numerical analysis of tuned liquid dampers - kamalendu ghosh (09ce3112)
TRANSCRIPT

Numerical Analysis of Tuned Liquid Dampers
A thesis submitted to
Indian Institute of Technology, Kharagpur
In partial fulfillment for the award of the degree
of
Master of Technology in Civil Engineering
With specialization in
Structural Engineering
by
Kamalendu Ghosh (09CE3112)
Under the supervision of
Professor Arghya Deb
Department of Civil Engineering
Indian Institute of Technology Kharagpur
Kharagpur-721302, India
May 2014

i
DEPARTMENT OF CIVIL ENGINEERING
INDIAN INSTITUTE OF TECHNOLOGY
KHARAGPUR-721302
CETRIFICATE
This is to certify that the thesis entitled, “Numerical Analysis of Tuned Liquid Dampers” is a
bonafide record of authentic work carried out by Kamalendu Ghosh under my supervision and
guidance for the partial fulfillment of the requirement for the award of the degree of Master of
Technology in Structural engineering in the department of civil engineering at the Indian Institute of
Technology, Kharagpur.
The results embodied in this thesis have not been submitted to any other University or Institute for
the award of any degree or diploma.
Date: 02-05-2014
Place: Kharagpur
Dr. Arghya Deb
Associate Professor
Department of Civil Engineering
IIT Kharagpur
Kharagpur-721302

ii
Acknowledgement
With great pleasure and deep sense of gratitude, I express my indebtedness and profound gratitude
to Dr. Arghya Deb, Department of Civil Engineering, Indian Institute of Technology, Kharagpur
for his valuable guidance and constant encouragement at each and every step, from beginning of
this work. He exposed me to the research topic through proper counsel and rigorous discussions
and showed great interest in providing timely support and suitable suggestions.
I wish to convey my heartfelt thanks to all my friends for their encouragement and moral support
during the course of my project work.
Last but not the least I owe a great deal of indebtedness to my father who has been supporting me
throughout and is my greatest source of inspiration, strength and assurance.

iii
CONTENTS
1. INTRODUCTION ........................................................................................................... 1
1.1 PROBLEM DESCRIPTION ..................................................................................... 1
2. LITERATURE SURVEY ............................................................................................... 2
3. OBJECTIVES ................................................................................................................. 4
4. THEORETICAL BACKGROUNDS AND METHODOLOGY.................................... 5
4.1 Theoretical background............................................................................................. 5
4.2 Numerical study ......................................................................................................... 9
4.2.1 The Finite Element Model ................................................................................. 10
4.3 Hydraulic jump upon introduction of baffle .......................................................... 14
4.4 White noise ............................................................................................................... 14
5. VALIDATION ............................................................................................................... 15
5.1 Validation with displacement base excitation ......................................................... 15
5.2 Validation with rotational excitation ...................................................................... 15
6. RESULTS ...................................................................................................................... 17
6.1 Adoption of parameters to measure damping ........................................................ 18
6.2 Effect of mass of fluid in TLD on the damping parameters ................................... 19
6.3 Effect on damping due to introduction of baffle ..................................................... 22
6.3.1 Varying the location of the baffle with r=0.15m and A/L=0.01m .................... 23
6.3.2 Varying the amplitude of excitation with baffle location d=0 and r=0.15m .... 25
6.3.3 Varying the dimension of the baffle with location at d=0 and A/L=0.01 ......... 25
6.4 Effect on damping due to introduction of rectangular baffle................................. 27
6.5 FFT analysis on the response of the TLDs with baffles with white noise excitation
........................................................................................................................................ 30
6.5.1 Spectral width parameter ................................................................................. 31
6.6 Response to El-Centro and Koyna excitations ........................................................ 33
7. CONCLUSIONS ........................................................................................................... 35
8. REFERENCES .............................................................................................................. 36

iv
LIST OF TABLES
TABLE 1. PROPERTIES OF STRUCTURE ................................................................................... 12
TABLE 2. DIMENSIONS OF THE TANKS USED IN PRESENT STUDY .............................................. 17
TABLE 3. SPECTRAL WIDTH PARAMETERS FOR DIFFERENT TLD TYPES ................................... 32
TABLE 4. PERFORMANCE TO EL-CENTRO EXCITATION ........................................................... 34
TABLE 5. PERFORMANCE TO KOYNA EXCITATION ................................................................. 34
LIST OF FIGURES
FIGURE 1. SDOF STRUCTURE WITH TLD ATTACHED ON TOP ................................................... 5
FIGURE 2. SCHEMATIC SKETCH OF TLD MOTION ..................................................................... 7
FIGURE 3. THE MODIFIED TANK ............................................................................................ 13
FIGURE 4. THE STRUCTURE WITH TLD IN THE EULERIAN DOMAIN ......................................... 13
FIGURE 5. TIME HISTORY PLOT OF FREE SURFACE ELEVATION ON OUTER WALL OF A
RECTANGULAR TANK..................................................................................................... 15
FIGURE 6. TIME HISTORY OF FREE SURFACE ELEVATION ON THE RIGHT WALL OF THE TANK .... 16
FIGURE 7. EFFECT OF MASS A/L 0.01 .................................................................................... 20
FIGURE 8. EFFECT OF MASS A/L 0.02 .................................................................................... 20
FIGURE 9. EFFECT OF MASS A/L 0.03 .................................................................................... 21
FIGURE 10. TIME HISTORY OF DISPLACEMENT OF THE STRUCTURE WITH A CONCENTRATED LOAD
EQUAL TO THE WEIGHT OF THE TLD (M=0.1) AND THE STRUCTURE WITHOUT ANY LOAD. 22
FIGURE 11. TLD WITH SEMICIRCULAR BAFFLE ...................................................................... 23
FIGURE 12. EFFECT ON DAMPING PARAMETER D1 UPON INTRODUCTION OF BAFFLES ............... 24
FIGURE 13. EFFECT ON DAMPING PARAMETER D2 UPON INTRODUCTION OF BAFFLES ............... 24
FIGURE 14. EFFECT ON DAMPING PARAMETER D3 UPON INTRODUCTION OF BAFFLES ............... 24
FIGURE 15. EFFECT OF AMPLITUDE OF EXCITATION UPON DAMPING WITH BAFFLE................... 25
FIGURE 16. EFFECT ON DAMPING PARAMETER D1 UPON VARYING THE DIMENSION OF THE
BAFFLE ......................................................................................................................... 26
FIGURE 17. EFFECT ON DAMPING PARAMETER D2 UPON VARYING THE DIMENSION OF THE
BAFFLE ......................................................................................................................... 26
FIGURE 18. EFFECT ON DAMPING PARAMETER D3 UPON VARYING THE DIMENSION OF THE
BAFFLE ......................................................................................................................... 26
FIGURE 19. TLD WITH RECTANGULAR BAFFLE ...................................................................... 28
FIGURE 20. COMPARISON OF PERFORMANCE OF D1 BETWEEN RECTANGULAR BAFFLE AND
SEMICIRCULAR BAFFLE .................................................................................................. 28
FIGURE 21. COMPARISON OF PERFORMANCE OF D2 BETWEEN RECTANGULAR BAFFLE AND
SEMICIRCULAR BAFFLE .................................................................................................. 29
FIGURE 22. COMPARISON OF PERFORMANCE OF D2 BETWEEN RECTANGULAR BAFFLE AND
SEMICIRCULAR BAFFLE .................................................................................................. 29
FIGURE 23. APPLIED WHITE NOISE EXCITATION ..................................................................... 31

v
FIGURE 24. AUTOCORRELATION OF THE APPLIED WHITE NOISE SIGNAL .................................. 31
FIGURE 25. FFT ANALYSIS ................................................................................................... 32

vi
ABSTRACT
The next generation of tall structures are being designed to be lighter and more flexible, making
them susceptible to wind, ocean waves and earthquake type of excitations. One approach to
vibration control of such systems is through energy dissipation using a liquid sloshing damper.
Previous studies have shown that the TLD is most effective for a narrow band of frequency of
excitation. The purpose of this study is the numerical analysis of tuned liquid dampers with
the main objective of investigating the effect of mass of fluid on damping and devising methods
of increasing the effectiveness of Tuned Liquid Dampers over a wider range of excitation
frequencies.
In order to establish the effect of mass of fluid, numerical analysis was carried using the
ABAQUS finite element code using the coupled Eulerian-Lagrangian approach. Different
instances of the TLD was created each having different mass but tuned to the structural
frequency. Investigations were carried out by exciting the damped structure to different
excitations.
In order to increase the effectiveness of TLD over a broader spectrum of excitations baffles
were introduced into TLD. The structure with the modified TLD s were also excited to different
excitations. FFT analysis on the time history response of TLD with baffles to white noise
excitation was done to investigate the increase in effectiveness of TLD.

1
1. INTRODUCTION
The current trend of building structures of ever increasing height and the use of lightweight,
high strength material is often accompanied by increasing susceptibility to excitations such as
wind, ocean waves and earthquakes. To reduce the risk of structural failures, particularly during
a catastrophic event, it has become important to search for practical and effective devices for
suppression of these vibrations.
The devices used for suppressing the structural vibrations can be categorized according to their
energy consumption:
Passive Control
Active and Semi-active control
Hybrid system control system.
Passive control devices are systems that do not require external energy supply. Examples of
such systems include viscous dampers, tuned mass dampers, tuned liquid dampers, etc.
In TLDs the sloshing motion of the fluid that results from the vibration of the structure
dissipates a portion of the energy released by the dynamic loading and therefore increases the
equivalent damping of the structure. Tuned sloshing dampers can be classified into two
categories, shallow and deep water dampers based on the ratio of water depth to tank length in
the direction of motion. The TLD system relies on the sloshing wave developed at the free
surface of the liquid to dissipate a portion of the dynamic energy. The growing interest in TLDs
is due to their low capital and maintenance cost and their ease of installation in structures.
1.1 PROBLEM DESCRIPTION
TLDs are most effective only for a narrow frequency range of excitation. The damping due to
TLDs is highest when the excitation frequency is close to the tuned frequency. The main
purpose of this study is to devise methods to increase the effectiveness of TLD over a wider
band of frequencies of excitation. The effect of mass of damper on damping is also studied
here. It has also been attempted to devise parameters to quantify damping for any excitation.

2
2. LITERATURE SURVEY
Passive damping using TLDs is a challenging area of research and innovation and as such a
host of literature which covers this diverse area exists. Some references are summarized here
with a gist of their content.
Reed et al. (1998) concluded that the dissipation of vibration energy due to a TLD increases as
the excitation amplitude increases and the TLD behaves as hardening spring system. The
authors also said that to achieve a more robust system the design frequency for the damper, if
it is computed by the linearized wave theory, should be set at a value lower than that of the
structure response frequency, since this may result in the actual nonlinear frequency of the
damping matching the structural response. The authors also found that even if there damper
frequency is mistuned slightly, the TLD always performs well. They observed no adverse
effects due to slight mistuning.
Jin-Kyu et al. (1999) discusses the numerical modeling of a tuned liquid damper (TLD) as an
equivalent tuned mass damper with non-linear stiffness and damping. This non-linear stiffness
and damping (NSD) model captures the behavior of the TLD system adequately under a variety
of loading condition. In particular, NSD model incorporates the stiffness hardening property of
the TLD under a large amplitude excitation.
Yamamoto & Kawahar [16] considered a fluid model using Navier-Stokes equation in the form
of the arbitrary Lagrangian-Eulerian (ALE) Formulation. For the discretization of the
incompressible Navier-Stokes equation, they used the improved-balancing-tensor-diffusivity
method and the fractional-step method for computational stability.
Sun et al. (1992) proposed a nonlinear model for rectangular Tuned Liquid Damper. This model
utilizes the shallow water wave theory and is extended to account for the effect of breaking
waves by the introduction of two empirical coefficients determined experimentally.
Kareem et al. (2009) elaborated on the inherent non-linear behavior of the TLDs. The non-
linear behavior of the TLDs is characterized by an amplitude dependent frequency response
function, which translates into changes in frequency, as well as changes in the damping due to
sloshing, with amplitude. In this paper TLDs are modeled using a sloshing-slamming (S2)
analogy, which combines the dynamic effect of liquid sloshing and slamming/impact.

LITERATURE SURVEY
3
Banerji [3] conducted experimental and analytical analysis on a structure with TLD and
concluded that a 4% mass ratio and a 0.15 depth ratio enabled a TLD to be most effective for
broad-banded ground motion. This optimal TLD can reduce the response of a SDOF structure
typically by about 30%, which is sufficient from a design point of view.
Modi et al. [11] investigated on enhancing the energy dissipation efficiency of a rectangular
liquid damper through introduction of two dimensional wedge shaped obstacles. From the
experiment he concluded that wedging increases damping factor and damping factor further
increases for a roughened wedge.
Modi and Munshi [12] conducted parametric study with rectangular sloshing dampers in the
presence of semi-circular obstacles and wind tunnel tests and observed higher damping over
an extended range of frequencies.

4
3. OBJECTIVES
This project is confined to the investigations on a shallow water TLD.
The objectives of this project are:
i. Investigation into the effect of mass ratio on damping of a shallow TLD.
ii. Investigate into the performance of a shallow TLD with varying the non-dimensional 𝐴
𝐿
1 ratio and frequency of excitation.
iii. Devise parameters to quantitatively measure the effectiveness of TLDs.
iv. Enhance the performance of TLD over a wider spectrum of frequency of excitation with
the use of baffles.
1 A= amplitude of excitation, L=length of the tank in the direction of liquid sloshing

5
4. THEORETICAL BACKGROUNDS AND METHODOLOGY
4.1 Theoretical background
Figure 1. SDOF structure with TLD attached on top
The structure and the TLD can be modelled as a classical single degree of freedom system as
shown in Fig. 1. This system when subjected to a ground motion characterized by ground
acceleration ag, the equation of motion of the structure is written as:
( )s wm m sx
+ sc sx
+ ( )s s s w gk x m m a F
(1)
where sm , wm , sk , sx and sc represent mass of the structure, mass of water, stiffness, relative
displacement of the lumped mass with respect to the ground and damping coefficient of the
structure respectively. Eq. (1) can also be written as:
sx
+ 2 s s sx
+ 2
s sx g
s w
Fa
m m
(2)

6
where s and s are the structural damping and circular frequency respectively. The TLD base
shear force F is the hydrodynamic force induced by liquid sloshing which is calculated from
the shallow-water wave theory.

THEORETICAL BACKGROUNDS AND METHODOLOGY
7
2 21[ ]
2r lF gb h h (3)
where =density of liquid, b = breadth of tank, rh and rh are as shown in Fig. 2.
Figure 2. Schematic sketch of TLD motion
Shallow-water wave theory
The shallow-water wave theory is based on the depth-averaged equations of mass (equation of
continuity) and momentum conservation. This formulation assumes that the liquid is
incompressible and inviscid, and that the water depth is very small in comparison to the
characteristic length scale of motion. The equations of mass and momentum conservation are
0h u
t x
(4)
0
u uu g
t x x
(5)
where u =horizontal velocity, g =acceleration due to gravity, and h are as shown in Fig. 2.
The shallow-water wave propagates with a speed independent of its wavelength (non-
dispersive) but is dependent on its amplitude. The models which are based on non-dispersive
non-linear shallow-water wave equations can quite aptly model the wave breaking and energy
dissipation (Lamb 1932). This is the reason why shallow-water wave theory was selected to
model sloshing in a TLD.

THEORETICAL BACKGROUNDS AND METHODOLOGY
8
Basic TLD equations
The rigid TLD tank (Fig. 2) when subjected to horizontal base motion sx the equations of
sloshing are given by the continuity equation
0
u w
x z
(6)
and the two dimensional Navier Stokes equations:
2 2
2 2
1s
u u u p u uu w x
t x z x x z
(7)
2 2
2 2
1w w w p w wu w g
t x z z x z
(8)
( , , )u u x z t , ( , , )w w x z t are the velocities of liquid particles relative to tank in x and z
directions respectively and is the kinematic viscosity of the liquid. Based on shallow water
wave theory the velocity potential, is assumed to be
( , , ) ( , ) cosh( ( ))x z t F x t k h z (9)
where k is the wave number. The boundary conditions are
0u on the end walls ( )x a (10)
0w on the bottom ( z h ) (11)
w u
t x
on the free surface ( 0z ) (12)
op p on the free surface ( 0z ) (13)
When the governing differential equations are integrated with respect to z from tank bottom to
the free-surface, the following equations are obtained:
( )0
uh
t x
(14)
22
2(1 )H s
u uT u g gh u x
t x x x x
(15)
where tanh( ) / ( )kh kh , tanh( ( )) / tanh( )k h kh and tanh( ( ))HT k h . It should be
noted that in arriving these equations the viscosity term in the governing equations are dropped.
THEORETICAL BACKGROUNDS AND METHODOLOGY
9
The fundamental natural frequency of water sloshing predicted by linear water theory (Lamb
1932) is given by
1tanh
2w
g hf
L L
(16)
where L= length of tank in the direction of liquid sloshing, h
L= depth ratio
Shallow water and deep water TLD
In case of shallow water dampers h
L ratio is limited to 0.15, thus water depths required for
short period structures from the above equation are too small for practical application. The
frequency of sloshing is given by Eq. (16).
Fundamental frequency of deep water dampers (with h
L >1) is given by:
1
2w
gf
L
(17)
Thus the fundamental frequency of sloshing for deep water TLD is independent of the depth
ratio.
4.2 Numerical study
To study the objectives of the current study a numerical model of the set up was created using
the commercially available finite element code ABAQUS and several numerical simulations
were performed.
In TLDs, the motion of the liquid, especially at the free surface, can result in extreme
deformations. This will result in severe mesh deformation as well. This will cause the Jacobian
to become very small or even negative. A negative determinant of the Jacobian matrix would
cause the analysis to terminate. In order to prevent this, and to permit simulation of large
amplitude sloshing motions, a coupled Lagrangian-Eulerian approach was adopted.
THEORETICAL BACKGROUNDS AND METHODOLOGY
10
In contrast to a Lagrangian analysis, where the Lagrangian elements comprise a single material
only, in an Eulerian analysis the Eulerian elements may not always comprise of a single
material: many may be partially or filled with air i.e. void. The Eulerian material boundary
must, therefore, be computed during each time increment and generally does not correspond to
an element boundary. The recomputed material boundaries must ensure conservation of mass,
momentum and energy.
In addition, the nodes in an Eulerian finite element mesh are fixed in space, unlike in the
Lagrangian case where the nodes move with the material. The Eulerian mesh is typically a
simple rectangular grid of elements constructed to extend well beyond the Eulerian material
boundaries, giving the material space in which to move and deform. If any Eulerian material
moves outside the Eulerian mesh, it results in loss of mass from the simulation, and in the
present application at least, in accurate results.
Unlike the liquid in the tank, the tank and its walls undergo limited motions. A Lagrangian
finite element analysis is therefore adopted for these parts. But at the liquid structure interface,
it is necessary to reconcile the two different formulations through Eulerian-Lagrangian
Contact. In this approach, at the interface the liquid motion results in traction forces at the
boundary of the solid, while the displacements of the solid result in displacement or velocity
boundary conditions for the liquid.
The TLD was therefore modeled using the coupled Eulerian-Lagrangian capability in
ABAQUS/Explicit.
4.2.1 The Finite Element Model
4.2.2.1 The Liquid
The water was modelled using EC3D8R Eulerian elements and a linear Us-Up equation of state
(EOS) material. In a linear Us-Up material the bulk modulus K is calculated as
2
0K c (18)
where is the density of water and 0c is the speed of sound in liquid. Since water is
incompressible, its bulk modulus is calculated using Eq. (18) is very high. This is a problem,

THEORETICAL BACKGROUNDS AND METHODOLOGY
11
since in an explicit time integration algorithm the stable time increment is inversely
proportional to material bulk moduli. As a consequence, the stable time increment for the
analysis becomes excessively small resulting in unrealistically high solution times, given the
computational resources available. To ensure practical turnaround times for the analysis, 0c
was not taken as its actual value of 1460 ms-1. Instead, a reduced value of two orders of
magnitude smaller was used for simulations. This reduced the bulk modulus of the liquid,
thereby increasing the stable time increment and allowing the simulations to be completed in a
realistic time frame. Similar strategies adopted by other authors for coupled Eulerian-
Lagrangian analysis have substantiated little significant difference in the results. Though the
analytical formulations of linear sloshing theory described in Section 4.1 assumes the liquid to
be incompressible, the reduction in bulk density results in the introduction of slight
compressibility to the fluid. But as the comparison with the benchmark solutions described in
Chapter 5 indicate, this does not appear to be making any significant difference to the results.
A small viscosity of magnitude of 1.E-5 2N sm was also added in order to damp out high
frequency noise in the numerical solution, despite the assumption that the water is inviscid.
Again, the comparisons with the benchmark solutions indicate no significant difference in
result.
4.2.2.2 The Tank
The tank was modelled using C3D8R solid elements and were converted to rigid bodies to save
computational time, since deformation of the tank and its walls do not significantly affect the
sloshing motion.
4.2.2.3 Interactions
The penalty method is used to enforce contact between the Lagrangian solids and the Eulerian
liquid. In the penalty method, interpenetrations between two contacting surfaces are prevented
by penalty forces. The magnitude of penalty forces depend on the magnitude of penetration.
The penalty stiffness, if adequately chosen, prevents interpenetration between the contacting
parts.
The sloshing motion of the liquid will result in impact between the liquid and the tank walls.
Hence, contact between the Eulerian liquid material and the solid parts were enforced using the
penalty contact based General Contact capability in ABAQUS/Explicit. The contact penalties

THEORETICAL BACKGROUNDS AND METHODOLOGY
12
were the default penalties calculated by ABAQUS, which are the maximum possible penalty
stiffness values that can be used without further reducing the stable time increment.
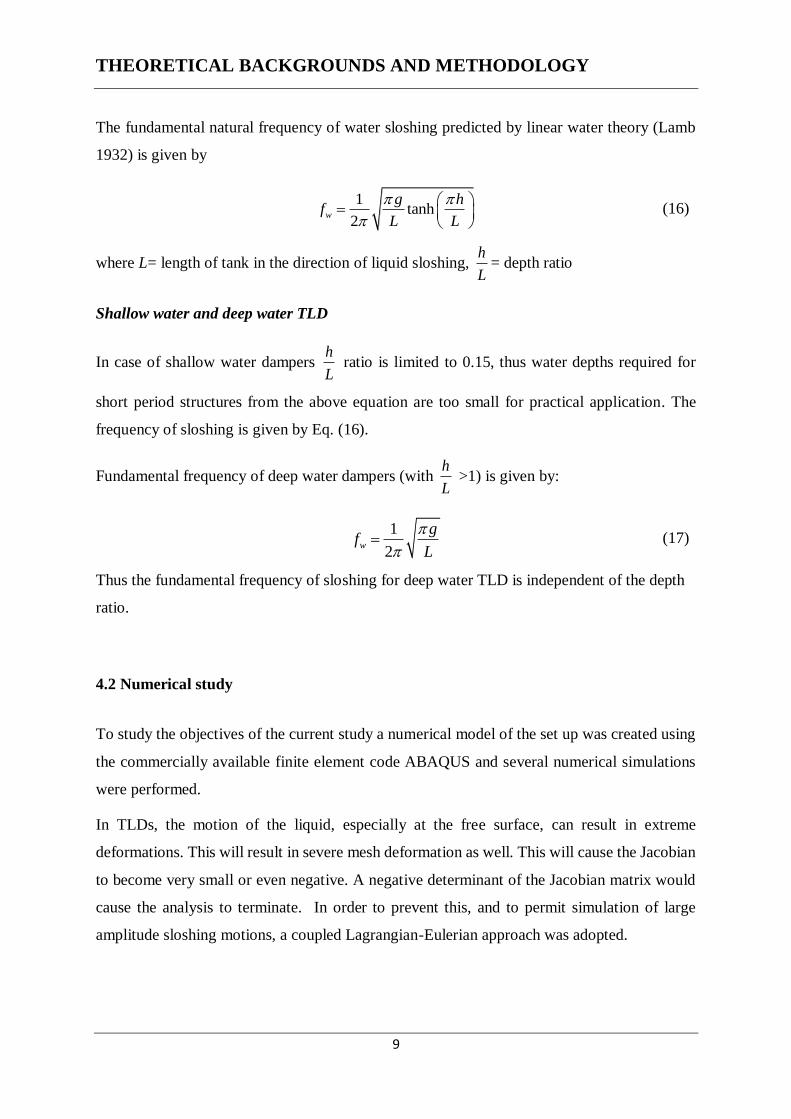
4.2.2.4 Modifications
Leakage of the liquid from the tank was witnessed during initial simulations of the TLD under
gravity load. Several modifications were incorporated to minimize such undesirable leakages.
Fillets were added to the sharp corners of the tank walls and additional layers of tank walls
were introduced. Fillets helped remove the singularity in the surface normal at sharp corners in
the tank walls, while additional layers of tank walls provided the extra contacting surfaces that
trapped any leaked material, thereby “blocking” the leaks and limiting escape of any further
material from the tank.
4.2.2.5 The Structure
A single bay portal frame chosen as the structure for all the analysis with TLD was modeled
using 2-D beam elements. The dimensions and other data of the structure are shown in Table
1.
Table 1. Properties of structure
Length of beam 10 m
Length of columns 25m
Cross-sectional area
Beam 0.3m x 0.3m
Column 0.8m x 0.8m
Density 2400kg m-3
Weight of the structure 78.96 ton
THEORETICAL BACKGROUNDS AND METHODOLOGY
13
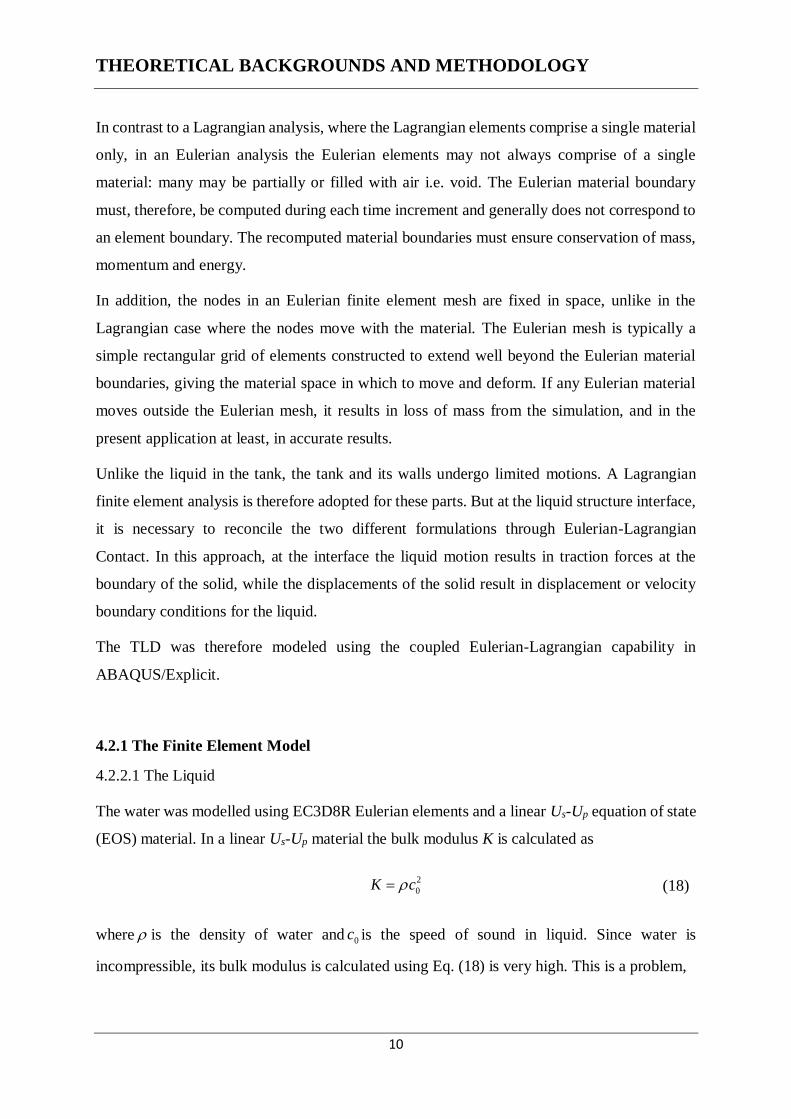
Figure 3. The modified tank
Figure 4. The structure with TLD in the Eulerian domain

THEORETICAL BACKGROUNDS AND METHODOLOGY
14
4.3 Hydraulic jump upon introduction of baffle
A baffle at the bottom of the tank may contribute to additional energy dissipation by inducing
a hydraulic jump at the location of the baffle. Modi and Munshi [12] tested this idea with a
baffle of semi-circular cross section.
4.4 White noise
Excitation of a structure using white noise for system identification is widely quoted in
literature. Kondo and Hamatoto [10] illustrates a similar use.
White noise is a random signal with constant power spectral density. It also refers to a discrete
signal whose samples are regarded as a sequence of uncorrelated random variables with zero
mean and finite variance. The samples are independent and have the same probability
distribution. If each sample has a normal distribution with zero mean, the signal is said to be
Gaussian white noise.

15
5. VALIDATION
The numerical model was validated by solving two well-known benchmark problems. The
results obtained were compared with those obtained by Nakayama [13] and Biswal [4]. The
ABAQUS manual contains a solution for the problem solved by Nakayama, but it uses the ALE
(Arbitrary Lagrangian Eulerian) procedure for the solution. The solution obtained using the
current Coupled Eulerian Lagrangian procedure compared well with the ALE results as well.
5.1 Validation with displacement base excitation
To validate the numerical model, sloshing behavior of liquid in a partially filled rectangular
tank was investigated under sinusoidal base excitation. The same problem was investigated by
Nakayama et al. (1981) [13] using boundary element method and by Biswal et al. (2003) [4]
by finite element method. For the benchmark study, a rectangular tank with 0.9m base width
and filled with liquid up to 0.6m was considered under sinusoidal horizontal base acceleration
of 2
0 sin( )x x t in the X direction. The values of ox and were taken as 0.002m and
5.5 rad/sec respectively, as considered by the studies of Nakayama et al. and Biswal et al.
Figure 5. Time history plot of free surface elevation on outer wall of a rectangular tank
5.2 Validation with rotational excitation
ABAQUS Benchmark Problem
-80
-60
-40
-20
0
20
40
60
0 2 4 6 8 10
He
igh
t o
f w
ave
( m
m)
Time (s)
Present Nakayama Biswal

VALIDATION
16
A rigid tank measuring 90 x 80 x 60 cm initially inclined 0.8 degrees with respect to the y-axis
and filled with water up to a height of 60 cm, was rotated abut a point midway at water surface
between the two tank walls. The applied rotation was:
0.01396cos(5.5 )t (19)
The slosh height on the right wall of the tank was compared to numerically obtained reference
solution given by Nakayama and Washizu (1980).
Figure 6. Time history of free surface elevation on the right wall of the tank
-6.00E-02
-4.00E-02
-2.00E-02
0.00E+00
2.00E-02
4.00E-02
6.00E-02
8.00E-02
0 2 4 6 8 10 12 14
Hei
ght
of
wav
e (m
m)
Time (s)
Nakayama and Washizu Current Study

17
6. RESULTS
The first eigen frequency of the structure was computed. With the objective of studying the
effect of mass of the fluid in the TLD four different tanks with different masses tuned to the
structural frequency were designed by varying the depth ratio (Eq. (16)).
Table 2. Dimensions of the tanks used in present study
Mass ratio Length of the tank (L) Height of water (h) ℎ
𝐿
0.0122 1.5 m 0.110m 0.073
0.02931 2.0 m 0.192m 0.096
0.05829 2.5 m 0.305m 0.122
0.10000 3.0 m 0.450m 0.150
TLD s with different masses tuned to the same structural frequency could also have been set
up by changing the density of fluid in the tank. However changing the density of the fluid
would require using a fluid other than water in the tank. Hence this is not desirable.
Dynamical systems subjected to sinusoidal excitations shows sinusoidally varying steady state
response. In the presence of damping, the amplitude of the response is considerably smaller
than the response of the undamped system. The damped response for such excitations can be
easily computed using parameters such as the deformation response factor Rd, the velocity
response factor Rv, and the acceleration response factor Ra where Rd is the dynamic
magnification factor ratio and Rv and Ra are defined in terms of Rd and the constant β as
follows:
Rv= βRd
Ra= β2Rd
However if the TLD is subjected to random excitation, the response is a combination of many
different frequencies. Hence the damping parameters defined above are not directly applicable.
Hence to quantify damping performance of TLDs, it becomes imperative to device alternative
parameters to measure the reduction in the response of damped system.
The advantage in a numerical simulation is that these parameters can be derived quantities –

RESULTS
18
they need not only be primary variables like displacement, velocity or acceleration which are
experimentally measurable and are therefore preferred in most experimental studies. One
derived quantity which is easily available as an output quantity in a numerical solution is the
energy of the system. If one can get some idea of the distribution of the total energy of the
system among its several components, and the manner in which this distribution evolves with
time, it may be possible to use these energy quantities as a measure of the extent of damping.
For example if one finds that the kinetic energy and internal energy of a component of a damped
system are substantially reduced from their benchmark value, one can reliably conclude that
the damping mechanism (e.g. a TLD) has been more effective in this case than in the
benchmark.
6.1 Adoption of parameters to measure damping
With the above objective in view, in the present work, three parameters are proposed to
measure the influence of damping. The first parameter is based on a primary variable, the
displacement of a point on the structure, while the other two are derived quantities and are
based on the energy of the system. The parameters are:
i. Percentage reduction in maximum absolute displacement (d1)
ii. Percentage reduction in total internal energy (d2)
iii. Percentage reduction in total kinetic energy (d3)
The parameters are defined by Eq. (20), Eq. (21) and Eq. (22) respectively.
The parameter d1 is a measure of the maximum deformation that the structure undergoes till
the termination of the excitation. Total internal energy is the total strain energy of the structure
during the excitation period. Total KE is the measure of the energy associated with velocity of
sway and can be a measure of the degree of discomfort experienced by the residents of the
structure.
The studies on the response of the structure with and without TLDs will be a test of the
effectiveness of these parameters in quantifying damping as well.

RESULTS
19
maxmax
1
max
100d d
dd
(20)
2 100
tottot
tot
IE IEd
IE
(21)
3 100
tottot
tot
KE KEd
KE
(22)
where, maxd = maximum absolute displacement of the undamped structure
maxd = maximum absolute displacement of the damped structure
totIE = time integral of internal energy into the undamped structure at the end of
excitation
tot
IE = time integral of internal energy into the damped structure at the end of
excitation
totKE = time integral of kinetic energy into the undamped structure at the end of
excitation
tot
KE = time integral of kinetic energy into the damped structure at the end of
excitation
6.2 Effect of mass of fluid in TLD on the damping parameters
Each TLD whose performance characteristics were to be measured were attached to the top of
the structure and subjected to sinusoidal excitations with varying frequency ratios (β) and non-
dimensional amplitudes of excitations ( ).
The value of λ was kept less than equal to 0.03 in order to confine sloshing within the zone of
“weak breaking”.[6]

RESULTS
20
𝜆 =
𝐴𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒 𝑜𝑓 𝑒𝑥𝑐𝑖𝑡𝑎𝑡𝑖𝑜𝑛
𝐿𝑒𝑛𝑔𝑡ℎ 𝑜𝑓 𝑡ℎ𝑒 𝑡𝑎𝑛𝑘 𝑖𝑛 𝑡ℎ𝑒 𝑑𝑖𝑟𝑒𝑐𝑡𝑖𝑜𝑛 𝑜𝑓 𝑙𝑖𝑞𝑢𝑖𝑑 𝑠𝑙𝑜𝑠ℎ𝑖𝑛𝑔 (23)
𝛽 =
𝐸𝑥𝑐𝑖𝑡𝑎𝑡𝑖𝑜𝑛 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑐𝑦
𝑇𝑢𝑛𝑒𝑑 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑐𝑦 (24)
The value of λ was of the parameters defined in the previous section.
Figure 7. Effect of mass A/L 0.01
Figure 8. Effect of mass A/L 0.02
-50
0
50
100
0.6 0.8 1 1.2 1.4
d1
frequency ratio-100
-50
0
50
100
0.6 0.8 1 1.2 1.4
d2
frquency ratio
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d3
frequency ratio
-20
0
20
40
60
80
100
0.6 0.8 1 1.2 1.4
d1
frequency ratio
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d3
frequency ratio
-100
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d2
frequency ratio

RESULTS
21
From the results in Fig. 7, Fig. 8 and Fig. 9, it can be concluded that the performance of the
damping parameters are consistent with each other for all excitation scenarios: an increase in
the maximum absolute displacement is accompanied by an increase in the kinetic energy as
well as in the internal energy. Thus the damping parameters defined above can be used as a
measure of damping.
The results also show that for all cases the TLDs are most effective at excitation frequencies
that are close to the natural frequency of the structure. However, the performance drops as the
value of β shifts from 1.0.
The effect of the mass of damper is also evident from the figures. Higher mass ensured
enhanced damping at β close to 1. But is the increase in the value of the damping parameters
with increased mass of damper truly due to increase in sloshing? In order to verify this, a
simulation where a gravity load equal in magnitude to the gravity load due to the additional
mass of the damper was applied to the top of the structure. The response of the structure with
the concentrated load, and that of the structure without concentrated load, showed no
difference. This clearly indicated that the increase in damping experienced by the structure with
increased fluid mass was due to fluid sloshing. (Fig. 10)
Figure 9. Effect of mass A/L 0.03
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d1
frequency ratio-100
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d2
frequency ratio
-50
0
50
100
150
0.6 0.8 1 1.2 1.4
d3
frequency ratio

RESULTS
22
It is however also clear from Fig. 7–9 that the effectiveness of TLDs with higher water mass
decrease as the excitation frequency shifts from the tuned frequency. Thus increase in fluid
mass results in an increase in the effectiveness of the TLD over a narrower range of excitation
frequencies.
Figure 10. Time history of displacement of the structure with a concentrated load equal to the
weight of the TLD (m=0.1) and the structure without any load.
6.3 Effect on damping due to introduction of baffle
As seen in Section 6.2 the tank with the highest mass ratio showed the best damping
characteristics at frequencies close to the natural frequency of the structure. However at
frequencies away from the natural frequency, there was significantly less damping. In an
attempt to improve the damping performance of this tank, two semicircular baffles of radii
0.15m and 0.2 m were introduced at the bottom of the tank. As mentioned in Section 4.3
previous research [12] indicates that a baffle at the bottom of the tank may contribute to
additional energy dissipation. The purpose of the simulations was to explore whether the
additional energy dissipation due to the baffle succeeds in extending the damping performance
of the TLD with the highest mass ratio over a wider frequency range.
Analysis were performed for three different baffle locations:
i. d = 0 ii. d = 0.25l iii. d = 0.50l,
where d = distance of the center of the baffle from the center of the tank and, l = 𝐿
2, L= 3m.

RESULTS
23
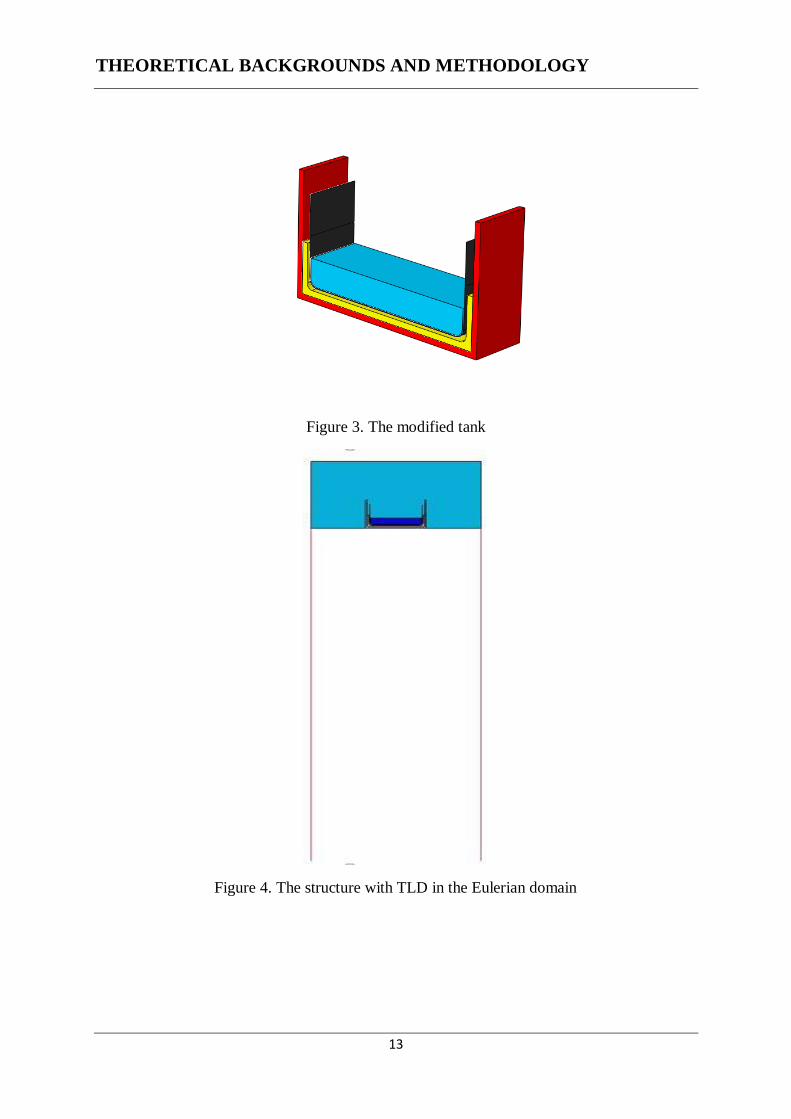
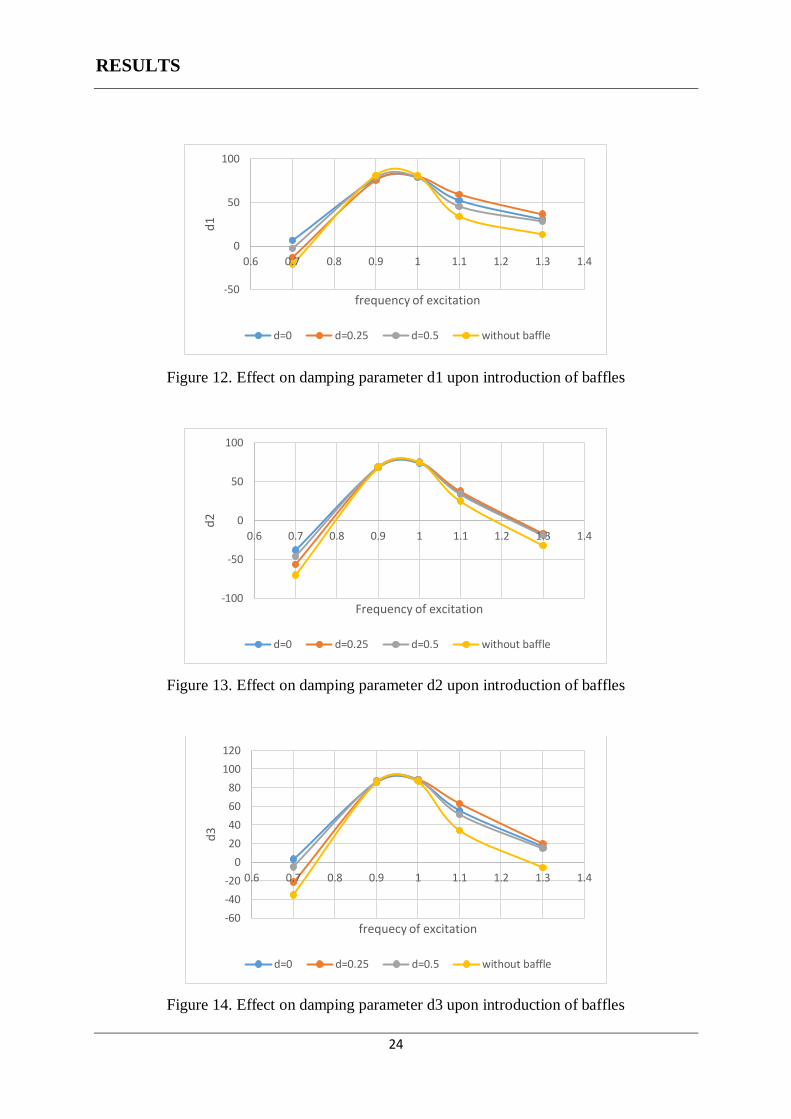
Fig. 11. shows the TLD with a semicircular baffle. Fig. 12-18 shows the performance of the
three damping parameters for this baffle for sinusoidal excitations as in the previous section.
Figure 11. TLD with semicircular baffle
The results are shown in the following sections.
6.3.1 Varying the location of the baffle with r=0.15m and A/L=0.01m
Fig. 12-14 illustrate the effect of varying the location of the baffle keeping the dimension and
the amplitude of excitation constant. . It was observed that while the performance for all the
three locations were nearly the same for frequency close to the tuned frequency, the TLD with
baffle at the center of the tank gave better results for other values of frequency ratio.
As Section 6.2, the performance of the damping parameters are again consistent with each other
for all excitation scenarios- an increase in the maximum absolute displacement is accompanied
by an increase in the kinetic energy as well as in the internal energy.
RESULTS
24
Figure 12. Effect on damping parameter d1 upon introduction of baffles
Figure 13. Effect on damping parameter d2 upon introduction of baffles
Figure 14. Effect on damping parameter d3 upon introduction of baffles
-50
0
50
100
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d1
frequency of excitation
d=0 d=0.25 d=0.5 without baffle
-100
-50
0
50
100
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d2
Frequency of excitation
d=0 d=0.25 d=0.5 without baffle
-60
-40
-20
0
20
40
60
80
100
120
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d3
frequecy of excitation
d=0 d=0.25 d=0.5 without baffle

RESULTS
25
6.3.2 Varying the amplitude of excitation with baffle location d=0 and r=0.15m
Increasing the amplitude of excitation increases the velocity of waves and hence increases
energy dissipation due to enhanced hydraulic jump.
∆d= 𝐷𝑎𝑚𝑝𝑖𝑛𝑔 𝑐𝑎𝑢𝑠𝑒𝑑 𝑏𝑦 𝑡ℎ𝑒 𝑇𝐿𝐷 𝑤𝑖𝑡ℎ 𝑏𝑎𝑓𝑓𝑙𝑒−𝐷𝑎𝑚𝑝𝑖𝑛𝑔 𝑐𝑎𝑢𝑠𝑒𝑑 𝑏𝑦 𝑡ℎ𝑒 𝑇𝐿𝐷 𝑤𝑖𝑡ℎ𝑜𝑢𝑡 𝑏𝑎𝑓𝑓𝑙𝑒
𝐷𝑎𝑚𝑝𝑖𝑛𝑔 𝑐𝑎𝑢𝑠𝑒𝑑 𝑏𝑦 𝑡ℎ𝑒 𝑇𝐿𝐷 𝑤𝑖𝑡ℎ𝑜𝑢𝑡 𝑏𝑎𝑓𝑓𝑙𝑒x100
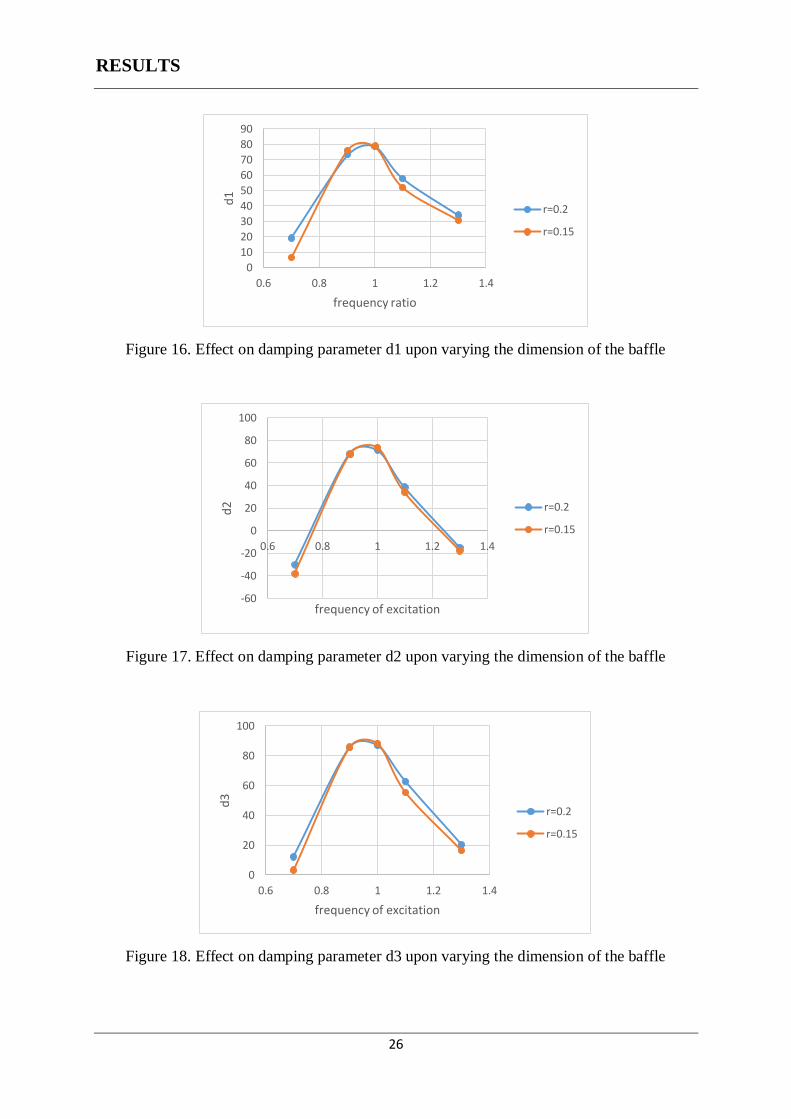
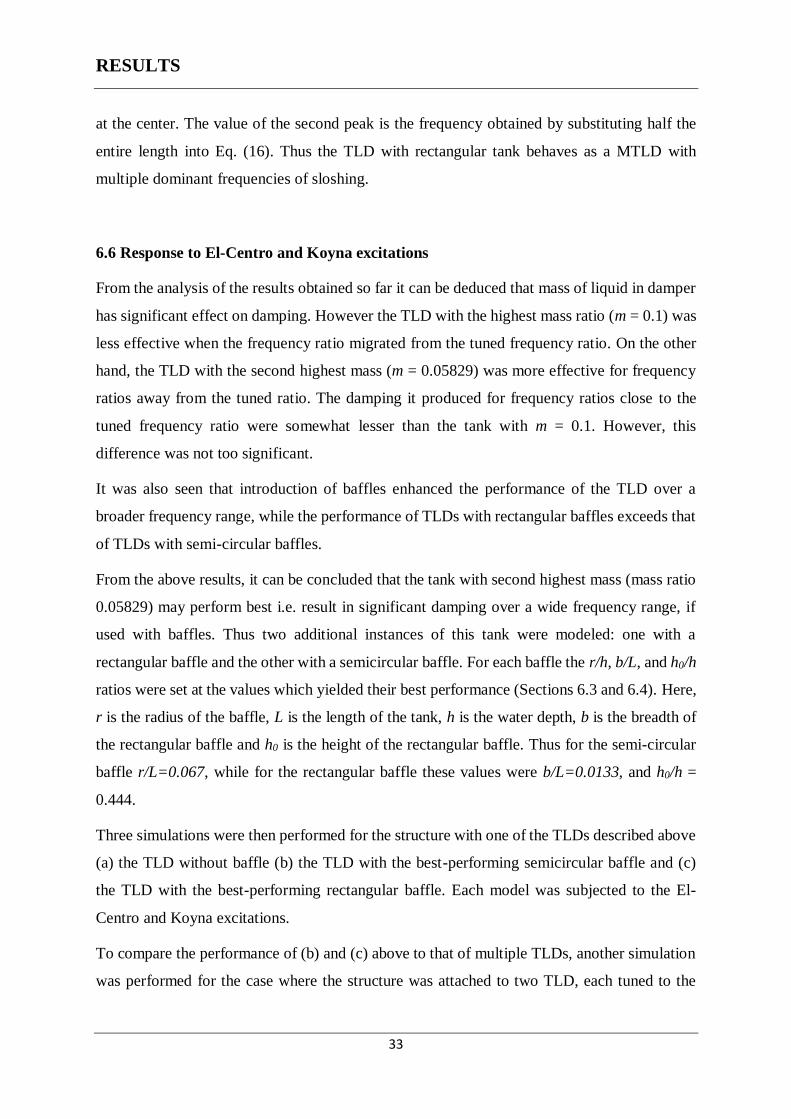
6.3.3 Varying the dimension of the baffle with location at d=0 and A/L=0.01
It can be concluded from the results shown in Fig. 16, 17 and 18, that to increase the
effectiveness of a TLD over a wider range of excitation frequencies, a semicircular baffle with
larger radius is preferable. Since, the damping parameters at frequency ratios close to 1 for both
the TLD s are almost the same, larger baffles are even the more favorable, since it does not
compromise with the performance for excitations tuned to the natural frequency while being
more effective over a wider range of excitation frequencies.
Figure 15. Effect of amplitude of excitation upon damping with baffle
-50
0
50
100
150
200
250
0.6 0.8 1 1.2 1.4
∆d
1
frequency ratio-50
0
50
100
150
200
250
0.6 0.8 1 1.2 1.4
∆d
2frequency ratio
-200
0
200
400
600
800
1000
0.6 0.8 1 1.2 1.4
∆d
3
frequency ratio
RESULTS
26
Figure 16. Effect on damping parameter d1 upon varying the dimension of the baffle
Figure 17. Effect on damping parameter d2 upon varying the dimension of the baffle
Figure 18. Effect on damping parameter d3 upon varying the dimension of the baffle
0
10
20
30
40
50
60
70
80
90
0.6 0.8 1 1.2 1.4
d1
frequency ratio
r=0.2
r=0.15
-60
-40
-20
0
20
40
60
80
100
0.6 0.8 1 1.2 1.4
d2
frequency of excitation
r=0.2
r=0.15
0
20
40
60
80
100
0.6 0.8 1 1.2 1.4
d3
frequency of excitation
r=0.2
r=0.15

RESULTS
27
6.4 Effect on damping due to introduction of rectangular baffle
Presence of semicircular baffle thus increased the effectiveness over a larger frequency range.
It was argued that rectangular baffles would further enhance the effectiveness of TLD, as the
tank would behave as a Multiple Tuned Liquid Damper (MTLD) till the water depth equal to
the height of the baffle.
The frequency of sloshing in shallow water TLD is very sensitive to the depth ratio. A
rectangular baffle divides the entire length of the tank in two parts. Hence it was reasoned that
till a water height equal to the height of the baffle the TLD would have a frequency of sloshing
obtained using the divided lengths of the tanks, while most of the water in the tank would slosh
with a frequency obtained using the entire length of the tank. Thus it was hoped that
introduction of rectangular baffle would have multiple dominant frequencies of sloshing.
Three rectangular baffles were created with constant breadth while varying the height. The
performance of the TLD with these rectangular baffles were compared with the TLD with a
semicircular baffle of radius, r=0.2m. The dimensions of the rectangular baffles considered
were:
i. Breadth (b) =0.4m, height (h0=0.1 m).
ii. Breadth (b) =0.4m, height (h0=0.2 m).
iii. Breadth (b) =0.4m, height (h0=0.3 m).
Fig. 20-22 compares the performance of the rectangular baffle with the performance of the
baffle of radius 0.2m which performed better than the semicircular baffle of radius 0.15m in
the previous analysis. The dimensions of the baffle were chosen such that the breadth of the
rectangular baffle was equal to the diameter of the semicircular baffle. Three instances of the
height was chosen to study the effect of increasing height of the baffle keeping the breadth
constant.

RESULTS
28
Figure 19. TLD with rectangular baffle
The rectangular baffle was located at the center of the tank, in view of the results obtained in
section 6.3.1.
To prevent leakage in the numerical model, small fillets were added to the sharp edges.
Figure 20. Comparison of performance of d1 between rectangular baffle and semicircular
baffle
-10
0
10
20
30
40
50
60
70
80
90
100
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d1
frequency ratio
rectangular 0.4by0.1 semicircular baffle r=0.2
rectangular 0.4by0.2 rectangular 0.4by0.3

RESULTS
29
Figure 21. Comparison of performance of d2 between rectangular baffle and semicircular
baffle
Figure 22. Comparison of performance of d2 between rectangular baffle and semicircular
baffle
The results show that the performance of TLD with the introduction of rectangular baffle
having the same or a greater height as the radius of a semicircular baffle is enhanced over
-60
-40
-20
0
20
40
60
80
100
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d2
frequency ratio
rectangular 0.4by0.1 rectangular 0.4by0.2
rectangular 0.4by0.3 semicircular baffle r=0.2
0
20
40
60
80
100
120
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
d3
frequency ratio
rectangular 0.4by0.1 rectangular 0.4by0.2 rectangular 0.4by0.3 semicircular r=0.2

RESULTS
30
frequency ratios away from the value of 1. At frequency ratio 1, however there is a slight
decrease in all the damping parameters.
6.5 FFT analysis on the response of the TLDs with baffles with white noise excitation
To compare the effectiveness of the TLDs with baffles each TLD was subjected to a white
noise excitation. Since a white noise is unbiased, in the sense that all frequencies participate
equally in the input signal, it can be expected that the response of each TLD to the white noise
would yield important information on its frequency characteristics.
A Gaussian white noise signal was applied to all three TLDS: the TLD without any baffle, the
TLD with semicircular baffle of radius 0.2m and the TLD with rectangular baffle of dimensions
0.4m x 0.2m. Probes were introduces near the end walls of the TLD s in order to measure the
wetted contact areas. Time histories of the wave slosh height were recorded. A Fast Fourier
Transform of the time response data was performed to obtain the frequency spectrum of the
response of each TLD. These are shown in Fig. 25.
What is of interest is the broadness or narrowness of each spectrum. A broader spectrum for
the dampers with baffles compared to that of the damper without a baffle is desirable. This
would indicate that the baffle has succeeded in extending the effectiveness of the damper over
a wider frequency range. This, in turn, would make it much more likely that the damper with
baffle would be effective for a broad band excitation.
Visual inspection of the frequency spectrum cannot always determine the broadness. Thus it
was imperative to come up with a quantifying tool to measure the broadness. Thus a statistical
parameter was searched for measuring the broadness of a spectrum. Such a parameter is already
available in the literature, and is discussed in the next Section.
Fig. 23 shows the time history plot of the generated white noise which zero mean and standard
deviation equal to 2.
An ideal white noise is of infinite length. Since only finite length sample was chosen slight
errors in the autocorrelation was observed. However, the length of the signal generated was
sufficiently large so as to confine the errors to small values so that it did not interfere with the
numerical model solutions.

RESULTS
31
Figure 23. Applied white noise excitation
Figure 24. Autocorrelation of the applied white noise signal
6.5.1 Spectral width parameter
“The spectral width parameter, is a measure of the rms width of a wave-energy density
spectrum.”[5]. The values of range from 0 to 1. The closer the value is to 1, the broader is
the spectrum. The parameter is defined as:
22 0 4 2
0 4
m m m
m m
(25)
where ( )n
nm S (26)

RESULTS
32
nm = the nth moment of the spectrum.
Figure 25. FFT analysis
The spectral width parameters for the three spectrums were calculated. The results are
summarized in Table 3.
Table 3. Spectral width parameters for different TLD types
TLD type
TLD without any baffle 0.86
TLD with semicircular baffle (r= 0.2m) 0.92
TLD with rectangular baffle ( b=0.4m h=0.2m) 0.98
The spectral analysis of the TLD with rectangular tank shows two prominent peaks. The first
peak is equal to the fundamental frequency obtained from Eq. (16) using the full length of the
tank. The baffle divides the TLD length into two equal lengths since the baffle was positioned
RESULTS
33
at the center. The value of the second peak is the frequency obtained by substituting half the
entire length into Eq. (16). Thus the TLD with rectangular tank behaves as a MTLD with
multiple dominant frequencies of sloshing.
6.6 Response to El-Centro and Koyna excitations
From the analysis of the results obtained so far it can be deduced that mass of liquid in damper
has significant effect on damping. However the TLD with the highest mass ratio (m = 0.1) was
less effective when the frequency ratio migrated from the tuned frequency ratio. On the other
hand, the TLD with the second highest mass (m = 0.05829) was more effective for frequency
ratios away from the tuned ratio. The damping it produced for frequency ratios close to the
tuned frequency ratio were somewhat lesser than the tank with m = 0.1. However, this
difference was not too significant.
It was also seen that introduction of baffles enhanced the performance of the TLD over a
broader frequency range, while the performance of TLDs with rectangular baffles exceeds that
of TLDs with semi-circular baffles.
From the above results, it can be concluded that the tank with second highest mass (mass ratio
0.05829) may perform best i.e. result in significant damping over a wide frequency range, if
used with baffles. Thus two additional instances of this tank were modeled: one with a
rectangular baffle and the other with a semicircular baffle. For each baffle the r/h, b/L, and h0/h
ratios were set at the values which yielded their best performance (Sections 6.3 and 6.4). Here,
r is the radius of the baffle, L is the length of the tank, h is the water depth, b is the breadth of
the rectangular baffle and h0 is the height of the rectangular baffle. Thus for the semi-circular
baffle r/L=0.067, while for the rectangular baffle these values were b/L=0.0133, and h0/h =
0.444.
Three simulations were then performed for the structure with one of the TLDs described above
(a) the TLD without baffle (b) the TLD with the best-performing semicircular baffle and (c)
the TLD with the best-performing rectangular baffle. Each model was subjected to the El-
Centro and Koyna excitations.
To compare the performance of (b) and (c) above to that of multiple TLDs, another simulation
was performed for the case where the structure was attached to two TLD, each tuned to the
RESULTS
34
frequency of the structure. This model too was subjected to the El-Centro and Koyna
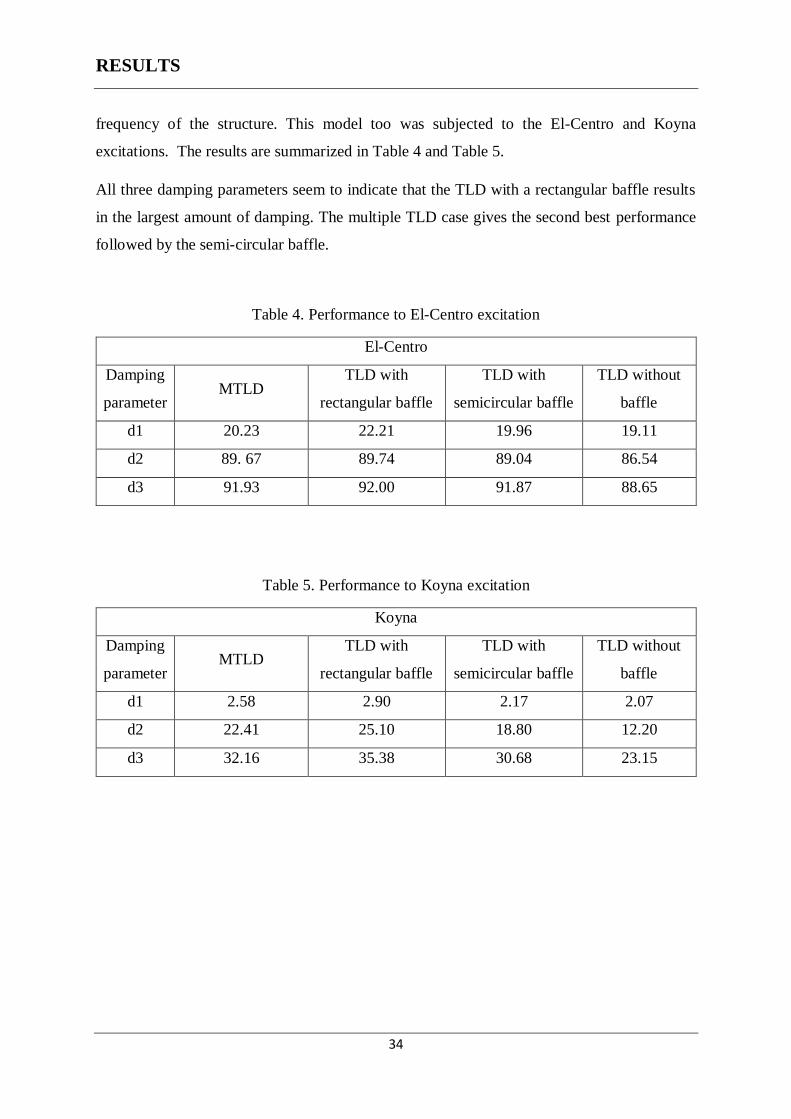
excitations. The results are summarized in Table 4 and Table 5.
All three damping parameters seem to indicate that the TLD with a rectangular baffle results
in the largest amount of damping. The multiple TLD case gives the second best performance
followed by the semi-circular baffle.
Table 4. Performance to El-Centro excitation
El-Centro
Damping
parameter MTLD
TLD with
rectangular baffle
TLD with
semicircular baffle
TLD without
baffle
d1 20.23 22.21 19.96 19.11
d2 89. 67 89.74 89.04 86.54
d3 91.93 92.00 91.87 88.65
Table 5. Performance to Koyna excitation
Koyna
Damping
parameter MTLD
TLD with
rectangular baffle
TLD with
semicircular baffle
TLD without
baffle
d1 2.58 2.90 2.17 2.07
d2 22.41 25.10 18.80 12.20
d3 32.16 35.38 30.68 23.15

35
7. CONCLUSIONS
This study, while confined to shallow water TLD was aimed at investigating the effect of mass
of fluid in the tank, devising parameters to measure the extent of damping and to explore
mechanisms for enhancing the performance of a TLD to a broad band excitation.
The parameters adapted to measure damping performed quite well for all the cases considered.
In all the cases, the damping parameters showed a very similar pattern: although their
magnitudes were different. Thus these parameters can be used to compare the extent of
damping for different configurations of the dampers in a numerical analyses.
The studies performed to establish the effect of mass of fluid on the damping resulted in some
interesting conclusions. The graphs describing the variation of the damping parameters with
frequency ratio illustrate that TLDs with comparatively small fluid mass seem to be more
effective over a wider frequency range than TLDs with a larger mass of fluid. While more
damping can be achieved with a TLD of higher mass when the frequency of excitation is close
to the tuned frequency, its performance will rapidly degrade when the frequency ratio is
substantially different from one.
The study also establishes the effectiveness of baffles in helping achieve better damping
performance for broad band frequency of excitation. Rectangular baffles seem to be more
effective than semicircular baffles with radius equivalent to the height of the rectangular baffle.
A Fast Fourier Transform of the response shows that a TLD with rectangular baffle has two
prominent frequencies of sloshing. The first frequency is the fundamental frequency of sloshing
due to the entire length of the tank, while the second peak is due to the length by which the
baffle divide the total length as explained in the previous sections.
Damping over a wider band of excitation can also be achieved by using several TLDS
(MTLDs) with different frequencies. However, the same effect can be achieved more
economically by using a single TLD with a baffle, since the fabrication and construction cost
of a baffle is likely to be considerably less than the cost of constructing multiple TLDs. Also
the present results seem to indicate that the performance of TLDs with rectangular baffles may
be superior to that of multiple TLDs.

36
8. REFERENCES
[1] ABAQUS 6.9 Benchmarks Manual..
[2] ABAQUS 6.9 User Manual.
[3] Banerji P. ,"Tuned Liquid Dampers for Control of Earthwuake response,",paper presented at
Thirteenth World Conference on Earthquake Engineering,Vancouver,B.C., Canada,August 1-
6,2004.
[4] Biswal KC, Bhattacharya S.K. and Sinha P.K., "Dynamic response analysis of a liquid-filled
cylindrical tank with annular baffle," Journal of Sound and Vibration, vol. 274, pp. 13-37, 2004.
[5] Chakrabarti S.K., Hydrodynamics of Offshore Structures, Southampton Bosto: Computational
Mechanics Publications, 1994.
[6] Dorothy Reed, Harry Yeh and Jinkyu Yu, "Investigation of Tuned Liquid Damperd under large
amplitude of excitation," Journal of Engineering Mechanics, vol. 10, pp. 1082-1088, 1996.
[7] Dorothy Reed, Harry Yeh, Jinkyu Yu and Sigur Gasdsson, "An Investigation of Tuned Liquid
dampers for Structural Control". Kareem, Yalla and McCullough, "Sloshing-Slamming Dynamics-
S2-Analogy for Tuned Liquid dampers," Vibro-Impact Dynamics of Ocean Systems, vol. 44, pp.
123-133, 2009.
[8] Jin-Kyu-Yu, Toshihiro Wakahara and Dorothy A. Reed, "A Non-Linear Numerical Model of the
Tuned Liquid Damper," Earthquake Engineering and Structural Dynamics, vol. 28, pp. 671-686,
1999.
[9] Kareem, Yalla and McCullough, "Sloshing-Slamming Dynamics-S2-Analogy for Tuned Liquid
dampers," Vibro-Impact Dynamics of Ocean Systems, vol. 44, pp. 123-133, 2009.
[10] Kondo I. and Hamamoto T. ,"Seismic Damage Detection of Multi-Story Buildings Using
Vibration Monitoring,". Paper presented at Eleventh World Conference on Earthquake
Engineering,1996 (paper number 988).
[11] Modi V.J. and Akinturk A., “An efficient liquid sloshing damper for control of wind-induced
instabilities”, Journal of Wind Engineering and Industrial Aerodynamics,vol. 90, pp. 1907-1918,
2002.
[12] Modi V.J. and Munshi S.R., “AN EFFICIENT LIQUID SLOSHING DAMPER FOR VIBRATIONAL
CONTROL”, Journal of Fluids and Structures, vol. 12, pp. 1055-1071, 1998.
[13] Nakayama and Washizu, "The boundary element method applied to the analysis of two-
dimensional non-linear sloshing problems," International Journal of Numerical Methods in
Engineering, vol. 17, pp. 1631-1646, 1981.
[14] R. A. Irahim, Liquid Sloshing Dynamics Theory and Applications, New York, USA: Cambridge
University Press, 2005.

37
[15] Yamamoto K. and Kawahawa M.,”Structural Oscillation Control using Tuned Liquid Damper”,
Computers and Structures,vol. 71, pp. 435-446,1999.