numerical modelling of sound transmission in lightweight ... · numerical modelling of sound...
TRANSCRIPT

Universitat Politecnica de Catalunya
Programa de Doctorat d’Enginyeria Civil
Laboratori de Calcul Numeric
Numerical modelling of sound
transmission in lightweight structures
by Jordi Poblet-Puig
Doctoral Thesis
Advisor: Antonio Rodrıguez-Ferran
Barcelona, January 2008


Abstract
Numerical modelling of soundtransmission in lightweight structures
Jordi Poblet-Puig
The thesis deals with the numerical modelling of sound transmission. All the
analyses are done in the frequency domain and assuming that the structures are
linear and elastic. Linear acoustics is considered for the fluid domains. Thus, the
fluid-structure interaction problems analysed here are governed by the vibroacoustic
equations. The models are applied to the field of building acoustics, with especial
interest on lightweight structures.
A set of one-dimensional models for single and layered partitions considering finite
acoustic domains is developed. Preliminary parametric analyses are done, considering
aspects like the acoustic absorption, the structural damping, the separation between
layers, the quality of absorbing material, or the influence of the eigenfrequencies of
the problem in the isolation capacity. The analytical solution of these situations is
available and it is used to test two and three-dimensional models.
Numerical-based models for vibroacoustic problems lead to large system of lin-
ear equations. This is an important drawback for mid and high-frequencies where
the computational costs become unaffordable. The block Gauss-Seidel algorithm has
been applied for sound transmission problems. Its performance has been analysed
by means of analytical expressions of the spectral radius obtained in one-dimensional
situations. Moreover, a selective coupling strategy is developed in order to efficiently
iii

solve problems where some acoustic domains are strongly coupled (i.e. double walls).
In building acoustics, the acoustic domains are often cuboid-shaped rooms. Ana-
lytical expressions of the eigenfunctions are well known and can be used in order to
obtain the pressure field by means of a modal analysis. A model that combines this
with a more general finite element (FEM) description of the structure is presented.
This mixed approach is more efficient (time and memory requirements) than a FEM-
FEM model. The most relevant aspects of the modal-FEM approach are analysed:
computational costs, modelling of acoustic absorption, selection of the modal basis.
The model is used in order to predict the isolation capacity of single and double
walls. Heavy and lightweight structures are considered. The influence on the sound
reduction index of parameters related with the wall environment like the room size,
the position of the source, the correction due to acoustic absorption is shown. Wall
properties such as its size, the damping or the boundary conditions are also considered,
as well as more specific aspects related with double walls (cavity thickness, quality of
the absorbing material).
The effect of flanking transmissions on the sound reduction index is also taken into
account. The vibration level difference and the sound transmission through several
junction types (L, T and X-shaped) are calculated. In the X-shaped junction case,
four rooms are analysed at the same time. The transmission between two of them is
only caused by flanking paths. The possibilities of numerical models are illustrated
with a case-study where the isolation capacities of a double wall with and without
an accurate acoustic design are compared. The existence of a vibration transmission
path between the floor and the leaves of the wall drastically reduces its performance.
The response of double walls depends on the type of mechanical connections be-
tween leaves. The attention is focused here on the case of lightweight steel studs. They
have been characterised by means of an equivalent spring. The value of the stiffness of
the spring is obtained by comparison of the vibration level difference between leaves
of a double wall obtained with two different models: i) considering the geometry of
the stud; ii) using springs instead of studs. Spectral structural finite elements are
used in order to increase the frequency range.
iv

These steel studs also modifie the radiation properties of unsymmetrical floors.
The different radiation efficiency between a planar face or a face with studs is cal-
culated by means of a numerical model using boundary elements. Differences are
significant. This is a clear example of how the details of the structure are important
in order to perform accurate predictions of sound isolation.
v


Acknowledgments
I would like to thank my advisor Antonio Rodrıguez-Ferran, for his dedication,
patience, and objective point of view. He has dedicated a lot of time and efforts in
order to improve the contents of the research and the quality of the final document.
This thesis has been done in an excellent research framework, the Laboratori de
Calcul Numeric (LaCaN). I am very grateful to Antonio Huerta for the extra effort
that suppose being at the head of this human group and giving me the opportunity to
join the team. I appreciate very much the support and friendship of all the colleagues
along these years. I would like to mention the help of Pedro Dıez in order to obtain the
grant and understand numerical errors, the numerous tricks revealed by the mestre
Xevi Roca, and the comprehension and scientific conversations with Nati Pastor.
It is thanks to the guideline provided by Alfredo Arnedo some years ago that I
started Ph.D. studies. He convinced me to enter into the research world.
I spent five months in the Centre Scientifique et Technique du Batiment (CSTB)
in Saint Martin d’Heres. This period has been very important in my personal and
academical education and decisive in the development of the thesis. The people that
I found there made the adaptation easy and the stage very pleasant. I would like to
thank Catherine Guigou for her sincere scientific opinions and for sharing her acoustic
knowledge and modelling results with me, Michel Villot for providing ideas, proposing
technological objectives and contributing with his experience in the field of acoustics
and vibration, and Philippe Jean for the very productive discussions on the numerical
modelling of vibroacoustic phenomena.
The development of this work has been simultaneous in time with the ‘High qual-
ity acoustic and vibration performance of lightweight steel constructions (ACOUSVI-
vii

BRA)’ project. The technological challenges and the empirical information provided
by the project have been important in order to enrich the thesis contents. I would
like to thank the partners for the nice discussions and experiences.
Many other people have helped me during this time with scientific discussions or
sending papers and references. Among others, Dr. Bouillard, Dr. Brunskog, col-
leagues and teachers of Computational Aspects of Structural Acoustics and Vibration
course at CISM and the members of the Laboratori d’Enginyeria Acustica i Mecanica
(LEAM, UPC).
I have been mainly using free software like Gmsh, PETSc, LAPACK, GSL, Open-
FEM or Code-Aster in a Linux environment during the thesis and the finite element
code CASTEM for a long time. I would also like to thank Free Field Technologies for
providing a free license for using ACTRAN and its user manual.
Thanks a lot to my family, my parents Conxa i Albert, my sister Mıriam, for
unconditional support, understanding and respect and to tiet Coque for being always
a technological reference. I appreciate very much the comprehension and opinions
from all of my friends, such as Alfredo and Giuseppe.
The financial support of the Generalitat de Catalunya i el Fons Social Europeu
(2003 FI 00652), the Research Fund for Coal and Steel, el Departament de Matematica
Aplicada III, Departament d’Infraestructura del Transport i del Territori and the Es-
cola Tecnica Superior d’Enginyers de Camins Canals i Ports is gratefully acknowl-
edged.
viii

Contents
Abstract iii
Acknowledgments vii
Contents xii
List of symbols xiii
1 Introduction 11.1 Different models for sound transmission problems . . . . . . . . . . . . 11.2 Lightweight structures and vibroacoustics . . . . . . . . . . . . . . . . . 41.3 Acoustic standards and regulations . . . . . . . . . . . . . . . . . . . . 51.4 Goals, scope and outline of the thesis . . . . . . . . . . . . . . . . . . . 81.5 Review of vibroacoustics equations . . . . . . . . . . . . . . . . . . . . 10
1.5.1 The acoustic problem . . . . . . . . . . . . . . . . . . . . . . . . 101.5.2 Acoustic problem types . . . . . . . . . . . . . . . . . . . . . . . 141.5.3 Analysis in the frequency-domain: the Helmholtz equation . . . 17
2 Review of numerical methods for vibroacoustics 232.1 Numerical methods for the low-frequency range . . . . . . . . . . . . . 24
2.1.1 The finite element method (FEM) . . . . . . . . . . . . . . . . . 242.1.2 The boundary element method (BEM) . . . . . . . . . . . . . . 262.1.3 Numerical techniques for the coupled problem . . . . . . . . . . 31
2.2 Numerical methods for the mid-frequency range . . . . . . . . . . . . . 362.2.1 Acoustic problems . . . . . . . . . . . . . . . . . . . . . . . . . 382.2.2 Structural dynamics . . . . . . . . . . . . . . . . . . . . . . . . 45
2.3 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3 One-dimensional model for vibroacoustics 513.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.2 One-dimensional model for undamped vibroacoustics . . . . . . . . . . 52
3.2.1 Problem statement . . . . . . . . . . . . . . . . . . . . . . . . . 52
ix

3.2.2 Analytical solution . . . . . . . . . . . . . . . . . . . . . . . . . 553.2.3 Application example . . . . . . . . . . . . . . . . . . . . . . . . 57
3.3 One-dimensional model for damped vibroacoustics . . . . . . . . . . . . 623.3.1 Problem statement . . . . . . . . . . . . . . . . . . . . . . . . . 623.3.2 Analytical solution . . . . . . . . . . . . . . . . . . . . . . . . . 633.3.3 Application examples . . . . . . . . . . . . . . . . . . . . . . . . 64
3.4 One-dimensional model of layered partitions . . . . . . . . . . . . . . . 673.4.1 Problem statement . . . . . . . . . . . . . . . . . . . . . . . . . 673.4.2 Analytical solution . . . . . . . . . . . . . . . . . . . . . . . . . 703.4.3 Application examples . . . . . . . . . . . . . . . . . . . . . . . . 71
3.5 Validation of finite element models . . . . . . . . . . . . . . . . . . . . 733.6 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4 The block Gauss-Seidel method in sound transmission problems 774.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.2 The block Gauss-Seidel algorithm . . . . . . . . . . . . . . . . . . . . . 784.3 Review of block iterative solvers in acoustics . . . . . . . . . . . . . . . 804.4 Influence of the degree of coupling . . . . . . . . . . . . . . . . . . . . . 814.5 Analysis of the block Gauss-Seidel method . . . . . . . . . . . . . . . . 83
4.5.1 The convergence condition . . . . . . . . . . . . . . . . . . . . . 834.5.2 Physical interpretation of the convergence condition . . . . . . . 83
4.6 Application examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.6.1 Influence of damping . . . . . . . . . . . . . . . . . . . . . . . . 874.6.2 Influence of the fluid density . . . . . . . . . . . . . . . . . . . . 894.6.3 Influence of particular eigenfrequencies . . . . . . . . . . . . . . 90
4.7 The case of double walls: selective coupling of fluid domains . . . . . . 914.7.1 Validation: one-dimensional example . . . . . . . . . . . . . . . 944.7.2 Application: two-dimensional example . . . . . . . . . . . . . . 94
4.8 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5 Combined modal-FEM approach for vibroacoustics 995.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.2 Formulation of the model . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.3 Analysis of computational costs . . . . . . . . . . . . . . . . . . . . . . 1065.4 One-dimensional examples and sources of error . . . . . . . . . . . . . . 1125.5 Role of acoustic absorption and the size of the modal basis . . . . . . . 114
5.5.1 Acoustic absorption . . . . . . . . . . . . . . . . . . . . . . . . . 1145.5.2 Relationship of matrix bandwidth and the Robin boundary con-
dition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1195.5.3 Influence of frequency bandwidth . . . . . . . . . . . . . . . . . 1215.5.4 Selection of acoustic modes . . . . . . . . . . . . . . . . . . . . 121
x

5.6 Validation example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285.7 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6 Numerical modelling of sound transmission in single and doublewalls 1356.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1356.2 Literature review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1366.3 Description of the problem analysed . . . . . . . . . . . . . . . . . . . . 1416.4 Low-frequency response . . . . . . . . . . . . . . . . . . . . . . . . . . . 1436.5 Acoustic isolation of single walls . . . . . . . . . . . . . . . . . . . . . . 147
6.5.1 Influence of the absorption correction on R . . . . . . . . . . . . 1476.5.2 Comparison between two-dimensional and three-dimensional mod-
els . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1516.5.3 Influence of room size . . . . . . . . . . . . . . . . . . . . . . . . 1536.5.4 Influence of sound source position . . . . . . . . . . . . . . . . . 1546.5.5 Influence of window size . . . . . . . . . . . . . . . . . . . . . . 1556.5.6 Influence of the mechanical properties and boundary conditions
of the walls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1576.6 Acoustic isolation of double walls . . . . . . . . . . . . . . . . . . . . . 158
6.6.1 Influence of the separation between leaves and the type of ab-sorbing material . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
6.6.2 Effect of mechanical connections between leaves . . . . . . . . . 1616.7 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7 The role of studs in the sound transmission of double walls 1657.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1657.2 Vibration behaviour of steel studs . . . . . . . . . . . . . . . . . . . . . 1687.3 Studs and leaves analysed . . . . . . . . . . . . . . . . . . . . . . . . . 1717.4 Identification of the stiffness of studs . . . . . . . . . . . . . . . . . . . 173
7.4.1 Cross-section structural vibration models . . . . . . . . . . . . . 1737.4.2 Influence of stud shape in the vibration level difference . . . . . 1747.4.3 Stud equivalent stiffness . . . . . . . . . . . . . . . . . . . . . . 176
7.5 Using the stiffness values in a SEA model . . . . . . . . . . . . . . . . . 1787.6 Global response of double walls . . . . . . . . . . . . . . . . . . . . . . 1837.7 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
8 Numerical modelling of flanking transmissions 1898.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1898.2 The flanking transmission model of EN 12354 . . . . . . . . . . . . . . 1928.3 Sound transmission in rigid junctions . . . . . . . . . . . . . . . . . . . 196
8.3.1 L-shaped junctions . . . . . . . . . . . . . . . . . . . . . . . . . 200
xi

8.3.2 T-shaped junctions . . . . . . . . . . . . . . . . . . . . . . . . . 2018.3.3 X-shaped junctions . . . . . . . . . . . . . . . . . . . . . . . . . 206
8.4 Case-study of flanking transmission . . . . . . . . . . . . . . . . . . . . 2078.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
9 Numerical modelling of radiation efficiency 2139.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2139.2 Role of beams in the radiation of a surface . . . . . . . . . . . . . . . . 2159.3 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
10 Conclusions and future work 22110.1 Conclusions and contributions of the thesis . . . . . . . . . . . . . . . . 22110.2 Future developments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
Bibliography 244
xii

List of symbols
Latin symbols
aj Contribution of mode j
A Acoustic admittance
A Cross section area of a beam
A,B BEM discretization matrices
B Plate bending stiffness per unit width
c Velocity of sound in air
C Proportional damping coefficient of a single mass (Chapter 3)
C Linear elastic constitutive tensor
Cac Acoustic damping matrix (FEM)
Cs Solid proportional damping matrix (FEM)
CSF ,CFS Fluid-structure coupling matrices (Chapter 4)
d Separation between leaves in a double wall
dij Vibration transmission factor
D Sound level difference between acoustic domains
Dij Vibration level difference
E Young’s modulus
f Frequency
fac Acoustic nodal force vector (FEM)
fmodac Acoustic force vector (Modal analysis)
fc Coincidence (critical) frequency of a single wall
fF Generic fluid force vector (Chapter 4)
fFS Fluid force vector due to the interaction with a structure
xiii

fgc Geometrical coincidence frequency of a mode of a finite wall (Chap-ter 9)
fm−a−m Theoretical mass-mir-mass resonance of a double fall (frequency)
fs Solid nodal force vector (FEM)
fS Generic solid force vector (Chapter 4)
fSF Structure force vector due to the interaction with a fluid
F Generic fluid matrix (Chapter 4)
g Phasor of G
G Injection/extraction of mass per unit time
G Frequency factor in Chapter 3
G Iteration matrix (Chapter 4)
h Dimensionless element size
H(2)n Hankel function of second kind and order n
i Imaginary unit,√−1
I Modulus of acoustic intensity
III Acoustic intensity
I Inertia of a beam
Jn Bessel function of first kind and order n
k Wave number
K Stiffness of a spring of a single mass
Kt Translational stiffness of a spring
Kθ Rotational stiffness of a spring
Kij Vibration reduction index
Kac Acoustic stiffness matrix
Ks Solid stiffness matrix
` Main dimension of an structural element (i.e. in the case of a beamits length)
`x, `y, `z Dimensions of a cuboid
L Sound pressure level
Lmod Fluid-structure coupling matrix when modal analysis is used in thefluid part
xiv

LSF ,LFS Geometrical fluid-structure coupling matrices
M Mass of a particle
Mac Acoustic mass matrix
Ms Solid mass matrix
Mψ Modal analysis matrix
nnn Outward unit normal
nac Number of acoustic nodes
nmod Number of acoustic modes
ns Number of solid nodes
nsd Number of space dimensions
nx, ny, nz Number of half-waves in the x, y, and z directions of a cuboid
N Number of waves (Chapter 3)
Nj Shape function
Nj Matrix shape function for the case of structural elements
p Degree of interpolation
p Phasor of the acoustic pressure
p Vector of nodal values of acoustic pressure
p0 Reference value of pressure (usually 2 · 10−5 Pa)
pd Phasor of prescribed value of the acoustic pressure
ph Numerical solution for the phasor of the acoustic pressure
phom Phasor of acoustic pressure (homogeneous solution)
pI Interpolation of the exact solution
pnnn Vector of nodal values of normal derivative of acoustic pressure
pp Phasor of acoustic pressure (particular solution)
prms Root mean square pressure
P Acoustic pressure
P Acoustic power
P0 Mean pressure
Pd Prescribed value of pressure in the Dirichlet boundary
Pin Incoming pressure
Pout Outgoing pressure
xv

Ps Scattered pressure
PT Total pressure
q Phasor of the source-strength amplitude
Q Source-strength amplitude of a punctual source
r Radial coordinate
R Sound reduction index (TL sound transmission loss in somecountries)
RT60 Reverberation time
S Surface
S Generic solid matrix (Chapter 4)
S∗ Generic solid matrix taking into account some fluid domains (Chap-ter 4)
t Thickness
ttt Phasor of surface mechanical force vector
tC T-complete system of functions
T Period
TTT Surface mechanical force vector
u Phasor of a solid displacement
uuu Phasor of the vector of solid displacements
u Vector of nodal values of solid displacements (and rotations)
UUU Vector of solid displacements
UUUD Vector of imposed solid displacements
vvv Phasor of the vector of acoustic velocity
vnnn Phasor of normal acoustic air velocity
vrms Root mean square velocity
VVV Acoustic velocity
VVV 0 Mean velocity
Vnnn Normal acoustic air velocity
VVV T Total velocity
W Acoustic power
xxx Vector of spatial coordinates
xvi

xF Generic fluid unknowns vector (Chapter 4)
xS Generic solid unknowns vector (Chapter 4)
Y Punctual mobility
Yn Bessel function of second kind and order n
Z Acoustic impedance
Zw Wall impedance
Greek symbols
α Acoustic absorption coefficient
αC Storage cost of a complex variable
αI Storage cost of an integer variable
ΓD Dirichlet boundary
ΓFS Fluid-solid interaction boundary
ΓINF Unbounded boundary
ΓN Neumann boundary
ΓR Robin boundary
δ Dirac-delta
δij Kronecker delta
∆ Determinant (Chapter 3)
η Hysteretic damping coefficient (loss factor)
θ Angle defining wave direction
ϑ Ratio of speeds (Chapter 3)
k Dimensionless wave number
λ Ratio of lengths (Chapter 3)
λair Length of waves in air
λbending Length of bending waves in a solid
µ Ratio of masses (Chapter 3)
ν Poisson’s ratio
Ξ Acoustic energy
ρ Acoustic air density
xvii

ρ0 Mean air density
ρF Fluid density (Chapter 4)
ρsolid Volumetric solid density
ρsurf Surface solid density
ρT Total air density
% Resistivity of an absorbent material
σ Radiation efficiency
σ Cauchy stress tensor
σ Phasor of σ
ς Integration constant depending on the boundary type (BEM)
τ Sound transmission coefficient and arbitrary constant in Chapter 2
τav Averaged sound transmission coefficient
ϕ Acoustic test function
Υ Robin boundary condition constant
ψ Acoustic mode
Ψ Fundamental solution (BEM)
ω Angular frequency or pulsation
ωI Imaginary part of the pulsation, Im ωωnat Eigenfrequency of a single mass (Chapter 3)
ωm−a−m Theoretical mass-air-mass resonance of a double fall (pulsation)
Ωac Acoustic domain
Operators
∇nnn Normal derivative
∇s Symmetric gradient
∇4 Biharmonic operator
Time average of
Complex conjugate of
< > Spatial average of
Dimensionless variable (Chapter 3)
xviii

char Characteristic value (Chapter 3)
ρ () Spectral radius of (Chapter 4)
Re Real part of
Im Imaginary part of
xix


Chapter 1
Introduction
To satisfy acoustic requirements is nowadays important in many sectors, such as the
automotive, aerospace and building industries, among others. A typical problem
caused by poor acoustic designs is the high sound levels that final users have to bear.
In this thesis, the problem of sound transmission is studied by means of numerical-
based models. The interest is focused on the technological field of building acoustics
with special emphasis in lightweight constructions. Most of the models used here are
deterministic approaches.
1.1 Different models for sound transmission prob-
lems
In sound transmission problems a wide frequency range has to be considered. The
human ear can hear sounds between 20 Hz and 20 000 Hz. However, the interest
is mainly focused on the low-frequency part of the spectrum. Low-frequency sound
tends to be transmitted while high-frequency sound is reflected. The main sources
of low-frequency noise as well as their consequences in people have been studied by
Berglund et al. (1996).
The large number of models of sound transmission can be classified into determin-
istic and statistical approaches. None of them is able to correctly deal with the full fre-
1

2 Introduction
quency range of interest. The type of response is very variable with frequency. While
for low frequencies the modal density is small and the response is modal-controlled,
for high frequencies the modal density is very high and the variation of the outputs
is smoother. Many different aspects can modify the obtained responses: geometrical
data (room sizes, wall dimensions, thickness of layers, position of the sound source),
mechanical properties (densities, stiffnesses of materials, damping) or acoustic param-
eters (absorption). For example, room sizes or wall boundary conditions can modify
the response for low frequencies but are much less critical for higher frequencies. This
variability of the relevant data of the problem is a demanding aspect for modelling
techniques. Most of the existing models can only consider some of the problem vari-
ables. This determines the frequency range where the results can be considered as
valid.
Deterministic models can be divided between those dealing with the vibroacoustic
equations without additional hypotheses and those that make extra simplifications,
like considering infinite acoustic domains. The former often use numerical techniques
in order to solve the equations (i.e. finite and boundary element methods, Atalla and
Bernhard (1994)). They are very accurate since they can consider the exact geom-
etry of the problem and use only basic data (densities, damping coefficients, Young
modulus,...). Since the pressure and vibration fields are provided by these models,
the detail level can be as high as necessary. All the different response types (modal,
critical frequencies,...) are obtained in a natural way without modifying the model.
These realistic models have two main drawbacks: (1) the computational cost and (2)
the loss of meaning of a deterministic solution and the uncertainty of the validity of
the dynamic properties (or even the governing equations) at high frequencies. The
high computational cost is caused by the required discretisations of the geometry of
the problem and the large number of situations to be analysed. The discretisation
criteria depend on the ratio between the length of the expected waves (oscillations of
acoustic pressure or structural vibrations) and the dimension of the studied domains
(rooms, walls,...). These systems have to be successively solved in order to reproduce
the reverberant pressure fields, to cover an acceptable frequency range or to check the

1.1 Different models for sound transmission problems 3
influence of some of the parameters of the model. The type of models developed in
the thesis mainly belong to this first group: deterministic models without additional
hypotheses. The most often used hypothesis is to consider unbounded acoustic do-
mains and structures. This simplifies the equations and even analytical solutions can
be obtained (i.e. the mass law, Fahy (1989)). The wave approach is a clear example
of a deterministic model with an additional hypothesis. It is not expensive and can be
phenomenologically enriched with experimental information. Nevertheless, it cannot
be considered a general technique since different models have to be developed for each
new situation: single walls, double walls, double walls with flanking paths between
leaves,... Examples can be found in Guigou and Villot (2003).
At high frequencies the response of the vibroacoustic system is diffuse. Any small
modification in the geometry or the mechanical properties can completely change the
detail of the solution (i.e. velocity field over a structure). Then, deterministic solutions
become meaningless. The interest must not be focused on the detail because it is very
variable. Statistical outputs like the averaged velocity on a part of the structure
have physical meaning and are useful from an engineering point of view. They are
often independent of small variations of the problem data. The more efficient way
to obtain these outputs is by means of a statistical model. Most of them use the
statistical energy analysis technique (SEA, Fischer (2006)). The whole domain is
split in subsystems. Each of them is described by its energy. Averages in excitation
and observation points, and in frequency bandwidths are considered. If the modal
density is high and a large number of points are considered (i.e. rain-on-the-roof
excitation) it leads to very simplified expressions. Dissipation of energy as well as
power transfer between subsystems are also taken into account. The coupling factors
are more difficult to obtain and so often deterministic models or experimental data
are used to provide this important information. This can lead SEA models to be
based in something more than the classical vibroacoustic equations and to incorporate
phenomenological data. A general overview of SEA can be found in Fahy (1994). SEA
has been used in order to study the sound transmission in buildings. See, for example,
Craik (1996) and Koizumi et al. (2002).

4 Introduction
1.2 Lightweight structures and vibroacoustics
Lightweight structures are characterised by an optimal performance with a minimum
mass. The total mass of a lightweight structure is minimised by means of an accurate
design that is oriented to the specific function of the structure.
The frontier between the concepts of heavy and lightweight can be rather diffuse
and depends on the technological field. Moreover, since the structure is designed
depending on the final functions, the typology of lightweight structures is wide. We
can be using the lightweight concept for a satellite, a cover constructed by means of
textile membranes or even a competition car. In the context of this thesis, the concept
of lightweight structures is applied to building constructions and more specifically
to walls and floors. These lightweight construction elements can be made of very
different materials like steel, wood, gypsum, mineral wool,... but rarely with concrete
or masonry which are the typical options that lead to a heavy element. The former
are more expensive and elaborate, but since inferior quantities are required the final
structure can be cheaper. An important difference is that while heavy structures are
often homogeneous and simple, the lightweight structures are heterogeneous and have
a lot of construction details (i.e. connections between elements).
A typical example of the lightweight structures studied here is a double wall (see
Fig. 1.1). It is usually constructed by means of a wood or steel framework that
provides stability and resistance and plasterboards and mineral wools that guarantee
the other functions: to create a physical separation between contiguous rooms and
provide thermal and acoustic isolation. The design is optimised in the sense that
the steel framework is, in general, less resistant that a concrete or masonry wall but
the minimal requirements are satisfied by both structural solutions. The materials
used in the core of the double wall are chosen in order to be efficient in the heat and
sound isolation. The lightweight wall has advantages in terms of economical costs and
construction, transport and installation facilities.
Lightweight structures require more elaborate modelling techniques. For example,
their failure can often be caused by local and global bucking instead of plastification
due to high stresses. Several relevant modelling aspects must be taken into account

1.3 Acoustic standards and regulations 5
when dealing with sound transmission problems. Considering construction details
can be important. A typical case are the connections between the elements that
compose the wall and the type of junctions with other walls and floors. Cold-formed
steel profiles are often used and some of the structural assumptions valid for heavy
structures can lead to unexpected results. Deformations (and vibrations) at cross
section level are possible. The structure can be composed of different parts. This
often leads to more elaborate models. The critical frequency of lightweight structures
is higher than for the case of heavy structures. In the first case the forced transmission
(caused by the geometrical coincidence of pressure and displacement waves) can be
important while in the second case the sound is mainly transmitted due to resonant
transmission (caused by the excitation of the closer modes in the structure and the
acoustic domains). Moreover, the vibration wave lengths in a lightweight structure
are shorter than in a heavy structure. This reduces the frequency range where the
response is modal, but can accentuate the geometry effects of damping (i.e. in a
lightweight structure the effects of a punctual force can be localised while for the
same frequency and force, the displacements are large all around a heavy structure).
In future chapters calculations on lightweight and heavy structures will be shown.
The comparison between both type of responses enriches the discussions. The tech-
niques exposed here are valid for both types of structures. However, some of the topics
of the thesis are specific of lightweight structures: double walls, characterisation of
the connecting elements, and modification in the radiation efficiency due to stiffeners
(steel beams are not used in concrete or masonry walls).
1.3 Acoustic standards and regulations
Two general issues have to be considered in order to perform good acoustic designs
of buildings: to control the quality of sound inside rooms and to isolate them from
exterior noise (i.e. sound generated in contiguous rooms or coming from the exterior
of the building).
The key parameter in the first aspect is the reverberation time, which measures the

6 Introduction
(a) (b)
Figure 1.1: Lightweight structures. (a) Detail of a double wall. (b) Construction of alightweight house. Source: Kesti et al. (2006).
decay of sound in the room. A low reverberation time is important in order to ensure
speech intelligibility. In small rooms it is mainly controlled by the amount of acoustic
absorption. The problem is much more complicated in concert halls or auditoriums,
where other aspects such as the room shape or the relative position between the
sources of sound (i.e. loudspeakers, lecturers) and the audience is important.
Several phenomena are distinguished in order to study the isolation capacity of
floors and walls:
• Impact noise is sound generated by fast mechanical excitations of structures
(e.g. footsteps). The sound is heard more clearly in other rooms different from
the one where it is produced.
• The direct airborne sound transmission between contiguous rooms (i.e. the
sound generated in a room is transmitted to another due to direct acoustic
excitation of the separating element).
• Flanking transmissions, that is the amount of sound not transmitted by the

1.3 Acoustic standards and regulations 7
direct path (through the wall) but through indirect paths in the structure.
The thesis is focused on the analysis, development and application of prediction
techniques of sound transmission. They have been mainly used in order to predict
the direct sound transmission and flanking transmissions, and to provide acoustic
data like the radiation efficiency or the vibration level difference between structural
elements.
Several parameters are defined by building acoustic regulations (e.g. the Spanish
CTE (2007) or the European EN-12354 (2000) regulations) in order to ensure that
structural elements have sufficiently good isolation capacities. These parameters are
measured in the field or in the laboratory. The goal of modelling techniques is to
predict the acoustic response of structural elements and provide tools in order to
improve the acoustic design.
The proposed parameters concerning direct airborne transmission between con-
tiguous rooms and its limit value for some national European regulations are sum-
marised in Table 1.1.
Country UK France Spain1 Spain2 Finland
Limitation (DnT,w DnTA > 53 RA > 45dBA DnTA > R′
w > 55
+Ctr,1003150) ≥ 45 45 − 55 dBA
Country Sweden Norway Denmark Iceland Netherlands
Limitation (Rw with (Rw with Rw ≥ 52− 53 Rw ≥ 55 Rw ≥ 51
C50−3150) ≥ 52 C50−5000) ≥ 55
Table 1.1: Summary of requirements for airborne sound insulation for separatingwalls and floors (dB) in several European countries. For Spain: 1 Old regulationNBE-CA-88, it can be used till October 2008. 2 New regulation CTE.
Several parameters are used to measure the isolation capacity of a wall. The
sound level difference D is the most intuitive one since it is the difference between the
sound level in the sending room and the receiving room. It is a global measure in the
sense that it includes all the aspects involved in the sound transmission problem: i)
net isolation capacity of the wall; ii) effect of room characteristics like the size, the

8 Introduction
absorption, or the position of the source; iii) sound caused by flanking transmissions.
Thus, the same wall has different values of sound level difference D depending on
other parameters (laboratory where it is tested or design of the building including the
furniture).
In order to have a measure more related only with the wall, the sound reduction
index R is defined. It is a logarithmic ratio between the incident acoustic power on
the wall (face of the sending room) and the transmitted acoustic power. It is also
known (with minor modifications) as transmission loss (ASTM E-90) in the US and
other countries. Both D and R are frequency-dependent parameters and are often
measured at each third octave band. More detailed definitions are given in Chapters 3
and 5 or Josse (1975); Beranek and Ver (1992). As shown in Table 1.1, there are other
parameters like DnT , which is a sound level difference measured with empty rooms
and corrected with a normalised reverberation time or R′w (ISO 717-1), which is a
scalar value characterising the wall (instead of a frequency-dependent parameter).
In the remainder of the thesis the sound level difference D and the sound reduction
index R are used as output parameters. D is used in Chapters 3 to 5, where the
discussion is not focused on the acoustic results but on the performance of methods.
The discussion on the influence of the acoustic absorption is done in Sections 5.5.1 and
6.5.1. In the other sections, where the attention is more focused on the application of
models, R is used as main output parameter.
1.4 Goals, scope and outline of the thesis
In Section 1.5 the vibroacoustic equations are presented with special emphasis on the
acoustic part of the problem. A review of the numerical techniques currently used in
order to solve these equations is done in Chapter 2. Classical methods that can be
used in the low-frequency range as well as new techniques trying to extend the use of
numerical methods to mid frequencies are considered.
In Chapter 3 a one-dimensional model for vibroacoustics is presented. Since it
deals with a very simplified situation, obtaining the analytical solution is possible.

1.4 Goals, scope and outline of the thesis 9
The model lies between the mass-law models that consider unbounded domains and
models considering the exact geometry (bounded domains). Finite acoustic domains
are considered and modal responses can be obtained. The analytical solutions are
used in order to check the two and three-dimensional codes developed for the thesis
(note that an exact check of a numerical solution cannot be done by means of wave-
based approaches). Approximate solutions and fast parametric analyses in order to
assess the sensitivity of sound isolation to each parameter can be done.
The performance of the block Gauss-Seidel algorithm for the linear system of
equations obtained after the discretisation of the vibroacoustic equations is analysed
in Chapter 4. Fluid-structure interaction problems often lead to matrices with a
particular block structure. Moreover, in the case of sound transmission, the coupling
between the fluid and the structure can be weak. These two aspects are exploited in
order to efficiently solve the systems of equations. The solver is modified in order to
deal with double walls and other structures where some of the acoustic domains are
strongly coupled. A selective coupling strategy is presented.
Some of the results presented in the thesis have been obtained by means of the
finite element method, the boundary element method or spectral methods. However,
they can be time-consuming for sound transmission problems (especially if the prob-
lem is three-dimensional). It also represents a limitation in the maximum frequency
analysed. A model where the cuboid-shaped acoustic domains are solved by means
of modal analysis (with available analytical solution) is presented in Chapter 5. The
analytical solutions are combined with finite elements (for the structure). The main
improvements done with respect to similar models already used are the generalisation
to more elaborate situations (it is not restricted to the study of sound transmission
through single walls and it is extended to the use in double walls, and flanking trans-
missions) and the use of the solver presented in Chapter 4 (which allows an adequate
treatment of strongly coupled situations). An analysis of the computational costs of
the model as well as the influence of some of the parameters is done.
This model is used in Chapter 6 in order to predict sound transmission in single
and double walls. In Chapter 7, the steel studs often used between the leaves of a

10 Introduction
double wall are characterised. Three-dimensional finite element models of laboratory
tests as well as two-dimensional models using spectral finite elements are used in
order to obtain values of spring stiffnesses characterising the transmission of vibrations
through the steel studs (at cross section level). In Chapter 8 flanking transmissions are
modelled. Comparisons of the predictions done by the EN-12354 model and numerical
results for the cases of L-shaped, T-shaped, and X-shaped junctions are presented.
The results shown have been obtained by means of the three-dimensional version of
the model presented in Chapter 5. In Chapter 9 the radiation efficiency of floors with
stiffeners is studied. Finally, the conclusions of the thesis and proposals for future
work are exposed in 10.
1.5 Review of vibroacoustics equations
1.5.1 The acoustic problem
The linear theory of sound will be used in order to describe the fluid (acoustic) domains
(Pierce (1981), Kinsler et al. (1990)). Air is considered as a perfect, compressible and
adiabatic fluid. Its weight is neglected and it is assumed that acoustic perturbations
cause small changes in displacement and velocity of fluid particles. The basic variables
of a fluid from a constitutive point of view are the total pressure PT and the total
density ρT . Both are described by means of a steady or mean value (P0 and ρ0) and
small variations (acoustic variables: P and ρ). The total acoustic velocity VVV T can
also be described in the same way
PT (xxx, t) = P0(xxx)+P (xxx, t); ρT (xxx, t) = ρ0(xxx)+ρ(xxx, t);VVV T (xxx, t) = VVV 0(xxx)+VVV (xxx, t) (1.1)
Conservation of mass and linear momentum laws can be rewritten in terms of acoustic
variables∂ρ(xxx, t)
∂t+ ρ0∇ ·VVV = 0 (1.2)

1.5 Review of vibroacoustics equations 11
∇P (xxx, t) = −ρ0∂VVV (xxx, t)
∂t(1.3)
An equation describing the physics between pressure and density is required. A linear
relationship between acoustic pressure and air density is assumed. Only the first term
in
P (ρ) =
(∂PT∂ρT
)
ρ0
ρ+1
2
(∂2PT∂ρ2
T
)
ρ0
ρ2 + . . . (1.4)
is considered. The constitutive equation for the acoustic fluid can be written as
P (xxx, t) = c2ρ(xxx, t) (1.5)
It can be shown (see for example Pierce (1981)) that c is the velocity of propagation of
waves in the fluid. It is a constant value for linear fluids. The constitutive relation (1.5)
can be introduced in Eqs. (1.2) and (1.3) in order to obtain the governing equation
of an acoustic fluid:
4P (xxx, t) =1
c2∂2P (xxx, t)
∂t2(1.6)
This is the wave equation, which is also the governing equation of other physical
phenomena. Boundary conditions are required to have a well-posed boundary value
problem. Defining the normal derivative as ∇nnn (•) = nnn · ∇ (•) (nnn is the fluid normal
vector), the Neumann boundary condition can be written as
∇nnnP (xxx, t) = −ρ0dVnnndt
(1.7)
It is used in order to impose a known value of normal velocity (Vnnn) in the contour. The
fluid velocity is related to the normal derivative of the pressure field by multiplying
Eq. (1.3) by the normal vector. The physical meaning of this boundary condition is
to have a vibrating surface in the acoustic domain. The Robin boundary condition
can be written as
∇nnnP (xxx, t) = −ρ0dΥP (xxx, t)
d t(1.8)

12 Introduction
In that case, the normal velocity in the boundary is an unknown value. Υ is a
parameter defining the Robin contour. Its physical meaning, when it is invariable
with time, is the relationship between the normal derivative of the pressure field and
the normal velocity. The Robin boundary condition is used in order to introduce
attenuation into the model. For the case of acoustic it is the absorption. Details and
discussions will be done in following chapters. The Dirichlet boundary condition
P (xxx, t) = Pd (1.9)
which is very usual in other physical problems, is rarely used in acoustics. A special
boundary condition (Sommerfeld radiation condition)
limr→∞
(r
nsd−1
2
(∂P
∂r+
1
c
∂P
∂t
))= 0 (1.10)
which ensures the uniqueness of the solution has to be imposed in the unbounded
acoustic domains. r is a radial coordinate and nsd the number of space dimensions.
The results presented in following chapters deal with bounded acoustic domains and
these last two boundary conditions have not been used.
The acoustic energy per unit volume is defined as
Ξ =1
2ρ0(VVV ·VVV )︸ ︷︷ ︸
kinetic
+1
2
P 2
ρ0c2︸ ︷︷ ︸potential
(1.11)
It can be interpreted as the kinetic energy of the fluid particles due to their oscillatory
movement and the potential energy due to the compression of the fluid (like if it was
an elastic spring). The conservation equation of acoustic energy is
∂Ξ
∂t+ ∇ · III = 0
∫
Ω
Ξ dΩ +
∫
∂Ω
III ·nnn dS = 0 (1.12)
Both differential and integral forms have been written. III = PVVV is the acoustic
intensity. It is a measure of the power flow per unit of surface. It is a vectorial

1.5 Review of vibroacoustics equations 13
variable since the flow is different in each direction.
1.5.1.1 Punctual sound sources. Non-homogeneous wave equation
Acoustic sources will not be modelled in detail (i.e. the shape of a loudspeaker and
how it can modify the radiation in several directions). Their effect in the acoustic
fluid is modelled by means of punctual sound sources. The parameter characterising
an acoustic sound source is the source-strength amplitude (Q). For the case of a
small sphere (radius r) vibrating in an unbounded medium, Q = 4πr2vr(t). It can be
interpreted as the volume of air displaced by the source per unit time.
Q =
∫
∂Ω
VnnndΓ (1.13)
The sound source has to be introduced in the differential equation (1.6). This leads
to the non-homogeneous wave equation (see for more details Kinsler et al. (1990))
4P (xxx, t) − 1
c2∂2P (xxx, t)
∂t2= −∂G(xxx, t)
∂t(1.14)
where G(xxx, t) is the injection/extraction of mass per unit time (its magnitude is
[G(xxx, t)] = M/TL3). For a punctual sound source, G can be defined with the aid
of the Dirac delta function: G(xxx, t) = G(t)δ(xxx0,xxx).
Integrating the Eq. (1.14) over a very small domain (which must include the sound
source) we obtain
−ρ0∂
∂t
∫
∂Ω
VnnndΓ − 1
c2
∫
Ω
∂2P
∂t2dΩ = −∂G(t)
∂t(1.15)
The domain of integration Ω can be as small as necessary. In the limit the volume
integral vanishes and G can be expressed as G(t) ' ρ0Q ([G(t)] = M/T).

14 Introduction
1.5.2 Acoustic problem types
The acoustic problems are often classified depending on their goals and boundary
conditions (Ochmann and Mechel (2002)). Every situation can model a wide group
of practical applications. The set of equations to be solved as well as its boundary
conditions are different in every problem type. This influences the choice of the
adequate numerical method. The acoustic problems can be classified as follows:
1. Exterior problem 1: Radiation
The study of the sound field generated by a sound source in an unbounded do-
main is known as the radiation problem (Fig. 1.2(a)). The Sommerfeld boundary
condition (1.10) has to be imposed at ΓINF in all the problems involving infinite
domains. The wave equation (1.6) will be solved in ΩEXT . The sound source is
usually modelled by means of a Neumann boundary condition (1.7), considering
a known imposed velocity.
The radiation efficiency (σ) of a sound source is a typical output of interest of
the radiation problem. It can be defined as
ρ0cS < V 2nnn > σ = P with P =
∮IIIdS (1.16)
P is the power of the source, S is the surface of of the radiating body and < V 2nnn >
is the space-average (along the vibration surface) value of the time-average vi-
bration velocity.
2. Exterior problem 2: Scattering
The response of a body inside an unbounded domain to an incoming sound wave
(Fig. 1.2(b)) is the solution of an scattering problem. The incoming wave has to
be known a priori and then the wave equation is solved in terms of the scattered
(reflections of the incident, Pin, wave in the body) wave: Ps = Ptotal − Pin. The
scattered pressure has to satisfy the Sommerfeld boundary condition (1.10) in
the exterior contour. In the interior contour the radiation boundary conditions

1.5 Review of vibroacoustics equations 15
have to be reformulated in terms of the scattered pressure. For the case of an
infinitely rigid body
∇nnnPtotal(xxx, t) = 0 ∀ xxx ∈ Γint ⇒ ∇nnnPs = −∇nnnPin ∀xxx ∈ Γint (1.17)
The target strength which is a ratio between the scattered and the incoming
intensities at a distance of 1 m is a typical result of the scattering problem.
3. Interior problem
An interior problem (Fig. 1.2(c)) is an acoustic problem solved inside a bounded
domain. Only Neumann, Robin and Dirichlet boundary conditions can be im-
posed. The main characteristic of the interior problems is their modal behaviour.
4. Vibroacoustic problem
Vibroacoustic problems are those with acoustic (fluid) and solid domains. The
acoustic domain is modelled by the governing equations presented in Section 1.5.1.
The solid domain is usually considered as a linear elastic solid with small strains
and displacements (this hypothesis will be sufficient for our purposes). The vi-
bration behaviour of the solid (due to pressure waves for example) is studied.
Continuity of normal velocities and pressures in the interface are imposed in
order to couple the solid and acoustic domains. The set of equations governing

16 Introduction
the vibroacoustic problem are
Acoustic domain:
4P (xxx, t) − 1
c2∂2P (xxx, t)
∂t2=
∑
s
−∂(Gs(t)δ(xxxs,xxx))
∂tin Ωac (1.18)
∇nnnP (xxx, t) = −ρ0dVnnndt
on ΓN (1.19)
∇nnnP (xxx, t) = −ρ0dΥP (xxx, t)
dton ΓR (1.20)
P (xxx, t) = PD on ΓD (1.21)
limr→∞
(r
nsd−1
2
(∂P
∂r+
1
c
∂P
∂t
))= 0 on ΓINF (1.22)
∇nnnP (xxx, t) = −ρ0d2(UUU ·nnn)
dt2on ΓFS (1.23)
Solid domain:
∇ · σ(xxx, t) = ρsolidd2UUU
dt2in Ωs (1.24)
σ = C : ∇sUUU in Ωs (1.25)
σ(xxx, t) · nnn = TTT (xxx, t) on ΓsN (1.26)
UUU(xxx, t) = UUUD on ΓsD (1.27)
σ(xxx, t) · nnn = −P (xxx, t)nnn on ΓsFS (1.28)
where UUU is the solid displacement (measured like in the case of acoustic pres-
sure as a variation from a reference configuration), σ is the Cauchy stress ten-
sor, ρsolid is the density of the solid, TTT is the vector of solid forces and UUUD
are the imposed displacements in the solid, and the deformation of the solid
is: ∇sUUU = 12(∇UUUT + UUU∇T ). nnn is the exterior normal for every domain (see
Fig. 1.2(d)). The weight of the solid is neglected because vibrations around the
deformed shape (due to self weight) are considered.

1.5 Review of vibroacoustics equations 17
5. Transmission problem
A particular case among all the vibroacoustic problems is the study of sound
transmission. A special mention to this physical situation is done because one of
the main goals of the present work is the study of sound transmission between
acoustic domains and through solids.
ΩINT
INTΓ
ΩEXT
Γ INF
(a)
ΩINT
INTΓ
ΩEXTpIN
Γ INF
pS
(b)
ΓN
Ω INT
Γ
Γ
D
R
(c)
ΓN
ΩINT
ΩS
ΓFS
Γ
Γ
D
Rt
n
n
(d)
Figure 1.2: Problem types in acoustics. (a) Radiation (b) Scattering (c) Interiorproblem (d) Vibroacoustic problem
1.5.3 Analysis in the frequency-domain: the Helmholtz equa-
tion
Physical phenomena like acoustic control, structural dynamics, marine engineering,
seismic engineering and electrical engineering have a common feature: its oscillatory

18 Introduction
time dependence. Temporal data is often post-processed in terms of Fourier series
which introduce the concepts of amplitude and frequency.
The solution methods for time-dependent phenomena can be classified in two
categories: time-domain and frequency-domain approaches. The choice depends on
several factors. In general, processes with transient time-dependence and with short
duration are studied in the time-domain. On the contrary, physical phenomena which
tend to be steady-harmonic and prolonged in time are usually studied in the frequency-
domain. Vibroacoustics and noise control are, in general, studied in the frequency-
domain. It will be the choice in this work. For example, an imposed normal velocity
(with periodicity T ) can be described as
Vnnn(t) =+∞∑
j=−∞
v(j)nnn ei
jπTt (1.29)
The temporal function Vnnn(t), has been transformed to discrete values of amplitude
v(j)nnn and pulsation, jπ/T . It can be done by means of a Fourier series for periodic
signals or a Fourier transform for arbitrary excitations. Details of these techniques
can be found in Smith (1997).
The main advantages of working in the frequency-domain are:
• Better understanding of physical phenomena. Parameters and responses are
frequency-dependent.
• The initial time-domain problem can be decomposed in several frequency-domain
problems which are simpler to solve. The time-domain solution can be recovered
by combining all the frequency-domain solutions.
• As discussed in Sections 1.5.1 and 1.5.2, we will deal with linear problems.
Superposition can be done without problems due to linearity.
We will assume all the variables of the problem to be steady-harmonic. Pressure
and displacements can then be expressed as
P (xxx, t) = Rep(xxx)eiωt
UUU(xxx, t) = Re
uuu(xxx)eiωt
(1.30)

1.5 Review of vibroacoustics equations 19
where p(xxx) ∈ C is the spatial variation of pressure (or its Fourier transform), and
uuu(xxx) ∈ C is the spatial variation of solid displacements (phasor).
The angular frequency (pulsation) of the steady-harmonic dependence is ω =
ωR + ωIi, where ωR = 2πf , being f the frequency. It has to be interpreted as an
harmonic oscillation and an exponential attenuation:
eiωt = eiωRt︸︷︷︸harmonic
· e−ωIt︸︷︷︸attenuation
(1.31)
The split decomposition for the basic unknowns (1.30) can now be used in order to
reformulate the vibroacoustic problem (Eqs. (1.18) to (1.28)) in the frequency-domain.
Acoustic domain:
4 p(xxx) + k2p(xxx) = −∑
s
iωgsδ(xxxs,xxx) in Ωac (1.32)
∇nnnp(xxx) = −iρ0ωvnnn on ΓN (1.33)
∇nnnp(xxx) = −iρ0ωAp(xxx) on ΓR (1.34)
p(xxx) = pd(xxx) on ΓD (1.35)
limr→∞
(r
nsd−1
2
(∂p
∂r+ ikp
))= 0 on ΓINF (1.36)
∇nnnp(xxx) = ρ0ω2(uuu · nnn) on ΓFS (1.37)
Solid domain:
∇ · σ(xxx) = −ρsolidω2uuu in Ωs (1.38)
σ(xxx) = C : ∇suuu in Ωs (1.39)
σ(xxx) · nnn = ttt(xxx, t) on ΓsN (1.40)
uuu(xxx) = uuud on ΓsD (1.41)
σ(xxx) · nnn = −p(xxx)nnn on ΓsFS (1.42)
The new governing equation (1.32) for the acoustic domains is the Helmholtz equation.
k = ω/c is the wave number. A is the admittance of the Robin contour and Z the
impedance: A = 1/Z = vnnn/p. A is a known frequency-dependent parameter. Note

20 Introduction
that the frequency ω is a known data of the problem. vnnn and q are the coefficients of
the Fourier decomposition and they are known values too. The only unknown of the
problem is p(xxx).
The discussion on the type of solutions obtained in the frequency domain is limited
for simplicity to the acoustic problem. The general problem Eqs. (1.32) to (1.35) is
split into an homogeneous problem
4phom(xxx) + k2phom(xxx) = 0 ∀xxx ∈ Ωac
∇nnnphom(xxx) = 0 ∀xxx ∈ ΓN
∇nnnphom(xxx) = −iρ0ωAphom(xxx) ∀xxx ∈ ΓR
phom(xxx) = 0 ∀xxx ∈ ΓD
limr→∞
(r
nsd−1
2
(∂phom∂r
+ ikphom
))= 0 ∀xxx ∈ ΓINF
(1.43)
and a particular problem
4pp(xxx) + k2pp(xxx) = −iρ0ω∑
s
qsδ(xxx,xxxs) ∀xxx ∈ Ωac
∇nnnpp(xxx) = −iρ0ωvnnn ∀xxx ∈ ΓN
∇nnnpp(xxx) = −iρ0ωApp(xxx) ∀xxx ∈ ΓR
pp(xxx) = pd(xxx) ∀xxx ∈ ΓD
limr→∞
(r
nsd−1
2
(∂pp∂r
+ ikpp
))= 0 ∀xxx ∈ ΓINF
(1.44)
The solution is split too: p(xxx) = pp(xxx) + phom(xxx).
If the given pulsation ω is not an eigenfrequency of the problem (1.43), the homo-
geneous solution will be null (phom(xxx) ≡ 0) and only the particular problem has to be
solved.
If no Robin boundary condition is used, the eigenfrequencies of problem (1.43)
can be pure real values. If our given pulsation ω (in general a pure real value) co-
incides with an eigenfrequency, more than an unique solution exists. Nevertheless, a
correct physical modelling always includes a Robin boundary condition (it has to be

1.5 Review of vibroacoustics equations 21
interpreted as the attenuation of the system). In that case the eigenfrequencies are
always complex values and the general problem always has a unique solution for the
pure real values of pulsation.
In the results presented in following chapters only the frequency response of the
vibroacoustic systems will be analysed. The most important outputs shown here
(sound reduction index, sound levels, radiation efficiencies, vibration levels) can be
understood in the frequency-domain. Time-dependent results are difficult to interpret
and very often meaningless. Moreover, some of the vibroacoustic parameters are
frequency-dependent (i.e. wall admittances). It would be different for the case of
transient phenomena like the reverberation time of rooms.
The eigenfrequencies of the problem (1.43) have been used in Chapter 5 in order to
solve the acoustic problem by means of modal analysis. The spatial description of the
solution is done by means of a basis composed of eigensolutions. This has physical
meaning and some orthogonality properties simplifies the solution of the problem.
Details on the modal analysis applied to acoustics can be found in Pierce (1981),
Kuttruff (1979) and Davidsson (2004).


Chapter 2
Review of numerical methods for
vibroacoustics
Numerical methods are a precise and rigorous tool in order to solve the vibroacoustic
equations. However, wave problems require a fine discretisation of the domains and
the resolution of multiple frequencies in order to obtain valid engineering results. This
causes numerical methods to be computationally expensive. Wave phenomena were
considered by Zienkiewicz (2000) as one of the open problems in the field of numerical
methods.
A very important aspect is the relationship between the expected wave lengths in
the solution and the physical dimensions of the studied domains. We distinguish then
between low-frequency and mid or high-frequency problems. In the first case there
is a small number of waves in the physical domain. The modal density is low and
the eigenfrequencies of the problem can be clearly distinguished. On the contrary, for
mid and high-frequency problems the wave length is small when compared with the
characteristic length of the problem and the modal density is high. This classification
is important from both a numerical and a modelling point of view. The physical
response is also different depending on the frequency.
This chapter is a review of numerical techniques for the vibroacoustic equations.
The discussion is slightly oriented to the field of sound transmission. Thereby more
23

24 Review of numerical methods for vibroacoustics
emphasis is put in problems formulated in the frequency domain and the extension of
numerical techniques to the mid-frequency range. The numerical methods discussed
here can be classified into two categories: the more consolidated methods mainly
used for low frequencies (Atalla and Bernhard (1994)) and the new methods under
development for mid and high frequencies (Desmet (2002)). The distinction between
methods used for acoustics (Helmholtz equation) and for structural dynamics is also
done.
2.1 Numerical methods for the low-frequency range
2.1.1 The finite element method (FEM)
2.1.1.1 Acoustics
Two main FEM formulations are used for acoustic problems. On the one hand the
mixed formulation where the acoustic medium is characterised by means of the acous-
tic pressure and velocity fields. On the other hand the classical formulation where the
unknown is only the acoustic pressure. Detailed descriptions of the available options
can be found in Stifkens (1995), Everstine (1997) and Junger (1997). Modifications
of the mixed formulation and formulations in which only displacements are employed
for both the acoustic and the solid domains can be found in Bathe et al. (1995),
Bermudez and Rodrıguez (1999) and Bermudez et al. (2000).
In the mixed formulation the coupling with solids is simpler due to the use of the
velocity in the acoustic domain as variable. Moreover, the acoustic intensity can be
obtained as a direct postprocess. However, it is more expensive because both the
pressure and the velocity fields have to be solved while in the classical formulation
the only unknown is the pressure. Velocity is a vectorial variable and two (2D) or
three (3D) degrees of freedom per node have to be added. The classical formulation
of acoustics will be considered from now on.
By applying the usual weighted residual approach, the strong form (1.32) is trans-

2.1 Numerical methods for the low-frequency range 25
formed into the weak form
∫
Ω
∇p · ∇ϕdΩ +
∫
ΓR
iρ0ωApϕdΓ −∫
Ω
k2pϕdΓ =
∫
Ω
iωρ0
∑
s
qsδ(xxx,xxxs)ϕdΩ −∫
ΓN
iρ0ωvnnnϕdΓ (2.1)
where ϕ is the test function. A typical FEM interpolation is used (Zienkiewicz and
Taylor (2000), Mathur et al. (2001)),
p(xxx) =nac∑
j=1
Nj (xxx) pj ; pj ∈ C ; Nj : Rnsd 7→ R (2.2)
Using the Galerkin formulation, the discretised form of the acoustic problem can be
written as(Kac + iωCac − ω2Mac
)p = fac (2.3)
where Mac,Cac,Kac are the mass, absorption and stiffness matrices defined as
(Kac)ij =
∫
Ω
∇Ni · ∇NjdΩ (2.4)
(Cac)ij =
∫
ΓR
ρ0ANiNjdΓ (2.5)
(Mac)ij =1
c2
∫
Ω
NiNjdΩ (2.6)
Kac and Mac are the usual, real-valued, stiffness and mass matrices (with the
only difference that Mac is multiplied by 1/c2 and Kac can be multiplied by 1 +
ηi if hysteretic damping is considered). Cac makes necessary the use of complex
arithmetics because A is a complex value. The force vector takes into account two
sound sources: vibrating panels (non-homogeneous Neumann boundary condition)

26 Review of numerical methods for vibroacoustics
and punctual sources
(fac)i = iρ0ω∑
s
∫
Ω
qsδ(xxx,xxxs)NidΩ −∫
Γn
iρ0ωNivnnndΓ (2.7)
2.1.1.2 Structural dynamics
Finite elements have been widely used for solid mechanics and structural problems.
Details on the use of FEM for solid and structural dynamics can be found in Argyris
and Mlejnek (1991), Clough and Penzien (1993), Hughes (1987), Bathe (1996) and
Zienkiewicz and Taylor (2000).
2.1.2 The boundary element method (BEM)
2.1.2.1 Acoustics
The other low-frequency method considered here is the boundary element method
(BEM). A general overview of the method can be found in Chen and Zhou (1992),
Brebbia and Domınguez (1992), Hunter and Pullan (1997) and Bonnet (1999). More
specific descriptions of the BEM oriented to acoustic problems can be found in
Ciskowski and Brebbia (1991), Von Estorff (2000), Kirkup (2007) and Shaw (1988).
Even if a complete discretisation of the domain is not required by BEM (only bound-
aries are discretised), FEM is more popular and more widely used (especially for
structural problems). The use of BEM for nonlinear problems and in heterogeneous
domains can be quite complicated (with respect to FEM). However, BEM has very
interesting properties for the acoustic problem. It seems to be a numerical method
especially designed to deal with the Helmholtz equation.
The direct version of the BEM can be formulated beginning with the integral
equation
∫
Ω
p4ϕdΩ −∫
Ω
ϕ4pdΩ +
∫
∂Ω
ϕ∇nnnpdΓ −∫
∂Ω
p∇nnnϕdΓ = 0 (2.8)
For the case of the Helmholtz equation it can be obtained by means of a double

2.1 Numerical methods for the low-frequency range 27
application of the Green-Gauss theorem. BEM requires a fundamental solution. It is
the Green function of the problem in an unbounded domain. This is the solution of
the governing equation when a punctual force is acting in our domain. The force can
be a mechanical force, a heat source, a punctual sound source,. . . depending on the
problem type. Boundary conditions do not have to be satisfied by the fundamental
solution. For the case of the Helmholtz equation the fundamental solution Ψ satisfies
4Ψ(xxx,xxx0) + k2Ψ(xxx,xxx0) = δ(xxx− xxx0) (2.9)
The expression of Ψ for the two-dimensional Helmholtz problem is
Ψ(xxx,xxx0) =H
(2)0 (kr)
4i(2.10)
where H(2)0 is the Hankel function of second kind (H
(2)n (z) = Jn(z)−iYn(z)). Jn and Yn
are the n-order Bessel functions of first and second kind. And for a three-dimensional
Helmholtz problem
Ψ(xxx,xxx0) =e−ikr
4πr(2.11)
where r is the distance between xxx and xxx0.
In order to reduce the formulation of the problem to the boundary, the test function
ϕ in Eq. (2.8) is replaced by the fundamental solution The following property can
now be used: Ψ(xxx,xxx0)4p(xxx)− p(xxx)4Ψ(xxx,xxx0) = δ(xxx−xxx0). It can be obtained by the
addition of Ψ times the homogeneous Helmholtz equation plus −p times Eq. (2.9).
Finally the boundary integral equation for the homogeneous Helmholtz equation is
∫
∂Ω
p(xxx)∇nnnΨ(xxx,xxx0)dΓ −∫
∂Ω
Ψ(xxx,xxx0)∇nnnp(xxx)dΓ =
∫
Ω
p(xxx)δ(xxx− xxx0)dΩ (2.12)
The volume integral can be computed analytically:
∫
Ω
p(xxx)δ(xxx− xxx0)dΩ = ς(xxx0)p(xxx0) ∀xxx ∈ Ω (2.13)
The value of ς(xxx0) depends on the location of xxx0 (inside the domain or at the boundary)

28 Review of numerical methods for vibroacoustics
and on the type of boundary (smooth or if xxx0 is a corner in an angular boundary).
Eqs. (2.1) and (2.12) are the basis of the discretisation process in FEM and BEM
respectively. Note that while in Eq. (2.1) there are volume and surface integrals,
Eq. (2.12) only contains surface integrals. In FEM the unknown variable is p in the
whole domain while in BEM we have p and ∇nnnp at the boundaries. Finally, the role
of the FEM test function is assumed by the fundamental solution Ψ in BEM.
Once the weak formulation and the fundamental solution are known, a discretisa-
tion of the boundary can be done. The discretisation procedure is similar for FEM
and BEM. In BEM, not only the variable p is discretised but also its normal derivative
p(xxx) =
nod∑
j=1
Nj(xxx)pj ; ∇nnnp(xxx) =
nod∑
j=1
Nj(xxx) (pnnn)j (2.14)
Considering xxx0 of Eq. (2.12) to be every node in the boundary a linear system of
equations can be obtained
(A− ςI)p = Bpnnn (2.15)
where
(A)ij =
∫
∂Ω
∇nnnΨ(xxx,xxxi)Nj(xxx) dS (2.16)
(B)ij =
∫
∂Ω
Ψ(xxx,xxxi)Nj(xxx) dS (2.17)
(ς)ij = δijς(xxxi) (2.18)
It should be noted that matrix coefficients are complex numbers (like the fundamental
solutions). In addition, matrices are full and non-symmetric. Some usual linear solvers
for banded matrices (typical of FEM) cannot be used. Harari and Hughes (1992)
carried out a comparative study of the computational costs of solving both types of
matrices (large, symmetric, banded matrices in FEM versus small, non-symmetric,
full matrices in BEM). They concluded that although matrices derived from FEM are
larger, numerical solvers can be faster and sometimes it is more efficient to deal with

2.1 Numerical methods for the low-frequency range 29
a larger matrix but that has an a priori known structure (banded in that case). In
any case, the choice between FEM and BEM depends on the type of problem (where
other aspects different from the numerical cost of solving the linear system of equations
will be considered) and especially on the personal preference. All these considerations
have to be modified for vibroacoustic problems. Due to the fluid-structure interaction,
FEM matrices are no longer banded. The choice of the more adequate solver depends
on other factors (i.e. degree of coupling, type of formulation of the problem, ...)
A critical issue in the BEM is the computation of the integrals in Eqs. (2.16) and
(2.17). Singularities due to the fundamental solutions used can be found (especially
for diagonal coefficients). Moreover, for the case of Helmholtz equation fundamental
solutions are oscillatory. Several options are available. The first option is to use Gauss
quadratures of adaptive order. The number of Gauss points is changed depending on
the distance to the singularity and the wave length. This option is not the most
efficient one but can be implemented without major difficulties. Another option is to
develop specific quadratures to deal with the singularities of the fundamental solu-
tions. This has been done in Ozgener and Ozgener (2000). For more general methods
on integration of singular and oscillatory functions, see Milovanovic (1998). Finally,
the fundamental solutions can be approximated by an analytical expression around
the singularity (i.e. by means of Taylor series). The integration in that case is done
analytically. An example of this technique can be found in Ramesh and Lean (1991).
The complete solution of the problem is split in two steps. First the boundary is
solved and once variables on the boundary are known the values of the solution inside
the domain can be evaluated. This is one of the main advantages of BEM. Only the
boundary and the interesting points in the domain (and not all the domain) have to
be solved. Only in the first step a system of linear equations has to be solved. The
evaluations of the variable in the interior of the domain requires as major task the
computation of integrals (2.16) and (2.17). xxxi is now the position of the interior point
where the solution will be evaluated.
The modifications to be done in Eq. (2.15) in order to take into account the
boundary conditions are simpler than in other problems because Dirichlet boundary

30 Review of numerical methods for vibroacoustics
conditions are rarely used in acoustics. Then, p is always unknown.
It is in general more difficult to solve non-homogeneous equations with BEM (i.e.
Poisson problem 4ψ(xxx) = g(xxx)). The force term in the integral formulation has to be
evaluated by means of a volume integral which is an important break down within the
philosophy and the general organisation of the method. However, it is not a problem
for the case of punctual sound sources. The integration of a Dirac-delta is directly
done. The new force term in the integral (2.13) is
ς(xxx0)p(xxx0) −∑
s
iρ0ωqsΨ(xxxs,xxx0) ∀xxx ∈ Ω (2.19)
BEM is less adequate than FEM for the eigenfrequency analysis of the acoustic prob-
lem. In FEM, the problem can be formulated in terms of mass, stiffness and absorption
matrices. The pulsation ω of the problem can be isolated. On the contrary, in BEM,
the fundamental solutions include the frequency parameter and the classical matrix
formulation of the eigenvalue problem is not obtained. Special eigenvalue techniques
must be used. An example of a purely numerical technique for transcendental eigen-
problems 1 is found in Zhaohui et al. (2004). A review of the techniques based in the
modification of BEM formulations for eigenvalue analysis is done in Ali et al. (1995).
Two of them are the Internal cell method (Ciskowski and Brebbia (1991)) and the
Dual reciprocity method (Partridge et al. (1992)). In the first case the Helmholtz
problem is considered as a Laplace problem. The main difficulty is that the mass con-
tributions require volume integrals (all the other parts of the problem can be reduced
to the boundary using the fundamental solution of the Laplace problem). The dual
reciprocity method reduces the eigenvalue problem to the boundary by interpolating
the solution (eigenfunctions) by means of harmonic shape functions.
1An eigenvalue problem where the eigenvalue parameter is included in the formulation of matricesand cannot be isolated analytically.

2.1 Numerical methods for the low-frequency range 31
2.1.2.2 Structural dynamics
BEM has also been used for solid mechanics in Domınguez (1993) and structural
dynamics (see for example Providakis and Beskos (1989) and Palermo (2007)). How-
ever, the most common option is to use FEM for the structural part of the problem.
Formulations are simpler and the use of structural finite elements better established.
There are also more software and libraries available.
2.1.3 Numerical techniques for the coupled problem
Two possibilities will be considered in this short review of vibroacoustic formulations
for low frequencies. On the one hand, using FEM for both the acoustic and the
structural domain and on the other hand using FEM for the structural domain and
BEM for the acoustic domain.
2.1.3.1 FEM-FEM
Assuming that the structural problem is linear elastic and can also be formulated in
the frequency domain, it can be written in matrix form as
(Ks + iωCs − ω2Ms
)u = fs (2.20)
where Ms, Cs and Ks are the mass, damping and stiffness matrices. Their particular
expression depends on the specific structural formulation. fs is the vector of structural
forces and u the vector of structural displacements (and rotations).
If this structural problem is coupled with the FEM formulation of the acoustic
problem presented in Section 2.1.1, the global system is
[ω2
(−Ms 0
ρ0LFS −Mac
)+ iω
(Cs 0
0 Cac
)+
(Ks −LSF
0 Kac
)]u
p
=
fs
fac
(2.21)
LFS and LSF are the coupling matrices. LFS takes into account the effect of the
structure over the acoustic fluid. The structural vibration causes an imposed normal

32 Review of numerical methods for vibroacoustics
velocity in the acoustic contour (boundary condition of Eq. (1.37)). Only normal
continuity of displacement is imposed and the tangential effects are not taken into
account due to the lack of viscosity of the acoustic fluid.
The interaction with the structure adds an integral in the left-hand-side of the
weak formulation of the acoustic problem (2.1)
∇nnnp(xxx) = ρ0ω2(uuu ·nnn) =⇒
∫
ΓFS
ρ0ω2ϕ(uuu · nnn)dΓ (2.22)
note that nnn is here the outward unit normal with respect to the acoustic domain. If
the structural displacement field is interpolated as
uuu(xxx) =ns∑
j
Nj(xxx) · uuuj (2.23)
where Nj are the shape functions and a Galerkin formulation is also used for the
structure, the expression of the acoustic nodal forces due to the vibroacoustic coupling
is
(fFS)i = −ρ0ω2ns∑
j
(∫
ΓFS
−Naci (nnn · Nj)dΓ
)
︸ ︷︷ ︸(LFS)ij
uj (2.24)
where (LFS)ij is the sub-matrix that links the acoustic force in node i with the struc-
tural displacements of the structural node j.
LSF takes into account the effect of the acoustic fluid over the structure. The
contribution of the acoustic pressure of node j to the mechanical force of the structural
node i can be expressed as
(fSF )i =nac∑
j
(∫
ΓFS
Ni · (−nnn)Nacj dΓ
)
︸ ︷︷ ︸(LSF )ij
pj (2.25)
Note that LFS = LTSF .
The first examples of the use of finite elements for acoustic and vibroacoustic
problems are usually related to automotive applications. Car cabins are much smaller

2.1 Numerical methods for the low-frequency range 33
than rooms in laboratories or apartments, so the computational cost of the simula-
tion is also much smaller. Car designers have always been interested in the control
of the resonances in the car cabin at low frequencies, which is a problem where de-
terministic models based in the numerical resolution of vibroacoustic equations can
contribute with more detailed information than other modelling approaches (i.e. pres-
sure distribution in a cabin for frequencies closer to a resonance). In Craggs (1972)
the eigenfrequencies of a car cabin are calculated. The sound transmission between
the motor cavity and the car cabin is modelled in Craggs (1973). Flanking or indirect
paths are included in the analysis. The same author performs a vibroacoustic mod-
elling in the time domain of a plate radiating sound inside a room (Craggs (1971)).
Later, Ramakrishnan and Koval (1987) use finite elements to study the sound trans-
mission through a plate. The excitation pressure wave is imposed by means of an
analytical formula while the receiving room is modelled with finite elements. Kang
and Bolton (1996) use two-dimensional finite element models to study sound trans-
mission through single and layered structures. Absorbent materials are also modelled.
The dimensions of the studied systems are small. The modelling of absorbent mate-
rials is a field where finite elements have often been used. In Panneton and Atalla
(1996) and Panneton and Atalla (1997) the modelling effort is concentrated only in
the solid, a piece of absorbent material with or without solid layers. More recently, in
Maluski and Gibbs (2000), finite elements have been used for building acoustics. The
sound transmission through partitions is modelled. The attention is focused on low
frequencies and the modal response. Validation with a reduced scale model is done.
In Maluski and Gibbs (2004) the effect of room sizes and room absorption in the
sound reduction index is checked. The effect of the room absorption is also studied
in Melo et al. (2002). The reported results are in the low-frequency range and have
been obtained using the commercial software Sysnoise.
The courage and effort of the first users of finite elements for vibroacoustic prob-
lems is admirable. The computational resources in the 70’s or even in the beginning
of the 90’s cannot be compared with today’s computers.

34 Review of numerical methods for vibroacoustics
2.1.3.2 FEM-BEM
The other coupling possibility that is often considered for vibroacoustic problems is
the use of BEM for the acoustic part and FEM for the structural part. The idea
is to combine the interesting properties of BEM for acoustics (facilities to deal with
unbounded domains and reduction of the dimension of the problem to the boundary)
with the well established FEM formulations, solid/beam/shell elements and imple-
mentations for the structural part of the problem. Moreover, the disadvantage of
BEM with respect to FEM due to the type of matrices obtained is not so important
in a vibroacoustic problem, where other aspects influence the structure of the global
matrix (i.e. type of variables chosen for the description of each domain, and the use
or not of a block solver or a semi-decoupled approach).
The two matrices modelling the coupling between a FEM structural domain and
the BEM acoustic fluid have to be reformulated. In order to take into account the
force of the fluid over the solid the correct shape functions for the acoustic part have
to be considered: while in Eq. (2.25) the finite element shape functions reduced to
the boundary are used, here the boundary element interpolation of the pressure in
the boundary NBEMj is considered
(fSF )i =ns∑
j
(∫
ΓFS
Ni · (−nnn)NBEMj dΓ
)
︸ ︷︷ ︸(LBEM
SF)ij
pj (2.26)
On the other hand the acoustic force in node i due to the structural displacement of
node j can be obtained by means of
(fFS)i =
∫
∂Ω
Ψ(xxx,xxxi) (∇nnnp(xxx)) dS = ρ0ω2
ns∑
j
(∫
ΓFS
Ψ(xxx,xxxi)(nnn · Nj)dΓ
)
︸ ︷︷ ︸(LBEM
FS)ij
uj (2.27)
Note that while in Eq. (2.24), Ni was the acoustic test function here the fundamental
solution Ψ has to be used.

2.1 Numerical methods for the low-frequency range 35
The system of linear equations to be solved for FEM-BEM coupling is
((ω2Ms + ωCs + Ks) −LBEM
SF 0
−ρ0ω2LBEM
FS A −B
)
u
p
pnnn
=
fs
fac
(2.28)
Examples of FEM-BEM coupling applied to vibroacoustics can be found in Wu and
Dandapani (1994). The sound transmission between two rooms and from the interior
to the exterior of an sphere is modelled. In Suzuki et al. (1989) the numerical model
is used in order to predict the response of car, aircraft or train cabins. Interesting
numerical details are also shown. On the one hand, boundaries with vibroacoustic
coupling (fluid-solid interaction) and absorption (Robin boundary condition) are con-
sidered. On the other hand comparison between coupled and uncoupled results are
shown. Finally, in Coyette (1999) layered solids as well as absorbent materials placed
inside are modelled by means of finite elements. The rectangular structure is baffled
and the radiation is calculated by means of BEM.
The criteria in order to decide the element size of the meshes for the fluid and
structure domains depend on the length of waves in the medium. The wave lengths
depend on the physical properties of the medium. Then, in both types of couplings
reviewed here, meshes for the structural and for the acoustic part of the problem
can be different. The possibility of working with nonconforming meshes is desirable.
On the one hand, having different element sizes at each side of the coupling contour
minimise the total number of elements used (avoid a size transition zone around
the coupling boundary). On the other hand the meshing construction procedure is
simplified and it can be done faster. To deal with nonconforming meshes has to be
taken into account in the implementation of the coupling matrices as well as in the
integration procedures of them.

36 Review of numerical methods for vibroacoustics
2.2 Numerical methods for the mid-frequency ran-
ge
Errors in Helmholtz equation differ from errors in static linear elasticity or heat prop-
agation problems. In these problems the error is local and concentrated around singu-
larities of the domain (i.e. corners, stiffeners of a structure,...) or boundary conditions
(i.e. supports of a structure or punctual sources). Very often the solution has high
gradients only in some parts of the domain and the error does not propagate from
one zone to another. In the Helmholtz problem it is completely different. The error
is global and it propagates all around the domain due to the nature of the differential
operator. Geometrical singularities or boundary conditions can also be a source of
error, especially at low frequencies. The study, prediction and estimation of error
in Helmholtz equation must differ from the techniques used for elastostatics or heat
propagation problems.
In the field of numerical acoustics, a usual rule of thumb is that six linear fi-
nite elements per wave length are enough in order to obtain accurate results. It is
a frequency-dependent criterion since wave length depends on the frequency of the
problem and the physical properties of the studied media. The wave length can be
calculated as the length of a wave propagating in an unbounded medium or the wave
length of the nearest eigenfrequency. Using this criterion it can be seen that the
computational costs soon become unaffordable. The maximum calculable frequency
is often too small.
More detailed analyses (Ihlenburg (1998), Ihlenburg and Babuska (1997)) predict
that the interpolation error for linear elements can be estimated as
|p− pI |1|p|1
= Clocalkh (2.29)
where k = k`char and h = h/`char are dimensionless wave number and element size,
`char is a characteristic length of the problem, Clocal is a constant that depends on
each particular situation but it is independent of k and h, p is the exact solution and

2.2 Numerical methods for the mid-frequency range 37
pI is an interpolation of p. The six-elements-per-wave-length rule of thumb only takes
into account this local interpolation error. Nevertheless, two additional phenomena
make this criterion insufficient: the dispersion effect (k-singularity) and the existence
of eigenfrequencies of the equation (λ-singularity) (Bouillard and Ihlenburg (1999)).
The wave number of the numerical solution has been proved to be different from
the exact wave number in the Helmholtz equation (for a linear one-dimensional finite
element solution of Helmholtz equation we have knumerical = k − bk3bh2
24+ o(k5h4)).
This causes an increasing phase shift of the discrete solution. The error affects all
the domain. Due to dispersion, a numerical solution obtained by keeping constant kh
would have more error for high frequencies. The increase of error due to the increase of
dimensionless wave number k is known as pollution effect (Deraemaeker et al. (1999)).
Introducing the numerical wave number (affected by dispersion error) in the anal-
ysis, an expression for the total error can be obtained as
|p− ph|1|p|1
≤ C1
(kh
2p
)p
+ C2k
(kh
2p
)2p
kh < 1 (2.30)
ph is the numerical solution obtained by FEM. C1 and C2 are constants that should be
calculated for each particular situation (but they are independent of k and h) and p
the degree of polynomial interpolation. This is an important drawback because these
a priori error estimates give a tendency but the mesh should be correctly designed
for each problem. Note that in Eq. (2.30) we can associate the first term (multiplied
by C1) with the interpolation or local error (eI = (p− pI) /p) and the second term
(multiplied by C2) with the pollution error (epol =(pI − ph
)/p). The errors become
large also around the natural frequencies of the problem. This is especially important
for high frequencies and for undamped problems.
Interpolation errors, pollution effect and the effect of eigenfrequencies implies the
use of fine meshes and thereby the increase of computational costs. This is a limitation
(in frequency) on the use of numerical methods (especially FEM). In the remainder of
this chapter, some of the techniques recently developed in order to extend numerical
techniques to the mid-frequency range will be presented.

38 Review of numerical methods for vibroacoustics
2.2.1 Acoustic problems
2.2.1.1 Knowledge-based FEM
Knowledge-based FEM are a group of techniques that incorporate a priori known
information of the problem in the finite element method. This information is in general
based in the fact that we expect an oscillatory solution. On the one hand we have
the stabilisation techniques: Galerkin least-squares (GLS), Galerkin gradient least-
squares (G∇LS) and Galerkin generalised least-squares (GGLS). All of them introduce
additional parameters at weak formulation level in order to relax the equations. The
modification of numerical integration rules in order to reduce dispersion proposed by
Guddati and Yue (2004) has also been included in this group. On the other hand the
discontinuous Galerkin (DG) method and the partition of unity method (PUM). In
both techniques the interpolation basis can be enriched with trigonometric functions
(i.e. plane waves). These enrichment functions are similar to the expected solution
and can be exactly interpolated.
Stabilisation techniques Several attempts have been done in order to obtain a dis-
persion-free version of the FEM (see Harari (1997)). All of them introduce artificial
and more or less arbitrary terms in the weak formulation (Eq. (2.1)) of the problem
a(ϕ, ph) = (ϕ, f ac). They are not required from the point of view of the governing
equations but can be used in order to control the dispersion error (it is only a numerical
modification). However, the typical structure of the finite element procedures remains
unaltered. The existing FEM codes can be recycled. It is a common advantage of the
stabilisation techniques presented here.
In the GLS stabilisation, the modified weak formulation is written as
a(ϕ, ph) +
∫
Ω
τL(ϕ)rhdΩ = (ϕ, f ac) (2.31)
where rh is the residual, defined as rh = L(ph) − f ac. L() is the Helmholtz operator.
The residual vanishes if the discrete solution exactly satisfies the governing equations
(i.e. consistent stabilisation). In that case, the classical weak form of the problem is

2.2 Numerical methods for the mid-frequency range 39
recovered. The new parameter τ is an arbitrary constant. Its value can change from
element to element and it is chosen in order to reduce the dispersion error.
As we can see in Thompson and Pinsky (1995), numerical experiments can be
done in order to determine an optimal value for τ . In the one-dimensional Helmholtz
equation values of τ which lead to a nondispersive solution can be obtained. However,
this is not possible, in general, for a two or three-dimensional problems.
A variation of the GLS is the Galerkin gradient least-squares, G∇LS (Harari (1997)
and references therein). They are very similar methods but now the modification for
the weak formulation is done by means of the gradient of residual terms
a(ϕ, ph) +
∫
Ω
τ∇∇L(ϕ)∇rhdΩ = (ϕ, f ac) (2.32)
It seems to be a method more adequate for elastic waves in solids than for acoustic
problems. A third option is the Galerkin generalised least squares (GGLS) (Grosh
and Pinsky (1998)). The weak formulation is
a(ϕ, ph) +
nh∑
i=1
∫
Ω
(hiL(ϕ))(hirh)dΩ = (ϕ, f ac) (2.33)
where nh is the number of parameters (hi). It is arbitrary. The GGLS is like a
generalisation of the previous methods. GLS and G∇LS can be recovered defining
hi =√τ or hi =
√τ∇ respectively.
All the stabilisation techniques improve the standard FEM formulation and the
range of frequencies that can be solved is larger. However, two important drawbacks
have to be mentioned. On the one hand, the method is still based on a discretisation
of the domain and a finite element mesh is required. Sooner or later the computa-
tional cost due to the number of nodes becomes unaffordable. On the other hand the
constants appearing in the new weak formulation have to be calibrated by means of
a numerical experiments. The dispersion error cannot be completely eliminated even
for a good calibration of the constants.
A different idea in order to reduce the dispersion error of the numerical solution

40 Review of numerical methods for vibroacoustics
has been presented first in Guddati and Yue (2004) for the case of time harmonic
acoustics (frequency domain) and afterwards in Yue and Guddati (2005) for a time-
domain analysis. The dispersion is there reduced by shifting the local coordinates
of the integration points in Gauss-Legendre quadratures. The numerical solutions
obtained with these modified finite elements have a considerably better convergence.
The modifications required in a FEM code are very small since only the integration
points must be shifted. Moreover the method is more effective and general than
stabilisation techniques.
Discontinuous Galerkin Discontinuous Galerkin methods are mainly used for fluid
mechanics problems (the general aspects of the the technique can be found in Cock-
burn (2003)). The weak formulation of the problem is considered for every single
element. This is completed with the physical boundary conditions (for the elements
at the boundary) and an imposed weak continuity between elements. It adds ad-
ditional terms in the weak formulation of each element that can be understood as
numerical fluxes.
The method has also been used for the Helmholtz equation. In Benitez Alvarez
et al. (2006), the numerical flux between elements is defined in order to reduce the
dispersion error of the solution. Several analytical problems are solved in order to
determine the optimal numerical parameters. An interesting property of DG methods
is that the interpolation space can be different in each element (continuity of the shape
functions between elements is not required). In Farhat et al. (2003) plane waves are
used in each element and the weak continuity between them is imposed by means of
Lagrange multipliers.
Partition of unity method The partition of unity method (PUM, Babuska and Me-
lenk (1997)) can be seen as a generalisation of the FEM. The interpolation space can
be easily customised. Considering the case of the Helmholtz equation, plane waves
travelling in a direction θ can be used as enrichment functions:
Fj(xxx) = eiknnnjxxx = eik(x cos θj+y sin θj) (2.34)

2.2 Numerical methods for the mid-frequency range 41
Although this leads to the exact solution for the one-dimensional Helmholtz equation,
it is not the situation for two or three-dimensional domains. An infinite number of
plane waves (different propagation directions) would be needed.
The weak formulation of the problem can now be discretised using the interpo-
lation defined above. Some features of FEM are kept (banded matrices). However
specific integration schemes have to be used. The interpolation coefficients lose their
physical meaning (nodal pressures). This makes more difficult imposing boundary
conditions, the coupling with solids and the postprocess of the solution. The num-
ber of equations is increased too. In general, more than one coefficient per node is
required. Modifications are often required when defining the interpolation basis in
order to avoid singularities of the system of linear equations.
2.2.1.2 Mesh-free methods
Mesh-free methods are an alternative technique in order to solve partial differential
equations. In Liu (2003), Fernandez-Mendez (2001) and Huerta et al. (2004) a com-
plete description of these methods is done. They are younger than FEM and not yet
widely used for industrial applications. The discussion here will be focused on the
formulations using the moving-least-squares interpolation (MLS).
Mesh-free methods have specific properties. A true mesh is not required. It is
enough to define a background grid to carry out numerical integration and establish
relationships between the points in the cloud. Adaptivity can be done in an easier
way by simply adding new points. Dirichlet boundary conditions, one of the main
difficulties of mesh-free methods, are rarely imposed in vibroacoustics. And the most
interesting property for the particular case of the Helmholtz equation: shape functions
can be customised in a natural way. In the moving-least-squares interpolation, shape
functions are generated in order to be able to exactly interpolate a functional space. A
typical interpolation space is the polynomials of degree 2. In that case the functional
space is defined as: P (xxx) = (1, x, y, x2, y2, xy)T.
Bouillard and Suleau (1998) showed that even in the standard version of MLS
formulation, where the functional basis is a polynomial basis, the mesh-free methods

42 Review of numerical methods for vibroacoustics
are less dispersive than FEM. In Suleau et al. (2000), the interpolation basis is enriched
with trigonometric functions:
P T (x) =< 1, cos(kx), sin(kx) > (2.35)
With this basis, the exact solution is obtained in 1D problems. For two-dimensional
problems the following basis has been used:
P T (xxx) =< 1, cos(k cos(θ)x + k sin(θ)y), sin(k cos(θ)x + k sin(θ)y),
cos(−k cos(θ)x + k sin(θ)y), sin(−k cos(θ)x+ k sin(θ)y) >(2.36)
This leads to frequency-dependent shape functions that can interpolate plane waves
(the direction depends on the angle θ). The number of plane waves in the basis can
be increased in order to reduce errors.
In a first approach, a finite number of directions was used. This idea has been
generalised in Lacroix et al. (2003) where now the basis is defined as
P T (xxx) =< 1, cos(θ∗(xxx)), sin(θ∗(xxx)) > (2.37)
where θ∗(xxx) is an unknown angle and can be different for every position of the domain.
An iterative procedure is proposed in order to chose the correct function θ∗(xxx) that
minimises the dispersion error. Results are successful but the procedure can be quite
expensive.
2.2.1.3 Trefftz methods
The original Trefftz method can be used in order to solve boundary value problems.
It is less popular than FEM or BEM and also less flexible. However, it has interesting
properties and can be more efficient than FEM and BEM for mid and high frequencies.
A mesh of the domain is not required, so this approach can be regarded as a boundary
method. An overview of the Trefftz method can be found in Kita and Kamiya (1995).
A set of functions that satisfy the homogeneous differential equation is required

2.2 Numerical methods for the mid-frequency range 43
(note that nothing is said about the boundary conditions). They are called T-complete
systems and examples of them can be found in Kita and Kamiya (1995) or Cheung
et al. (1991). This functions are different for each differential equation. For the
two-dimensional Helmholtz equation
tC =
Jn(kr)e
inθ
n = 0, 1, 2, ... (2.38)
where Jn are the Bessel functions of the first kind and order n, and r and θ polar co-
ordinates. T-functions have to be independent of the geometry. A particular solution
of the non-homogeneous equation is also required.
In the indirect version of the Trefftz method, the numerical solution is interpolated
by means of the set of T-complete functions and the particular solution. The discrete
solution exactly satisfies (by construction) the differential equation inside the domain,
but not the boundary conditions. An error function can be defined with the residuals
for the Dirichlet, Neumann and Robin contours. The unknown coefficients of the
discrete function can be determined by minimisation of this error function. Punctual
collocation, least-square and Galerkin versions of the minimisation procedure have
been used. A direct version of the Trefftz method also exists. It is more similar to
BEM and variables are only interpolated at boundaries.
An element-based version of the Trefftz method is included in the overview by
Jirousek and Wrolewski (1995). A partition of the domain with softer requirements
than a finite element mesh is needed. The subregions can be distorted but they must
cover all the domain. T-elements can be used to solve both structural mechanics
problems (Jirousek and Wrolewski (1996)) and Poisson, Laplace or Helmholtz equa-
tions (Jirousek and Stojek (1995)). T-complete functions using local polar coordinates
are used in order to interpolate the variable inside the element. Continuity between
elements and boundary conditions must be imposed. The most common technique
are the so-called hybrid T-elements where an interface variable is defined in order to
impose continuity (Jirousek and Zielinski (1997)). However, it can also be imposed
by means of least-squares. T-elements imposing continuity in that way have been

44 Review of numerical methods for vibroacoustics
successfully used for Helmholtz equation in Stojek (1998).
A more specific approach called the wave based prediction technique has also been
used for vibroacoustic problems. The physical domains should be inserted in a box
being as small as possible. It is used in order to define a set of plane waves travelling
in different directions and that are solutions of the acoustic or structural dynamic
problems. They are used as interpolating functions. The unknown coefficients are
obtained after the minimisation of the errors at boundaries (using for example least-
squares minimisation or a Galerkin formulation). The method has been compared
with finite element results in Pluymers et al. (2003) and with experimental results in
Pluymers et al. (2003), with satisfactory agreements. It has been also used in vibroa-
coustic problems with infinite domains and coupled with finite elements in Pluymers
et al. (2004), and for the study of shell vibrations in Desmet et al. (2002) and Vanmaele
et al. (2003).
2.2.1.4 Spectral methods
The use of finite elements with enriched shape functions has often been considered
an alternative in order to improve the performance. In this kind of problems having
oscillatory solutions, the inclusion of high-order polynomials or even trigonometric
functions in the interpolation basis can reduce the numerical errors. We can see the
influence of the degree of the polynomials in the interpolation space in Eq. (2.30).
The expected FEM error for elements with interpolations based on higher order poly-
nomials is smaller than for linear elements.
A general approach to the spectral concept can be found in Boyd (1999). In
Babuska et al. (1981) the mathematical basis of the p-version of the FEM is discussed.
Several options exists in order to create element families of arbitrary degree of
the polynomials used for interpolation. A review of the most frequently used as
well as a comparison of the convergence depending on the polynomial family can be
found in Petersen et al. (2006). Besides convergence, other important aspects must
be considered. Among them, the condition number of the mass and stiffness matrices
obtained.

2.2 Numerical methods for the mid-frequency range 45
The most classical options are to use Lagrange or hierarchic polynomials. The
use of triangular and quadrilateral Lagrangian elements can be found in Warburton
et al. (1999). How to make an efficient implementation is shown in Hesthaven and
Warburton (2002), where tetrahedra are also used in three-dimensional problems. The
main advantage of using Lagrangian polynomials is that the unknown variables keep
a physical meaning. The correct location of the nodes inside the element in order to
avoid ill-conditioned matrices is a very important aspect in their use.
In the hierarchic elements, the shape functions of degree p can be obtained by
adding a new function to the p− 1 family. Moreover the matrices of order p− 1 are
included in the larger matrices of order p. This allows a reduction in the number of
operations to be done during the p refinement if the code is correctly optimised. How-
ever, to perform a correct implementation and guarantee continuity between elements
is not simple and requires additional topological information. Details on the correct
use of hierarchic elements are shown in Ainsworth and Coyle (2001) for problems us-
ing quadrilateral and triangular elements, and in Ainsworth and Coyle (2003) for the
more difficult case of tetrahedra in three-dimensional problems.
2.2.2 Structural dynamics
The computational cost of the structural part of the vibroacoustic problem is often
smaller than the cost of the acoustic part. Shells or plates (two-dimensional elements)
are often used in three-dimensional situations and beams (one-dimensional elements)
for two-dimensional vibroacoustic problems. Finally, while the acoustic waves are
nondispersive, the bending waves in plates are dispersive. Nondispersive waves have
the same wave velocity for every frequency and the relationship between the wave
number and the frequency is linear. On the contrary, dispersive waves have a different
wave velocity for every frequency and the relationship between the wave number and
the frequency is nonlinear. For low frequencies structural waves are shorter than
acoustic waves. The element size in the structure is smaller than in the acoustic
domain. However, after the critical frequency the acoustic wave length become smaller
while the bending wave length is almost constant. The size of finite elements in the

46 Review of numerical methods for vibroacoustics
acoustic part is then smaller than in the structure. In any case, some techniques
have also been used in order to improve the efficiency of numerical methods in the
structural part of the vibroacoustic problem.
The same idea of the partition of unity method (generalised FEM) that is used
for Helmholtz equation (see Section 2.2.1.1), has been applied to structural problems,
by Bouillard et al. (2002) and Bouillard et al. (2004) for beam elements, and De Bel
et al. (2004) for plates.
High-order polynomial shape functions, have also been used for solid mechanic
problems. In Duster (2001) p-FEM is used for modelling structures with anisotropy.
Implementation details can be found in Campion and Jarvis (1996). However, for
structural finite elements the interpolation space has more frequently been enriched
by using trigonometric shape functions than with high order polynomials. Both Euler-
Bernoulli beam elements and plate elements use cubic polynomials as shape functions
and it is not easy to generate shape functions of arbitrary order due to the continu-
ity requirements between elements (C1). The p-FEM has also been used in Bardell
(1996) for static problems and for composite panels in Bardell et al. (1997) where
the interpolation basis has been enriched with trigonometric functions. In Beselin
and Nicolas (1997) the bending eigenfrequencies of a rectangular plate with arbitrary
boundary conditions have been calculated. A trigonometric functional basis is used
instead of a polynomial basis. Due to the simple geometry of the problem, a pure
spectral approach is considered (it is not an element formulation). However, it is
valid in order to see the efficiency of spectral methods for dynamic problems and to
compare the performance of polynomial-based versus trigonometric-based functional
spaces. It has been shown that the polynomial basis leads to large numerical er-
rors and ill-conditioned matrices for very high interpolation orders. On the contrary,
trigonometric basis have a better numerical performance and can deal correctly with
the eigenfrequencies of the plate in a higher frequency range. This idea of generating
functional basis by means of trigonometric functions is generalised by Houmat (2005)
in order to obtain an element-based formulation that is useful for more complicated
geometries. A very versatile triangular element of arbitrary degree is formulated by

2.2 Numerical methods for the mid-frequency range 47
combining polynomial and trigonometric functions using the area coordinates. The
resulting element inherits properties from the Lagrangian elements and also from the
hierarchic elements. On the one hand shape functions can easily be associated with
a node of the element and vanish on the other nodes. On the other hand, the new
shape functions of higher degree can be obtained without modifying the previous ones.
The examples shown in Houmat (2005) deal with membranes also governed by the
Helmholtz equation (these elements could be used for acoustics). The same author
has extended the idea to quadrilateral elements in Houmat (2006). Again an eigen-
value analysis is used in order to compare the efficiency of the new elements against
standard Lagrangian elements of low order. Leung et al. (2004) propose a similar
formulation for trapezoidal elements in plane dynamic problems. Continuity is not
achieved automatically and additional topological information is required. Due to
the small number of elements that can be used (increasing the interpolation degree),
the geometry is often not properly described. In that situations some technique like
blending functions is necessary (Duster (2001)).
The family of spectral elements described in Doyle (1997) is also a powerful tool
in order to deal with high-frequency structural vibration problems. They were firstly
formulated in order to solve time-domain problems in the frequency domain by using
fast Fourier transforms. They differ from the p-element formulations mentioned be-
fore because now the weak formulation of the problem is not necessary. The chosen
interpolation field must exactly satisfy the differential equation inside the element
and the interpolation constants are obtained by dynamic equilibrium. In previous
spectral elements the exact solution inside the elements cannot be satisfied by the
interpolation field and minimisation of errors is afterwards imposed by means of the
weak formulation.
The exact solution is obtained in one-dimensional structural elements (beams) by
using the following interpolation of the displacement field:
u(x) = C1ek1x + C2e
k2x + C3e−k1x + C4e
−k2x + up(x) (2.39)
where Ci i = 1, 2, 3, 4 are constants, up(x) is a function taking into account the

48 Review of numerical methods for vibroacoustics
distributed loads and
k1 =
√√ω2ρsolidA
EIk2 =
√
−√ω2ρsolidA
EI(2.40)
ρsolid, A, E and I are the density, the cross section area, the Young modulus and the
inertia of the beam. The general procedure to derive dynamic stiffness matrices of
structural elements is detailed in Banerjee (1997).
These elements have been used for framed structures in Igawa et al. (2004) and
Lee (2000), for the case of Timoshenko beams in Ahmida and Arruda (2001), Rayleigh
beams (taking into account dynamic influence of rotational inertia), rods and beams
with elastic support in Yu and Roesset (2001). Very small changes (with respect to a
standard finite element formulation) are needed in the equations and implementation
in order to take into account all these beam theories in the same finite element code.
Moreover modifications of the method which take into account contraction of cross
section in beams can be found in Yu and Roesset (2001) and in Gopalakrishnan (2000).
The generalisation for multi-dimension structural elements is not trivial. Since the
analytical solution of the problem is required, the two-dimensional problems analysed
are often infinite or semi-infinite. A spectral plate formulation can be found in Lee and
Lee (1999), Danial et al. (1996), Danial and Doyle (1992), Danial and Doyle (1995)
and Rizzi and Doyle (1992). More complex geometries discretised by means of shell
spectral elements have been solved in Solaroli et al. (2003). In Gopalakrishnan and
Doyle (1995) the spectral solution has been combined with two-dimensional structural
elements. In Doyle (2000), the application of these spectral elements to a vibroacoustic
problem with curved beam and shell elements can be found. An interesting property
is that the solution inside the element is not interpolated and can be exactly known
by evaluation of exponential or trigonometric shape functions. It is an interesting
property in order to calculate the coupling terms. The spectral element methods
lead to dynamic stiffness matrices where the mass and stiffness matrices cannot be
separated and the pulsation of the problem is implicitly included. A linear eigenvalue
problem cannot be obtained and especial techniques must be used Zhaohui et al.

2.3 Concluding remarks 49
(2004).
Finally, the hybrid approach for structures at high frequencies presented in Ohayon
and Soize (1998) must be mentioned. It is more than a finite element formulation or
an efficient numerical method. The theory exposed there is based in the viewpoint
that an statistical understanding of the problem is required in the high-frequency
range. The concept of fuzzy structure is introduced. In general, the variables are
described by a mean value and an uncertain variation of it.
2.3 Concluding remarks
This review has been focused only on numerical-based techniques. In the examples
shown in the following chapters, finite elements (Chapters 4 to 9) and boundary
elements (Chapter 9) have been used for the low-frequency range. For the two-
dimensional vibrational problems of Chapter 7, the structural spectral method pro-
posed in Doyle (1997) has been used in order to avoid discretisation errors and extend
the analysis to higher frequencies. For vibroacoustic problems in the mid-frequency
range, a model combining finite elements and the analytical solution of some of the
acoustic domains has been used in order to reduce the numerical cost (the detailed
description is done in Chapter 5).
FEM and BEM (Section 2.1) are consolidated techniques that have been used
and tested for vibroacoustic problems. Moreover, even some open and commercial
codes (EDF (2007), Free-Field-Technologies (2007)) and libraries (INRIA and SD-
Tools (2007)) exists which is a proof of maturity and a guarantee that engineering
results can be obtained (at least for low frequencies). Most of the main problems that
can be found (numerical errors, meshing criteria, implementation tricks) have already
been documented. On the contrary, most of the techniques presented in Section 2.2
are very recent. Their use is not generalised beyond the research groups that have
developed them. All of them have better performance than FEM when analysed in
terms of meshing requirements or degrees of freedom per frequency. However, most
of them also require non-standard tools or numerical techniques: specific integration

50 Review of numerical methods for vibroacoustics
rules, additional geometrical data (connectivities), to perform interpolations of pres-
sure fields... i.e. it is well known that an efficient implementation of a mesh-free
software is more difficult that and efficient implementation of FEM. The possible
advantages of mesh-free methods can then be hidden if a non-efficient implementa-
tion is used. The same conclusion is also valid for some of the other new numerical
techniques.

Chapter 3
One-dimensional model for
vibroacoustics
3.1 Introduction
An usual simplification in sound transmission models is to deal with unbounded acous-
tic domains and structures. This hypothesis, where the modal behaviour is completely
neglected, is more adequate for high frequencies and makes it less difficult to obtain
analytical solutions. On the contrary, numerical methods and deterministic models
based on the vibroacoustic equations deal with acoustic domains and structures of
finite size and have been mainly applied in the low frequency range.
In this chapter, a one-dimensional model where the vibroacoustic equations are
solved analytically will be presented. Solutions can be obtained by solving only a
linear system of equations and the model can deal with sound transmission through
layered partitions. The model also considers the various relevant sources of damping.
Two main applications are envisaged. On the one hand, to have an analytical
solution is an important tool to test elaborate numerical models (two and three-
dimensional models must be able to solve one-dimensional situations too). On the
other hand, the most important properties of deterministic solutions can be under-
stood through the one-dimensional model. How to obtain classical acoustic outputs
51

52 One-dimensional model for vibroacoustics
(sound reduction index or sound intensity) with a model that determines the total
pressure (instead of a wave splitting of the pressure field) will be shown. The model
can also be used to perform simple parametric analyses.
The chapter is structured as follows. In Section 3.2 the main features of a simple
version (undamped) of the model are presented. A first example where the modal
behaviour of a vibroacoustic response is shown will be presented and the most impor-
tant parameters will be defined. In Section 3.3 the model is enriched with acoustic
absorption and structural damping effects. Modifications in the model caused by
the consideration of “double walls” and acoustically absorbing materials are done in
Section 3.4. The ability of the modified model to describe the influence of the air
gap between double walls and the improvement of the vibroacoustic response due to
absorbing materials is shown in two new examples. In Section 3.5 a comparison of
the analytical model with some numerical solutions with one-dimensional behaviour
is carried out. Some two-dimensional vibroacoustic examples solved by means of nu-
merical models that have been tested with the one-dimensional solution proposed here
are presented. Finally, the conclusions of the work are summarised in Section 3.6.
3.2 One-dimensional model for undamped vibroa-
coustics
3.2.1 Problem statement
In its simpler version, the model for vibroacoustics is based on the conceptual device
of Fig. 3.1. The structure (e.g. partition wall) is represented by a particle of mass M
connected to a spring of stiffness K. It separates two acoustic domains (e.g. rooms) Ω1
and Ω2 of lengths `1 and `2. The sound source is the vibrating panel in the left edge,
while the right edge represents a pure reflecting contour. Note that, for convenience,
a different coordinate is used in each acoustic domain (i.e. x1 ∈ (0, `1) for Ω1 and
x2 ∈ (0, `2) for Ω2).
The unknowns are the acoustic pressure P (x, t) in domains Ω1 and Ω2 and the par-

3.2 One-dimensional model for undamped vibroacoustics 53
x x
K
MΩ1
Ω2
l 1 l 2
1 2
Figure 3.1: Conceptual model of undamped vibroacoustics
ticle displacement U(t). Assuming steady-harmonic solutions, they can be expressed
as
P (x, t) = Rep(x)eiωt
(3.1)
U(t) = Reueiωt
(3.2)
where p(x) ∈ C is the spatial variation of pressure, u ∈ C is the phasor of the
displacement of the mass particle and ω = 2πf is the angular frequency (f frequency).
For simplicity, the case of real frequencies ω (steady-harmonic excitation with no
attenuation) is considered here.
3.2.1.1 Dimensional equations
The one-dimensional differential model for undamped vibroacoustics is summarised in
Table 3.1. In each acoustic domain, a Helmholtz equation governs the spatial variation
of pressure, Eqs. (3.3) and (3.4), with k = ω/c (k: wave number; c: speed of sound
in air). The particle moves according to the undamped equation of dynamics (3.5),
with the external force given by the pressure difference in its two interfaces (times a
surface S required for dimensionality).
By replacing expressions (3.1) and (3.2) into Eq. (3.5), the particle displacement
can be solved in closed form as
u =S
K − ω2M[p1(`1) − p2(0)] . (3.10)

54 One-dimensional model for vibroacoustics
Differential equations
Acoustic domain Ω1:d2p1
dx2+ k2p1 = 0 in 0 < x < `1
(3.3)
Acoustic domain Ω2:d2p2
dx2+ k2p2 = 0 in 0 < x < `2
(3.4)
Particle: MU +KU = S [P1(`1) − P2(0)] (3.5)
Boundary conditions
Vibrating panel:dp1
dn≡ −dp1
dx= −iρ0ωvn at x = 0 (3.6)
Interface Ω1–particle:dp1
dn≡ dp1
dx= ρ0ω
2u at x = `1 (3.7)
Interface Ω2–particle:dp2
dn≡ −dp2
dx= −ρ0ω
2u at x = 0 (3.8)
Reflecting contour:dp2
dn≡ dp2
dx= 0 at x = `2 (3.9)
Table 3.1: One-dimensional differential model for undamped vibroacoustics
The boundary conditions (BC) for the Helmholtz equations are also shown in Ta-
ble 3.1. The vibrating panel is represented by a non-homogeneous Neumann BC,
Eq. (3.6), where vn is the prescribed normal velocity of the panel. An homogeneous
Neumann BC, Eq. (3.9), models the reflecting contour. The interfaces between the
acoustic domains and the particle are coupling BC, Eqs. (3.7) and (3.8), that couple
the two acoustic domains. In these BC, ρ0 is the density of air and n denotes the
outer unit normal.

3.2 One-dimensional model for undamped vibroacoustics 55
3.2.1.2 Dimensionless equations
The dimensionless version of the differential model will give insight into the relevant
factors that control the vibroacoustic response. The characteristic values of length,
frequency (i.e. time) and pressure (i.e. force) and the corresponding dimensionless
variables, denoted by a , are shown in Table 3.2.
Magnitude Characteristic value Ddimensionless variableLength `char := `1 x := x/`char
Frequency ωchar := ω ω := ω/ωchar = 1Pressure pchar := ωMc/S p = p/pchar
Table 3.2: Characteristic values for adimensionalisation
With these new variables, the dimensionless version of the model shown in Ta-
ble 3.3 is obtained. Note that the equation of dynamics does not longer appear
explicitly in the model. Instead, its closed-form solution, Eq. (3.10), has been used in
the dimensionless Robin BC, Eqs. (3.14) and (3.15).
Five dimensionless numbers appear naturally during the adimensionalisation pro-
cess. All these numbers, see Table 3.4, have a clear physical interpretation. N/2π is
the number of waves that fit into acoustic domain Ω1. λ is the ratio of lengths of the
two acoustic domains. µ is the ratio of masses between the acoustic domain Ω1 (mass
of air: density times length times surface) and the particle. ϑ is a ratio of speeds
(speed of vibrating panel and speed of sound). Finally, G is a factor that depends on
the ratio of frequencies (frequency of acoustic wave and natural frequency of particle).
3.2.2 Analytical solution
Due to its one-dimensional nature, the model of Table 3.3 is a very simple system of
ordinary differential equations (ODE), with analytical solution
p1(x) = C1 cos(Nx) + C2 sin(Nx) ; p2(x) = C3 cos(Nx) + C4 sin(Nx) (3.17)

56 One-dimensional model for vibroacoustics
Differential equations
Acoustic domain Ω1:d2p1
dx2+N2p1 = 0 in 0 < x < 1 (3.11)
Acoustic domain Ω2:d2p2
dx2+N2p2 = 0 in 0 < x < λ (3.12)
Boundary conditions
Vibrating panel:dp1
dx= iµϑ at x = 0 (3.13)
Interface Ω1–particle:dp1
dx= µG [−p1(1) + p2(0)] at x = 1 (3.14)
Interface Ω2–particle:dp2
dx= µG [−p1(1) + p2(0)] at x = 0 (3.15)
Reflecting contour:dp2
dx= 0 at x = λ (3.16)
Table 3.3: Differential model for undamped vibroacoustics, dimensionless version
Definition MeaningN := k`1 Waves in acoustic domain Ω1
λ := `2/`1 Ratio of lengthsµ := ρ0`1S/M Ratio of massesϑ := vn/c Ratio of speeds
G := 1/ (1 − ω2nat/ω
2) with ωnat :=√K/M Frequency factor
Table 3.4: Dimensionless numbers for undamped vibroacoustics
where the integration constants Ci (i = 1 . . . 4) are determined with the boundary
conditions. Eqs. (3.13) and (3.16) yield
C2 =iµϑ
N; C4 cos(Nλ) = C3 sin(Nλ) (3.18)

3.2 One-dimensional model for undamped vibroacoustics 57
whereas Eqs. (3.14) and (3.15) lead to the linear system of equations
(−µG cosN +N sinN µG
−µG cosN µG−N tan(Nλ)
)C1
C3
=
C2(µG sinN +N cosN)
C2µG sinN
(3.19)
The eigenfrequencies of the coupled vibroacoustic problem are the zeros of the deter-
minant of system (3.19) regarded as a function of G (i.e. for fixed values of N , λ and
µ):
∆(G;N, λ, µ) = N[−N sinN tan(Nλ) + µG
(sinN + cosN tan(Nλ)
)](3.20)
For frequencies other than eigenfrequencies, the unique solution is given by
p1(x) =−iµϑ
∆[N tan(Nλ) cosN + µG (tan(Nλ) sinN − cosN)] cos(Nx)+
+iµϑ
Nsin(Nx) (3.21)
p2(x) =−iµ2ϑG
∆[cos(Nx) + tan(Nλ) sin(Nx)] (3.22)
3.2.3 Application example
In this section, the model will be applied to a particular situation. The data of Ta-
ble 3.5 have been used. Note that a single mass without stiffness has been considered.
Thereby it is like a wall that can freely vibrate. The total mass of the wall is 750 kg
(M = S · ρwall · t). Some basic acoustic parameters will be introduced here.
The analytical solution for the proposed data is plotted in Fig. 3.2. There is a
large difference between the values of acoustic pressure in the first and second acoustic
domains (orders of magnitude).
Acoustic magnitudes (logarithmic scale) will be used. The sound pressure level L
is obtained from a steady-harmonic pressure as
L = 10 log10
(p2rms
p20
)where p2
rms =1
t2 − t1
∫ t2
t1
p2(t)dt (3.23)

58 One-dimensional model for vibroacoustics
Meaning Symbol ValueDensity of the wall ρwall 2500 kg/m3
Thickness of the wall twall 0.1 mLength of domain 1 l1 3 mLength of domain 2 l2 4 mSurface of the wall S 3 m2
Stiffness of the single mass K 0 N/mNormal velocity of the vibrating panel vnnn 7.5 · 10−3 − 2.5 · 10−3i m/s
Table 3.5: Geometric and material data for the examples with a single mass
-4
-2
0
2
4
0 1 2 3 4 5 6 7
φ (P
a)
x (m)
φ1im
φ2im
φ1re
φ2re
(a)
-0.004
-0.002
0
0.002
0.004
3 3.5 4 4.5 5 5.5 6 6.5 7
φ (P
a)
x (m)
φ2im
φ2re
(b)
Figure 3.2: Dimensional solution for the undamped one-dimensional model: (a) do-mains 1 and 2; (b) Zoom for domain 2. Frequency = 270 Hz
Taking into account that the root mean square pressure can be obtained as prms =
|p|/√
2, the sound pressure level can be rewritten as
L = 10 log10
( |p|22p2
0
)(3.24)
where p0 is a reference value of pressure (it typically is the lowest limit of audible
pressure p0 = 2·10−5 Pa) and prms is the root mean square pressure. The time interval
t2 − t1 must be large enough in order to include several cycles in the integration. The
isolation capacity of a mass is estimated by means of the sound level difference D

3.2 One-dimensional model for undamped vibroacoustics 59
between acoustic domains
D =
∫Ω1
L1(x)dx
`1−∫Ω2
L2(x)dx
`2(3.25)
D can be obtained by averaging 1 the total pressure in the sending and receiving
domains. In other deterministic acoustic models it is very common to split the pressure
field between incident, reflected and transmitted waves. The isolation capacity is then
measured by means of the sound reduction index R, defined as
R = 10 log10
(IincItr
)(3.26)
Iinc is the incident acoustic intensity and Itr the transmitted acoustic intensity.
These duality of outputs is a drawback for the models considering finite acoustic
domains (instead of unbounded) and dealing with the total value of pressure like the
one-dimensional model and almost all the numerical models. R is a natural output
for the wave-based models because incident and transmitted waves can be naturally
distinguished. However, D cannot be obtained. On the contrary, D is a natural
output of numerical models butR has to be obtained by making additional hypotheses,
since it is not possible to distinguish (in two or three-dimensional situations) between
incident, reflected and transmitted waves 2. There is a relationship between the sound
level difference and the sound reduction index for the case of reverberant pressure
fields. It will be discussed in Chapters 5 and 6.
An analysis of the eigenfrequencies of the problem is carried out. The eigenfre-
quencies of the coupled model are the roots of Eq. (3.20). With the numerical values
employed in the current example, µ = 0.014 and G = 1.0, µG << N and we can
consider that
∆(G;N, λ, µ) ' −1
cos(Nλ)
(N sin(Nλ) sin(N)
)(3.27)
1Since the analytical solution is available, the spatial average is done here by means of an analyticalintegration. However, it is in practise estimated by averaging the pressure in some points of theacoustic domain.
2The one-dimensional situation is the only one, among the models considering bounded domains,where the incident and reflected waves can be directly obtained from the analytical solution of p.

60 One-dimensional model for vibroacoustics
The physical meaning of this simplification is the interpretation of vibroacoustic eigen-
frequencies as the pure acoustic eigenfrequencies of the acoustic domains with pure
reflecting contours (eigenfrequencies of a linear ODE of second order, fn = nc/2`,
with c the velocity of sound in air and l the length of the acoustic domain). The
vibroacoustic eigenfrequencies and the pure acoustic eigenfrequencies of each acoustic
domain are compared in Table 3.6. This approximation can be done for light fluids
(small µ) like air. Although the eigenfrequencies can be accurately approximated con-
sidering uncoupled acoustic problems, the modes (eigenfunctions) are not uncoupled.
While the eigenfrequencies of the receiving domain only cause a relevant increase
of sound level in the receiving domain, the eigenfrequencies of the sending acoustic
domain cause an increase of sound in both domains. This is illustrated in Fig. 3.3,
where the sound levels for problems with equal rooms and different rooms are plotted.
The dips in the sound level difference occur for the eigenfrequencies of the receiving
acoustic domain, see Fig. 3.3(b).
The influence of the stiffness in the vibroacoustic eigenfrequencies can be studied
by means of the dimensionless parameter G. It only has a localised (in the frequency
range) effect closer to the natural frequency of vibration (ωnat) of the single mass. Its
effect is completely negligible away from that frequency where G ≈ 0 (for ω ≈ 0) or
G ≈ 1 (for ω ωnat). In both situations G N . Around the eigenfrequency of the
single mass the sound level in both acoustic domains is very similar and consequently
the isolation capacity is poor.
The main advantage of the one-dimensional model presented here with respect to
other analytical formulations as the mass law (Fahy (1989), Beranek and Ver (1992)),
is the ability to predict the modal response of the sound reduction index. The sim-
plified formulations which only deal with unbounded acoustic domains and structures
cannot predict the influence of the modal behaviour of finite acoustic domains. In
Maluski and Gibbs (2000) and Maluski and Gibbs (2004), it has been shown by
means of numerical (Finite Element Method) and laboratory experiments that the
sound reduction index of a given wall not only depends on its physical properties
(mass, stiffness, damping...) but also on the geometrical characteristics of the rooms

3.2 One-dimensional model for undamped vibroacoustics 61
separated by the isolation element. The response is very modal at low frequencies.
coupled Room 1 Room 2 coupled Room 1 Room 22.824 0.000 0.000 283.350 283.33342.581 42.500 297.512 297.50056.748 56.667 340.024 340.000 340.00085.041 85.000 382.509 382.500113.374 113.333 396.679 396.667127.527 127.000 425.008 425.000170.047 170.000 170.000 455.344 453.333212.516 212.500 467.508 467.500226.687 226.667 510.016 510.000 510.000255.014 255.000
Table 3.6: Coupled vibroacoustic eigenfrequencies (in Hz) compared with pure acous-tic eigenfrequencies of each room.
20
40
60
80
100
120
0 50 100 150 200 250 300
(dB
)
f (Hz)
L1 L2 D
(a)
20
40
60
80
100
120
0 50 100 150 200 250 300
(dB
)
f (Hz)
L1 L2 D
(b)
Figure 3.3: Influence of room modes in the sound level difference (D) and the soundpressure levels for every room (L1, source room and L2, receiving room). (a) Equalrooms (λ = 3/3). (b) Different rooms (λ = 4/3).

62 One-dimensional model for vibroacoustics
3.3 One-dimensional model for damped vibroacous-
tics
3.3.1 Problem statement
To enrich the model of Section 3.2, attenuation effects are added here. The two
relevant sources of damping are considered, see the conceptual device of Fig. 3.4:
structural damping and acoustic absorption.
x x
l 1 l 2
K
MΩ1
Ω2
1 2
C
A
Figure 3.4: Conceptual model of damped vibroacoustics
Structural damping is modelled by the usual velocity-proportional damping term.
Acoustic absorption in the receiving room is taken into account by means of a Robin
boundary condition. An attenuated excitation is represented by a complex frequency
ω = ωR + ωIi.
3.3.1.1 Dimensional equations
Only two modifications to the undamped model of Table 3.1 are needed to incorporate
damping:
• Adding the damping force Cu (C: damping coefficient; u: particle velocity) to
the equation of dynamics (3.5), which can be solved in closed form into
u =S
K + iωC − ω2M
[p1(`1) − p2(0)
](3.28)

3.3 One-dimensional model for damped vibroacoustics 63
• Replacing the homogeneous Neumann boundary condition (3.9) by the Robin
BC
Absorbing contour:dp2
dn≡ dp2
dx= −iρ0ωAp2 at x = `2 (3.29)
where A is the admittance of the absorbing material.
3.3.1.2 Dimensionless equations
The dimensionless version of Eq. (3.29) is
Absorbing contour:dp2
dx= −iNAp2 at x = λ (3.30)
where a new dimensionless number appears, see Table 3.7: the ratio of admittances
A. It is the ratio between the physical admittance A and the admittance of a plane
acoustic wave (Kinsler et al. (1990)). In an anechoic situation (see for example Kang
and Bolton (1996)), the value of A is 1. Note also that the frequency factor G has
been enriched with the structural damping term. Cc is the critical damping of a
single-degree-of-freedom system (Clough and Penzien (1993)).
Definition Meaning
G := 1/
(1 − ω2
nat
ω2− 2
C
Cci
)Frequency factor
with ωnat :=√K/M and Cc := 2Mω
A := A/ (1/ρ0c) Ratio of admittances
Table 3.7: Additional dimensionless numbers for damped vibroacoustics
3.3.2 Analytical solution
The analytical solution of the dimensionless model of damped vibroacoustics is
p1(x) =C1eiNbx + C2e
−iNbx
p2(x) =C3eiNbx + C4e
−iNbx(3.31)

64 One-dimensional model for vibroacoustics
where complex arithmetics are needed because N ∈ C. The integration constants Ci
(i = 1 . . . 4) are determined with the boundary conditions. Eqs. (3.13), (3.14) , (3.15)
and (3.30) lead to the linear system of equations
a −a 0 0(b + a
)ea
(b− a
)e−a −b −b
bea be−a a− b −a− b
0 0(A+ 1
)eaλ
(A− 1
)e−aλ
C1
C2
C3
C4
=
iµϑ
0
0
0
(3.32)
with a = iN and b = µG. Note that, due to damping effects, the four constants are
coupled. System (3.32) can be solved symbolically with a good algebraic manipulator,
but the resulting analytical expressions are rather cumbersome and provide little
insight. It is more convenient to solve the system of equations numerically for a given
set of parameters. Eigenfrequencies can be determined as the (complex) zeros of the
determinant of the matrix in Eq. (3.32).
3.3.3 Application examples
3.3.3.1 Influence of damping on the sound level difference
The effect of the introduction of damping in the model will be studied in the example
presented in Section 3.2.3. Several values of the admittance (Robin boundary condi-
tion of Eq. (3.30)) will be considered. Each of them corresponds to a percentage of
acoustic absorption (ratio between incident and reflected intensities). The values are
presented in Table 3.8.
In Fig. 3.5 we can see that the variation of sound level difference due to the at-
tenuation effects is significant. On the one hand the pattern in the modal behaviour
of the sound reduction index remains unaltered (the reduction in the isolation capac-
ities decreases around more or less the same frequencies). But on the other hand,
in the detail of Fig. 3.5(b) we can see a progressive attenuation of the influence of
vibroacoustic modes when the absorption increases. The attenuation affects both the
dips around eigenfrequencies and the intervals of maximum sound level difference be-

3.3 One-dimensional model for damped vibroacoustics 65
Admittance A (m3/Ns) Absorption αn (%) Ratio of admittances A0 0 0
6.57 · 10−5 − 4.15 · 10−7i 10 2.64 · 10−2 − 1.66 · 10−4i2.22 · 10−4 − 4.14 · 10−6i 30 8.91 · 10−2 − 1.66 · 10−3i4.28 · 10−4 − 1.84 · 10−5i 50 1.72 · 10−1 − 7.38 · 10−3i7.29 · 10−4 − 3.53 · 10−5i 70 2.92 · 10−1 − 1.41 · 10−2i
2.492 · 10−3 100 1
Table 3.8: Admittance values
tween eigenfrequencies. In the limit, for the anechoic case the receiving domain is
unbounded. This is the situation assumed in order to deduce mass-law type expres-
sions. In that case, the value of D should be similar to the value of R predicted by
this expressions because it is not affected by reflections in the receiving domain. Two
different situations have been analysed for the anechoic case. While in the first one
(α = 100 %) the sound pressure level in the sending domain is obtained by averaging
the total pressure, in the second one (α = 100 % inc.) L has been obtained consider-
ing only the part of the solution that corresponds to the incident pressure wave. In
both cases the dips caused by the eigenfrequencies of the problem disappear (like in
the mass-law). However, the second case has a better agreement with the mass law.
If the averaged pressure level in the sending room is obtained considering the total
pressure, the obtained values are slightly over the mass-law predicted results.
3.3.3.2 Influence of damping on the eigenfrequencies
Previously, the effect of acoustic absorption in the sound level difference for the case
of pure harmonic acoustic force has been studied. In general terms, the response is
attenuated. Here, the modification caused by acoustic absorption on the eigenfre-
quencies of the problem will be shown. The sound level difference has been plotted
in the two-dimensional space (f ;ωI, ω = 2πf + ωIi). Fig. 3.6 is an iso-value map of
sound level difference, we can see drastic reductions of the isolation capacity around
some singular points. They are some of the complex vibroacoustic eigenfrequencies
of the damped model. In Fig. 3.7 two detailed iso-value maps are compared. On the

66 One-dimensional model for vibroacoustics
-20
-10
0
10
20
30
40
50
60
70
0 100 200 300 400 500
D (
dB)
f (Hz)
mass law α = 0 %
α = 100 % α = 100 %, only incident
(a)
0
10
20
30
40
50
70 75 80 85 90 95 100 105
D (
dB)
f (Hz)
mass law α = 0 % α = 10 % α = 30 % α = 50 % α = 70 % α = 100 % α = 100 %, inc.
(b)
Figure 3.5: Influence of the acoustic absorption in the sound level difference (D)
left (a) an undamped situation (example of Section 3.2.3) where the eigenfrequencies
are located on the pure harmonic axis (ωI = 0). On the right (b) the damped exam-
ple studied in this section, where the eigenfrequencies have attenuation component
(ωI > 0).
It can be concluded that the acoustic absorption also attenuates the eigenfrequen-
cies of the problem. They are shifted into the complex plane (f ;ωI). There is no
pure harmonic vibroacoustic eigenfrequency. This has two important physical con-
sequences. On the one hand, when studying a damped vibroacoustic system that is
excited with pure harmonic forces, a pure resonance is never found. In other words,
the systems to be solved numerically will never be singular. On the other hand, if the
system is studied in the time domain its response will also be attenuated after the
action of forces. In these situations the behaviour of the system is described by the
eigenfrequencies and all of them have attenuation component.

3.4 One-dimensional model of layered partitions 67
−75
−100
−50
−25
0
25
50
75
100
0 50 100 150 200 250 300f (Hz)
I (Hz)ω
Figure 3.6: Iso-values of sound level difference. General view for the damped situation.
10 20 30 40 500
f (Hz)
ω (Hz) I
(a) (b)
10 20 30 40 500
7
−7
Figure 3.7: Effect of the damping in the eigenfrequencies. Iso-values of sound reduc-tion index. (a) Undamped. (b) Acoustic absorption (10 %) The eigenfrequencies haveattenuation component.
3.4 One-dimensional model of layered partitions
3.4.1 Problem statement
Single massive walls have limited acoustic isolation capabilities. In order to improve
the performance, layered partitions are typically used. Sandwich panels consist of two
layers with an acoustically absorbent material (glass fiber, cotton, mineral wools, etc.)

68 One-dimensional model for vibroacoustics
in between. In some cases, the space between the two layers is simply an air cavity. To
account for layered partitions in the model, a second mass and an absorbent domain
between the two masses have been added, see Fig. 3.8. The pressure field in the
absorbent cavity can be correctly modelled using equivalent fluid models. In Delany
and Bazley (1970), frequency-dependent empirical laws for the propagation velocity
of sound and the density of the medium are proposed. They are obtained by means
of laboratory measurements. The pressure field inside the cavity can the be expressed
as
p(x, t) = Repmaxe
−ikmediumxeiωt
(3.33)
x x
2
Ω2
Ω3k = (ω /c) k = (ω /c)
Ω1
1
l 1
M
C
K
M
2
C
A
l
1
1
1
1K
l3
2
2
2
k or Γ
Figure 3.8: Conceptual model of sound insulation in a layered partition
3.4.1.1 Dimensional equations
The new governing equations for the model with two masses are summarised in Ta-
ble 3.4.1.1. The main difference can be found in Eq. (3.34). When the intermediate
acoustic domain has no absorbent material, the wave number is k = ω/c. When an
absorbent material is modelled, the wave number k has to be replaced by the material
propagation constant (kmedium) that is also a frequency-dependent parameter.
3.4.1.2 Dimensionless equations
If absorbent material is considered, a dimensionless number with new physical mean-
ing has to be defined: γ. It is the ratio between the wave numbers of the medium
and the air (γ = kmedium/kair). Moreover, µ and G have to be particularised for each

3.4 One-dimensional model of layered partitions 69
Differential equations
Acoustic domain Ω1:d2p1
dx2+ k2p1 = 0 in 0 < x < `1
Acoustic domain Ω2:d2p2
dx2+ k2p2 = 0 in 0 < x < `2
Acoustic domain Ω3:d2p3
dx3+ k2
mediump3 = 0 in 0 < x < `3
(3.34)
Particle 1: M1u1 + C1u1 +K1u1
= S [p1(`1) − p3(0)]
Particle 2: M2u2 + C2u2 +K2u2
= S [p3(`3) − p2(0)]
Boundary conditions
Vibrating panel:dp1
dn≡ −dp1
dx= −ρ0iωvn at x = 0
Interface Ω1–particle 1:dp1
dn≡ dp1
dx= ρ0ω
2u1 at x = `1
Interface Ω3–particle 1:dp3
dn≡ −dp3
dx= −ρmediumω2u1 at x = 0
Interface Ω3–particle 2:dp3
dn≡ dp3
dx= ρmediumω
2u2 at x = `3
Interface Ω1–particle 2:dp2
dn≡ −dp2
dx= −ρ0ω
2u2 at x = 0
Absorbing contour:dp2
dn≡ dp2
dx= −ρ0iωAp2 at x = `2
Table 3.9: One-dimensional differential model for damped vibroacoustics with twomasses

70 One-dimensional model for vibroacoustics
single mass involved in the equation and depending on the density of the medium in
each side of the mass. The new definition for µ is
µij = (ρmedium)i `1
(S
M
)
j
(3.35)
where i indicates the medium and j the mass. The dimensionless equations can be
obtained in a similar way to Section 3.2.1.2. The only new dimensionless equation is
due to the absorbent material:
d2p3
dx2+ (γN)2p3 = 0 in 0 < x < λ2 (3.36)
3.4.2 Analytical solution
The same strategy of Section 3.3.2 can be used to obtain the analytical solution. The
following generic solution is proposed
p1(x) = C1eiNbx + C2e
−iNbx; p2(x) = C3eiNbx + C4e
−iNbx; p3(x) = C5eiγNbx + C6e
−iγNbx
(3.37)
The only additional consideration is for the intermediate domain, where the possibility
of the absorber propagation constant has to be taken into account. Now, six arbitrary
constants have to be determined. The particular value for the constants will be
determined numerically for every specific case solving the following linear systems of
equations
Ac = b c = (C1, C2, C5, C6, C3, C4)T (3.38)

3.4 One-dimensional model of layered partitions 71
a11 = iN a12 = −iN
a21 = µ11G1eiN + iNeiN a22 = µ11G1e
−iN − iNe−iN
a23 = −µ11G1 a24 = −µ11G1
a31 = µ31G1eiN a32 = µ31G1e
−iN
a33 = iγN − µ31G1 a34 = −iγN − µ31G1
a43 = µ32G2eiγNλ2 + iγNeiγNλ2 a44 = µ32G2e
−iγNλ2 − iγNe−iγNλ2
a45 = −µ32G2 a46 = −µ32G2
a53 = µ22G2eiγNλ2 a54 = µ22G2e
−iγNλ2
a55 = iN − µ22G2 a56 = −iN − µ22G2
a65 = iNAeiNλ1 + iNeiNλ1 a66 = iNAe−iNλ1 − iNe−iNλ1
b1 = iµ1ϑ
(3.39)
3.4.3 Application examples
3.4.3.1 Influence of the type of absorbent material on the sound level
difference
The effect of the resistivity of the absorbing material on the sound level difference
has been studied by means of the one-dimensional solution presented in Section 3.4.2.
The parameters used in the analysis can be found in Table 3.10. The length of the
intermediate cavity is constant (0.07 m) and the resistivity of the absorbing material
is modified. The obtained results have been plotted in Fig. 3.9(a). It can be seen that
the effect of the absorbent material is important for very low and for high frequencies.
3.4.3.2 Influence of the air gap thickness on the sound level difference
In the second example, the influence of the air gap thickness between wall has been
studied. Several examples with increasing air gap length have been computed, see
Fig. 3.9(b).
The difference between double walls with wide and with narrow air cavities is large
for low frequencies and becomes smaller with the increase of frequency.
The more efficient strategy in order to improve the isolation abilities seems to be

72 One-dimensional model for vibroacoustics
as follows (from less isolation capacity to more isolation capacity):
1. Use a single massive wall
2. Use a double wall. A small air gap (' 5 cm) full with an ordinary absorbing
material, (R1 ' 7 kN · s/m4) seems to be the most efficient option.
3. In order to improve the isolation, increasing the air gap will be slightly better
than increasing the quality of the absorbing material.
The most relevant improvement in the isolation capacity takes place between situa-
tions 1 and 2. These results provide a preliminary information on the basic parameters
for the problem of sound transmission. Similar tendencies have been found in the two
and three-dimensional analyses of Chapter 6. However, important effects like the
resonance cannot be considered by this simplified model.
0
10
20
30
40
50
60
70
80
90
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
D (
dB)
f (Hz)
air σ = 5 kN s/m4 σ = 10 kN s/m4 σ = 50 kN s/m4
(a)
-10
0
10
20
30
40
50
60
70
50
100
150
200
250
300
350
400
D (
dB)
f (Hz)
0.05 m 0.10 m 0.15 m 0.20 m
(b)
Figure 3.9: Parametric analysis of the two-masses model: (a) Influence of the ab-sorbent material (constant cavity thickness, 0.07 m). (b) Influence of the thickness ofthe air cavity.

3.5 Validation of finite element models 73
Meaning Symbol ValueDensity of leave 1 ρwall 913 kg/m3
Thickness of leave 1 twall 0.013 mDensity of leave 2 ρwall 809 kg/m3
Thickness of leave 2 twall 0.009 mLength of domain 1 `1 3 mLength of domain 2 `2 4 mAir gap length `3 0.07 mSurface of the wall S 3 m2
Stiffness of the single mass K 0 N/mStructural damping (C = 2 βωnat M) β 0 N s/m kgNormal velocity of the vibrating panel vnnn 7.5 − 2.5 · 10−3i m/sAdmittance A 0 m3/Ns
Table 3.10: Geometrical and material data for the example presented in Fig. 3.9
3.5 Validation of finite element models
Although some vibroacoustic phenomena can be correctly described by the one-
dimensional model, this is not its only use. In fact, it has been mainly conceived
as a bridge between numerical methods applied to vibroacoustic formulations and
the classical analytical approaches. Traditional analytical formulations typically deal
with unbounded domains. Infinite domains (Astley (2000)) are difficult to model nu-
merically and moreover they do not reproduce the typical situations where sound is
transmitted between rooms.
An analytical solution of reference for a vibroacoustic problem can be used in three
different ways for someone studying vibroacoustics from a numerical point of view.
Firstly, the numerical implementation can be tested. Solving correctly a one-
dimensional problem does not ensure that the numerical model is totally correct but
it is an important test. Secondly, the one-dimensional model can give additional
information. The expected behaviour of the numerical response (modal response) as
well as a coarse approximation of the obtained results is correctly predicted. And
finally, the analytical solution can be used in order to measure the numerical error
and adjust parameters like the mesh size.

74 One-dimensional model for vibroacoustics
The main drawback of the model is the inability to reproduce structural waves
(the wall is only modelled by means of a mass with a single degree of freedom).
The reference example of Sections 3.2.3 and 3.3.3 has been solved using a two-
dimensional finite element model. Two-dimensional domains (Fig. 3.10(a)) must be
correctly adapted to reproduce the one-dimensional situation. Uniform normal ve-
locity field has to be imposed on the left boundary. Horizontal contours have to
be considered to be pure reflecting boundaries (homogeneous Neumann boundary
condition) while the right contour can be a pure reflecting or a Robin (absorbent)
contour. The boundary conditions in the structure must allow translational displace-
ment. Moreover, flexural or axial waves have to be avoided.
Γn
Γny Γn
y
l2l1
Γny Γn
y
l3Ω1 Ω2Γn/r
(a)
-2.6
-2.4
-2.2
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-2.8 -2.6 -2.4 -2.2 -2 -1.8 -1.6 -1.4
log(
e)
log(h)
F.E.M. (f=270 Hz)
(b)
Figure 3.10: Comparison of a FE solution in a two-dimensional domain and thesolution obtained with the one-dimensional model. (a)Two-dimensional model withone-dimensional behaviour. (b) Global relative error e vs. dimensionless element size
h
The numerical solution converges to the analytical solution when the mesh is
refined. A global measure of the error (Eq. (3.40), where • denotes complex conjugate
of •) has been plotted in Fig. 3.10(b)
∣∣e∣∣2 =
∫Ω
(p− ph)(p− ph)dΩ∫ΩppdΩ
(3.40)

3.6 Concluding remarks 75
3.6 Concluding remarks
A one-dimensional model for vibroacoustics has been developed. Several versions
of the model have been presented: with one or two masses and with and without
attenuation effects. The analytical solution for the case of one mass without damping
effects has been obtained. It can also be done for more elaborate situations where
damping effects are considered or two masses included in the model.
The main advantage of the presented model with respect to other simplified for-
mulations available in the literature is the ability to deal with vibroacoustic modes
which highly influence the outputs of interest. The model is closer to the type of
vibroacoustic solutions obtained by means of numerical methods.
The presented model can be used to understand and describe sound transmission.
The influence of several physical parameters: density of the wall, acoustic absorption,
structural damping, influence of the air gap inside a double wall, increase of sound
reduction index due to isolating materials... can be studied. The analytical solution
of the model can be used in order to test numerical tools or to obtain discretisa-
tion criteria and estimate the error due to a given discretisation of the vibroacoustic
domain.


Chapter 4
The block Gauss-Seidel method in
sound transmission problems
4.1 Introduction
Fluid-structure interaction is the key aspect of many acoustic problems of practical
interest. This is the case, for instance, of sound propagation through partitions in
buildings. Finite element discretisation of this coupled problem leads to a coupled
linear system of equations. In the more widely used formulations, the unknowns
are acoustic pressures and structural displacements (see Morand and Ohayon (1992),
among many others). The diagonal blocks in the global matrix are typically symmetric
and indefinite, but the off-diagonal blocks (which represent the coupling between the
acoustic fluid and the elastic structure) break the symmetry of the global matrix.
For this reason, a monolithic solution approach requires the use of general solvers
for unsymmetric and indefinite matrices, such as Crout factorisation or GMRES iter-
ations with an appropriate preconditioner Barrett et al. (1994),Saad (2000). Alterna-
tively, block iterative solvers can be used. By doing so, the symmetry of the diagonal
blocks can be exploited, and the storage requirements are decreased.
The block Gauss-Seidel iterative solver is considered here. The well-known conver-
gence condition (spectral radius of iteration matrix smaller than one) is interpreted
77

78 The block Gauss-Seidel method in sound transmission problems
from a physical viewpoint, by considered simple, one-dimensional vibroacoustic mod-
els. This analysis shows the detrimental effect on the convergence of the iterative
solver of i) the excitation frequency being close to an acoustic or structural eigenfre-
quency and ii) the level of coupling between the acoustic fluid and the structure.
An outline of the chapter follows. The block Gauss-Seidel solver and block iterative
solvers in vibroacoustics are reviewed in Sections 4.2 and 4.3. The influence of the
degree of coupling is discussed in Section 4.4. The convergence condition and its
physical interpretation are covered in Sections 4.5 and 4.5.2. The application examples
of Section 4.6 corroborate this interpretation, and motivate the selective coupling
strategy presented in Section 4.7, which is applied to the problem of sound propagation
through double walls. The concluding remarks of Section 4.8 close the chapter.
4.2 The block Gauss-Seidel algorithm
The block Gauss-Seidel algorithm will be presented in matrix form. The coupled
system of linear equations is
[F CFS
CSF S
]xF
xS
=
fF
fS
(4.1)
The pressure-displacement formulation is taken as reference here. F is the flexibility
matrix governing the fluid domain with unknown values xF (typically pressures) and
S is the stiffness matrix governing the structural domain with unknown values xS
(typically displacements and rotations). If FEM is used, F and S are typically sparse,
symmetric and indefinite matrices. fF and fS are the forces acting in the fluid and
structural domains. The coupling is taken into account by means of matrices CFS
and CSF . The forces acting on the structure due to the acoustic pressures in the fluid
are
fSF = CSFxF (4.2)

4.2 The block Gauss-Seidel algorithm 79
and the acoustic forces in the fluid contour caused by the structural vibrations are
fFS = CFSxS (4.3)
CFS is proportional to ρFω2 and CSF to the contact surface. The global matrix of
Eq. (4.1) is non-symmetric for the more widely used formulations. The block Gauss-
Seidel algorithm is summarised in Table 4.1.
Choose an initial guess x(0)S , x
(0)F
for i = 0, 1, 2, . . .
Fx(i+1)F = fF − CFSx
(i)S
Sx(i+1)S = fS − CSFx
(i+1)F
check convergence; continue if necessary
end
Table 4.1: The block Gauss-Seidel method
The initial guess can be chosen as the solution of the uncoupled problems. The
convergence is checked by means of the relative errors in the solution
e(i)F =
∣∣∣∣x(i)F − x
(i+1)F
∣∣∣∣∣∣∣∣x(i+1)
F
∣∣∣∣ ; e(i)S =
∣∣∣∣x(i)S − x
(i+1)S
∣∣∣∣∣∣∣∣x(i+1)
S
∣∣∣∣ (4.4)
and the relative residual
r(i)F =
∣∣∣∣Fx(i)F + CFSx
(i)S − fF
∣∣∣∣∣∣∣∣fF
∣∣∣∣ (4.5)
The two systems of equations in Table 4.1 have to be solved several times with
different force vectors but constant matrices F and S. This has to be exploited
for maximum efficiency. A first option is to use a direct solver (for small matrix
dimensions) and save the factorisation of the matrices. Another possibility is to use
the adequate iterative solver (GMRES, MINRES,... see Barrett et al. (1994); Saad
(2000) for more details and Balay et al. (2001), Balay et al. (2004), Balay et al. (1997)
for robust implementations) and save the preconditioner, which is calculated only once

80 The block Gauss-Seidel method in sound transmission problems
for i = 0 and can be reused for the successive iterations. Wave problems often require
to perform calculations for successive frequencies or different types of force terms.
Matrices are then very similar. The possibility of using the same preconditioner for
several successive frequencies has also to be considered.
4.3 Review of block iterative solvers in acoustics
The block Gauss-Seidel method can be understood as a domain decomposition method.
These methods base their efficiency in the splitting of the physical domain of the prob-
lem into smaller subdomains. The system of equations is then solved at two different
levels. On the one hand each subdomain and on the other hand the continuity between
them. These techniques have been mainly designed to be used in parallel computing
machines. Each CPU deals with a single smaller domain using the more adequate
solver for each region.
In Farhat et al. (2000) and Farhat et al. (2000) domain decomposition techniques
have been used in order to solve scattering problems governed by the Helmholtz
equations in big physical domains. The continuity of the pressure field (and its nor-
mal derivative) in the interface between regions is imposed by means of Lagrange
multipliers. Moreover each subdomain has to be regularised by means of fictitious
boundary conditions in order to avoid problems caused by artificial eigenfrequencies.
The method has also been used for vibroacoustic problems. In Mandel (2002) the
partitions have been done in both the acoustic domains and the structure. Finally, in
Feng (1998), Cummings and Feng (1998) and Feng and Xie (1999), block Jacobi and
block Gauss-Seidel algorithms have been used for vibroacoustic problems where the
decomposition of the domain strictly respects the physical regions (fluid and struc-
ture). The only interface between subdomains is the fluid-structure boundary. Since
the goal of the authors is to propose a general solver (also for strongly coupled prob-
lems) their discussion is focused on the convergence of the methods. It seems clear
that using the physical interface conditions in order to transfer information between
fluid and structural subdomains leads to divergence in a large number of situations.

4.4 Influence of the degree of coupling 81
They propose relaxed coupling conditions that cause the block Gauss-Seidel algorithm
to have fast convergence for all the analysed situations. However, the application ex-
amples shown using this method are rather poor (as well as the information of the
physical data employed in the examples and the numerical parameters used to ensure
convergence). The performance of the modified algorithms around the eigenfrequen-
cies of the problem has not been analysed. Moreover, the use of the modified interface
conditions require some modifications at finite element level.
4.4 Influence of the degree of coupling
It is important here to distinguish between the coupling understood as a physical
phenomenon and the consequences of coupling for the block Gauss-Seidel algorithm
or the organisation of the blocks in the algorithm. Based on these two concepts three
different situations can be described.
First the problems where the physical coupling is weak and decoupled solving
strategies are adequate. This is a frequent situation in sound transmission problems.
In those cases the interaction forces are small (at least the forces of the fluid over
the structure). The decoupled strategy is also called chained approach and can be
understood as a single iteration of the block Gauss-Seidel solver with the appropriate
ordering of blocks. The global system is solved in a successive way. The domain with
acoustic sources is firstly solved. The obtained pressure is imposed on the structure
and finally the obtained displacement field is used to generate sound in the receiving
acoustic domain. If the excitation is a mechanical force, the structural problem is
firstly solved. The main problem of assuming weak coupling between the acoustic
domains and the structure is that there is no practical criterion to check the validity
of the hypothesis. It depends on too many factors (geometrical dimensions of the
problem, physical data, analysed frequency).
The second type of problems that can be distinguished are those where the physical
coupling is important, the chained approaches lead to solutions with significant errors
but the block Gauss-Seidel solver can be used and converges. Examples are shown in

82 The block Gauss-Seidel method in sound transmission problems
Section 4.6.3.
Finally, there are also situations that are strongly coupled from a physical point of
view and where a standard block Gauss-Seidel solver without modifications cannot be
used, because it diverges. Typical examples are coupled problems with dense fluids
(Section 4.6.2) and sound transmission problems with double walls (Section 4.7).
Our reasons for the use of the standard block Gauss-Seidel vs. a monolithic solver
are:
1. No assumptions on level of coupling. Since the iterations are not stopped till
convergence is reached, the hypothesis of weak coupling is not necessary (how-
ever, if it is true, iterations are drastically reduced). As will be shown below,
one iteration (like in chained approaches) or two are enough for weakly cou-
pled situations. However, when necessary (due to strong coupling), the solver
automatically iterates in order to reduce errors.
2. Increase of efficiency and decrease of calculation times. The calculations pre-
sented here have not been performed using parallel processing machines (which
is one of the goals of domain decomposition methods). A single CPU has been
used. However, it is more efficient to solve a vibroacoustic problem using a block
Gauss-Seidel procedure than a solver considering the global matrix.
3. Improvement of storage costs. In the context of an analysis in the frequency
domain where multiple frequencies have to be considered, the use of block Gauss-
Seidel implies an improvement in the storage of coupling matrices. The coupling
force vectors are obtained from a function where the coupling matrix is an input
parameter. The pulsation of the problem or the density can be other input
parameters. The outputs are fFS and fSF . Only one coupling matrix (with
basically geometrical information) is then required for each acoustic domain.
On the contrary, for coupled problems this cost is multiplied by three: one
matrix has to be stored to be used for other frequencies and the global system
of equations includes two coupling matrices per acoustic domain.

4.5 Analysis of the block Gauss-Seidel method 83
4.5 Analysis of the block Gauss-Seidel method
4.5.1 The convergence condition
As other stationary iterative methods, the block Gauss-Seidel algorithm converges if
the spectral radius ρ (i.e. the maximum modulus of the eigenvalues) of the iteration
matrix G is less than one, see Saad (2000). The algorithm in Table 4.1 can be
rewritten as
x
(i+1)F
x(i+1)S
=
[0 −F−1CFS
0 S−1CSFF−1CFS
]x
(i)F
x(i)S
+
F−1fF
S−1 (fS − CSFF−1fF )
(4.6)
The iteration matrix G is the matrix in Eq. (4.6), so the convergence condition is
ρ(S−1CSFF
−1CFS
)< 1 (4.7)
4.5.2 Physical interpretation of the convergence condition
The simplified model of Fig. 4.1 will be used in order to understand and illustrate the
phenomena of vibroacoustic coupling and the performance of the block Gauss-Seidel
algorithm.
x
K
ΩF
M
u(t)
vn
ρF , c
l
Figure 4.1: Simple one-dimensional coupled system with two degrees of freedom.
A vibrating mass is coupled with an acoustic domain. Both can be excited: the
mass by means of an exterior force F (t) = Reϕeiωt
and the acoustic fluid cavity by
an exterior imposed velocity vnnn. Note that the model is formulated for a unit surface.

84 The block Gauss-Seidel method in sound transmission problems
Thereby ϕ is the phasor of force per unit surface, and M and K the mass and stiffness
per unit surface.
The interaction between the acoustic fluid and the single mass can be characterised
by the pressure applied by the fluid on the mass and the displacement imposed by
the mass at the acoustic contour.
The governing equation and boundary conditions for the fluid domain are
d2 p(x)
d x2+ k2p(x) = 0 x in ΩF (4.8)
d p(x)
d x
∣∣∣x=0
= ρFω2u (4.9)
d p(x)
d x
∣∣∣x=`
= −ρF iωvnnn (4.10)
and if the frequency of the problem is a real value, the pressure field is
p(x) = C1 cos(kx) + C2 sin(kx) (4.11)
where C1 and C2 are unknown complex constants. Taking into account the dynamic
equilibrium of the single mass, a linear system with three equations results:
sin(k`) − cos(k`) 0
0 1 −ρFωc1 0 K − ω2M
C1
C2
u
=
ρF icvnnn
0
ϕ
(4.12)
This system is the particularisation for this simple one-dimensional example of Eq. (4.1).
The convergence condition (4.7) leads to
ρ (G) =cos (k`) ρFωc
sin (k`) (K − ω2M)< 1 (4.13)
A similar analysis can be done for the one-dimensional situation with two fluid do-
mains studied in Section 3.2. The expression of the spectral radius is
ρ (G) =ρFωc
K − ω2M
(cos (k`1)
sin (k`1)+
cos (k`2)
sin (k`2)
)(4.14)

4.5 Analysis of the block Gauss-Seidel method 85
Several conclusions can be obtained from Eqs. (4.12) and (4.13). The method is less
efficient for denser fluids (i.e. larger density ρF ) or fluids with higher wave speed c,
because the coupling between the structure and the fluid increases.
The geometry of the problem is also important. For this one-dimensional case, the
geometry is represented by terms cos (k`) and sin (k`). If sin(k`) ≈ 0 the method will
not converge. This happens for the eigenfrequencies of the acoustic cavity, k = nπ/`,
but also when ` is very small (small fluid domains). If cos(k`) = 0 the method
converges in one iteration. This is a very specific situation of the one-dimensional
model and cannot be generalised to higher dimensions.
Note that the method also diverges for frequencies close to the structural eigenfre-
quency√K/M . Finally, Eq. (4.13) also shows that the performance of the iterative
solver increases with the frequency.
A similar parameter (λ = ρF c/ρStω) has been defined by Atalla and Bernhard
(1994). t is the typical thickness of the structure and ρS its density. However, λ does
not take into account the influence of the geometry nor the stiffness.
By condensing out the unknown C2 and noting from Eq. (4.11) that C1 is p(x = 0),
system (4.12) can be recast as
[sin(k`) −ρFωc cos(k`)
1 K − ω2M
]p(x = 0)
u
=
ρF icvnnn
ϕ
(4.15)
and ρ (G) can then be viewed as the ratio of stiffness of the fluid and the structure,
including the effect of coupling:
ρ (G) =(d p(x = 0)/d u)F(d p(x = 0)/d u)S
(4.16)
The subscript F (S) means here derivative from the point of view of the fluid (struc-
ture).
The conceptual behaviour of the fluid-structure system has been plotted in Fig. 4.2.
The harmonic equilibrium is reached at the pair x∗
S−x∗
F . The acoustic pressure caused

86 The block Gauss-Seidel method in sound transmission problems
by the structural displacement is
xFS = −F−1CFSx∗
S (4.17)
and the displacement caused by the pressure is
xSF = −S−1CSFx∗
F (4.18)
They are caused by the coupling effect.
xF
*xS
xFunc.
xSunc.
xS
xFS
xSF
*
1
xF 1
FLUIDSTRUCTURE
−1−F CFS
−S C−1
SF
Figure 4.2: Conceptual behaviour of a coupled fluid-structure system.
Fig. 4.3 shows a sketch of the convergence and divergence of the algorithm de-
pending on the spectral radius.

4.6 Application examples 87
Gρ( ) < 1
Sx(0)Sx(2)
Fx(1)Fx(2)
xS
xF
Sx(1)
Fx *
Sx *
STRUCTURE
FLUID
(a)
Sx(0)Sx(1)
Fx(1)
Gρ( ) > 1
xS
xF
Fx *
Sx *
FLUID
STRUCTURE
(b)
Figure 4.3: Convergence of the block Gauss-Seidel algorithm: (a) Convergence forρ(G) < 1; (b) Divergence for ρ(G) > 1.
4.6 Application examples
The performance of the block Gauss-Seidel method is illustrated here with various
two-dimensional vibroacoustic problems (sound transmission through a single wall).
The goal is to illustrate the influence on the convergence of the iterative solver of
i) the damping, ii) the coupling between fluid and structure and iii) acoustic and
structural eigenfrequencies. A FEM-FEM approach (i.e. finite elements for the fluid
and acoustic domains) is used here. In Chapters 6 and 8, the algorithm is used to solve
realistic three-dimensional problems treated with the combined modal-FEM approach
presented in Chapter 5.
4.6.1 Influence of damping
Two acoustic domains are separated by a single wall (represented in this two-dimen-
sional setting by a concrete beam), see Fig. 4.4. The acoustic excitation is a punctual
sound source placed in the left bottom corner of the first domain, at a distance of 0.5

88 The block Gauss-Seidel method in sound transmission problems
m to the contours. The room dimensions are 3 × 3 m2 and 4 × 3 m2. The material
and geometrical parameters are summarised in Table 4.2. Note that we are dealing
with air, which is a very light fluid. This is the typical situation where the method
will have a very good behaviour. A relative tolerance of 10−9 is used in the stopping
criteria defined in Eqs. (4.4) and (4.5)
1 m
Sound source
Robin or pure reflectingboundary
Structural element(Euler beam)
Figure 4.4: Sound transmission through a single wall
STRUCTURE
Meaning Symbol Heavy Lightweight
Young’s modulus E 2.943 · 1010 N/m2 4.5 · 109 N/m2
Poisson’s ratio ν 0.25 0.25
Wall density ρS 2500 kg/m3 913 kg/m3
Wall thickness t 0.10 m 0.013 m
Loss factor η 0 − 5 % 0 − 5 %
FLUID
Meaning Symbol Value
Speed of sound c 340 m/s
Density of fluid ρF 1.18 kg/m3
Source strength Q 0.005i m3/s
Acoustic absorption α 0 − 30 %
Table 4.2: Material parameters for the acoustic and structural domains
Two different situations have been analysed. On the one hand, an undamped

4.6 Application examples 89
problem (no acoustic absorption and no structural damping). On the other hand,
the same problem with an acoustic absorption of 30% at the boundaries (introduced
by means of a Robin boundary condition) and hysteretic structural damping (5%).
These are reasonable values, which have not been chosen for numerical convenience.
The results (number of iterations required) have been plotted in Fig. 4.5. Note
that damping considerably decreases the number of iterations required, especially near
eigenfrequencies.
0
10
20
30
40
50
20 40 60 80 100 120 140 160 180 200
f (Hz)
Iterations Eig. ΩF
(1) Eig. ΩF
(2) Eig. Structure
(a)
0
10
20
30
40
50
20 40 60 80 100 120 140 160 180 200
f (Hz)
Iterations Eig. ΩF
(1) Eig. ΩF
(2) Eig. Structure
(b)
Figure 4.5: Iterations of the block Gauss-Seidel solver: (a) undamped problem; (b)damped problem (30 % acoustic absorption and 5 % structural damping). Eigenfre-
quencies of the sending and receiving domains, Ω(1)F and Ω
(2)F , and the structure are
also shown.
4.6.2 Influence of the fluid density
The example of Section 4.6.1 (concrete wall and damping) is solved now for increasing
values of the fluid density (ρF , 10ρF and 30ρF ) and a constant frequency of 100 Hz.
The only parameter that has been changed besides the density is the admittance A
of the acoustic contours, in order to keep a constant value of absorption (30 %). In
view of the positive effect of damping pointed out in Section 4.6.1, this precaution is
necessary for a fair comparison.

90 The block Gauss-Seidel method in sound transmission problems
The convergence results (relative error vs. iterations) of Fig. 4.6 show the expected
behaviour. The convergence rates (i.e. absolute value of the slope) are 2.05, 0.92 and
0.43 for fluid density ρF , 10ρF and 30ρF respectively. When the density is increased
by a factor of 10 (30), the convergence rate decreases by 1.13, (1.62), close to the
theoretical value of log10 10 = 1 (log10 30 = 1.48).
As discussed in Section 4.5.2, taking a larger fluid density increases the coupling
between the acoustic and structural domains. The eigenfrequencies are virtually un-
changed by these modifications in fluid density and admittance, so 100 Hz is not
close to an eigenfrequency for any of the three cases. Thus, changing ρF can be
regarded as a ‘clean’ way of modifying the degree of coupling without affecting the
frequency spectrum. If one plays with the wave speed c, on the contrary, the problem
eigenfrequencies change.
1e-09
1e-08
1e-07
1e-06
1e-05
1e-04
0.001
0.01
0.1
1
10
0 5 10 15 20
e F(i)
i
ρF = 1.18 kg/m3
ρF = 10•1.18 kg/m3
ρF = 30•1.18 kg/m3
Figure 4.6: Influence of the fluid density in the convergence of the block Gauss-Seidelalgorithm
4.6.3 Influence of particular eigenfrequencies
The performance of the block Gauss-Seidel solver for three particular frequencies has
been analysed. The example of Section 4.6.1 has been considered (damped situation).

4.7 The case of double walls: selective coupling of fluid domains 91
The aim of the analysis is to show differences in the efficiency of the method depending
on the type of eigenfrequencies that are close to the excitation frequency. The studied
frequencies are: i) 70 Hz, which is close to uncoupled eigenfrequencies of the structure
(70.83 Hz) and the receiving room (69.27 Hz); ii) 90 Hz, which is not close to any
of the eigenfrequencies of the problem; iii) 156 Hz, which is close to an uncoupled
eigenfrequency of the structure (156.22 Hz).
Results are presented in Fig. 4.7. The better convergence is found for the case ii)
that is not affected by any eigenfrequency of the problem. More iterations are required
in situations i) and iii). The eigenfrequencies of the problem increase the value of the
spectral radius of the iteration matrix. This phenomenon has already been predicted
in the one-dimensional model presented in Section 4.5.2, see Eqs. (4.13) and (4.14).
The evolution of the relative error of the spatial averaged mean pressure < p2rms >
(the most frequently used output in sound transmission) is shown in Fig. 4.7(b).
prms = |p|/√
2 is the root mean square pressure that can be obtained from the pressure
phasor p. For most of the excitation frequencies, the error is small from an engineering
point of view (< 10 %) after just two iterations. However, for excitation frequencies
that are close to the eigenfrequencies or for undamped problems, the error is larger
and more iterations are needed.
4.7 The case of double walls: selective coupling of
fluid domains
All the examples shown in Section 4.6 deal with single walls. For typical geomet-
rical and material parameters, the acoustic domains (sending and receiving rooms)
and the structure are weakly coupled, and thereby chained approaches have a good
performance.
This is not the case, however, for double walls (consisting on two leaves separated
by a cavity, either filled with an acoustic absorbing material or not), see Fig. 4.8.
For these applications, a chained approach or even the iterative block Gauss-Seidel
method are not efficient or diverge. The reason is that the air cavity between walls is

92 The block Gauss-Seidel method in sound transmission problems
1e-10
1e-08
1e-06
1e-04
0.01
1
0 2 4 6 8 10 12 14
e F(i)
i
f = 70 Hz f = 90 Hz f = 156 Hz
1e-08
1e-07
1e-06
1e-05
1e-04
0.001
0.01
0.1
1
0 2 4 6 8 10 12 14
|(<
p rm
s2 >)(i)
- (
<p r
ms2 >
)(*) |/(
<p r
ms2 >
)(*)
i
f = 70 Hz f = 90 Hz f = 156 Hz
(b)
Figure 4.7: Behaviour of block Gauss-Seidel solver for several particular eigenfrequen-cies: (a) Relative error in the sending domain; (b) Relative error of < p2
rms > in thereceiving domain.
usually small (cavity thickness between 2 cm and 8 cm), and thereby, k` is also small.
As shown in Section 4.5, this increases the stiffness of the acoustic domain and causes
the divergence of the block Gauss-Seidel algorithm.
Ω F(3) Ω F
(4) Ω F(5) Ω F
(6)
Ω F(1)
Ω F(2)
Figure 4.8: Sketch of a double wall. The sending and receiving rooms (1 and 2)are weakly coupled with the structure while the cavities (3, 4, 5 and 6) are stronglycoupled. This information is used in the solver.
To overcome these difficulties, we present here a modification of the block Gauss-
Seidel algorithm. The goal is to deal with situations where some of the fluid domains
are strongly coupled to the structure. The matrices in Eq. (4.1) can be written in

4.7 The case of double walls: selective coupling of fluid domains 93
detail as
F =
F(1) 0 · · · · · · 0
0 F(2) . . ....
.... . .
. . .. . .
......
. . .. . . 0
0 · · · · · · 0 F(n)
(4.19)
and
CFS =
C(1)FS
C(2)FS
...
...
C(n)FS
CSF =[
C(1)SF C
(2)SF · · · · · · C
(n)SF
](4.20)
where n acoustic domains are assumed.
A selective coupling strategy will be used. The m problematic fluid domains will
now be solved together with the structure. They are in general the smaller fluid
domains (i.e. the air cavities inside the double wall, see Fig. 4.8), which are strongly
coupled with the structure. A new matrix for the structural part of the problem
including these coupled acoustic domains can be written as
S∗ =
F(1) 0 · · · 0 C(1)FS
0. . .
. . ....
......
. . .. . . 0
...
0 · · · 0 F(m) C(m)FS
C(1)SF · · · · · · C
(m)SF S
(4.21)
The double wall in Fig. 4.8 is a typical situation where this selective coupling is very
efficient. The sending room Ω(1)F and the receiving room Ω
(2)F are weakly coupled with
the structure, so the matrices describing this part of the problem are considered as
independent blocks. On the contrary, the cavities between leaves (acoustic domains
Ω(3)F , Ω
(4)F , Ω
(5)F and Ω
(6)F ) are strongly coupled with the structure, so their related

94 The block Gauss-Seidel method in sound transmission problems
matrices are solved in the same block as the structural part of the problem, in matrix
S∗.
Due to this coupling, matrix S∗ loses the symmetry of matrix S, so an unsymmetric
solver is required. However, the coupled acoustic domains are small and the increase
in the size of the matrix is moderate. Apart from the definition of matrix S∗, the rest
of the iterative process remains unchanged.
4.7.1 Validation: one-dimensional example
The selective coupling strategy has been used in order to solve the one-dimensional
problem for layered partitions presented in Section 3.4. The example of Section 3.4.3
with data in Table 3.10 has been used to illustrate the performance of selective cou-
pling, as compared to the standard block Gauss-Seidel algorithm. Note that there is
no damping.
In Fig. 4.9(a) the spectral radius of the iteration matrix for several values of the
cavity thickness is shown. The frequency of the problem is 100 Hz, not close to any
eigenfrequency. The standard algorithm only converges for wide air cavities, whereas
selective coupling converges for all the thickness range.
Fig. 4.9(b) shows the evolution of the spectral radius with frequency for the case
of a 7 cm thick cavity. Again, only selective coupling is convergent for all the range
of interest (problems around eigenfrequencies are caused by the lack of damping).
4.7.2 Application: two-dimensional example
Selective coupling has also been used for two-dimensional problems. The example of
Fig. 4.4 is solved again, but replacing the single wall by a lightweight double wall.
The material and geometrical data of the leaves can be found in Table 4.2. The
cavity between leaves is 0.07 m thick. Two cases have been considered: air cavity and
absorbing material (resistivity % = 104 N/ (s · m4)). The acoustic absorption is 30 %
and the structural damping 5 %.
The two larger acoustic domains have been considered as independent blocks while

4.7 The case of double walls: selective coupling of fluid domains 95
0.01
0.1
1
10
0 0.05 0.1 0.15 0.2 0.25
ρ(G
)
l3 (m)
Standard BGS Selective coupling
(a)
0.001
0.01
0.1
1
10
100
200 160 125 100 80 63 50 40 31.5
ρ(G
)
f (Hz)
Standard BGS Selective coupling
Eig. ΩF(1)
Eig. ΩF(2)
(b)
Figure 4.9: Selective coupling strategy applied to a one-dimensional model for a doublewall. Evolution of the spectral radius of the Gauss-Seidel iteration matrix: (a) vs.cavity thickness, for a constant frequency of 100 Hz; (b) vs. frequency, for a constantthickness of 0.07 m.
the acoustic cavity between leaves and the structural matrix, as well as the coupling
matrices between them, have been assembled together in S∗. The number of iterations
required vs. the frequency has been plotted in Fig. 4.10, for both the standard block
Gauss-Seidel and the selective coupling strategies.
It has to be noted that an iteration of the selective coupling strategy is computa-
tionally more expensive because of the cost of solving the linear system with matrix
S∗ (as compared to solving a system with matrix S and other small systems with
matrices F(j)).
However, this fact is more than compensated by the better convergence behaviour
of selective coupling. The convergence is quickly reached in all the frequency range;
eigenfrequencies do not drastically increase the number of iterations. In fact, the only
situation of non-convergence takes place for the mass-air-mass resonance of the wall.
This is an eigenfrequency that couples all the subdomains of the problem (for more
details, see Fahy (1989)). For the studied double wall it is 91.2 Hz. This only happens
for double walls without absorbing material placed in the cavity.

96 The block Gauss-Seidel method in sound transmission problems
0
20
40
60
80
100
50 100 150 200 250
f (Hz)
Selective Coupling Standard BGS Eig. ΩF
(1)
Eig. ΩF(2)
Eig. Leaves Nonconvergence
(a)
0
20
40
60
80
100
50 100 150 200 250
f (Hz)
Selective Coupling Standard BGS Eig. ΩF
(1)
Eig. ΩF(2)
Eig. Leaves Nonconvergence
(b)
Figure 4.10: Application of the selective coupling to a problem of sound transmissionthrough a lightweight double wall. Iterations required for each algorithm: (a) aircavity; (b) absorbing material. Tolerance: = 10−9; maximum number of iterations:100.

4.8 Concluding remarks 97
As shown in Fig. 4.10, when the problem is solved by means of a totally un-
coupled procedure (i.e. standard block Gauss-Seidel), convergence is rarely reached.
Sound transmission through double walls is a clear example where selective coupling
is necessary.
4.8 Concluding remarks
The performance of the block Gauss-Seidel solver for interior vibroacoustic problems
has been assessed both analytically and numerically. A physical interpretation of the
well-known convergence condition (spectral radius of iteration matrix smaller than
one) is provided. For simple one-dimensional problems, analytical expressions of the
spectral radius have been obtained.
These expressions clearly reveal the negative impact of a strong coupling between
the acoustic domains and the structure. Even for moderate degrees of coupling, the
usual chained approach (which may be regarded as one block Gauss-Seidel itera-
tion with the appropriate ordering of blocks, along sound trajectory) is not accurate
enough, and iterations up to convergence are required.
For larger degrees of coupling, these iterations may fail to converge. This is the
case, for instance, in the numerical simulation of sound transmission through double
walls: the two leaves and the small acoustic cavity between them are strongly coupled.
This observation has suggested a selective coupling strategy, where the structure
and the problematic acoustic domains (e.g. the cavity in a double wall) are treated
together, in the same block.
The convergence analysis also shows the negative effect of an excitation frequency
close to an (acoustic or structural) eigenfrequency for undamped problems. However,
the convergence improves significantly if one uses realistic values of structural damping
and acoustic absorption.
One and two-dimensional numerical examples have been used to illustrate the
capabilities of the block Gauss-Seidel solver. The systematic use of this solver for the
numerical simulation of sound transmission through single and double walls will be

98 The block Gauss-Seidel method in sound transmission problems
reported in Chapter 6 and for flanking transmissions in Chapter 8.

Chapter 5
Combined modal-FEM approach
for vibroacoustics
5.1 Introduction
Accurate predictions of sound transmission through room partitions are important
for the building industry. The development of new solutions or the improvement of
existing construction technologies require the use of prediction tools. The increase in
the isolation capacities is often caused by the modification of some construction de-
tails in the structure (use of new materials, improved connections between elements,
modification of the shape and size of some of the components,...) and some of the
existing models cannot deal correctly with them due to their simplifying assump-
tions (use of unbounded acoustic domains and structures, simplifications in geometry
descriptions).
An alternative is to do some engineering simplifications and combine numerical
methods with other approaches such as statistical methods or analytical solutions.
Very often the outputs of interest in sound transmission problems are averaged quan-
tities and the additional information provided by a numerical method or an analytical
solution is not necessary. When we are studying the acoustic isolation capacity of a
wall, the most important part of the problem is the structure. We are mainly inter-
99

100 Combined modal-FEM approach for vibroacoustics
ested in measuring how can the mechanical, physical and geometrical properties of
the wall improve its performance. Nevertheless the computational cost of modelling
the rooms surrounding the wall is frequently larger than the computational cost of
the wall itself. The correct modelling of the acoustic part of the problem (sound gen-
eration, acoustic domains like rooms, acoustic absorption) is also necessary but it can
be simplified.
In this chapter, the acoustic domains are supposed to be cuboids. This is a reason-
able hypothesis that considerably diminishes the computational cost of the problem.
The larger acoustic domains (source and receiving rooms) can then be solved using a
modal analysis with known eigenfrequencies and eigenfunctions, while the structure
(and the interior acoustic cavities in the wall, if necessary) are solved using the finite
element method. Similar models have been proposed in the literature (i.e. Gagliardini
et al. (1991), Davidsson et al. (2004), Jean et al. (2006)). Here, a block organisation of
the model and a FEM description of the structure enable the extension of the model
to situations not allowing the assumption of chained approaches (double walls) as well
as the study of more complex structures (flanking transmissions).
This assumption on the geometry of the acoustic domains has been frequently
exploited before in the study of sound transmission. In Josse and Lamure (1964)
the sound transmission of an homogeneous supported plate between rooms is studied
using modal analysis for the acoustic domains and for the plate. The most impor-
tant resonance effects taking into account the possible matching between the shape
of acoustic and solid modes are described. They are basically the forced sound trans-
mission, the resonant transmission and the coincidence effect. In the first case, the
transmission is mainly caused by the geometrical similarity between the shape of the
pressure field and the vibration field on the wall. In the second situation, the vibration
field on the wall is mainly caused by modes with an eigenfrequency that is similar to
the excitation frequency. Finally, the coincidence effect occurs when the wave lengths
of the acoustic and structural modes directly excited by the frequency of the problem
are similar.
Gagliardini et al. (1991) follow the same idea but consider a baffled plate between

5.1 Introduction 101
rooms. More recently, in Jean and Roland (2001) and Jean and Rondeau (2002),
a similar idea has been employed in order to study the sound transmission through
plates modelled with finite elements or by means of modal analysis taking into account
different types of boundary conditions. Comparisons between laboratory experimen-
tal data and this kind of models can be found in Jean et al. (2006). Moreover, a sketch
on how to combine commercial finite element software with in-house made software
dealing with simplified descriptions of the acoustic domains is given. All these refer-
ences deal with acoustic domains that are softly coupled. Chained approaches (where
first the sending domain is solved, afterwards the obtained pressure field is applied on
the structure and finally the velocity field of the structure is used to generate sound
in the receiving room) must be applicable. If there are acoustic cavities that cannot
be uncoupled in the solving procedure, the resolution has to be performed with an
external vibroacoustic code (the acoustic domains have to be solved at the same time
than the structure).
In Davidsson et al. (2004) the analysis has been extended to double walls. Coupling
is considered in order to deal with interior cavities in the double wall. The increase of
computational cost due to coupling restricts the obtained results to the low frequency
range (frequency bands under 200 Hz, with a maximum room dimension of 5.2 m).
In Brunskog and Davidsson (2004) the rooms are considered like waveguides (tubes).
Since the rooms are then unbounded, the pressure method is no longer valid. The
sound reduction index is then obtained by means of measurements of the incident and
radiated intensities in both faces of the wall.
The aim of this chapter is to present a model combining modal analysis and
FEM and to analyse some aspects related to its numerical performance and modelling
details. Some validation examples will also be presented. The systematic application
of the modelling tool to the problem of sound transmission, however, is not included
here but in Chapters 6 and 8.
The chapter is organised as follows. In Section 5.2 the basic equations are pre-
sented. An analysis of the computational costs is done in Section 5.3. One-dimensional
examples that illustrate the main aspects of the use of modal-FEM models for sound

102 Combined modal-FEM approach for vibroacoustics
transmission problems are shown in Section 5.4. Both numerical aspects related with
the performance of the model and physical details important for the correct modelling
are analysed in Section 5.5. Finally some validation examples are shown in Section 5.6
before the conclusions of Section 5.7.
5.2 Formulation of the model
The formulation of a vibroacoustic problem by means of the finite element method
has been detailed in Chapter 2. It can also be found in Zienkiewicz and Taylor
(2000), Everstine (1997) and Atalla and Bernhard (1994) among others. Only the
modifications caused by the use modal analysis in some of the acoustic domains will
be explained.
If the acoustic domains are cuboids, the eigenfunctions are
ψ (x, y, z) = cos
(nxπ
`xx
)cos
(nyπ
`yy
)cos
(nzπ
`zz
)nx, ny, nz = 0, 1, 2, . . . (5.1)
and the eigenfrequencies are
fi =cki2π
with k2i (nx, ny, nz) =
(nxπ
`x
)2
+
(nyπ
`y
)2
+
(nzπ
`z
)2
(5.2)
where ki (nx, ny, nz) is the wave number of the eigenfrequency i, defined by the number
of half-waves in each direction nx, ny and nz. c is the speed of sound and `x, `y, `z
are the dimensions of the cuboid.
These eigenfunctions can be used in order to solve the acoustic problem (for an
arbitrary frequency f) in a modal way. The pressure phasor p can be interpolated
using a basis of eigenfunctions
p(xxx) =∑
j
ajψj(xxx) (5.3)
aj are the modal contributions. Replacing Eq. (5.3) in Eq. (2.8), including the punc-
tual sound sources and using the eigenfunctions as test functions, the integral formu-

5.2 Formulation of the model 103
lation of the acoustic problem can be obtained
∑
j
aj(k2 − k2
i
) ∫
Ω
ψi(xxx)ψj(xxx)dΩ −∑
j
aj
∫
∂Ω
ψj(xxx) 5nnn ψi(xxx)dΓ
−iρ0ω
∫
ΓN
vnnnψi(xxx)dΓ +∑
j
aj (−iρ0ω)
∫
ΓR
Aψi(xxx)ψj(xxx)dΓ+
+ρ0ω2
∫
ΓFS
ψi(xxx)unnndΓ = −∑
s
ρ0iωqs
∫
Ω
δ(xxxs,xxx)ψi(xxx)dΩ (5.4)
Here, ω = 2πf is the pulsation of the problem, vnnn is the phasor of imposed
velocity on Neumann boundaries, A is the admittance in absorbing boundaries, qs is
the phasor of source strength amplitude of the sound source s, unnn is the phasor of
normal displacement of the structure in the coupling contours and δ is the Dirac-delta.
The notation of the boundaries and fluid and solid domains can be seen in Fig. 1.2(d).
ρ0 and k are the density of the acoustic medium and the wave number respectively.
The acoustic medium is typically air, but the modal interpolation can also be used
for absorbing media (see for example Davidsson (2004)). If the acoustic fluid is air,
the density ρ0 and the wave number k = 2πf/c are directly known. In the case of
absorbing media, equivalent fluid models provide frequency-dependent expressions for
ρ0 and k. They also depend on the resistivity of the medium (see for example Delany
and Bazley (1970)). The second integral in Eq. (5.4) vanishes (5nnnψi(xxx) = 0 due to
the type of basis used).
When combined with the other parts of the problem (modelled by means of the
finite element method) the following system of linear equations is obtained:
Ks + iωCs − ω2Ms −LSF −LmodSF
ρ0ω2LFS Kac + iωCac − ω2Mac 0
ρ0ω2Lmod
FS 0 Mψ
u
p
a
=
fs
fac
fmodac
(5.5)
Ks, Cs and Ms are the stiffness, damping and mass matrices of the structure; Mψ,
LmodSF , Lmod
FS and fmodac are the matrices and vector obtained after the use of modal

104 Combined modal-FEM approach for vibroacoustics
analysis for the acoustic domains. They are new blocks in Eq. (5.5) with respect
to Eq. (2.21). The existence of acoustic domains modelled with FEM has also been
considered. Kac, Cac and Mac are the stiffness, damping and mass matrices of these
acoustic domains; LSF and LFS are FEM coupling matrices between the acoustic
domains modelled with FEM and the structure. It is the case of a double wall where
the rooms are modelled using modal analysis and the air cavity between leaves by
means of finite elements. If FEM is not used, the second row and column in Eq. (5.5)
can be suppressed. The expression for Mψ is
(Mψ)ij
= δij(k2 − k2
i
) ∫
Ω
ψi(xxx)ψj(xxx)dΩ − iρaω
∫
ΓR
A(xxx)ψi(xxx)ψj(xxx)dΓ (5.6)
∫
Ω
ψi(xxx)ψi(xxx)dΩ =`x`y`zεxεyεz
with εq =
1 if nq = 0
2 if nq 6= 0(5.7)
nq is the number of half-waves in each direction (q = x, y, z). Note that Mψ can be
a diagonal matrix if no Robin boundary conditions exist or if the coupling between
different eigenfunctions in the Robin contour is neglected (similar assumptions can be
found in Pierce (1981)).
In the cases where Mψ is diagonal, the effect of the absorption is only approximated
by the model. The error caused by considering only diagonal terms is analysed in
Section 5.5.2. Another possibility is the use of eigenfunctions especially generated for
the one-dimensional Helmholtz equation with Robin boundary conditions. Supposing
functions of the type
ψ(s) = C1eiks + C2e
−iks s = x, y (5.8)
the eigenfrequencies of the problem are the zeros of the equation
(cρa(A1A2)
A1 + A2+
1
cρaω(A1 + A2)
)tanh(k`s) + 1 = 0 k ∈ C (5.9)
A1 and A2 are the admittances in s = 0 and s = `s. This procedure is theoretically

5.2 Formulation of the model 105
correct but the cost of generating a modal basis adequate for Robin contours (i.e. with
normal derivative of pressure not null) is high because finding the roots of Eq. (5.9)
in the complex plane is an expensive procedure. It has not been considered in the
present model but these modified shape functions could improve the precision.
The force term of the modal part of the problem is
(fmodac
)i= iρaω
∫
ΓN
vnnn(xxx)ψi(xxx)dΓ −∑
s
ρ0iωqs
∫
Ω
δ(xxxs,xxx)ψi(xxx)dΩ (5.10)
Two terms can be distinguished: due to the imposed vibration in the Neumann con-
tour ΓN and due to the monopole sound sources in the acoustic domain.
The coupling between the cuboid acoustic domains and the structure is modelled
by means of matrices LmodFS and Lmod
SF . These matrices are essentially the same type
of matrices employed for the finite element method (where the structural normal dis-
placement is expressed by means of its interpolation shape functions) but changing
the finite element acoustic test functions by the eigenfunctions ψi (used as test func-
tions for the modal acoustic domains). This change has important implications in
the implementation of the model. The required topological and geometrical data is
quite different. On the fluid-structure contour there are a large number of structural
elements per mode side. The expression of the coupling matrices is
(LmodFS
)ij
=
∫
ΓFS
ψi(xxx)(Nj ·nnn)dΓ ;(LmodFS
)T= −Lmod
SF (5.11)
where Nj are the structural shape functions and nnn the outward normal vector of the
acoustic domain. Note that(LmodFS
)ij
is a row vector where the coefficients are the
structural degrees of freedom of the node j.
In the three-dimensional case, DKT shell elements have been used for the struc-
ture (Batoz (1980) and Batoz (1982)). Linear interpolation has been used for mem-
brane stresses which are less restrictive in terms of meshing requirements. The shape
functions (interpolation of the normal shell displacement) of a DKT element are not
defined. They are necessary for the calculation of the mass matrix (if it is not lumped)
and especially for coupling matrices. We have borrowed them from the plate element

106 Combined modal-FEM approach for vibroacoustics
described in Spetch (1988), which is an already tested solution for dynamic problems
(Mohan (1997)).
An adaptive integration procedure has also been implemented. The key is to take
into account that while the normal displacement field inside a shell element is always
a cubic polynomial, the acoustic wave length is frequency-dependent. Depending on
the ratio between the structural wave length and the acoustic wave length, a different
integration rule has been employed. For the more unfavourable situations, high-order
Gauss quadrature rules have been used (see Cools (2003) and Wandzura and Xiao
(2003)).
5.3 Analysis of computational costs
The main goal of the modal description of acoustic domains is to reduce the computa-
tional costs of solving the vibroacoustic problem. Both memory storage and number
of operations required for each single frequency are important factors. The method
will be now analysed focusing the attention on the simpler case of two rooms sepa-
rated by a single (rather than a double) wall. In that case there is weak coupling
between the rooms and the structure. The block Gauss-Seidel solver (Chapter 4 and
Poblet-Puig and Rodrıguez-Ferran (2008)) is used.
In order to compare the FEM with the combined modal-FEM approach, it will be
assumed that six linear acoustic finite elements per wave length are needed to solve
the Helmholtz equation in the acoustic domains. This requirement could be more
restrictive, especially for mid and high frequencies, if the a priori error estimation
criteria proposed in Ihlenburg (1998) or Bouillard and Ihlenburg (1999) were assumed.
Since the displacement interpolation is done by means of polynomial of degree three,
five finite elements per structural wave length (bending) are considered to be enough.
These two criteria are kept constant throughout the analysis.
The bending wave length on the structure (λbending) and the length of acoustic

5.3 Analysis of computational costs 107
waves in air (λair) can be expressed as
λbending = 2π
(1
ω
) 1
2
(B
ρsolidt
) 1
4
with B =1
12 (1 − ν2)Et3; λair =
c
f(5.12)
where t is the thickness of the shell, ρsolid is the volume density of the shell, ν the
Poisson ratio, E the Young modulus and c the speed of sound in air.
Sending and receiving rooms with the same dimensions `x, `y and `z will be
assumed for simplicity. The wall is considered to be rectangular (with dimensions
`y × `z). The number of nodes in each acoustic domain nac and in the structure ns
are
nac '63`x`y`zλ3air
and ns '52`y`zλ2bending
(5.13)
Sparse storage is used for FEM matrices. It will be assumed that each node in the
acoustic domain is connected to 26 other nodes and that each node in the wall is
connected to eight other nodes. This is approximately true for structured meshes. In
the first case the node belongs to eight linear hexahedra. In the second case, the node
is shared by four linear quadrilaterals. There is one complex unknown per acoustic
node (pi) and six complex unknowns per shell node (three displacements and three
rotations in global coordinates).
The dimensions of the square matrix corresponding to the structure are (6ns) ×(6ns). Assuming again a structured mesh of quadrilaterals with a mean connectivity
between nodes of eight, the non-zero entries per row in a sparse matrix are (6 × 9).
These numbers can be slightly modified depending on the implementation of the
FEM but they will provide a correct approximation of the memory requirements of
the problem.
The number of non-zero entries in the FEM coupling matrix can be estimated
with the following assumptions:
1. The number of acoustic nodes in the fluid-structure interaction contour is ap-
proximately Sstr/`2e,Ac, where Sstr is the surface of the wall and `e,Ac is the mean
size of acoustic finite elements.

108 Combined modal-FEM approach for vibroacoustics
2. The number of structural nodes related to an acoustic node by means of the
integral of the coupling matrix is(√
4`2e,Ac/`2e,Str + 1
)2
, where `e,Str is the mean
size of structural elements. It is assumed that meshes are structured in both
domains.
The size of the modal matrices depend on the dimension of the modal basis. The
number of acoustic modes in an acoustic domain below a frequency f can be estimated
(Pierce (1981)) as
nmod (k) =1
6
`x`y`z2π
k3 +1
4
`x`y + `x`z + `y`z2π
k2 +1
8
`x + `y + `zπ
k +1
8(5.14)
It will be shown later that the series of modes employed in order to interpolate the
pressure field can be truncated. Accurate solutions can be obtained using only the
modes whose associated frequency fi belongs to the frequency band [f − ∆f, f + ∆f ].
The number of modes for the acoustic domain is then nmod (f + ∆f)−nmod (f − ∆f).
In order to translate costs to Megabytes, it will be assumed that a complex coeffi-
cient using double precision variables requires αC = 16 bytes of memory (full matrices)
and a coefficient in a sparse matrix αC + 2αI bytes (taking into account compact row
storage and collateral basic operations). αI = 4 bytes is the cost of storage of an
integer variable. Again, the cost of storage of a sparse coefficient depends on the
implementation but this number can provide a correct approximation.
Number of matrices
Matrix type Memory requirement FEM Modal-FEM
Acoustic Modal (Diagonal) αCnmod 0 1
Acoustic FEM (Sparse) (αC + 2αI) 27nac 3 0
Shell FEM (Sparse) (αC + 2αI) 62ns · 9 3 3
Coupling Modal-FEM (Full) αCnmod6ns 0 1
Coupling FEM (Sparse) (αC + 2αI) 6
(√4`2
e,Ac
`2e,Str
+ 1
)2
Sstr
`2
e,Ac
1 0
Table 5.1: Memory costs for the problem of sound transmission through a single wall,FEM vs. combined modal-FEM approach. The number and required storage for eachtype of matrix are indicated.

5.3 Analysis of computational costs 109
The memory costs of the vibroacoustic problem have been summarised in Table 5.1.
The storage requirements and instances in the two approaches of five types of matrices
are shown. ‘Acoustic modal’ is the diagonal matrix Mψ, Eq. (5.6); ‘Acoustic FEM’
are the acoustic finite element matrices Kac and Mac; ‘Shell FEM’ are the structural
finite element matrices Ks and Ms; ‘Coupling Modal-FEM’ is the (6ns × nmod) full
matrix LmodSF ; ‘Coupling FEM’ is matrix LSF .
Two cases are analysed next. These two situations are the most favourable and
unfavourable for the modal-FEM approach in terms of storage requirements. In the
first example (Fig. 5.1), the structure is a concrete wall and few shell elements are
required. This diminishes the size of the coupling matrix. Moreover, the rooms are
big (`x = 6.5 m, `y = 5.5 m, `z = 3.5 m), and this penalises the use of acoustic
finite elements. Modal analysis can then be more efficient. The inverse situation is
found in Fig. 5.2. A plasterboard is placed between two rooms which are not very big
(`x = 3.5 m, `y = 2.2 m, `z = 2.8 m). Since the structure is lightweight, a lot of finite
elements are necessary in order to describe the bending waves. This highly penalises
the coupling modal matrix.
In both situations, we can see that the more expensive part in the FEM ap-
proach are the acoustic matrices and in the Modal-FEM approach the coupling ma-
trix. Acoustic or structural matrices are a very basic part of the problem. On the
contrary, the coupling matrices can be considered as a ‘negotiable’ cost. They are,
of course, also important but their main function is to transfer information from one
sub-problem to another, and this can be done in different ways. In a chained approach
it would be enough to read and write data from files (especially if different software
is used for the acoustic and structural parts). However, as discussed in Chapter 4,
one or three coupling matrices have to be stored if a block Gauss-Seidel procedure is
used or the problem has to be solved by means of a monolithic solver.
Depending on the bandwidth ∆f considered for the modal basis the use of this
hybrid approach can be more or less memory-demanding than a pure FEM approach.
For heavy structures, the modal method is less memory-demanding than FEM but the
situation can even be reversed when the bending waves in the structure are shorter.

110 Combined modal-FEM approach for vibroacoustics
0.01
0.1
1
10
100
1000
10000
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
Mby
tes
f (Hz)
Acoustic Modal ∆f = 100 Hz Acoustic FEM (Sparse) Shell FEM (Sparse)
Coupling Modal-FEM (Full) Coupling FEM-FEM (Sparse)
(a)
0.01
0.1
1
10
100
1000
10000
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
Mby
tes
f (Hz)
FEM-FEM Sparse Modal-FEM ∆f = 25 Hz
Modal-FEM ∆f = 100 Hz Modal-FEM ∆f = 300 Hz
(b)
Figure 5.1: Memory requirements for the problem of sound transmission through a0.1 m thick concrete single leave: (a) for each type of matrix, with ∆f = 100 Hz forthe modal approach; (b) for the complete problem, with various ∆f for the modalapproach.
Even if memory expenses can be reduced when modal bases are employed, the
most important advantage of using analytical modal basis for acoustic domains is
found in the required calculation times. In Table 5.2 the most expensive operations
related with acoustic domains are summarised (again, weak coupling is assumed).
Operation FEM Sparse Modal-FEMCreate Matrices Summation of matrices Calculation of nmod coefficientsSolve Acoustic Domain Solve an Solve a diagonal
indefinite system systemAcoustic info ↔ Structure Matrix × vector Matrix × vector
Table 5.2: Main algebraic operations related with acoustic domains.
The reason why modal methods are faster than FEM is the type of system of
equations to be solved. While in FEM we have to deal with indefinite systems, using
modal analysis we only have to solve a diagonal system. In the first situation a solver
like MINRES or GMRES (Saad (2000) and Barrett et al. (1994)) is required while

5.3 Analysis of computational costs 111
0.01
0.1
1
10
100
1000
10000
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
Mby
tes
f (Hz)
Acoustic Modal ∆f = 100 Hz Acoustic FEM (Sparse) Shell FEM (Sparse)
Coupling Modal-FEM (Full) Coupling FEM-FEM (Sparse)
(a)
0.01
0.1
1
10
100
1000
10000
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
Mby
tes
f (Hz)
FEM-FEM Sparse Modal-FEM ∆f = 25 Hz
Modal-FEM ∆f = 100 Hz Modal-FEM ∆f = 300 Hz
(b)
Figure 5.2: Memory requirements for the problem of sound transmission through a0.013 m thick plasterboard single leave: (a) for each type of matrix, with ∆f = 100Hz for the modal approach; (b) for the complete problem, with various ∆f for themodal approach.
the cost of solving the second system of equations is negligible.
Besides memory requirement and computation times there are other aspects to
be emphasised. Post-processing is an important part of vibroacoustic problems. In
a pure FEM approach, the root mean square pressure at nodes is directly obtained
since the nodal variable is the pressure phasor: prms = |p|/√
2. Afterward some
type of spatial average can be done. On the contrary, when the pressure field of the
acoustic domain is expressed by means of a modal basis, the acoustic unknowns are
the modal contributions a. Pressures can be obtained after a modal combination.
This operation is repetitive (it has to be done for a quite large number of points
in the acoustic domain and for every discrete frequency) and time consuming. It
is very convenient to optimise this part of the process. An easy way to do it is to
pre-evaluate the eigenfunctions in the points that are going to be used for the spatial
average. These values can be stored in a matrix that will be used each time to obtain

112 Combined modal-FEM approach for vibroacoustics
punctual values of pressure from modal contributions an that has only to be created
once at the beginning (before the frequency loop).
5.4 One-dimensional examples and sources of error
The one-dimensional vibroacoustic problems presented in Chapter 3 have been solved
here using in vacuo modal basis for the acoustic domains. The solution for the case
of a single mass have been plotted in Fig. 5.3. The frequency bandwidth used to
truncate the modal basis in each domain is ∆f = 50 Hz. This small value has been
chosen in order to highlight differences between modal and analytical solutions.
-4
-2
0
2
4
0 0.5 1 1.5 2 2.5 3
p <
N/m
2 >
x (m)
Re(pana)Re(pmod)
Im(pana)Im(pmod)
(a)
-0.004
-0.002
0
0.002
0.004
3 3.5 4 4.5 5 5.5 6 6.5 7
p <
N/m
2 >
x (m)
Re(pana)Re(pmod)
Im(pana)Im(pmod)
(b)
Figure 5.3: Comparison between an analytical solution and a modal solution in aone-dimensional vibroacoustic problem (sound transmission through a single mass):(a) sending domain; (b) receiving domain. The lengths of the acoustic domains are`x1 = 3 m, `x2 = 4 m. The single mass is like a 0.1 m thick concrete single wall. Theexcitation frequency is 270 Hz.
Errors in the modal solution can be classified as follows:
• Lack of normal velocity at vibrating contours (imposed velocity and inter-
faces with vibrating structures). Solutions are really bad around these bound-
aries because in vacuo eigenfunctions have no normal velocity at contours and it

5.4 One-dimensional examples and sources of error 113
is not possible to exactly reproduce the analytical solution that does not belong
to the space generated by the eigenfunctions. However, this type of error is
very local. Its influence is concentrated in half a wave length from the contour
(Fig. 5.3(a)). This error zone is reduced if more eigenfunctions are included in
the basis.
• Lack of normal velocity at absorbing contours. Caused by the same
reasons than the previous error but the consequences are not only localised in
the boundaries of the acoustic domain. The wave tends to be shifted (phase
error) all around the acoustic domain. Fig. 5.3 does not show the effect of
absorption because it is an undamped situation.
• Difficulties to reproduce pressure fields around punctual sound sources.
Typical solutions of an acoustic field with a sound source exhibit large values of
pressure gradient around the source. The geometric attenuation of this pressure
is also important and in the other zones of the acoustic domain the pressure
field tends to be similar to the modal shapes. A Dirac delta requires modal con-
tributions from the whole frequency spectrum (0,+∞). With a base composed
of modes concentrated in a relatively narrow frequency bandwidth, the pressure
field in the surroundings of the source cannot be correctly approximated. The
approximation is better in the other zones of the domain. In order to reduce
this local error, the number of eigenfunctions used to interpolate the pressure
field should be increased. Information of all the spectrum is required. However,
this zone is small and its effect on the spatial averages is very limited.
The first and second error types are caused by the use of the in vacuo modal basis
in a vibroacoustic problem instead of the modal basis obtained from a coupled (fluid-
structure) eigenvalue problem. This latter option leads to a quadratic eigenvalue
problem that is difficult to solve.
The current approach has to be understood as a ‘cheap’ and fast option to obtain
good approximations of the pressure fields in the acoustic domains. The evolution of
the modal density with frequency in the rooms and the location of particular modes

114 Combined modal-FEM approach for vibroacoustics
are correctly described. Moreover, the effect of localised errors of the pressure field
over the structures are less important if frequency averages are considered. The exact
and modal mean forces on the structure are then very similar.
5.5 Role of acoustic absorption and the size of the
modal basis
Three different aspects of the model are analysed here. They are important in order
to perform an accurate modelling but they are also related with the computational
efficiency. First, the capacity to introduce the adequate amount of acoustic absorption
is analysed. Second, the influence of the frequency bandwidth ∆f considered in order
to define the basis is analysed. It is very important from a computational point of
view. Finally, the parameters that vary for each eigenfunction for a given frequency
of excitation have been analysed. It is important in order to have some quantitative
justification of the use of a truncated modal basis (justify the chosen values of ∆f).
5.5.1 Acoustic absorption
The most usual way to measure the sound reduction index R (defined in Section 3.2.3)
of a wall placed between two rooms in the laboratory is by means of the pressure
method:
R = L1 − L2 + 10 log10
(S
Areceiving
)(5.15)
L1 and L2 are the mean sound pressure levels in the sending and receiving rooms, S
is the surface of the tested wall, and Areceiving the absorption in the receiving room.
It is usually calculated by means of the reverberation time of the room (Areceiving '0.16V/RT60, V is the volume of the room and RT60 its reverberation time).
In models where the acoustic domains are supposed to be unbounded (i.e. Brun-
skog and Davidsson (2004), Guigou and Villot (2003)), the correction due to the
absorption in acoustic boundaries is not necessary. The sound reduction index is
calculated by means of the intensity method, see Hongisto (2000). It is the more

5.5 Role of acoustic absorption and the size of the modal basis 115
natural way to do it since incident, reflected and transmitted acoustic waves can be
distinguished.
Here, a locally reacting admittance value (A = vnnn/p) is used at boundaries. A
value of absorption α can be calculated for each admittance by means of theoretical
formulas (Pierce (1981), Bell and Bell (1993)). The absorption of the receiving room
can then be expressed as Areceiving =∑
i Siαi, where Si is the surface of each Robin
boundary and αi its absorption coefficient.
Eq. (5.15) assumes that the pressure field is diffuse in each room. The incident
intensity is then expressed as
Iinc =< p2
rms >
4ρ0c(5.16)
where prms is the root mean square pressure and < • > means spatial averaged inside
the room.
Some acoustic (not vibroacoustic, structures are not considered) problems have
been solved in order to verify if the proposed model can reproduce these hypotheses
(diffuse pressure field and correct amount of acoustic absorption introduced in the
acoustic domains). If the absorbed acoustic energy in the room is known, the mean
absorption coefficient of the boundaries can be expressed as
α =SRobinIabsSRobinIinc
=Pabs
Pinc
(5.17)
Pabs and Pinc are the total absorbed and incident acoustic powers. As shown in
Section 5.4, the obtained pressure field is, at least in a broad part of the room, an
acceptable approximation of the exact solution. Unfortunately, it would be incorrect
to calculate local outputs at boundaries. A large error is made in the calculation of
acoustic intensities at the contours of the room. This is a drawback of the presented
model, caused again by the lack of normal velocity at contour of the modal basis. The
same thing can be said in the nearest surroundings of the sound source. However, the
acoustic intensity can be quite correctly calculated in an intermediate region between
the source and the boundaries.

116 Combined modal-FEM approach for vibroacoustics
Using a closed surface that includes the punctual source, the outgoing power flow
can be calculated as
P =
∮III ·nnn dS with III =
1
2Re pvvv (5.18)
where III is the time average of the acoustic intensity III. p is the pressure phasor and
can be directly obtained using the modal basis and vvv is the acoustic velocity phasor
(when the control surface is a sphere, vr = vvv · nnn is the radial velocity). The acoustic
velocity can be obtained by means of numerical differentiation of the pressure field.
The differentiation procedure must be adapted to the acoustic wave length.
While in wave-based models incident, absorbed and reflected waves can be dis-
tinguished in a natural way, in the models considering bounded domains this is not
possible. All variables (in particular, the pressure phasor) are global variables. This
means that the calculated acoustic power is the net acoustic power flow. For the case
of the single room, acoustic energy is destroyed only in Robin boundaries. It means
that the calculated power is equal to the absorbed power, P = Pabs. The averaged ab-
sorption coefficient α can be calculated using Eqs. (5.16) and (5.17) and the calculated
value of absorbed power Pabs.
The averaged absorption coefficient has been calculated using the described pro-
cedure in different rooms with a punctual sound source. The dimension of the rooms
are: `x = 2.5 m, `y = 2.2 m, `z = 2.8 m and `x = 6.35 m, `y = 4.2 m, `z = 3 m.
The punctual sound source is placed in a corner of the room and separated 0.5 m
from each contour. Different values of admittance have been used. They are listed
in Table 5.3. Three different configurations of the absorbing boundaries have been
considered:
1. All the walls of the room are absorbing boundaries and acoustic energy can be
absorbed. The same admittance is used for all of them.
2. All the walls of the room except one of them (its surface is `y×`z) are absorbing
boundaries. This situation is like in the receiving room of a sound reduction
index test.

5.5 Role of acoustic absorption and the size of the modal basis 117
3. Only one of the walls (its surface is `y × `z) is considered to be a absorbing
boundary. Less acoustic energy is absorbed in that case.
α(%) Z/ρac Z (Ns/m3) A (m3/Ns)
5 78.4 3.1454 · 104 3.1792 · 10−5
10.098 38 1.52456 · 104 6.55927 · 10−5
20.353 18.0 7.2216 · 103 1.38473 · 10−4
30.306 11.5 4.6138 · 103 2.16741 · 10−4
50.136 6.17 2.4754 · 103 4.03974 · 10−4
86.263 2 + 0.8i 8.024 · 102 + 3.2096 · 102i 1.07436 · 10−3 − 4.29745 · 10−4i
97.817 1.5 + 0.2i 6.018 · 102 + 80.24i 1.63266 · 10−3 − 2.17688 · 10−4i
Table 5.3: Values of admittance used. The absorption coefficient α is calculated bysimplified expressions.
In Fig. 5.4, the absorbed power and the averaged pressure level obtained for the
same room changing the admittance of the Robin boundaries have been plotted. The
numerical power flow has been compared with the theoretical expression of a monopole
radiating in an unbounded domain
P =2π|S|2ρ0c
with S =−iωρ0Qs
4π(5.19)
S is the monopole amplitude and Qs is the source strength amplitude. The variation
of the power flow due to room absorption is small. However, for cases with nearly non-
absorbent walls, the modal behaviour of the room can be seen. Values of radiated
power in finite acoustic domains are smaller than in an unbounded domain (α =
100 %). Differences in the mean pressure level of the room are more relevant. The
sound level in the room decreases for higher values of the absorption.
The difference between the prediction of the absorption using simplified expressions
(see Pierce (1981) and Bell and Bell (1993)) and the value calculated by means of the
numerical model has been plotted in Fig. 5.5 (∆α = αnumerical − αsimplified). The
differences between the three different configurations of absorbing walls described
above are small and almost constant with frequency (especially for high frequencies).

118 Combined modal-FEM approach for vibroacoustics
1e-04
0.001
0.01
0.1
1
1000
800
630
500
400
315
250
200
160
125
100
Pow
er (
N•m
/s)
f (Hz)
exact, α = 100 %num. (α = 10 %)
num. (α = 30 %)
(a)
0.01
0.1
1
10
100
1000
800
630
500
400
315
250
200
160
125
100
<p r
ms2 >
f (Hz)
(α = 10 %)(α = 20 %)
(α = 30 %)(α = 50 %)
(b)
Figure 5.4: Punctual sound source inside a room. Effect of room absorption: (a)acoustic power flow; (b) averaged pressure level.
The largest differences are found at low frequencies. This is caused by the poor
modal density. It does not satisfy the hypothesis of a diffuse field and a uniform
distribution of incidence angles for the pressure waves. This uniformity in incidence
angles is assumed by the analytical formulations of the absorption coefficient.
The difference is larger for more absorbent rooms. The modal approach has better
performances for low absorption situations due to the type of basis employed.
For a given value of the admittance, the numerical absorption is, in general, larger
than the absorption predicted by simplified expressions. This difference has conse-
quences in the calculation of the sound reduction index by means of numerical methods
(if the simplified expressions of the absorption coefficient are used instead of the sys-
tematic calibration of the room absorption shown here). The correction term due to
acoustic absorption in the receiving room of Eq. (5.15) takes into account the averaged
absorption coefficient as −10 log10 (α). With the differences shown in Fig. 5.5, it can

5.5 Role of acoustic absorption and the size of the modal basis 119
-6-4-20246
800
630
500
400
315
250
200
160
125
100
∆α (
%)
f (Hz)
Expected absorption: 5 %
800
630
500
400
315
250
200
160
125
100
f (Hz)
Expected absorption: 10 %
-6-4-20246
∆α (
%)
Expected absorption: 20 %
Expected absorption: 30 %
Figure 5.5: Differences between the absorption coefficients ∆α = αnumerical−αsimplifiedobtained by means of the numerical model (punctual sound source in a room) or bysimplified expressions. The case 1 for the configuration of absorbing walls is plotted.Cases 2 and 3 are very similar. Note that they are signed absolute differences and notrelative differences.
be said that the differences in the pressure measurement of the sound reduction index
due to the absorption modelling are not larger than ±1 dB. The model will tend in
general to predict slightly higher values of sound reduction index.
5.5.2 Relationship of matrix bandwidth and the Robin bound-
ary condition
In Eq. (5.6), it can be seen that the bandwidth of matrix Mψ depends on the treatment
of Robin boundaries. If there are no Robin boundaries, the matrix is diagonal and if all
the eigenfunctions are considered in Robin integrals, the matrix is full. Nevertheless
the main advantage of using this model is the fast resolution of acoustic domains (with
diagonal matrix).
In Fig. 5.6 the influence of the bandwidth is shown. The Kundt’s tube has been
solved using modal analysis for different bandwidths of the acoustic matrix. The
modal solution has been compared with the available analytical solution and the

120 Combined modal-FEM approach for vibroacoustics
relative error in the mean pressure level of the acoustic domain calculated. The value
of absorption used for the example is high (A = 4.03974 · 10−4 m3/Ns, α = 50 %).
The errors in the modal approach are larger for higher values of absorption, this is an
unfavourable situation for the modal approach.
0
1
2
3
4
5
6
50 100 150 200 250
e<
Prm
s2 > %
f (Hz)
No Absorption BW = 0 (Diag.) Full BW = 5
Figure 5.6: Influence of the bandwidth of matrix Mψ (i.e. number of modes consideredto represent Robin boundary conditions). 4 m length Kundt tube with an admittanceA = 4.03974 · 10−4m3/Ns.
The eigenfunctions in the modal basis are ordered by eigenfrequency and not by
geometrical affinity at absorbing contours. A measure of the affinity could be
∫ΓRψi(xxx)ψj(xxx)dΓ∫
ΓRψi(xxx)dΓ
∫ΓRψj(xxx)dΓ
(5.20)
This information cannot be known a priori with a reasonable cost. In addition, the
ordering of the eigenfunctions in that way would only be interesting for this part
of the problem (frequency ordering is more important in order to choose significant
eigenfunctions, Section 5.5.3). This means that considering a matrix bandwidth is a
random process, in the sense that the off-diagonal terms are chosen with no physical
criterion. In the results shown in Fig. 5.6 four different situations are considered: i)
diagonal matrix Mψ where absorption is not modelled (‘No absorption’); ii) diagonal
matrix Mψ where the absorption is considered by means of the diagonal coefficients
(bandwidth = 0, this is the option used in the three-dimensional calculations); iii)
all the off-diagonal terms have been taken into account (‘full’); iv) an intermediate

5.5 Role of acoustic absorption and the size of the modal basis 121
situation with matrix bandwidth = 5.
In the case i), the modal solution is very bad but the error is concentrated around
eigenfrequencies. This shows that the main role of acoustic absorption is to attenuate
the resonant responses. In the case ii), the error is almost constant and bounded
within an acceptable range (below 4 %). It has been the option used in the model
implementation. The other options studied reduce the error between eigenfrequencies
but the improvement is not clear at resonances (even for the case of full matrix).
5.5.3 Influence of frequency bandwidth
As shown in Section 5.3, the number of modes used to interpolate the pressure field is
an important parameter. It controls the computational efficiency of the method and
also the quality of the obtained solution. The modal basis is defined with the modes
whose eigenfrequency belongs to a given bandwidth ∆f .
The most relevant modal contributions are found around the excitation frequency.
Modes falling outside a reasonable frequency bandwidth (in this case ±200 Hz) have
a poor modal contribution.
The influence of the frequency bandwidth in the solution of a one-dimensional
sound transmission problem can be seen in Fig. 5.7. The relative error between the
analytical solution and the modal solution is plotted. The chosen outputs are the
averaged root mean square pressure in sending and receiving domains. The error is
reduced when the bandwidth is increased. The improvement is more important in the
sending domain.
5.5.4 Selection of acoustic modes
Two different mechanisms of sound transmission have been historically distinguished:
resonant transmission and forced transmission. In the first case vibrations in the
structure are mainly caused by direct excitation of modes whose eigenfrequency is
close to the analysed frequency (resonant modes). This kind of vibration is only found
in structures of finite size. In the second mechanism, the structure vibrates in order

122 Combined modal-FEM approach for vibroacoustics
1e-04
0.001
0.01
0.1
1
10
500
400
315
250
200
160
125
100
e <P
rms2 >
%
f (Hz)
∆f = 10 Hz∆f = 100 Hz
∆f = 1000 Hz
(a)
1e-04
0.001
0.01
0.1
1
10
500
400
315
250
200
160
125
100
e <P
rms2 >
%
f (Hz)
∆f = 10 Hz∆f = 100 Hz
∆f = 1000 Hz
(b)
Figure 5.7: Error in the outputs of a one-dimensional vibroacoustic problem, de-pending on the frequency-bandwidth employed to define the modal basis: (a) sendingacoustic domain; (b) receiving acoustic domain.
to be geometrically coincident with the incident acoustic pressure field. Thus, the
vibration shapes can be different from resonant modes. This phenomenological way
of understanding the problem of sound transmission has been especially used in order
to simplify analytical models and deal with these two paths of sound transmission
separately.
The proposed model provides a global description of the physical variables without
making differences between sound transmission paths. However, these two mecha-
nisms can also be identified in Eqs. (5.6), (5.10) and (5.11). The forced transmission
or geometrical coincidence between pressure (in the acoustic part) and displacement
waves (in the structural part) modifies the value of the force vector in Eq. (5.10).
The force vector depends on the shape of the vibration field and how is it coupled
with the matrix Lmod in Eq. (5.11). The greater the coincidence, the larger the force
term. The resonance of the acoustic domains depends on the diagonal coefficients of
the matrix Mψ in Eq. (5.6). For small diagonal coefficients the modal contribution aj
is larger.

5.5 Role of acoustic absorption and the size of the modal basis 123
This physical interpretation of the phenomenon provides criteria to decide how to
truncate the modal basis. In Gagliardini et al. (1991) a nice discussion on how to
choose acoustic and plate modes is done (the model presented there is analytical and
finite elements are not used for the structure). It is illustrated by Fig. 5.8 for the
cases of a frequency f1 below the coincidence frequency fc and a frequency f2 above
the coincidence frequency. In both situations, the resonant R modes of the acoustic
domains and the structure are excited. The pressure waves can generate vibrations
on the structure at non-resonant frequencies due to geometric coincidence Fa→s and
the displacement waves can generate sound by geometrically coincidence with acous-
tic modes Fs→a. Non-resonant transmissions Fa→s and Fs→a can be important below
and around the critical frequency, but for higher frequencies the possibility of forced
transmission diminishes due to the large values of the frequency gaps |f2a − f2| and
|f2s − f2|. Geometry coincidence takes place in the contact surface. Thus, a displace-
ment field can be coincident with more than one acoustic mode because the vibration
field of the structure is only in contact with the pressure field in some face of the
acoustic mode.
k
ffc
kc
f1
Ra
Rs
f1a
Fs --> a
f1s
Fa --> s
f2
Rs
Ra
f2a
Fs --> a
f2s
Fa --> s
kbending kair
Figure 5.8: Selection of acoustic modes. Conceptual plot with the mechanisms ofsound transmission depending on the excitation frequency and the wave numbers inthe acoustic domains and the structure. R means resonance excitation and F forcedexcitation (geometrical coincidence between structural and acoustic modes), ‘a’ meansair and ‘s’ structure.
In the proposed modal-FEM approach, only the acoustic modes have to be chosen.

124 Combined modal-FEM approach for vibroacoustics
0
5
10
15
20
0 50
100
150
200
250
300
350
400 e
%
∆f (Hz)
f = 200 Hz, <prms2>sending
f = 200 Hz, <prms2>receiving
f = 200 Hz, <urms2>
f = 654.8 Hz, <prms2>sending
f = 654.8 Hz, <prms2>receiving
f = 654.8 Hz, <urms2>
Figure 5.9: Convergence of the outputs of interest depending on the bandwidth con-sidered in the definition of the modal basis. Relative error by comparison with areference value (modal basis with ∆f = 600 Hz).
l x2
l y1 l y2
l x1
Sending roomReceivingroomS
Figure 5.10: Sketch of a sound transmission problem between two rooms.
However, these considerations should be also taken into account to define meshing
criteria for the FEM part of the problem. The actual importance of both transmission
paths has been studied by means of the two-dimensional example of Fig. 5.10. Since it
is a two-dimensional problem, the geometrical coincidences can be exactly controlled.
In all the situations analysed the dimensions of rooms are `x1 = 4 m, `y1 = 3.5 m,
`x2 = 3 m, `y2 = 3.5 m, S = 3 m. The single wall, modelled with beam elements,
is simply supported with allowed rotations at the endings. With these dimensions it
is ensured that structural modes with 3 waves (n = 6) and acoustic modes with 6.5

5.5 Role of acoustic absorption and the size of the modal basis 125
waves in the vertical direction (ny = 7, nx = 0, 1, 2, . . .) are geometrically coincident.
Wall 1 Wall 2Meaning Symbol Value ValueYoung’s modulus E 4.8 · 109 N/m2 2.94 · 1010 N/m2
Solid density ρsolid 913 kg/m3 2500 kg/m3
Wall thickness t 0.03 m 0.1 mHysteretic damping coefficient η 3 % 3 %Critical frequency fc 926.54 Hz 371.51 Hz
Table 5.4: Material and geometrical properties of two single walls.
Two different single walls have been analysed (geometric and mechanical properties
in Table 5.4). In the first one (plasterboard) the eigenfrequency of the wall with
3 waves (n = 6) is 124.95 Hz. In the second one (concrete) this eigenfrequency
is 654.83 Hz. The first problem is solved for a frequency of 124.90 Hz (below the
critical frequency fc) in order to force the wall to have a vibration shape similar to
the eigenshape of mode n = 6. This structural vibration is geometrically coincident
in the coupling surface with the modes of the receiving room having n(2)y = 7 and
n(2)x = 0, 1, 2, 3, . . .. The eigenfrequencies for this family of modes are: 340.0, 344.7,
358.4, 380.1, 408.6, 442.6, 480.83, 522.44, 566.66, 612.9, 660.8, 710.0, . . . Hz. The
frequency chosen for the second wall is 654.80 Hz. It is also close to the eigenfrequency
of the wall n = 6. In Fig. 5.11, the modal contributions (frequency spectrum) of the
sending and receiving acoustic domains have been plotted. In all the situations, the
dominating part of the frequency spectrum is around the studied frequency (resonant
modes). However, in the first wall where this frequency is under the critical frequency,
we can distinguish around 340 Hz a group of modes generated by the forced path of
sound transmission.
Nevertheless, the contribution of these modes to the total pressure level in the
room is small. The same calculations have been performed with different modal
bases. They are created considering the eigenfunctions with eigenfrequency in the
band [f0 − ∆f, f0 + ∆f ]. f0 is the excitation frequency and ∆f is a variable param-
eter. It can be seen in Fig. 5.9 that variations are smaller for values of ∆f larger

126 Combined modal-FEM approach for vibroacoustics
0.001
0.01
0.1
1
800
630
500
400
315
250
200
160
125
100
80
63
|aj|
fj (Hz)
Sending roomf = 124.9 Hz, fc = 371.51 Hz
(a)
0.001
0.01
0.1
1
1000
800
630
500
400
315
250
200
160
125
100
80
63
|aj|
fj (Hz)
f = 654.8 Hz, fc = 926.54 Hz Sending room
(b)
0.001
0.01
0.1
1
800
630
500
400
315
250
200
160
125
100
80
63
|aj|
fj (Hz)
Receiving roomf = 124.9 Hz, fc = 371.51 Hz
Acoustic modes: ny = 7, nx = 0,1,2,...
(c)
1e-05
1e-04
0.001
0.01
1000
800
630
500
400
315
250
200
160
125
100
80
63
|aj|
fj (Hz)
Receiving roomf = 654.8 Hz, fc = 926.54 Hz
(d)
Figure 5.11: Modal contributions of two-dimensional acoustic domains in two differentsound transmission problems: (a) heavy single leave, sending room; (b) lightweightsingle leave, sending room; (c) heavy single leave, receiving room, the geometricallycoincident acoustic modes are indicated; (d) lightweight single leave, receiving room.

5.5 Role of acoustic absorption and the size of the modal basis 127
than 200 Hz. This means that only resonant modes are important because the modal
contribution of the modes with frequency that is very different from the excitation
frequency is small. A residual error (under 5 %) can never be eliminated. It is due
to the basis used. We know a priori that with a basis composed of eigenfunctions the
exact solution is never reached because it is a vibroacoustic problem and the acoustic
absorption is 10 %.
An study of the factors involved in the acoustic modal analysis has also been done
in order to find some additional guideline to determine the parameter ∆f (especially
for the case of geometrically coincident modes that are non resonant). The modal
contribution ai of an uncoupled acoustic domain that is only excited by means of an
structural vibration field can be expressed as
ai =−ρ0 ω
2
∫
Ω
ψi(xxx)ψi(xxx)dΩ
︸ ︷︷ ︸(Int1)
1
(k2 − k2i )
∫
ΓFS
ψi(xxx)unnndΓ
︸ ︷︷ ︸(Int2)
(5.21)
This expression can be obtained by simplification of Eq. (5.4). For a constant
frequency of excitation, the variable contributions to ai are the factors marked with
Int1, Int2 and 1/(k2 − k2
j
). Int1 has the same value for most of the modes.
The effect of resonance is included in the factor 1/(k2 − k2
j
), see Fig. 5.12(a).
It represents a factor 100 if a very resonant eigenfrequency is compared with an
eigenmode which differs 100 Hz from the excitation frequency.
The contribution of the geometrical coincidence is included in Int2. The value
of this integral depends on two characteristics of the pressure and vibration waves:
similarity of wave number and phase. The following numerical experiments have been
done in order to quantify the importance of each factor:
1. Pressure and displacement fields with the same wave number but a difference
in phase. It would be the case of the two-dimensional example presented before
if the vertical dimensions of the rooms were `y1 = `y2 = 3. It would never be
exact coincidence between both wave types due to the boundary conditions in

128 Combined modal-FEM approach for vibroacoustics
the structure. The parameter controlling this phenomenon is
∫ yb
yasin(kbendingy) sin(kay + ξπ
16)dy
yb − yawith ka = kbending (5.22)
kbending is the wave number of bending waves and ka the wave number over the
structure of acoustic waves. ξ controls the shifting of the pressure and velocity
waves.
2. Pressure and displacement fields having different wave length
∫ yb
yasin(kbendingy) sin(ξkay)dy
yb − yawith ka = kbending (5.23)
The variation of these two factors depending on the value of ξ (ξ = 0 implies
exact coincidence in Eq. (5.22) and ξ = 1 for the case of Eq. (5.23)) can be seen in
Fig. 5.12(b) and Fig. 5.12(c). Except for very particular situations the ratio between
geometrically coincident modes and the others is not larger than 10.
The parameter 1/(k2 − k2
j
)is more important than the two analysed integrals.
Thus, geometrically coincident modes are only important if they are close to the
problem frequency. According to the presented analysis, good results can be obtained
with ∆f = 200 Hz.
5.6 Validation example
The model has been used in order to calculate the sound reduction index of a single
plasterboard. The material properties are those of Table 5.4. The dimensions of the
sending and receiving rooms are: `x = 5.7 m, `y = 4.7 m, `z = 3.7 m (sending); and
`x = 6.35 m, `y = 5 m, `z = 4 m (receiving). The dimensions of the plasterboard are
`y = 4 m and `z = 3 m. The wall is supported. The acoustic absorption of the rooms
is 10 %.
Since the dimensions of the rooms are large, the modal behaviour is reduced to
the very low frequency range and comparisons with classical prediction formulas of

5.6 Validation example 129
1e-05
1e-04
0.001
0.01
0.1
1
10
100
1 10 100 1000
1/(k
(f)2 -
k(f
+∆f
)2 )
∆f (Hz)
f = 50 Hz f = 100 Hz f = 500 Hz f = 1000 Hz
(a)
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
1000 100 10
<(s
in(k
x)s
in(k
x +
ξ π
/16)
)>
f (Hz)
ξ = 0 ξ = 1 ξ = 2
ξ = 3 ξ = 4 ξ = 5
ξ = 6 ξ = 7
(b)
0 0.2 0.4 0.6 0.8
1 1.2 1.4 1.6
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
<si
n(k
x) s
in(ξ
k x
))>
f (Hz)
ξ = 1.0 ξ = 0.5 ξ = 0.1
(c)
Figure 5.12: Evolution of parameters controlling the modal contribution (line in-tegrals): (a) resonance parameter; (b) shifting of waves that have the same wavenumber; (c) coincidence of waves with different wave number.

130 Combined modal-FEM approach for vibroacoustics
sound transmission are quite adequate (more details can be found in Fahy (1989)
and Beranek and Ver (1992) as well as in Chapter 6). The critical frequency of the
plasterboard is 2138 Hz. The numerical model cannot be used in this frequency range.
Meaning Symbol ValueYoung’s modulus E 4.8 · 109 N/m2
Poisson’s ratio ν 0.2Solid density ρsolid 913 kg/m3
Wall thickness t 0.013 mHysteretic damping coefficient η 0.5 %
Table 5.5: Geometric and material properties of the plate.
Results are shown in Fig. 5.13. The pressure field in each room and the vibration
field of the structure have been plotted in Fig. 5.14 for a frequency of excitation of 150
Hz. Four different numerical simulations have been included. Each of them has been
generated with a different scale factor of the laboratory: ξ = 0.3, 0.5, 0.7, and 1 (actual
size). The influence of modal behaviour is more important for higher frequencies if
the laboratory size is small.
0
5
10
15
20
25
30
35
40
630 500
400 315
250 200
160 125
100 80 63 50 40 31.5
25 20 16
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc)
ξ = 0.3 ξ = 0.5
ξ = 0.7 ξ = 1.0
Figure 5.13: Sound reduction index of a single plasterboard. Different dimensions ofthe same problem (ξ is the scale factor).
The slope of the curve is similar to the slope of the field incidence mass law,

5.7 Concluding remarks 131
which predicts too low values of isolation for the lower frequencies. In this zone, the
presented model provide higher values of sound reduction index. The low-frequency
laboratory measurements presented in Fausti et al. (1999) are also over the mass-law
predictions.
The mass law supposes infinite structures and unbounded acoustic domains while
the presented modal approach supposes finite rooms and bounded structures. Mass-
law expressions provide the same result independently of boundary conditions and
dimensions of the structure and rooms. Differences between theories assuming finite
and infinite structures has already been found in Takahashi (1995) and Kernen and
Hassan (2005). This can explain why numerical results are consistently over the mass
law predictions.
5.7 Concluding remarks
A model for sound transmission problems has been presented. The vibroacoustic
equations are solved by means of a hybrid approach. Finite elements are combined
with truncated modal basis of cuboid acoustic domains. The main differences with
existing similar models in the literature are the block organisation of the code in order
to deal with coupling with the block Gauss-Seidel strategy presented in Chapter 4,
and the extension of the model to situations different from a single or double wall. In
Chapter 8 it is used for flanking transmission problems.
The computational costs of the model have been analysed. Memory requirements
can be smaller than the cost of a FEM analysis. It depends on the type of problem
analysed and the adequate definition of the modal basis. The model is more efficient
(in terms of storage costs) for heavy walls with large rooms. On the contrary for
lightweight walls between small rooms the improvement with respect to FEM is small.
The critical parameter for efficiency is to choose the adequate bandwidth in which
the modal basis is defined. In any case the computation times are largely reduced
since in the acoustic part of the problem only a diagonal system of equations has to
be solved.

132 Combined modal-FEM approach for vibroacoustics
Figure 5.14: Sound reduction index of a single plasterboard. Sound pressure levelin the rooms of the laboratory in dB and velocity field over the tested plasterboardv2rms(m
2/s2). Scale factor of the plot 0.5 and frequency, 150 Hz.
The obtained solutions have localised errors (around vibrating surfaces, absorbing
surfaces or sound sources). They are mainly caused by the lack of normal velocity of
the eigenfunctions at boundaries and the finite number of eigenfunctions considered
in the modal basis. Their effect on the averaged outputs is not important.
The modelling of the absorption done by means of the presented model has been
compared with the predicted values obtained with simplified formulations. Differences
are large for low frequencies but the (∆α) is not larger than 2 % above 300 Hz (for
α = 10 − 20 %).

5.7 Concluding remarks 133
The importance of the bandwidth considered in the definition of the modal basis
has also been analysed. This has been done by direct observation of the variation
of the outputs (sound levels and sound reduction index) or by means of an analysis
of several critical parameters. In both cases the conclusion is that with values of
∆f = 200 Hz, acceptable solutions are obtained.
The predictions of sound reduction index of a plasterboard obtained by means of
the modal-FEM model have been compared with the results obtained by means of
the field incidence mass law. The slope of both R− f curves is almost the same. The
values of R obtained by the model are slightly higher than the values provided by
the field incidence mass law. The approximation in the modelling of the absorption
can cause a difference of 1 dB. The finite dimensions of the wall and the damping
can explain the other differences. Note that the field incidence mass law provides the
same results for walls having different dimensions and damping. More comparisons
will be done in Chapter 6.


Chapter 6
Numerical modelling of sound
transmission in single and double
walls
6.1 Introduction
Predicting the acoustic isolation capacity of room partitions is of great interest in order
to perform correct acoustic designs of buildings. The influence on the sound isolation
of the wall properties (materials, dimensions, construction type) and environmental
parameters (like room and wall dimensions or room absorption) has been studied
here. The model presented in Chapter 5 has been used for the prediction of sound
transmission through single and double walls. Two-dimensional and three-dimensional
versions of the model have been considered.
In Section 6.2 a literature review of basic formulations for the prediction of the
sound reduction index of single and double walls is done. The situations analysed are
described in Section 6.3. The results are divided in three parts. In the first one, in
Section 6.4, the low-frequency response illustrates the type of output obtained from
a numerical model and the effect of each parameter in the sound level difference.
Afterwards, in Section 6.5, the influence of some aspects more related with the envi-
135

136 Numerical modelling of sound transmission in single and double walls
ronment of the wall like the size of rooms or the sound source position is discussed. In
Section 6.6 attention is focused on some particular aspects related with double walls
like the effect of absorbing material or the role of steel connections. The concluding
remarks of Section 6.7 close the chapter.
6.2 Literature review
The airborne sound isolation of walls is quantified by means of the sound reduction
index
R = 10 log10
(1
τ
)= 10 log10
(IinIout
)(6.1)
which is a measure of the ratio between incoming (Iin) and transmitted (Iout) inten-
sities. These intensities are caused by incoming and outgoing pressure waves, pin and
pout. τ is the transmission coefficient. The sound reduction index is a parameter char-
acterising only the isolated wall. Only three different waves are considered: incoming
and reflected (sending side), and transmitted (receiving side). This ideal situation is
only found in unbounded acoustic domains.
pout
p− p+
pout
pin
pin
θ
Figure 6.1: Sketch with the incoming (and reflected) pressure wave pin and the pres-sure wave generated by the radiation of the wall pout. The pressure fields in thereceiving side p− and sending side p+ are generated by the combination of thesewaves.
As explained in Section 1.1, different techniques have been considered in the pre-
diction of sound transmission. Among them, useful analytical solutions of the sound
transmission through a single wall can be found in Fahy (1989), Josse (1975) or Be-

6.2 Literature review 137
ranek and Ver (1992). Thesa analytical expressions can be obtained because the
unbounded situation is assumed (the wall and the rooms on each side are infinite).
Otherwise it is very difficult to find analytical solutions of the sound transmission
problem. The sound reduction index can be calculated by means of mass-law type
expressions like
R = 10 log10
(∣∣∣∣1 +Z cos θ
2ρ0c
∣∣∣∣2)
(6.2)
where ρ0 is the air density, c is the speed of sound in air, θ is the angle of incidence of
acoustic waves (θ = 0 for normal incidence) and Zw is the wall impedance defined as
Zw =p− − p+
vnnn(6.3)
vnnn is the phasor of normal wall velocity. p+ is the complex amplitude (phasor) of the
sound pressure wave on the receiving side. It is fully caused by the radiation of the wall
that generates an outgoing wave pout. p− = 2pin−pout is the complex amplitude of the
pressure wave on the source-side of the wall. This is caused by blocked pressure field
and the pressure wave radiated by the wall into the sending domain. The blocked
pressure field is composed by the incoming wave (pin) and its reflected wave on a
perfectly rigid boundary, see Fig. 6.1. Zw usually deals with mass, bending and shear
effects. The mass law is obtained when the impedance only includes mass effects,
Zw = iρsurfω (ρsurf is the surface density of the wall). Attenuation in the structure
can be introduced by means of hysteretic damping, where the Young’s modulus of
the material is E∗ = E (1 + ηi). η is the damping coefficient. More details on the
modelling of damping can be found in Nashif et al. (1985).
An expression of the transmission coefficient of a single wall including mass and
stiffness effects is (see for example Beranek and Ver (1992))
1
τ (θ)=
[1 + η
(ωρsurf cos θ
2ρ0c
)(ω2B sin4 θ
c4ρsurf
)]2
+
[(ωρsurf cos θ
2ρ0c
)(1 − ω2B sin4 θ
c4ρsurf
)]2
(6.4)
where ω = 2πf is the pulsation of the problem and B the bending stiffness per unit

138 Numerical modelling of sound transmission in single and double walls
width. Eq. (6.4) has to be averaged. This technique was used in London (1950) and
Mulholland et al. (1967) and reproduces the effect of a reverberant pressure field. It is
done by considering multiple incoming waves from all the directions (in the wall plane)
and having incidence angles θ between 0 (normal incident waves) and θlim (oblique
incidence). θlim is a value varying from 70 to 85. This angle is measured in planes
that are orthogonal to the wall plane. The following equation is obtained after the
double average (more details can be found in Pierce (1981))
τav =
∫ θlim
0τ (θ) cos θ sin θdθ
∫ θlim
0cos θ sin θ dθ
(6.5)
The theoretical sound reduction index curve for a single wall can be split in three
zones, see Fig. 6.2(a): low frequencies, coincidence frequency and high frequencies.
The smallest values of sound reduction index are found at low frequencies. The re-
sponse can be modal dependent or mass controlled. In the modal zone, there are large
variations of sound reduction index caused by the resonances. The values can even
be negative for certain frequencies. Between the modal zone and the coincidence fre-
quency, the increase of isolation is around 6 dB per octave. The pressure waves make
the vibration shape of the wall to be similar to the pressure field in the surroundings.
This causes forced sound transmission. Sound reduction index can then be predicted
by the random incidence mass law
Rrandom = R (θ = 0) − 10 log10(0.23R (θ = 0)) (6.6)
R (θ = 0) is the normal incidence mass law, obtained by considering only mass effects
and orthogonal incoming pressure waves in Eq. (6.2). Eq. (6.6) is the result of the
average proposed in Eq. (6.5) with θlim = π/2 using an expression of τ that takes only
into account the mass effects. Discrepancies with laboratory measurements are found
and a new expression is proposed, the field incidence mass law
Rfield = R (θ = 0) − 5 (6.7)

6.2 Literature review 139
which can be obtained in the same way as Eq. (6.6) but using θlim = 4π/9.
An important drop of the sound reduction index is found around the coincidence
frequency. It is caused by the geometrical matching between the shape of pressure and
bending waves. For frequencies below the coincidence, the length of bending waves is
smaller than the length of pressure waves. Expressions (6.6) and (6.7) cannot predict
the dip because stiffness effects are not considered. For the case of a beam (single
wall of a two-dimensional problem) the coincidence frequency is
fc =c2
2π
√ρsolidA
EI(6.8)
where I is the inertia, A is the cross section area and ρsolid is the volumetric density of
the wall. If unbounded domains are considered, an exact coincidence between waves
can always be found. However, if models considering bounded domains are used (i.e.
the model presented in Chapter 5), it depends on the geometry of the problem and
the boundary conditions. In those cases, perfect coincidence is rarely found. Around
the critical frequency the response is controlled by the damping of the structure.
For frequencies over the critical frequency the sound reduction index can be pre-
dicted with the following formula proposed in Josse (1975)
R = 10 log10
(1 +
(ωρsurf2ρ0c
)2)
+ 10 log10
(f
fc
)− 10 log10
(1
η
)− 3 (dB) (6.9)
Similar expressions are found in Fahy (1989) and Schmitz et al. (1999). For high
frequencies the stiffness becomes the important parameter and the slope of the curve
increases. It can be around 18 dB per octave.
Numerical results presented in this chapter have been compared with some of these
analytical expressions. The notation used in the plots is ‘Field incidence’ for the case
of Eq. (6.7) and ‘Diff. field (f > fc)’ for the case where R is obtained using Eq. (6.9).
Similar models have been developed for the case of double walls. In Hongisto
(2006), seventeen models have been analysed. They cover a complete range of sit-
uations: double walls with and without absorbing material inside the cavity, with

140 Numerical modelling of sound transmission in single and double wallsR
(dB
)
fc (f)
Modal
log10
Coincidence
Mass contro
lled (6 dB/Octave)
(a)
Mod
al
R (dB
)
Coincidence
Mass−Air−Mass
Resonances
Mass contro
lled
(6 dB/Octave)
18 d
B/O
ctav
e
f m−a−m fc
12 d
B/Oct
ave
log10
(f)
(b)
Figure 6.2: Expected evolution of the sound reduction index with frequency for: (a)single walls; (b) double walls.
and without mechanical connections between leaves and considering or not averaged
incoming pressure waves. Only models that provide a set of analytical expressions in
order to evaluate the sound reduction index have been considered. Numerical-based
models or SEA models are not covered in the study. The conclusions of the paper
are not hopeful at all since differences larger than 20 dB between comparable models
and between models and experimental data have been found. Some other models of
double walls not appearing in the study are also interesting. In Kropp and Rebillard
(1999) and Wang et al. (2005) the possibility of considering mechanical devices con-
necting the two leaves of a double wall has been considered. In Brunskog (2005), the
influence of the mechanical path (stud) and the cavity path in the sound reduction
index of double walls have been studied. The dynamic equations have been simplified
due to the periodicity of structures. Afterwards they have been solved by means of
wave approach. The cavities between leaves have been described by means of a modal
basis expansion.
The expected evolution of sound reduction index with frequency has been plotted
in Fig. 6.2(b), according to the model for double walls proposed in Fahy (1989). In
spite of the discrepancies found in the analytical models for double walls, most of

6.3 Description of the problem analysed 141
them define the mass-air-mass resonance as
fm−a−m =1
2π
√√√√(ρ0c2
d
)(ρ
(1)solidt
(1) + ρ(2)solidt
(2)
ρ(1)solidt
(1)ρ(2)solidt
(2)
)(6.10)
where d is the separation between two leaves with volumetric densities ρ(1)solid, ρ
(2)solid
and thicknesses t(1), t(2). This resonance is the eigenfrequency of a system composed
by two masses (the two leaves of the double wall) separated by an air gap of length d
that acts as spring. For frequencies below the mass-air-mass resonance, the isolation
of the double wall is equivalent to the isolation provided by a single wall with the
same mass, R(ρ(1)solidt
(1) + ρ(2)solidt
(2)). For higher frequencies the isolation of a double
wall with an empty cavity can reach R(ρ(1)solidt
(1))+R(ρ(2)solidt
(2))+ 6 dB. This optimum
behaviour is altered by two resonance phenomena. On the one hand, the resonances
of the air in the cavity. Analytical formulations only take into account resonances in
the shortest direction of the cavity (thickness d). They are found at high frequencies
and can be attenuated if absorbing material is placed between leaves. On the other
hand the coincidence frequencies of each single leave. This effect is more important if
both leaves are equal.
6.3 Description of the problem analysed
The model problem considered here can be seen in Fig. 5.10. Sound is transmitted
through a single or double wall of finite dimensions. The wall separates two rooms.
Rooms 1 and 2 are the sending and receiving rooms respectively. Results presented in
Section 6.4 have been obtained using only finite elements in order to solve vibroacous-
tic equations. The results in other sections have been obtained with the combined
modal-FEM model presented in Chapter 5.
A punctual sound source is placed in the sending room. Its source-strength am-
plitude is Q = 4.2 · 10−2 m3/s (see Kinsler et al. (1990) for more details). Since the
problem is linear, this value is only important in order to guarantee a minimum value
of sound pressure level in the sending room. For the examples presented here, it is

142 Numerical modelling of sound transmission in single and double walls
always around 100 dB. The partition can be a single or a double wall. In the case of a
double wall the cavity between leaves is often full with absorbing material. The fluid
equivalent model proposed by Delany and Bazley (1970) is used.
Three different wall types have been considered: heavy single walls, lightweight
single walls and lightweight double walls, see Table 6.1. The heavy single wall is made
of concrete and the mechanical properties of the other structural elements are typical
of gypsum plasterboards. The dimensions for the sending and receiving rooms in the
single wall two-dimensional examples are l(1)x = 4 m, l
(1)y = 3 m, l
(2)x = 3.5 m, l
(2)y = 2.8
m; and for the double wall examples l(1)x = 6.35 m, l
(1)y = 4 m, l
(2)x = 5.7 m, l
(2)y = 3.7
m. In the three-dimensional problems analysed, the notation for the third dimension
will be lz.
Single walls Double walls
Meaning Symbol Heavy Lightweight Leave 1 Leave 2
Thickness t 0.05 m 0.02 m (2D) / 0.013 m 0.009 m
0.013 m (3D)
Young’s mod. E 2.943 · 1010 N/m2 4.5 · 109 N/m2 4.8 · 109 N/m2 3.8 · 109 N/m2
Density ρsolid 2500 kg/m3 900 kg/m3 913 kg/m3 806 kg/m3
Damping η 2 % 2 % 2 % 2 %
Length ` 2.5 m 2.5 m 3 m 3 m
Critical freq. fc 371.5 Hz 1425.1 Hz 2138.16 Hz 3261.38 Hz
Table 6.1: Geometrical and mechanical properties of the two single walls and theleaves of the double wall used in the examples.
All the boundaries of the acoustic domains that are not in contact with the struc-
ture are considered absorbing boundaries. The acoustic absorption of rooms is related
to the impedance Z of these boundaries (see for example Bell and Bell (1993))
αθ =Iabs−θIinc−θ
= 1 −
∣∣∣∣∣∣∣∣
Z
ρ0c cos θ− 1
Z
ρ0c cos θ+ 1
∣∣∣∣∣∣∣∣
2
(6.11)
The values of absorption used here are can be found in Table 6.2.

6.4 Low-frequency response 143
Z
ρ0c3 4 6 10 20 40 70
α 0.79 0.67 0.51 0.34 0.18 0.1 0.06
Table 6.2: Values of normalised impedance and averaged absorption for the Robinboundary condition.
6.4 Low-frequency response
Discussion in this section is focused on the low-frequency response. All the results
presented here have been obtained using only finite elements. They are presented
without averaging in frequency bands in order to preserve the detail. The study of
the low-frequency response is useful in order to understand the phenomena of sound
transmission in models considering bounded domains. A wave-based interpretation
does not lead to a correct understanding in this context (mainly due to the modal
behaviour). Low-frequency results also provide useful information in order to decide
the value of some parameters required by the numerical model (i.e. the number of
situations per Hz to be calculated). SEA, wave approaches, or phenomenological
models cannot be used to perform this kind of analysis.
Two different situations have been considered: sound transmission through a single
heavy wall and sound transmission through a double lightweight wall. The heavy
(rather than the lightweight) single wall is chosen in order to have a lower modal
density and to be able to differentiate the vibration modes.
In Fig. 6.3 the sound level difference between two rooms separated by the single
heavy wall has been plotted. Each curve has been obtained with a different value
of acoustic absorption in the rooms (see Table 6.2). The hysteretic damping of the
wall has been kept constant (η = 2 %). The eigenfrequencies of the undamped
vibroacoustic problem are also shown. It is not necessary here to consider the damped
eigenproblem that leads to a quadratic eigenvalue problem (Tisseur and Meerbergen
(2001)). This hypothesis is based in the results shown in Chapter 3, where the real
part of the eigenfrequencies of the damped and undamped eigenvalue analysis were
very similar. Only qualitative information is required here in order to understand the

144 Numerical modelling of sound transmission in single and double walls
sound level difference curve.
5 10 15 20 25 30 35 40 45 50 55 60
50 100 150 200 250 300
D (
dB)
f (Hz)
α = 0 % Z/(ρac) = 20, α = 18 %
Z/(ρac) = 10, α = 34 % Z/(ρac) = 4, α = 67 %
Eig. structure (bending) Eig. sending room
Eig. receiving room
Figure 6.3: Heavy single wall. Sound level difference for the low-frequency rangeshowing the modal behaviour.
The response of the system is modal-dependent. The system is weakly coupled, and
the value of the coupled eigenfrequencies is very similar to the values of the in vacuo
eigenfrequencies of each part: sending room, receiving room and wall. In Table 6.3,
the lower eigenfrequencies (except 0 Hz) of each part have been compared with the
eigenfrequencies obtained from the coupled analysis. This weak coupling is often found
in sound transmission problems and justifies simplifying assumptions. The coupled
and uncoupled eigenfrequencies are similar. However, the associated eigenfunctions
have different support. The modal shapes associated with an eigenfrequency of the
sending room have high values of pressure in this room but also in the receiving room,
as well as important displacements in the wall. Similar conclusions have been obtained
in Chapter 3 with the one-dimensional model.
Dips in the sound level difference are found around eigenfrequencies corresponding
to resonances in the receiving room or modes of vibration of the structure. The
sound level difference around these frequencies can even be negative as predicted in
Mulholland and Lyon (1973). Acoustic absorption attenuates the first type of dips
while the others are controlled by structural damping. The low values of D caused by
structural resonance remain unchanged here because the damping in the structure is
constant along this analysis. On the contrary, the dips caused by acoustic resonances

6.4 Low-frequency response 145
Wall Sending room Receiving roomuncoupled coupled uncoupled coupled uncoupled coupled
12.45 12.73 42.5 42.64 48.57 48.7349.82 49.28 56.67 56.83 60.71 60.89112.18 111.23 70.83 71.03 77.75 77.99
Table 6.3: Heavy single wall. Comparison between the eigenfrequencies of the coupledvibroacoustic problem and the eigenfrequencies of the isolated parts of the system.
are attenuated by acoustic absorption.
Acoustic absorption and structural damping are necessary in order to perform an
accurate physical modelling. Moreover, they are positive from a numerical point of
view since they can improve the efficiency of numerical solvers (see Chapter 4 and
Poblet-Puig and Rodrıguez-Ferran (2008)) and attenuate the oscillations of the sound
reduction index curve. This last aspect is very important in order to decide the
number of calculations to be done in every frequency band.
The oscillations are found between modes. It is necessary to perform some calcula-
tions between these modes in order to accurately reproduce the sound level difference
curve. The modal density grows with frequency (for the present case, two modes per
Hz are expected at 500 Hz, eight at 2000 Hz, and twelve at 3000 Hz), so the number of
calculations to be done should also grows with frequency. This is an important draw-
back because the cost of solving a single calculation also increases with frequency, as
shown in Chapter 5. However, looking at Fig. 6.4 we can affirm that this restrictive
reasoning is only completely true for undamped situations. Sound level difference
curves become smoother if attenuation is considered in the model. The number of
calculations per Hz can then be decreased. In the examples presented here, one fre-
quency per Hz has been analysed for frequencies below 500 Hz and 1.5 for frequencies
over 500 Hz.
A similar analysis has been done for the case of a lightweight double wall without
absorbing material in the cavity (0.175 m thick). The sound level difference curve
and the eigenfrequencies of the system are presented in Fig. 6.4. All the comments on
modal analysis as well as on acoustic absorption and structural damping done for the

146 Numerical modelling of sound transmission in single and double walls
-30
-20
-10
0
10
20
30
20 40 60 80 100 120 140 160
D (
dB)
f (Hz)
α = 0 % Z/(ρac) = 20, α = 18 % Z/(ρac) = 6, α = 51 %
Eig. leave 1 Eig. leave 2 Eig. sending room
Eig. receiving room Eig. cavity Coupled eig.
Figure 6.4: Lightweight double wall. Sound level difference for the low-frequencyrange showing the modal behaviour.
case of the single wall are still valid. Several phenomena increase the complexity of
the problem. On the one hand, new modes of vibration appear. The structural modes
can be caused by vibrations in both leaves and the air cavity between them can also
resonate. On the other hand, the system is not weakly coupled and new mode types
are found. These are mass-air-mass type resonances where the two leaves and the air
cavity inside have an important interaction. They cannot be related to any in vacuo
mode. The first of them is found at 83.70 Hz by means of a vibroacoustic eigenvalue
problem. The two leaves vibrate in their first mode. The value of the mass-air-mass
frequency predicted by Eq. (6.10) (66.22 Hz for this double wall) is obtained with a
numerical-based model if the eigenvalue analysis of a double wall with free leaves is
performed.
In Table 6.4 low frequency eigenvalues obtained in three different ways are shown:
i) complete eigenvalue analysis where the sending room, the receiving room and the
double wall with air cavity are considered at the same time (‘cou.’ in Table 6.4) ;
ii) uncoupled eigenfrequencies (‘unc.’ in Table 6.4); iii) analysis of only the double
wall (two leaves and air cavity) without considering the sending and receiving rooms
(‘DW’ in Table 6.4).
The agreement between the three analyses is quite correct except for the first
modes and the very coupled resonances. It can be seen that the modal behaviour

6.5 Acoustic isolation of single walls 147
of the double wall (even the very coupled eigenfrequencies) is correctly obtained in
case iii) where rooms are not considered. The first coupled mode is almost the same
in both modal analyses: 83.70 Hz for the complete case i) and 83.75 Hz for the
isolated situation iii). The modal density is high even for low frequencies due to room
dimensions and leave characteristics. The coupled modes are between a lot of another
modes.
Leave 1 Leave 2 Send. Room Recei. Room Cavity
cou. unc. DW cou. unc. DW cou. unc. cou. unc. cou. unc. DW2.9 1.5 1.32 5.34 3.94 2.99 27.4 26.77 30.37 29.82 57.89 56.67 61.65.63 6.01 5.53 7.73 8.86 7.8 42.68 42.5 46.22 45.95 110.51 113.33 117.4712.64 13.52 12.79 14.52 15.75 14.77 50.41 50.23 55.27 54.7822.92 24.53 23.22 23.2 24.62 23.51 52.68 53.54 61.37 59.65
Table 6.4: Comparison between the eigenfrequencies obtained by means of a vibroa-coustic eigenvalue problem (cou.), the eigenfrequencies of the isolated parts of thesystem (unc.) and the eigenfrequencies of the double wall (DW).
6.5 Acoustic isolation of single walls
The increase of modal density makes the analysis done in Section 6.4 impossible for
higher frequencies. In order to obtain useful engineering outputs, the numerical results
must be post-processed by means of space and frequency averages. From now on the
results will be presented averaged in third frequency bands. This is a clearer way to
understand the behaviour of a vibroacoustic system and obtain useful conclusions.
The discussion is focused here on environmental aspects, which are independent of
the wall type analysed. Thus, simple walls have been used in order to avoid additional
and unnecessary complications that could mask the relevant discussion of each section.
6.5.1 Influence of the absorption correction on R
The results in Section 6.4 have been presented in terms of the sound level difference
D. It is a global measure that not only contains information about the studied wall
but also about the test environment. D is the direct output obtained from a pressure

148 Numerical modelling of sound transmission in single and double walls
field measurement or from the models used here, but its value highly depends on the
acoustic absorption. On the contrary, the sound reduction index R defined in Eq. (6.1)
is a parameter that only depends on the wall.
Two main techniques are used in order to measure R in the field or the laboratory
(see Hongisto (2000) for more details and references). On the one hand, intensity
measurements which are laborious but provide interesting information on the spatial
distribution of sound transmission (i.e. leakages or sound bridges can be detected).
The required intensities cannot be easily obtained from the numerical results (it is
difficult to split the pressure field into incoming, reflected and radiated fields). On the
other hand, the more often used pressure measurements. The sound reduction index
is obtained indirectly by means of
R = L1 − L2︸ ︷︷ ︸D
+10 log10
(S
SRobinα
)(6.12)
where L1 and L2 are the mean sound pressure levels in the sending and receiving
rooms, S is the surface of the wall, SRobin the absorbing surface (the Robin boundary
in the numerical model) and α the averaged absorption coefficient. Eq. (6.12) is valid
for steady harmonic states where the acoustic power radiated by the wall is in dynamic
equilibrium with the absorption of acoustic energy by room contours (it is the case
of the used model). It has to be assumed that the incoming acoustic intensity on the
wall can be expressed as III ∝< p2rms > /ρ0c. prms is the root mean square pressure,
supposing that the acoustic field is reverberant. The assumption of reverberant field
in the numerical model is quite reasonable due to the frequency average.
In this section, the correction proposed in Eq. (6.12) in order to transform D into R
is used for the numerical results. D can be obtained post-processing the pressure fields.
The absorption α can be obtained by means of Eq. (6.11) using the impedances Z of
Robin boundaries. The expected result is that several sound level difference curves of
the same wall obtained with different values of acoustic absorption provide the same
sound reduction index curve. The equivalent situation in a laboratory would be to
modify the absorption of the receiving room (the reverberation time) and compare

6.5 Acoustic isolation of single walls 149
the sound reduction index measurements in each case.
Both two-dimensional (heavy single wall) and three-dimensional (heavy and lightweight
single walls) examples are shown. The dimensions for the two-dimensional rooms are
those listed in Section 6.3. For the three-dimensional rooms they are: l(1)x = 2.8 m,
l(1)y = 4 m, l
(1)z = 3 m, l
(2)x = 3.3 m, l
(2)y = 4 m, l
(2)z = 3 m (heavy single wall); and
l(1)x = 2.8 m, l
(1)y = 3 m, l
(1)z = 2.5 m, l
(2)x = 3.2 m, l
(2)y = 3 m, l
(2)z = 2.5 m (lightweight
wall). The thickness of the lightweight wall for the three-dimensional example is 0.013
m.
In Fig. 6.5 the sound level differenceD and the sound reduction index R for the case
of the two-dimensional heavy single wall have been plotted. The three-dimensional
results can be found in Fig. 6.6 (for the heavy wall) and in Fig. 6.7 (for the 0.013 m
thick lightweight wall).
In the two-dimensional analysis the differences between sound level difference
curves are large (around 15 dB). After the transformation to sound reduction index
by means of Eq. (6.12), the differences are reduced to 5 dB. At very low frequencies
and around coincidence frequency, the differences are larger.
Similar comments are valid for the three-dimensional examples. Differences in the
sound level difference curves are larger than for the two-dimensional case (they are
around 25 dB). After the calculation of R they are not larger than 5 dB. This is not
valid for cases with very large values of absorption (α > 50 %).
The absorption correction provided by Eq. (6.12) is quite satisfactory. Differences
between curves corresponding to values of absorption not larger than 50 % are smaller
than 5 dB. This is not true for very low frequencies where it would be better not to
use the correction and around the coincidence frequencies where differences in the R
curves are larger than in the other zones.
The same value of absorption α can be obtained with different values of impedance
Z. It has been checked that using these different values of impedance, equivalent sound
level difference curves are obtained. Thereby, sound reduction index curves are also
equal.
The values of R predicted by the numerical models are slightly higher than those

150 Numerical modelling of sound transmission in single and double walls
20
30
40
50
60
70
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
D (
dB)
f (Hz)
Field incidence, θlim = 4π/9 Diff. field (f > fc)
(a)
20
30
40
50
60
70
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Z/(ρac) = 3, α = 79 % Z/(ρac) = 4, α = 67 %
Z/(ρac) = 10, α = 34 % Z/(ρac) = 70, α = 6 %
(b)
Figure 6.5: Two-dimensional analysis of a heavy single wall: (a) sound level differenceD; (b) sound reduction index R.
predicted by mass-law type expressions. The agreement is better with the field inci-
dence mass-law, Eq. (6.7), than for the random incidence mass-law, Eq. (6.6). These
differences occur because the compared models are very different (i.e. finite vs. in-
finite). Differences are especially important for low frequencies where the mass law
cannot correctly reproduce the modal behaviour and underestimates the sound reduc-
tion index of the walls. The modal zone depends on the room dimensions but also on
the wall type. While for the three-dimensional heavy single wall case it is found for
frequencies under 450 Hz, for the case of lightweight single wall, modal behaviour is
only found under 80 Hz.
R is also underestimated in the coincidence frequency of the heavy single walls.
As justified in Section 6.2, pure coincidence will never be found in that case due to
the geometry and boundary conditions of the model.
In the following examples of the chapter, an acoustic absorption α = 18 % has

6.5 Acoustic isolation of single walls 151
been considered.
20
25
30
35
40
45
50
55
60
65
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25
D (
dB)
f (Hz)
Field incidence Diff. field (f > fc)
(a)
20
25
30
35
40
45
50
55
60
65
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25
R (
dB)
f (Hz)
α = 5 % α = 10 %
α = 30 % α = 50 %
(b)
Figure 6.6: Three-dimensional analysis of a heavy single wall. Influence of acousticabsorption: (a) sound level difference, D; (b) sound reduction index, R.
6.5.2 Comparison between two-dimensional and three-dimen-
sional models
In Section 6.5.1, results obtained with a two-dimensional or a three-dimensional ver-
sion of the model have been shown. The frequency range analysed with the two-
dimensional model is larger since the computational costs are smaller. The sound
reduction index of the heavy wall of Section 6.5.1 has been calculated now with the
three-dimensional version of the model. Different values of the third dimension lz
have been considered. The comparison has been plotted in Fig. 6.8.
Differences are not large between the two-dimensional and three-dimensional mod-
els. Two-dimensional predictions of R are slightly over the three-dimensional results.
The variations of R due to the increase of lz are not important.

152 Numerical modelling of sound transmission in single and double walls
5
10
15
20
25
30
35
40
45
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
D (
dB)
f (Hz)
Field incidence Diff. field (f > fc)
(a)
5
10
15
20
25
30
35
40
45
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
R (
dB)
f (Hz)
α = 5 % α = 10 %
α = 30 % α = 50 %
(b)
Figure 6.7: Three-dimensional analysis of a lightweight single wall. Influence of acous-tic absorption: (a) sound level difference, D; (b) Sound reduction index, R.
25
30
35
40
45
50
55
60
65
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) 2D lz = 2 m (3D) lz = 4 m (3D)
Figure 6.8: Sound reduction index of the heavy single wall. Comparison between thetwo-dimensional model and three-dimensional solutions with different problem widthlz.

6.5 Acoustic isolation of single walls 153
This analysis has been done in a problem where all the elements of the three-
dimensional model (geometry, boundary conditions, properties of the structure, the
excitation on the structure caused by a diffuse pressure field,...) can be obtained
by extrusion of the two-dimensional model. In general, three-dimensional problems
cannot be easily reduced to a two-dimensional situation (i.e. impact sound where
the excitation is a punctual force on a floor). On the one hand, modes can exist
in the third dimension. On the other hand, the modal density evolution with fre-
quency of a two-dimensional structure (shell in the three-dimensional problem) and a
one-dimensional structure (beam for the two-dimensional problem) is different. This
difference comes from the nature of the governing equations. For the former case the
modal density increases with frequency and for the latter it decreases. In any case,
for the presented situation, a two-dimensional model provides a good approximation
to the three-dimensional case. This means that two-dimensional models can provide
more than a qualitative description of a problem. In the present case a first approx-
imation to the numerical result is obtained. An important part of the models and
formulations for sound transmission found in the literature are two-dimensional and
have been used in three-dimensional problems.
6.5.3 Influence of room size
The room size can be a source of discrepancies between measurements of sound re-
duction index obtained in different laboratories and in field measurements. Here nine
different situations combining three different types of rooms have been analysed. The
dimensions of the rooms and their combination can be found in Table 6.5.
Receiving room Room sizeSmall Medium Big `x (m) `y (m)
Sendin
g
room Small 1 2 3 3 2.8Medium 4 5 6 5 4
Big 7 8 9 7 6
Table 6.5: Rooms employed in every case (cases 1 to 9) and room dimensions.

154 Numerical modelling of sound transmission in single and double walls
Some of the results are presented in Fig. 6.9. It is possible to see that differences
due to the room size are only important for low frequencies but not for mid and high
frequencies (especially for frequencies over the critical frequency of the wall). The
sound reduction index is more dependent on the size of the receiving room than on
the size of the sending room. As discussed in Sections 3.2.3 and 6.4 the dips in sound
reduction index are more influenced by the modes due to resonances in the receiving
room than modes due to resonances in the sending room.
20
25
30
35
40
45
50
55
60
65
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) Case 1
Case 4 Case 7
20
25
30
35
40
45
50
55
60
65
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) Case 3
Case 6 Case 9
Figure 6.9: Heavy single wall. Influence of room size in the sound reduction index:(a) small receiving room; (b) large.
6.5.4 Influence of sound source position
The influence of sound source position has been also studied. Results are presented
in Fig. 6.10. The source has been placed in two corners of the room (positions 1 and
4), in the centre (position 2) and just in front of the wall (position 3).
The differences in sound reduction index are important. The largest differences
are found in the low-frequency range. However, above the critical frequency they are

6.5 Acoustic isolation of single walls 155
also around 5 dB.
It justifies the usual practise done in laboratory measurements of sound reduction
index. The final result is the average between the measurements obtained for several
positions of the sound source in the sending room. It is more representative of a real
situation where the sound source (television, music device, industry machinery) can
be placed everywhere.
10
20
30
40
50
60
70
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) Position 1
Position 2 Position 3 Position 4
23
41
4 m
3 m
Figure 6.10: Heavy single wall. Influence of the sound source position.
6.5.5 Influence of window size
Sometimes the dimensions of the tested element are smaller than the laboratory wall
sizes, see for example Fig. 6.11. There also are laboratories that have a window in a
wall that separates two rooms. The tested element has to be placed there. In this
section, the effect of this window size on the sound reduction index has been checked.
The results presented here have been obtained with a three-dimensional model.
The dimensions of the rooms for the heavy and lightweight cases are l(1)x = 2.8 m,
l(1)y = 4 m, l
(1)z = 3 m, l
(2)x = 3.3 m, l
(2)y = 4 m, l
(2)z = 3 m. The dimensions of the wall
are βl(1)y m × βl
(1)z m. The same problem has been solved by changing the dimension
of the tested wall (window): β = 0.2, 0.4, 0.5, 0.6 and 0.8. Results are presented in
Fig. 6.12.

156 Numerical modelling of sound transmission in single and double walls
(a)
yl(2)
xl(2)
zl(2)
xl(1)
yl(1)
zl(1)
β yl(2)
β zl(2)
(b)
Figure 6.11: Influence of window size: (a) in the Acoustical and Mechanical Engi-neering Laboratory (UPC), the tested wall is placed in a window between two rooms.This is a double wall where the plasterboard has been removed and the absorbingmaterial can be seen; (b) sketch and notation for the numerical model.
20
30
40
50
60
70
80
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) β = 0.2
β = 0.5 β = 0.8
5
10
15
20
25
30
35
40
45
50
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) β = 0.2
β = 0.5 β = 0.8
Figure 6.12: Influence of the window size in the sound reduction index. Three-dimensional calculations: (a) heavy single wall; (b) lightweight single wall.

6.5 Acoustic isolation of single walls 157
The size of the tested wall has several effects in the sound reduction index curve.
For small walls the frequency range where the behaviour is modal is larger. There
exists a frequency under which the sound reduction index is very high. This is caused
by the poor radiation capacity of a wall under its first eigenfrequency. This frequency
is higher for smaller walls. Finally, in the high frequency zone the size of the wall can
modify the sound reduction index around ±5 dB (better isolation for small walls). It
can be seen for the case of the plasterboard for frequencies over 250 Hz. It has also
been found in Kernen and Hassan (2005) using analytical formulations that take into
account the finite size of walls.
A similar analysis has been carried out with the two-dimensional model. The
influence of wall length on the isolation is shown in Fig. 6.14(a). The sound reduction
index for three different heavy walls (2.5 m, 1.5 m and 0.5 m in length) has been
plotted. The first eigenfrequencies are 12.45 Hz, 34.59 Hz and 312.45 Hz respectively.
It can be seen that the sound reduction index is high below this frequency because it
is difficult for the wall to radiate sound into the receiving room. It is a clear example
that shows how the low and high frequency concepts depend a lot on the geometry.
For the last wall, 1000 Hz is still in the low-frequency range.
6.5.6 Influence of the mechanical properties and boundary
conditions of the walls
For models considering bounded domains, the boundary conditions of the tested wall
are required. Their effect on sound reduction index and also the importance of the
structural damping will be discussed in this section.
In Fig. 6.13 the effect of boundary conditions for the cases of a heavy and a
lightweight single wall can be seen. Several combinations have been considered (sup-
ported, clamped and free). For both types of wall, a low-frequency zone where bound-
ary conditions are important can be distinguished. For the case of the heavy wall, the
limit frequency is around 400 Hz while for the case of the lightweight wall it is around
50 Hz. In this limit frequency the vibration wave length is equal to the length of the
structure divided by 2.5.

158 Numerical modelling of sound transmission in single and double walls
10
20
30
40
50
60
70
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field Incidence Diff. Field (f > fc) s-s s-c
c-c c-f f-f
(a)
10
15
20
25
30
35
40
45
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field Incidence Diff. Field (f > fc) s-c
c-c c-f f-f
(b)
Figure 6.13: Influence of the boundary conditions (s = simply supported, c = clamped,f = free) of the wall in the sound reduction index: (a) heavy single wall; (b) lightweightsingle wall.
The effect of structural damping is shown in Fig. 6.14(b). It has no importance in
the low-frequency range where the response is controlled by room modes. However,
around and above the critical frequency it can improve the acoustic isolation and
attenuate the coincidence effect.
6.6 Acoustic isolation of double walls
Double walls are a common type of construction, widely used in practice. Quite good
acoustic performance can be reached by means of a reasonable low use of material.
The vibration mechanisms are very different from those of a single wall. As described
in Section 6.2, the interaction between leaves and the cavity inside is very important.
From a numerical point of view, there also are differences between vibroacoustic
problems dealing only with single walls and those dealing with double walls. The for-
mulation of the problem remains unchanged but some procedures have to be modified
due to the strong coupling of the cavity (i.e. the solver presented in Chapter 4 and

6.6 Acoustic isolation of double walls 159
20
30
40
50
60
70
80
90
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) l = 0.5 m
l = 1.5 m l = 2.5 m
(a)
20
30
40
50
60
70
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
Field incidence Diff. field (f > fc) η = 1%
η = 10% η = 20%
(b)
Figure 6.14: Heavy single wall. Influence of wall properties on the sound reductionindex: (a) length; (b) damping.
the selective coupling strategy).
The discussion is focused here on two particular aspects of double walls: the
effect of the type of absorbing material placed inside and the influence of mechanical
connections in the sound reduction index. The other parameters of the problem
are kept constant as described in Section 6.3. The effect of these two parameters
has also been studied in Novak (1992) and Hongisto et al. (2002) where laboratory
measurements can be found.
6.6.1 Influence of the separation between leaves and the type
of absorbing material
A double wall is rarely used without absorbing material placed in the cavity. The effect
of the quality of the absorbing material and the importance of the cavity thickness
have been studied by means of two-dimensional numerical simulations. The Delany
and Bazley (1970) model has been used in order to take into account the absorbing
material as an equivalent fluid. Thus, it is characterised by the resistivity. The

160 Numerical modelling of sound transmission in single and double walls
equations corresponding to this part of the model as well as the two leaves have
been solved by means of finite elements. If no absorbing material is placed in the
cavity, finite elements have also been used due to its reduced dimensions. On the
contrary, the rooms have been modelled by means of the modal approach. Results
obtained have been plotted in Fig. 6.15. The double wall described in Section 6.3 has
been analysed for two different cavity thicknesses (0.07 m and 0.175 m) and also for
different resistivity values of the absorbing material (% = 104, 3·104 and 5·104 Ns/m4).
10
20
30
40
50
60
70
80
90
100
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
air
σ = 10000 N•s/m4
σ = 30000 N•s/m4
σ = 50000 N•s/m4
(a)
10
20
30
40
50
60
70
80
90
100
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
air
σ = 10000 N•s/m4
σ = 30000 N•s/m4
σ = 50000 N•s/m4
(b)
Figure 6.15: Influence of the type of absorbing material on the sound reduction indexof double walls, for two wall thicknesses: (a) 0.07 m; (b) 0.175 m.
The effect of the absorbing material is important at very low and at high frequen-
cies. Around the mass-air-mass frequency, the sound reduction index is considerably
increased when absorbing material is placed inside the cavity. The quality of the
material is also important. Between this resonance and the coincidence frequency of
the leaves the increase of R is smaller. Finally, the effect of absorbing material is very
important for high frequencies and especially around the coincidence frequency.
Increasing the cavity thickness improves the isolation capacity of the double wall
for all the frequencies. Moreover, it also emphasises the effect of the quality of the

6.6 Acoustic isolation of double walls 161
absorbing material. The differences between R curves corresponding to different values
of resistivity are more relevant for double walls with a larger separation between leaves.
The general tendency and the influence of each parameter found in Fig. 6.15 is
similar to the prediction done by the one-dimensional model (see the example in
Section 3.4.3). This confirms that even if the one-dimensional model cannot be used
in order to perform very accurate predictions of the sound reduction index, it can give
a first approximation of the influence of each parameter.
6.6.2 Effect of mechanical connections between leaves
Mechanical connections between leaves have to be often used in order to provide a
minimum structural stability to the double wall. However, they create a new path
of sound transmission. This new path can be modelled by means of translational or
rotational springs that establish a link between points in both leaves. Numerical-based
models can deal with these springs with minor modifications in their implementation
(i.e. modification of the stiffness matrix or use of Lagrange multipliers).
A double wall with a 0.175 m thick cavity full of absorbing material (% = 8000
N/ (s · m4)) has been used in order to illustrate the effect of mechanical connections
(i.e. springs) in the sound reduction index. This is an adequate example because the
isolation of the wall without mechanical connections (with only cavity path) is high
(see results in Section 6.6.1). The springs have been placed each 0.6 m (four springs
per 3 m length double wall).
Four different values of translational stiffness and five of rotational stiffness have
been considered: Kt = 105, 106, 107 and 108 N/m2; Kθ = 10, 103, 104, 105 and 106 N·m/rad ·m. These ranges of variation are very related with the type of wall considered
(i.e. lightweight or heavy) and the isolation capacity of the cavity path. Thresholds
of stiffness over and under which the isolation capacity is not modified can be found.
Results are shown in Fig. 6.16.
In the low-frequency range (with the dimensions and material properties of the
problem, frequencies below 200 Hz) the value of stiffness is not important. It can be
seen that almost the same sound reduction index curve is obtained for all the studied

162 Numerical modelling of sound transmission in single and double walls
spring stiffnesses. On the contrary, for higher frequencies, the sound reduction index of
the double wall is completely dependent on the stiffness of the springs placed between
leaves. Differences larger than 40 dB are found.
The translational stiffness has more influence in the sound reduction index curves
than the rotational stiffness. It can be seen that variations in the translational stiffness
always cause modifications in the isolation (for all the studied values of rotational
stiffness). On the contrary, the value of rotational stiffness is irrelevant if high values
of translational stiffness are considered (i.e. for Kt = 108N/m2, where the same sound
reduction index is obtained for all the values of rotational stiffness).
The minimum frequency above which the rotational stiffness is an important pa-
rameter depends on the value of translational stiffness. For Kt = 105N/m2, the
influence of rotational stiffness begins at 315 Hz while for Kt = 107N/m2 it begins at
1000 Hz.
The translational stiffness is more important for mid frequencies. This changes
the slope of the curve. Rotational stiffness is more important for high frequencies
and especially around the critical frequency. The rotational stiffness also controls the
maximum value of sound reduction index reached. The different importance in the
frequency range is explained by the type of vibration waves found in the structure.
For low and mid frequencies, the vibrations of the structure are of large wave length.
The displacements are more translational than the rotational. On the contrary, for
high frequencies the displacements of the structures are very small and the rotations
large. These results will be used in Chapter 7 in order to model the role of steel studs
in the transmission of vibrations between leaves.
6.7 Concluding remarks
The sound reduction index of single and double walls has been predicted using numerical-
based models. The frequency range analysed is quite reasonable and interesting in-
formation for engineers is obtained. The vibroacoustic equations have been solved
without excessive simplifications and bounded domains and structures have been con-

6.7 Concluding remarks 163
20
30
40
50
60
70
80
90
100
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25 20 16
R (
dB)
f (Hz)
Kt = 105 N/m2
Kt = 107 N/m2
Kθ = 101 N•m/rad•m
Kθ = 103 N•m/rad•m
Kθ = 104 N•m/rad•m
Kθ = 105 N•m/rad•m
Kθ = 106 N•m/rad•m
20
30
40
50
60
70
80
90
100
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25 20 16
R (
dB)
f (Hz)
Kt = 106 N/m2
Kt = 108 N/m2
Kθ = 101 N•m/rad•m
Kθ = 103 N•m/rad•m
Kθ = 104 N•m/rad•m
Kθ = 105 N•m/rad•m
Kθ = 106 N•m/rad•m
Figure 6.16: Influence of the translational and rotational stiffness of mechanical con-nections (i.e. springs) between leaves in the sound reduction index of double walls.
sidered. This allows the analysis of environmental parameters (i.e. room sizes or
boundary conditions of the wall) besides the intrinsic parameters of the wall (i.e.
density or thickness).
A low-frequency study of the sound level difference of single and double walls has
been done. Two main conclusions can be obtained. On the one hand, the causes of
poor isolation at some particular frequencies can be the resonances of the wall or the
receiving acoustic domain. These dips in the sound level difference curve are attenu-
ated by structural damping and acoustic absorption. On the other hand, the number
of analysed situations per Hz depends on the attenuation of the problem (structural
damping and acoustic absorption reduce the number of required calculations).
Two and three-dimensional results of sound transmission for the same wall have
been compared. In spite of the differences in the modal density evolution of each
model version, the results are similar. Thus, with two-dimensional models, correct

164 Numerical modelling of sound transmission in single and double walls
approaches of the sound reduction index of prismatic situations (geometry, excitation
and boundary conditions) can be obtained.
The sound level difference curves of the same wall have been obtained for different
values of room absorption. The correction for absorption proposed by the pressure
method, Eq. (6.12), has been used in order to obtain sound reduction index curves.
Differences between R curves corresponding to different absorptions are around 5
dB (0 dB would be a perfect result in this analysis). Discrepancies are larger for
low frequencies and around coincidence frequency. The predicted values of sound
reduction index by the numerical model are always slightly higher than those predicted
by mass law type expressions.
The modelling of double walls has also been considered. It is more demanding
for the numerical model mainly due to the strong coupling between the leaves and
the cavity and the modelling of absorbing material. This second aspect is important
around eigenfrequencies, where sound reduction index can be significantly increased.
The separation between leaves is important in the whole frequency range.

Chapter 7
The role of studs in the sound
transmission of double walls
7.1 Introduction
Double walls are a common solution in lightweight structures. They are typically
constructed by means of two thin leaves (plasterboards, wood plates or similar) and
some kind of absorbing material placed inside the air cavity to improve the acoustic
isolation capacity of the system. In order to satisfy construction requirements and to
give a certain stiffness to the wall, some kind of connection has to be employed. Wood
beams or steel studs are examples of actual solutions. The studied double walls can
be seen in Fig. 1.1.
Cavity path Stud path
Figure 7.1: Sound transmission paths in a double wall with studs.
165

166 The role of studs in the sound transmission of double walls
These connecting elements cause the actual acoustic response of the wall to be
worse than that of an ideal double wall without connections between leaves. A new vi-
bration transmission path (besides the airborne or cavity path) is created, see Fig. 7.1.
Studs act as sound bridges between the two leaves. The decrease in the sound reduc-
tion index of the double walls highly depends on the mechanical properties (mainly
stiffness) of the connecting elements. An ideal one would be so flexible that does
not transmit vibrations from one leave to the other. In this chapter, the attention
is focused on the study and characterisation of lightweight cold-formed steel studs.
Their effect is very influenced by the cross-section shape.
Two direct applications can be mentioned. On the one hand, stud manufacturers
are interested in knowing which stud is better from an acoustic (vibration transmis-
sion) point of view. On the other hand, wave approach or statistical energy analysis
models cannot reproduce the exact geometry of the stud and require some parameters
describing its mechanical response. Some of these parameters can be provided by a
numerical model because it can deal with accurate geometry descriptions. Numerical
models can also deal with the whole problem. However, working with two different
levels of detail (rooms - double wall and stud shape) increases the meshing tasks and
the computational cost. Thereby, it is also interesting for a numerical approach to
simplify the modelling of the stud.
Several models dealing with double walls with connections can be found in the
literature. In the simplest cases the studs are considered as infinitely rigid connections
between the leaves (Fahy (1989)). Such models can be quite correct for rigid studs
(i.e. wood studs) but underestimate the isolating capacity of lightweight double walls
by neglecting the benefits of using steel studs, which are more flexible. In Wang et al.
(2005) or Kropp and Rebillard (1999) the two leaves of the double walls are supposed
to be connected by means of springs. Both translational and rotational springs are
considered. The value of the stiffness is considered to be constant in the frequency
range and it is typically taken from an elastic measurement (i.e. elastic stiffness of the
flange of the stud). In the model proposed by Davy (1991), each transmission path
is described by a different expression. They are piecewise-defined in the frequency

7.1 Introduction 167
domain and based on ad-hoc considerations, not in any governing equation. This
contrasts with Wang et al. (2005) and Kropp and Rebillard (1999), which solve the
vibroacoustic equations of the double wall by means of a wave approach.
All the models cited above predict the acoustic isolation of the double wall with
studs, but the characterisation of the connecting element is not their main goal. A
review of the more referenced models of sound transmission in double walls is done in
Hongisto (2006). It shows that only five of the seventeen models considered take into
account the possible existence of studs. Moreover only two of them allow these studs
to be flexible.
There are not many references dealing with the characterisation of the connecting
element. Some laboratory measurements of the effect of the studs in the sound reduc-
tion index can be found in Green and Sherr (1982a) and Green and Sherr (1982b).
The same type of steel studs studied in this chapter has been characterised in Hongisto
et al. (2002). Measurements of the dynamic stiffness of the isolated stud and its ef-
fect on the sound reduction index of double walls have been done. In Larsson and
Tunemalm (1998), studs with non-conventional cross-section shape have been tested
in order to check the improvement in sound isolation. However, studies dealing with
a deterministic approach to the problem (exact descriptions of stud geometry and
solution of the problem by means of analytical or numerical methods) can be rarely
found. No practical rule on how to choose the correct value of the stud stiffness has
been found. It is a necessary parameter in most of the models mentioned before. The
aim of our research is to study in detail how to characterise the studs.
The vibration response of small pieces of studs has been studied. Laboratory
measurements of the point mobility of the studs due to the application of a punctual
force in the upper flange have been compared with numerical models. The results
presented in Section 7.2 illustrate the main phenomena found in the vibration response
of this kind of structural elements.
The situations analysed (types of studs and double walls) are presented in Sec-
tion 7.3. Section 7.4 deals with the characterisation of the studs. Two different
models are employed. One reproduces the geometry of the stud while the other uses

168 The role of studs in the sound transmission of double walls
translational and rotational springs instead of studs. They are presented in detail in
Section 7.4.1. Differences in the performance of a double wall depending on the stud
type are shown in Section 7.4.2. A strategy based on the equivalence of transmission
of vibrations between leaves is employed in Section 7.4.3 in order to identify the values
of the spring stiffness. These values are employed in Section 7.5 as input data for an
statistical energy analysis model reproducing the same situation.
In Section 7.6 the sound reduction index between two rooms has been calculated
for different stud and wall types. The concluding remarks of the study are presented
in Section 7.7.
7.2 Vibration behaviour of steel studs
Several small pieces of steel studs have been tested in acoustique et eclairage depart-
ment of the Centre Scientifique et Technique du Batiment (CSTB) at Saint Martin
d’Heres (France), see Fig. 7.2. A punctual force is applied on the upper flange while
the lower flange is glued over a nut. The punctual mobility (Y = v/F , v is the velocity
and F the force) is measured in the point of application of the load.
A finite element model, using shell elements, has been developed. Several details
have been considered:
• Exact shape of the support zone.
• Geometry of the stud, taking into account the thermal slots in the web.
• Inclusion or not of the laboratory devices (vibrating machine which is in contact
with the top flange of the stud).
A typical result can be seen in Fig. 7.3. The measurement in laboratory of the point
mobility in a C-shaped section is compared with several numerical models. In the first
numerical model, only the steel stud has been considered. In the second one, both
the steel stud and the laboratory device have been included. For all the numerical
models the hysteretic damping is η = 3 %. This is a realistic value and causes the
attenuation of resonance peaks.

7.2 Vibration behaviour of steel studs 169
(a) (b)
K
M
F
R
(c)
Figure 7.2: Vibration behaviour of isolated studs: (a) experimental set-up; (b) finiteelement mesh; (c) mechanical device: the reaction R is different from the applied forceF .
The agreement between the laboratory measurements and the numerical results is
better in the second case. This indicates that, when measuring the point mobility (and
the dynamic stiffness) of a steel stud, the boundary conditions are very important.
The laboratory device gives an additional stiffness to the steel piece that modifies the
value of point mobility.
Various factors make the accurate agreement between the laboratory measure-
ments and the predicted response difficult. When testing an isolated stud piece, it
is too free to move. Some of the parameters are not well known, like the correct
amount of damping, the degree of constraint between solids or the characteristics of
the laboratory equipment.
In the low frequency range (f < 1000 Hz for this type of problem), a modal
behaviour zone can be seen. On the contrary, for high frequencies, the measured
curves become smoother.
If the stud is isolated, it is difficult to distinguish between translational and ro-
tational effects. Moreover, it is not clear that all the required information is well

170 The role of studs in the sound transmission of double walls
represented by the punctual mobility. It is a local measurement and the transmission
of vibrations from the upper to the lower flange is produced along the stud. The
reaction at the bottom flange can differ a lot from the applied force. Consider as an
example the device of Fig. 7.2(c). The reaction in the base R (t) = Re reiωt can be
expressed in terms of the applied force F (t) = Re ϕeiωt as
r =−Kϕ
−K + ω2M(7.1)
where K is the stiffness of the device and M its mass. This equation shows that the
reaction can differ a lot from the applied force depending on the frequency. The same
effect can be observed for some sections and it is difficult to know a priori when this
is important or not in order to predict the vibration transmission. For these reasons
and because of the importance of boundary conditions, we will consider from now on
the entire package leave-studs-leave, see Fig. 7.4. This situation is closer to the actual
use of studs in the double wall.
1e-05
1e-04
0.001
0.01
0.1
1
10
0 1000 2000 3000 4000 5000 6000
|Y| [
m/(
s N
)]
f (Hz)
measuredC + lab. deviceonly CEigenfrequencies
Figure 7.3: Comparison of the point mobility of a C-shaped stud measured in thelaboratory and the results obtained with two different numerical models. While oneof them considers only the stud piece the other takes into account laboratory devices.

7.3 Studs and leaves analysed 171
Figure 7.4: Laboratory tests of the entire package (studs and leaves).
7.3 Studs and leaves analysed
The analysis has been extended to several stud sections. The results presented here are
by default obtained using double walls with a separation between leaves (stud height)
of 0.07 m. Two other stud heights (0.125 m and 0.175 m) have been considered in
the analysis. For every height, several cross-section shapes have been studied. Five of
them will be employed in order to illustrate the most interesting aspects of the study.
They are plotted in Fig. 7.5, and the dimensions for the 0.07 m series can be found
in Table 7.1. Both conventional studs (TC, S, O) and acoustic studs (AWS, LR) are
analysed. Acoustic studs have a similar stiffness in the beam direction but are more
flexible at cross-section level than conventional studs. Experimental studies of the
influence of cross-sectional shape on acoustic performance can be found in Hongisto
et al. (2002) and Larsson and Tunemalm (1998).
Besides the changes at cross-section level, three different floor typologies have been
considered, see Tables 7.2 and 7.3. For all the situations, the length of the double
wall is 3 m and the separation between studs is 0.6 m (four studs employed in every
double wall). The leaves are supported at the beginning and ending points.
Efforts are focused on the characterisation of the studs by means of simple pa-

172 The role of studs in the sound transmission of double walls
TC AWS OS
d1
d2 d2 d4d5
d5
d4
d3d4
LR
Figure 7.5: Sketch of the stud cross sections.
Section d1 [m] d2 [m] d3 [m] d4 [m] d5 [m] e [mm]TC 0.07 0.04 0.01 – – 0.47LR 0.07 0.04 0.01 0.7·d2 0.2·d1 0.47S 0.07 0.04 0.01 0.2·d1 – 0.47O 0.07 0.04 – – – 0.47AWS 0.07 0.04 0.01 0.0241 0.013 0.47
Table 7.1: Dimensions of the cross sections according to the notation in Fig. 7.5. e isthe thickness of the section.
rameters like the translational stiffness Kt and the rotational stiffness Kθ of springs.
They are useful in order to describe vibration transmission, and provide useful data
for global models and manufacturers (decide which stud is better or if it is necessary or
not to improve it). Another important aspect to be checked is the need of considering
frequency-dependent parameters.
Case Upper leave Lower leave Connection ` [m] no. studsTest 1 GN GN ux, uy and θ 3 4Test 2 GN GEK ux, uy and θ 3 4Test 3 GEK GN ux, uy and θ 3 4
Table 7.2: Description of the three floor typologies.

7.4 Identification of the stiffness of studs 173
Meaning Symbol Value, GN Value, GEKThickness t 13 mm 13 mmYoung’s modulus E 2.5 · 109 N/m2 4.5 · 109 N/m2
Density ρsolid 692.3 kg/m3 900 kg/m3
Damping η 3 % 3 %
Table 7.3: Geometrical and mechanical properties of the leaves
7.4 Identification of the stiffness of studs
7.4.1 Cross-section structural vibration models
In order to study the vibration transmission path, the two structures of Fig. 7.6 are
considered. It is assumed that the transmission of vibrations between leaves of a
double wall can be studied at cross-section level. The required parameter for the
studs in sound transmission models is the cross-section stiffness or line stiffness. In
addition, the main difference between double walls using different stud types is found
at cross-section level. This is represented by the models of Fig. 7.6.
The output of interest is the vibration level difference between the upper and the
lower leaves
Dij = −10 log10 (dij) with dij =< v2
rms,j >
< v2rms,i >
(7.2)
where < • > is the spatial average of •, vrms,i is the root mean square velocity in
leave i (upper), where the force is applied, j is the receiving leave (lower) and dij is
the vibration reduction factor. Dij can be calculated from the data of the numerical
model as
Dij = 10 log10
(< |uupper|2 >< |ulower|2 >
)(7.3)
where uupper and ulower are the phasors of displacements for the upper and lower
leaves. The spatial average is done along the leave. A larger value of Dij means a
better vibration isolation.
In the detailed model of Fig. 7.6(a), the actual geometry of the stud is discretised.
In the connection between the stud flanges and the leaves, continuity of displacements

174 The role of studs in the sound transmission of double walls
and rotations is imposed. In the simplified model of Fig. 7.6(b), the stud is replaced
by a translational spring, a rotational spring and concentrated masses. The equiva-
lence between both models has been established by comparison of the vibration level
difference Dij.
For all the results presented here, four load configurations have been considered,
see Fig. 7.6(b). The positions of punctual loads have been chosen in order to be
representative: load applied over the stud or between studs, and at the centre of the
double wall or on the side. The study is done in terms of averaged responses: average
of the load position, average in time (over a period), average in frequency (the results
are given in third frequency bands) and average in space. Two different regions, the
upper and lower leaves, have been considered in order to perform space averages. One
analysis per Hz is carried out in order to describe the response spectrum; this implies
20 000 elastic calculations per case (case means, analysed section or analysed value of
stiffness in one of the three tests).
The structural spectral element method (see Doyle (1997) or Yu and Roesset
(2001)) has been chosen. In two-dimensional situations, the exact solution is reached
using only the necessary elements in order to describe the geometry (i.e. 5 elements
are required for the case of the TC cross-section, 9 for the AWS and 4 for the O). This
is a very important advantage since typical mesh requirements of the finite element
method can be forgotten. Results presented in Sections 7.4.2 and 7.4.3 are obtained
using this model.
7.4.2 Influence of stud shape in the vibration level difference
Fig. 7.7 is an example of the results obtained when comparing several sections. For
all of them, the isolation of vibrations in the low frequency range is really poor. It
cannot be improved by changing the stud shape. Note that standard sections like
TC, O or S provide an almost constant level of vibration isolation. On the contrary,
acoustic sections like LR or AWS improve the isolation of vibrations in the mid and
high frequency range (but they can be worse than the others for some frequencies in
the low frequency range).

7.4 Identification of the stiffness of studs 175
M
F
relationship: u u ( )x y θ
(a)
F 3
K Kθt
M/2F 1 F 2 F 4
(b)
Figure 7.6: Models of the leave-stud-leave package: (a) detailed model with the actualgeometry of the studs; (b) simplified model with studs modelled as a translationalstiffness Kt, a rotational stiffness Kθ and two concentrated masses M/2. F i indicatesthe four load positions considered.
-5
0
5
10
15
20
25
30
35
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
16
Dij
f (Hz)
AWSO
STC
LR
(a)
10
20
30
40
50
60
70
6300
5000
4000
3150
2500
2000
1600
1250
1000
Dij
f (Hz)
AWSO
STC
LR
(b)
Figure 7.7: Comparison of the vibration level difference for several studs with differentcross-section: (a) low-frequency range; (b) mid-frequency range. Note the differentvertical scales.

176 The role of studs in the sound transmission of double walls
The vibration level difference Dij is a useful parameter in order to compare the
performance of different studs used in the same double wall. However, it is an
environment-dependent parameter: the values of Dij do not only depend on the stud
type. They also depend on other variables, such as leave properties and boundary
conditions. Thus, Dij is not a parameter characterising the stud. As shown in the
following sections, the stiffness of the stud is a better parameter, less dependent on
each particular situation and more related with every stud type.
7.4.3 Stud equivalent stiffness
A set of admissible values of rotational and translational stiffness can be obtained by
comparing the two deterministic models presented in Fig. 7.6. The key is to find pairs
of values that provide, for a given frequency, the same vibration level difference.
This requires to generate surfaces of vibration level difference in the plane Kt -
Kθ for every third frequency band. The surfaces obtained for 200, 500, 1000 and
3150 Hz and for test 2 are shown in Fig. 7.8. They have been generated analysing
36 different situations combining values of Kt = 104, 105, 106, 107, 108, 109 N/m2 and
Kθ = 101, 102, 103, 104, 105, 106 N · m/ (rad · m).
Once the surfaces have been generated, the admissible values of rotational and
translational stiffness can be obtained by imposing the same value of vibration level
difference for both models of Fig. 7.6:
D(simplified)ij (Kt, Kθ) = D
(detailed)ij (7.4)
Both the surface D(simplified)ij (obtained with the simplified model, see Fig. 7.8) and the
value D(detailed)ij (obtained with the detailed model) are known. The equality provides
a set of admissible values (Kt, Kθ), which yield the same vibration isolation in the
simplified model and the detailed model.
The values for the TC section and test 2 can be seen in Fig. 7.9. Three sets of
figures like these ones have been obtained for every section (one for each test).
Several important aspects have to be highlighted. On the one hand, an equivalent

7.4 Identification of the stiffness of studs 177
0 10 20 30 40 50 60 70 80 90
f = 0200.0 Hz
10000 100000
1e+06 1e+07
1e+08 1e+09Kt [N/m2] 10
100
1000
10000
100000
1e+06
Kθ [N•m/rad•m]
0 20 40 60 80
100
Dij [dB]
0 10 20 30 40 50 60 70 80 90
f = 0500.0 Hz
10000 100000
1e+06 1e+07
1e+08 1e+09Kt [N/m2] 10
100
1000
10000
100000
1e+06
Kθ [N•m/rad•m]
0 20 40 60 80
100
Dij [dB]
0 10 20 30 40 50 60 70 80 90
f = 1000.0 Hz
10000 100000
1e+06 1e+07
1e+08 1e+09Kt [N/m2] 10
100
1000
10000
100000
1e+06
Kθ [N•m/rad•m]
0 20 40 60 80
100
Dij [dB]
0 10 20 30 40 50 60 70 80 90
f = 3150.0 Hz
10000 100000
1e+06 1e+07
1e+08 1e+09Kt [N/m2] 10
100
1000
10000
100000
1e+06
Kθ [N•m/rad•m]
0 20 40 60 80
100
Dij [dB]
Figure 7.8: Vibration level difference Dij in test 2 as a function of translationalstiffness Kt and rotational stiffness Kθ, for various frequencies.
effect in terms of Dij can be obtained using: i) only a translational spring; ii) only
a rotational spring; iii) and adequate combination of both. The option chosen here
is to use Kθ = 0 and a frequency-dependent Kt. On the other hand, a frequency
dependence of the parameters is observed. For low frequencies the values of stiffness
are smaller (around the typical values of elastic measurements), and they generally
increase with frequency.
For a given section, similar results are obtained for the three different tests. This
indicates that a steel stud can be characterised by parameters that not depend on
the environment (boundary conditions, leaves, symmetry of the double wall,...). In

178 The role of studs in the sound transmission of double walls
1e+01
1e+02
1e+03
1e+04
1e+05
1e+071e+061e+051e+04
Kθ
[N•m
/rad
•m]
Kt [N/m2]
f = 200 Hzf = 250 Hzf = 315 Hzf = 400 Hz
f = 500 Hzf = 630 Hzf = 800 Hzf = 1000 Hz
1e+01
1e+02
1e+03
1e+04
1e+05
1e+071e+061e+051e+04
Kθ
[N•m
/rad
•m]
Kt [N/m2]
f = 1250 Hzf = 1600 Hzf = 2000 Hzf = 2500 Hz
f = 3150 Hzf = 4000 Hzf = 5000 Hzf = 6300 Hz
Figure 7.9: Admissible values of rotational and translational stiffness for the TCsection obtained by comparison of deterministic models. Test 2.
Fig. 7.10, the results of tests 1, 2 and 3 for the AWS section are compared. The
agreement is not perfect; however, the tendencies are correct. The lines corresponding
to the same frequency are close together. The dispersion is more important for low
frequencies, where the modal behaviour governs the response and the number of modes
in the third frequency band is smaller. In the low-frequency range (frequencies under
200 Hz) it is difficult to obtain this kind of laws. The values of D(simplified)ij oscillate
between 0 dB and 5 dB depending on the value of the stiffnesses and the mechanical
and geometrical characteristics of the leaves. Thus, the intersection of the D(simplified)ij
surface with a constant value D(detailed)ij does not provide smooth curves like in Fig. 7.9.
In Fig. 7.11 a typical final output for this kind of analysis can be seen. Frequency-
dependent translational stiffness laws are presented for every section.
7.5 Using the stiffness values in a SEA model
The values of stiffness characterising the sections can be used as input data for other
modelling techniques. A clear example is its use as input data for Statistical Energy
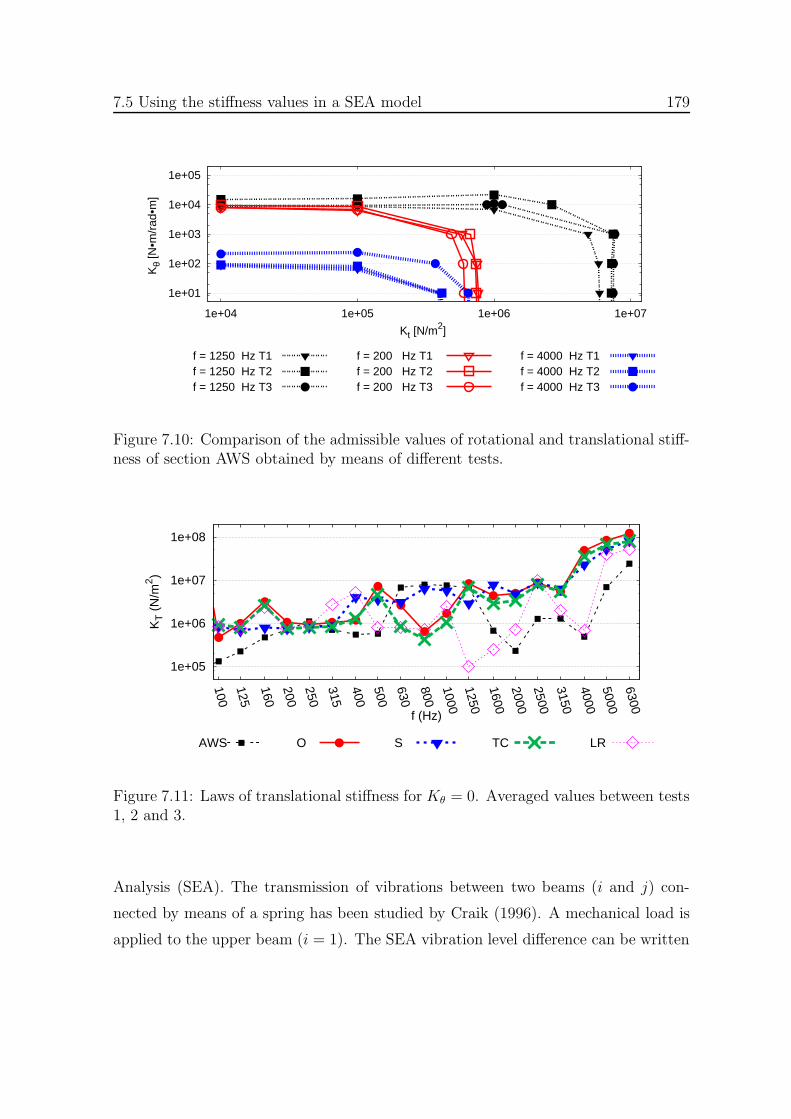
7.5 Using the stiffness values in a SEA model 179
1e+01
1e+02
1e+03
1e+04
1e+05
1e+071e+061e+051e+04
Kθ
[N•m
/rad
•m]
Kt [N/m2]
f = 1250 Hz T1f = 1250 Hz T2f = 1250 Hz T3
f = 200 Hz T1f = 200 Hz T2f = 200 Hz T3
f = 4000 Hz T1f = 4000 Hz T2f = 4000 Hz T3
Figure 7.10: Comparison of the admissible values of rotational and translational stiff-ness of section AWS obtained by means of different tests.
1e+05
1e+06
1e+07
1e+08
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
KT (
N/m
2 )
f (Hz)
AWS O S TC LR
Figure 7.11: Laws of translational stiffness for Kθ = 0. Averaged values between tests1, 2 and 3.
Analysis (SEA). The transmission of vibrations between two beams (i and j) con-
nected by means of a spring has been studied by Craik (1996). A mechanical load is
applied to the upper beam (i = 1). The SEA vibration level difference can be written

180 The role of studs in the sound transmission of double walls
as
Dij = D12 = 10 log10
(m2η2ω
|Y1 + Y2 + Yt|2nRe Y2
)(7.5)
where m2 is the mass per unit length, η2 is the loss factor, n is the number of con-
nections (springs) per unit length, Y1 and Y2 are the mobility of the two beams and
Yt is the mobility of a point connecting tie. The last parameter can be related to the
dynamic stiffness of this tie, Yt = v/F = iω/Kt, where Kt is the stiffness (in this SEA
model, only translational stiffness is considered), and v is the rate of length change
of the spring. For the mobility of the two beams, the formulas given in Cremer et al.
(1973) can be used
Y∞beam =1
4Ysemi-∞beam =
(1 − i)
4m`cBwith cB =
ω4
√ω2m`/E I
. (7.6)
m` is the density per unit length of the beam, E the Young’s modulus and I the inertia.
Note that two reference cases have been considered: infinite and semi-infinite beams.
The former provides better approximations for high frequencies where the influence
of boundaries is not important and the vibrations are localised due to damping. The
latter is a better approximation for low frequencies or situations where the mechanical
load is close to the boundary.
We have considered first the case of two beams connected by means of springs, see
Fig. 7.6(b). In this case the value of the stiffness is known and a ‘pure’ comparison
between the SEA model and the numerical method (SFEM) can be established with-
out additional errors caused by the uncertainties due to the characterisation of the
stud shape.
The results are presented in Fig. 7.12. The transmission of vibrations in test 2 has
been calculated with the numerical model and with the SEA model considering two
situations: infinite and semi-infinite beams. The agreement is correct. The numerical
results are closer to the infinite beam curve. Differences are smaller for mid and high
frequencies.
The modal behaviour at low frequencies is affected by the value of the stiffness.
For the smaller values of Kt, the two leaves are weakly connected and vibrations are

7.5 Using the stiffness values in a SEA model 181
20
30
40
50
60
70
80
90
100
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
Kt = 104 N/m2
0
10
20
30
40
50
60
70
80
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
Kt = 105 N/m2
-10
0
10
20
30
40
50
60
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
Kt = 106 N/m2
-5
0
5
10
15
20
25
30
35
40
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
SFEM
Kt = 107 N/m2
-4
-2
0
2
4
6
8
10
12
14
16
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
SEA inf
Kt = 108 N/m2
-4
-2
0
2
4
6
8
10
12
14
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Dij
f (Hz)
SEA semi-inf
Kt = 109 N/m2
Figure 7.12: Two leaves connected with springs. Comparison of the vibration leveldifference obtained by means of a numerical model (SFEM) and statistical energyanalysis. Note the different scale for Dij.

182 The role of studs in the sound transmission of double walls
developed all along the span length (3 m). Nevertheless, for larger values ofKt the link
between leaves becomes stronger, and each leave cannot be considered as a 3 m long
beam. Due to the connections it behaves like a group of short cells (space between
springs). Oscillations in the response curve are then important for frequencies below
400 Hz (Kt = 107 N/m2), 2000 Hz (Kt = 108 N/m2) and 4500 Hz (Kt = 109 N/m2).
Results presented here are also important in order to understand the type of laws
obtained for the translational and rotational stiffnesses. The values of Dij for some
of the studied sections have an small variation range. See for example the variation
of O, TC and S studs in Fig. 7.7(b), where the values of Dij are between 15 and
35 dB. On the contrary, the variation range of Dij for some cases of constant spring
stiffness is very large (see Fig. 7.12, Dij ∈ [25, 90] for Kt = 104 N/m2, Dij ∈ [10, 80]
for Kt = 105 N/m2, Dij ∈ [0, 60] for Kt = 106 N/m2 . . .). This means that the studied
sections behave like a spring of variable, rather than constant, stiffness. If the required
stiffness was constant, the variation of Dij obtained with the model considering the
geometry of the stud would be larger. This is not the case.
The same method has been used for the case where the two leaves are connected
by means of steel studs, see Fig. 7.6(a). In this case, two different errors are possible.
On the one hand the agreement between a SEA model and a numerical model (shown
with the previous example). On the other hand, the correct characterisation of steel
studs (Kt − f laws).
The results for AWS and TC studs are presented in Fig. 7.13. Again the vibration
level difference calculated by means of a numerical model and by means of the SEA
model is compared. Now, for the case of the SEA model, the value of stiffness is
variable with frequency. The laws obtained in Section 7.4.3 have been used as input
data.
This example shows how the double wall behaviour predicted by a model that
considers the geometrical detail of the studs can be reproduced by means of a SEA
model, where the geometrical complexity has been reduced to the use of a frequency-
dependent stiffness law.

7.6 Global response of double walls 183
0
10
20
30
40
50
60
70
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500400
315
250200160
125100
Dij
f (Hz)
SFEM
(a)
0
10
20
30
40
50
60
70
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500400
315
250200160
125100
Dij
f (Hz)
SEA infinite
(b)
Figure 7.13: Comparison of vibration level difference obtained by i) a detailed nu-merical model where the actual geometry of the studs is discretised (SFEM) and ii)a SEA model, which uses a frequency-dependent stiffness provided by the numericalmodel: (a) acoustic stud AWS; (b) standard stud TC.
7.6 Global response of double walls
In previous sections the effort has been focused on the characterisation of flexible steel
studs and the study of the vibration transmission path (vibration level difference). It
is only one of the parts of the problem of sound transmission. The performance of
the studs and the validity of results obtained in Section 7.4 is now verified in a two-
dimensional vibroacoustic problem. This means that both the stud path and the
cavity path are considered at the same time, see Fig. 7.1.
The relevance of acoustic design of studs depends on the type of double wall. If
the cavity path is very insulating, the stud path will be the critical path and then the
type of stud used is very important. On the contrary, if the isolation of the cavity
path is poor, the type of stud used will not be relevant because most of the sound is
not transmitted through the stud.

184 The role of studs in the sound transmission of double walls
The effect of mechanical connections between leaves has been studied in Sec-
tion 6.6.2. The main conclusion is that there are limit values of stiffness below and
above which the effect of the stud is not important. These limit values depend on the
type of double wall (separation between leaves, use or not of absorbing material, type
of leaves). If the modifications in the stud (shape, thickness, materials, damping) can
change its stiffness in this frequency range the optimisation is possible, otherwise the
type of stud used is not an important variable of the problem.
The model presented in Chapter 5 has been used. The studs have been considered
now, see the finite element mesh of Fig. 7.14. Two rectangular acoustic domains, the
two leaves connected by means of a steel stud and the cavity between leaves can also be
seen. The dimensions of the rooms are 5.7 m × 4.7 m and 6.35 m × 5 m. The double
wall is 3 m long. For some cases absorbing material (resistivity % = 8000 Pa · s/m2) is
placed inside the air cavity. The cavity has been considered continuous through the
studs. The opposite situation where small cavities between the studs are modelled
instead of a large single cavity can also be reproduced with the numerical model.
However, the thermal slots in the studs web establish a continuity in the air between
leaves that justifies the use of a single air cavity. A sound source has been placed in
the lower left corner of the sending room (separated 0.5 m from each wall). The value
of impedance in Robin contours is Z/ (ρ0c) = 19.03.
In Fig. 7.15 the sound level difference for the 0.07 m thick double wall with and
without absorbing material in the cavity can be seen. Several values of translational
stiffness have been considered. The limit values for this double wall are 105 N/m2 and
108 N/m2. It can be seen that the improvement by the use of flexible studs is larger if
there is absorbing material in the cavity (high cavity path isolation) than in the case
of air cavity (poor cavity path isolation).
Fig. 7.16 shows the results obtained from the vibroacoustic model where the springs
have been replaced by studs. A set of TC studs with increasing value of thickness
(0.00047 m, 0.001 m and 0.003 m) have been considered. The translational stiffness
laws obtained by means of the analysis presented in Section 7.4 for these TC studs
and the sound level difference of every section can be seen in Fig. 7.16(a). The value

7.6 Global response of double walls 185
(a) (b)
Figure 7.14: Finite element mesh used to solve the vibroacoustic problem: (a) generalview of the two rooms and the double wall; (b) detail in the double wall zone.
10
20
30
40
50
60
70
80
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25 20 16
D (
dB)
f (Hz)
Kt <= 105 N/m2
Kt = 106 N/m2Kt = 107 N/m2
Kt >= 108 N/m2
(a)
10
20
30
40
50
60
70
80
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
80 63 50 40 31.5
25 20 16
D (
dB)
f (Hz)
Kt <= 105 N/m2
Kt = 106 N/m2Kt = 107 N/m2
Kt >= 108 N/m2
(b)
Figure 7.15: Influence of the value of translational stiffness Kt (Kθ = 0). Sound leveldifference D: (a) double wall with air cavity; (b) double wall with absorbing material.Thickness of double wall: d = 0.07 m.

186 The role of studs in the sound transmission of double walls
of sound level difference provided by every stud is coherent (comparing Kt − f laws
and isolation of double walls with springs). Taking, for example the 0.001 m thick TC
stud, it can be seen in Fig. 7.16(a) that its Kt−f law goes from values under 107 N/m2
to values close to 108 N/m2. Fig. 7.16(b) shows that the sound level difference curve
of this stud also goes from values under the Kt = 107 N/m2 curve to values that are
close to the Kt = 108 N/m2 curve.
1e+06
1e+07
1e+08
1e+09
6300
5000
4000
3150
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
Kt (
N/m
2 )
f (Hz)
0.00047 m0.001 m
0.003 m
(a)
30
40
50
60
70
80
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
D (
dB)
f (Hz)
e = 0.00047 me = 0.001 me = 0.003 m
Kt = 106 N/m2
Kt = 107 N/m2
Kt = 108 N/m2
(b)
Figure 7.16: Influence of the thickness e of the studs: (a) Kt− f laws for a set of TCstuds; (b) sound level difference of a double wall with TC-studs and with springs ofconstant stiffness.
7.7 Concluding remarks
The influence of the stud type in the vibration transmission between leaves of a double
wall have been shown in Section 7.4.2. The results are dependent on many factors
like: local resonances; mechanical properties of materials that are always important
at least in some frequency range; type of link between the leaves and the studs. This

7.7 Concluding remarks 187
variability of the results is a found all along the study. However, it can be concluded
that some sections like AWS and LR provide a slightly better isolation of vibrations
than more usual sections (S,TC and O). The improvement is more important for
high frequencies. For low frequencies the difference of Dij between stud shapes is
small. Moreover it has no practical relevance if the entire vibroacoustic problem is
considered, see the low-frequency response in Fig. 7.15.
Two reasons explain the improvement in the isolation of vibrations of acoustic
studs. On the one hand, they are more flexible due to their cross-section shape.
However, this intuitive increase of flexibility is only true around the eigenfrequencies
where the central part of the stud acts as a spring, see Fig. 7.17(a). On the other hand,
acoustic studs have a larger perimeter. This represents an increase of the effective
damping in the vibration transmission path from the upper to the lower parts of the
stud. This is mainly relevant for high frequencies where the length of vibration waves
is smaller than a characteristic length of the stud. The displacements are small but
fast and dissipation is more relevant. This is the case of Fig. 7.17(b). The increase
of the vibration isolation in this frequency range could also be achieved by means of
some damping mechanism in the stud (i.e. use of materials with high damping). This
has not been considered here.
A methodology for the characterisation of studs has been presented. They can be
modelled by means of a translational spring with a frequency-dependent stiffness law.
In all the sections analysed the stiffness increases with frequency. These frequency-
dependent laws have been successfully used in SEA models of beams connected by
means of springs.
The effect of the stiffness of the spring connecting leaves of several double walls
has been studied. There are a minimum and a maximum value of stiffness below and
above which the isolation capacity of the wall is not modified. These two characteristic
values of the wall determine if it is important or not to improve the flexibility of the
stud. There is also a threshold of frequency below which the response of the wall is
not controlled by the stiffness of the connecting elements.
A comparison with the sound level difference of walls with springs between leaves

188 The role of studs in the sound transmission of double walls
0 1.1e-06 2.2e-06
|u| f=50 Hz
(a)
0 4e-09 8e-09
|u| f=2000 Hz
(b)
Figure 7.17: Different vibration shapes of a TC stud placed between leaves (zoom ofthe entire package): (a) f = 50 Hz, the stud vibrates by separating its upper andlower parts like an spring; (b) f = 2000 Hz, the vibration wave length is shorter thanthe stud.
and walls with studs has been done. The sound level difference curve of the double
walls with studs crosses the sound level curves of constant spring stiffness value. This
means that the stiffness of the stud is increasing with frequency. The behaviour is
correctly predicted by the obtained frequency-dependent stiffness laws.

Chapter 8
Numerical modelling of flanking
transmissions
8.1 Introduction
The sound transmission loss of building walls measured in the field (i.e. apartments,
offices, industries...) is often smaller than expected results. One of the possible
causes of a poor field response of an element with good properties in the laboratory
are flanking transmissions. That is, the indirect transmission of sound from one room
to another through any part of the building that is in contact with the wall (other
walls, floors, pipes,...). Prediction models and laboratory measurements usually deal
with an individual wall and only direct transmissions are considered.
Field measurements of flanking transmissions have been reported in the literature.
In Fothergill (1980) some real situations of apartments with poor sound isolation
properties are described. The cause is in most of them the existence of transmission
paths not considered during the design phase. The final solutions and measurements
showing the improvement (if possible) are shown for each case. Another example of
apartment affected by indirect transmission is shown in Hongisto (2001). Intensity
measurement methods are employed in order to characterise the transmission path.
This experimental technique not only provides spatial averaged information for every
189

190 Numerical modelling of flanking transmissions
room (pressure) but also qualitative information in the sense that the zones with
higher acoustic intensity can be characterised. Intensity methods have also been
used by van Zyl et al. (1986) in order to avoid the influence of flanking paths in
sound reduction index measurements. In Esteban et al. (2006) the effect of flanking
transmissions in buildings made of masonry walls is shown. The discussion is focused
on a paradoxical situation where the heaviest wall does not provide the highest sound
transmission loss. The increase of mass is, in that particular situation, positive from
the point of view of direct transmissions but negative for indirect transmissions. The
best solution is an intermediate wall with adequate properties for both types of sound
transmission.
The accurate modelling of flanking transmissions requires the consideration of
structural paths of vibration transmission. This can be done by means of simple
devices or coefficients connecting simplified structural elements (such as semi-infinite
plates) or by performing a detailed description of the structure. The importance
of construction details and boundary conditions is a significant challenge from the
modelling point of view. Due to the difficulties of sound transmission modelling,
these aspects are often simplified in the study of direct transmissions. This is not
valid for the case of indirect transmissions. In addition, the size of the problems is
increased due to the consideration of larger and more complex structures.
The number of available models for flanking transmission is not large, especially
when compared with models developed for direct sound transmission through single
and double walls. In Craik (2001), statistical energy analysis is used in the study of
long structural paths of sound transmission in buildings. A SEA model is also devel-
oped in Guyader et al. (1986). It is used in the modelling of a laboratory experimental
set-up. Theoretical results are compared with measurements with good agreement.
Experimental measurements in a flanking laboratory where different walls have an in-
tentional flanking path (transmission between floors) are reported in Hopkins (1997).
In Craik et al. (1997), a wave approach model is developed. Wave approaches are
based on the assumption of infinite or semi-infinite structures. Thus, this model is
limited to the study of a junction instead of an entire building or laboratory. The

8.1 Introduction 191
transmission of vibrations through an X-shaped junction involving a double wall is
calculated and used for the prediction of sound transmission. The data obtained by
means of the wave approach model is then used in a SEA model that considers both
airborne and structural paths. Numerical-based models have also been used in order
to predict flanking transmissions. In Clasen and Langer (2007), results obtained by
means of a two-dimensional finite element model have been compared with laboratory
measurements. The measurements have been done in a reduced scale laboratory. The
numerical model has been used in order to model in detail the junctions between the
floors and the walls. It has been shown that using elastic materials can improve the
isolation of the flanking paths.
The most global model for flanking transmissions is the one presented in Gerretsen
(1979) and Gerretsen (1986). The formulation is based on parameters characterising
the individual building components (sound reduction index, radiation efficiency and
surface of the partitions). The information of the relationship between the components
of the building that are in contact is reduced to a single parameter, the vibration
reduction factor (transmission of vibrations between floors, adjacent walls, floors and
walls,...). This model is the basis of the European regulation EN-12354 (2000). More
details will be given in the following sections since this code will be compared with
numerical results. The model is also assumed with minor modifications by some
national standards, which is the case of Spain in the new building regulation (CTE
(2007)). Field measurements are being done in order to ensure that the European
standard is also valid for the typical type of Spanish buildings (made of masonry or
stone), see Esteban et al. (2003). More simplified models are also assumed by other
regulations, Szudrowicz and Izewska (1995).
The numerical model presented in Chapter 5 has been used in order to predict
flanking transmissions in the case of acoustic excitation. Since the structure is mod-
elled by means of finite elements, both structural details and links (boundary con-
ditions) between walls can be considered. All the calculations presented here have
been done using a three-dimensional version of the model. In Section 8.3 some junc-
tions between monolithic structural elements will be analysed. A good and a poor

192 Numerical modelling of flanking transmissions
acoustic design of the junction between a double wall and a floor will be modelled in
Section 8.4.
8.2 The flanking transmission model of EN 12354
The more basic aspects of the EN 12354 model will be reviewed here. The goal of
this section is only to outline the simplified model used to compare with the obtained
numerical results. For a more detailed description of the model, the original papers
by Gerretsen (1979), Gerretsen (1986) or more recent discussions of the model like
Nightingale (1995) should be checked. The practical use of the model is described in
EN-12354 (2000) or CTE (2007).
The entire structure (building) is understood as an assembly of smaller structures
(typically walls and floors). The main assumption is that the total transmitted sound
is the addition of the sound transmitted through each of the paths (from one structure
to another). It is also assumed that there is no interaction between different paths (the
transmission of sound and vibrations through a given path is completely independent
from the others). Two important aspects in order to perform accurate predictions
are to correctly define the division of the building into structures and to identify
each transmission mechanism. The second aspect can depend on construction details
and more than one transmission path should be considered between two structures if
necessary (i.e. transmission from floor to floor due to structural continuity but also
due to passing pipelines).
The incident acoustic power in structure i caused by an acoustic excitation in the
sending room (reverberant field) can be expressed as WInc,i = Si⟨p2rms,s
⟩/4ρ0c. Si is
the surface of structure i,⟨p2rms,s
⟩is the mean pressure level in the sending room, ρ0
is the density of air and c the speed of sound in air. The power radiated by structure
j due to the excitation of structure i (caused by the pressure field in the sending
room) can be expressed as Wrad,j = ρ0cSjσj⟨v2rms,ij
⟩. σj is the radiation efficiency of
structure j and vrms,ij is the averaged root mean square velocity in structure j due to
the vibration of structure i. In the global problem the velocity of structure j is the

8.2 The flanking transmission model of EN 12354 193
addition of the velocities of each path ij, v2rms,j =
∑i v
2rms,ij .
The key idea of the model is to express Wrad,j as a function of the pressure in
the sending room. With this goal, the vibration transmission factor is defined as
dij = v2rms,j/v
2rms,i (j is the receiving structure and i the excited one). It characterises
the vibration path between structures i and j. The contribution to the pressure field in
the receiving room due to the transmission path ij,⟨p2r,ij
⟩, as well as the transmission
factor for path ij, can be expressed as
⟨p2r,ij
⟩=σjSjdij
⟨p2rms,s
⟩
σiAreceivingand τij =
Wrad,j
Winc,i
=σjSjdijτiσiS0
(8.1)
where Areceiving is the absorption in the receiving room, τi the sound reduction index
of structure i, and S0 the surface area of the element defining the direct transmission
path. The sound reduction index of path ij can then be expressed as
Rij := 10 log10
(1
τij
)= Ri +Dij + 10 log10
(σiσj
)+ 10 log10
(S0
Sj
)(8.2)
where Ri := 10 log10 (1/τi) is the sound reduction index of structure i and Dij =
−10 log10 (dij) the vibration level difference.
Historically, reciprocity (Rij = Rji) has been assumed. Thus, the radiation effi-
ciencies can be suppressed from the formula
R =1
2(Rij +Rji) =
1
2(Ri +Rj) +
1
2(Dij +Dji) + 10 log10
(S0√SiSj
)(8.3)
The averaged vibration level difference is maybe the key parameter in order to ac-
curately predict flanking transmissions. Since Dij depends on the damping and di-
mensions of the structure, standards tend to use the more environment-independent
vibration reduction index
Kij = Dν,ij + 10 log10
(`ij√aiaj
)with Dν,ij =
1
2(Dij +Dji) (8.4)
where `ij is the length of the junction and ai the characteristic absorption length of

194 Numerical modelling of flanking transmissions
structure i. An accepted approximation is to use ai = Si/L0 and L0 = 1 m. This
assumption is used in order to calculate Dν,ij . More accurate prediction formulas for
the characteristic length can be found for example in Crispin et al. (2006). The aim is
that Kij depends only on the junction type (shape) and the density and thicknesses
of the adjoint elements, and not on the particular dimensions and damping of the
structure.
Empirical expressions of Kij for several junction types are provided in the regu-
lation EN-12354 (2000). The transmission of vibrations through junctions has also
been modelled using a wave approach and compared with experimental data in Ped-
ersen (1995). This model has been largely applied for the prediction of flanking paths
in heavy monolithic constructions. In those cases, the critical frequency is low and
the sound transmission is mainly resonant. During the last years several comparisons
between the model proposed in the regulation and empirical measurements have been
published. Some of them have been summarised in Table 8.1. A brief description
of the measurement type, main results obtained and causes of discrepancy have also
been included. More details can be found on the cited references. This is especially
important in the field of flanking transmissions where small modifications of the input
data cause large variations of the final outputs.
Predictions can be inaccurate for the case of lightweight constructions. As dis-
cussed in Nightingale (1995), Guigou-Carter et al. (2006) and Villot (2002), indirect
transmissions are mainly a resonant phenomenon (the forced excitation of structures
by means of a coincident pressure field does not cause flanking transmissions). The
laboratory measurements of sound reduction index of individual elements (as well
as the data provided by models on sound transmission) include both the resonant
and the forced components. Data considering only the resonant component would be
necessary. Since it is often not available or not considered in usual expressions, the
EN 12354 model for flanking transmissions can underestimate the sound reduction
index of the flanking paths (especially below the critical frequency). Note that the
transmission factor of the excited structure τi is used in Eqs. (8.1) and (8.2).
In the following sections, the simplified model results (labelled EN in the plots)

8.2 The flanking transmission model of EN 12354 195
Reference Type Mat. Parameter Diff. (dB) Reason• Metzen (1999) I H, L R 2.0 ± 1.8 I, D, S• Pedersen (1999) I H, L R, Ln H : 0.3 ± 2.2
L : 0.25 ± 3.1• Esteban et al. (2003) I B Ki,j: X,T,E −2 to −10 S• Crispin et al. (2006) S C Ki,j: X,T,E −3.5 to 2 M, W• Galbrun (2007) FL C, B Di,j −1 to 5 L, I, D
Table 8.1: Recent published comparisons between EN 12354 and empirical data.Type of measurement (Type): in situ (I), flanking laboratory (FL), isolated structuralelement (S). Structure material (Mat.): heavy structures in general (H), lightweightstructures (L), concrete (C), hollow bricks (B). Analysed parameters (Parameter):vibration level difference (Di,j), vibration reduction index (Ki,j: X, T, L, H indicatethe junction type and E if elastic layer is considered for some of them), sound reductionindex (R), impact noise (Ln). The difference (Diff.) is always: predicted by EN 12354minus measured. Reason of discrepancies between predictions and measurements(Reason): consideration of details at junction level are necessary (D), the structure isnot monolithic (S), the modal density of the tested elements is low (M), long flankingpaths should be considered (L), an improvement of the input data is necessary (I),effect of workmanship (W).
are obtained using the expression
R =1
2(Ri +Rj) +Kij + 10 log10
(S0
`ijL0
)(8.5)
The sound reduction index of individual elements can be calculated by means of
the formulas discussed in Section 6.2 or in Beranek and Ver (1992), Josse (1975),
Fahy (1989) or Hongisto (2006). Most of the expressions found in the literature
mainly consider forced transmission. Their use leads to underestimation of the sound
reduction index on indirect paths in lightweight structures, especially for frequencies
below the critical frequency.

196 Numerical modelling of flanking transmissions
8.3 Sound transmission in rigid junctions
Different junction types have been analysed: L-shaped, T-shaped and X-shaped.
Rigid junctions have been considered. All the structures that coincide in the junction
are monolithic elements. Details like the existence of a pipeline or more complex
junction types (i.e. junctions with steel beams and plasterboards that are screwed)
have not been included in the analysis. In all the situations, the numerical results
are compared with the solutions obtained using the model described in Section 8.2.
The sound transmission between two rooms (L and T junctions) or four rooms (X
junction) is calculated. In Fig. 8.1 sketches and notation of the analysed situations
can be seen. The dimensions of the rooms are listed in Table 8.2.
Room 1 (and 4) Room 2 (and 3)Junction `x `y `z `x `y `z
L-shaped 2.24 2.56 2.4 2.64 2.56 2.4T-shaped (1st) 2.24 2.56 2.4 2.64 2.56 2.4T-shaped (2nd) 2.8 3.2 3 3.3 3.2 3X-shaped 2.5 2 2.3 2.8 2 2.3
Table 8.2: Room dimensions (in m) in each analysed situation.
All the calculations presented here have been carried out using a three-dimensional
numerical model. To the author’s knowledge, such three-dimensional simulations have
not been previously reported. The structure is modelled by means of finite elements
and the acoustic domains using modal analysis (see Chapter 5 for more details). The
sending room is room 1 (R1) in all cases. The absorption in all the rooms is α = 20 %.
The displacements in the contour of the structure are blocked. The material properties
for every case have been listed in Table 8.3. These values have been chosen in order to
maximise the effect of transmission paths according to the available empirical formulas
(minimise the vibration reduction index). In actual constructions there usually are
more differences between the stiffnesses and masses of orthogonal structures (floors
and walls).
In the case of the L-shaped junction, heavy and lightweight materials have been
considered. Thus, results for situations where the resonant transmission is predomi-

8.3 Sound transmission in rigid junctions 197
lylx
lz
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
########$$
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&''''''''''''''''''((((((((((((((((((((
))))))))))))))))))))))))))))))))))))))))))
********
++++++++
,,,,,,,,
------------------------------
...................................
////////
00000
11111111111111111111111111111111111
2222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222
333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333333
44444444
5555555555555555555555555555555555556666666 7777777777
8888888888
999999999999999999::::::::
;;;;;;;;
<<<<<<<<<<<<<<<<<<<<
====================>>>>>>>>?????????????????????????????? @@@@@@@@@@@@@@@@@@@@
AAAAAAAAABBBBBBBB
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCDDDDD
EEEEEEEEEEEEEEEEEEEE FFFFFFFFFFFFFFFFFF
GGGGGGGGGGGGGGGGGGGG
HHHHHHHHHHHHHHHHHHHH
IIIIIIIIIIIIIIIIIIIIIIIIIIIIII
JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
R1R2
L−shaped (B)
X−shaped
L−shaped (A)
T−shaped
R1
R1
R4
R315
3
4 6
2
R1
R2F
D d
D d
f F f
D d
R2
Ff
R1−Dd−R2
R2dD
R1−Ff−R3
U u
DfDd
Fd
Ff
Df
Dd
Fd
Dd
R1−Fu−R3
Figure 8.1: Cases analysed (and notation) of rigid monolithic junctions.
Junction Structure E (N/m2) ρsolid (kg/m3) η (%) thickness (m)
L-shaped (heavy) A, B F, f, D 2.943 · 1010 2500 3 0.06L-shaped (lightweight) A, B F, f, D 4.8 · 109 913 3 0.03T-shaped (heavy) A F, f 2.943 · 1010 2500 1 0.06T-shaped (heavy) A D 2.943 · 1010 2500 1 0.10T-shaped (heavy) B F, f, D 2.943 · 1010 2500 1 0.10T-shaped (heavy) C D 2.943 · 1010 2500 1 0.06T-shaped (heavy) C F, f 2.943 · 1010 2500 1 0.10X-shaped (heavy) F, f, D, U 2.943 · 1010 2500 3 0.05
Table 8.3: Geometric and mechanical data of each structural zone.
nant (low critical frequency for heavy structures) and for situations where the forced
transmission is dominant (high critical frequency for lightweight structures) will be
obtained. Two different floor positions are possible: floor over the sending room (A)
or floor over the receiving room (B). In both cases, there is a direct path (Dd) and

198 Numerical modelling of flanking transmissions
a flanking path (case A: Fd; case B: Df). The face 4 of the cuboid without fluid-
structure interaction is purely reflecting. It is the only surface that is not in contact
with a structure and has no absorption along all the analysis.
For the case of the T-shaped junction, only heavy structures have been considered
but two sets of room dimensions have been used. The aim is to check the effect of
small modifications in room dimensions for the flanking transmission problem. Three
different situations regarding the mass ratio between the floors (F,f) and the wall
(D≡d) have been taken into account: A, with lighter floors; B, where the floors and
the wall have the same thickness and mechanical properties and finally C, with heavier
floors.
Finally, for the case of the X-shaped junction, the interest has been focused on
the sound transmission caused only by indirect flanking paths. It is the case of
transmission between rooms 1 and 3. The flanking paths analysed in detail are those
that begin at the first floor (F): R1-Fu-R3 and R1-Ff-R3. Only heavy structures have
been considered and the room dimensions have been slightly diminished in order to
reduce computational costs.
One of the advantages of a numerical model is the possibility of studying situations
that are virtual modifications of the reality (i.e. boundary conditions can be easily
modified in the numerical model while it is difficult in a building). Each transmission
path can be modelled separately. This facilitates the understanding of the physical
phenomenon. Table 8.4 is a summary of the coupling boundary conditions used for
each junction type and for each analysed path. The ‘Complete’ situation is the actual
one. A building or a laboratory where there is interaction between each structure
and all the contiguous acoustic domains. On the contrary, in situations named Fd,
Dd, Df, R1-Ff-R3, . . . only some flanking path is allowed. Note that the sending and
receiving rooms are only indicated for the case of an X-shaped junction. The path
R1-Ff-. . . can generate sound in rooms 2 and 3.
For example, in the second row of Table 8.4, ‘L-shaped A Fd’, an L-shaped junction
in the configuration A (floor over the sending domain) is analysed. The allowed path
is the Fd since we can see that the sending acoustic domain is coupled with the floor F

8.3 Sound transmission in rigid junctions 199
but not with the wall face D. The receiving acoustic domain is coupled with the wall
face d. Then, the only possible path is: acoustic excitation of floor F in the sending
room, vibration transmission to the wall d which radiates sound into the receiving
room. Similar interpretations can be done for the other examples analysed. The
outputs obtained in this incomplete problems are the sound reduction index Rij of
the path and the vibration level difference Dij.
The notation used in the figures showing the numerical results is illustrated by the
following example:
T-B F-f DF,d (8.6)
Three items are identified: where three item make possible the definition of the anal-
ysed situation:
1. Structure analysed. In that example the T-shaped junction with the material
properties B (T-B). The other possibilities are: L-A, L-B, T-A, T-B, T-C and
X.
2. Flanking path allowed (fluid-structure boundary condition). In that example
transmission through the floor (Ff). The first symbol is always related with the
sending room and the second one with the receiving room. The notation deals
only with the structural parts of the path, see Fig. 8.1.
3. Finally, the type of output calculated is shown. This can be the sound reduc-
tion index or the vibration level difference. In the example, the vibration level
difference between the first floor F and the wall d has been calculated. Note
that for the case of the X-shaped junction the notation U,u is introduced for the
upper wall. All the reference values obtained from the EN 12354 or the Spanish
technical code are indicated with EN or CTE respectively (the mass-law type
expressions found in Fahy (1989); Beranek and Ver (1992) are used for the direct
paths). For the case of sound reduction index, the situations where the total
sound reduction index (all the possible paths are considered and contribute to
the final value) has been calculated, have the subindex of the sending and re-
ceiving rooms (i.e. RR1,R2). For the cases of the sound reduction index of an

200 Numerical modelling of flanking transmissions
individual path, the structural elements defining the path are used as subindices
(i.e. RF,u).
Junction Case Room Coupling Room Couplingfaces faces
L-shaped A Complete 1 3, 4 2 1L-shaped A Fd 1 4 2 1L-shaped A Dd 1 3 2 1L-shaped B Complete 1 3 2 1, 4L-shaped B Df 1 3 2 4L-shaped B Dd 1 3 2 1T-shaped Complete 1 3, 4 2 1, 4T-shaped Ff 1 4 2 4T-shaped Fd 1 4 2 1T-shaped Df 1 3 2 4T-shaped Dd 1 3 2 1X-shaped Complete 1 3, 4 2 1, 4
3 1, 2 4 2, 3X-shaped S0 = D, R1-Ff-R2 1 4 2 4X-shaped S0 = D, R1-Fd-R2 1 4 2 1X-shaped S0 = D, R1-Df-R2 1 3 2 4X-shaped S0 = D, R1-Dd-R2 1 3 2 1X-shaped Only Flk, R1-Ff-R3 1 4 3 2X-shaped Only Flk, R1-Fu-R3 1 4 3 1
Table 8.4: Definition of the allowed flanking paths and boundary conditions in eachsituation.
8.3.1 L-shaped junctions
The vibration reduction index in the corner of a structure (L-shaped) can be predicted
using the following formula proposed in CTE (2007):
Kij = max (15|M | − 3,−2) (dB) with M = log10
((ρsurf)⊥i(ρsurf)i
)(8.7)
(ρsurf)i is the surface density of the excited structure i and (ρsurf)⊥i is the surface
density of the orthogonal structure (in the case of an L-shaped junction, the structure
j). Eq. (8.7) will be used in the simplified calculation of all transmission paths.
In Fig. 8.2, the results obtained for the heavy structure are plotted. The vibration

8.3 Sound transmission in rigid junctions 201
level difference is quite constant with frequency and no large differences exist between
paths (reciprocity can be assumed). However, the numerical values are considerably
larger than the values obtained with the simplified model (2 to 8 dB higher). This
causes important differences in the sound reduction index of the indirect paths. While
in the numerical model the difference between direct and indirect paths is around 8
dB, the simplified model predicts differences around 4 dB. With these numerical val-
ues, the effect of the flanking path can be neglected and cases A and B are equivalent.
Moreover, numerical isolation predictions for a single path are also higher than the
classical predictions using equations Eqs. (6.4), (6.5) and (6.9) (this has also been
seen in Chapters 5 and 6). This is caused, on the one hand, by the discrepancy fi-
nite structure/infinite structure, especially important at low frequencies. The effect
of the finite size of panels on the sound reduction index has been studied in Kernen
and Hassan (2005) and differences around 3 dB have also been found. On the other
hand, Eq. (6.5) especially takes into account the effect of coincidence. In heavy finite
structures with low critical frequency, a pure coincidence would rarely be found. Low
modal densities (limited number of wave types) as well as different boundary condi-
tions for the structure (supported, Dirichlet) and for the air pressure (low absorption
and almost purely reflecting acoustic boundaries) makes it difficult to find perfectly
matching pressure and displacement waves.
The same comments are valid for the case of the lightweight construction presented
in Fig. 8.3. The main difference is the frequency range where the response is modal.
While for the heavy structure the response is modal for frequencies below 350 Hz, for
the lightweight case it is only modal under 100 Hz.
8.3.2 T-shaped junctions
For the case of the T-shaped junctions a larger number of situations have been anal-
ysed. In situation ‘A’, the wall D≡d is heavier than the two floors F and f. Case
‘C’ is the inverse situation (F and f heavier). Finally, in case ‘B’ all structures are of
the same type. The first set of room dimensions (see Table 8.2) has been used in ‘A’,
while the second set for ‘B’ and ‘C’.

202 Numerical modelling of flanking transmissions
-4
-2
0
2
4
6
8
10
12
14
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) CT
E (
dB)
f (Hz)
L-A, DF-d CTE L-B, DD-f CTE L-A, D-d DD,F
L-A, F-d DF,d L-B, D-d DD-f L-B, D-f DD,f
(a)
20
25
30
35
40
45
50
55
60
1000
800
630
500
400
315
250
200
160
125
100
80
63
R (
dB)
f (Hz)
L-B, RD,f EN L-B, D-f RD,f L-B, D-d RD,d
L-B, RR1,R2 EN L-B, Complete RR1,R2
(b)
Figure 8.2: L-shaped junction of a heavy structure: (a) vibration level difference; (b)sound reduction index of each flanking path for case B (S0 = SD). The equivalentfigure for case A is very similar.
0
2
4
6
8
10
12
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) CT
E (
dB)
f (Hz)
L-A, DD-F CTE L-B, DD-f CTE L-A, D-d DD,f
L-A, F-d DF,d L-B, D-d DD,f L-B, D-f DD,f
(a)
10
15
20
25
30
35
40
45
50
500
400
315
250
200
160
125
100
80
63
R (
dB)
f (Hz)
L-B, RD,f EN L-B, D-f RD,f L-B, D-d RD,d
L-B, RR1,R2 EN L-B, Complete RR1,R2
(b)
Figure 8.3: L-shaped junction of a lightweight structure: (a) vibration level difference;(b) sound reduction index of each flanking path for the case B (S0 = SD). Theequivalent figure for case A is very similar.

8.3 Sound transmission in rigid junctions 203
The formula providing the value of the vibration reduction index between struc-
tures F and f and vice versa can be found in EN-12354 (2000) and CTE (2007)
Kij = 5.7 + 14.1M + 5.7M 2 (dB) (8.8)
and for the transmission between orthogonal structures
Kij = 5.7 + 5.7M 2 (dB) (8.9)
The calculated values of vibration level difference for the case of a heavy structure
have been plotted in Fig. 8.4 (case A) and Fig. 8.5 (case B). The agreement is better
than for the previous case (L-shaped junction) and differences for the higher calcu-
lated frequencies are not larger than 4 dB. The sense of vibration transmission is
very important now for the case of orthogonal structures. This is illustrated by the
differences between the values of DF,D and DD,F , see Fig. 8.4. Reciprocity cannot be
accepted in this situation. This hypothesis is assumed by the simplified model and
can be a source of error. Again, moderate variations with frequency in the vibration
reduction index have been found.
Since the discrepancies between numerical results and the empirical formulas in
the prediction of Kij are smaller, the agreement in terms of sound reduction index
is better. In Fig. 8.6 the sound reduction index for situations ‘A’ and ‘C’ has been
plotted. The difference between flanking paths is the same in the numerical and the
simplified results. In ‘A’ the effect of flanking transmissions is around 2 dB, and in
‘C’ they have no influence on the results. This can be explained by means of the
difference in the isolation of the direct path. While in ‘A’ the differences in the sound
reduction index of the direct and the flanking paths are around 5 dB, in ‘C’ they are
around 15 dB. In this second case, the flanking path can be neglected.

204 Numerical modelling of flanking transmissions
6
8
10
12
14
16
18
20
22
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
T-A, Dν, F-f EN T-A, Ff DF,f T-A, Fd DF,f
(a)
0
5
10
15
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
T-A, Dν, F-d EN T-A, D-f DD,F T-A, F-f DF,D T-A, D-f DD,f
(b)
Figure 8.4: Vibration level difference for the case A of a T-shaped junction in a heavystructure: (a) between floors; (b) between the floors and wall.
0
5
10
15
20
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
T-B, Dν, F-f EN T-B, F-f DF,f T-B, F-d DF,f
(a)
0
5
10
15
20
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
T-B, Dν, F-D EN T-B, D-f DD,F T-B, F-f DF,d T-B, D-f DD,f
(b)
Figure 8.5: Vibration level difference for the case B of a T-shaped junction in a heavystructure: (a) between floors; (b) between the floors and wall.

8.3 Sound transmission in rigid junctions 205
20
25
30
35
40
45
50
55
60
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
T-A, RF,f, EN T-A, F-f, RF,f
T-A, RD,d, EN T-A, D-d, RD,d
T-A, RR1,R2, EN T-A, Complete, RR1,R2
(a)
20
30
40
50
60
70
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
T-C, RF,f, EN T-C, F-f, RF,f
T-C, RD,d, EN T-C, D-d, RD,d
T-C, RR1,R2, EN T-C, Complete, RR1,R2
(b)
Figure 8.6: T-shaped junction in a heavy structure: (a) the wall is heavier than thefloors (case A); (b) inverse situation (case C). Sound reduction index for some of theflanking paths: transmission through the floors F,f; only direct transmission D,d; andcomplete situation R1,R2. S0 = SD.

206 Numerical modelling of flanking transmissions
8.3.3 X-shaped junctions
The case of an X-shaped junction has also been analysed. It is a larger problem since
four acoustic domains are involved: one sending room and three receiving rooms.
Moreover, in the sound transmission from room 1 to room 3 only flanking paths exist.
The expression provided by EN-12354 (2000) and CTE (2007) for the X-shaped
junction and transmission of vibrations between aligned elements (F ↔ f and D ↔U) is
Kij = 8.7 + 17.1M + 5.7M 2 (dB) (8.10)
and for orthogonal structures (F/f ↔ D/U) the expression is
Kij = 8.7 + 5.7M 2 (dB) (8.11)
In Fig. 8.7, vibration level differences predicted by means of Eqs. (8.10) and (8.11) have
been compared with numerical results. Only some representative vibration transmis-
sion paths have been plotted (i.e. results obtained for the path ‘X, F-f DF,d’ are very
similar than for the paths ‘X, F-f DF,u’, ‘X, F-d DF,u’ and ‘X, F-d DF,d’). The agree-
ment is acceptable for all the analysed situations, with differences less than ±2.5 dB.
The junction analysed has the same masses in all the surrounding structures. Thus,
the reciprocity (Di,j = Dj,i) of vibration transmission paths has not been verified for
that junction type.
Sound reduction index calculations in the case of the X-shaped junction are shown
in Fig. 8.8. The discussion is focused on two different situations of sound transmission:
from room 1 to room 2 (Fig. 8.8(a), with direct and indirect paths) and from room
1 to room 3 (Fig. 8.8(b), where there are only indirect paths). In the first case, the
nominal surface is the surface of structure D (S0 = SD). In the second, the nominal
surface has been taken as all the surfaces receiving incident acoustic power in the
sending room (S0 = SF + SD).
The comparison with the EN-12354 (2000) model is very similar to that of the
T-shaped junction. The same comments are valid: correct characterisation of paths
and slightly higher isolation predicted by the numerical model. Each flanking path

8.4 Case-study of flanking transmission 207
4
6
8
10
12
14
16
18
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
X, Dν, F-f EN X, F-f DF,f X, F-d DF,f
(a)
2
4
6
8
10
12
14
16
18
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
(Dij)
num
and
(D
ν, ij
) EN
1235
4 (
dB)
f(Hz)
X, Dν, F-d EN X, F-f DF,d X, D-d DD,F X, D-d DD,f
(b)
Figure 8.7: Vibration level difference for an X-Shaped junction (heavy structure).Only some representative transmission paths are shown: (a) between floors; (b) be-tween orthogonal elements (floor wall). Only rooms 1 and 2 considered.
contributes in the same way to the sound transmission between rooms 1 and 3.
The velocity field of the X-shaped structure and the pressure distribution in each
of the four rooms at a frequency of 100 Hz are plotted in Fig. 8.9.
8.4 Case-study of flanking transmission
In the examples of previous section, flanking transmissions were not the dominant
transmission path. The global sound reduction index is only slightly smaller than the
sound reduction index of the main path (direct transmission). Differences increase if
the four walls in the rooms (four indirect paths) were considered. In order to illustrate
the possible importance of flanking transmissions, a structure with an intentional
flanking path and a direct path with high acoustic isolation has been analysed, see
Fig. 8.10. Two rooms are separated by a heavy double wall and the floor in the first
room is connected to the first or to the second leave of the double wall. This can be
understood as a comparison between a correct and a poor building acoustic design.

208 Numerical modelling of flanking transmissions
15 20 25 30 35 40 45 50 55 60 65 70
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
R (
dB)
f (Hz)
X, RF,d, EN X, F-d, RF,d
X, RD,d, EN X, D-d, RD,d
X, RR1,R2, EN (with flk) X, Complete, RR1,R2
(a)
25
30
35
40
45
50
55
60
65
70
1250
1000
800
630
500
400
315
250
200
160
125
100
80
63
50
40
R (
dB)
f (Hz)
X, RF,f, EN X, F-f, RF,f
X, RF,u, EN X, F-u, RF,u
X, RR1,R3, EN X, Complete, RR1,R3
(b)
Figure 8.8: Sound reduction index for several flanking paths in an X-shaped junctionin a heavy structure: (a) between rooms 1 and 2, direct and flanking transmissionS0 = SD; (b) between rooms 1 and 3, all the transmission is caused by flanking paths,
S0 = (l(s)x + l
(s)z ) × l
(s)y = SD + SF .

8.4 Case-study of flanking transmission 209
(a) (b)
Figure 8.9: Sound transmission in an X-shaped junction (heavy structure): (a) veloc-ity field, v2
rms = |vvv|2/2 (m2/s2); (b) sound pressure level L (dB). f = 100 Hz.
The air cavity between concrete leaves (D and d) is strongly coupled. The coupling
of the main rooms is weak. This has to be taken into account when solving the linear
system of equations in order to be efficient. The block Gauss-Seidel strategy with
selective coupling presented in Chapter 4 has been used.
Coupling Absorption Structure
R1 R2
(A)
R1 R2
(B)F F
D d D d
s
Figure 8.10: Case-study of flanking transmission. In case (A) only direct transmissionD-d is possible. In case (B), the path F-s-d is also possible.
The list of analysed situations (and flanking paths) can be seen in table 8.5. In the

210 Numerical modelling of flanking transmissions
A-type cases, only the first leave D of the double wall is connected to the structure
F while in the B-type this leave is not attached but the second leave d is linked to
structure F by means of the small piece s. Two different transmission paths have
been analysed: direct transmission through the double wall (R1-D-d-R2) and indirect
transmission from the flanking structure to the radiating leave (R1-F-s-d-R2).
Case Structures Room Coupling Room Coupling(A) Complete F,D,d 1 3, 4 2 1(B) Complete F,s,D,d 1 3, 4 2 1
(B) F-d F,s,D,d 1 4 2 1(B) D-d F,s,D,d 1 3 2 1
Table 8.5: Definition of the allowed flanking paths in the example of the double wall.
The calculated sound reduction indices between rooms 1 and 2 have been plotted in
Fig. 8.11. For frequencies below 80 Hz the isolations in all situations are very similar.
However, for higher frequencies, two different response types can be distinguished. On
the one hand, cases ‘(A) Complete’ and ‘(B) D-d’. All the sound is here transmitted
through the double wall, which leads to large values of sound reduction index. On the
other hand, cases ‘(B) Complete’ and ‘(B) F-d’. Here the main path is the flanking
path. In both situations the upper structures can directly transmit vibrations to the
second leave d. The sound does not need to pass through the air cavity. Sound
reduction index is very similar in these two situations. This means that the sound
transmitted through the double wall can be neglected if compared with the sound
transmitted via flanking path (in case ‘(B) Complete’ both transmission paths are
possible while in (B) F-d only the indirect one).
8.5 Concluding remarks
A numerical-based model for flanking transmissions has been presented. Finite struc-
tures and bounded acoustic domains have been considered. The analysed acoustic
domains (dimensions) could perfectly be small building or laboratory rooms and the
frequency range considered is more than a low-frequency approach.

8.5 Concluding remarks 211
20
30
40
50
60
70
80
90 800
630
500
400
315
250
200
160
125
100
80
63
50
40
31.5
25
20
R (
dB)
f (Hz)
(A) Complete (B) Complete (B) F-d (B) D-d
Figure 8.11: Sound reduction index in a situation with important flanking transmis-sions.
The effort has been focused on the analysis of junctions between monolithic struc-
tural elements. This is a geometrically simple case where other formulations (EN-
12354 (2000)) and experimental measurements are available. This has been considered
correct for a first numerical approach to flanking transmissions.
The type of results obtained are similar than the experimental measurements
shown in Hopkins (1999). They are characterised by a large variation in the low-
frequency range that diminishes for higher frequencies. The comparisons with the
expressions proposed in EN-12354 (2000) for the vibration reduction index Kij have
bounded discrepancies (see Table 8.1 that illustrates typical ranges of variation for
flanking transmission problems). However, these oscillations in results have been often
found around the expected value of Kij. The causes of this response type are:
• EN 12354 expressions are based in large statistical analyses dealing with real
building constructions (mainly monolithic and made of concrete). These con-
structions are not perfectly homogeneous (like a finite element shell) since often
have details at junction level.
• The modal density of most of the structural elements included in the EN 12354
statistical analysis is higher than the modal density of the analysed structures.

212 Numerical modelling of flanking transmissions
Moreover, a constant value of Kij is only found at high frequencies.
Both aspects are future improvements to be taken into account in the FEM modelling
of flanking transmissions.
The most important differences between the numerical results and the EN 12354
predictions have been found for the L-shaped junction. The numerical isolation of the
flanking path is larger than the predicted value.
The consequences of flanking transmissions for a double wall have also been anal-
ysed. Large differences have been found between the correct acoustic design, where
the transmission of vibrations through the floor is not possible, and the poor acoustic
design, where a flanking transmission path through the floor exists.
This is an example of how numerical-based models can provide useful information
in the field of flanking transmissions. To model a more detailed junction or structure
does not imply very important modifications of a numerical model. Flanking trans-
missions are based in statistical results (i.e. Ki,j). This requires the analysis of a large
number of situations. The measurements are often complicated. On the one hand,
tests in flanking laboratories are expensive and time-consuming (each structure has
to be built). On the other hand, field measurements often have uncertainties in the
real data of the walls and junctions (how has the building really been constructed).
These drawbacks of flanking transmission analysis can be overcome by means of nu-
merical models. To analyse a large number of situations is only a matter of time and
the material data and junction details are exactly known. In addition, the increase
of computational resources and the improvement of numerical techniques will make
possible to increase the frequency range of the analyses or the number of analysed
situations and parameters.
Accurate predictions of flanking transmissions in the low-frequency range cannot
be done by means of the EN12354 simplified model. The averaged parameters lead
to large differences between prediction and measurements.

Chapter 9
Numerical modelling of radiation
efficiency
9.1 Introduction
Studying the radiation characteristics of vibrating bodies has historically been an im-
portant topic of acoustic engineering. The way in which the vibration of an elastic solid
in an acoustic fluid generates sound is the typical situation of interest. The response
of the system depends on the physical properties of the fluid (speed of propagation
of sound c and density of the fluid ρ0) and the physical and geometrical properties of
the solid.
The most relevant output of interest is the radiation efficiency σ, defined as
ρ0cS < V 2nnn > σ = P with P =
∮III ·nnndS (9.1)
where P is the acoustic power flow through a closed, arbitrary surface radiated by
the vibrating solid (source of sound), III is the acoustic intensity, S is the surface of
the radiating body and Vnnn is the normal velocity of the vibrating surface, averaged in
time (•) and in space (< • >).
The radiation efficiency is a useful parameter which describes, in general terms,
how much sound is a body able to radiate. Comparisons between the radiation ca-
213

214 Numerical modelling of radiation efficiency
pability of solids with different body shapes, material properties, types of boundary
conditions and excitations,... can be done. The radiation efficiency is an input of
some acoustic models based in SEA. Its experimental or analytical determination is
not simple.
The problem of acoustic radiation has been solved analytically for solids with
simple shapes. The most typical example is the radiation of sound by rectangular
plates, see for example Wallace (1970), Gomperts (1977) and Berry et al. (1990).
However, it has also been necessary to study the radiation efficiencies of solids with
arbitrary shapes. Several integral formulations of the problem were developed by
Copley (1968), Chen and Schweikert (1963) and Chertock (1964). They are, in fact,
the precedent of the numerical methods most frequently used nowadays in order to
solve radiation problems (i.e. BEM).
The more academic solutions (plates, spheres) are the basis for models that con-
sider details of the structure. Examples can be found in Villot et al. (2001), where
the radiation efficiency of finite plates is calculated by means of a combination of a
wave-based approach and a windowing technique (which allows to take into account
the finite size of the studied bodies), or Jeyapalan and Richards (1979), where the
radiation efficiency of beams with arbitrary cross section is studied.
An important issue in building acoustics is to know whether the radiation efficiency
of a wall or a floor is the same for both faces of the element. As shown in Chapter 8,
an usual hypothesis in sound transmission models is to assume a single radiation
efficiency for each element, which is independent on the sense of radiation. However,
structural elements are often not symmetric. A typical example is a floor or a wall
consisting of a plane board with beams in one side.
In Section 9.2, the problem is studied at the cross-section level. Two-dimensional
FEM and BEM models are used in order to calculate the radiation efficiency of a floor
with and without beams. Since we are interested in taking into account the particular
shape of the beams, the acoustic domains are not rectangular. For this reason, the
model presented in Chapter 5 cannot be used.

9.2 Role of beams in the radiation of a surface 215
9.2 Role of beams in the radiation of a surface
In the examples presented here, unbounded domains are not considered. The radiation
efficiency (9.1) is indirectly calculated by means of data obtained from the numerical
model. The averaged velocity < V 2nnn > is a direct output and the acoustic power flow
P is obtained like in Chapter 5 by supposing a reverberant pressure field. The only
data required from the numerical model is the averaged pressure.
The first situation studied is the radiation of a simply supported wood beam that
is excited by means of a punctual force and radiates sound into a rectangular room, see
Fig. 9.1(a). The mechanical and geometrical properties are summarised in Table 9.1.
Meaning Symbol ValueYoung’s modulus E 1010 N/m2
Poisson’s ratio ν 0.25Solid density ρsolid 400 kg/m3
Thickness t 0.02 mBending inertia I 6.67 · 10−7 m4/mArea A 0.02 m2/mWall length ` 3 m
Table 9.1: Material and geometrical properties for the example of a single vibratingelement.
The calculated radiation efficiency is plotted in Fig. 9.2. The smaller values of
radiation are found for low frequencies, where oscillations caused by the modal be-
haviour of the structure are found. The radiation efficiency is small below the critical
frequency fc. At the critical frequency the wave length of acoustic and vibration
waves is the same and the radiation efficiency reaches its maximum value. For high
frequencies the radiation efficiency tends to a constant value (σ ≈ 1, see for example
Fahy (1989)).
As described in Wallace (1970), the radiation efficiency of finite structural elements
and the critical frequency can be understood through a modal analysis. The parameter
γ = k/kn, where k = ω/c is the wave number of the acoustic waves in air and
kn = 2πfn/c = nπ/` is the wave number of the studied structural eigenfrequency fn,

216 Numerical modelling of radiation efficiency
is the most important parameter in order to understand when the radiation is high.
Each structural mode has two relevant frequencies. On the one hand its eigenfre-
quency. For the case of the n-mode of a simply supported beam
fn =1
2π
√√√√EI
ρsolid
(A− I
(nπ`
)2)(nπ`
)2
(9.2)
On the other hand the geometrical coincidence frequency, fgc. At that frequency, the
length of acoustic waves in air and the length of vibration waves in the structure are
the same. For the case of the beam and considering parallel acoustic waves, it can be
expressed as fgc = knc/2π (this value is different if other directions of acoustic waves
are considered). At the geometrical coincidence frequency fgc, γ = 1.
The maximum radiation is reached when the frequency of the excitation f is
similar to the two frequencies fn and fgc. In this situation, the frequency is exciting
the eigenfrequencies of the structure that can radiate more sound. It is the critical
frequency, f = fc. In the example studied here it happens between modes 11 and 12
(see Table 9.2).
n 1 2 3 4 5 6 7 8fgc 56.67 113.33 170 226.67 283.33 340 396.67 453.33fn 5.04 20.15 45.35 80.64 126.02 181.50 247.10 322.83n 9 10 11 12 13 14 15 16fgc 510 566.67 623.33 680 736.67 793.33 850 906.67fn 408.71 504.76 610.99 727.44 854.12 991.07 1138.32 1295.89
Table 9.2: Eigenfrequency fn and geometrical coincident frequency fgc of every struc-tural mode.
The peak in radiation that can be seen in Fig. 9.2 is related with modes 11 and
12.
The situation presented in Fig. 9.1(b) has been analysed in order to compare the
differences in radiation depending on the side of the floor. The floor is composed of
a wood leave and I-shaped profiles (73 mm in width and 140 mm in height). The
separation between steel beams is 350 mm.

9.2 Role of beams in the radiation of a surface 217
F2
rms<p >
(a)
F
upward
downward
(b)
steel and wood
wood
steel
(c)
Figure 9.1: Sketch of the problems analysed: (a) radiation of sound into a rectangularroom of a single leave (beam) that is mechanically excited; (b) radiation of an asym-metric floor into two rooms; (c) detail of the three zones (with different material andgeometrical properties) considered in the modelling of the floor.
-14
-12
-10
-8
-6
-4
-2
0
2
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
10 lo
g 10(
σ)
f (Hz)
Figure 9.2: Radiation efficiency of case of Fig. 9.1(a).

218 Numerical modelling of radiation efficiency
The structural cross section has been modelled by means of beam finite elements.
As seen in Fig. 9.1(c), three different regions have been considered in order to assign
the geometrical and material properties of Table 9.3: zones where there only is wood
board, zones with only steel stud and zones where the wood board and the steel stud
are overlapped. Homogenised values of geometrical and mechanical properties have
been used in the latter case (they are indicated with ∗).
In both situations, floor with and without steel beams, the surface considered to
calculate the radiation efficiency is S = 3 m. It is the horizontal length of the vibrating
floor. The perimeter of the floor taking into account the steel studs is 5.55 m.
Physical region: Wood plate Steel section
Meaning Symbol Value Value
Young’s modulus E 1010 N/m2 2.0601 · 1011 N/m2
Hysteretic damping coefficient η 0.05 0.05
Density ρsolid 400 kg/m3 7500 kg/m3
Thickness t 0.04 m 0.01 m
Physical region: wood and steel
Meaning Symbol Value
Young’s modulus E∗ 2.0601 · 1011 N/m2
Hysteretic damping coefficient η∗ 0.05
Density ρ∗solid 7620.39 kg/m3
Equivalent thickness t∗ 1.194 · 10−2 m
Equivalent inertia per unit width I∗ 1.358 · 10−6 m3
Table 9.3: Geometrical and mechanical properties for the floors composed by a woodplate and steel sections. ∗ means homogenised value.
The floor is again excited by a punctual force and can radiate sound upwards and
downwards. The results are presented in Fig. 9.3. The radiation efficiency is larger
for the side with steel studs (non-planar face). The radiation upwards (planar face) is
very similar to the radiation calculated for a leave without studs. The pressure level
in the lower room is higher than in the upper room, see Fig. 9.3(b).
The steel profiles act as shakers of the acoustic fluid in the room downstairs, so

9.3 Concluding remarks 219
it is reasonable that the sound level there is higher. This effect can only be captured
by models taking into account the geometry of the floor. The differences in σ are
relevant.
-25
-20
-15
-10
-5
0
5
10
2500
2000
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
10 lo
g 10(
σ)
f (Hz)
Without beamsI-beams downwardsI-beams upwards
(a)
0.1
1
10
100
1600
1250
1000
800
630
500
400
315
250
200
160
125
100
Rat
io o
f pre
ssur
e
f (Hz)
(b)
Figure 9.3: Results for the example in Fig. 9.1(b): (a) radiation efficiency ofa floor depending on the side; (b) ratio of pressures, pressure downwards (facewith steel profiles) divided by the pressure upwards (radiation of a planar face),< p2
rms >downwards / < p2rms >upwards.
9.3 Concluding remarks
The effect of steel beams in the radiation efficiency of a wood board has been studied.
A two-dimensional and numerical-based model that describes the actual geometry at
cross-section level has been used. The calculated differences in the radiation efficiency
between plane and irregular shaped (due to the studs) floors are around 4 dB.
The obtained results suggest that considering the exact geometry can be rele-
vant for the radiation efficiency of floors and walls. For some construction elements,
considering only the mass and thickness is not enough in order to perform accurate
predictions of sound transmission.
The modelling of flanking transmissions (i.e. the models used in the EN-12354

220 Numerical modelling of radiation efficiency
(2000) and CTE (2007) regulations presented in Chapter 8) is a typical case where it
is assumed that the radiation of sound is equal in both faces of a wall or a floor. It
has been shown here that this hypothesis can be inadequate for asymmetric elements.

Chapter 10
Conclusions and future work
This thesis deals with the numerical modelling of the sound transmission problem.
Three different parts can be distinguished: i) a general introduction to the problem
with emphasis on building acoustics and a review of existing numerical techniques,
done in Chapters 1 and 2; ii) developments of numerical-based models, in Chapters 3
to 5; iii) technological applications, in Chapters 6 to 9.
The most important contributions of the thesis are summarised in Section 10.1.
Future research lines are suggested in Section 10.2.
10.1 Conclusions and contributions of the thesis
1. One-dimensional model for vibroacoustics. The main difference between the pre-
sented model and other existing simplified models for sound transmission prob-
lems is the consideration of finite acoustic domains. Some vibroacoustic phe-
nomena cannot be reproduced due to its one-dimensional nature. However, ana-
lytical solutions that can be compared with numerical-based models considering
bounded domains are obtained. Basic parametric analyses can be successfully
performed (i.e. influence of acoustic absorption, separation between leaves of
a layered partition or the effect of the resistivity of absorbing materials placed
inside air cavities). Two important conclusions of Chapter 3 are:
221

222 Conclusions and future work
• Structural damping and acoustic absorption provide attenuation (i.e. pos-
itive imaginary part of the pulsation ω) to the vibroacoustic eigenfrequen-
cies. On the one hand, this ensures that a pure real value of the excitation
frequency will never be an eigenfrequency of the problem (leading to singu-
lar matrices in two and three-dimensional problems). On the other hand,
the undamped eigenproblem provides accurate approximations to the real
part of the damped eigenfrequencies.
• The dips in the sound reduction index are mainly caused by the resonances
of the receiving domain and the structure. This aspect (among others) that
can be predicted with a one-dimensional solution has also been found in
two and three-dimensional models.
2. The block Gauss-Seidel method in sound transmission. The performance of the
block Gauss-Seidel solver for interior vibroacoustic problems has been assessed
both analytically and numerically. A physical interpretation of the well-known
convergence condition (spectral radius of iteration matrix smaller than one) is
provided. For simple one-dimensional problems, analytical expressions of the
spectral radius have been obtained. The main contributions of Chapter 4 are:
• Proposal of a selective coupling strategy where some of the acoustic blocks
are solved at the same time than the structural blocks. This has been
used for the case of double walls where the cavity blocks are solved at the
same time than the structure. Otherwise, a sound transmission problem
with double walls cannot be solved with the standard block Gauss-Seidel
approach.
• The most influencing aspects in the convergence of a block iterative solver
in sound transmission problems are shown by the analytical expressions of
the spectral radius. They are the ratio of stiffnesses of the structure and
the acoustic domains, the degree of coupling (dependent on the density of
the fluid and the speed of sound) and the eigenfrequencies of the problem.
3. Combined modal-FEM approach for vibroacoustics. The proposed model is an

10.1 Conclusions and contributions of the thesis 223
efficient approach to the solution of the vibroacoustic equations when the acous-
tic domains are cuboids (which is often the case of rooms). The main conclusions
of the analysis of the presented formulation as well as the improvements with
respect to similar approaches are:
• A general block implementation is done. In consequence, the analyses can
be extended to situations different from the sound transmission between
two rooms (i.e. flanking transmissions). Moreover, the solver presented
in Chapter 4 is used and no assumptions on the level of coupling between
the acoustic domains and the structure is required (the iterations are not
stopped till convergence).
• The actual acoustic absorption in the numerical model has been compared
with the simplified expressions (see Pierce (1981) and Bell and Bell (1993))
often used for the calculation of the sound reduction index. In the low-
frequency range differences are large due to the poor modal density (dif-
fuse pressure field is required for the simplified expressions). For higher
frequencies, the agreement is better but the absorption provided by the
numerical model is slightly higher than the one calculated with simplified
expressions from the same values of admittance. In practise it represents
a difference inferior to 1 dB in sound reduction index predictions.
4. Numerical modelling of sound transmission in single and double walls. The nu-
merical model presented in Chapter 5 and a FEM-FEM model have been used
in order to calculate the sound reduction index of single and double walls. Some
of the more relevant aspects of the obtained results are:
• The sound reduction index curves for single walls obtained with numerical
based models are slightly over the predictions done by means of classical
mass-law type expressions.
• The same consequences of acoustic absorption and eigenfrequencies on the
sound reduction index predicted by the one-dimensional model of Chapter 3
have been found with a two-dimensional FEM-FEM model.

224 Conclusions and future work
• Similar sound reduction index curves have been obtained with two and
three-dimensional versions of the modal-FEM model. This analysis has
been done in a problem where all the elements of the three-dimensional
model (geometry, boundary conditions, properties of the structure, the
excitation on the structure caused by a diffuse pressure field,...) can be
obtained by extrusion of the two-dimensional model.
• The influence of most of the analysed parameters (i.e. position of the
sound source, room dimensions, boundary conditions of the structure) is
important for the lower frequencies. The influence zone depends on the
structure type (i.e. heavy or lightweight).
• Other parameters, like the size of walls and windows, can be important in
the whole frequency range.
5. The role of studs in the sound transmission of double walls. One of the analysed
parameters of double walls in Chapter 6 has been the influence of the stiffness
of springs connecting leaves in the sound reduction index. This variation is
large. Numerical models have been used in order to characterise the role of
steel studs in the vibration transmission path. This is a difficult task. A lot
of parameters are important: cross-section shape of the stud, geometrical and
mechanical properties of the studs and the leaves of the double wall, type of con-
nection stud-leave, degree of constraint. In addition, many other aspects have
not been considered by the numerical models used: point connections instead
of line connections, influence of the quality of the workmanship, consideration
of non-linearities (i.e. contact between the stud and the leave or non-harmonic
oscillations). The most important aspects derived from the analysis are:
• In the low-frequency range, the differences in the vibration level difference
caused by the use of different studs are not important.
• Acoustic studs provide better isolation of vibrations than standard studs.
The comparison has to be done by considering the whole frequency range
and not only particular frequencies. The causes of improvement are the in-

10.1 Conclusions and contributions of the thesis 225
crease of flexibility at cross-section level and the additional damping caused
by an increase of perimeter.
• Frequency-dependent laws of stiffness are proposed in order to reproduce
the stud behaviour by means of a spring.
• The predictions obtained by means of a SEA model have been reproduced
with the numerical models.
6. Numerical modelling of flanking transmissions. Sound transmission problems
where more than the direct path is possible has also been considered. It is
the case of structures that are more complex than a single or a double wall.
Two problems have been analysed: transmission of vibrations through different
junctions types (L, T and X shaped junctions) and sound transmission through
a double wall with or without flanking transmissions from the floor. Only three-
dimensional structures have been considered. Several aspects of the analysis
should be highlighted:
• The general agreement between the numerical results and the predictions
done by means of the simplified model proposed in EN-12354 (2000) is
good. The important transmission paths have been correctly identified.
• Due to the nature of the model used (three-dimensional FEM with bounded
structures and acoustic domains, limitation to low and mid frequencies),
the calculation of the vibration reduction index Ki,j have important vari-
ations in the low-frequency range. However, these oscillations have often
been found around the expected value of Ki,j and diminish with frequency
or averaging the results of multiple situations.
• If the EN-12354 (2000) is used to analyse the sound transmission in the
low-frequency range, large errors will be found.
• The most important discrepancies have been found for the case of an L-
shaped junction.

226 Conclusions and future work
7. Numerical modelling of radiation efficiency. The radiation efficiency of asym-
metric structural elements (i.e. lightweight floors with a planar face and steel
beams on the other side) has been calculated. Differences around 4 dB depend-
ing on the radiation side have been found. This means that for some structures
the principle of reciprocity is not valid and considering details is important for
the accurate predictions of sound reduction index.
10.2 Future developments
1. Precision estimation. Numerical-based models are a very useful and precise tool.
However, their use is also time consuming and computationally expensive. The
vibroacoustic phenomena are often complex and depend on many factors. Some-
times uncertainties on the data of the problem are important. It is then nec-
essary to know how these uncertainties affect the outputs of interest (R, L, %,
Kij). This information is very interesting in order to decide the type of model
to be used and if the precision provided by a numerical-based tool is masked or
not by the uncertainties of the problem data.
2. Improvement of modal analysis for vibroacoustic problems. This may be done
along the following two lines and trying to keep the important advantages of
modal analysis (i.e. the systems of linear equations to be solved are very simple):
• Enrichment of the interpolation space in order to have normal acoustic ve-
locity at contours. Two possibilities should be considered: i) use of eigen-
functions of different eigenproblems (i.e. eigenfunctions with null pressure
at contours); ii) overlapping of finite elements and a modal basis in some
parts of the domain.
• Combination of modal analysis with standard numerical techniques like
FEM or BEM in order to analyse more complex geometries efficiently. This
would be of great interest in problems like the radiation efficiency of floors
analysed in Chapter 9. The surroundings of the studs would be modelled

10.2 Future developments 227
by means of FEM or BEM while the rest of the acoustic domain could be
described by means of a modal approach.
3. Error estimation for vibroacoustics. To the author knowledge, there are no anal-
yses of the effect of vibroacoustic coupling on the numerical error. To check if
the well-known a priori error estimators for the acoustic and dynamic uncoupled
problems remain unmodified for the vibroacoustic problem would be necessary.
4. Flanking transmissions.The analysis presented in Chapter 8 can be improved
and extended. The following lines are proposed:
• Consider more complex situations or detailed structures that are often
found in actual buildings (i.e. structures with a framework made of steel
beams and single and isolated walls linked only to the steel frame). Numer-
ical models can provide information for detailed structures without major
modifications of the formulation.
• Consider the case of impact noise. Flanking transmissions could be more
important due to mechanical (instead of acoustic) excitation.
• Extend the presented examples in number and frequency (by optimisa-
tion of the numerical tool) in order to generate more data to be treated
statistically.
• Provide numerical comparisons between Di,j and Ki,j. Analyse the effect
of damping and the dimensions of the structural element.
5. Study the effect of slits in sound transmission. This is an example of vibroa-
coustic situation where numerical-based models can provide very useful informa-
tion. The geometry is important and analytical solutions or simplified models
are not easy to formulate. Slits are found in real life measurements. The main
drawback is the need to perform calculations at mid and high frequencies where
the influence of slits is more important.


Bibliography
Ahmida, K. and J. Arruda (2001). Spectral element-based prediction of active powerflow in Timoshenko beams. Int. J. Solids Struct. 38 (10–13), 1669–1679.
Ainsworth, M. and J. Coyle (2001). Hierarchic hp-edge element families for Maxwell’sequations on hybrid quadrilateral/triangular meshes. Comput. Methods Appl. Mech.Eng. 190, 6709–6733.
Ainsworth, M. and J. Coyle (2003). Hierarchic finite element bases on unstructuredtetrahedral meshes. Int. J. Numer. Methods Eng. 58, 2103–2130.
Ali, A., C. Rajakumar, and S. Yunus (1995). Advances in acoustic eigenvalue analysisusing boundary element method. Comput. Struct. 56 (5), 837–847.
Argyris, J. and H. Mlejnek (1991). Texts on computational mechanics. Volume V.Dynamics of structures. Amsterdam: North–Holland.
Astley, R. (2000). Infinite elements for wave problems: a review of current formula-tions and an assessment of accuracy. Int. J. Numer. Methods Engng. 49, 951–976.
Atalla, N. and R. Bernhard (1994). Review of numerical solutions for low-frequencystructural-acoustic problems. Appl. Acoust. 43, 271–294.
Babuska, I. and J. Melenk (1997). The partition of unity method. Int. J. Numer.Methods Eng. 40, 727–758.
Babuska, I., B. Szabo, and I. Katz (1981). The p-version of the finite element method.SIAM J. Numer. Anal. 18 (3), 515–545.
Balay, S., K. Buschelman, V. Eijkhout, W. D. Gropp, D. Kaushik, M. G. Knepley,L. C. McInnes, B. F. Smith, and H. Zhang (2004). PETSc users manual. TechnicalReport ANL-95/11 - Revision 2.1.5, Argonne National Laboratory.
Balay, S., K. Buschelman, W. D. Gropp, D. Kaushik, M. G. Knepley,L. C. McInnes, B. F. Smith, and H. Zhang (2001). PETSc Web page.http://www.mcs.anl.gov/petsc.
229

230 BIBLIOGRAPHY
Balay, S., W. D. Gropp, L. C. McInnes, and B. F. Smith (1997). Efficient manage-ment of parallelism in object oriented numerical software libraries. In E. Arge,A. M. Bruaset, and H. P. Langtangen (Eds.), Modern Software Tools in ScientificComputing, pp. 163–202. Birkhauser Press.
Banerjee, R. (1997). Dynamic stiffness formulation for structural elements: a generalapproach. Comput. Struct. 63 (1), 101–103.
Bardell, N. (1996). An engineering application of the h-p version of the finite elementmethod to the static analysis of a Euler-Bernoulli beam. Comput. Struct. 59 (2),195–211.
Bardell, N., J. Dunsdon, and R. Langley (1997). Free vibration analysis of coplanarsandwich panels. Compos. Struct. 38 (1–4), 463–475.
Barrett, R., M. Berry, T. F. Chan, J. Demmel, J. Donato, J. Dongarra, V. Eijkhout,R. Pozo, C. Romine, and H. V. der Vorst (1994). Templates for the Solution ofLinear Systems: Building Blocks for Iterative Methods, 2nd Edition. Philadelphia,PA: SIAM.
Bathe, K. (1996). Finite element procedures. Prentice Hall.
Bathe, K., C. Nitikitpaiboon, and X. Wang (1995). A mixed displacement-based finiteelement formulation for acoustic fluid-structure interaction. Comput. Struct. 56 (2),225–237.
Batoz, J. (1980). A study of three-node triangular plate bending elements. Int. J.Numer. Methods Eng. 15, 1771–1812.
Batoz, J. (1982). An explicit formulation for an efficient triangular plate-bendingelement. Int. J. Numer. Methods Eng. 18, 1077–1089.
Bell, L. and D. Bell (1993). Industrial noise control. New York: Dekker.
Benitez Alvarez, G., A. Dourado Loula, E. Gomez Dutra do Carmo, andF. Alves Rochinha (2006). A discontinuous finite element formulation for Helmholtzequation. Comput. Methods Appl. Mech. Eng. 195 (33-36), 4018–4035.
Beranek, L. and I. Ver (1992). Noise and vibration control engineering. John Wileyand sons.
Berglund, B., P. Hassmen, and J. Soames (1996). Sources and effects of low-frequencynoise. J. Acoust. Soc. Am. 99 (5), 2985–3002.

BIBLIOGRAPHY 231
Bermudez, A., R. Duran, R. Rodrıguez, and J. Solomin (2000). Finite element analysisof a quadratic eigenvalue problem arising in dissipative acoustics. SIAM J. Numer.Anal. 38 (1), 267–291.
Bermudez, A. and R. Rodrıguez (1999). Modeeling and numerical solution of elas-toacoustic vibrations with interface damping. Int. J. Numer. Methods Eng. 46 (10),1763–1779.
Berry, A., J. Guyader, and J. Nicolas (1990). A general formulation for the soundradiation from rectangular, baffled plates with arbitrary boundary conditions. J.Acoust. Soc. Am. 88 (6), 2792–2802.
Beselin, O. and J. Nicolas (1997). A hierarchical functions set for predicting very highorder plate bending modes with any boundary conditions. J. Sound Vibr. 202 (5),633–655.
Bonnet, M. (1999). Boundary integral equation methods for solids and fluids. Wiley.
Bouillard, P. and F. Ihlenburg (1999). Error estimation and adaptivity for the finiteelement method in acoustics: 2D and 3D applications. Comput. Methods Appl.Mech. Eng. 176 (1–4), 147–163.
Bouillard, P., V. Lacroix, and E. De Bel (2002). A meshless approach for 2D vibro-acoustic problems. Revue europeenne des elements finis 11 (7–8), 947–964.
Bouillard, P., V. Lacroix, and E. De Bel (2004). A wave-oriented meshless formulationfor acoustical and vibro-acoustical applications. Wave Motion 39, 295–305.
Bouillard, P. and S. Suleau (1998). Element-free Galerkin solutions for Helmholtzproblems: formulation and numerical assessment of the pollution effect. Comput.Methods Appl. Mech. Eng. 162 (1–4), 317–335.
Boyd, J. (1999). Chebyshev and Fourier spectral methods. New York: Dover.
Brebbia, C. and J. Domınguez (1992). Boundary elements an introductory course.Boston: WITpress.
Brunskog, J. (2005). The influence of finite cavities on the sound insulation of double-plate structures. J. Acoust. Soc. Am. 117 (6), 3727–3739.
Brunskog, J. and P. Davidsson (2004). Sound transmission of structures. A finite ele-ment approach with simplified room description. Acta Acust. United Acust. 90 (5),847–857.
Campion, S. and J. Jarvis (1996). An investigation of the implementation of thep-version finite element method. Finite Elem. Anal. Des. 23, 1–21.

232 BIBLIOGRAPHY
Chen, G. and J. Zhou (1992). Boundary element methods. London: Academic press(Computational mathematics and applications).
Chen, L. and D. Schweikert (1963). Sound radiation from arbitrary body. J. Acoust.Soc. Am. 35 (10), 1626–1632.
Chertock, G. (1964). Sound radiation from vibrating surfaces. J. Acoust. Soc.Am. 36 (7), 1305–1313.
Cheung, Y., W. Jin, and O. Zienkiewicz (1991). Solution of Helmholtz equation byTrefftz method. Int. J. Numer. Methods Eng. 32 (1), 63–78.
Ciskowski, R. and C. Brebbia (1991). Boundary element methods in acoustics.SouthamptonBoston : Computational Mechanics Publications London New York :Elsevier Applied Science, cop.
Clasen, D. and S. Langer (2007). Finite element approach for flanking transmissionin building acoustics. J. Building Acoustics 14 (1), 1–14.
Clough, R. and J. Penzien (1993). Dynamics of structures. Mc-Graw Hill InternationalEditors.
Cockburn, B. (2003). Discontinuous Galerkin methods. Z. Angew. Math.Mech. 83 (11), 731–754.
Cools, R. (2003). An encyclopedia of cubature formulas. J.Complexity 19 (3), 445–453.
Copley, L. G. (1968). Fundamental results concerning integral representations inacoustic radiation. J. Acoust. Soc. Am. 44 (1), 28–32.
Coyette, J. (1999). The use of finite-element and boundary-element models for pre-dicting the vibro-acoustic behaviour of layered structures. Adv. Eng. Softw. 30,133–139.
Craggs, A. (1971). The transient response of a coupled plate-acoustc system usingplate and acoustic finite elements. J. Sound Vibr. 15 (4), 509–528.
Craggs, A. (1972). The use of simple three-dimensional acoustic finite elements fordetermining the natural modes and frequencies of complex shaped enclosures. J.Sound Vibr. 23 (3), 331–339.
Craggs, A. (1973). An acoustic finite element approach for studying boundary flexi-bility and sound transmission between irregular enclosures. J. Sound Vibr. 30 (3),343–357.

BIBLIOGRAPHY 233
Craik, R. (1996). Sound transmission through buildings using statistical energy anal-ysis. England: Gower.
Craik, R. (2001). The contribution of long flanking paths to sound transmission inbuildings. Appl. Acoust. 62, 29–46.
Craik, R., T. Nightingale, and J. Steel (1997). Sound transmission through a doubleleaf partition with edge flanking. J. Acoust. Soc. Am. 101 (2), 964–969.
Cremer, L., M. Heckel, and E. Ungar (1973). Structure-borne sound. Berlin: Springer-Verlag.
Crispin, C., B. Ingelaere, M. Van Damme, and D. Wuyts (2006). The vibrationreduction index Kij: Laboratory measurements for rigid junctions and for junctionswith flexible interlayers. J. Building Acoustics 13 (2), 99–112.
CTE (2007). Codigo Tecnico de la Edificacion. Documento Basico HR. Proteccionfrente al ruido. (draft, spanish regulation). Technical report, Ministerio de lavivienda.
Cummings, P. and X. Feng (1998). Domain decomposition methods for a systemof coupled and elastic Helmholtz equations. In 11th International conference ondomain decomposition methods (www.ddm.org), Greenwich (England).
Danial, A. and J. Doyle (1992). Spectral analysis of wave motion in plane solids withboundaries. J. Vib. Acoust.-Trans. ASME 114, 133–140.
Danial, A. and J. Doyle (1995). Transverse impact of a damped plate near a straightedge. J. Vib. Acoust.-Trans. ASME 117, 103–108.
Danial, A., J. Doyle, and S. Rizzi (1996). Dynamic analysis of folded plate structures.J. Vib. Acoust.-Trans. ASME 118, 591–598.
Davidsson, P. (2004, August). Structure-acoustic analysis; finite element modellingand reduction methods. Ph. D. thesis, Division of Structural Mechanics, LTH, LundUniversity, Sweden, Box 118, SE-221 00 Lund, Sweden.
Davidsson, P., J. Brunskog, P. Wernberg, G. Sandberg, and P. Hammer (2004). Anal-ysis of sound transmission loss of double-leaf walls in the low-frequency range usingthe finite element method. J. Building Acoustics 11 (4), 239–257.
Davy, J. (1991). Predicting the sound insulaion of stud walls. In A. Lawrence (Ed.),Proceedings Inter-Noise 91, Sydney, pp. 251–254. Australian acoustical society.

234 BIBLIOGRAPHY
De Bel, E., P. Villon, and P. Bouillard (2004). Forced vibrations in the mediumfrequency range solved by a partition of unity method with local information. Int.J. Numer. Methods Eng. 62 (9), 1105–1126.
Delany, M. and E. Bazley (1970). Acoustic properties of fibrous absorbent materials.Appl. Acoust. 3, 105–116.
Deraemaeker, A., I. Babuska, and P. Bouillard (1999). Dispersion and pollution ofthe FEM solution for the Helmholtz equation in one, two and three dimensions.Int. J. Numer. Methods Eng. 46, 471–499.
Desmet, W. (2002). Mid-frequency vibro-acoustic modelling: challenges and potentialsolutions. In I. procedings. (Ed.), International conference on noise and vibrationengineering, Leuven, pp. 835–862.
Desmet, W., B. van Hal, P. Sas, and D. Vandepitte (2002). A computationally efficientprediction technique for the steady-state dynamic analysis of coupled vibro-acousticsystems. Adv. Eng. Softw. 33 (7–10), 527–540.
Domınguez, J. (1993). Boundary elements in dynamics. Southampton Boston: Com-putational mechanics publications and Elsevier applied science.
Doyle, J. (1997). Wave propagation in structures: spectral analysis using fast discretefourier transforms. New York: Springer.
Doyle, J. (2000). Application of the spectral element method to acoustic radiation.In NASA/CR-2000-210642, Purdue University, West Lafayette, Indiana.
Duster, A. (2001, June). High order finite elements for three-dimensional, thin-wallednonlinear continua. Ph. D. thesis, Technische Universitat Munchen.
EDF (2007). Code-aster home page. http://www.code-aster.org.
EN-12354 (1999-2000). Building Acoustics: Estimation of the acoustic performanceof buildings from the performance of elements. (Acoustique du batiment: Calcul dela performance acustique des batiments a partir de la performance des elements).Technical Report 1–4.
Esteban, A., A. Cortes, M. Villot, and C. Martin (2003). Vibration reduction indexKij in hollow constructions: application of the european standard EN-12354 to thespanish constructions. In Tecniacustica, Bilbao.
Esteban, A., M. Cortes, M. Fuente, and S. Arines (2006). On the paradox of brickinfluence on vertical sound insulation. In Euronoise proceedings, Tampere (Finland).

BIBLIOGRAPHY 235
Everstine, G. (1997). Finite element formulations of structural acoustics problems.Comput. Struct. 65 (3), 307–321.
Fahy, F. (1989). Sound and structural vibration. London: Academic Press.
Fahy, F. (1994). Statistical energy analysis: a critical overview. Philosophical trans-actions of the royal society of London 346, 429–554.
Farhat, C., I. Harari, and U. Hetmaniuk (2003). A discontinuous Galerkin methodwith Lagrange multipliers for the solution of Helmholtz problems in the mid-frequency regime. Comput. Methods Appl. Mech. Eng. 192, 1389–1419.
Farhat, C., A. Macedo, and M. Lesoinne (2000). A two-level domain decompositionmethod for the iterative solution of high frequency exterior Helmholtz problems.Numer. Math. 85, 283–308.
Farhat, C., A. Macedo, M. Lesoinne, F. Roux, F. Magouls, and A. de La Bourdonnaie(2000). Two-level domain decomposition methods with Lagrange multipliers forthe fast iterative solution of acoustic scattering problems. Comput. Methods Appl.Mech. Eng. 184, 213–239.
Fausti, P., R. Pompoli, and R. Smith (1999). An intercomparison of laboratory mea-surements of airborne sound insulation of lightweight plasterboard walls. J. BuildingAcoustics 6 (2), 127–140.
Feng, X. (1998). Interface conditions and non-overlapping domain decompositionmethods for a fluid-solid interaction problem. Cont.Math. 218.
Feng, X. and Z. Xie (1999). Domain decomposition methods for a coupled vibra-tion between an acoustic field and a plate. In T. Chan, T. Kako, H. Kawarada,and O. Pironneau (Eds.), 12th International conference on domain decompositionmethods (www.ddm.org), Chiba (Japan).
Fernandez-Mendez, S. (2001, September). Mesh-free methods and finite elements:friend or foe? Ph. D. thesis, U.P.C.
Fischer, M. (2006, April). Seminar: Vibrations and structure-borne sound in civilengineering - theory and applications. Technical report, Joint advanced studentschool, St. Petersburg.
Fothergill, L. (1980). Case studies of attempts to improve the sound insulation betweendwellings. Appl. Acoust. 13, 291–311.
Free-Field-Technologies (2007). Actran home page. http://www.fft.be.

236 BIBLIOGRAPHY
Gagliardini, L., J. Roland, and J. Guyader (1991). The use of a functional basis tocalculate acoustic transmission between rooms. J. Sound Vibr. 145 (3), 457–478.
Galbrun, L. (2007). The prediction of airborne sound transmission between two roomsusing first-order flanking paths. Appl. Acoust., ‘Accepted’.
Gerretsen, E. (1979). Calculation of the sound transmission between dwellings bypartitions and flanking structures. Appl. Acoust. 12 (6), 413–433.
Gerretsen, E. (1986). Calculation of airborne and impact sound insulation beteendwellings. Appl. Acoust. 19 (4), 245–264.
Geuzaine, C. and J. Remacle (2007). Gmsh reference manual.http://www.geuz.org/gmsh/.
Gomperts, M. (1977). Sound radiation from baffled, thin, rectangular plates. Acus-tica 37, 93–102.
Gopalakrishnan, S. (2000). A deep rod finite element for structural dynamics andwave propagation problems. Int. J. Numer. Methods Eng. 48, 731–744.
Gopalakrishnan, S. and J. Doyle (1995). Spectral super-elements for wave propagationin structures with local non-uniformities. Comput. Methods Appl. Mech. Eng. 121,77–90.
Green, D. and C. Sherr (1982a). Sound transmission loss of gypsum wallboard parti-tions. Report 1. Untilled steel stud partitions. J. Acoust. Soc. Am. 71 (1), 90–96.
Green, D. and C. Sherr (1982b). Sound transmission loss of gypsum wallboard par-titions. Report 2. Steel stud partitions having cavities filled with glass fiber batts.J. Acoust. Soc. Am. 71 (4), 902–907.
Grosh, K. and P. Pinsky (1998). Galerkin generalized least squares finite elementmethods for time-harmonic structural acoustics. Comput. Methods Appl. Mech.Eng. 154 (3–4), 299–318.
Guddati, M. and B. Yue (2004). Modified integration rules for reducing dispersionerror in finite element methods. Comput. Methods Appl. Mech. Eng. 193 (3–5),275–287.
Guigou, C. and M. Villot (2003). Modelling of sound transmission through lightweightelements with stiffeners. J. Building Acoustics 10 (3), 193–209.
Guigou-Carter, C., M. Villot, and R. Wetta (2006). Prediction method adapted towood frame lightweight constructions. J. Building Acoustics 13 (3), 173–188.

BIBLIOGRAPHY 237
Guyader, J., C. Boisson, C. Lesueur, and P. Millot (1986). Sound transmission bycoupled structures: application to flanking transmission in buildings. J. SoundVibr. 106 (2), 289–310.
Harari, I. (1997). Reducing spurious dispersion, anisotropy and reflection in fi-nite element analysis of time-harmonic acoustics. Comput. Methods Appl. Mech.Eng. 140 (1–2), 39–58.
Harari, I. and T. Hughes (1992). A cost comparison of boundary element and finiteelement methods for problems of time-harmonic acoustics. Comput. Methods Appl.Mech. Eng. 97 (1), 77–102.
Hesthaven, J. and T. Warburton (2002). Nodal high-order methods on unstructuredgrids I. Time-domain solution of Maxwells equations. J. Comput. Phys. 181, 186–221.
Hongisto, V. (2000, December). Airborne sound insulation of wall structures - mea-surement and prediction methods. Ph. D. thesis, Department of electrical and com-munications engineering, Helsinki University of technology.
Hongisto, V. (2001). A case study of flanking transmission through double structures.Appl. Acoust. 62, 589–599.
Hongisto, V. (2006). Sound insulation of double panels - comparison of existingprediction models. Acta Acust. United Acust. 92, 61–78.
Hongisto, V., M. Lindgren, and R. Helenius (2002). Sound insulation of double walls- an experimennntal parametric study. Acta Acust. United Acust. 88, 904–923.
Hopkins, C. (1997). Sound transmission across a separating cavity wall constructionand flanking. Appl. Acoust. 52 (3–4), 259–272.
Hopkins, C. (1999). Measurement of the vibration reduction index, Kij on free-standing masonry wall constructions. J. Building Acoustics 6 (3–4), 235–257.
Houmat, A. (2005). Free vibration analysis of membranes using the hp version of thefinite element method. J. Sound Vibr. 282, 401–410.
Houmat, A. (2006). Free vibration analysis of arbitrarily shaped membranes usingthe trigonometric p-version of the finite-element method. Thin-Walled Struct. 44,943–951.
Huerta, A., T. Belytschko, S. Fernandez-Mendez, and T. Rabczuc (2004). Ency-clopedia of computational mechanics, Volume 1, Chapter Meshfree methods, pp.279–309. Wiley.

238 BIBLIOGRAPHY
Hughes, T. (1987). The finite element method : linear static and dynamic finiteelement analysis. Prentice-Hall International.
Hunter, P. and A. Pullan (1997). FEM/BEM notes. The university of Auckland:Department of engineering ecience.
Igawa, H., K. Komatsu, I. Yamaguchi, and T. Kasai (2004). Wave propagation analysisof frame structures using the spectral element method. J. Sound Vibr. 227, 1071–1081.
Ihlenburg, F. (1998). Finite element analysis of acoustic scattering. Springer.
Ihlenburg, F. and I. Babuska (1997). Finite element solution of the Helmholtz equationwith high wave number part II: the h-p version of the FEM. SIAM J. Numer.Anal. 34 (1), 315–358.
INRIA and SDTools (2007). OpenFEM home page. http://www-rocq.inria.fr/OpenFEM/.
Jean, P. and J. Roland (2001). Application of the green ray integral method (GRIM)to sound transmission problems. J. Building Acoustics 8 (2), 157–174.
Jean, P. and J. Rondeau (2002). A simple decoupled modal calculation of soundtransmission between volumes. Acta Acust. United Acust. 88, 924–933.
Jean, P., H. Siwiak, and G. Joubert (2006). A decoupled vibro-acoustic developmentof FEM: application to laboratory modelling. J. Building Acoustics 13 (2), 83–98.
Jeyapalan, R. and E. Richards (1979). Radiation efficiencies of beams in flexuralvibration. J. Sound Vibr. 67 (1), 55–67.
Jirousek, J. and M. Stojek (1995). Numerical assessment of a new T-element approach.Comput. Struct. 57 (3), 367–378.
Jirousek, J. and A. Wrolewski (1995). T-elements: a finite element approach withadvantages of boundary solutions methods. Adv. Eng. Softw. 24 (1–3), 71–88.
Jirousek, J. and A. Wrolewski (1996). T-elements: state of the art and future trends.Arch. Comput. Method Eng. 3, 323–434.
Jirousek, J. and A. Zielinski (1997). Survey of Trefftz-type element formulations.Comput. Struct. 63 (2), 225–242.
Josse, R. (1975). La acustica en la construccion. Barcelona: Gustavo Gili.
BIBLIOGRAPHY 239
Josse, R. and C. Lamure (1964). Transmission du son par une paroi simple. Acus-tica 14, 266–280.
Junger, M. (1997). Acoustic fluid-elastic structure interactions: basic concepts. Com-put. Struct. 65 (3), 287–293.
Kang, Y. and J. Bolton (1996). A finite element model for sound transmission throughfoam-lined double-pannel structures. J. Acoust. Soc. Am. 99 (5), 2755–2765.
Kernen, U. and O. Hassan (2005). Airborne sound insulation of a thin plate of finitedimensions. Acta Acust. United Acust. 91 (4), 732–739.
Kesti, J., S. Hicks, J. Rackham, J. Widman, M. Villot, C. Guigou, A. Rodrıguez-Ferran, J. Poblet-Puig, P. Sipari, A. Talja, F. Ljunggren, and A. Agren (2006). HighQuality Acoustic and Vibration Performance of Lightweight Steel ConstructionsAcousvibra (Final Report). Technical report, Research Programme of the ResearchFund for Coal and Steel Steel.
Kinsler, L., A. Frey, and A. Coppens (1990). Fundamentals of acoustics. Noriegaeditores.
Kirkup, S. (2007). The boundary element method in acoustics.
Kita, E. and N. Kamiya (1995). Trefftz method: an overview. Adv. Eng. Softw. 24 (1–3), 3–12.
Koizumi, T., N. Tsujiuchi, H. Tanaka, M. Okubo, and M. Shinomiya (2002). Predic-tion of the vibration in buildings using statistical energy analysis. In Proceedingsof the 20th international modal analysis conference (IMAC), Los Angeles.
Kropp, W. and E. Rebillard (1999). On the air-borne sound insulation of double wallconstructions. Acta Acust. United Acust. 85, 707–720.
Kuttruff, H. (1979). Room Acoustics. London: Aplied science editors.
Lacroix, V., P. Bouillard, and P. Villon (2003). An iterative defect-correction typemeshless method for acoustics. Int. J. Numer. Methods Eng. 57, 2131–2146.
Larsson, H. and L. Tunemalm (1998). Innovative acoustic studs for interior and exte-rior walls. In The International Conference on Steel in Green Building Construction- Sustainable Steel, Orlando, USA. From Swedish Institute of Steel Construction.
Lee, U. (2000). Vibration analysis of one-dimensional structures using the spectraltransfer matrix method. 22, 681–690.

240 BIBLIOGRAPHY
Lee, U. and J. Lee (February 1999). Spectral-element method for levy-type platessubject to dynamic loads. J. Eng. Mech.-ASCE , 243–247.
Leung, A., B. Zhu, J. Zheng, and H. Yang (2004). Analytic trapezoidal Fourierp-element for vibrating plane problems. J. Sound Vibr. 271, 67–81.
Liu, G. (2003). Mesh free methods. Moving beyond the finite element method. CRCPress.
London, A. (1950). Transmission of reverberant sound through double walls. J.Acoust. Soc. Am. 22 (2), 270–279.
Maluski, S. and B. Gibbs (2000). Application of a finite-element model to low-frequency sound insulation in dwellings. J. Acoust. Soc. Am. 108 (4), 1741–1751.
Maluski, S. and B. Gibbs (2004). The effect of construction material contents androom geometry on the sound field in dwellings at low frequencies. Appl. Acoust. 65,31–44.
Mandel, J. (2002). An iterative substructuring method for coupled fluid-solid acousticproblems. J. Comput. Phys. 177 (1), 95–116.
Mathur, G. P., C. L. Chin, M. A. Simpson, and J. T. Lee (2001, November). Structuralacoustic prediction and interior noise control technology. Technical report, TheBoeing Company, Long Beach, California.
Melo, G., B. Gibbs, and S. Maluski (2002). Finite element model of absorbent furni-ture in small rooms at low frequencies. In 9th International congress on sound andvibration.
Metzen, H. (1999). Accuracy of CEN-prediction models applied to german buildingsituations. J. Building Acoustics 6 (3–4), 269–288.
Milovanovic, G. (1998). Numerical calculation of integrals involving oscillatory andsingular kernels and some applications of quadratures. Comput. Math. Appl. 36 (8),19–36.
Mohan, P. (1997, November). Development and applications of a flat triangular el-ement for thin laminated shells. Ph. D. thesis, Faculty of Virginia polytechnicinstitute. Aerospace engineering., Blacksburg, Virginia.
Morand, J. and R. Ohayon (1992). Interactions fluides-structures. Paris: Masson.
Mulholland, K. and R. Lyon (1973). Sound insulation at low frequencies. J. Acoust.Soc. Am. 54 (4), 867–878.

BIBLIOGRAPHY 241
Mulholland, K., H. Parbrook, and A. Cummings (1967). The transmission los ofdouble panels. J. Sound Vibr. 6 (3), 324–334.
Nashif, A., D. Jones, and J. Henderson (1985). Vibration Damping. Wiley.
Nightingale, T. (1995). Application of the CEN draft building acoustics predictionmodel to a lightweight double leaf construction. Appl. Acoust. 46 (3), 265–284.
Novak, R. (1992). Sound insulation of lightweight double walls. Appl. Acoust. 37,281–303.
Ochmann, M. and F. Mechel (2002). Analyticl and numerical methods in acoustics.Springer–Verlag.
Ohayon, R. and C. Soize (1998). Structural acoustics and vibration. Academic press.
Ozgener, B. and H. Ozgener (2000). Gaussian quadratures for singular integrals inBEM with applications to the 2D modified Helmholtz equation. Eng. Anal. Bound.Elem. (24), 259–269.
Palermo, L. (2007). On the harmonic response of plates with the shear deformationeffect using the elastodynamic solution in the boundary element method. Eng.Anal. Bound. Elem. 31, 176–183.
Panneton, R. and N. Atalla (1996). Numerical prediction of sound transmissionthrough finite multilayer systems with poroelastic materials. J. Acoust. Soc.Am. 100 (1), 346–354.
Panneton, R. and N. Atalla (1997). An efficient finite element scheme for solving thethree-dimensional poroelasticity problem in acoustics. J. Acoust. Soc. Am. 101 (6),3287–3298.
Partridge, P., C. Brebbia, and L. Wrobel (1992). The Dual reciprocity boundaryelement method. SouthamptonLondon : Computational Mechanics Publication-sLondonNew York : Elsevier Applied Science.
Pedersen, D. (1995). Estimation of vibration attenuation through junctions of buildingstructures. Appl. Acoust. 46 (3), 285–305.
Pedersen, D. (1999). Evaluation of en 12354 part 1 and 2 for nordic dwelling houses.J. Building Acoustics 6 (3–4), 259–268.
Petersen, S., D. Dreyer, and O. von Estorff (2006). Assessment of finite and spec-tral element shape functions for efficient iterative simulations of interior acoustics.Comput. Methods Appl. Mech. Eng. 195 (44–47), 6463–6478.

242 BIBLIOGRAPHY
Pierce, A. (1981). Acoustics. An introduction to its physical principles and aplications.New York: McGraw Hill.
Pluymers, B., W. Desmet, D. Vandepitte, and P. Sas (2003). On the use of a wavebased prediction technique for steady-state structural-acoustic radiation analysis.
Pluymers, B., W. Desmet, D. Vandepitte, and P. Sas (2004). Application of anefficient wave-based prediction technique for the analysis of vibro-acoustic radiationproblems. 168, 353–364.
Pluymers, B., A. Hepberger, W. Desmet, H. Priebsch, D. Vandepitte, and P. Sas(2003). Experimental validation of the wave based prediction technique for theanalysis of the coupled vibro-acoustic behaviour of a 3D cavity. In Second MITConference on Solid and Fluid Mechanics (MIT2), Boston, Massachusetts, USA,pp. 1483 – 1487.
Poblet-Puig, J. and A. Rodrıguez-Ferran (2008). The block Gauss-Seidel methodin sound transmission problems. Submitted for publication to the Int. J. Numer.Methods Engng..
Providakis, C. and D. Beskos (1989). Free and forced vibrations of plates by boundaryelements. Comput. Methods Appl. Mech. Eng. 74, 231–350.
Ramakrishnan, J. and L. Koval (1987). A finite element model for sound transmissionthrough laminated composite plates. J. Sound Vibr. 112 (3), 433–446.
Ramesh, P. and M. Lean (1991). Accurate integration of singular kernels in boundaryintegral formulations for Helmholtz equation. Int. J. Numer. Methods Eng. 31,1055–1068.
Rizzi, S. and J. Doyle (1992). A spectral element approach to wave motion in layeredsolids. J. Vib. Acoust.-Trans. ASME 114, 569–577.
Saad, Y. (2000). Iterative methods for sparse linear systems. http://www-users.cs.umn.edu/˜saad/books.html.
Schmitz, A., A. Meier, and G. Raabe (1999). Inter-laboratory test of sound insulationmeasurements on heavy walls: Part I – Preliminary test. J. Building Acoustics 6 (3–4), 159–169.
Shaw, R. (1988). Integral equation methods in acoustics. In C. Brebbia (Ed.), Bound-ary elements X, pp. 221–244.
Smith, S. (1997). The scientist and engineer’s guide to digital signal processing. SanDiego: California technical publishing.

BIBLIOGRAPHY 243
Solaroli, G., Z. Gu, A. Baz, and M. Ruzzene (2003). Wave propagation in periodicstiffened shells: spectral finite element modelling and experiments. J. Vib. Con-trol 9, 1057–1081.
Spetch, B. (1988). Modified shape functions for the three-node plate bending elementpassing the patch test. Int. J. Numer. Methods Eng. 26, 705–715.
Stifkens, F. (1995, August). Elements finis en acoustique. Technical Report Manuelde reference R4.02.01, Electricite de France (EDF), Avenue du general de Gaulle –BP 408 – F92141 Clamart CEDEX.
Stojek, M. (1998). Least-squares Trefftz-type elements for the Helmholtz equations.Int. J. Numer. Methods Eng. 41 (5), 831–849.
Suleau, S., A. Deraemaeker, and P. Bouillard (2000). Dispersion and pollution ofmeshless solutions for the Helmholtz equation. Comput. Methods Appl. Mech.Eng. 190, 639–657.
Suzuki, S., S. Maruyama, and H. Ido (1989). Boundary element analysis of cavity noiseproblems with complicated boundary conditions. J. Sound Vibr. 130 (1), 79–91.
Szudrowicz, B. and A. Izewska (1995). Simplified evaluation of flanking transmissionbased on the mean mass and mean area of flanking elements. Appl. Acoust. 46 (3),307–317.
Takahashi, D. (1995). Effects of panel boundedness on sound transmission problems.J. Acoust. Soc. Am. 98 (5), 2598–2606.
Thompson, L. and P. Pinsky (1995). A Galerkin least-squares finite element methodfor the two-dimensional Helmholtz equation. Int. J. Numer. Methods Eng. 38 (3),371–397.
Tisseur, F. and K. Meerbergen (2001). The quadratic eigenvalue problem. SIAMRev. 43 (2), 235–286.
van Zyl, B., P. Erasmus, and G. van der Merwe (1986). Determination of soundreduction indices in the presence of flanking transmission. Appl. Acoust. 19, 25–39.
Vanmaele, C., W. Desmet, and D. Vandepitte (2003). A wave based prediction tech-nique for the steady-state dynamic analysis of three-dimensional plate structures.In Tenth international congress on sound and vibration, Stockholm (Sweden).
Villot, M. (2002). Modeling flanking transmissions in lightweight constructions. InForum acusticum, Sevilla.

244 BIBLIOGRAPHY
Villot, M., C. Guigou, and L. Gagliardini (2001). Predicting the acoustical radiationof finite size multi-layered structures by applying spatial windowing on infinitestructures. J. Sound Vibr. 245 (3), 433–455.
Von Estorff, O. (2000). Boundary element in acoustics: advances and applications.Wit Press.
Wallace, C. (1970). Radiation resistance of a rectangular panel. J. Acoust. Soc.Am. 51 (3), 946–952.
Wandzura, S. and H. Xiao (2003). Symmetric quadrature rules on a triangle. Comput.Math. Appl. 45, 1829–1840.
Wang, J., T. Lu, J. Woodhouse, R. Langley, and J. Evans (2005). Sound transmis-sion through lightweight double-leaf partitions: theoretical modelling. J. SoundVibr. 286 (4–5), 817–847.
Warburton, T., S. Sherwin, and G. Karniadakis (1999). Basis functions for triangularand quadrilateral high-order elements. SIAM J. Sci. Comput. 20 (5), 1671–1695.
Wu, T. and A. Dandapani (1994). A boundary element solution for sound transmissionthrough thin panels. J. Sound Vibr. 171 (2), 145–157.
Yu, C. and J. Roesset (2001). Dynamic stiffness matrices for linear members withdistributed mass. Tamkang journal of science and engineering 4 (4), 253–264.
Yue, B. and M. Guddati (2005). Dispersion-reducing finite elements for transientacoustics. J. Acoust. Soc. Am. 118 (4), 2132–2141.
Zhaohui, Q., D. Kennedy, and F. Williams (2004). An accurate method for tran-scendental eigenproblems with a new criterion for eigenfrequencies. Int. J. SolidsStruct. 41, 3225–3242.
Zienkiewicz, O. (2000). Achievements and some unsolved problems of the finite ele-ment method. Int. J. Numer. Methods Engng. 47, 9–28.
Zienkiewicz, O. and R. Taylor (2000). The finite element method. Butterworth-Heinemann.