modern control systems -...
TRANSCRIPT

MODERN CONTROL SYSTEMS Teacher: Khoshnam Shojaei
Assistant Professor, IAUN Personal Webpage: http://khoshnam-shojaei.ir/
Course Syllabus: ● Chapter1: Introduction ● Chapter 2: Mathematical Preliminaries (Linear Algebra) ● Chapter 3: Linear Systems Representation ● Chapter 4: Controllablity and Observability Concepts ● Chapter 5: Realization Theory ● Chapter 6: State Feedback and State Estimators ● Chapter 7: Stability ● Chapter 8: Linear Optimal Control
References: [1] C.T. Chen, Linear system theory and design, Oxford university press, 1999 . [2] A. Khaki-Sedigh, Modern Control Systems, Tehran university press, 2004 . [3] W. L. Brogan, Modern Control Theory, Prentice Hall, 1991.

معرفي :اول فصل
:صنعتي هاي سيستم كنترل :مدل سازي و توصيف رياضي
مشتمل بر بدست آوردن معادالت حاكم بر سيستم
:تحليل سيستم فيزيكي محاسبه پاسخ سيستم ها به ازاي ورودي هاي مشخص - ...مشاهده پذيري و , كنترل پذيري, بررسي خواص سيستم ها نظير پايداري -
) در حوزه فركانس(توابع تبديل , )در حوزه زمان(معادله ديفرانسيل
:طراحي كنترل كننده و جبران ساز .اگر پاسخ يك سيستم رضايت بخش نباشد، بايد به كمك كنترل كننده اصالح شود
Teacher: Khoshnam Shojaei

معرفي :اول فصل
:كالسيك روش به صنعتي هاي سيستم كنترل
:مدل سازي و توصيف رياضي
:تحليل سيستم فيزيكي
:طراحي كنترل كننده و جبران ساز , روش مكان هندسي ريشه ها - ...و ) به كمك نمودار هاي بود و نايكوئست(طراحي هاي حوزه فركانس -
سيستم هاي زمان پيوسته تبديل الپالس
zتبديل سيستم هاي زمان گسسته
...سهمي و , پله, پاسخ ضربه ... تبدل الپالس و , اپراتور كانولوشن - )حاالت گذرا و ماندگار(
...معيار نايكوئيست و , هورويتز -معيار پايداري راوث تحلل سيستم -. . .
Teacher: Khoshnam Shojaei

معرفي :اول فصل
:مدرن روش به صنعتي هاي سيستم كنترل !معادله ديفرانسيل مرتبه يك تبديل مي شود nبه nمعادله ديفرانسيل مرتبه
:متغير هاي سيستم را حالت مي ناميم و آنها را در بردار حالت ذخيره مي كنيم
( ) ( ) ( )( ) ( ) ( )
x t x t u ty t
BC Dx t tA
u= +
= +
[ ]1 2( ) ( ), ( ), , ( ) Tnx t x t x t x t=
:معادله حالت
:معادله خروجي
:بردار حالت
] :بردار ورودي هاي دستگاه ]1 2( ) ( ), ( ), , ( ) Tmu t u t u t u t=
ماتريس ورودي ماتريس حالت
خروجي -ماتريس ورودي ماتريس خروجي
n nA ×∈ℜ n mB ×∈ℜ
p nC ×∈ℜ
1 2( ) ( ), ( ), , ( )T
py t y t y t y t =
:بردار خروجي هاي دستگاه
p mD ×∈ℜ
Teacher: Khoshnam Shojaei
( ) ( ) ( )( ) ( ) ( )
x t x t u ty t
BC Dx t tA
u= +
= +
:معادله حالت
:معادله خروجي
معرفي :اول فصل
:مزاياي نمايش فضاي حالت
توصيف كامل ديناميك داخلي سيستم
nسهولت حل معادله ديفرانسيل مرتبه اول نسبت به مرتبه
مدل سازي ساده سيستم هاي تغيير پذير با زمان
MIMOبه سيستم هاي SISOتعميم ساده سيستم هاي
وارد كردن شرايط اوليه در تحليل و طراحي سيستم ها
بيشتر روش هاي كنترل پيشرفته در فضاي حالت طراحي شده اند
سهولت حل مسائل كنترل بهينه در طراحي سيستم هاي كنترل
Teacher: Khoshnam Shojaei

معرفي :اول فصل
:انتخاب متغيرهاي حالت● اولين گام در به كار گيري مفاهيم حالت جهت تحليل و طراحي سيستم هاي كنترل انتخاب متغير هاي حالت
:است
:نمايش هاي متداول متغير هاي حالت●
. . .)سرعت و , جابجايي, ولتاژ, نظير جريان(متغير هاي فيزيكي
متغير هاي فاز
متغير هاي حالت كانونيكال
انتخاب مي شوند و از ميان متغير هاي عناصر ذخيره كننده انرژي متغير هاي فيزيكي معموال بر اساس ● .هستند بايد انتخاب شوندنا وابسته فيزيكي آنهايي كه
!متغيري كه نتوان آن را بر حسب متغيرهاي حالت ديگر بيان كرد
.مدل حالتي كه در آن از متغير هاي حالت نا وابسته استفاده شده است: مدل حالت مينيمال ●
Teacher: Khoshnam Shojaei

ها سيستم رياضي توصيف :دوم فصل
: كنترل آرميچر DCمعادالت حالت و خروجي يك موتور : مثال●
( ) ( )tT t K i t=
( ) ( )be t K tθ=
( ) ( ) ( )tJ t b t K i tθ θ+ =
( ) ( ) ( ) ( )bdi tL Ri t V t K tdt
θ+ = −
: جريان-رابطه گشتاور
:Back EMFرابطه ولتاژ
:معادله مكانيكي بر اساس قانون اويلر
: براي مدار آرمچر KVLرابطه
Teacher: Khoshnam Shojaei

: كنترل آرميچر DCمعادالت حالت و خروجي يك موتور : مثال●
1
2
3
( ) ( ),( ) ( ),
( ) ( )
x t i tx t t
x t t
θ
θ
==
=
:متغير هاي فيزيكي زير را به عنوان متغير هاي حالت انتخاب مي كنيم
1 1 3
2 3
3 1 3
1( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( )
b
t
KRx t x t x t V tL L L
x t x tK Bx t x t x tJ J
=− − +
= = −
ها سيستم رياضي توصيف :دوم فصل
Teacher: Khoshnam Shojaei

: كنترل آرميچر DCمعادالت حالت و خروجي يك موتور : مثال●
1
2
3
( ) ( ),( ) ( ),
( ) ( )
x t i tx t t
x t t
θ
θ
==
=
:متغير هاي فيزيكي زير را به عنوان متغير هاي حالت انتخاب مي كنيم
1 1
2 2
3 3
( ) / 0 / ( ) 1/( ) ( ) 0 0 1 ( ) 0 ( )
( ) / 0 / ( ) 0
b
t
x t R L K L x t Lx t x t x t V t
x t K J B J x t
− − = = + −
A B
ها سيستم رياضي توصيف :دوم فصل
Teacher: Khoshnam Shojaei

1 1
2 2
3 3
( ) / 0 / ( ) 1/( ) ( ) 0 0 1 ( ) 0 ( )
( ) / 0 / ( ) 0
b
t
x t R L K L x t Lx t x t x t V t
x t K J B J x t
− − = = + −
A B :خروجي متغيري در نظر گرفته مي شود كه بايد كنترل شود
[ ]1
2 2
3
( )( ) ( ) 0 1 0 ( )
( )
x ty t x t x t
x tθ
= = =
C
ها سيستم رياضي توصيف :دوم فصل
Teacher: Khoshnam Shojaei

خطي هاي سيستم :سوم فصل
:LTI هاي سيستم حالت معادالت حل) :بگيريد نظر در را زير ديناميكي سيستم ) ( ) ( )
( ) ( )x t x t u ty t x
At
BC
= + =
( ) ( ) ( )x t A Bx t u t− = ( ) ( ) ( )At At Atx A Bt x t u te e e− − −− =
Ate−×
( ) ( )At Atd x t u tt
Bd
e e− − =
گيري انتگرال
0
00( ) ( ) ( )
tAtAt At
x t x t dBue e e τ τ τ−− −− = ∫
0
00
)( ( )( ) ( ) ( )t
tA t t A tx t x t Bu de e τ τ τ− −= + ∫
:زمان حوزه در حل :اول روش
Teacher: Khoshnam Shojaei

:فركانس حوزه در حل :دوم روش
:گيريم مي الپالس تبديل حالت معادله طرفين از
( ) ( ) ( )x t A Bx t u t= +
( ) (0) ( ) ( )sX s x AX s BU s− = +
( ) ( ) (0) ( )sI A X s x BU s− = +
1 1( ) ( ) (0) ( ) ( )X s sI A x sI A BU s− −= − + −
{ } { }1 1 1 1( ) ( ) (0) ( ) ( )x t L sI A x L sI A BU s− − − −= − + −
0
00
)( ( )( ) ( ) ( )t
tA t t A tx t x t Bu de e τ τ τ− −= + ∫
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:آوريد بدست را زير سيستم واحد پله پاسخ :مثال0 1 0
( ) ( ) ( )3 4 1
x t x t u t = + − −
13 4s
sI As−
− = +
1( ) ( )y t x t=
:حل
11 1 4 11( )
3 4 3( 1)( 3)s s
sI As ss s
−
− − + − = = + −+ +
4 1 4 1 01 1 1( ) (0)3 3 1( 1)( 3) ( 1)( 3)
s sX s x
s ss s s s s+ +
= + − −+ + + +
1 1( ) ( ) (0) ( ) ( )X s sI A x sI A BU s− −= − + − :داريد خاطر به
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:حل
3 3 3
3 3 3
3 2 31 1( ) (0)2 63 3 3
t t t t t t
t t t t t t
e e e e e ex t x
e e e e e e
− − − − − −
− − − − − −
− − − += + − − −
0(0)
0x
=
if ( )31( ) 2 32
t ty t e e− −= − +
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:)Similarity Transformation( همانندي تبديالت .هستيم دستگاه حالت فضاي از تري ساده هاي نمايش نيازمند پيشرفته كنترل مسائل در غالباً ,بخش اين در .كند مي تر ساده را سيستم پاسخ محاسبه حالت فضاي قطري نمايش ,مثال براي و حالت معادالت همانندي تبديالت گيري كار به با توان مي چگونه كه داد خواهيم نشان
:نمود تر ساده را ها تحليل و كرد تبديل ديگري هاي فرم به را ديناميكي هاي سيستم خروجي( ) ( ) ( )( ) ( ) ( )
x t x t u ty t
BC Dx t tA
u= +
= +
( ) ( )Tx t z t= :همانندي تبديل
)ثابت و ناويژه است(ماتريس تبديل حالت متغير حالت جديد
( ) ( ) ( )( ) ( ) ( )z t z t u t
yT A
t z t uT tT B
C D= +
= +
( ) ( ) ( )( ) ( ) ( )z t z t u t
yT A
t z t uT tT B
C D= +
= +
( ) ( )( )
1 1( ) ( ) ( )
( ) ( ) ( )
T AT T B
CT
z t z t u t
y t z Dt u t
− − = +
= +
خطي هاي سيستم :سوم فصل
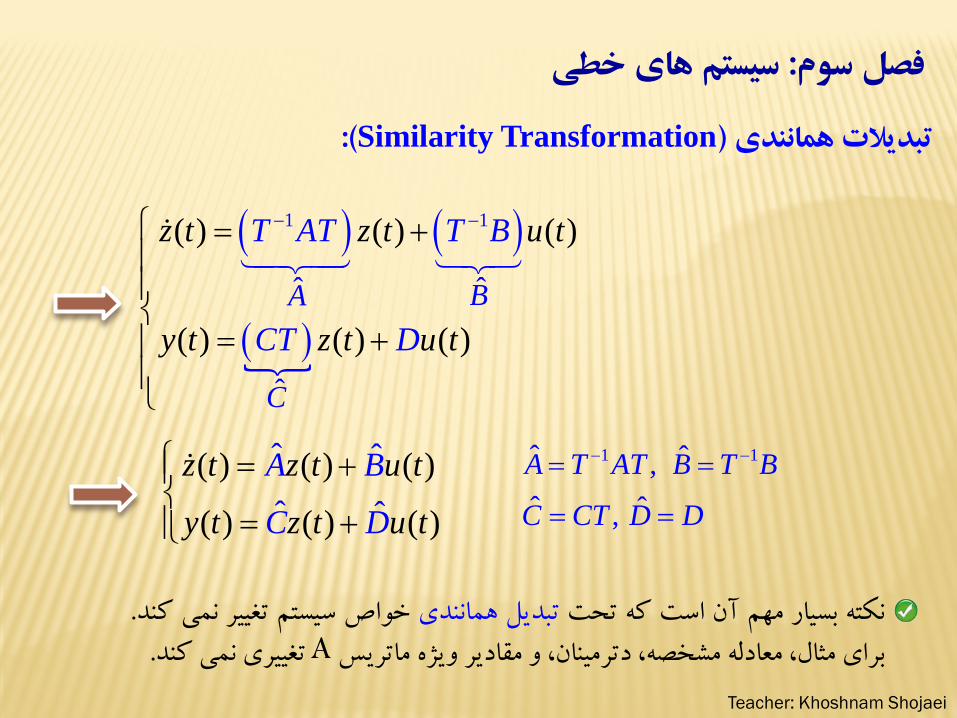
:)Similarity Transformation( همانندي تبديالت
( ) ( )
( )
1 1
ˆ ˆ
ˆ
( ) ( ) ( )
( ) ( ) ( )BA
C
T AT T Bz t z t u t
y t CT u tDz t
− − = +
= +
( ) ( )ˆ ˆ ( )
( ) ( )ˆ ˆ ( )
z t z t u t
y t z t u
A
t
B
C D
= +
= +
1 1ˆ ˆ,ˆ ˆ,
A T AT B T B
C CT D D
− −= =
= =
.كند نمي تغيير سيستم خواص همانندي تبديل تحت كه است آن مهم بسيار نكته .كند نمي تغييريA ماتريس ويژه مقادير و ,دترمينان مشخصه، معادله ,مثال براي
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei
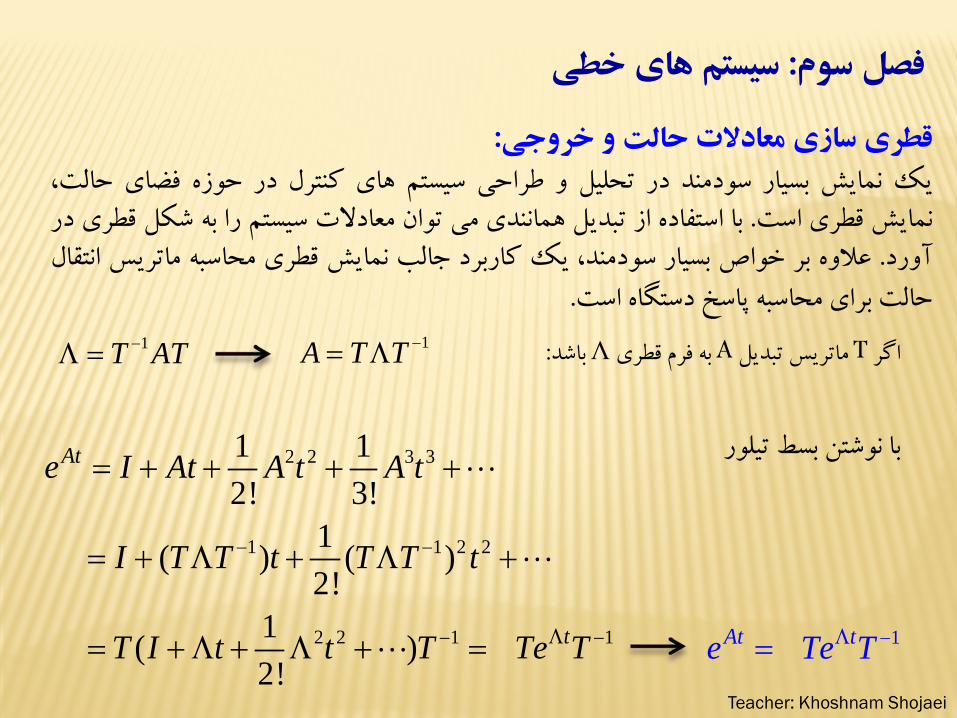
:خروجي و حالت معادالت سازي قطري ,حالت فضاي حوزه در كنترل هاي سيستم طراحي و تحليل در سودمند بسيار نمايش يك
در قطري شكل به را سيستم معادالت توان مي همانندي تبديل از استفاده با .است قطري نمايش انتقال ماتريس محاسبه قطري نمايش جالب كاربرد يك ,سودمند بسيار خواص بر عالوه .آورد
.است دستگاه پاسخ محاسبه براي حالت1T :باشد Λ قطري فرم به A تبديل ماتريس T اگر AT−Λ =
2 تيلور بسط نوشتن با 2 3 3
1 1 2 2
2 2 1 1
1 12! 3!
1( ) ( )2!
1( )2!
At
t
e I At A t A t
I T T t T T t
T I t t T Te T
− −
− −Λ
= + + + +
= + Λ + Λ +
= +Λ + Λ + =
1A T T −= Λ
1At te Te T −Λ=
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

1
21 2 1 2
0 00 0
[ , , , ] [ , , , ]
0 0
n n
n
A v v v v v v
λλ
λ
=
:خروجي و حالت معادالت سازي قطري :سازي قطري براي همانندي تبديل ماتريس محاسبه هاي بردار همان سازي قطري براي همانندي تبديل ماتريس هاي ستون كه شود مي ثابت ماتريس ويژه مقادير و ويژه ها بردار كه دانيم مي خطي جبر درس از .هستند A ماتريس ويژه
A كنند مي برقرار را زير رابطه:
, 1, 2, ,i i iAv v i nλ= =
1 2 1 1 2 2[ , , , ] [ , , , ]n n nAv Av Av v v vλ λ λ=
T
Λ
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:سازي قطري براي همانندي تبديل ماتريس محاسبه
AT T= Λ 1T AT− = Λ
:ويژه مقادير و ها بردار محاسبه
, 1, 2, ,i i iAv v i nλ= = ( ) 0i iA I vλ− =
iA ماتريس پوچ فضاي در ويژه هاي بردار يعني Iλ−دارند قرار. ) معادله ) 0i iA I vλ− 0iA كه دارد جواب صورتي در= Iλ− =
.دهد مي بدست را ويژه مقادير و شود مي ناميده مشخصه معادله ,معادله اين
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:ويژه مقادير و ها بردار محاسبه
5 12 2
A = −
:آوريد بدست را A ماتريس ويژه هاي بردار و مقادير :مثال
5 1det 0
2 2i I Aλ
λλ
− − − = = −
( )( )5 2 2 0λ λ− − + = 2 13, 4λ λ= =
1 4 :λ =
مقادير ويژه
11
12
1 10
2 2vv
− − =
11 12 0v v+ =
111
11
vv
v
= −
2 3 :λ = 21
22
2 10
2 1vv
− − =
21 222 0v v+ =
212
212v
vv
= −
2 2( ) 0A I vλ− =
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:ويژه مقادير و ها بردار محاسبه
:آوريد بدست را A ماتريس ويژه هاي بردار و مقادير :مثال
11 211 2
11 21
[ , ]2
v vT v v
v v
= = − − 1 2
1 1[ , ]
1 2T v v = = − −
11 1 1 5 1 1 1 4 0
1 2 2 2 1 2 0 3T AT
−
− Λ = = = − − − − −
141
3
1 1 1 10?
1 2 1 20
t
tAt t e
e Te Te
−
−Λ = = = − − − −
1 *1A AA
− =
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:جردن كانونيكال فرم
مستقل ويژه هاي بردار تعداد ,باشد داشته تكراري ويژه مقادير A ماتريس كه شرايطي در خواهد مشكل A ماتريس سازي قطري اين بنابر و باشد كمتر n از كه است ممكن خطي
اين به .كرد قطري تقريباً ها بردار از اي پايه با را A ماتريس توان مي خوشبختانه ولي .بود .شود مي گفته جردن فرم قطري تقريباً شكل :شود مي تشكيل جردن بلوك سري يك از كلي حالت در جردن فرم
1
2
1
0
0
P
P
P
k
n
JJ
J J α
λ
λ
+
=
1 0 00 1 0
10 0 0
PiJ
λλ
λ
=
بلوك هاي جردن
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:جردن كانونيكال فرم تكراري غير ويژه مقدار يك و تكراري ويژه مقدار سه داراي A ماتريس اگر ,مثال براي :بود خواهند زير صورت به جردن احتمالي هاي فرم ,باشد
1
1
1
2
0 0 00 0 00 0 00 0 0
J
λλ
λλ
=
1
1
1
2
1 0 00 0 00 0 00 0 0
J
λλ
λλ
=
1
1
1
2
1 0 00 1 00 0 00 0 0
J
λλ
λλ
=
1λ با متناظر جردن بلوك سه 1λ با متناظر جردن بلوك دو با متناظر جردن بلوك يك1λ
در )قطري تقريباً( جردن فرم به را A ماتريس كه هستيم بردارها از خاصي پايه دنبال به ما .شوند مي ناميده يافته تعميم ويژه هاي بردار ,ها بردار از خاص پايه اين .آورد
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:يافته تعميم ويژه هاي بردار محاسبه
غير ويژه مقادير و باشد m تكرار تعداد با تكراري ويژه مقدار يك A ماتريس كنيد فرض :باشند تكراري
21 11 1 , , ,, , ,, m m nλ λ λ λ λ λ+ +
m مقدار ويژه تكراري n-m مقدار ويژه غير تكراري
) :آيند مي بدست روبرو رابطه از ويژه هاي بردار اينكه به توجه با ) 0A I vλ− =
هاي پايه كه است كافي ,منظور اين براي .گرديم مي A-λI ماتريس پوچ فضاي دنبال به .كنيم پيدا را A-λI پوچ فضاي
( ) ( )rank I A null I A nλ λ− + − =
multiplicity
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei
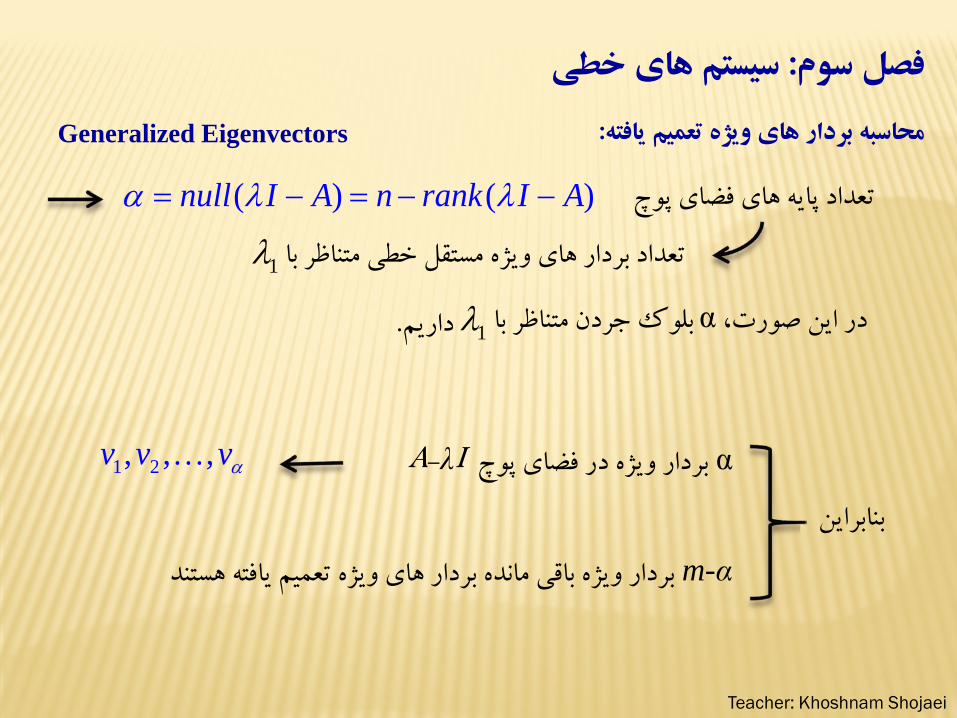
Generalized Eigenvectors :يافته تعميم ويژه هاي بردار محاسبه
( ) ( )null I A n rank I Aα λ λ= − = − − تعداد پايه هاي فضاي پوچ
1λ تعداد بردار هاي ويژه مستقل خطي متناظر با
.داريم1λ بلوك جردن متناظر با α, در اين صورت
بنابراين1 2, , ,v v vα α پوچ فضاي در ويژه بردار A-λI
m-α هستند يافته تعميم ويژه هاي بردار مانده باقي ويژه بردار
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:يافته تعميم ويژه هاي بردار محاسبه
1
2
12 1, 1
22 2, 1
2 , 1
1
2
11
21
1
, , ,
, , ,
, ,
,
,
,,
P
P
P
u uv
v
v
u
u u
u
uu
uαα αα α
−
−
−
1 2, , ,P P Pα
جردن هاي بلوك مرتبه1λ ويژه مقدار با متناظر
1 2P P P mα+ + + =
( ) 0A I vλ− =
1 ( 1) 1, 2,3, , , 1, 2, ,ij ij i j iAu u u j P iλ α− −= + = =
1 1 1i i iAu u vλ= +
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:يافته تعميم ويژه هاي بردار محاسبه0 1 0 00 0 1 00 0 0 12 7 9 5
A
= − − − −
:مثال
3( 1) ( 2) 0I Aλ λ λ+ = + + =
1,2,3 41 ( 3), 2mλ λ= − = = −
1
1 1 0 00 1 1 00 0 1 12 7 9 4
I Aλ
− − − − − = − −
( )4 3 1n rank I Aα λ= − −
= − =
خواهيم مي ويژه بردار سه 1- براي
يكي تنها ويژه بردار سه از كه دهد مي نشان اين :آورد بدست زير رابطه از توان مي را
( ) 0A I vλ− =
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:يافته تعميم ويژه هاي بردار محاسبه
:مثال1( ) 0A I vλ− = [ ]1 1 1 1 1 Tv = − −
11 121, ,uv u
[ ] 11 1( 1)A I u v− − = [ ]11 1 0 1 2 Tu = − −
[ ] 12 11( 1)A I u u− − = [ ]12 1 0 0 1 Tu = −
4 2 :λ = − [ ] 4( 2) 0A I v− − = [ ]4 1 2 4 8 Tv = − −
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:يافته تعميم ويژه هاي بردار محاسبه
:مثال1 1 1 1
1 0 0 21 1 0 4
1 2 1 8
T
− − − − = − − −
1v 11u 12u 4v
1
1 1 0 00 1 1 00 0 1 00 0 0 2
T AT−
− − Λ = = − −
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei

:كنيد قطري را زير ماتريس :تمرين1 1 20 1 30 0 2
A =
خطي هاي سيستم :سوم فصل
Teacher: Khoshnam Shojaei