netwrap: an ndn based real-time wireless recharging
TRANSCRIPT

NETWRAP: An NDN Based Real-Time WirelessRecharging Framework for Wireless Sensor
NetworksCong Wang1, Ji Li1, Fan Ye2, and Yuanyuan Yang1
1Department of Electrical and Computer Engineering, Stony Brook University, Stony Brook, NY 11794, USA2School of Electronics Engineering and Computer Science, Peking University, Beijing, China
Abstract—Using vehicles equipped with wireless energy trans-mission technology to recharge sensor nodes over the air isa game-changer for traditional wireless sensor networks. Therecharging policy regarding when to recharge which sensor nodescritically impacts the network performance. So far only a fewworks have studied such recharging policy for the case of using asingle vehicle. In this paper, we propose NETWRAP, an NDNbased Real Time Wireless Recharging Protocol for dynamicwireless recharging in sensor networks. The real-time rechargingframework supports single or multiple mobile vehicles. Employingmultiple mobile vehicles provides more scalability and robustness.To efficiently deliver sensor energy status information to vehiclesin real-time, we leverage concepts and mechanisms from NDN(Named Data Networking) and design energy monitoring andreporting protocols. We derive theoretical results on the energyneutral condition and the minimum number of mobile vehiclesrequired for perpetual network operations. Then we study howto minimize the total traveling cost of vehicles while guaranteeingall the sensor nodes can be recharged before their batteriesdeplete. We formulate the recharge optimization problem intoa Multiple Traveling Salesman Problem with Deadlines (m-TSPwith Deadlines), which is NP-hard. To accommodate the dynamicnature of node energy conditions with low overhead, we presentan algorithm that selects the node with the minimum weightedsum of traveling time and residual lifetime. Our scheme notonly improves network scalability but also ensures the perpetualoperation of networks. Extensive simulation results demonstratethe effectiveness and efficiency of the proposed design. The resultsalso validate the correctness of the theoretical analysis and showsignificant improvements that cut the number of nonfunctionalnodes by half compared to the static scheme while maintainingthe network overhead at the same level.
Index Terms—Wireless sensor networks, mobile vehicles, nameddata networking, wireless recharging, mobile energy replenishing,perpetual operation, recharge coordination.
I. INTRODUCTION
Wireless energy transmission technique [1], [2] has openedup a new dimension to power wireless sensor networks. Com-pared to opportunistic energy harvesting techniques [3], [4]where the energy supply is not always available, it deliversenergy to sensor nodes reliably without the complication ofwires or plugs. Mobile charging vehicles (called SenCars[19] in this paper) equipped with charging devices can movearound the field and replenish node energy conveniently. Therecharging policy - when and which SenCar should rechargewhich nodes and in what order - critically impacts the efficiencyand thus the lifetime of the network.
So far a few works [11], [12] have studied the rechargingpolicy problem. In [11], an optimization problem to max-imize the ratio of recharging time to vehicle’s idling time
is considered. In [12], the recharge problem is studied in arelatively static setting where nodes report their energy levelsperiodically, and a centralized algorithm computes a specificorder so that a single SenCar recharges selected nodes in thenext cycle. Then a system-wide optimization is performed tominimize the distance traveled by the SenCar and maximizethe network utility. Although commendable first steps, severalimportant practical issues are not considered in the static settingin [11], [12], which may limit its applicability in real networkenvironments.
First, the timely, efficient and scalable gathering of energystatus information of nodes and its delivery to mobile vehiclesare important and challenging issues in themselves. The pre-vious works do not consider these problems and assume thatsuch information is readily available. Second, it takes nontrivial(e.g., 30-80 min) time to recharge a commercial off-the-shelfbattery. Finishing one round of recharging for a network of afew hundred nodes may take several days. During this timethe energy levels of nodes may have changed significantlydue to unpredictable external events that can trigger extensiveactivities and quickly drain the battery. The recharging policycomputed at the beginning of the cycle is no longer optimal.This can cause energy depletion on some nodes, leading todisruptions to network functions. Third, these algorithms aredesigned for a single SenCar, which has limited rechargingcapacity and supports networks of only limited sizes. MultipleSenCars can support larger networks, but new algorithmsmust be designed to disseminate energy status information toSenCars and coordinate the recharging activities among themefficiently to best leverage their recharging capacities. Finally,the works in [11], [12] use centralized algorithms with highcomplexity, which may incur extra overhead in computing theoptimal solution and may not scale to large network sizes.Because of these practical challenges, a distributed solution ismore desirable and efficient in real network environments.
In this paper, we propose a novel real-time energy monitoringand recharging framework that optimizes the recharging poli-cies of SenCars under dynamic network conditions. Instead ofletting nodes report their energy levels only after a long periodas in [11], [12], a scalable and efficient energy informationaggregation protocol gathers battery energy levels continuouslyfrom all sensor nodes upon requests by SenCars. The SenCarsreceive such information and make recharging decisions basedon the latest energy information. To deal with unpredictableemergencies where nodes may dramatically drain the batteryin short time, the recharging of sensor nodes whose energy

levels are below a critical threshold has higher priority andtakes precedence over those that can work for relatively longertime with their residual energy.
To ensure high scalability of the proposed framework, weapply Named Data Networking (NDN) [14] techniques to gatherand deliver energy information to SenCars. To this end, wedivide the network in a hierarchical fashion and the energyinformation is aggregated bottom-up through different levels.NDN uses names instead of locations to address data, which isa natural match for aggregated energy information that belongsto an area instead of any particular node. Thus the aggregatedenergy information can be addressed by the area’s name. NDNalso supports mobile vehicles because it has mechanisms toconstantly update the routing states in intermediate nodes tofollow the movements of vehicles. This is important for theSenCars to receive the energy information timely after moving.
Due to the unpredictable nature of external events, theSenCars may need to deal with multiple concurrent emer-gencies occurring at different locations. How to schedule andcoordinate the SenCars to recharge these nodes within theirresidual lifetimes while minimizing the cost of SenCars iscalled the Emergency Recharge Optimization with MultipleSenCars (EROMS) problem in this paper. We first investigatethe necessary conditions for perpetual operations of the networkbased on energy neutral requirement (i.e., the energy consumedshould be less than or equal to the energy replenished) andformally derive the minimum number of SenCars needed tosatisfy this condition. Then we show that the EROMS problemcan be formulated as a Multiple Traveling Salesmen Problemwith Deadlines (m-TSP with Deadlines) [35], which is NP-hard.Although heuristic algorithms exist for m-TSP with Deadlines,they are not suitable in our context. First, most of them assumean unlimited number of vehicles while the number of SenCarsin our problem is limited. Second, these algorithms consider arelatively static input where the locations to be visited do notchange over time. However, in our context, new emergenciesmay appear and old ones may be resolved as SenCars rechargenodes. Finally, these algorithms may produce unbalanced work-loads among SenCars such that some SenCars can be idle whileemergencies still exist. Therefore, we propose a new heuristicalgorithm to address such deficiencies; it decides which nodesto recharge through a weighted sum of the traveling timeand residual lifetime of sensor nodes. We also analyze thecomplexity of our algorithm and demonstrate its performanceto meet dynamic battery deadlines.
We conduct extensive simulations to demonstrate the ef-fectiveness and efficiency of our framework. We trace theprocess of energy consumption and replenishment, the numbersof emergencies and nonfunctional nodes in different networksettings. The results demonstrate that our framework is scalableto networks with hundreds of sensor nodes while ensuring theperpetual operation. Then we compare with the static optimiza-tion approach [12] in terms of the fraction of nonfunctionalnodes and response time to emergencies. The results showgreat improvements on reducing the number of nonfunctionalnodes and shortening the response time to emergencies. Wealso validate our theoretical results on energy neutral conditionthrough simulations. Given the network and SenCar parame-
ters, network administrators can easily estimate the minimumnumber of SenCars needed for perpetual operations.
We make the following contributions in this paper. First, wepropose a novel real-time recharging framework for wirelesssensor networks, consisting of a set of scalable and efficientNDN-based energy aggregation and gathering protocols. Theprotocols satisfy both normal and emergency recharging needsfor multiple mobile vehicles. Second, we formally analyzethe conditions for the minimum number of SenCars neededfor perpetual operations. Third, we formulate the emergencyrecharge optimization with multiple SenCars as an m-TSP withDeadlines problem, and further propose an efficient heuristicalgorithm suitable to sensor recharging context. Finally, weconduct extensive simulations to demonstrate the effectivenessand efficiency of the framework, compare with existing solu-tions and validate the correctness of the theoretical analysis.To the best of our knowledge, this is the first effort to applyNDN techniques in sensor networks to make recharge decisionscapable of adapting to dynamic network conditions such asemergencies. It is also the first attempt to derive and validate thetheoretical minimum number of vehicles needed for perpetualnetwork operation, and the first to formalize the schedul-ing/coordination of multiple vehicles’ recharge activities whilemeeting sensor battery deadlines and minimizing total travelingcost of vehicles.
The rest of the paper is organized as follows. Section IIdiscusses related work. Section III outlines the framework andassumptions made in the network model. Section IV describesthe operations and mechanisms of our protocol followed bySection V and Section VI on deriving the minimum number ofSenCars and solving the EROMS problem, respectively. Finally,Section VII presents the simulation results and Section VIIIconcludes the paper.
II. RELATED WORK
A. Wireless Rechargeable Sensor Networks
Recently, there have much research efforts in wireless energytransmissions from both academia and industry [5], [6], [7],[8], [9], [10], [11], [12], [13]. In [6], the impact of wirelesscharging technology on sensor networks is investigated usingdevices from Powercast [5] which are based on radio frequencyharvesting, and heuristic algorithms are developed to solve thedeployment and routing problem. In [7], deployment problemsare studied in a rechargeable sensor network built from anindustrial wireless sensing platform and commercial off-the-shelf RFID readers. In [8], an O(k2k!) greedy algorithm isdesigned to find a recharge sequence to maximize the lifetimeof sensor nodes using wireless charging, where k is the numberof nodes in the recharge sequence. Experimental tests usingPowercast devices and insights of wireless energy replenish-ment are also presented. In [9], a joint routing and wirelesscharging scheme is proposed to improve network utilization andprolong network lifetime. Implementations based on Powercastdevices and typical sensor nodes have been considered.
However, techniques based on radio frequency harvestingare hindered from large deployments due to relatively lowefficiency. The seminal works [1], [2] of resonant inductivecoupling based wireless energy transmission are capable of

transferring a large amount of energy in short time with highefficiency. Several works [10], [11], [12], [13] consider usingresonant inductive coupling to recharge sensor batteries. In[10], batteries are allowed to be partially charged and variousrecharging schemes to traverse the sensing field are explored. In[11], the problem of periodic recharging each sensor node usinga single mobile vehicle is considered. A near-optimal solution isprovided to calculate the optimal traveling path of the mobilecar, by constructing the shortest Hamilton cycle through allsensor nodes. In [12], the problem of jointly optimizing theeffective energy recharging and data collection with boundeddata latency is studied. A two-step approach is proposed torecharge nodes with the least residual energy while maximizingnetwork utility. In [13], collaboration among multiple vehiclesto recharge not only the sensor nodes but also each othervehicles in a line (1-D) network is studied so that a largernetwork can be covered and vehicles can come back to thestarting point.
The above work makes pioneering steps in wireless recharge-able sensor networks. However, several important practicalissues are not considered. First, in a practical 2-D network,a single recharging vehicle cannot scale to large networksizes. The recharge coordination problem of dispatching whichvehicle to recharge which sensor node so as to minimize thetotal traveling cost is not studied. Second, how real-time energyinformation can be aggregated and reported to mobile vehiclesefficiently is not considered. Third, the dynamic changes inenergy levels that occur inevitably and unpredictably duringlong recharging cycles are not handled.
B. Named Data Networking (NDN)
Named Data Networking is a new network architectureproposed recently for the Internet [14]. In NDN, data areaddressed by their names instead of hosting nodes’ locations.The operation is based on two types of messages, Interestand Data, and the communication is initiated by the receiver.A receiver interested in certain data sends Interest messagescarrying the name of the desired data. The Interest messagepropagates in the network following FIB (Forward InterestBase) states towards nodes hosting desired data. It also leavesa “trail” of PIT (Pending Interest Table) states in intermediatenodes. Once the Interest reaches a node hosting the desireddata, Data messages can follow PIT states to traverse back tothe receiver.
So far NDN research has largely focused on the Internet, withsome efforts on mobile networking. Whether it can be used tosatisfy the needs of wireless sensor networks is still unexplored.In this paper, we use wireless recharging as a case study toinvestigate its applicability in wireless sensor networks. We findthat its hierarchical naming structure fits naturally with energyaggregation needs, and its inherent ability to handle mobilereceivers is attractive for information delivery to rechargingvehicles.
C. Coordination of Mobile Vehicles
Adopting multiple mobile vehicles has been studied for datacollection in wireless sensor networks. In [15], a stochasticmodel is presented to evaluate the performance of data collec-tion when the vehicles follow a symmetric random walk on a
2-D grid topology. In [16], multiple controlled mobile vehiclesare adopted for data collection and the objective is to achieveload balancing. In [17], a set of heuristics are proposed toschedule the data collection of multiple mobile vehicles to meetsensors’ dynamic buffer overflow time constraints. A sensormay be visited by one or more mobile vehicles depending onits buffer status. In [18], a set of protocols are proposed toachieve spatial coverage equivalence, vehicle mutual avoidanceand load balancing. In [20], the problem of minimizing thetotal traveling cost of multiple mobile vehicles is studied. Itformalizes the problem into covering salesman problem andpresents a tour-planning heuristic. All the existing work focuseson data collection where mobile vehicles only need to coversensors in their transmission ranges, and a sensor may be visitedby one or more vehicles during a short period. However, inwireless energy replenishment, the effective wireless rechargingrange is very short compared to data transmissions, while usingmultiple mobile vehicles to recharge the same sensor nodeincurs high cost and should be completely avoided.
III. A NOVEL FRAMEWORK FOR WIRELESSRECHARGEABLE SENSOR NETWORKS
In this section, we describe the components, network mod-el and assumptions for our NDN-based wireless rechargingframework (NETWRAP). NDN has a few attractive benefits forour environment. First, by sending out new Interest packets,a mobile receiver can continuously update the routing states(i.e., PIT entries) in intermediate nodes. Data can follow thereverse paths traversed by the most recent Interest packets andreach the new location of the receiver. This solves the mobilityissue of SenCars and ensures that the latest energy informationcan reach them in a timely manner. Second, to scale to largenetwork sizes, we divide the network in a hierarchical fashionand energy information is gathered in aggregated forms. Thusthe data are bounded to an area rather than any particularnode. This makes a natural fit for NDN: the data can beaddressed by the area’s name. Compared to a flat topologythat requires flooding messages throughout the network, suchhierarchical aggregation reduces considerable overhead by con-fining message propagation to parts of the network. Third, NDNprovides network robustness when intermediate nodes fail. Thisis ensured by resending the Interest packet by the receiver whendata do not arrive. The new Interest packet explores alternativeroutes to bypass failures [14].
A. Network Components
The network consists of the following components.SenCars and Service Station: SenCars query the network
for energy information and recharge nodes based on theenergy information collected. A service station is used fornetwork management and maintenance. The SenCars can becommanded by the administrator via the service station thathas computing and communication capabilities.
Head nodes: A head is a sensor node delegated to aggregateenergy information from its subordinate area. When requestedby a SenCar or by the head of its upper level, a head queriesenergy information from subordinate sub-areas at the lowerlevel, aggregates such information and sends to the requester.

Level 1
Level 2
Normal Node
Head Node
Proxy Node
SenCar
Battery Status
Recharging
Moving
Direction
a
a/a
a/b
b
b/a
b/b
a/a/2
Service
Station
Fig. 1. Illustration of area names and network components.
The head node can be changed dynamically depending on itsenergy.
Proxy: An emergency occurs when a node’s residual energyfalls below a pre-determined emergency threshold (e.g., 10%).Such events need to be taken care of immediately. A proxynode aggregates emergencies from sensor nodes and reportssuch information to the SenCar when queried. Only top-levelhead nodes are proxies.
Normal Node: A sensor node not selected as a head is anormal node. It reports energy information to head nodes, orsends emergency directly to its proxy when its energy leveldrops below an emergency recharge threshold.
B. Name Assignments and Network Model
We assume sensors are scattered uniformly randomly inthe network. The network is divided into several areas andeach area is further divided recursively. The division of thearea is based on geographical coordinates of the sensing field.Each division generates some new sub-areas and increases thenumber of levels in the network. This process repeats until thebottom level subarea becomes small enough such that duringthe time a SenCar recharges such a subarea, the normal energylevels of the network do not change too much to warrantinterruption of that recharge. Fig. 1 gives an example of a 2-level network with 2 areas (solid lines), each further split into2 sub-areas (dashed lines), where each sub-area on the secondlevel contains about 10 sensor nodes.
Based on the results of area divisions, we assign NDNdata names for different subareas in a hierarchical manner.For example, Fig. 1 shows all the name assignments fordifferent subareas (e.g., the first level areas are “a” and “b”,and the second level has “a/a", “a/b", . . . ). Thus each subareais identified by its unique hierarchical name. Each node has anID including the name of its containing bottom-level subareaplus an identifier. For example, “a/a/2” is node “2" in subarea“a/a”. The hierarchical names make it easy to confine thepropagation scope of a message to any subarea: nodes beyondthe intended subarea (carried by the message) can simply stopfurther propagation.
In addition, we have the following assumptions: 1) Sensornodes are stationary and each node knows its location. 2) Nodeshave the same transmission range and messages are forwardedover multiple hops in large networks. 3) The SenCars havepositioning systems and know their locations. The IDs andlocations of all sensor nodes, and the subarea names are knownto the SenCars (e.g., through a one-time effort during network
initialization). 4) The SenCars are equipped with powerfulantennas so that they can communicate among themselves andto the service station directly using long range communicationtechnologies (e.g., cellular, WiMax). 5) Sensors might performdifferent tasks thus the energy consumption is not uniformamong nodes. 6) When a SenCar finds that its own energyis about to deplete, it moves back to the service station forbattery replacement. Since the traveling and battery replacingtime is short compared to recharge time, we ignore the timefor SenCar’s battery replacement. 7) The SenCar can approachsensors in close proximity and induce enough currents onsensor’s receiving coils for battery recharge.
IV. THE NDN-BASED REAL-TIME WIRELESSRECHARGING PROTOCOL
In this section, we present the detailed design of NETWRAP.We first give an overview of the protocol design in SectionIV-A. Then we describe different operating phases of theprotocol in Section IV-B.
A. Protocol Overview
In NETWRAP, the SenCars obtain the most up-to-dateenergy information from sensors and makes recharge decisionsin real time. The energy information is aggregated on headnodes at different levels. To be robust, the head is usuallyselected as the node having the maximum energy level in itsarea. This selection process is done at the beginning of networkstartup through the propagation of head selection messages.The details will be discussed in the next subsection.
To start energy information collection, SenCars send outenergy interest messages to poll the heads on the top-level.Once the heads receive such messages, they send lower levelenergy interest messages to their child-heads in respectivesubordinate areas. This process is repeated down the headnode hierarchy, until finally the bottom-level energy interestmessages reach the nodes in the bottom-level subareas.
Once a sensor node receives a bottom-level energy interest,it responds by sending out an energy message containing itsID and battery level. When the heads on the bottom-levelreceive such energy messages, they select sensor nodes withenergy level below a normal recharge threshold (defined bythe administrator), and send the names of these nodes andtheir energy information in an energy message to their parenthead nodes. This is repeated up the head node hierarchy, untilfinally the top-level head nodes have the aggregated energyinformation and send it to the SenCar. When multiple SenCarsquery energy information simultaneously, the top-level headnodes send the aggregated energy information to the nearestSenCar. Thus SenCars recharge nearby normal nodes to reducetheir travel costs. The details are explained later in this section.
To reduce transmission overhead, the head is delegated par-tial responsibilities to pre-select sensor nodes to be recharged.At the bottom level, this is done by letting heads select nodeswith low energy levels. At upper levels, a head selects thesubordinate area which can be recharged with the most amountof energy. Thus the SenCars can replenish the network withmore energy in one movement.
Such normal energy aggregation is conducted at the requestsof the SenCars. For emergency nodes that have dangerously

low battery levels below an emergency threshold, they sendout emergency messages to the proxy that manages its area.The route to its proxy is built by head selection messages fromthe proxy.
After completing the recharge of any node, a SenCar sendsout an emergency interest message to query whether any emer-gency has appeared. These messages are directed to proxieswhere lists of emergency nodes are stored. The proxies respondby sending back the emergency node IDs, estimated residuallifetimes and energy levels. SenCars receive the messages anduse the emergency recharge algorithm to decide which nodesto recharge. Note that different from normal recharging, theSenCar recharging an emergency node may not be the nearestone. This is due to the urgency to avoid any battery depletion.When a head node is low on energy, it can choose another nodewith high energy, and send out a head notification message tonotify the latter to become the new head.
B. Protocol Design
We describe the detailed protocol assuming the head hierar-chy has l levels.
1) Head Selection: After the areas and names have beenconfigured, the network performs head selection from thebottom up starting at the l-th (i.e., the lowest) level. Sinceinitially sensor nodes have about the same level of energy, anyof them may become a head. Each sensor node i generates arandom number x. If x > K, where K is a pre-determinedthreshold, the node floods a head selection message in its l-thlevel subarea, containing the name of this subarea, xmax = x,and IDmax set to its own ID. Otherwise the node waits formessages from other nodes in the area.
A node receiving such a head selection message comparesthe xmax in the message with its local record xmax. If its localrecord is larger, the message is discarded. Otherwise, the sensorupdates its local xmax to that in the message, sets IDmax tothat in the message, and forwards the message to its neighborsexcept the node that sent this message. Finally, the node withthe maximum x wins the election and is recorded by all thenodes in this subarea as the head.
New heads at the l-th level then contend to become heads ofthe (l − 1)-th level. They flood new head selection messagesin the (l − 1)-th level subarea, carrying the area’s name, theirrespective x values and IDs. Intermediate nodes perform similarcomparisons. This will elect the heads at the (l − 1)-th level.This process is repeated recursively until head nodes of alllevels are elected.
One difference for the head selection messages startingfrom the (l − 1)-th level and up is that messages carryingsmaller x than the local copy are not discarded. Instead,they are propagated throughout the respective subarea. Thisbuilds routing states in intermediate nodes of the subarea: Anintermediate node has one entry for each child-head, pointingto the neighbor from which the message from that head arrivesfirst. Duplicate copies of the same message arriving later arediscarded.
Such states are effectively FIB (Forward Interest Base)entries in NDN. Later a parent head at the (k − 1)th-level cansend energy interest messages to its child-heads at the k-thlevel using such states. To build FIB entries for the 1st level
Layer 0Sensor Node
Head Node
Subareas
Wireless Links
Direction of Energy
Information
SenCar
Layer 1
Layer 2
Energy Interest Message
Fig. 2. Example normal energy information convergence.
head nodes, they each flood a top-level head selection messagethroughout the whole network. Later the energy interest queriesfrom the SenCars can use such states to reach them.
2) Normal Energy Interest Propagation: After the head hier-archy is constructed, the SenCars send energy interest messagesto query for nodes needing recharge. The energy informationis gathered on demand, and top down in the hierarchy. We willdescribe normal energy information collection first. Emergencyinformation is collected similarly, but with only top-level headsinvolved to reduce latency.
For normal energy information, interest messages are sent bythe SenCars (e.g., with data name set to “/energy/normal/a" tocollect energy information from area a). Intermediate nodes usethe FIB entries established by top-level head selection messagesto forward it to all top-level head nodes. To guide the returnof future data from a top-level area, an intermediate node alsosets up a PIT (Pending Interest Table) entry pointing to theneighbor from which the interest message towards this area isreceived. Fig. 2 gives a pictorial illustration of a network with3 levels. After an interest message is sent by the SenCar, theenergy information is converged from the bottom level to thetop level towards the SenCars.
To avoid duplicate selection of the same normal nodesand reduce travel costs, we want only the nearest SenCarto receive a head node’s normal energy information. To thisend, the energy interest message from each SenCar carries ahop count increased by one at each intermediate node. Whenmultiple such messages towards the same top-level area arereceived, an intermediate node updates its PIT entry to recordonly the neighbor sending the message with the smallest hopcount. Later energy information from a head can follow suchdirections to reach the nearest SenCar. After an intermediatenode forwards energy information from a top-level area, itdeletes the corresponding PIT entry.
Upon receiving an energy interest message, a top-level headsends a new energy interest message to its child-heads, withthe data name set to all subareas of its children (e.g., fromthe head node of area /a, “/energy/normal/a/*"). Similarly,these messages reach all child-heads following FIB entries.Intermediate nodes also set up PIT entries so that later energyinformation from child-heads can go back to their parent head.This process is repeated down the hierarchy, until finally headsat bottom-level flood their respective subareas with interestmessages.
3) Normal Energy Report and Node Recharge: When asensor node receives an l-th level energy interest message, itresponds with an energy message including its ID and residualenergy. With the help of PIT entries, the message is returned

to the head of the l-th level.
The head examines if the reported residual energy is lessthan the normal recharge threshold. If so, the ID of the node isadded to a list, and the energy that can be recharged to this nodeis added to a summation counter. After the head has collectedthese messages, it sends an aggregation message, containing thelist, the summation counter and its subarea name to its parenthead. A parent head compares such messages from its child-heads, selects the one with the largest summation counter (i.e.,the bottom-level subarea that can be recharged of the greatestamount of energy), and forwards to its parent head. This processis repeated upwards in the hierarchy. Finally, the SenCar nearestto a top-level head receives a message for the bottom-levelsubarea with the largest summation counter. It moves there andrecharges those nodes in the ID list one by one. Only afterrecharging those nodes will the SenCar sends another normalenergy query.
The reason we delegate selection partially to head nodes istwofold. First, we expect much less variation in normal energylevels. Thus the SenCar can choose one bottom-level subareaand finish recharging all listed nodes. Only after the wholesubarea is recharged, we expect enough changes in normalenergy distribution that warrants a new normal energy queryfrom the SenCar. Second, this also keeps the return messagesizes small and reduces overhead.
4) Emergency Energy Report and Node Recharge: Emer-gency energy report is slightly different due to the urgency.If a node detects that its energy level is below the emergencyrecharge threshold, it immediately sends an emergency messagecontaining its ID and energy level to its proxy (i.e., its top-levelhead node). Because the head node floods a top-level headselection message during head election, the same FIB entriescan be used to forward emergency messages to the head.
Instead of waiting for recharging a whole bottom-levelsubarea, a SenCar sends out emergency interest messagesto each proxy after finishing recharging any single normalnode or emergency node (e.g., with data name set to “/en-ergy/emergency/a" to collect emergency information from theproxy of area a). To guide the return of future data from theproxy of a top-level area, an intermediate node sets up a PITentry pointing to the neighbors from which the emergency in-terest messages towards this area are received. Later emergencyinformation from a proxy can follow such directions to returnto the SenCar. After an intermediate node forwards emergencyinformation from a proxy, it deletes the corresponding PITentry.
When an emergency interest message is received, the proxyreturns its list of IDs, energy levels and estimated residuallifetime of emergency nodes, if there exists any. Comparedto normal recharge that maintains nodes’ energy at mediumlevels so that they do not deplete energy very soon, emergencyrecharge requires more accurate information on how long anode can last, i.e., an estimation of the residual lifetime. In thispaper, it is calculated by taking a weighted sum of the estimatedresidual lifetime in previous time slots. The estimated lifetimeLi at time slot i is obtained by dividing the current energyconsumption rate from residual energy. Li can be obtained by
a weighted average of previous lifetime at n time slots
Li =Li−n + Li−n+1
2n+
Li−n+2
2n−1+ · · ·+ Li
2.
For simplicity, we restrict the previous lifetime n used in thecalculation to 3. For example, the estimated residual lifetimein time slot t0, t1, t2 and t3 is calculated as L0, L0/2+L1/2,L0/4 + L1/4 + L2/2, and L0/8 + L1/8 + L2/4 + L3/2,respectively. We can see that our estimation gives a dominatedweight of lifetime in the current slot, which is similar toestimating process time in operating systems [37].
The SenCar uses the algorithm in Section II to decide whichnode to recharge. It switches back to normal operation modeonly when no emergency is reported. When multiple SenCarsquery emergency information simultaneously, they coordinatewith each other and make an optimal decision to assign theemergency nodes to each of them. The procedure of emergencyassignment is described in Section II.
5) Head Hierarchy Maintenance: A head can be short onenergy, which can happen once in a while because the headusually engages in more activities than a normal node. Whenthis happens, a new head is needed. Because only heads ofbottom-levels contend for higher level elections, a head atany level is always the head of its bottom-level subarea. Itreceives the energy reports from normal nodes in its bottom-level subarea upon the normal interest query from the SenCar.So it can choose a node with the highest energy, and floodsa head notification message to notify all nodes in the bottom-level subarea of the new head.
The new head then triggers a new head election process inits (l− 1)-th level subarea. It propagates a new head selectionmessage in its (l − 1)th subarea, but carrying its energy levelinstead of the random number x. Other heads in this (l− 1)-thlevel subarea do the same. Then a new (l − 1)-th head withthe maximum energy is elected. If this is the same head, theprocess stops. Otherwise, the new (l−1)-th level head triggersthe same process in its upper level subarea, until finally anew top-level head is elected. Note that although our headselection and maintenance scheme shares some similaritieswith previous studies [21], in our scheme, NDN techniquesare adopted to provide scalable communication between headnodes of different levels, which is new compared to previouswork.
V. THEORETICAL ANALYSIS OF ENERGYNEUTRALITY AND MINIMUM NUMBER OF
SENCARS
In this section, we study a couple of important theoreticalquestions. Given a sensor network, what is the necessarycondition for it to operate perpetually and what is the minimumnumber of SenCars needed to satisfy this condition? For arechargeable sensor network to operate perpetually, the energyneutral condition must be satisfied, i.e., for each sensor nodethe energy replenished is no less than the energy consumed inany arbitrarily long time period.
We use a simple Bernoulli process to model a node’s energyconsumption: with probability p it consumes unit energy in aunit time slot [23]. The assumption is quite natural for mostof the sensing applications. For example, in an event-based

TABLE ITABLE OF NOTATIONS
Notation DefinitionN Set of sensor nodes with N elementsM Set of emergency nodes with M elements
at the time when SenCar makes a queryS Set of SenCars with S elementsN Number of sensors in the networkp Probability a node consumes unit energy in a time slotn Number of time slotsRn Energy replenished for a node in n time slotsEn Energy consumed for a node in n time slotsE0 Initial energy of a sensor nodeC Total battery capacitytr Maximum recharge time of a sensor nodeti Recharge time of node iα Weight parameter α ∈ [0, 1]L Set of residual lifetime of emergency nodes
0 20 40 60 80−20
0
20
40
60
80
100
120
Time (in mins)
Rec
harg
ed B
atte
ry C
apac
ity (
%) Modeling of Recharge Time Function
Recharge function 6th degree approximation
Fig. 3. Recharge function and approximation function by Matlab curve fitting.
sensor network, events occur sporadically and are governed bya Poisson distribution. Once the unit time slot is small enoughsuch that only one event can occur during a unit time slot, thePoisson distribution is equivalent to Bernoulli distribution [24].A long time period consists of n unit time slots. Let Rn andEn denote the energy replenished and consumed for a sensornode in n time slots, respectively, and E0 denote the node’sinitial energy. Table I summarizes the general notations andtheir corresponding definitions in this paper.
In principle, wireless recharge is limited by how fast the coilcan transfer energy (induction between two coils) and how fastthe battery can absorb energy. The lesser of the two determinesthe recharging rate. We assume that the transmitting coil caninduce enough recharge currents on the receiving coil. Resonantinductive coupling based wireless energy transfer can easilyachieve this. It has been shown [1] that it can transfer 60 wattsof power in excess of 2 meters. When the recharge currentis high enough, the recharge time depends on how fast thebattery can absorb the charge, which is a battery characteristic.To model the relation between battery capacity and rechargetime, we use an example of Panasonic Ni-MH AAA batterieswith 780 mAh based on available curves from the data sheets[22]. The instantaneous voltage at time instance t is mappedto capacity ratio and the resultant recharge time function isshown in Fig. 3. Then we use curve fitting in Matlab to obtainan approximation function. 1
1The 6-th degree polynomial equation gives a closed approximation to theoriginal recharge time function c(t) = −2.7872×10−8t6+6.814×10−6t5−6.138 × 10−4t4 + 0.02405t3 − 0.3541t2 + 2.12t − 2.526 where t is therecharge time.
The energy neutral condition is
Rn + E0 ≥ En (1)
Eq. (1) states that for a long time period n, on each sensornode, the sum of replenished energy and initial energy shouldbe at least as large as the consumed energy. This is a necessarycondition for the perpetual operation of the network.
From Eq. (1), we can derive the minimum number ofSenCars needed, S. We first estimate a loose upper boundfor Rn in terms of S. Since it is analytically intractable toobtain Rn, an upper bound can provide reasonable estimatesof the total recharge capabilities from the SenCars. Intuitively,SenCars reach their maximum recharging capacity when theycan “barely" keep up with the recharging needs, which meansthat they keep recharging node after node without any idle timein between, and each node has almost zero energy before beingrecharged. A SenCar can replenish at most the battery’s fullcapacity in the full recharge time2. During n time slots, the totalrecharged energy for the whole network is the recharge rate,(C/tr)S, times the time duration n (e.g., battery capacity C =780 mAh, full recharge time tr = 73.4 min for a Panasonic Ni-MH AAA battery [22]). The recharged energy Rn is averagedon each sensor node by dividing the number of sensor nodesN in the network. Thus, the upper bound of Rn is nCS
trN.
Note that on the right hand side of Eq. (1), En is a randomvariable. We have the following lemma.
Lemma 1. The probability for the energy neutral condition to
hold is Pop = Φ
(Rn+E0−np√
np(1−p)
).
Proof: Let X1, X2, . . . , Xn be independent and identicallydistributed Bernoulli random variables for energy consumption
in each time slot with probability p. En =n∑
i=1
Xi = nX . When
n is sampled over a long time period, by the Central LimitTheorem, we know X ∼ (p, p(1−p)
n ). Thus, En is also normallydistributed with µ(n) = np and variance σ2(n) = np(1 − p)(En ∼ N (np, np(1− p))) [25]. Hence,
Pop = PrRn + E0 > En = Φ
(Rn + E0 − µ(n)√
σ2(n)
)and the energy neutral condition holds with Pop.
Proposition 1. The minimum number of SenCars required toachieve perpetual operation is
S =
⌈trN(2.33
√np(1− p) + np− E0)
Cn
⌉Proof: Since Φ−1(1) → ∞, we consider the sensor net-
work achieves perpetual operation when Pop ≥ 0.99. In otherwords, to guarantee the sensor network to operate perpetually,the probability that the energy replenished is larger than theenergy consumed is 0.99. From Φ−1(0.99) ≤
nCStrN +E0−np√
np(1−p), we
obtain the minimum number of SenCar S.
2Different from [10], where partial recharge is allowed, we assume fullyrecharging batteries to avoid “memory effects” that can reduce the number ofcharge cycles, so that battery lifetime can be maximized.

To illustrate how Proposition 1 can be used to estimate theminimum number of SenCars, we consider a concrete examplecomprised of 500 sensor nodes with the recharge function ofPanasonic Ni-MH AAA batteries and calculate the minimumnumber of SenCars needed. Assume in an application thebattery can last for 5 days on average without recharge andthe energy consumption follows the Bernoulli distribution. Ityields µ(1) = 37.5mJ and σ2(1) = 9.4mJ2 for a timeperiod of 6 months in which each time slot is 1 second. UsingProposition 1, we can calculate S = ⌈2.41⌉ = 3 which meansit needs at least 3 SenCars to cover 500 nodes under thegiven energy consumption rate. We can see that the derivationfrom Proposition 1 can help the network administrator plan thenetwork. Once the experimental parameters and the applicationspecifics from the sensors have been determined (e.g., networksize N , recharge time tr, initial energy E0, working probabilityp, operation duration n and battery capacity C), we can easilyobtain the minimum number of SenCars needed. As will beseen later, the correctness of the derivation is also verified insimulations.
VI. EMERGENCY RECHARGE OPTIMIZATIONALGORITHM
In this section, we study the Emergency Recharge Optimiza-tion with Multiple SenCars problem (EROMS). Our objectiveis to minimize the total traveling cost of the SenCars whileguaranteeing recharge before sensors’ battery depletion. Weformalize this problem into a Multiple Traveling SalesmenProblem with Deadlines. We show the problem is NP-hard andpropose a heuristic algorithm suitable for dynamic real-timerecharging.
A. Problem Formulation
Given a set of SenCars S and a set of emergency nodesM, we formalize the problem as follows. Consider a graphG = (V,E), where V
(k)0 is the starting position of SenCar k,
and Vi (i ∈ M) is the location of emergency sensor i to bevisited. E is the set of edges. Each edge Eij has a latency costcij = ti + tij , where ti is the time to recharge node i fromits current energy level to full capacity, and tij is the travelingtime from node i to node j. For SenCar k, c(k)0j represents itscost from its initial position 0 to node j. For each sensor nodei, the residual lifetime is Li. Ai specifies the arrival time for aSenCar at sensor node i.
We introduce decision variables xij for edge Eij . Thedecision variable is 1 if an edge is visited, otherwise it is0. Additionally, x(k)
0j is 1 if SenCar k moves from its initialposition to node j. ui is the position of vertex i in the path. Wevirtually make the SenCars return to V
(k)0 after recharging all
the selected nodes by setting c(k)i0 = 0, i ∈ M, thus the EROMS
problem can be formulated as the Multiple Start TravelingSalesman Problem with Deadlines in which multiple travelingsalesmen start from different locations to visit a set of citieswithin their deadlines.
P1 : min
M∑i=1
M∑j=1
cijxij +S∑
k=1
M∑j=1
c(k)0j x
(k)0j
(2)
Subject toM∑j=1
x(k)0j =
M∑i=1
x(k)i0 = 1,∀k = 1, 2, . . . , S, (3)
M∑i=1
xik =M∑j=1
xkj = 1; ∀k = 2, . . . ,M, (4)
Ai ≤ Li; ∀i = 1, 2, . . . ,M, (5)xij ∈ 0, 1; ∀i, j = 1, 2, . . . ,M, (6)2 ≤ ui ≤ M ; ∀i = 2, 3, . . . ,M, (7)ui − uj + (M − S)xij ≤ M − S − 1;
∀i, j = 2, 3, . . . ,M, i = j. (8)
Constraint (3) guarantees that the recharge path starts at 0 andfinishes at 0. Constraint (4) ensures the connectivity of thepath and that every vertex is visited at most once. Constraint(5) guarantees that the arrival time of the SenCar is withinsensor’s residual lifetime. Constraint (6) imposes xij to be0-1 valued. Constraints (7) and (8) eliminate the subtour inthe planned route. The subtour elimination constraints areformulated according to [26], [27].
We now show that EROMS is NP-hard. The classic MultipleTraveling Salesman Problem (m-TSP) can be considered as aspecial case of the EROMS problem with the deadline to visita city extended from 0 to infinity, and all the SenCars startingfrom one position. A solution to the EROMS problem wouldgive a solution to m-TSP. Since m-TSP is known to be NP-hard [28], the EROMS problem is NP-hard.
B. Minimum Weighted Sum Heuristic Algorithm and Complex-ity Analysis
In this subsection, we propose a heuristic algorithm for theEROMS problem that jointly considers the residual lifetimeand traveling time. In general, m-TSP is closely related to theVehicle Routing Problem (VRP) in which a fleet of vehiclesstart from the same depot and visit client locations exceptthat in m-TSP, salesmen are allowed to start from differentlocations. The m-TSP with Deadlines can be considered asa special case of the Multiple Traveling Salesman Problemwith Time Windows (m-TSPTW)3. This problem is similar toVehicle Routing Problem with Time Window (VRPTW) whichhas been studied in the literature and a handful of optimal andapproximation algorithms are available [29], [30], [31], [32],[33], [34], [35], [36].
The approaches to VRPTW are usually divided into twophases. A construction of a feasible tour is sought in the firstphase and the tour is interactively improved in the secondphase. In [29], several heuristic algorithms are proposed and acomputational evaluation is presented to study the performance.In [30], a local search algorithm is proposed to reduce thecomputation of checking feasibility constraint of TSPTW. In[31], the minimum number of vehicles to meet the time windowrequirements is studied by utilizing precedence graphs. Aninsertion heuristic to TSPTW is proposed in [36]. The schemebuilds a route by inserting a node each time. While checkingthe time feasibility, backtracking is sometimes needed and the
3m-TSP with Deadlines is m-TSPTW having all release time at 0.

solution is further improved in the post-optimization phase.However, since checking the tour feasibility is as hard asthe original problem [30], these approaches are still quitecomputationally expensive.
On the other hand, several approximation algorithms havebeen proposed for the VRPTW problem in [32], [35]. However,these algorithms are not suitable for the recharging problemcontext. First, they assume the number of vehicles is unlimitedbut the number of SenCars is bounded in our problem4.Second, existing algorithms deal with a static problem input.However, in EROMS, new emergencies may appear at anytime, and residual node lifetimes also vary due to ongoingsensing activities. Maintaining an optimal schedule would be-come prohibitively expensive. Finally, existing algorithms maygenerate unbalanced workloads among SenCars, resulting inidling SenCars while emergencies still exist.
Thus we present a heuristic algorithm that schedules rechargeassignments among SenCars. Two important metrics affect therecharging order between node i and node j: the traveling timebetween node i to node j, and their residual lifetime Li andLj . If node j has a small Lj such that it would be dead if aSenCar recharges node i first, node j should be visited first.
We use a weighted sum wij of traveling time from the currentnode i to next node j and the residual lifetime of node j,
wij = αtij + (1− α)Lj . (9)
wij is used to decide which node j to recharge next. A sensornode with a smaller weighted value should be visited at a higherpriority. When α = 1, the algorithm reduces to nearest nodeselection that the SenCars always recharge the closest node firstregardless of battery deadlines; when α = 0, it picks the nodewith the earliest battery deadline first regardless of the travelingdistance.
The value of α greatly affects the schedule. Fig. 4 gives anexample of a SenCar and 3 sensor nodes. The residual lifetimeand the traveling time on each edge are shown in the figure, andα varies from 0, 0.5 to 1. We assume that recharging a sensorbattery takes 1 hour to finish. At time 0 s, the SenCar calculatesthe weight to sensor nodes 1, 2 and 3. The minimum weightsare circled. When α = 1, node 3 has the minimum weight;when α = 0.5, 1, node 1 has the minimum weight. However,if node 3 is chosen to be the next node, node 1 would havebeen dead after finishing recharging node 3. Thus α = 1 isinfeasible in this example. α = 0.5 and α = 0 generate thesame schedule 1 → 3 → 2.
From this example, we can see that the value α affectsthe feasibility of the solution. We might expect that the totaldistance be inversely proportional to α and a binary searchmay locate the maximum feasible α. However, some tests haveshown that it is not always true. We decide to search througha list of A distinct α values, e.g., α = 0.0, 0.1, . . . , 1.0 whereA = 11. We find that this choice achieves a desirable tradeoffbetween optimality and complexity.
When a SenCar performs calculation, it communicates viaa long range radio with other SenCars to know their positions
4Adopting limited number of vehicles usually requires a relaxed timeconstraint which allows late arrivals [33], [34]. However, the time constraintshould not be relaxed in the EROMS problem.
650 s
900 s
750 s
300 s
400 s
200 s sL 50003=
sL 18001=
sL 95002=
Weight
01w
Current time: 0s
1=a 0=a5.0=a
02w
03w
300
400
200
1800
9500
5000
1050
2600
4950
Weight
12w
0=a5.0=a
13w
5600
1100
3250
925
Current time: 3900s
Fig. 4. Example of Minimum Weighted Sum Algorithm.
TABLE IIMINIMUM WEIGHTED SUM ALGORITHM
Input: weight parameter α ∈ [0, 1] in stepsize 1/(A− 1),position of SenCar at node k, emergency set M, travelingtime from i to j, tij , residual lifetime Li, ∀i, j ∈M,node list Ωi at service station, i ∈ NOutput: result weight parameter α and schedule sequence QInitialize minDist =∞For α = 0, . . . , 1While M = ∅compute weight wkj ← αtkj + (1− α)Lj
communicate service station IfΩi = 1, Set wki =∞End iffind j ← argmin
jwkj
Qt ← Qt + j, M ←M − jupdate ∀i ∈M , Li ← Li − tkj − tjIf Li ≤ 0declare infeasible and break (Inform service station).End ifmove to position j, k ← j, recharge and update Lj
End whileIf feasiblecompute total cost dist(Qt)If dist(Qt) < minDist,minDist ← dist(Qt), Q← Qt
End ifEnd if
End for
for computing the weighted sum. Since the SenCar is equippedwith high-capacity batteries and powerful antennas, using longrange communication among the SenCars and service station isa reasonable option here. Current technology such as cellularcommunications and WiMax can support data transmission upto several miles, which would suffice the scale for a sensornetwork. To avoid conflicts where multiple SenCars choosethe same node for recharge, we utilize the service station tostore and update the availability of each node. The procedureis similar to that for shared memory access in operating systems[37]. The service station maintains a 0-1 valued node listΩ. Once a sensor is chosen, its value is set to 1 (locked).Otherwise, it is 0. The value should be changed back from1 to 0 when a SenCar finishes recharging that node. A SenCarcan simply communicate with the service station, exclude nodesalready selected by other SenCars, and notify the service stationof the status of nodes it chooses. Table II shows the pseudo-code of the entire algorithm.
We now analyze the complexity of the heuristic algorithm.Note that the node selection operations are executed on eachSenCar, which takes O(M) time. For each SenCar, it performs

TABLE IIIPARAMETER SETTINGS
Parameter ValueField Length 200× 200, 282× 282m2
Number of Nodes N 250, 350, 500, 1000Number of SenCars S 1, 2, 3, 4, 5Number of Levels 3Areas on l-th level 4l
Battery Capacity 780 mAhTransmission Range 18 mUnit Energy Consumption rc 37.5 mJEnergy Consumption Probability p 0.5SenCar Speed 1 m/sMaximum Recharge Time 73.4 minsNormal Recharge Threshold 50%Emergency Recharge Threshold 10%Simulation Time 6 months
M/S rounds of node selections and the total number of testson α is A. Thus, the total computational complexity of ourheuristic algorithm is O(AM2
S ).
VII. PERFORMANCE EVALUATION
In this section, we use simulation to evaluate the effective-ness and efficiency of our framework. We have developed adiscrete event-driven simulator using POSIX thread program-ming in C language. Message communications between sensornodes are emulated using inter-process communication in oursimulator. Our simulator is fully capable of realizing messagecommunication based on NDN (message routing), informationconvergence, recharge and SenCar mobility. To evaluate theperformance of NETWRAP, we examine two network sizesof 500 and 1000 sensor nodes, uniformly randomly distributedover a 200×200m2 and 282×282m2 square field, respectively.The field size is chosen so that the two cases have the samenode density. The network consists of 3-level hierarchy with 4l
number of subareas at the l-th level. The energy consumptionon each sensor is a Bernoulli random variable with probabilityp to consume unit energy (37.5 mJ). If a sensor node workscontinuously at this rate, the battery can last for 5 days.
To evaluate energy overhead of the protocol, we use themodel presented in [38], i.e., et = (e1d
αr +e0)l, where et is the
energy consumption while transmitting a message of l bits, dris the transmission range, e1 is the loss coefficient per bit, α isthe path loss exponent and e0 is the excessive energy consumedon sensing, coding, modulations, etc.5 The relationship betweenrecharged energy and recharge time follows that of PanasonicNi-MH AAA battery [22]. To understand the impact of thenumber of SenCars on network performance, we show marginalcases where the number of SenCars is not sufficient whileadding one more SenCar would guarantee perpetual operations.These cases are S = 2, 3 for N = 500 and S = 4, 5 forN = 1000. We will present these cases in the following andvalidate the correctness of Proposition 1. All the parametersettings in the simulation are listed in Table III.
A. Evaluation of Weighted-sum Algorithm
In this subsection, we evaluate the effectiveness of theweighted-sum algorithm in finding the shortest path and achiev-ing no node failure. We examine cases when 4 SenCars are em-ployed. We assume the locations of emergencies are randomly
5dr = 15m, e0 = 45× 10−9 J/bit, e1 = 10× 10−9 J/bit, α = 2.
TABLE IVTOTAL TRAVELING DISTANCE OF SENCARS, D
M D (α = 0) D (α = 0.2) D (α = 0.4)72 7524.1 7473.3 7740.280 7652.4 7578.9 7706.688 8662.6 8128.3 7251.696 Infeasible Infeasible InfeasibleM D (α = 0.6) D (α = 0.8) D (α = 1)72 6843.5 6390.6 Infeasible80 7271.8 6941.0 Infeasible88 6998.3 Infeasible Infeasible96 Infeasible Infeasible Infeasible
distributed in the field of 282×282m2, and the residual energyuniformly distributed from zero to the emergency threshold.The corresponding residual lifetime is calculated by dividingthe residual energy by prc, the expected energy consumptionin unit time.
Table IV shows the total distance of SenCars when thenumber of concurrent emergencies M increases from 72 to 96in a step of 8. Note that when the number reaches 96, the set of4 SenCar is not sufficient to resolve all the emergencies withoutcomplete battery depletion. For M = 88, weight parameterα = 0.8, 1 are not feasible and for M = 72, 88, α = 1 is notfeasible either. We notice that in the case when α = 1, somenodes that suffer from energy shortage may not get rechargedin a higher priority thereby rendering the result infeasible toavoid battery depletion. As we can see from this example, thechoice of α is critical, when α approaches 1, the total distanceis decreased at the risk of becoming infeasible. Thus we needto search for α in our algorithm. In real applications, the valueof α is subject to change and determined by real-time statisticaldata and parameters.
0 1000 2000 3000 40000
10
20
30
40
50
60Evolution of Nonfunctional Node
Time (Hour)Per
cent
age
of N
onfu
nctio
nals
(%
)
N=250,Static
N=350,Static
N=350,NETWRAP
N=250,NETWRAP
0.5 1 1.5 2 2.50
50
100
150
200
Network Size
Ave
rage
Res
pons
e T
ime
(h)
Response time to Emergencies
NETWRAPStatic approach
(a) (b)Fig. 5. Comparison of static and real-time approaches in terms of (a)Percentage of nonfunctional nodes; (b) Average response time to emergencies.
B. Performance Comparison with a Static Optimization Ap-proach
In this subsection, we compare network performance of ourreal-time framework with the static optimization approach usedin [12]. Since the static approach has only designed algorithmsfor a single SenCar, we set the number of SenCar at 1 andcompare the percentage of nonfunctional nodes and responsetime to emergencies when N = 250, 300. The percentage ofnonfunctional nodes indicates how many nodes have depletedenergy and are waiting for the SenCar. The response time toemergencies is measured from the time a node reports emergen-cy until it is resolved by the SenCar. A shorter response timeindicates that the SenCar can respond faster to emergencies.
In the static approach, the SenCar selects nodes with en-ergy less than the normal recharge threshold, calculates the

0 1000 2000 3000 40000
10
20
30
40
50
Time (Hour)
Am
ount
of E
nerg
y (K
J)Energy Neutral (N=500,S=2)
Amount of recharged energyAmount of consumed energyRecharge Upper Bound
upper boundconsumption replenishment
0 1000 2000 3000 40000
10
20
30
40
50
60
70
80
Time (Hour)
Am
ount
of E
nerg
y (K
J)
Energy Neutral (N=500,S=3)
Amount of recharged energyAmount of consumed energyRecharge Upper Bound
consumption
replenishmentupper bound
(a) (b)
0 1000 2000 3000 40000
20
40
60
80
100
Time (Hour)
Am
ount
of E
nerg
y (K
J)
Energy Neutral (N=1000,S=4)
Amount of recharged energyAmount of consumed energyRecharge Upper Bound
consumptionupper bound
replenishment
0 1000 2000 3000 40000
20
40
60
80
100
120
Time (Hour)
Am
ount
of E
nerg
y (K
J)
Energy Neutral (N=1000,S=5)
Amount of recharged energyAmount of consumed energyRecharge Upper Bound
consumptionupper bound
replenishment
(c) (d)Fig. 6. Evolution of energy consumption vs. energy replenishment in 6 monthstime. (a) N = 500, S = 2. (b) N = 500, S = 3. (c) N = 1000, S = 4. (d)N = 1000, S = 5.
minimum traveling distance throughout these nodes and per-forms recharge one by one. Fig. 5(a) shows the percentage ofnonfunctional nodes. We can see the number of nonfunctionalnodes is much higher in the static optimization approach, e.g.when N = 250, there are around 15% nonfunctional nodesin NETWRAP but nearly 30% in the static approach. This isbecause that some nodes in the pre-computed sequence mayconsume energy at faster rates, making the initial sequencecomputed in the static method no longer valid. Thus it cannotcover all the sensor nodes before energy depletion. Second, anode in emergency is not treated with priority in the staticmethod. Thus a node in emergency may deplete its energybefore the SenCar arrives, resulting in high percentage ofnonfunctional nodes. The results in Fig. 5(a) clearly indicatethat our real-time framework is more effective in rechargingsensor nodes and resolving emergencies.
Fig. 5(b) shows the average response time to emergencies.We can see while NETWRAP takes around 10 and 12.5 hours(for N = 250 and 350 respectively), the static approach takesdrastically longer times (around 61 and 160 hours, almost oneorder of magnitude longer). This is because in [12] emergencyand normal nodes are not differentiated. A pre-computed routecontaining both types of nodes would result in extremely longwaiting times for emergency nodes. The approach degradesfast and becomes infeasible as the network size increases. Incontrast, NETWRAP prioritizes nodes in emergency; it resolvesnonfunctional situations much faster than the static approach.
C. Network Performance
In this subsection, we evaluate the energy evolution of thenetwork, the number of emergency and nonfunctional (i.e.,energy depleted) nodes of the network, and the maintenancecost of the framework.
1) Energy Evolution: First, we show the energy evolutionin the networks with 500 nodes and 1000 nodes served bydifferent numbers of SenCars, compared to the upper bounds oftotal recharge capabilities. In Fig. 3, the maximum rechargingrate is achieved in the 17-th minute to 45-th minute duration. It
0 12 24 36 48 60 72 84 960
2
4
6
8
Percentage of Energy (%)
Per
cent
age
(%)
Energy Distribution of N=500, S=2
Emergency Threshold
0 12 24 36 48 60 72 84 960
5
10
15
Percentage of Energy (%)
Per
cent
age
(%)
Energy Distribution of N=500, S=3
Emergency Threshold
(a) (b)
0 12 24 36 48 60 72 84 960
2
4
6
8
10
Percentage of Energy (%)
Per
cent
age
(%)
Energy Distribution of N=1000, S=4
Emergency Threshold
0 12 24 36 48 60 72 84 960
5
10
15
Percentage of Energy (%)
Per
cent
age
(%)
Energy Distribution of N=1000, S=5
Emergency Threshold
(c) (d)Fig. 7. Energy distribution at equilibrium. (a)N = 500, S = 2. (b) N = 500,S = 3. (c) N = 1000, S = 4. (d) N = 1000, S = 5.
replenishes 75% of the battery energy, equivalent to 433 J/min.The upper bound is calculated by assuming that all the SenCarsare performing recharge at maximum recharging rates all thetime. In Fig. 6, the amount of energy consumed, replenishedand recharge upper bound in every one-hour time slot is plottedas functions of the simulation time.
In Fig. 6(a) and (c), we can see that the consumed energy“steps down” to a lower level around 400 hours and then entersequilibrium. This is because a portion of sensor nodes depletetheir energy and do not get recharged. In these two scenariosthe energy neutral condition has been violated, simply becausethe number of SenCars is not enough. Fig. 6(b) and (d) showthe energy evolution when the number of SenCars is increasedby 1, both of which satisfy the energy neutral condition at theequilibrium and there is no such “step-down” effect in energyconsumption. The gap between the recharge upper bound andenergy replenished is due to that there are traveling time andidling time between two consecutive recharges in simulations.In addition, the SenCars may perform normal recharge inwhich the recharging rates are much lower than the maximumrecharging rates used for calculating the upper bound.
The energy distribution among nodes also carries valuableinformation about the health of the network. Higher averageenergy distribution is more robust to unexpected surges inenergy consumption. Fig. 7 shows the energy distribution ofN = 500, S = 2, 3 and N = 800, S = 4, 5. To see the benefitsof more SenCars, compare Fig. 7(a) to Fig. 7(b). The latter hasenergy distribution that concentrates around a higher averagevalue. In Fig. 7(d) for a network size of 1000 sensors, thenumber of nodes with energy below the emergency thresholdis significantly lower than that in Fig. 7(c).
2) Number of Emergencies: Fig. 8 compares the percentageof nodes in emergency and nonfunctional (i.e., energy at zero)status for networks of 500 and 1000 nodes with differentnumbers of SenCars. First, we can see that there are surgesin the numbers of emergency and nonfunctional nodes duringthe first 200 hours. This is due to the fact that the SenCars onlyresponds to requests when the node energy is below the normal
0 1000 2000 3000 4000
0
20
40
60
Time (Hour)
Per
cent
age
of E
mer
genc
ies
(%) Evolution of Emergency
N=500,S=2N=500,S=3N=1000,S=4N=1000,S=5
N=1000,S=5
N=500,S=2
N=500,S=3N=1000,S=4
0 1000 2000 3000 4000
0
10
20
30
40
50
60
Time (Hour)
Per
cent
age
of N
onfu
nctio
nals
(%
) Evolution of Nonfunctional Node
N=500,S=2N=500,S=3N=1000,S=4N=1000,S=5
N=1000,S=5
N=1000,S=4 N=500,S=3
N=500,S=2
(a) (b)Fig. 8. Number of emergent and nonfunctional nodes (a) number of emergentnodes (b) number of nonfunctional nodes.
Field X Axis (m)
Fie
ld Y
Axi
s (m
)
Heatmap (converge to service station)
20 60 100 140 180
20
60
100
140
180
0
10
20
30
40
KJ
Field X Axis (m)
Fie
ld Y
Axi
s (m
)Heatmap (converge to SenCars)
20 60 100 140 180
20
60
100
140
18010
20
30
40
KJ
(a) (b)Fig. 9. Comparison of energy information convergence schemes (a) convergeto service station (b) converge to SenCars.
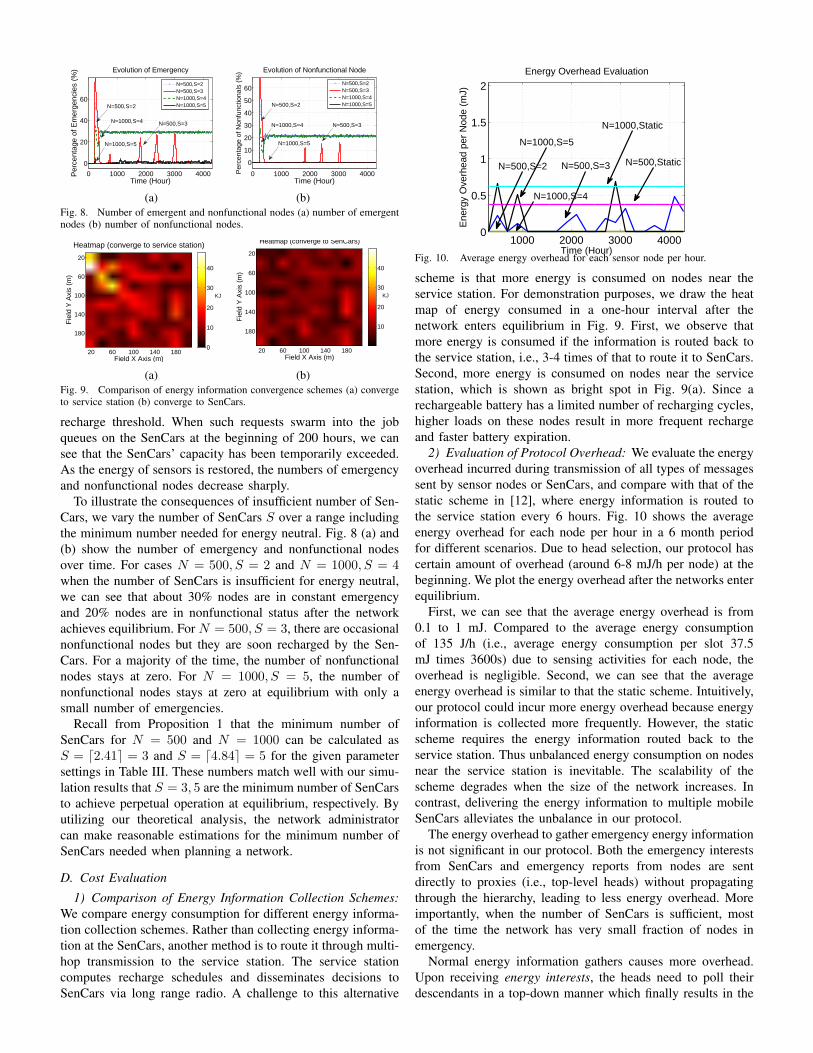
recharge threshold. When such requests swarm into the jobqueues on the SenCars at the beginning of 200 hours, we cansee that the SenCars’ capacity has been temporarily exceeded.As the energy of sensors is restored, the numbers of emergencyand nonfunctional nodes decrease sharply.
To illustrate the consequences of insufficient number of Sen-Cars, we vary the number of SenCars S over a range includingthe minimum number needed for energy neutral. Fig. 8 (a) and(b) show the number of emergency and nonfunctional nodesover time. For cases N = 500, S = 2 and N = 1000, S = 4when the number of SenCars is insufficient for energy neutral,we can see that about 30% nodes are in constant emergencyand 20% nodes are in nonfunctional status after the networkachieves equilibrium. For N = 500, S = 3, there are occasionalnonfunctional nodes but they are soon recharged by the Sen-Cars. For a majority of the time, the number of nonfunctionalnodes stays at zero. For N = 1000, S = 5, the number ofnonfunctional nodes stays at zero at equilibrium with only asmall number of emergencies.
Recall from Proposition 1 that the minimum number ofSenCars for N = 500 and N = 1000 can be calculated asS = ⌈2.41⌉ = 3 and S = ⌈4.84⌉ = 5 for the given parametersettings in Table III. These numbers match well with our simu-lation results that S = 3, 5 are the minimum number of SenCarsto achieve perpetual operation at equilibrium, respectively. Byutilizing our theoretical analysis, the network administratorcan make reasonable estimations for the minimum number ofSenCars needed when planning a network.
D. Cost Evaluation
1) Comparison of Energy Information Collection Schemes:We compare energy consumption for different energy informa-tion collection schemes. Rather than collecting energy informa-tion at the SenCars, another method is to route it through multi-hop transmission to the service station. The service stationcomputes recharge schedules and disseminates decisions toSenCars via long range radio. A challenge to this alternative
1000 2000 3000 40000
0.5
1
1.5
2Energy Overhead Evaluation
Time (Hour)
Ene
rgy
Ove
rhea
d pe
r N
ode
(mJ)
N=500,S=2
N=1000,S=4
N=1000,S=5
N=500,S=3 N=500,Static
N=1000,Static
Fig. 10. Average energy overhead for each sensor node per hour.
scheme is that more energy is consumed on nodes near theservice station. For demonstration purposes, we draw the heatmap of energy consumed in a one-hour interval after thenetwork enters equilibrium in Fig. 9. First, we observe thatmore energy is consumed if the information is routed back tothe service station, i.e., 3-4 times of that to route it to SenCars.Second, more energy is consumed on nodes near the servicestation, which is shown as bright spot in Fig. 9(a). Since arechargeable battery has a limited number of recharging cycles,higher loads on these nodes result in more frequent rechargeand faster battery expiration.
2) Evaluation of Protocol Overhead: We evaluate the energyoverhead incurred during transmission of all types of messagessent by sensor nodes or SenCars, and compare with that of thestatic scheme in [12], where energy information is routed tothe service station every 6 hours. Fig. 10 shows the averageenergy overhead for each node per hour in a 6 month periodfor different scenarios. Due to head selection, our protocol hascertain amount of overhead (around 6-8 mJ/h per node) at thebeginning. We plot the energy overhead after the networks enterequilibrium.
First, we can see that the average energy overhead is from0.1 to 1 mJ. Compared to the average energy consumptionof 135 J/h (i.e., average energy consumption per slot 37.5mJ times 3600s) due to sensing activities for each node, theoverhead is negligible. Second, we can see that the averageenergy overhead is similar to that the static scheme. Intuitively,our protocol could incur more energy overhead because energyinformation is collected more frequently. However, the staticscheme requires the energy information routed back to theservice station. Thus unbalanced energy consumption on nodesnear the service station is inevitable. The scalability of thescheme degrades when the size of the network increases. Incontrast, delivering the energy information to multiple mobileSenCars alleviates the unbalance in our protocol.
The energy overhead to gather emergency energy informationis not significant in our protocol. Both the emergency interestsfrom SenCars and emergency reports from nodes are sentdirectly to proxies (i.e., top-level heads) without propagatingthrough the hierarchy, leading to less energy overhead. Moreimportantly, when the number of SenCars is sufficient, mostof the time the network has very small fraction of nodes inemergency.
Normal energy information gathers causes more overhead.Upon receiving energy interests, the heads need to poll theirdescendants in a top-down manner which finally results in the

TABLE VBALANCE OF LOAD ON SENCARS
SenCar 1 2 3 4 5N = 500, S = 2 51% 49% - - -N = 500, S = 3 35% 34% 31% - -N = 1000, S = 4 25% 25% 25% 25% -N = 1000, S = 5 22% 20% 20% 19% 19%
0 1000 2000 3000 40000
50
100
150
200
Time (hour)
Mile
age
(KM
)
Mileage of SenCar
N=500,S=2N=500,S=3N=1000,S=4N=1000,S=5
Fig. 11. Mileages SenCars have traveled in 6 months.
broadcast of energy interest message in subareas at the bottom-level. Such broadcast, as well as the reply from each node,leads to the increase of the number of messages transmittedand the overhead. When the number of SenCars is sufficient asN = 500, S = 3 and N = 1000, S = 5, more energy overheadis observed.
3) Evaluation of Load Balance and Mileage on SenCar-s: We monitor the energy replenished by each SenCar andcompare their workloads. The workload is measured by theamount of energy replenished to sensor nodes during the entiresimulation period. Table V shows that the workloads are wellbalanced in all four scenarios due to the effective coordinationin our framework. The SenCars share the work evenly and noSenCar is overloaded. On the other hand, we use the mileagesSenCars travel to evaluate the cost (e.g., the energy consumed)for SenCars to move around. Fig. 11 shows the accumulatedmileages in 6 months. For both network sizes, the networkswith fewer SenCars (500 nodes and 2 SenCars, 1000 nodesand 4 SenCars) have lower mileage compared with the samenetwork with more SenCars (500 nodes and 3 SenCars, 1000nodes and 5 SenCars), respectively. This is due to the presenceof nonfunctional nodes. According to the calculation of weightfor emergency selection (Eq. (9)), decision is made based on theresidual lifetime of the nodes and the traveling time from theSenCars to the nodes. For the networks with fewer SenCars,there are always approximate 20% nonfunctional nodes afterthe networks enter equilibrium. The weights are dominatedby the traveling time which is proportional to the distancesfrom the SenCars to these nodes. Thus the SenCars alwayschoose the nearest nodes for recharge. For the network withmore SenCars, however, the traveling time is not the dominatingfactor, thus the SenCars may choose a farther node with shorterresidual lifetime for recharge to avoid battery depletion. Thiscauses the increase of SenCar mileage.
VIII. CONCLUSION AND FUTURE WORKS
In this paper, we study how to coordinate multiple mobilevehicles to recharge sensors and propose a novel NDN-basedreal-time wireless energy replenishment framework. In the
framework, a comprehensive set of communication protocolsare developed using NDN concepts and mechanisms to pro-vide real-time energy information gathering and delivery. Theprotocols can adapt to unpredictable network conditions andsatisfy the needs for both normal and emergency recharging.Then we formally analyze the probability for the energy neutralcondition to hold, which is required for perpetual networkoperation. In the analysis, we derive the minimum number ofSenCars needed to achieve perpetual operations. To addressconcurrent emergency situations, we model the EmergencyRecharge Optimization problem with multiple SenCars into them-TSP with Deadline problem and provide a fast, efficientheuristic algorithm suitable for dynamic network conditions.The extensive simulation results demonstrate the efficiency andeffectiveness of the proposed algorithm and the frameworkin improving network performance compared to the staticoptimization approach and other methods of energy informa-tion collection. We also validate the correctness of theoreticalanalysis on the minimum number of SenCars needed.
There are some interesting issues that deserve further study infuture. One important practical aspect is the recharge capacityof the SenCar, and its own energy consumption in moving.Such factors should be included in the optimization formulationto understand their impacts on recharge decisions. In addition,since the resources are limited on the SenCars, important nodes(e.g., cluster heads, proxies) may need some priority in recharg-ing. Another important issue is the distributed decision andcoordination among SenCars. Currently, the decisions are aidedby the service station with long range radio transmissions. Adistributed design would allow SenCars to coordinate with eachother to make decisions, which is more robust and potentiallymore efficient.
ACKNOWLEDGMENTS
This work was supported in part by the US NSF grantnumbers ECCS-0801438 and ECCS-1307576 and US AROgrant number W911NF-09-1-0154.
REFERENCES
[1] A. Kurs, A. Karalis, R. Moffatt, J. D. Joannopoulos, P. Fisher andM. Soljacic, “Wireless power transfer via strongly coupled magneticresonances,” Science, vol. 317, pp. 83, 2007.
[2] A. Karalis, J. D. Joannopoulos and M. Soljacic, “Efficient wireless non-radiative mid-range energy transfer,” Annals of Physics, vol. 323, no. 1,pp. 34-48, Jan. 2008.
[3] M. Rahimi, H. Shah, G. Sukhatme, J. Heideman and D. Estrin, “Studyingthe feasibility of energy harvesting in a mobile sensor network,” IEEEInternational Conference on Robotics and Automation, 2003.
[4] A. Kansal, J. Hsu, M. Srivastava and V. Raqhunathan, “Harvesting awarepower management for sensor networks,” 43rd ACM/IEEE Design Automa-tion Conference, 2006.
[5] PowerCast Corp, “http://www.powercastco.com.”[6] B. Tong, Z. Li, G. Wang and W. Zhang, “How wireless power charging
technology affects sensor network deployment and routing,” IEEE ICDCS,2010.
[7] S. He, J. Chen, F. Jiang, D. Yau , G. Xing and Y. Sun, “Energy provisioningin wireless rechargeable sensor networks,” IEEE INFOCOM, 2011.
[8] Y. Peng, Z. Li, W. Zhang and D. Qiao, “Prolonging sensor network lifetimethrough wireless charging,” IEEE RTSS, 2010.
[9] Z. Li, Y. Peng, W. Zhang, and D. Qiao, “J-RoC: a Joint Routing andCharging Scheme to Prolong Sensor Network Lifetime”, IEEE ICNP,2011.
[10] C. Angelopoulos, S. Nikoletseas, T. Raptis, C. Raptopoulos, F. Vasi-lakis,“Efficient energy management in wireless rechargeable sensor net-works,” IEEE MSWiM, 2012.

[11] Y. Shi, L. Xie, T. Hou and H. Sherali, “On renewable sensor networkswith wireless energy transfer,” IEEE INFOCOM, 2011.
[12] M. Zhao, J. Li and Y. Yang, “Joint mobile energy replenishment and datagathering in wireless rechargeable sensor networks,” IEEE ITC, 2011.
[13] S. Zhang, J. Wu, and S. Lu, “Collaborative Mobile Charging for SensorNetworks,”IEEE MASS, 2012.
[14] V. Jacobson, D. Smetters, J. Thornton, M. Plass, N. Briggs and R.Braynard, “Networking named content,” ACM CoNEXT, 2009.
[15] R. Shah, S. Roy, S. Jain and W. Brunette, “Data MULEs: Modellinga three-tier architecture for sparse sensor networks”, in Proc. of theFirst IEEE International Workshop on Sensor Network Protocols andApplications, 2003.
[16] D. Jea, A. Somasundara and M. Srivastava, “Multiple controlled mobileelements (data mules) for data collection in sensor networks”, in IEEEDCOSS, 2005.
[17] A. Somasundara, A. Ramamoorthy and M. Srivastava, “Mobile elementscheduling for efficient data collection in wireless sensor networks withdynamic deadlines,” IEEE RTSS, 2004.
[18] I. Chatzigiannakis, A. Kinalis, S. Nikoletseas and J. Rolim, “Fast andenergy efficient sensor data collection by multiple mobile sinks,” ACMMobiWac, 2007.
[19] M. Ma and Y. Yang, “SenCar: an energy-efficient data gathering mecha-nism for large-scale multihop sensor networks,” IEEE Trans. Parallel andDistributed Systems, Vol. 18, No. 10, pp. 1476-1488, 2007.
[20] M. Ma and Y. Yang, “Data gathering in wireless sensor networks withmobile collectors,”IEEE IPDPS, 2008.
[21] O. Younis and S. Fahmy, “Distributed clustering in ad-hoc sensor net-works: a hybrid, energy-efficient approach”, IEEE Trans. Mobile Comput-ing, Vol. 3, No. 4, 2004.
[22] Panasonic Ni-MH battery handbook,“http://www2.renovaar.ee/userfiles/Panasonic_Ni-MH_Handbook.pdf”.
[23] Y. Wang, M. C. Vuran and S. Goddard, “Stochastic analysis of energyconsumption wireless sensor networks,” Proc. of IEEE Secon, 2010.
[24] R. Nelson, Probability, Stochastic Processes, and Queueing Theory: TheMathematics of Computer Performance Modeling, Springer, 1995.
[25] S. Ross, A First Course in Probability, 8th Ed, Prentice Hall, 2009.[26] C. Miller, A. Tucker and R. Zemlin,“Integer programming formulations
and traveling salesman problems,” Journal of the ACM, pp. 326-329, 1960.[27] B. Gavish, “A note on the formulation of the m-salesman traveling
salesman problem,” Management Science, 1976.[28] Tolga Bektas, “The multiple traveling salesman problem: an overview of
formulations and solution procedures,”Intl Journal of Management Science,pp. 209-219, 2006.
[29] M. M. Solomon, “Algorithm for the vehicle routing and schedulingproblems with time window constraints,”Operation Research, vol. 35, No.2, pp.254 - 265, 1987.
[30] M.W.P. Savelsbergh, “Local search in routing problems with time win-dows,” Annals of Operation Research, pp. 285-305, 1985.
[31] Snezana Mitrovic-Minic, Ramesh Krishnamurti, “The multiple TSP withtime windows: vehicle bounds based on precedence graphs,” OperationsResearch Letters, pp. 111 - 120, 2006.
[32] M. Desrochers, J.K. Lenstra, M.W.P. Savelsbergh and F. Soumis, “Vehiclerouting with time windows: optimization and approximation,” ElsevierScience Publisher, 1988.
[33] H.C. Lau, M. Sim, K. M. Teo,“Vehicle routing problem with timewindows and a limited number of vehicles”,European Journal of OperationResearch, 148, pp. 559 - 569, 2003.
[34] E. Taillard, P. Badeau, M. Gendreau, F. Geurtin, J.Y. Potvin, “A tabusearch heuristic for the vehicle routing problem with soft time win-dows,”Transportation Science, vol. 31, pp. 170- 186, 1997.
[35] N. Bansal, A. Blum, S. Chawla and A. Meyerson, “Approximationalgorithms for Deadline-TSP and Vehicle Routing with Time Windows,”ACM STOC, 2004.
[36] M. Gendreau, A. Hertz, G. Laporte and M. Stan, “A generalized insertionheuristic for the traveling salesman problem with time windows,” JournalOperations Research, vol. 46 no. 3, 1998, pp. 330-335.
[37] A. Tanenbaum, Modern Operating Systems, pp. 125, 3rd Ed, PrenticeHall, 2007.
[38] W. R. Heinzelman, A. Chandrakasan and H. Balakrishnan, “Energy-efficient communication protocol for wireless microsensor networks,”IEEE HICSS, 2000.
Cong Wang received the BEng degree in InformationEngineering from the Chinese University of HongKong and M.S. degree in Electrical Engineering fromColumbia University, New York. He is currentlyworking towards the PhD degree at the Departmentof Electrical and Computer Engineering, Stony BrookUniversity, New York. His research interests includewireless sensor networks, performance evaluation ofnetwork protocols and algorithms.
Ji Li received the B.S. degree in Electrical Engi-neering from Harbin Engineering University, Harbin,China, and the M.S. degree in Electrical Engineer-ing from Zhejiang University, Hangzhou, China. Heis currently a PhD student in the Department ofElectrical and Computer Engineering, Stony BrookUniversity, Stony Brook, New York. His researchinterests include wireless sensor networks and em-bedded systems.
Fan Ye received his B.E. and M.S. degrees inAutomation and Computer Science from TsinghuaUniversity, Beijing, China, and Ph.D. in ComputerScience from UCLA. He then joined IBM T. J.Watson Research as a Research Staff Member, work-ing on stream processing systems, cloud messagingand mobile computing. He served as the Chair forIBM Watson Mobile Computing Professional InterestCommunity for two years. He is currently an associateprofessor with the Center for Energy-efficient Com-puting and Applications at the EECS school of Peking
University, Beijing, China. He holds over a dozen US/international patents andpatent applications. His research interests include mobile computing, mobilecloud, wireless networks, sensor networks and their applications.
Yuanyuan Yang received the BEng and MS degreesin computer science and engineering from TsinghuaUniversity, Beijing, China, and the MSE and PhDdegrees in computer science from Johns HopkinsUniversity, Baltimore, Maryland. She is a professor ofcomputer engineering and computer science at StonyBrook University, New York, and the director of Com-munications and Devices Division at New York StateCenter of Excellence in Wireless and InformationTechnology (CEWIT). Her research interests includewireless networks, data center networks, optical net-
works and high-speed networks. She has published more than 270 papers inmajor journals and refereed conference proceedings and holds seven US patentsin these areas. She is currently the Associate Editor-in-Chief for the IEEETransactions on Computers and an Associate Editor for the Journal of Paralleland Distributed Computing. She has served as an Associate Editor for the IEEETransactions on Computers and IEEE Transactions on Parallel and DistributedSystems. She has served as a general chair, program chair, or vice chair forseveral major conferences and a program committee member for numerousconferences. She is an IEEE Fellow.