object identification using mobile devices
TRANSCRIPT

Measurement 51 (2014) 100–111
Contents lists available at ScienceDirect
Measurement
journal homepage: www.elsevier .com/ locate /measurement
Object identification using mobile devices
http://dx.doi.org/10.1016/j.measurement.2014.01.0290263-2241/� 2014 Elsevier Ltd. All rights reserved.
⇑ Corresponding author at: Department of Civil Engineering, ShantouUniversity, Guangdong, PR China. Tel./fax: +86 75482904748.
E-mail address: [email protected] (L.-H. Juang).
Li-Hong Juang a,b,⇑, Ming-Ni Wu c, Zhi-Zhong Weng c
a Department of Civil Engineering, Shantou University, Guangdong, PR Chinab The Key Lab of Digital Signal and Image Processing of Guangdong Province, Shantou University, Guangdong, PR Chinac Department of Information Management, National Taichung University of Technology, Taichung, Taiwan, ROC
a r t i c l e i n f o a b s t r a c t
Article history:Received 20 September 2013Received in revised form 17 December 2013Accepted 20 January 2014Available online 28 January 2014
Keywords:Object recognitionTextureColor featuresVector distanceMobile phone
To detect object from complex background, illumination variations and texture by machineis very difficult but important for adaptive information service. In this research, we presenta preliminary design and experimental results of object recognition from a mobile devicethat utilizes the texture and the color features by image pre-processing with a simple vec-tor distance matching classifier to train and extract the characteristics. The result showsthat the proposed method can adopt the few characteristic values and the accuracy canreach up to 100% of object identification rate when making a querying in a mobile phone.The Euclidean distance is also used to represent the object similarity. The similarity canreach 87.5%, 62.5%, 75% and 87.5% respectively.
� 2014 Elsevier Ltd. All rights reserved.
1. Introduction wander out, the identification system [7–16] will can early
Digital product development has make many of benefitson human life and convenience in information technology.If the identification system in a department store or easystore entrance can accurately distinguish between the dif-ferent type products, we will be able to provide customerswith more convenient and friendly service. Think about it,if the service system can identify the object and its charac-teristics, then provides personal service for the differentobject, which can reduce the time when customer searchesfor products. In the other hand, it will also make the cus-tomer feel very intimate and accelerate the service for theirguests, finally it will make the company’s performanceincreasing. An object identification system [1–6] can alsobe developed into the security monitor system due to to-day social security letting people panic, more public toiletsare located in the corner place, and its security let peopleworried. If the monitored system can be stalled in toiletor outside locker room, when some specific strangers
notify guards or the related people to handle it, so that canreduce to guard 24 h patrol and also has a protection onthe social security aspects.
Object identification is an important research at pres-ent. In the early, object identification studies were mostlyfocused on face or the profile feature such as gender[17–28], but in the monitor system the face image has alow resolution or other factors lead to a lower recognitionrate. In this research, we will propose a preliminary designand experimental results of object recognition from mobiledevice that utilizes the texture and the color features witha simple vector distance matching classifier to training andextract the characteristics. This paper uses the object data-base set [1–3] as an experimental basis, and then uses asimple vector distance matching classifier as an objectidentification source. We found that the proposed methodcan reduce the waiting time of mobile devices when usersquery because of the less feature vector data and the sim-ple vector distance operation. They will help for the objectidentification according to these characteristics.
In the past, a lots of researchers majored on how tocombine the image features with the histogram to identifyimage features [29–35]. However, different users have

Fig. 1. HSV color attribute.
Fig. 2. The micro structure detection processing.
Fig. 3. The edge pixel similarity judgment.
Fig. 4. The four kinds of judgme
L.-H. Juang et al. / Measurement 51 (2014) 100–111 101
different perspectives. In this research, our topic is to solvehow to find out a specific object rapidly. In this research,we used two characteristics of feature extract and featurecomparison for image retrieval. In the feature extract part,we add the color feature information. Because there waslots of researchers in the past, they only adopted gray im-age or binary image, which cannot represent more detailinformation for image. Therefore, we first transformedRGB color space to HSV color space, after this processing,we quantized it to 72 color numeric which can be usedfor an object recognition on the mobile. In the feature com-parison part, in order to let every user can take photos byhis perspectives, we need first to find out the object’s masscenter then transform the centroid into the polar coordi-nates. Using this method, it can solve the image rotationproblem in this object identification. In the experiment,we will transform the original photos into shift (left andright), shrink and rotation ones. Finally, we used Euclideandistance to represent the object similarity. The accuracycan reach up to 100% for the above four deformation cases.The similarity can reach 87.5%, 62.5%, 75% and 87.5%respectively. Eventually, this research has a high accuracyfor different angles, sizes and directions. In the following,we will develop the procedure as follows.
2. The procedure of the image processing technique
This research uses some image processing techniquesfor object features extraction, and then bases on the tex-ture and the color features by using the micro structurefeature as an important characteristic reference for objectidentification. The procedure includes the five steps. Thefirst step uses HSV color space to deal RGB transformation.The second step uses the micro structure technique to ex-tract its feature image. The third step bases on the previoustwo steps to separate them from their similarity variance.The fourth step makes characteristic comparisons fromthese variances. The fifth step uses a simple vector distancematching classifier to train and extract the characteristics,then recognize the queried object. They are explained asfollows:
2.1. HSV color space
This paper bases on HSV image as shown in Fig. 1 beingas object identification from the original data. In this imageprocess procedure, HSV color-level process was used toconvert a RGB color image to an intensity color-level im-age. Usually, intensity V, saturation S and hue H can be
nts for their focal points.

Fig. 5. The similar pixel merger.
Fig. 6. The system processing flowchart.
102 L.-H. Juang et al. / Measurement 51 (2014) 100–111
used for RGB to HSV color-level converting which can beexpress as [2]
H ¼6þ G�B
MAX�MIN
� �� 60�; if R ¼ MAX
2þ B�RMAX�MIN
� �� 60�; if G ¼ MAX
4þ R�GMAX�MIN
� �� 60�; if B ¼ MAX
8><>: ð1Þ
Fig. 7. The process for the m
S ¼ MAX �MINMAX
ð2Þ
V ¼ MAX255
ð3Þ
where MAX = max(R,G,B) and MIN = min(R,G,B) representthe maximal value and the minimal value in the RGB colorspace respectively. The hue H value range is 0–360�, thesaturation S value range is 0–100%, the lower value be-comes more gray level, and the intensity V value range isalso 0–100%. In this research, we chose to use HSV colorspace in order to reduce the feature number and also re-duce the effects of chromatic aberration on image, there-fore H is divided into 8 sections, S has 3 sections and Vhas also 3 sections, then the total is 72 colors.
2.2. Micro structure
The researcher [11] proposed a capturing image methodbased on the micro structure characteristics, and his mainconcept is to use the relationships between texture to de-tect whether there are the same point within a particularregion and its process is shown in Fig. 2. The processingsteps are described as follows:
Step A: When the change for the axial X and Y of gradi-ent information is acquired, first of all, we use Eqs. (4)–(8) to calculate the angle h between the two vectorsa H00x ; S
00x ;V
00x
� �and b H00y; S
00y;V
00y
� �as follows:
jaj ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiH00x� �2 þ S00x
� �2 þ V 00x� �2
qð4Þ
jbj ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
H00y� �2
þ S00y� �2
þ V 00y� �2
rð5Þ
erger of similar pixel.

Fig. 8. The histogram statistics.
Fig. 9. The horizontal turn over.
L.-H. Juang et al. / Measurement 51 (2014) 100–111 103
ab ¼ H00xH00y þ S00xS00y þ V 00xV 00y ð6Þ
Cosðda; bÞ ¼ abjajjbj ð7Þ
h ¼ Cos�1ðda; bÞ ¼ Cos�1 abjaj � jbj
� �ð8Þ
where a H00x ; S00x ;V
00x
� �and b H00y; S
00y;V
00y
� �are these pixel
value for hue H, saturation S and intensity V with dou-ble rotation at X and Y directions.Step B: When the included angle value is obtained, thenwe use it to calculate the property of edge image tocheck if they are similar. Meanwhile, we set the 30� asone unit and split into 6 intervals (the value is 0–5).In the case, a video with a deviation of shooting angle
Fig. 10. The vertical turn over.
will not affect on their comparison features. Fig. 3(a)shows the calculation results for this step scope.Step C: Here we judge these points with the same pixelvalue in the particular region and compare the sur-rounding points with the center point, and then leavethe same, otherwise delete them. For example, the pixelvalue of Fig. 3(b)’s focal point is 2 and is surrounded bythe other eight pixels, and its above and its right arealso 2, therefore we only keep these three pixel dataas shown in Fig. 3(c).Step D: After step C processing, we reserve the outlinewhich their pixel values are same with the center pointas shown in Fig. 3(d). Meanwhile, we extend the com-parison rule to the other reference points to do thesame operation for the bigger image size as shown inFig. 4. Its image size is 6 � 6 pixels, and we cut it intothe four 3 � 3 Blocks as shown in Fig. 4(a). After usingstep B and step C operations to process Fig. 4(a), theinterval information block is formed as shown inFig. 5(a). Furthermore, we shift the four blocks inFig. 4(a) to the right, the down and the right down byone1X3 block location respectively as shown inFig. 4(b), (c) and (d)’s block cutting position. Meanwhilestep B and step C operations are used again to obtainthe results as shown in Fig. 5(b), (c) and (d) respec-tively. Finally we merger these four cutting operationblocks to form the shaded pixel part, then acquire thecharacteristic pixel location as shown in Fig. 5(e),the characteristic pixel location will be recorded bythe final merger pixel value.
Fig. 11. (a) The first column pixel shift, and (b) the second-fifth columnsforward shift.

Fig. 12. The trained image database.
Fig. 13. The test image database examples.
104 L.-H. Juang et al. / Measurement 51 (2014) 100–111

Table 1The original image querying accuracy.
Original image Accuracy (%)
Correct number 16 100Similar number Top 3 (10) 100
Table 2The left shifted image querying accuracy.
Original image Accuracy (%)
Correct number 16 100Similar number Top 3 (4) 100
Table 3The right shifted image querying accuracy.
Original image Accuracy (%)
Correct number 16 100Similar number Top 3 (5) 100
Table 4The shrunk image querying accuracy.
Original image Accuracy (%)
Correct number 16 100Similar number Top 3 (12) 100
Table 5The rotated image querying accuracy.
Original image Accuracy (%)
Correct number 128 100Similar number Top 3 (10) 100
L.-H. Juang et al. / Measurement 51 (2014) 100–111 105
2.3. Characteristic extraction
In this research, the characteristic extraction process isdivided into six major steps shown in Fig. 6, the followingis their procedure description:
Step A: A RGB color space image is converted by Eqs.(1)–(3) into HSV color space image, then each pixel(R,G,B) in this image is mapped to (H,S,V).Step B: (H,S,V) of each pixel will be quantified into 72colors as the above description (H,S,V) are separatedinto three kind levels of 8, 3, and 3, and the quantitativeresults become (H0,S0,V0). Therefore it can reduce thetime complexity of image processing and improve thetoughness of color identification, Fig. 7(a) shows thequantitative results for this example.Step C: We convert (H0,S0,V0) by Eqs. (9)–(11) into theplane coordinate and its conversion result is ðH00; S00;V 00Þ.
H00 ¼ S � cosH0 ð9Þ
S00 ¼ S � sinH0 ð10Þ
V 00 ¼ V 0 ð11Þ
Step D: Using Sobel edge detection [3] for the pixel val-ues in the converted plane coordinates calculates thehorizontal as well as the vertical gradient value, thenuses the Eqs. (12), and (13) for the shielding edge detec-tion and the upper left corner image is the startingpoint, then from the pixels of left to right and top tobottom in the entire image will use the shield operationin order to acquire the direction change gradient [5] inX direction, ðH00x ; S
00x ;V
00xÞ, and Y direction, ðH00y; S
00y;V
00yÞ, and
Fig. 14. The extracted feature image example.

Fig. 15. The sorting results from the object image querying based on Fig. 12(o).
106 L.-H. Juang et al. / Measurement 51 (2014) 100–111
then the variance between two vectors can be obtainedby the gradual change, meanwhile acquire its vectorangle for the next step.
Gx ¼�1 0 1�2 0 2�1 0 1
264
375 ð12Þ
Gy ¼1 2 10 0 0�1 �2 1
264
375 ð13Þ
Step E: We will detect and capture its characteristics byusing the above micro structure section as shown inFig. 5(e), which will combine with HSV color informa-tion in steps B to get the color value of the micro struc-ture for its image characteristics as shown in Fig. 7.Step F: In this step, first we need to obtain the imagecharacteristic value from its histogram statistics whichare created by computing its frequency distribution ofthe elements in a vector input, its Matlab code is asfollows:
Y ¼ hist½u;n�; ð14Þ
where u is the input vector and n is the number of dis-crete bins. Fig. 7(c) is the results from the numerical cal-culation of the micro structure characteristic value forthe merger of similar pixel. After using the histogram
statistics as shown in Fig. 8, then we can acquire itsimage eigenvector which is for converting the true colorimage into the indexed image as follows:
ðe0;e1; .. .;e71Þ¼ð0;0;0;0;1;1;0;0;0;0;1;1;0;2;0;1;0;1;1;0;0;1;1;1;1;3;1;0;0;0;0;1;0;0;0;1;1;0;0;1;0;0;0;0;0;0;0;1;2;4;0;0;2;1;0;1;0;0;0;1;0;0;0;0;0;0;0;0;1Þ
2.4. Feature comparisons
In addition to the previous method for the feature com-parison using the original image characteristics, we alsoproposed the other three methods for the feature compar-ison including the horizontal flipping, vertical flipping andpixel shifting. For the horizontal and vertical flipping sec-tion, first we need to find its images symmetry axis, thenmake a mirror reversion as shown in Fig. 9(a) for the origi-nal image characteristics and in Fig. 9(b) for the result fromthe mirror reversion of perpendicular to the symmetryaxis. Similarly, Fig. 10(a) is for the original image charac-teristics and Fig. 10(b) is for the result from the mirrorreversion of horizontally to the symmetry axis. For the pix-el shifting section, as shown in Fig. 11(a), the first columnpixels move to the last column pixels, the second columnpixels are forward to the remaining original columns asshown in Fig. 11(b) and so on. We will shift a bar in eachtime and a total of five kinds of shiftings are used.

Fig. 16. The sorting results from the left shifted object image querying based on Fig. 12(o).
L.-H. Juang et al. / Measurement 51 (2014) 100–111 107
3. Experiment test
In this research, we use an image database for theexperiment tests which have a total of 16 serial objectimages as shown in Fig. 12(a)–(p) for the classificationtests, their image sizes are 342 � 256 pixels. The test imagedatabase examples include the shrunk, shifted and rotatedimages from the original image database as shown inFig. 13(a)–(l). The rotated images include a total of eightrotated angles and the shrunk image size is a half of origi-nal size, 171 � 128 pixels, the others are same size in thistest image database. The test database has a total of 16shrunk images, a total of 32 shifted images including cen-ter-left and center-right, the original image database has16 images and together the rotated images consist a totalof 8 � 16 = 128 images, therefore the test image databasehas a total of 192 images. The training image databasehas a total of 12 distortion situation images as shown inFig. 13(a)–(l). In this figure, (a) is an example of the originalimage, (b) is an example of the shrunk image, (c) is anexample of the left shifted image, (d) is an example ofthe right shifted image, and (e) to (l) are all examples ofthe rotated images for 0� (360�), 45�, 90�, 135�, 180�,225�, 270� and 315� respectively. In this experiment, weused a histogram statistics to analyze the extracted textureand the color information from these objects to test theiraccuracy. We adopted 6 characteristic values for their
texture features. We also adopted HSV processing of 72quantized colors for their color features. Then we usedEuclidean distance to calculate the similarity betweentwo objects as Eq. (15), finally we can present the mostsimilar objects according to the descending sorting.
Eðp; qÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXn
i¼1ðpi � qiÞ
2q
ð15Þ
where p and q are for the database and the querying imagerespectively, i is the statistic number of histogram in eachsection and n is the total statistic numbers.
Fig. 14(a)–(i) shows the results for the extracted featureimage example, we can see the objects maintaining theircolor and texture feature information without change.The acquired accuracy rate will be able to calculate thecorrection number and the similarity number as shownin Tables 1–5 and Figs. 15–19 show the original imagequerying, the left shifted object image querying, the rightshifted object image querying, the shrunk object imagequerying, and the rotated object image querying results.We can see the accuracy rate is up to 100% for all of themin the first sorting results, however the similarity numberis based on the second object sorting according to theabove proposed method. This experiment assumes that(b) and (p) in Fig. 12 are for a group, (e), (i) and (o) arefor another group, and the rest are bottles and steel cupsor mugs for a group. The major work in this experiment

Fig. 17. The sorting results from the right shifted object image querying based on Fig. 12(o).
Fig. 18. The sorting results from the shrunk object image querying based on Fig. 12(o).
108 L.-H. Juang et al. / Measurement 51 (2014) 100–111

Fig. 19. The sorting results from the rotated object image querying based on Fig. 12(o).
Fig. 20. The distance comparison.
L.-H. Juang et al. / Measurement 51 (2014) 100–111 109
is on the similarity calculation for the first two groups, wefound that the common textures are almost same but thecolors are different. In this condition, the group of (e), (i)and (o) in the five cases test for the correction are all100%, and their similarity sorting is on the first three rank-ings, therefore we define the accuracy rate is 100% But thegroup of (b) and (p) has a lower accuracy rate and similar-ity, the similarity number in the parenthesis represents theworst sorting. For example, the shrunk images test, wefound that the two objects whose color information is verydifferent which will occur this problem, and the group of(e), (i) and (o) has a very close color in the middle largeblock and the remaining block still has some mixture
similar color, therefore its tolerance is acceptable. As shownin Tables 1–5, the similarity can reach 87.5%, 62.5%, 75%and 87.5% respectively. Fig. 20 shows the distance compar-ison result according to Euclidean distance statistics whichis based on Fig. 21 experiment test for the different anglesand the locations with the original image. The E, X, S, and Yrepresent the original image characteristics, horizontalrotation, pixel shifting and vertical rotation respectively.The experimental results show the accuracy rate is 58.7%by using the original feature image processing, howeverthe accuracy rate is up to 83.4% after the horizontal rota-tion, the pixel shifting and the vertical rotation processing.The results also show as long as the result appears on thetop six rankings, the judgment is properly, and otherwisethe judgment is failed. Summarily, when we use only onefeature conversion processing, the effect is the less signifi-cant as Fig. 20 E index value shown, when we use the twofeatures conversion processing together, the effect is betteras Fig. 20 EX index value shown, Similarly, when we usethe four kinds of features conversion processing together,the effect is the best as Fig. 20 EXSY index value shown.Fig. 22 shows the object image querying results from amobile phone. The result is based on the four distancecalculation results and we took the top six rankings. Theresults have shown the proposed micro structure schemecan has better performance on mobile device. The reasonis the micro structure is based on the pixel point and smallimage size that are matched for the mobile device featurefor a small data processing quantity and a fast response.
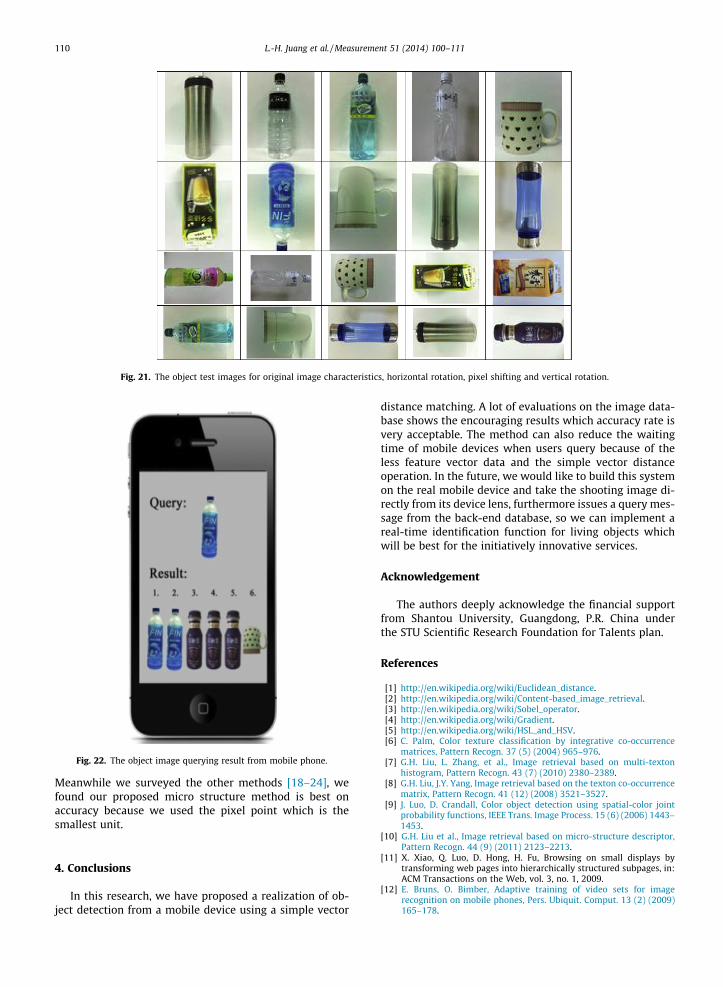
Fig. 21. The object test images for original image characteristics, horizontal rotation, pixel shifting and vertical rotation.
Fig. 22. The object image querying result from mobile phone.
110 L.-H. Juang et al. / Measurement 51 (2014) 100–111
Meanwhile we surveyed the other methods [18–24], wefound our proposed micro structure method is best onaccuracy because we used the pixel point which is thesmallest unit.
4. Conclusions
In this research, we have proposed a realization of ob-ject detection from a mobile device using a simple vector
distance matching. A lot of evaluations on the image data-base shows the encouraging results which accuracy rate isvery acceptable. The method can also reduce the waitingtime of mobile devices when users query because of theless feature vector data and the simple vector distanceoperation. In the future, we would like to build this systemon the real mobile device and take the shooting image di-rectly from its device lens, furthermore issues a query mes-sage from the back-end database, so we can implement areal-time identification function for living objects whichwill be best for the initiatively innovative services.
Acknowledgement
The authors deeply acknowledge the financial supportfrom Shantou University, Guangdong, P.R. China underthe STU Scientific Research Foundation for Talents plan.
References
[1] http://en.wikipedia.org/wiki/Euclidean_distance.[2] http://en.wikipedia.org/wiki/Content-based_image_retrieval.[3] http://en.wikipedia.org/wiki/Sobel_operator.[4] http://en.wikipedia.org/wiki/Gradient.[5] http://en.wikipedia.org/wiki/HSL_and_HSV.[6] C. Palm, Color texture classification by integrative co-occurrence
matrices, Pattern Recogn. 37 (5) (2004) 965–976.[7] G.H. Liu, L. Zhang, et al., Image retrieval based on multi-texton
histogram, Pattern Recogn. 43 (7) (2010) 2380–2389.[8] G.H. Liu, J.Y. Yang, Image retrieval based on the texton co-occurrence
matrix, Pattern Recogn. 41 (12) (2008) 3521–3527.[9] J. Luo, D. Crandall, Color object detection using spatial-color joint
probability functions, IEEE Trans. Image Process. 15 (6) (2006) 1443–1453.
[10] G.H. Liu et al., Image retrieval based on micro-structure descriptor,Pattern Recogn. 44 (9) (2011) 2123–2213.
[11] X. Xiao, Q. Luo, D. Hong, H. Fu, Browsing on small displays bytransforming web pages into hierarchically structured subpages, in:ACM Transactions on the Web, vol. 3, no. 1, 2009.
[12] E. Bruns, O. Bimber, Adaptive training of video sets for imagerecognition on mobile phones, Pers. Ubiquit. Comput. 13 (2) (2009)165–178.

L.-H. Juang et al. / Measurement 51 (2014) 100–111 111
[13] X. Shu, X.-J. Wu, A novel contour descriptor for 2D shape matchingand its application to image retrieval, Image Vis. Comput. 29 (2011)286–294.
[14] G.H. Liu, Z.Y. Li, L. Zhang, Y. Xu, Image retrieval based on micro-structure descriptor, Pattern Recogn. 44 (9) (2011) 2123–2133.
[15] H. Qi, K. Li, Y. Shen, W. Qu, An effective solution for trademark imageretrieval by combining shape description and feature matching,Pattern Recogn. 43 (2010) 2017–2027.
[16] C.C. Lai, Y.C. Chen, A user-oriented image retrieval system based oninteractive genetic algorithm, IEEE Trans. Instrum. Meas. 60 (10)(2011) 3318–3325.
[17] D. Cerra, M. Datcu, A fast compression-based similarity measurewith applications to content-based image retrieval, J. Vis. Commun.Image Represent. 23 (2) (2012) 293–302.
[18] D.G. Lowe, Object recognition from local scale-invariant features, in:International Conference on Computer Vision, vol. 2, 1999, pp.1150–1157.
[19] D.G. Lowe, Distinctive image features from scale-invariantkeypoints, Int. J. Comput. Vision 60 (2) (2004) 91–110.
[20] Robert M. Haralick, K. Shanmugam, Textural features for imageclassification, IEEE Trans. Syst. Man Cybern. 6 (3) (1973) 610–621.
[21] B. Julesz, Textons, the elements of texture perception and theirinteractions, Nature 290 (5802) (1981) 91–97.
[22] B. Julesz, Texton gradients: the texton theory revisited, Biol. Cybern.54 (1986) 245–251.
[23] R.C. Gonzalez, R.E. Woods, Digital Image Processing, third ed.,Prentice-Hall Inc., 2007.
[24] A.L. Amet, A. Ertuzun, A. Ercil, An efficient method for texture defectdetection: sub-band domain co-occurrence matrices, Image Vis.Comput. 18 (2000) 543–553.
[25] M.J. Swain, D.H. Ballard, Color indexing, Int. J. Comput. Vision 7 (1)(1991) 11–32.
[26] R. Brunelli, O. Mich, Histograms analysis for image retrieval, PatternRecogn. 34 (8) (2001) 1625–1637.
[27] R. Min, H.D. Cheng, Effective image retrieval using dominant colordescriptor and fuzzy support vector machine, Pattern Recogn. 42 (1)(2009) 147–157.
[28] Y.K. Chan, C.Y. Chen, Image retrieval system based on color-complexity and color-spatial features, J. Syst. Softw. 71 (2004) 65–70.
[29] T. Hurtut, Y. Gousseau, F. Schmitt, Adaptive image retrieval based onthe spatial organization of colors, Comput. Vis. Image Underst. 112(2008) 101–113.
[30] H. Nezamabadi-pour, E. Kabir, Image retrieval using histograms ofuni-color and bi-color blocks and directional changes in intensitygradient, Pattern Recogn. Lett. 25 (14) (2004) 1547–1557.
[31] P.W. Huang, S.K. Dai, Image retrieval by texture similarity, PatternRecogn. 36 (3) (2003) 665–679.
[32] R.M. Haralick, K. Shanmugam, I. Dinstein, Texture features for imageclassification, IEEE Trans. Syst. Man Cybern. 3 (6) (1973) 610–621.
[33] N. Jhanwar, S. Chaudhuri, G. Seetharaman, B. Zavidovique, Contentbased image retrieval using motif co-occurrence matrix, Image Vis.Comput. 22 (14) (2004) 1211–1220.
[34] B.M. Mehtre, M.S. Kankanhalli, W.F. Lee, Shape measures for contentbased image retrieval: a comparison, Inf. Process. Manage. 33 (3)(1997) 319–337.
[35] C.H. Wei, Y. Li, W.Y. Chau, C.T. Li, Trademark image retrieval usingsynthetic features for describing global shape and interior structure,Pattern Recogn. 42 (3) (2009) 386–394.