modelamiento del chasís de un kart eléctrico como un
TRANSCRIPT
Facultad de Ingeniería
Departamento de Ingeniería Mecánica
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del
software MSC Adams
JUAN FELIPE ROA MELO
Asesor del proyecto de grado
ANDRÉS LEONARDO GONZÁLEZ MANCERA
PhD, MsC, Ingeniero Mecánico
Bogotá, mayo de 2019

2
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Contenido
1. MODELO CHASÍS DE UN KART ELÉCTRICO ................................................................................. 7
1.1. Introducción ........................................................................................................................................ 7
1.2. Motivación ............................................................................................................................................ 7
1.3. Objetivo General ................................................................................................................................ 8
1.4. Objetivos Específicos ......................................................................................................................... 8
2. KART ELÉCTRICO .................................................................................................................................... 9
2.1. Historia ................................................................................................................................................. 9
2.2. Chasís .................................................................................................................................................. 10
2.3. Especificaciones Generales Kart BTA Racing ............................................................................. 11
2.3.1. Sistema de Potencia ................................................................................................................. 11
2.3.2. Sistema de Movimiento ........................................................................................................... 12
2.3.3. Sistema de Estructura .............................................................................................................. 14
2.3.4. Sistema de protección ............................................................................................................. 15
3. MODELAMIENTO DEL CHASÍS DE UN KART (TRABAJOS PREVIOS)................................... 16
3.1. Trabajos previos externos a BTA Racing .................................................................................... 16
3.2. Trabajo previo relacionado con BTA Racing ............................................................................. 21
4. MSC ADAMS ............................................................................................................................................. 23
4.1. MSC Adams View ............................................................................................................................. 23
4.2. MSC Adams ViewFlex ..................................................................................................................... 25
4.3. MSC Adams Flex ............................................................................................................................... 25
4.4. MSC FE – Part ................................................................................................................................... 27
4.5. MSC Discrete Flexible Links .......................................................................................................... 29
5. ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS ................................. 31
5.1. Uso de Adams ViewFlex con CAD de Autodesk Inventor .................................................... 31

3 Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa
MSC Adams
5.2. Uso de Adams Flex .......................................................................................................................... 33
5.3. Modelamiento del chasis con MSC FE – Part ............................................................................. 33
5.4. Selección de complemento de Adams ......................................................................................... 39
6. DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA................................... 40
6.1. Geometría de la sección transversal del chasís ......................................................................... 40
6.2. Metodología de cargas estáticas .................................................................................................... 45
6.3. Metodología de cargas dinámicas .................................................................................................. 47
7. MODELAMIENTO DEL CHASÍS EN MSC ADAMS ........................................................................ 51
7.1. Uniones ............................................................................................................................................... 51
7.2. Análisis de convergencia ................................................................................................................. 54
8. RESULTADOS ........................................................................................................................................... 58
9. CONCLUSIÓN ......................................................................................................................................... 65
10. TRABAJO FUTURO ............................................................................................................................ 66
11. REFERENCIAS ....................................................................................................................................... 67

4
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustraciones
Ilustración 1. Prototipo de kart eléctrico desarrollado en la Universidad de los Andes. ............................................ 9
Ilustración 2. Modelo CAD del chasís construido en la Universidad de los Andes. .................................................... 11
Ilustración 3. Subsistema de dirección del kart, las barras de color rojo son las partes que componen la dirección
[5]. .................................................................................................................................................................................................... 12
Ilustración 4. Análisis de desplazamiento con carga de 1.5g [7]. ..................................................................................... 16
Ilustración 5. Posicionamiento de prueba de validación de modelo [9]. ........................................................................ 18
Ilustración 6. Sólido final sometido a prueba de paso por curva [10]. ............................................................................ 19
Ilustración 7. Valores de aceleraciones de un kart en un circuito específico [10]. ...................................................... 19
Ilustración 8. Modelo final - simulación cargas estáticas [6]. ............................................................................................. 21
Ilustración 9. Interfaz gráfica Adams View. ............................................................................................................................ 23
Ilustración 10. Acceso a Adams ViewFlex.............................................................................................................................. 25
Ilustración 11. Acceso a Adams Flex por medio de Adams View. ................................................................................... 26
Ilustración 12. Menú de Adams Flex: crear un cuerpo flexible. ........................................................................................ 26
Ilustración 13. Herramienta para crear una FE - Part. ........................................................................................................ 27
Ilustración 14. Asignación de material y rigidez de la nueva FE - Part. ........................................................................... 28
Ilustración 15. Selección de puntos entre los cuales se creará la parte. ........................................................................ 28
Ilustración 16. Menú de nodos y ángulos entre la posición inicial y final. Creación de nueva geometría de la sección
transversal de la FE - Part. ......................................................................................................................................................... 28
Ilustración 17. Herramienta para crear Discrete Flexible Links. ...................................................................................... 29
Ilustración 18. Selección de material. ...................................................................................................................................... 30
Ilustración 19. Selección de markers entre los que se posicionará el nuevo sólido. ................................................... 30
Ilustración 20. Menú bienvenida Adams View. ...................................................................................................................... 31
Ilustración 21. Menú de archivos. ............................................................................................................................................. 31
Ilustración 22. Archivo importado de archivo CAD de Autodesk Inventor. ................................................................ 32
Ilustración 23. Menú de conversión de parte rígida a flexible por medio de Adams ViewFlex. ............................... 32
Ilustración 24. Herramienta de unión de dos sólidos. ........................................................................................................ 33
Ilustración 25. Error al convertir el CAD a una malla flexible por medio de Adams ViewFlex. .............................. 33
Ilustración 26. Herramienta de creación de Marker. ........................................................................................................... 34
Ilustración 27. Menú de creación de marker. ........................................................................................................................ 34
Ilustración 28. Ingreso de coordenadas. ................................................................................................................................. 35
Ilustración 29. Opción de creación de conexión fija. .......................................................................................................... 35
Ilustración 30. Menú de conexión fija. .................................................................................................................................... 35
Ilustración 31. Creación de medición punto a punto. ......................................................................................................... 36

5 MODELO CHASÍS DE UN KART ELÉCTRICO
Ilustración 32. Clic derecho sobre uno de los extremos de la barra. ............................................................................. 36
Ilustración 33. Menú de búsqueda puntos cercanos región de clic. ................................................................................. 36
Ilustración 34. Deflexión en el programa MDSolids. ........................................................................................................... 37
Ilustración 35. Opción de simulación en Adams. ................................................................................................................. 37
Ilustración 36. Panel de control de la simulación. ................................................................................................................ 38
Ilustración 37. Resultados de simulación en MSC Adams View. ...................................................................................... 38
Ilustración 38. Mensaje de advertencia con sección transversal circular hueca. .......................................................... 40
Ilustración 39. Opción de creación de fuerza puntual. ....................................................................................................... 43
Ilustración 40. Menú de creación de fuerza puntual. ........................................................................................................... 43
Ilustración 41. Selección de cuerpo al que se aplicará la fuerza. ...................................................................................... 43
Ilustración 42. Selección de dirección de aplicación de la fuerza. .................................................................................... 43
Ilustración 43. Creación de un nuevo material. .................................................................................................................... 44
Ilustración 44. Menú de creación del nuevo material.......................................................................................................... 44
Ilustración 45. Distribución de los componentes sobre el chasís. ................................................................................... 45
Ilustración 46. Puntos de medición de deflexión con cargas estáticas y extremos fijos a tierra. ............................. 46
Ilustración 47. Aplicación de fuerzas para la medición de la rigidez del chasís. ............................................................ 47
Ilustración 48. Herramienta para crear una unión de rotación. ....................................................................................... 48
Ilustración 49. Menú de unión de rotación. ........................................................................................................................... 48
Ilustración 50. Herramienta de contacto. .............................................................................................................................. 48
Ilustración 51. Modificación de fuerza, ingreso de función. ............................................................................................... 49
Ilustración 52. Creación de función. ........................................................................................................................................ 50
Ilustración 53. Herramienta Create a Bushing. ....................................................................................................................... 52
Ilustración 54. Configuración para la creación de bujes. Es importante escribir las unidades específicas ya que el
programa está configurado en milímetros y no en metros. .............................................................................................. 52
Ilustración 55. Barras unidas (arriba) y barra completa (abajo) modeladas. El símbolo rojo de las barras unidas es
el buje y los símbolos azules en los extremos izquierdos de las barras son uniones fijas simulando que las barras
están empotradas en la pared. .................................................................................................................................................. 52
Ilustración 56. Animación de la simulación de las barras unidas y la completa en el tiempo t = 2 s. .................... 53
Ilustración 57. Puntos de análisis de deflexión. ..................................................................................................................... 54
Ilustración 58. Inserción, eliminación y organización de nodos en una FE – Part. ....................................................... 55
Ilustración 59. Simulación para medir la deflexión y posteriormente la rigidez torsional del chasís. ...................... 60
Ilustración 60. Simulación del impacto sin los extremos fijos a tierra. ........................................................................... 61
Ilustración 61. Giro de chasís luego de prueba de impacto. .............................................................................................. 64

6
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Gráficas
Gráfica 1. Deflexión extremo libre vs Tiempo para comprobación del método densidad y diámetro equivalentes
(𝝆𝒆𝒒 y 𝒅𝒆𝒒, respectivamente. .................................................................................................................................................. 45
Gráfica 2. Deflexión extremo libre vs Tiempo de las barras unidas en comparación con la barra completa teniendo
en cuenta solamente el peso de las barras. ........................................................................................................................... 53
Gráfica 3. Deflexión vs Nodos/m del Punto 1 en el chasís. .............................................................................................. 56
Gráfica 4. Deflexión vs Nodos/m del Punto 2 en el chasís. .............................................................................................. 56
Gráfica 5. Deflexión vs Nodos/m del Punto 3 en el chasís. .............................................................................................. 57
Gráfica 6. Distancia desde el centro de masa del chasís a los respectivos puntos de medición. ............................. 58
Gráfica 7. Fuerza de impacto vs Tiempo. ............................................................................................................................... 61
Gráfica 8. Desplazamiento en el eje z vs Tiempo durante el impacto de los puntos de referencia. ....................... 62
Gráfica 9. Deflexión vs Tiempo durante el impacto (3 llantas fijas). ............................................................................... 63
Gráfica 10. Deflexión vs Tiempo, frecuencia 𝒘 = 𝟑. .......................................................................................................... 63
Tablas
Tabla 1. Comparación de resultados teórico y experimental. .......................................................................................... 18
Tabla 2. Aceleraciones máximas y mínimas de un kart de competición. ........................................................................ 19
Tabla 3. Resultados pruebas de aceleraciones [10]. ............................................................................................................ 20
Tabla 4. Longitud de cada FE - Part utilizada en el modelo del chasís. ........................................................................... 55
Tabla 5. Número de nodos por cada FE - Part. .................................................................................................................... 57
Tabla 6. Deflexiones con cargas estáticas de los puntos analizados en la Ilustración 46. .......................................... 59
7 MODELO CHASÍS DE UN KART ELÉCTRICO
1. MODELO CHASÍS DE UN KART ELÉCTRICO
1.1. Introducción
El chasís es la estructura base de cualquier vehículo. Este es el que soporta todos los sistemas
y subsistemas necesarios para el funcionamiento de un coche, un bus hasta una motocicleta. Al
ser la espina dorsal del vehículo, el chasís es aquel que recibe las mayores fuerzas, impactos y
deformaciones ya que es el mediador entre el piso y los otros sistemas que este soporta [1].
Un chasís debe ser construido teniendo en cuenta que sea ligero y resistente, por esta razón
es importante la geometría con la que se diseñe. Los fabricantes escogen diferentes geometrías
para evitar altas deformaciones y exceso de material, como por ejemplo refuerzos de diferentes
formas que permitan una fácil unión y otorgando gran rigidez [2].
Al ser la estructura que soporta todo en el vehículo, el chasís se expone a vibraciones
provenientes de los mismos sistemas que conlleva, como el motor, la carga que transporta,
además de irregularidades en la vía por la que transita [3]. Por otro lado, se debe tener en cuenta
que el vehículo está expuesto a impactos, los cuales se transmiten al chasís. Adicionalmente, hay
transferencias de carga por dinámica longitudinal al momento de la aceleración y desaceleración
(frenado) del coche, y lateral, como lo son giros. Todas estas anteriores cargas se deben tener
en cuenta para el correcto diseño de una estructura tan importante, evitando deformaciones y
posible fractura del chasís.
1.2. Motivación
Existen distintos artículos y proyectos acerca del modelamiento de karts tanto eléctricos
como de combustión interna; sin embargo, estos modelos no tienen en cuenta las deformaciones
que experimenta el chasís cuando es sometido tanto a fuerzas estáticas como dinámicas. Además
de no contemplarse la flexibilidad de la estructura, se han realizado modelos teniendo en cuenta
únicamente fuerzas estáticas sobre el chasís, no obstante, existen fuerzas que se generan al
realizarse curvas a diferentes velocidades, al acelerar o desacelerar (frenar) el vehículo e incluso
cuando existen impactos. Por esta razón, este proyecto de grado está enfocado en el

8
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
modelamiento del chasís de manera más confiable utilizando el método de elementos finitos por
medio del programa MSC Adams y sus diferentes módulos.
1.3. Objetivo General
Desarrollar el modelo computacional del chasís de un kart eléctrico para obtener el
desempeño de este, teniendo en cuenta las deformaciones a las que se expone la estructura con
fuerzas estáticas y dinámicas.
1.4. Objetivos Específicos
• Obtener conocimiento y familiarizarse con los programas MSC Adams View, Adams
ViewFlex, Fe – Part y Adams Flex para realizar de manera completa el modelo del
chasís como un cuerpo flexible.
• Definición de los estados de carga estáticos y dinámicos.
• Definición de la geometría del chasís incluyendo las características del kart eléctrico.
• Simulación y modelamiento de acuerdo con las cargas y geometría definidas.

9 KART ELÉCTRICO
2. KART ELÉCTRICO
2.1. Historia
Un kart es un vehículo terrestre que consta de 4 ruedas no alineadas en contacto con el
suelo, dos de ellas (delanteras) controlan la dirección y las traseras la potencia del kart. Las
partes que lo componen son: el chasís, las llantas, el motor, la dirección y la transmisión [4]. Se
debe tener en cuenta que los karts no tienen suspensión, por esto se debe diseñar de manera
adecuada el chasís ya que este recibe directamente todos los impactos y soporta todas las cargas.
El primer kart se fabricó en la década de los 50 en una base aérea estadounidense, para este
prototipo se utilizaron piezas reutilizables de aviones y un motor de cortadora de césped que
permitía alcanzar una velocidad máxima de 50𝑘𝑚
ℎ. Actualmente, los karts han evolucionado de
manera avanzada logrando alcanzar hasta 200𝑘𝑚
ℎ y mejorando su rendimiento en la dinámica
vehicular. Además, se obtienen avances en los diseños de sus partes e, incluso, uso de motores
eléctricos como fuente de propulsión [5].
En la Universidad de los Andes se está trabajando en un proyecto que consta del análisis,
modelamiento, implementación y construcción de un kart con propulsión eléctrica (Ilustración
1). Este proyecto ha sido dirigido por el profesor Andrés González y se han realizado las
correspondientes selecciones y mejoras del motor eléctrico, redistribución de cargas,
implementación de frenado regenerativo, se permitió calibrar el acelerador del kart, entre otros
progresos en el sistema de frenos y problemas térmicos [6].
Ilustración 1. Prototipo de kart eléctrico desarrollado en la Universidad de los Andes.

10
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
2.2. Chasís
El chasís es el elemento más importante de un vehículo. Este es el que mantiene todas las
partes, componentes y subsistemas juntos; además de ser el sistema que soporta todas las cargas
que se pueden aplicar al vehículo. Entre las cargas está el peso de cada componente y fuerzas
que se generan durante aceleraciones, desaceleraciones y curvas.
Teniendo en cuenta la importancia del chasís en un vehículo es igualmente transcendental
asegurar la seguridad y la comodidad. En un vehículo sobre cuatro ruedas es indispensable
asegurar la protección de los pasajeros contra algún riesgo en caso de algún choque. Si se tiene
un impacto frontal, la energía es absorbida por un atenuador de impactos unido al chasís. Por
otro lado, si el accidente provoca un volcamiento, los aros principales y laterales protegen a los
pasajeros. Así mismo, las barras laterales protegen de un impacto lateral [7].
Existen ciertas exigencias para la construcción del chasís de un kart eléctrico, aunque no
están reglamentadas en el país y el único reglamento oficial de carácter no obligatorio lo maneja
la CIK-FIA (Commission Internationale de Karting - Federation Internationale de L’Automobile).
Estos requerimientos son [8]:
• Todas las partes del chasís deben estar unidas fijamente entre ellas o a la base.
• Debe haber conexiones articuladas únicamente para el soporte convencional y la
dirección.
• Está prohibido el uso de cualquier tipo de suspensión.
• No es permitido el uso de titanio.
• Al ser el chasís la parte central del vehículo debe estar en capacidad de absorber las
cargas producidas al momento de la marcha.
• La construcción debe ser con una geometría tubular en acero imantado con estructura
monolítica de piezas soldadas o fundidas.
El proyecto realizado en la Universidad de los Andes consta de un chasís con un peso
aproximado de 60 kg que soporta alrededor de 112 kg adicionales repartidos en 34 kg del motor
y las cuatro baterías utilizadas, y 80 kg del conductor [5].

11 KART ELÉCTRICO
Ilustración 2. Modelo CAD del chasís construido en la Universidad de los Andes.
2.3. Especificaciones Generales Kart BTA Racing
El grupo BTA Racing (Bogotá Team Andes Racing) ha realizado durante años proyectos
relacionados con el diseño, simulación, modelamiento y construcción de un kart eléctrico. Este
kart se divide en cuatro sistemas: potencia, movimiento, estructura y protección, como se
describen a continuación [5]:
2.3.1. Sistema de Potencia
Este sistema tiene 4 componentes: motor, controlador eléctrico, baterías y control
BMS.
La fuente de propulsión del kart se basa en un motor eléctrico Motoenergy
ME1117PMAC, con un voltaje de 24 – 48 VDC, síncrono de imanes permanentes con
una conexión en Y trifásico. Tiene incorporado un ventilador junto con un sensor de
temperatura interna y su peso es de aproximadamente 10 kg.
El controlador eléctrico Sevcon Gen4 de 36 – 48 V, con 275 A, es aquel que regula
la corriente suministrada al motor por medio de un potenciómetro ajustado por un pedal
acelerador. Cuenta con un sistema de diagnóstico automático, protección de software y
hardware y un circuito lógico integrado.
En cuanto a la fuente de energía, las baterías, son GBS (4 celdas) de 12 V con una
carga de 100 Ah. Estas baterías cuentan con un disolvente amigable con el medio

12
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
ambiente, además de una mezcla química segura con bajas probabilidades de explosión.
Al ser el kart un vehículo terrestre, este contará con vibraciones e impactos y es
necesario evitar algún tipo de problema con estas situaciones dinámicas, por esta razón
las baterías tienen conexiones robustas y facilidad de conexión con el control BMS. El
kart es equipado con cuatro baterías que tendrían una salida de 48 V en total.
El controlador BMS, encargado de administrar la carga de las baterías, consta de una
unidad de control y un módulo de celda marca EMUS.
2.3.2. Sistema de Movimiento
Este sistema se divide en cuatro subsistemas: dirección, ruedas, frenado y
transmisión.
2.3.2.1. Subsistema de Dirección
Este subsistema está compuesto por el volante, la columna de dirección, la
bieleta, las rótulas y los brazos de dirección. En la Ilustración 3 se muestran estas
partes que componen la dirección:
Ilustración 3. Subsistema de dirección del kart, las barras de color rojo son las partes que componen la dirección [5].
13 KART ELÉCTRICO
2.3.2.2. Subsistema de Ruedas
Las ruedas del kart son las únicas que deben estar en contacto con el
pavimento, dependiendo su presión, tendrán más agarre o permitirán mayor
velocidad; entre menos presión aumenta el agarre, de lo contrario, se tendrá
mejor velocidad en punta. De acuerdo con el piloto profesional Jhon Portilla,
estudiante de la Universidad de los Andes, el valor adecuado de presión en las
ruedas es de 13 psi. Una rueda está compuesta por la llanta y el neumático, siendo
la primera la parte rígida que se une al eje o buje y sirve como base de la rueda;
por otro lado, el neumático es la parte de caucho o goma que está en contacto
con el suelo y aumenta la fricción entre la rueda y el pavimento.
Generalmente, las llantas traseras son más gruesas para mayor tracción y las
delanteras para permitir un mejor direccionamiento del kart.
Se recomienda en la rueda una baja densidad, menor peso en el kart; alta
rigidez, ya que se deben evitar la deformación en la medida de lo posible; y alta
conductividad térmica para evitar que el aumento de temperatura sea sectorizado
en la rueda.
2.3.2.3. Subsistema de Frenado
Los frenos son utilizados para la reducción de velocidad, ya sea de manera
drástica o moderada. Este subsistema consta de un disco de freno, que gira a la
misma velocidad angular que la rueda, las mordazas, las pinzas y la bomba
hidráulica. La desaceleración por medio del freno depende de la presión ejercida
por el pedal sobre la bomba hidráulica. El funcionamiento inicia cuando el piloto
acciona el pedal, conectado por medio de una guaya a la bomba, aplicando presión
hidráulica a las pastillas del freno que aprietan el disco no permitiendo su libre
rotación.
14
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
2.3.2.4. Subsistema de Transmisión
La transmisión del motor a las ruedas se ejecuta por medio de un piñón que
transfiere el par a través de una cadena DID 219. La relación de transmisión entre
el piñón unido al motor y el plato que mueve el eje de tracción se define a través
de la siguiente ecuación:
𝑁𝑔 =𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑖𝑒𝑛𝑡𝑒𝑠 𝑝𝑙𝑎𝑡𝑜
𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑖𝑒𝑛𝑡𝑒𝑠 𝑝𝑖ñó𝑛
Donde 𝑁𝑔 es la relación de transmisión. Finalmente, Felipe Rivera en su
proyecto de grado expone que la elección final fue de 20 dientes en el piñón y 68
en el plato [5].
2.3.3. Sistema de Estructura
Este está definido, como se indicó previamente, por el chasís y los soportes de los
otros sistemas.
El chasís está construido con tubos de acero al cromo -molibdeno y debe tener una
rigidez alta que no permita niveles de deformación muy elevados. El chasís utilizado en el
proyecto del grupo BTH Racing es marca Birel.
Los soportes de aluminio 6061, para disminuir el peso, sostienen al motor eléctrico,
las baterías y un panel eléctrico:
• Soporte de motor: se construyó por medio de la máquina CNC y soldadura.
• Soporte baterías: se diseñó con la geometría para soportar 3 baterías en la
parte trasera para mejorar la tracción en las llantas traseras.
• Soporte de panel eléctrico: el material con el que se fabricó es PLA utilizando
la impresora 3D de la Universidad de los Andes.

15 KART ELÉCTRICO
2.3.4. Sistema de protección
La carrocería cumple la función de proteger el interior del vehículo, el piloto y los
sistemas eléctricos; además de mejorar la aerodinámica del kart. Por otro lado, se
requiere de un sistema de control para el motor y los compuestos eléctricos. Este
sistema se compone de:
• Potenciómetro: este compuesto se gradúa para controlar los requerimientos
de la aceleración.
• Parada de emergencia: este corta la circulación de electricidad apagando todo
circuito eléctrico por temas de seguridad en caso de alguna falla.
• Interruptor de polaridad: es necesario cambiar la polaridad de un motor
trifásico para cambiar su dirección de movimiento (adelante y reversa).
• Llave de encendido: por seguridad, se requiere de una llave de encendido para
que este sea el único medio para encender el kart, así no se enciende por
equivocación o sin autorización.
• Main contactor: este componente realiza seguimiento a la corriente que
alimenta el circuito, en caso de presenciarse picos más altos del rango previsto,
se corta la circulación de electricidad.
• Motor eléctrico: al ser el motor eléctrico una de las partes más importantes
del kart, es necesario tener las debidas precauciones para evitar averiarlo. Por
esta razón se utiliza un controlador que contiene programas que permiten el
control de todos los circuitos integrados al sistema.

16
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
3. MODELAMIENTO DEL CHASÍS DE UN KART (TRABAJOS PREVIOS)
3.1. Trabajos previos externos a BTA Racing
Mohad y Amir diseñaron un chasís de un carro ‘Eco-Challenge’ en el software CATIA para
luego exportarlo a un software de análisis de elementos finitos (FEA) llamado Abaqus CAE.
Utilizaron dos secciones transversales: circular hueca de 50 𝑚𝑚 de diámetro y 2.5 𝑚𝑚 de
espesor, y cuadrada hueca de igualmente 50 𝑚𝑚 de longitud y 2.3 𝑚𝑚 de espesor. El material
utilizado es acero simple al carbono con densidad de 7800𝑘𝑔
𝑚3, resistencia a la tensión de
400 𝑀𝑃𝑎, esfuerzo de fluencia de 300 𝑀𝑃𝑎, módulo de Young de 207 𝐺𝑃𝑎 y coeficiente de
Poisson de 0.3 [7]. El modelo final es como el mostrado en la Ilustración 4.
Ilustración 4. Análisis de desplazamiento con carga de 1.5g [7].
Para la simulación del chasís utilizaron 5 diferentes condiciones de carga:
• Carga estática: en estas condiciones solamente se tienen en cuenta los pesos de los
componentes, incluido el conductor. Estas cargas se ubicaron en puntos específicos
sobre el chasis dando como resultado un esfuerzo y desplazamiento máximos de
52.3 𝑀𝑃𝑎 y 1.68 𝑚𝑚, respectivamente en el lugar donde se encuentra el conductor.
• Carga 4𝑔: para realizar esta simulación, se fijó la parte trasera del chasís y se aplicó la
carga de 4𝑔 al aro principal. Se obtuvieron un esfuerzo y desplazamiento máximos de
85.6 𝑀𝑃𝑎 y 7.6 𝑚𝑚, respectivamente. Este análisis se realizó simulando el
volcamiento del vehículo donde el aro principal debería proteger al conductor,
suponiendo que este segundo está 50 mm más abajo del primero.

17 MODELAMIENTO DEL CHASÍS DE UN KART (TRABAJOS PREVIOS)
• Carga 1.5𝑔 en aceleración: esta simulación se realizó exponiendo cada componente a
una carga de 1.5𝑔 con una fuerza de aceleración. El máximo esfuerzo fue de 86.8 𝑀𝑃𝑎
y se encontró en el soporte del motor; por otro lado, el máximo desplazamiento fue
de 4.2 𝑚𝑚 y se obtiene en el asiento del conductor.
• Carga 1.5𝑔 en desaceleración: en este caso, se aplican las mismas fuerzas que en la
simulación anterior, a diferencia que esta vez es con una fuerza de desaceleración. Los
resultados obtenidos en este análisis son similares que con carga de 1.5𝑔 en
aceleración. El máximo esfuerzo fue de 75 𝑀𝑃𝑎 en el soporte del motor y el máximo
desplazamiento de 3.79 𝑚𝑚 en el asiento del conductor.
• Carga torsional de 2500𝑁𝑚
𝑔𝑟𝑎𝑑𝑜: para este análisis se fijaron los soportes donde se
posicionan las llantas y se aplica la carga torsional en la parte frontal del chasís. El
máximo esfuerzo se ubica en la parte frontal con 199.6 𝑀𝑃𝑎 y el máximo
desplazamiento es de 5.2 𝑚𝑚 en los laterales de la parte frontal del chasís.
Finalmente, Mohad y Amir concluyen que el chasís es apto para su uso teniendo en cuenta
las propiedades del material y las reglas y regulaciones impuestas.
Por otro lado, Mirone realizó un análisis de un go-kart con un chasís compuesto por los
materiales 25CrMo4 y ASTM A284. El peso total del vehículo y el conductor fue de 140 kg con
una distribución del 57% en las llantas traseras y el 43% restantes en las llantas delanteras. Mirone
utilizó el software MSC Adams para modelar el chasís por medio de la herramienta Discrete
Flexible Links que se explicará en el capítulo 4.5. Inicialmente se validó el modelo realizado con
pruebas experimentales donde se ancló la parte trasera a una pared y se aplicó las cargas
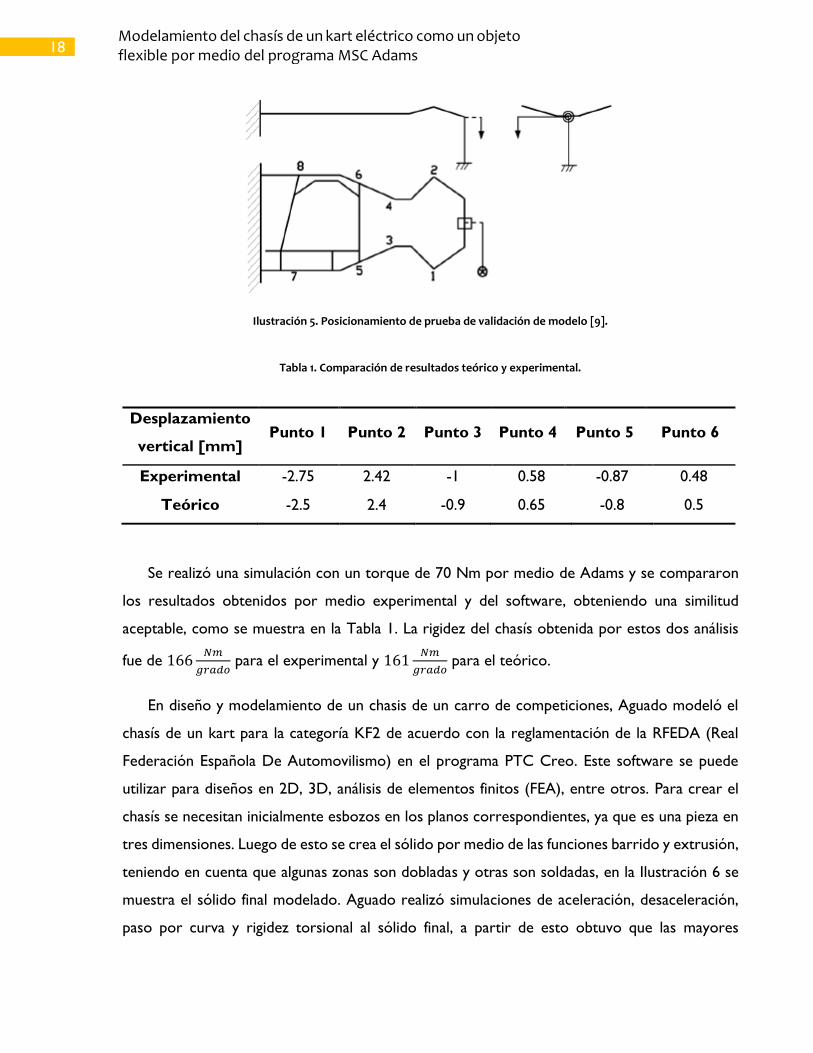
torsionales en el tubo delantero del chasís [9]. Para evitar desplazamientos, se fijó por medio de
una bisagra la barra delantera a una distancia determinada del piso, el posicionamiento del chasís
se muestra en la Ilustración 5.
18
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 5. Posicionamiento de prueba de validación de modelo [9].
Tabla 1. Comparación de resultados teórico y experimental.
Desplazamiento
vertical [mm] Punto 1 Punto 2 Punto 3 Punto 4 Punto 5 Punto 6
Experimental -2.75 2.42 -1 0.58 -0.87 0.48
Teórico -2.5 2.4 -0.9 0.65 -0.8 0.5
Se realizó una simulación con un torque de 70 Nm por medio de Adams y se compararon
los resultados obtenidos por medio experimental y del software, obteniendo una similitud
aceptable, como se muestra en la Tabla 1. La rigidez del chasís obtenida por estos dos análisis
fue de 166𝑁𝑚
𝑔𝑟𝑎𝑑𝑜 para el experimental y 161
𝑁𝑚
𝑔𝑟𝑎𝑑𝑜 para el teórico.
En diseño y modelamiento de un chasis de un carro de competiciones, Aguado modeló el
chasís de un kart para la categoría KF2 de acuerdo con la reglamentación de la RFEDA (Real
Federación Española De Automovilismo) en el programa PTC Creo. Este software se puede
utilizar para diseños en 2D, 3D, análisis de elementos finitos (FEA), entre otros. Para crear el
chasís se necesitan inicialmente esbozos en los planos correspondientes, ya que es una pieza en
tres dimensiones. Luego de esto se crea el sólido por medio de las funciones barrido y extrusión,
teniendo en cuenta que algunas zonas son dobladas y otras son soldadas, en la Ilustración 6 se
muestra el sólido final modelado. Aguado realizó simulaciones de aceleración, desaceleración,
paso por curva y rigidez torsional al sólido final, a partir de esto obtuvo que las mayores

19 MODELAMIENTO DEL CHASÍS DE UN KART (TRABAJOS PREVIOS)
deformaciones se obtienen en la aceleración, desaceleración y paso por curva. Para obtener los
valores de estas fuerzas, Aguado utilizó el gráfico de telemetría de un kart de competición, que
se muestra en la Ilustración 7, obteniendo las mayores aceleraciones tanto longitudinales como
laterales. Estas aceleraciones máximas se muestran en la Tabla 2 [10].
Ilustración 6. Sólido final sometido a prueba de paso por curva [10].
Tabla 2. Aceleraciones máximas y mínimas de un kart de competición.
Aceleración Mínima Máxima
Longitudinal −1.13𝑔 0.81𝑔
Lateral −2.44𝑔 2.66𝑔
Ilustración 7. Valores de aceleraciones de un kart en un circuito específico [10].

20
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Con estas aceleraciones realiza simulaciones con un factor de seguridad de 1.15, es decir,
cada aceleración la multiplica por este valor para aplicar una aceleración mayor (o menor, según
sea el caso) y así tener un resultado que pueda permitir aceleraciones más altas (o más bajas)
que las reales. Las pruebas de aceleración (longitudinal máxima), Aguado restringe los
desplazamientos de las direcciones longitudinal, transversal y vertical en el eje trasero, ya que
en este se encuentra la tracción del vehículo, por otro lado, el eje delantero solo hizo
restricciones en las direcciones transversal y vertical. Para las pruebas de desaceleración
(longitudinal mínima (negativa)) realizó la restricción de las direcciones longitudinal, transversal
y vertical de ambos ejes, puesto que en las cuatro llantas se encuentran frenos. Para las pruebas
de paso por curva restringe los dos ejes en las direcciones transversal y vertical, la dirección
longitudinal se deja libre ya que, al momento de girar, un vehículo no tiene restricciones para
moverse en esta dirección (dirección vista respecto al mismo vehículo y no a un punto en tierra).
Para medir la rigidez del chasís, se ejerce un par torsor en el tren delantero y se restringe
el eje trasero en todas las direcciones. Para obtener este par, Aguado propone una fuerza de
385.25 𝑁 sobre cada unión de las ruedas delanteras, y con una longitud del eje de 648.876 𝑚𝑚,
el par torsor final es de 250 𝑁𝑚 en cada rueda.
En cuanto a los resultados obtenidos en este proyecto [10], la Tabla 3 muestra los esfuerzos
de Von Mises y deformaciones máximas para cada una de las pruebas.
Tabla 3. Resultados pruebas de aceleraciones [10].
Prueba 𝝈𝑽𝑴 máximo [𝑴𝑷𝒂] Deformación máxima [𝒎𝒎]
Aceleración 65 0.65
Desaceleración 298 2.32
Paso en curva 310 2.5
Al aplicar el par torsor de 250 𝑁𝑚, Aguado obtuvo una tensión máxima de Von Mises de
304 𝑀𝑃𝑎, esto demuestra que el material se encuentra en la zona elástica de la deformación al
estar por debajo del esfuerzo de fluencia (355 𝑀𝑃𝑎). Por parte de las deformaciones, encontró

21 MODELAMIENTO DEL CHASÍS DE UN KART (TRABAJOS PREVIOS)
desplazamientos máximo y mínimo de 6.13 𝑚𝑚 y −8.08 𝑚𝑚, respectivamente. Con estos
resultados utiliza la siguiente fórmula para hallar la rigidez torsional:
𝜃 = arctan (|𝑌𝑚𝑎𝑥| + |𝑌𝑚𝑖𝑛|
𝑙𝑒𝑗𝑒) = arctan (
6.13 + 8.08
648.876) = 1.255°
𝐾 =𝑇
𝜃=
250
1.255= 199.2
𝑁𝑚
𝑔𝑟𝑎𝑑𝑜
Donde 𝜃 es el ángulo de girado, 𝑌𝑚𝑎𝑥 y 𝑌𝑚𝑖𝑛 son los desplazamientos máximo y mínimo
obtenidos, 𝑙𝑒𝑗𝑒 es la longitud del eje, 𝑇 es el torque aplicado y 𝐾 es la rigidez torsional.
3.2. Trabajo previo relacionado con BTA Racing
Desde la Universidad de los Andes, Tony Guerra realizó un análisis del chasís del kart
eléctrico que se está construyendo por parte del grupo BTA Racing. Guerra utilizó el software
ANSYS para realizar la simulación de cargas estáticas y caracterización de rigidez torsional y de
deflexión del chasís. En este trabajo se especifica el área transversal del chasís circular hueca con
radio externo de 16 𝑚𝑚 y grosor de 2 𝑚𝑚 [6]. Finalmente, el modelo obtenido es el que se
muestra en la Ilustración 8.
Ilustración 8. Modelo final - simulación cargas estáticas [6].

22
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
El análisis de cargas estáticas realizado fue con los pesos de los componentes del sistema del
kart eléctrico: conductor, baterías y motor. Con esta simulación se obtuvo un resultado de
máximos esfuerzos de 34 𝑀𝑃𝑎 y 25 𝑀𝑃𝑎 en los anclajes del eje trasero, seguido de un esfuerzo
de 17 𝑀𝑃𝑎 en el punto de concentración del peso del conductor y las baterías. En cuanto al
desplazamiento fue de 0.99 𝑚𝑚 en el centro del kart. Para caracterizar la rigidez torsional,
Guerra aplicó una fuerza de 4300 𝑁 en cada extremo del eje delantero en sentido contrario del
eje perpendicular al eje, esto con el fin de general un torque al chasís y así obtener un punto de
mayor desplazamiento y calcular la rigidez torsional. El desplazamiento máximo fue de 53 𝑚𝑚.
Esta fuerza de 4300 𝑁 se obtuvo durante la simulación de un vehículo de fórmula SAE tomando
curvas a una velocidad de 70𝑘𝑚
ℎ, al ser similares la masa y las velocidades desarrolladas por
ambos karts, es válido utilizar esta fuerza para la obtención de la rigidez torsional [6]. El valor
de este último es de 10.862𝑁𝑚
𝑔𝑟𝑎𝑑𝑜.
23 MSC ADAMS
4. MSC ADAMS
MSC Adams es un software especializado en sistemas mecánicos. Este realiza el estudio dinámico
de cuerpos en movimiento, cargas y fuerzas distribuidas en los sistemas. Adams es usado por ingenieros
dedicados a la producción automotriz y otros sectores industriales. Para evitar altos costos en
construcción de prototipos para pruebas, se generan modelos construidos por medio de un software
para perfeccionarlos lo máximo posible y así luego utilizar la menor cantidad de ejemplares físicos [11].
Existen diferentes subclases de MSC Adams dependiendo el análisis que se requiera: View, Solver,
Machinery, Car, FE – Part, Flex, ViewFlex, MaxFlex, Machinery, entre otros. Para el análisis del chasís
se utilizaron Adams View, ViewFlex y FE – Part.
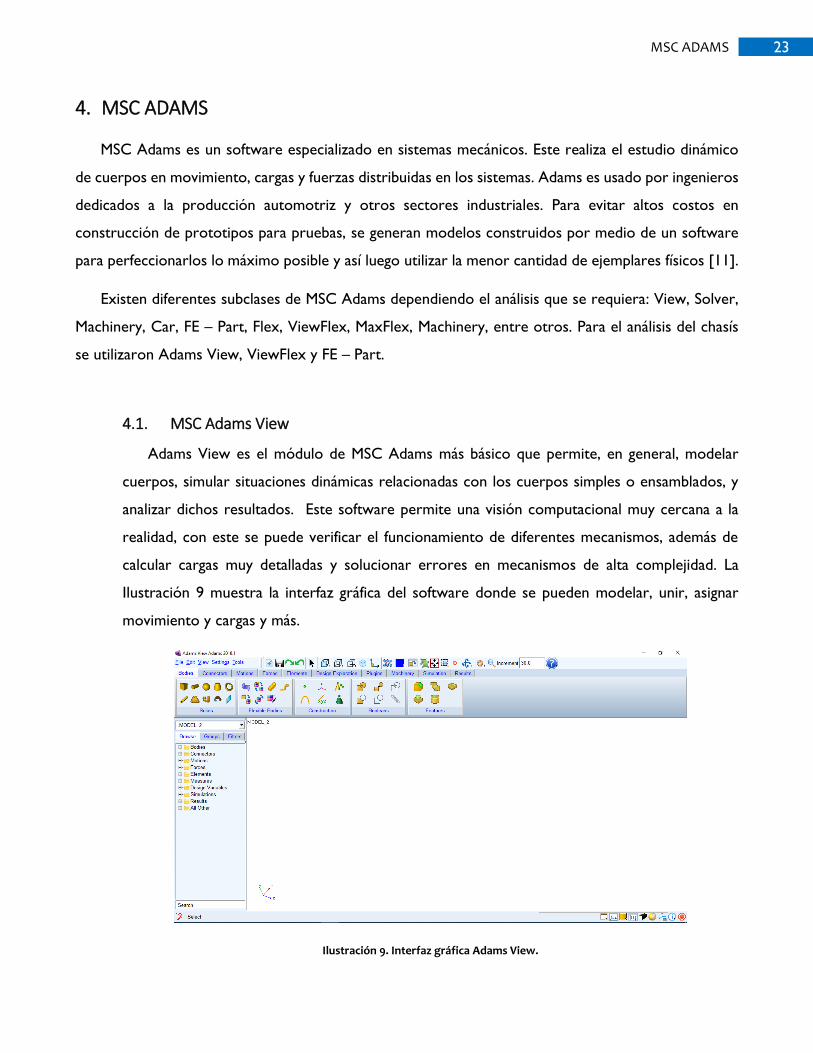
4.1. MSC Adams View
Adams View es el módulo de MSC Adams más básico que permite, en general, modelar
cuerpos, simular situaciones dinámicas relacionadas con los cuerpos simples o ensamblados, y
analizar dichos resultados. Este software permite una visión computacional muy cercana a la
realidad, con este se puede verificar el funcionamiento de diferentes mecanismos, además de
calcular cargas muy detalladas y solucionar errores en mecanismos de alta complejidad. La
Ilustración 9 muestra la interfaz gráfica del software donde se pueden modelar, unir, asignar
movimiento y cargas y más.
Ilustración 9. Interfaz gráfica Adams View.

24
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
En la parte superior se puede encontrar la respectiva barra de herramientas que consta de
Bodies, Connectors, Motions, Forces, Elements, Design Exploration, Plugins, Machinary,
Simulation, Results.
En la sección Bodies se encuentran todas las opciones que se pueden utilizar para el
modelamiento de los cuerpos. Se puede construir el modelo con distintas geometrías y realizarle
las modificaciones necesarias como bordes y agujeros.
En la sección Connectors se realizan las uniones entre dos cuerpos o, incluso, la unión fija
entre un cuerpo y tierra. Estas uniones se realizan en nodos con ubicaciones específicas según
el punto de origen
En la sección Motions se configuran los movimientos de los cuerpos en las uniones creadas
en la sección Connectors. Los movimientos traslacionales o rotacionales.
En la sección Forces se asignan las fuerzas sobre el cuerpo. Estas fuerzas son puntuales,
torques, cojinetes, resortes, incluso, fuerzas especiales como contactos, llantas o cargas
distribuidas.
En la sección Elements crear elementos que almacenan información alfanumérica del modelo
como arreglos, curvas, matrices, entre otros.
En la sección Design Exploration es posible crear mediciones de desplazamientos, ángulos,
sensores y diseñar variables.
En la sección Plugins están complementos para análisis de controles, vibraciones, durabilidad
y sistemas mecatrónicos.
En la sección Machinery se pueden crear partes mecánicas como poleas, engranajes, cables e
incluso motores eléctricos.
En la sección Simulation están las opciones necesarias para simular el modelo. Las
simulaciones se pueden realizar por medio de un script creado en Adams Solver o simplemente
correr la simulación manualmente.
En la sección Results se encuentran las opciones de PostProcessor, que es el visor de
resultados, trazado de posición relativa, que traza un recorrido que realiza un punto en el

25 MSC ADAMS
modelo, animaciones, que es la opción de mostrar el movimiento y el comportamiento del
modelo sin realizar cálculos, solamente como forma ilustrativa, entre otros.
4.2. MSC Adams ViewFlex
Existe un tipo de archivo con extensión .mnf (“Modal Neutral File”) que contiene toda la
información de un cuerpo flexible y se modela por medio de programas externos de análisis de
elementos finitos (FEA) como por ejemplo Ansys, MSC Nastran, Autodesk Inventor, entre
otros.
Adams ViewFlex es un complemento incluido en Adams View y Adams Car que permite
crear y agregar cuerpos flexibles a un modelo y generar resultados de simulaciones más realistas
sin necesidad de importar un archivo .mnf. Para el manejo de Adams ViewFlex se requiere
conocimientos en Adams View y modelamiento de elementos finitos [12].
El acceso a este módulo se realiza desde Adams View, en la sección Bodies por medio del
botón ViewFlex: create flex body without MNF import, como se muestra en la Ilustración 10.
Ilustración 10. Acceso a Adams ViewFlex.
Inicialmente se debe modelar el cuerpo en Adams View, luego oprimir la opción que se
muestra en la Ilustración 10 y seleccionar el cuerpo que se desea convertir de rígido a flexible.
Se debe tener en cuenta que Adams ViewFlex realiza análisis de cuerpos con deformaciones
moderadas, con menos del 10% de la longitud característica del cuerpo [12].
4.3. MSC Adams Flex
Al igual que Adams ViewFlex, Adams Flex realiza análisis de cuerpos flexibles con
deformaciones moderadas. Este complemento se podría utilizar con Adams Solver, sin embargo,
se recomienda utilizarlo con Adams View para observar el análisis mediante una interfaz gráfica.

26
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Por otro lado, para utilizar Adams Flex se requiere de un archivo .mnf ya que el software
reemplaza completamente un cuerpo modelado en Adams View por uno que se haya modelado
en un programa de análisis de elementos finitos (FEA); esto quiere decir que se requiere el uso
conjunto con un programa externo.
Cuando se utilizan cuerpos flexibles se debe recordar que las deformaciones de estos son
una combinación lineal de pequeñas deformaciones que se unen a través del cuerpo [13]. Por
esta razón se debe tener especial cuidado con deformaciones grandes, ya que podrían tener
resultados erróneos. Más adelante se mostrará por qué se debe definir si un cuerpo es lineal o
no lineal para utilizar el software indicado.
El acceso a este módulo por medio de Adams View se realiza de manera similar a como se
accede a Adams ViewFlex. En la Ilustración 11 se muestra el lugar de ubicación de la herramienta.
Ilustración 11. Acceso a Adams Flex por medio de Adams View.
Con la opción Adams Flex: Create a Flexible Body aparecerá un menú en el que se requerirá
el archivo MNF, modelado en un software externo, que reemplazará la pieza rígida original de
Adams. La Ilustración 12 muestra el menú mencionado.
Ilustración 12. Menú de Adams Flex: crear un cuerpo flexible.

27 MSC ADAMS
4.4. MSC FE – Part
Una FE – Part es un modelo completamente nativo de Adams que se utiliza para analizar
objetos que puedan llegar a tener grandes deformaciones, es decir, que tienen geometrías no
lineales. Este método de análisis flexible es recomendado para el estudio de estructuras tipo viga
[14]. El modelo FE – Part difiere de Adams Flex en cuanto a que no es necesario utilizar un
archivo externo para convertir una parte en flexible y que no tiene un límite de deformación
para analizar la flexibilidad de cualquier cuerpo. Esta última es igualmente la diferencia entre FE
– Part y Adams ViewFlex.
La Ilustración 13 muestra la herramienta necesaria para crear una FE – Part.
Ilustración 13. Herramienta para crear una FE - Part.
Para crear una FE – Part es necesario asignarle una rigidez y un material al cuerpo que se
creará, como se muestra en la Ilustración 14, además, en el paso 2 (Ilustración 15) es necesario
indicar los dos puntos o curva de referencia. Finalmente, en el paso tres se selecciona la
geometría del área transversal del cuerpo a modelar, si es necesario hay una opción para crear
la geometría de acuerdo con las dimensiones requeridas (Ilustración 16).

28
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 14. Asignación de material y rigidez de la nueva FE - Part.
Ilustración 15. Selección de puntos entre los cuales se creará la parte.
Ilustración 16. Menú de nodos y ángulos entre la posición inicial y final. Creación de nueva geometría de la sección transversal de la FE - Part.

29 MSC ADAMS
Se pueden crear múltiples nodos entre el nodo inicial y nodo final. Para esto, se indica la
cantidad de nodos a crear y se presiona Insert, de igual manera para eliminar con la opción Delete
(Ilustración 16). Cada nodo debe estar con un ángulo y a una distancia entre 0 y 1 en medio de
los extremos, donde el nodo final es 1 y el nodo inicial es 0.
4.5. MSC Discrete Flexible Links
Un Discrete Flexible Link consiste en la unión de dos o más partes rígidas por medio de
elementos de fuerza de vigas [15]. En este caso, no se tiene un modelo flexible completamente
sino solamente varias partes rígidas pequeñas entre sí unidas por fuerzas que permiten la flexión.
Lo anterior indica que internamente, cada una de estas pequeñas partes no se deformará, lo que
indicará la deformación serán las uniones entre estos sólidos rígidos.
Para utilizar esta herramienta, se oprime el botón que se muestra en la Ilustración 17 en la
sección Bodies. Luego de esto se completa la información en el menú emergente. Se asigna un
nombre, se escoge un material (Ilustración 18), se indica el número de segmentos requeridos,
es decir, el número de partes rígidas que compondrán el sólido flexible completo. Para
seleccionar los markers (1 y 2) entre los que se posicionará el cuerpo, se realiza el
procedimiento que se puede observar en la Ilustración 19 donde Pick se selecciona si se quiere
oprimir el marker directamente desde el modelo, Browse se utiliza para buscar los markers ya
creados previamente, Guesses muestra una lista de markers que podrían ser útiles para la
selección y, finalmente, Create donde se crea un nuevo marker en el modelo y luego se selecciona
el que se creó recientemente. Por último, se selecciona la sección transversal de la parte que se
modelará.
Ilustración 17. Herramienta para crear Discrete Flexible Links.

30
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 18. Selección de material.
Ilustración 19. Selección de markers entre los que se posicionará el nuevo sólido.

31 ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
5. ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
Como se comentó anteriormente, MSC Adams tiene diferentes módulos para realizar análisis de
cuerpos flexibles. Además, se pueden exportar diferentes tipos de archivos CAD como Inventor. En
este caso, se realizó el modelamiento del chasís como cuerpo flexible de dos maneras diferentes: por
medio del CAD modelado en Autodesk Inventor en proyectos de grado anteriores de la Universidad
de los Andes; y por medio de un modelo realizado directamente en Adams View por medio de barras
y uniones, realizado por Jonathan Mikler en su proyecto de grado en el año 2018 [16].
5.1. Uso de Adams ViewFlex con CAD de Autodesk Inventor
En el 2018, Tony Guerra modeló la base del chasís del kart en el software Autodesk Inventor
[6], Ilustración 2, el cual se importó y se convirtió en un cuerpo flexible por medio de Adams
ViewFlex, como se muestra a continuación:
Lo primero que se debe realizar es importar el CAD a Adams View. Para esto se inicia el
programa y se cierra la ventana de bienvenida (Ilustración 20), luego, desde el menú File de la
barra superior del programa (Ilustración 21), se selecciona la opción Import….
Ilustración 20. Menú bienvenida Adams View.
Ilustración 21. Menú de archivos.
En la ventana emergente, se selecciona la opción Inventor (*.ipt, *.iam) en el tipo de archivo
y en el espacio de File To Read se oprime clic derecho y se selecciona el archivo correspondiente.
Por otro lado, es necesario crear un modelo nuevo, para esto se selecciona Model Name en la
lista desplegable debajo del espacio File To Read, clic derecho en el espacio en blanco y se
32
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
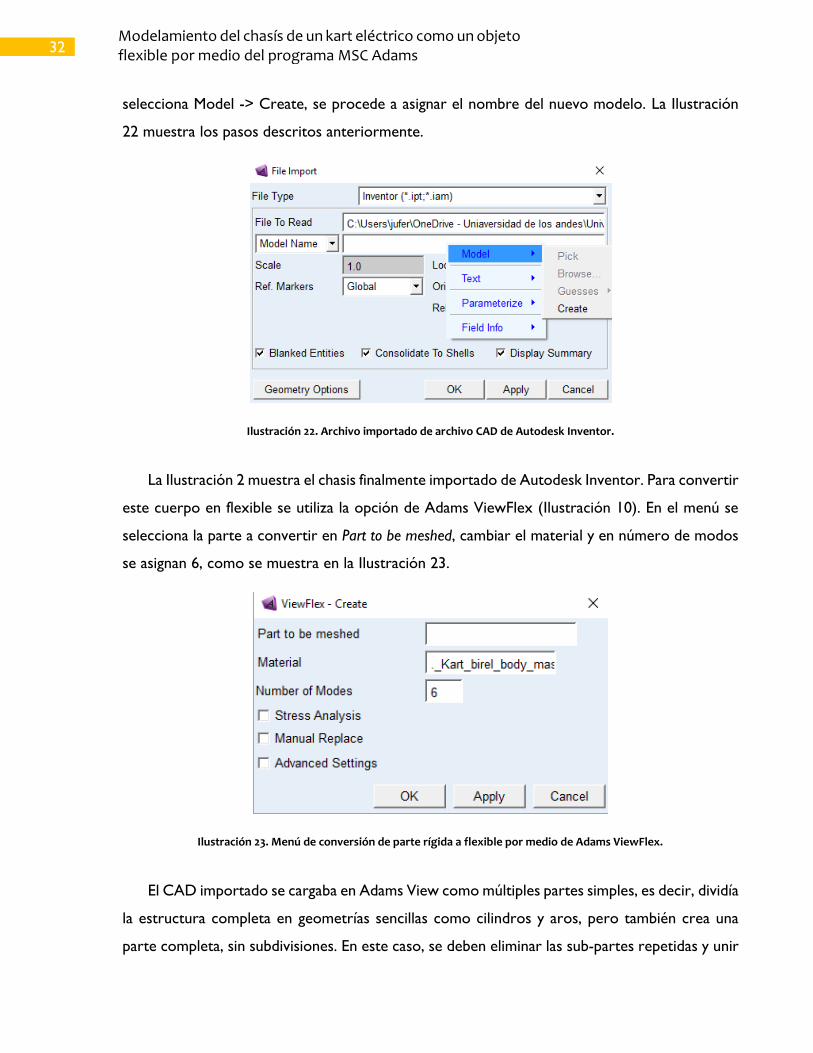
selecciona Model -> Create, se procede a asignar el nombre del nuevo modelo. La Ilustración
22 muestra los pasos descritos anteriormente.
Ilustración 22. Archivo importado de archivo CAD de Autodesk Inventor.
La Ilustración 2 muestra el chasis finalmente importado de Autodesk Inventor. Para convertir
este cuerpo en flexible se utiliza la opción de Adams ViewFlex (Ilustración 10). En el menú se
selecciona la parte a convertir en Part to be meshed, cambiar el material y en número de modos
se asignan 6, como se muestra en la Ilustración 23.
Ilustración 23. Menú de conversión de parte rígida a flexible por medio de Adams ViewFlex.
El CAD importado se cargaba en Adams View como múltiples partes simples, es decir, dividía
la estructura completa en geometrías sencillas como cilindros y aros, pero también crea una
parte completa, sin subdivisiones. En este caso, se deben eliminar las sub-partes repetidas y unir

33 ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
las que se encuentran solamente una vez para poder convertirla en flexible. La unión se realiza
utilizando la herramienta Boolean: Unite two solids y seleccionando los dos cuerpos a unir, la
Ilustración 24 muestra la herramienta que se debe utilizar.
Ilustración 24. Herramienta de unión de dos sólidos.
Una vez unidas todas las múltiples partes en una sola, al cargarla para convertirla en malla
(como explica la Ilustración 23), aparecía un error que indicaba que la parte se auto interceptaba
y por esta razón no era posible completar el proceso, como se muestra en la Ilustración 25. Se
contactó a MSC Support y se obtuvo el resultado de que había un error con la geometría del
CAD creado en Autodesk Inventor.
Ilustración 25. Error al convertir el CAD a una malla flexible por medio de Adams ViewFlex.
5.2. Uso de Adams Flex
Como se mencionó anteriormente, para el uso de Adams Flex se requiere de programas
externos que modelen o conviertan un modelo ya creado en una malla para análisis de elementos
finitos. Al ser necesario un software diferente a Adams y el propósito del proyecto es el uso de
MSC Adams, se decidió no utilizar este complemento para modelar el chasis del kart eléctrico
como un objeto flexible.
5.3. Modelamiento del chasis con MSC FE – Part
Con el uso de FE – Part es posible modelar el chasis completamente desde Adams y sin
necesidad de haber creado un modelo rígido previamente o una malla en un software externo.

34
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Para entender y comprobar el correcto funcionamiento de las FE - Part, se realizó una
prueba con una barra en voladizo. Para el paso 1 (Ilustración 14) se selecciona el material con
clic derecho sobre el espacio en blanco y se selecciona Material -> Guesses -> steel, y en las
secciones Damping Ratio (Stiffness) y Damping Ratio (Mass) se dejan predeterminadas. Estas dos
últimas secciones no afectan el resultado final ya que no se realiza un análisis modal sino un
análisis de la deformación final y el amortiguamiento no afecta la respuesta. Para la parte 2 se
selecciona en los campos de los puntos inicial y final las respectivas localizaciones. Para esto se
hace clic derecho y se selecciona Marker o Point, dependiendo el tipo de nodo que se vaya a
seleccionar, luego se selecciona Pick para seleccionar directamente realizando clic sobre el
modelo, Browse para buscar en el navegador del modelo, Guesses para seleccionar sugerencias
que realiza el programa o Create para crear un nuevo marker o point (Ilustración 15). En este
caso, se crearon previamente dos markers de la siguiente manera:
En la sección Bodies se selecciona la herramienta Construction Geometry: Marker, como
muestra la Ilustración 26. En el menú que aparece al lado izquierdo del programa, se escoge la
opción Add to Groung (Ilustración 27) y en el modelo se oprime clic derecho; a continuación,
aparece un recuadro como el de la Ilustración 28 para introducir las coordenadas deseadas. Para
los markers necesarios para la viga en voladizo se escogieron las coordenadas (0, 0, 0) y
(2000, 0, 0), es decir, esta viga medirá 2 metros ya que las unidades de longitud son milímetros.
Si se quiere realizar el cambio de alguna unidad de medida se selecciona Settings -> Units… en la
barra de opciones superior.
Ilustración 26. Herramienta de creación de Marker.
Ilustración 27. Menú de creación de marker.
35 ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
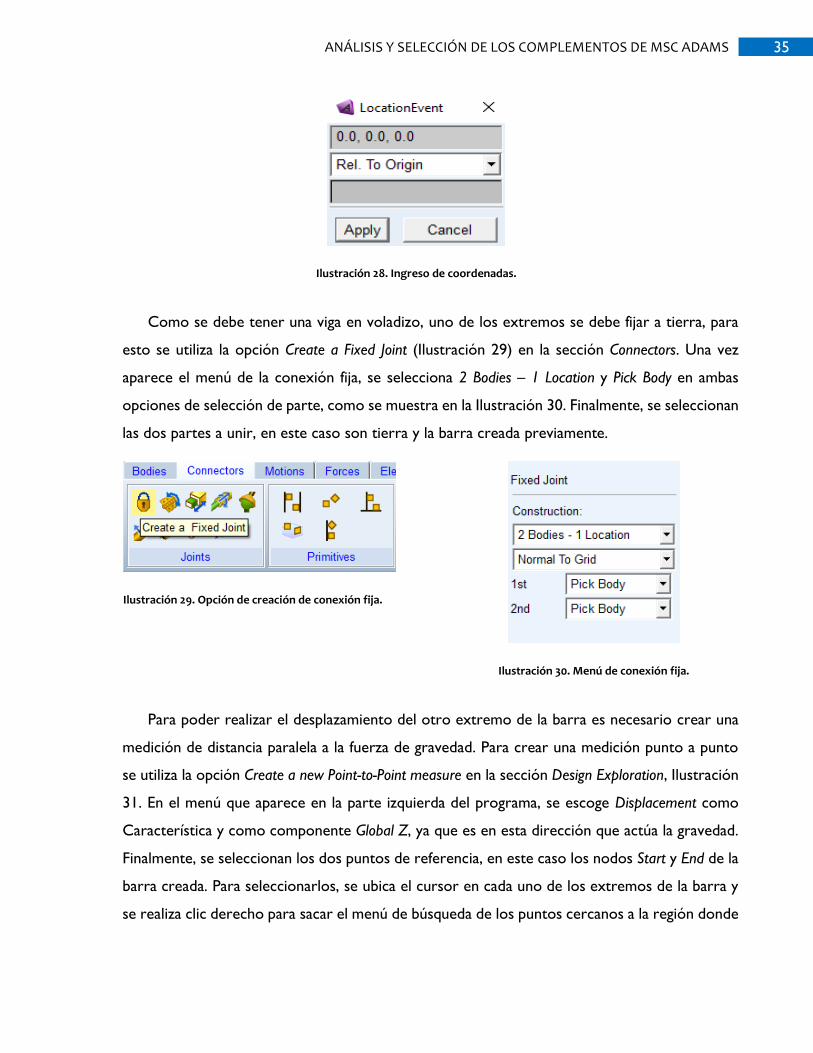
Ilustración 28. Ingreso de coordenadas.
Como se debe tener una viga en voladizo, uno de los extremos se debe fijar a tierra, para
esto se utiliza la opción Create a Fixed Joint (Ilustración 29) en la sección Connectors. Una vez
aparece el menú de la conexión fija, se selecciona 2 Bodies – 1 Location y Pick Body en ambas
opciones de selección de parte, como se muestra en la Ilustración 30. Finalmente, se seleccionan
las dos partes a unir, en este caso son tierra y la barra creada previamente.
Ilustración 29. Opción de creación de conexión fija.
Ilustración 30. Menú de conexión fija.
Para poder realizar el desplazamiento del otro extremo de la barra es necesario crear una
medición de distancia paralela a la fuerza de gravedad. Para crear una medición punto a punto
se utiliza la opción Create a new Point-to-Point measure en la sección Design Exploration, Ilustración
31. En el menú que aparece en la parte izquierda del programa, se escoge Displacement como
Característica y como componente Global Z, ya que es en esta dirección que actúa la gravedad.
Finalmente, se seleccionan los dos puntos de referencia, en este caso los nodos Start y End de la
barra creada. Para seleccionarlos, se ubica el cursor en cada uno de los extremos de la barra y
se realiza clic derecho para sacar el menú de búsqueda de los puntos cercanos a la región donde

36
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
se realizó clic; la Ilustración 32 e Ilustración 33 muestran la selección de los extremos de la
barra.
Ilustración 31. Creación de medición punto a punto.
Ilustración 32. Clic derecho sobre uno de los extremos de la barra.
Ilustración 33. Menú de búsqueda puntos cercanos región de clic.
Finalmente, saldrá un recuadro que trazará la distancia en el eje z entre estos dos puntos, lo
cual significará el desplazamiento del extremo libre y podrá ser comparado teóricamente con el
resultado obtenido en el programa MDSolids. El uso de MDSolids es única y exclusivamente
para validar el resultado obtenido en esta simulación.
La simulación se realizó únicamente con el peso de la barra, sin adicionar ninguna fuerza
extra. Para obtener el resultado en MDSolids, se aplicó una carga uniforme sobre la barra. Para
esta carga, se tuvo en cuenta que la densidad del acero 𝜌 en Adams es de 7801𝑘𝑔
𝑚3, la gravedad
𝑔 tiene un valor de 9806.65𝑚𝑚
𝑠2 y el radio 𝑟 de la sección transversal de la barra creada es de
10 𝑚𝑚; con estas condiciones es posible obtener la fuerza por unidad de longitud de la barra:

37 ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
𝑤 = 𝜌 ∗ (𝜋 ∗ 𝑟2) ∗ 𝑔 = 7801𝑘𝑔
𝑚3∗ (𝜋 ∗ 0.012) 𝑚2 ∗ 9.80665
𝑚
𝑠2= 24.02
𝑁
𝑚
Para la deflexión, el programa requiere como entrada el producto entre la inercia del área
transversal, en este caso 𝐼 =𝜋
4𝑟4, y el módulo de Young 𝐸, el cual tiene un valor de 207 𝐺𝑃𝑎.
De esta manera, este producto tiene un valor de:
𝐸𝐼 = 207 ∗ 109𝑁
𝑚2∗ (
𝜋
4∗ 0.0104) 𝑚4 = 1625.77 𝑁𝑚2
Con los datos obtenidos anteriormente, el valor teórico de deflexión de la barra en el
extremo libre es de −29.549 𝑚𝑚, como muestra la Ilustración 34.
Ilustración 34. Deflexión en el programa MDSolids.
Para la simulación en Adams, se debe correr una simulación interactiva, esta se realiza a
partir de la opción Run an Interactive Simulation en la sección Simulation (Ilustración 35).
Ilustración 35. Opción de simulación en Adams.

38
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
A partir del menú que aparece en la Ilustración 36 se debe configurar la duración y el número
de intervalos de la simulación. Para encontrar directamente el punto de equilibrio del sistema,
se utiliza la herramienta Find static equilibrium en este mismo panel de control.
Ilustración 36. Panel de control de la simulación.
Luego de realizada la simulación, se obtuvo una deflexión de −29.56 𝑚𝑚, como muestra la
Ilustración 37:
Ilustración 37. Resultados de simulación en MSC Adams View.
En comparación con el valor teórico, los valores son muy similares con una diferencia de
0.011 𝑚𝑚.

39 ANÁLISIS Y SELECCIÓN DE LOS COMPLEMENTOS DE MSC ADAMS
5.4. Selección de complemento de Adams
Con base en lo explicado anteriormente, Adams ViewFlex no permite realizar la conversión
de un cuerpo rígido complejo a cuerpo flexible, como ocurrió por parte del CAD importado de
Autodesk Inventor. Como uno de los objetivos es modelar el chasís por medio del programa
MSC Adams, Adams Flex no es una buena opción para modelar el chasís del kart eléctrico ya
que se necesitaba importarlo de un programa diferente. Finalmente, como se demostró, la
opción que converge y que modela el chasís de la mejor manera entre los complementos antes
explicados es MSC FE – Part, además, el análisis realizado con FE – Parts es de geometrías no
lineales y muestra con más precisión la deformación que se obtiene.

40
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
6. DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
En esta sección se explicará la metodología utilizada para aplicar las cargas estáticas y dinámicas
sobre el chasís. Así mismo, por cuestiones del software, fue necesario redefinir la geometría de la
sección transversal del chasís.
6.1. Geometría de la sección transversal del chasís
La geometría de la sección transversal del chasís físico es circular hueca con diámetro interno
𝑑𝑖 y externo 𝑑𝑒 de 28 𝑚𝑚 y 32 𝑚𝑚, respectivamente, es decir, un grosor 𝑡 de 2 𝑚𝑚 de pared.
Sin embargo, al modelar esta sección transversal con FE – Part, el software lanza una advertencia
que dice:
Ilustración 38. Mensaje de advertencia con sección transversal circular hueca.
De acuerdo con este mensaje, el modelo no crea geometrías con un área transversal circular
hueca y los resultados se obtendrían basados en propiedades de la sección y no como tal de la
geometría. La respuesta por parte de MSC Adams para solucionar este problema es el siguiente:
“To visualize the hollow circular cross section geometry, please try using the "External Geometry"
option to create the FE_Part. With this, it is required to import an equivalent geometry(~hollow
cylinder) to the FE_Part.”
Esta respuesta quiere decir que es necesario importar una geometría de un cilindro hueco
para poder crear la geometría necesaria en el modelo. Sin embargo, este método de creación
no es muy conveniente ya que el modelamiento del chasís en Adams se realizó por medio de
múltiples barras unidas, como se explicará detalladamente en la sección 7. MODELAMIENTO

41 DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
DEL CHASÍS EN MSC ADAMS, y esto implicaría importar la geometría de cada una de las barras
creadas.
Para poder modelar el chasís con una sección transversal circular maciza es necesario
calcular un diámetro equivalente. Al momento de deformarse las barras, la inercia debe ser la
que se mantenga constante respecto a la sección transversal circular hueca. A continuación, se
muestra el cálculo de la inercia de la sección transversal hueca:
𝐼𝑐ℎ =𝜋
64∗ (𝑑𝑒
4 − 𝑑𝑖4) =
𝜋
64∗ ((32 𝑚𝑚)4 − (28 𝑚𝑚)4) = 21300 𝑚𝑚4
Para asegurar que la deflexión de las barras del chasís sea consecuente con una sección
circular hueca, se debe calcular un diámetro que tenga una inercia igual a 21300 𝑚𝑚4:
𝐼𝑐𝑚 =𝜋
64∗ 𝑑𝑒𝑞
4 = 21300 𝑚𝑚4 → 𝑑𝑒𝑞 = 25.67 𝑚𝑚 → 𝑟𝑒𝑞 = 12.83 𝑚𝑚
Ahora bien, esta barra modelada con el diámetro equivalente encontrado no tendrá la misma
área transversal que tendría el cilindro hueco, en las ecuaciones siguientes se muestran las áreas
con cada sección transversal.:
𝐴𝑐ℎ =𝜋
4∗ (𝑑𝑒
2 − 𝑑𝑖2) =
𝜋
4∗ (322 − 282) = 188.5 𝑚𝑚2
𝐴𝑐𝑚 =𝜋
4∗ 𝑑𝑒𝑞
2 =𝜋
4∗ 25.672 = 517.36 𝑚𝑚2
Al cambiar el área transversal cambia igualmente el volumen, y asimismo la masa de la barra.
Por este motivo, se decidió crear un material que sea con las mismas propiedades del acero con
una densidad equivalente 𝜌𝑒𝑞. Para obtener esta densidad, se obtiene inicialmente la masa por
longitud de la barra hueca multiplicando la densidad del acero por el área del cilindro hueco:
𝑚𝑙 = 𝜌 ∗ 𝐴𝑐ℎ = 7801𝑘𝑔
𝑚3∗ 188.5 𝑚𝑚2 ∗ (
1 𝑚
1000 𝑚𝑚)
2
= 1.47𝑘𝑔
𝑚
Para asegurar la misma masa por longitud de la barra hueca en la barra maciza, se debe
modificar la densidad de la siguiente manera:
𝑚𝑙 = 𝜌𝑒𝑞 ∗ 𝐴𝑐𝑚 → 1.47𝑘𝑔
𝑚= 𝜌𝑒𝑞 ∗ 517.36 𝑚𝑚2 ∗ (
1 𝑚
1000 𝑚𝑚)
2
→ 𝜌𝑒𝑞 = 2842.21𝑘𝑔
𝑚3
42
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
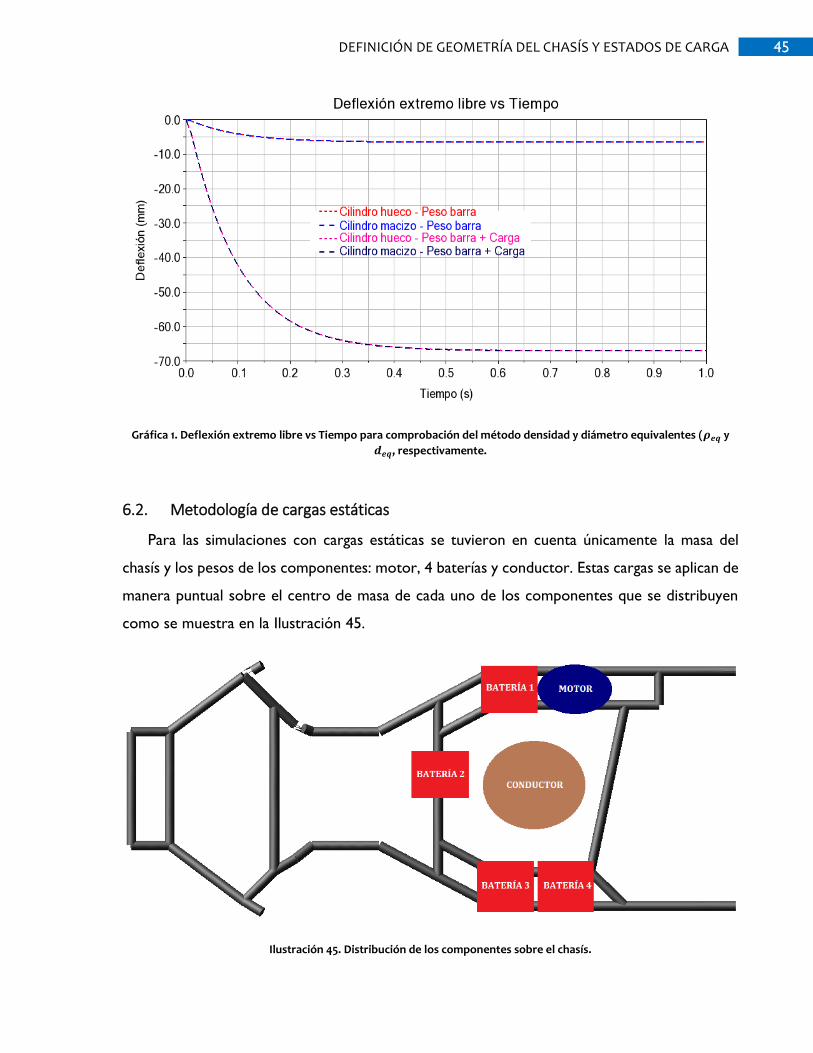
Para comprobar su funcionamiento, se realizó simulaciones con ambas áreas transversales y
densidades tanto en Adams como en MDSolids. Se realizaron 4 simulaciones en una barra de 2
metros de longitud:
a) Sección transversal circular hueca con densidad del acero, solamente se tiene en
cuenta el peso de la barra.
b) Sección transversal circular maciza con densidad equivalente, solamente se tiene en
cuenta el peso de la barra.
c) Sección transversal circular hueca con densidad del acero, se tienen en cuenta el
peso de la barra y una carga de 100 𝑁 en el extremo libre.
d) Sección transversal circular maciza con densidad equivalente, se tienen en cuenta el
peso de la barra y una carga de 100 𝑁 en el extremo libre.
Para poner la carga de 100 𝑁 se utiliza la opción Create a Force (Single-Component) Applied
Force en la sección Forces, como muestra la Ilustración 39. En el menú que aparece en la parte
izquierda del programa, se selecciona la aplicación para el cuerpo en movimiento, Body Moving,
Pick Feature en para seleccionar manualmente la dirección de aplicación de la fuerza y con
característica Constant y se ingresa el valor de −100, tal como está configurado en la Ilustración
40. Luego de realizar la configuración de la fuerza, se selecciona el cuerpo en el modelo
(Ilustración 41) seguido del extremo al que se aplicará la fuerza, como se explicó anteriormente
con la Ilustración 32 y la Ilustración 33; finalmente, se selecciona la dirección de aplicación (en
este caso debe ser positiva ya que el valor ingresado fue negativo), puede ser de cualquier marker
pero la componente debe ser la correcta, en este caso la componente en el eje z, como en la
Ilustración 42.

43 DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
Ilustración 39. Opción de creación de fuerza puntual.
Ilustración 40. Menú de creación de fuerza puntual.
Ilustración 41. Selección de cuerpo al que se aplicará la fuerza.
Ilustración 42. Selección de dirección de aplicación de la fuerza.
Para crear un material nuevo, se hace clic derecho en la sección Material del menú de
modificación de la FE – Part y se selecciona Material -> Create (Ilustración 43). En el menú
emergente se ingresa la densidad equivalente 𝜌𝑒𝑞, el módulo de Young 𝐸 y el coeficiente de
Poisson del acero (0.29), el menú de creación del acero equivalente se debe configurar como
en la Ilustración 44.

44
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 43. Creación de un nuevo material.
Ilustración 44. Menú de creación del nuevo material.
Las simulaciones se realizan como se mostró en la sección 5.3. Modelamiento del chasis con
MSC FE – Part, en la Ilustración 35 y la Ilustración 36. El resultado de las 4 simulaciones se
muestra en la Gráfica 1, donde se puede observar que la geometría propuesta con densidad y
diámetro equivalentes (𝜌𝑒𝑞 y 𝑑𝑒𝑞, respectivamente) reemplaza la geometría de sección
transversal circular hueca que no es posible modelar en Adams por medio de FE – Part. En la
gráfica se aprecia que las simulaciones a) y b) siguen la misma trayectoria y las c) y d) de igual
manera, esto indica que se puede utilizar el diámetro equivalente obtenido y cambiar la densidad
del material para simular el peso correcto del chasís en el modelo.
45 DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
Gráfica 1. Deflexión extremo libre vs Tiempo para comprobación del método densidad y diámetro equivalentes (𝝆𝒆𝒒 y
𝒅𝒆𝒒, respectivamente.
6.2. Metodología de cargas estáticas
Para las simulaciones con cargas estáticas se tuvieron en cuenta únicamente la masa del
chasís y los pesos de los componentes: motor, 4 baterías y conductor. Estas cargas se aplican de
manera puntual sobre el centro de masa de cada uno de los componentes que se distribuyen
como se muestra en la Ilustración 45.
Ilustración 45. Distribución de los componentes sobre el chasís.
46
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
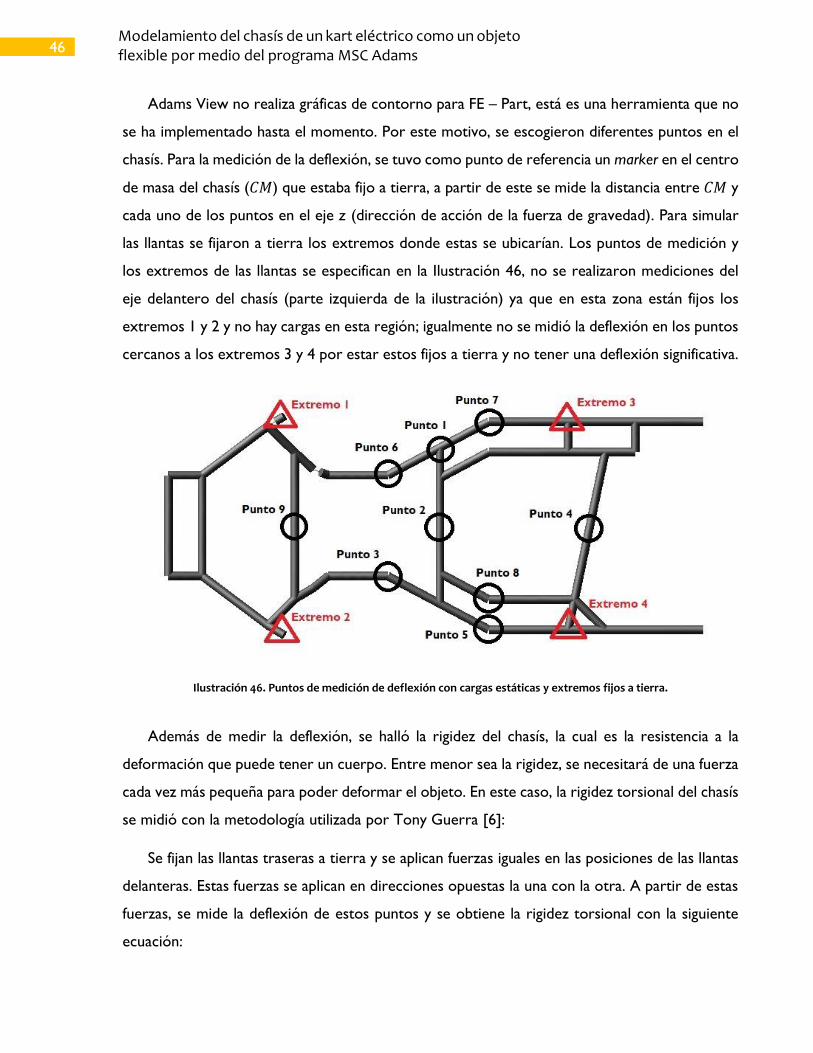
Adams View no realiza gráficas de contorno para FE – Part, está es una herramienta que no
se ha implementado hasta el momento. Por este motivo, se escogieron diferentes puntos en el
chasís. Para la medición de la deflexión, se tuvo como punto de referencia un marker en el centro
de masa del chasís (𝐶𝑀) que estaba fijo a tierra, a partir de este se mide la distancia entre 𝐶𝑀 y
cada uno de los puntos en el eje z (dirección de acción de la fuerza de gravedad). Para simular
las llantas se fijaron a tierra los extremos donde estas se ubicarían. Los puntos de medición y
los extremos de las llantas se especifican en la Ilustración 46, no se realizaron mediciones del
eje delantero del chasís (parte izquierda de la ilustración) ya que en esta zona están fijos los
extremos 1 y 2 y no hay cargas en esta región; igualmente no se midió la deflexión en los puntos
cercanos a los extremos 3 y 4 por estar estos fijos a tierra y no tener una deflexión significativa.
Ilustración 46. Puntos de medición de deflexión con cargas estáticas y extremos fijos a tierra.
Además de medir la deflexión, se halló la rigidez del chasís, la cual es la resistencia a la
deformación que puede tener un cuerpo. Entre menor sea la rigidez, se necesitará de una fuerza
cada vez más pequeña para poder deformar el objeto. En este caso, la rigidez torsional del chasís
se midió con la metodología utilizada por Tony Guerra [6]:
Se fijan las llantas traseras a tierra y se aplican fuerzas iguales en las posiciones de las llantas
delanteras. Estas fuerzas se aplican en direcciones opuestas la una con la otra. A partir de estas
fuerzas, se mide la deflexión de estos puntos y se obtiene la rigidez torsional con la siguiente
ecuación:

47 DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
𝑘 =𝐹𝑙𝑒𝑙
tan−1 (𝑧
𝑙𝑒𝑙
2
)
Donde 𝐹 es la fuerza que se aplica en cada una de las llantas delanteras, 𝑙𝑒𝑙 es la distancia
entre las llantas y 𝑧 es la deflexión que se obtiene. La Ilustración 47 muestra la manera en la que
se aplicaron las fuerzas para medir la deformación. Tony Guerra utilizó una fuerza de 4300 𝑁
en esta simulación de acuerdo con pruebas realizadas en otros trabajos con vehículos realizando
giros a una velocidad de 70𝑘𝑚
ℎ [6].
Ilustración 47. Aplicación de fuerzas para la medición de la rigidez del chasís.
6.3. Metodología de cargas dinámicas
Para simular el comportamiento del chasís con cargas dinámicas se crearon 4 llantas de
diámetro 25 𝑐𝑚 y se colocaron en los extremos especificados en la Ilustración 46, los cuatro a
la misma altura del piso. Para unirlas al chasís se utilizó la herramienta Revolute joint que se
muestra en la Ilustración 48, se elige Pick Geometry Feature, se seleccionan los dos cuerpos a unir,
luego el marker donde se unen los cuerpos y finalmente la dirección de giro. El menú que aparece
al lado izquierdo del programa debe configurarse como se muestra en la Ilustración 49.

48
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 48. Herramienta para crear una unión de rotación.
Ilustración 49. Menú de unión de rotación.
Se debe tener en cuenta que, como ya se están aplicando las uniones rotacionales, se deben
desactivar las uniones fijas puestas para la simulación de cargas estáticas. Para asegurar que el
vehículo se podía tener desplazamientos en el eje z sin caer por acción de la gravedad, se creó
un objeto que funcionara como piso. Este objeto se creó con la herramienta Box en la sección
Bodies, se especificaron las dimensiones suficientes para cubrir toda el área del chasís. Este se
fijó a tierra por medio de una unión fija (Ilustración 29) y se establecieron contactos entre las
cuatro llantas y el piso. El contacto se crea por medio de la herramienta ubicada en la sección
Forces->Special Forces, Ilustración 50. En la ventana emergente que aparece, se seleccionan los
cuerpos que tendrán el contacto I Solid(s) y J Solid(s) haciendo clic derecho sobre el espacio en
blanco.
Ilustración 50. Herramienta de contacto.

49 DEFINICIÓN DE GEOMETRÍA DEL CHASÍS Y ESTADOS DE CARGA
Se simuló con dos cargas dinámicas: un impacto y una fuerza sinusoidal. Para el caso del
impacto, se realiza la prueba con el kart a 50𝑘𝑚
ℎ acercándose a una piedra de 10 𝑚𝑚 de alto,
esta piedra se representa por medio de una caja. Se mide la fuerza del impacto y se analizan los
desplazamientos de los puntos de la Ilustración 46 en el eje z.
Por otro lado, también se analiza únicamente la deflexión del chasís fijando tres de las llantas
(dos traseras y delantera derecha) y realizando el mismo impacto en el extremo 2 del chasís.
Estas dos pruebas se realizan con el fin de conocer, por un lado, qué tanto se eleva el chasís y
por el otro la deflexión al momento del impacto.
La fuerza sinusoidal se analizó con diferentes frecuencias y una amplitud igual a la fuerza de
impacto. Para aplicar una fuerza sinusoidal, se aplica la fuerza desde la sección Forces -> Applied
Forces -> Create a Force (Single-Component) Applied Force (Ilustración 39). En el menú de
modificación, en la opción Function se oprime el botón que aparece al lado derecho del espacio
en blanco (encerrado en rojo en la Ilustración 51). Una vez en la ventana de creación de función
(Ilustración 52), se ingresa la siguiente función, donde 𝐴 es la amplitud que debe ser reemplazada
por el valor de la fuerza que se encontró en el impacto y 𝑤 es la frecuencia de oscilación que se
reemplaza por diferentes valores.
𝐴 ∗ sin (𝑤 ∗ 𝑡𝑖𝑚𝑒)
Ilustración 51. Modificación de fuerza, ingreso de función.

50
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 52. Creación de función.
Luego de aplicada la fuerza, se midió la deflexión de los puntos de referencia en la Ilustración
46.

51 MODELAMIENTO DEL CHASÍS EN MSC ADAMS
7. MODELAMIENTO DEL CHASÍS EN MSC ADAMS
Al momento de modelar el chasís utilizando FE – Part solamente se pueden crear cilindros y no
figuras complejas. Por esta razón, fue necesario crear múltiples partes unidas entre sí. Para las uniones
se utilizaron bujes.
Previamente al modelo del chasís se realizaron diferentes pruebas con dos barras unidas, de 2
metros y 1 metro de longitudes, esto con el fin de realizar simulaciones comparados con una barra
completa de 3 metros y comprobar si el comportamiento de las barras unidas es consecuente con el
de la barra completa.
7.1. Uniones
Para la creación de bujes se utiliza la herramienta Bushing en la sección Forces (Ilustración
53) y en el menú que aparece en la parte izquierda del programa se selecciona las opciones 2
Bod-1 Loc y Normal to Grid, en este caso no se selecciona la orientación ya que en todas las
direcciones posee las mismas propiedades. En la sección Properties del menú se ingresa la rigidez
traslacional (𝐾) y rotacional (𝐾𝑇), para calcular estas se utilizan las siguientes ecuaciones del
libro Diseño en ingeniería mecánica de Shigley [17]:
𝐾 =𝐴𝑐ℎ𝐸
𝑙=
1.885 ∗ 10−4𝑚2 ∗ 207 ∗ 109 𝑁𝑚2
0.01 𝑚= 3.90 ∗ 109
𝑁
𝑚
𝐾𝑇 =𝐺𝐽
𝑙=
𝐺 ∗ 𝜋 ∗𝑑𝑒
4 − 𝑑𝑖4
32𝑙
=(79.3 ∗ 109 𝑁
𝑚2) ∗ 𝜋 ∗(0.032 𝑚)4 − (0.028 𝑚)4
320.01 𝑚
= 3.38 ∗ 105 𝑁𝑚
Donde 𝐺 es el módulo de rigidez del acero, 𝐽 el factor geométrico de la barra y 𝑙 la longitud
de la unión, se decidió tomar 10 𝑚𝑚 ya que una soldadura tiene aproximadamente este valor.
En estas ecuaciones se utilizan los diámetros y el área del cilindro hueco porque se deben
mantener las propiedades de este en el modelo, el diámetro y la densidad equivalente se utilizan
únicamente para crear la geometría y ajustar el peso real del chasís. El menú debe estar
configurado como en la Ilustración 54. Finalmente se seleccionan las dos partes a unir y la

52
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
localización es el punto de unión, ya sea el nodo final de la primera barra o el nodo inicial de la
segunda barra.
Ilustración 53. Herramienta Create a Bushing.
Ilustración 54. Configuración para la creación de bujes. Es importante escribir las unidades específicas ya que el
programa está configurado en milímetros y no en metros.
Finalmente, las barras quedaron modeladas así:
Ilustración 55. Barras unidas (arriba) y barra completa (abajo) modeladas. El símbolo rojo de las barras unidas es el buje y los símbolos azules en los extremos izquierdos de las barras son uniones fijas simulando que las barras están
empotradas en la pared.
Simulando las dos barras se obtiene el siguiente resultado:

53 MODELAMIENTO DEL CHASÍS EN MSC ADAMS
Ilustración 56. Animación de la simulación de las barras unidas y la completa en el tiempo t= 2 s.
Gráfica 2. Deflexión extremo libre vs Tiempo de las barras unidas en comparación con la barra completa teniendo en cuenta solamente el peso de las barras.
En la Ilustración 56 se puede evidenciar que la unión funcionó adecuadamente y simula de
manera coherente la barra completa. Aunque en la Gráfica 2 se muestra que las barras tienen
un comportamiento similar, las barras unidas tienen una deflexión mayor en 1 𝑚𝑚. A pesar de
que no es gran diferencia, esta podría aumentar al momento de aplicar una carga sobre las barras.
En simulaciones realizadas con una carga de 100 𝑁 en el extremo libre, la deflexión en ambos
casos fue de −220.6 𝑚𝑚 para las barras unidas y −177.0 𝑚𝑚 para la barra completa, en el que
ya habría una diferencia de 43.6 𝑚𝑚.
El problema de la diferencia de deflexiones se debe al número de nodos con los que se creó
cada una de las FE – Part. A continuación, se muestra el análisis de convergencia realizado al
chasís.

54
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
7.2. Análisis de convergencia
En un análisis de elementos finitos, los nodos son aquellos puntos en un cuerpo sobre los
que se realiza cualquier tipo de medición, ya sea deflexión, esfuerzos, entre otros. En este caso,
se busca analizar la deflexión de un cuerpo compuesto por múltiples barras, y cada una de esta
creada con base en una malla conformada por cierta cantidad de nodos. Cada nodo provee
información que se calcula respecto a sus nodos vecinos, por esta razón, se necesita discretizar
el cuerpo con una mayor cantidad de nodos. Sin embargo, hay un número de nodos suficiente
para que el análisis converja, y así se incremente el número de estos, el resultado no variará
significativamente y se mantendrá en una tolerancia específica.
Para la discretización del cuerpo, en Adams es más sencillo indicar el número de nodos que
conformarán dicho cuerpo y no la distancia entre estos. Para encontrar el número de nodos se
usará la unidad 𝑛𝑜𝑑𝑜𝑠/𝑚𝑒𝑡𝑟𝑜, en la que cada barra que compone el chasís tendrá determinados
nodos dependiendo de su longitud. De esta manera se empezó analizando con una cantidad de
𝑛𝑜𝑑𝑜𝑠/𝑚𝑒𝑡𝑟𝑜 y se fue aumentando la cantidad de estos hasta llegar a un punto de convergencia.
Se analizó la deflexión en tres puntos sobre el chasís que se marcan en la Ilustración 57. El
chasís finalmente se conforma por 30 FE – Part que fueron unidas en sus extremos por medio
de bushings en sus respectivas localizaciones para formar la geometría del chasís como un solo
cuerpo.
Ilustración 57. Puntos de análisis de deflexión.
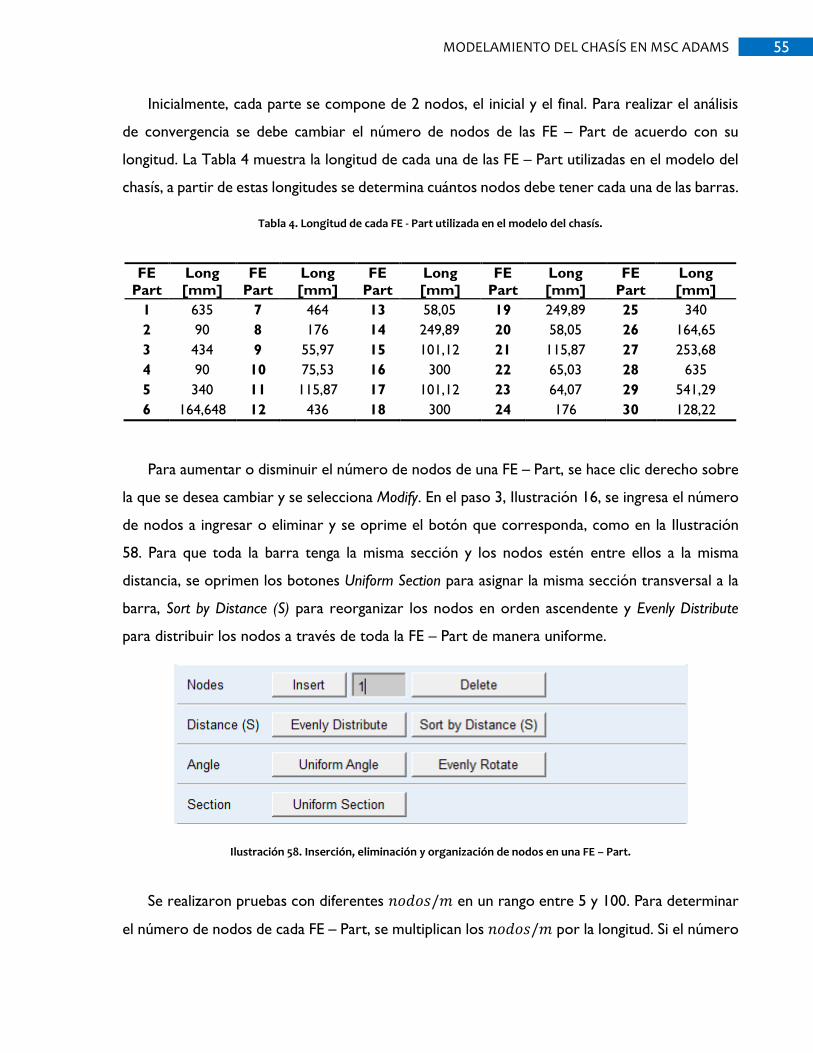
55 MODELAMIENTO DEL CHASÍS EN MSC ADAMS
Inicialmente, cada parte se compone de 2 nodos, el inicial y el final. Para realizar el análisis
de convergencia se debe cambiar el número de nodos de las FE – Part de acuerdo con su
longitud. La Tabla 4 muestra la longitud de cada una de las FE – Part utilizadas en el modelo del
chasís, a partir de estas longitudes se determina cuántos nodos debe tener cada una de las barras.
Tabla 4. Longitud de cada FE - Part utilizada en el modelo del chasís.
FE
Part
Long
[mm]
FE
Part
Long
[mm]
FE
Part
Long
[mm]
FE
Part
Long
[mm]
FE
Part
Long
[mm]
1 635 7 464 13 58,05 19 249,89 25 340
2 90 8 176 14 249,89 20 58,05 26 164,65
3 434 9 55,97 15 101,12 21 115,87 27 253,68
4 90 10 75,53 16 300 22 65,03 28 635
5 340 11 115,87 17 101,12 23 64,07 29 541,29
6 164,648 12 436 18 300 24 176 30 128,22
Para aumentar o disminuir el número de nodos de una FE – Part, se hace clic derecho sobre
la que se desea cambiar y se selecciona Modify. En el paso 3, Ilustración 16, se ingresa el número
de nodos a ingresar o eliminar y se oprime el botón que corresponda, como en la Ilustración
58. Para que toda la barra tenga la misma sección y los nodos estén entre ellos a la misma
distancia, se oprimen los botones Uniform Section para asignar la misma sección transversal a la
barra, Sort by Distance (S) para reorganizar los nodos en orden ascendente y Evenly Distribute
para distribuir los nodos a través de toda la FE – Part de manera uniforme.
Ilustración 58. Inserción, eliminación y organización de nodos en una FE – Part.
Se realizaron pruebas con diferentes 𝑛𝑜𝑑𝑜𝑠/𝑚 en un rango entre 5 y 100. Para determinar
el número de nodos de cada FE – Part, se multiplican los 𝑛𝑜𝑑𝑜𝑠/𝑚 por la longitud. Si el número

56
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
de nodos era menor a 2, igualmente se configuraban las partes con su respectivo nodo inicial y
nodo final, ya que una FE – Part se compone de mínimo estos dos nodos. Para cada prueba se
midió la deflexión en los tres puntos anteriormente especificados, los cuales fueron
seleccionados en ambos extremos y en el centro del chasís, de acuerdo con el trabajo de Tony
Guerra, este último es el que obtiene una mayor deflexión. Para realizar mediciones se utilizó la
herramienta Point-to-Point de la Ilustración 31 donde se seleccionó el centro de masa como punto
fijo, la deflexión es la diferencia entre las distancias inicial y final en el eje 𝑧.
Gráfica 3. Deflexión vs Nodos/m del Punto 1 en el chasís.
Gráfica 4. Deflexión vs Nodos/m del Punto 2 en el chasís.
-0,82
-0,8
-0,78
-0,76
-0,74
-0,72
-0,7
-0,68
-0,66
-0,645 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95100
Deflexió
n [
mm
]
Nodos/m
Deflexión vs Nodos/m
Punto 1
-0,45
-0,44
-0,43
-0,42
-0,41
-0,4
-0,39
-0,38
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95100
Deflexió
n [
mm
]
Nodos/m
Deflexión vs Nodos/m
Punto 2

57 MODELAMIENTO DEL CHASÍS EN MSC ADAMS
Gráfica 5. Deflexión vs Nodos/m del Punto 3 en el chasís.
La Gráfica 3, Gráfica 4 y Gráfica 5 muestran los resultados obtenidos luego las diferentes
pruebas. Como se puede observar, entre menos 𝑛𝑜𝑑𝑜𝑠/𝑚 se tiene una deflexión menos precisa
y mayor será la incertidumbre, por el contrario, entre más 𝑛𝑜𝑑𝑜𝑠/𝑚 el resultado tiende a
estabilizarse y a un mismo valor de la deflexión. Sin embargo, entre mayor número de nodos,
menos eficiente será la simulación, es decir, tomará más tiempo realizarla ya que se tiene un
manejo mayor de información. Por esta razón se debe encontrar un equilibrio entre menor
incertidumbre y mayor eficiencia de la simulación. En el caso del chasís se decidió modelarlo con
60 𝑛𝑜𝑑𝑜𝑠/𝑚 ya que en las gráficas es el punto donde la curvas comienzan a converger.
Finalmente, cada barra está conformada por un número determinado de nodos, dependiendo su
longitud. La Tabla 5 muestra el número de nodos de cada FE – Part con la que se modeló el
chasís.
Tabla 5. Número de nodos por cada FE - Part.
FE
Part # Nodos
FE
Part # Nodos
FE
Part # Nodos
FE
Part # Nodos
FE
Part # Nodos
1 38 7 28 13 3 19 15 25 20
2 5 8 11 14 15 20 3 26 10
3 26 9 3 15 6 21 7 27 15
4 5 10 5 16 18 22 4 28 38
5 20 11 7 17 6 23 4 29 32
6 10 12 26 18 18 24 11 30 8
-0,04
-0,038
-0,036
-0,034
-0,032
-0,03
-0,028
-0,026
-0,024
-0,022
-0,02
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95100
Deflexió
n [
mm
]
Nodos/m
Deflexión vs Nodos/m
Punto 3

58
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
8. RESULTADOS
Ilustración 46 (Repetición). Puntos de medición de deflexión con cargas estáticas y extremos fijos a tierra.
Las pruebas realizadas con cargas estáticas arrojaron los resultados de cada uno de los puntos de
la Ilustración 46 en la Gráfica 6. La deflexión específica de cada uno de estos puntos se encuentra en la
Tabla 6.
Gráfica 6. Distancia desde el centro de masa del chasís a los respectivos puntos de medición.
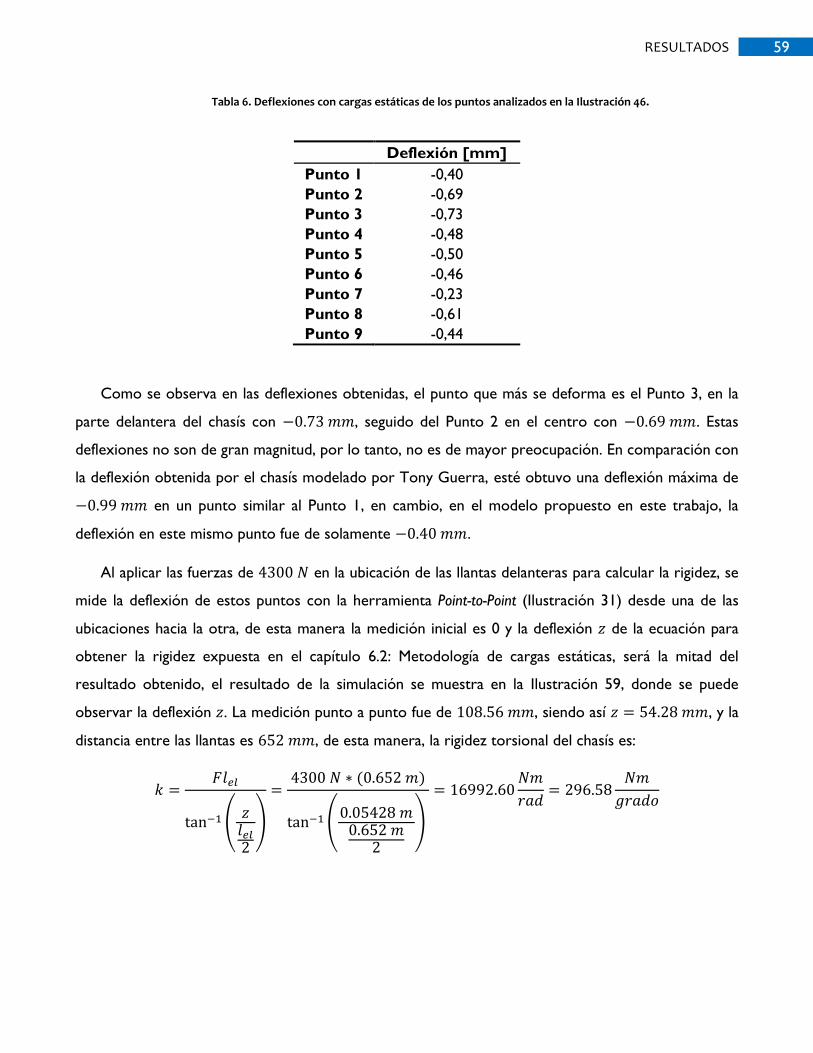
59 RESULTADOS
Tabla 6. Deflexiones con cargas estáticas de los puntos analizados en la Ilustración 46.
Deflexión [mm]
Punto 1 -0,40
Punto 2 -0,69
Punto 3 -0,73
Punto 4 -0,48
Punto 5 -0,50
Punto 6 -0,46
Punto 7 -0,23
Punto 8 -0,61
Punto 9 -0,44
Como se observa en las deflexiones obtenidas, el punto que más se deforma es el Punto 3, en la
parte delantera del chasís con −0.73 𝑚𝑚, seguido del Punto 2 en el centro con −0.69 𝑚𝑚. Estas
deflexiones no son de gran magnitud, por lo tanto, no es de mayor preocupación. En comparación con
la deflexión obtenida por el chasís modelado por Tony Guerra, esté obtuvo una deflexión máxima de
−0.99 𝑚𝑚 en un punto similar al Punto 1, en cambio, en el modelo propuesto en este trabajo, la
deflexión en este mismo punto fue de solamente −0.40 𝑚𝑚.
Al aplicar las fuerzas de 4300 𝑁 en la ubicación de las llantas delanteras para calcular la rigidez, se
mide la deflexión de estos puntos con la herramienta Point-to-Point (Ilustración 31) desde una de las
ubicaciones hacia la otra, de esta manera la medición inicial es 0 y la deflexión 𝑧 de la ecuación para
obtener la rigidez expuesta en el capítulo 6.2: Metodología de cargas estáticas, será la mitad del
resultado obtenido, el resultado de la simulación se muestra en la Ilustración 59, donde se puede
observar la deflexión 𝑧. La medición punto a punto fue de 108.56 𝑚𝑚, siendo así 𝑧 = 54.28 𝑚𝑚, y la
distancia entre las llantas es 652 𝑚𝑚, de esta manera, la rigidez torsional del chasís es:
𝑘 =𝐹𝑙𝑒𝑙
tan−1 (𝑧
𝑙𝑒𝑙
2
)
=4300 𝑁 ∗ (0.652 𝑚)
tan−1 (0.05428 𝑚
0.652 𝑚2
)
= 16992.60𝑁𝑚
𝑟𝑎𝑑= 296.58
𝑁𝑚
𝑔𝑟𝑎𝑑𝑜
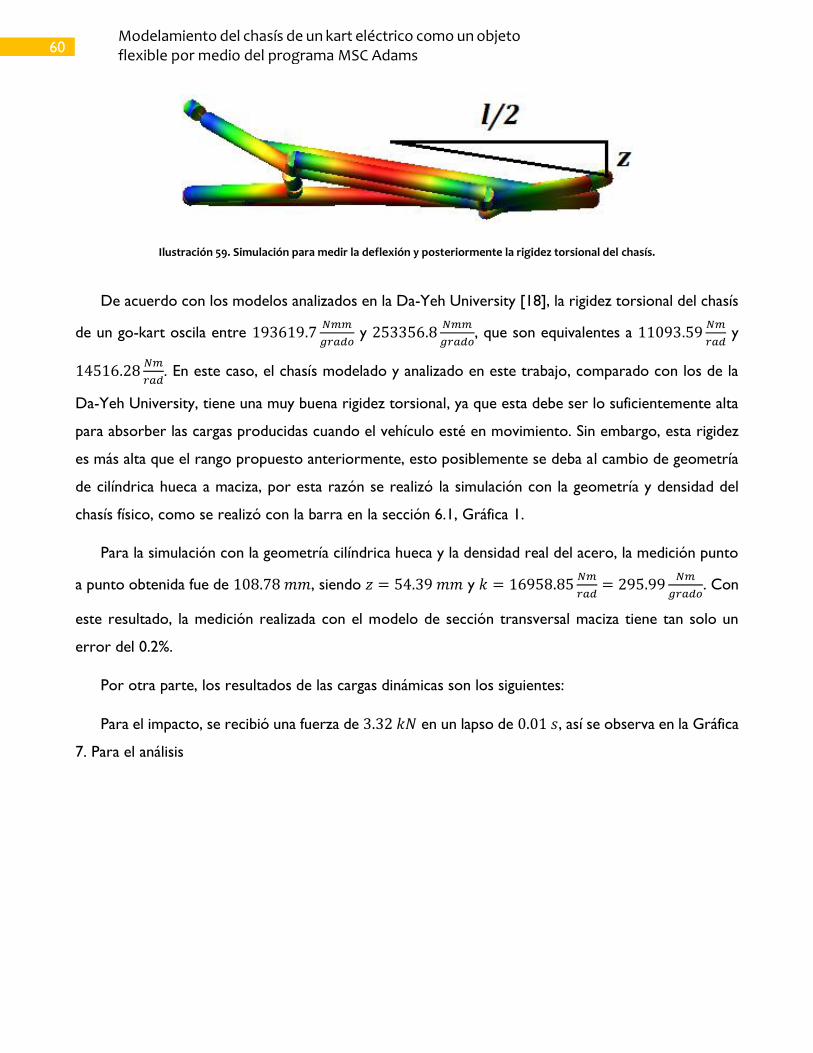
60
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Ilustración 59. Simulación para medir la deflexión y posteriormente la rigidez torsional del chasís.
De acuerdo con los modelos analizados en la Da-Yeh University [18], la rigidez torsional del chasís
de un go-kart oscila entre 193619.7𝑁𝑚𝑚
𝑔𝑟𝑎𝑑𝑜 y 253356.8
𝑁𝑚𝑚
𝑔𝑟𝑎𝑑𝑜, que son equivalentes a 11093.59
𝑁𝑚
𝑟𝑎𝑑 y
14516.28𝑁𝑚
𝑟𝑎𝑑. En este caso, el chasís modelado y analizado en este trabajo, comparado con los de la
Da-Yeh University, tiene una muy buena rigidez torsional, ya que esta debe ser lo suficientemente alta
para absorber las cargas producidas cuando el vehículo esté en movimiento. Sin embargo, esta rigidez
es más alta que el rango propuesto anteriormente, esto posiblemente se deba al cambio de geometría
de cilíndrica hueca a maciza, por esta razón se realizó la simulación con la geometría y densidad del
chasís físico, como se realizó con la barra en la sección 6.1, Gráfica 1.
Para la simulación con la geometría cilíndrica hueca y la densidad real del acero, la medición punto
a punto obtenida fue de 108.78 𝑚𝑚, siendo 𝑧 = 54.39 𝑚𝑚 y 𝑘 = 16958.85𝑁𝑚
𝑟𝑎𝑑= 295.99
𝑁𝑚
𝑔𝑟𝑎𝑑𝑜. Con
este resultado, la medición realizada con el modelo de sección transversal maciza tiene tan solo un
error del 0.2%.
Por otra parte, los resultados de las cargas dinámicas son los siguientes:
Para el impacto, se recibió una fuerza de 3.32 𝑘𝑁 en un lapso de 0.01 𝑠, así se observa en la Gráfica
7. Para el análisis

61 RESULTADOS
Gráfica 7. Fuerza de impacto vs Tiempo.
Sin fijar los extremos a tierra, se aplicó el impacto anterior sobre el chasís directamente y sin llanta
de por medio. El resultado obtenido es el siguiente:
Ilustración 60. Simulación del impacto sin los extremos fijos a tierra.

62
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
Gráfica 8. Desplazamiento en el eje z vs Tiempo durante el impacto de los puntos de referencia.
Como se esperaba, los puntos en la parte delantera del chasís serían los que más se desplazarían y
la trasera no tendría grandes desplazamientos. De hecho, el Punto 4, que es la barra trasera que
atraviesa transversalmente el chasís de manera diagonal, se desplaza 3.37 𝑚𝑚 en dirección negativa al
resto del chasís. Esto puede ser por la transferencia de cargas al momento del impacto. El mayor
desplazamiento fue alcanzado por el Extremo 1 con 36 𝑚𝑚, seguido del Extremo 2 con 35.57 𝑚𝑚.
Para la segunda parte de la prueba de impacto, con los tres extremos fijos a tierra y aplicando la
misma fuerza que se muestra en la Gráfica 7, se obtienen las deflexiones de los puntos de referencia en
el chasís, estos se exponen en la siguiente gráfica:

63 RESULTADOS
Gráfica 9. Deflexión vs Tiempo durante el impacto (3 llantas fijas).
En esta prueba, se puede observar que el punto que mayor deflexión tiene es el Punto 9 que está
en el centro de la barra más cercana al eje de las llantas delanteras con 2.67 𝑚𝑚. Por otro lado, es
posible identificar que el Punto 4 no se ve afectado por el impacto y se deforma solamente por cargas
estáticas.
La prueba sinusoidal se realizó con una frecuencia de 𝑤 = 3 𝑟𝑎𝑑 para observar el comportamiento
del chasís. A continuación, se muestran las deflexiones de los puntos de referencia:
Gráfica 10. Deflexión vs Tiempo, frecuencia 𝒘 = 𝟑.

64
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
En este caso que se tiene una fuerza sinusoidal, el punto con mayor deflexión, al igual que con solo
cargas estáticas, es el Punto 3 con una deflexión máxima de 7.23 𝑚𝑚. Respecto a los puntos que están
en la parte trasera del chasís, se puede observar que, contrario a un impacto, en esta prueba sí se ven
afectados. Por ejemplo, el Punto 4 no tiene grandes deflexiones, sin embargo, sí alcanza a tener un leve
comportamiento sinusoidal al igual que los otros puntos.
Con estas simulaciones, tanto con cargas estáticas y dinámicas, se demuestra que se tienen cambios
que pueden afectar de manera importante la dinámica del chasís. Por ejemplo, en el caso de la prueba
con un impacto sin ninguna llanta fija a tierra, luego de que el vehículo cae después de elevarse por casi
40 𝑚𝑚, se puede observar que se ha girado como muestra la Ilustración 61. Sin tener en cuenta el
chasís flexible, no se hubiera tenido este giro como resultado, o al menos no tan pronunciado como se
evidencia.
Ilustración 61. Giro de chasís luego de prueba de impacto.
Por otro lado, como se evidencia en el resultado de la prueba con una fuerza sinusoidal, la diferencia
entre la deflexión de un punto respecto a otro es hasta de 10 𝑚𝑚 o más, esto no se presencia en un
modelo completamente rígido.

65 CONCLUSIÓN
9. CONCLUSIÓN
El objetivo principal de este proyecto es modelar el chasís del kart eléctrico utilizado en la
Universidad de los Andes como un objeto flexible y no rígido. De acuerdo con MSC, incluir un chasís
flexible en el análisis de un go-kart cambia dramáticamente la dinámica del vehículo completo, no hacerlo
puede traer como consecuencia un error del 100% en la estimación de la aceleración lateral [19].
Teniendo en cuenta lo anterior, se logró modelar de manera correcta el chasís del kart eléctrico,
solucionando los múltiples problemas de geometría, manejo del software, entre otros, y probando el
correcto funcionamiento de la metodología utilizada para el modelamiento.
Aunque el chasís modelado no es exactamente el real en cuanto a geometría y algunas propiedades,
el modelo que se presenta en este trabajo es una representación bastante cercana al chasís físico y es
apto para el uso en el trabajo a seguir sin grandes variaciones. La interfaz gráfica del software es
necesaria para que la persona que está utilizando el modelo pueda entender con mayor facilidad los
resultados. Por este motivo, fue necesario crear una geometría equivalente que permite la visualización
de la dinámica del modelo sin cambiar esta última.
En este proyecto se modeló un chasís que logra superar los obstáculos computacionales, como por
ejemplo no crear interfaz gráfica a cilindros huecos, y tiene un error bastante bajo en cuanto a los
efectos dinámicos del chasís con la geometría real.
Por otro lado, el análisis de contornos no es una función vital de las simulaciones y el modelo, lo
realmente importante es, nuevamente, que se afecte la dinámica del vehículo al momento de modelarlo
completamente con todos sus subsistemas y no solo el chasís. Teniendo en cuenta esto, el modelo
realizado en este proyecto es una muy buena representación del chasís físico ya que, incluso uniendo
múltiples partes, logra hacer más realistas las simulaciones.
66
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
10. TRABAJO FUTURO
• Acople del chasís modelado en este proyecto con los otros subsistemas del kart eléctrico.
• Realizar más simulaciones teniendo en cuenta otras situaciones dinámicas como curvas,
aceleraciones y desaceleraciones lineales.
• Ajustar las uniones propuestas en este proyecto (bujes) para simular las uniones de soldadura
en el chasís físico.
• Modelar el chasís con otros tipos de uniones como vigas sin masa.
• Si se requiere el análisis de contornos o modelar el chasís como una sola parte, se puede modelar
el chasís en un programa de análisis de elementos finitos y luego importarlo por medio de Adams
Flex.

67 REFERENCIAS
11. REFERENCIAS
[1] G. Genta y L. Morello, The Automotive Chassis: Volume 1: Component Design, Springer
Science & Business Media, 2008.
[2] J. M. Alonso Pérez, Técnicas del automóvil. Chasís, Paraninfo, 2008.
[3] G. Franck, S. Gennaro, B. Lonardi, J. Eichhorn y A. Bruno, Análisis Dinámico de un Chasís
de Semirremolque de Servicio Pesado, Tandil, Argentina: Asociación Argentina de Mecánica
Computacional, 2009.
[4] F. Salazar González, «Análisis de un Kart de Competición y de sus Componentes,»
Zaragoza, España, 2011.
[5] F. Rivera Osorio, «Diseño, Construcción y Caracterización de un Kart Eléctrico,» Bogotá,
Colombia, 2016.
[6] T. Guerra Sepúlveda, «Diseño de un frame para kart eléctrico,» Bogotá, Colombia, 2018.
[7] M. Hanif Mat y A. R. Ab. Ghani, «Design and Analysis of ‘Eco’ Car Chassis,» Procedia
Engineering, vol. 41, pp. 1756-1760, 2012.
[8] L. D. Giraldo Rojas, «Análisis y Modelado Dinámico de un Vehículo sin Suspensión (Kart),»
Bogotá, Colombia, 2003.
[9] G. Mirone, «Multi-body Elastic Simulation of a Go-Kart: Correlation Between Fram
Stiffness and Dynamic Performance,» International Journal of Automotive Technology, vol. 11, nº
4, pp. 461-469, 2010.
[10] D. S. Aguado, «Diseño y análisis de un chasis de kart de competición,» Madrid, 2014.
[11] MSC Software, Adams Tutorial Kit for Mechanical Engineering Courses.
[12] MSC Software, Adams ViewFlex User's Guide, 2019.

68
Modelamiento del chasís de un kart eléctrico como un objeto flexible por medio del programa MSC Adams
[13] MSC Software, Welcome to Adams/Flex.
[14] MSC Software, Getting Started Using FE Parts, 2017.
[15] MSC Software, Adams 2018.1 Help, 2018.
[16] J. Mikler A., «Construction of a Computational Model of a Go-Kart for Dynamic Analysis,»
Bogotá, 2018.
[17] R. G. Budynas y J. K. Nisbett, Diseño en ingeniería mecánica de Shigley, Novena ed.,
México D.F.: Mc Graw Hill, 2012.
[18] C. Liang, H. Yu y C. Wu, «A study on torsional stiffness of the competition go-kart frame,»
Computer Aided Optimum Design in Engineering, vol. X, pp. 189-198, 2007.
[19] MSC Software Corporation, «MSC Software,» 2002. [En línea]. Available:
http://www.mscsoftware.co.kr/upfile/pro_pdf/ADAMS%20Flex_EE_R9.pdf. [Último acceso:
18 Mayo 2019].