neural fields for mobile robot control - universität ulm · julia ziegler neural fields for mobile...
TRANSCRIPT
Neural fields for mobile robot control
Seminar „Neuroinformatik“ SS 2007Prof. Dr. G. Palm, Dr. Mohamed Oubbati, Dr. F. SchwenkerUniversität Ulm
Vortrag von Julia Ziegler
Julia ZieglerNeural fields for mobile robot
control 2
Gliederung
• Theorie der neuronalen Felder• Anwendung
– Robotersteuerung– Steuerung eines Autos
• Zusammenfassung / Fazit
Julia ZieglerNeural fields for mobile robot
control 3
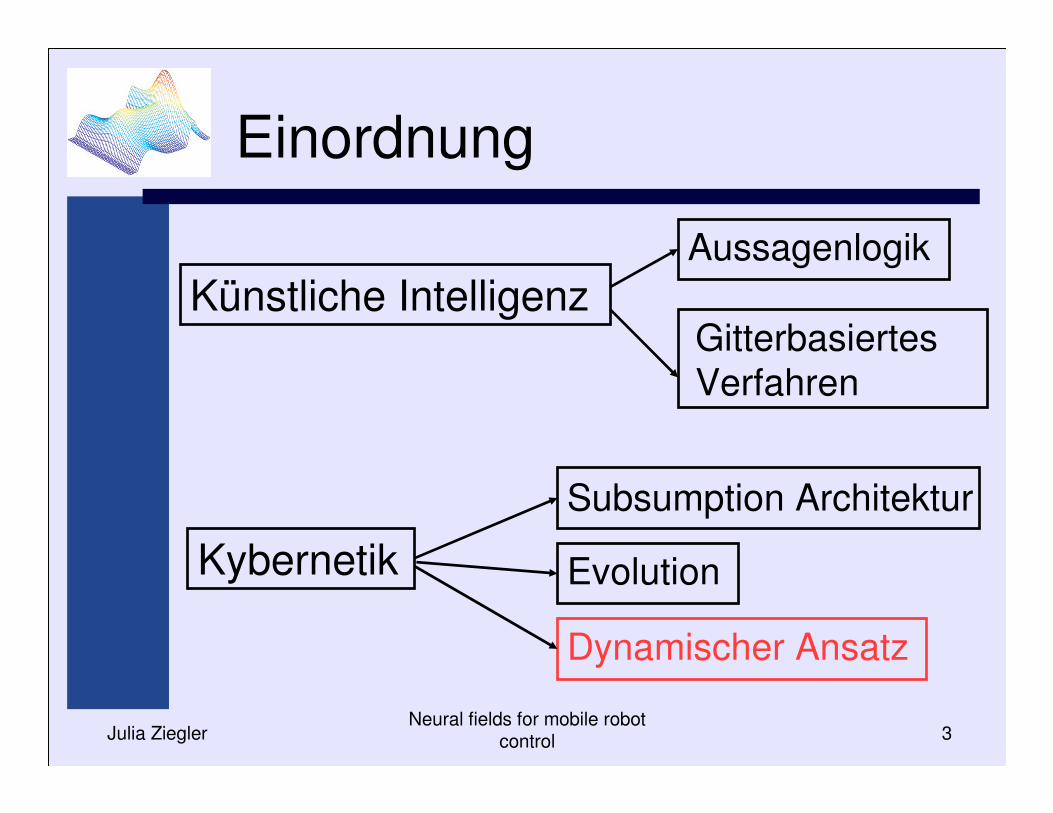
Einordnung
Kybernetik
Künstliche IntelligenzAussagenlogik
GitterbasiertesVerfahren
Subsumption Architektur
Evolution
Dynamischer Ansatz
Julia ZieglerNeural fields for mobile robot
control 4
Dynamischer Ansatz
• Basiert auf Selbstorganisation im Nervengewebe
• Verhaltensvariablen kodieren Roboterzustand
• Änderung der Variablen mittels DifferentialgleichungenÆ gewünschtes Verhalten
• Rückkopplung
Julia ZieglerNeural fields for mobile robot
control 5
Neuronale Felder
• Shun-ichi Amari 1977• Ähnlich Single-Layer Neuronalen Netzen• Kontinuierlich• Identische Neuronen, lateral verbunden• Alle Neuronen erhalten Input• Output: Aktivierung der Neuronen• HystereseÆ glatte, stabile Bewegungen
Julia ZieglerNeural fields for mobile robot
control 6
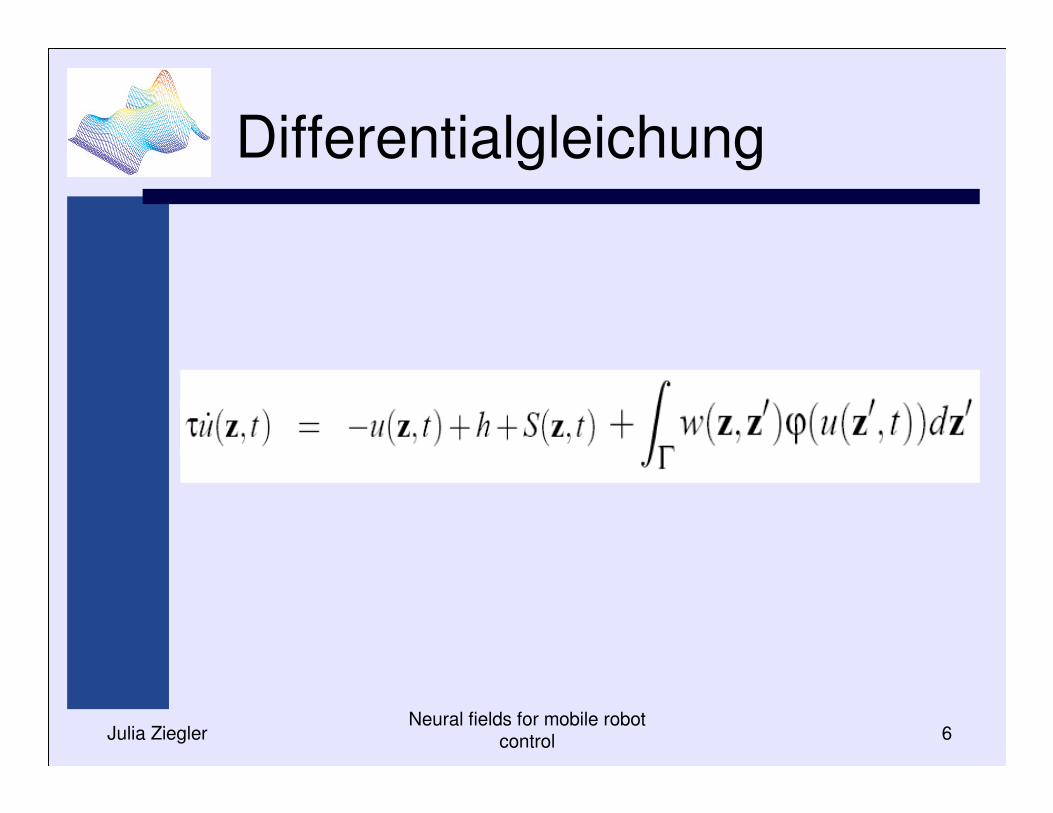
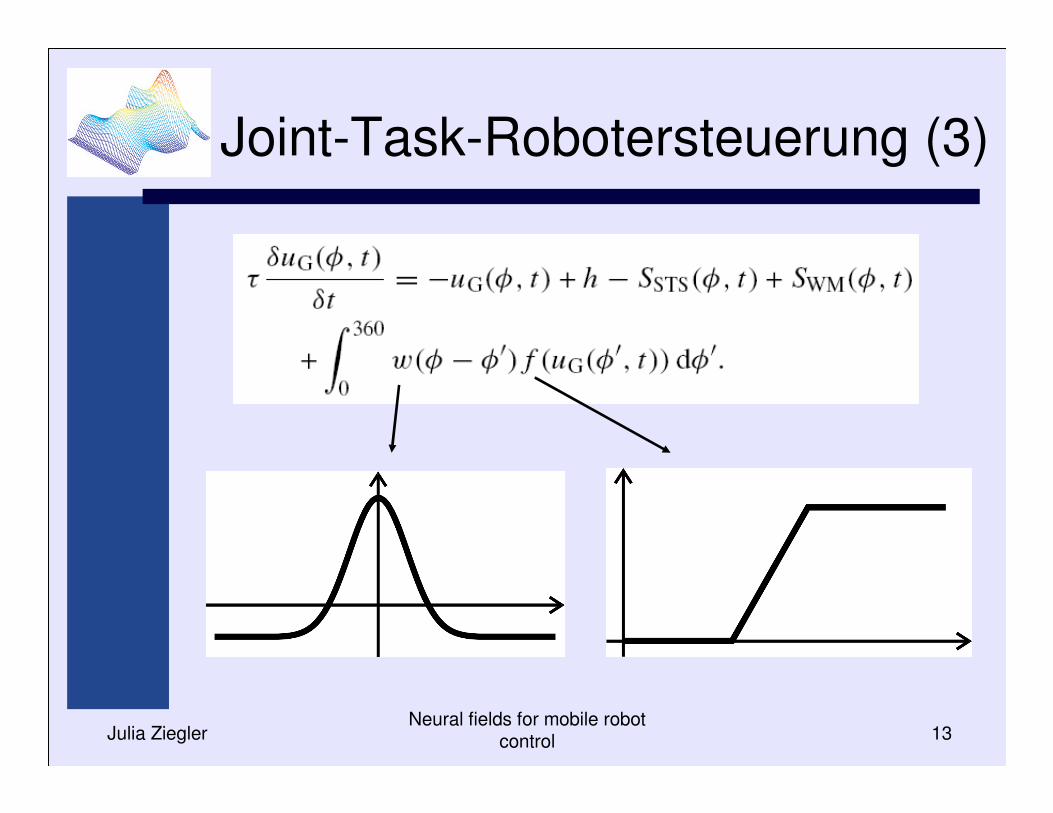
Differentialgleichung
Julia ZieglerNeural fields for mobile robot
control 7
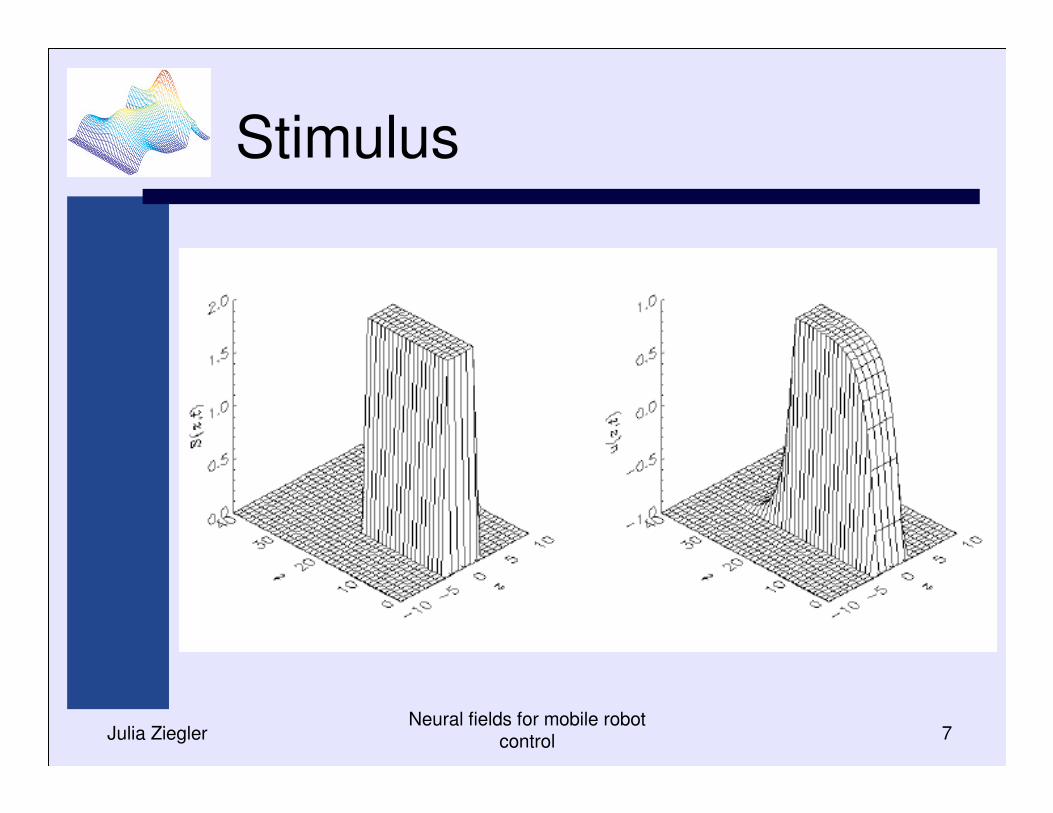
Stimulus
Julia ZieglerNeural fields for mobile robot
control 8
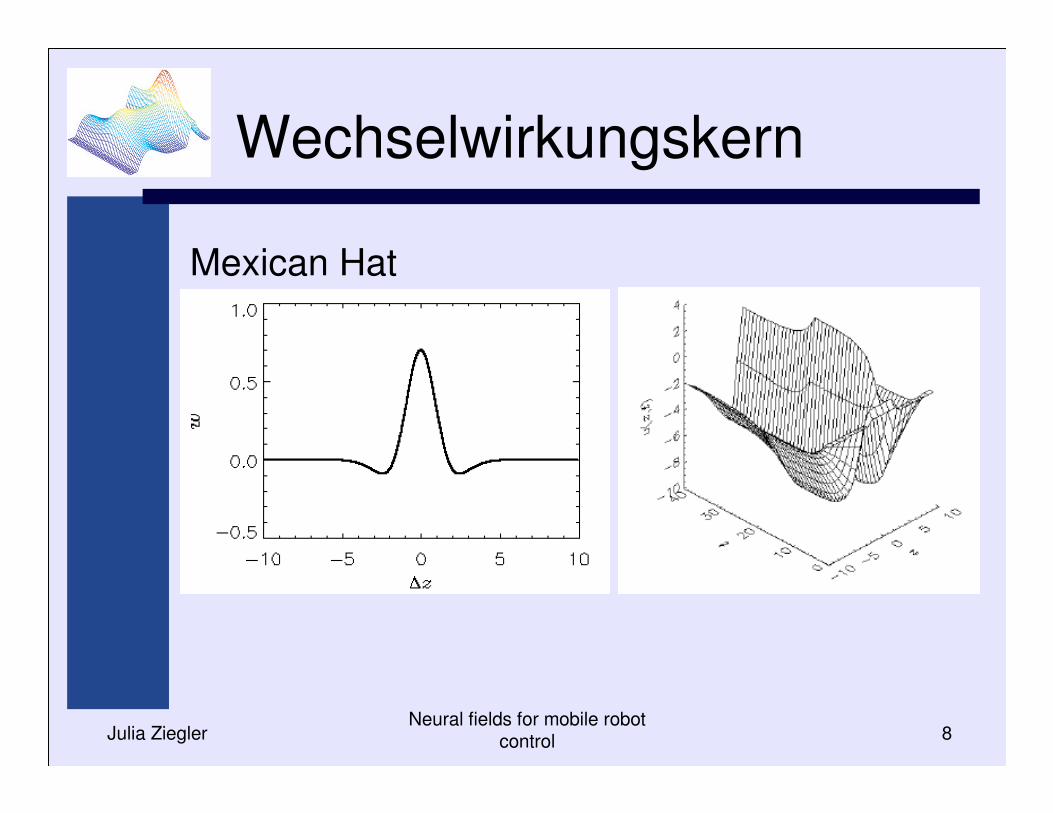
Wechselwirkungskern
Mexican Hat
Julia ZieglerNeural fields for mobile robot
control 9
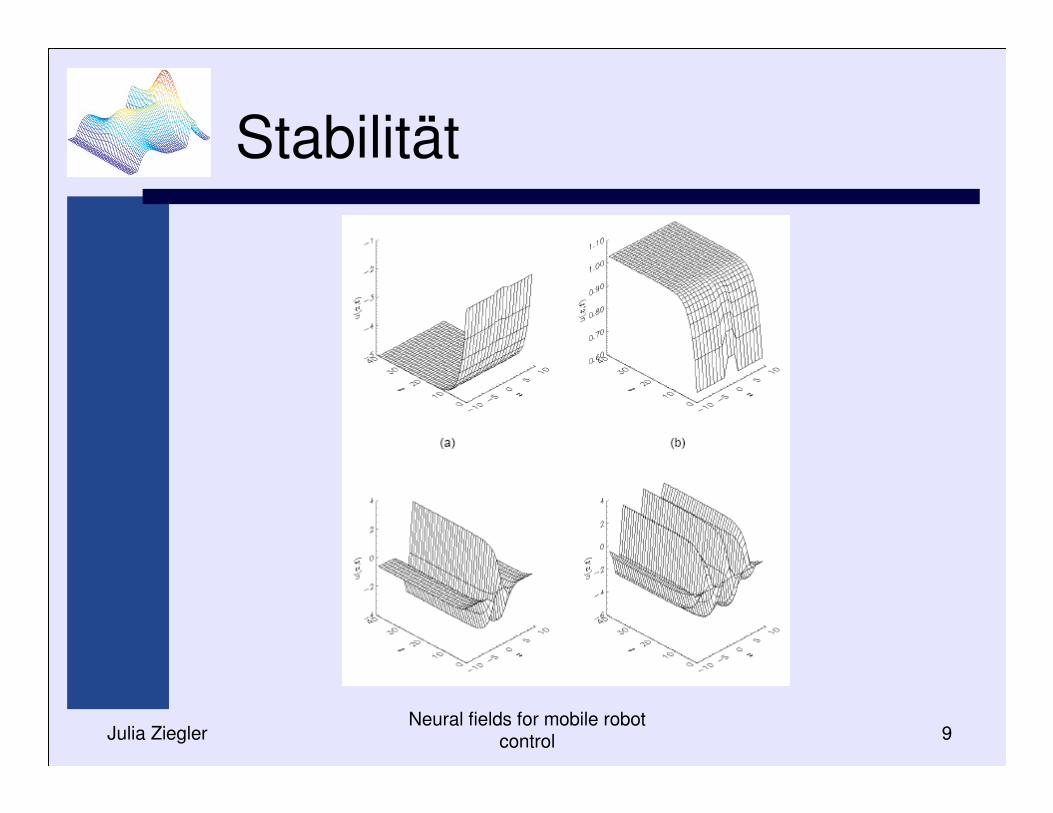
Stabilität
Julia ZieglerNeural fields for mobile robot
control 10
Euler-Diskretisierung
• Numerisches Lösungsverfahren• Ansatz:
Taylor-Entwicklung bis zum ersten Glied
Æ Siehe Tafel
Julia ZieglerNeural fields for mobile robot
control 11
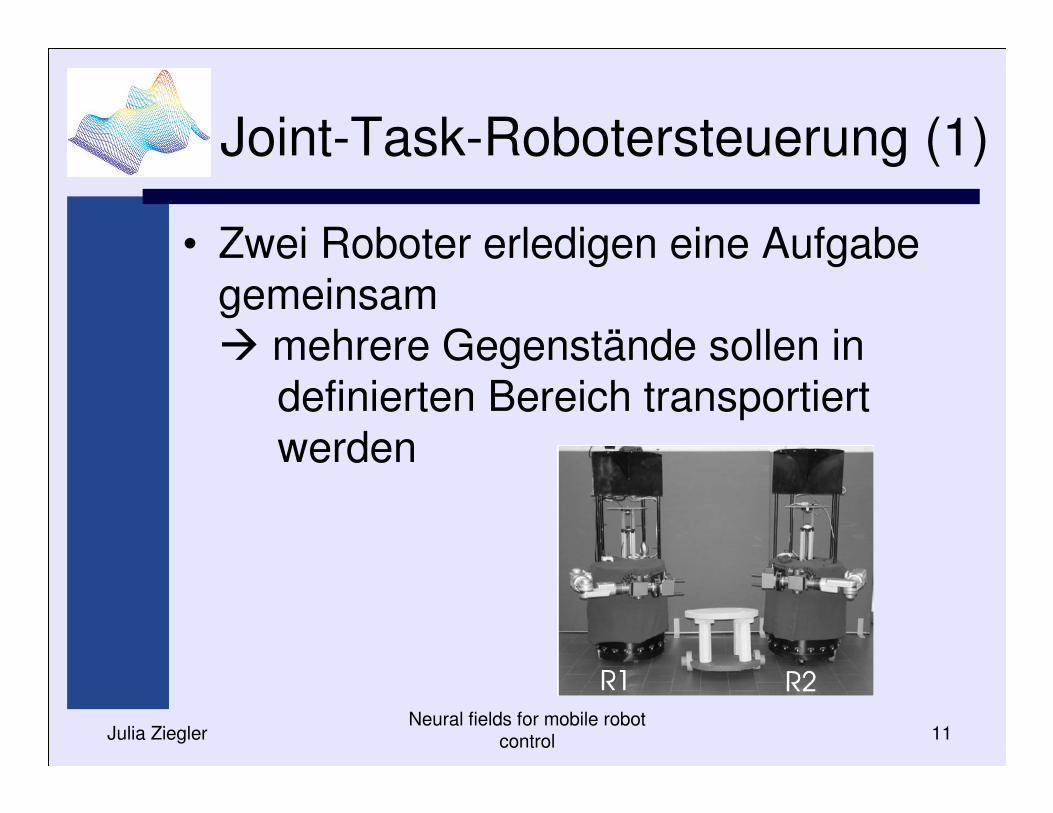
Joint-Task-Robotersteuerung (1)
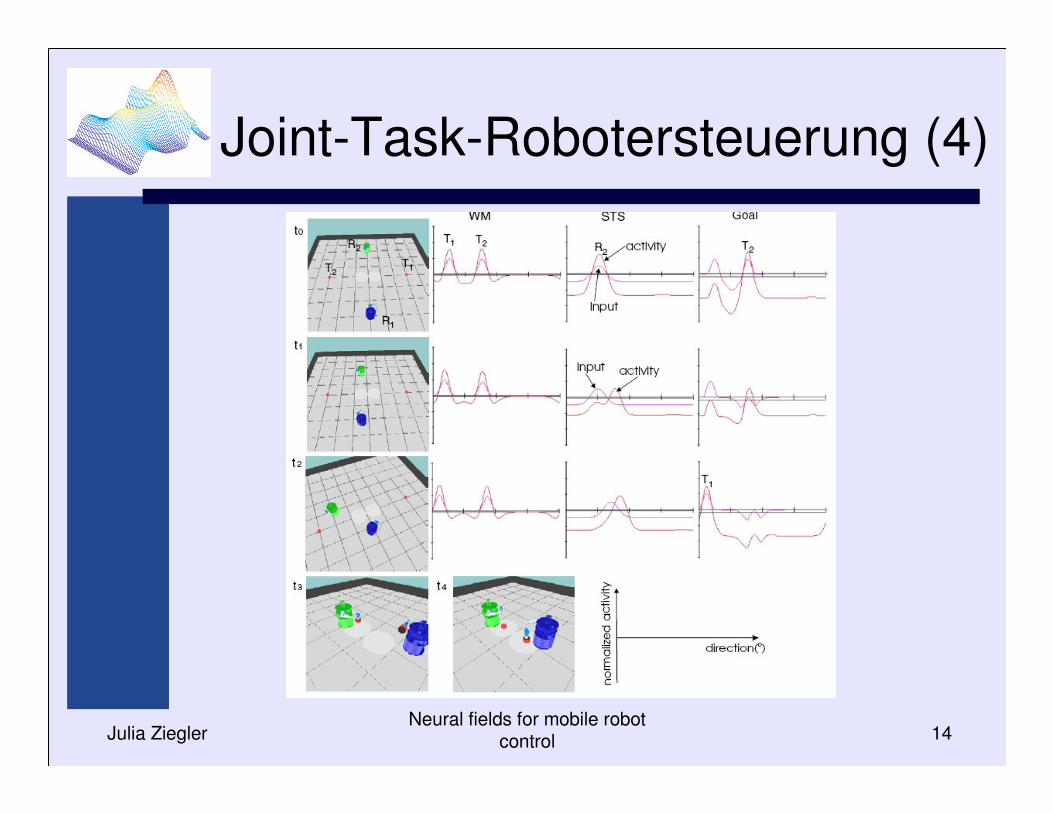
• Zwei Roboter erledigen eine Aufgabe gemeinsamÆ mehrere Gegenstände sollen in
definierten Bereich transportiert werden
Julia ZieglerNeural fields for mobile robot
control 12
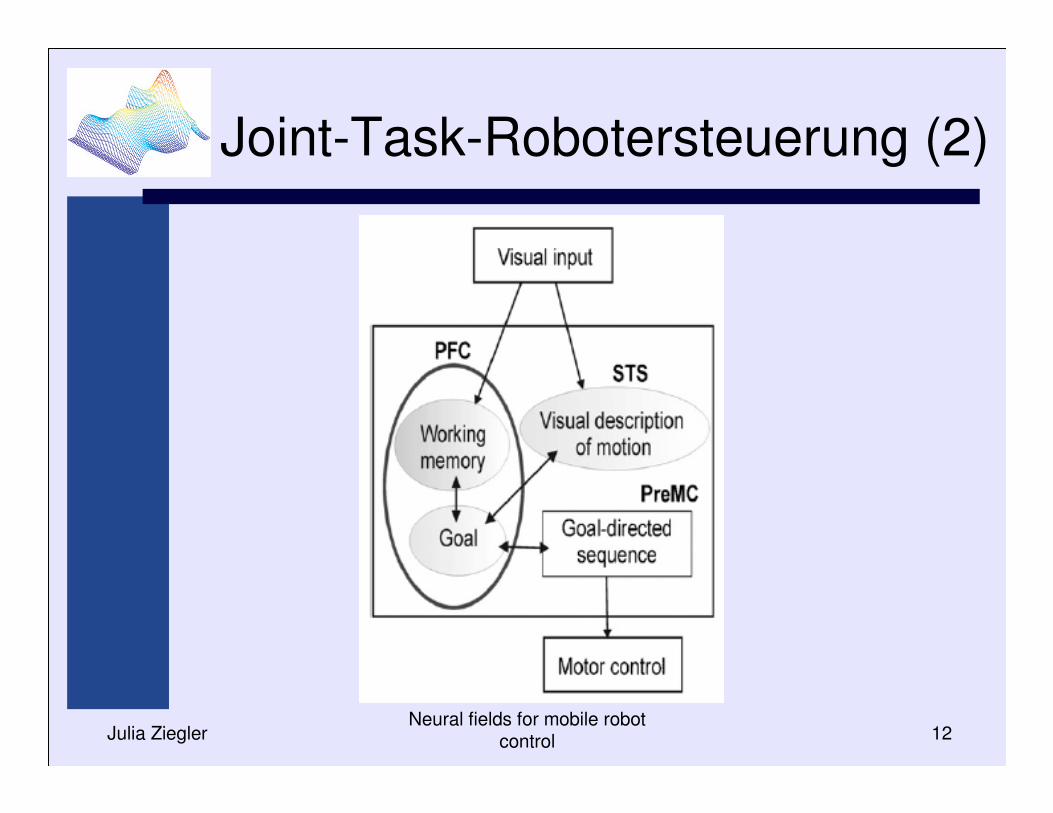
Joint-Task-Robotersteuerung (2)
Julia ZieglerNeural fields for mobile robot
control 13
Joint-Task-Robotersteuerung (3)
Julia ZieglerNeural fields for mobile robot
control 14
Joint-Task-Robotersteuerung (4)
Julia ZieglerNeural fields for mobile robot
control 15
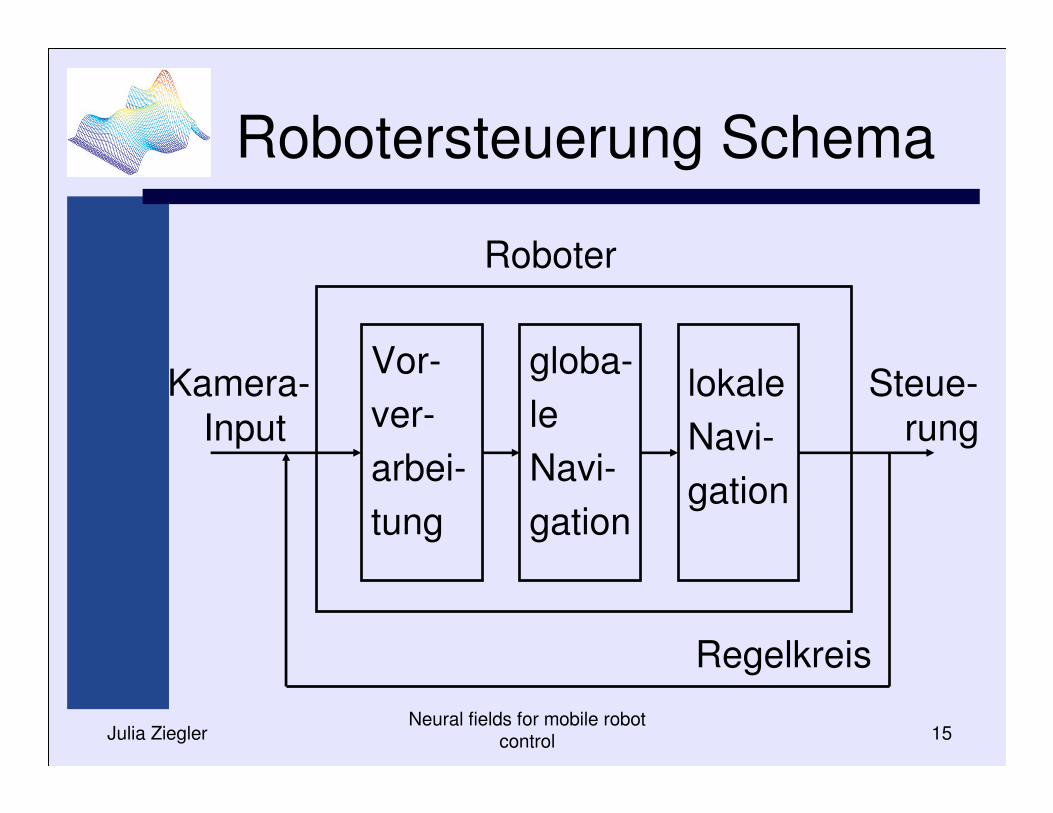
Robotersteuerung Schema
Roboter
Kamera-Input
Regelkreis
Steue-rung
Vor-ver-arbei-tung
globa-leNavi-gation
lokaleNavi-gation
Julia ZieglerNeural fields for mobile robot
control 16
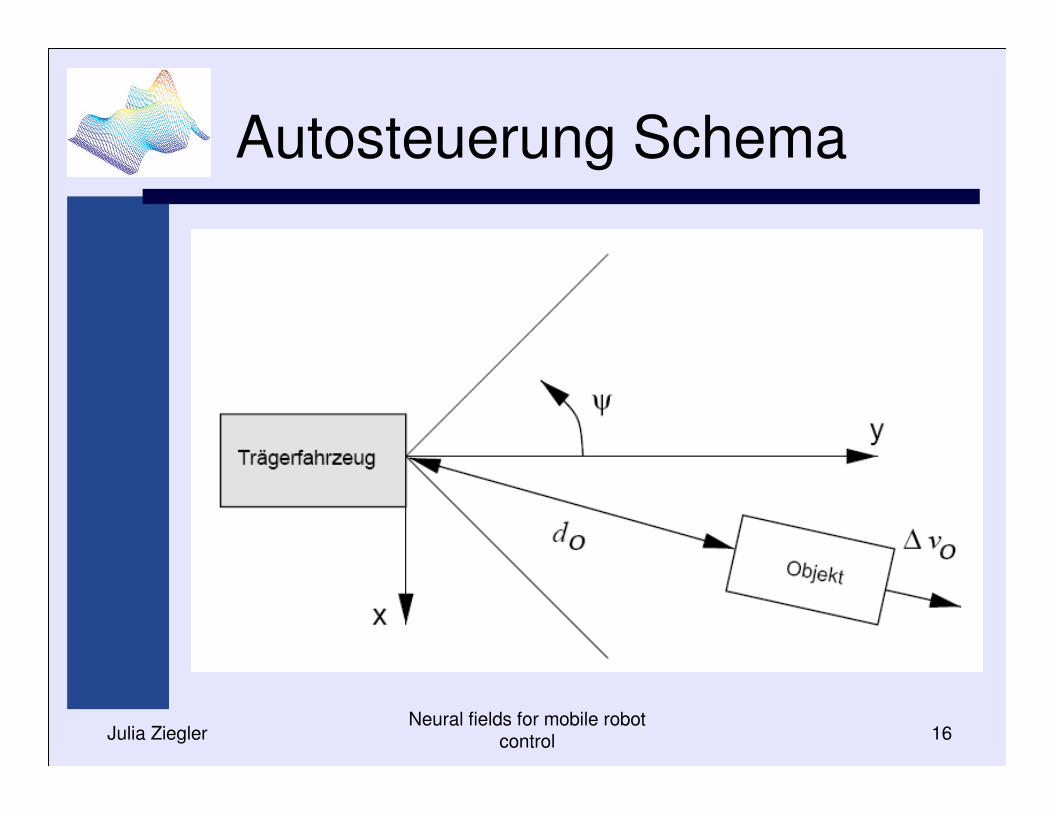
Autosteuerung Schema
Julia ZieglerNeural fields for mobile robot
control 17
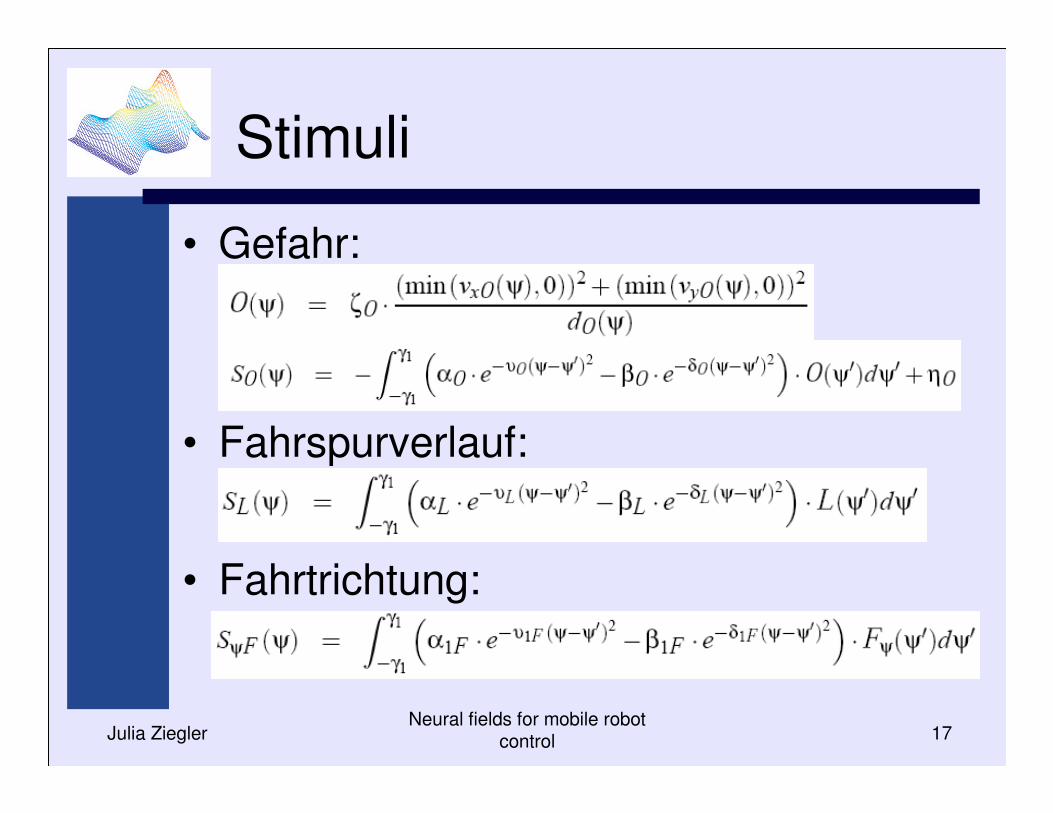
Stimuli
• Gefahr:
• Fahrspurverlauf:
• Fahrtrichtung:
Julia ZieglerNeural fields for mobile robot
control 18
Stimuli (2)
Julia ZieglerNeural fields for mobile robot
control 19
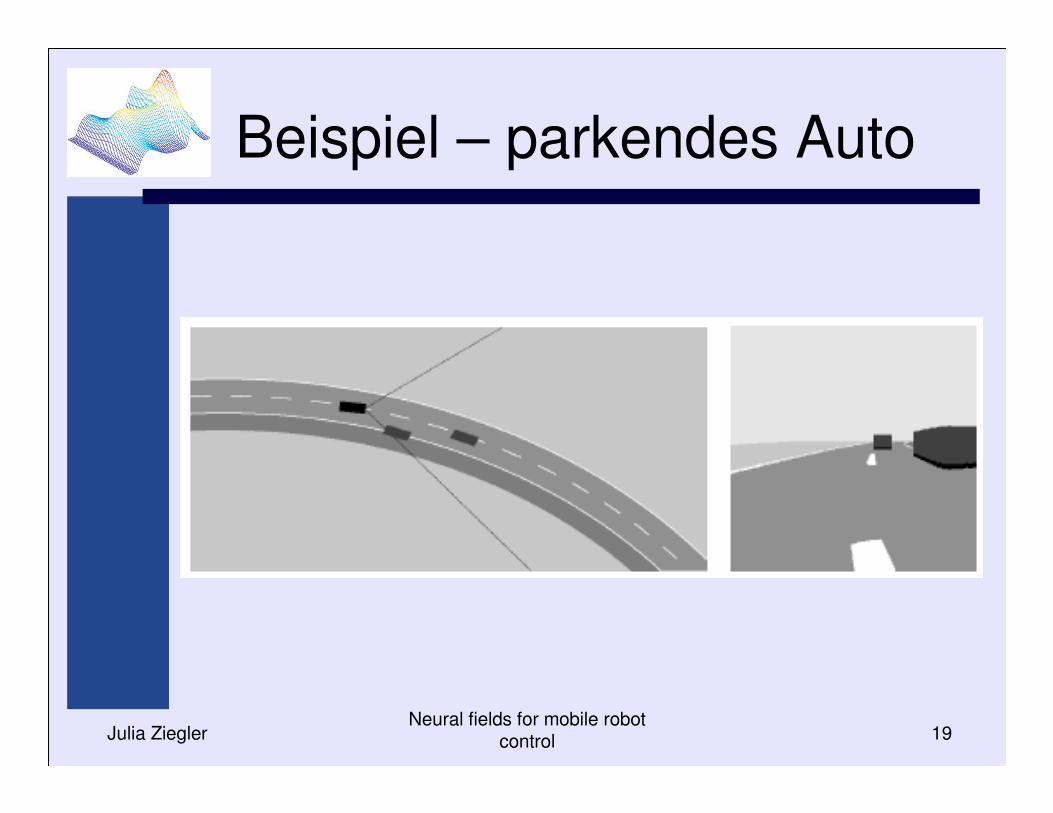
Beispiel – parkendes Auto
Julia ZieglerNeural fields for mobile robot
control 20
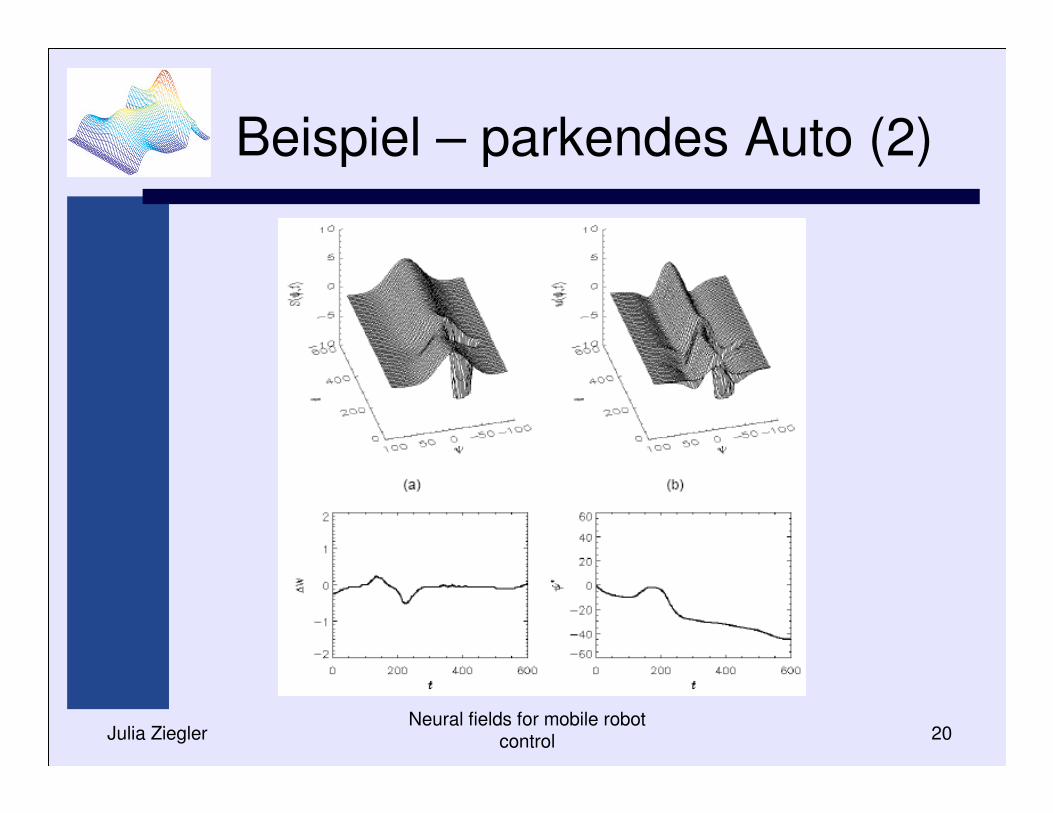
Beispiel – parkendes Auto (2)
Julia ZieglerNeural fields for mobile robot
control 21
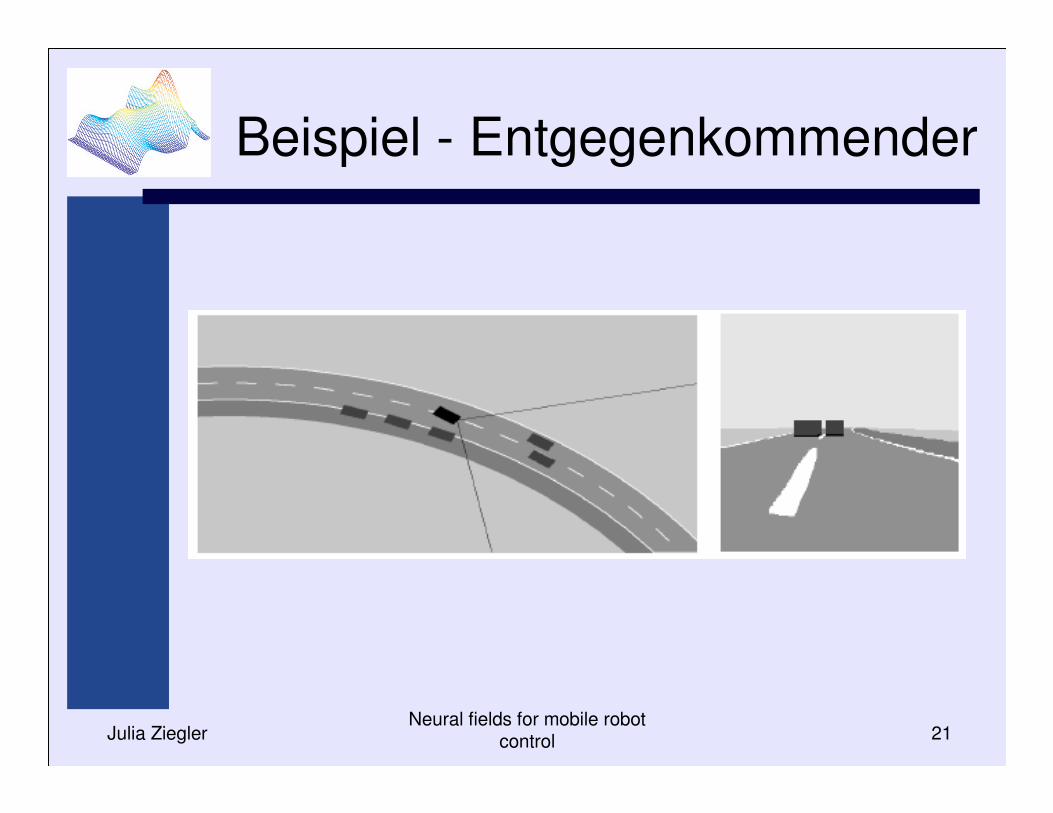
Beispiel - Entgegenkommender
Julia ZieglerNeural fields for mobile robot
control 22
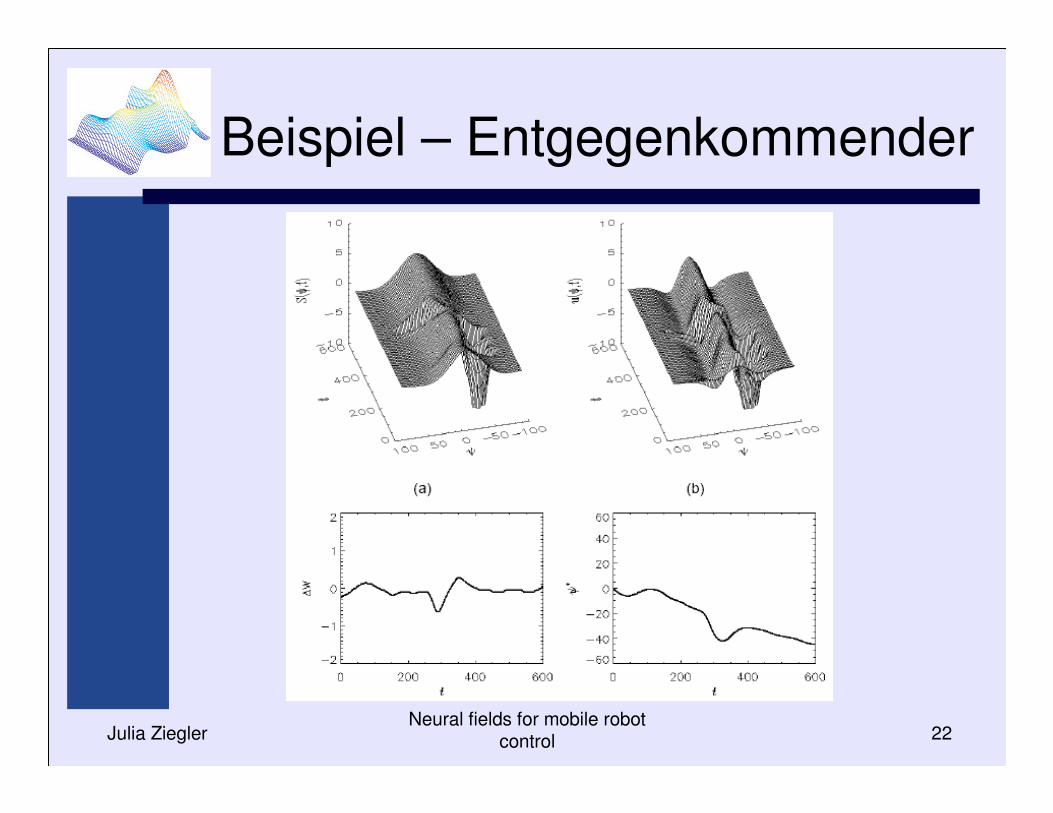
Beispiel – Entgegenkommender
Julia ZieglerNeural fields for mobile robot
control 23
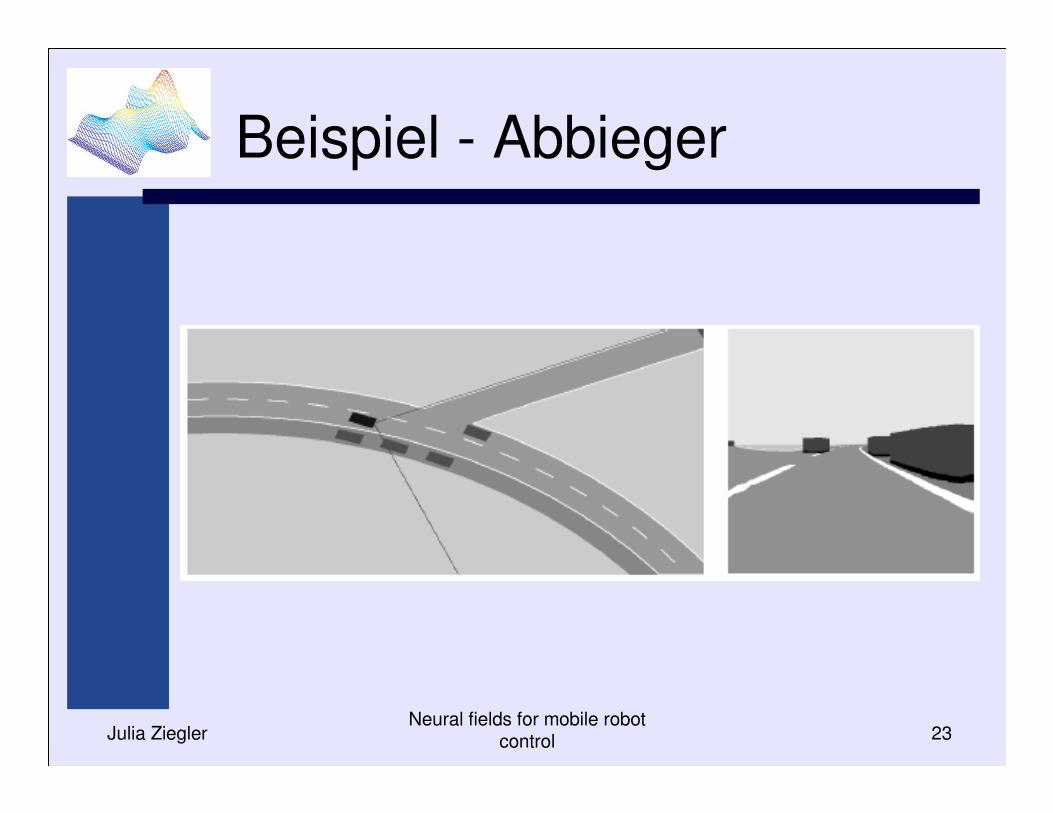
Beispiel - Abbieger
Julia ZieglerNeural fields for mobile robot
control 24
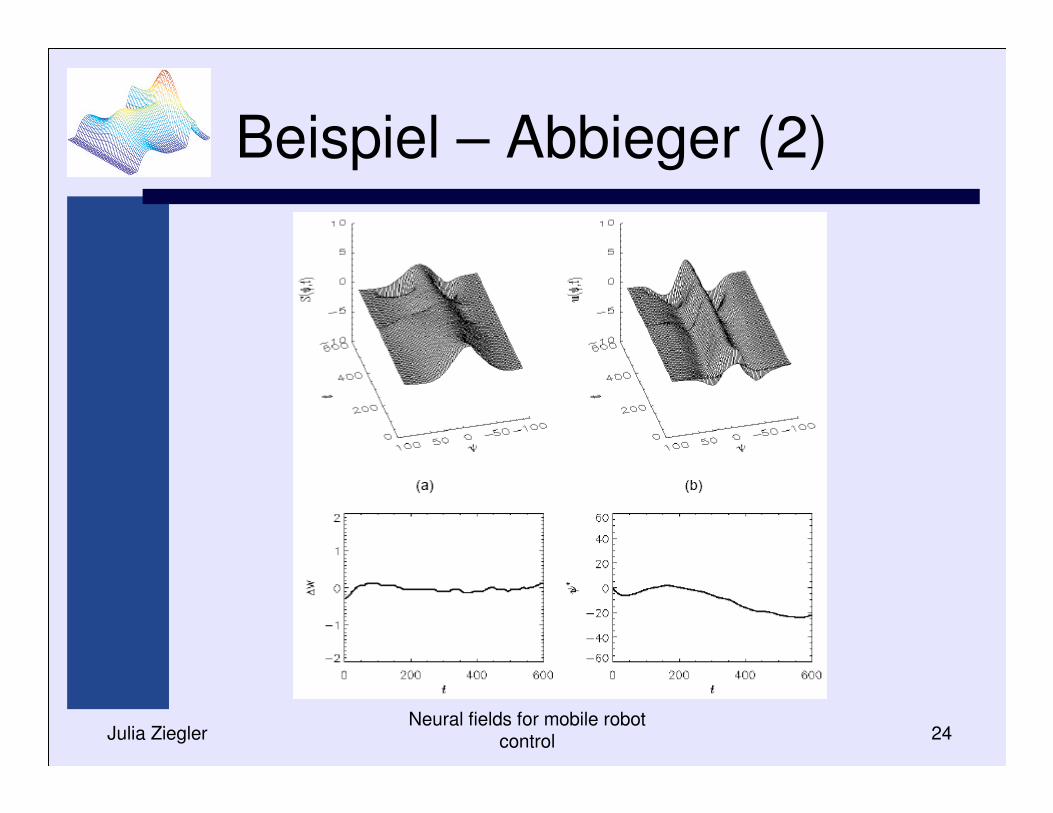
Beispiel – Abbieger (2)
Julia ZieglerNeural fields for mobile robot
control 25
Zusammenfassung
• Glatte, stabile Steuerung mittels neuronaler Felder
• Dynamischer Ansatz Æ Rückkopplung