model reduction of flow systems and networks by the ... · robert k. niven unsw canberra, act,...
TRANSCRIPT

Model Reduction of Flow Systems and
Networks by the Maximum Entropy Method
Model Reduction Across Disciplines, University of Leicester, UK, 20 August 2014
Robert K. Niven
UNSW Canberra, ACT, AustraliaInstitut PPrime, Poitiers, France
⎧⎨⎩
Bernd R. Noack Institut PPrime, Poitiers, France.
Marcus Abel Ambrosys GmbH / Univ. of Potsdam, Germany
Michael Schlegel T.U. Berlin, Germany
Steven H. Waldrip UNSW Canberra, ACT, Australia
Eurika Kaiser Institut PPrime, Poitiers, France
Funding from ARC, Go8/DAAD, CNRS, Region Poitou-Charentes

© R.K. Niven 4
Contents 1. MaxEnt analysis - justification + mathematical structure
2. MaxEnt in fluid mechanics - infinitesimal fluid element
3. MaxEnt in dynamical systems - oscillatory cylinder wake
4. MaxEnt analyses of flow networks - “standard” problem: flow rates + potentials - e.g. pipe flow system (nonlinear) - real example - “extended” problem: other uncertainties - chemical reaction networks
5. Conclusions

© R.K. Niven 5
Systems Analysis

© R.K. Niven 6
Probabilistic Systems Consider any system of discrete entities:
MaxEnt method (Jaynes, 1957, 1963, 2003)
- maximise entropy, subject to constraints → “least informative” description of system
MaxProb principle (Boltzmann, 1877; Planck, 1901) - maximise probability (⇒ entropy), subject to constraints → most probable state of system
e.g. atoms / molecules / ions, oscillators, quantum particles, fluid elements, motor vehicles, organisms, economic agents, social actors, humans, entire systems

© R.K. Niven 7
Boltzmann Principle (“MaxProb”)
H = lnP
N
P=N! qi
ni
ni !i=1
s∏
N→∞, ni /N→pi⎯ →⎯⎯⎯⎯⎯⎯⎯
H = − pi ln
piqii=1
s∑
Also pi→p(x)dx qi→q(x)dx
⎯ →⎯⎯⎯⎯⎯⎯⎯
H = − dx
−∞
∞
∫ p(x)ln p(x)q(x)
≡ Large Deviations theory (Ellis 1985) ≡ Method of Types (Csiszár, 1998)
{n.b. if P ≠ multinomial → different entropy function}

© R.K. Niven 8
Boltzmann Principle / MaxEnt / 2nd Law (Boltzmann, 1877; Planck, 1901 ↔ Jaynes 1957)
Weak Form “A system can be represented by its most probable state” → probabilistic inference - does not require asymptotic limit - does not give certainty Strong Form “A system tends towards its most probable state” - not just thermodynamics!
Inference
Ergodicity

© R.K. Niven 9
Contention: - identify MaxEnt / MaxProb solution with stationary state ⇒ dramatic simplification (model reduction) - old / new thermodynamics - fluid flow + non-equilibrium systems - other systems
Caveats: - probabilistic, not deterministic (this is inference !) - only infers the stationary state - discards the (unnecessary) dynamics

© R.K. Niven 10
Jaynes’ Mathematical Structure

© R.K. Niven 11
Jaynes’ MaxEnt Define probability pi over uncertainties i →
Maximise H = − pi ln
piqii=1
s∑ relative entropy
subject to
pii=1s∑ = 1 normalisation constraint
pii=1s∑ fri = ⟨fr ⟩, r = 1,...,R moment constraints
Write Lagrangian, extremise →
pi
* =qiZ
e− λr frir=1R∑ Boltzmann distribution
H* = lnZ + λr ⟨fr ⟩
r =1
R∑ maximum relative entropy
where λr = Lagrangian multipliers; Z = partition function

© R.K. Niven 12
Thermodynamic System (2 competing constraints) e.g.
pijj∑i∑ = 1 normalisation
pijεij∑i∑ = U mean energy
pijVjj∑i∑ = V mean volume
MaxEnt →
pij
* =qijZ
e−λEεi −λVVj
H* = lnZ + λE U + λV V
Identify S = kH* , λE = 1/ kT , λV = P / kT →
pij
* =qijZ
e−(εi +PVj )/kT
with qij ∝ degeneracy
S = k lnZ + U
T+ P V
T
© R.K. Niven 13
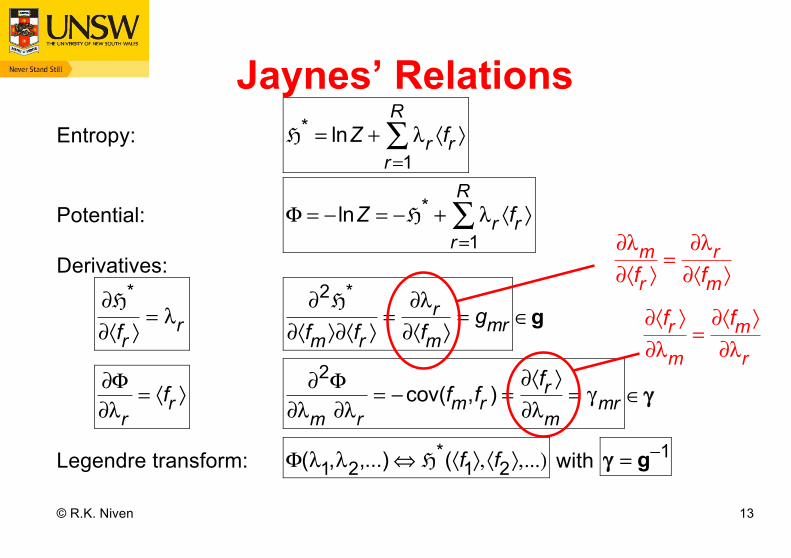
Jaynes’ Relations Entropy:
H* = lnZ + λr ⟨fr ⟩
r=1
R∑
Potential: Φ = − lnZ = −H* + λr ⟨fr ⟩
r=1
R∑
Derivatives:
∂H*
∂⟨fr ⟩= λr
∂2H*
∂⟨fm ⟩∂⟨fr ⟩=
∂λr∂⟨fm ⟩
= gmr ∈g
∂Φ∂λr
= ⟨fr ⟩
∂2Φ∂λm ∂λr
= −cov(fm,fr ) =∂⟨fr ⟩∂λm
= γmr ∈γγ
Legendre transform: Φ(λ1,λ2,...) ⇔ H*(⟨f1⟩,⟨f2⟩,...) with γ = g−1
∂⟨fr ⟩∂λm
=∂⟨fm ⟩∂λr
∂λm∂⟨fr ⟩
=∂λr∂⟨fm ⟩

© R.K. Niven 14
Thermodynamic System (c.f. Callen, 1985)
Entropy: S = k lnZ + U
T+ P V
T
Potential: kΦ = −k lnZ = −S + U
T+ P V
T= G
T Planck potential
i.e. G = kTΦ = −kT lnZ = −TS + U + P V Gibbs free energy
Derivatives:
∂S∂⟨U⟩
, ∂S∂⟨V ⟩
⎡⎣⎢
⎤⎦⎥= 1
T,PT
⎡⎣⎢
⎤⎦⎥
,
∂(G /T )∂(1/T )
,∂(G /T )∂(P /T )
⎡⎣⎢
⎤⎦⎥= ⟨U⟩,⟨V ⟩[ ]
Legendre transform:
GT
1T
,PT
⎛⎝⎜
⎞⎠⎟ ⇔ S(⟨U⟩,⟨V ⟩)
∂2(G /T )
∂(1/T )2∂2(G /T )
∂(1/T )∂(P /T )
∂2(G /T )∂(1/T )∂(P /T )
∂2(G /T )
∂(P /T )2
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
∂⟨U⟩∂(1/T )
∂⟨U⟩∂(P /T )
∂⟨V ⟩∂(1/T )
∂⟨V ⟩∂(P /T )
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
CV = ∂⟨U⟩∂T
α = − 1⟨V ⟩
∂⟨V ⟩∂P
β = 1⟨V ⟩
∂⟨V ⟩∂T
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪⎪

© R.K. Niven 15
Interpretation of Φ System + Environment
dHuniv = dHsys* + dHext
= dHsys* − d λr ⟨fr ⟩
r=1
R∑ = −dΦ
Identify Φ = generalised Planck potential (~ free energy / T)
Isolated system: no change in {λr } or {⟨fr ⟩} → max H
Open system: can change {λr } or {⟨fr ⟩} → max Huniv = min Φ
dς = diff. generalised entropy produced

© R.K. Niven 16
Thermodynamic System Change in potential:
kdΦ = d G
T= −dS * + d U
T+ d P V
T
hence
min Φ →
↑S, ↑ σ↓S, ↑ σ↑S, ↓ σ
⎧
⎨⎪
⎩⎪
driven by ΔΦ = ΔG
T≤ 0
Accounts for internal + external changes in entropy Chemical thermodynamics → model reduction of ~23 orders of magnitude !
d H
T= −dσ = entropy produced
© R.K. Niven 17
MaxEnt in Fluid Mechanics

© R.K. Niven 18
Flow Systems Eulerian description: consider motion of fluid
volume through control volume
Control volume analysis of S
→ thermodynamic entropy production
diSdt
Global:
σ = ∂
∂tρsdV
CV∫∫∫ + ρsv + js( ) indA
CS∫∫
Local: σ̂ = ∂
∂tρs + ∇ i ρsv + js( ) with
σ = σ̂dV
CV∫∫∫
de Groot & Mazur (1984) → σ̂ = jr iFr
r∑
js = jrλr
r∑
with jr ∈ jQ, jc ,τ,ξd{ } ,
Fr ∈ ∇ 1
T,−∇
μcT
,− ∇vT
,−ΔGdT
⎧⎨⎩
⎫⎬⎭
, λr ∈ 1
T,−
μcT
⎧⎨⎩
⎫⎬⎭
© R.K. Niven 19
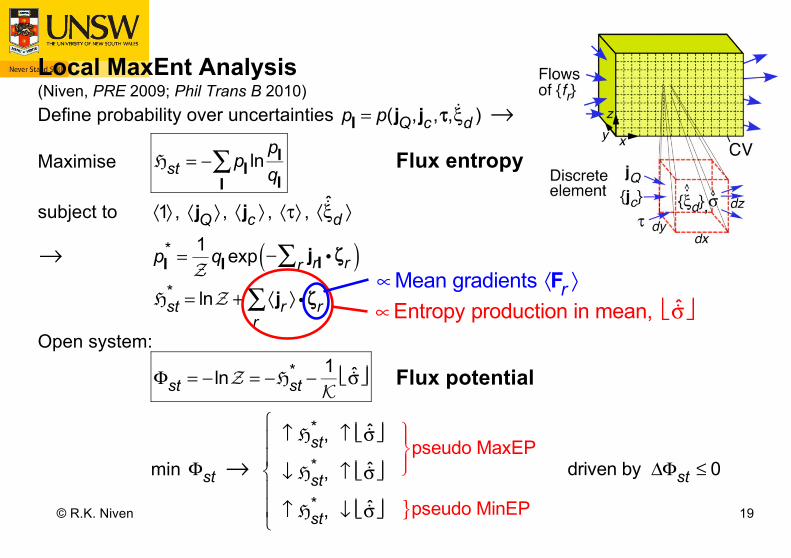
Local MaxEnt Analysis (Niven, PRE 2009; Phil Trans B 2010)
Define probability over uncertainties pI = p(jQ, jc ,τ,ξd ) →
Maximise Hst = − pI ln
pIqII
∑ Flux entropy
subject to ⟨1⟩ , ⟨jQ ⟩ , ⟨jc ⟩ , ⟨τ⟩ , ⟨ξ̂d ⟩
→ pI
* = 1Z
qI exp − jrI i ζrr∑( )
Hst
* = lnZ + ⟨jr ⟩ i ζrr∑
Open system:
Φst = − lnZ = −Hst
* − 1K
σ̂⎢⎣ ⎥⎦ Flux potential
min Φst → driven by ΔΦst ≤ 0
↑ Hst* , ↑ σ̂⎢⎣ ⎥⎦
↓ Hst* , ↑ σ̂⎢⎣ ⎥⎦
↑ Hst* , ↓ σ̂⎢⎣ ⎥⎦
⎧
⎨
⎪⎪
⎩
⎪⎪
⎫⎬⎪
⎭⎪pseudo MaxEP
}pseudo MinEP
∝Entropy production in mean, σ̂⎢⎣ ⎥⎦ ∝Mean gradients ⟨Fr ⟩

© R.K. Niven 20
Summary: MaxEnt analysis of local flow system → 1. “Minimum flux potential” principle:
Φst= −Hst
* − 1K
σ̂⎢⎣ ⎥⎦
2. Connected to subsidiary MaxEP or MinEP principles (analogous to min or max enthalpy principles)
EP in the mean

© R.K. Niven 21
MaxEnt and Dynamical Systems
© R.K. Niven 22
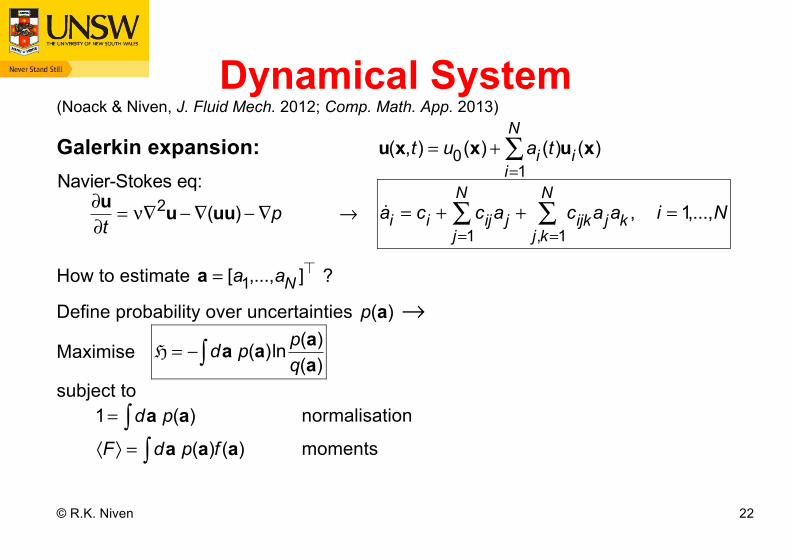
Dynamical System (Noack & Niven, J. Fluid Mech. 2012; Comp. Math. App. 2013)
Galerkin expansion: u(x,t) = u0(x) + ai (t)ui (x)
i=1
N∑
∂u∂t
= ν∇2u− ∇(uu) − ∇p → ai = ci + cijaj
j=1
N∑ + cijkajak
j,k=1
N∑ , i = 1,...,N
How to estimate a = [a1,...,aN ] ?
Define probability over uncertainties p(a) →
Maximise H = − da p(a)ln p(a)
q(a)∫
subject to 1= da p(a)∫ normalisation
⟨F⟩ = da p(a)f (a)∫ moments
Navier-Stokes eq:
© R.K. Niven 23
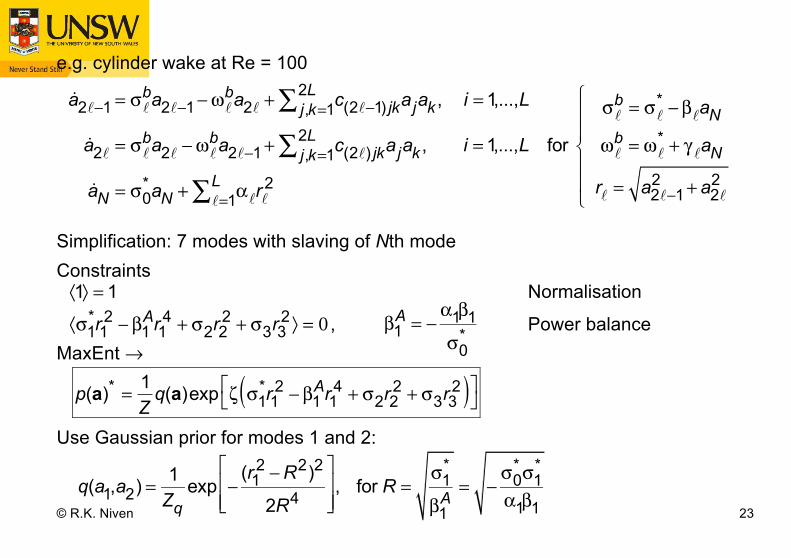
e.g. cylinder wake at Re = 100
a2 −1 = σba2 −1− ωba2 + c(2 −1) jkajakj,k=1
2L∑ , i = 1,...,L
a2 = σba2 − ωba2 −1+ c(2 ) jkajakj,k=12L∑ , i = 1,...,L
aN = σ0* aN + α r 2
=1L∑
for
σb = σ* − β aN
ωb = ω* + γ aN
r = a2 −12 + a2
2
⎧
⎨
⎪⎪
⎩
⎪⎪
Simplification: 7 modes with slaving of Nth mode Constraints ⟨1⟩ = 1 Normalisation
⟨σ1*r1
2 − β1Ar1
4 + σ2r22 + σ3r3
2 ⟩ = 0 , Power balance MaxEnt →
p(a)* = 1
Zq(a)exp ζ σ1
*r12 − β1
Ar14 + σ2r2
2 + σ3r32( )⎡
⎣⎤⎦
Use Gaussian prior for modes 1 and 2:
q(a1,a2) = 1
Zqexp −
(r12 −R2)2
2R4
⎡
⎣⎢⎢
⎤
⎦⎥⎥, for R =
σ1*
β1A
= −σ0
*σ1*
α1β1
β1
A = −α1β1σ0
*

© R.K. Niven 24
Summary: apply MaxEnt → closely match DNS solution → system closure ! Current work: - examine higher dimensionality systems (→ turbulence!)

© R.K. Niven 25
MaxEnt Analysis of Flow Networks

© R.K. Niven 26
Flow Network Consider generalised flow network, with nodes connected by flow paths:
Many applications ! - electrical, fluid flow, communications networks - transport (road, air, shipping), chemical reaction, ecological networks - human industrial, economic, social, political networks

© R.K. Niven 27
Network Specification Network structure
- N nodes, M edges - adjacency matrix A
Flow parameters - internal flow rates
Qij ∈Q (edges)
- external flow rates θi ∈ΘΘ (nodes) - potential differences
ΔEij ∈ΔE (edges) (for Δ = init − final )
Kirchhoff’s Laws
Ki ∈K : Continuity at each node i: θi − Qij
i=1
N∑ = 0
K ∈L : No potential difference around each loop :
ΔEijij∈∑ = 0
⎫⎬⎭⇒ L loops

© R.K. Niven 28
Resistance Functions Specify
ΔEij = Rij (Qij ) ∈ ΔE = R (Q )
e.g.
Electrical: linear: ΔE = RQ c.f. V = RI
Pipe flows: quadratic: ΔE = RQ2
power law: ΔE = RQ |Q |a−1 a ∈[0,1]
Colebrook:
ΔE = 8fL
π2D5gQ |Q | with
Re = 4ρQ
πμD and
f = 64|Re|
, Re < 2100
1f= 1.14 − 2.0 log10
εD
+ 9.28|Re | f
⎛⎝⎜
⎞⎠⎟, Re ≥ 4000
⎧
⎨
⎪⎪
⎩
⎪⎪
Transport: ΔE = R(Q) with ΔE →∞ as Q →Qmax
© R.K. Niven 29
Deterministic Method e.g. electrical circuit analysis; hydraulic engineering: - parameters {Q,Θ,ΔE } ; equations {K ,L,R } - specify sufficient parameters → solve directly (e.g. Hardy-Cross
method) - solution sometimes ⇔ min. or max. power

© R.K. Niven 30
Previous Use of MaxEnt (a) Transport networks e.g. Ortúzar & Willumsen (2001): “gravity model”:
- define over trip counts Tij
→ max
H = − (Tij logTij −Tij )
ij∑
subject to Kirchhoff node constraints + cost function - use multiplier as fitting parameter
(b) Hydraulic networks e.g. Awumah et al. 1990; Tanyimboh & Templeman 1993; de Schaetzen et al. 2000; Formiga
et al. 2003, Ang & Jowitt 2003; Setiadi et al. 2005
- define probabilities
pij = Qij Qij
ij∑
→ MaxEnt subject to Kirchhoff node constraints - did not include Kirchhoff loop constraints or pipe resistances!

© R.K. Niven 31
“Standard Problem” Define probability over uncertainties → joint pdf p(Q ,Θ,ΔE )
→ maximise
Hnet = − ...∫ dQ dΘdΔE p(Q ,Θ,ΔE ) ln p(Q ,Θ,ΔE )
q(Q ,Θ,ΔE )∫
Constraints: - normalisation ⟨1⟩ - known moments: some of
⟨Qij ⟩ , ⟨θi ⟩ ,
⟨ΔEij ⟩ - resistance functions ⟨ΔE ⟩ −R (⟨Q ⟩) = 0 - Kirchhoff node + loop constraints f(⟨Q ⟩,⟨ΘΘ⟩) = 0, g(⟨ΔE ⟩) = 0
→ Boltzmann distribution, MaxEnt:
p* = qZ
exp −λλ :Q − μ iΘ − νν : ΔE − ρρ : ⟨ΔE ⟩ −R (⟨Q ⟩)( )− αα i f − ββ i g⎡⎣ ⎤⎦
Hnet* = − lnZ + λ : ⟨Q ⟩ + μ i ⟨ΘΘ⟩ + ν : ⟨ΔE ⟩
Entropy production σnet⎢⎣ ⎥⎦
Non-linearities!

© R.K. Niven 32
Comments 1. Kirchhoff constraints imposed in mean:
θi − Qij
i=1
N∑ = 0 , all nodes;
ΔEijij∈∑ = 0 , all indep. loops
2. Handling of resistance functions: I.
⟨ΔEij ⟩ = ⟨Rij (Qij )⟩ → simple Lagrangian
II. ⟨ΔEij ⟩ = Rij (⟨Qij ⟩) → implicit Lagrangian
3. Dimensionality of integrals
...∫ dQ dΘdΔE ...∫ R (Q )⎯ →⎯⎯⎯ ...∫ dQ dΘ...∫
4. Prior probabilities - Gaussian priors convenient

© R.K. Niven 33
Results 3-node network (Waldrip et al., MaxEnt2013) - 6 parameters (
⟨ΔEij ⟩ dependent)
- 3 x Ki + 1 x K - power-law resistances:
⟨ΔEij ⟩ = Kij ⟨Qij ⟩ | ⟨Qij ⟩ |
- Gaussian priors Solved numerically (multidimensional quadrature, quasi-Newton iteration for multipliers, outer implicit iteration)
Constraints ⟨θ1⟩ = 1, ⟨θ2⟩ = 0; fixed K12 = K23 = 0.5
Constraints ⟨θ1⟩ = 1; fixed K12 = K23 = 0.5
© R.K. Niven 36
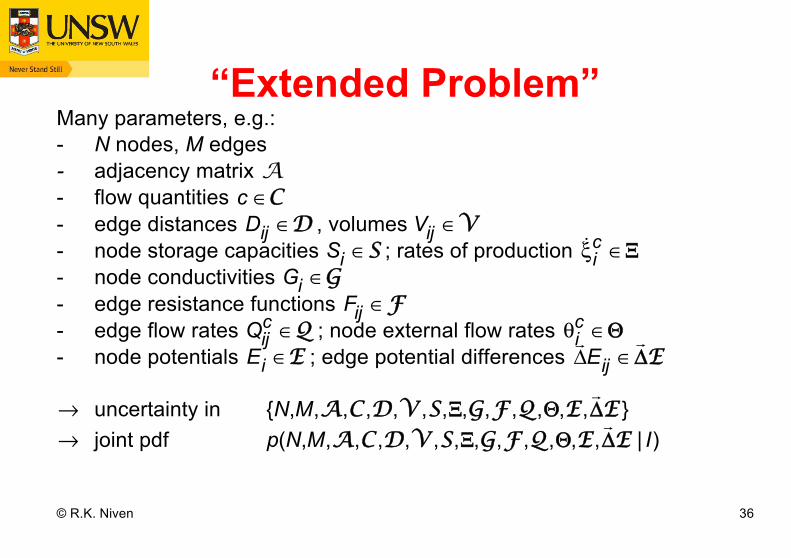
“Extended Problem” Many parameters, e.g.: - N nodes, M edges - adjacency matrix A - flow quantities c ∈C - edge distances
Dij ∈D , volumes
Vij ∈V
- node storage capacities Si ∈S ; rates of production ξic ∈ΞΞ
- node conductivities Gi ∈G - edge resistance functions
Fij ∈F
- edge flow rates Qij
c ∈Q ; node external flow rates θic ∈ΘΘ
- node potentials Ei ∈E ; edge potential differences ΔEij ∈ΔE
→ uncertainty in {N,M,A,C ,D,V ,S,Ξ,G,F ,Q ,Θ,E ,ΔE } → joint pdf p(N,M,A,C ,D,V ,S,Ξ,G,F ,Q ,Θ,E ,ΔE | I)

© R.K. Niven 37
Define probability over the uncertainties → relative entropy
Hnet = − ...∫ dX p(X | I) ln p(X | I)
q(X | I)∫ X = uncertain parameter(s)I = known information
Maximise subject to constraints → infer p(X | I) * → moments ⟨Xij ⟩
Open systems: minimise potential
Φnet = −Hnet
* − 1K
σnet⎢⎣ ⎥⎦

© R.K. Niven 38
Chemical Reaction Networks Species
X =
PQAP *QA
P+QA−
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
=XYZ
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
Reactions
Π = L+ L− D+ D− B1
+ B1− B2
+ B2−⎡
⎣⎤⎦
Stoichiometric matrix:
Γ =-1 1 1 -1 0 0 1 -11 -1 -1 1 -1 1 0 00 0 0 0 1 -1 -1 1
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
(e.g. Juretic & Županovic, 2003)
© R.K. Niven 39
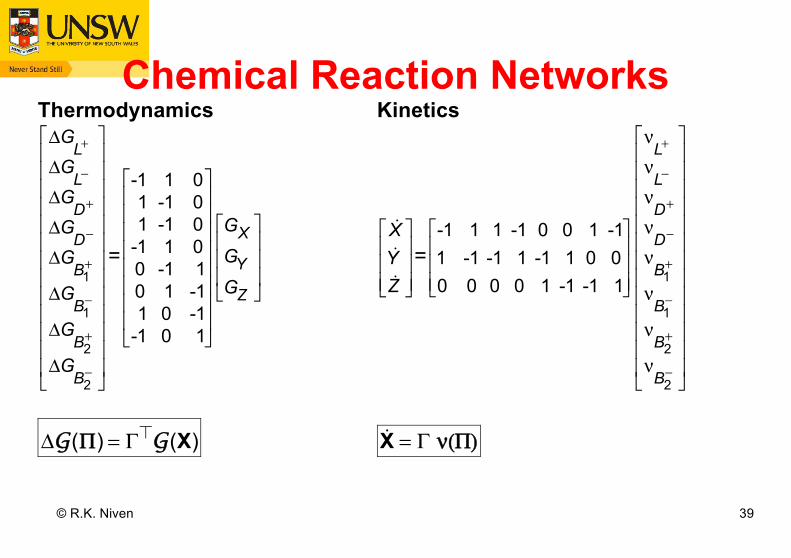
Chemical Reaction Networks Thermodynamics Kinetics
ΔGL+
ΔGL−
ΔGD+
ΔGD−
ΔGB1+
ΔGB1−
ΔGB2+
ΔGB2−
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
=
-1 1 01 -1 01 -1 0
-1 1 00 -1 10 1 -11 0 -1
-1 0 1
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
GXGYGZ
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
XYZ
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥=
-1 1 1 -1 0 0 1 -11 -1 -1 1 -1 1 0 00 0 0 0 1 -1 -1 1
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
νL+
νL−
νD+
νD−
νB1+
νB1−
νB2+
νB2−
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
ΔG(Π) = Γ G(X) X = Γ ν(Π)

© R.K. Niven 40
Graph Structures
Nodes = species Nodes = reactions Famili & Palsson (2003)

© R.K. Niven 43
Conclusions

© R.K. Niven 44
Conclusions 1. MaxEnt analysis
- justification; mathematical structure
2. MaxEnt in fluid mechanics- infinitesimal fluid element
3. MaxEnt in dynamical systems- oscillatory cylinder wake
4. MaxEnt analyses of flow networks- “standard” problem: flow rates + potentials
- e.g. pipe flow system (nonlinear) - real example
- “extended” problem: further uncertainties - incl. network structure - chemical reaction networks → stationary states

© R.K. Niven 45
Thank you !
(Advertisement: now recruiting for postdoc / PhD students)