical
calculation need to be carried out to find the compressibility of this system for ideal
thermodynamics conditions. The method to derive the compressibility of a steam-water
mixture in contact with reservoir rock was elaborated by Grant and Sorey (1979). Similar

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
59
approach was adapted to geothermal wells by Gudmundsson et al., (1998). The studies
below are based on the work of these authors.
Two-phase fluid in geothermal well can be considered to be in thermodynamics equilibrium
where the flow is homogenous, steady-state and one dimensional. Assuming adiabatic
conditions no heat loss and gain a balance equation can be written for steam-water mixture
flowing from one infinitesimal cross section to another (Gudmundsson et al., 1998)
( ) 22221111 )1(1 LGLG hxhxhxhx ⋅−+⋅=⋅−+⋅ (5.8)
where x represents the mass fraction of the steam, and hG and hL [kJ/kg] are the enthalpy of
steam and vapor and liquid water, respectively. The equation can also be written as
222111 LGLLGL hxhhxh ⋅+=⋅+ (5.9)
the hLG [kJ/kg] is the latent heat of vaporization which may be assumed to change negligible
between adjacent cross-sections; from one infinitesimal cross-section to another. Thus the
equation (5.17) can be rewrite in form
( ) LGLL hxxhh ⋅−=+ 1221 (5.10)
Since for liquid water a change in enthalpy is equal to the heat addition at constant pressure
pp T
hC ⎟⎠⎞
⎜⎝⎛∂∂
= (5.11)
the equation (5.17) can be written as
( ) LGLp hxxTC ⋅−=∆⋅ 12 (5.12)

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
60
When pressure is lowering the dominant volume change is that caused by phase change;
flashing liquid into steam vapor. As water before changed phase has occupied a volume
∆m·vW, after that occupies larger volume being in gas phase ∆m·vG. This increase of volume
can be written as
( )LG vvmV −⋅∆=∆ (5.13)
The mass of water that changed phase is simply
( ) mxxm ⋅−=∆ 21 (5.14)
Therefore the change in mixture volume becomes
( ) ( )LG vvxxmV −⋅−⋅=∆ 12 (5.15)
As shown in previous section the compressibility may be defined in several ways depending
on what physical property is assumed to be constant, temperature, enthalpy or entropy. The
question arises what conditions may be found as the fluid flows in the wellbore. Usually as
defining compressibility the temperature is assumed constant, giving an isothermal
compressibility. For two-phase wellbore flow without heat loss or gain adiabatic process
seems to be most appropriate. From thermodynamics we know that an isentropic process is
both adiabatic and reversible. The flow in pipes, pipelines and wells, frictional pressure loss
makes the process non-reversible. This aspect of fluid flow is particularly important in
situation where rapid pressure drop occur for example in nozzles (Watters, 1978). It may be
considered less important in situations where the pressure changes gradually with distance for
example if wellbores and long pipelines. Since the sonic velocity of steam-vapor flowing in
the well may be approximated to isentropic conditions for which the acoustic velocity is
defined in equation (5.1).

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
61
Taking the compressibility from equation (5.3), and eliminating (x2-x1) from equation (5.23)
by substituting equation (5.20), the compressibility may be written in form (Gudmundsson et
al., 1998)
( )LG
LGLp
Ms hp
vvTCmV
K⋅∆
−⋅∆⋅⋅⋅−=
1 (5.16)
The fraction represents the total mixture density MMV
m ρ= defined in equation (4.7).
At all condition fluid maintain equilibrium between the phases and follows the saturation line
thus
satTp
Tp
⎟⎠⎞
⎜⎝⎛∆∆
=∆∆ (5.17)
Substituting from equation (4.7) the compressibility is
( ) ( )( )
LGsat
LGLGLps
hTp
vvCK
⋅⎟⎠⎞
⎜⎝⎛∆∆
⋅−−⋅⋅−⋅=
ραρα 1 (5.18)
satT
p⎟⎠⎞
⎜⎝⎛∆∆ may be calculated using steam tables what bring considerable inconvenience in
evaluating compressibility numerically. This can be avoided using Clausius-Clapeyron
equation
( ) ( )LG
LG
sat vvTh
Tp
−⋅+=⎟
⎠⎞
⎜⎝⎛∆∆
15.273 (5.19)

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
62
Compressibility expressed in this form is convenient for numerical calculations. The
thermodynamics properties values can be obtained from wellbore simulator output file and
then sonic velocity can be calculated.
5.4 Acoustic velocity models
The formulas derived for acoustic velocity base on experiments performed and varies with
respect to the components that was applied and flow patterns encountered during the
experiments. The flow regimes are described in chapter 4 of this work which deals with
multiphase flow in wells. Also the fact is important, whether homogeneity can be assumed or
not. For homogenous flow the slippage between the phases may be neglected. The study of
different models that was made here has the purpose to find the most appropriate model for
sonic velocity in one component steam-water mixture and two component gas-oil mixtures.
In present thesis acoustic velocity in steam-water mixture was calculated from Wood (1941)
equation. He derived the equation for the velocity of sound in a homogenous two component
media, based on air-water experiments (Wood, 1944). The author proposes instead of
differentiating the density of liquid mixture as shown in (5.1) relate the sonic velocity directly
to the properties of the gases and liquids. This model assumes that overall compressibility of
the mixture is related to the compressibility of the constituents by the relation
( )αα −⋅+⋅= 1LSGSMS KKK (5.20)
Substituting the compressibility of single phases from equation (5.2) yields
( )
22
1
11
LLGG
LGWood
aa
a
⋅−
+⋅
⋅−+⋅=
ρα
ρα
ραρα (5.21)

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
63
where α is the void fraction and ρ is the density, with the subscripts G and L indicating the gas
and liquid, respectively. Nakoryakov et al. (1993) provided that Wood’s equation can be
derived from equation (5.1) assuming the mass fraction of each phase reminded constant
what is not such a good assumption for steam-water system. Another theoretical limiting case
for vapor-liquid had the changes in density exclusively included by variation in the gas-mass
fraction due to flashing. In experiments however practically nobody has manage to observe
disturbances propagating with this flashing velocity (Falk, 1999). Semenow and Kostern
(1964) found experimentally sonic velocity in steam water flow agreeing well with Wood’s
estimate, and Noryakov et al. (1993) claimed that acoustic of Wood was the low frequency
limit for bubbly flow when the wave process were isothermal. For high frequencies the wave
process was adiabatic without energy transfer leading to the “frozen” velocity not treated here.
(Nakoryakov et al., 1993).
The dependence of propagation velocity on flow regimes demonstrates analytical expression
derived by Henry for bubbly flow using a slip flow model (Falk, 1999).
( )( ) ( )
22
1
1111
LLGG
LGHenry
aaK
KKa
⋅−
+⋅⋅
⋅−+⋅⋅−⋅−=
ρα
ρα
ραραα (5.22)
The author claimed that interfacial momentum transfer exhibited a strong influence on the
propagation velocity, and that different flow structures would have different interfacial drag
during the passage of the wave. Assuming homogenous flow with sleep K=1, equation (5.29)
reduces to Wood’s equation (5.28). However formula for acoustic velocity in slug flow
overestimates the results giving velocities close to the velocity of sound in gas phase (Falk,
1999). As the slug flow is mostly encountered flow pattern in flowing geothermal wells, this
model may bring the wrong results.
There are a few examples of analytical models for sonic velocity in gas liquid mixtures in
literature (McWilliam and Duggins, 1969; Kiefer, 1977; Firoozabadi 2000). These models

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
64
are based on equation (5.1) and relate the density of the mixture to the densities gases and
liquids. To make the differentiation in equation (5.1) possible, the ideal gas law was
employed for the gas and adiabatic state equation for the liquid. The derived expression for
the density of mixture was then differentiated with respect of the pressure. Henry et al. (1974)
in the book of thermodynamics properties of hydrothermal systems showed that steam
express the significant deviation from the perfect gas under high pressure conditions. Such
high pressures may be expected in geothermal wells treated in this work, thus these models
also do not occur to be the most applicable.
It is well known that properties of the natural gas also deviate from perfect gas for high
pressures, thus from the same purpose acoustic velocity in oil - gas mixture was calculated
using the formula developed by Gudmundsson and Dong (1993). The authors similarly to
Wood relate the sonic velocity directly to the properties of the gases and liquids
(Gudmundsson and Dong, 1993). Their formula presented below, was developed for gas-oil
mixture and assumes that liquid phase may contain water.
The thermodynamics compressibility and densities of mixture components are related
assuming the phases are homogenously distributed in the liquid. From equation (4.7) the
density of gas/liquid mixture is given by
( ) LGM ραραρ ⋅−+⋅= 1 (5.23)
where α is the gas/liquid void fraction, and the subscripts G and L stand for gas and liquid,
respectively. If the liquid phase contains both water and oil, the density of the liquid phase
can be similarly obtained from
( ) OWL ρβρβρ ⋅−+⋅= 1 (5.24)
where β is the water-oil volumetric fraction and the subscripts W and O stands for water and
oil, respectively.

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
65
Substituting (5.24) into (5.23) gives the density of gas-oil-liquid mixture
( ) ( )[ ]OWGM ρβρβαραρ ⋅−+⋅⋅−+⋅= 11 (5.25)
The relationship (5.7) can be written for: gas-oil-water mixture as
WWTOOTGGTMT SKSKSKK ⋅+⋅+⋅= (5.26)
where the S – volumetric fraction of the component is in fact the void fraction α and SO and
SW is the liquid holdup (1-α). Thus (5.26) can be alternatively written as
( ) LTGTMT KKK αα −+⋅= 1 (5.27)
If the liquid contains water and oil, its isothermal compressibility can be expressed as
( ) OTWTLT KKK ⋅−+⋅= ββ 1 (5.28)
For gas-oil-water mixture, the heat capacities at constant temperature and constant volume
may be expressed as
( ) ( ) ( )[ ]OpWpGpLpGpMp CyCyxCxCxCxC ⋅−+⋅⋅−+⋅=⋅−+⋅= 111 (5.29)
and
( ) ( ) ( )[ ]OVWVGVLVGVMV CyCyxCxCxCxC ⋅−+⋅⋅−+⋅=⋅−+⋅= 111 (5.30)

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
66
Where x is the gas-liquid mass fraction and y is the water-oil mass fraction. It should be noted
that mass fraction instead void fraction is employed in these equations because the ratio of
specific heats is a property based on mass unit (Gudmundsson, 1993).
From equations (5.2) and (5.6) speed of sound for mixture is given as
MTM Ka
⋅=ρ
γ2 (5.31)
where γ is the ratio of specific heats
V
p
CC
=γ (5.32)
Substituting (5.25), (5.26) and (5.32) to equation (5.31), speed of sound for gas-oil-water
mixture can be written as
( ) ( )( )[ ] ( ) ( )( )[ ]( )[ ] ( ) ( )( )[ ]OTWTGTOWG
OVWVGVOpWpGp
KKKCyCyxCxCyCyxCx
aββααρβρβαρα −+⋅−+⋅⋅⋅−+⋅⋅−+⋅
⋅−+⋅⋅−+⋅⋅−+⋅⋅−+⋅=
11)1()1(11/11
(5.33)
5.5 Attenuation mechanisms of sound wave
When sound spreads trough the media there are a diminution mechanisms of intensity or
attenuation as the distance from source increase due to loses of mostly frictional character.
All media capable of transmitting sound, are limited in extend and sooner or later the wave
must stop or change from a medium to another.
Thermal conductivity and shear viscosity attenuate the wave motion. Both the speed and
attenuation of the sound waves depend on the frequency. General considerations say that
pressure waves will pass through structures if they are of the frequency for which the

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
67
wavelength is larger than the structure. If the structure is a bubble or a slug in gas-liquid flow,
a pressure pulse needs to have a wavelength greater than the size of the bubble and slug to
propagate through the gas-liquid flow (Gudmundsson and Celius 1999).
In multiphase flow there are additional attenuation mechanisms (Falk, 1999) which include:
- viscous drag
- steady interfacial drag
- added mass (interior effect)
- boundary layer around a particle/drop (Basset force)
- interfacial heat exchange
- compressibility of each phase
- concentration gradient effects
- phase transitions
- deformation and fragmentation of bubbles and drops
- reflections at the interface
Knowledge of which of these attenuation mechanisms are the most important can greatly
simplify the models for sound wave propagation. The relative importance, however, depends
on the media, flow pattern and the frequency.
In approach towards zero frequency where all processes take place slowly, the compression
and expansion of the fluid occur reversibly and adiabatically. Trusler (1991) claimed that
boundary-layer absorption was the most important attenuation mechanism for low-frequency
waves in tubes with single phase flow. However, at high frequencies the fluid cannot
maintain local equilibrium. Consequently, some of the energy is dissipated and high
frequency waves will be highly attenuated by reflections of the interfaces and can not
propagate very far in bubbly and slug flow (Falk, 1999). The dominant frequency in low-
pressure air-water flow in pipelines has been shown to be in the range 1-10 Hz (Dong and
Gudmundsson 1993). Similar results were reported by Falk (1998). Therefore, pressure

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
68
waves in gas-liquid flow are infrasonic (lower frequency than audible sound which is about
20,000Hz).
Numerical calculations in bubbly flow showed that the slippage between the phases has little
influence on the wave structure (Falk, 1999), though it can only be neglected when the liquid
viscosity is considerable higher than of water, or if the bubbles are small. In bubbly flow the
main attenuation mechanism was heat exchange between the gas bubbles and surrounding
liquid. Kiefer (1977) showed addition theory that added liquid mass is important for the
pressure wave propagation. Calculations of speed of sound in bubbly flow (McWilliam and
Duggins, 1970) and (Kiefer, 1977) showed that surface tension is important for small bubbles,
while at large bubbles only liquid compressibility is important. Firoozabadi (2000) also
revealed that that capillary pressure may affect the two-phase compressibility only in porous
media at reservoir conditions outside the wellbore where phases interface is curved.
5.6 Concluding remarks
1. The acoustic velocity in steam-water two phase systems is more complicated than for two-
component systems. In two-component system gas being dissolved under high pressure
comes out of solution as the pressure decrease and is characterized by solution gas-oil ratio Rs.
In one component system gas emerges due to evaporation process and if the pressure change
is not of the high frequency the equilibrium is maintained between the phases. As the system
responses with equilibrium for pressure change the temperature effects and mass transfer
between both phases is essential for calculations.
2. The study of models made in this chapter showed that there is not one best model for
acoustic velocity in one component steam-water mixture. The Wood equation was chosen for
calculations. The choice of this model is mainly due to Semenow and Kostern (1964)
experiments that showed a sound velocity in steam water flow agreeing well with those
estimated from Wood’s model. However the other authors show the limitation of this model
in many areas. The speed of sound in oil gas mixtures was calculated from formula

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
69
Developed by Gudmundsson and Dong (1993). This formula is reported by authors to be in
good agreement with measured data.
Both chosen models require the properties of each constituent phase to be known. The
procedure necessary in order to calculate these properties was fully described in this chapter
for both gas-oil and steam-water cases. For oil and gas two-phase flow thermodynamics
compressibility can be readily obtained from simulations performed. Unfortunately software
available for geothermal simulations is not such sophisticated as those available for
petroleum applications and thus steam compressibility need to be calculated from equation
derived in this chapter.
3. The acoustic velocity in liquid single-phase is higher from acoustic velocity in pure gas
phase due to significantly lower compressibility of liquid phase. At the presence of only one
percent by volume gas in the form of gas bubbles the acoustic velocity decreases dramatically
and two-phase system presents different character from each of the constituent phases. The
explanation is the fact that such two-phase system has density of liquid and compressibility
of gas. The calculated acoustic velocities for gas-oil and steam-water mixtures for wide range
of void fraction values are presented on Figure 5.1 and Figure 5.2. The plots also shows that
depression in the sonic velocity is less if the pressure is increased while retaining the same
void fraction, although the sensitivity to change in pressure becomes progressively
diminished.
4. The plots of acoustic velocity vs. void fraction for oil-gas and steam-water systems
revealed different behavior for high void fraction values. For hydrocarbons two-phase fluids
mixture the plot has less slope which becomes more flat as the pressure is higher. For steam-
water mixture this shape is more inclined towards vertical. The calculations made showed out
that this effect may be important for lower pressure values where water dryness has higher
values and steam occupies main volume of the pipe. This high value void fraction changes
has more effect on acoustic velocity than pressure changes and thus acoustic velocity
decrease with pressure increase across the wellbore. This problem will be presented precisely
together with calculations made in Chapter 8.

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
70
5. Gudmundsson and Dong model relate the sonic velocity directly to the properties of the
gases and liquids in the same manner as Wood’s model. In fact assuming that mixture do no
contain water and β = 0, the equation may be expressed in the same form as Wood’s. The
difference is in the approach towards the thermodynamic process that occurs during the
sound propagation.
Compressibility is often defined as the small volume change than occur in closed system at
constant temperature. The second law of the thermodynamics tells that sound propagation
process must be isentropic due to there is no temperature gradient except the wave itself.
Wood’s proposed to calculate speed of sound separately for both phases from isentropic
compressibility. Gudmundsson and Dong equation use the isothermal compressibility and
then transform the equation to the isotropic condition using the specific heats ratio as shown
in equation (5.31). The possible error due to assuming isothermal process instead isentropic is
up to 7% for gas-oil mixtures and even up to 14% for steam-water depending on the pressure.
Table 5.1 contains calculated results for pressure equal 52.4 bar, for gas-oil mixture and
Table 5.2 shows similar calculations for steam-water mixture at the 45.1 bar. The differences
between calculated sound speed values assuming whether isothermal or isentropic process are
also shown in form of plots by Figure 5.3 and 5.4 for gas-oil and steam-water respectively.

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
71
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
acou
stic
vel
ocity
[m/s
]
p = 100.47
p = 52.36
p = 19.45
Figure 5.1 Calculated acoustic velocities Vs void fraction for oil-gas mixture
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
acou
stic
vel
ocity
[m/s
]
p = 45.2 [bar]p = 30 [bar]p = 15 [bar]
Figure 5.2 Calculated acoustic velocities Vs void fraction for steam-water mixture

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
72
Table 5.1 Calculated acoustic velocities for gas-oil mixture.
oil-gas mixture, p = 70.2 [bar]
α a [m/s]
isentropic
a [m/s]
isothermal difference [m/s] %
0.1 268.3 250.8 17.5 6.8
0.3 176.4 164.8 11.6 6.7
0.5 158.5 148.5 10.0 6.5
0.8 178.4 169.0 9.4 5.4
0.9 207.0 198.6 8.4 4.1
0
100
200
300
400
500
600
700
800
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
acou
stic
vel
ocity
[m/s
]
isentripic p = 45.1 [bar]
isothermal p = 45.1 [bar]
isentropic p = 70.2 [bar]
isothermal p = 70.2 [bar]
Figure 5.3 Calculated acoustic velocity for gas-oil mixture assuming isothermal and
isentropic process of sound propagation

5. Speed of Sound in Two-Phase Mixtures __________________________________________________________________________
73
Table 5.2 Calculated acoustic velocity for steam-water mixture.
steam-water mixture, p = 19.4 [bar]
α a [m/s]
isentropic
a [m/s]
isothermal difference [m/s] %
0.1 282.7 247.1 35.6 13.4
0.3 187.3 163.2 24.1 13.8
0.5 170.9 148.8 22.1 13.8
0.8 205.5 179.6 25.9 13.5
0.9 258.0 226.8 31.2 12.9
0
100
200
300
400
500
600
700
800
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
isentropic p = 19.4 [bar]
isothermal p = 19.4 [bar]
isentropic p = 52.4 [bar]
isothermal p =52.4 [bar]
Figure 5.4 Calculated acoustic velocity for steam-water mixture assuming isothermal and
isentropic process of sound propagation

Chapter 6
Case Studies

6. Case Studies __________________________________________________________________________
75
6.1 Calculation purpose
The purpose of these calculations is to estimate water-hammer and line packing effects when
valve has been fully closed. The results from these calculations should give a picture of these
phenomena in two-phase wells. Then similar calculations for oil and geothermal wells may
be compared witch each other. A description of the effect should give a result which can be
linked to field measurements to see if any other factors might affect the pressure gradient
after the valve closure. Offshore Pressure Pulse tests have been made in several North Sea
wells to validate the theoretical simulation. The tests issues were described in two
confidential reports and then published (Gudmundsson and Falk, 1999), (Gudmundsson and
Celius, 1999). Geothermal wells are planed to be tested for Pressure Pulse method in summer
2003.
The water-hammer effect is caused by rapid closure a valve in flowing pipe. The pressure
increase is dependant on fluid density, velocity and sonic velocity in the flowing well as
shown in Chapter 3. These will be calculated here. In liquid flow, line packing is the increase
in pressure caused by a wall friction when a valve is closed and the fluid is stopped by a
pressure wave which is emitted from the valve in the instant of closure. In liquid/gas two-
phase flow, the increase in pressure is the sum of pressure drop due to wall friction and the
pressure drop due to interfacial friction. The interfacial friction is an unknown quantity, while
the frictional pressure drop can be considered a known quantity.

6. Case Studies – oil wells __________________________________________________________________________
76
6.2 Water-hammer and line packing in oil wells
The three programs used were PipeSim 2000, GOW 3.0 and Excel. PipeSim is a multiphase
flow simulator. The futures and modes of the program used in present work are described in
Appendix D. PipeSim simulates the flow of an oil/gas/water mixture in a well or pipeline.
The program takes the well fluid data and uses them to calculate various properties of the
fluid and system. PipeSim was also used for inflow performance (IP) and tubing performance
(VLP) in order to estimate the flowrates for different wellhead pressures.
The GOW program is published by Gulf Publishing Co. Houston, Texas. It allows calculating
the various parameters of many substances including oil, gas and water. The PipeSim output
file does not give the values of oil and gas compressibility and these were found from this
program for given PVT conditions taken from well profile.
The Excel spreadsheet was used in present work for additional calculations of acoustic
velocity. The acoustic velocity was calculated using formula reported by Dong and
Gudmundsson (1993) and given in equation (5.40) in this work. Excel was also used to plot
the results.
The above programs may be substituted by similar programs. Prosper Multiphase Flow
Simulator, designed by Petroleum Experts Ltd. Edinburgh gives similar output files suitable
to present calculations. Only the PipeSim was available at university’s computers thus
calculations placed in this thesis work hail from PipeSim. Excel may be replaced by almost
any spreadsheet that can plot and calculate. Also GOW has equivalent programs.
To run PipeSim the fluid, completion and production data are necessary. The data used in
these simulations for one well was obtained from work of Jonsson (1995). This contains the
data about production, completion and fluid properties from the Draugen oil field. Two other
wells were simulated based on data from work of Falk (1999). These data were gained during
the Pressure Pulse Method tests on Gullfaks and Oseberg platforms. In addition some

6. Case Studies – oil wells __________________________________________________________________________
77
reference values for these oil fields were taken from the Skjæveland and Kleppe Monograph
(1992) that contains the characteristics of the most North Sea fields.
PipeSim was used to determine the properties of the oil and gas at different depths in the
producing well. Simulations gave the values at 50 meter intervals. Oil pressure, temperature,
density, void fraction, gas and oil heat capacities and compressibility are the properties
required to calculate the acoustic velocity. The last two were computed in GOW and then
entered into the Excel spreadsheet. The void fraction is also not given directly in PipeSim
output file but as water cut is 0 (assumed in all simulations done), the void fraction and the
liquid holdup add to one.
Excel was used to plot the results. The depth, acoustic velocity and the pressure drop due to
friction were entered into spreadsheet. The frictional pressure drop is available on the
PipeSim output file. These values are then used to calculate travelling time for a pressure
pulse down to a certain point and up again. Calculated results were plotted against each other.
Depth and time are plotted on the x axis and total pressure drop and acoustic velocity on the y
axis. The total pressure drop versus time gives the effect of line packing.
PipeSim gives the output file compatible with excel format thus the results are presented in
two forms; Excel spreadsheet and Excel plots. Excel spreadsheet contains the calculated
values of various properties affecting the acoustic velocity and line packing listed in columns
and is available from all simulated oil wells in Appendix F of this work. These values were
directly used to plot the results.
Table 6.1 contains the data about the wells that was chosen to illustrate the pressure pulse
method in oil wells. These data include well depth, tubing inner diameters, SCSSV depth and
inner diameters, reservoirs pressures and temperatures necessary to run simulations in
PipeSim. Table 6.2 contains the molecular composition of the well fluids used in simulations.
PipeSim base on the reservoir data to predicts the well flowing pressure at the bottom of the
well and then simulate the flow in vertical well. Table 6.3 presents the calculated parameters.
The wellhead pressures, temperatures and flowrates are presented in the table together with
parameters that make up water-hammer: density, acoustic velocity and flow velocity.

6. Case Studies – oil wells __________________________________________________________________________
78
Table 6.1 Well geometry and reservoir data for computer simulations
WELL SYMBOL A1 A2 B C
Depth H (m) 1893 1893 1952 1924
Tubing ID (inch) 6.184 6.184 4.5 5.125
SCSSV depth (m) 650 650 none none
SCSSV ID (inch) 5.963 5.963 none none
Reservoir pressure pres (bar) 165 165 254 314
Reservoir temperature Tres (oC) 71 71 73 75
Table 6.2 Molecular composition of the well fluids (measured as a mole fraction of the gas
phase at stock-tank conditions)
WELL SYMBOL A1 A2 B C
N2 0.090 0.090 0.307 0.320
CO2 0.280 0.280 0.996 0.620
C1 46.49 46.49 46.323 44.63
C2 6.14 6.14 4.045 3.83
C3 4.60 4.60 0.881 0.94
iC4 0.92 0.92 0.556 0.57
nC4 2.31 2.31 0.511 0.56
iC5 0.99 0.99 0.662 0.6
nC5 1.35 1.35 0.293 0.28
C6 2.04 2.04 1.014 0.92
C7 3.15 3.15 2.869 2.28
C8 3.35 3.35 4.064 4.05
C9 2.18 2.18 3.257 3.36
C10+ 25.54 25.54 34.222 37.04

6. Case Studies – oil wells __________________________________________________________________________
79
Table 6.3 Calculated values at the inlet and wellhead condition
WELL SYMBOL A1 A2 B C
Inlet pressure - pwf (bar) 156 158.5 258.7 228.97
Inlet temperature – Twf (oC) 71 71.0 72.0 72.85
Stock tank oil flow rate - QL (Sm3/day) 7300.0 5125.0 2165 1024.9
Stock tank gas flow rate - QG (million m3/day) 0.3796 0.26651 0.20352 0.0641
Total mass flowrate - m (kg/s) 75.144 52.755 22.708 10.794
Wellhead pressure pwh (bar) 8.95 20.35 123.5 65.12
Void fraction – α 0.827 0.601 0.210 0.252
Mixture density– ρM (kg/m3) 142.5 322.4 616.2 623.5
Fluid mean velocity – u (m/s) 18.438 8.782 2.906 1.607
Acoustic velocity a (m/s) 87.7 102.7 288.4 192.9
Water-hammer ∆pa (bar) 2.30 2.91 5.16 1.93
Figure 6.1 contains two plots that present estimated water-hammer and line packing for oil
wells taken into considerations in present work. The first pressure increase on the plots is the
water hammer effect after valve closure, and then the long line packing shows the pressure
build up due to friction. The rapid pressure increase in line packing starts at the time where
bubble point is reached.

6. Case Studies – oil wells __________________________________________________________________________
80
0
20
40
60
80
100
120
140
160
180
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
time elapsed [s]
pres
sure
[bar
]
Well A1 Well A2
Well C
Well B
0.0
2.5
5.0
7.5
10.0
12.5
15.0
17.5
20.0
22.5
25.0
27.5
30.0
32.5
35.0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
time elapsed [s]
pres
sure
[bar
]
Well B
Well A1 Well A2
Well C
Figure 6.1 Estimated water-hammer and line packing in oil wells

6. Case Studies – oil wells __________________________________________________________________________
81
Calculated results are presented for each well in the form of plots. The list of plots is given
below:
mixture density Vs depth, …………………………………….….... Figure 6.2
void fraction Vs depth………………………………………………. Figure 6.3
densities ratio Vs velocities ratio……………………………......….. Figure 6.4
logarithm of densities ratio Vs logarithm of velocities ratio.............. Figure 6.5
acoustic velocity Vs depth……………………………………….…. Figure 6.6
acoustic velocity Vs time………………………………...…………. Figure 6.7
sum frictional pressure drop Vs depth……………...…..…...……… Figure 6.8
sum frictional pressure drop Vs time……………………..……….... Figure 6.9
pressure (line packing) Vs time……………………………..…..….. Figure 6.10
acoustic velocity Vs void fraction (for increasing pressures)......…... Figure 6.11
elevation Vs pressure……………………………………….....…..... Figure 6.12
The depth is the depth of the point in question below the wellhead. The time elapsed is the
time period it takes for a sound wave to travel to the point in question from the wellhead and
back again, i.e. down and up. The sum frictional pressure drop is the total pressure drop
between the point in question and the wellhead.

6. Case Studies – well A1 __________________________________________________________________________
82
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.2 – A1, mixture density fraction Vs depth
0
10
20
30
40
50
60
70
80
90
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
void
frac
tion
[%]
Figure 6.3 – A1, void fraction Vs depth

6. Case Studies – well A1 __________________________________________________________________________
83
0
10
20
30
40
50
60
70
80
90
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4velocities ratio (slip) vG/vL
dens
ities
ratio
DL/
DG
bubble II
bubble I
liquid only
Transition of f low pattern f low revealed on this plot, it w as not reported in simulator output f ile.
Figure 6.4 – A1, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vG/vL)
dens
ities
ratio
log(
DL/
DG)
bubble I
bubble II
Figure 6.5 – A1, logarithm of densities ratio Vs logarithm velocities ratio

6. Case Studies – well A1 __________________________________________________________________________
84
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
acou
stic
vel
ocity
[m/s
]
Figure 6.6 – A1, acoustic velocity Vs depth
0
200
400
600
800
1000
1200
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15time [s]
acou
stic
vel
ocity
[m/s
]
Figure 6.7 – A1, acoustic velocity Vs time

6. Case Studies – well A1 __________________________________________________________________________
85
0
2
4
6
8
10
12
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.8 – A1, sum of frictional pressure drop Vs depth
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
time [s]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]

6. Case Studies – well A1 __________________________________________________________________________
86
Figure 6.9 – A1, sum of frictional pressure drop Vs time
0
2
4
6
8
10
12
14
16
18
20
22
24
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18time elapsed [s]
pres
sure
[bar
]
0
1
1
2
2
3
3
4
4
5
5
time differential dp/dt
line packing
time differential
Figure 6.10 – A1, line packing and time differential

6. Case Studies – well A1 __________________________________________________________________________
87
Calculated acoustic velocities for subsequent pressures across the wellbore
50
100
150
200
250
300
350
400
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9void fraction
soni
c ve
loci
ty [m
/s]
750m
600m
450m
300m
150m
0m
path
Figure 6.11 – A1, acoustic velocity Vs void fraction (for increasing pressure)
Figure 6.12 – A1, elevation Vs pressure

6. Case Studies – well A2 __________________________________________________________________________
88
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.2 – A2, mixture density fraction Vs depth
0
10
20
30
40
50
60
70
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
void
frac
tion
[%]
Figure 6.3 – A2, void fraction Vs depth

6. Case Studies – well A2 __________________________________________________________________________
89
0
5
10
15
20
25
30
35
40
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4velocities ratio (slip) vG/vL
dens
ities
ratio
DL/
DG
Transition betw een liquid, bubble and slug f low
bubble
slug
liquid only
Figure 6.4 – A2, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vG/vL)
dens
ities
ratio
log(
DL/
DG
)
Figure 6.5 – A2, logarithm of densities ratio Vs logarithm velocities ratio

6. Case Studies – well A2 __________________________________________________________________________
90
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
acou
stic
vel
ocity
[m/s
]
Figure 6.6 – A2, acoustic velocity Vs depth
0
200
400
600
800
1000
1200
0 1 2 3 4 5 6 7 8 9 10 11 12
time [s]
acou
stic
vel
ocity
[m/s
]
Figure 6.7 – A2, acoustic velocity Vs time

6. Case Studies – well A2 __________________________________________________________________________
91
0
2
4
6
8
10
12
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.8 – A2, sum of frictional pressure drop Vs depth
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10 11 12
time [s]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.9 – A2, sum of frictional pressure drop Vs time

6. Case Studies – well A2 __________________________________________________________________________
92
0
5
10
15
20
25
30
35
40
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
time elapsed [s]
pres
sure
[bar
]
0
1
2
3
4
5
6
7
time differential dp/dt
line packing
time differential
Figure 6.10 – A2, line packing and time differential

6. Case Studies – well A2 __________________________________________________________________________
93
Calculated sonic velocities
80
130
180
230
280
330
380
430
480
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9void fraction
soni
c ve
loci
ty [m
/s]
600m
500m
400m
300m
200m
100m
0m
path
Figure 6.11 – A2, acoustic velocity Vs void fraction (for increasing pressure)
Figure 6.12 – A2, elevation Vs pressure

6. Case Studies – well B __________________________________________________________________________
94
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000depth [m]
mix
ture
den
sity
[%]
Figure 6.2 – B, mixture density fraction Vs depth
0
5
10
15
20
25
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
void
frac
tion
[%]
Figure 6.3 – B, void fraction Vs depth

6. Case Studies – well B __________________________________________________________________________
95
0
1
2
3
4
5
6
7
8
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6velocities ratio (slip) vG/vL
dens
ities
ratio
DL/
DG
liquid only
bubble f low
Figure 6.4 – B, densities ratio Vs velocities ratio
0
10.1 1.0
velocities ratio (slip) log(vs/vw)
dens
ities
ratio
log(
Dw
/Ds)
.
Figure 6.5 – B, logarithm of densities ratio Vs logarithm velocities ratio

6. Case Studies – well B __________________________________________________________________________
96
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
acou
stic
vel
ocity
[m/s
]
Figure 6.6 – B, acoustic velocity Vs depth
0
200
400
600
800
1000
1200
1400
0 1 2 3 4 5 6 7 8
time [s]
acou
stic
vel
ocity
[m/s
]
Figure 6.7 – B, acoustic velocity Vs time

6. Case Studies – well B __________________________________________________________________________
97
0
5
10
15
20
25
30
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.8 – B, sum of frictional pressure drop Vs depth
0
5
10
15
20
25
30
0 1 2 3 4 5 6 7 8
time [s]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.9 – B, sum of frictional pressure drop Vs time

6. Case Studies – well B __________________________________________________________________________
98
60
70
80
90
100
110
120
130
140
150
160
170
180
190
0 1 2 3 4 5 6 7 8 9 10time elapsed [s]
pres
sure
[bar
]
0
2
4
6
8
10
12
time differential dp/dt
line packing
time differential
bubble point pressure
Figure 6.10 – B, line packing and time differential

6. Case Studies – well B __________________________________________________________________________
99
Calculated acoustic velocities for subsequent pressures across the wellbore
0
200
400
600
800
1000
1200
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
1700m 1400m 1100m 800m 500m 200m 0mpath
Figure 6.11 – B, acoustic velocity Vs void fraction (for increasing pressure)
Figure 6.12 – B, elevation Vs pressure

6. Case Studies – well C __________________________________________________________________________
100
0
100
200
300
400
500
600
700
800
900
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.2 – A1, mixture density fraction Vs depth
0
5
10
15
20
25
30
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
void
frac
tion
[%]
Figure 6.3 – A1, void fraction Vs depth

6. Case Studies – well C __________________________________________________________________________
101
0
2
4
6
8
10
12
14
16
18
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6velocities ratio (slip) vG/vL
dens
ities
ratio
DL/
DG
bubble
liquid only
Figure 6.4 – A1, densities ratio Vs velocities ratio
0.1
1.0
10.0
0.000001 0.000010 0.000100 0.001000 0.010000 0.100000 1.000000velocities ratio (slip) log(vG/vL)
dens
ities
ratio
log(
DL/
DG
)
f low transition bubble
Figure 6.5 – A1, logarithm of densities ratio Vs logarithm velocities ratio

6. Case Studies – well C __________________________________________________________________________
102
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
acou
stic
vel
ocity
[m/s
]
Figure 6.6 – A1, acoustic velocity Vs depth
0
200
400
600
800
1000
1200
0 1 2 3 4 5 6 7 8 9
time [s]
acou
stic
vel
ocity
[m/s
]
Figure 6.7 – A1, acoustic velocity Vs time

6. Case Studies – well C __________________________________________________________________________
103
0
1
2
3
4
5
6
0 200 400 600 800 1000 1200 1400 1600 1800 2000
depth [m]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.8 – A1, sum of frictional pressure drop Vs depth
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8 9
time [s]
sum
fric
tiona
l pre
ssur
e dr
op [b
ar]
Figure 6.9 – A1, sum of frictional pressure drop Vs time

6. Case Studies – well C __________________________________________________________________________
104
64
65
66
67
68
69
70
71
72
73
74
0 1 2 3 4 5 6 7 8 9 10 11
time elapsed [s]
pres
sure
[bar
]
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
time differential dp/dt
line packing
time differential
Figure 6.10 – A1, line packing and time differential

6. Case Studies – well C __________________________________________________________________________
105
Calculated acoustic velocities for subsequent pressures across the wellbore
100
200
300
400
500
600
700
800
900
1000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
1050m 900m 700m 500m 300m 100m 0mpath
Figure 6.11 – A1, acoustic velocity Vs void fraction (for increasing pressure)
Figure 6.12 – A1, elevation Vs pressure

6. Case Studies – geothermal wells __________________________________________________________________________
106
6.3 Water-hammer and line packing in geothermal wells
Two programs used in this case were HOLA 3.1 wellbore simulator, and Excel (also
MATHLAB 6.0 and GOW 3.0 but in limited single tasks). The features and modes of HOLA
program that was used in present work are described in Appendix E. The program requires
the well and feedzone parameters in order to calculate the various parameters of fluid and
system in wellbore. This program was also used for inflow performance (IP) and tubing
performance (VLP) purposes in order to estimate the flow parameters for different tubing size
(13⅜ and 9⅝”). The wellhead pressure was assumed to have the same value for both tubing
diameters, thus the mass flowrate must be different. Calculation confirmed that increase in
tubing size from 9⅝” to 13⅜ can bring the almost double output what justify economically
drilling such wide wells. The 13⅜” wide configuration is widely adopted in Iceland but
literature shows that 9⅝” may be considered as typical pipe diameter for high enthalpy liquid
dominated geothermal wells worldwide. That was the purpose of including the both tubing
sizes in simulations. The IP (inflow performance) curves could not be calculated directly
from HOLA and some special approach was used that is described in Appendix E. The Excel
spreadsheet was used to perform the calculations and plot the results.
The data for simulations were assumed base on information about two Iceland fields -
Reykjanes and Svartsengi, (Gudmundsson, 2003). The data include information about
average reservoir pressure and temperature, well and producing fractures depth, casing
program and wellhead production parameters. The additional like enthalpies and
productivity-indexes was computed using HOLA simulator. The wells D and E are
representing the same field thus input parameters and simulated results are similar. The wells
indicated with F are based on data from a different field thus properties and results may be
expected to vary from the previous wells.
The HOLA simulator gives the limited number of fluid properties as compared to PipeSim,
but those obtained were sufficient to continue the necessary calculations in Excel spreadsheet.
HOLA output text file gives calculated well profile containing values of pressure,
temperature, enthalpy, dryness, density, and velocity of each phase separately. The steam

6. Case Studies – geothermal wells __________________________________________________________________________
107
void fraction was calculated from equation (4.5), and then the mixture density, viscosity and
enthalpy was computed from relations (4.7), (4.8), (4.9) respectively.
Acoustic velocity was obtained from Wood’s formula given as (5.21) in present work. In
single liquid phase flow sonic velocity depends mostly on water compressibility whether in
two phase region the sonic velocity is highly dependant on steam compressibility and water
compressibility has much less impact.
The steam properties in geothermal well follows the saturation line as the system tends to
remain in equilibrium between both phases. These properties are given is steam tables, what
is obviously inconvenient for computer calculations. Michaelides (1981) proposed the
polynomial expressions to solve this inconvenience problem. In present work CalcSoft 3.0
the shareware program written by M.L. McGuire was used in computations of steam and
water heat capacities at constant pressure and volume. Isothermal compressibility KTW of the
water phase was possible to compute from GOW program and the isothermal compressibility
of steam fraction was calculated from formula suitable for computer calculations, derived in
chapter 5 and finally given by the equation (5.24). The acoustic velocity allows then calculate
the travelling time of pressure pulse down to a certain point and back again.
Frictional pressure drop across the wellbore is the required value for line packing calculations.
From HOLA program only total pressure drop across the wellbore is available, thus the
friction factor f was computed for given pipe roughness from empirical formula proposed by
Haalad (Stetfjerding, 1998)
n
sn
dk
nf
⋅
⎟⎠
⎞⎜⎝
⎛⋅
+⎟⎠⎞
⎜⎝⎛⋅−=
11.1
75.3Re9.6log8.11 (6.1)
where n = 1 for gradual transition between the smooth and rough flow, or n = 3 that is
suitable for gas pipelines. The Reynolds number is given by the equitation (4.26), ks is the
wall roughness and d pipe diameter. Pressure drop due to friction may be calculated from

6. Case Studies – geothermal wells __________________________________________________________________________
108
Darcy-Weisbach equation given as (2.6). The total pressure drop versus time gives the effect
of line packing.
Calculated values were then plotted in Excel. Depth and time are plotted on the x axis and
total pressure drop and acoustic velocity on the y axis. The results are presented it two forms
Excel spreadsheet and Excel plots. Excel spreadsheet contains the calculated values of
various properties affecting the acoustic velocity and line packing listed in columns and is
available in Appendix G for all simulated geothermal wells. These values were directly used
to plot the results.
Table 6.4 contains geothermal wells data used in present calculations. The table include well
depths, reservoir parameters and two stage tubing diameters. Calculated parameters are
presented in Table 6.5 which includes wellhead conditions and parameters that make up
water-hammer at the wellhead.
Estimated water-hammer and line packing in geothermal wells are shown in the form of plots.
The Figure 6.13 presents the results for the wells taken into consideration in present work, the
water-hammer pressure increase starts from the actual calculated wellhead pressure. Line
packing in the case of geothermal wells contains both bubble point and diameter change
effects. These effects are discussed precisely in the next chapter. Figure 6.14 shows the same
plots but the pressure on the y axis is the only pressure increase due to water-hammer and
friction effects, beginning from the 0 pressure value. Figure 6.15 presents only the water-
hammer pressure increase after a valve closure.

6. Case Studies – geothermal wells __________________________________________________________________________
109
Table 6.4 Reservoir and geometry input data for computer simulations
WELL D1 D2 E1 E2 F1 F2
Depth (m) 2028 2028 2228 2228 1450 1450
Reservoir Pressure pr (bar) 197.8 197.8 198 198 100 100
Reservoir Temperature Tr (oC) 309.6 309.6 309.7 309.7 263.1 263.1
Downhole pressure pwf (bar) 176.3 179.3 174.3 183.7 83.1 90.2
Enthalpy at the feedzone h (kJ/kg) 1389 1389 1390 1284 1150 1129
Productivity Index PI (E-12·kg/s/m3) 2.39 2.39 1.25 1.25 3.61 3.61
Production casing ID (inch) 13 ⅜ 9 ⅝ 13 ⅜ 9 ⅝ 13 ⅜ 9 ⅝
Slotted liner ID (inch) 9 ⅝ 7 9 ⅝ 7 9 ⅝ 7
Liner from depth (m) 750 750 750 750 750 750
Table 6.5 Calculated values at the wellhead conditions
WELL D1 D2 E1 E2 F1 F2
Wellhead pressure pwh (bar) 45.17 44.7 31.94 31.93 15.02 15.06
Wellhead temperature Twh (oC) 257.6 257.0 237.3 237.3 198.3 198.5
Wellhead enthalpy hwh (kJ/kg) 1275.7 1255.4 1198.7 1168.9 1082.1 1051.0
Total mass flow m (kg/s) 42.61 25.98 49.87 30.28 47.15 28.46
Void fraction α 0.615 0.628 0.640 0.722 0.878 0.879
Fluid mean velocity (m/s) 1.48 1.18 1.80 2.21 4.61 5.46
Mixture density (kg/m3) 317.1 307.6 304.4 239.1 112.6 111.4
Acoustic velocity (m/s) 152.6 152.6 128.1 136.0 123.4 123.8
Water-hammer ∆pa (bar) 0.716 0.848 0.703 0.880 0.641 0.754

6. Case Studies – geothermal wells __________________________________________________________________________
110
10
13
16
19
22
25
28
31
34
37
40
43
46
49
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19time elapsed [s]
pres
sure
[bar
]
Well D1 Well D2
Well E1
Well F1
Well E2
Well F2
Figure 6.13 Estimated water-hammer and line packing in geothermal wells

6. Case Studies – geothermal wells __________________________________________________________________________
111
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
2.25
2.50
2.75
3.00
3.25
3.50
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
time elapsed [s]
pres
sure
[bar
]
Well E1
Well D1
Well D2
Well E2
Well F1
Well F2
Figure 6.14 Estimated water-hammer and line packing in geothermal wells

6. Case Studies – geothermal wells __________________________________________________________________________
112
0.00
0.11
0.22
0.33
0.44
0.55
0.66
0.77
0.88
0.99
1.10
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8time elapsed [s]
wat
er -
ham
mer
pre
ssur
e [b
ar]
Well D1Well D2Well E1Well E2Well F1Well F2
Figure 6.15 Estimated water-hammer magnitudes in geothermal wells
(valve is assumed to close completely in 0.5 s)

6. Case Studies – geothermal wells __________________________________________________________________________
113
Calculated results are presented for each well in the form of plots. The list of plots is given
below:
VLP deliverability curves………………………………………...… Figure 6.16
pressure and temperature well profile…………………………......... Figure 6.17
mixture density Vs depth…………………………………………….Figure 6.18
void fraction Vs depth…………………………………………….… Figure 6.19
densities ratio Vs velocities ratio………………………………….... Figure 6.20
logarithm of densities ratio Vs logarithm of velocities ratio……….. Figure 6.21
acoustic velocity Vs depth………………………………………….. Figure 6.22
acoustic velocity Vs time ……………………………………….….. Figure 6.23
frictional pressure drop per 10 (m) Vs depth……………………….. Figure 6.24
sum frictional pressure drop Vs depth……………………………… Figure 6.25
sum frictional pressure drop Vs time……………………………….. Figure 6.26
pressure (line packing) Vs time ……………………………………. Figure 6.27
acoustic velocity Vs void fraction (for increasing pressures) …….... Figure 6.28
acoustic velocity Vs void fraction (for increasing pressures),
scaled up plot (only F1 and F2 wells) …………………………….... Figure 6.29
The depth is the depth of the point in question below the wellhead. The time elapsed is the
time period it takes for a sound wave to travel to the point in question from the wellhead and
back again, i.e. down and up. The frictional pressure drop per 10 meters is the pressure loss
due to wall friction at this distance. The sum frictional pressure drop is the total pressure
drop between the point in question and the wellhead.

6. Case Studies – well D1 __________________________________________________________________________
114
020406080
100120140160180200220240260280300320
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
m [kg/s]
Pwf [
bar]
95/8 ''
133/8 ''
Figure 6.16 – D1, well inflow and tubing performance
Figure 6.17 – D1, simulated well pressure and temperature profile

6. Case Studies – well D1 __________________________________________________________________________
115
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.18 – D1, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
void
frac
tion
Figure 6.19 – D1, void fraction Vs well depth

6. Case Studies – well D1 __________________________________________________________________________
116
0
5
10
15
20
25
30
35
40
0.0 0.5 1.0 1.5 2.0 2.5velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Figure 6.20 – D1, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
rat
io lo
g(D
w/D
s)
Transition between bubble and slug flow
Figure 6.21 – D1, logarithm of densities ratio Vs logarithm of velocities ratio

6. Case Studies – well D1 __________________________________________________________________________
117
0
200
400
600
800
1000
1200
1400
1600
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – D1, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
1600
0 1 2 3 4 5 6 7 8 9 10time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.23 – D1, acoustic velocity Vs time

6. Case Studies – well D1 __________________________________________________________________________
118
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m]
diameter change discontinuity from 133/8 to 95/8
f irst bubble appears
Figure 6.24 – D1, frictional pressure drop at 10 m distance Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.25 – D1, sum of frictional pressure drop Vs well depth

6. Case Studies – well D1 __________________________________________________________________________
119
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
0 1 2 3 4 5 6 7 8 9 10time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.26 – D1, sum of frictional pressure drop Vs time
45.0
45.2
45.4
45.6
45.8
46.0
46.2
46.4
46.6
46.8
0 1 2 3 4 5 6 7 8 9 10 11 12time [m]
Pres
sure
[bar
]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
time differential dp/dt
line packing
time differential
Figure 6.27 – D1, estimated water – hammer and line packing at the wellhead,
(together with time differentialdtdp )

6. Case Studies – well D1 __________________________________________________________________________
120
130
170
210
250
290
330
370
410
450
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
acou
stic
vel
ocity
[m/s
]
0 m100 m200 m300 m400 m500 m600 m640 m660 mpath
Figure 6.28 – D1, Calculated sonic velocities for varying pressure across the well depth Plot presents void fraction Vs acoustic velocity changes across the well depth.
Sudden change in void fraction is caused by computational discontinuity at the 230m depth

6. Case Studies – well D2 __________________________________________________________________________
121
020406080
100120140160180200220240260280300320
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340
m [kg/s]
Pwf [
bar]
95/8 ''
133/8 ''
Figure 6.16 – D2, well inflow and tubing performance
Figure 6.17 – D2, simulated well pressure and temperature profile

6. Case Studies – well D2 __________________________________________________________________________
122
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.18 – D2, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
void
frac
tion
Figure 6.19 – D2, void fraction Vs well depth

6. Case Studies – well D2 __________________________________________________________________________
123
0
5
10
15
20
25
30
35
40
0.0 0.5 1.0 1.5 2.0 2.5velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Figure 6.20 – D2, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
rat
io lo
g(D
w/D
s)
Transition between bubble and slug flow
Figure 6.21 – D2, logarithm of densities ratio Vs logarithm of velocities ratio

6. Case Studies – well D2 __________________________________________________________________________
124
0
200
400
600
800
1000
1200
1400
1600
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – D2, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
1600
0.0 2.0 4.0 6.0 8.0 10.0time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.23 – D2, acoustic velocity Vs time

6. Case Studies – well D2 __________________________________________________________________________
125
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m]
diameter change from9 3/8'' to 7''
f irst bubble appears
Figure 6.24 – D2, frictional pressure drop at 10 m distance Vs well depth
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.25 – D2, sum of frictional pressure drop Vs well depth

6. Case Studies – well D2 __________________________________________________________________________
126
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
0 1 2 3 4 5 6 7 8 9 10time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.26 – D2, sum of frictional pressure drop Vs time
44.5
45.0
45.5
46.0
46.5
47.0
47.5
0 1 2 3 4 5 6 7 8 9 10 11time [m]
Pres
sure
[bar
]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
time differential dp/dt
line packing
time differential
Figure 6.27 – D2, estimated water – hammer and line packing at the wellhead
(together with time differentialdtdp )

6. Case Studies – well D2 __________________________________________________________________________
127
130
170
210
250
290
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m550 m570 m590 mpath
Figure 6.28 – D2, calculated sonic velocities for varying pressure across the well depth
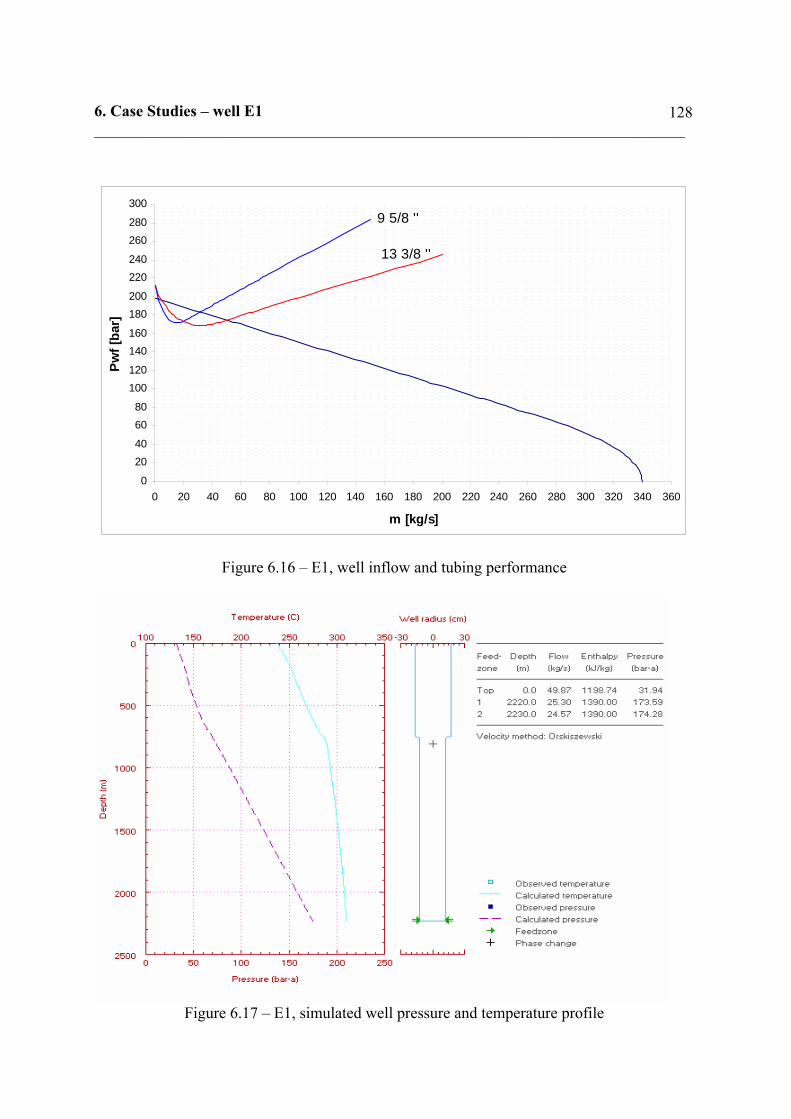
6. Case Studies – well E1 __________________________________________________________________________
128
0
2040
6080
100120
140160
180200
220240
260280
300
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
m [kg/s]
Pwf [
bar]
9 5/8 '' 13 3/8 ''
Figure 6.16 – E1, well inflow and tubing performance
Figure 6.17 – E1, simulated well pressure and temperature profile

6. Case Studies – well E1 __________________________________________________________________________
129
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.18 – E1, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.19 – E1, void fraction Vs well depth

6. Case Studies – well E1 __________________________________________________________________________
130
0
10
20
30
40
50
60
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Figure 6.20 – E1, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
rat
io lo
g(D
w/D
s)
Transition between the bubble flow and slug flow(discountinuity at the flow patterns boundary)
Figure 6.21 – E1, logarithm of densities ratio Vs logarithm of velocities

6. Case Studies – well E1 __________________________________________________________________________
131
0
200
400
600
800
1000
1200
1400
1600
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – E1, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
1600
0 1 2 3 4 5 6 7 8 9 10 11 12 13time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.23 – E1, acoustic velocity Vs time

6. Case Studies – well E1 __________________________________________________________________________
132
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.010
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m]
f irst bubble appears
diameter change from 13 3/8" to 9 5/8"
Figure 6.24 – E1, frictional pressure drop at 10 m distance Vs well depth
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.25 – E1, sum of frictional pressure drop Vs well depth

6. Case Studies – well E1 __________________________________________________________________________
133
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
0 1 2 3 4 5 6 7 8 9 10 11 12 13time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.26 – E1, sum of frictional pressure drop Vs time
31.5
32.0
32.5
33.0
33.5
34.0
34.5
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15time [m]
Pres
sure
[bar
]
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
time differential dp/dt
line packing
time differential dp/dt
Figure 6.27 – E1, estimated water – hammer and line packing at the wellhead
(together with time differentialdtdp )

6. Case Studies – well E1 __________________________________________________________________________
134
110
150
190
230
270
310
350
390
430
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m600 m700 m750 m790 mpath
Figure 6.28 – E1, calculated sonic velocities for varying pressure across the well depth

6. Case Studies – well F1 __________________________________________________________________________
135
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
300
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
m [kg/s]
Pwf [
bar]
9 5/8 '' 13 3/8 ''
Figure 6.16 – E2, well inflow and tubing performance
Figure 6.17 – E2, simulated well pressure and temperature profile

6. Case Studies – well F1 __________________________________________________________________________
136
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.18 – E2, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
void
frac
tion
Figure 6.19 – E2, void fraction Vs well depth
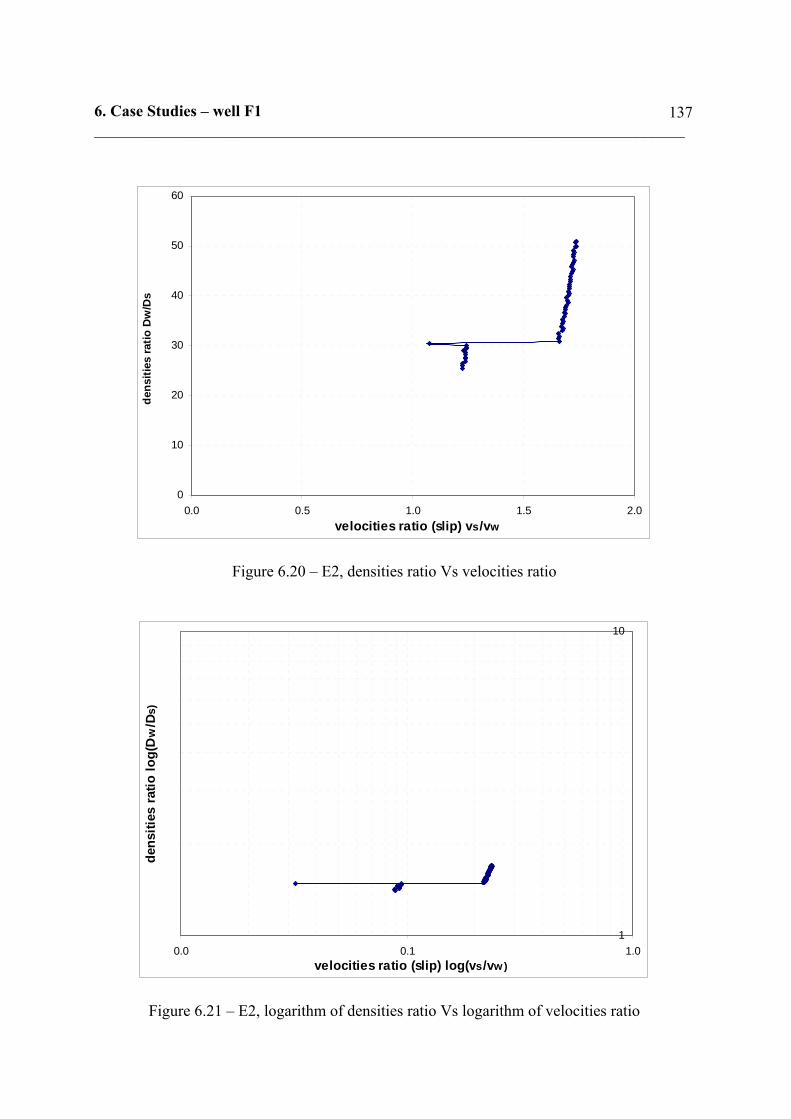
6. Case Studies – well F1 __________________________________________________________________________
137
0
10
20
30
40
50
60
0.0 0.5 1.0 1.5 2.0velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Figure 6.20 – E2, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
ratio
log(
Dw
/Ds)
Figure 6.21 – E2, logarithm of densities ratio Vs logarithm of velocities ratio

6. Case Studies – well F1 __________________________________________________________________________
138
0
200
400
600
800
1000
1200
1400
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – E2, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
0 1 2 3 4 5 6 7 8 9 10 11time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.23 – E2, acoustic velocity Vs time

6. Case Studies – well F1 __________________________________________________________________________
139
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m] diameter change
from 13 3/8" to 9 5/8"
f irst bubble appears
Figure 6.24 – E2, frictional pressure drop at 10 m distance Vs well depth
0.0
0.5
1.0
1.5
2.0
2.5
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.25 – E2, sum of frictional pressure drop Vs well depth

6. Case Studies – well F1 __________________________________________________________________________
140
0.00
0.50
1.00
1.50
2.00
2.50
0 1 2 3 4 5 6 7 8 9 10 11time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.26 – E2, sum of frictional pressure drop Vs time
31.5
32.0
32.5
33.0
33.5
34.0
34.5
35.0
35.5
0 1 2 3 4 5 6 7 8 9 10 11 12time [m]
Pre
ssur
e [b
ar]
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
time differential dp/dt
line packing
time diferential
bubble point
Figure 6.27 – E2, estimated water – hammer and line packing at the wellhead
(together with time differentialdtdp )

6. Case Studies – well F1 __________________________________________________________________________
141
110
150
190
230
270
310
350
390
430
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m550 mpath
Figure 6.27 – E2, calculated sonic velocities for varying pressure across the well depth

6. Case Studies – well F1 __________________________________________________________________________
142
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100 120 140 160 180 200 220 240 260
m [kg/s]
Pwf [
bar]
13 3/8 '' 9 5/8 ''
Figure 6.16 – F1, well inflow and tubing performance
Figure 6.17 – F1, simulated well pressure and temperature profile
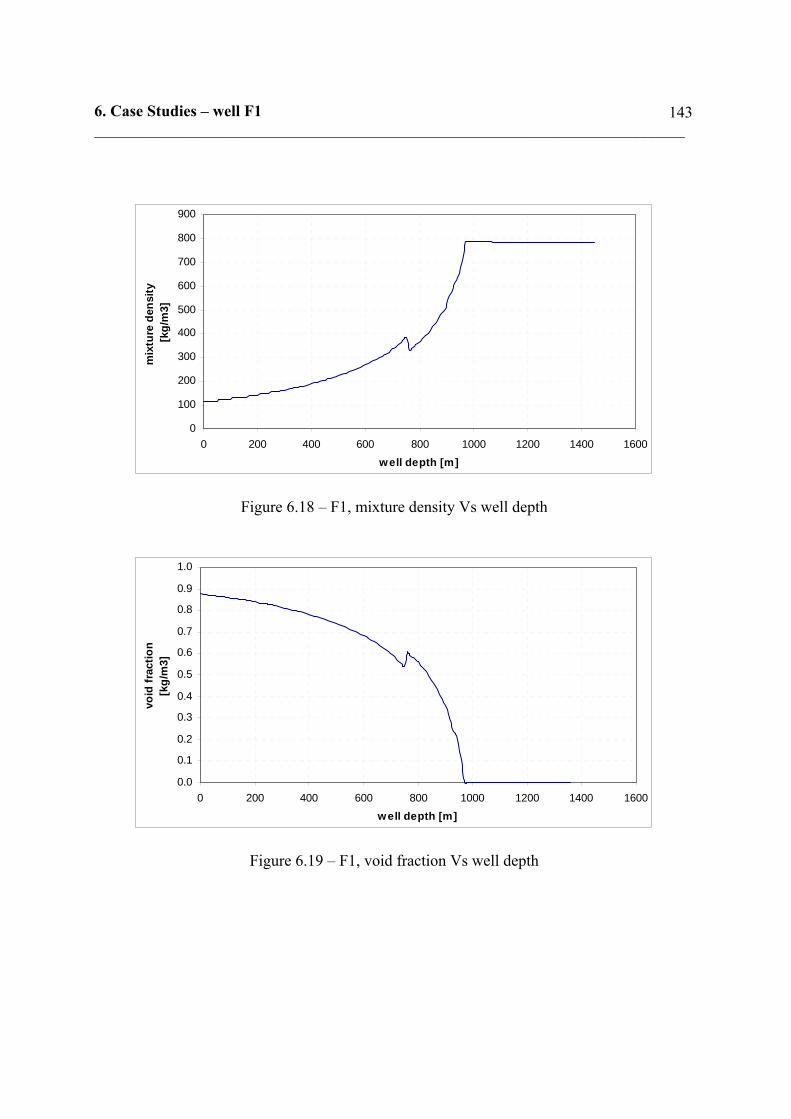
6. Case Studies – well F1 __________________________________________________________________________
143
0
100
200
300
400
500
600
700
800
900
0 200 400 600 800 1000 1200 1400 1600
well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.18 – F1, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600
well depth [m]
void
frac
tion
[kg/
m3]
Figure 6.19 – F1, void fraction Vs well depth

6. Case Studies – well F1 __________________________________________________________________________
144
0
20
40
60
80
100
120
0.0 0.5 1.0 1.5 2.0 2.5velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Figure 6.20 – F1, densities ratio Vs velocities ratio
1
10
0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
ratio
log(
Dw
/Ds)
Transition between bubble and slug flow and discontinuity at the flow patterns boundary
Figure 6.21 – F1, logarithm of densities ratio Vs logarithm of velocities ratio

6. Case Studies – well F1 __________________________________________________________________________
145
0
200
400
600
800
1000
1200
1400
0 200 400 600 800 1000 1200 1400 1600well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – F1, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
0 2 4 6 8 10 12 14 16 18 20time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.23 – F1, acoustic velocity Vs time

6. Case Studies – well F1 __________________________________________________________________________
146
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m]
f irst bubble appears
Diameter change from 13 3/8'' for 9 5/8''
Figure 6.24 – F1, frictional pressure drop at 10 m distance Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.25 – F1, sum of frictional pressure drop Vs well depth

6. Case Studies – well F1 __________________________________________________________________________
147
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.26 – F1, sum of frictional pressure drop Vs time
14.8
15.0
15.2
15.4
15.6
15.8
16.0
16.2
16.4
16.6
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19time [m]
Pres
sure
[bar
]
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
time differential dp/dt
line packing
time differential
diameter change
bubble point
Figure 6.27 – F1, estimated water – hammer and line packing at the wellhead
(together with time differentialdtdp )

6. Case Studies – well F1 __________________________________________________________________________
148
80
100
120
140
160
180
200
220
240
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m600 m700 m800 m900 m960 mpath
Figure 6.28 – F1, calculated sonic velocities for varying pressure across the well depth
Calculated sonic velocities
110
115
120
125
130
135
140
0.5 0.6 0.7 0.8 0.9 1
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m600 m700 m800 mpath
void fraction
Figure 6.29 – F1, calculated sonic velocities for varying pressure across the well depth - scaled up.
The same plot scaled up. Acoustic velocity decreases although pressure increases across wellbore. It is caused by void fraction decrease which more affects acoustic velocity value than pressure for right-hand void values above α = 0

6. Case Studies – well F2 __________________________________________________________________________
149
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100 120 140 160 180 200 220 240 260
m [kg/s]
Pwf [
bar]
13 3/8 '' 9 5/8 ''
Figure 6.16 – F2, well inflow and tubing performance
Figure 6.16 – F2, simulated well pressure and temperature profile

6. Case Studies – well F2 __________________________________________________________________________
150
0
100
200
300
400
500
600
700
800
900
0 200 400 600 800 1000 1200 1400 1600well depth [m]
mix
ture
den
sity
[kg/
m3]
Figure 6.17 – F2, mixture density Vs well depth
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 200 400 600 800 1000 1200 1400 1600well depth [m]
void
frac
tion
Figure 6.18 – F2, void fraction Vs well depth

6. Case Studies – well F2 __________________________________________________________________________
151
0
20
40
60
80
100
120
0.0 0.5 1.0 1.5 2.0velocities ratio (slip) vs/vw
dens
ities
ratio
Dw
/Ds
Flow patern changes from liquid only to bubble f low and then to slug f low , at the diameter change f low comes back to bubbly f low and then transforms into slug again
Figure 6.19 – F2, densities ratio Vs velocities ratio
1
10
0.0 0.0 0.1 1.0velocities ratio (slip) log(vs/vw)
dens
ities
rat
io lo
g(D
w/D
s)
Figure 6.20 – F2, logarithm of densities ratio Vs logarithm of velocities ratio

6. Case Studies – well F2 __________________________________________________________________________
152
0
200
400
600
800
1000
1200
1400
0 200 400 600 800 1000 1200 1400 1600well depth [m]
acus
tic v
eloc
ity[m
/s]
Figure 6.21 – F2, acoustic velocity Vs well depth
0
200
400
600
800
1000
1200
1400
0 2 4 6 8 10 12 14 16 18 20time [s]
acus
tic v
eloc
ity[m
/s]
Figure 6.22 – F2, acoustic velocity Vs time

6. Case Studies – well F2 __________________________________________________________________________
153
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0.018
0 200 400 600 800 1000 1200 1400 1600 1800 2000well depth [m]
fric
tiona
l pre
ssur
e dr
op p
er 1
0m
[bar
/m] f irst bubble
appears
Diameter change from 13 3/6'' for 9 5/8''
Figure 6.23 – F2, frictional pressure drop at 10 m distance Vs well depth
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0 200 400 600 800 1000 1200 1400 1600well depth [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
/m]
Figure 6.24 – F2, sum of frictional pressure drop Vs well

6. Case Studies – well F2 __________________________________________________________________________
154
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16time [m]
Sum
fric
tiona
l pre
ssur
e dr
op
[bar
]
Figure 6.25 – F2, sum of frictional pressure drop Vs time
14.5
15.0
15.5
16.0
16.5
17.0
17.5
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17time [m]
Pres
sure
[bar
]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6tim
e di
ffer
entia
lline packing
time differential
diameter change
single phase
Figure 6.26 – F2, estimated water – hammer and line packing at the wellhead
(together with time differentialdtdp )

6. Case Studies – well F2 __________________________________________________________________________
155
80
100
120
140
160
180
200
220
240
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m600 m700 m800 m830 mpath
Figure 6.27 – F2, calculated sonic velocities for varying pressure across the well depth
110
115
120
125
130
135
140
0.5 0.6 0.7 0.8 0.9 1void fraction
soni
c ve
loci
ty [m
/s]
0 m100 m200 m300 m400 m500 m600 m700 m800 m830 mpath
Figure 6.28 – F2, calculated sonic velocities for varying pressure across the well depth
- scaled up. The same plot scaled up. Acoustic velocity decreases although pressure increases across wellbore. It is caused by void fraction decrease which more affects acoustic velocity value than pressure for right-hand void values
above 0.7.

Chapter 7
Discussion

7. Discussion __________________________________________________________________________
157
This chapter discuss the results of the calculations performed in present work and shown in
the form of plots. The theoretical explanation is given to the all effect observed on estimated
line packing and conclusions are linked to the field measurements. The discussion includes
the theoretical models used in calculations and verifies their limitations. The results obtained
for both oil and geothermal wells are compared to each other in order to find whether there
are other factors that may influence water-hammer and line packing in geothermal wells.
7.1 Multiphase flow correlations
In all well examples taken in considerations in present work both oil and geothermal, fluid
enters the wellbore as single liquid phase. As the average pressure and temperature existing
in tubing decrease towards the wellhead a second phase emerges due to gas coming out of the
solution in the oil wells or steam flashing in geothermal wells at the bubble point pressure.
For single phase flow physical scale and fluid property effects can be easy investigated using
mathematical modelling. For two-phase flow this is not the case. Because of the increased
number of flow conditions and flow parameters can only be obtained using wholly empirical
and semi-empirical correlations and great care must be exercised when considering the
results.
In present work two correlations was used in order to predict the pressure gradient and flow
patterns in simulated wells. The Duns and Ros correlation for oil wells and the Orkiszewski
correlation for geothermal wells. These methods were recommended in literature to give the
good pressure estimation in vertical upward flow for two-phase oil and geothermal well (Brill
and Mukherjee, 1999) and (Uphadhay and Hartz, 1977) respectively.
The Duns and Ros correlation used in PipeSim performs well and gives the results without
discontinuities. The Orkiszewski method used in HOLA appeared to have a convergence
problem in computing algorithm which results with discontinuities at the flow pattern
transitions from bubble flow to slug flow. A sudden peak observed on the plots made for
geothermal wells may be considered as the effect of these discontinuities. Some authors

7. Discussion __________________________________________________________________________
158
suggest that coefficients in equations (B.41) and (B.45) may be modified so that the slopes of
the curves are retained but discontinuities are eliminated. This solves the convergence
problem but also may affect the accuracy of results (Brill and Mukherjee, 1999).
7.2 Acoustic velocity profile
As shown in Chapter 5 the density, compressibility and acoustic velocity are the fluid
properties closely related with each other. As the properties changes across the wellbore with
respect to the pressure and temperature changes it should be expected that acoustic velocity
will be different from point to point in vertical well. The computed profile of acoustic
velocity across the wellbores depth confirms this statement.
In order to predict the sonic velocity calculations was made using formula developed by
Gudmundsson and Dong (1993) and Wood’s (1944) for oil and geothermal two-phase wells
respectively. Both formulas assume the homogeneity of the mixture and were reported to
give a good estimation with measurements. The acoustic velocity in steam-water system is
more complicated due to temperature effects and mass transfer between the phases. This
brings theoretical limitations towards the Wood’s formula, however experiments of Semenov
and Costern (1964) showed velocity in steam-water mixture agreeing with those estimated
from Wood’s, and other sound speed models have also many limitations. Gudmundsson and
Dong presented their method to be in very good agreement with measurements for gas-oil
two-phase mixture (Gudmundsson and Dong, 1993).
Speed of sound varies significantly across the two-phase length of the wellbore. In
simulations these disparities are from 100 (m/s) at the wellhead to 1150 (m/s) at the bottom
for oil wells, and likewise from 120 (m/s) to 1350 (m/s) for simulated geothermal wells.
These differences are mainly due to different densities of oil, natural gas, water and steam.
Also the fact that pressures are in different range for each of the wells is important as
analysing the estimated acoustic velocities.
7. Discussion __________________________________________________________________________
159
There are more discrepancies between acoustic velocity profiles estimated for oil and
geothermal wells. The plots for oil wells show that there is not significant drop in sonic
velocity as the crude enters the two-phase region. For geothermal wells these decrease in
sound speed is less monotonically from pure water to the points of increasing void fraction of
steam at lower pressure. Moreover in the case of well F1 and F2 where pressure at the
wellhead is of relative lower value compared to other simulated wells, acoustic velocity
decrease despite the pressure increase downwards the wellbore.
In order to explain this behaviour this was plotted on the picture were the acoustic velocity
estimated for varying pressures across the well profile was placed versus void fraction. These
plots made for gas-oil and for geothermal wells compared each other reveal different
behaviour at high void fraction values. For hydrocarbons two-phase mixture the acoustic
velocity curves have less slope which becomes more flat as the pressure is higher. For steam-
water mixture this shape is getting to be more inclined towards vertical. This more steep
shape affects the sonic velocity. In the high void fraction region in the well, where steam
occupies the main volume of the pipe, changes of void fraction value affect more acoustic
velocity that pressure changes. This makes that acoustic velocity is decreasing downwards
the well profile despite pressure increase. This effect is presented by the path on the
mentioned plots. The acoustic velocity decreases until reach the region of the lower values of
the void fraction, where the curves on the plot are more flattened. It is α = 0.751 for well F1,
and α = 0.749 for F2.
7.3 Line packing
Line packing gives the information about pressure pulse propagation in the well. In order to
estimate the line packing, frictional pressure drop across the wellbore needs to be calculated.
The sum of the frictional pressure drop versus time gives the effect of line packing after valve
closure. PipeSim gives the values of pressure drop for the every 50m distance in the case of
oil wells. For geothermal wells this was calculated with 10m step, from Darcy-Weisbach
equitation. It is obvious that this model will not give reasonable results over all flow patterns
but if the actual flow is nearly homogenous, which is the case at high volume flowrates, then

7. Discussion __________________________________________________________________________
160
predictions may be considered reasonable. Cornish (1976) applied the homogenous model to
10 different vertical oil wells and found that the percentage difference between calculated and
measured total frictional pressure drop was on average around 2%.
The time o the plots is the time it takes for pressure wave to travel from the wellhead to the
point in question and back again i.e. up and down. This pressure wave travels at the speed of
sound which is significantly lower in two phase region where also depends on void fraction.
It makes the line packing unlinearized in the two phase region. These none linearly behaviour
of line packing is clearer for low void fractions because of higher changes in sonic velocity (I
refer again to the pots of calculated sonic velocities for varying pressure across the well
depth).
The frictional pressure drop is significantly higher for two-phase flow and increase as more
gas phase arises. The plots also reveal the dependence the frictional pressure drop on
diameter size. Diameter reduction causes the increase of frictional pressure drop. Both above
effect may be observed on the plots with estimated line packing. For oil wells there is no
tubing change thus only bubble point response affect calculated line packing. For geothermal
wells two stage tubing was assumed in calculations and in this case response on both effect is
visible. These effects are most distinguishable on the plots performed for well F1. The
different line inclination may be observed. The first indicates the diameter change from 13⅜
to 9⅝” and the second is the response of bubble point. These effects are obviously visible on
the all plots made in this work, but as calculations revealed bubble point in simulated
geothermal wells tends to appear near the diameter change, and thus both effects overlap each
other what makes them less distinguishable. The time differential of the pressure dp/dt placed
together with line packing on the plots allows observing this effect.
The transitions observed on the line pacing may be important for flow condition analysis in
geothermal wells, to estimate the depth at which scale precipitation would commence for
various wellbore diameters and mass flowrates. This can assist the engineer in the selection
of operating conditions that will tend to cause scaling at shallower depth, thus required easer

7. Discussion __________________________________________________________________________
161
clean-up operations (Ragnarsson, 2000). In the case of oil wells flow condition analysis may
be used in order to optimize gas lift operations (Gudmundsson at al, 2001).
7.4 Size of the pressure pulse
Closure of a valve will create a pressure pulse. The water-hammer theory estimate the
magnitude of the pressure pulse as: the product of the sonic velocity, the density, and flow
velocity. In producing gas-liquid wells the pressure increase with depth and hence the
mixture density and speed of sound also will increase. The hypothetical valve placed at an
increasing up-stream distance will experience an increasing water-hammer.
Theoretical water-hammer at the wellhead was examined from the calculations. The results
are placed in the tables. The acceleration pressure (water-hammer) values calculated for oil-
gas two-phase wells are in range from 1.9 to 5.2 (bar) depending on the wellhead conditions.
For geothermal well these values are significantly lower and are in range of 0.6 to 0.9 (bar),
This is mainly due to wide tubing diameter that effect in decrease of fluid velocity which
directly influence water-hammer.

Chapter 8
Conclusions

8. Conclusions __________________________________________________________________________
163
1. Water-hammer and line packing were estimated for oil and geothermal wells from
calculations performed in present work. PipeSim 2001 and HOLA 3.1 multiphase flow
simulators were used to predict two phase flow in the oil and geothermal wellbores
respectively. The simulations in present work incorporate correlations developed by Duns
and Ros for oil wells and Orkiszewski for geothermal wells, coupled with equations for phase
behaviour and wellbore heat-loss. Both models assume the changes in flow regimes and
slippage between the phases.
2. The results confirmed the possibility to adapt the information contained in the rapid
pressure transients when valve is activated to determine the mixture mass flowrate, density,
velocity and gas void fraction. Additional calculations allow converting this data to the
volume flowrates of each phase. Pressure Pulse Technology may be also used for flow
condition analysis as the effect of bubble point and diameter change affect the line packing
and are readily distinguishable in both oil and geothermal cases.
3. Pressure pulse propagation is closely related to sound velocity. Speed of sound varies
significantly across the two-phase length of the wellbore. Calculations showed that velocities
are from 100 (m/s) at the wellhead to 1150 (m/s) at the bottom for oil wells, and likewise
from 120 (m/s) to 1350 (m/s) for simulated geothermal wells. These differences are mainly
due to different densities of oil, natural gas, water and steam.
Performed calculations revealed that there is not significant drop in sonic velocity as the
crude enters the two-phase region in oil wells. For geothermal wells these decrease in sound
speed is less monotonically from pure water to the points of increasing void fraction of steam
at lower pressure.
Moreover in the case of well F1 and F2 where pressure at the wellhead is of relative lower
value compared to other simulated wells, acoustic velocity decrease despite the pressure
increase downwards the wellbore. This effect is presented on the plots. Acoustic velocity
decreases until reach the region of the lower values of the void fraction, where the curves in
the plots are more flattened. It is α = 0.751 for well F1, and α = 0.749 for F2.

8. Conclusions __________________________________________________________________________
164
4. The geothermal wells studied in present work are characterized by large tubing diameters.
Typical values assumed in present work are 13 ⅜”, 9 ⅝” of producing casing, what may be
considered as very unusual compared to 6.184”, 5.125” and 4.5” taken for oil wells. This
wide diameters result with low velocities of the flowing fluid. The water-hammer theory
estimate the size of the pressure pulse as: the product of the sonic velocity, the density, and
flow velocity. This acceleration pressure (water-hammer) values calculated for oil-gas two-
phase wells are in range from 1.9 to 5.2 (bar) depending on the wellhead conditions. For
geothermal well due to large tubing size these values are significantly lower and are in range
of 0.6 to 0.9 (bar). This fact may affect the accuracy of the measurements, as the water-
hammer and line packing shape may be less distinguishable from usual pressure fluctuations
at the well head.

165
References

9. References __________________________________________________________________________
166
Agar J., Farchy D., – “Wet Gas Metering Using Dissimilar Flow Sensors: Theory and Field
Trial Results”, Agar Corporation, SPE Annual Technical Conference and Exhibition held in
San Antonio, Texas, 29 September-2 October 2002. SPE – 77349
Aggour M.A. Al-Yousef H.Y., Al-Muralkhi A.J. –”Vertical Multiphase Flow Correlations for
High Production Rates and Large Tubulars”, SPE Production and Facilities, New Orleans,
1996, SPE – 28465
Al-Taweel A.B, Barlow S.G – “Field Testing of Multiphase Meters”, SPE Annual Technical
Conference and Exhibition, Houston, 1999. SPE – 56583
Ansari A.M., Sylvester N.D., Brill J.P. - “Supplement to SPE 20630, A Comprehensive
Mechanistic Model for Upward Two-Phase Flow in Wellbores”- Pakistan Petroleum Ltd,
SPE Journal,1994. SPE - 28671
Bjornnson G. –“Multi-Feedzone Geothermal Wellbore Simulator”, Lawrence Berkley, report
LBL -23546, USA, 1987
Brill and Mukherjee J.P., Mukherjee H. – “Multiphase Flow in Wellbores”, SPE Monograph,
1999
Busaidi K., Bhaskaran H., – “New Development in Water Cut Meter with Salinity
Compensation”Petroleum Development Oman (PDO), Oman, J. Chen, Haimo Technologies,
China, 2002. SPE – 77894
Campbell – “Gas Conditioning and Processing” Vol.1 The basic Principles, Campbell
Petroleum Series, USA, 1994
Cornish R. E. – “The Vertical Multiphase Flow of Oil and Gas at High Rates” Abu Dhabi
Petroleum Co. Ltd., SPE Journal, 1976. SPE – 5791

9. References __________________________________________________________________________
167
Dickson M.H., Fanelli M. – “What is Geothermal energy?”. Istituto di Geoscienze e
Georisorse , Pisa, Italy, 2001.
Dowty E. L., Hatton G. L., Durrett M.G., Dean T.L., – “The Genesis of a Three-Phase
Subsea Metering System” Texaco Inc., 1991 SPE – 22983
Eliasson E. T. – “Power generation from High-Enthalpy Geothermal Resources”, National
Energy Authority-GHC Bulletin, Iceland 2001
Falcone G, Hewitt, G. F. Alimonti C. – “Multiphase Flow Metering: Current Trends and
Future Developmnets”, SPE Annual Technical Conference and Exhibition held in New
Orleans, 2002. SPE – 74689
Falk K. Bergant A. Dudlik I. – “Pressure Surges in Multiphase Media” Norwegian Institute
of Science and Technology, Trondheim, 1999
Firoozabadi A. – “Thermodynamics of Hydrocarbon Reservoirs”, The McGraw-Hill
Companies Inc. ISBN 0-07-022071-9, USA, 1999
Firoozabadi A. and Pan H. – “Two-Phase Isentropic Compressibility and Two-Phase Sonic
Velocity for Multicomponent Hydrocarbon Mixtures” Annual Technical Conference and
Exhibition, San Antonio, Texas, 2000 – SPE 65403
Glasø O. – “Generalized Pressure Volume-Temperature Correlations”, SINTEF/NTH,
Trondheim, 1980. SPE - 8018
Gomez L. E., Shoham O., Schmidt Z., Northug T. –”A Unified Mechanistic Model for
Steady-State Two-Phase Flow in Wellbores and Pipelines”, SPE Annual Technical
Conference and Exhibition held in Houston, Texas, 1999. SPE – 56520

9. References __________________________________________________________________________
168
Gould T.L., Tek M.R. –”Steady and unsteady State Two-Phase Flow Trough Vertical Flow
Strings”, American Institute of Mining, Metallurgical, and Petroleum Engineers, 1970. SPE –
2084
Grant M. A. and Sorey M. – “The Compressibility and Hydraulic Diffusivity of a Water-
Steam Flow”, Department of Scientific and Industrial Research, Vol. 15 No. 3, US, 1979
Grant M.A., Donaldson I.G., Bexley P.F. –“Geothermal Reservoir Engineering”, Academic
Press Inc., London, 1982
Gudmundsson J. S. – “Two-Phase Wells”, Petroleum Engineering Department, Stanford
University, California, 1986.
Gudmundsson J.S., “Notes about wells on Reykianes and Svartsengi fields”, private
communication, 2003.
Gudmundsson J. S., Horne R. N., A. J. Menzies – “Streamtube Relative-Permeability
Functions for Flashing Steam/Water Flow in Fractures”, SPE Reservoir Engineering, 1986.
Gudmundsson J. S., Thrainsson H. – “Power Potential of Two Phases Geothermal Wells”,
Geothermal Division, National Energy Authority, Reykjavik, 1988.
Gudmundsson J.S, Ambastha A.K. –“Geothermal Two-Phase Wellbore Flow”, Petroleum
Engineering Department, Stanford University, California, 1986.
Gudmundsson J.S. and Dong L. “Model for Sound Speed in Multiphase Mixtures” –
Department of Petroleum Engineering and Applied Geophysics, 3rd Lerkendel Petroleum
Engineering Workshop, Trondheim, 1993.
Gudmundsson J.S., Ambastha A.K. –“Pressure Profiles in Two Phase Geothermal Wells:
Comparison of Field Data and Model Calculations”, Petroleum Engineering Department,

9. References __________________________________________________________________________
169
Stanford University, 1986
Gudmundsson, J.S., Brock, D.C. – “Reservoir Compressibility from Water Influx Modelling
of Liquid Dominated Systems”, Petroleum Engineering Department, Stanford University,
California, 1989
Gudmundsson J.S., Celius H.K. – “Gas-Liquid Metering Using Pressure-Pulse Technology”
SPE Annual Technology Conference and Exhibition, Housto, Texas, 1999. SPE – 56584.
Gudmundsson J.S., Durgut I., Rønnevig J., Korsan K, Celius H.K., – “Pressure Pulse
Analysis of Gas Lift Wells”, ASME/API Gas Lift Workshop, Aberdeen, 2002
Gudmundsson J.S., Falk. K, – „Multiphase Pressure Pulses for Quick-Acting Valves:
Offshore Testing”, SPE, Department of Petroleum Engineering and Applied Geophysics,
NTNU, 1999. SPE – 56526.
Gudmundsson J.S., Oritz R. –”Two-Phase Flow and Calcite Deposition” –SPE – AIME,
California, 1984. SPE – 12741
Gudmundsson J.S., Sveinson S., Jonsson V. “Compressibility And Sonic Velocity in
Steam/Water Mixtures” –13th workshop Geothermal Reservoir Engineering, Stanford
California, 1988
Hansen B. V. – “Operational Experience with Subsea Multiphase Flow Meters”, Framo
Engineering A.S, Multiphase Metering Conference, Aberdeen, 1997.
Henry J. Ramey Jr., William E. Brigham H., Chen K., Atkinson D. - “Thermodynamics and
hydrodynamic Properties of Hydrothermal Systems”, Stanford University, California, 1977
HOLA 3.1 Program Manual, Earth Science Division, Lawrence Berkley University of
California, USA, 1993

9. References __________________________________________________________________________
170
Horne R.N. –“Modern Well Test Analysis – A Computer Aided Approach”, Stanford
University, Petroway Inc., USA, 1990.
Jamieson A.W. – “High Performance Multiphase Metering”, Shell U.K., Exploration and
Norflow Seminar, http://www.iceweb.com, 1999
Jonsson G. – “Simulations of line packing in an oil well”, Department of Petroleum
Engineering and Applied Geophysics, Trondheim, 1995.
Khokhar A.A. – “Pressure Surge At High Velocity Wellbore Flow Dynamics”, The
Norwegian Institute of Technology, Department of Petroleum Engineering and Applied
Geophysics, Trondheim, 1994
Kiefer S.W. – “Sound Speed in Liquid-Gas Mixtures: Water-Air and Water-Steam”, Journal
of Geophysical Research, Vol. 82, No. 20, 1977
King N.W. –”The Basis of the Multiphase-Flow”, National Engineering Laboratory, Glasgow,
1990.
King. N.W, – “Multiphase Flow in Pipeline System – Its Transfer Measurement and
Handling”, National Engineering Laboratory, East Kilbride, Glasgow, 1999
Manabe et al. R.,Zhang H.-Q., Brill and MukherjeeJ.P. –”Crude Oil-Natural Gas Two Phase
Flow Pattern Transition Boundaries at High Pressure Conditions”, SPE Annual Technical
Conference and
McNeil D. A. – “Pipeline Design for Two - Phase Flow”, National Engineering Laboratory,
East Killbride, Glasgow, 1990.
McWilliam D. and Duggins R. K. – “Speed of Sound in Bubbly Liquids”, Department of
Mechanical Engineering, University of Nottingham, Vol. 184, Pt 3C, UK, 1969

9. References __________________________________________________________________________
171
Michaelides E.E., - “Thermodynamics Properties of Geothermal Fluids”, Department of
Mechanical and Aerospace Engineering, University of Delaware, Newark, 1981.
Millington B.– “Multiphase Flow Metering: A Review”, National Engineering Laboratory,
Oilfield Product Ltd. UK, 1999.
Nakaryakow V.E., Pokusayev B.G., Shreiber I.R. – “Wave propagation in Gas Liquid
Media”, second edn. CRC Press Inc., Florida, 1993
Orkiszewski J. –”Predicting Two-Phase Pressure Drops in Vertical Pipe”, Esso Production
Research Co. Houston, 1967. SPE- 1546
Prats M. - “The Effect of Heat Transfer Between Nearby Layers on the Volume of the Steam
Zones”, Michael Prats and Assocs. Inc., SPE Journal, 2001. SPE – 71869
PipeSim 2000-Manual, Baker Jardine & Associates – Petroleum Engineering and Software,
London, 2000.
Ragnarsson A. – “Geothermal Development in Iceland 1995 - 1999”, Orkustofnun, Iceland,
2000
Roach G. J., Whitaker T. S. – “Long Term Use of A Multi Phase Flow Meter”, Kwarner
Oilfield Product Ltd. UK, 1999.
Semenov N.I., Kostern S.I., -”Results of Studies the Speed of Sound in moving gas-liquid
systems”, Teploenergetica, Thermal Engineering Journal 11(6), 1964
Stetfjeding E., Gudmundsson J. S., - “Friction factor in high pressure natural gas pipelines
from measurements”, Department of Petroleum Engineering and Applied Geophysics,
Norwegian University if Science and Technology, Trondeim, 1998.

9. References __________________________________________________________________________
172
Steward D. – “Multiphase Metering Today”, Offshore Engineer Journal, January 14, 2003
Stokes E.G., Mitchell M. H., Perry D.T., Halvorsen M., – “Application of The First
Multiphase Flowmeter in the Gulf of Mexico”, Conoco Inc., PetroTraces, Fluenta a.s., New
Orleans, Louisiana 1998, SPE – 49118
Theuveny B.C, Segueral G., Pinquet B., – “Multiphase Flow Meters in Well Testing
Aplications”, Schlumberger Oilfield Services, SPE Annual Technical Conference and
Exhibition held in Louisiana, 2001. SPE – 71475
Toral H., Cai S., Akartuna E., Stothard K.– ”Neural Nets in Multiphase flow metering”, PSL,
Multiphase Metering Conference, Aberdeen 1999.
Trusler J.P.M. – “Physical Acoustic and Metrology of Fluids”, Adam Hilger, 1991
Uphady R.N., Hartz J.D. Tomkoria B.N. –”Comparison of Calculated and Observed Pressure
Drops in Geothermal Wells Producing Steam-Water Mixtures” SPE-AIME, Union of Oil
Company, California 1977. SPE - 6766
Uphady R.N., Hartz J.D. Tomkoria B.N. –”Comparison of Calculated and Observed Pressure
Drops in Geothermal Wells Producing Steam-Water Mixtures” SPE-AIME, Union of Oil
Company, California 1977. SPE – 6766
Warren P.B., Hussain S., Ghamdi S., – “Background and Operational Experience of
Multiphase Metering in the Safaniya Field-Offshore Saudi Arabia”, Saudi Aramco, 2001,
SPE – 71534
Watters G.Z. – “Analysis and Control of Unsteady Flow in Pipelines”, Butterworth
Publishers, ISBN-0-250-40 492-3, California, 1978
William and McCain D. McCain, Jr., – “Analysis of Black Oil PVT Reports Revisited”- SPE

9. References __________________________________________________________________________
173
Annual Technical Conference and Exhibition held in San Antonio, 2002. SPE – 69071
Williams J. – “Status of Multiphase Flow Measurements Research”, Oryx Energy Co., SPE
Annual Technical Conference and Exhibition held in New Orleans, 1994. SPE – 28515
Wood A.B. – “A Textbook of Sound”, Bell and Sons Ltd, London, 1944
Wylie E. B., Streeter V. L. – „Fluid Transients in Systems”, Prentice Hall, New Jersey, 1993.
Zabaras G. J. - “Prediction of Slug Frequency for Gas/Liquid Flows”, Shell E&P Technology
Co., SPE Annual Technical Conference and Exhibition held in Houston, 1999. SPE - 65093

Appendix A
Multiphase Metering Projects

Appendix A – Multiphase Metering Projects __________________________________________________________________________
175
Following text contains a brief description of some MFMs projects that are now
commercially available. The tables given below the text A.1, A.2, A.3, A.4, contain
comparison of the methods with regard to the techniques that are used for measurement
purposes.
Roxar AS MFI
Several elements are combined to measure the phase flow rates. The phase fraction sensor is
mounted vertically with microwave transmitters and receivers protruding a few millimetres
into the flow passage. In the fraction sensor, a resonant cavity is contained between two sets
of microwave absorbers. Measurements of the frequency in the cavity are claimed to be
proportional to water cut in the liquid phase. A single-energy gamma densitometer is used to
measure the total mixture density. The gas fraction and the water cut are derived from this
measurement. The mixture velocity is gained from cross-correlation between two microwave
sensors located a known axial distance apart. (Stokes et al., 1998)
Roxar AS Fluenta
This meter uses several different sensors in combination. Capacitance and inductance sensors
are used to measure bulk electrical properties of the flowing mixture in oil and water
continuous flows respectively, with the water cut derived from these measurements. A single
energy gamma densitometer measures the average mixture density by attenuation of gamma
photons. The phase fractions can then be extracted from this information, as described earlier.
Velocity measurement is by cross-correlation of capacitance signals for oil continuous flow,
and by differential pressure across a venturi when the flow is water continuous. Velocity and
phase fraction measurements are then combined to give phase flow rate information. (Warren,
et al., 2001)

Appendix A – Multiphase Metering Projects __________________________________________________________________________
176
Kvearner-DUET
This flowmeter uses the attenuation of gamma rays at two different energies to derive the oil,
water and gas phase fractions. The mass absorption coefficients of oil and water vary as a
function of gamma photon energy and so the two different absorption rates and continuity
relationship allow the phase fractions to be determined. To maximise the transmission of the
lower energy gamma rays the sources and detectors are arranged around a GRP pipe section.
Velocity measurement is by cross-correlation of two gamma densitometer signals, so it
responds most accurately to distinct multiphase flow features like liquid slugs. (Roach,
Whitaker, 1999)
Schlumberger-Framo
A mixer, which it is claimed gives both spatial and temporal mixing, is utilised to pre-
condition the flow entering a venturi. The mixer consists of a large plenum chamber and
piccolo tube. The piccolo tube penetrates the base of the plenum chamber and conducts the
flow to the venturi, the aim being to draw the gas and liquid into the venturi at equal velocity.
The differential pressure across the venturi is proportional to the total volume flow rate. A
dual-energy gamma densitometer is mounted at the throat of the venturi and is used to derive
phase fractions. (Hansen, 1997)
Jiskoot Mixmeter
The Mixmeter makes use of two separate radioactive sources to measure both the phase
fractions of the multi phase mixture and the mixture velocity. An integral part of the
flowmeter is a static mixer which conditions the mixture (spatially) so that an even
distribution of the phases is maintained at the measurement cross-section. The phase fractions
are determined by taking radiation attenuation measurements over a spectrum of energies.
Passage of the gamma rays through the pipe is facilitated by the use of low absorption
windows. Determination of the mixture velocity is by cross-correlation of photo detector
signals received from two sources of equal energy, but mounted a known axial distance apart.

Appendix A – Multiphase Metering Projects __________________________________________________________________________
177
Differential pressure measurement across the static mixer is also used as secondary measure
of flow velocity. (Dowty et al., 1991)
FlowSys
The FlowSys multiphase flowmeter uses two arrays of vertically mounted capacitance
sensors, in what is effectively a very sophisticated liquid level sensing system. Two thin
parallel plates are mounted axially in the flow passage, at a known distance apart. An array of
capacitance sensors is mounted on the surface of each plate. The capacitance of the flow is
thus measured at several vertical intervals in the flow passage. The gas/liquid interface is
determined and the gas fraction calculated. The average water cut of the liquid is derived
from the capacitance between the lower sensor pairs below the gas/liquid interface. The meter
only operates in the slug flow regime, as this is a requirement for effective cross-correlation
between the two sets of capacitance sensors. A slip correlation is then used to estimate the
bulk gas and liquid velocities. The current version for oil continuous flow is being up-dated
for operation in water continuous flows. (Al-Taweel, Barlow, 1999)
Agar
The flowmeter contains a rotary positive displacement flowmeter, modified for multiphase
use, and two Venturis in series in a vertically upward flow. An algorithm in the control
computer derives the gas and liquid volume flow rates from these outputs. The water content
of the flow is derived from the power absorbed by the process fluid from an in-line
microwave monitor, and the continuous liquid phase is detected by the phase shift between
the transmitter and two differentially spaced aerials. The measurement of the liquid phase
water cut can then be derived from the gas fraction and the microwave monitor output.
Individual oil, water and gas flow rates are then computed from these parameters. (Agar, and
Farchy, 2002)

Appendix A – Multiphase Metering Projects __________________________________________________________________________
178
ISA Scrollflow
Essentially this is a positive displacement flowmeter. It has two counter-rotating shafts which
are machined to form a continuous and constant volume cavity, and the rotation created to the
shafts by the fluid passing through the meter is claimed to be proportional to the total volume
flow rate. A single-energy gamma densitometer located at the centre of the meter measures
the overall mixture density. If the water cut of the liquid phase is known, then the phase flow
rates can be determined from these measurements. At present the meter design does not
include an integral water monitor to determine liquid water fraction. (Millington, 1999)
Haimo
The Haimo multiphase flowmeter, developed and used in China, uses an electromagnetic
valve to periodically switch flow through a bypass trap where liquid collects. The velocity of
this liquid passing through the meter is measured by cross-correlation between two single-
energy gamma densitometers. The gas velocity is derived using a slip relationship. (Busaidi
et al., 2002)
Esmer
The Esmer multiphase flowmeter, currently under development, uses a neural network
approach to interpret signals from capacitance/conductance sensors and pressure transmitters,
combining measurements from 'training' of the meter to predict the expected values of phase
velocities. (Toral, at al., 1999)
Tables below contain comparison of the methods with regard to the techniques that are used
for measurement purposes.

Appendix A – Multiphase Metering Projects __________________________________________________________________________
179
Table A.1 – Methods utilizing Flow Conditioning
Flow Conditioning
Homogenisation Leave-as-it-is In-line separation
Jiskoot-Mixmeter
Schlumberger-
Framo
TEA-Lyra
ISA- Scrollflow
ISA-Solarton
Schlumberger-VX
Roxar AS Fluenta
Roxar AS-MFI
Kvearner-DUET
Megra (for GVF < 25%)
Esmer
Yokogawa
Agar
WellCamp
Accuflow
Kvearner-CCM
Megra (for GVF > 25%)
Haimo
Jiskoot-Starcut

Appendix A – Multiphase Metering Projects __________________________________________________________________________
180
Table A.2 – Methods utilizing a Gamma Source
Gamma Source
Used Not Used
Roxar AS Fluenta
Schlumberger-Framo
Schlumberger-VX
TEA-Lyra
ISA- Scrollflow
Kvearner-DUET
Megra
Jiscoot-Mixmeter
Agar
Esmer
WellComp
Jiskoot-Starcut
Kvearner-CCM
TEA-Vega
ISA-Solarton
TEA-Lyra (for WC < 25%)
FowSys
Yokogawa

Appendix A – Multiphase Metering Projects __________________________________________________________________________
181
Table A.3 Methods utilizing Intrusive methods
Intrusive
Yes No(*)
Jiscoot-Mixmeter
Agar
Schlumberger-Framo
Accuflow
WellComp
Kvearner-CCM
ISA- Scrollflow
ISA-Solarton
TEA-Vega
Jiskoot-Starcut
Haimo
(*)Venturi’s are not regarded as intrusive devices
Schlumberger-VX
Roxarn AS-Fluenta
ROxar AS-MFI
Kvearner-DUET
Esmer
Megra
TEA-Lyra
FlowSys
Yokogawa

Appendix A – Multiphase Metering Projects __________________________________________________________________________
182
Table A.4 Methods utilizing Cross Correlation
Cross Correlation
Yes None
Roxar AS-MFI
Kvearner-DUET
Roxar AS-Fluenta
FlowSys
Yokogawa
Haimo
Jiskoot-Mixmeter
Agar
Accuflow
WellComp
Jiskoot-Starcut
Kvearner-CCM
ISA-Scrollflow
ISA-Solarton
Esmer
Megra
Schlumberger-VX
TEA-Lyra
Schlumberger-Framo
TEA-Vega

Appendix B
Duns and Ros, Orkiszewski - Multiphase Flow Correlations

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
184
B.1 Duns and Ross correlation
Flow-Pattern Prediction
Figure B.1 shows the flow-pattern map developed by Duns and Ros. They identified four
separate regions for computation purposes, Regions I through III and a transition region.
Duns and Ros also identified the heading region as a fifth region, but this is now considered
part of Region II. In this work I will refer to Regions I through III as bubble, slug, and mist
flow, respectively.
Figure B.1 Duns and Ros – Flow Patterns Map
The flow-pattern transition boundaries are defined as functions of the dimensionless gas and
liquid velocity numbers NGu and NLu. For these transition boundaries, Duns and Ros
proposed these equations.
Bubble/slug boundary:
uNLLuN LSBG ⋅+= 21/ (B.1)

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
185
where L1 and L2 are functions of Nd – dimensionless diameter number. The gas and liquid
velocity numbers are given as:
4
L
LLL g
uuNσρ⋅
⋅= (B.2)
and
4
G
GGG g
uuNσρ⋅
⋅= (B.3)
Where u is the superficial velocity, g – gravity acceleration, and ρ density of the gas and
liquid indicated with subscripts.
Slug/transition boundary
uNuN LTrSG ⋅+= 3650/ (B.4)
Transition/mist boundary
75,0
/ 8475 uNuN LMTrG ⋅+= (B.5)
Liquid holdup prediction: Duns and Ros chose to develop empirical correlations for a
dimensionless slip-velocity number - NKu, rather than for liquid holdup. NKu is defined in
similar way to the gas and liquid velocity numbers.
4
L
LKK g
uuNσρ⋅
⋅= (B.6)
The slip velocity was defined as
L
LK
L
GKLGK H
uH
uuuu −
−=−=
1 (B.7)

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
186
where HL is the liquid holdup.
Pressure gradient contains three components: gravitational, frictional, and accelerational.
accK
f dzdpg
dzdp
dzdp
⎟⎠⎞
⎜⎝⎛+⋅+⎟
⎠⎞
⎜⎝⎛= ρ (B.8)
In order to calculate the gravitational pressure gradient following procedure was proposed
- Calculate the dimensionless slip velocity NKu, using the appropriate correlation.
The correlations for NKu are different for each flow pattern and are given later.
- Solve the equations given above for slip velocity.
- Calculate the liquid holdup from equation given above.
- Calculate the slip density from equation (B.9)
( )LGLLK HH −⋅−⋅= 1ρρρ (B.9)
- Calculate the elevation component of the pressure gradient as given in equation (B.8)
Flow pattern identification:
- Bubble flow exists if
SBGG uNuN /< (B.10)
For Bubble flow, the dimensionless slip-velocity number is given by
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⋅+⋅+=uN
uNFuNFFuN
L
GLK 1
'321 (B.11)

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
187
where F1 and F2 are function of the liquid velocity number NL. F3’ can be obtained from
dNF
FF 433 ' ⋅= (B.12)
where F4 and Fd are also the functions of NL.
The friction pressure-gradient component for bubble flow is given by
duuf
dzdp MLL
f ⋅⋅⋅⋅
=⎟⎠⎞
⎜⎝⎛
2ρ (B.13)
From experimental data Duns and Ros developed the equation for friction factor:
3
21 f
fff ⋅= (B.14)
The friction factor is governed mainly by f1, which is obtained from a Moody diagram Fig.
(B.2) as function of Reynolds number for the liquid phase.
L
LL duµ
ρ ⋅⋅=Re (B.15)
The factor f2, is a correction for the in-situ gas/liquid ratio. The factor f3 is considered by
Duns and Ros as second-order correction factor for both liquid viscosity and in-situ gas/liquid
ratio. It becomes important for kinematics viscosities greater than approximately 50 cSt
(0,744 Pa·s) and is given by
L
G
uuf
f⋅
⋅+=504
1 13 (B.16)
Duns and Ros considered the acceleration component of the pressure gradient to be neglected
for bubble flow.

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
188
- Slug flow exist if
TrSGGSBG uNuNuN // << (B.17)
For slug flow the dimensionless slip-velocity umber is
( ) ( )uNFFuN
FuNL
GK ⋅+
+⋅−=
7
6982,0
5 1'
1 (B.18)
where F5, F6 and F7 are function of the liquid viscosity number NµL, and
66 029,0' FNF d +⋅= (B.19)
Figure B.2 Moody diagram

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
189
The friction pressure gradient component for slug flow is calculated exactly the same way as
the bubble flow. Also, the accelerational component slug flow is considered negligible.
Mist flow exist if
MTrGG uNuN /> (B.20)
Duns and Ros assumed that, at high flow rates, the liquid is transported mainly as small
droplets. The result is nearly a no slip condition between the phases. Thus NKu = 0 and uK = 0
and HL = (1-α). The mixture density for use in elevation component of the pressure gradient
then is calculated from
( ) LGM ραραρ ⋅−+⋅= 1 (B.21)
Friction in the mist flow pattern originates from the shear stress between the gas and the pipe
wall. Thus, the friction component of the pressure gradient is determined from
duf
dzdp GG
f ⋅⋅⋅
=⎟⎠⎞
⎜⎝⎛
2
2ρ (B.22)
Because there is no slip, the friction faction is obtained from a Moody diagram Figure (B.2)
as a function of a Reynolds number for gas phase
G
GS duµ
ρ ⋅⋅=Re (B.23)
Duns and Ros noted that the wall roughness for the mist flow is the thickness of the liquid
film that covers the pipe wall. Waves on the film cause an increased shear stress between the
gas and the film that, in turn, can cause the greatest part of the pressure gradient. These
waves result from the drag of the gas deforming the film in opposition to the surface tension.
This process is affected by viscosity and also is governed by a form of the Weber number

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
190
L
GGWe
uN
σερ ⋅⋅
=2
(B.24)
This influence was accounted for by making a new function of dimensionless number
containing liquid viscosity.
εσρµ
µ ⋅⋅=
LL
LN2
(B.25)
The value of roughness may be very small, but the relative roughness never becomes smaller
than the value of the pipe itself. At the transition to slug flow, the waviness may become
large, with the crests of opposite waves touching and forming liquid bridges. Then ε/d
approaches 0.5. Between these limits, ε/d can be obtained from equations
dudN
GG
LWe ⋅⋅
⋅=≤ 2
0749,0;005,0ρ
σε (B.26)
and
( ) 302,02
0371,0;005,0 µρσε NN
dudN We
GG
LWe ⋅⋅
⋅⋅⋅
=> (B.27)
where d is in [ft] unit, and uG is in [ft/s] ρG in pounds per cubic foot and σ in dynes per
centimetre. Values of f for the mist flow-pattern can be found for ε/d > 0,005 from
extrapolation of the Moody equation.
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟⎠⎞
⎜⎝⎛⋅+
⎟⎠⎞
⎜⎝⎛ ⋅⋅
⋅=73,1
067,027,0log4
14d
d
f εε
(B.28)
As the wave height of the film on the pipe wall increases, the actual area variable for gas
decreases because the diameter open to flow of gas in now d-ε. Duns and Ros suggested that

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
191
the friction component of the pressure gradient could e refined by replacing d with d-ε and uG
with uG · d2/( d-ε)2 throughout the calculations. This results a trial-and error procedure to
determine the ε. In mist flow, acceleration often can not be neglected as it was in bubble and
slug flow. The accelerational component of the pressure gradient cab be approximated by
⎟⎠⎞
⎜⎝⎛⋅⋅
=⎟⎠⎞
⎜⎝⎛
dzdp
puu
dzdp MGM
acc
ρ (B.29)
The derivation f this equation provided by Beggs and Brill and Mukherjeecan be found in
Brill and Makherjee monograph (1999).
- Transition region exists if
MTrGGTrSG uNuNuN // << (B.30)
If this region is predicted, Duns and Ross suggested linear interpolation between the flow-
pattern boundaries, to obtain the pressure gradient. This will require a calculation of pressure
gradient with both slug-flow and mist-flow correlations. The pressure gradient in the
transition region then is calculated from
( )mistslugf dz
dpAdzdpA
dzdp
⎟⎠⎞
⎜⎝⎛⋅−+⎟
⎠⎞
⎜⎝⎛⋅=⎟
⎠⎞
⎜⎝⎛ 1 (B.31)
Increased accuracy was claimed in the transition region if the gas density used in the mist-
flow pressure-gradient calculations was modified to be
MTrG
GGG uN
uN
/
' ⋅= ρρ (B.32)
where ρG is the gas density calculated at the given conditions of pressure and temperature.
This modification accounts for some of the liquid being entrained in the gas.

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
192
B.2 Orkiszewski correlation
- Bubble/slug transition:
BSB L=/α (B.33)
du
L MB
2
2218,0071,1 ⋅−= (B.34)
where uM is in [ft/s] and d in [ft]. LB is constrained algebraically to be ≥ 0.13.
- Bubble flow exist if
BL≤α (B.35)
The liquid holdup for bubble flow is determined from
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⋅−⎟⎟
⎠
⎞⎜⎜⎝
⎛+−+⋅−=
K
G
K
M
K
ML u
uuu
uu
H 411211
2
(B.36)
which is equivalent to equation for Duns and Ros correlation. Orkiszewski adopted the
Griffith suggestion that 0.8 [ft/s] is a good approximation of the average uK that is function of
the gas liquid densities and surface tensions (Brill, 1999). The liquid holdup determined from
above equation is then used to calculate slip density with equation (B.9) which in turn is used
to calculate the elevation component of pressure gradient.
The friction pressure-gradient component for bubble flow is given by
dHu
f
dzdp L
LL
f ⋅
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅
=⎟⎠⎞
⎜⎝⎛
2
2
ρ (B.37)

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
193
The friction factor is obtained from a Moody diagram Figure (B.4) as function of relative
roughness and Reynolds number for the liquid phase
L
L
LL
L
dHu
µ
ρ ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
=
2
Re (B.38)
The acceleration pressure-gradient component for bubble flow was considered negligible.
- Slug flow
Slug flow exist if inequalities are satisfied
SB /αα > (B.39)
and
TrSGG uNuN /< (B.40)
The slip density is calculated from
( )Γ⋅+
+⋅++⋅
=L
BM
GGBLLK uu
uuuρ
ρρρ (B.41)
Orkiszewski developed above equation (B.41) by performing mass and volume balances on a
typical slug unit consisting of a bubble and liquid slug. A similar Griffith and Wallis
development neglected the presence of a liquid film around the bubbles ad the possibility of
liquid droplets being entrained in the bubbles. Consequently Orkiszewski used the data of
Hagedorn and Brown and proposed the last term in equations (B.41), to account for the
distribution of liquid in this region. This modification was meant to extend the Griffith and
Wallis work to include the high-velocity flow range. Griffith and Wallis correlated the
bubble-rise velocity uB by the relationship
dgCCuB ⋅⋅⋅= 21 (B.42)

Appendix B – Duns and Ros, Orkiszewski – Multiphase Flow Correlations __________________________________________________________________________
194
where C1 and C2 are the functions of ReB and ReL. The precise procedure of uB calculations
including iteration process for higher Reynolds number may be found in Brill and
Mukherjeeand Makherjee monograph (1999).
L
BLB
duµ
ρ ⋅⋅=Re (B.43)
and
L
MLL
duµ
ρ ⋅⋅=Re (B.44)
The friction pressure-gradient is given by
Γ+⎟⎟⎠
⎞⎜⎜⎝
⎛++
⋅⋅⋅⋅⋅
=⎟⎠⎞
⎜⎝⎛
BM
BLML
f uuuu
dguf
dzdp
2
2ρ (B.45)
The friction factor f is calculated from the Moody diagram using the following definition of
Reynolds number
L
MLB
duµρ ⋅⋅⋅
=1444
Re (B.46)
Pressure drop due to acceleration is neglected in slug-flow pattern.
For transition and mist flow regime Orkiszewski uses the Begs and Brill methods that are
described above in previous section of the Appendix B.

Appendix C
Sound Wave Propagation Process in Steam Water Mixture

Appendix C – Sound Wave Propagation Process in Steam Water Mixture __________________________________________________________________________
196
The complex physical process that occurs during propagation of sound wave in water-vapor
two-phase system was described by (Kieffer, 1977).
Consider the temperature-entropy diagram of water shown above on Figure (5.7). A mixture
of saturated water and steam is represented as point G where the chord ratio FG/FH is the
mass fraction x of steam and the mixture. Isentropic pressure changes, such as the
compression and rarefaction which occurs during propagation of sound wave are presented
by movement up and down the constant entropy line CGK. If steam and water remain in
thermal equilibrium on the saturation line, there must be mass transfer between the phases,
since the fraction of steam in mixture changes (BC/BD ≠ FG/FH ≠ IK/IM). This requires that
condensation or evaporation take place. An isentropic pressure increase from p to p + ∆p
corresponds to movement of the mixture from G to C in the temperature-entropy diagram.
The pressure increase in the water phase corresponds to movement from F to A; as a result,
the water phase becomes subcooled. The pressure increase in the steam phase corresponds to
movement from H to E as the steam becomes superheated. The induced temperature
difference between the steam and the water leads to heat transfer from the superheat steam to
subcooled water. If the original composition of the mixture G lies to the right of the peak of
the two-phase loop as shown in (Figure 5.7), some water will be vaporized and the mass
fraction of steam in the mixture will increase during adiabatic compression (BC/BD >
FG/FH). If the original composition lies to the left of the top of the two-phase loop (assumed
to be symmetric), some steam will condense, and the mass fraction of steam in the mixture
will decrease during adiabatic compression. Thus by heat and mass transfer both water and
the steam are restored to the saturation line, the water by the path A to B, and the steam by the
path E to D. An isentropic pressure reduction from p to p - ∆p corresponds to the movement
from G to K in the temperature - entropy diagram. The pressure decrease in the water phase
corresponds to movement from F to R; as result, the water becomes superheated above its
saturation temperature point I (IR is a continuation of the pressure line from the water region).
The pressure decrease in the steam phase alone corresponds to movement from H to N on the
diagram, and the steam becomes subcooled or supersaturated with respect to its saturation
temperature, point M (MN is a continuation of a constant pressure line from the superheated
region). If the original composition of the mixture G lies on the right side of the two-phase

Appendix C – Sound Wave Propagation Process in Steam Water Mixture __________________________________________________________________________
197
loop, some vapor will condense to form a mixture of saturated water and steam (point L), and
thus the subcooled steam may move toward the stable state M. The mass fraction of steam in
such a mixture will decrease (IK/IM < FG/FH). If the original composition lies to the left of
the two-phase loop (assume to be symmetric), cavitation, and some vaporization of the
subcooled liquid will be dominant process and the mass transfer of steam in the mixture will
increase. Cavitation of the water creates a local mixture with the composition of point J and
the superheated water at point R thus moves towards the stable state I, a mixture of water and
steam.
Figure C.1 Temperature – entropy diagram for H2O

Appendix D
PipeSim 2000-Multiphase Flow Simulator

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
199
D.1 PipeSim Well Performance Analyses
PipeSim is the program developed by Baker Jardine & Associates, London. The program
allows predicting the relationship between flowrates, pressure drop, and piping geometry
(length, diameter, angle, etc.) for the fluids produced from reservoir. Individual PipeSim
modules are used for a wide range of analyses including: well monitoring, nodal analysis,
artificial lift optimalisation, pipeline and process facilities modelling, and field planning. A
major future of PipeSim 2000 is the system integration and openness that allows constructing
the total production model from reservoir to processing facilities. The model can be either
operated hooked up to the reservoir simulator, such like Eclipse, or with a simplified material
balance. The simulations can track multiphase issues such as slugging, fluid velocities, or
thermal performance and also be used to monitor topside equipment such as compressor
power requirements. Program allows deciding between the customary and SI units and
enables the different input and output units depending on which are more convenient for
calculations.
D.1.1. Fluid Properties Correlations
At the beginning the program requires the fluids properties to be specified. To predict
pressure and temperature changes from the reservoir along the wellbore (or flow line tubular),
it is necessary to predict fluid properties as a function of pressure and temperature.
PipeSim has a PVT section which can generate fluid properties using standard correlations
and allows them to be modified. In present work The Black Oil Glasø correlation has be used
to calculate the fluid properties. The Black oil correlations futures are described in chapter 5
of this work which deals with Multiphase flow in wells. Glasø PVT correlation has been
recommended for light North Sea crude by PipeSim Manual authors (PipeSim Manual)
developed from analysis of crude from the following fields: Ekofisk, Statfiord, Forties,
Valhall.

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
200
Figure D.1 Black Oil PipeSim input data window
The mathematical relationship between bubble point and solution gas oil ratio Rs given by
Glasø is 2255.1
172.0
989.0
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅= B
APIGs p
TR
γγ (D.1)
where T is in oF, 5.1315.141−=
OAPI γ
γ , γG is the specific gravity of gas (air = 1), γO is the
specific gravity of oil
The bubble point pressure is given by the relation
( )( )( )5.0log3093.31811.148869.210 p
Bp ⋅−−⋅= (D.2)
The other models available for Black Oil correlations in program are: Lasater, Standing,
Vasques and Begg. The Standing correlations are widely used in oil industry. They are based
primarily on California crude oils and these correlations do not correct for other oil types or

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
201
hydrocarbon content. Glasø modified the Standing correlation to make the independent of oil
type (Glasø, 1980).
Glasø’s oil formation volume factor correlation can be expressed mathematically as
A
oB 100.1 += (D.3)
where
( )2*log27683.0*log91329.258511.6 obob BBA −⋅+−= (D.4)
and B*ob is correlating number defined by
TRBO
Gsob ⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅= 968.0*
526.0
γγ
(D.5)
Glasø also presented the bubble point pressure. The proposed bubble point pressure
correlation can be expressed as (Glaso, 1980)
( )2*log30218.0*log7447.17669.1log bbb ppp ⋅−⋅+= (D.6)
with p* b a correlating number defined by
989.0
172.0816.0
*APIG
sb
TRp
γγ⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛= (D.7)
where Rs is in scf/STBO, T in oF, and γG is the total specific gravity of the surface gases.
Optionally the program allows defining the viscosity data for the required pressure and
temperature ranges. The viscosity of crude oil with dissolved gas is an important parameter in
pressure-loss calculations for flow in pipes. There are four steps to calculating the liquid
viscosity as follows:
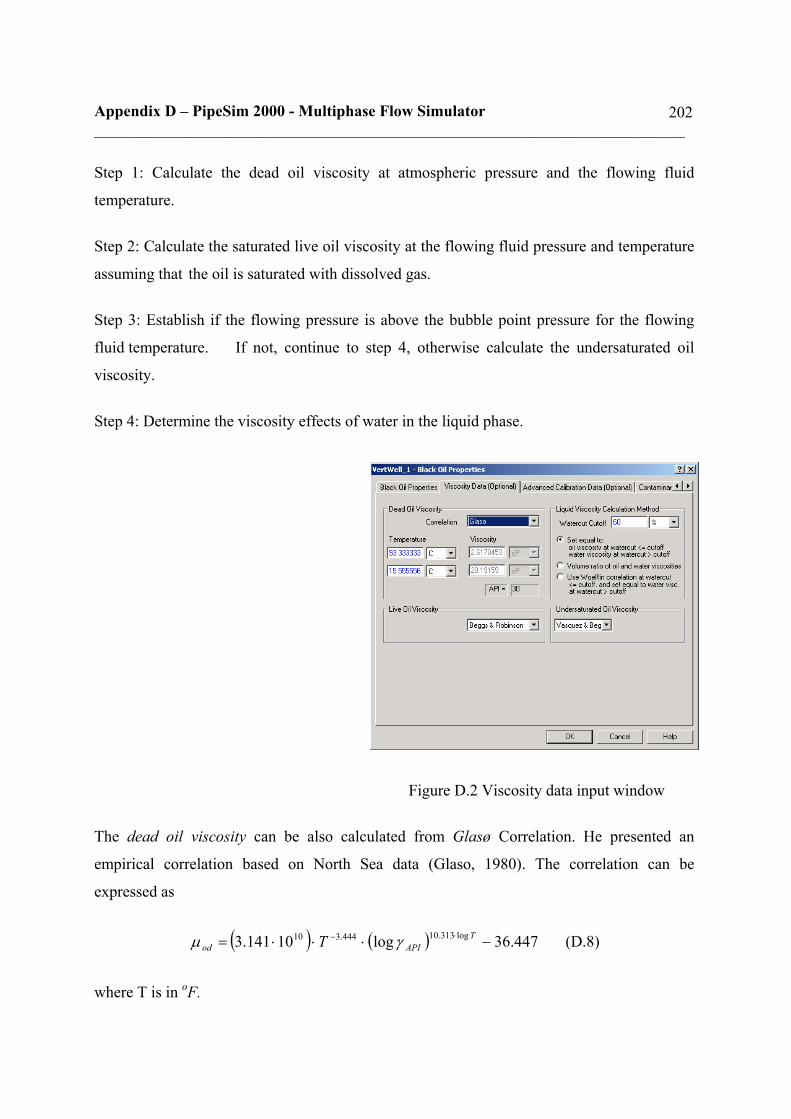
Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
202
Step 1: Calculate the dead oil viscosity at atmospheric pressure and the flowing fluid
temperature.
Step 2: Calculate the saturated live oil viscosity at the flowing fluid pressure and temperature
assuming that the oil is saturated with dissolved gas.
Step 3: Establish if the flowing pressure is above the bubble point pressure for the flowing
fluid temperature. If not, continue to step 4, otherwise calculate the undersaturated oil
viscosity.
Step 4: Determine the viscosity effects of water in the liquid phase.
Figure D.2 Viscosity data input window
The dead oil viscosity can be also calculated from Glasø Correlation. He presented an
empirical correlation based on North Sea data (Glaso, 1980). The correlation can be
expressed as
( ) ( ) 447.36log10141.3 log313.10444.310 −⋅⋅⋅= ⋅− TAPIod T γµ (D.8)
where T is in oF.

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
203
Saturated live oil viscosity depends on the solution-gas content. Oil viscosity decreases with
rising pressure as the solution gas increases, up to the bubble point pressure. There are few
correlations to determine the viscosity of saturated oil system, the Begs and Robinson
correlation has been chosen in present work. The empirical form of this equation is (Brill,
1999)
( )[ ] bodsO R µµ ⋅+⋅= − 515.0100715.10 (D.9)
where
( ) 338.015044.5 −+⋅= sRb (D.10)
Above the bubble point pressure, rising pressure increases the viscosity o foil because of its
compressibility. The correlation proposed by Vasquez and Beggs is the one of available in
PipeSim to calculate the undersaturated oil viscosity.
a
bObO p
p⎟⎟⎠
⎞⎜⎜⎝
⎛⋅= µµ (D.11)
where
b
pa 10187.16.2 ⋅⋅= (D.12)
and
( ) 55109.3 −− ⋅⋅−= pb (D.13)
D.1.2 Advanced calibration data
In many cases, actual measured values for some properties show a slight variance when
compared with the value calculated by the black oil model. In this situation it is useful to
"calibrate" the property using the measured point. PipeSim can use the known data for the
property to calculate a "calibration constant" Kc .

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
204
),(
),(
TPpropertycalculated
TPpropertymeasuredK C =
This calibration constant is then used to modify all subsequent calculations of the properties.
Properties which may be calibrated in this manner are; oil formation volume factor, gas
compressibility, live oil viscosity, gas viscosity.
Additionally PipeSim allows entering the fluid composition data
D.2 Profile model
I these work the vertical well performance analysis model has been selected for simulations.
The other models available in the program are; injection well performance, and surface and
facilities model. The program requests only the well hardware data required by the option
which was selected. This future is convenient because for particular section calculations full
model do not have to be built up, and I present work the surface equipment could be skipped.
The main window displays the designed model Figure D.3 and allows for easy access to each
of the section in order to model the required parameters.
Figure D.3 Designed model

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
205
The profile model section of the program allows describing the production tubing, SSSV
(Surface - Controlled Subsurface Safety Valve, Figure D.4), and restriction. Downhole
equipment parameters may be specified in program using one of the two options available,
the simple and detailed model. The displayed screed is different depending on the option
selected. Using the detailed model more factors to be taken into calculations but obviously
requires more data to be entered.
Figure D.4 Surface - Controlled Subsurface Safety Valve
D.2.1. Detailed model
The detailed profile contains following sections:
- Deviation survey
This section has been left empty in present work as the vertical well model has been assumed.
If such deviation data are available it may be copied to the program from other spreadsheet
applications.

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
206
- Geothermal survey
The geothermal survey and overall heat transfer coefficient need to be specified in the
detailed model. The program request at least two values at the wellhead and at the bottom.
The heat transfer coefficient describes the resistance to heat flow by all mechanisms
(convection, radiation and conduction) from the well to its surroundings. The program
proposes the typical default values of the coefficient that maybe used in calculations.
Temperature prediction may be performed using “enthalpy balance” temperature model. This
requires to define the well environment including all casing, string, cement tops, formation
lithology etc.
-Tubing configuration
The data entered in this section determines extend of tubing modelled. The program takes the
bottom of the last tubing as the fluid inflow point. Program offers the tubing tables containing
standard values of tubing and casing diameters. Also the wall thickness and roughness may
be specified using values given in the PipeSim tubing tables. Casing inner diameters are only
required if the flow is set to be annular or both tubing and annulus.
-Downhole equipment
This option allows specifying the necessary data depending on the equipment was selected.
Program allows to set up the following optional equipment properties: gas lift injection points,
ESP (Electrical Submersible Pumps), Choke, separator G/L (Gas/Lift) valve system, SSSV.
Perforations data may be also entered in this mode.
D.2.2. Simplified model
For present work simple model was utilized Figure D.5. This model requires the limited
number of information compared to the detailed motel described above. Deviation survey is
replaced by the one deviation angle from horizontal, where the kick off depth may be

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
207
specified. Temperate data are limited to the surface ambient and reservoir (well bottom).
Tubing limited up to the four sections, and if more are required detailed profile need to be
used. The downhole equipment assumed in simple mode contains only SSSV, G/L vale and
perforation data.
The accuracy of the equipment description may by verified by making an equipment
summary. The program draws and displays the simple sketch of designed downhole or
surface equipment.
Figure D.5 Simple profile mode
Figure D.5 Simple profile mode
D.3 IPR Data
In present work the one oil well the IPR curve was also calculated using PipeSim simulator.
This requires additional data defining the reservoir inflow performance. The program allows
for thirty inflow options including the oil and gas and gas condensate reservoirs, to model the
flow of fluids from the reservoir, trough the formation, and into the well. The choice which of
them should be used depends on the available information and the type of sensitivities that

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
208
are supposed to be run. This is beyond the scope of this work to present them all and there is
the bulk of the literature which describes those models.
The average reservoir pressure and reservoir temperature must be entered for inflow
performance models; however both the Multi-rate Fetkovich and Multi-rate Jones models can
be used to calculate the reservoir pressure. Well skin can be either directly entered or
calculated using Locke, Macleod or Karakas and Tariq methods for mechanical – geometrical
skin, and the Cino/Martia -Bronz or Wong - Clifford method for a deviation-partial
penetration skin. The Elf - Skin Aide model is also available.
The calculated IPR can be matched to measured data and used to calculate the IPR pressures
for any rate and water cut value. Also relative permeability can be applied to all IPR model in
PipeSim, and thus the total mobility of oil, gas and water may be determined.
For calculations in present work the Darcy inflow equation has been selected above the
bubble point and the Vogel solution below the bubble point. Required input is: reservoir
permeability (total permeability at the prevailing watercut and Rs), reservoir thickness
(thickness of the producing reservoir rock), - drainage area, - wellbore radius, Dietz shape
factor (to account for the shape of the drainage area). The additional data for simulations has
been taken from Kleppe Manuscript (1990), where author gives the characteristic of the most
Norwegian North Sea fields. The other mentioned models available in the program take into
considerations the deliverability change with time, non Darcy flow, multi-rate flow,
hydraulically fractured well, dual porosity, horizontal and multi layer wells.
D.4. Matching option
The matching option allows user for data quality control and fine adjustment of model
parameters to enable well model to produce observed data. Appropriately matched model is
requested for accurately performance prediction. The matching option offers the following
calculation options:
- Correlation comparison.

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
209
This option allows pressure gradient plots to be generated with different correlations to be
compared with the measured gradient survey data and each other.
- VLP and IPR matching
This option enables to tune the wellbore multiphase flow correlations to fit a range of
measured downhole pressures and rates. Once the VLP is matched, the IPR can be adjusted to
match the observed rates and pressures also.
- Gradient matching
Exits correlations can be modified using non-linear regression to best fit a gradient survey.
Comparison of the fit parameters will identify which correlation requires the least adjustment
to match the measured data.
- Surface pipe matching
The PipeSim program uses actual wellhead and manifold pressures together with temperature
data points to match the surface pressure drop correlations. Separate screens allow the match
parameters to be viewed and the best match selected.
- Tubing/pipeline correlations parameters
The match parameters can be inspected, reset or entered by and using this option. This
capability may be useful for troubleshooting, or to input match parameters determined
previously.
- Correlation thresholds
This is a capability of the program that allows specifying a threshold angle for both tubing
and pipeline correlations at which the program will automatically change to another specified
correlation. This option is particularly dedicated to the vertical risers in subsea completions to
be modeled more accurately.

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
210
D.5 VLP correlations and applications
It is no universal rule for selecting the best flow correlations for a given application. It is
recommended that correlation comparison always be carried out (PipeSim Manual). By
inspecting the predicted flow regimes and pressure results, the user can select correlation that
best models the physical situation.
In present work for oil wells calculations the Duns and Ros correlation was selected. This
correlation is recommended by PipeSim authors (PipeSim Manual) for vertical well
calculations. The following calculations are compared below PipeSim contains also the
correlations developed by Shell EP - Technology and Application Research, Those
correlations are described t combine the best futures of the existing correlations (Zabaras,
2000), and also contains additional futures for predicting low-rate VLP’s well stability or for
viscous, volatile, ad foamy oils. These correlations could not be used as requires additional
extra license for its use.
- Duns and Ros
This correlation was precisely described in previous chapter 5. The description presents the
basis of the original Duns and Ros published method. PipeSim contains the primary
correlation that was enhanced and improved for use wit condensates. The Duns and Ros
correlation performs well in mist flow cases and may be used in high Rs oil wells (Brill,
1999). It tends to overprotect VLP in oil wells. Despite this, the minimum stable rate
indicated by the VLP curve is often a good estimate (PipeSim Manual).
- Fancher Brown
It is a no slip holdup correlation that is provided in use as a quality control. It gives the lowest
possible value of VLP since it neglect the gas-liquid slip. It should always predict a pressure
which is less than he measured value. Even if it gives good match to measured downhole
pressure Fancher Brown should not be used on the quantitative work. Measured data falling

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
211
into the left of the Fancher Brown on the correlation comparison plot indicates the problem
with fluid density or field pressure data (PipeSim Manual).
- Orkiszewski
This correlation often gives a good match to measured data. However its formulation
includes a discontinuity in the calculation method. The discontinuity can cause instability
during the pressure matching process, thus is not recommended for calculations (PipeSim
Manual).
- Begs and Brill
The correlation is primarily horizontal pipeline correlation (Brill, 1999), thus was not taken
into account for wellbore simulations. It generally over predicts pressure drops in vertical and
deviated wells.
- OLGA-S steady-state
OLGA-S is based in larger part on data from the SINTEF two-phase flow laboratory near
Trondheim, Norway. The test facilities were designed to operate at conditions that
approximated field conditions. OLGA-S considers four flow regimes, stratified, annular, slug
and dispersed bubble flow and uses unique minimum slip criteria to predict flow regime
transitions. This correlation is available to all members of the SINTEF syndicate, and to non-
members on payment of the appropriate fees.
- Govier and Aziz
The correlation is used for pressure loss, holdup, and flow regime. The Govier, Aziz &
Fogarasi correlation was developed following a study of pressure drop in wells producing gas
and condensate and is thus recommended for them. The new prediction method incorporates
an empirical estimate of the distribution of the liquid phase between that flowing as a film on

Appendix D – PipeSim 2000 - Multiphase Flow Simulator __________________________________________________________________________
212
the wall and that entrained in the gas core. It employs separate momentum equations for the
gas-liquid mixture in the core and for the total contents of the pipe.
- BJA correlation
Baker Jardine & Associates have developed a correlation for two phase flow in gas-
condensate pipelines with a no-slip liquid volume fraction of lower than 0.1. This model
represents no major advance in theory, but rather a consolidation of various existing
mechanistic models, combined with a modest amount of theoretical development and field
data testing (PipeSim Manual). The model uses the Taitel Dukler flow regime map and a
modified set of the Taitel Dukler momentum balance to predict liquid holdup. The pressure
loss calculation procedure is similar in approach to that proposed by Oliemans, but accounts
for the increased interfacial shear resulting from the liquid surface roughness. The BJA
correlation is not recommended for systems having a non-slip liquid volume fraction greater
than 0.1. The quite extensive testing of the correlation against operating data has been
undertaken for horizontal and inclined flow, the test data for vertical flow is not so
comprehensive. (PipeSim Manual).
- Ansari:
The Ansari model was developed as part of the Tulsa University Fluid Flow Projects (TUFFP)
research program. A comprehensive model was formulated to predict flow patterns and the
flow characteristics of the predicted flow patterns for upward two-phase flow. The
comprehensive mechanistic model is composed of a model for flow pattern prediction and a
set of independent models for predicting holdup and pressure drop in bubble, slug, and
annular flows.
The basic plot and data fro calculations can be written to an Excel file by specifying one of
the Excel options for the output file format. This will then create an Excel data file called
with the extension .plt

Appendix E
HOLA 3.1 - Multiphase Flow Simulator

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
214
E.1. Introduction
The geothermal steam-water flow flowing temperature and pressure profiles has been
simulated using HOLA 3.1 wellbore geothermal simulator. The simulator can also determine
the relative contribution of each feedzone for a given discharge conditions. The flow within
the well is assumed steady-state at all times, but time changing reservoir pressures are
allowed. Te HOLA 3.1 simulator uses several files in its computations. The some of them are
created by the program but others are read only and must be construed as a text file with DOS
acceptable names and with program acceptable format. HOLA also creates the calculations
and iterations output files. The first contains pressure and temperature profile including
related parameters change across the wellbore. The second provides information on the
iterations executed by HOLA in order to obtain the above output file. Plot of calculated and
measured pressure and temperature can be drawn by the program. This option enables to
view the results of the simulations.
The simulator can handle both single and two-phase flows in vertical pipes and calculates the
flowing temperature and pressure profiles in a well. It solves numerically the differential
equations that describe the steady-state energy, mass and momentum flow in a vertical pipe.
The code allows for multiple feedzones, variable grid spacing and radius.
The code was developed in the Fortran programming language by Lawrence Berkley
Laboratory, University of California. A detailed description of the formulation used in the
simulator is given in a separate report by Bjornsson (1987). A reference to this publication is
made frequently in the following text.

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
215
The simulator is consistent with SI units in all calculations except for pressure (bar instead of
Pa) and enthalpy (kJ/kg instead of J/kg).
Before downhole calculations are performed with the simulator HOLA 3.1, a definition of all
input parameters is required. The following text gives the program description, and also
shows the approaches that were used in order to solve the program deficiency problems and
calculate required parameters.
E.2 Governing Equations
The flow of fluid in a geothermal well can be represented mathematically by two sets of
equations. Between the feedzones, the flow is represented by one-dimensional steady state
momentum, energy and mass flux balances. When a feedzone is encountered, mass and
energy balances between the fluid in the well and the feedzone are performed. The solution of
these equations require fully defined flow conditions at one end of the system (inlet
conditions) and fully defined boundaries (wellbore geometry, lateral mass and heat flow).
The governing equations are then solved in small, finite steps along the pipe.
Whenever a feedzone is encountered, the mass and energy of inflow (or outflow) are known
and mass and energy balances performed, allowing for continuation of the calculations.
The governing steady-state differential equations for mass, momentum and energy flux in a
vertical well have already been given in chapter 5, I will bring them again here in simple
form:

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
216
0=dzdm (E.1)
accelevf dzdp
dzdp
dzdp
dzdp
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛= (E.2)
QdzdEt ±= (E.3)
where m is the total mass flow, p is pressure, Et is the total energy flux in the well and z is the
depth coordinate. Q denotes the ambient heat loss over a unit distance. The plus and minus
signs indicate down flow and up flow respectively. The pressure gradient is composed of
three terms: wall friction, acceleration of fluid and change in gravitational load over dz. The
above terms were described in detail in chapter 5 which deals with multiphase flow in wells.
The governing equation of flow between the well and the reservoir is:
( )wfrG
GrG
L
LrLfeed pP
kkPIm −⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⋅+
⋅⋅=
µρ
µρ
(E.4)
where mfeed is the feedzone flowrate, PI is the productivity index of the feedzone, kr is the
relative permeability of the phases (subscripts L for liquid and G for steam), µ is the dynamic
viscosity, ρ is density, pr is the reservoir pressure and pwf is the flowing pressure in the well.
The relative permeabilities are here calculated by linear relationships (krG = S and krL = 1-S
where S is the volumemetric steam saturation of the reservoir). A flow into the well is
positive and flow from the well into the formation takes a negative sign (Bjornsson, 1987).

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
217
E.3 The computational models of HOLA 3.1
The simulator HOLA offers six modes of calculating downhole conditions in geothermal
wells. These are:
1. Outlet conditions known at the wellhead: The simulator calculates pressure,
temperature and saturation profiles from given wellhead conditions and given flowrates and
enthalpies at each feedzone except the bottom one.
2. Required wellhead pressure and multiple feedzones: The simulator finds the
downhole conditions that fulfill a required wellhead pressure. Also given are the productivity
indices, reservoir pressure and enthalpies at each feedzone. The feedzones must have a
positive flowrate.
3. Required wellhead pressure and two feedzones: This mode is similar to mode 2,
except that only two feedzones are allowed and each can either accept or discharge fluid.
4. Required wellhead flowrate and two feedzones: In this mode, the simulator finds
downhole conditions that fulfill a required wellhead flowrate. Only positive flow is allowed
from the feedzones.

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
218
5. Required wellhead injection rate and two feedzones: The simulator iterates for the
downhole conditions that provide the required wellhead injection rate. Only two feedzones
are allowed and both must accept fluid. Thus has negative flowrates in the program.
6. Variations in wellhead pressure and enthalpy for a constant flowrate and given
reservoir pressure history at two feedzones: This mode is similar to mode 4, except that now
a history is specified for the reservoir pressure. Only two feedzones are allowed and both
must discharge to the well.
E.4 Heat loss parameters
The simulator handles heat transfer between the well and the reservoir by formulation given
by Bjornsson (1987). The heat loss parameters necessary are:
- rock thermal conductivity
- rock densities
- rock heat capacity
- time passed from initial discharge
These parameters specify the thermal conductance to the ambient rocks. The parameters used
in present work have been taken from Prats SPE paper (2001). His work treats about steam
injected to the reservoir, but the heat transferred from steam to the reservoir goes on the same
rules like for geothermal wells, and the typical rock properties presented in his work given in

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
219
the appendix (7.1.) are assumed to be appropriate for these simulations. 2 W/m/°C, 2800
kg/m3, are used for the rock thermal conductivity and density respectively. The heat loses in
this option may also be neglected when the thermal conductivity value is set to be zero in this
option.
In addition a lateral temperature gradient between the well and the ambient may be
established defining a reservoir temperature curve from the surface to the feedzone level. The
simulator requires in this option the temperature value at given depth and then interpolates
linearly between these data points in order to evaluate the formation temperature gradient.
E.5 Wellbore geometry
The wellbore geometry need to be specified. The program allows for two different tubing
diameter segments. The inflow is interpreted to be at the bottom of the deeper section, thus in
the cases where the last feedzone does not occur at the well bottom the apparent depth need
to be set equal to the depth of the lowest feedzone. The well inner radius and wall roughness
need to be specified. The well roughness in present work was assumed to be 0.024 mm, and
was taken from the PipeSim Table E.1.
The downhole computations proceed along the well in finite-difference steps of ∆z. After
each step the flowing conditions of the well are calculated at the subsequent nodal points
defined in the program. The nodal points divide well into depth segments where parameters
of the well like diameter or feedzones may change. The distance between the nodal points are

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
220
defined by the user. More than 25 m distance is suggested by the program authors due to
computer speed, however current PC handle the calculations for 1m nodal distance with few
seconds.
E.6 Feedzone properties
The feedzone properties that must be specified in the program depends on the computational
models selected. In mode 1 only the number of the feedzones, flowrate and the enthalpy of
the each feedzone except the bottom one must be specified. The properties of the bottom
feedzone, by conservation principles, are simply the residuals of the wellhead energy and
mass flow minus energy and mass flow of all the other feedzones. Using the other program
modes additionally productivity index, enthalpy and pressure at the feedzone need to be
entered A special care must be taken in specifying the feedzone enthalpies or one may end up
with negative temperatures in the well.
In present work only one feedzone was assumed for calculation, and some problem has
occurred due to the mode 4 requires two or more feedzones to be specified. The problem was
solved by placing both feedzones with a short distance of 20 m and assuming the same
conditions for both feedzones. Such system may be assumed to work as the one feedzone.

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
221
E.7. Velocities of individual phases
The simulator HOLA 3.1 offers four different methods of calculating the average cross
sectional velocities of steam and water in a flowing well. Four different methods of
calculating the average cross sectional are available in the program. All of the methods have
their limitations and it is difficult to know which of them is best for a certain well.
Experience in using wellbore simulators and access to downhole data in the well under
consideration will often provide an appropriate selection of the phase velocity method.
In present work the Orkiszewski correlation was used. The description and the
recommendation for this choice are given in chapter 5, which deals with the multiphase flow.
The other correlations available are Armand, Chisholm and Bjornsson (for the 9 5/8” wells)
The Armand relations are semi empirical and based on limited experimental data, collected in
small diameter pipes at low flowrates (Bjornsson, 1987). The Chisholm in his correlation
proposed the relation for slip in the form
G
LL
G
xx
xx
kρρρ
ρ
⋅−
⋅+
⋅−
+⋅+=
14.01
14.016.04.0 (E.5)
This formula was modified in program for low pressure and low mass saturation of steam.
Existing downhole pressure profiles were used to estimate the slip ratio and a correction

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
222
factor to the Chisholm formula defined. A care should be taken in the use of this relation
since it still needs validation (Bjornsson, 1987).
E.8 Productivity Index estimation
The IPR curves were calculated for the wells examples under considerations in this work in
order to asses the performance and fin the well operating point for two tubing diameter sizes.
This requires productivity index to be known for particular well that is the mathematical
means of expressing the ability of a reservoir to deliver the fluids to the wellbore. The
performance relationships are presented in Chapter 3. and here only the technical approach
used in order to determine the productivity index is described.
HOLA 3.1 simulator has not a detailed mode to calculate the productivity index, and the
productivity index was estimated from number of repeated simulations made in mode 2. The
wellhead parameters including temperature and flowing pressure and reservoir average
pressure was known. The enthalpy in this mode may be defined only at the feedzone thus in
the first step the enthalpy was adjusted from several simulation to arrive at the appropriate
wellhead temperature. Then initial guess for the productivity index was entered and the
obtained wellhead mass flowrate was compared with required. Increasing or decreasing the
productivity index results in estimation of the productivity index. Such approach was
necessary in present work, because there was no specific data about the reservoir parameters
available.
The vertical lift performance (VLP) curves for geothermal wells, was also calculated from
HOLA 3.1. The downhole flowing pressure pwf was calculated several times for the same

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
223
wellhead pressure but different flowrates with the 2 kg/s step. The curves revealed to have the
unstable shape probably due to a problem with the simulator, e.g. because of flow regimes
and/or fluid properties. The curve fitting application in MATHLAB 6.5 program allowed to
get rid of the curves fluctuations and draw the plots.

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
224
Table E.1 Thermal Conductivities
Material Density Thermal Conductivity Thermal Conductivity
(kg/m3) Btu/hr/ft/F (W/m/K)
Anhydrite 0.75
Carbon Steel 7900 28.9 50
Concrete Weight Coat 2000 - 3000 0.81 - 1.15 1.4 - 2.0
Corrosion Coat (Bitumen) - 0.19 0.33
Corrosion Coat (Epoxy) - 0.17 0.30
Corrosion Coat (Polyurathane) - 0.12 0.20
Dolomite 1.0
Gypsum 0.75
Halite 2.8
Ice 900 1.27 2.2
Lignite 2.0
Limstone 0.54
Line pipe 27 46.7
Mild Steel tubing 26 45
Mud 1500 0.75 - 1.5 1.3 - 2.6
Neoprene Rubber - 0.17 0.3
Plastic coated pipe 20 34.6
Plastic coated tubing 20 34.6
Polyurathane Foam (dry) 30 - 100 0.011 - 0.023 0.02 - 0.04
Polyurathane Foam (wet) - 0.023 - 0.034 0.4 - 0.6
PVC Foam (dry) 100 - 340 0.023 - 0.025 0.040 - 0.044

Appendix E – HOLA 3.1 - Multiphase Flow Simulator __________________________________________________________________________
225
Sandstone 1.06
Shale 0.7
Stainless Steel - 8.67 15
Stainless steel (13%) 18 31.14
Stainless steel (15%) 15 26
Syntactic Foam (dry) 500 0.052 0.09
Syntactic foam (wet) - .017 0.3
Volcanics 1.6
Wet Sand 1600 1.04 - 1.44 1.8 - 2.5
Table 7.2 Roughness Material ft. in
Drawn tubing(brass, lead, glass, and the like) 0.000005 0.00006
Commercial steel or wrought iron 0.00015 0.0018
Asphalted cast iron 0.0004 0.0048
Galvanized iron 0.0005 0.006
Cast iron 0.00085 0.010
Wood stave 0.0006-0.003 0.0072-0.036
Concrete 0.001-0.01 0.012-0.12
Riveted steel 0.003-0.03 0.036-0.36

Appendix F
Simulations results in oil wells