«new paradigms for control theory»
DESCRIPTION
«NEW PARADIGMS FOR CONTROL THEORY». Romeo Ortega LSS-CNRS-SUPELEC Gif-sur-Yvette, France. Content. Background Proposal Examples. Facts. Modern (model-based) control theory is not providing solutions to new practical control problems - PowerPoint PPT PresentationTRANSCRIPT

«NEW PARADIGMS«NEW PARADIGMS FOR CONTROL FOR CONTROL THEORY»THEORY»
«NEW PARADIGMS«NEW PARADIGMS FOR CONTROL FOR CONTROL THEORY»THEORY»
Romeo OrtegaLSS-CNRS-SUPELEC
Gif-sur-Yvette, France

ContentContentContentContent
BackgroundProposalExamples

FactsFactsFactsFactsModern (model-based) control theory is not providing solutions to new practical control problems
Prevailing trend in applications: data-based « solutions »
Neural networks, fuzzy controllers, etc They might work but we will not understand why/when
New applications are truly multidomain
There is some structure hidden in «complex systems »
Revealed through physical laws Pattern of interconnection is more important than detail

Why?Why?Why?Why?Signal processing viewpoint is not adequate:
= Input-Output-Reference-Disturbance.
Classical assumptions not valid: linear + «small » nonlinearities interconnections with large impedances time-scale separations lumped effects
Methods focus on stability (of a set of given ODEs)
no consideration of the physical nature of the model.

ProposalProposalProposalProposalReconcile modelling with, and incorporate energy information into, control design.
How?How?Propose models that capture main physical ingredients:
energy, dissipation, interconnection
Attain classical control objectives (stability, performance) as by-products of:
Energy-shaping, interconnection and damping assignment.
Confront, via experimentation, the proposal with current practice.

Prevailing paradigmPrevailing paradigmPrevailing paradigmPrevailing paradigm
• Models
• Control objectives
• Controller design
Signal procesing viewpoint
Models
C
Pd
u
z
yzd
r s
P
r
du
s
zy
:
Uncertainty
Known structure,
• •
RHd D L

Control objectives z-zd « small »
effect of d on z « small »
Controller
y
zu:C
d
Class of admissible systems TOO LARGE !!
Conservativeness (min max designs)
High gain (sliding modes, backstepping…)
Complexity
Practically useless
Intrinsic to signal-processing viewpoint
Drawbacks!!!Drawbacks!!!

C I
Unmodelled
environment
i i i
x
c
ec
e
v v v
(Energy-based) Control by interconnection
Proposed alternativeProposed alternativeProposed alternativeProposed alternative

Models
PLANT:
• H(x) energy function, x state,
• (v,i) conjugated port variables,
• Geometric (Dirac) structure capturing energy exchange
• Dissipation
ENVIRONMENT:
• Passive port
• Flexibility and dissipation effects
• Parasitic dynamics
Control objectives
• Focus on energy and dissipation
• Shape and exchange pattern
Controller
C
I
• controller, Hc(z) energy
• power preserving

IDA-PBC of mechanical IDA-PBC of mechanical systemssystemsIDA-PBC of mechanical IDA-PBC of mechanical systemssystems
To stabilize some underactuated mechanical devices it is necessary to modify the total energy function. In open loop
Where qRn, pRn are the generalized position and momenta, respectively, M(q)=MT(q)>0 is the inertia matrix, and V(q) is the potential energy
MODELMODEL
Control uRm, and assume rank(G)=m < nConvenient to decompose u=ues(q,p)+udi(q,p)

TARGET TARGET DYNAMICSDYNAMICS
Desired (closed loop) energy function
where Md=MdT>0 and Vd(q)
with port controlled Hamiltonian dynamics
where

All assignable energy All assignable energy functions are characterized by a functions are characterized by a PDE!!PDE!!
All assignable energy All assignable energy functions are characterized by a functions are characterized by a PDE!!PDE!!
The PDE is parameterized by The PDE is parameterized by two free matrices (related to two free matrices (related to physics)physics)
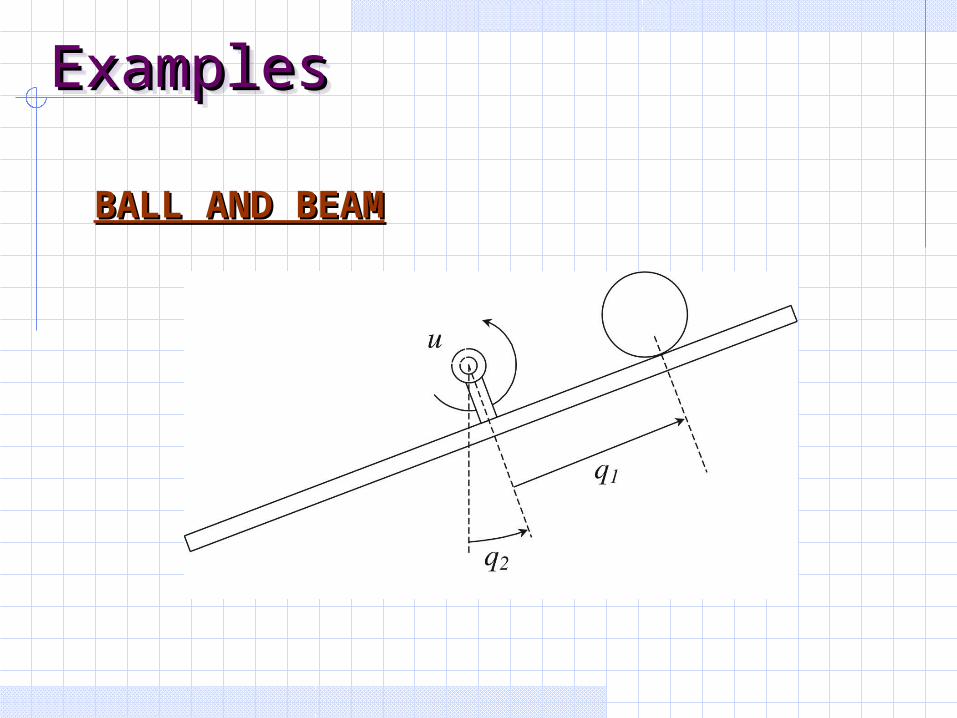
ExamplesExamplesExamplesExamples
BALL AND BEAMBALL AND BEAM

Ball and BeamBall and BeamBall and BeamBall and Beam
Ball and BeamBall and BeamBall and BeamBall and Beam

Vertical take-off and landing Vertical take-off and landing aircraftaircraftVertical take-off and landing Vertical take-off and landing aircraftaircraft

Cart with inverted pendulumCart with inverted pendulumCart with inverted pendulumCart with inverted pendulum

ExamplesExamplesExamplesExamples(PASSIVE) (PASSIVE) WALKING WALKING
• Plant: double pendulum
• Environement:
elastic (stiff)
Model

(Passive) walking(Passive) walking(Passive) walking(Passive) walking
Control objetive:
Shape energy

(Passive) walking(Passive) walking(Passive) walking(Passive) walking

(Passive) walking(Passive) walking(Passive) walking(Passive) walking
other other mechatronic mechatronic systems: systems:
teleoperators, robots in interaction (with environement)

• Plant: (controlled) wave eq.
• Environment: passive mech. contact
• model
• control objective: shape energy
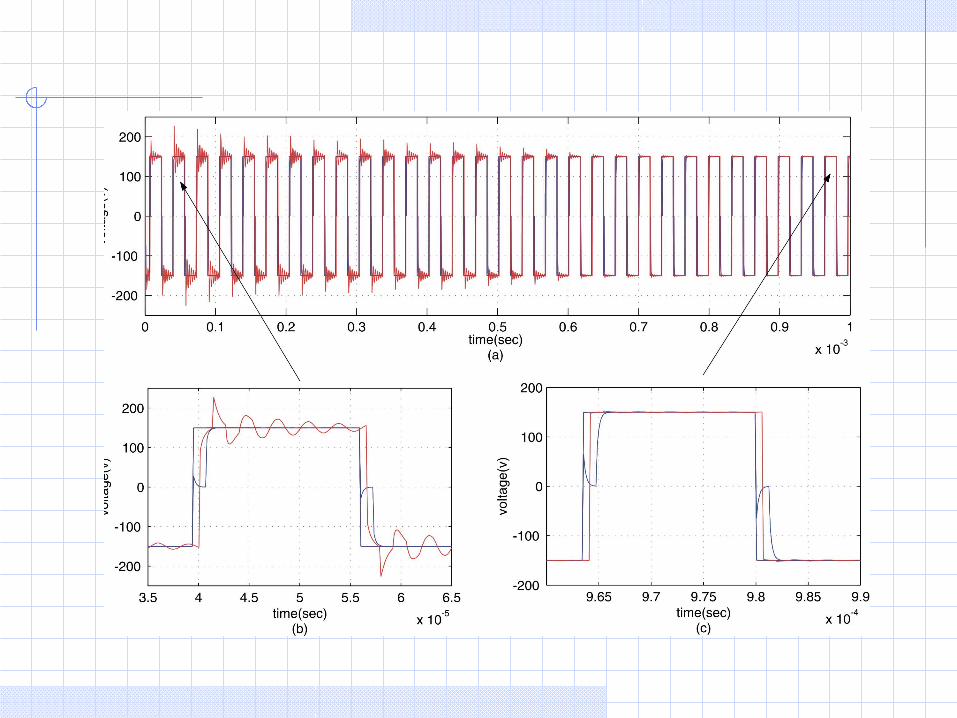
Piezoelectric actuatorsPiezoelectric actuatorsPiezoelectric actuatorsPiezoelectric actuators

Control through long cablesControl through long cablesControl through long cablesControl through long cablesE.g., overvoltage in drivesE.g., overvoltage in drives
• model
• control objective: change interconnection to suppress waves



Dual to teleoperators
Many examples in power electronics and power systems

Thank Thank you!!you!!Thank Thank you!!you!!