mit international journal of electrical and...
TRANSCRIPT
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 33
Protection of Transmission System Using Global Positioning System
Saurabh SaxenaA.P., EE and I Department
MIT, MoradabadEmail: [email protected]
Kapil GandhiA.P., EE and I Department
MIT, MoradabadEmail: [email protected]
Maroof AliA.P., EE and& I Department
MIT, MoradabadEmail: [email protected]
Nihar RanjanB.Tech. Student (EE)
MIT, MoradabadEmail: [email protected]
ABSTRACTThis paper representsthe technique for the protection of transmission systems by using the global positioning system (GPS) and fault generated transients. In this scheme the relay contains a fault transient detection system together with a communication unit, which is connected to the power line through the high voltage coupling capacitors of the CVT. Relays are installed at each bus bar in a transmission network. These detect the fault generated high frequency voltage transient signals and record the time instant corresponding to when the initial traveling wave generated by the fault arrives at the busbar. The decision to trip is based on the components as they propagate through the system. Extensive simulation studies of the technique were carried out to examine the response to different power system and fault condition. The communication unit is used to transmit and receive coded digital signals of the local information to and from associated relays in the system. At each substation relay determine the location of the fault by comparing the GPS time stay measured locally with those received from the adjacent substations, extensive simulation studies presented here demonstrate feasibility of the scheme.Keywords: GPS, GIS, Traveling Waves.
I. INTRODUCTIONAccurate location of faults on power transmission systems can save time and resources for the electric utility industry. Line searches for faults are costly and can be inconclusive. Accurate information needs to be acquired quickly in a form most useful to the power system operator communicating to field personnel.
To achieve this accuracy, a complete system of fault location technology, hardware, communications, and software systems can be designed. Technology is available which can help to determine fault location to within a transmission span of 300 meters. Reliable self monitoring hardware can be configured for installation sits with varying geographic and environmental conditions. Communications systems can retrieve fault location information from substations and quickly provide that information to systems can retrieve fault location information from substations and quickly provide that information to system operations. Other communication systems, such as Supervisory Control and Data Acquisition
(SCADA), operate fault sectionalizing circuit breakers and switches remotely and provide a means of fast restoration. Data from SCADA, such as sequence of events, relays, and oscillographs, can be used for fault location selection and verification. Software in a central computer cancollect fault information and reduce operator response time by providing only the concise information required for field personnel communications. Fault location systems usually determine “distance to fault” from a transmission line end. Field personnel can use this data to find fault locations from transmission line maps and drawings.
Some utilities have automated this process by placing the information in a fault location Geographical Information System (GIS) computer. Since adding transmission line data to the computer can be a large effort, some utilities have further shortened the process by utilizing a transmission structures location database. Several utilities have recently created these databases for transmission inventory using GPS location technology and handheld computers.
ISSN 2230-7656 (c) MIT Publications
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 34
The inventor database probably contains more information than needed for a fault location system, and a reduced version would save the large data-collection effort. Using this data, the power system operator could provide field personnel direct location information.
Field personnel could use online information to help them avoid spending valuable times looking for maps and drawings and possibly even reduce their travel time. With precise information available, crews can prepare for the geography, climatic conditions, and means of transport to the faulted location. Repair time and resources would be optimized by the collected data before departure. Accurate fault location can also aid in fast restoration of power, particularly on transmission lines with distributed loads. Power system operators can identify and isolate faulted sections on taploaded lines and remove them by opening circuit breakers or switches remotely along the line, restoring power to the tap loads serviced by the unfaulted transmission sections.
II. TRANSMISSION SYSTEMElectric power transmission, a process in the delivery of electricity to consumers, is the bulk transfer of electrical power. Typically, power transmission is between the power plant and
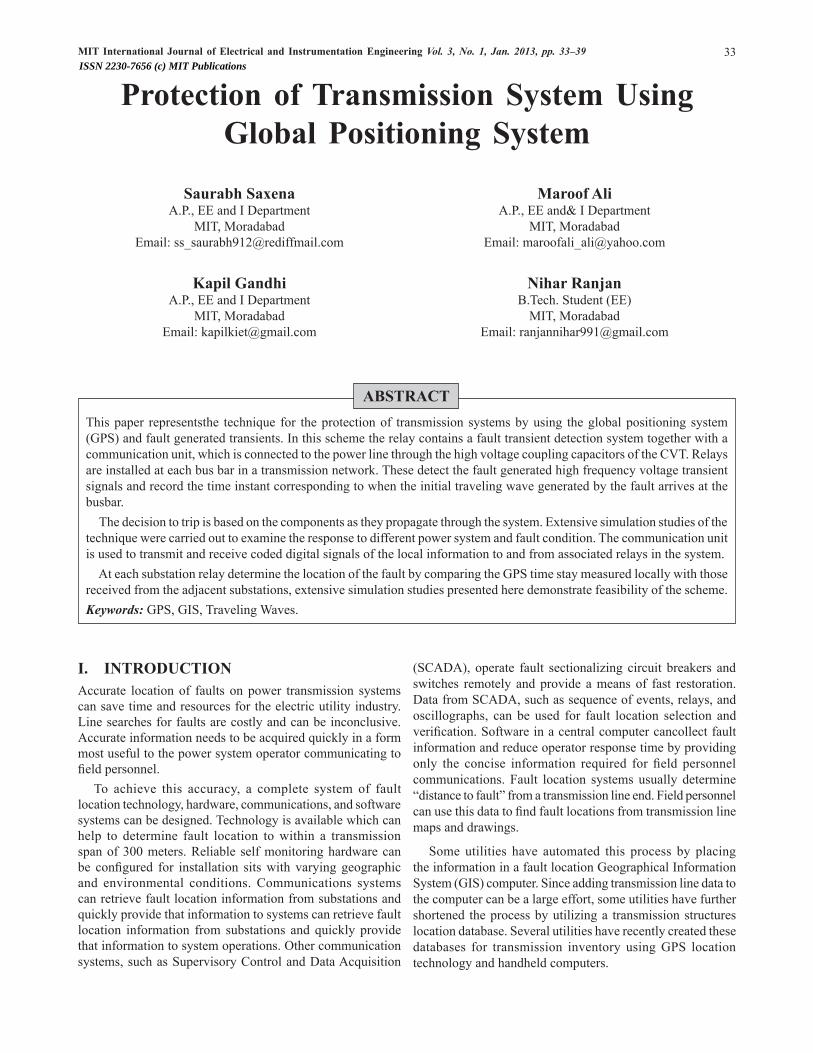
a substation near a populated area. Electricity distribution is the delivery from the substation to the consumers. Electric power transmission allows distant energy sources (such as hydroelectric power plants) to be connected to consumers in population centers.
Generation Transmission DistributionDue to the large amount of power involved, transmission normally takes place at high voltage (110 kV or above). Electricity is usually transmitted over long distance through overhead power transmission lines. Underground power transmission is used only in densely populated areas due to its high cost of installation and maintenance, and because the high reactive power produces large charging currents and difficulties in voltage management. A power transmission system is sometimes referred to colloquially as a “grid”; however, for reasons of economy, the network is not a mathematical grid. Redundant paths and lines are provided so that power can be routed from any power plant to any load center, through a variety of routes, based on the economics of the transmission path and the cost of power. Much analysis is done by transmission companies to determine the maximum reliable capacity of each line, which, due to system stability considerations, may be less than the physical or thermal limit of the line.
Figure 1: Electrical Power System (generation, transmission and distributions)
III. TRANSMISSION LINE PROTECTIONA system including a number of subsystems having dedicated protection units which are dedicated to the protection of specific transmission lines and associated power equipment, each subsystem having stand-alone capability. The subsystems are interfaced to a central computer through a remote control communications interface unit. Each subsystem includes a microprocessor which interfaces with the corresponding transmission line or associated power equipment to be protected through converters, sensors, contractors, direct digital control equipment and the like. The central computer is capable of performing real time modification by addressing each subsystem to change local protection parameters thereof to fit system needs.
IV. TRAVELING WAVE FAULT LOCATIONFaults on the power transmission system cause transients that propagate along the transmission line as waves. Each wave is a composite of frequencies, ranging from a few kilohertz to several megahertz, having a fast rising front and a slower decaying tail. composite waves have a propagation velocity and characteristic impedance and travel near the speed of light away from the fault location toward line ends. They continue to travel throughout the power system until they diminish due to impedance and reflection waves and a new power system equilibrium is reached.
The location of faults is accomplished by precisely time-tagging wave fronts as they cross a known point typically in substations at line ends. With waves time tagged to sub
ISSN 2230-7656 (c) MIT Publications
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 35
microsecond resolution of 30 m, fault location accuracy of 300 m can be obtained. Fault location can then be obtained by multiplying the wave velocity by the time difference in line ends. This collection and calculation of time data is usually done at a master station. Master station information polling time should be fast enough for system operator needs.
V. BENEFITS OF TRAVELING WAVE FAULT LOCATION
Early fault locators used pulsed radar. This technique uses reflected radar energy to determine the fault location. radar equipment is typically mobile or located at substations and requires manual operation. This technique is popular for location of permanent faults on cable sections when the cable is de-energized. Impedance-based fault locators are a popular means of transmission line fault locating. They provide algorithm advances that correct for fault resistance and load current inaccuracies. Line length accuracies of +5% are typical for single-ended locators and 1–2% for two-ended locator systems. Traveling wave fault locators are becoming popular where higher accuracy is important. Long lines, difficult accessibility lines, high voltage direct current (HVDC), and series-compensated liens are popular applications. Accuracies of <300 meters have been achieved on 50 kV transmission lines with this technique. Hewlett-Packard has developed a GPS-based sub microsecond timing system that has proven reliable in several utility traveling wave projects. This low-cost system can also be used as the substation master clock.
VI. TRAVELING WAVE FAULT LOCATION THEORY
Traveling wave fault locators make use of the transient signals generated by the fault. When a line fault occurs, such as an insulator flashover or fallen conductor, the abrupt change in voltage at the point of the fault generates a high frequency electromagnetic impulse called the traveling wave which propagates along the line in both directions away from the fault point at speeds close to the of light.
Unlike impedance-based fault location systems, the traveling wave fault locator is unaffected by load conditions, high ground resistance and most notably, series capacitor banks. This fault locating technique relies on precisely synchronized clocks at the line terminals which can accurately time-tag the arrival of the traveling wave. The propagation velocity of the traveling wave is roughly 300 meters per microsecond which in turn requires the clocks to be synchronized with respect to each other by less than one microsecond.
Precisely synchronized clocks are the key element in the implementation of this fault location technique. The required level of clock accuracy has only recently been available at reasonable cost with the introduction of the Global Positioning System.
The voltage and current at any point x obey the partial differential
∂∂
= -∂∂
∂∂
= -∂∂
e
xL
i
tand
i
xC
e
twhere L and C are the inductance and capacitance of the line per unit length. The resistance is assumed to be negligible. The solutions of these equations are
e x t e x vt e x vt l x t
xe x vt
ze x vt
r r
r r
( , ) ( ) ( ) ( , )
( ) ( )
= - + +
= - - +1 1
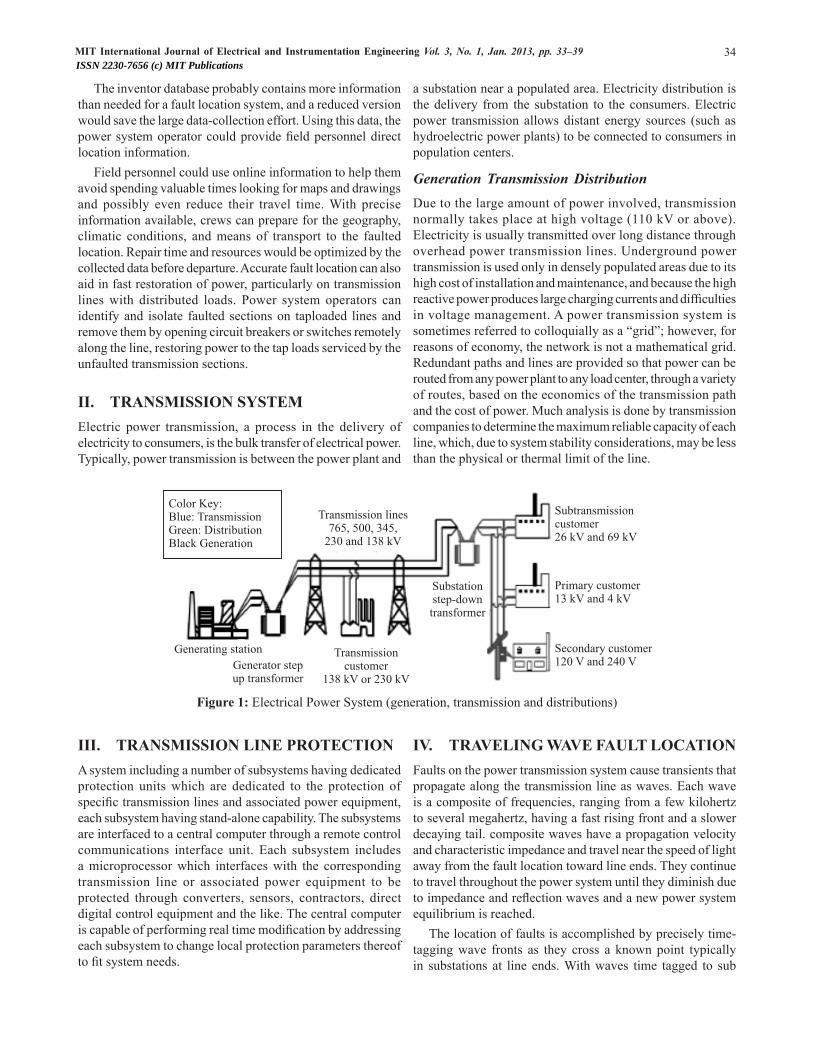
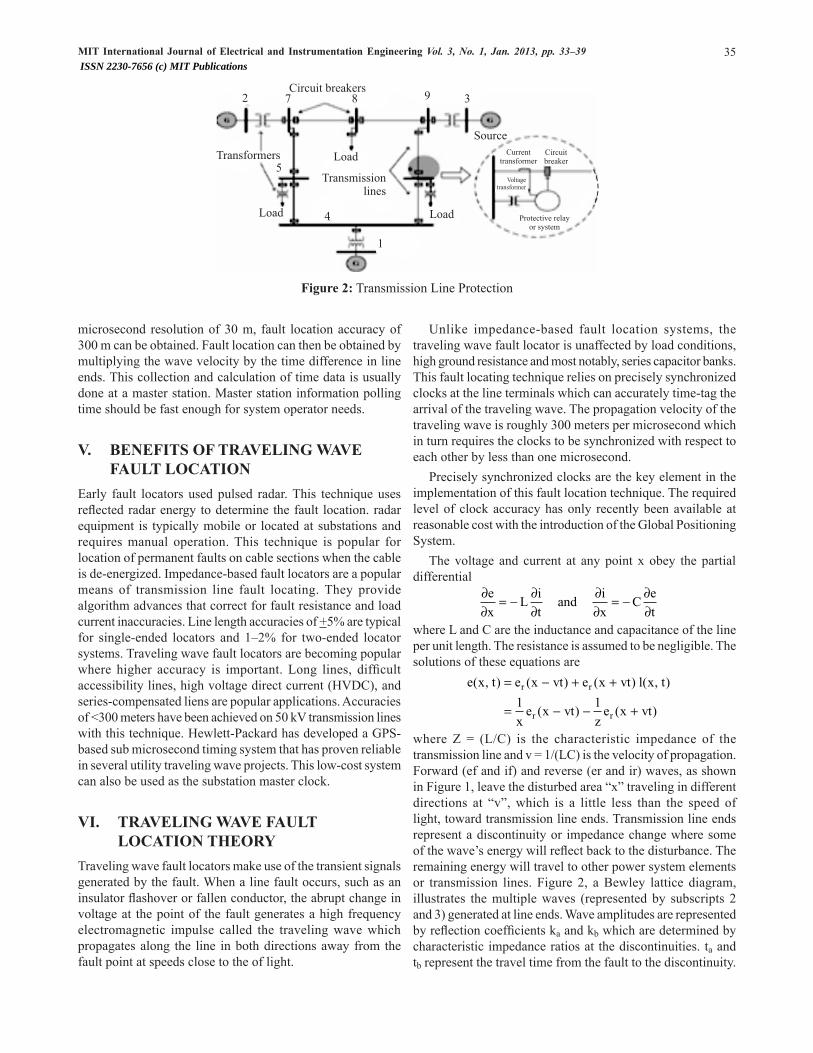
where Z = (L/C) is the characteristic impedance of the transmission line and v = 1/(LC) is the velocity of propagation. Forward (ef and if) and reverse (er and ir) waves, as shown in Figure 1, leave the disturbed area “x” traveling in different directions at “v”, which is a little less than the speed of light, toward transmission line ends. Transmission line ends represent a discontinuity or impedance change where some of the wave’s energy will reflect back to the disturbance. The remaining energy will travel to other power system elements or transmission lines. Figure 2, a Bewley lattice diagram, illustrates the multiple waves (represented by subscripts 2 and 3) generated at line ends. Wave amplitudes are represented by reflection coefficients ka and kb which are determined by characteristic impedance ratios at the discontinuities. ta and tb represent the travel time from the fault to the discontinuity.
Figure 2: Transmission Line Protection
ISSN 2230-7656 (c) MIT Publications
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 36
With GPS technology, ta and tb can be determined very precisely.
By knowing the length (l) of the line and the time of arrival difference
(ta – tb), one can calculate the distance (x) to the fault from substation A by:
x
c t ta b=- -1
2
( )
where c = the wave propagation of 299.79 km/microsec(1ft/ns).
Figure 3: Bewley Lattice Diagram.
VIII. THE GLOBAL POSITIONING SYSTEM
The Global Positioning System (GPS) is a satellite-based navigation system made up of a network of 24 satellites placed into orbit. GPS was originally intended for military applications, but in the 1980s, the government made the system available for civilian use. GPS works in any weather conditions, anywhere in the world, 24 hours a day. GPS Technology allows precise determination of location, velocity, direction, and time. GPS are space-based radio positioning systems that provide time and three-dimensional position and velocity information to suitably equipped users anywhere on or near the surface of the earth (and sometimes off the earth).
Concept of satellite navigation was first conceived after the launch of Sputnik 1 in 1957 when scientists realized that by measuring the frequency shifts in the small bleeps emanating from this first space vehicle it was possible to locate a point on the earth’s surface. The NAVSTAR system, operated by the US Department of Defense, is the first such system widely available to civilian users. The Russian system, GLONASS, is similar in operation and may prove complimentary to the NAVSTAR system. Current GPS systems enable users to determine their three dimensional differential position, velocity and time. By combining GPS with current and future computer mapping techniques, we will be better able to identify and manage our natural resources. Intelligent vehicle location and navigation systems will let us avoid congested freeways and more efficient routes to our destinations, saving millions of dollars in gasoline and tons of air pollution. Travel aboard ships
and aircraft will be safer in all weather conditions. Businesses with large amounts of outside plant (railroads, utilities) will be able to manage their resources more efficiently, reducing consumer costs.
GPS satellites circle the earth twice a day in a very precise orbit and transmit signal information to earth. GPS receivers take this information and use triangulation to calculate the user’s exact location. Essentially, the GPS receiver compares the time a signal was transmitted by a satellite with the time it was received. The time difference tells the GPS receiver how far away the satellite is. Now, with distance measurements from a few more satellites, the receiver can determine the user’s position and display it on the unit’s electronic map. By knowing the distance from another satellite, the possible positions of the location are narrowed down to two points (Two intersecting circles have two points in common). A GPS receiver must be locked on to the signal of at least three satellites to calculate a 2D position (latitude and longitude) and track movement. With four or more satellites in view, the receiver can determine the user’s 3D position (latitude, longitude and altitude). Once the user’s position has been determined, the GPS unit can calculate other information, such as speed, bearing, track, trip distance, distance to destination, sunrise and sunset time and more. Accurate 3-D measurements require four satellites. To achieve 3-D real time measurements, the receivers need at least four channels.
1. The Gps Satellite SystemThe 24 satellites that make up the GPS space segment are orbiting the earth about 142,000 miles above us. They are constantly moving, making two complete orbits in less than 24 hours. These satellites are traveling at speeds of roughly 7,000 miles an hour. GPS satellites are powered by solar energy. They have backup batteries onboard to keep them running in the event of a solar eclipse, when there’s no solar power. Small rocket boosters on each satellite keep them flying in the correct path.
Here are some other interesting facts about the GPS satellites (also called NAVSTAR, the official U.S. Department of Defense name for GPS :
The first GPS satellite was launched in 1978.A full constellation of 24 satellites was achieved in 1994.Each satellite is built to last about 10 years. Replacements
are constantly being built and launched into orbit.A GPS satellite weights approximately 2,000 pounds and is
about 17 feet across with the solar panels extended.Transmitter power is only 50 watts or less.
2. Implementation and TestingEvaluation of the fault locator involved the installation of GPS timing receivers at four 500 kV substations, see Figure 11.1. A especially developed Fault Transient Interface Unit (FTIU) connects to the transmission lines
ISSN 2230-7656 (c) MIT Publications
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 37
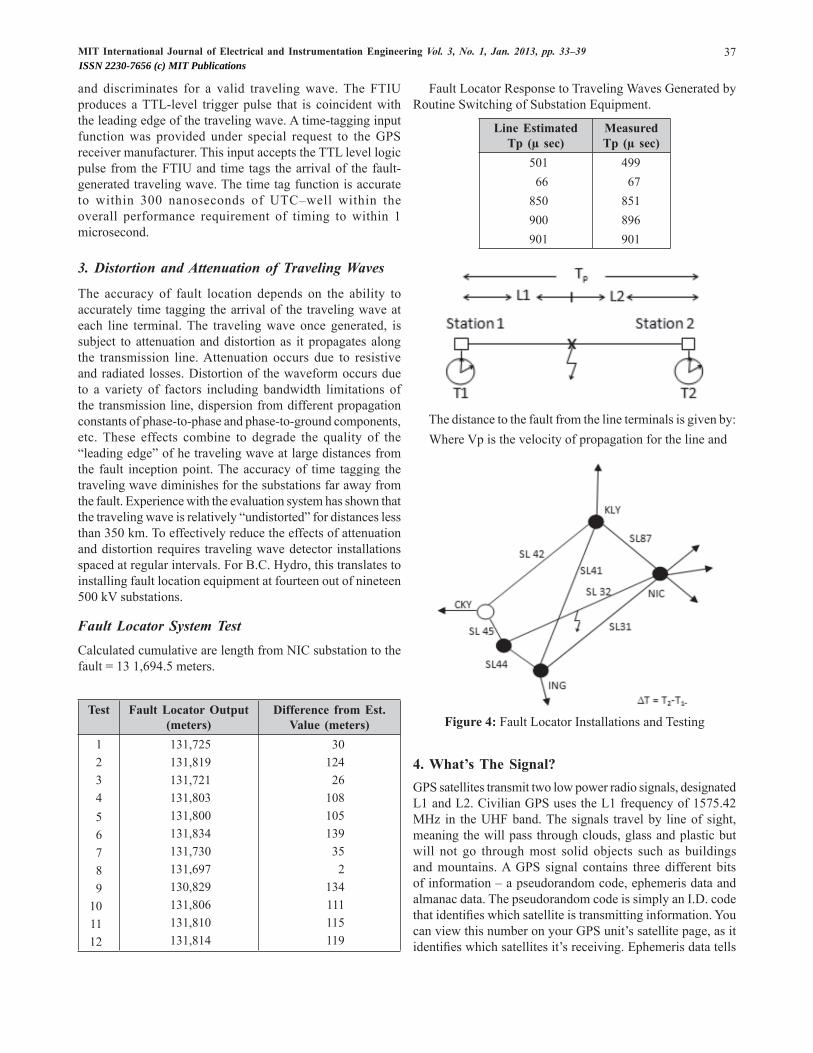
and discriminates for a valid traveling wave. The FTIU produces a TTL-level trigger pulse that is coincident with the leading edge of the traveling wave. A time-tagging input function was provided under special request to the GPS receiver manufacturer. This input accepts the TTL level logic pulse from the FTIU and time tags the arrival of the fault- generated traveling wave. The time tag function is accurate to within 300 nanoseconds of UTC–well within the overall performance requirement of timing to within 1 microsecond.
3. Distortion and Attenuation of Traveling Waves
The accuracy of fault location depends on the ability to accurately time tagging the arrival of the traveling wave at each line terminal. The traveling wave once generated, is subject to attenuation and distortion as it propagates along the transmission line. Attenuation occurs due to resistive and radiated losses. Distortion of the waveform occurs due to a variety of factors including bandwidth limitations of the transmission line, dispersion from different propagation constants of phase-to-phase and phase-to-ground components, etc. These effects combine to degrade the quality of the “leading edge” of he traveling wave at large distances from the fault inception point. The accuracy of time tagging the traveling wave diminishes for the substations far away from the fault. Experience with the evaluation system has shown that the traveling wave is relatively “undistorted” for distances less than 350 km. To effectively reduce the effects of attenuation and distortion requires traveling wave detector installations spaced at regular intervals. For B.C. Hydro, this translates to installing fault location equipment at fourteen out of nineteen 500 kV substations.
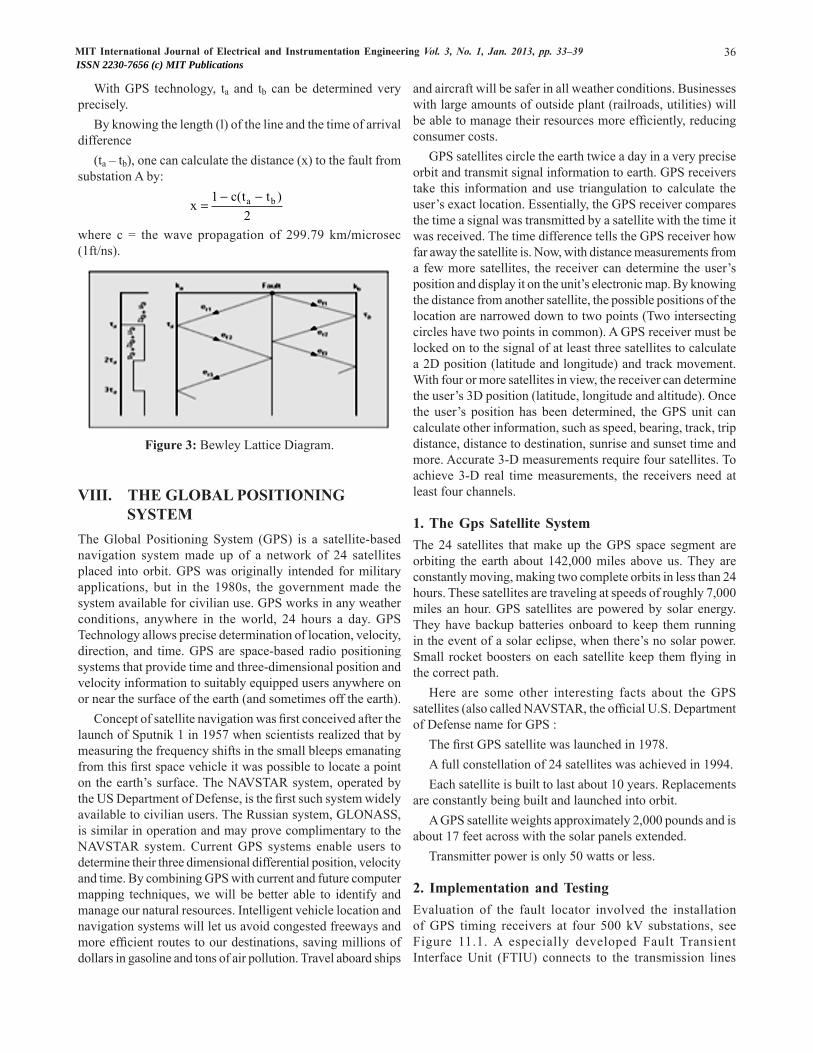
Fault Locator System TestCalculated cumulative are length from NIC substation to the fault = 13 1,694.5 meters.
Test Fault Locator Output(meters)
Difference from Est. Value (meters)
123456789
101112
131,725131,819131,721131,803131,800131,834131,730131,697130,829131,806131,810131,814
3012426
108105139352
134111115119
Fault Locator Response to Traveling Waves Generated by Routine Switching of Substation Equipment.
Line Estimated Tp (µ sec)
Measured Tp (µ sec)
50166
850900901
49967
851896901
The distance to the fault from the line terminals is given by:Where Vp is the velocity of propagation for the line and
Figure 4: Fault Locator Installations and Testing
4. What’s The Signal?GPS satellites transmit two low power radio signals, designated L1 and L2. Civilian GPS uses the L1 frequency of 1575.42 MHz in the UHF band. The signals travel by line of sight, meaning the will pass through clouds, glass and plastic but will not go through most solid objects such as buildings and mountains. A GPS signal contains three different bits of information – a pseudorandom code, ephemeris data and almanac data. The pseudorandom code is simply an I.D. code that identifies which satellite is transmitting information. You can view this number on your GPS unit’s satellite page, as it identifies which satellites it’s receiving. Ephemeris data tells
ISSN 2230-7656 (c) MIT Publications

MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 38
the GPS receiver where each GPS satellite should be at any time throughout the day. Each satellite transmits ephemeris data showing the orbital information for that satellite and for every other satellite in the system. Almanac data, which is constantly transmitted by each satellite, contains important information about the status of the satellite (healthy or unhealthy), current date and time. This part of the signal is essential for determining a position.
5. How Accurate is GPS?Today’s GPS receivers are extremely accurate, thanks to their parallel multi-channel design. 12 parallel channel receivers are quick to lock onto satellites when first turned on and they maintain strong locks, even in dense foliage or urban settings with tall buildings. Certain atmospheric factors and other sources of error can affect the accuracy of GPS receivers. GPS receivers are accurate to within 15 meters on average. Newer GPS receivers with WAAS (Wide Area Augmentation System) capacity can improve accuracy to less than three meters on average. No additional equipment or fees are required to take advantage of WAAS. Users can also get better accuracy with Differential GPS (DGPS), which corrects GPS signals to within an average of three to five meters. The U.S. Coast Guard operates the most common DGPS correction service. This system consists of a net work of towers that receive GPS signals and transmit a corrected signal by beacon transmitters. In order to get the corrected signal, users must have a differential beacon receiver and beacon antenna in addition to their GPS.
6. Sources of GPS Signal ErrorsFactors that can degrade the GPS signal and thus affect accuracy include the following: 1. Ionosphere and troposphere delays: The satellite
signal slows as it passes through the atmosphere. The GPS system uses a built-in model that calculates an average amount of delay to partially correct for this type of error.
2. Signal multipath: This occurs when the GPS signal is reflected off objects such as tall buildings or large rock surfaces before it reaches the receiver. This increases the travel time of the signal, thereby causing errors.
3. Receiver clock errors: A receiver’s built-in clock is not as accurate as the atomic clocks onboard the GPS satellites. Therefore, it may have very slight timing errors.
4. Number of satellites visible: The more satellites a GPS receiver can “see,” the better the accuracy Buildings, terrain, electronic interference, or sometimes even dense foliage can block signal reception, causing position errors or possibly no position reading at
all. GPS units typically will not work indoors, underwater or underground.
5. Satellite geometry/shading: This refers to the relative position of the satellites at any given time. Ideal satellite geometry exists when the satellites are located at wide angles relative to each other. Poor geometry results when the satellites are located in a line or in a tight grouping.
6. International degradation of the satellite signal: Selective Availability (SA) is an intentional degradation of the signal once imposed by the U.S. Department of Defense. SA was intended to prevent military adversaries from using the highly accurate GPS signals. The government turned off SA in May 2000, which significantly improved the accuracy of civilian GPS receivers.
VIII. CONCLUSION
Thus the use of GPS in protection of transmission systems is beneficial with respect to Value regarding programmatic goals: more reliable monitoring using GPS related technologies. Technical merit: new fault location algorithm based on new input data.Emphasis on transfer of technology: CCET partnership aimed at commercialization.Overall performance: on time, with all goals met so far.Some utilities have automated this process by placing the information in a fault location geographical Information System (GIS) computer. Since adding transmission line data to the computer can be a large effort, some utilities have further shortened the process by utilizing a transmission structures location database. Several utilities have recently created these databases for transmission inventory using GPS location technology and handheld computers.
The inventory database probably contains more information than needed for a fault location system, and a reduced version would save the large data-collection effort. Using this data, the power system operator could provide field personnel direct location information.
Field personnel could use online information to help them avoid spending valuable time looking for maps and drawings and possibly even reduce their travel time. With precise information available, crews can prepare for the geography, climatic conditions, and means of transport to the faulted location. Repair time and resources would be optimized by the collected data before departure. Accurate fault location can also aid in fast restoration of power, particularly on transmission lines with distributed loads. Power system operators can identify and isolate faulted sections on taploaded lines and remove them by opening circuit breakers or switches remotely along the line, restoring power to the tap loads serviced by the unfaulted transmission sections.
ISSN 2230-7656 (c) MIT Publications
MIT International Journal of Electrical and Instrumentation Engineering Vol. 3, No. 1, Jan. 2013, pp. 33–39 39
REFERENCES
[1] Electric power transmission system engineering: analysis and design, By TuranGonen, Edition: illustrated, Published by J. Wiley, 1988, Original from the University of Michigan, Digitized Dec. 15, 2006.
[2] Electric power systems. By Birron Mathew Weedy, Edition: 2, illustrated, Published by J. Wiley, 1972, Original from the University of California, Digitized 10 Oct, 2008.
[3] Global Positioning System, By Institute of Navigation, Published by Inst of Navigation, 1980.
[4] Introduction to GPS: the Global Positioning System, By Ahmed
El-Rabbany, Edition: illustrated, Published by Artech House, 2002.
[5] Protective Relaying: Principles and Applications, By J. Lewis Blackburn, Edition: 2, illustrated, revised, Published by CRC Press, 1997.
[6] Communication and Control in Electric Power Systems: Applications of Parallel and Distributed Processing, By M. Shahidehpour, Yaoyu Wang, Institute of Electrical and Electronics Engineers, Edition: illustrated, Published by Wiley-IEEE, 2003.
[7] www.autherstream.com[8] www.jamiamilliaislamia.com
ISSN 2230-7656 (c) MIT Publications