on dynamical behavior of a friction-induced oscillator with 2...
TRANSCRIPT

Research ArticleOn Dynamical Behavior of a Friction-Induced Oscillator with2-DOF on a Speed-Varying Traveling Belt
Jinjun Fan Shuangshuang Li and Ge Chen
School of Mathematical Sciences Shandong Normal University Jinan 250014 China
Correspondence should be addressed to Jinjun Fan fjj18126com
Received 30 September 2016 Accepted 4 January 2017 Published 5 February 2017
Academic Editor Stefano Lenci
Copyright copy 2017 Jinjun Fan et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The dynamical behavior of a friction-induced oscillator with 2-DOF on a speed-varying belt is investigated by using the flowswitchability theory of discontinuous dynamical systems The mechanical model consists of two masses and a speed-varyingtraveling belt Both of the masses on the traveling belt are connected with three linear springs and three dampers and areharmonically excited Different domains and boundaries for such system are defined according to the friction discontinuity Basedon the above domains and boundaries the analytical conditions of the passable motions stick motions and grazing motions forthe friction-induced oscillator are obtained mathematically An analytical prediction of periodic motions is performed throughthe mapping dynamics With appropriate mapping structure the simulations of the stick and nonstick motions in the two-degreefriction-induced oscillator are illustrated for a better understanding of the motion complexity
1 Introduction
In mechanical engineering the friction contact betweentwo surfaces of two bodies is an important connection andfriction phenomenon widely exists In recent years muchresearch effort in science and engineering has focussed onnonsmooth dynamical systems [1ndash11] This problem can goback to the 30s of last century In 1930 Hartog [1] investi-gated the nonstick periodic motion of the forced linearoscillator with Coulomb and viscous damping In 1960Levitan [2] proved the existence of periodic motions ina friction oscillator with the periodically driven base In1964 Filippov [3] investigated the motion in the Coulombfriction oscillator and presented differential equation theorywith discontinuous right-hand sides The investigations ofsuch discontinuous differential equations were summarizedin Filippov [4] However Filippovrsquos theorymainly focused onthe existence and uniqueness of the solutions for nonsmoothdynamical systems Such a differential equation theory withdiscontinuity is difficult to apply to practical problems In2003 Awrejcewicz and Olejnik [5] studied a two-degree-of-freedom autonomous system with friction numerically andillustrated some interesting examples of stick-slip regular and
chaotic dynamics In 2014 Pascal [6] discussed a systemcomposed of two masses connected by linear springs oneof the masses is in contact with a rough surface and theother is also subjected to a harmonic external force Severalperiodic orbits were obtained in closed form and symmetryin space and time had been proved for some of these periodicsolutions More discussion about discontinuous system canrefer to [7ndash11]
However a lot of questions caused by the discontinuity(ie the local singularity and the motion switching on theseparation boundary) were not discussed in detail So thefurther investigation on discontinuous dynamical systemsshould be deepened and expanded In 2005ndash2012 Luo [12ndash17] developed a general theory to define real imaginary sinkand source flows and to handle the local singularity and flowswitchability in discontinuous dynamical systems By usingthis theory a lot of discontinuous systems were discussed(eg [18ndash20]) Luo and Gegg [18] presented the force criteriafor the stick and nonstick motions for 1-DOF (degree offreedom) oscillator moving on the belt with dry frictionIn 2009 Luo and Wang [19] investigated the analyticalconditions for stick and nonstick motions in 2-DOF frictioninduced oscillator moving on two belts Velocity and force
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 1208563 19 pageshttpsdoiorg10115520171208563
2 Mathematical Problems in Engineering
responses for stick and nonstick motions in such systemwere illustrated for a better understanding of the motioncomplexity Based on this improved model which consistsof two masses moving on one speed-varying traveling beltand in which the two masses are connected with three linearsprings and three dampers and are exerted by two periodicexcitations nonlinear dynamics mechanism of such a 2-DOFoscillator system will be investigated
In this paper a model of frictional-induced oscillatorwith two degrees of freedom (2-DOF) on a speed-varyingbelt is proposed in which multiple discontinuity boundariesexist they are caused by the presence of friction betweenthe mass and the belt The model allows a simple represen-tation of engineering applications with multiple nonsmoothcharacteristics as for instance friction wheels or slippingmechanisms in multiblock structures The main goal is tostudy the analytical conditions of motion switching and stickmotions of the oscillator on the corresponding boundaries byusing the theory of discontinuous dynamical systems Basedon the discontinuity domain partitions and boundaries willbe defined and the analytical conditions of the passablemotions stick motions and grazing motions for the friction-induced oscillator are obtained mathematically from whichit can be seen that such oscillator has more complicatedand rich dynamical behaviors An analytical condition ofperiodic motions is performed through the mapping dynam-ics With appropriate mapping structure the simulationsof the stick and nonstick motions of the oscillator with 2-DOF are illustrated for a better understanding of the motioncomplexity There are more simulations about such oscillatorto be discussed in future
2 Preliminaries
For convenience the fundamental theory on flow switcha-bility of discontinuous dynamical systems will be presentedthat is concepts of 119866-functions and the decision theorems ofsemipassable flow sink flow and grazing flow to a separationboundary are stated in the following respectively (see [1617])
Assume thatΩ is a bounded simply connected domain in119877119899 and its boundary 120597Ω sub 119877119899minus1 is a smooth surfaceConsider a dynamic system consisting of 119873 subdynamic
systems in a universal domainΩ sub 119877119899 The universal domainis divided into 119873 accessible subdomains Ω120572 (120572 isin 119868) andthe inaccessible domain Ω0 The union of all the accessiblesubdomains is⋃120572isin119868Ω120572 andΩ = ⋃120572isin119868Ω120572cupΩ0 is the universaldomain On the 120572th open subdomain Ω120572 there is a 119862119903120572-continuous system (119903120572 ge 1) in form of
x(120572) equiv F(120572) (x(120572) 119905 p120572) isin 119877119899x(120572) = (119909(120572)1 119909(120572)2 119909(120572)119899 )T isin Ω120572
(1)
The time is 119905 and x = 119889x119889119905 In an accessible subdomain Ω120572the vector field F(120572)(x(120572) 119905 p120572) with parameter vector p120572 =(119901(1)120572 119901(2)120572 119901(119897)120572 )T isin 119877119897 is 119862119903120572-continuous (119903120572 ge 1) in x isinΩ120572 and for all time 119905
The flow on the boundary 120597Ω119894119895 = Ω119894 cap Ω119895 can bedetermined by
x(0) equiv F(0) (x(0) 119905120582)with 120593119894119895 (x(0) 119905120582) = 0 (2)
where x(0) = (119909(0)1 119909(0)2 119909(0)119899 )T With specific initial con-ditions one always obtains different flows on 120593119894119895(x(0) 119905120582) =120593119894119895(x(0)0 1199050120582)
Consider a dynamic system in (1) in domain Ω120572 (120572 isin119894 119895) which has a flow x(120572)119905 = Φ(120572)(1199050 x(120572)0 p120572 119905) with aninitial condition (1199050 x(120572)0 ) and on the boundary 120597Ω119894119895 thereis an enough smooth flow x(0)119905 = Φ(0)(1199050 x(0)0 120582 119905) with aninitial condition (1199050 x(0)0 ) For an arbitrarily small 120576 gt 0 thereare two time intervals [119905 minus 120576 119905) and (119905 119905 + 120576] for flow x(120572)119905 (120572 isin119894 119895) and the flow x(120572)119905 approaches the separation boundaryat time 119905119898 that is x(120572)119905119898plusmn = x119898 = x(0)119905119898 where x
(120572)119905119898plusmn
= x(120572)(119905119898plusmn)x(0)119905119898 = x(0)(119905119898) and x119898 isin 120597Ω119894119895Definition 1 The119866-functions119866(120572)
120597Ω119894119895of the flow x(120572)119905 to the flow
x(0)119905 on the boundary 120597Ω119894119895 are defined as
119866(120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582)= nT120597Ω119894119895
(x(0) 119905120582)sdot [F(120572) (x(120572) 119905 p120572) minus F(0) (x(0) 119905120582)]10038161003816100381610038161003816(x(0)119898 x(120572)119898plusmn 119905119898plusmn)
(3)
where x(0)119898 = x(0)(119905119898) x(120572)119898plusmn = x(120572)(119905119898plusmn) 119905119898plusmn equiv 119905119898 plusmn 0 isto represent the quantity in the domain rather than on theboundary and 119866(120572)
120597Ω119894119895(x119898 119905119898plusmn p120572120582) is a time rate of the inner
product of displacement difference and the normal directionn120597Ω119894119895(x(0) 119905119898120582)Definition 2 The 119896th-order 119866-functions of the domain flowx(120572)119905 to the boundary flow x(0)119905 in the normal direction of 120597Ω119894119895are defined as
119866(119896120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) = 119896+1sum119904=1
119862s119896+1119863119896+1minus1199040 nT
120597Ω119894119895
sdot [119863119904minus1120572 F (x(120572) 119905 p120572)minus 119863119904minus10 F(0) (x(0) 119905120582)]10038161003816100381610038161003816(x(0)119898 x(120572)119898plusmn 119905119898plusmn)
(4)
where the total derivative operators are defined as
1198630 (sdot) equiv 120597 (sdot)120597x(0) x(0) +
120597 (sdot)119905
119863120572 (sdot) equiv 120597 (sdot)120597x(120572) x(120572) +
120597 (sdot)119905
(5)
For 119896 = 0 we have119866(119896120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) = 119866(120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) (6)
Mathematical Problems in Engineering 3
Definition 3 For a discontinuous dynamical system in (1)there is a point x(119905119898) equiv x119898 isin 120597Ω119894119895 For an arbitrarily small120576 gt 0 there are two time intervals [119905119898 minus120576 119905119898) and (119905119898 119905119898 +120576]Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) if
nT120597Ω119894119895
(x(0)119898minus120576) sdot [x(0)119898minus120576 minus x(119894)119898minus120576] gt 0nT120597Ω119894119895
(x(0)119898+120576) sdot [x(119895)119898+120576 minus x(0)119898+120576] gt 0 (7)
for n120597Ω119894119895 rarr Ω119895 then a resultant flow of two flows x(120572)(119905) (120572 isin119894 119895) is a semipassable flow from domain Ω119894 to Ω119895 at point(x119898 119905119898) to boundary 120597Ω119894119895 where x(0)119898plusmn120576 = x(0)(119905119898 plusmn 120576) x(120572)119898plusmn120576 =x(120572)(119905119898 plusmn 120576)
To simplify notation usage the symbols 119905119898plusmn120576 represent119905119898 plusmn 120576 in next paragraphs
Lemma 4 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) two flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and 119862119903119895(119905119898 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresemipassable from domain Ω119894 to Ω119895 if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(8)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(9)
Lemma 5 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomainsΩ120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0 there isa time interval [119905119898minus120576 119905119898) Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898minus)Both flows x(119894)(119905) and x(119895)(119905) are 119862119903120572
[119905119898minus120576 119905119898)-continuous for time
119905 and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresink flow if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(10)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(11)
Lemma 6 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingfragmentation bifurcation of the nonpassable flows x(119894)(119905) andx(119895)(119905) of the first kind at point (x119898 119905119898) switching to the passableflow on the boundary 120597Ω119894119895 occurs if and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn pj120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(12)
Lemma 7 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingbifurcation of the passable flow of x(119894)(119905) and x(119895)(119905) at point(x119898 119905119898) switching to the sink flow on the boundary
997888997888997888rarr120597Ω119894119895 occursif and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(13)
Lemma 8 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there is a time interval [119905119898minus120576 119905119898+120576] Suppose x(120572)(119905119898plusmn) = x119898
4 Mathematical Problems in Engineering
The flow x(120572)(119905) is 119862119903120572[119905119898minus120576119905119898+120576]
-continuous (119903120572 ge 2) for time 119905and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (120572 isin 119894 119895) A flow x(120572)(119905) in Ω120572is tangential to the boundary 120597Ω119894119895 if and only if
119866(0120572)120597Ω119894119895 (x119898 119905119898 p120572120582) = 0 119891119900119903 120572 isin 119894 119895 (14)
either
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) lt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120573 (15)
or
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) gt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120572 (16)
More detailed theory on the flow switchability such asthe definitions or theorems about various flow passability indiscontinuous dynamical systems can be referred to [16 17]
3 Physical Model
Consider a friction-induced oscillator with two degrees offreedom on the speed-varying traveling belt as shown inFigure 1 The system consists of two masses 119898120572 (120572 = 1 2)which are connected with three linear springs of stiffness119896120572 (120572 = 1 2 3) and three dampers of coefficient 119903120572 (120572 =1 2 3) Both of masses move on the belt with varying speed119881(119905) Two periodic excitations119860120572 +119861120572 cosΩ119905 (120572 = 1 2)withfrequency Ω amplitudes 119861120572 (120572 = 1 2) and constant forces119860120572 (120572 = 1 2) are exerted on the two masses respectively
There exist friction forces between the twomasses and thebelt so the two masses can move or stay on the surface of thebelt Let 119881(119905) be the speed of the belt and
119881 (119905) = 1198810 cos (Ω119905 + 120573) + 1198811 (17)
where Ω and 120573 are the oscillation frequency and primaryphase of the traveling belt respectively 1198810 is the oscillationamplitude of the traveling belt and 1198811 is constant
Further the friction force shown in Figure 2 is describedby
119865(120572)119891 (120572)
= 120583119896119865(120572)119873 120572 gt 119881 (119905) isin [minus120583119896119865(120572)119873 120583119896119865(120572)119873 ] 120572 = 119881 (119905) = minus120583119896119865(120572)119873 120572 lt 119881 (119905)
(18)
where 120572 = 119889119909120572119889119905 120583119896 is the coefficient of friction between119898120572 and the belt 119865(120572)119873 = 119898120572119892 (120572 = 1 2) and 119892 is theacceleration of gravity The nonfriction force acting on themass 119898120572 in the 119909120572-direction is defined as
119865(120572)119904 = 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572minus 1198963 (119909120572 minus 119909120573)
(19)
where 120572 120573 isin 1 2 and 120572 = 120573 From now on 119865(120572)119891
= 120583119896 sdot 119865(120572)119873
x1 x2
B1cosΩt + A1 B2cosΩt + A2
k1 k2k3
r1 r2r3m1 m2
V(t)
Figure 1 Physical model
F(120572)f
120583kF(120572)N
V(t) x120572
minus120583kF(120572)N
Figure 2 Force of friction
From the previous discussion there are four cases ofmotions
Case 1 (nonstick motion (120572 = 119881(119905)) (120572 = 1 2)) When119865(120572)119904 can overcome the static friction force 119865(120572)
119891(ie |119865(120572)119904 | gt
|119865(120572)119891
| 120572 = 1 2) the mass 119898120572 has relative motion to the beltthat is
120572 = 119881 (119905) (120572 = 1 2) (20)
For the nonstick motion of the mass 119898120572 (120572 = 1 2) thetotal force acting on the mass119898120572 is
119865(120572) = 119865(120572)119904 minus 119865(120572)119891 sgn (120572 minus 119881 (119905))= 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572
minus 1198963 (119909120572 minus 119909120573) minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (21)
and the equations of nonstick motion for the 2-DOF dryfriction induced oscillator are
119898120572120572 + 119903120572120572 + 1199033 (120572 minus 120573) + 119896120572119909120572 + 1198963 (119909120572 minus 119909120573)= 119861120572 cosΩ119905 + 119860120572 minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (22)
where 120572 120573 isin 1 2 120572 = 120573
Mathematical Problems in Engineering 5
Case 2 (single stick motion (1 = 119881(119905) 2 = 119881(119905))) When119865(1)119904 cannot overcome the static friction force119865(1)
119891(ie |119865(1)119904 | le
|119865(1)119891
|) mass1198981 does not have any relative motion to the beltthat is
1 = 119881 (119905) 1 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (23)
meanwhile when 119865(2)119904 can overcome the static friction force119865(2)119891
(ie |119865(2)119904 | gt |119865(2)119891
|) the mass 1198982 has relative motion tothe belt that is
2 = 119881 (119905) 11989822 + 11990322 + 1199033 (2 minus 1) + 11989621199092 + 1198963 (1199092 minus 1199091)
= 1198612 cosΩ119905 + 1198602 minus 119865(2)119891 sgn (2 minus 119881 (119905)) (24)
Case 3 (single stick motion (2 = 119881(119905) 1 = 119881(119905))) When119865(2)119904 cannot overcome the static friction force119865(2)
119891(ie |119865(2)119904 | le
|119865(2)119891
|) mass1198982 does not have any relative motion to the beltthat is
2 = 119881 (119905) 2 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (25)
meanwhile when 119865(1)119904 can overcome the static friction force119865(1)119891
(ie |119865(1)119904 | gt |119865(1)119891
|) mass 1198981 has relative motion to thebelt that is
1 = 119881 (119905) 11989811 + 11990311 + 1199033 (1 minus 2) + 11989611199091 + 1198963 (1199091 minus 1199092)
= 1198611 cosΩ119905 + 1198601 minus 119865(1)119891 sgn (1 minus 119881 (119905)) (26)
Case 4 (double stick motions (120572 = 119881(119905)) (120572 = 1 2))When 119865(120572)119904 cannot overcome the static friction force 119865(120572)
119891(ie
|119865(120572)119904 | le |119865(120572)119891
|) mass119898120572 does not have any relative motion tothe belt that is
120572 = 119881 (119905) 120572 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (27)
Integrating (17) leads to the displacement of the belt
119909 (119905) = 1198810Ω [sin (Ω119905 + 120573) minus sin (Ω119905119894 + 120573)] + 1198811 (119905 minus 119905119894)+ 119909119905119894
(28)
where 119905 gt 119905119894 and 119909119905119894 = 119909(119905119894)4 Domains and Boundaries
Due to frictions between the mass 119898120572 (120572 = 1 2) and thetraveling belt the motions become discontinuous and more
y120572
x120572
V1
V(t)
Figure 3 Phase plane of 119898120572
complicatedThe phase space of the discontinuous dynamicalsystem is divided into four 4-dimensional domains
The state variables and vector fields are introduced by
x = (1199091 1 1199092 2)T = (1199091 1199101 1199092 1199102)T F = (1199101 1198651 1199102 1198652)T (29)
By the state variables the domains are defined as
Ω1 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 gt 119881 (119905) Ω2 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 lt 119881 (119905) Ω3 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 lt 119881 (119905) Ω4 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 gt 119881 (119905)
(30)
and the corresponding boundaries are defined as
120597Ω12 = 120597Ω21 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199102minus 119881 (119905) = 0 1199101 ge 119881 (119905)
120597Ω23 = 120597Ω32 = (1199091 1199101 1199092 1199102) | 12059323 = 12059332 = 1199101minus 119881 (119905) = 0 1199102 le 119881 (119905)
120597Ω34 = 120597Ω43 = (1199091 1199101 1199092 1199102) | 12059334 = 12059343 = 1199102minus 119881 (119905) = 0 1199101 le 119881 (119905)
120597Ω14 = 120597Ω41 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199101minus 119881 (119905) = 0 1199102 ge 119881 (119905)
(31)
The phase plane of119898120572 is shown in Figure 3The 2-dimensional edges of the 3-dimensional bound-
aries are defined by
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (32)
6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
responses for stick and nonstick motions in such systemwere illustrated for a better understanding of the motioncomplexity Based on this improved model which consistsof two masses moving on one speed-varying traveling beltand in which the two masses are connected with three linearsprings and three dampers and are exerted by two periodicexcitations nonlinear dynamics mechanism of such a 2-DOFoscillator system will be investigated
In this paper a model of frictional-induced oscillatorwith two degrees of freedom (2-DOF) on a speed-varyingbelt is proposed in which multiple discontinuity boundariesexist they are caused by the presence of friction betweenthe mass and the belt The model allows a simple represen-tation of engineering applications with multiple nonsmoothcharacteristics as for instance friction wheels or slippingmechanisms in multiblock structures The main goal is tostudy the analytical conditions of motion switching and stickmotions of the oscillator on the corresponding boundaries byusing the theory of discontinuous dynamical systems Basedon the discontinuity domain partitions and boundaries willbe defined and the analytical conditions of the passablemotions stick motions and grazing motions for the friction-induced oscillator are obtained mathematically from whichit can be seen that such oscillator has more complicatedand rich dynamical behaviors An analytical condition ofperiodic motions is performed through the mapping dynam-ics With appropriate mapping structure the simulationsof the stick and nonstick motions of the oscillator with 2-DOF are illustrated for a better understanding of the motioncomplexity There are more simulations about such oscillatorto be discussed in future
2 Preliminaries
For convenience the fundamental theory on flow switcha-bility of discontinuous dynamical systems will be presentedthat is concepts of 119866-functions and the decision theorems ofsemipassable flow sink flow and grazing flow to a separationboundary are stated in the following respectively (see [1617])
Assume thatΩ is a bounded simply connected domain in119877119899 and its boundary 120597Ω sub 119877119899minus1 is a smooth surfaceConsider a dynamic system consisting of 119873 subdynamic
systems in a universal domainΩ sub 119877119899 The universal domainis divided into 119873 accessible subdomains Ω120572 (120572 isin 119868) andthe inaccessible domain Ω0 The union of all the accessiblesubdomains is⋃120572isin119868Ω120572 andΩ = ⋃120572isin119868Ω120572cupΩ0 is the universaldomain On the 120572th open subdomain Ω120572 there is a 119862119903120572-continuous system (119903120572 ge 1) in form of
x(120572) equiv F(120572) (x(120572) 119905 p120572) isin 119877119899x(120572) = (119909(120572)1 119909(120572)2 119909(120572)119899 )T isin Ω120572
(1)
The time is 119905 and x = 119889x119889119905 In an accessible subdomain Ω120572the vector field F(120572)(x(120572) 119905 p120572) with parameter vector p120572 =(119901(1)120572 119901(2)120572 119901(119897)120572 )T isin 119877119897 is 119862119903120572-continuous (119903120572 ge 1) in x isinΩ120572 and for all time 119905
The flow on the boundary 120597Ω119894119895 = Ω119894 cap Ω119895 can bedetermined by
x(0) equiv F(0) (x(0) 119905120582)with 120593119894119895 (x(0) 119905120582) = 0 (2)
where x(0) = (119909(0)1 119909(0)2 119909(0)119899 )T With specific initial con-ditions one always obtains different flows on 120593119894119895(x(0) 119905120582) =120593119894119895(x(0)0 1199050120582)
Consider a dynamic system in (1) in domain Ω120572 (120572 isin119894 119895) which has a flow x(120572)119905 = Φ(120572)(1199050 x(120572)0 p120572 119905) with aninitial condition (1199050 x(120572)0 ) and on the boundary 120597Ω119894119895 thereis an enough smooth flow x(0)119905 = Φ(0)(1199050 x(0)0 120582 119905) with aninitial condition (1199050 x(0)0 ) For an arbitrarily small 120576 gt 0 thereare two time intervals [119905 minus 120576 119905) and (119905 119905 + 120576] for flow x(120572)119905 (120572 isin119894 119895) and the flow x(120572)119905 approaches the separation boundaryat time 119905119898 that is x(120572)119905119898plusmn = x119898 = x(0)119905119898 where x
(120572)119905119898plusmn
= x(120572)(119905119898plusmn)x(0)119905119898 = x(0)(119905119898) and x119898 isin 120597Ω119894119895Definition 1 The119866-functions119866(120572)
120597Ω119894119895of the flow x(120572)119905 to the flow
x(0)119905 on the boundary 120597Ω119894119895 are defined as
119866(120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582)= nT120597Ω119894119895
(x(0) 119905120582)sdot [F(120572) (x(120572) 119905 p120572) minus F(0) (x(0) 119905120582)]10038161003816100381610038161003816(x(0)119898 x(120572)119898plusmn 119905119898plusmn)
(3)
where x(0)119898 = x(0)(119905119898) x(120572)119898plusmn = x(120572)(119905119898plusmn) 119905119898plusmn equiv 119905119898 plusmn 0 isto represent the quantity in the domain rather than on theboundary and 119866(120572)
120597Ω119894119895(x119898 119905119898plusmn p120572120582) is a time rate of the inner
product of displacement difference and the normal directionn120597Ω119894119895(x(0) 119905119898120582)Definition 2 The 119896th-order 119866-functions of the domain flowx(120572)119905 to the boundary flow x(0)119905 in the normal direction of 120597Ω119894119895are defined as
119866(119896120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) = 119896+1sum119904=1
119862s119896+1119863119896+1minus1199040 nT
120597Ω119894119895
sdot [119863119904minus1120572 F (x(120572) 119905 p120572)minus 119863119904minus10 F(0) (x(0) 119905120582)]10038161003816100381610038161003816(x(0)119898 x(120572)119898plusmn 119905119898plusmn)
(4)
where the total derivative operators are defined as
1198630 (sdot) equiv 120597 (sdot)120597x(0) x(0) +
120597 (sdot)119905
119863120572 (sdot) equiv 120597 (sdot)120597x(120572) x(120572) +
120597 (sdot)119905
(5)
For 119896 = 0 we have119866(119896120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) = 119866(120572)120597Ω119894119895 (x119898 119905119898plusmn p120572120582) (6)
Mathematical Problems in Engineering 3
Definition 3 For a discontinuous dynamical system in (1)there is a point x(119905119898) equiv x119898 isin 120597Ω119894119895 For an arbitrarily small120576 gt 0 there are two time intervals [119905119898 minus120576 119905119898) and (119905119898 119905119898 +120576]Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) if
nT120597Ω119894119895
(x(0)119898minus120576) sdot [x(0)119898minus120576 minus x(119894)119898minus120576] gt 0nT120597Ω119894119895
(x(0)119898+120576) sdot [x(119895)119898+120576 minus x(0)119898+120576] gt 0 (7)
for n120597Ω119894119895 rarr Ω119895 then a resultant flow of two flows x(120572)(119905) (120572 isin119894 119895) is a semipassable flow from domain Ω119894 to Ω119895 at point(x119898 119905119898) to boundary 120597Ω119894119895 where x(0)119898plusmn120576 = x(0)(119905119898 plusmn 120576) x(120572)119898plusmn120576 =x(120572)(119905119898 plusmn 120576)
To simplify notation usage the symbols 119905119898plusmn120576 represent119905119898 plusmn 120576 in next paragraphs
Lemma 4 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) two flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and 119862119903119895(119905119898 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresemipassable from domain Ω119894 to Ω119895 if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(8)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(9)
Lemma 5 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomainsΩ120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0 there isa time interval [119905119898minus120576 119905119898) Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898minus)Both flows x(119894)(119905) and x(119895)(119905) are 119862119903120572
[119905119898minus120576 119905119898)-continuous for time
119905 and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresink flow if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(10)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(11)
Lemma 6 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingfragmentation bifurcation of the nonpassable flows x(119894)(119905) andx(119895)(119905) of the first kind at point (x119898 119905119898) switching to the passableflow on the boundary 120597Ω119894119895 occurs if and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn pj120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(12)
Lemma 7 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingbifurcation of the passable flow of x(119894)(119905) and x(119895)(119905) at point(x119898 119905119898) switching to the sink flow on the boundary
997888997888997888rarr120597Ω119894119895 occursif and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(13)
Lemma 8 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there is a time interval [119905119898minus120576 119905119898+120576] Suppose x(120572)(119905119898plusmn) = x119898
4 Mathematical Problems in Engineering
The flow x(120572)(119905) is 119862119903120572[119905119898minus120576119905119898+120576]
-continuous (119903120572 ge 2) for time 119905and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (120572 isin 119894 119895) A flow x(120572)(119905) in Ω120572is tangential to the boundary 120597Ω119894119895 if and only if
119866(0120572)120597Ω119894119895 (x119898 119905119898 p120572120582) = 0 119891119900119903 120572 isin 119894 119895 (14)
either
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) lt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120573 (15)
or
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) gt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120572 (16)
More detailed theory on the flow switchability such asthe definitions or theorems about various flow passability indiscontinuous dynamical systems can be referred to [16 17]
3 Physical Model
Consider a friction-induced oscillator with two degrees offreedom on the speed-varying traveling belt as shown inFigure 1 The system consists of two masses 119898120572 (120572 = 1 2)which are connected with three linear springs of stiffness119896120572 (120572 = 1 2 3) and three dampers of coefficient 119903120572 (120572 =1 2 3) Both of masses move on the belt with varying speed119881(119905) Two periodic excitations119860120572 +119861120572 cosΩ119905 (120572 = 1 2)withfrequency Ω amplitudes 119861120572 (120572 = 1 2) and constant forces119860120572 (120572 = 1 2) are exerted on the two masses respectively
There exist friction forces between the twomasses and thebelt so the two masses can move or stay on the surface of thebelt Let 119881(119905) be the speed of the belt and
119881 (119905) = 1198810 cos (Ω119905 + 120573) + 1198811 (17)
where Ω and 120573 are the oscillation frequency and primaryphase of the traveling belt respectively 1198810 is the oscillationamplitude of the traveling belt and 1198811 is constant
Further the friction force shown in Figure 2 is describedby
119865(120572)119891 (120572)
= 120583119896119865(120572)119873 120572 gt 119881 (119905) isin [minus120583119896119865(120572)119873 120583119896119865(120572)119873 ] 120572 = 119881 (119905) = minus120583119896119865(120572)119873 120572 lt 119881 (119905)
(18)
where 120572 = 119889119909120572119889119905 120583119896 is the coefficient of friction between119898120572 and the belt 119865(120572)119873 = 119898120572119892 (120572 = 1 2) and 119892 is theacceleration of gravity The nonfriction force acting on themass 119898120572 in the 119909120572-direction is defined as
119865(120572)119904 = 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572minus 1198963 (119909120572 minus 119909120573)
(19)
where 120572 120573 isin 1 2 and 120572 = 120573 From now on 119865(120572)119891
= 120583119896 sdot 119865(120572)119873
x1 x2
B1cosΩt + A1 B2cosΩt + A2
k1 k2k3
r1 r2r3m1 m2
V(t)
Figure 1 Physical model
F(120572)f
120583kF(120572)N
V(t) x120572
minus120583kF(120572)N
Figure 2 Force of friction
From the previous discussion there are four cases ofmotions
Case 1 (nonstick motion (120572 = 119881(119905)) (120572 = 1 2)) When119865(120572)119904 can overcome the static friction force 119865(120572)
119891(ie |119865(120572)119904 | gt
|119865(120572)119891
| 120572 = 1 2) the mass 119898120572 has relative motion to the beltthat is
120572 = 119881 (119905) (120572 = 1 2) (20)
For the nonstick motion of the mass 119898120572 (120572 = 1 2) thetotal force acting on the mass119898120572 is
119865(120572) = 119865(120572)119904 minus 119865(120572)119891 sgn (120572 minus 119881 (119905))= 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572
minus 1198963 (119909120572 minus 119909120573) minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (21)
and the equations of nonstick motion for the 2-DOF dryfriction induced oscillator are
119898120572120572 + 119903120572120572 + 1199033 (120572 minus 120573) + 119896120572119909120572 + 1198963 (119909120572 minus 119909120573)= 119861120572 cosΩ119905 + 119860120572 minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (22)
where 120572 120573 isin 1 2 120572 = 120573
Mathematical Problems in Engineering 5
Case 2 (single stick motion (1 = 119881(119905) 2 = 119881(119905))) When119865(1)119904 cannot overcome the static friction force119865(1)
119891(ie |119865(1)119904 | le
|119865(1)119891
|) mass1198981 does not have any relative motion to the beltthat is
1 = 119881 (119905) 1 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (23)
meanwhile when 119865(2)119904 can overcome the static friction force119865(2)119891
(ie |119865(2)119904 | gt |119865(2)119891
|) the mass 1198982 has relative motion tothe belt that is
2 = 119881 (119905) 11989822 + 11990322 + 1199033 (2 minus 1) + 11989621199092 + 1198963 (1199092 minus 1199091)
= 1198612 cosΩ119905 + 1198602 minus 119865(2)119891 sgn (2 minus 119881 (119905)) (24)
Case 3 (single stick motion (2 = 119881(119905) 1 = 119881(119905))) When119865(2)119904 cannot overcome the static friction force119865(2)
119891(ie |119865(2)119904 | le
|119865(2)119891
|) mass1198982 does not have any relative motion to the beltthat is
2 = 119881 (119905) 2 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (25)
meanwhile when 119865(1)119904 can overcome the static friction force119865(1)119891
(ie |119865(1)119904 | gt |119865(1)119891
|) mass 1198981 has relative motion to thebelt that is
1 = 119881 (119905) 11989811 + 11990311 + 1199033 (1 minus 2) + 11989611199091 + 1198963 (1199091 minus 1199092)
= 1198611 cosΩ119905 + 1198601 minus 119865(1)119891 sgn (1 minus 119881 (119905)) (26)
Case 4 (double stick motions (120572 = 119881(119905)) (120572 = 1 2))When 119865(120572)119904 cannot overcome the static friction force 119865(120572)
119891(ie
|119865(120572)119904 | le |119865(120572)119891
|) mass119898120572 does not have any relative motion tothe belt that is
120572 = 119881 (119905) 120572 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (27)
Integrating (17) leads to the displacement of the belt
119909 (119905) = 1198810Ω [sin (Ω119905 + 120573) minus sin (Ω119905119894 + 120573)] + 1198811 (119905 minus 119905119894)+ 119909119905119894
(28)
where 119905 gt 119905119894 and 119909119905119894 = 119909(119905119894)4 Domains and Boundaries
Due to frictions between the mass 119898120572 (120572 = 1 2) and thetraveling belt the motions become discontinuous and more
y120572
x120572
V1
V(t)
Figure 3 Phase plane of 119898120572
complicatedThe phase space of the discontinuous dynamicalsystem is divided into four 4-dimensional domains
The state variables and vector fields are introduced by
x = (1199091 1 1199092 2)T = (1199091 1199101 1199092 1199102)T F = (1199101 1198651 1199102 1198652)T (29)
By the state variables the domains are defined as
Ω1 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 gt 119881 (119905) Ω2 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 lt 119881 (119905) Ω3 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 lt 119881 (119905) Ω4 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 gt 119881 (119905)
(30)
and the corresponding boundaries are defined as
120597Ω12 = 120597Ω21 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199102minus 119881 (119905) = 0 1199101 ge 119881 (119905)
120597Ω23 = 120597Ω32 = (1199091 1199101 1199092 1199102) | 12059323 = 12059332 = 1199101minus 119881 (119905) = 0 1199102 le 119881 (119905)
120597Ω34 = 120597Ω43 = (1199091 1199101 1199092 1199102) | 12059334 = 12059343 = 1199102minus 119881 (119905) = 0 1199101 le 119881 (119905)
120597Ω14 = 120597Ω41 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199101minus 119881 (119905) = 0 1199102 ge 119881 (119905)
(31)
The phase plane of119898120572 is shown in Figure 3The 2-dimensional edges of the 3-dimensional bound-
aries are defined by
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (32)
6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Definition 3 For a discontinuous dynamical system in (1)there is a point x(119905119898) equiv x119898 isin 120597Ω119894119895 For an arbitrarily small120576 gt 0 there are two time intervals [119905119898 minus120576 119905119898) and (119905119898 119905119898 +120576]Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) if
nT120597Ω119894119895
(x(0)119898minus120576) sdot [x(0)119898minus120576 minus x(119894)119898minus120576] gt 0nT120597Ω119894119895
(x(0)119898+120576) sdot [x(119895)119898+120576 minus x(0)119898+120576] gt 0 (7)
for n120597Ω119894119895 rarr Ω119895 then a resultant flow of two flows x(120572)(119905) (120572 isin119894 119895) is a semipassable flow from domain Ω119894 to Ω119895 at point(x119898 119905119898) to boundary 120597Ω119894119895 where x(0)119898plusmn120576 = x(0)(119905119898 plusmn 120576) x(120572)119898plusmn120576 =x(120572)(119905119898 plusmn 120576)
To simplify notation usage the symbols 119905119898plusmn120576 represent119905119898 plusmn 120576 in next paragraphs
Lemma 4 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898+) two flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and 119862119903119895(119905119898 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresemipassable from domain Ω119894 to Ω119895 if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(8)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898+ p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(9)
Lemma 5 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomainsΩ120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0 there isa time interval [119905119898minus120576 119905119898) Suppose x(119894)(119905119898minus) = x119898 = x(119895)(119905119898minus)Both flows x(119894)(119905) and x(119895)(119905) are 119862119903120572
[119905119898minus120576 119905119898)-continuous for time
119905 and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 1 120572 isin 119894 119895) The flowsx(119894)(119905) and x(119895)(119905) at point (x119898 119905119898) to the boundary 120597Ω119894119895 aresink flow if and only if
either
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) lt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119895
(10)
or
119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0119866(119895)120597Ω119894119895
(x119898 119905119898minus p119895120582) gt 0119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(11)
Lemma 6 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingfragmentation bifurcation of the nonpassable flows x(119894)(119905) andx(119895)(119905) of the first kind at point (x119898 119905119898) switching to the passableflow on the boundary 120597Ω119894119895 occurs if and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn pj120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(12)
Lemma 7 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there are two time intervals [119905119898minus120576 119905119898) and (119905119898 119905119898+120576] Supposex(119894)(119905119898minus) = x119898 = x(119895)(119905119898plusmn) The flows x(119894)(119905) and x(119895)(119905) are119862119903119894[119905119898minus120576 119905119898)
and119862119903119895[119905119898minus120576 119905119898+120576]
-continuous for time 119905 respectively and119889119903120572+1x(120572)119889119905119903120572+1 lt infin (119903120572 ge 2 120572 isin 119894 119895) The slidingbifurcation of the passable flow of x(119894)(119905) and x(119895)(119905) at point(x119898 119905119898) switching to the sink flow on the boundary
997888997888997888rarr120597Ω119894119895 occursif and only if
119866(119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) = 0119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(119894)120597Ω119894119895 (x119898 119905119898minus p119894120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) gt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119895119866(1119895)120597Ω119894119895
(x119898 119905119898plusmn p119895120582) lt 0 119891119900119903 n120597Ω119894119895 997888rarr Ω119894
(13)
Lemma 8 For a discontinuous dynamical system in (1) thereis a point x(119905119898) equiv x119898 isin 120597Ω119894119895 at time 119905119898 between two adjacentdomains Ω120572 (120572 isin 119894 119895) For an arbitrarily small 120576 gt 0there is a time interval [119905119898minus120576 119905119898+120576] Suppose x(120572)(119905119898plusmn) = x119898
4 Mathematical Problems in Engineering
The flow x(120572)(119905) is 119862119903120572[119905119898minus120576119905119898+120576]
-continuous (119903120572 ge 2) for time 119905and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (120572 isin 119894 119895) A flow x(120572)(119905) in Ω120572is tangential to the boundary 120597Ω119894119895 if and only if
119866(0120572)120597Ω119894119895 (x119898 119905119898 p120572120582) = 0 119891119900119903 120572 isin 119894 119895 (14)
either
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) lt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120573 (15)
or
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) gt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120572 (16)
More detailed theory on the flow switchability such asthe definitions or theorems about various flow passability indiscontinuous dynamical systems can be referred to [16 17]
3 Physical Model
Consider a friction-induced oscillator with two degrees offreedom on the speed-varying traveling belt as shown inFigure 1 The system consists of two masses 119898120572 (120572 = 1 2)which are connected with three linear springs of stiffness119896120572 (120572 = 1 2 3) and three dampers of coefficient 119903120572 (120572 =1 2 3) Both of masses move on the belt with varying speed119881(119905) Two periodic excitations119860120572 +119861120572 cosΩ119905 (120572 = 1 2)withfrequency Ω amplitudes 119861120572 (120572 = 1 2) and constant forces119860120572 (120572 = 1 2) are exerted on the two masses respectively
There exist friction forces between the twomasses and thebelt so the two masses can move or stay on the surface of thebelt Let 119881(119905) be the speed of the belt and
119881 (119905) = 1198810 cos (Ω119905 + 120573) + 1198811 (17)
where Ω and 120573 are the oscillation frequency and primaryphase of the traveling belt respectively 1198810 is the oscillationamplitude of the traveling belt and 1198811 is constant
Further the friction force shown in Figure 2 is describedby
119865(120572)119891 (120572)
= 120583119896119865(120572)119873 120572 gt 119881 (119905) isin [minus120583119896119865(120572)119873 120583119896119865(120572)119873 ] 120572 = 119881 (119905) = minus120583119896119865(120572)119873 120572 lt 119881 (119905)
(18)
where 120572 = 119889119909120572119889119905 120583119896 is the coefficient of friction between119898120572 and the belt 119865(120572)119873 = 119898120572119892 (120572 = 1 2) and 119892 is theacceleration of gravity The nonfriction force acting on themass 119898120572 in the 119909120572-direction is defined as
119865(120572)119904 = 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572minus 1198963 (119909120572 minus 119909120573)
(19)
where 120572 120573 isin 1 2 and 120572 = 120573 From now on 119865(120572)119891
= 120583119896 sdot 119865(120572)119873
x1 x2
B1cosΩt + A1 B2cosΩt + A2
k1 k2k3
r1 r2r3m1 m2
V(t)
Figure 1 Physical model
F(120572)f
120583kF(120572)N
V(t) x120572
minus120583kF(120572)N
Figure 2 Force of friction
From the previous discussion there are four cases ofmotions
Case 1 (nonstick motion (120572 = 119881(119905)) (120572 = 1 2)) When119865(120572)119904 can overcome the static friction force 119865(120572)
119891(ie |119865(120572)119904 | gt
|119865(120572)119891
| 120572 = 1 2) the mass 119898120572 has relative motion to the beltthat is
120572 = 119881 (119905) (120572 = 1 2) (20)
For the nonstick motion of the mass 119898120572 (120572 = 1 2) thetotal force acting on the mass119898120572 is
119865(120572) = 119865(120572)119904 minus 119865(120572)119891 sgn (120572 minus 119881 (119905))= 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572
minus 1198963 (119909120572 minus 119909120573) minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (21)
and the equations of nonstick motion for the 2-DOF dryfriction induced oscillator are
119898120572120572 + 119903120572120572 + 1199033 (120572 minus 120573) + 119896120572119909120572 + 1198963 (119909120572 minus 119909120573)= 119861120572 cosΩ119905 + 119860120572 minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (22)
where 120572 120573 isin 1 2 120572 = 120573
Mathematical Problems in Engineering 5
Case 2 (single stick motion (1 = 119881(119905) 2 = 119881(119905))) When119865(1)119904 cannot overcome the static friction force119865(1)
119891(ie |119865(1)119904 | le
|119865(1)119891
|) mass1198981 does not have any relative motion to the beltthat is
1 = 119881 (119905) 1 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (23)
meanwhile when 119865(2)119904 can overcome the static friction force119865(2)119891
(ie |119865(2)119904 | gt |119865(2)119891
|) the mass 1198982 has relative motion tothe belt that is
2 = 119881 (119905) 11989822 + 11990322 + 1199033 (2 minus 1) + 11989621199092 + 1198963 (1199092 minus 1199091)
= 1198612 cosΩ119905 + 1198602 minus 119865(2)119891 sgn (2 minus 119881 (119905)) (24)
Case 3 (single stick motion (2 = 119881(119905) 1 = 119881(119905))) When119865(2)119904 cannot overcome the static friction force119865(2)
119891(ie |119865(2)119904 | le
|119865(2)119891
|) mass1198982 does not have any relative motion to the beltthat is
2 = 119881 (119905) 2 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (25)
meanwhile when 119865(1)119904 can overcome the static friction force119865(1)119891
(ie |119865(1)119904 | gt |119865(1)119891
|) mass 1198981 has relative motion to thebelt that is
1 = 119881 (119905) 11989811 + 11990311 + 1199033 (1 minus 2) + 11989611199091 + 1198963 (1199091 minus 1199092)
= 1198611 cosΩ119905 + 1198601 minus 119865(1)119891 sgn (1 minus 119881 (119905)) (26)
Case 4 (double stick motions (120572 = 119881(119905)) (120572 = 1 2))When 119865(120572)119904 cannot overcome the static friction force 119865(120572)
119891(ie
|119865(120572)119904 | le |119865(120572)119891
|) mass119898120572 does not have any relative motion tothe belt that is
120572 = 119881 (119905) 120572 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (27)
Integrating (17) leads to the displacement of the belt
119909 (119905) = 1198810Ω [sin (Ω119905 + 120573) minus sin (Ω119905119894 + 120573)] + 1198811 (119905 minus 119905119894)+ 119909119905119894
(28)
where 119905 gt 119905119894 and 119909119905119894 = 119909(119905119894)4 Domains and Boundaries
Due to frictions between the mass 119898120572 (120572 = 1 2) and thetraveling belt the motions become discontinuous and more
y120572
x120572
V1
V(t)
Figure 3 Phase plane of 119898120572
complicatedThe phase space of the discontinuous dynamicalsystem is divided into four 4-dimensional domains
The state variables and vector fields are introduced by
x = (1199091 1 1199092 2)T = (1199091 1199101 1199092 1199102)T F = (1199101 1198651 1199102 1198652)T (29)
By the state variables the domains are defined as
Ω1 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 gt 119881 (119905) Ω2 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 lt 119881 (119905) Ω3 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 lt 119881 (119905) Ω4 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 gt 119881 (119905)
(30)
and the corresponding boundaries are defined as
120597Ω12 = 120597Ω21 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199102minus 119881 (119905) = 0 1199101 ge 119881 (119905)
120597Ω23 = 120597Ω32 = (1199091 1199101 1199092 1199102) | 12059323 = 12059332 = 1199101minus 119881 (119905) = 0 1199102 le 119881 (119905)
120597Ω34 = 120597Ω43 = (1199091 1199101 1199092 1199102) | 12059334 = 12059343 = 1199102minus 119881 (119905) = 0 1199101 le 119881 (119905)
120597Ω14 = 120597Ω41 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199101minus 119881 (119905) = 0 1199102 ge 119881 (119905)
(31)
The phase plane of119898120572 is shown in Figure 3The 2-dimensional edges of the 3-dimensional bound-
aries are defined by
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (32)
6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
The flow x(120572)(119905) is 119862119903120572[119905119898minus120576119905119898+120576]
-continuous (119903120572 ge 2) for time 119905and 119889119903120572+1x(120572)119889119905119903120572+1 lt infin (120572 isin 119894 119895) A flow x(120572)(119905) in Ω120572is tangential to the boundary 120597Ω119894119895 if and only if
119866(0120572)120597Ω119894119895 (x119898 119905119898 p120572120582) = 0 119891119900119903 120572 isin 119894 119895 (14)
either
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) lt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120573 (15)
or
119866(1120572)120597Ω119894119895 (x119898 119905119898 p120572120582) gt 0 119891119900119903 n120597Ω120572120573 997888rarr Ω120572 (16)
More detailed theory on the flow switchability such asthe definitions or theorems about various flow passability indiscontinuous dynamical systems can be referred to [16 17]
3 Physical Model
Consider a friction-induced oscillator with two degrees offreedom on the speed-varying traveling belt as shown inFigure 1 The system consists of two masses 119898120572 (120572 = 1 2)which are connected with three linear springs of stiffness119896120572 (120572 = 1 2 3) and three dampers of coefficient 119903120572 (120572 =1 2 3) Both of masses move on the belt with varying speed119881(119905) Two periodic excitations119860120572 +119861120572 cosΩ119905 (120572 = 1 2)withfrequency Ω amplitudes 119861120572 (120572 = 1 2) and constant forces119860120572 (120572 = 1 2) are exerted on the two masses respectively
There exist friction forces between the twomasses and thebelt so the two masses can move or stay on the surface of thebelt Let 119881(119905) be the speed of the belt and
119881 (119905) = 1198810 cos (Ω119905 + 120573) + 1198811 (17)
where Ω and 120573 are the oscillation frequency and primaryphase of the traveling belt respectively 1198810 is the oscillationamplitude of the traveling belt and 1198811 is constant
Further the friction force shown in Figure 2 is describedby
119865(120572)119891 (120572)
= 120583119896119865(120572)119873 120572 gt 119881 (119905) isin [minus120583119896119865(120572)119873 120583119896119865(120572)119873 ] 120572 = 119881 (119905) = minus120583119896119865(120572)119873 120572 lt 119881 (119905)
(18)
where 120572 = 119889119909120572119889119905 120583119896 is the coefficient of friction between119898120572 and the belt 119865(120572)119873 = 119898120572119892 (120572 = 1 2) and 119892 is theacceleration of gravity The nonfriction force acting on themass 119898120572 in the 119909120572-direction is defined as
119865(120572)119904 = 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572minus 1198963 (119909120572 minus 119909120573)
(19)
where 120572 120573 isin 1 2 and 120572 = 120573 From now on 119865(120572)119891
= 120583119896 sdot 119865(120572)119873
x1 x2
B1cosΩt + A1 B2cosΩt + A2
k1 k2k3
r1 r2r3m1 m2
V(t)
Figure 1 Physical model
F(120572)f
120583kF(120572)N
V(t) x120572
minus120583kF(120572)N
Figure 2 Force of friction
From the previous discussion there are four cases ofmotions
Case 1 (nonstick motion (120572 = 119881(119905)) (120572 = 1 2)) When119865(120572)119904 can overcome the static friction force 119865(120572)
119891(ie |119865(120572)119904 | gt
|119865(120572)119891
| 120572 = 1 2) the mass 119898120572 has relative motion to the beltthat is
120572 = 119881 (119905) (120572 = 1 2) (20)
For the nonstick motion of the mass 119898120572 (120572 = 1 2) thetotal force acting on the mass119898120572 is
119865(120572) = 119865(120572)119904 minus 119865(120572)119891 sgn (120572 minus 119881 (119905))= 119861120572 cosΩ119905 + 119860120572 minus 119903120572120572 minus 1199033 (120572 minus 120573) minus 119896120572119909120572
minus 1198963 (119909120572 minus 119909120573) minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (21)
and the equations of nonstick motion for the 2-DOF dryfriction induced oscillator are
119898120572120572 + 119903120572120572 + 1199033 (120572 minus 120573) + 119896120572119909120572 + 1198963 (119909120572 minus 119909120573)= 119861120572 cosΩ119905 + 119860120572 minus 119865(120572)119891 sgn (120572 minus 119881 (119905)) (22)
where 120572 120573 isin 1 2 120572 = 120573
Mathematical Problems in Engineering 5
Case 2 (single stick motion (1 = 119881(119905) 2 = 119881(119905))) When119865(1)119904 cannot overcome the static friction force119865(1)
119891(ie |119865(1)119904 | le
|119865(1)119891
|) mass1198981 does not have any relative motion to the beltthat is
1 = 119881 (119905) 1 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (23)
meanwhile when 119865(2)119904 can overcome the static friction force119865(2)119891
(ie |119865(2)119904 | gt |119865(2)119891
|) the mass 1198982 has relative motion tothe belt that is
2 = 119881 (119905) 11989822 + 11990322 + 1199033 (2 minus 1) + 11989621199092 + 1198963 (1199092 minus 1199091)
= 1198612 cosΩ119905 + 1198602 minus 119865(2)119891 sgn (2 minus 119881 (119905)) (24)
Case 3 (single stick motion (2 = 119881(119905) 1 = 119881(119905))) When119865(2)119904 cannot overcome the static friction force119865(2)
119891(ie |119865(2)119904 | le
|119865(2)119891
|) mass1198982 does not have any relative motion to the beltthat is
2 = 119881 (119905) 2 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (25)
meanwhile when 119865(1)119904 can overcome the static friction force119865(1)119891
(ie |119865(1)119904 | gt |119865(1)119891
|) mass 1198981 has relative motion to thebelt that is
1 = 119881 (119905) 11989811 + 11990311 + 1199033 (1 minus 2) + 11989611199091 + 1198963 (1199091 minus 1199092)
= 1198611 cosΩ119905 + 1198601 minus 119865(1)119891 sgn (1 minus 119881 (119905)) (26)
Case 4 (double stick motions (120572 = 119881(119905)) (120572 = 1 2))When 119865(120572)119904 cannot overcome the static friction force 119865(120572)
119891(ie
|119865(120572)119904 | le |119865(120572)119891
|) mass119898120572 does not have any relative motion tothe belt that is
120572 = 119881 (119905) 120572 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (27)
Integrating (17) leads to the displacement of the belt
119909 (119905) = 1198810Ω [sin (Ω119905 + 120573) minus sin (Ω119905119894 + 120573)] + 1198811 (119905 minus 119905119894)+ 119909119905119894
(28)
where 119905 gt 119905119894 and 119909119905119894 = 119909(119905119894)4 Domains and Boundaries
Due to frictions between the mass 119898120572 (120572 = 1 2) and thetraveling belt the motions become discontinuous and more
y120572
x120572
V1
V(t)
Figure 3 Phase plane of 119898120572
complicatedThe phase space of the discontinuous dynamicalsystem is divided into four 4-dimensional domains
The state variables and vector fields are introduced by
x = (1199091 1 1199092 2)T = (1199091 1199101 1199092 1199102)T F = (1199101 1198651 1199102 1198652)T (29)
By the state variables the domains are defined as
Ω1 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 gt 119881 (119905) Ω2 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 lt 119881 (119905) Ω3 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 lt 119881 (119905) Ω4 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 gt 119881 (119905)
(30)
and the corresponding boundaries are defined as
120597Ω12 = 120597Ω21 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199102minus 119881 (119905) = 0 1199101 ge 119881 (119905)
120597Ω23 = 120597Ω32 = (1199091 1199101 1199092 1199102) | 12059323 = 12059332 = 1199101minus 119881 (119905) = 0 1199102 le 119881 (119905)
120597Ω34 = 120597Ω43 = (1199091 1199101 1199092 1199102) | 12059334 = 12059343 = 1199102minus 119881 (119905) = 0 1199101 le 119881 (119905)
120597Ω14 = 120597Ω41 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199101minus 119881 (119905) = 0 1199102 ge 119881 (119905)
(31)
The phase plane of119898120572 is shown in Figure 3The 2-dimensional edges of the 3-dimensional bound-
aries are defined by
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (32)
6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Case 2 (single stick motion (1 = 119881(119905) 2 = 119881(119905))) When119865(1)119904 cannot overcome the static friction force119865(1)
119891(ie |119865(1)119904 | le
|119865(1)119891
|) mass1198981 does not have any relative motion to the beltthat is
1 = 119881 (119905) 1 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (23)
meanwhile when 119865(2)119904 can overcome the static friction force119865(2)119891
(ie |119865(2)119904 | gt |119865(2)119891
|) the mass 1198982 has relative motion tothe belt that is
2 = 119881 (119905) 11989822 + 11990322 + 1199033 (2 minus 1) + 11989621199092 + 1198963 (1199092 minus 1199091)
= 1198612 cosΩ119905 + 1198602 minus 119865(2)119891 sgn (2 minus 119881 (119905)) (24)
Case 3 (single stick motion (2 = 119881(119905) 1 = 119881(119905))) When119865(2)119904 cannot overcome the static friction force119865(2)
119891(ie |119865(2)119904 | le
|119865(2)119891
|) mass1198982 does not have any relative motion to the beltthat is
2 = 119881 (119905) 2 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (25)
meanwhile when 119865(1)119904 can overcome the static friction force119865(1)119891
(ie |119865(1)119904 | gt |119865(1)119891
|) mass 1198981 has relative motion to thebelt that is
1 = 119881 (119905) 11989811 + 11990311 + 1199033 (1 minus 2) + 11989611199091 + 1198963 (1199091 minus 1199092)
= 1198611 cosΩ119905 + 1198601 minus 119865(1)119891 sgn (1 minus 119881 (119905)) (26)
Case 4 (double stick motions (120572 = 119881(119905)) (120572 = 1 2))When 119865(120572)119904 cannot overcome the static friction force 119865(120572)
119891(ie
|119865(120572)119904 | le |119865(120572)119891
|) mass119898120572 does not have any relative motion tothe belt that is
120572 = 119881 (119905) 120572 = (119905) = minus1198810Ω sin (Ω119905 + 120573) (27)
Integrating (17) leads to the displacement of the belt
119909 (119905) = 1198810Ω [sin (Ω119905 + 120573) minus sin (Ω119905119894 + 120573)] + 1198811 (119905 minus 119905119894)+ 119909119905119894
(28)
where 119905 gt 119905119894 and 119909119905119894 = 119909(119905119894)4 Domains and Boundaries
Due to frictions between the mass 119898120572 (120572 = 1 2) and thetraveling belt the motions become discontinuous and more
y120572
x120572
V1
V(t)
Figure 3 Phase plane of 119898120572
complicatedThe phase space of the discontinuous dynamicalsystem is divided into four 4-dimensional domains
The state variables and vector fields are introduced by
x = (1199091 1 1199092 2)T = (1199091 1199101 1199092 1199102)T F = (1199101 1198651 1199102 1198652)T (29)
By the state variables the domains are defined as
Ω1 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 gt 119881 (119905) Ω2 = (1199091 1199101 1199092 1199102) | 1199101 gt 119881 (119905) 1199102 lt 119881 (119905) Ω3 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 lt 119881 (119905) Ω4 = (1199091 1199101 1199092 1199102) | 1199101 lt 119881 (119905) 1199102 gt 119881 (119905)
(30)
and the corresponding boundaries are defined as
120597Ω12 = 120597Ω21 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199102minus 119881 (119905) = 0 1199101 ge 119881 (119905)
120597Ω23 = 120597Ω32 = (1199091 1199101 1199092 1199102) | 12059323 = 12059332 = 1199101minus 119881 (119905) = 0 1199102 le 119881 (119905)
120597Ω34 = 120597Ω43 = (1199091 1199101 1199092 1199102) | 12059334 = 12059343 = 1199102minus 119881 (119905) = 0 1199101 le 119881 (119905)
120597Ω14 = 120597Ω41 = (1199091 1199101 1199092 1199102) | 12059312 = 12059321 = 1199101minus 119881 (119905) = 0 1199102 ge 119881 (119905)
(31)
The phase plane of119898120572 is shown in Figure 3The 2-dimensional edges of the 3-dimensional bound-
aries are defined by
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (32)
6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199091 1199101 1199092 1199102) | 12059312 = 12059334= 1199102 minus 119881 (119905) = 0 12059323 = 12059314 = 1199101 minus 119881 (119905) = 0
(33)
From the above discussion the motion equations of theoscillator described in Section 3 in absolute coordinates are
x(120572) = F(120572) (x(120572) 119905) in Ω120572x(12057211205722) = F(12057211205722) (x(12057211205722) 119905) on 120597Ω12057211205722
x(120572112057221205723) = F(120572112057221205723) (x(120572112057221205723) 119905) on 120597Ω120572112057221205723 x(120572) = x(12057211205722) = x(120572112057221205723) = (1199091 1199101 1199092 1199102)T F(120572) = (1199101 119865(120572)1 1199102 119865(120572)2 )T
F(12057211205722) = (1199101 119865(12057211205722)1 1199102 119865(12057211205722)2 )T F(120572112057221205723) = (1199101 119865(120572112057221205723)1 1199102 119865(120572112057221205723)2 )T
(34)
where the forces of per unit mass for the 2-DOF frictioninduced oscillator in the domainΩ120572 (120572 isin 1 2 3 4) are
119865(1)1 = 119865(2)1= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) minus 1198911119865(3)1 = 119865(4)1
= 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) + 1198911
119865(1)2 = 119865(4)2= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(2)2 = 119865(3)2
= 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092minus 1199022 (1199092 minus 1199091) + 1198912
(35)
here
119886120572 = 119860120572119898120572
119887120572 = 119861120572119898120572 119888120572 = 119903120572119898120572
119889120572 = 119896120572119898120572 119901120572 = 1199033119898120572
119902120572 = 1198963119898120572
119891120572 = 119865(120572)119891
119898120572 120572 isin 1 2
(36)
and the forces of per unit mass of the oscillator on theboundary 120597Ω12057211205722 (1205721 1205722 isin 1 2 3 4 1205721 = 1205722) are
119865(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091minus 1199021 (1199091 minus 1199092) minus 1198911
119865(12)2 = 0 for stick on 120597Ω12119865(12)2 isin [119865(1)2 119865(2)2 ] for nonstick on 120597Ω12119865(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) + 1198912119865(23)1 = 0 for stick on 120597Ω23119865(23)1 isin [119865(2)1 119865(3)1 ] for nonstick on 120597Ω23119865(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 11988811199101 minus 1199011 (1199101 minus 1199102) minus 11988911199091
minus 1199021 (1199091 minus 1199092) + 1198911119865(34)2 = 0 for stick on 120597Ω34119865(34)2 isin [119865(4)2 119865(3)2 ] for nonstick on 120597Ω34119865(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 11988821199102 minus 1199012 (1199102 minus 1199101) minus 11988921199092
minus 1199022 (1199092 minus 1199091) minus 1198912119865(14)1 = 0 for stick on 120597Ω14119865(14)1 isin [119865(1)1 119865(4)1 ] for nonstick on 120597Ω14
(37)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 1205721 1205722 1205723 arenot equal to each other without repeating) are
119865(120572112057221205723)120572 isin (119865(12057211205722)1 119865(12057221205723)2 ) 120572 isin 1 2for nonstick on 120597Ω120572112057221205723
119865(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723 (38)
Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
For simplicity the relative displacement velocity andacceleration between themass119898120572 (120572 = 1 2) and the travelingbelt are defined as
119911120572 = 119909120572 minus 119909 (119905) V120572 = 120572 minus 119881 (119905) 120572 = 120572 minus (119905)
(39)
The domains and boundaries in relative coordinates aredefined as
Ω1 = (1199111 V1 1199112 V2) | V1 gt 0 V2 gt 0 Ω2 = (1199111 V1 1199112 V2) | V1 gt 0 V2 lt 0 Ω3 = (1199111 V1 1199112 V2) | V1 lt 0 V2 lt 0 Ω4 = (1199111 V1 1199112 V2) | V1 lt 0 V2 gt 0
(40)
120597Ω12 = 120597Ω21= (1199111 V1 1199112 V2) | 12059312 = 12059321 = V2 = 0 V1 ge 0
120597Ω23 = 120597Ω32= (1199111 V1 1199112 V2) | 12059323 = 12059332 = V1 = 0 V2 le 0
120597Ω34 = 120597Ω43= (1199111 V1 1199112 V2) | 12059334 = 12059343 = V2 = 0 V1 le 0
120597Ω14 = 120597Ω41= (1199111 V1 1199112 V2) | 12059314 = 12059341 = V1 = 0 V2 ge 0
(41)
angΩ120572112057221205723 = 120597Ω12057211205722 cap 120597Ω12057221205723 =3⋂119894=1
Ω120572119894 (42)
where 120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895 (119894 = 119895) 119894 119895 isin1 2 3 The intersection of four 2-dimensional edges is
angΩ1234 = ⋂angΩ120572112057221205723 = (1199111 V1 1199112 V2) | 12059312 = 12059334= V2 = 0 12059323 = 12059314 = V1 = 0
(43)
The domain partitions and boundaries in relative coordi-nates are shown in Figure 4
From the foregoing equations the motion equations inrelative coordinates are as follows
z(120572) = g(120572) (z(120572) x(120572) 119905) in Ω120572z(12057211205722) = g(12057211205722) (z(12057211205722) x(12057211205722) 119905) on 120597Ω12057211205722
z(120572112057221205723) = g(120572112057221205723) (z(120572112057221205723) x(120572112057221205723) 119905)on 120597Ω120572112057221205723
(44)
Ω4Ω1
Ω2Ω3
1
2
120597Ω14
120597Ω12120597Ω34
120597Ω23
Figure 4 Relative domains and boundaries
where
z(120572) = z(12057211205722) = z(120572112057221205723) = (1199111 1 1199112 2)T= (1199111 V1 1199112 V2)T
g(120572) = (1 119892(120572)1 2 119892(120572)2 )T = (V1 119892(120572)1 V2 119892(120572)2 )T g(12057211205722) = (1 119892(12057211205722)1 2 119892(12057211205722)2 )T
= (V1 119892(12057211205722)1 V2 119892(12057211205722)2 )T g(120572112057221205723) = (1 119892(120572112057221205723)1 2 119892(120572112057221205723)2 )T
= (V1 119892(120572112057221205723)1 V2 119892(120572112057221205723)2 )T
(45)
The forces of per unit mass for the 2-DOF frictioninduced oscillator in the domain Ω120572 (120572 isin 1 2 3 4) inrelative coordinates are
119892(1)1 = 119892(2)1= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911 minus (119905) 119892(3)1 = 119892(4)1
= 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911 minus (119905)
119892(1)2 = 119892(4)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912 minus (119905)
8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
119892(2)2 = 119892(3)2= 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912 minus (119905) (46)
The forces of per unit mass of the friction inducedoscillator on the boundary 120597Ω12057211205722 in relative coordinates are
119892(12)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) minus 1198911minus (119905)
119892(12)2 = 0 for stick on 120597Ω12119892(12)2 isin [119892(1)2 119892(2)2 ] for nonstick on 120597Ω12119892(23)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) + 1198912minus (119905)
119892(23)1 = 0 for stick on 120597Ω23119892(23)1 isin [119892(2)1 119892(3)1 ] for nonstick on 120597Ω23119892(34)1 equiv 1198871 cosΩ119905 + 1198861 minus 1198881V1 minus 1199011 (V1 minus V2) minus 11988911199111
minus 1199021 (1199111 minus 1199112) minus 1198881119881 (119905) minus 1198891119909 (119905) + 1198911minus (119905)
119892(34)2 = 0 for stick on 120597Ω34119892(34)2 isin [119892(4)2 119892(3)2 ] for nonstick on 120597Ω34119892(14)2 equiv 1198872 cosΩ119905 + 1198862 minus 1198882V2 minus 1199012 (V2 minus V1) minus 11988921199112
minus 1199022 (1199112 minus 1199111) minus 1198882119881 (119905) minus 1198892119909 (119905) minus 1198912minus (119905)
119892(14)1 = 0 for stick on 120597Ω14119892(14)1 isin [119892(1)1 119892(4)1 ] for nonstick on 120597Ω14
(47)
The forces of per unit mass of the oscillator on theboundary 120597Ω120572112057221205723 (120572119894 isin 1 2 3 4 119894 = 1 2 3 and 120572119894 = 120572119895(119894 = 119895) 119894 119895 isin 1 2 3) are119892(120572112057221205723)120572 isin (119892(12057211205722)1 119892(12057221205723)2 ) 120572 isin 1 2
for no full stick on 120597Ω120572112057221205723 119892(120572112057221205723)120572 = 0 120572 isin 1 2 for full stick on 120597Ω120572112057221205723
(48)
In other words we have the following formulas
119892(123)1 119892(123)2 isin (119892(12)1 119892(23)2 )for no full stick on angΩ123
119892(123)1 = 0119892(123)2 = 0
for full stick on angΩ123119892(234)1 119892(234)2 isin (119892(23)1 119892(34)2 )
for no full stick on angΩ234119892(234)1 = 0119892(234)2 = 0
for full stick on angΩ234119892(341)1 119892(341)2 isin (119892(34)1 119892(41)2 )
for no full stick on angΩ341119892(341)1 = 0119892(341)2 = 0
for full stick on angΩ341119892(412)1 119892(412)2 isin (119892(41)1 119892(12)2 )
for no full stick on angΩ412119892(412)1 = 0119892(412)2 = 0
for full stick on angΩ412
(49)
5 Analytical Conditions
Using the absolute coordinates it is very difficult to developthe analytical conditions for the complex motions of theoscillator described in Section 3 because the boundaries aredependent on time thus the relative coordinates are neededherein for simplicity
From (3) and (4) in Section 2 we have
119866(01205721) (z(120572) x(120572) 119905119898plusmn)= nT120597Ω12057211205722
sdot g(1205721) (z(120572) x(120572) 119905119898plusmn) (50)
119866(11205721) (z(120572) x(120572) 119905119898plusmn)= 2119863nT
120597Ω12057211205722sdot [g(1205721) (119905119898plusmn) minus g(12057211205722) (119905119898)] + nT
120597Ω12057211205722
sdot [119863g(1205721) (119905119898plusmn) minus 119863g(12057211205722) (119905119898)] (51)
Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
In relative coordinates the boundary 120597Ω12057211205722 is indepen-dent on 119905 so119863nT
120597Ω12057211205722= 0 Because of
nT120597Ω12057211205722
sdot g(12057211205722) = 0 (52)
therefore
119863nT120597Ω12057211205722
sdot g(12057211205722) + nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (53)
thus
nT120597Ω12057211205722
sdot 119863g(12057211205722) = 0 (54)
Equation (51) is simplified as
119866(11205721) (z120572 x120572 119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) (55)
119905119898 represents the time for the motion on the velocity bound-ary and 119905119898plusmn = 119905119898 plusmn 0 reflects the responses in the domainrather than on the boundary
From the previous descriptions for the system the normalvector of the boundary 120597Ω12057211205722 in the relative coordinates is
n120597Ω12057211205722 = (120597120593120572112057221205971199111 12059712059312057211205722120597V1 120597120593120572112057221205971199112 12059712059312057211205722120597V2 )T
(56)
With (41) and (56) we have
n120597Ω23 = n120597Ω14 = (0 1 0 0)T n120597Ω12 = n120597Ω34 = (0 0 0 1)T (57)
Theorem 9 For the 2-DOF friction induced oscillatordescribed in Section 3 the nonstick motion (or called passablemotion to boundary) on x119898 isin 120597Ω12057211205722 at time 119905119898 appears if andonly if
(a) 1205721 = 2 1205722 = 1119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898+) gt 0
from Ω2 997888rarr Ω1(58)
(b) 1205721 = 1 1205722 = 2119892(1)2 (119905119898minus) lt 0119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2(59)
(c) 1205721 = 3 1205722 = 4119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898+) gt 0
from Ω3 997888rarr Ω4(60)
(d) 1205721 = 4 1205722 = 3119892(4)2 (119905119898minus) lt 0119892(3)2 (119905119898+) lt 0
from Ω4 997888rarr Ω3(61)
(e) 1205721 = 2 1205722 = 3119892(2)1 (119905119898minus) lt 0119892(3)1 (119905119898+) lt 0
from Ω2 997888rarr Ω3(62)
(f) 1205721 = 3 1205722 = 2119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898+) gt 0
from Ω3 997888rarr Ω2(63)
(g) 1205721 = 4 1205722 = 1119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898+) gt 0
from Ω4 997888rarr Ω1(64)
(h) 1205721 = 1 1205722 = 4119892(1)1 (119905119898minus) lt 0119892(4)1 (119905119898+) lt 0
from Ω1 997888rarr Ω4(65)
Proof By Lemma 4 the passable motion for a flow fromdomainΩ1205721 toΩ1205722 on the boundary 120597Ω12057211205722 at time 119905119898 appearsif and only if for n120597Ω12057211205722 rarr Ω1205721
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898+) = nT
120597Ω12057211205722sdot g(1205722) (119905119898+) lt 0 (66)
From (57) and g(120572) = (V1 119892(120572)1 V2 119892(120572)2 ) we havenT120597Ω12
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 1 2) nT120597Ω34
sdot g(120572) (119905119898plusmn) = 119892(120572)2 (119905119898plusmn) (120572 = 3 4) nT120597Ω23
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 2 3) nT120597Ω14
sdot g(120572) (119905119898plusmn) = 119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(67)
10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Substituting the first formula of (67) into (66) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898+) = nT
120597Ω12sdot g(2) (119905119898+) = 119892(2)2 (119905119898+) lt 0
from Ω1 997888rarr Ω2119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(01) (119905119898+) = nT120597Ω12
sdot g(1) (119905119898+) = 119892(1)2 (119905119898+) gt 0from Ω2 997888rarr Ω1
(68)
So (a) and (b) hold Similarly (c)ndash(h) can be proved
Theorem 10 For the 2-DOF friction induced oscillatordescribed in Section 3 the stick motion in physics (or calledthe sliding motion in mathematics) to the boundary 120597Ω12057211205722 isguaranteed if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898minus) lt 0
on 120597Ω12119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898minus) lt 0
on 120597Ω34119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898minus) lt 0
on 120597Ω14119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898minus) lt 0
on 120597Ω23
(69)
Proof By Lemma 5 and (50) the necessary and sufficientconditions of the sliding motion on the boundary 120597Ω12057211205722 are119866(01205721) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205721) (119905119898minus) lt 0
119866(01205722) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205722) (119905119898minus) gt 0for n120597Ω12057211205722 997888rarr Ω1205721
(70)
Substitute the first formula of (67) into (70) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
for n120597Ω12 997888rarr Ω1(71)
So the conclusion on 120597Ω12 is proved Similarly the otherformulas in (69) can also be proved
Theorem 11 For the 2-DOF friction induced oscillatordescribed in Section 3 the stickmotion on the boundary 120597Ω12057211205722appears if and only if
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(72)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
(73)
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) lt 0from Ω2 to 120597Ω23
(74)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) gt 0from Ω3 to 120597Ω32
(75)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) lt 0from Ω4 to 120597Ω43
(76)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) gt 0from Ω3 to 120597Ω34
(77)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) lt 0from Ω1 to 120597Ω14
(78)
Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) gt 0from Ω4 to 120597Ω41
(79)
Proof By Lemma 7 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the analytical conditions forthe appearance of the stick motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) gt 0from Ω1205722 997888rarr 120597Ω12057211205722
(80)
By (57) we have
nT120597Ω12057211205722
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 1 2)nT120597Ω12057231205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)2 (119905119898plusmn) (120572 = 3 4)nT120597Ω12057221205723
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 2 3)nT120597Ω12057211205724
sdot 119863g(120572) (119905119898plusmn) = 119863119892(120572)1 (119905119898plusmn) (120572 = 1 4)
(81)
where
119863119892(1)2 (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) = 119863119892(3)2 (119905119898plusmn)= 119863119892(4)2 (119905119898plusmn)= minus1198872Ω sinΩ119905 minus 1198882V2 minus 1199012 (V2 minus V1)
minus 1198892V2 minus 1199022 (V2 minus V1) minus 1198882 (119905)minus 1198892119881 (119905) minus (119905)
119863119892(1)1 (119905119898plusmn) = 119863119892(2)1 (119905119898plusmn) = 119863119892(3)1 (119905119898plusmn)= 119863119892(4)1 (119905119898plusmn)= minus1198871Ω sinΩ119905 minus 1198881V1 minus 1199011 (V1 minus V2)
minus 1198891V1 minus 1199021 (V1 minus V2) minus 1198881 (119905)minus 1198891119881 (119905) minus (119905)
(82)
Substitute the first formula of (67) and (81) into (80) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) gt 0from Ω2 to 120597Ω21
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) lt 0from Ω1 to 120597Ω12
(83)So the cases on 120597Ω12 and 120597Ω21 are proved Similarly the otherequations in (74) to (79) can also be proved
Theorem 12 For the 2-DOF friction induced oscillatordescribed in Section 3 the analytical conditions for vanishingof the stick motion from 120597Ω12057211205722 and entering domain Ω1205721 are
119892(2)2 (119905119898minus) gt 0119892(1)2 (119905119898plusmn) = 0
119863119892(1)2 (119905119898plusmn) gt 0from 120597Ω12 997888rarr Ω1
(84)
119892(2)2 (119905119898plusmn) = 0119892(1)2 (119905119898minus) lt 0
119863119892(2)2 (119905119898plusmn) lt 0from 120597Ω12 997888rarr Ω2
(85)
119892(3)2 (119905119898minus) gt 0119892(4)2 (119905119898plusmn) = 0
119863119892(4)2 (119905119898plusmn) gt 0from 120597Ω34 997888rarr Ω4
(86)
119892(3)2 (119905119898plusmn) = 0119892(4)2 (119905119898minus) lt 0
119863119892(3)2 (119905119898plusmn) lt 0from 120597Ω34 997888rarr Ω3
(87)
119892(4)1 (119905119898minus) gt 0119892(1)1 (119905119898plusmn) = 0
119863119892(1)1 (119905119898plusmn) gt 0from 120597Ω14 997888rarr Ω1
(88)
119892(4)1 (119905119898plusmn) = 0119892(1)1 (119905119898minus) lt 0
119863119892(4)1 (119905119898plusmn) lt 0from 120597Ω14 997888rarr Ω4
(89)
12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
119892(3)1 (119905119898minus) gt 0119892(2)1 (119905119898plusmn) = 0
119863119892(2)1 (119905119898plusmn) gt 0from 120597Ω23 997888rarr Ω2
(90)
119892(3)1 (119905119898plusmn) = 0119892(2)1 (119905119898minus) lt 0
119863119892(3)1 (119905119898plusmn) lt 0from 120597Ω23 997888rarr Ω3
(91)
Proof By Lemma 6 and (50) and (55) if the normal directionon 120597Ω12057211205722 is for n120597Ω12057211205722 rarr Ω1205721 the necessary and sufficientconditions for the oscillator sliding motion switched intopassible motion are
119866(01205721) (119905119898minus) = nT120597Ω12057211205722
sdot g(1205721) (119905119898minus) lt 0119866(01205722) (119905119898plusmn) = nT
120597Ω12057211205722sdot g(1205722) (119905119898plusmn) = 0
119866(11205722) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205722) (119905119898plusmn) lt 0from 120597Ω12057211205722 997888rarr Ω1205722
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(01205722) (119905119898minus) = nT
120597Ω12057211205722sdot g(1205722) (119905119898minus) gt 0
119866(11205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot 119863g(1205721) (119905119898plusmn) gt 0from 120597Ω12057211205722 997888rarr Ω1205721
(92)
Substitute the first formula of (67) and (81) into (92) we have
119866(01) (119905119898minus) = nT120597Ω12
sdot g(1) (119905119898minus) = 119892(1)2 (119905119898minus) lt 0119866(02) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(12) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905plusmn) lt 0from 120597Ω12 997888rarr Ω2
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(02) (119905119898minus) = nT
120597Ω12sdot g(2) (119905119898minus) = 119892(2)2 (119905119898minus) gt 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905plusmn) gt 0from 120597Ω12 997888rarr Ω1
(93)
So the cases on 120597Ω12 are proved Similarly the other casesin (86) to (91) can also be proved
Theorem 13 For the 2-DOF friction induced oscillatordescribed in Section 3 the grazing motion on the boundary120597Ω12057211205722 is guaranteed if and only if
119892(1)2 (119905119898plusmn) = 0119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1(94)
119892(2)2 (119905119898plusmn) = 0119863119892(2)2 (119905119898plusmn) lt 0
on 120597Ω12 in Ω2(95)
119892(4)2 (119905119898plusmn) = 0119863119892(4)2 (119905119898plusmn) gt 0
on 120597Ω34 in Ω4(96)
119892(3)2 (119905119898plusmn) = 0119863119892(3)2 (119905119898plusmn) lt 0
on 120597Ω34 in Ω3(97)
119892(1)1 (119905119898plusmn) = 0119863119892(1)1 (119905119898plusmn) gt 0
on 120597Ω14 in Ω1(98)
119892(4)1 (119905119898plusmn) = 0119863119892(4)1 (119905119898plusmn) lt 0
on 120597Ω14 in Ω4(99)
119892(2)1 (119905119898plusmn) = 0119863119892(2)1 (119905119898plusmn) gt 0
on 120597Ω23 in Ω2(100)
119892(3)1 (119905119898plusmn) = 0119863119892(3)1 (119905119898plusmn) lt 0
on 120597Ω23 in Ω3(101)
Proof By Lemma 8 and (50) and (55) the conditions for thegrazing motion in domainΩ1205721 to the boundary 120597Ω12057211205722 are
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) gt 0
for n120597Ω12057211205722 997888rarr Ω1205721
Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
119866(01205721) (119905119898plusmn) = nT120597Ω12057211205722
sdot g(1205721) (119905119898plusmn) = 0119866(11205721) (119905119898plusmn) = nT
120597Ω12057211205722sdot 119863g(1205721) (119905119898plusmn) lt 0
for n120597Ω12057211205722 997888rarr Ω1205722 (102)
By (67) and (81) we have
119866(01) (119905119898plusmn) = nT120597Ω12
sdot g(1) (119905119898plusmn) = 119892(1)2 (119905119898plusmn) = 0119866(11) (119905119898plusmn) = nT
120597Ω12sdot 119863g(1) (119905119898plusmn) = 119863119892(1)2 (119905119898plusmn) gt 0
on 120597Ω12 in Ω1119866(01) (119905119898plusmn) = nT
120597Ω12sdot g(2) (119905119898plusmn) = 119892(2)2 (119905119898plusmn) = 0
119866(11) (119905119898plusmn) = nT120597Ω12
sdot 119863g(2) (119905119898plusmn) = 119863119892(2)2 (119905119898plusmn) lt 0on 120597Ω12 in Ω2
(103)
So the cases on 120597Ω12 are proved Similarly the other formulasin (96)ndash(101) can also be proved
6 Mapping Structures and Periodic Motions
From the boundary 120597Ω12057211205722 in (41) the switching sets are
Σ+1= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0+ 119894 isin 119873
Σ01 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 119894 isin 119873 Σminus1
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0minus 119894 isin 119873 Σ+2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0+ 119894 isin 119873 Σ02 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0 119894 isin 119873 Σminus2
= (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V2(119894) = 0minus 119894 isin 119873
(104)
where 0plusmn = lim120576rarr0+(0 plusmn 120576) and the switching set on the edgeangΩ120572112057221205723 is defined by
Σ00 = (1199111(119894) V1(119894) 1199112(119894) V2(119894) Ω119905119894) | V1(119894) = 0 V2(119894)
= 0 119894 isin 119873 (105)
Ω4 Ω1
Ω2
Ω3
1
2
P0
P1P2 P3
P4
P5
P6
P7
P8
P9
P10
sum+2
sum02
summinus2
sum+1sum01summinus1
Figure 5 Switching sets and mappings
Therefore eleven basic mappings will be defined as
1198751 Σ+1 997888rarr Σ+1 1198752 Σminus1 997888rarr Σminus1 1198753 Σ01 997888rarr Σ011198756 Σ+2 997888rarr Σ+2 1198757 Σminus2 997888rarr Σminus2 1198758 Σ02 997888rarr Σ021198754 Σ+1 997888rarr Σ+2 1198755 Σminus2 997888rarr Σ+1 1198759 Σminus1 997888rarr Σminus2 11987510 Σ+2 997888rarr Σminus1 1198750 Σ00 997888rarr Σ00
(106)
Because the switching set Σ00 is the special case of theswitching sets Σ01 and Σ02 the mappings 1198753 and 1198758 can applyto Σ00 that is
1198753 Σ00 997888rarr Σ011198753 Σ01 997888rarr Σ001198758 Σ00 997888rarr Σ021198758 Σ02 997888rarr Σ00
(107)
The switching sets and mappings are shown in Figure 5In all eleven mappings 119875119899 are the local mappings when119899 = 0 1 2 3 6 7 8 and 119875119899 are the global mappings when119899 = 4 5 9 10 From the previous defined mappings for each
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
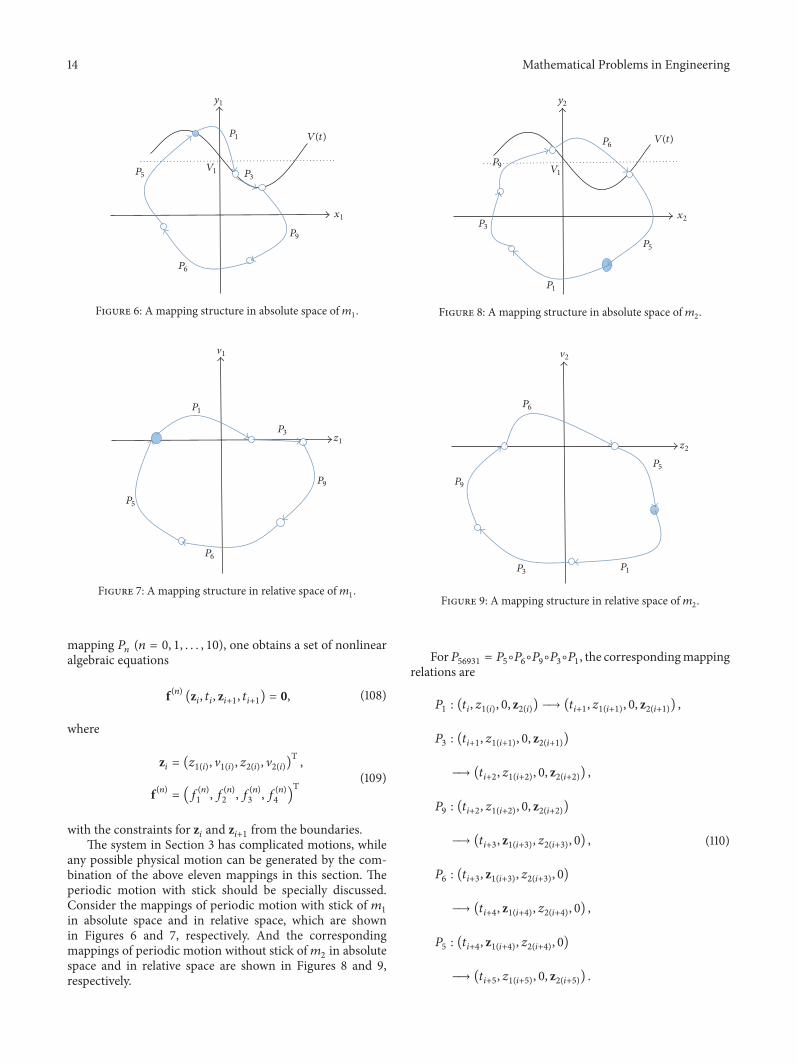
14 Mathematical Problems in Engineering
P1
P3P5
P6
P9
x1
y1
V1
V(t)
Figure 6 A mapping structure in absolute space of 1198981
P1
P3
P5
P6
P9
1
z1
Figure 7 A mapping structure in relative space of 1198981
mapping 119875119899 (119899 = 0 1 10) one obtains a set of nonlinearalgebraic equations
f(119899) (z119894 119905119894 z119894+1 119905119894+1) = 0 (108)
where
z119894 = (1199111(119894) V1(119894) 1199112(119894) V2(119894))T f(119899) = (119891(119899)1 119891(119899)2 119891(119899)3 119891(119899)4 )T (109)
with the constraints for z119894 and z119894+1 from the boundariesThe system in Section 3 has complicated motions while
any possible physical motion can be generated by the com-bination of the above eleven mappings in this section Theperiodic motion with stick should be specially discussedConsider the mappings of periodic motion with stick of 1198981in absolute space and in relative space which are shownin Figures 6 and 7 respectively And the correspondingmappings of periodic motion without stick of 1198982 in absolutespace and in relative space are shown in Figures 8 and 9respectively
P1
P3
P5
P6
P9 V1
V(t)
x2
y2
Figure 8 A mapping structure in absolute space of 1198982
P1P3
P5
P6
P9
2
z2
Figure 9 A mapping structure in relative space of 1198982
For11987556931 = 1198755∘1198756∘1198759∘1198753∘1198751 the correspondingmappingrelations are
1198751 (119905119894 1199111(119894) 0 z2(119894)) 997888rarr (119905119894+1 1199111(119894+1) 0 z2(119894+1)) 1198753 (119905119894+1 1199111(119894+1) 0 z2(119894+1))
997888rarr (119905119894+2 1199111(119894+2) 0 z2(119894+2)) 1198759 (119905119894+2 1199111(119894+2) 0 z2(119894+2))
997888rarr (119905119894+3 z1(119894+3) 1199112(119894+3) 0) 1198756 (119905119894+3 z1(119894+3) 1199112(119894+3) 0)
997888rarr (119905119894+4 z1(119894+4) 1199112(119894+4) 0) 1198755 (119905119894+4 z1(119894+4) 1199112(119894+4) 0)
997888rarr (119905119894+5 1199111(119894+5) 0 z2(119894+5))
(110)
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
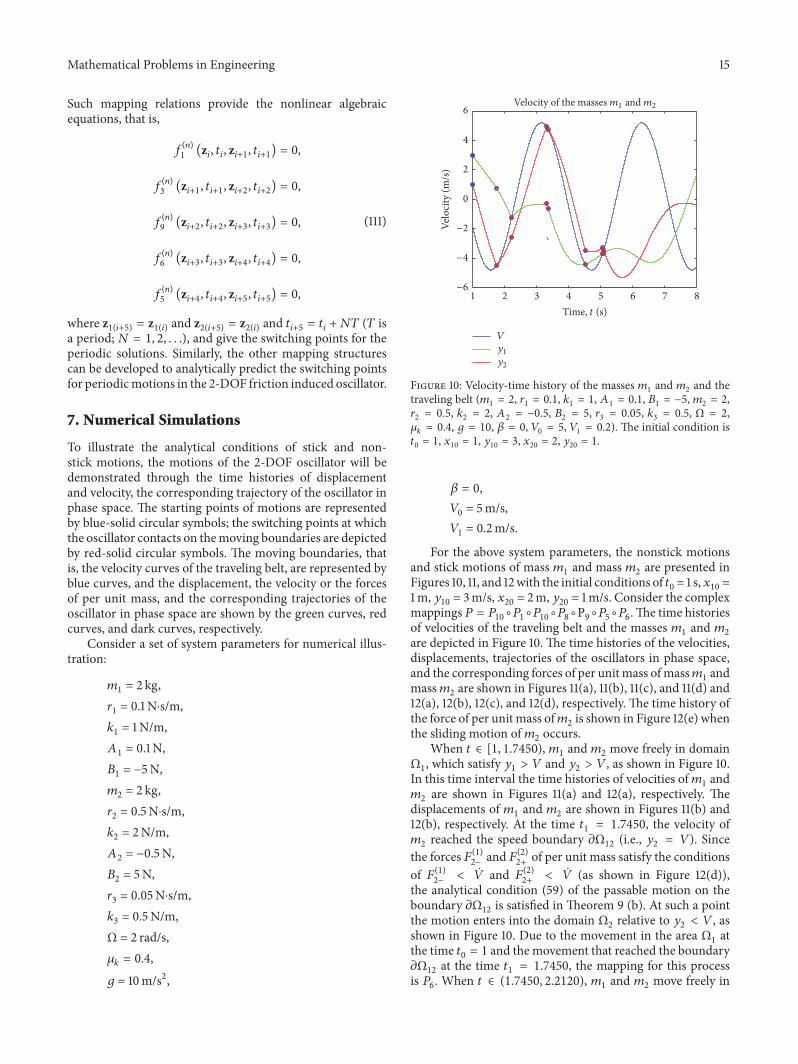
Mathematical Problems in Engineering 15
Such mapping relations provide the nonlinear algebraicequations that is
119891(119899)1 (z119894 119905119894 z119894+1 119905119894+1) = 0119891(119899)3 (z119894+1 119905119894+1 z119894+2 119905119894+2) = 0119891(119899)9 (z119894+2 119905119894+2 z119894+3 119905119894+3) = 0119891(119899)6 (z119894+3 119905119894+3 z119894+4 119905119894+4) = 0119891(119899)5 (z119894+4 119905119894+4 z119894+5 119905119894+5) = 0
(111)
where z1(119894+5) = z1(119894) and z2(119894+5) = z2(119894) and 119905119894+5 = 119905119894 +119873119879 (119879 isa period 119873 = 1 2 ) and give the switching points for theperiodic solutions Similarly the other mapping structurescan be developed to analytically predict the switching pointsfor periodicmotions in the 2-DOF friction induced oscillator
7 Numerical Simulations
To illustrate the analytical conditions of stick and non-stick motions the motions of the 2-DOF oscillator will bedemonstrated through the time histories of displacementand velocity the corresponding trajectory of the oscillator inphase space The starting points of motions are representedby blue-solid circular symbols the switching points at whichthe oscillator contacts on themoving boundaries are depictedby red-solid circular symbols The moving boundaries thatis the velocity curves of the traveling belt are represented byblue curves and the displacement the velocity or the forcesof per unit mass and the corresponding trajectories of theoscillator in phase space are shown by the green curves redcurves and dark curves respectively
Consider a set of system parameters for numerical illus-tration
1198981 = 2 kg1199031 = 01 Nsdotsm1198961 = 1Nm1198601 = 01 N1198611 = minus5N1198982 = 2 kg1199032 = 05Nsdotsm1198962 = 2Nm1198602 = minus05N1198612 = 5N1199033 = 005Nsdotsm1198963 = 05NmΩ = 2 rads120583119896 = 04119892 = 10ms2
y1y2
V
Velocity of the massesm1 andm2
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
(ms
)
Figure 10 Velocity-time history of the masses 1198981 and 1198982 and thetraveling belt (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 21199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
120573 = 01198810 = 5ms1198811 = 02ms
For the above system parameters the nonstick motionsand stick motions of mass 1198981 and mass 1198982 are presented inFigures 10 11 and 12with the initial conditions of 1199050 = 1 s11990910 =1m 11991010 = 3ms 11990920 = 2m 11991020 = 1ms Consider the complexmappings 119875 = 11987510 ∘1198751 ∘11987510 ∘1198758 ∘P9 ∘1198755 ∘1198756The time historiesof velocities of the traveling belt and the masses 1198981 and 1198982are depicted in Figure 10 The time histories of the velocitiesdisplacements trajectories of the oscillators in phase spaceand the corresponding forces of per unit mass ofmass1198981 andmass1198982 are shown in Figures 11(a) 11(b) 11(c) and 11(d) and12(a) 12(b) 12(c) and 12(d) respectively The time history ofthe force of per unit mass of1198982 is shown in Figure 12(e) whenthe sliding motion of1198982 occurs
When 119905 isin [1 17450) 1198981 and 1198982 move freely in domainΩ1 which satisfy 1199101 gt 119881 and 1199102 gt 119881 as shown in Figure 10In this time interval the time histories of velocities of1198981 and1198982 are shown in Figures 11(a) and 12(a) respectively Thedisplacements of 1198981 and 1198982 are shown in Figures 11(b) and12(b) respectively At the time 1199051 = 17450 the velocity of1198982 reached the speed boundary 120597Ω12 (ie 1199102 = 119881) Sincethe forces 119865(1)2minus and 119865(2)2+ of per unit mass satisfy the conditionsof 119865(1)2minus lt and 119865(2)2+ lt (as shown in Figure 12(d))the analytical condition (59) of the passable motion on theboundary 120597Ω12 is satisfied in Theorem 9 (b) At such a pointthe motion enters into the domain Ω2 relative to 1199102 lt 119881 asshown in Figure 10 Due to the movement in the area Ω1 atthe time 1199050 = 1 and the movement that reached the boundary120597Ω12 at the time 1199051 = 17450 the mapping for this processis 1198756 When 119905 isin (17450 22120) 1198981 and 1198982 move freely in
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
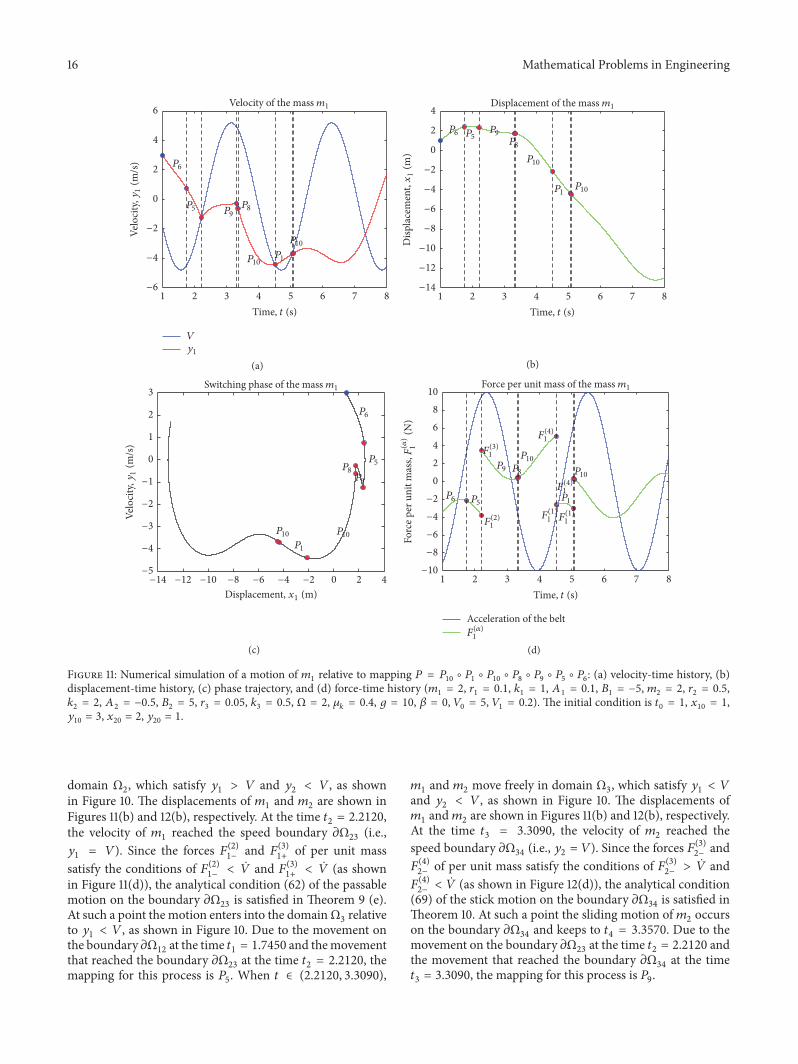
16 Mathematical Problems in Engineering
y1
V
Velocity of the massm1
P1
P5
P6
P8P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y1
(ms
)
(a)
Displacement of the massm1
minus14
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx1
(m)
2 3 4 5 6 7 81Time t (s)
P1
P5P6
P8
P9
P10
P10
(b)
P1
P5
P6
P8P9
P10 P10
minus5
minus4
minus3
minus2
minus1
0
1
2
3
Velo
city
y1
(ms
)
minus12 minus10 minus8 minus4 minus2minus14 minus6 2 40Displacement x1 (m)
Switching phase of the massm1
(c)
P6 P5
P9P10
P8
P1
P10
F(1)1 F(1)1F(2)1
F(3)1
F(4)1
F(4)1
Force per unit mass of the massm1
Acceleration of the beltF(120572)1
minus10
minus8
minus6
minus4
minus2
02468
10Fo
rce p
er u
nit m
assF(120572)
1(N
)
2 3 4 5 6 7 81Time t (s)
(d)
Figure 11 Numerical simulation of a motion of 1198981 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory and (d) force-time history (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 051198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10 120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 111991010 = 3 11990920 = 2 11991020 = 1
domain Ω2 which satisfy 1199101 gt 119881 and 1199102 lt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199052 = 22120the velocity of 1198981 reached the speed boundary 120597Ω23 (ie1199101 = 119881) Since the forces 119865(2)1minus and 119865(3)1+ of per unit masssatisfy the conditions of 119865(2)1minus lt and 119865(3)1+ lt (as shownin Figure 11(d)) the analytical condition (62) of the passablemotion on the boundary 120597Ω23 is satisfied in Theorem 9 (e)At such a point the motion enters into the domainΩ3 relativeto 1199101 lt 119881 as shown in Figure 10 Due to the movement onthe boundary 120597Ω12 at the time 1199051 = 17450 and themovementthat reached the boundary 120597Ω23 at the time 1199052 = 22120 themapping for this process is 1198755 When 119905 isin (22120 33090)
1198981 and 1198982 move freely in domain Ω3 which satisfy 1199101 lt 119881and 1199102 lt 119881 as shown in Figure 10 The displacements of1198981 and1198982 are shown in Figures 11(b) and 12(b) respectivelyAt the time 1199053 = 33090 the velocity of 1198982 reached thespeed boundary 120597Ω34 (ie 1199102 = 119881) Since the forces 119865(3)2minus and119865(4)2minus of per unit mass satisfy the conditions of 119865(3)2minus gt and119865(4)2minus lt (as shown in Figure 12(d)) the analytical condition(69) of the stick motion on the boundary 120597Ω34 is satisfied inTheorem 10 At such a point the sliding motion of 1198982 occurson the boundary 120597Ω34 and keeps to 1199054 = 33570 Due to themovement on the boundary 120597Ω23 at the time 1199052 = 22120 andthe movement that reached the boundary 120597Ω34 at the time1199053 = 33090 the mapping for this process is 1198759
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
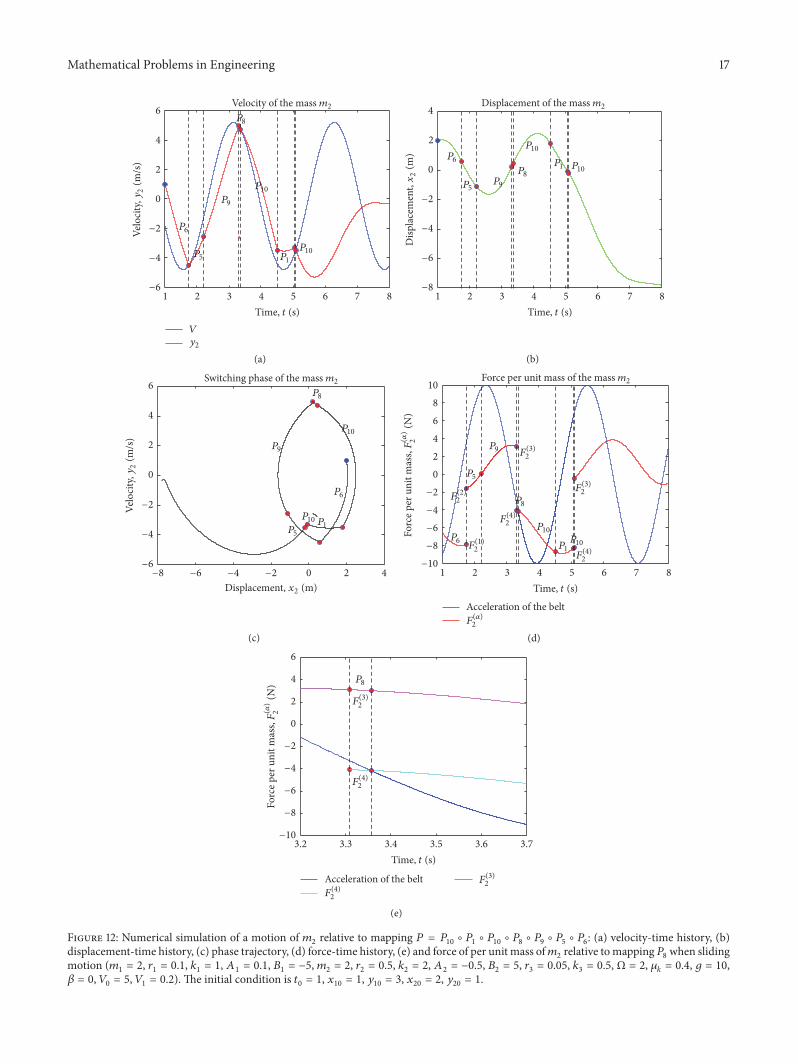
Mathematical Problems in Engineering 17
y2
V
Velocity of the massm2
P1P5
P6
P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus6
minus4
minus2
0
2
4
6
Velo
city
y2
(ms
)
(a)
Displacement of the massm2
P1
P5
P6P8
P9
P10
P10
2 3 4 5 6 7 81Time t (s)
minus8
minus6
minus4
minus2
0
2
4
Disp
lace
men
tx2
(m)
(b)
P1P5
P6
P8
P9
P10
P10
Switching phase of the massm2
minus6
minus4
minus2
0
6
Velo
city
y2
(ms
)
minus6 minus4 minus2 0 2 4minus8
Displacement x2 (m)
2
4
(c)
P6
P5
P9
P10
P8
P1P10F(1)2
F(3)2F(2)2
F(3)2
F(4)2
F(4)2
Force per unit mass of the massm2
Acceleration of the beltF(120572)2
minus10
minus8
minus6
minus4
minus2
02468
10
Forc
e per
uni
t mas
sF(120572)
2(N
)
2 3 4 5 6 7 81Time t (s)
(d)
P8
F(3)2
F(4)2
Acceleration of the belt F(3)2F(4)2
33 34 35 36 3732Time t (s)
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Forc
e per
uni
t mas
sF(120572)
2(N
)
(e)
Figure 12 Numerical simulation of a motion of 1198982 relative to mapping 119875 = 11987510 ∘ 1198751 ∘ 11987510 ∘ 1198758 ∘ 1198759 ∘ 1198755 ∘ 1198756 (a) velocity-time history (b)displacement-time history (c) phase trajectory (d) force-time history (e) and force of per unit mass of1198982 relative tomapping1198758 when slidingmotion (1198981 = 2 1199031 = 01 1198961 = 1 1198601 = 01 1198611 = minus5 1198982 = 2 1199032 = 05 1198962 = 2 1198602 = minus05 1198612 = 5 1199033 = 005 1198963 = 05 Ω = 2 120583119896 = 04 119892 = 10120573 = 0 1198810 = 5 1198811 = 02) The initial condition is 1199050 = 1 11990910 = 1 11991010 = 3 11990920 = 2 11991020 = 1
18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

18 Mathematical Problems in Engineering
When 119905 isin (33090 33570) 1198981 moves freely in domainΩ3 satisfying 1199101 lt 119881 as shown in Figure 10 The dis-placement of 1198981 is shown in Figure 11(b) correspondinglyHowever at such time interval1198982 maintains sliding motionand the time history of force per unit mass of 1198982 is shownin Figure 12(e) In this time period the force product satisfies119865(3)2 sdot 119865(4)2 lt 0 relative to where 119865(3)2 is represented by pinkcurves and 119865(4)2 is represented by light cyan curves At thetime 1199054 = 33570 the forces 119865(3)2minus and 119865(4)2 of per unit masssatisfy the conditions of 119865(3)2minus gt 119865(4)2 = and119863119865(4)2plusmn gt sothe analytical condition (86) of the vanishing of stick motionon the boundary 120597Ω34 is satisfied in Theorem 12 and thesliding motion of 1198982 vanishes and the motion of 1198982 entersthe domainΩ4 Due to the movement on the boundary 120597Ω34from the time 1199053 = 33090 to the time 1199054 = 33570 themapping for this process is 1198758
When 119905 isin (33570 45150) 1198981 and 1198982 move freely againin domain Ω4 which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shownin Figure 10 The displacements of 1198981 and 1198982 are shown inFigures 11(b) and 12(b) respectively At the time 1199055 = 45150the velocity of 1198981 reached the speed boundary 120597Ω14 (ie1199101 = 119881) Since the forces 119865(4)1minus and 119865(1)1+ of per unit masssatisfy the conditions of 119865(4)1minus gt and 119865(1)1+ gt (as shownin Figure 11(d)) the analytical condition (64) of the passablemotion on the boundary 120597Ω41 is satisfied in Theorem 9 (g)At such a point the motion enters into the domainΩ1 relativeto 1199101 gt 119881 as shown in Figure 10 Due to the movement on theboundary 120597Ω34 at the time 1199054 = 33570 and the movementthat reached the boundary 120597Ω41 at the time 1199055 = 45150 themapping for this process is 11987510 When 119905 isin (45150 50570)1198981 and 1198982 move freely in domain Ω1 which satisfy 1199101 gt 119881and 1199102 gt 119881 as shown in Figure 10 The displacements of 1198981and 1198982 are shown in Figures 11(b) and 12(b) respectively Atthe time 1199056 = 50570 the velocity of 1198981 reached the speedboundary 120597Ω41 (ie 1199101 = 119881) Since the forces 119865(1)1minus and 119865(4)1+ ofper unit mass satisfy the conditions of 119865(1)1minus lt and 119865(4)1+ lt (as shown in Figure 11(d)) the analytical condition (65) ofthe passable motion on the boundary 120597Ω41 is satisfied inTheorem 9 (h) At such a point the motion enters into thedomain Ω4 relative to 1199101 lt 119881 as shown in Figure 10 Due tothe movement on the boundary 120597Ω41 at the time 1199055 = 45150and the movement that reached the boundary 120597Ω41 at thetime 1199056 = 50570 the mapping for this process is 1198751 When119905 isin (50570 50910) 1198981 and 1198982 move freely in domain Ω4which satisfy 1199101 lt 119881 and 1199102 gt 119881 as shown in Figure 10The displacements of 1198981 and 1198982 are shown in Figures 11(b)and 12(b) respectively At the time 1199057 = 50910 the velocityof 1198982 reached the speed boundary 120597Ω34 (ie 1199102 = 119881) Sincethe forces 119865(4)2minus and 119865(3)2+ of per unit mass satisfy the conditionsof 119865(4)2minus lt and 119865(3)2+ lt the analytical condition (61)of the passable motion on the boundary 120597Ω34 is satisfiedin Theorem 9 (d) At such a point the motion enters intothe domain Ω3 relative to 1199102 lt 119881 as shown in Figure 10Due to the movement on the boundary 120597Ω41 at the time1199056 = 50570 and the movement that reached the boundary120597Ω34 at the time 1199057 = 50910 the mapping for this process is11987510
When 119905 gt 50910 the movement will continue but herethe later motion will not be described In the whole processthe phase trajectories of1198981 and1198982 are shown in Figures 11(c)and 12(c) respectively
8 Conclusion
The model of frictional-induced oscillator with two degreesof freedom on a speed-varying traveling belt was proposedThe dynamics of such oscillator with two harmonicallyexternal excitations on a speed-varying traveling belt wereinvestigated by using the theory of flow switchability fordiscontinuous dynamical systems The dynamics of thissystem are of interest because it is a simple representationof mechanical systems with multiple nonsmooth characteris-tics Different domains and boundaries for such system weredefined according to the friction discontinuity Based on theabove domains and boundaries the analytical conditions forthe passable motions and the onset or vanishing of stickmotions and grazing motions were presented The basicmappings were introduced to describe motions in such anoscillator Analytical conditions of periodic motions weredeveloped by the mapping dynamics Numerical simulationswere carried out to illustrate stick and nonstick motionsfor a better understanding of complicated dynamics of suchmechanical model Through the velocity and force responsesof suchmotions it is possible to validate analytical conditionsfor the motion switching in such a discontinuous systemThere are more simulations about such an oscillator to bediscussed in future
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research was supported by the National Natural ScienceFoundations of China (no 11471196 no 11571208)
References
[1] J P D Hartog ldquoForced vibrations with coulomb and viscousdampingrdquo Transactions of the American Society of MechanicalEngineers vol 53 pp 107ndash115 1930
[2] E S Levitan ldquoForced oscillation of a spring-mass systemhavingcombined Coulomb and viscous dampingrdquo The Journal of theAcoustical Society of America vol 32 pp 1265ndash1269 1960
[3] A F Filippov ldquoDifferential equations with discontinuous right-hand siderdquo in Fifteen Papers on Differential Equations vol 42of American Mathematical Society Translations Series 2 pp199ndash231 AmericanMathematical Society Providence RI USA1964
[4] A F Filippov Differential Equations with Discontinuous Right-Hand Sides Kluwer Academic Dordrecht The Netherlands1988
[5] J Awrejcewicz and P Olejnik ldquoStick-slip dynamics of a two-degree-of-freedom systemrdquo International Journal of Bifurcation
Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 19
and Chaos in Applied Sciences and Engineering vol 13 no 4 pp843ndash861 2003
[6] M Pascal ldquoSticking and nonsticking orbits for a two-degree-of-freedom oscillator excited by dry friction and harmonicloadingrdquoNonlinear Dynamics vol 77 no 1-2 pp 267ndash276 2014
[7] K Popp N Hinrichs andM Oestreich ldquoDynamical behaviourof a friction oscillator with simultaneous self and externalexcitationrdquo Sadhana vol 20 no 2 pp 627ndash654 1995
[8] M Oestreich N Hinrichs and K Popp ldquoBifurcation andstability analysis for a non-smooth friction oscillatorrdquo Archiveof Applied Mechanics vol 66 no 5 pp 301ndash314 1996
[9] A Stefanski J Wojewoda and K Furmanik ldquoExperimentaland numerical analysis of self-excited friction oscillatorrdquoChaosSolitons amp Fractals vol 12 no 9 pp 1691ndash1704 2001
[10] U Andreaus and P Casini ldquoFriction oscillator excited bymoving base and colliding with a rigid or deformable obstaclerdquoInternational Journal of Non-Linear Mechanics vol 37 no 1 pp117ndash133 2002
[11] J Awrejcewicz and L Dzyubak ldquoConditions for chaos occur-ring in self-excited 2-DOF hysteretic system with frictionrdquo inProceedings of the 13th International Conference on DynamicalSystemsTheory andApplications Łodz PolandDecember 2005
[12] A C Luo ldquoA theory for non-smooth dynamic systems on theconnectable domainsrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 10 no 1 pp 1ndash55 2005
[13] A C Luo ldquoImaginary sink and source flows in the vicinityof the separatrix of non-smooth dynamic systemsrdquo Journal ofSound and Vibration vol 285 no 1-2 pp 443ndash456 2005
[14] A C Luo Singularity and Dynamics on Discontinuous VectorFields vol 3 of Monograph Series on Nonlinear Science andComplexity Elsevier B V AmsterdamThe Netherlands 2006
[15] A C J Luo ldquoA theory for flow switchability in discontinuousdynamical systemsrdquo Nonlinear Analysis Hybrid Systems vol 2no 4 pp 1030ndash1061 2008
[16] A C J Luo Discontinuous Dynamical Systems Higher Educa-tion Press Beijing China Springer Berlin Germany 2012
[17] A C J LuoDiscontinuous Dynamical Systems on Time-VaryingDomains Higher Education Press Beijing China 2009
[18] A C J Luo and B C Gegg ldquoOn the mechanism of stickand non-stick periodic motion in a periodically forced linearoscillator with dry frictionrdquo ASME Journal of Vibration andAcoustics vol 128 pp 97ndash105 2006
[19] A C J Luo and Y Wang ldquoAnalytical conditions for motioncomplexity of a 2-DOF friction-induced oscillator movingon two oscillatorsrdquo in Proceedings of the ASME InternationalMechanical Engineering Congress and Exposition (IMECE rsquo09)pp 927ndash943 Lake Buena Vista Fla USA November 2009
[20] G Chen and J J Fan ldquoAnalysis of dynamical behaviors of adouble belt friction-oscillator modelrdquo Wseas Transactions onMathematics vol 15 pp 357ndash373 2016
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of