nonlinear vibrations of a beam under harmonic excitation
TRANSCRIPT

W. Y. TSENG Research Assistant.
J. DUGUNDJI Associate Professor.
Department of Aeronautics and Astronautics, Massachusetts Institute of Technology,
Cambridge, Mass.
Nonlinear fibratiois i f a Beam Under Harmonic Excitation1
.1 straight beam with fixed ends, excited by the periodic motion of its supporting base in a direction normal to the beam span, was investigated analytically and experimentally. By using Galerkin's method (one mode approximation) the governing partial differential equation reduces to the well-known Duffing equation. The harmonic balance method is applied to solve the Duffing equation. Besides the solution of simple harmonic motion (SUM), many other branch solutions, involving superharmonic motion (SPHM) and subharmonic motion (SBTIM), are found experimentally and analytically. The stability problem is analyzed, by solving a corresponding variational Hill-type equation. The results of the present analysis agree well with the experiments.
Introduction NOTE : GRAVITATION FORCE X PAPER
T* I HE DYNAMIC conditions of a straight beam with fixed ends, excited by the periodic motion of its supporting base, are considered here. Using the first vibration mode approximation, the governing equation of motion becomes the well-known Duffing equation. This equation has been recently investigated again by several authors [1-5].2 However, there is little experimental work considered from elastic structural models (most of them used analog computer approach). I t is known that the solution of simple harmonic motion (SHM), in which the predominant component has a period the same as the external force, is unstable at some specific regions. Near these regions, there exist other equilibrium solutions in which SHM component becomes minor and a component with a period other than that of the external force becomes predominant. The responses other than that of SHM will be named as SPHM (superharmonic motion) or SBIIM (subharmonic motion). The present paper attempts to point out several features of these SPHM and SBIIM
1 This work was supported by the Air Force Office of Scientific Research under Contract AF 49(638)-1528, and is part of a PhD thesis to be completed by the first author.
1 Numbers in brackets designate References at end of paper. Contributed by the Applied Mechanics Division for presentation
at the Winter Annual Meeting and Energy Systems Exposition, New York, N. Y., November 29-December 3, 1970, of T H E AMERICAN SOCIETY OF M E C H A N I C A L E N G I N E E H S .
Discussion of this paper should be addressed to the Editorial Department, ASME, United Engineering Center, 345 East 47th Street, New York, N. Y. 10017, and will be accepted until Jul}' 20, 1970. Discussion received after the closing date will be returned. Manuscript received by ASME Applied Mechanics Division, February 18, 1969; final revision, August to, 1969. Paper No. 70-WA/APM-13.
-r7T7-r7~rrrr7T7-r
Fig. 1 Geometry of system
motions which may not have been generally apparent before. Both analytical and experimental work are considered here.
Formulation and General Solution The governing differential equation of a beam with fixed ends
excited by base motion WB is (see Fig. 1)
dx* da: \ dx -m 1-
1 df- dp
d)V
dt
Ar, iVo + EA rl
* ~ J o 1 /db_
dx dx
(1)
(2)
BC's w = = o di
al x = 0 and /
where E = Young's modulus; / = bh3/\.2 = moment of inertia; b = width of beam; h = thickness of beam; Aro = initial tension on the beam; m = mass/unit length; C = damping coefficient; I = time in second; IT = deflection of beam; I = length of beam; x = longitudinal axis; A — cross section of beam.
292 / JUNE 1970 Transactions of the ASME Copyright © 1970 by ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms

For the present frequency of interest, the solution of (1) may he written as
5„, = Kroneeker delta
»'(*, 0 = 3i(O0i(aO (3) A0 = »2a: 1 + A i/o2 + - (rr + r-r + nr)
where cf>i i-s tlie m''sf f>'ee vibration mode of a clamped-clamped beam, and has the value of 1.588 at x = 1/2; «i is the first generalized coordinate.
Applying Galerkin's method and assuming hannonic excitation of the base, \VB — A p„ sin uFt, will lead to the equation,
it-it , do -- + -2(,coi — + un\ + Ku/hf = 0.8308a,MF sin <aFt (4)
ill- dt
where An — forcing amplitude; wF = forcing frequency; q = l(/, • /< j - rwoM); / t j , = (/!«//(.)• (coo/wi); co0
2 = oQQ-(jE//(ml4); co," - coo2 + 12.31iVo/(»(I2); A = 1.652; and f = (7/(2Wlm) = critical damping ratio.
Equation (4) is the well-known Duffing equation with an acceleration-type forcing function. In here, cop represents the furring frequency, and Wi the linear natural frequency of the beam. For calculation purposes, it is convenient to introduce the nondimensional t imer such that
nr = o>h-t (5)
and then, (4) reduces to the nondimensional form,
('/ + 2nj"VMJ + ri'-aq 4- n-Kaqi — 0.8308nM.,,- sin n r (6)
where n = any integer; a = (a^/co,,)2 = I/O2; and ( ' ) = d/dr. For the basic equation (6), the general steady-state periodic
solmion of HUM, SPHM (order 3, 2, 3 / 2 ) , and SBHM (order 2/.<, ' '., x '.; I can be written in the form
A i = (ji2a — 1) + /!2Aa(4i/o2 + n 2 + 2ns2 + 2r32) 4
Ai = (n2a - 4) + - n2A'a(4y,,2 + 2r,2 + /V2 + 2r„2)
4 3 = (ri!a - 9) 4- - n'KaiAui- + 2r,2 + 2r22 + ?V2)
4
/-,-- = x,2 + yr, i = 1,2, 3
Iu the case f = 0, all y components are zero, r,- = xi and only equations (86), (8rf), and (8/) apply.
Equation (8) is the general steady-state periodic solution. I t will now be applied to some specific cases.
Specific Cases SHM and SPHM Order 3. From (6) and (8) with n = 1, it is
readily seen that j/o = x2 = u2 = 0 satisfies (8a), (8d), (8e), leaving only (86), (8c), (8/), and (8g) to be solved. Eliminating x and y components in the foregoing equations gives
3/l;i'r32\ ,
A, — ) + 4.pa M + 9 - n2 = (0.8308/b-)2
A2«2
AW + 36f 2ar32 = -—- rr
ID
(9a)
(96)
'i = no + Yl fesm kT + y>=<;os ltT> ( ' ) A- = 1
iSulMituting (7) into (0) and equating the coefficients of the terms couraiuing constant, sin r, cos r, sin 2r, cos 2r, s in3r , and cos 'AT separately to zero yields (this method is named harmonic balance),
A„:i„ 4- -n'2Ka {1/2(1/1- - xr) + 2x,!/ix-.
+ 2[;/3((/1;/2 - Xix-,) + x:i(i/ix-i + xiyi)]\ = 0 (8a)
A,x, • 2 n | V a i / , + oH2/\"aj(/0((/i.r, - .r,.i/2 + 1)2X3 - x2y3)
+ ilxa(xr — })r ~~ xr + ilr) + 'Mh(xiii-i ~~ x\Vi)\\
= 0.8308«Uf5„! (86)
-" . fVMi + 4,1/1 + 3)i!itaJ!/)(i,.ri + ;/i/y2 + .c2x3 + VHh)
1 -WlhAy/1 ^ :«'r - .r,2 + y,2) + 2x3(Xlyi + xn/2)}} = 0 (8c)
-\-x: - 4?tfVa.i/-. + 3'«2/vaji/o(.ci.i/i - .n(/3 4- xnji)
-4 '.[<.<'r-r-. + ?/i.i/2).T3 + Car.i/™ - :r2y,)(/3l} = ().8308nM;„5„2 (8(()
4;/,C'\ '«i2 + /U.i/3 + ;k!;(a}!/,[;f,:r, + ?;,;;/;, 4- '-(^2 _ Xl2)]
+ -|-[!/3(a'i:r2 + //if/a) + 3̂(1/1X2 - X1IJ2)]} = 0 (8e)
4...'-., - I k f V a i / ] + 3?i2/fa I y0(:ri,v2 + m/i) + i ( r f - l/22)x,
+ 2i/i:r2i/2 + x,;/,2 = 0.83()8w2Af5Jl3 (8/)
<i"i" V 0x3 + 4̂:ty/3 + 3n2A'a i ?/o(.ViJ/2 — Xixi)
l/i (t/22 — x2
2) 4- 2x,.c2i/2 — ?/iX,2 + = 0 (Sg)
Tliere exists two equililnium solutions iu (9), one of them is jrij » |r3|, the other is | n | « |»-;)|.
For the |?'i| » jr3| case, further simplification is obtained by neglecting x3 and y3 components and discarding the associated equation (96) which reduces to the standard solution of SHM as
[(a - t + fA'ar,2)2 + 4f2a]r,2 = (0.8308.4r)2 (10)
This gives the conventional cubic equation in ri2. Numerical results of (10) for n are shown in Fig. 2. For more accurate solutions involving small but nonzero n, solutions of (9a), (96) can be obtained by iterating from the n = 0 solution given by (10). Numerical results for r, and n are also shown in Fig. 2. The n results are indistinguishable from those given previously by (10) alone. For the |r3| » li-i| case, the solution is somewhat difficult to realize directly from (9a), (96); however, it can readily be seen in the case of f = 0 which gives
4, 343/3
2
rr
A,r3
n = 0.8308.4 F
Kct ,.[3
Equation (116) can be rewritten as
ZKct 9 + _ ^ _ _ ,.32
Ka
4
(Ha)
(116)
(12)
By the assumption \n\ 3> |;'i|, (12) can be approximated as
4(9 - a)
3Ka or
,45 « 0
Equation (11a) then reduces simply to
2r,2
win
9 17 - a - - Kan2 ) n = 0.8308AF
(13a)
(136)
Journal of Applied Mechanics JUNE 1 9 7 0 / 2 9 3
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms
A F » . 2 5 (For SPHM 3 /2 only, » AF».20)
( a , «, A corresponds to forcing frequency}
- <****•
SHM
SPHM 3 o •
SPHM 2 o •
SPHM 3 /2 A A
FREOUENCY- il
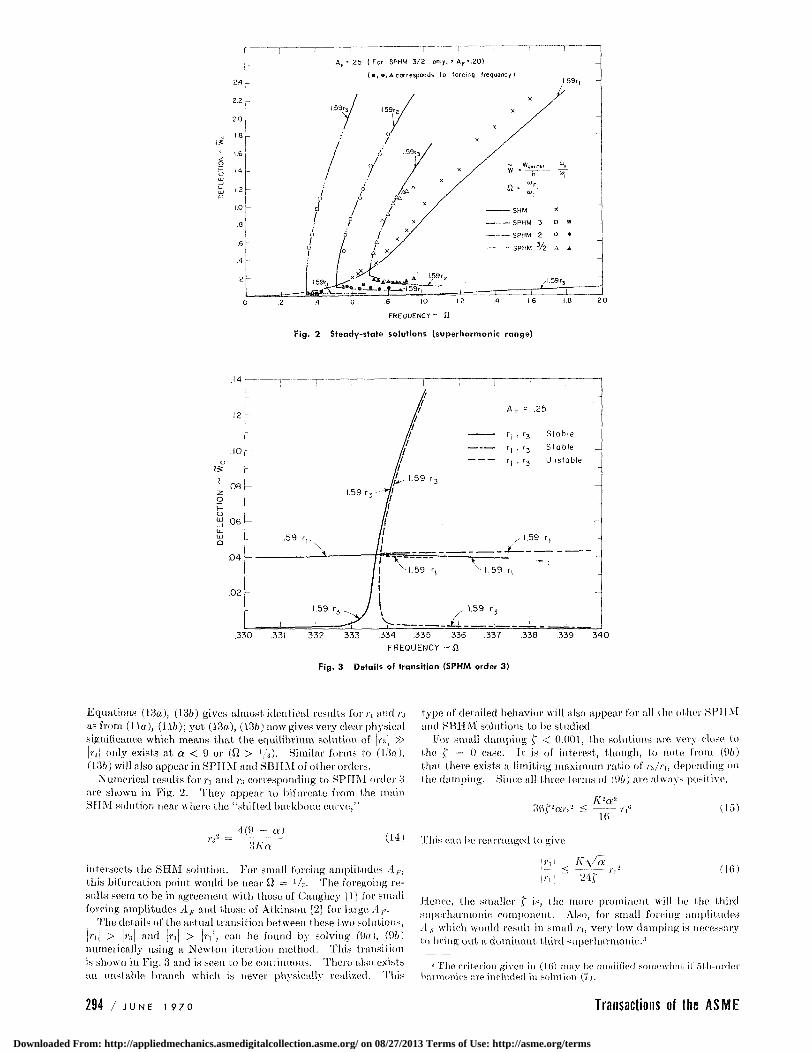
Fig. 2 Steady-state solutions (superharmonic range)
<5
.08
.06
.04
.02
.330
1.59
1.59 r.
.59 r.
-1.59 r,
- • X L . L
Stobl.
1.59 r,
.331 .337 .332 .333
Fig. 3 Details of transition (SPHM order 3)
.334 .335 .336
FREOUENCY - f t
338 .339 .340
Equations (13a), (136) gives almost identical results for ri and n as from (11a), (116); yet (13a), (136) now gives very clear physical significance which means that the equilibrium solution of \n\ » |nj only exists at a < 9 or (0 > l / 3 ) . Similar forms to (13(7), (136) will also appear in SPHM and SB.HM of other orders.
Numerical results for n and r3 corresponding to SPHM order 3 are shown in Fig. 2. They appear to bifurcate from the main SHM solution near where the "shifted backbone curve,"
4(9_ r j ;v)
3A'a
intersects the SHM solution. For small forcing amplitudes AF, this bifurcation point would be near 0 = 1/3. The foregoing results seem to be in agreement with those of Caughey |.l] for small forcing amplitudes AF and those of Atkinson [2] for large Ay.
The details of the actual transition between these two solutions, |n | > j?'3| and \r3\ > |n | , can bo found by solving (9«), (96) numerically using a Newton iteration method. This transition is shown in Fig. 3 and is seen to be continuous. There also exists an unstable branch which is never physically realized. This
type of detailed beliavior will also appear for all the other SI 'IIM and SBHM solutions to be studied.
For small damping f < 0.001, the solutions are, very close to the f = 0 case. If is of interest, though, to note from (96) that there exists a limiting maximum ratio of /\i//'i, depending on the damping. Since all three terms of (96) are always positive,
3tif2arV- g A'2a2
t ' 4 ) This can be rearranged to give
(IS)
(10)
Hence, the smaller f is, the more prominent will be the third superharmonic component. Also, for small forcing amplitudes AF which would result in small i\, very low damping is necessary to bring out a dominant third superharmonic.3
3 The criterion given in (10) may be modified somewhat, if 51 li-order harmonies are included in solution (7).
294 / J U N E 19 7 0 Transactions of the ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms

I
EC
TIO
UJ a
2.0
18
1.6
1.4
1.2
1.0
.8
.6
.4
.2
1
-
1
T i r
/ x X / A
A ^"""~
/ i i i
i r r^ i A F ' . I 8
SHM
SBHM %
SBHM J/2
SBHM y 3
159 '2 /
1 / l.59r,
/ >
/ 4 o o
x ' 5 j i /
T r
X
A A O 9
O
"•"" • • • • l.59r, •
1 \ j 1 1 1
„ T _ _ 1 _ 1 _ _ ,
1 A ,e corresponds
l.59r
. />
/ /
/
1 1 1 1
1 1 1
!o forcing frequency)
VVC
a
. /
W c t B t l r w0
= ^ f ,
l.59r.
/ N.59r3
1 I
-
--
--
1.0 1.2 14 16 18 2.0 22 2.4 2.6 2 8 3 0 3.2 34 3.6 3.8 4.0
FREQUENCY- ft
Fig. 4 Steady-slate solutions (subharmonic range)
SPHM Order 2. To obtain the solution of this SPHM, (he complete equations of (8) with n = 1 must be taken into consideration. For simplicity, first consider f = 0 ease in which (8d) reduces to
AKa Atr-i + - —- ivwi = 0
Since i'-i 7^ It, if leads lo
_, _ 4(4 - a)
AKa - '2(rr + /v., + ftr)
(17)
(18)
Because (,•,'- -4- nn -j- r:r) > 0, therefore SPHM order 2 exists only at a < 4, or {I > i/.l. liquation (18), together with (86), (8/), form the complete solution for f = 0 case. Neglecting the small component, of r3 and discarding the associated equation (8/) will give the simple form of
9 7 - a - - Karc ] n = 0.8308.1,,
4(4 - a)
AKa
(19a)
(196)
(14 - 4 a - VKar^jn = 3.323/1,. (22a)
A5 = ;; ;-- ('I - a ) - 2r, ! (22b) AK a \4 )
Numerical results of (22«), (226) for r3 and r% are shown in Fig. 2. The bifurcation from the SUM solution near fl = 2A is noted. Also, it is to be noted here that the r2 component corresponds to the forcing frequency <s>,,.
The complete solution of (8) gives very small n and ;/o component while not affecting the r%and r3 of (22a), (22b) significantly. Similarly (22a), (226) gives a very good approximation for small damping f < 0.001 present.
SBHM Order '/:,. The solution can be obtained from (8) with n = 3 in which y0 = x-i = y-i = 0 satisfies (8a), (3d), (8e). Similar to the case of SPHM order 3, there are 2 equilibrium solutions in the present case; one is i\ = 0, the other is j?-i| » jr.-ij. The n = 0 solution is essentially the SUM solution discussed previously, since n = 3 here.
For the |r,| » |r3i case, first consider f = 0 in which (8) reduces to
27 Kot ('J a - t) -I ?— (n- 2,-^j = 0 (23a)
Numerical results of (19a), (196) for n and n are shown in Fig. 2. The bifurcation from the SHM solution near O = 'A is noted. The complete solution of (8) gives a very small n component, while not affecting n and n of (19a), (196) significantly. Similarly (19a), (196) gives a good approximation for small damping f < 0.001 present.
SPHM Order '•/•,. Similar to the previous case, with n = 2 and f = 0 in (8), equation (8/) reduces to
9 , :>,Ka - + r-.r
4 4
A»r3 - -Kan3 = 7.477/1 „ (236)
'AKa + - — (2n + nW + I 2r,
Since |c:ij » |r2[ » jn], (20) becomes approximately,
4 / 9 \ 7.3!i ~ i - - a I - 2(r,2 + rr)
SKa \ 4 /
= 0 (20)
(21)
Again (21) shows SPHM of 'A exists only at a < 9A or il > -/-,,. The complete solution for rit r%, and r3 can be obtained by solving (86), (8d), (S / ) i u f = Ocase.
Further approximation can be obtained by neglecting t\ component and discarding (86). This gives
Equation (23a) shows SBHM order 'A exists only for a < '/» or 0 > 3. Numerical results obtained by solving (23a), (236) simultaneously for n and r3 are shown in Fig. 4. The bifurcation from the SHM solution near il = 3 is noted. For small damping f < 0.001, the solutions are close to those from (23a), (236). Sizable forcing components n are present here since the "effective" forcing amplitude /l0ff is relatively larger than for the super-harmonic case. This effective forcing amplitude for Dufling's equation (4) would be
/Ut iPAF (24)
SBHM Order 'A- I | 1 this case, the solution can be obtained from (8) withn. = 2. Again considering f = 0 case first, (86) reduces
1 \ 'AKa , I + — (/'r + 2r,-' + 2r3
2)
AKa + (,22 _ ri2)n = 0 ( 2 5 )
4
Since p'ij, |/2| iJ> p',i|, (25) can be approximated as
Journal of Applied Mechanics JUNE 1 9 7 0 / 295
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms

1 - 4 a
'•ilia (2(3)
Equation (20) shows this SB ELM only occurs for a < lU <»-
12 > 2. Complete solution can be obtained by solving (86), (Sd), (8/) in the case f = 0.
Similar to the previous cases, neglecting r3 effects will give a simple solution by solving (20) together with equation (27).
9A"a
4 •/•2 = -0.8308,1,,, (27)
The numerical results of (20), (27) give a good approximation to the complete solution of (8) (with f = 0 and small damping f < 0.001), and are shown in Fig. 4. The bifurcation from the SUM solution near 0 = 2 is noted. Again, A„u is relatively large, thus leading to substantial forcing components r->.
SBHM Order 2/3. The solution can be obtained from (8) with n = .:!. Considering f = 0 first, (Sd) reduces to (for r% ^ 0)
4 oKa \ 9
2(rr + Tin + r-/) (28)
Equation (28) shows that SBHM order 73 only occurs at a < V's or 0 > 3/2. Equation (28) together with (86), (8/) will give the solution for f = 0.
Similar to the previous cases, neglecting n effects will lead to a simple form as
4 4 — a I — 2n2
?>Ka \ 9
1 9 - + a + - Kan1 n = -0.8308/1, , 9 4
(29a)
(296)
The numerical results of (29) give a good approximation to the complete solution (8) (with f = 0 and f < 0.001) and are shown in Fig. 4. The bifurcation from the SHM solution near 0 = V. is noted. Again, substantial n components are present due to relatively large AM-
Stability Conditions
To solve the problem of stability, a small variation £ from the periodic state of equilibrium is considered, and r/o + £ substituted in place of q in (0), where qo(r) is the periodic solution of (6) whose stability is to be investigated. This is called variational method and will lead to a Hill-type equation of the form
H + 2«f V"a£ + ( 6„ + 2 Y, 6»y s i i l VT + 2 ]P
X £ = 0 (30)
where 0O, &\„, and 6C„ are functions of (i/6, xi} 1/1, :c2, j / 2 , x3, 1/3, «, K, n, f).
Now, following the same procedures as in Hayashi [3], except here, more terms are involved for better accuracy. The dimension of the characteristic determinant is taken as 7 X 7 for the even stability regions and 0 X 6 for the odd stability regions. For the stable solutions, the two determinants
Acvcn(0) = |7 X 7j
A„d,i(0) = [0 X 6j (31.)
must both be greater than zero. The stability investigation showed that SHM solutions were
stable except in the usual overhanging portion near 0 = 1 and in the vicinity of 0 = 1 jm where m = V'a, 2, 3, . . . 2/3,
1/i, 1/-j, . . . The S P H M and SB1LM solutions, which bifurcated from the
lais
wvvvwwwvyw — - -; i ]
(a - ) SHM ^t") S P H M orler Z
lm aiHttlTO mm -v>.lJs'' ! '
MVWVW
liiftli
t-i __,
-^agf t^ - '——--———•• "11 — ffi-
( c ) S P H M OrJkr -3 (_dl) S P H M O r d e r 3 / j .
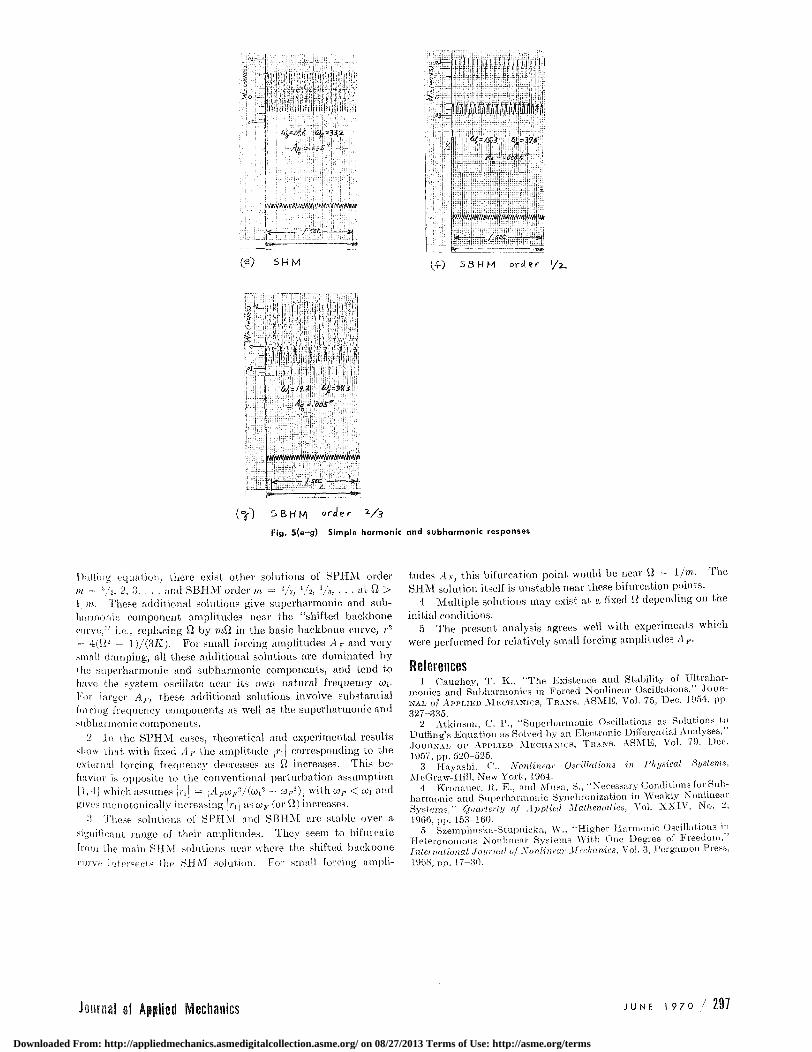
Fig. 5(a-d) Simple harmonic and superharmonic responses
unstable SHM vicinities, were found to be stable up to large amplitudes.
Experiment A spring steel beam with lS-in. length and 0.02l-in. X 0.5-in.
cross section was rigidly clamped at both ends and then mounted on a shake table. The beam, which had a basic frequency Wo = 13.4 cps, was subjected to some small tension to give a natural frequency Wi of about 20 cps. The critical damping ratio f was found from, a transient decay test to be f = 0.0006 approximately. The table was oscillated over a frequency range from 2-50 cps, and a relatively small shaking amplitude AF == 0.25 was used. The amplitude and frequency of the shake table was measured using strain gages, and the response of the beam was recorded by a capacitor probe at the midpoint of the beam. A two channel Sanborn recorder was used to record the responses of the table and beam.
Some typical responses of SHM, SPHM, and SBHM as obtained experimentally are shown in Figs. a(a-g). The top trace shows the beam response, while the lower trace shows the base motion. All frequencies are in cps, and the top scale is nonlinear because of the capacitor probe characteristics. The experimental steady-state amplitudes are plotted versus frequency 0 in Figs. 2 and 4, together with the previous theoretical results. In some cases, different superharmonic motions were found to exist at the same forcing frequency coF, depending on the initial kick given the beam.
Conclusions 1 In addition to the conventional SHM response for the
296 / J U N E 19 70 Transactions of the MME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms
> o -i ̂ :m^j:
i.iif..lt,iiliilis.ili!i;ili,,i
A/- -.US"
i . /sic- », r
(e) 5 H M
* -
i
! ! . • " j . ' •
-/***- ~ ^ 1 ,
(+) S B H M orMer ' / * .
•• j?Ssii, if i t " ! i i ' rib
' 1 / ' I , 1 ,
lS!l:p;r'iii?h ,,i H 1 i'l I I I i i !
Areas'
vfmmimimN'mmtmm
Ur /SIC - * j
( ^ ) 5 B H M """der Z / J
Fig. 5(e~s) Simple harmonic and subharmonic responses
Dulling equation, there exist other solutions of SPHM order 2, 2, 3, and SBHM order m — 'y's, 'A, . at 12 >
i/'m. These additional solutions give superharmonic and sub-harmonic component amplitudes near the "shifted backbone curve," i.e., replacing 12 by m!2 in the basic, backbone curve, r2
= 4(02 - l) /(3i£). For small forcing amplitudes AF and very small damping, all these additional solutions are dominated by the superharmonic and subharmonic components, and tend to have the system oscillate near its own natural frequency oil-For larger AF, these additional solutions involve substantial forcing frequency components as well as the superharmonic and subharmonic components.
2 In the SPHM cases, theoretical and experimental results show that with fixed AF the amplitude | n | corresponding to the external forcing frequency decreases as 12 increases. This behavior is opposite to the conventional perturbation assumption [1,4] which assumes \n\ = \AFo)F*/(u>i2 — co,,2)| wi ther , < coi and gives monotonicaily increasing jrii astoF (or 12) increases.
•i These solutions of SPHM and SBHM are stable over a significant range of their amplitudes. They seem to bifurcate from the main SUM solutions near where the shifted backbone curve intersects the SUM solution. For small forcing ampli
tudes AF, this bifurcation point would be near 12 = l/m. The SHM solution itself is unstable near these bifurcation points.
4 Multiple solutions may exist at a fixed 12 depending on the initial conditions.
5 The present analysis agrees well with experiments which were performed for relatively small forcing amplitudes A F-
References 1 Caughey, T. K., "The Existence and Stability of Ultrahar-
monics and Subharmonics in Forced Nonlinear Oscillations," JOURNAL of APPLIED MECHANICS, TRANS. ASME, Vol. 75, Dec. 1954, pp. 327-335.
2 Atkinson, C. P., "Superharmonic Oscillations as Solutions to Buffing's Equation as Solved by an Electronic Differential Analyses," JOURNAL OF APPLIED MECHANICS, TRANS. ASME, Vol. 79, Dec. 1957, pi). 520-525.
3 Hayashi, C , Nonlinear Oscillations in Physical hyslems, McGraw-Hill, New York, 1964.
4 Kronauer, R. E., and Musa, S., "Necessary Conditions for Subharmonic and Superharmonic Synchronization in Weakly Nonlinear Systems," Quarterly of Applied Mathematics, Vol. XXIV, No. 2, 1960. pp. 153-160.
5 Szemplinska-Stupnicka, W„ "Higher Harmonic Oscillations in Heteronomous Nonlinear Systems With One Degree of Freedom," International Journal of Nonlinear Mechanics, Vol. 3, Pergamon Press, 1968, pp. 17-30.
Journal i f Applied Mechanics JUNE 1 9 7 0 / 2 1 7
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 08/27/2013 Terms of Use: http://asme.org/terms