notes for school exams physics xi simple harmonic motionvidyadrishti.com/shm feb 13.pdf · •...
TRANSCRIPT

2013-2015
Notes for School Exams
Physics XI
Simple Harmonic Motion P. K. Bharti, B. Tech., IIT Kharagpur
© 2007 P. K. Bharti All rights reserved.
www.vidyadrishti.com/concept

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
2 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
SSoommee DDeeffiinniittiioonnss
• Periodic motion: A motion which repeats itself after a regular interval of time is called periodic motion.
• Oscillation/ Vibration: Those periodic motion which repeats itself about equilibrium point are known as oscillation or vibration.
Note: Equilibrium point is the point where net force and/or net torque is zero.
• e.g., uniform circular motion is a periodic motion, but it is not oscillatory.
• Every oscillatory motion is periodic, but every periodic motion need not be oscillatory.
• Difference between oscillation & vibration: When the frequency is small, we call it oscillation. e.g., the oscillation of a pendulum. When the frequency is high, we call it vibration. e.g., the vibration of a string of a guitar.
• Time Period (T): The smallest interval of time after which the periodic motion is repeated is called time period. S.I. unit: second (s)
• Frequency (ν or f): The number of repetitions that occur per unit time is called frequency of the periodic motion. It is denoted by ν (Greek nu) or f. Frequency is the reciprocal of time period T. Therefore,
1v fT
= = (relation between frequency and time
period)
S.I. unit: hertz (Hz). 1 Hz = 1 s-1
• Physically, if a body repeats its motion faster, it will said to have higher frequency.
Periodic, harmonic and non-harmonic functions (Mathematically)
• Any function that repeats itself at regular intervals of its argument is called a periodic function. The periodic functions which can be represented by a sine or cosine curve are called harmonic functions.
• All harmonic functions are necessarily periodic but all periodic functions are not harmonic. The periodic functions which cannot be represented by single sine or cosine function are called non-harmonic functions. The following sine and cosine functions are periodic with period T:
f (t) = sin ωt = sin 2 tTπ
and g (t) = cos ωt = cos 2 tTπ
SSpprriinngg mmaassss ssyysstteemm oonn aa ffrriiccttiioonnlleessss ssuurrffaaccee
• Let us consider a mass attached to a spring which in turn, attached to a rigid wall. The spring-mass system lies on a frictionless surface.
• We know that if we stretch or compress a spring, the mass will oscillate back and forth about its equilibrium (mean) position. Equilibrium position is the point where net force and net torque is zero.
• The point at which the spring is fully compressed or fully stretched is known as extreme position.
• The maximum displacement of the body oscillation on either side of the equilibrium position is called the amplitude. In other language, we can say that amplitude is the distance between mean position and extreme position. Amplitude is denoted by letter A and its SI unit is m.
• If we observe motion of the block carefully, we find that speed i.e., magnitude of velocity is maximum at mean position. Similarly speed is minimum i.e., zero at extreme positions as block stops momentarily at extreme positions.
• Since, equilibrium position is the point where net force and net torque is zero. Therefore, acceleration of the mass is zero at equilibrium point. Magnitude of acceleration is maximum at extreme positions.

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
3 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
SSiimmppllee HHaarrmmoonniicc MMoottiioonn
• Let us again consider the spring-mass system lies on a frictionless surface. We know that if we stretch or compress the spring, the mass will oscillate back and forth about its equilibrium (mean) position.
• Let us displace spring by a distance x towards right. As we displace it towards right, spring force will try to bring mass m towards left. Thus at a displacement x, a spring force F develops in the spring in the left direction. We also say this force F as restoring force as it tries to bring back mass m towards the mean position.
• As this restoring force F is opposite to that of
displacement, therefore, we can write from Hooke’s Law
F = – kx (S.H.M.) …(A)
(negative sign because F is opposite to x)
F ∝ – x (S.H.M.) …(B)
(because k is a constant) • Thus, the resultant restoring force F acting on the body
is proportional to the displacement x from the equilibrium position and is directed opposite to the displacement, i.e., towards the equilibrium point. This kind of motion is known as simple harmonic motion (S. H. M.).
• Again, from Newton’s 2nd
Law, we have
F = ma
Therefore, using (A),
kx ma− =
ka xm
⇒ = − …(i)
• Since k and m are constants, acceleration a of the oscillating body is directly proportional to its displacement from the equilibrium position and is directed opposite to the displacement, i.e.,
a ∝ – x (S.H.M.) …(C)
• Thus, acceleration a of the body is proportional to the displacement x from the equilibrium position and is directed opposite to the displacement, i.e., towards the equilibrium point. This kind of motion is known as simple harmonic motion (S. H. M.)
Definition of SHM
• We can define SHM as an oscillatory motion in which net restoring force or acceleration of the oscillating body is directly proportional to its displacement from the equilibrium position and is directed towards the mean position.
• The body performing SHM is known as a simple harmonic oscillator (SHO).
• If we put 2km
ω= in eqn. (i), we get
2a xω= − (S.H.M.) …(D)
where, 𝛚𝛚 is known as angular frequency of SHM.
Relation between angular frequency (𝛚𝛚) with time period (T) and frequency (f)
• Loosely speaking, we can consider angular frequency to be the angular velocity when a body moves in uniform circular motion.
• Clearly, the particle covers an angular displacement 2π rad in a time equal to its time period T. Therefore,
2Tπω = (angular frequency in terms of time period)
• SI unit of ω is s–1 . • Since, frequency f is given by f = 1/T, therefore we can
write
2 2 fTπω π= =
• Time period of spring mass oscillator, 2T πω
=
2 mTk
π= (Time period of spring-mass oscillator)
• Clearly,
2 2k k mm
ω ω= ⇒ =
S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
4 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
SSHHMM ((QQuuiicckk RReevviissiioonn))
• A motion is linear SHM if given conditions are satisfied: 1. Motion must be oscillatory and hence periodic. 2. Force or acceleration of the particle is directly
proportional to its displacement from the equilibrium position.
3. Force or acceleration is always directed opposite to the displacement i.e., towards the mean position. Expressions of S.H.M. are F ∝ – x F = – kx a ∝ – x
2a xω= −
2 2with & 2k fm T
πω ω π= = =
LLiinneeaarr SSHHMM AApppplliiccaattiioonn mmeetthhoodd
• STEP I: Find out the equilibrium position: At equilibrium position net force and net torque is zero. For linear SHM net force should be zero at equilibrium position.
• STEP II: Assume x = 0 at the equilibrium position. Displace particle at a distance x from the equilibrium position.
• STEP III: Draw FBD of the particle when the particle is at a distance x from the equilibrium.
• STEP IV: Write Newton’s 2nd
law. Write this equation in the form of 2a xω= − and find out𝜔𝜔.
• STEP V: Use T = 2π/𝜔𝜔 to find out time period.
•• EExxaammppllee:: A mass m is attached to a vertical spring of spring constant k. Suppose the mass is displaced from the equilibrium position vertically. Find the time period of the resulting oscillation.
• Solution: Let us use step by step method to find out the time period of the oscillation.
• STEP I: Find out the equilibrium position. Let the elongation of the spring be y at the equilibrium position.
• We draw FBD to find out equilibrium position. Clearly forces on the mass are: weight mg downward and spring force ky upward . Therefore, we get,
mg – ky = 0
y = mg/k …(i)
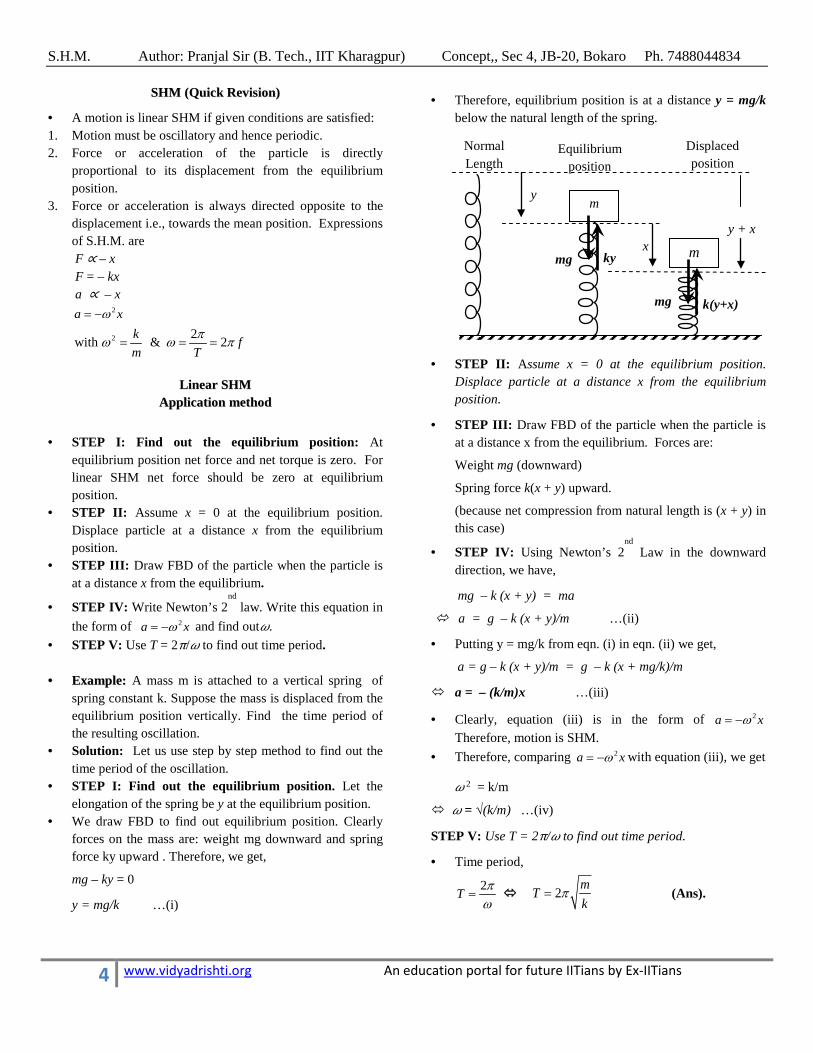
• Therefore, equilibrium position is at a distance y = mg/k below the natural length of the spring.
• STEP II: Assume x = 0 at the equilibrium position. Displace particle at a distance x from the equilibrium position.
• STEP III: Draw FBD of the particle when the particle is at a distance x from the equilibrium. Forces are:
Weight mg (downward)
Spring force k(x + y) upward.
(because net compression from natural length is (x + y) in this case)
• STEP IV: Using Newton’s 2nd
Law in the downward direction, we have,
mg – k (x + y) = ma
a = g – k (x + y)/m …(ii)
• Putting y = mg/k from eqn. (i) in eqn. (ii) we get,
a = g – k (x + y)/m = g – k (x + mg/k)/m
a = – (k/m)x …(iii)
• Clearly, equation (iii) is in the form of 2a xω= − Therefore, motion is SHM.
• Therefore, comparing 2a xω= − with equation (iii), we get
𝜔𝜔 2 = k/m
𝜔𝜔 = √(k/m) …(iv)
STEP V: Use T = 2π/𝜔𝜔 to find out time period.
• Time period,
2T πω
= 2 mTk
π= (Ans).
Equilibrium position
Normal Length
y + x x
y
Displaced position
m
m mg ky
mg k(y+x)

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
5 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
SSIIMMPPLLEE PPEENNDDUULLUUMM
• A simple pendulum is an idealized model consisting of a point mass (which is known as bob) suspended by a massless, unstretchable string.
• When the point mass is pulled to one side of its equilibrium position and released, it oscillates in a circular arc about the equilibrium position. We shall show that, provided the angle is small (less than about 10°), the motion is that of a simple harmonic oscillator.
• Let us consider the bob of mass m is suspended by a light string of length L that is fixed at the upper end.
• Clearly the equilibrium position is the lowest position of the bob. Let the bob is rotated by an angle θ from equilibrium. We have to show net torque τ is directly proportional to angular displacement θ and is directed opposite to θ.
• Forces acting on the particle are:
Weight mg downward and
Tension T along the string.
• Now net torque about suspension point is given by
τ = (mg sinθ) L …(i)
• As the amplitude is small (less than about 10°),
sin θ ≈ θ • Hence, eqn. (i) becomes
τ = – mgL θ …(ii)
(negative sign because torque is in clockwise direction, whereas angular displacement is in anticlockwise direction)
• Thus, from (ii), τ ∝ –θ
• Hence, motion is SHM. • Now, from (ii)
τ = – mgL θ Iα = – mgL θ mL2 α= – mgL θ (∵I = mL2 )
– gL
α θ=
2 – α ω θ=
where gL
ω =
• Time period is given by: 2T πω
=
2 LTg
π⇔ = (time period of a Simple Pendulum)
Linear SHM Kinematics
Displacement
• We know that a motion is SHM if a = – ω2x . • From Kinematics we know that acceleration is given by
2
2
d xadt
=
• Thus, a = – ω2x 2
22 d x x
dtω⇔ = −
which is a differential eqn. of 2nd
order.
• Solution of this differential eqn. is given by
x = A sin (ω t + ø)
(displacement of a particle executing Linear SHM )
where,
x = displacement of particle from mean position at time t
A = amplitude
ω = angular frequency
(ω t + ø) = phase ø = phase constant or phase difference
• Thus, any eqn., where displacement can be written in the form of x = A sin (ω t + ø), represents SHM.
• Note & Remember: • If you study different books you will find different
expressions for SHM, i.e., you may get x = A cos (ω t + ø) instead of x = A sin (ω t + ø).
• You can use either of eqns. Both are correct. Thus, displacement:
x = A sin (ω t + ø)
or x = A cos (ω t + ø)
mg cos θ
mg sin θ
L
θ T
O
mg
θ

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
6 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
Velocity & Acceleration
• Eqn. of displacement by a particle executing SHM is given by
x = A sin (ω t + ø) …(1) • Differentiating this eqn. wrt. time t we get velocity:
v = dx/dt
v =A ω cos (ω t + ø) …(2) • Differentiating, velocity v wrt. time t, we get acceleration.
a = dv/dt
v = – A ω2 cos (ω t + ø) …(3) • If you compare eqn. (1) and (3) you will get
a = – ω2x
which represents SHM
• Using eqns. (1) & (2) and little Trigonometry, we can find the relation between velocity and displacement of the particle undergoing SHM. This eqn. is given by
2 2v A xω= ± −
(relation between velocity & displacement in SHM)
Energy of the simple harmonic oscillator
• Let the displacement and velocity of the mass executing SHM at a particular instant of time be x & v respectively.
• We can write x & v in SHM as: x = A sin (ω t + ø) and v =A ω cos (ω t + ø)
• Hence, kinetic energy of mass :
K = ½ mv2 = ½ m A
2 ω
2 cos
2 (ω t + ø) …(1)
• Similarly, potential energy of spring :
U = ½ kx2 = ½ k A
2 sin
2 (ω t + ø) …(2)
• Using, ( )2 ... 3k k mm
ω ω= ⇔ =
• Thus from (1), we have
K = ½ mv2 = ½ m A
2 ω
2 cos
2 (ω t + ø)
K = ½ k A2 cos
2 (ω t + ø) …(4)
• Hence, Mechanical Energy of the system at that instant
ME = K+U = ½ kA2cos
2(ωt + ø) + ½ kA
2sin
2(ωt + ø)
ME = ½ k A2
(Using cos2 (ω t + ø) + sin
2 (ω t + ø) = 1)
• Hence, Mechanical energy of the Simple harmonic oscillator is given by:
ME = ½ k A2 = ½ m A
2 ω
2
(Mechanical Energy of Simple Harmonic Oscillator)
• That is, the total mechanical energy of a simple harmonic
oscillator is a constant of the motion and is proportional to the square of the amplitude.
• Note that U is small when K is large, and vice versa, because the sum must be constant.
• Since, K = ½ mv2 = ½ m A
2 w
2 cos
2 (w t + ø) and
U = ½ kx2 = ½ k A
2 sin
2 (w t + ø), we can plot energy
diagram as shown below:
Effective Spring Constant
• Let n ideal springs of spring constants k1, k
2, k
3, …, kn.
Let keff
be effective spring constant. Then,
• Series combination:
1 2 3
1 1 1 1 1...eff nK k k k k
= + + + +
• Parallel combination: k
eff = k
1 + k
2 + k
3 + … + k
n
• Time period spring mass system is given by:
2eff
mTk
π=
• If a spring of spring constant k is broken into different pieces then, k x = k
1 x
1 = k
2 x
2 = k
3 x
3 = … = k
n x
n
and x = x1 + x
2 +…+ x
n

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
7 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
Effective g
• Case 1: If a simple pendulum is in a carriage which is accelerating with acceleration , then
effg g a= −
& 2eff
lTg
π=
e.g., if the acceleration a
is upward, then
and 2efflg g a T
g aπ= + =
+
If the acceleration a
is downwards, then (g > a)
and T=2efflg g a
g aπ= −
−
If the acceleration a
is in horizontal direction, then
2 2effg a g= +
In a freely falling lift geff = 0 and T = ∞, i.e., the pendulum will not oscillate .
• Case 2: If in addition to gravity one additional constant
force ,F
(e.g., electrostatic force eF
) is also acting on the bob, then in that case,
effFg gm
= +
& 2
eff
lTg
π=
Here, m is the mass of the bob.
Physical Pendulum
Any rigid body suspended from a fixed support constitutes a physical pendulum . A circular ring suspended on a nail in a wall, a heavy metallic rod suspended through a hole in it etc. are example of physical pendulum. for small oscillations, the motion is nearly simple harmonic. The time period is
2 ITmgl
π=
(time period of a Simple Pendulum)
where I = moment of inertia about suspension point and
l = distance between point of suspension and centre of
gravity
Example: A uniform rod of length 1.00 m is suspended through an end is set into oscillation with small amplitude under gravity. Find the time period of oscillation.
Solution : For small amplitude the angular motion is nearly simple harmonic and the time period is given by
2
2
32 2
1.00 =2 2 1.16 .3 3 9.80
mlIT
mgl mgl
l m smgs
π π
π π
= =
= =×
Oscillations of a liquid column in a U-tube
Suppose the U-tube of cross-section A contains liquid of density ρ upto height h. If the liquid in one arm is depressed by distance x, it rises by the same amount in the other arm. If the left to itself, the liquid begins to oscillate under the restoring force, F = Weight of liquid column of height 2 x F = – A × 2x × ρ × g = – 2 A ρ g x …(i) i.e., F ∝ – x Thus the force on the liquid is proportional to displacement and acts in its opposite direction. Hence the liquid in the U-tube executes SHM. Comparing equation (i) with F = – k x, we have k = 2 A ρ g The time-period of oscillation is
22 2 22
m A h hTk A g g
ρπ π πρ
× ×= = =
If l is the length of the liquid column, then
2 and 2 .2ll h Tg
π= =
Equilibrium level x
h
2x
x

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
8 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
Oscillations of a body dropped in a tunnel along the
diameter of the earth
Let us consider earth to be a sphere of radius R and centre O. A straight tunnel is dug along the diameter of the earth. Let g be the value of acceleration due to gravity at the surface of the earth. Suppose a body of mass m is dropped into the tunnel and it is at point P at a depth d below the surface of the earth at any instant. If g’ is acceleration due to gravity at P, then
' 1 d R dg g gR R
− = − =
If x is distance of the body from the centre of the earth (displacement from mean position), then
'
R d xyg gR
− =
∴ =
Therefore, force acting on the body at point P is
' ...(i)
. .,
mgF mg xR
i e F x
= − = −
∝ −
Thus the body will execute SHM with force constant, Comparing equation (i) with F = – k x, we have
mgkR
=
The period of oscillation of the body will be
2 2 2 ./
m m RTk mg R g
π π π= = =
Oscillation of a floating cylinder
In equilibrium, weight of the cylinder is balanced by the upthrust of the liquid.
Let the cylinder be slightly depressed through distance x from the equilibrium position and left to itself. It begins to oscillate under the restoring force, F = Net upward force = Weight of liquid column of height x or, F = – A x ρl g = – A ρl g x …(i) i.e., F ∝ – x. Negative sign shows that F and x are in opposite directions. Hence the cork executes SHM with force constant, k = A ρl g Also, mass of = A ρ h ∴ Period of oscillation of the cork is
2 2 2l l
m A h hTk A g g
ρ ρπ π πρ ρ
= = =
Oscillation of a ball in the neck of an air chamber
Let us consider an air chamber of volume V, having a neck of area of cross-section A and a ball of mass m fitting smoothly in the neck. If the ball be pressed down a little and released, it starts oscillating up and down about the equilibrium position. If the ball be depressed by distance x, then the decrease in volume of air in the chamber is ΔV = Ax.
∴ Volume strain V AxV V
∆= =
If pressure P is applied to the ball, then hydrostatic stress = P ∴ Bulk modulus of elasticity of air,
or / /
P P EAE P xV V Ax V V
= − = − = −∆
Restoring force, 2
...(i)EAx EAF PA A xV V
= = − = −
Thus F is proportional to x and acts in its opposite direction. Comparing equation (i) with F = – k x, we have,
2EAkV
=
Period of oscillation of the ball is
2 22 2 2/
m m mVTk EA V EA
π π π= = =
(a) If the P-V variations are isothermal, then E = P,
22 .mVTPA
π∴ =
(b) If the P-V variations are adiabatic, then E = γ P
22 .mVTPA
πγ
∴ =
R
A
O
P
d
x
ρ
ρl
P
h
Equilibrium position
ρl ρl
ρ x
Air
x
V
m
A

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
9 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
1. Free oscillations: If a body, capable of oscillation, is
slightly displaced from its position of equilibrium and left to itself, it starts oscillating with a frequency of its own. Such oscillations are called free oscillations. The frequency with which a body oscillates freely is called natural frequency and is given by
01
2kvmπ
=
• Some important features of free oscillations are (a) In the absence of dissipative forces, such a body vibrates
with a constant amplitude and fixed frequency, as shown in figure. Such oscillations are also called undamped oscillations.
(b) The amplitude of oscillation depends on the energy supplied initially to the oscillator.
(c) The natural frequency of an oscillator depends on its mass, dimensions and restoring force i.e., on its inertial and elastic properties (m and k).
Examples. (i) The vibrations of the prongs of tunning fork struck
against a rubber pad. (ii) The vibrations of the string of a sitar when pulled aside
and released. (iii) The oscillations of the bob of pendulum when displaced
from its mean position and released. 2. Damped oscillations: The oscillations in which the
amplitude decreases gradually with the passage of time are called damped oscillations.
• In actual practice, most of the oscillations occur in viscous media, such as air, water, etc. A part of the energy of the oscillating system is lost in the form of heat, in overcoming these resistive forces. As a result, the amplitude of such oscillations decreases exponentially with time. Eventually, these oscillations die out.
• In an oscillatory motion, friction produces three effects: (i) It changes the simple harmonic motion into
periodic motion. (ii) It decreases the amplitude of oscillation. (iii) It slightly reduces the frequency of oscillation.
Examples. (i) The oscillations of a swing in air. (ii) The oscillations of the bob of a pendulum in a fluid.
Differential equation for damped oscillators and its solution
In a real oscillator, the damping force is proportional to the velocity v of the oscillator. Fd = – bv where b is damping constant which depends on the characteristics of the fluid and the body that oscillates in it. The negative sign indicates that the damping force opposes the motion. ∴ Total restoring force = – kx – bv
2
2
2
2
or
or 0
d x dx dxm kx b vdt dtdt
d x dxm b kxdtdt
= − − =
+ + =
This is the differential equation for damped S.H.M. The solution of the equation is x(t) = A e–bt/2m cos (ωd t + ϕ) The amplitude of the damped S.H.M. is A’ = Ae–bt/2m where A is amplitude of undamped S.H.M. Clearly, A’ decreases exponentially with time. The angular frequency of the damped oscillator is
2
24dk bm m
ω = −
Time period, 2
2
2 2
4
dd
Tk bm m
π πω
= =
−
The mechanical energy of the damped oscillator at any instant t is given by
( ) 2 2 /1 1'2 2
bt mE t ka ka e−= =
Obviously, the total energy decreases exponentially with time. As damping constant, b = F/v
∴ SI unit of 2
11 1
N kg ms kg sms ms
b−
−− −= = =
x(t) t
–A
0
+A Constant amplitude
Gradually falling amplitude
x(t) t
–A
0
+A

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
10 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
Resonance
• Figure shows the variation of the amplitude of forced oscillations as the frequency of the driver varies from zero to a large value. Clearly, the amplitude of force oscillations is very small for v << v0 and v >> v0. But when 0 ,v v≈ the amplitude of the forced oscillations becomes very large. In this condition, the oscillator responds most favourably to the driving force and draws maximum energy from it. The case v = v0 is called resonance and the oscillations are called resonant oscillations.
• Resonant oscillations and resonance: It is a particular case of forced oscillations in which the frequency of the driving force is equal to the natural frequency of the oscillator itself and the amplitude of oscillation is very large. Such oscillations are called resonant oscillations and phenomenon is called resonance. Examples.
(a) An aircraft passing near a building shatters its window panes, if the natural frequency of the window matches the frequency of the sound waves sent by the aircraft’s engine.
(b) The air-column in a reasonance tube produces a loud sound when its frequency matches the frequency of the tuning fork.
(c) A glass tumbler or a piece of china-ware on shelf is set into resonant vibrations when some note is sung or played.
Principal of tuning of a radio receiver
Tuning of the radio receiver is based on the principal of resonance. Waves from all stations are present around the antenna. When we tune our radio to a particular station, we produce a frequency of the radio circuit which matches with the frequency of that station. When this condition of resonance is achieved, the radio receives and responds selectively to the incoming waves from that station and thus gets tuned to that station.
a
v v0

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
11 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
Physics Classes by Pranjal Sir (Admission Notice for XI & XII - 2014-15)
Batches for Std XIIth
Batch 1 (Board + JEE Main + Advanced): (Rs. 16000) Batch 2 (Board + JEE Main): (Rs. 13000) Batch 3 (Board): (Rs. 10000) Batch 4 (Doubt Clearing batch): Rs. 8000
About P. K. Bharti Sir (Pranjal Sir)
• B. Tech., IIT Kharagpur (2009 Batch) • H.O.D. Physics, Concept Bokaro Centre • Visiting faculty at D. P. S. Bokaro • Produced AIR 113, AIR 475, AIR 1013 in JEE -
Advanced • Produced AIR 07 in AIEEE (JEE Main)
Address: Concept, JB 20, Near Jitendra Cinema, Sec 4, Bokaro Steel City Ph: 9798007577, 7488044834 Email: [email protected] Website: www.vidyadrishti.org
Physics Class Schedule for Std XIIth (Session 2014-15) by Pranjal Sir
Sl. No. Main Chapter Topics Board level JEE Main Level JEE Adv Level Basics from XIth Vectors, FBD, Work, Energy, Rotation,
SHM 3rd Mar to 4th Apr 14
1. Electric Charges and Fields
Coulomb’s Law 5th & 6th Apr 5th & 6th Apr 5th & 6th Apr Electric Field 10th & 12th Apr 10th & 12th Apr 10th & 12th Apr Gauss’s Law 13th & 15th Apr 13th & 15th Apr 13th & 15th Apr Competition Level NA 17th & 19th Apr 17th & 19th Apr
2. Electrostatic Potential and Capacitance
Electric Potential 20th & 22nd Apr 20th & 22nd Apr 20th & 22nd Apr Capacitors 24th & 26th Apr 24th & 26th Apr 24th & 26th Apr Competition Level NA 27th & 29th Apr 27th & 29th Apr, 1st,
3rd & 4th May PART TEST 1 Unit 1 & 2 4th May NA NA
NA 11th May 11th May 3.
Current Electricity Basic Concepts, Drift speed, Ohm’s
Law, Cells, Kirchhoff’s Laws, Wheatstone bridge, Ammeter, Voltmeter, Meter Bridge, Potentiometer etc.
6th, 8th, 10th, 13th May
6th, 8th, 10th, 13th May
6th, 8th, 10th, 13th May
Competition Level NA 15th & 16th May 15th, 16th, 17th, 18th & 19th May
PART TEST 2 Unit 3 18th May NA NA NA 20th May 20th May
SUMMER BREAK 21st May 2013 to 30th May 2013 4. Moving charges and
Magnetism Force on a charged particle (Lorentz force), Force on a current carrying wire, Cyclotron, Torque on a current carrying loop in magnetic field, magnetic moment
31st May, 1st & 3rd Jun
31st May, 1st & 3rd Jun
31st May, 1st & 3rd Jun
Biot Savart Law, Magnetic field due to a circular wire, Ampere circuital law, Solenoid, Toroid
5th, 7th & 8th Jun 5th, 7th & 8th Jun 5th, 7th & 8th Jun
Competition Level NA 10th & 12th Jun 10th, 12th, 14th & 15th Jun
PART TEST 3 Unit 4 15th Jun NA NA NA 22nd Jun 22nd Jun

S.H.M. Author: Pranjal Sir (B. Tech., IIT Kharagpur) Concept,, Sec 4, JB-20, Bokaro Ph. 7488044834
12 www.vidyadrishti.org An education portal for future IITians by Ex-IITians
5. Magnetism and Matter
17th, 19th & 21st Jun
17th, 19th & 21st Jun
Not in JEE Advanced Syllabus
6.
Electromagnetic Induction
Faraday’s Laws, Lenz’s Laws, A.C. Generator, Motional Emf, Induced Emf, Eddy Currents, Self Induction, Mutual Induction
24th, 26th & 28th Jun
24th, 26th & 28th Jun
24th, 26th & 28th Jun
Competition Level NA 29th Jun & 1st Jul 29th Jun, 1st, 3rd & 5th Jul
PART TEST 4 Unit 5 & 6 6th Jul NA NA NA 13th Jul 13th Jul
7. Alternating current AC, AC circuit, Phasor, transformer, resonance,
8th, 10th & 12th Jul
8th, 10th & 12th Jul
8th, 10th & 12th Jul
Competition Level NA 15th July 15th & 17th July 8. Electromagnetic
Waves 19th & 20th July 19th & 20th July Not in JEE Advanced
Syllabus PART TEST 5 Unit 7 & 8 27th Jul 27th Jul 27th Jul Revision Week Upto unit 8 31st Jul & 2nd
Aug 31st Jul & 2nd Aug
31st Jul & 2nd Aug
Grand Test 1 Upto Unit 8 3rd Aug 3rd Aug 3rd Aug 9.
Ray Optics
Reflection 5th & 7th Aug 5th & 7th Aug 5th & 7th Aug Refraction 9th & 12th Aug 9th & 12th Aug 9th & 12th Aug Prism 14th Aug 14th Aug 14th Aug Optical Instruments 16th Aug 16th Aug Not in JEE Adv
Syllabus Competition Level NA 19th & 21st Aug 19th, 21st, 23rd, 24th Aug
10.
Wave Optics
Huygens Principle 26th Aug 26th Aug 26th Aug Interference 28th & 30th Aug 28th & 30th Aug 28th & 30th Aug Diffraction 31st Aug 31st Aug 31st Aug Polarization 2nd Sep 2nd Sep 2nd Sep Competition Level NA 4th & 6th Sep 4th, 6th, 7th, 9th, 11th Sep
PART TEST 6 Unit 9 & 10 14th Sep 14th Sep 14th Sep REVISION ROUND 1 (For JEE Main & JEE Advanced Level): 13th Sep to 27th Sep
Grand Test 2 Upto Unit 10 28th Sep 28th Sep 28th Sep
DUSSEHRA & d-ul-Zuha Holidays: 29th Sep to 8th Oct 11.
Dual Nature of
Radiation and Matter Photoelectric effect etc 9th & 11th Oct 9th & 11th Oct 9th & 11th Oct
Grand Test 3 Upto Unit 10 12th Oct 12th Oct 12th Oct 12.
Atoms 14th & 16th Oct 14th & 16th Oct 14th & 16th Oct
13. Nuclei 18th & 19th Oct 18th & 19th Oct 18th & 19th Oct X-Rays NA 21st Oct 21st & 25th Oct
PART TEST 7 Unit 11, 12 & 13 26th Oct NA NA 14. Semiconductors Basic Concepts and Diodes, transistors,
logic gates 26th, 28th, 30th Oct & 1st Nov
26th, 28th, 30th Oct & 1st Nov
Not in JEE Adv Syllabus
15.
Communication System
2nd & 4th Nov 2nd & 4th Nov Not in JEE Adv Syllabus
PART TEST 8 Unit 14 & 15 9th Nov 9th Nov NA Unit 11, 12 & 13 Competition Level NA 8th, 9th & 11th
Nov 8th, 9th, 11th, 13th & 15th Nov
PART TEST 9 Unit 11, 12, 13, X-Rays NA 16th Nov 16th Nov Revision Round 2
(Board Level) Mind Maps & Back up classes for late registered students
18th Nov to Board Exams
18th Nov to Board Exams
18th Nov to Board Exams
Revision Round 3 (XIth portion for JEE)
18th Nov to JEE 18th Nov to JEE 18th Nov to JEE
30 Full Test Series Complete Syllabus Date will be published after Oct 2014