mit2 72s09 lec09
TRANSCRIPT

MIT OpenCourseWare http://ocw.mit.edu
2.72 Elements of Mechanical Design Spring 2009
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.

2.72 Elements of
Mechanical Design
Lecture 09: Alignment

Schedule and reading assignment Quiz
� Thursday: Hale 6.1
� Soon: Bolted joint qualifying quiz
Topics � Lab notebooks � Alignment methods � Kinematic coupling grade bump = ½ grade for use/design
Reading assignment • Read: 8.2 • Examples: All in 8.2
© Martin Culpepper, All rights reserved 2

Lab notebooks Technical quality/quantity
� Appropriate equations, codes � Units � Important results highlighted/boxed/noted/explained
Graphical quality/quantity � Appropriate sketches/pictures
� Pasted CAD/etc…
Archival quality � Can this be copied?
� Understood by others?
Best practices � Dating and number of pages
� Permanent pen
� No blank spaces (X out)
© Martin Culpepper, All rights reserved 3

Ideal alignment interface Repeatable
Accuracy
Stiffness (sensitive?)
Load capacity
“Perfect” constraint
Lowest energy state
6 DOF
Metal molds
High natural frequency
© Martin Culpepper, All rights reserved 4

Common alignment methods
Elastic averagElastic averagiingng Compliant kinCompliant kineematicmatic QuasiQuasi--kinematickinematic Active kinematicActive kinematic Passive kinematicPassive kinematic
AccuracyAccuracy RepeatabilityRepeatability Accuracy & repeatabilityAccuracy & repeatability
Desired Position
Elastic BElastic B
Passive KCPassive KC Active KCActive KC
Elastic CElastic CElastic AElastic A
QuasiQuasi--KCKC
ErrorErrorErrorError
© Martin Culpepper, All rights reserved 5
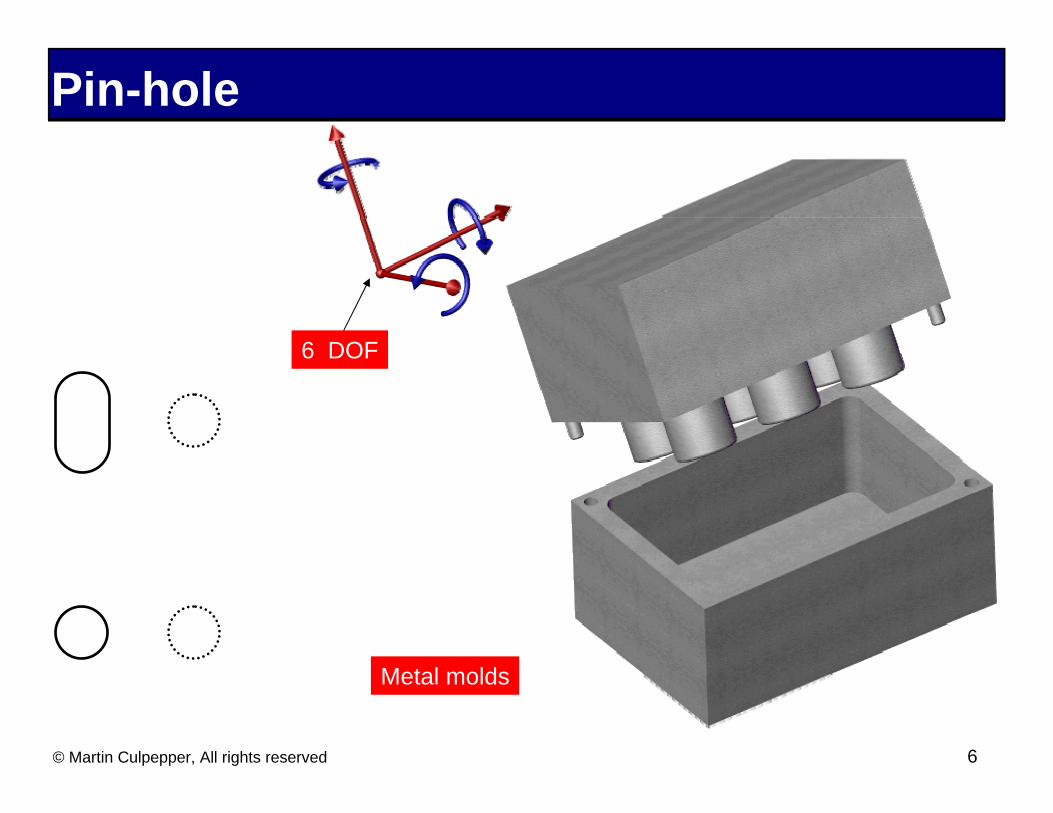
Pin-hole
6 DOF
Metal molds
© Martin Culpepper, All rights reserved 6
3 – 2 – 1 Alignment schemes
© Martin Culpepper, All rights reserved 7

Exact constraint couplings Exact constraint (EC):
� Constraints = DOF to be constrained � Deterministic saves $ � Balls (inexpensive) & grooves (more difficult to make)
In KC design the issues are:� KNOW what is happening in the system (coupling) � MANAGE forces, deflections, stresses and friction
There are many types of EC couplings, our time limits us to a semi-focused study on kinematic couplings
Balls
Tetrahedral groove
Maxwell V groove Kelvin
© Martin Culpepper, All rights reserved 8

Passive kinematic couplings Fabricate and forget
¼ micrometer with best practices, 10s of nm recently
What is important?� Contact forces � Contact stress � Stiffness vs. geometry � Stiffness vs. preload � Friction & settling � Thermal loading � Preload repeatability
Preload (nesting load) is the force applied to keep the coupling components engaged and prevent tipping
Preload
© Martin Culpepper, All rights reserved 9

Ball motions: Displacements
iABall
iABall ee
n iABalln n
ER
F _
_
31
2
2
__ ˆ 16
9 ⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅ ⋅−=Σδ
v iBBall
iBBall ee
n iBBalln n
ER
F _
_
31
2
2
__ ˆ 16
9 ⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅ ⋅−=Σδ
v
Hertz 1857-1894 vvv
ΣδBall _ i = δBall _ iA +δBall _ iB
This assumes that the ball-ball stiffness is > ~10x ball-groove stiffness
Ball far-field point
B1
B3
B2
A B
iABall _ δ v
iBBall _ δ v
iBall _ δ v
Groove far-field points© Martin Culpepper, All rights reserved 10

Load balance: Force and moment Preload
Force balance (3 equations)Error
Contact
ΣF v
relative = 0 = ( preloadFv
+ ErrorFv )+ (
Moment balance (3 equations) M r
relative = ( iBalli M _ 1 6
r = )Σ + ( preloadM
r )+ ( errorM r )= ( preloadpreload Fr
vv × + Errorerror Fr vv × )+ Σ iBalliBall Fr __
vv ×
Goal: 1. Solve 6 equations for contact forces 2. Solve normal displacements 3. Solve relative displacements/rotations
Ball far-field point
Given geometry, materials,preload force, error force,solve for local distance of approach
A B
Groove far-field points
)6_5_4_3_2_1_ BallBallBallBallBallBall FFFFFF vvvvvv
+++++
© Martin Culpepper, All rights reserved 11

Modeling round interfaces Equivalent radius 1R = e 1 1 1 1
+ + +R1major R1min or R2major R2min or
Equivalent modulus 1Ee = 2 2 Poisson’s ratio1−η1 1−η2+
E1 E2
Young’s modulus
1
⎛ 9 F 2 ⎞ 3nδ = ⎜ ⋅ ⎟ n ⎜
⎝16 Re ⋅Ee 2 ⎟⎠
Important scaling law
Scaling with Mat’l properties and geometry
Contact stiffness
0
05
10
20
30
0 250 500 750 1000 Fn [N]
k [N
/mic
ron]
Preload should be repeatable in magnitude & direction
Degree of nonlinearity is reduced as preload is increased
3 ⋅E 3 3k δ = 2 ⋅R ⋅E ⋅δ( ) ( 0.5 ) 0.5 k ( )F = Constant ⋅ (R 1 2 )⋅F
1
n n e e n n n e e n
© Martin Culpepper, All rights reserved 12
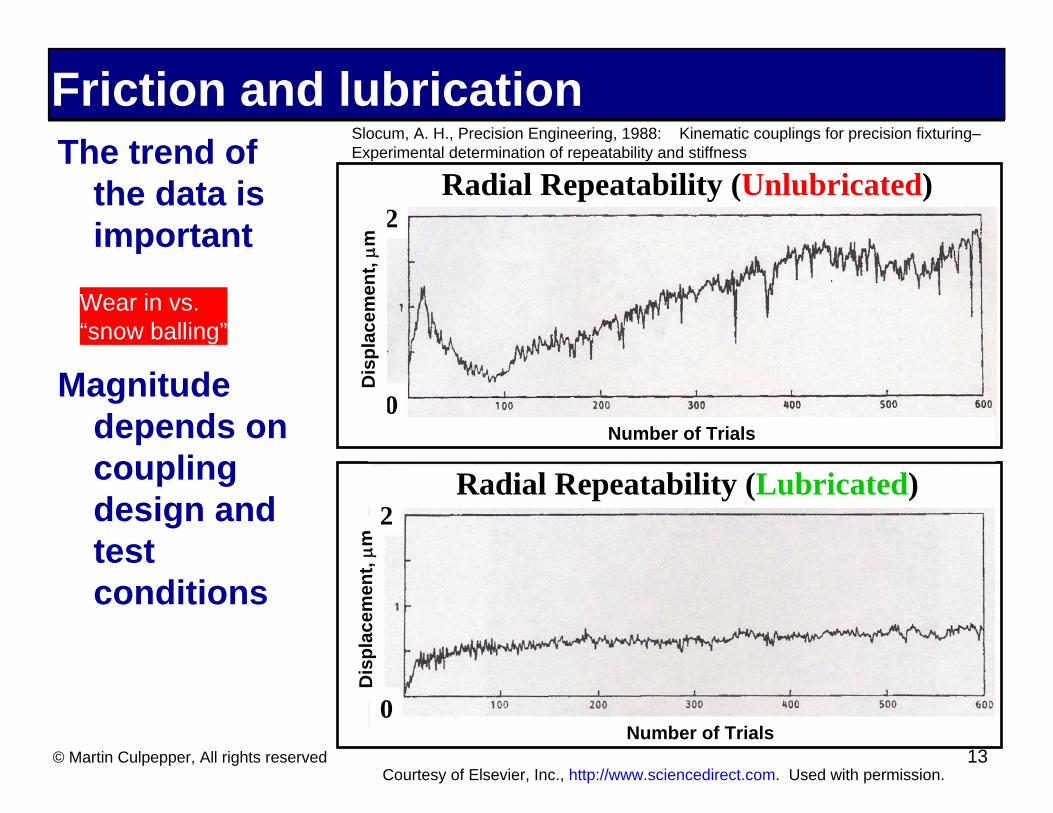
Friction and lubrication The trend of
the data is important
Wear in vs. “snow balling”
Magnitude depends on coupling design and test conditions
Slocum, A. H., Precision Engineering, 1988: Kinematic couplings for precision fixturing– Experimental determination of repeatability and stiffness
Number of Trials
Radial Repeatability (Unlubricated) 2
0 D
ispl
acem
ent, μm
Radial Repeatability (Lubricated)
Dis
plac
emen
t, μm
2
0 Number of Trials
© Martin Culpepper, All rights reserved Courtesy of Elsevier, Inc., http://www.sciencedirect.com. Used with permission.
13