nghiÊn cỨu Ứng dỤng cÔng nghỆ gps trong quan trẮc...
TRANSCRIPT
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC MỎ ĐỊA CHẤT
PHẠM DOÃN MẬU
NGHIÊN CỨU ỨNG DỤNG CÔNG NGHỆ GPS
TRONG QUAN TRẮC BIẾN DẠNG
CÔNG TRÌNH THỦY ĐIỆN Ở VIỆT NAM
Ngành: Kỹ thuật Trắc địa - Bản đồ
Mã số : 62.52.05.03
TÓM TẮT LUẬN ÁN TIẾN SĨ KỸ THUẬT
HÀ NỘI – 2014
Công trình hoàn thành tại: Bộ môn Trắc địa công trình, Khoa Trắc địa,
Trường Đại học Mỏ - Địa chất
Người hướng dẫn khoa học:
1. PGS.TS Trần Khánh, Trường Đại học Mỏ - Địa chất
2. PGS.TS Nguyễn Quang Phúc, Trường Đại học Mỏ - Địa chất
Phản biện 1: PGS.TS Vũ Văn Thặng, Trường Đại học Xây dựng Hà Nội
Phản biện 2: TS. Hồ Thị Lan Hương, Trường Đại học Giao thông vận tải
Phản Biện 3: TS. Bùi Yên Tĩnh, Cục Bản đồ - Bộ Tổng tham mưu
Luận án sẽ được bảo vệ trước Hội đồng đánh giá luận án cấp Trường, tổ
chức tại: Trường Đại học Mỏ - Địa chất vào hồi .. giờ .. ngày ….. tháng …..
năm 2014.
Có thể tìm hiểu luận án tại:
- Thư viện Quốc gia, Hà Nội,
- Thư viện trường Đại học Mỏ - Địa chất
DANH MỤC CÁC CÔNG TRÌNH KHOA HỌC 1. Nguyễn Quang Phúc, Phạm Doãn Mậu (2004), Nghiên cứu ảnh hưởng của đại
lượng đo đến hình dạng và kích thước của elipse sai số, Tạp chí KHKT Mỏ - Địa
chất, Số 7/ 7-2004.
2. Nguyễn Quang Phúc, Nguyễn Anh Tuấn, Phạm Doãn Mậu (2004), Thiết kế tối
ưu theo vết cục bộ của ma trận Qx, Tuyển tập báo cáo KH Mỏ - Địa chất, 11-2004.
3. Nguyễn Quang Phúc, Phạm Doãn Mậu (2006), Tiêu chuẩn ổn định của các
điểm khống chế cơ sở trong quan trắc chuyển dịch ngang công trình, Tạp chí
KHKT Mỏ- Địa chất, Số 13/10-2006.
4. Trần Khánh, Phạm Doãn Mậu, Hứa Văn Vũ, Phạm Quốc Khánh (2007), Nghiên
cứu phương pháp thành lập và xử lý số liệu mạng lưới hỗn hợp GPS - Mặt đất trong
trắc địa công trình, Đề tài nghiên cứu khoa học cấp Bộ mã số B2005-36-37.
5. Trần Khánh, Phạm Doãn Mậu (2007), Phân tích độ ổn định lưới cơ sở thành lập
bằng công nghệ GPS trong quan trắc biến dạng công trình. Tạp chí KHKT Mỏ- Địa
chất, Số 20/10-2007.
6. Phạm Doãn Mậu (2009), Thực nghiệm quan trắc biến dạng đập thủy điện Tuyên
Quang bằng công nghệ GPS. Đề tài hỗ trợ NCS, Mã số N2009-32.
7. Phạm Doãn Mậu (2010), Thành lập và xử lý số liệu lưới GPS cơ sở trong quan
trắc chuyển dịch ngang công trình thủy điện. Đề tài hỗ trợ NCS, Mã số N2010-32.
8. Phạm Doãn Mậu (2010), Nghiên cứu thuật toán phân tích độ ổn định các mốc cơ
sở quan trắc chuyển dịch ngang công trình thủy điện đo bằng công nghệ GPS. Đề
tài nghiên cứu khoa học và công nghệ, trường Đại học Tài nguyên và Môi trường Hà
Nội.
9. Trần Khánh, Phạm Doãn Mậu (2010), Nghiên cứu đề xuất một số giải pháp nâng
cao hiệu quả quan trắc biến dạng các công trình thủy điện, Tuyển tập báo cáo Hội
nghị khoa học Bộ Xây dựng (Hệ thống thiết bị quan trắc với chất lượng công trình).
10. Nguyễn Quang Phúc, Hoàng Thị Minh Hương, Lê Đức Tình, Phạm Doãn Mậu
(2011), Kết quả thực nghiệm ứng dụng công nghệ GPS trong quan trắc chuyển dịch
ngang công trình, Tạp chí KHKT Mỏ Địa chất, Số 36/10-2011.


MỞ ĐẦU
1. Tính cấp thiết của đề tài
Trong những năm gần đây công nghệ GPS đã được ứng dụng rộng rãi
trong sản xuất trắc địa - địa hình, đây là công nghệ đo đạc tiên tiến, rất thuận
lợi trong công tác xây dựng các mạng lưới khống chế trắc địa. Công nghệ
GPS có nhiều tiềm năng để thành lập lưới khống chế chuyên dùng trong khảo
sát, thi công và vận hành các công trình kỹ thuật.
Ở nước ngoài đã có nhiều công trình nghiên cứu được công bố về ứng
dụng công nghệ GPS để thành lập các mạng lưới trắc địa chính xác cao, trong
đó có lưới quan trắc chuyển dịch biến dạng công trình. Tuy nhiên, ở Việt
Nam việc ứng dụng công nghệ GPS vào mục đích quan trắc biến dạng công
trình vẫn chưa được đề cập thỏa đáng trong các nghiên cứu khoa học cũng
như trong ứng dụng thực tế.
Trong bối cảnh nêu trên, đề tài: "Nghiên cứu ứng dụng công nghệ
GPS trong quan trắc biến dạng công trình thuỷ điện ở Việt Nam" được đặt
ra nhằm xác định các luận cứ khoa học và thực tiễn của việc ứng dụng công
nghệ đo đạc vệ tinh nói chung, công nghệ GPS nói riêng trong quan trắc biến
dạng công trình thủy điện trong điều kiện Việt Nam. Kết quả đề tài cho phép
nâng cao hiệu quả kinh tế và kỹ thuật của công tác quan trắc biến dạng công
trình.
2. Mục đích, đối tượng và phạm vi nghiên cứu
- Nghiên cứu, đánh giá khả năng ứng dụng công nghệ GPS để quan trắc
chuyển dịch ngang công trình thuỷ điện trong điều kiện Việt Nam.
- Đối tượng nghiên cứu là các công trình thuỷ điện ở Việt Nam, trong
đó đi sâu nghiên cứu công tác quan trắc tuyến đập thủy điện.
- Phạm vi nghiên cứu của luận án bao gồm: Phân tích lý thuyết, khảo
sát thực nghiệm ứng dụng GPS để quan trắc chuyển dịch ngang các công
trình thuỷ điện.
3. Nội dung nghiên cứu
1- Nghiên cứu đặc điểm cấu trúc và yêu cầu quan trắc biến dạng các
công trình thuỷ điện. Phân tích, so sánh, đánh giá các phương pháp quan trắc
đang được sử dụng ở Việt Nam.
2- Nghiên cứu, đánh giá khả năng và đặc điểm ứng dụng GPS để quan
trắc chuyển dịch ngang công trình thuỷ điện, trong đó chú ý đến việc thành
lập lưới khống chế một cấp trong quan trắc chuyển dịch ngang đập thủy điện.
3- Nghiên cứu một số vấn đề về xử lý số liệu GPS trong quan trắc
chuyển dịch ngang công trình thuỷ điện.
4- Thực nghiệm ứng dụng GPS quan trắc chuyển dịch ngang công trình
ở thực tế sản xuất Việt Nam.
4. Ý nghĩa khoa học và thực tiễn của luận án
Ý nghĩa khoa học: Góp phần phát triển và hoàn thiện ứng dụng công
nghệ GPS cho mục đích quan trắc chuyển dịch ngang công trình thuỷ điện.
Ý nghĩa thực tiễn: Các kết quả nghiên cứu có thể được ứng dụng để
quan trắc chuyển dịch ngang đối với các công trình ở thực tế sản xuất nhằm
giảm thời gian công tác và nâng cao hiệu quả kinh tế mà vẫn đảm bảo yêu
cầu kỹ thuật.
5. Các luận điểm bảo vệ
Luận điểm thứ nhất: Trong điều kiện hiện nay ở nước ta, hoàn toàn có
thể sử dụng công nghệ GPS để quan trắc chuyển dịch ngang các công trình
thuỷ điện với yêu cầu độ chính xác cỡ ± 3 mm.
Luận điểm thứ hai: Để ứng dụng công nghệ GPS cần phải xây dựng hệ
thống thuật toán và quy trình hợp lý xử lý số liệu lưới hỗn hợp GPS-mặt đất
trong quan trắc biến dạng công trình thủy điện.
6. Các điểm mới của luận án
1- Đề xuất phương pháp thiết kế đồ hình lưới GPS cho mục đích quan
trắc chuyển dịch ngang công trình thủy điện ở Việt Nam theo hình thức lưới
khống chế một cấp. Kiểm chứng, đánh giá khả năng ứng dụng công nghệ
GPS để quan trắc chuyển dịch một số đập thủy điện ở nước ta.
2- Đề xuất hệ thuật toán và quy trình hợp lý để xử lý số liệu lưới quan
trắc chuyển dịch ngang công trình với các nội dung: Phân tích độ ổn định hệ
thống điểm mốc cơ sở, tính toán bình sai lưới mặt bằng quan trắc thành lập
theo phương pháp kết hợp các trị đo GPS với trị đo mặt đất.
7. Cấu trúc và nội dung luận án
Ngoài phần mở đầu, kết luận, luận án được trình bày trong 4 chương
với gần 100 trang thuyết minh, hình vẽ, bảng biểu.
Chương 1: TỔNG QUAN VỀ QUAN TRẮC BIẾN DẠNG
CÔNG TRÌNH THỦY ĐIỆN
1.1 Đặc điểm cấu trúc của công trình thủy điện ở Việt Nam
1.1.1 Giới thiệu chung
1.1.2 Các hạng mục chủ yếu của công trình thủy điện
1.1.2.1 Hồ chứa nước
1.1.2.2 Các công trình chính
a) Đập dâng tạo hồ
b) Đập tràn.
c) Nhà máy thuỷ điện: Thông thường có hai loại nhà máy thuỷ điện là nhà
máy thuỷ điện kiểu sau đập, nhà máy thuỷ điện kiểu đường dẫn.
d) Các công trình tuyến năng lượng (kênh dẫn, đường hầm dẫn nước)
1.1.2.3 Các công trình phụ trợ: Công trình phục vụ cho thi công và sinh hoạt.
1.2 Mục đích, nhiệm vụ và yêu cầu độ chính xác quan trắc biến dạng
công trình thủy điện
1.2.1 Mục đích, nhiệm vụ và đối tượng quan trắc
Quan trắc chuyển dịch và biến dạng công trình nhằm mục đích xác định
mức độ chuyển dịch biến dạng, từ đó có biện pháp xử lý, đề phòng các tai
biến có thể xảy ra trong quá trình xây dựng và sử dụng công trình. Đối tượng
quan trắc tại công trình thủy điện là tuyến đập, đường ống áp lực và nhà máy.
1.2.2 Yêu cầu độ chính xác quan trắc
Yêu cầu độ chính xác của công tác quan trắc chuyển dịch ngang công
trình thủy điện được xác định dựa vào các chỉ tiêu cơ lý của nền móng công
trình, đặc điểm kết cấu công trình.
1.2.3 Chu kỳ quan trắc
Thời gian giữa các chu kỳ quan trắc phụ thuộc vào giai đoạn thi công và
vận hành công trình. Trong giai đoạn thi công, thời gian quan trắc giữa hai
chu kỳ sẽ ngắn hơn trong giai đoạn quản lý, sử dụng và vận hành công trình.
1.3 Các phương pháp thành lập lưới quan trắc biến dạng công trình
1.3.1 Phương pháp mặt đất
Đây là phương pháp truyền thống sử dụng các thiết bị đo ngắm trực tiếp
trên mặt đất tự nhiên. Lưới được thành lập chủ yếu bằng các phương pháp:
lưới tam giác, lưới đa giác, lưới giao hội, đo hướng chuẩn.

1.3.2 Phương pháp GPS
Ưu điểm của phương pháp GPS là có thể thu tín hiệu ở mọi nơi, mọi
lúc, không phụ thuộc vào thời tiết và cũng không đòi hỏi sự thông hướng
giữa các điểm mặt đất, thời gian thi công nhanh.
1.4 Tổng quan về tình hình nghiên cứu và triển khai ứng dụng công nghệ
GPS để quan trắc biến dạng công trình
1.4.1 Tình hình nghiên cứu lý thuyết
.1 Trên thế giới: Các hướng nghiên cứu chủ yếu được thực hiện là: Nghiên
cứu ứng dụng các thiết bị hiện đại trong quan trắc biến dạng công trình;
Nghiên cứu phương pháp và quy trình quan trắc; Nghiên cứu việc xử lý số
liệu quan trắc ngoại nghiệp và phân tích, đánh giá chuyển dịch biến dạng
công trình trên cơ sở kết quả quan trắc.
1.4.1.2 Ở Việt Nam: Nghiên cứu ứng dụng thiết bị công nghệ hiện đại trong
đó có công nghệ GPS trong quan trắc chuyển dịch ngang các công trình kỹ
thuật. Nghiên cứu về phương pháp thiết kế và xử lý số liệu quan trắc:
1.4.2 Tình hình thực hiện quan trắc biến dạng một số công trình điển
hình bằng công nghệ GPS
1.4.2.1 Trên thế giới: Hiện nay, trên thế giới hầu hết các công trình thủy điện
lớn của mỗi quốc gia đều đã được quan trắc biến dạng với các thiết bị đo đạc
hiện đại nhất, trong đó nhiều công trình đã ứng dụng công nghệ GPS.
1.4.2.2 Ở Việt Nam: Ở Việt nam công tác quan trắc biến dạng đã được chú
trọng và được triển khai ở hầu hết tất cả các công trình kỹ thuật, tuy nhiên
công nghệ GPS mới chỉ được ứng dụng dưới dạng thử nghiệm.
1.5 Một số nhận xét đánh giá về công tác quan trắc biến dạng công trình
1.5.1 Nhận xét chung
Qua việc tìm hiểu tình hình nghiên cứu tổng quan của công tác quan trắc
biến dạng ở thế giới và trong nước có thể rút ra một số nhận xét như sau:
1- Ở Việt nam, chủ yếu sử dụng các thiết bị công nghệ đo đạc nhập
khẩu, chưa có điều kiện chế tạo các thiết bị đo chuyên dùng cho công tác
quan trắc biến dạng công trình.
2- Tại các công trình lớn ở Việt Nam, quan trắc biến dạng chủ yếu vẫn
thực hiện theo chu kỳ với các thiết bị và công nghệ truyền thống. Việc ứng
dụng công nghệ GPS để quan trắc biến dạng công trình thủy điện còn hạn
chế, mới chỉ được nghiên cứu về lý thuyết và một số thử nghiệm ban đầu.
3- Trong công tác xử lý số liệu đã áp dụng các phương pháp chặt chẽ để
xử l ý số liệu đo đạc ngoại nghiệp.
4- Trong thực tế sản xuất đã ứng dụng công nghệ tin học để tự động hóa
quá trình tính toán. Tuy vậy vẫn chưa có phần mềm chuyên dùng để xử lý số
liệu GPS quan trắc biến dạng công trình.
1.5.2 Giới hạn nghiên cứu của luận án
Trong luận án đã đặt ra và nghiên cứu các nội dung sau:
- Đặc điểm cấu trúc và yêu cầu quan trắc biến dạng công trình thuỷ điện.
Phân tích, đánh giá các phương pháp quan trắc đang được sử dụng trong thực
tế sản xuất.
- Nghiên cứu, đánh giá khả năng và xác định đặc điểm ứng dụng GPS để
quan trắc chuyển dịch ngang công trình thuỷ điện.
- Nghiên cứu một số vấn đề vể xử lý số liệu GPS trong quan trắc chuyển
dịch công trình thuỷ điện.
- Thực nghiệm ứng dụng GPS quan trắc chuyển dịch ngang công trình ở
thực tế sản xuất.
Chương 2: KHẢO SÁT KHẢ NĂNG ỨNG DỤNG CÔNG NGHỆ GPS
ĐỂ QUAN TRẮC CHUYỂN DỊCH NGANG CÔNG TRÌNH
2.1 Nguyên l í và kỹ thuật định vị GPS
2.1.1 Giới thiệu chung về hệ thống định vị vệ tinh
Hiện nay các hệ thống định vị về tinh có tiềm năng ứng dụng hiệu quả
trong trắc địa là NAVSTAR - GPS (Mỹ), GLONASS (Nga), Galileo (Cộng
đồng châu Âu), Bắc đẩu (Trung Quốc)… Các hệ thống định vị nêu trên có
nguyên lý cấu trúc chung, bao gồm 3 thành phần như sau:
1- Đoạn không gian: bao gồm một số vệ tinh trên quỹ đạo.
2- Đoạn điều khiển: bao gồm một trạm điều khiển trung tâm và một số
trạm theo dõi phân bố tại những vị trí khác nhau trên trái đất.
3- Đoạn sử dụng: bao gồm các thiết thu và xử lý tín hiệu định vị vệ tinh.
2.1.2 Nguyên lý định vị GPS
Có 2 loại hình định vị cơ bản là định vị tuyệt đối và định vị tương đối,
trong đó định vị tương đối cho phép xác định số gia tọa độ với độ chính xác
cao và được áp dụng để xây dựng các mạng lưới trắc địa chuyên dùng.

2.1.3 Các nguồn sai số trong đo GPS
Trong luận án đã xem xét biện pháp làm giảm ảnh hưởng của các nguồn
sai số trong định vị vệ tinh, bao gồm: sai số do đồng hồ vệ tinh và máy thu,
sai số quỹ đạo vệ tinh, ảnh hưởng của tầng ion và tầng đối lưu, tầm nhìn vệ
tinh và sự trượt chu kỳ, hiện tượng đa tuyến, sự suy giảm độ chính xác do đồ
hình các vệ tinh, các sai số do người đo, sai số do lệch tâm pha của anten.
2.2 Đặc điểm thành lập lưới quan trắc chuyển dịch ngang công trình
bằng công nghệ GPS
2.2.1 Cấu trúc của mạng lưới quan trắc chuyển dịch ngang công trình
Hệ thống lưới quan trắc biến dạng công trình bao gồm 2 bậc lưới, bậc
một là lưới cơ sở và bậc hai là lưới quan trắc. Yêu cầu độ chính xác chuyển
dịch đối với các cấp lưới trong quan trắc biến dạng được xác định theo các
công thức:
- Đối với lưới cơ sở:
21
C S
q
q
Mm
k
(2.1)
- Đối với lưới quan trắc:
2
.
1Q T
q
q
k Mm
k
(2.2)
Trong các công thức 2.1 và 2.2: Mq là yêu cầu sai số xác định chuyển dịch
công trình; k là hệ số giảm độ chính xác giữa 2 cấp lưới, có thể chọn k = 2-3.
2.2.2 Thiết kế đồ hình lưới GPS
Vị trí điểm và đồ hình lưới GPS được thiết kế linh hoạt hơn so với lưới
mặt đất do không cần đặt ra vấn đề thông hướng giữa các điểm trong lưới. Có
3 phương thức cơ bản để liên kết giữa các cạnh đo GPS để thành lập lưới
quan trắc là liên kết điểm, liên kết cạnh và liên kết cạnh - điểm. Trong đó,
đối với các mạng lưới có yêu cầu độ chính xác cao như lưới quan trắc biến
dạng công trình, khuyến cáo nên áp dụng phương thức liên kết cạnh - điểm.
2.3 Đánh giá các phương pháp thành lập lưới quan trắc chuyển dịch
ngang công trình - phương án lưới 2 cấp
Trong luận án đã thực hiện việc ước tính độ chính xác của một số mạng
lưới quan trắc đang được triển khai tại các công trình thực tế. Hai công trình
được chọn để tính toán thực nghiệm là công trình thuỷ điện Hoà Bình và

công trình thuỷ điện Tuyên Quang. Để có cơ sở so sánh đánh giá, đã thực
hiện tính toán ước tính độ chính xác đối với các phương án lưới đuợc thành
lập theo công nghệ đo đạc mặt đất và lưới thành lập theo công nghệ GPS. Phân tích kết quả ước tính cho thấy, sai số vị trí điểm lưới GPS dao
động trong khoảng 4 6mm. Độ chính xác lưới đo mặt đất (giao hội cạnh)
đạt được cao hơn (sai số vị trí điểm nằm trong khoảng 2 4mm). Để nâng
cao hơn nữa độ chính xác của lưới GPS thì cần phải tăng số lượng cạnh đo để
có kết cấu đồ hình chặt chẽ hơn.
2.4 Đề xuất phương án thành lập lưới 1 cấp quan trắc chuyển dịch ngang
công trình
2.4.1 Khảo sát độ chính xác lưới 1 cấp
Một biện pháp để tăng tính chặt chẽ của đồ hình lưới GPS là gộp bậc
lưới cơ sở và bậc lưới quan trắc thành một mạng lưới thống nhất. Để khảo sát
khả năng này, trong luận án đã thực hiện ước tính độ chính xác cho 2 mạng
lưới quan trắc ở thuỷ điện Hoà Bình và Tuyên Quang dưới hình thức lưới 1
cấp, coi những mạng lưới trên là lưới GPS tự do. Số liệu tính toán cho thấy,
các chỉ tiêu độ chính xác của lưới 1 cấp được cải thiện một cách đáng kể.
Trên cơ sở khoa học và thực tiễn này, đề xuất nên xây dựng lưới GPS quan
trắc biến dạng công trình thuỷ điện theo hình thức lưới 1 cấp.
2.4.2 Nhận xét đánh giá về các phương án xây dựng lưới
Từ cơ sở phân tích đặc điểm công nghệ và khả năng độ chính xác đạt
được của các phương của các phương pháp thành lập lưới (mặt đất và GPS)
có thể rút ra một số nhận xét, đánh giá cơ bản như sau:
1- So sánh về độ chính xác của các phương pháp thành lập lưới
- Đối với mạng thành lập theo phương pháp đo đạc mặt đất thì lưới đo
toàn cạnh phù hợp với công nghệ đo đạc hiện đại, thời gian thi công loại lưới
này được rút ngắn đáng kể so với loại lưới có đo thêm góc.
- Đối với lưới quan trắc GPS thành lập theo phương án 2 cấp: Lưới
GPS có độ chính xác thấp hơn lưới thành lập theo phương án đo cạnh độ
chính xác cao (mS = 1mm+1ppm), tương đương với độ chính xác của lưới đo
cạnh độ chính xác trung bình (mS = 3mm+2ppm). Sai số vị trí điểm của lưới
quan trắc GPS đạt cỡ 3mm và phân bố tương đối đồng đều giữa các điểm
lưới.
- Lưới quan trắc GPS thành lập theo phương án 1 cấp có độ chính xác
vị trí điểm quan trắc tương đương với lưới GPS 2 cấp, nhưng các điểm cơ sở
có độ chính xác cao hơn hẳn so với lưới 2 cấp. Thực tế, với công nghệ GPS
có thể triển khai đo đạc đồng thời cả 2 cấp lưới, nên lưới 1 cấp có ưu điểm
hơn hẳn lưới 2 cấp ở phương diện tổ chức đo đạc ngoại nghiệp.
2- So sánh về quy trình công nghệ thành lập
- Trong mạng lưới cơ sở thành lập bằng phương pháp đo đạc mặt đất,
các điểm lưới phải phân bố gần công trình và cần có tầm thông hướng tốt
giữa các điểm trong lưới, vì vậy việc chọn điểm sẽ gặp nhiều hạn chế.
- Lưới GPS không đòi hỏi phải có sự thông hướng trực tiếp giữa các
điểm, do đó có nhiều khả năng chọn được điểm mốc cơ sở ở các vị trí có ổn
định cao, nằm ngoài phạm vi ảnh hưởng biến dạng của công trình. Ngoài ra
công nghệ GPS còn có ưu điểm hơn công nghệ đo đạc mặt đất ở chỗ là có thể
triển khai thực hiện đo đạc trong mọi điều kiện thời tiết và thời gian.
Có thể đánh giá sơ bộ rằng, công nghệ GPS có rất nhiều tiềm năng để
thành lập các mạng lưới quan trắc chuyển dịch ngang công trình thuỷ điện, là
loại công trình có các hạng mục phân bố trên phạm vi tương đối rộng, có điều
kiện thông hướng tốt lên bầu trời, thuận lợi cho việc thu tín hiệu vệ tinh.
2.5 Giải pháp nâng cao hiệu quả công nghệ GPS trong quan trắc chuyển
dịch ngang công trình thủy điện
2.5.1 Chọn điểm và thiết kế lưới GPS
Thiết kế lưới GPS và chọn điểm cần dựa trên bản đồ địa hình tỷ lệ càng
lớn càng tốt, khi chọn điểm cần tránh tạo thành các cạnh bị che chắn đối
xứng.. Đối với lưới GPS yêu cầu thông hướng giữa một số cặp điểm. Cần xác
định biện pháp giảm ảnh hưởng của hiện tượng đa đường dẫn.
2.5.2 Tổ chức đo đạc
Để bảo đảm thành công cho công tác đo GPS cần phải tiến hành lập kế
hoạch đo, cụ thể là xác định thời gian đo tối ưu là khoảng thời gian trong đó
có số vệ tinh quan trắc đồng thời là tối đa và có PDOP không vượt quá giá trị
cho phép.
2.5.3 Các biện pháp nâng cao chất lượng xử lý kết quả đo cạnh
Chất lượng tính cạnh sẽ được thể hiện thông qua việc lựa chọn lời giải:
Việc xử lý cạnh là quá trình liên kết các trị đo thành các cạnh với chất lượng

tốt nhất có thể. Các lời giải dựa vào chất lượng của số liệu đo GPS và tập hợp
các giá trị đặt cho việc xử lý cạnh như: góc ngưỡng, số vệ tinh...
2.5.4 Tính toán và bình sai mạng lưới
Cần bình sai tự do với một điểm có B, L, H trên WGS-84, các điểm còn
lại dùng làm các điểm kiểm tra.
2.6 Thực nghiệm thành lập lưới quan trắc chuyển dịch ngang công trình
2.6.1 Đặt vấn đề
Với mục đích kiểm nghiệm khả năng ứng dụng công nghệ GPS để
thành lập lưới mặt bằng quan trắc chuyển dịch ngang công trình, trong luận
án đã triển khai xây dựng một mạng lưới GPS quan trắc chuyển dịch ở thực
địa và tiến hành 2 chu kỳ đo. Tại các điểm quan trắc đã thiết kế bổ sung bộ gá
đế máy dưới dạng mặt bích hình chữ nhật với một số vị trí đặt máy được
chọn trước theo hình thức định tâm bắt buộc.
2.6.2 Thiết kế sơ đồ lưới và tổ chức đo đạc thực nghiệm
Hình 2.8: Sơ đồ mạng lưới thực nghiệm
Mạng lưới thực nghiệm được thiết kế gồm 6 điểm, trong đó có 3 điểm
cơ sở và 3 điểm quan trắc. Công tác đo lưới được thực hiện bằng 6 máy thu
Trimble R3, tạo thành mạng lưới có đồ hình liên kết rất chặt chẽ. Mỗi ca đo
kéo dài 1,5 giờ, giữa 2 ca đo tại một số điểm quan trắc lần lượt thay đổi vị trí
máy thu đến các vị trí mới, cách vị trí ban đầu một khoảng ấn định trước.
2.6.3 Kết quả thực nghiệm
Kết quả đo thực nghiệm trong 2 chu kỳ đã xác định được giá trị chuyển
KC-01
KC-02
KC-03
QT-03
QT-01
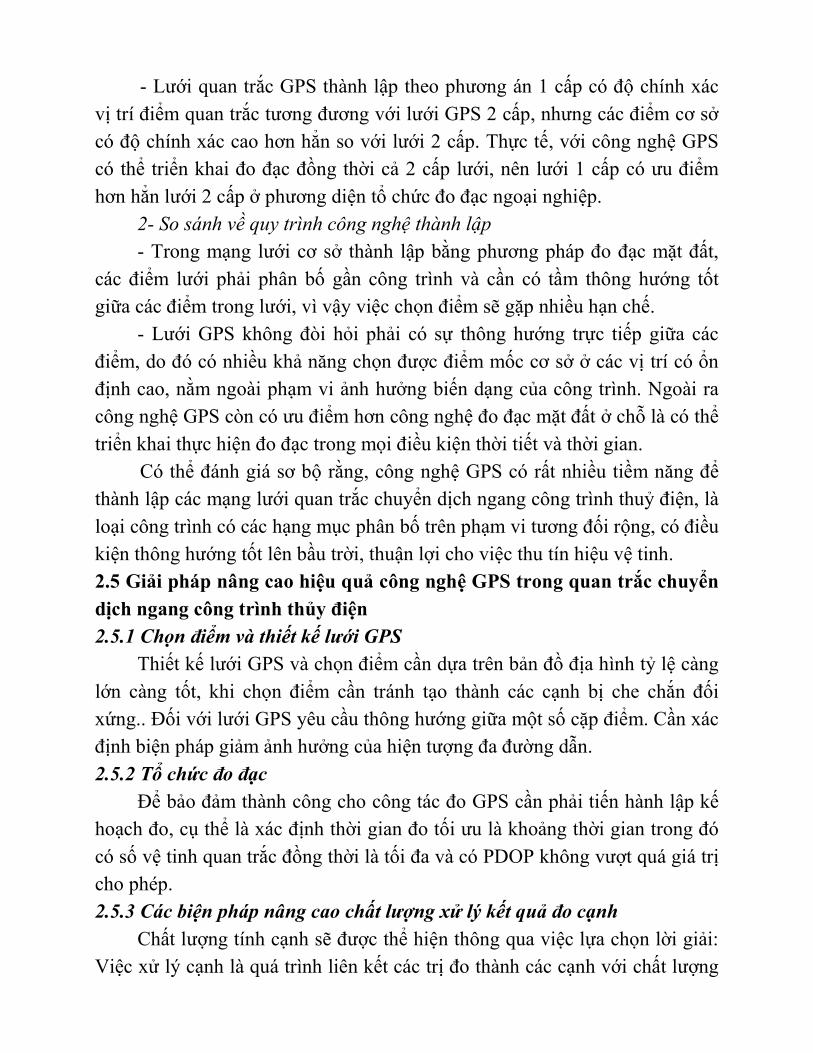
QT-02
dịch tại các điểm quan trắc và so sánh với giá trị chuyển dịch thực (bảng 2.9). Bảng 2.9: Kết quả tính chuyển dịch
Số
TT
Tên
điểm
Chuyển dịch đo bằng GPS (mm) Chuyển dịch
thực tế (mm)
Chênh lệch
(mm) qx qy q
1 KC-01 --- --- --- --- Điểm gốc
2 KC-02 -0.6 -0.6 0.8 0.0 0.8
3 KC-03 -0.6 0.5 0.8 0.0 0.8
4 QT-01 12.2 -7.1 14.1 15.0 -0.9
5 QT-02 -0.2 -0.1 0.2 0.0 0.2
6 QT-03 31.3 -5.8 32.7 30.0 2.7
Từ kết quả thực nghiệm cho phép rút ra một số đánh giá sơ bộ như sau:
- Lưới thực nghiệm được thiết kế là mạng lưới cạnh ngắn, có điều kiện
hình học tương tự với các mạng lưới quan trắc chuyển dịch ngang công trình
ở thực tế sản xuất. Sử dụng công nghệ GPS để đo đạc mạng lưới với số lượng
máy thu lớn (6 máy), kéo dài thời gian ca đo (1h30’) cho phép đạt độ chính
xác cao (sai số vị trí các điểm đều nhỏ hơn 1mm).
- Giá trị chuyển dịch của các điểm quan trắc được so với chuyển dịch
thực tế có độ lệch lớn nhất không quá 3 mm.
- Có thể thiết kế lưới một cấp khi quan trắc chuyển dịch ngang đập thủy
điện mà không cần tách thành lưới cơ sở và lưới quan trắc mà vẫn đảm bảo
độ yêu cầu độ chính xác quan trắc của các loại đập cỡ dưới 3mm.
2.7 Nhận xét về khả năng ứng dụng công nghệ GPS để thành lập lưới
quan trắc chuyển dịch ngang công trình thủy điện
Qua phân tích cơ sở lý thuyết định vị GPS, tính năng của các thiết bị
thu GPS đang được áp dụng trong thực tế sản xuất và các tính toán thiết kế
lưới quan trắc tại một số công trình đặc trưng ở Việt Nam, có thể đưa ra một
số nhận xét đánh giá như sau về khả năng ứng dụng công nghệ GPS cho công
tác xây dựng lưới quan trắc biến dạng công trình thuỷ điện:
1- Về độ chính xác thành lập lưới quan trắc: lưới được đo bằng công
nghệ GPS có thể đạt độ chính xác tương đương với lưới đo bằng các loại máy
toàn đạc độ chính xác trung bình.
2- Khi thiết kế lưới GPS cho mục đích quan trắc cần đo bổ sung cạnh
giữa các điểm quan trắc nhằm nâng cao độ chính xác của mạng lưới.
3- Sử dụng công nghệ GPS rất khó đạt được độ chính xác cao như yêu
cầu đối với mạng lưới cơ sở. Vì vậy khi ứng dụng công nghệ GPS để quan
trắc biến dạng công trình nên gộp lưới cơ sở và lưới quan trắc thành 1 cấp
lưới, đo đạc và xử lý số liệu mạng lưới này như lưới tự do với lựa chọn các
điểm định vị một cách phù hợp.
4- Ứng dụng công nghệ GPS để xây dựng lưới quan trắc biến dạng công
trình sẽ đạt được các hiệu quả sau:
- Thuận tiện chọn và bố trí điểm cơ sở ở các vị trí có độ ổn định cao.
- Có thể thực hiện quan trắc ở mọi thời điểm trong ngày, ít phụ thuộc
vào điều kiện thời tiết.
Chương 3: TÍNH TOÁN XỬ LÝ SỐ LIỆU GPS TRONG
QUAN TRẮC CHUYỂN DỊCH NGANG CÔNG TRÌNH
3.1 Ước tính độ chính xác lưới GPS
Một cách gần đúng, có thể coi các trị đo trong lưới GPS là chiều dài
và phương vị các cạnh. Việc ước tính độ chính xác được thực hiện theo
thuật toán của phương pháp bình sai gián tiếp với các bước thực hiện như
sau:
3.1.1 Chọn ẩn số
Chọn ẩn số là số hiệu chỉnh tọa độ của các điểm cần xác định, kí hiệu là
(X).
3.1.2 Lập ma trận hệ số (A) của hệ phương trình số hiệu chỉnh:
VLXA . (3.1)
Ma trận trọng số của vector các đại lượng đo: 12 KP (3.2)
- Phương trình số hiệu chỉnh đối với các loại trị đo trên có dạng:
ikiikiikkikkikik lybxaybxav (3.3)
Trong đó các hệ số aik, bik đối với các trị đo cạnh và phương vị theo thứ
tự được tính theo các công thức (3.4) và (3.5):
ik ik
ik ik
a Cos
b Sin
(3.4)
.
.
ik
ikik
ik ik
ik
Sin
Sa
b Cos
S
(3.5)
3.1.3 Lập ma trận hệ số R của hệ phương trình chuẩn:
PAAR T (3.6)
3.1.4 Tính ma trận nghịch đảo
Lưới phụ thuộc: Q = R-1
Lưới tự do: TT TTPCCPRR 10
10
~ )( (3.7)
3.1.5 Tính các chỉ tiêu sai số của mạng lưới
Sai số trung phương của hàm số sau bình sai:
FF
Pm
1. (3.9)
3.2 Tính toán bình sai lưới GPS
3.2.1 Bình sai lưới GPS trong hệ tọa độ vuông góc không gian địa tâm
Kết quả đo GPS nhận được là số gia tọa độ không gian giữa các cặp
điểm nên các trị đo tham gia bình sai sẽ là các số gia tọa độ X, Y, Z của
vector Baseline với ma trận hiệp phương sai của các trị đo MXYZ(3x3) xác
định trong quá trình giải cạnh.
Thuật toán và quy trình bình sai lưới GPS trong hệ tọa độ vuông góc
không gian được xây dựng dựa trên cơ sở của phương pháp bình sai gián tiếp.
Ngoài việc thu được kết quả là tọa độ bình sai, đánh giá độ chính xác của
mạng lưới còn xác định được ma trận trọng số đảo của mạng lưới trong hệ
tọa độ vuông góc không gian để trên cơ sở đó tính chuyển ma trận này về hệ
tọa độ phẳng, phục vụ cho việc bình sai lưới kết hợp các trị đo GPS- Mặt đất.
3.2.2 Bình sai lưới GPS quan trắc BDCT bằng phần mềm chuyên dùng
Trong luận án đã đề xuất quy trình tính toán bình sai mạng lưới khi sử
dụng phần mềm xử lý số liệu GPS do các hãng cung cấp thiết bị định vị GPS
soạn thảo với 4 bước thực hiện như sau:
Bước 1: Dựa vào các cạnh đo GPS để xác lập đồ hình mạng lưới.
Bước 2: Lựa chọn và thiết lập các thông số của Elipxoid.
Bước 3: Định nghĩa phép chiếu trong hệ tọa độ phẳng (hệ tọa độ HN-72
hoặc VN2000).
Bước 4: Bình sai lưới với 1 điểm gốc (coi lưới GPS quan trắc là lưới tự
do bậc 0). Điểm FIX tọa độ có thể được chọn là một điểm bất kỳ trong mạng
lưới, như vậy thực chất mạng lưới đã được coi là lưới tự do bậc 0 và bước
thực hiện này là quá trình “ định vị tạm thời” mạng lưới. Đối với lưới GPS
quan trắc biến dạng công trình cần phải thực hiện phân tích độ ổn định của
các điểm cơ sở và định vị lại mạng lưới, vấn đề này sẽ được trình bày trong
mục 3.3 của luận án.
3.3 Phân tích độ ổn định hệ thống móc cơ sở của lưới GPS quan trắc biến
dạng công trình
3.3.1 Tiêu chuẩn đánh giá độ ổn định mốc cơ sở
Điểm khống chế cơ sở được coi là ổn định nếu chênh lệch tọa độ của
điểm ở chu kỳ đang xét so với chu kỳ đầu không vượt quá sai số giới hạn xác
định độ chênh lệch đó.
Tiêu chuẩn nêu trên được cụ thể hóa bằng biểu thức:
.csqq t m (3.23)
Trong đó: t là hệ số xác định tiêu chuẩn sai số giới hạn, thông thường t
lấy giá trị trong khoảng từ 2 đến 3; mqcs là yêu cầu sai số xác định chuyển
dịch đối với các điểm cơ sở.
3.3.2 Phương pháp phân tích độ ổn định hệ thống mốc cơ sở
Về nguyên tắc, việc phân tích độ ổn định các điểm mốc cơ sở trong
mạng lưới quan trắc được dựa trên bài toán bình sai lưới trắc địa tự do và
được triển khai như sau:
Khi thực hiện bình sai lưới theo phương pháp gián tiếp với ẩn số cần
xác định là số hiệu chỉnh tọa độ của tất cảc các điểm trong lưới, tọa độ gần
đúng chọn bằng với tọa độ đã xác định được ở chu kỳ 1, khi đó sẽ thành lập
được hệ phương trình chuẩn:
0. bXR
Với: TPA; b A PLTR A ;
Ma trận hệ số R trong phương trình suy biến, do đó cần đưa bổ sung
một hệ phương trình điều kiện ràng buộc đối với vector ẩn số dưới dạng:
. 0TC X (3.25)
Kết hợp hai biểu thức (3.24) và (3.25) sẽ thu được hệ phương trình
chuẩn mở rộng:
(3.24)
00 0T
R C X b
C K
(3.26)
Và xác định được vector nghiệm: ~X R b (3.27)
Ma trận R~ là một dạng giả nghịch đảo của R và có thể được tính theo
công thức:
TTPCCPRR T 10
10
~ )( (3.28)
Với: 1)( BCBT T (3.29)
Biểu diễn ma trận B dưới dạng:
1 2 3 .....T
kB B B B B (3.30)
Nếu bỏ qua thành phần độ cao trong mạng lưới GPS, do trong loại lưới này
đã xác định được kích thước và phương vị nên có thể chọn các ma trận con Bi
dưới dạng:
10
01iB (3.31)
Tập hợp các phần tử của ma trận C trong công thức (3.25) sẽ cho phép
định vị mạng lưới quan trắc ở chu kỳ đang khảo sát. Vấn đề là cần chọn ma
trận C như thế nào để thỏa mãn yêu cầu của bài toán phân tích độ ổn định các
điểm mốc cơ sở. Trong luận án này sẽ thực hiện chọn ma trận C sao cho bảo
đảm điều kiện định vị mạng lưới ở chu kỳ đang khảo sát: “Điểm trọng tâm
của các điểm cơ sở ổn định ở chu kỳ đang khảo sát trùng với với điểm trọng
tâm của các điểm đó ở chu kỳ đầu (được lấy làm gốc so sánh)”.
Biểu thức (3.25) sẽ được viết dưới dạng khai triển như sau:
1,1 1 1,2 1 1,2 1 1,2
2,1 1 2,2 1 2,2 1 2,2
. . ...... . . 0
. . ...... . . 0
k k k k
k k k k
c x c y c x c y
c x c y c x c y
(3.32)
Khi thực hiện bình sai mạng lưới quan trắc ở chu kỳ đang khảo sát chọn
vector tọa độ gần đúng là vector tọa độ bình sai của chu kỳ gốc thì vector ẩn
số (X) cũng chính là vector duyển dịch của tập hợp điểm trong lưới theo các
hướng trục tọa độ. Đối chiếu công thức (3.32) với điều kiện định vị lưới đã
xác định định ở trên sẽ suy ra được cách chọn ma trận C như sau:
0
i i
i
C B
C
(3.33) - Đối với các điểm cơ sở ổn định
- Đối với các điểm khác
Giữa 2 công thức 3.32 và 3.33 có mối quan hệ ràng buộc về điều kiện
áp dụng, do đó khi tính toán cần phải được thực hiện theo phương pháp lặp
nhích dần với trình tự sau:
Bước 1: Trên cơ sở vector trị đo, lập hệ phương trình số hiệu chỉnh và
hệ phương trình chuẩn đối với vector ẩn số.
Bước 2: Giả định tất cả các điểm mốc khống chế cơ sở trong mạng lưới
là ổn định, chọn ma trận định vị khởi đầu (Ci = Bi ).
Bước 3: Giải hệ phương trình chuẩn với điều kiện C đã chọn, xác định
vector ẩn số và tính độ lệch tọa độ các điểm so với số liệu ở chu kỳ 1 (được
lấy làm mức so sánh).
Bước 4: Kiểm tra, đánh giá độ ổn định các điểm mốc cơ sở. Có thể xảy
ra một trong hai khả năng:
1- Nếu phát hiện một số điểm mốc khống chế cơ sở không ổn định thì sẽ
loại một điểm có độ chuyển dịch lớn nhất (giả định là điểm i) ra khỏi tập hợp
điểm khống chế bằng cách gán Ci = 0 và quay lại thực hiện từ bước 3.
2- Nếu các điểm mốc khống chế cơ sở còn lại đều ổn định thì việc kiểm
tra được dừng lại và thực hiện định vị lưới theo các điểm khống chế đó.
3.3.3 Phân tích độ ổn định mốc cơ sở trong mạng lưới GPS quan trắc
chuyển dịch ngang công trình
Trong chu kỳ đang khảo sát, sau khi đã thực hiện bình sai lưới GPS
quan trắc ở chế độ FIX tọa độ 1 điểm như đã nêu trong mục 2.2 thì còn cần
phải kiểm tra độ ổn định của các điểm cơ sở và định vị lại mạng lưới đó.
Bước đầu giả định tất cả các điểm cơ sở đều ổn định và thực hiện định vị lưới
sao cho trọng tâm của các điểm cơ sở trùng với trọng tâm của các điểm đó ở
chu kỳ 1 (thực hiện bằng cách chọn C = B đối với các điểm cơ sở và C = 0
đối với các điểm khác). Bước tiếp theo thực hiện kiểm tra độ ổn định các
điểm cơ sở, nếu phát hiện có điểm không ổn định thì sẽ định vị lại mạng lưới
theo nguyên tắc đã đề ra ở mục 3.3.2. Quá trình định vị lại mạng lưới có thể
được thực hiện thông qua việc áp dụng công thức chuyển đổi tọa độ sau: (2) (1) 1( )T TX X B C B C X (3.34)
Trong công thức 3.34: δX là vector chuyển dịch của các điểm cơ sở
trong chu kỳ khảo sát so với chu kỳ 1; X(1) là vector tọa độ bình sai lưới ở chu kỳ đang xét ứng với chế độ FIX 1 điểm gốc và X(2) là vector tọa độ bình

sai của lưới đó ứng với ma trận định vị C.
Trên cơ sở công thức 3.44 và cách xác định ma trận C trong mỗi lần
định vị lưới thu được biểu thức tính chuyển tọa độ bình sai giữa các phương án chọn điều kiện định vị khác nhau như sau:
1- Tính chuyển tọa độ của các điểm trong lưới (gồm n điểm cơ sở) từ
chế độ FIX 1 điểm gốc về lưới tự do với BC :
n
yy
n
xxx
i
ii
)1((2)i
)1()2(
y
(3.35)
2- Khi cần bớt đi 1 điểm định vị (ký hiệu là điểm t) trong tập hợp k
điểm định vị thì tọa độ các điểm trong lưới sẽ được tính theo công thức:
(2) (1)
(2) (1)
1
1
t
t
xx x
k
yy y
k
(3.36)
Trong luận án đề xuất một quy trình phân tích độ ổn định mốc cơ sở của
mạng lưới GPS quan trắc chuyển dịch ngang công trình theo phương pháp
lặp nhích dần như sau:
Bước 1: Trong chu kỳ đang khảo sát, thực hiện bình sai lưới GPS quan
trắc như mạng lưới tự do với 1 điểm FIX tọa độ (định vị tạm thời).
Bước 2: Tính độ lệch tọa độ của tất cảc các điểm cơ sở so với tọa độ các
điểm đó ở chu kỳ đầu và tính chuyển tọa độ sau bình sai của các điểm trong
mạng lưới về hệ tọa độ mới với điều kiện định vị Ccs = B (công thức 3.35).
Bước 3: Tính lại độ lệch tọa độ của các điểm cơ sở và áp dụng tiêu
chuẩn (3.23) để kiểm tra, đánh giá độ ổn định của các điểm cơ sở trong lưới.
Bước 4: Kiểm tra, đánh giá độ ổn định các điểm mốc cơ sở (có C=B)
trong lưới. Có thể xảy ra một trong hai khả năng:
- Nếu phát hiện một (hoặc một số) điểm không ổn định thì sẽ loại một
điểm có độ lệch tọa độ lớn nhất ra khỏi nhóm điểm ổn định bằng cách gán
cho điểm đó giá trị C = 0 và tính chuyển tọa độ theo công thức (3.36).
- Nếu các điểm còn lại (có giá trị C = B) đều thoả mãn tiêu chuẩn (3.23)
thì kết thúc quá trình kiểm tra. Việc định vị lưới được tự động thực hiện gần
đúng nhất so với các điểm ổn định.
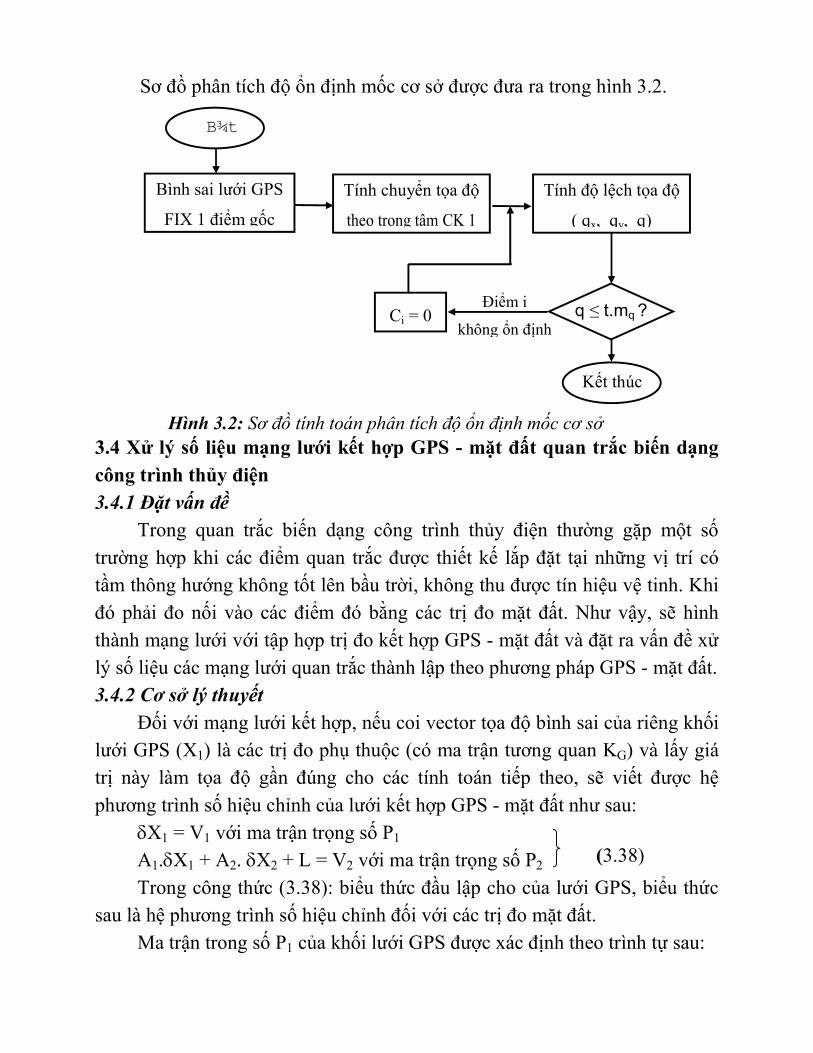
Sơ đồ phân tích độ ổn định mốc cơ sở được đưa ra trong hình 3.2.
3.4 Xử lý số liệu mạng lưới kết hợp GPS - mặt đất quan trắc biến dạng
công trình thủy điện
3.4.1 Đặt vấn đề
Trong quan trắc biến dạng công trình thủy điện thường gặp một số
trường hợp khi các điểm quan trắc được thiết kế lắp đặt tại những vị trí có
tầm thông hướng không tốt lên bầu trời, không thu được tín hiệu vệ tinh. Khi
đó phải đo nối vào các điểm đó bằng các trị đo mặt đất. Như vậy, sẽ hình
thành mạng lưới với tập hợp trị đo kết hợp GPS - mặt đất và đặt ra vấn đề xử
lý số liệu các mạng lưới quan trắc thành lập theo phương pháp GPS - mặt đất.
3.4.2 Cơ sở lý thuyết
Đối với mạng lưới kết hợp, nếu coi vector tọa độ bình sai của riêng khối
lưới GPS (X1) là các trị đo phụ thuộc (có ma trận tương quan KG) và lấy giá
trị này làm tọa độ gần đúng cho các tính toán tiếp theo, sẽ viết được hệ
phương trình số hiệu chỉnh của lưới kết hợp GPS - mặt đất như sau:
X1 = V1 với ma trận trọng số P1
A1.X1 + A2. X2 + L = V2 với ma trận trọng số P2
Trong công thức (3.38): biểu thức đầu lập cho của lưới GPS, biểu thức
sau là hệ phương trình số hiệu chỉnh đối với các trị đo mặt đất.
Ma trận trong số P1 của khối lưới GPS được xác định theo trình tự sau:
(3.38)
B¾t
Bình sai lưới GPS
FIX 1 điểm gốc
Tính chuyển tọa độ
theo trọng tâm CK 1
Tính độ lệch tọa độ
( qx, qy, q)
q ≤ t.mq ?
Kết thúc
Ci = 0 Điểm i
không ổn định
Hình 3.2: Sơ đồ tính toán phân tích độ ổn định mốc cơ sở

- Tính ma trận nghịch đảo (QGkg) của khối lưới này trong hệ tọa độ
vuông góc không gian (đã trình bày trong mục 3.2).
- Tính chuyển ma trận nghịch đảo của khối lưới GPS từ hệ tọa độ vuông
góc không gian về ma trận nghịch dảo trong hệ tọa độ phẳng: T
GkgW.Q .WGmpQ (3.39)
Trong đó: W là ma trận chuyển đổi từ tọa độ không gian về tọa độ phẳng,
được tập hợp từ các ma trận xoay w, xác định xác định cho từng điểm lưới:
0 0 0 0 0
0 0 0 0 0
0 0
sin cos sin cos osL
w = sin sin cos osB sinL
cos 0 sin
B L L B c
B L L c
B B
(3.40)
Tính ma trận trọng số (P1) của vector tọa độ khối lưới GPS: 1
1 GmpP Q (3.41)
Từ đó xác định được hệ phương trình chuẩn:
1 1 2 1 1 2 2 1 1 2
22 2 1 2 2 2 2 2
0T T T
T T T
P A P A A P A X A P L
XA P A A P A A P L
(3.44)
Hệ phương trình chuẩn (3.44) là cơ sở để triển khai tính toán xử lý số
liệu lưới kết hợp GPS- Mặt đất. Trong trường hợp này, ứng dụng phương
pháp bình sai truy hồi là thích hợp hơn cả bởi vì cho phép bắt đầu tính toán
ngay từ ma trận QG của lưới GPS mà không cần tính đến vector trị đo GPS.
Đối với lưới kết hợp GPS- Mặt đất, ma trận Q0 có hạt nhân QG là ma
trận trọng số đảo của vector tọa độ lưới GPS, vì vậy có thể viết ma trận Q0
dưới dạng khối như sau:
0 2
2
0; 10 .
0Gmd m
QQ Q E
Q
(3.45)
Áp dụng công thức truy hồi tính ma trận nghịch đảo và số hạng tự do
của hệ phương trình chuẩn để kết nối các trị đo mặt đất:
(3.46)
Tính nghiệm, tọa độ bình sai và các đại lượng cần thiết cho việc đánh
giá độ chính xác các yếu tố trong lưới.
- Nghiệm và tọa độ bình sai:
1 11
1
( ) ( 1)
1
; ( 1 )
Ti i i i
i iT
i i i
i
i ij j i ij i
Q a a QQ Q
a Q ap
b b p a l j K
0. ;X Q b X X X (3.47)
- Đánh giá độ chính xác:
1 1 1 2 2 2
D
;3 -K
T T
F F
GPS M
V PV V PVm Q
N N
(3.48)
3.4.3 Quy trình tính toán
1- Xử lý số liệu lưới GPS bằng phần mềm (GPSurvey hoặc TBC...), sử
dụng modul WAVE để xác định cạnh và ma trận tương quan trị đo tương
ứng, sử dụng modul Trimnet để bình sai, tính tọa độ các điểm trong lưới.
2- Tính ma trận nghịch đảo của lưới GPS trong hệ tọa độ vuông góc
không gian.
3- Tính chuyển ma trận nghịch đảo lưới GPS từ hệ tọa độ vuông góc
không gian về hệ tọa độ phẳng. Xác định ma trận Q0 của khối lưới GPS và
khối lưới mặt đất.
4- Dựa vào vector trị đo của khối lưới mặt đất, tính ma trận nghịch đảo
và số hạng tự do của mạng lưới kết hợp theo công thức truy hồi.
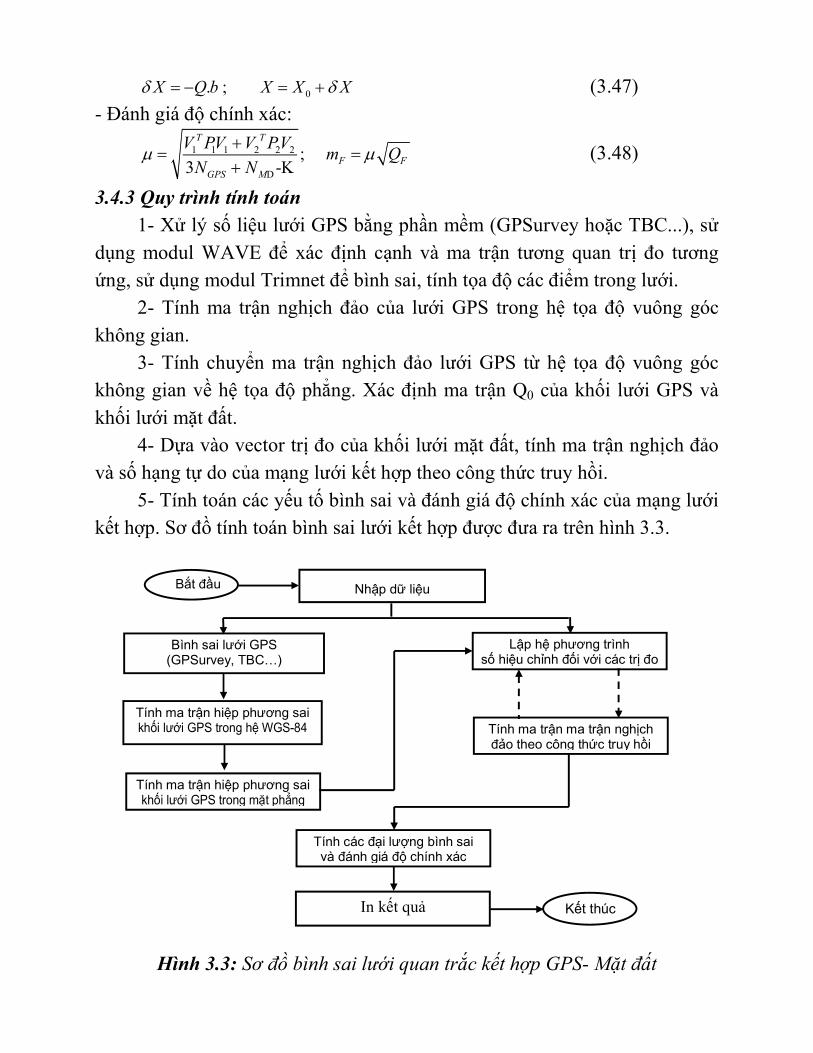
5- Tính toán các yếu tố bình sai và đánh giá độ chính xác của mạng lưới
kết hợp. Sơ đồ tính toán bình sai lưới kết hợp được đưa ra trên hình 3.3.
Hình 3.3: Sơ đồ bình sai lưới quan trắc kết hợp GPS- Mặt đất
Nhập dữ liệu Bắt đầu
Bình sai lưới GPS (GPSurvey, TBC…)
Tính ma trận hiệp phương sai khối lưới GPS trong hệ WGS-84
Tính ma trận hiệp phương sai khối lưới GPS trong mặt phẳng
Lập hệ phương trình số hiệu chỉnh đối với các trị đo
Tính ma trận ma trận nghịch đảo theo công thức truy hồi
Tính các đại lượng bình sai và đánh giá độ chính xác
In kết quả Kết thúc
3.4.4 Ví dụ xử lý số liệu lưới kết hợp GPS - mặt đất
Trong luận án đã thực hiện tính toán thử nghiệm đối với mạng lưới quan
trắc tại công trình thuỷ điện Yaly. Đây là mạng lưới được thành lập từ các trị
đo GPS và đo cạnh bằng máy toàn đạc điện tử. Trình tự tính toán và kết quả
thử nghiệm đối với mạng lưới kết hợp nêu trên đã minh chứng rõ hơn cho
thuật toán và quy trình bình sai lưới kết hợp GPS - mặt đất. Qua đó cho thấy
việc ứng dụng mô hình bình sai kết hợp được đề xuất hoàn toàn đáp ứng
nhiệm vụ xử lý số liệu các mạng lưới quan trắc biến dạng công trình thành
lập theo phương pháp kết hợp các trị đo mặt đất và GPS.
Chương 4: THỰC NGHIỆM THIẾT KẾ VÀ XỬ LÝ SỐ LIỆU LƯỚI
GPS QUAN TRẮC BIẾN DẠNG ĐẬP THUỶ ĐIỆN TUYÊN QUANG
4.1 Giới thiệu công trình thực nghiệm
4.1.1 Khái quát chung về công trình
Đối tượng thực nghiệm để triển khai quan trắc chuyển dịch ngang bằng
công nghệ GPS là tuyến đập của nhà máy thủy điện Tuyên Quang. Trong các
chu kỳ đo thực nghiệm cũng đã đồng thời tiến hành quan trắc bằng công nghệ
đo đạc mặt đất, do đó có điều kiện kiểm chứng và so sánh kết quả xác định
chuyển dịch theo cả hai công nghệ nêu trên.
4.1.2 Nhiệm vụ kỹ thuật của công tác quan trắc
Số lượng mốc quan trắc: tại đập bê tông bản mặt bố trí 24 điểm mốc
trên 4 tuyến cơ, mỗi tuyến có 6 điểm mốc, đặt tại 6 mặt cắt. Trên hình 4.2
thể hiện vị trí đặt mốc trên đỉnh và các cơ đập, các điểm mốc được ký
hiệu từ MM-1 đến MM-24. Tại mỗi khối trên đập bê tông trọng lực đặt 2
điểm mốc quan trắc.
(Khi thực nghiệm lập lưới quan trắc bằng công nghệ GPS chỉ tiến
hành đo mạng lưới với 4 điểm cơ sở và 814 điểm quan trắc).
Yêu cầu độ chính xác quan trắc: Do yêu cầu quan trắc các hạng mục
công trình có kết cấu bê tông bản mặt và bê tông trọng lực nên yêu cầu độ
chính xác đối với các điểm quan trắc được đặt ra rất cao. Sai số chuyển
dịch ngang tại các điểm quan trắc trên tuyến đập bê tông trọng lực không
vượt quá ±5mm, còn sai số chuyển dịch tại đập bê tông bản mặt không
vượt quá ±10mm.

4.2 Thiết kế hệ thống lưới quan trắc
4.2.1 Thiết kế sơ đồ lưới
Trong mạng lưới quan trắc thực nghiệm có 4 điểm mốc cơ sở
(QT-01, QT-03, QT-05, QT-06) và 814 điểm quan trắc gắn trên thân
đập. Cả 2 loại mốc nêu trên đều có kết cấu định tâm bắt buộc, thuận lợi
đặt thiết bị quan trắc.
Hình 4.4: Sơ đồ lưới quan trắc thực nghiệm Thuỷ điện Tuyên Quang
4.2.2 Tổ chức đo đạc ngoại nghiệp
Máy móc và thiết bị đo bao gồm: 8 máy thu tín hiệu vệ tinh loại
4600LS do hãng Trimble Navigation của Mỹ sản xuất. Độ chính xác theo lý
lịch máy 5mm + 1ppm.
a. Quan trắc chu kỳ 1:Trong chu kỳ 1 (thực hiện trong tháng 1 năm 2008) đã
triển khai quan trắc thực nghiệm với 2 nội dung: Đo lưới khống chế cơ sở
gồm 4 điểm (QT-01, QT-03, QT-05, QT-06) với 4 ca đo. Đo lưới quan trắc
với 14 điểm, thời gian đo mỗi ca đo kéo dài 1 giờ 30 phút.
b. Quan trắc chu kỳ 2:Trong chu kỳ 2 (thực hiện trong tháng 3 năm 2009) đã
triển khai quan trắc thực nghiệm với 2 nội dung giống như chu kỳ 1: Đo lưới
khống chế cơ sở gồm 4 điểm với 4 ca đo. Đo lưới quan trắc với 8 điểm, thời
gian đo mỗi ca đo kéo dài 1 giờ 30 phút.
QT-06
QT-05
QT-01
QT-03
MM15
MM22
MM-16 MM-14
MM-21 MM-20
MM-28
MM35
4.2.3 Kết quả đo và xử lý số liệu lưới thực nghiệm
Xử lý số liệu đo lưới quan trắc chuyển dịch ngang tuyến đập thuỷ điện
Tuyên Quang được thực hiện trong hai chu kỳ 1 và 2 được thực hiện bằng
phần mềm GPSurvey 2.35. Phương án bình sai lựa chọn là bình sai lưới tự do
với 1 điểm gốc là điểm QT- 06 (tọa độ giả định). Các chỉ tiêu độ chính xác đo
đạc và tính toán bình sai đối với mạng lưới quan trắc trong 2 chu kỳ thực
nghiệm đều đạt yêu cầu kỹ thuật.
4.3 Thực nghiệm phân tích độ ổn định lưới GPS cơ sở quan trắc đập
thủy điện Tuyên Quang
4.3.1 Phân tích độ ổn định mốc cơ sở (chu kỳ 2 so với chu kỳ 1)
Việc phân tích độ ổn định mốc lưới cơ sở được thực hiện theo quy trình
nêu trong mục 3.3.3, cho phép đồng thời phân tích độ ổn định các điểm mốc
và định vị mạng lưới theo số liệu tọa độ các điểm mốc ở chu kỳ 1. Quá trình
xử lý được thực hiện theo quy trình lặp. Kết quả phát hiện trong mạng lưới có
1 điểm cơ sở không ổn định (điểm QT-03).
4.3.2 Tính toán chuyển dịch
Dựa trên kết quả đo đạc mạng lưới quan trắc chuyển dịch ngang trong
các chu kỳ, giá trị chuyển dịch của đối tượng quan trắc được tính toán theo
các công thức:
- Chuyển dịch theo hướng trục OX:
2 1xq x x (4.1)
- Chuyển dịch theo hướng trục OY:
2 1yq y y (4.2)
- Chuyển dịch toàn phần:
2 2
x yq q q (4.3)
Trên cơ sở số liệu chuyển dịch xác định được theo công nghệ GPS và
công nghệ đo mặt đất đã tính được độ chênh lệch giữa các giá trị chuyển dịch
xác định theo 2 công nghệ nêu trên (kết quả so sánh được đưa ra trong bảng
4.8), từ đó rút ra được những đánh giá bước đầu về khả năng độ chính xác
của công nghệ GPS trong thành lập lưới quan trắc chuyển dịch ngang công
trình thủy điện.

Bảng 4.8: So sánh kết quả tính chuyển dịch theo công nghệ GPS và đo mặt đất
Số
TT
Tên
điểm
Phương
Pháp đo
Chuyển dịch q và độ lệch q (mm)
Theo trục OX Theo trục OY Toàn phần
qx qx qy qy q q
1 MM-14 GPS -10.0 -2.2 -1.0 -0.6 10.0 2.2
MĐ -7.8 -0.4 7.8
2 MM-16 GPS -6.0 -1.0 -4.0 2.4 7.2 -0.9
MĐ -5.0 -6.4 8.1
3 MM-20 GPS -7.0 -1.8 0.0 -1.1 7.0 1.7
MĐ -5.2 1.1 5.3
4 MM-21 GPS 4.0 1.4 3.0 1.4 5.0 1.9
MĐ 2.6 1.6 3.1
5 MM-22 GPS 1.0 -0.7 3.0 0.7 3.2 0.3
MĐ 1.7 2.3 2.9
6 MM-28 GPS 2.0 0.1 7.0 -0.1 7.3 0.0
MĐ 1.9 7.1 7.3
7 MM-35 GPS -1.0 -0.4 4.0 0.9 4.1 0.9
MĐ -0.6 3.1 3.2
4.3.3 Nhận xét đánh giá kết quả thực nghiệm
Trên cơ sở kết quả thực nghiệm thành lập và xử lý số liệu lưới cơ sở tại
thuỷ điện Tuyên Quang trong 2 chu kỳ quan trắc có thể sơ bộ rút ra một số
đánh giá như sau:
- Kết quả tính toán tọa độ lưới GPS trong quan trắc cho thấy sai số vị trí
mặt bằng có thể đạt cỡ 3mm. Giá trị chuyển dịch của các điểm quan trắc đo
bằng công nghệ GPS so sánh với kết quả đo mặt đất tại công trình thực
nghiệm có độ lệch lớn nhất không vượt quá ±3mm. Như vậy, công nghệ GPS
có thể được ứng dụng để quan trắc chuyển dịch của các công trình thủy điện
với yêu cầu độ chính xác trung bình như đập đất đá, đập bê tông bản mặt.
- Kết quả thực nghiệm đã minh chứng cho tính đúng đắn của thuật toán
và quy trình phân tích độ ổn định các điểm mốc cơ sở trong mạng lưới thành
lập bằng công nghệ GPS được đưa ra trong mục 3.3 của luận án này.
- Quy trình tính toán xử lý số liệu đề xuất trong luận án có thể dễ dàng
tự động hoá thông qua việc lập trình tính toán trên máy tính.

KẾT LUẬN
Từ những nghiên cứu, khảo sát lý thuyết và ứng dụng thực tiễn của
công nghệ GPS trong quan trắc chuyển dịch ngang công trình thủy điện,
chúng tôi rút ra một số kết luận như sau:
1. Công nghệ GPS có thể ứng dụng để xây dựng các mạng lưới khống
chế trắc địa mặt bằng có độ chính xác cao. Vì vậy, nghiên cứu ứng dụng công
nghệ này trong công tác quan trắc chuyển dịch ngang công trình thủy điện là
cần thiết, giúp đạt được hiệu quả cả về kinh tế và kỹ thuật.
2. Trên cơ sở phân tích đặc điểm thành lập lưới quan trắc biến dạng
công trình, trong luận án đã đề xuất và minh chứng tính ưu việt của mạng
lưới GPS một cấp quan trắc chuyển dịch ngang công trình. Đề ra các biện
pháp bảo đảm độ chính xác của việc định vị trong quá trình thi công lưới.
3. Về công tác tính toán xử lý số liệu, trong luận án đã xây dựng thuật
toán, quy trình hợp lý để thực hiện công đoạn phân tích độ ổn định hệ thống
điểm mốc GPS cơ sở và bình sai kết hợp các trị đo GPS với trị đo mặt đất.
4. Tác giả luận án đã thử nghiệm ứng dụng công nghệ GPS để quan trắc
biến dạng tuyến đập nhà máy thủy điện Tuyên Quang với 2 chu kỳ. Kết quả
đo đạc và xử lý số liệu mạng lưới quan trắc thử nghiệm đã minh chứng cho
tính đúng đắn của các giải pháp kỹ thuật và thuật toán được đề xuất trong
luận án, đồng thời chứng tỏ khả năng ứng dụng và tính hiệu quả của công
nghệ GPS đối với công tác quan trắc biến dạng công trình thủy điện.
KIẾN NGHỊ
1. Trong Luận án mới chỉ thực nghiệm quan trắc chuyển dịch ngang tuyến
đập thủy điện bằng phương thức quan trắc theo chu kỳ. Trong thời gian tới, cần
tiếp tục nghiên cứu ứng dụng công nghệ GPS quan trắc biến dạng theo hướng
liên tục để có thể theo dõi sự vận động của công trình, nhất là đối với những
công trình đặc biệt nhạy cảm với các nguyên nhân gây biến dạng.
2. Trong Luận án cũng mới chỉ đề cập đến việc ứng dụng công nghệ GPS
để quan trắc chuyển dịch ngang công trình thủy điện. Để phát huy tối đa hiệu
quả của công nghệ GPS, cần tiếp tục nghiên cứu ứng dụng công nghệ này để
nâng cao hiệu quả quan trắc dịch chuyển công trình thủy điện theo chiều thẳng
đứng.