modelos de perturbações -...
TRANSCRIPT

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
38
Modelos de Perturbações
As perturbações existentes num sistema impôem limitações fortes no
desempenho dos sistemas de controlo.
Sistema
Pertub. à
entrada
Pertub.
internas Pertub. à
saída
Ruído de
sensor
u y
medição
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
39
Redução das Perturbações
• Redução da fonte:
o utilizar sensores com menor ruído e utilizar actuadores com menor fricção, zonas mortas, etc...
o proteger efeitos externos (temperatura, ruído electromagnetico, vibrações mecânicas).
o alterar o período de amostragem para melhorar a representação do sistema.
• Redução por feedback local
o Quando as perturbações não podem ser reduzidas na fonte, podemos tentar regulá-las por malhas
de controlo locais. Ex: controlo de um actuador para reduzir os efeitos de carga, estabilização de
uma fonte de alimentação para evitar perturbações electricas no equipamento.
• Redução por feedforward
o Se a perturbação pode ser medida, gera-se um sinal de controlo para anular seu efeito.
• Redução por predição
o Se a perturbação não pode ser medida directamente, podemos tentar predizer valores futuros de
sinais que representam o efeito das perturbações e gerar controlos adequados
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
40
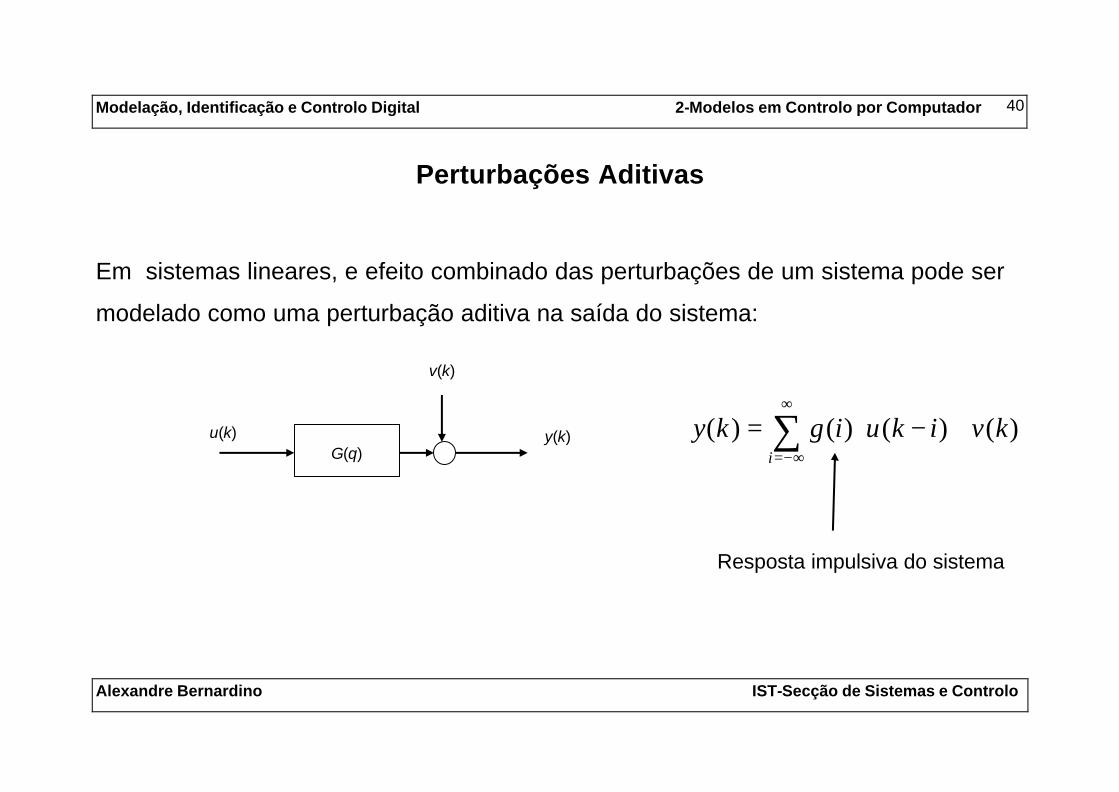
Perturbações Aditivas
Em sistemas lineares, e efeito combinado das perturbações de um sistema pode ser
modelado como uma perturbação aditiva na saída do sistema:
( ) ( ) ( ) ( )i
y k g i u k i v k∞
=−∞
= ⋅ − +∑
G(q)
v(k)
y(k) u(k)
Resposta impulsiva do sistema

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
41
Perturbações determinísticas por troços
Há casos em que existe um conhecimento à priori da natureza da perturbação, embora possamos
não conhecer os instantes da sua ocorrência. Ex: variações de carga num manipulador robótico,
rajadas de vento numa parabólica, ondulação num navio, etc.
Este tipo de perturbações pode ser modelado por sinais do tipo escalão, rampa, sinusoide,
actuando em instantes de tempo e com intensidades desconhecidas.
( ) , com prob.
( ) 0, com prob. 1-
e k r
e k
µµ
= =
H(q) e(k) v(k)
Perturbações impulsivas: H(q) = 1
Perturbações escalão: H(q) = q/(q-1)
Perturbações rampa: H(q) = hq/(q-1)2
Perturbações sinusoidais: H(q) = q sin(hw)/(q2 -2q cos(hw) + 1)

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
42
Perturbações Estocásticas
De modo a permitir representar um conjunto mais completo de tipos de perturbação, recorre-se a
modelos estocásticos.
O modelo de formação da perturbação é idêntico ao caso anterior mas o sinal e(k) é tomado como
“ruído branco”.
Neste contexto, os sinais são caracterizados através de funções estatísticas tais como a média e
a covariância. Teremos que rever os conhecimentos de estatística !
H(q) e(k) – Ruído branco v(k) – Ruído branco filtrado

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
43
Caracterização das Perturbações
Função média: ( ) { }( )m k E v k= E{.} – valor esperado
Função de covariância: ( ) { }( ) ( )vR E v k v kτ τ= +
Espectro: ( ) ( ) jv vR e ωτ
τ
ω τ+∞
−
=−∞
Φ = ∑

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
44
Ruído Branco
Define-se ruido branco como uma sequência de variáveis aleatórias independentes, de
média nula e identicamente distribuidas (processo estacionário).
A função de covariância do ruído branco é dada por:
2 , 0( )
0, 1, 2,...k
r kk
σ ==
= ± ±
O seu espectro é:
( ) 2 ,φ ω σ ω= ∀

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
45
O ruído branco corresponde à noção de sinal sem memória. O seu espectro
é plano e a sua autocorrelação um impulso (discreto):
0 10 20 30 40 50 60 70 80 90 100
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
-5 0 5 10 15 20 25
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Atraso
Au
toco
rre
laçã
o
10
-210
-110
010
110
-1
100
101
frequency (rad/sec)
SPECTRUM output # 1

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
46
As figuras anteriores foram
obtidas com o seguinte
procedimento (MATLAB 5.3 e
System Ident. Toolbox)
% Ficheiro WN1.m
% Ruído branco em tempo discreto:
% Sinal no tempo, espectro e autocorrelação
%Sinal de ruído branco em tempo discreto
randn;
u=randn(5000,1);
plot(u);
xlabel('Tempo discreto');
ylabel('Ruído');
pause
% Determinação da autocorrelação
Ru=covf(u,21);
for i=1:21;
tau(i)=i-1;
end;
bar(tau,Ru);
xlabel('Atraso')
ylabel('Autocorrelação');
grid
pause
% Determinação do espectro
G=spa(u,10);
bodeplot(G);

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
47
Descrição de sistemas com perturbações estocásticas
H(q)
G(q)
e(t)
u(t) y(t)+
+
ν(t)
No tempo: y t G q u t H q e t( ) ( ) ( ) ( ) ( )= +
Na frequência: G e j( )ω; ( )v ωΦ
Componentes Determinísticas Componentes Estocásticas

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
48
Estruturas de Sistemas Actuados por Ruído Branco
Estrutura Média Deslizante (Moving Average - MA)
1( ) ( ) ( 1) ( )ny k e k c e k c e k n= + − + + −…
Estrutura Autoregressiva (AR)
1( ) ( 1) ( ) ( )ny k a y k a y k n e k+ − + + − =…
e(k)
v(k) y(k)
e(k)
v(k) y(k)
( )C q
1( )A q
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
49
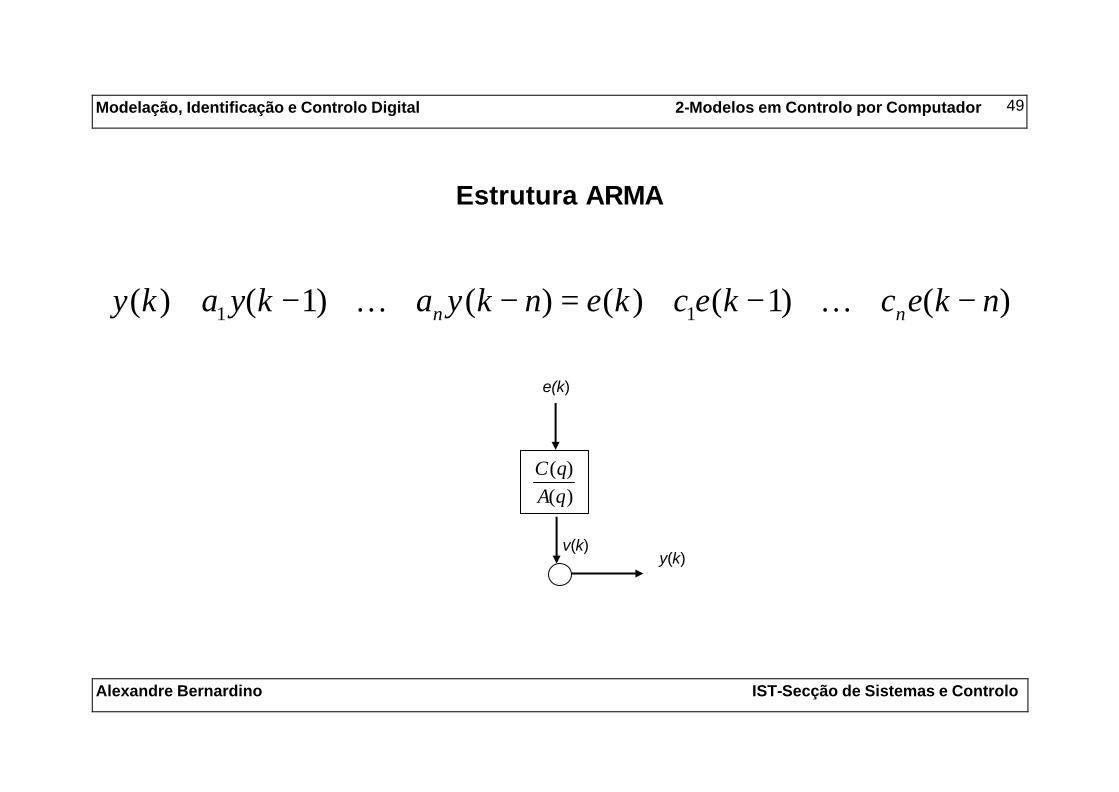
Estrutura ARMA
1 1( ) ( 1) ( ) ( ) ( 1) ( )n ny k a y k a y k n e k c e k c e k n+ − + + − = + − + + −… …
e(k)
v(k) y(k)
( )( )
C qA q

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
50
Estrutura ARX
X – Entrada Externa (exogenous input)
1 0( ) ( 1) ( ) ( ) ... ( ) ( )n my k a y k a y k n b u k d b u k d m e k+ − + + − = − + + − − +…
e(k)
( )( )
B qA q
v(k) y(k) u(k) x(k)
1( )A q

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
51
Estrutura ARMAX
1
0 1
( ) ( 1) ( )
( ) ... ( ) ( ) ( 1) ... ( )n
m n
y k a y k a y k n
b u k d b u k d m e k c e k c e k n
+ − + + − =
= − + + − − + + − + + −
…
e(k)
( )( )
B qA q
v(k) y(k) u(k) x(k)
( )( )
C qA q

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
52
Propagação de covariâncias e espectros em SLITS
2( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
j j jy u u
juy u
H e H e H e
H e
ω ω ω
ω
φ ω φ ω φ ω
φ ω φ ω
−= =
=
H(q)
y(k) u(k)
( ) ( ) ( ) ( )
( ) ( ) ( )
y un l
yu un
r h n r n l h l
r h n r n
τ τ
τ τ
+∞ +∞
=−∞ =−∞
+∞
=−∞
= − +
= −
∑ ∑
∑
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
53
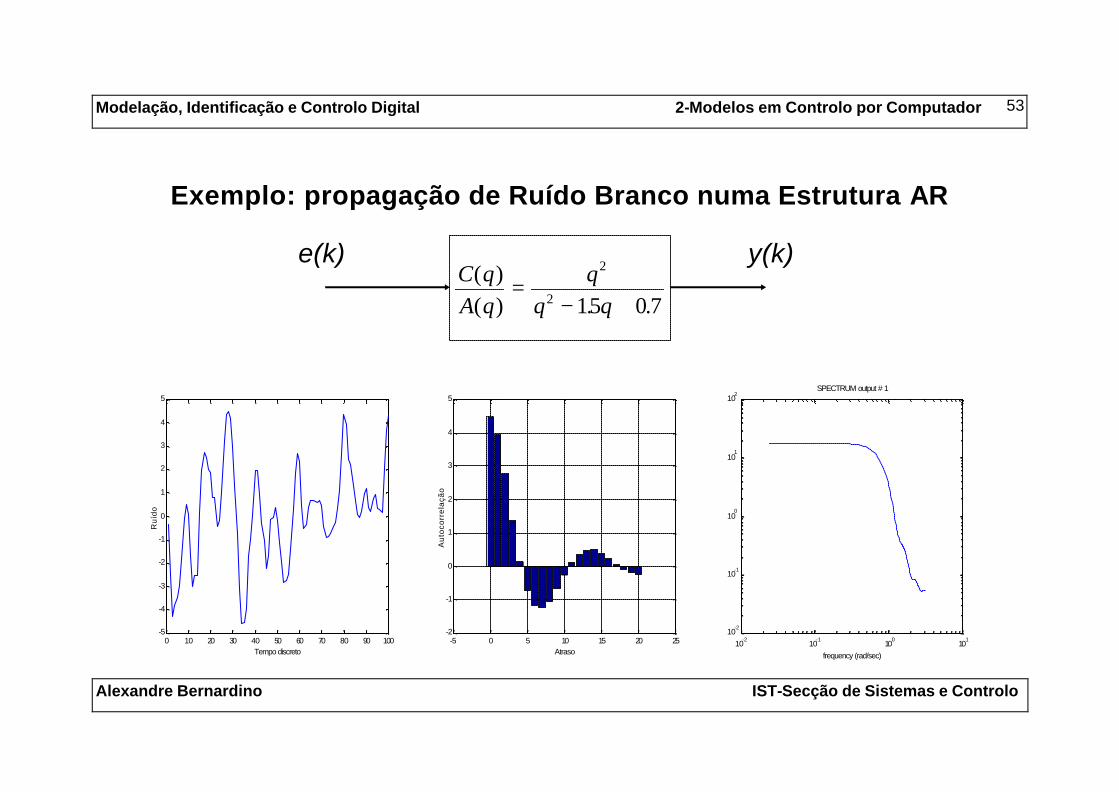
Exemplo: propagação de Ruído Branco numa Estrutura AR
0 10 20 30 40 50 60 70 80 90 100-5
-4
-3
-2
-1
0
1
2
3
4
5
Tempo discreto
Ruí
do
-5 0 5 10 15 20 25-2
-1
0
1
2
3
4
5
Atraso
Au
toco
rre
laçã
o
10-2
10-1
100
101
10-2
10-1
100
101
102
frequency (rad/sec)
SPECTRUM output # 1
C qA q
qq q
( )( ) . .
=− +
2
2 15 0 7
e(k) y(k)
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
54
% Ficheiro CN1.m
% Ruído filtrado em tempo discreto:
% Sinal no tempo, espectro e autocorrelação
%Sinal modelo ARMA (ARMAX com u=0)
randn;
e=0.7*randn(5000,1);
u=zeros(5000,1);
model1=poly2th([1 -1.5 0.7],[0],[1 0 0]);
y=idsim([u e],model1);
plot(y(1:100));
xlabel('Tempo discreto');
ylabel('Ruído');
pause
% Determinação da autocorrelação
Ry=covf(y,21);
for i=1:21;
tau(i)=i-1;
end;
bar(tau,Ry);
xlabel('Atraso')
ylabel('Autocorrelação');
grid
pause
% Determinação do espectro
Gy=spa(y,10);
bodeplot(Gy);
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
55
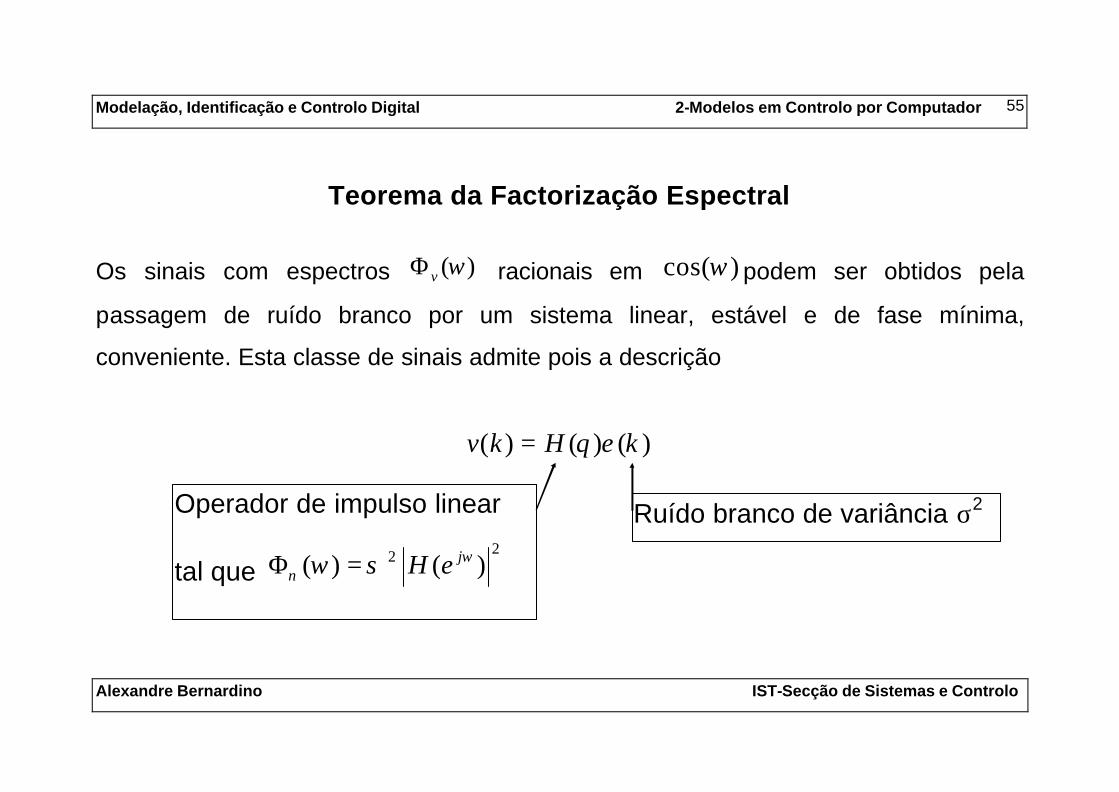
Teorema da Factorização Espectral
Os sinais com espectros ( )v ωΦ racionais em cos( )ω podem ser obtidos pela
passagem de ruído branco por um sistema linear, estável e de fase mínima,
conveniente. Esta classe de sinais admite pois a descrição
( ) ( ) ( )v k H q e k=
Ruído branco de variância σ2
Operador de impulso linear
tal que 22( ) ( )jH e ω
ν ω σΦ =

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
56
Podemos factorizar o espectro de v(k) em: 2( ) ( ) ( )j jH e H eω ω
ν ω σ −Φ =
Fazendo z = ejω, podemos representar a equação anterior com a TZ:
2 1( ) ( ) ( )F z H z H zσ −=
F(z) contém polos e zeros em pares recíprocos: para cada polo ou zero
fora do círculo unitário, existe outro dentro do círculo unitário. Escolhendo
apenas os polos e zeros estáveis, obtém-se um filtro estável e de fase
mínima H(z) que gera o espectro desejado, se actuado com ruído branco.
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
57
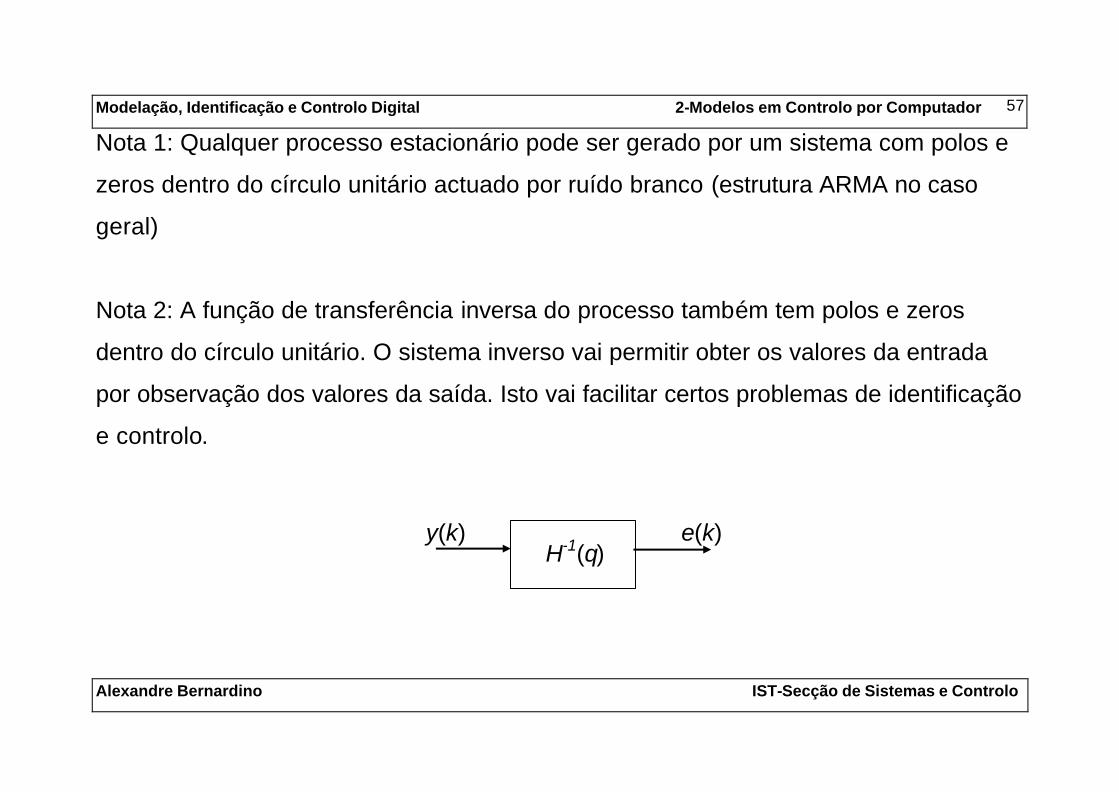
Nota 1: Qualquer processo estacionário pode ser gerado por um sistema com polos e
zeros dentro do círculo unitário actuado por ruído branco (estrutura ARMA no caso
geral)
Nota 2: A função de transferência inversa do processo também tem polos e zeros
dentro do círculo unitário. O sistema inverso vai permitir obter os valores da entrada
por observação dos valores da saída. Isto vai facilitar certos problemas de identificação
e controlo.
H-1(q)
e(k) y(k)

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
Alexandre Bernardino IST-Secção de Sistemas e Controlo
58
Exercícios
1 - Determinar a função de covariância e o espectro do processo ARMA y(k), tal que:
( ) 0.7 ( 1) ( ) 0.5 ( 1)y k y k e k e k− − = − −
onde e(k) é ruído branco de média nula variância unitária.
2 – Admita que se pretende gerar um sinal y(k) com espectro:
1( )
1.36 1.2cosyφ ωω
=+
Determine um filtro estável que produza o sinal desejado para entrada ruído branco de variância unitária.
3 – Seja y(k) um processo estocástico gerado por ruído branco e(k) através de um filtro estável e de fase
mínima H(q).
a) Mostre que a covariância e espectro de y(k) não se alteram com atrasos arbitrários no sinal de ruído.
b) Mostre que é sempre possível obter um filtro causal que inverta o processo estocástico.