modeling and control of the output current of a reformed ... · pdf filemodeling and control...
TRANSCRIPT

ww.sciencedirect.com
i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1
Available online at w
ScienceDirect
journal homepage: www.elsevier .com/locate/he
Modeling and control of the output current of aReformed Methanol Fuel Cell system
Kristian Kjær Justesen a,*, Søren Juhl Andreasen a, Sivakumar Pasupathi b,Bruno G. Pollet b
a Department of Energy Technology, Aalborg University, Pontoppidanstræde 101, 9220 Aalborg East, Denmarkb HySa Systems, University of The Western Cape, Robert Sobukwe Road, Bellville, Cape Town, 7535, South Africa
a r t i c l e i n f o
Article history:
Received 25 June 2015
Received in revised form
19 September 2015
Accepted 2 October 2015
Available online 29 October 2015
Keywords:
Reformed Methanol Fuel Cell
Fuel cell modeling
Fuel cell control
System output current control
HTPEM fuel cells
System identification
* Corresponding author. Fax: þ45 9815 1411.E-mail addresses: [email protected] (K.K. Jus
asystems.org (B.G. Pollet).http://dx.doi.org/10.1016/j.ijhydene.2015.10.00360-3199/Copyright © 2015, Hydrogen Ener
a b s t r a c t
In this work, a dynamic Matlab SIMULINK model of the relationship between the fuel cell
current set point of a Reformed Methanol Fuel Cell system and the output current of the
system is developed. The model contains an estimated fuel cell model, based on a polar-
ization curve and assumed first order dynamics, as well as a battery model based on an
equivalent circuit model and a balance of plant power consumption model. The models are
tuned with experimental data and verified using a verification data set. The model is used
to develop an output current controller which can control the charge current of the battery.
The controller is a PI controller with feedforward and anti-windup. The performance of the
controller is tested and verified on the physical system.
Copyright © 2015, Hydrogen Energy Publications, LLC. Published by Elsevier Ltd. All rights
reserved.
Introduction
PEM Fuel cells are receiving a lot of interest, because they
provide a potentially cleaner and more efficient alternative to
present energy conversion technologies [1]. They do, however,
have a problem with impractical and energy consuming fuel
storage when operated on pure hydrogen, either under high
pressure or on liquid form cooled down to below �253 [�C] [2].One possible solution to this problem is to use a liquid fuel as a
hydrogen carrier and reform it into a hydrogen rich gas as it is
needed.
tesen), [email protected] (S.J.
06gy Publications, LLC. Publ
One system which uses this method is the H3 350
Reformed Methanol Fuel Cell (RMFC) module from Serenergy
A/S, which is the subject of this work and depicted in Fig. 1.
Themodule has a nominal output power of 350 [W], a rated
output current of 16.5 [A] at 21 [V] and has a volume of 27 [L].
The fuel of the H3 350 module is a 60/40 vol % mixture of
methanol andwater, which is evaporated and steam reformed
into a hydrogen rich gas which is used in a HTPEM fuel cell. A
HTPEM fuel cell is used because of its high tolerance to carbon
monoxide in its fuel [4] [5].
The anode waste gas of the fuel cell is used in a catalytic
burner to supply process heat for the reformer, and the
Andreasen), [email protected] (S. Pasupathi), bgpollet@hys-
ished by Elsevier Ltd. All rights reserved.

Nomenclature
Ibat battery current
Vbat battery voltage
Vp parallel voltage
Rp parallel resistance
Cp parallel capacitance
Vs series voltage
Rs series resistance
VOC open circuit voltage
Vimp impedance voltage drop
PBOP balance of plant power consumption
Pheater electric heater power consumption
Pexcess auxiliary power consumption
IFC fuel cell current
VFC fuel cell voltage
VFC RAW fuel cell voltage without dynamic component
b1þ2 and a1 parameters for fitting
VFC fuel cell voltage
w vector of unknown parameters for fitting
f explanatory variable, matrix of data for fitting
ε residual error
VFC fuel cell voltage
J objective function for optimizationbw estimate of unknown parameter after fitting
Kp controllers proportional gain
Ki controllers integral gain
KAW controllers anti-windup gain
Fig. 2 e Concept drawing of the fuel flow through a H3 350
module from Serenergy.
i n t e rn a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 116522
cathode exhaust from the fuel cell is used to supply heat for
the evaporation of the fuel. The flows between the system
components are passed through a heat exchanger to even out
the temperatures of the flows. Fig. 2 shows a diagram of the
components and flows of a Serenergy H3 350 v1.6.
A more detailed description, and a system level thermal
model, of such a system can be found in Ref. [6]. A similar
system is described in Ref. [7], another system with a water
cooled fuel cell stack and water recovery system is described
in Refs. [8], and [9] describes a system which runs on GTL
Fig. 1 e Picture of a Serenus H3 350 from Serenergy [3].
diesel and uses a water gas shift gas cleanup stage. The
addition of a fuel reformer and an evaporator means that the
system complexity is increased and that changes in fuel flow
migrates slowly through the system. This means that the fuel
cell current and the fuel flow have to be changed synchro-
nously at a limited rate to avoid anode starvation, which is
harmful to the fuel cell as described in Refs. [10] and [11]. In
addition, a sudden negative step in fuel cell current would
mean that the hydrogen flow to the burner is increased sud-
denly, which in severe cases can lead to a thermal meltdown.
For the H3 350module themaximum rate of change of the fuel
cell current is therefore set to 1 [A/min] by the manufacture.
This limit will be observed throughout this work.
A DCeDC converter is therefore integrated to control the
fuel cell current and the controllable parameter is the fuel cell
current, which the user can set a set point for and not the
output current of the module. Fig. 3 shows a plot of the fuel
cell current and the output current of a H3 350 module during
a series of changes in fuel cell current.
Fig. 3 e Fuel cell and battery currents during a series of
changes in fuel cell current of a H3 350 module.

Fig. 5 e Equivalent circuit diagram of the battery model.
i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1 16523
The difference between the modules output current and
the fuel cell current is caused in part by the efficiency of the
DCeDC converter between the fuel cell and the load, but the
difference is mainly caused by the changing balance of plant
(BOP) consumption of the RMFC module.
If the current delivered to a load is to be controlled, the
module has to be connected to a battery. This concept is
illustrated in Fig. 4.
Currently the module is operated with a fixed fuel cell
current, and the module is turned on when the battery rea-
ches a minimum voltage and then turned off again when the
battery reaches a maximum voltage, this is called a hysteresis
control. This means that the fuel cell performs many start/
stop operations, which is harmful to the efficiency and life-
time of the fuel cell [12]. The constant difference between load
current and module output current means that the battery is
constantly being charged or discharged. This leads to an extra
loss component and the efficiency of the system in decreased.
The lifetime of the batterywill also be reduced by the constant
cycling as the number of charge/discharge cycles of a battery
is limited.
The battery is also necessary during the module's startup,
so it is not possible to eliminate it from the system. But if a
controller is developed which controls the module's output
current, it wouldmake it easier to do state of charge control on
the battery. This could potentiallymean that a smaller battery
is needed and that higher system efficiencies could be
reached.
Several factors contribute to the fluctuations in the output
current of the module which can be observed in Fig. 3. Among
these are the changing voltage of the fuel cell and the battery,
the varying BOP losses coming from electric heaters, blowers
and pumps and control electronics.
This means that to develop a controller which can control
the output current of the H3 350 unit, it would be advanta-
geous to develop a dynamicmodel of the relationship between
the fuel cell current and the output current of the module. In
this work such a model will be developed and used to design
an output current controller.
Model structure
The model should include a battery model, which can model
the dynamic response of the battery voltage to changes in the
battery current and a similar model for the fuel cell voltage. In
addition it should include a model of the BOP consumption of
the module. The following sections will introduce these
models.
Fig. 4 e Concept drawing of the electrical circuit of the
experimental setup used in this work.
Battery model
In this work it is chosen to model the battery in one operating
point, meaning that the open circuit voltage is held constant.
In this work, the dynamics of the battery is modeled using
an equivalent circuit as suggested in Ref. [13]. Here one par-
allel resistor-capacitor network is used in series with a series
resistance, because this is found to give the model sufficient
complexity for this application. Fig. 5 shows a diagram of the
equivalent circuit.
Where VOC is the battery's open circuit voltage, Vs is the
voltage drop across the model's series resistance, Rs, Vp is the
voltage drop across the resistor connected in parallel, Rp, and
capacitor, Cp, Vbat is the battery's terminal voltage and Ibat is
the current into the battery. The battery's terminal voltage can
be calculated using Kirchhoff's voltage law:
Vbat ¼ VOC þ Vs þ Vp (1)
Adding the standard equations for Vs and Vp and setting Ibatoutside brackets, the following result is obtained:
Vbat ¼ VOC þ Rs$Ibat þ Rp
Rp$Cp$sþ 1$Ibat
Vbat ¼ VOC þ Rs$Rp$Cp$sþ Rp þ Rs
Rp$Cp$sþ 1$Ibat
(2)
The impedance of the battery can now be defined as:
Vimp ¼ Rs$Rp$Cp$sþ Rp þ Rs
Rp$Cp$sþ 1$Ibat (3)
For modeling purposes, it is advantageous to convert this
transfer function to state space. This is because it makes it
possible to set up initial conditions.
Fig. 6 shows a diagram of how this model is integrated in
MATLAB Simulink.
Fig. 6 e Block diagram of the battery model integrated in
MATLAB Simulink.

Fig. 7 e Block diagram of the fuel cell model integrated in
MATLAB Simulink.
Fig. 8 e Block diagram of the combined models with
controller block.
i n t e rn a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 116524
Fuel cell and balance of plant model
When modeling the fuel cell, it is important to limit the scope
of themodel. In this case, for example, it does not make sense
to construct a complicated model of the relationship between
carbon monoxide in the anode gas and the fuel cell voltage as
in Ref. [14] or the effect of anode starvation as in Ref. [15]. This
is because it is the relationship between the fuel cell current
and the output current of themodule, which is to be modeled.
These two currents differ, because the battery is charged
through a buck-boost DCeDC converter and some of the
power produced by the fuel cell is used for balance of plant
(BOP) components like heaters, blowers and control elec-
tronics inside the fuel cell module.
To calculate the battery current, the power supplied to the
battery has to be calculated and then divided by the battery
voltage which is found using the battery model.
The power supplied to the battery is found to be the power
produced by the fuel cell after the following BOP losses have
been deducted:
� PBOP e a constant consumption from the module's control
electronics.
� Pheater e the constant consumption of a heater in the
module's evaporator.
� Pexcess e the consumption of blowers and the loss in the
DCeDC converter, which increases with the fuel cell
current.
These BOP components were chosen based on measure-
ments performed on a H3-350 module during operation. This
means that the output current of the fuel cell module, Iout, can
be calculated as:
Iout ¼ VFC$IFC � PBOP � Pheater � Pexcess
Vbat(4)
Where IFC is the fuel cell current andVFC is the fuel cell voltage,
which is to be calculated using a polarization curve for the fuel
cell.It is also expected that there will be a dynamic component
to the relationship between fuel cell current and module
output current. This component originates primarily from the
fuel cell impedance as described in Ref. [16] and is on the basis
of observations of the fuel cell module expected to be repre-
sented by a first order system of the form:
VFC
VFC RAW¼ 1
t$sþ 1(5)
Where VFC RAW is the output from the polarization curve
before the dynamics are added. A first order system is also
used to model the delay imposed by the DCeDC converter in
the system.Fig. 7 shows a diagram of how this model is
implemented in MATLAB Simulink.
Model integration
Fig. 8 shows a diagram of how the models described in the
previous sections are implemented in MATLAB Simulink,
together with a controller block and a load model. Measure-
ments carried out on a H3 350 module show that it is neces-
sary to have a filter on themeasurement of the output current
of the module because of measurement noise from an electric
heater with a low duty cycle. This filter is also included in the
model to make the dynamics of the control system similar.
Model fitting
An experimental approach has been employed to find the
unknown parameters in the models described in the earlier
sections. A series of identification experiments will therefore
be performed and used for model fitting. It is first described
how the parameters for the battery model are found.
Battery model fitting
The data from any identification experiments will be discrete
and the transfer function in Equation (3) is therefore

Table 1 e Identified battery constants.
Parameter Value Unit
Cp 224.3 F
Rp 0.0241 U
Rs 0.0409 U
i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1 16525
converted to a discrete transfer function and the linear least
squares method is used for parameter estimation. The model
has one pole and one zero, so the discrete transfer function
will be of the form:
Vimp
Ibat¼ b1$z�1 þ b2
1þ a1$z�1(6)
If y and u are isolated on separate sides of the equation, the
following is obtained:
Vimp þ a1$Vimp$z�1 ¼ b1$Ibat$z
�1 þ b2$Ibat (7)
This is then converted to a difference equation and the
future value of V at sample n is isolated:
VimpðnÞ þ a1$Vimpðn�1Þ ¼ b1$Ibatðn�1Þ þ b2$IbatðnÞVimpðnÞ ¼ �a1$Vimpðn�1Þ þ b1$Ibatðn�1Þ þ b2$IbatðnÞ
(8)
and a vector of unknown parameters can be defined:
w ¼24a1
b1
b2
35 (9)
together with an explanatory value:
f ¼ ��Vimpðn�1Þ Ibatðn�1Þ IbatðnÞ�
(10)
Here defined at one point. The difference equation can
then be expressed as:
VimpðnÞ ¼ f w (11)
An estimate of the parameter vector called bw is now
desired. This can be done by defining the residual error:
ε :¼ VimpðnÞ � f bw (12)
and an objective function for optimization:
J�bw� ¼ ε
Tε
J�bw� ¼
�VT
impð1Þ � fT bwT��
Vimpð1Þ � f bw� (13)
The solution for this optimization problem is:
bw ¼ �fTf
��1fTVimpðnÞ (14)
More details of how this solution is derived can be found
here [[17], p.63].
An identification experiment is performed, where the
battery current is stepped from 0 to 10 [A] and the voltage
response is measured. The explanatory variable from Equa-
tion (10) is then defined as the matrix F:
F ¼
2664
�Vimpð0Þ Ibatð0Þ Ibatð1Þ�Vimpð1Þ Ibatð1Þ Ibatð2Þ
« « «�VimpðN�1Þ IbatðN�1Þ IbatðNÞ
3775 (15)
where N þ 1 is the number of samples in the data set, which
are numbered from 0 to N. Vimp(n) in Equation (14) is replaced
with:
Vimp ¼
2664Vimpð1ÞVimpð2Þ
«VimpðNÞ
3775 (16)
and the calculation in Equation (14) is performed. This yields
the difference equation:
Vimp
Ibat¼ 0:02993$z�1 þ 0:04091
1� 0:8311$z�1(17)
which can be converted to a continuous transfer function:
Vimp ¼ 0:2211sþ 0:06505:4054sþ 1
$Ibat (18)
Solving this as three equations with three variables yields
the values in Table 1.
Fig. 9 shows how the model, with the calculated constants,
responds to the step in battery current compared with the
experiment.
The fit of the model appears to be good and the mean ab-
solute error is 1.2%, which is deemed to be acceptable.
To investigate if the model is valid during other steps in
battery current, a step from 10 to zero [A] is performed. For
easy simulation, the data is normalized around zero. Fig. 10
shows the response to this step in model and experiment.
Here the response differs slightly between experiment and
simulation. The initial increase in battery voltage, caused by
the zero in the system's transfer function, is the same in
model and experiment. But the voltage measured reaches its
steady state value more slowly. The mean absolute error in
this experiment is 4.15%, which is deemed to be acceptable
and the model is used as is.
Fuel cell model fitting
The polarization curve of the fuel cell is obtained by running
the fuel cell at 8 different constant currents spanning its
operating range and measuring the fuel cell voltage. Fig. 11
shows a plot of the resulting polarization curve.
The fitting process of the dynamic part of the fuel cell
model is similar to that of the battery model. The model in
Equation (5) is converted to a discrete transfer function:
VFC
VFC RAW¼ b1
1þ a1$z�1(19)
and then a difference equation:
VFCðnÞ þ a1$VFCðn�1Þ ¼ b1$VFC RAWðnÞVFCðnÞ ¼ �a1$VFCðn�1Þ þ b1$VFC RAWðnÞ
(20)
and a vector of unknown parameters is defined as:
w ¼�a1
b1
(21)
together with an explanatory value:
f ¼ ��VFCð0Þ VFC RAWð1Þ�
(22)
As in the previous section, an identification experiment is

Fig. 9 e Plot of battery model fitting normalized around
zero [V] and [A], respectively.
Fig. 11 e Plot of the fuel cell polarization curve measured
on the H3 350 module.
i n t e rn a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 116526
performed. Here it is not possible to perform a step in the fuel
cell current, because of the 1 [A/min] limit imposed on its rate
of change by the system dynamics described in Section 1.
Instead the fuel cell current is ramped from 12 to 14 [A] and
the current data is normalized around zero [A] and the fuel cell
voltage around zero [V].
A F matrix and a VFC vector are defined and used to
calculate bw as in Equation (14). This yields the following
discrete transfer function:
Fig. 10 e Plot of battery model checking experiment
normalized around zero [V] and [A], respectively.
VFC
VFC RAW¼ �0:0683
1� 0:8707$z�1(23)
and the continuous transfer function:
VFC
VFC RAW¼ �0:4935
7:2254sþ 1(24)
The fuel cell current from the experiment is fed to the
model and the response in both model and experiment is
plotted in Fig. 12.
As the figure shows, the response of the model follows the
general tendencies in the experiment and the mean absolute
error is 11.8%. This error seems large, but it is amplified by the
normalization of the fuel cell voltage around zero. If the error
is calculated at the actual fuel cell voltage of z24 [V] the error
is 0.5%.
There is a bump in the response of the measured fuel cell
voltage which is not seen in the model. Closer examination
reveals that this bump comes from an oscillation in the
reformer temperature, which changes the gas composition,
which in turn affects the fuel cell voltage. It is not possible to
include this effect in the model without including a thermal
model of the fuel cell, such as the one presented in Ref. [6],
which is outside the scope of this work.
To further test the validity of the model, a change of fuel
cell current is performed form 10 to 12 [A]. Fig. 13 shows the
response in the experiment and in the model.
The same tendencies are visible in this experiment, where
the general dynamic response of the model is accurate, but
there is a bump in the fuel cell voltage response. Here the
mean absolute error is 14.9%, slightly higher than in the fitting
experiment, because the bump in the fuel cell voltage is
bigger.
It is concluded that the fuel cell model is sufficiently ac-
curate for its purpose and the time constant of the identified
system, t ¼ 7.22, is used in the model in Equation (5).
Balance of plant model fitting
The consumption of the module's Balance of plant (BOP)
components, described in Section 2.2, is assessed on the basis
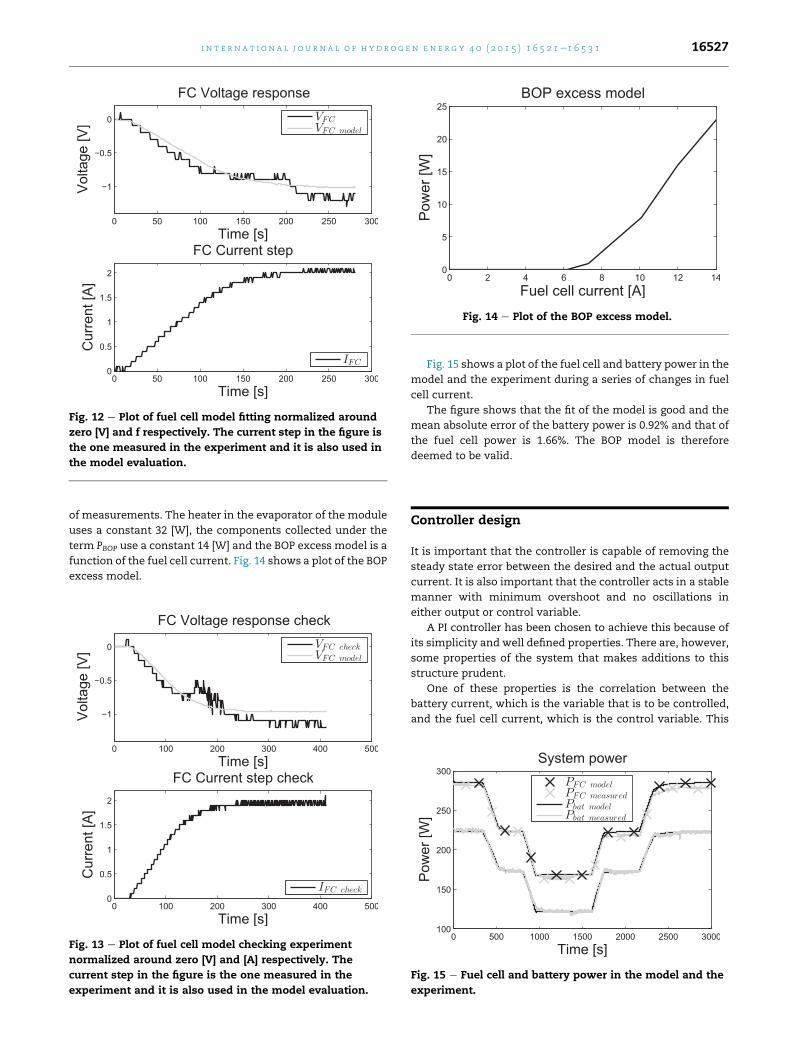
Fig. 12 e Plot of fuel cell model fitting normalized around
zero [V] and f respectively. The current step in the figure is
the one measured in the experiment and it is also used in
the model evaluation.
Fig. 14 e Plot of the BOP excess model.
i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1 16527
of measurements. The heater in the evaporator of the module
uses a constant 32 [W], the components collected under the
term PBOP use a constant 14 [W] and the BOP excess model is a
function of the fuel cell current. Fig. 14 shows a plot of the BOP
excess model.
Fig. 13 e Plot of fuel cell model checking experiment
normalized around zero [V] and [A] respectively. The
current step in the figure is the one measured in the
experiment and it is also used in the model evaluation.
Fig. 15 shows a plot of the fuel cell and battery power in the
model and the experiment during a series of changes in fuel
cell current.
The figure shows that the fit of the model is good and the
mean absolute error of the battery power is 0.92% and that of
the fuel cell power is 1.66%. The BOP model is therefore
deemed to be valid.
Controller design
It is important that the controller is capable of removing the
steady state error between the desired and the actual output
current. It is also important that the controller acts in a stable
manner with minimum overshoot and no oscillations in
either output or control variable.
A PI controller has been chosen to achieve this because of
its simplicity and well defined properties. There are, however,
some properties of the system that makes additions to this
structure prudent.
One of these properties is the correlation between the
battery current, which is the variable that is to be controlled,
and the fuel cell current, which is the control variable. This
Fig. 15 e Fuel cell and battery power in the model and the
experiment.

Fig. 17 e Negative step in battery current set point
performed in the model. IFC model RAW is the fuel cell voltage
set point before the rate limiter.
i n t e rn a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 116528
means that using a feedforward of the output current set point
is ideal.
The second addition to the PI controller structure is due to
the limited rate of change imposed on the control variable IFCby the system dynamics described in Section 1. This means
that there is a risk of integrator windup, leading to controller
instability [[18], p.80]. It is therefore chosen to include an anti-
windup in the controller. The alternative to the anti windup is
to tune the controller so conservatively that the largest
possible changes in reference are performed without integral
windup. This would make the response of the controller very
slow and is therefore undesirable.
Fig. 16 shows a block diagram of the controller.
Investigation of measurements shows that the average
difference between the fuel cell current and the output cur-
rent is 3 [A]. The feedforward constant is therefore set to
Kff ¼ 3.
The other controller constants are tuned iteratively using
the model, and Kp ¼ 0.0240 and Ki ¼ 0.0192 are found to give a
good compromise between stability and fast settling. There
are many possible policies for setting KAW, but it is generally
recommended that is set to a larger or equal value to Ki [[18],
p.85]. The reason is that the anti-windup should be able to
react as quickly as the buildup of the integral compensation.
Here KAW is set to the same value as Ki based on model
simulations.
Fig. 17 shows a representative negative step response from
the model using these constants and Fig. 18 shows a repre-
sentative positive step response.
Here, and in the rest of this work, the load current is zero
and the modules output current is equal to the battery
current.
In both of the step responses, the fuel current follows the
rate limiter until just before the module's output current rea-
ches its set point.While the fuel cell current is rate limited, the
anti-windup limits the raw controller output IFC model RAW.
When the output current comes close to the set point, the
anti-windup stops being active, and the controller leads the
output current smoothly to its final value.
To illustrate the usefulness of the anti-windup, a step
similar to the one in Fig. 18 is performed without anti-windup
and plotted in Fig. 19.
Fig. 16 e Diagram of the output current controller.
Here it is apparent that integrator windup occurs and a
large overshoot in the output current is the result.
As Figs. 18 and 17 illustrate, the controller with its anti-
windup and feedforward works well in the model without
overshoot or oscillations in the output or control variables. It
is therefore concluded that the developed controller should be
tested in the H3 350 module.
Fig. 18 e Positive step in output current set point
performed in the model. IFC model RAW is the fuel cell voltage
set point before the rate limiter.
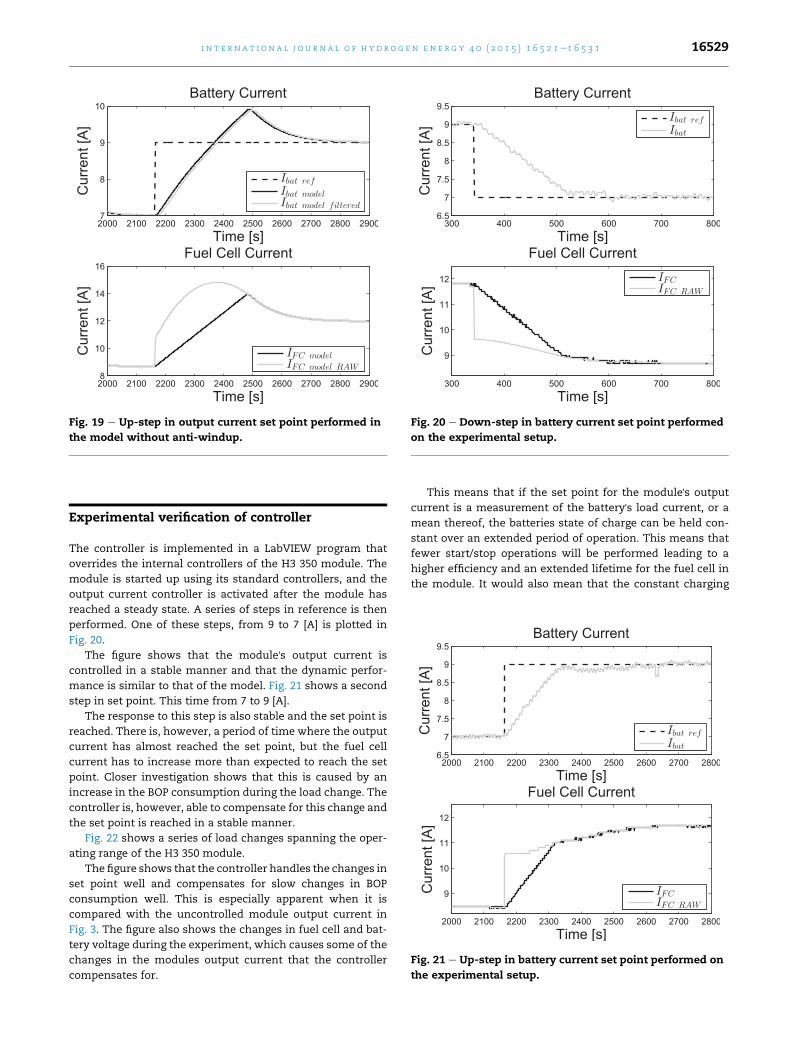
Fig. 19 e Up-step in output current set point performed in
the model without anti-windup.
Fig. 20 e Down-step in battery current set point performed
on the experimental setup.
Fig. 21 e Up-step in battery current set point performed on
the experimental setup.
i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1 16529
Experimental verification of controller
The controller is implemented in a LabVIEW program that
overrides the internal controllers of the H3 350 module. The
module is started up using its standard controllers, and the
output current controller is activated after the module has
reached a steady state. A series of steps in reference is then
performed. One of these steps, from 9 to 7 [A] is plotted in
Fig. 20.
The figure shows that the module's output current is
controlled in a stable manner and that the dynamic perfor-
mance is similar to that of the model. Fig. 21 shows a second
step in set point. This time from 7 to 9 [A].
The response to this step is also stable and the set point is
reached. There is, however, a period of time where the output
current has almost reached the set point, but the fuel cell
current has to increase more than expected to reach the set
point. Closer investigation shows that this is caused by an
increase in the BOP consumption during the load change. The
controller is, however, able to compensate for this change and
the set point is reached in a stable manner.
Fig. 22 shows a series of load changes spanning the oper-
ating range of the H3 350 module.
The figure shows that the controller handles the changes in
set point well and compensates for slow changes in BOP
consumption well. This is especially apparent when it is
compared with the uncontrolled module output current in
Fig. 3. The figure also shows the changes in fuel cell and bat-
tery voltage during the experiment, which causes some of the
changes in the modules output current that the controller
compensates for.
This means that if the set point for the module's output
current is a measurement of the battery's load current, or a
mean thereof, the batteries state of charge can be held con-
stant over an extended period of operation. This means that
fewer start/stop operations will be performed leading to a
higher efficiency and an extended lifetime for the fuel cell in
the module. It would also mean that the constant charging

Fig. 22 e Series of step responses performed on the experimental setup.
i n t e rn a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 116530
and discharging of the battery can be minimized, leading to a
reduced energy loss in the battery because less current is
passed through its internal resistance.
Conclusions
In this work a model of the relationship between fuel cell and
output current of a H3 350 reformedmethanol fuel cellmodule
produced by Serenergy has been produced and used to
develop an output controller.
Themodel has threemain parts: a batterymodel, a fuel cell
model and a BOP model.
The battery model consists of an open circuit voltage and
an equivalent circuit model and was found to have a mean
absolute error of 1.2% on its fitting data and 4.15% on its
checking data.
The fuel cell model consists of a polarization curve with
added first order dynamics. This model has a mean absolute
error of 11.8% on its fitting data and 14.9% on its checking data.
The BOP model includes constant contributions from a
heater in the evaporator, constant contributions from other
BOP components such as controllers and pumps and a term
that is dependent on the fuel cell current. This model is found
to have a mean absolute error of 0.92% when comparing the
battery current in the model and the experiment.
This model was used to develop a controller for the output
current of the module which uses a PI controller with feed-
forward and anti-windup. This controller is tested in the
model and in the H3 350 module. The controller is found to
function as intended and it is concluded that the controller
could have applications in state of charge control in systems
with batteries and reformed methanol fuel cells. This state of
charge control could lead to an extended lifetime for the fuel
cell because of fewer start/stop operations and a higher sys-
tem efficiency due to less charging and discharging of the
battery in the system.
Future work
There are areas where the models developed in this work
could be improved. Disturbance models could for example be
included. These disturbances include changes in battery load
current or the slow change in BOP consumption, mentioned in
the previous section.
The controller developed in this work functions well, but if
more models of measured disturbances where developed, a
model predictive control could be employed instead to
compensate for these, as it is done for a conventional fuel cell
system in Ref. [19].

i n t e r n a t i o n a l j o u r n a l o f h y d r o g e n en e r g y 4 0 ( 2 0 1 5 ) 1 6 5 2 1e1 6 5 3 1 16531
Acknowledgment
We gratefully acknowledge the financial support of the EUDP
program and the cooperation of Serenergy A/S.
r e f e r e n c e s
[1] Dutta S. A review on production, storage of hydrogen and itsutilization as an energy resource. J Ind Eng Chem2014;20(4):1148e56. http://dx.doi.org/10.1016/j.jiec.2013.07.037.
[2] Satyapal S, Petrovic J, Read C, Thomas G, Ordaz G. The U.S.department of energy's national hydrogen storage project:progress towards meeting hydrogen-powered vehiclerequirements. Catal Today 2007;120:246e56. http://dx.doi.org/10.1016/j.cattod.2006.09.022.
[3] Serenergy a/s home page, http://www.serenergy.com/(July2015).
[4] Zhang J, Xie Z, Zhang J, Tang Y, Songa C, Navessin T, et al.High temperature PEM fuel cells. J Power Sources2006;160:872e91. http://dx.doi.org/10.1016/j.jpowsour.2006.05.034.
[5] Andreasen SJ, Vang JR, Kær SK. High temperature PEM fuelcell performance characterisation with co and co2 usingelectrochemical impedance spectroscopy. Int J HydrogenEnergy 2011;36:9815e30. http://dx.doi.org/10.1016/j.ijhydene.2011.04.06.
[6] Justesen KK, Andreasen SJ, Shaker HR. Dynamic modeling ofa reformed methanol fuel cell system using empirical dataand adaptive neuro-fuzzy inference system models. J FuelCell Sci Technol 2013;11. http://dx.doi.org/10.1115/1.4025934.021004 e 021004e8.
[7] Chrenko D, Gao F, Blunier B, Bouquain D, Miraoui A.Methanol fuel processor and PEM fuel cell modeling formobile application. Int J Hydrogen Energy 2010;35:6863e71.http://dx.doi.org/10.1016/j.ijhydene.2010.04.022.
[8] Kolb G, Keller S, Tiemann D, Schelhaas K-P, Schurer J,Wiborg O. Design and operation of a compact microchannel5 kw el,net methanol steam reformer with novel pt/in2o3catalyst for fuel cell applications. Chem Eng J2012;207:388e402. http://dx.doi.org/10.1016/j.cej.2012.06.141.22nd International Symposium on Chemical ReactionEngineering (ISCRE 22).
[9] Hulteberg P, Porter B, Silversand F, Woods R. A versatile,steam reforming based small-scale hydrogen productionprocess. In: 16th world hydrogen energy conference; 2006.WHEC 2006.
[10] Yousfi-Steiner N, Mocoteguy P, Candusso D, Hissel D. Areview on polymer electrolyte membrane fuel cell catalystdegradation and starvation issues: causes, consequencesand diagnostic for mitigation. J Power Sources2009;194:130e45. http://dx.doi.org/10.1016/j.jpowsour.2009.03.060.
[11] Mitsuda K, Murahashi T. Air and fuel starvation ofphosphoric acid fuel cells: a study using a single cell withmulti-reference electrodes. J Appl Electrochem1991;21:524e30. http://dx.doi.org/10.1007/BF01018605.
[12] Schmidt TJ, Baurmeister J. Properties of high-temperaturePEFC Celtec-P 1000 MEAS in start/stop operation mode. JPower Sources 2008;176(2):428e34. http://dx.doi.org/10.1016/j.jpowsour.2007.08.055. selected Papers presented at the10th{ULM} ElectroChemical Days W. Tillmetz, J. Lindenmayer10th Ulm ElectroChemical Days.
[13] Seaman A, Dao T-S, McPhee J. A survey of mathematics-based equivalent-circuit and electrochemical battery modelsfor hybrid and electric vehicle simulation. J Power Sources2014;256:410e23. http://dx.doi.org/10.1016/j.jpowsour.2014.01.057.
[14] Korsgaard AR, Nielsen MAP, Bang M, Kær SK. Modeling of coinfluence in pbi electrolyte PEM fuel cells. In: ASME 2006 4thinternational conference on fuel cell science, engineeringand technology; 2006. http://dx.doi.org/10.1115/FUELCELL2006e97214.
[15] Ohs JH, Sauter U, Maass S, Stolten D. Modeling hydrogenstarvation conditions in proton-exchange membrane fuelcells. J Power Sources 2011;196(1):255e63. http://dx.doi.org/10.1016/j.jpowsour.2010.06.038.
[16] Niya SMR, Hoorfar M. Study of proton exchange membranefuel cells using electrochemical impedance spectroscopytechnique: a review. J Power Sources 2013;240:281e93. http://dx.doi.org/10.1016/j.jpowsour.2013.04.011.
[17] Keesman KJ. System identification, an introduction.Springer; 2011.
[18] Astrom K, Hagglund T. PID controllers: theory, design, andtuning. 2nd ed. Instrument Society of America; 1995.
[19] Bordons C, Ridao MA, Perez A, Arce A, Marcos D. Modelpredictive control for power management in hybrid fuel cellvehicles. In: Vehicle power and propulsion conference IEEE;2010. http://dx.doi.org/10.1109/VPPC.2010.5729119.