on metamodelling of wheel-rail contact in s&c
TRANSCRIPT

On metamodelling of wheel-rail contact in S&C
Rostyslav Skrypnyk – [email protected],Jens Nielsen, Magnus Ekh, Jim BrouzoulisSeptember 14-15, 2016 @NSRT
Chalmers University of Technology / CHARMEC

Background

Motivation
Sweden per annum200-300 millions SEK
(20 % of the overall maintenancecosts)
1/15

Motivation
Sweden per annum
200-300 millions SEK(20 % of the overall maintenance
costs)
1/15

Motivation
Sweden per annum200-300 millions SEK
(20 % of the overall maintenancecosts)
1/15

Background
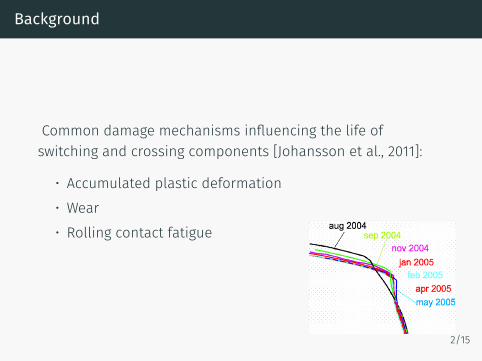
Common damage mechanisms influencing the life ofswitching and crossing components [Johansson et al., 2011]:
• Accumulated plastic deformation• Wear• Rolling contact fatigue
2/15

Background
Common damage mechanisms influencing the life ofswitching and crossing components [Johansson et al., 2011]:
• Accumulated plastic deformation
• Wear• Rolling contact fatigue
2/15

Background
Common damage mechanisms influencing the life ofswitching and crossing components [Johansson et al., 2011]:
• Accumulated plastic deformation• Wear
• Rolling contact fatigue
2/15
Background
Common damage mechanisms influencing the life ofswitching and crossing components [Johansson et al., 2011]:
• Accumulated plastic deformation• Wear• Rolling contact fatigue
2/15

Simulation methodology [Johansson et al., 2011]
vF
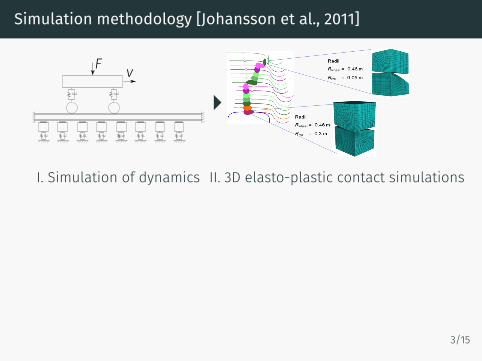
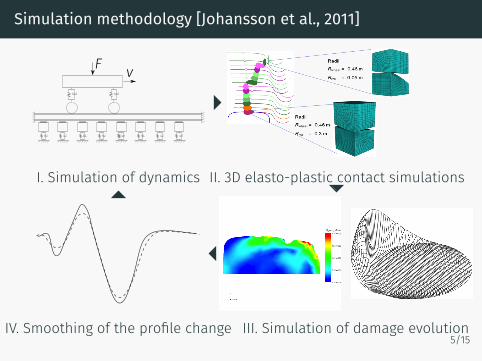
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change
3/15

Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics
II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change
3/15
Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change
3/15

Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolution
IV. Smoothing of the profile change
3/15

Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change3/15

Application of methodology in Haste, Germany
Comparison with field measurements:
• Comparison of measured and simulated profiles after fiveweeks of traffic
• Plastic deformation is initially the dominating damagemechanism, later wear dominates
• Good qualitative agreement
4/15

Application of methodology in Haste, Germany
Comparison with field measurements:
• Comparison of measured and simulated profiles after fiveweeks of traffic
• Plastic deformation is initially the dominating damagemechanism, later wear dominates
• Good qualitative agreement
4/15

Application of methodology in Haste, Germany
Comparison with field measurements:
• Comparison of measured and simulated profiles after fiveweeks of traffic
• Plastic deformation is initially the dominating damagemechanism, later wear dominates
• Good qualitative agreement
4/15

Application of methodology in Haste, Germany
Comparison with field measurements:
• Comparison of measured and simulated profiles after fiveweeks of traffic
• Plastic deformation is initially the dominating damagemechanism, later wear dominates
• Good qualitative agreement
4/15
Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change5/15

Simulation methodology [Johansson et al., 2011]
vF
I. Simulation of dynamics II. 3D elasto-plastic contact simulations
III. Simulation of damage evolutionIV. Smoothing of the profile change5/15

3D contact problem
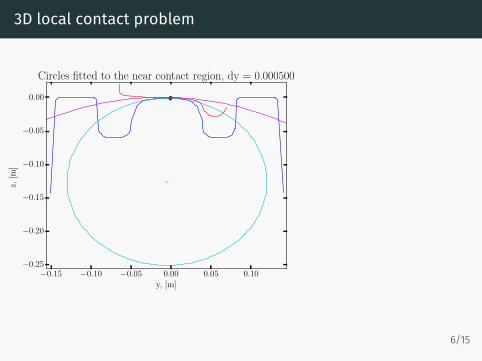
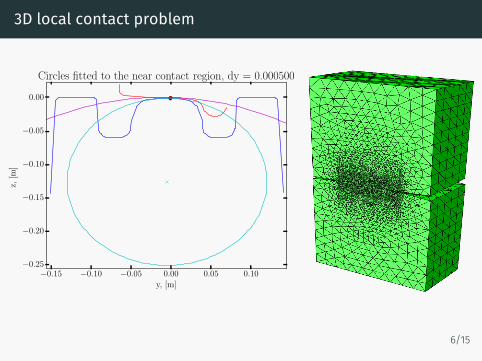
3D local contact problem
−0.15 −0.10 −0.05 0.00 0.05 0.10
y, [m]
−0.25
−0.20
−0.15
−0.10
−0.05
0.00
z,[m
]
Circles fitted to the near contact region, dy = 0.000500
6/15
3D local contact problem
−0.15 −0.10 −0.05 0.00 0.05 0.10
y, [m]
−0.25
−0.20
−0.15
−0.10
−0.05
0.00
z,[m
]
Circles fitted to the near contact region, dy = 0.000500
6/15
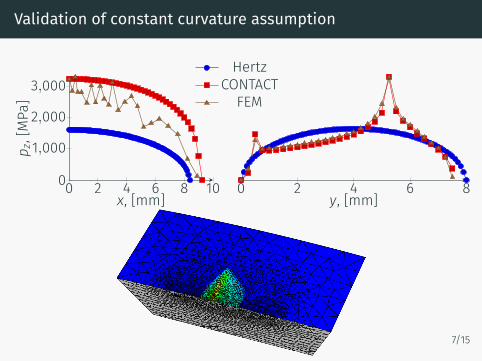
Validation of constant curvature assumption
0 2 4 6 8 100
1,000
2,000
3,000
x, [mm]
p z,[MPa]
HertzCONTACTFEM
0 2 4 6 8y, [mm]
7/15

Metamodel

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]
• Input:x =
[Rxw Ryw Rr N
]• Output:
g =[a b p0
]Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b
8/15

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]• Input:
x =[Rxw Ryw Rr N
]
• Output:g =
[a b p0
]Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b
8/15

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]• Input:
x =[Rxw Ryw Rr N
]• Output:
g =[a b p0
]
Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b
8/15

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]• Input:
x =[Rxw Ryw Rr N
]• Output:
g =[a b p0
]Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b
8/15

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]• Input:
x =[Rxw Ryw Rr N
]• Output:
g =[a b p0
]Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b 8/15

Definition
Metamodel g is a model of a model, i.e. a simplified model ofan actual model f , and metamodelling is the process ofgenerating such models.
f = [a b p0]• Input:
x =[Rxw Ryw Rr N
]• Output:
g =[a b p0
]Based on Hertzian theory, propose expressions for theresponses:
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b 8/15
Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Metamodelling procedure
Metamodelling involves the following steps:
1. Choosing an experimental sampling method forgenerating data (e.g. full factorial design, hand selected,central composite design)
2. Generating data (running simulations, performingexperiments)
3. Choosing a model to represent the data (e.g. polynomial,network of neurons)
4. Fitting the model to the observed data (e.g. least squaresregression, backpropagation)
9/15

Interpolation procedure
Interpolation involves the following steps:
X Choosing an experimental sampling method forgenerating data
X Generating dataX Choosing an interpolation method× Fitting the model to the observed data
10/15

Interpolation procedure
Interpolation involves the following steps:
X Choosing an experimental sampling method forgenerating data
X Generating dataX Choosing an interpolation method× Fitting the model to the observed data
10/15

Interpolation procedure
Interpolation involves the following steps:
X Choosing an experimental sampling method forgenerating data
X Generating data
X Choosing an interpolation method× Fitting the model to the observed data
10/15

Interpolation procedure
Interpolation involves the following steps:
X Choosing an experimental sampling method forgenerating data
X Generating dataX Choosing an interpolation method
× Fitting the model to the observed data
10/15

Interpolation procedure
Interpolation involves the following steps:
X Choosing an experimental sampling method forgenerating data
X Generating dataX Choosing an interpolation method× Fitting the model to the observed data
10/15

Results

Interpolation model [Shepard, 1968] vs FEM
10 12 14 16 18 2010
15
20 R2 = −0.273
Semi-axis a from Abaqus, [mm]Semi-axisafrominterpolation,[mm]
4 6 8 10
4
6
8
10 R2 = 0.505
Semi-axis b from Abaqus, [mm]Semi-axisbfrominterpolation,[mm]
11/15

Interpolation model [Shepard, 1968] vs FEM
500 1,000 1,5002,0002,5003,000
1,000
2,000
3,000R2 = 0.46
Max pressure p0 from Abaqus, [MPa]
Maxpressurep 0frominterpolation,[MPa]
12/15

Metamodel vs FEM (preliminary results)
10 12 14 16 18 2010
15
20 R2 = −0.207
Semi-axis a from Abaqus, [mm]Semi-axisafrommetam
odel,[mm]
4 6 8 10
4
6
8
10 R2 = 0.734
Semi-axis b from Abaqus, [mm]Semi-axisbfrommetam
odel,[mm]
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b
13/15

Metamodel vs FEM (preliminary results)
500 1,000 1,5002,0002,5003,000
1,000
2,000
3,000R2 = 0.58
Max pressure p0 from Abaqus, [MPa]Maxpressurep 0frommetam
odel,[MPa]
a = α1 + α2Rxw + α3Ryw + α4Rr + α5Nb = α6 + α7Rxw + α8Ryw + α9Rr + α10N
p0 = α11Na · b 14/15

Conclusions

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15
Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel
• Extend it to handle cases involving non-linear materialresponse
15/15

Concluding remarks
• Established framework for creating, calibrating andevaluating the metamodels
• Eliminated the assumption of constant radii of curvaturein 3D FE models
• Assessed the accuracy of the current metamodel
Outlook
• Improve the accuracy of the metamodel• Extend it to handle cases involving non-linear materialresponse
15/15

Thank you for attention!
Johansson, A., Pålsson, B., Ekh, M., Nielsen, J. C. O., Ander, M.K. A., Brouzoulis, J., and Kassa, E. (2011).Simulation of wheel-rail contact and damage in switches& crossings.Wear, 271(1-2):472–481.
Shepard, D. (1968).A two-dimensional interpolation function forirregularly-spaced data.In Proceedings of the 1968 23rd ACM national conference,pages 517–524. ACM.