operating systems, concurrency and time - tu/ejohanl/educ/osrtws/04 mutualexclusion.pdf17-dec-17 1...
TRANSCRIPT

17-Dec-171
mutual exclusion
Johan Lukkien
Operating Systems, Concurrency and Time
Johan J. Lukkien, [email protected]/e Informatica, System Architecture and Networking

Questions• Mutual exclusion is apparently an important concern or problem
– where does it occur, in which contexts?– what are solutions and approaches?– what are performance concerns?– what is the effect of blocking on timing?
17-Dec-17
Johan J. Lukkien, [email protected]/e Informatica, System Architecture and Networking
2

3
Mutual exclusion• One way of looking at the bridge problem is to regard the bridge as
a shared resource– acquired by cars from both directions
• We say– ‘the bridge is accessed under mutual exclusion’– or: ‘the entry/exit actions form a critical section’
• Programming mutual exclusion means, in fact, turning sequences of atomic actions into a single transaction that can be regarded as atomic– using locking/unlocking as, for example, through spinlocks
• ‘low-level synchronization’– or using the concept of a (binary) semaphore or mutex

Mutual exclusion• What to protect?
– resources, to achieve non-interrupted interaction• memory locations, computing resources, network
• How to protect?– protect the instruction sequences that access the resource
• admitting just one at any time• protecting a (set of) instruction sequence(s) means that everything
accessed from that sequence is lumped together as a shared resource– choose a reasonable granularity, e.g. in sharing data
• associate a locking mechanism with data items• decide which data to protect together
• Which method of exclusion?– ‘high-level’ primitives delivered by the OS– ‘low-level’ primitives like spin-locks
4

5
Where is low-level synchronization relevant?• When the overhead for queueing the blocking process and switching
to another one is too much• When such queueing is being implemented
• Both cases happen frequently inside the implementation of the kernel– typically, multiprocessor implementations of shared data structures
(scheduler, process management, kernel activities)– device drivers– interrupt service routines
• particularly, nested interrupts
Requirement: locking periods must be very brief and bounded!
• Spinlocks are also available to multithreaded programs– particularly, with modern hyper threaded processors or multiple cores

pthread spinlock API• Declare and initialize a spinlock• Shared by threads in same process, or via shared memory across
processes (pshared)• Responsibility of programmer to avoid deadlock
– though pthread_spin_lock() returns EDEADLK
6
#include <pthread.h>int pthread_spin_init(pthread_spinlock_t *lock, int pshared); /* pshared: possibly allocate in shared process space */int pthread_spin_destroy(pthread_spinlock_t *lock);int pthread_spin_lock(pthread_spinlock_t *lock);int pthread_spin_trylock(pthread_spinlock_t *lock); /* return EBUSY if busy */int pthread_spin_unlock(pthread_spinlock_t *lock);

7
Synchronization with spinlocks • What is needed is to perform two actions together as a single atomic step,
as provided with spinlocks
• Example: Test&Set (hardware instructions by the processor):– func Test&Set (lock): <old := lock; lock := true; return old>– <lock := false>
• Use shared variable lock (init false)
PX = while true do StateX := 1;StateX := 2;while Test&Set (lock)do skip od;StateX := 3; StateX := 4;lock := false;StateX := 5
od
PY = while true do StateY := 1;StateY := 2;while Test&Set (lock)do skip od;StateY := 3; StateY := 4;lock := false;StateY := 5
od
||
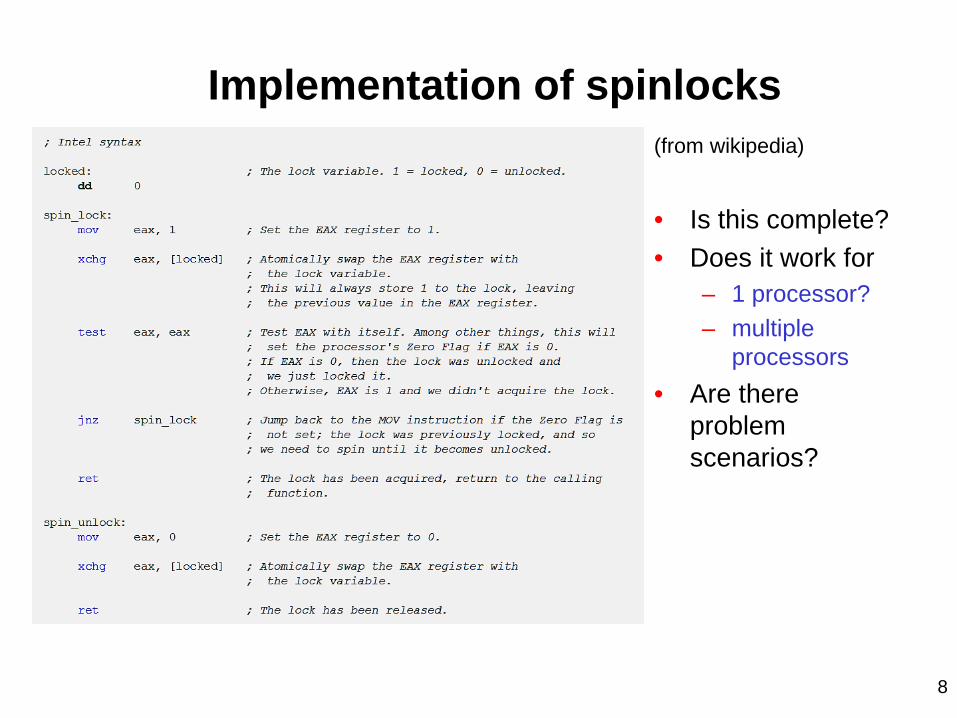
Implementation of spinlocks(from wikipedia)
• Is this complete?• Does it work for
– 1 processor?– multiple
processors• Are there
problem scenarios?
8
9
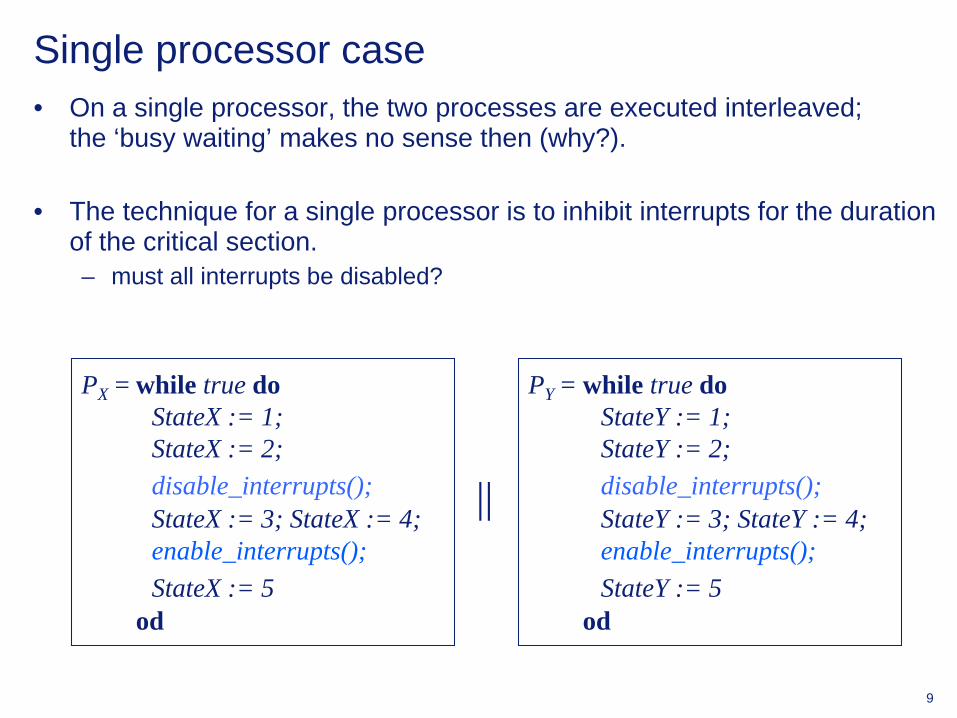
Single processor case• On a single processor, the two processes are executed interleaved;
the ‘busy waiting’ makes no sense then (why?).
• The technique for a single processor is to inhibit interrupts for the duration of the critical section.– must all interrupts be disabled?
PX = while true do StateX := 1;StateX := 2;disable_interrupts();StateX := 3; StateX := 4;enable_interrupts();StateX := 5
od
PY = while true do StateY := 1;StateY := 2;disable_interrupts();StateY := 3; StateY := 4;enable_interrupts();StateY := 5
od
||

Exclusion with multiple processors• A processor P requiring exclusion needs to block interference from P
itself and from other processors– respectively, using interrupt disabling and spinlocks
• why does interrupt disabling work? • in which order does this have to occur?
• The idea with spinlocks is that the common case is that of no contention. Resources are wasted in case of contention. If there is contention, – an implementation that continuously assigns a new value to a variable also
triggers the cache coherency infrastructure continuously.– P is blocked and wasting cycles.
• be selective in what is being blocked: only those actions that interfere with what the spinlock is protecting
• could yield the processor temporarily while waiting
• We need predictability in implementations– make the implementation fair and/or prioritized
• We need to support nesting10

First approximation: multi-processor
• spinlock (lock):disable_interrupts(); /* of ‘this’ processor only */while Test&Set(lock) do skip od
• unlock (lock)lock := false; enable_interrupts()
11

Second approximation: cache friendly
• spinlock (lock)disable_interrupts(); while Test&Set(lock) do
while lock do skip od od
• unlock (lock)lock := false; enable_interrupts()
12

Third approximation: nesting
• Just enabling interrupts is wrong in case of nesting– why?
• Local (recursive) context management is a better structuring– requires strict nesting of spinlock() / unlock() for different locks
• spinlock (lock):OldContext := disable_interrupts(); while Test&Set(lock) do
while lock do skip od od
• unlock (lock):lock := false; restore_context (OldContext)
• (OldContext is a fresh local variable of the caller)13

Fourth approximation: reducing local blocking
• In case of contention, the local processor is blocked. This can be reduced.
• spinlock (lock):OldContext := disable_interrupts(); while Test&Set(lock) do
while lock do restore_context (OldContext); “possibly: pause sometime or suspend”;OldContext := disable_interrupts();
od od
• unlock (lock):lock := false; restore_context (OldContext)
14
15
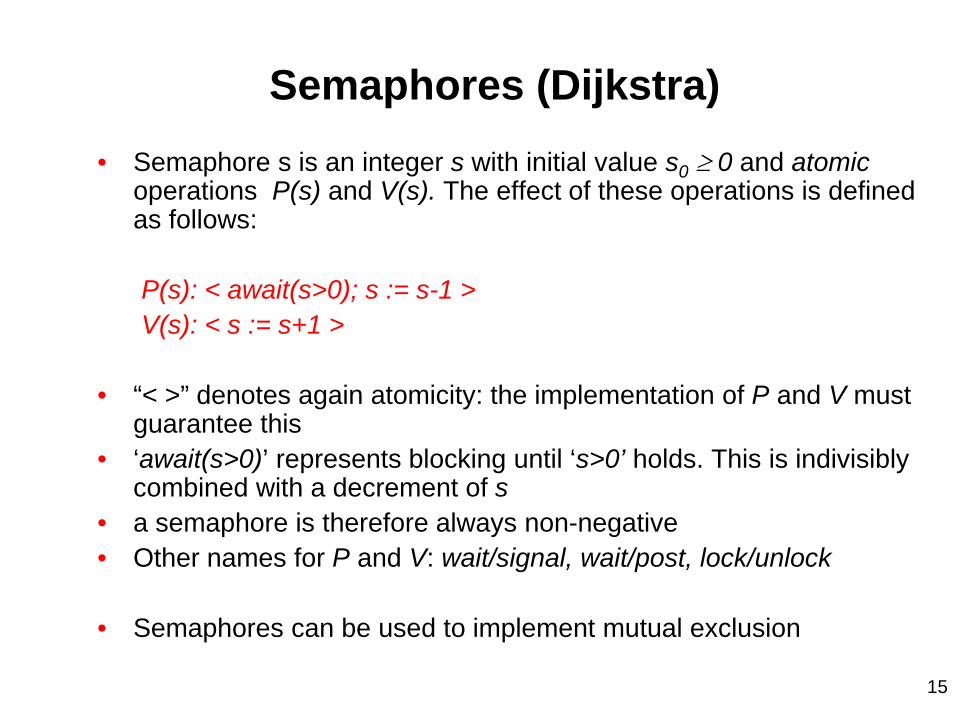
Semaphores (Dijkstra)• Semaphore s is an integer s with initial value s0 ≥ 0 and atomic
operations P(s) and V(s). The effect of these operations is defined as follows:
P(s): < await(s>0); s := s-1 >V(s): < s := s+1 >
• “< >” denotes again atomicity: the implementation of P and V must guarantee this
• ‘await(s>0)’ represents blocking until ‘s>0’ holds. This is indivisibly combined with a decrement of s
• a semaphore is therefore always non-negative• Other names for P and V: wait/signal, wait/post, lock/unlock
• Semaphores can be used to implement mutual exclusion

16
Example• Let s0 = 1• At most one process can ‘pass’ the semaphore
– two processes passed would mean the semaphore was decreased twice– hence, the value would be negative
• This semaphore s can only be 1 or 0 because of the behavior of the program– therefore, other terminology is sometimes used, e.g. lock() / unlock()
PX = while true do StateX := 1;StateX := 2;P(s);StateX := 3; StateX := 4;V(s);StateX := 5
od
PY = while true do StateY := 1;StateY := 2;P(s);StateY := 3; StateY := 4;V(s);StateY := 5
od
||critical section
17
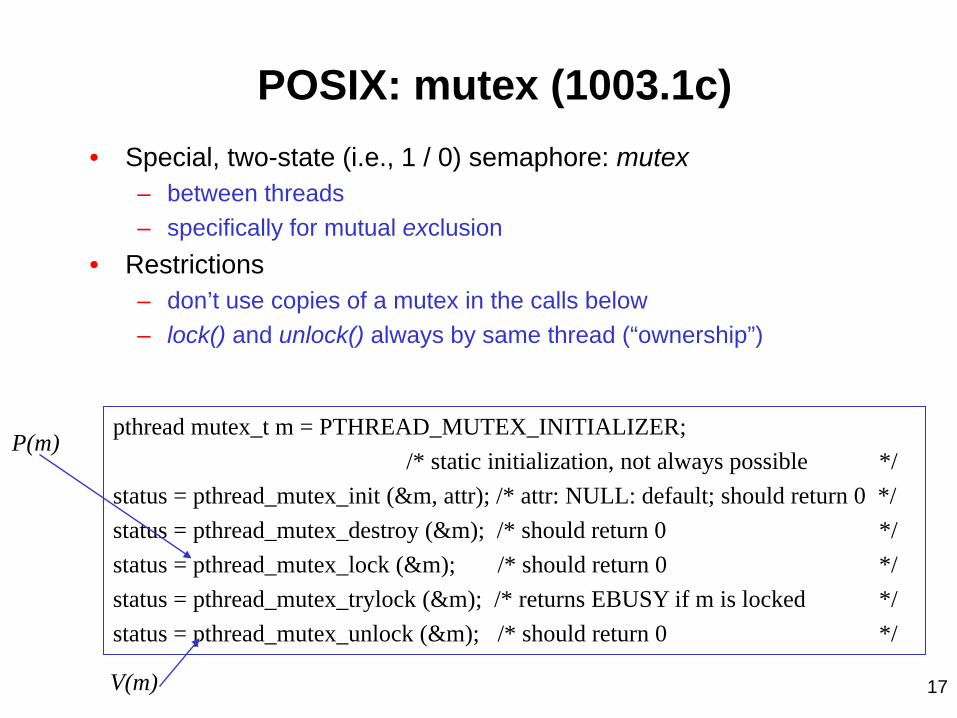
POSIX: mutex (1003.1c)• Special, two-state (i.e., 1 / 0) semaphore: mutex
– between threads– specifically for mutual exclusion
• Restrictions– don’t use copies of a mutex in the calls below– lock() and unlock() always by same thread (“ownership”)
pthread mutex_t m = PTHREAD_MUTEX_INITIALIZER;/* static initialization, not always possible */
status = pthread_mutex_init (&m, attr); /* attr: NULL: default; should return 0 */status = pthread_mutex_destroy (&m); /* should return 0 */ status = pthread_mutex_lock (&m); /* should return 0 */status = pthread_mutex_trylock (&m); /* returns EBUSY if m is locked */status = pthread_mutex_unlock (&m); /* should return 0 */
P(m)
V(m)

18
ExercisesM.1 The implementation given for Spinlock() was not fair. Can you find under which circumstances this unfairness may lead to starvation? Can you make it more fair by adding some more state information?
M.2 Instead of Test&Set(), other atomic operations are sometimes provided. Examples are:• Fetch&Add (x): <prev := x; x := x+1; return(prev)>• Swap(x,y): <t := x; x := y; y := t>Make implementations of Spinlock() and Unlock() using these primitives.
M.3 The order in the implementation of Spinlock() was to first disable interrupts and then acquire the lock. Could it be the other way round? Explain why, or why not. Is the order in Unlock() relevant? And what if a process/thread can be assigned to another processor?

19
ExercisesM.4 Semaphore or Mutex implementations need a data structure to record the semaphore state, including a list of waiters. Give a pseudo code for such an implementation and explain where exclusion is required. Which exclusion method should be used there?
M.5 Suppose we do not disable interrupts in the Spinlock() implementation. Explain potential problems.
M.6 Suppose a process (or thread, interrupt routine) acquires two spinlocks, and other processes do the same. Show how this can lead to a deadlock. Propose a solution to this problem.

Reducing blocking and deadlock
• A complete disabling of interrupts is quite heavy and often not necessary. – Instead, an interrupt level is used which is part of the current processor
state. Only tasks/interrupts higher than this level may interrupt the current execution.
– For this to work, these higher interrupts must not access the spinlock or the protected resources.
• In order to avoid deadlock, locks must be required in fixed order. This can be achieved, for example, by a serial ID.
• Fairness can be achieved using Lamports’ ticket algorithm. This is straightforward using Fetch&Add as a primitive but can be implemented using Test&Set as well. Fair spinlocks are also called queued spinlocks.
20

Priority• Scheduling of threads is preemptive, and
priority-based
• Priority: an intermediate between application and OS– the selected thread is the one with the highest
priority– does not always reflect importance, but is
used to control schedulability
• Separation of concerns: policy and mechanism– the programmer, or the OS, assigns priority
• they do this according to a certain policy, they know what is best
– the OS knows how to implement priority based scheduling
• the mechanism21
OS
Application
Knows the policy
Knows the mechanism
priority

Mars Rover Pathfinder• July 4, 1997, landing on Mars• After a few days into the mission random
resets occurred– after start of gathering meteorological data
• Attributed to ‘software glitches’ or ‘system overload’
• OS: VxWorks
• Cause: shared resource: information bus– high priority task: moves important information– low priority meteorological data gathering task: gets interrupted by a
middle priority, unrelated task
– a watchdog reset is triggered upon a long delay of the high priority task
– .... priority inversion– .... forgot to declare the correspondent semaphore as ‘priority ceiling’ (or
inheritance)17-Dec-17 Johan J. Lukkien, [email protected]
TU/e Informatica, System Architecture and Networking22

Priority inversion
23
• A low priority job obtains a resource; a high priority job waits on it
• A middle priority job pre-empts the low priority job– the high priority job now waits on the middle priority job– ... and executes effectively at the low priority
• Unbounded inversion
high priority job
waiting
time
resource blocked by low priority job
middle priority job executing
high priority job
waiting
time
resource blocked by low priority job
Concurrency control protocols• Concurrency control protocols manage concurrent and
competitive access to resources– they manipulate priority for this purpose– but may also put restrictions
• A (concurrency control) policy should– at least bound the inversion time– adhere to the job priorities as good as possible
24

Priority inheritance protocol• The priority of a job P is
dynamically adjusted to be the maximum of– the priority of any job that is blocked
on the allocated resources of P– (... and its own priority)
– this adjustment is done transitively, i.e., if the priority of a waiter becomes adjusted then this adjustment is forwarded
• ...middle priority jobs will wait now.
25
high priority job
waiting
time
resource blocked by low priority job
low priority job increases
priority
middle priority job waiting
push-through blocking

Sources and types of blocking• Direct blocking
– another job holds the resource• Push-through blocking
– job A suffers push-through blocking if a lower priority job changes priority temporarily to a higher one than A
• due to a specific concurrency control protocol • Chained blocking (transitive blocking)
– sequence of blockings• job A blocks on (resource R0 held by) job B• job B blocks on (resource R1 held by) job C
26

Chained blocking
27

Sources and types of blocking• Direct blocking
– another job holds the resource• Push-through blocking
– job A suffers push-through blocking if a lower priority job changes priority temporarily to a higher one than A
• due to a specific concurrency control protocol • Chained blocking (transitive blocking)
– sequence of blockings• job A blocks on (resource R0 held by) job B• job B blocks on (resource R1 held by) job C
• Deadlock: – circular waiting (no chain but circle), greedy consumers – blocking critical sections
• Avoidance blocking– blocking according to a strategy to avoid some of the above
28

(immediate) Priority Ceiling• Each resource (mutex) has a ceiling which is the maximum priority
of any job ever using it
• Rule:– the dynamic priority of a job is the maximum ceiling of any resource it
has acquired• hence, adjusted upon Lock() and Unlock()
• Properties, on a single processor (!):– this simply means that a job using a resource cannot be pre-empted
by any other job that uses the same resource• no need to represent a queue of waiters• while executing, the resources of a job are free (mimics an ‘interrupt level’)
– avoids cyclic deadlock– avoids chained blocking– wait on at most one lower priority job
29

30
POSIX: mutex (1003.1c-2008)Defining the attribute• the type (deadlocking, deadlock-detecting, recursive, etc).• the robustness (what happens when the owner dies)• the process-shared attribute (for sharing a mutex across process boundaries).• the protocol (concurrency control).• the priority ceiling (max priority of a user of m – new dynamic priority of caller).
pthread mutex_t m = PTHREAD_MUTEX_INITIALIZER;/* static initialization, not always possible */
status = pthread_mutex_init (&m, attr); /* attr: NULL: default; should return 0 */status = pthread_mutex_destroy (&m); /* should return 0 */ status = pthread_mutex_lock (&m); /* should return 0 */status = pthread_mutex_trylock (&m); /* returns EBUSY if m is locked */status = pthread_mutex_unlock (&m); /* should return 0 */

ExercisesM.7 Consider 4 repetitive tasks, A, B, C and D sharing two resources, r1and r2 protected by mutexes m1 and m2. Jobs of the 4 tasks are as follows.
– A: d; Lock(m1); d; Lock(m2); d; Unlock(m1); d; Unlock(m2)– B: d; Lock(m2); d; Lock(m1); d; Unlock(m1); d; Unlock(m2)– C: d; Lock(m1); d; Unlock(m1)– D: d; Lock(m2); d; Unlock(m2)
Here, d refers to a variable delay representing some idleness or computing (not really relevant). Priority of A=4, B=3, C=2, D=1 (4 is highest).
Draw Gantt charts in case of no concurrency control, priority inheritance and priority ceiling. Show occurrence of inversion, chained blocking and deadlock and show the dynamic priority.
31