numerical analysis of the compliance of interplanetary ... · compliance of interplanetary cubesats...
TRANSCRIPT
Numerical analysis of the compliance of interplanetary CubeSats with planetary protection requirements Francesca Letizia, Camilla Colombo
University of Southampton
5th Interplanetary CubeSat Workshop |Session A.4 Oxford, 24th May 2016
Planetary protection requirements
Spacecraft and launchers used for interplanetary missions and missions to the Lagrangian points may come back to the Earth or impact with other planets (example: Apollo launchers)
Planetary protection requirements: avoid the risk of contamination
The compliance with requirements should be verified for the nominal trajectory considering inaccuracy & failures
2
Compliance for interplanetary missions
Breakup of the object WT110F during re-entry
(November 2015)
Planetary protection requirements
3
Peculiarities of interplanetary CubeSats
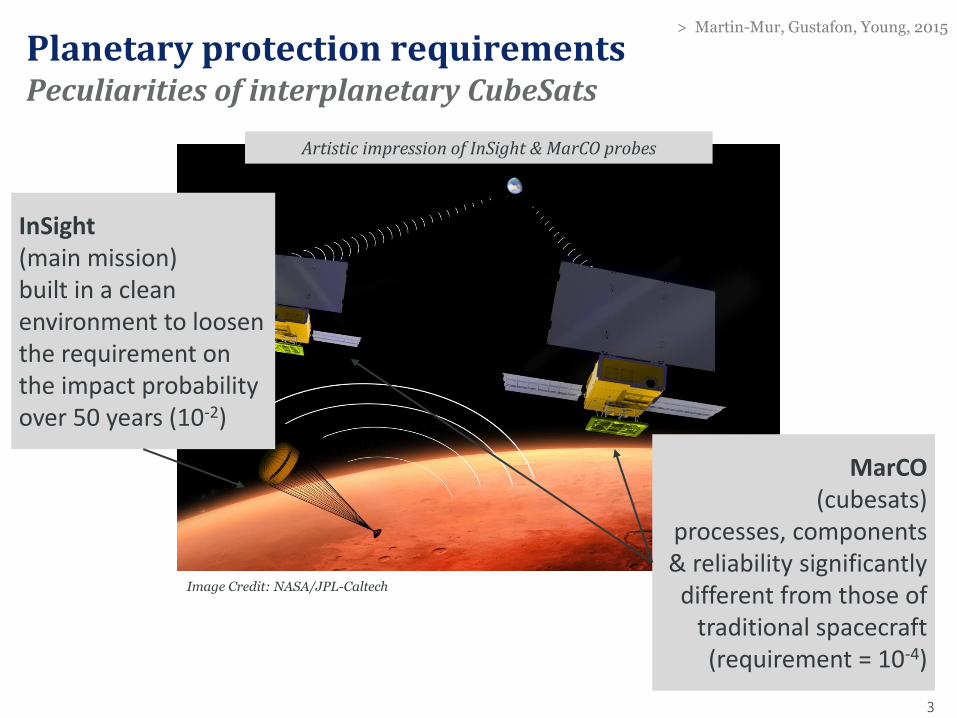
Artistic impression of InSight & MarCO probes
Image Credit: NASA/JPL-Caltech
InSight (main mission) built in a clean environment to loosen the requirement on the impact probability over 50 years (10-2)
MarCO (cubesats)
processes, components & reliability significantly
different from those of traditional spacecraft (requirement = 10-4)
> Martin-Mur, Gustafon, Young, 2015
4
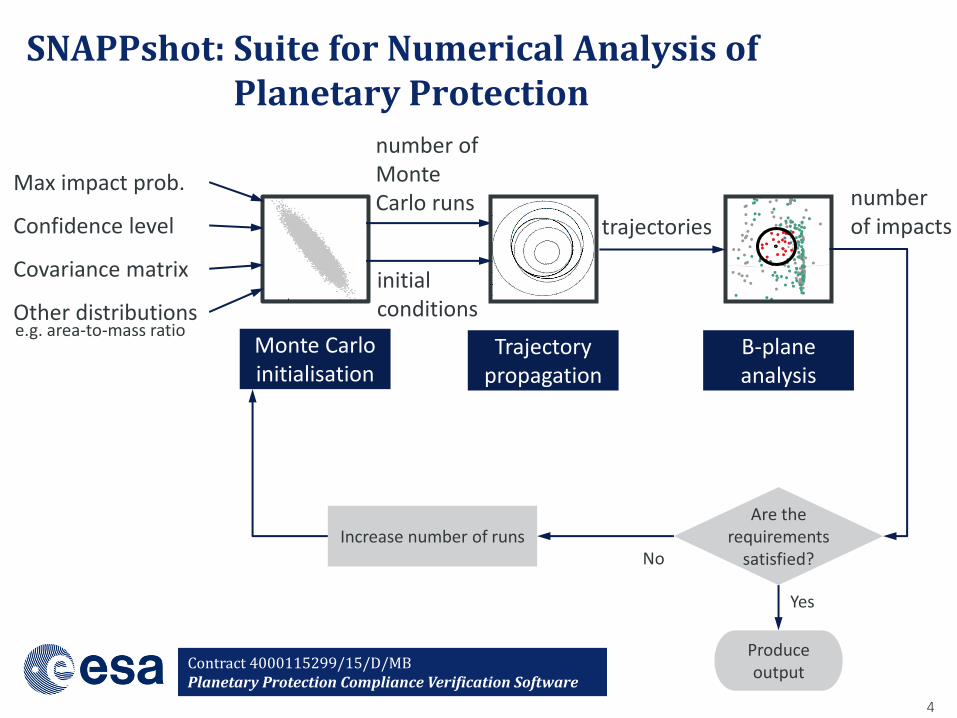
SNAPPshot: Suite for Numerical Analysis of Planetary Protection
Monte Carlo initialisation
Trajectory propagation
B-plane analysis
Max impact prob.
Confidence level
Covariance matrix
Other distributions e.g. area-to-mass ratio
number of Monte Carlo runs
initial conditions
trajectories number of impacts
Are the requirements
satisfied?
Produce output
Yes
Increase number of runs No
Contract 4000115299/15/D/MB Planetary Protection Compliance Verification Software
MonteCarlo initialisation
5
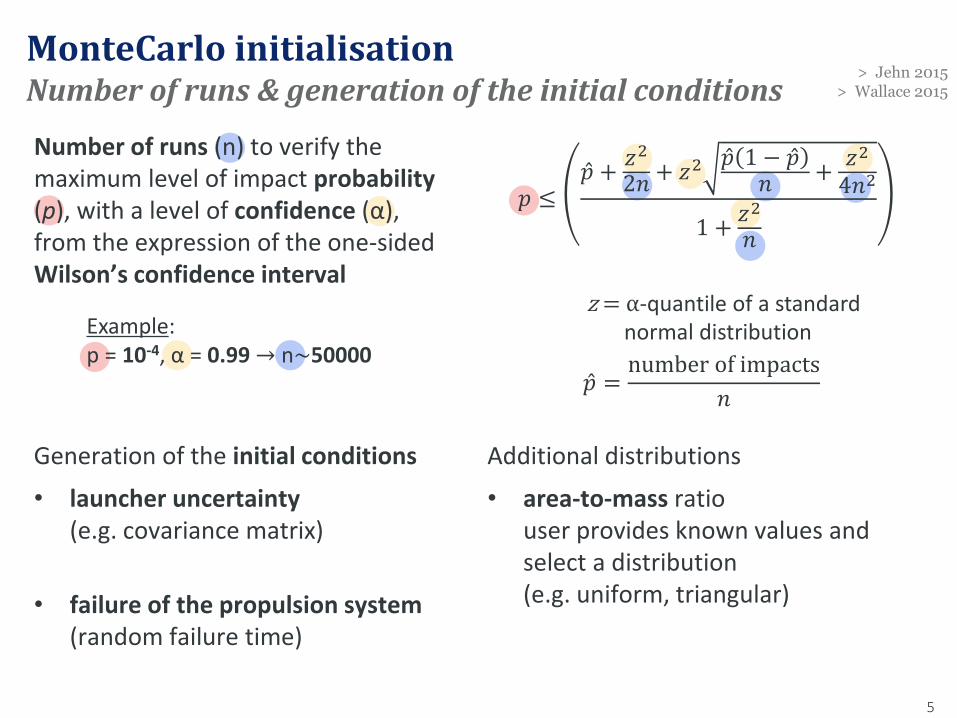
Number of runs & generation of the initial conditions
𝑝 =number of impacts
𝑛
z = α-quantile of a standard normal distribution
Generation of the initial conditions
• launcher uncertainty (e.g. covariance matrix)
• failure of the propulsion system (random failure time)
Additional distributions
• area-to-mass ratio user provides known values and select a distribution (e.g. uniform, triangular)
Number of runs (n) to verify the maximum level of impact probability (p), with a level of confidence (α), from the expression of the one-sided Wilson’s confidence interval
> Jehn 2015 > Wallace 2015
𝑝 ≤𝑝 +
𝑧2
2𝑛 + 𝑧2𝑝 1 − 𝑝
𝑛 +𝑧2
4𝑛2
1 +𝑧2
𝑛
Example: p = 10-4, α = 0.99 → n~50000
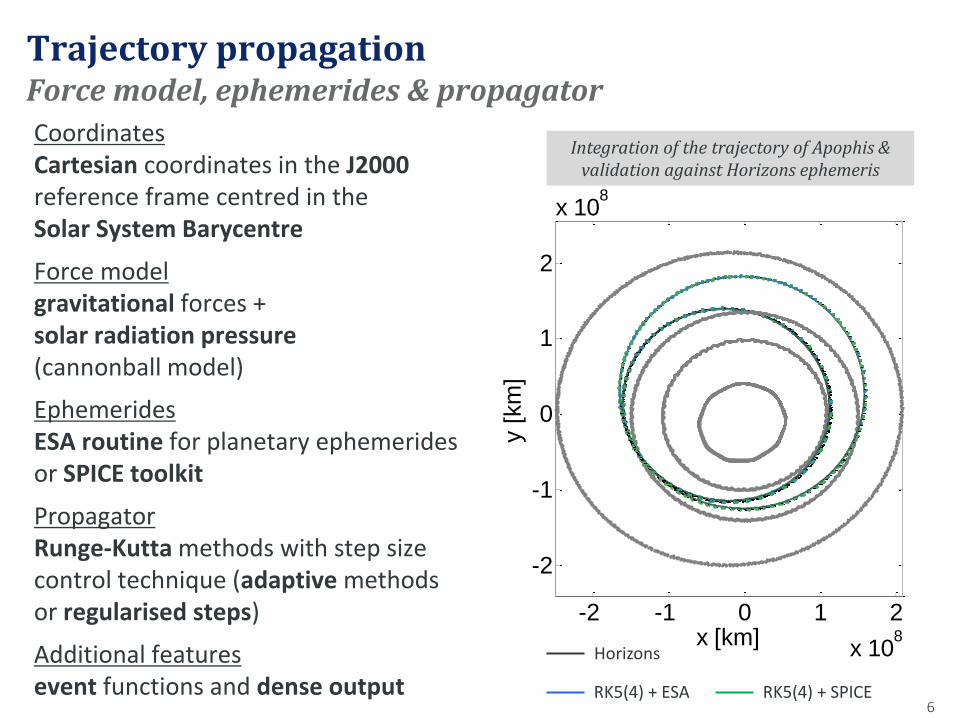
Trajectory propagation
Coordinates Cartesian coordinates in the J2000 reference frame centred in the Solar System Barycentre
Force model gravitational forces + solar radiation pressure (cannonball model)
Ephemerides ESA routine for planetary ephemerides or SPICE toolkit
Propagator Runge-Kutta methods with step size control technique (adaptive methods or regularised steps)
Additional features event functions and dense output
6
Force model, ephemerides & propagator
-2 -1 0 1 2
x 108
-2
-1
0
1
2
x 108
x [km]
y [
km
]
Integration of the trajectory of Apophis & validation against Horizons ephemeris
Horizons
RK5(4) + ESA RK5(4) + SPICE
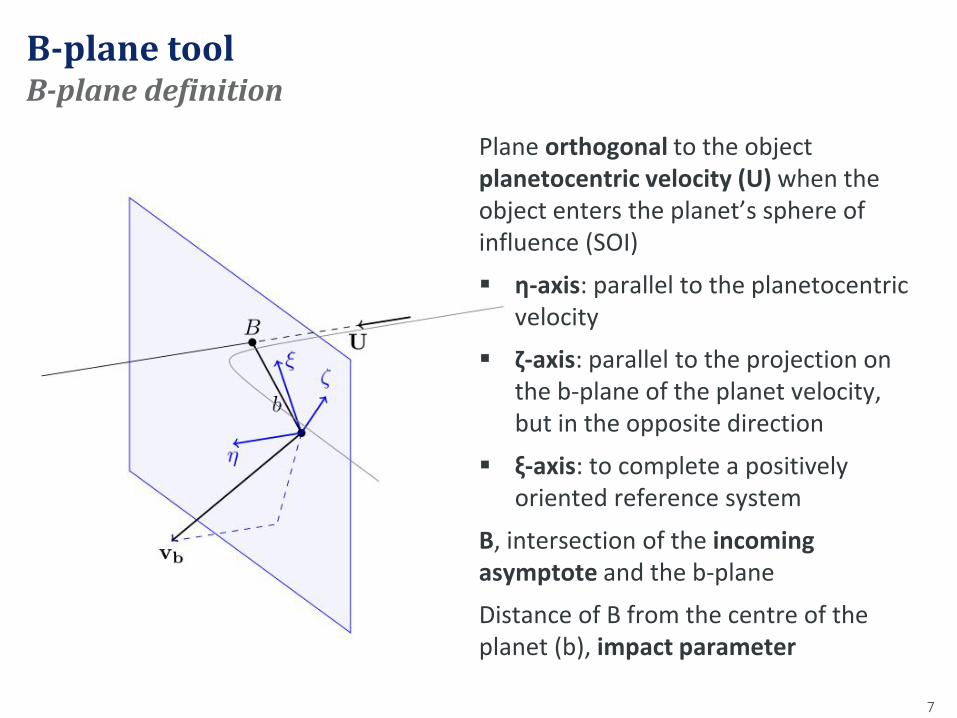
B-plane tool
Plane orthogonal to the object planetocentric velocity (U) when the object enters the planet’s sphere of influence (SOI)
η-axis: parallel to the planetocentric velocity
ζ-axis: parallel to the projection on the b-plane of the planet velocity, but in the opposite direction
ξ-axis: to complete a positively oriented reference system
B, intersection of the incoming asymptote and the b-plane
Distance of B from the centre of the planet (b), impact parameter
7
B-plane definition
-5 0 5
x 104
-6
-4
-2
0
2
4
6
x 104
[km]
[
km
]
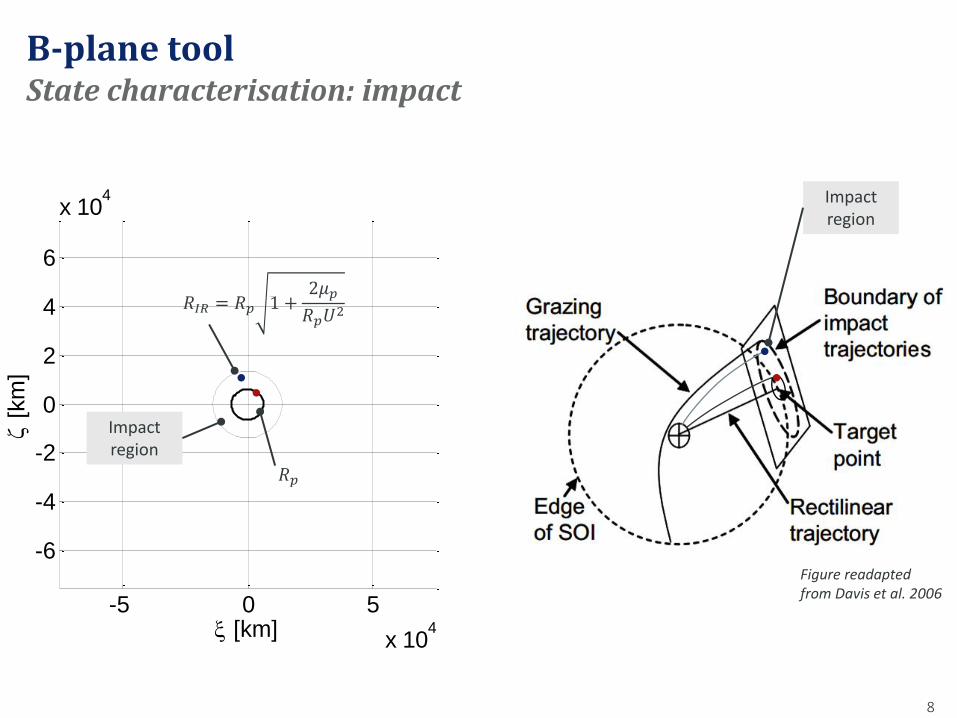
B-plane tool
8
State characterisation: impact
𝑅𝐼𝑅 = 𝑅𝑝 1 +2𝜇𝑝𝑅𝑝𝑈
2
𝑅𝑝
Figure readapted from Davis et al. 2006
Impact region
Impact region
-5 0 5
x 104
-6
-4
-2
0
2
4
6
x 104
[km]
[
km
]
B-plane tool
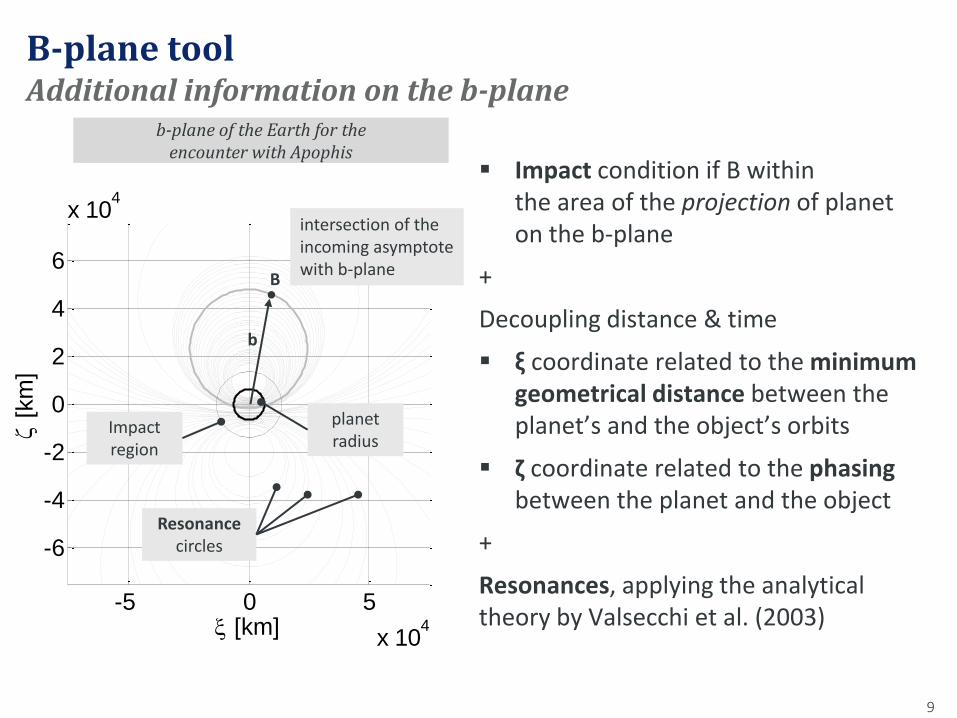
Impact condition if B within the area of the projection of planet on the b-plane
+
Decoupling distance & time
ξ coordinate related to the minimum geometrical distance between the planet’s and the object’s orbits
ζ coordinate related to the phasing between the planet and the object
+
Resonances, applying the analytical theory by Valsecchi et al. (2003)
9
Additional information on the b-plane
B
b
Impact region
intersection of the incoming asymptote with b-plane
planet radius
b-plane of the Earth for the encounter with Apophis
Resonance circles
B-plane tool
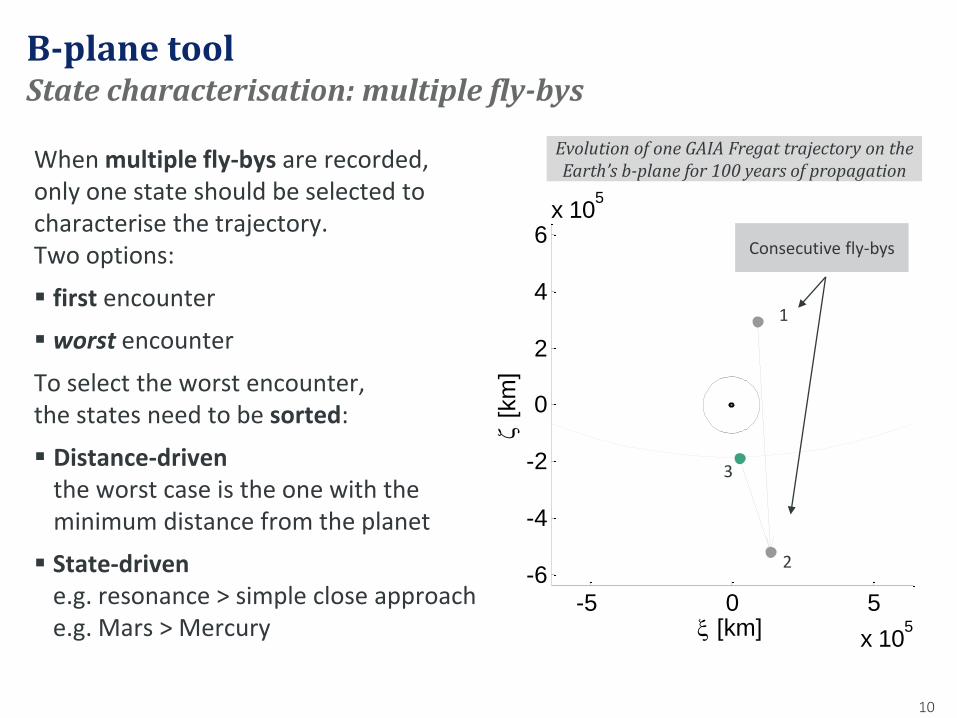
When multiple fly-bys are recorded, only one state should be selected to characterise the trajectory. Two options:
first encounter
worst encounter
To select the worst encounter, the states need to be sorted:
Distance-driven the worst case is the one with the minimum distance from the planet
State-driven e.g. resonance > simple close approach e.g. Mars > Mercury
10
State characterisation: multiple fly-bys
-5 0 5
x 105
-6
-4
-2
0
2
4
6x 10
5
[km]
[
km
]
Evolution of one GAIA Fregat trajectory on the Earth’s b-plane for 100 years of propagation
1
2
3
Consecutive fly-bys
RESULTS
11
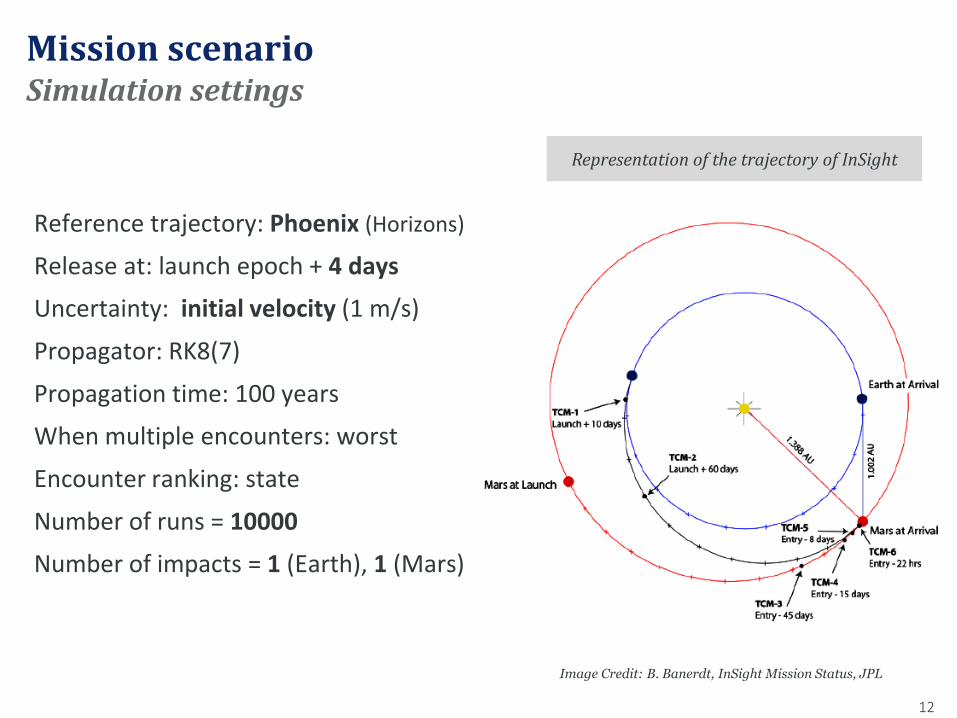
Mission scenario
Reference trajectory: Phoenix (Horizons)
Release at: launch epoch + 4 days
Uncertainty: initial velocity (1 m/s)
Propagator: RK8(7)
Propagation time: 100 years
When multiple encounters: worst
Encounter ranking: state
Number of runs = 10000
Number of impacts = 1 (Earth), 1 (Mars)
12
Simulation settings
Representation of the trajectory of InSight
Image Credit: B. Banerdt, InSight Mission Status, JPL
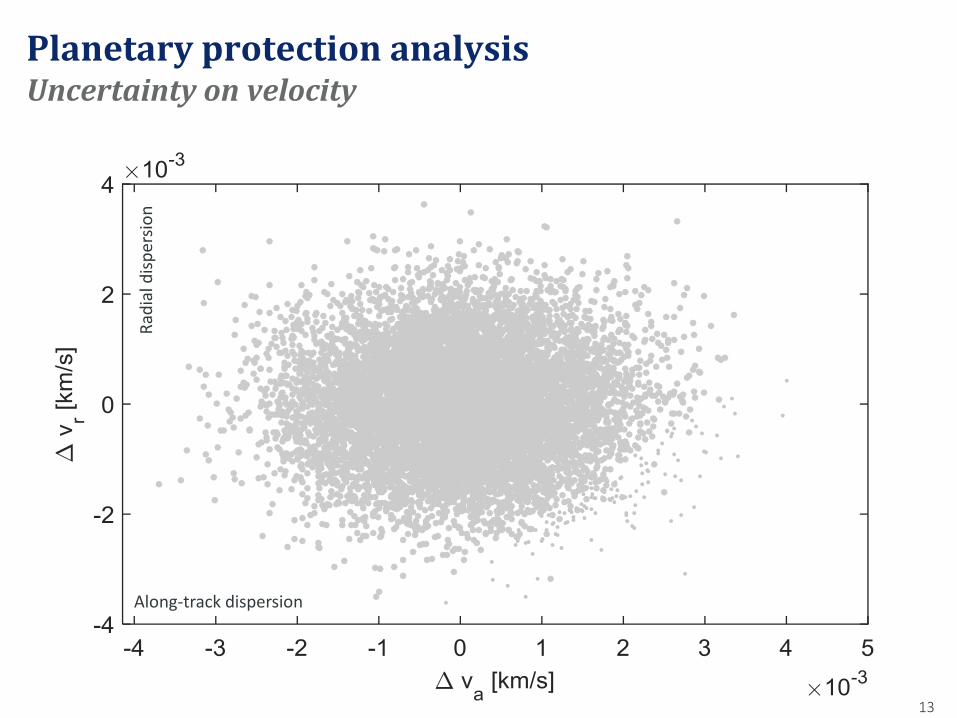
Planetary protection analysis
13
Uncertainty on velocity
Along-track dispersion
Rad
ial d
isp
ersi
on
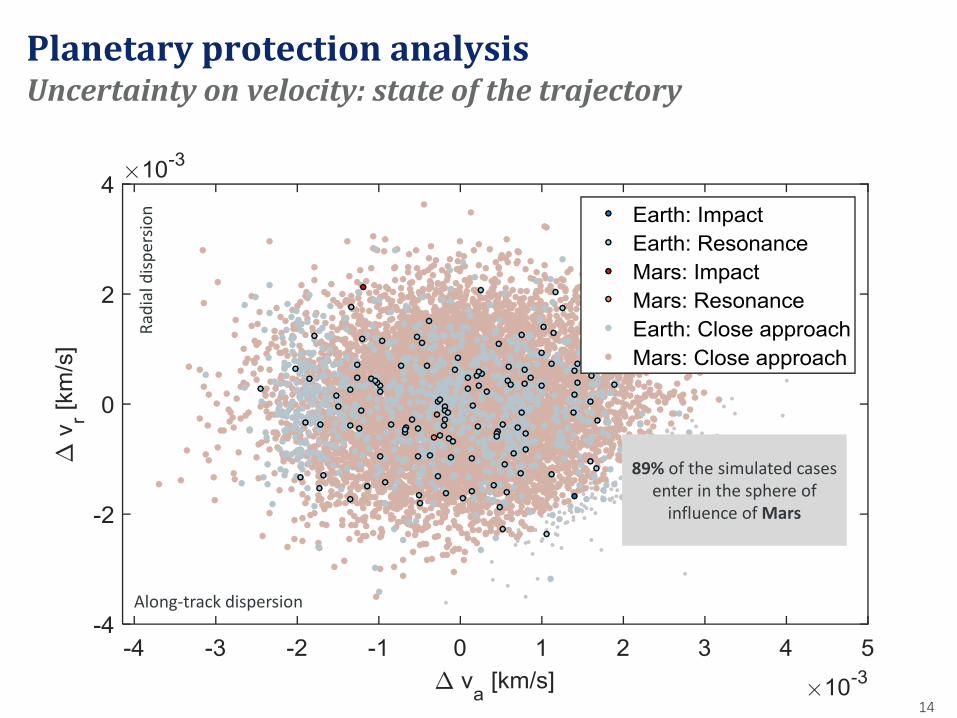
Planetary protection analysis
14
Uncertainty on velocity: state of the trajectory
Along-track dispersion
Rad
ial d
isp
ersi
on
89% of the simulated cases enter in the sphere of
influence of Mars
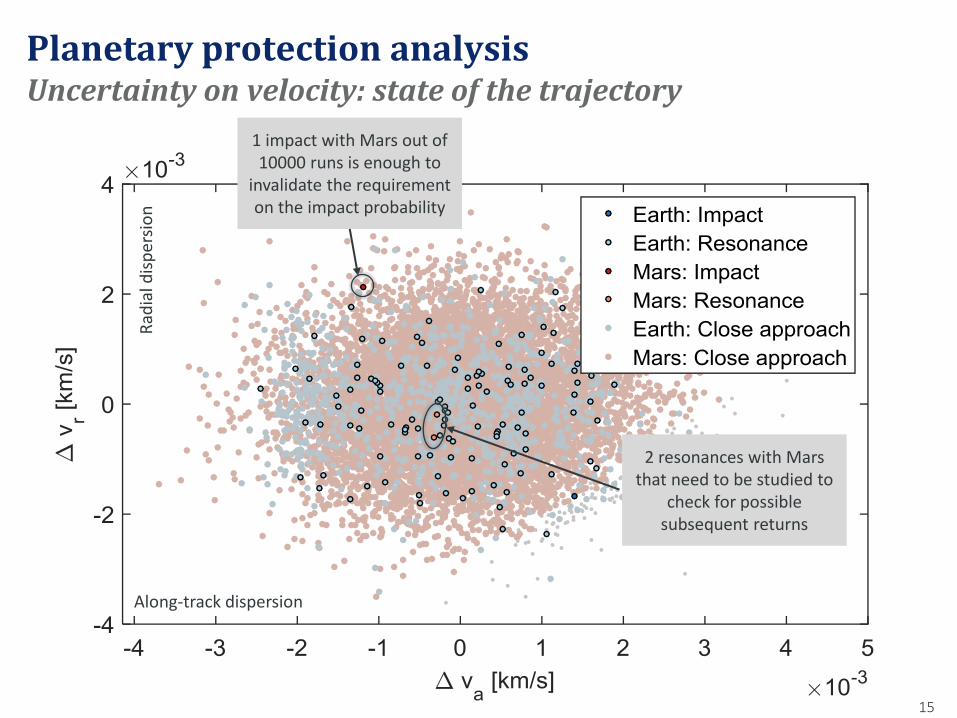
Planetary protection analysis
15
Uncertainty on velocity: state of the trajectory
Along-track dispersion
Rad
ial d
isp
ersi
on
1 impact with Mars out of 10000 runs is enough to
invalidate the requirement on the impact probability
2 resonances with Mars that need to be studied to
check for possible subsequent returns
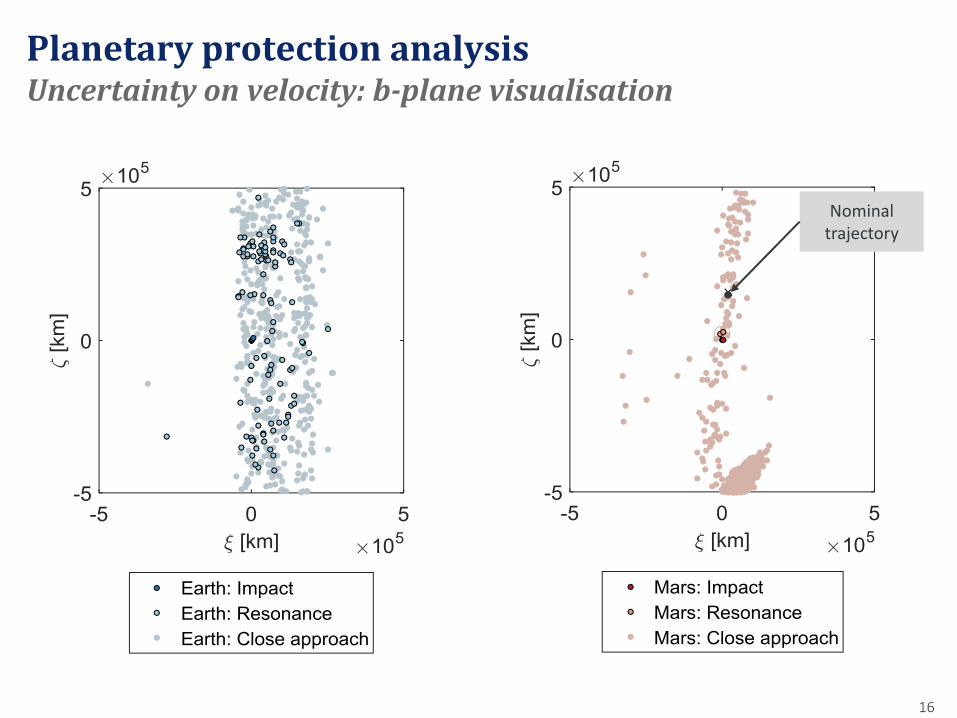
Planetary protection analysis
16
Uncertainty on velocity: b-plane visualisation
Nominal trajectory
Planetary protection analysis
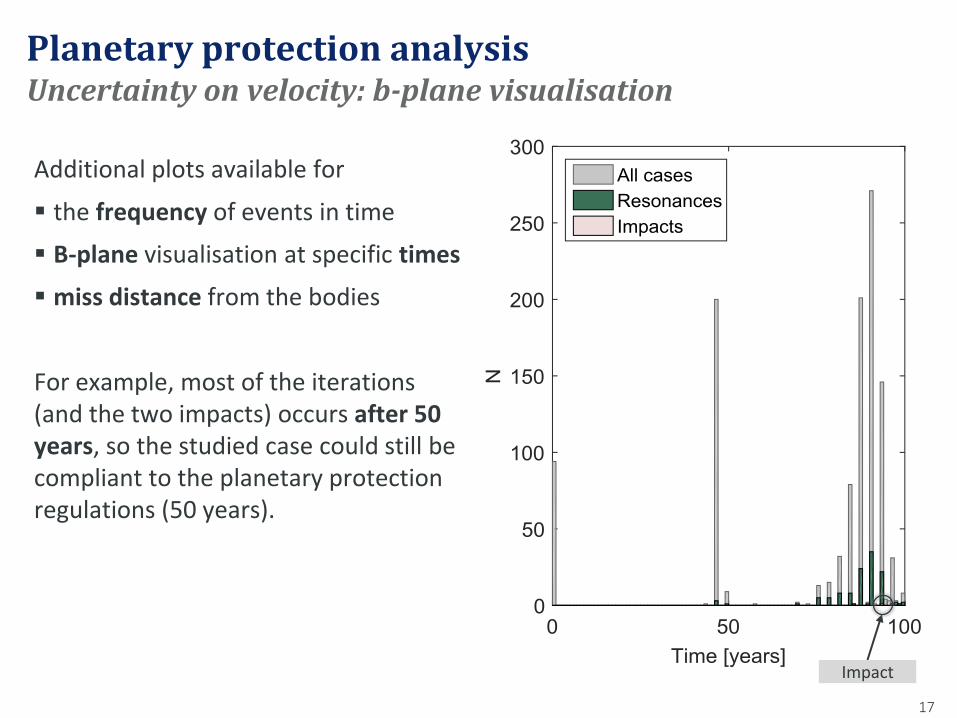
Additional plots available for
the frequency of events in time
B-plane visualisation at specific times
miss distance from the bodies
For example, most of the iterations (and the two impacts) occurs after 50 years, so the studied case could still be compliant to the planetary protection regulations (50 years).
17
Uncertainty on velocity: b-plane visualisation
Impact
Mission scenario
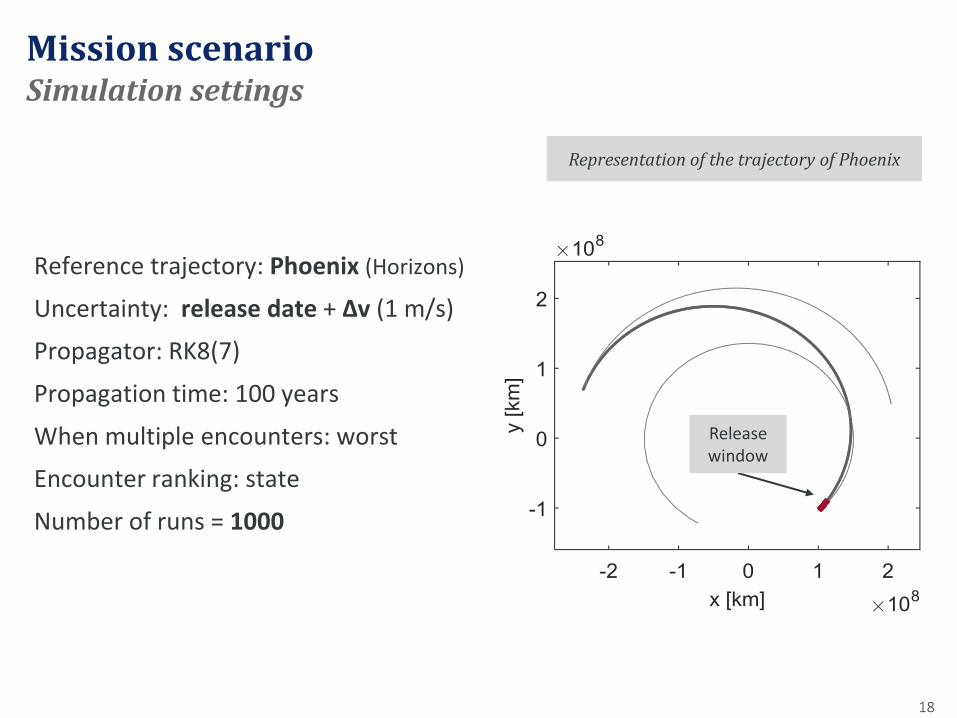
Reference trajectory: Phoenix (Horizons)
Uncertainty: release date + Δv (1 m/s)
Propagator: RK8(7)
Propagation time: 100 years
When multiple encounters: worst
Encounter ranking: state
Number of runs = 1000
18
Simulation settings
Representation of the trajectory of Phoenix
Release window
Mission analysis
0
10
20
30
40
50
60
70
80
90
Nu
mb
er
of
case
s
Release time after launch [hours]
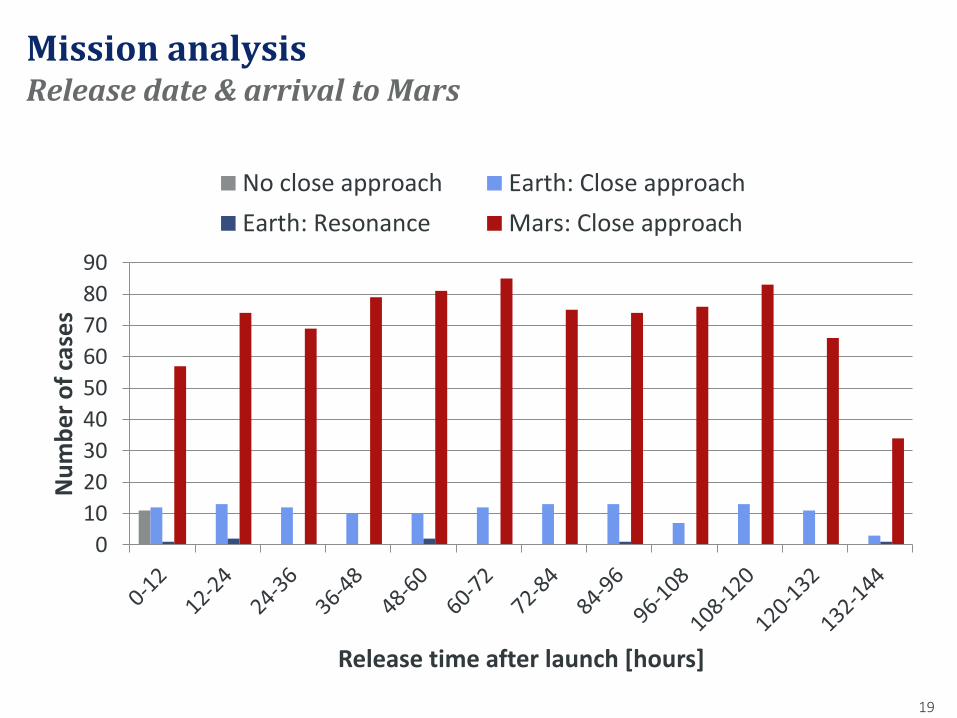
No close approach Earth: Close approach
Earth: Resonance Mars: Close approach
19
Release date & arrival to Mars
Mission analysis
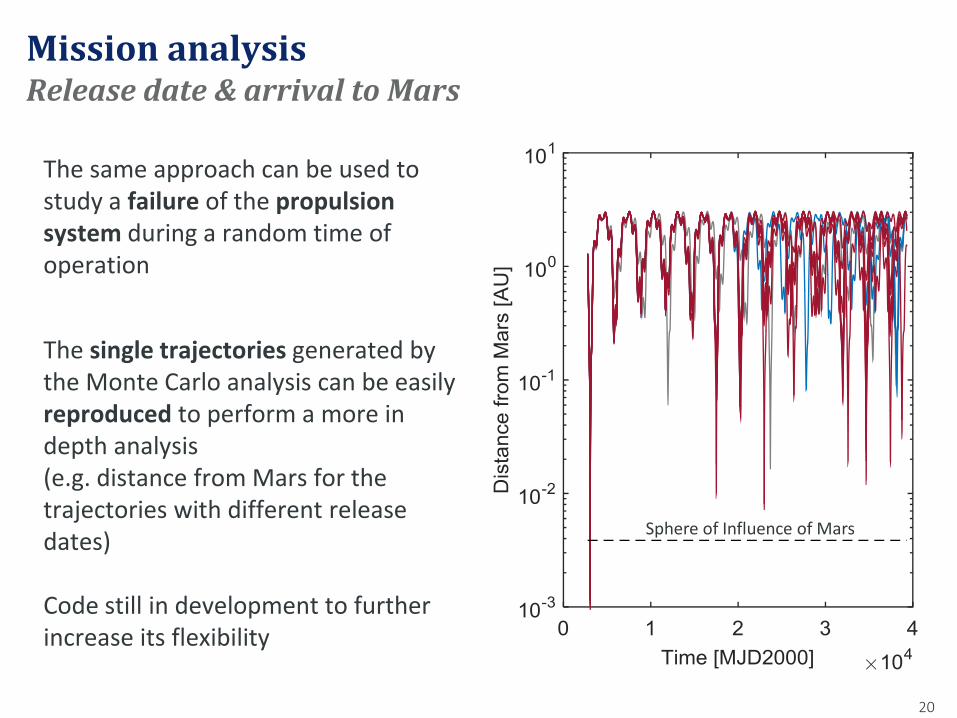
The same approach can be used to study a failure of the propulsion system during a random time of operation
The single trajectories generated by the Monte Carlo analysis can be easily reproduced to perform a more in depth analysis (e.g. distance from Mars for the trajectories with different release dates) Code still in development to further increase its flexibility
20
Release date & arrival to Mars
Sphere of Influence of Mars
Conclusions
Launchers and spacecraft used for interplanetary missions and missions to the Lagrangian points may be inserted in trajectory that will impact a celestial body. Need to estimate their compliance with planetary protection requirements.
A new tool, SNAPPshot, was developed for this purpose. A Monte Carlo analysis is performed considering the dispersion of the initial condition and of other parameters.
Each run is characterised by studying the close approaches through the b-plane representation to detect conditions of impacts and resonances.
The method can be applied to study the compliance with planetary protection requirements for interplanetary CubeSats considering the uncertainty on the initial condition.
Flexible tool: applicability can be extended to the robust design of missions or to the study of swarms of CubeSats.
21
Questions?
Francesca Letizia Astronautics Research Group Faculty of Engineering and the Environment University of Southampton
Numerical analysis of the compliance of interplanetary CubeSats with planetary protection requirements
The present study was funded by the European Space Agency through the contract 4000115299/15/D/MB, Planetary Protection Compliance Verification Software. Technical Responsible University of Southampton: Camilla Colombo, [email protected]