optimal power flow and frequency control · power flow model e.g. dc/ac power flow advantages of...
TRANSCRIPT
Optimal Power Flow and Frequency Control
Steven Low
Computing + Math Sciences
Electrical Engineering
NSF Workshop
November 2013

Acknowledgment
Caltech S. Bose, M. Chandy, J. Doyle, M. Farivar, L. Gan, B.
Hassibi, E. Mallada, T. Teeraratkul, C. Zhao
Former L. Chen (Colorado), D. Gayme (JHU), J. Lavaei
(Columbia), L. Li (Harvard), U. Topcu (Upenn)
SCE A. Auld, J. Castaneda, C. Clark, J. Gooding, M.
Montoya, R. Sherick

network of
billions of active
distributed energy
resources (DERs)
DER: PV, wind tb, EV, storage, smart appliances
Solar power over land:
> 20x world energy demand

Risk: active DERs introduce rapid random
fluctuations in supply, demand, power quality
increasing risk of blackouts
Opportunity: active DERs enables realtime
dynamic network-wide feedback control,
improving robustness, security, efficiency
Caltech research: distributed control of networked DERs
• Foundational theory, practical algorithms, concrete
applications
• Integrate engineering and economics
• Active collaboration with industry

ligence
everywhere
Our approach
Endpoint based control Self-manage through local sensing, communication,
control
Real-time, scalable, closed-loop, distributed, robust
Local algorithms with global perspective Holistic framework with global objectives
Decompose global objectives into local algorithms
Control and optimization framework Theoretical foundation for a holistic framework that
integrates engineering + economics
Systematic algorithm design

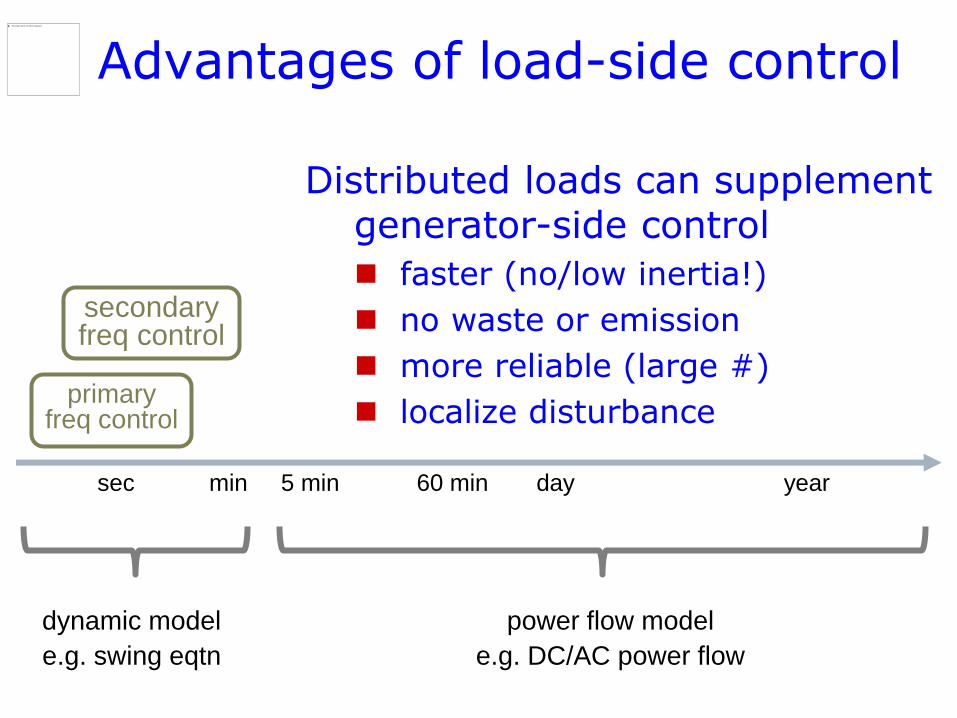
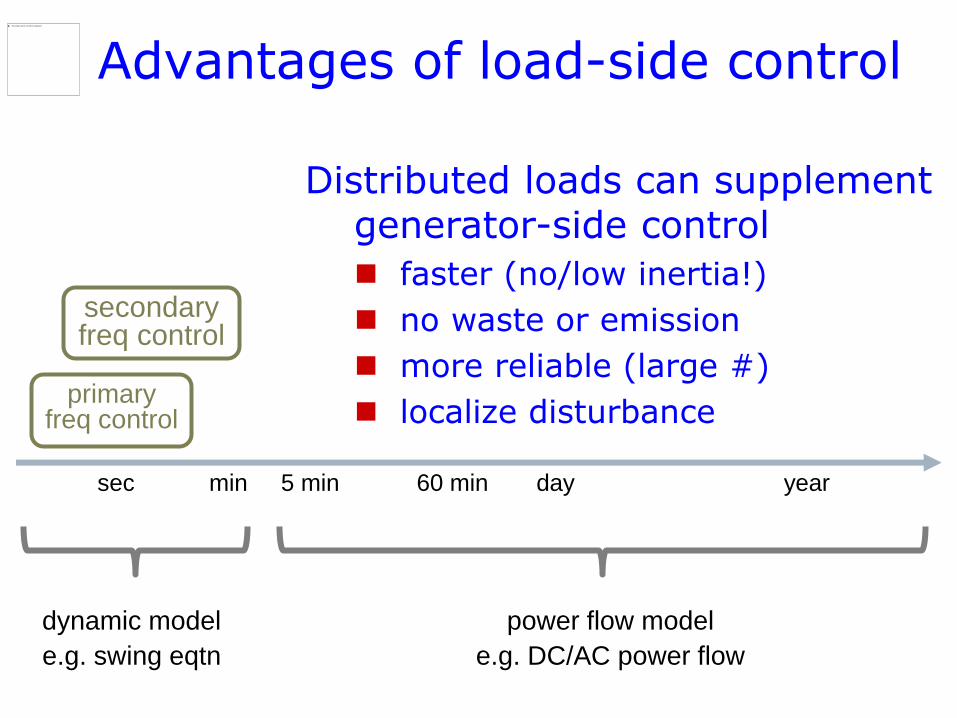
dynamic model
e.g. swing eqtn
sec min 5 min 60 min day year
primary freq control
secondary freq control
power flow model
e.g. DC/AC power flow
Example: frequency control
economic dispatch
unit commitment
Frequency control is traditionally done on generation side
dynamic model
e.g. swing eqtn
sec min 5 min 60 min day year
primary freq control
secondary freq control
power flow model
e.g. DC/AC power flow
Advantages of load-side control
Distributed loads can supplement generator-side control
faster (no/low inertia!)
no waste or emission
more reliable (large #)
localize disturbance
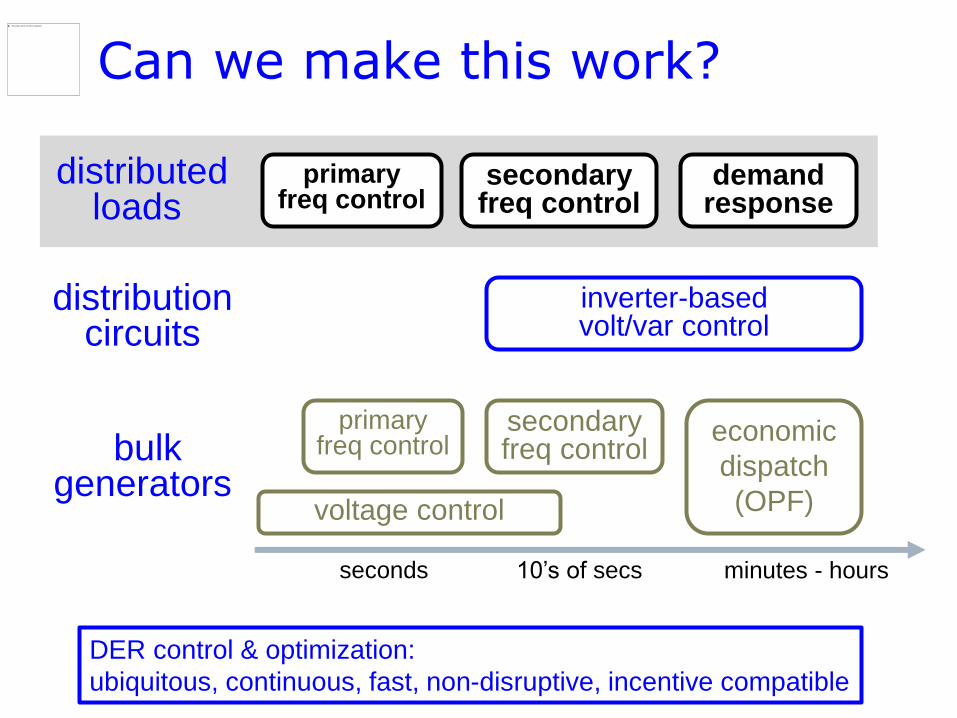
seconds 10’s of secs minutes - hours
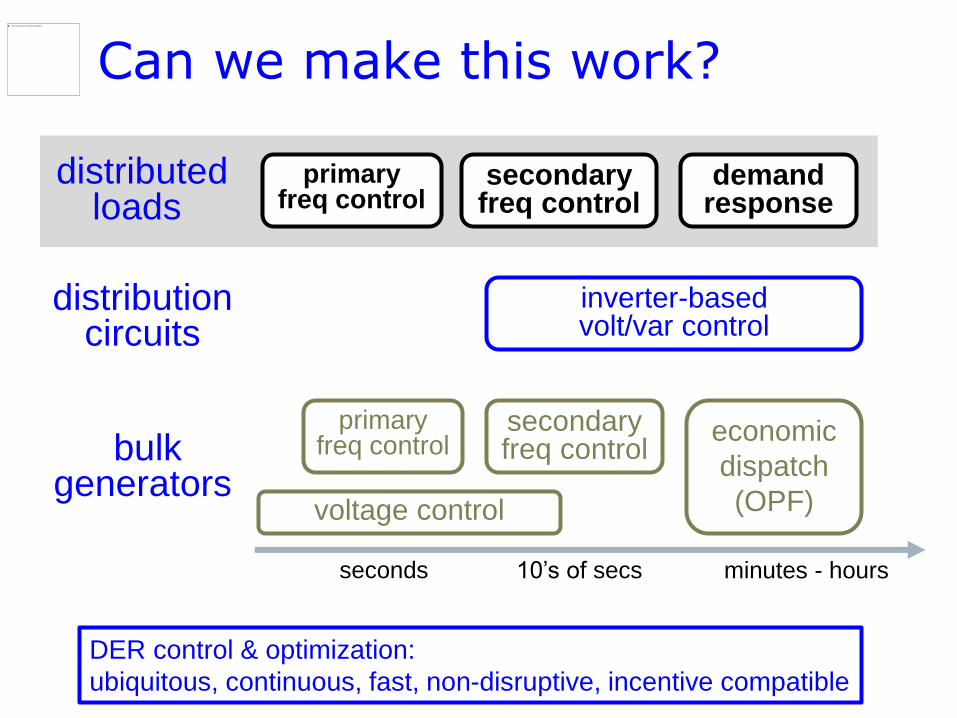
primary freq control
secondary freq control
economic
dispatch
(OPF)
bulk generators
inverter-based volt/var control
distribution circuits
primary freq control
secondary freq control
demand response
distributed loads
voltage control
Can we make this work?
DER control & optimization:
ubiquitous, continuous, fast, non-disruptive, incentive compatible

Outline
Convex relaxation of optimal power flow
Guarantee on solution quality, structural understanding, systematic alg design
Load-side frequency control
Ubiquitous, distributed, fast, efficient

Optimal power flow (OPF)
OPF underlies many applications
Unit commitment, economic dispatch
State estimation
Contingency analysis
Feeder reconfiguration, topology control
Placement and sizing of capacitors, storage
Volt/var control in distribution systems
Demand response, load control
Electric vehicle charging
Market power analysis
…
Optimal power flow (OPF)
Problem formulation Carpentier 1962
Computational techniques Dommel & Tinney 1968 Surveys: Huneault et al 1991, Momoh et al 2001,
Pandya et al 2008, FERC 2012-13
Bus injection model: SDP relaxation Bai 2008, 2009, Lavaei 2012 Bose 2011, Zhang 2011, Sojoudi 2012, Bose 2012 Lesieutre 2011
Branch flow model: SOCP relaxation Baran & Wu 1989, Chiang & Baran 1990, Taylor
2011, Farivar SGC2011 Farivar TPS2013, Li SGC2012, Gan CDC2012, Bose
2012
Outline
Convex relaxation of optimal power flow
Problem formulation
Feasible sets, relaxations, equivalence
Load-side frequency control
Ubiquitous, distributed, fast, efficient
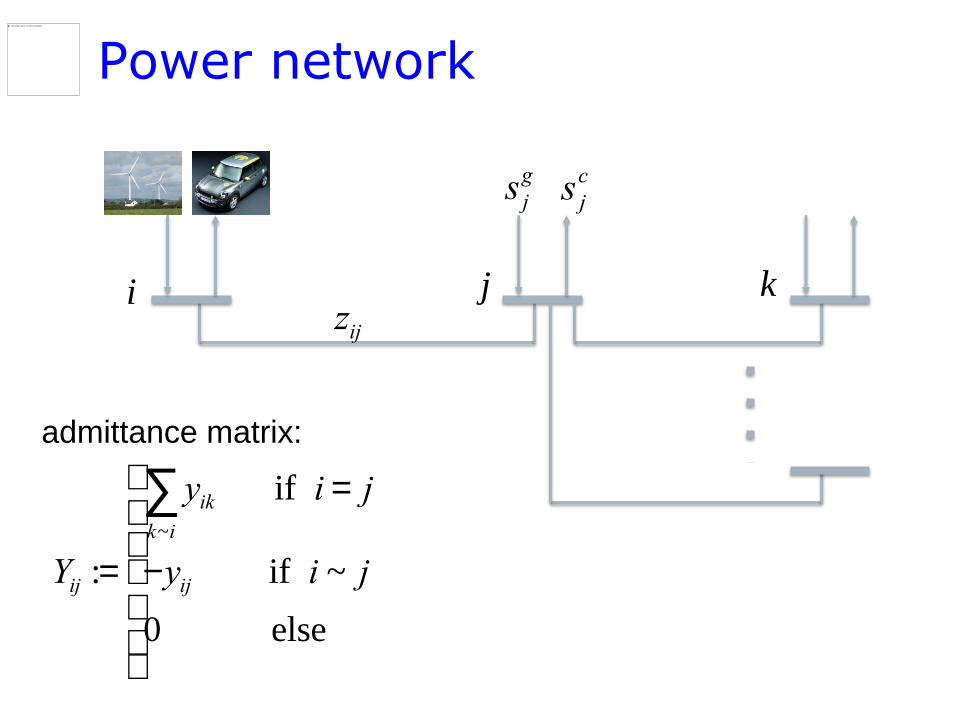
Power network
i j k
s j
gs j
c
zij
admittance matrix:
Yij :=
yik
k~i
å if i = j
-yij if i ~ j
0 else
ì
í
ïï
î
ïï

Bus injection model
I = YV
s j = VjI j
* for all j
admittance matrix:
Yij :=
yik
k~i
å if i = j
-yij if i ~ j
0 else
ì
í
ïï
î
ïï
I j : nodal current
Vj : voltage
s j = s j
g - s j
c
power balance
Kirchhoff law
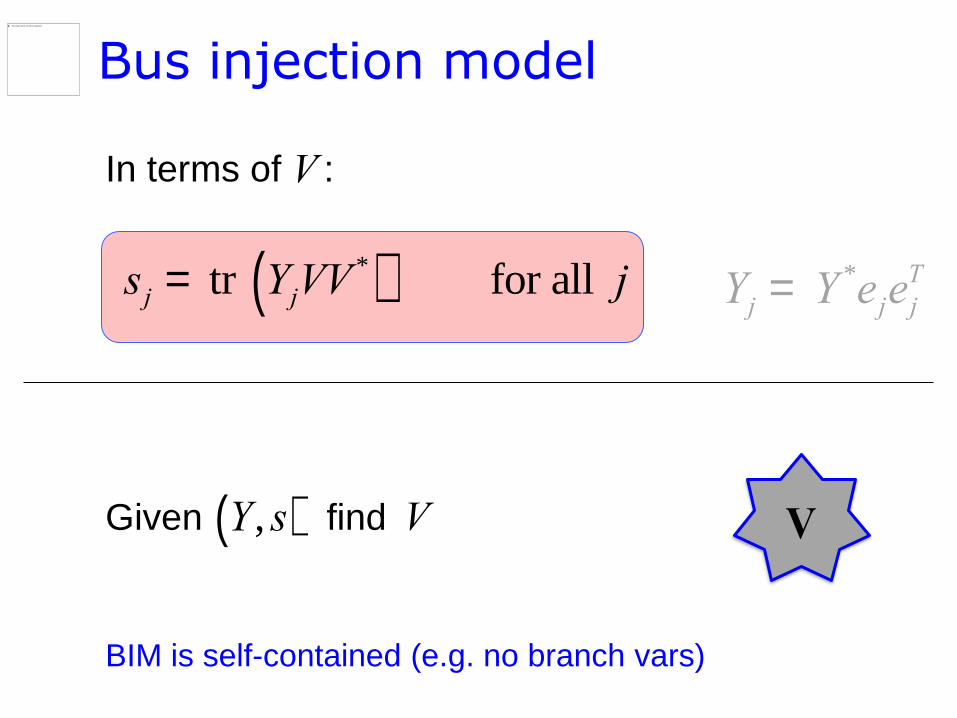
Bus injection model
s j = tr YjVV *( ) for all j
Given find Y, s( ) V V
In terms of : V
Yj = Y *e je j
T
BIM is self-contained (e.g. no branch vars)
quadratic cost
power flow equation
Bus injection model: OPF
min V *CV
over V, s( )
subject to s j £ s j £ s j V j £ |Vj | £ V j
s j = tr Yj
HVV H( )

quadratic cost
power flow equation
Bus injection model: OPF
min V *CV
over V, s( )
subject to s j £ s j £ s j V j £ |Vj | £ V j
s j = tr Yj
HVV H( )
quadratic cost
power flow equation
Bus injection model: OPF
min V *CV
over V, s( )
subject to s j £ s j £ s j V j £ |Vj | £ V j
s j = tr Yj
HVV H( )
min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j
OPF we study
quadratically constrained QP (QCQP)
nonconvex, NP-hard
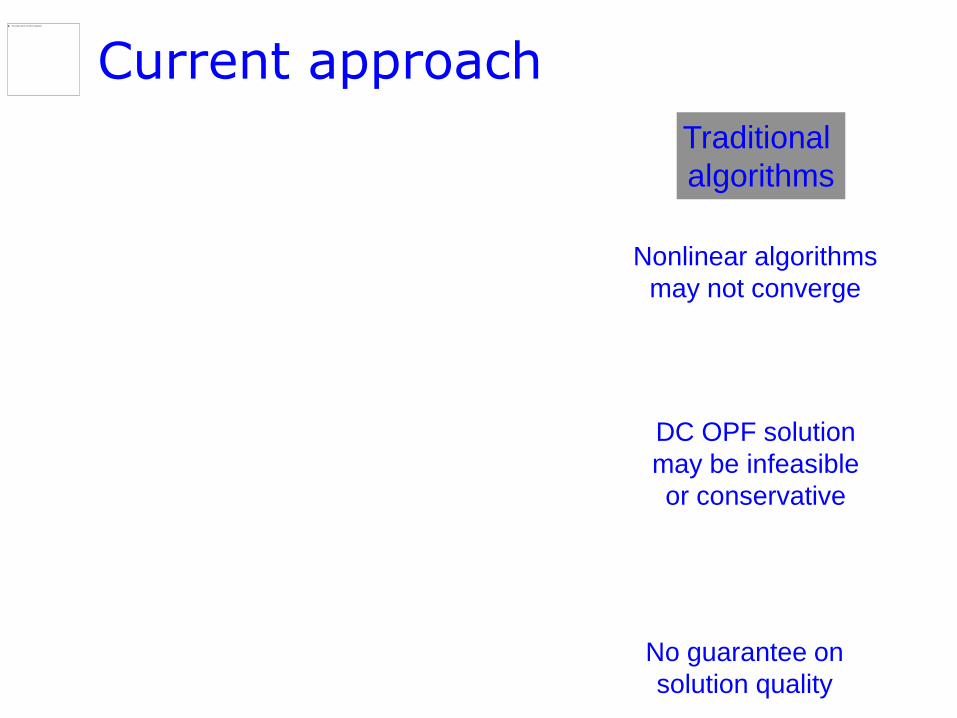
Current approach
always converge, fast Nonlinear algorithms
may not converge
Yes
global optimal No guarantee on
solution quality
Algorithms based on
convex relaxation
Traditional
algorithms
feasible ?
heuristics
w/ guarantee
DC OPF solution
may be infeasible
or conservative
No

Other features
Security constrained OPF Solve for operating points after each single
contingency (N-1 security)
Unit commitment Discrete variables
Stochastic OPF Chance constraints Pr(bad event) <
Time correlation Load (buildings, PEV), generation (ramp, wind)
Other constraints Line flow, line loss, stability limit, …
e
… OPF in practice is a lot harder

Outline
Convex relaxation of optimal power flow
Problem formulation
Feasible sets, relaxations, equivalence
Load-side frequency control
Ubiquitous, distributed, fast, efficient

Basic idea
min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j
V
• All complexity due to nonconvexity of V • Relaxations:
• design convex supersets of V
• minimize cost over convex supersets
• Exact relaxation: optimal solution of relaxation
happens to lie in V (when?)
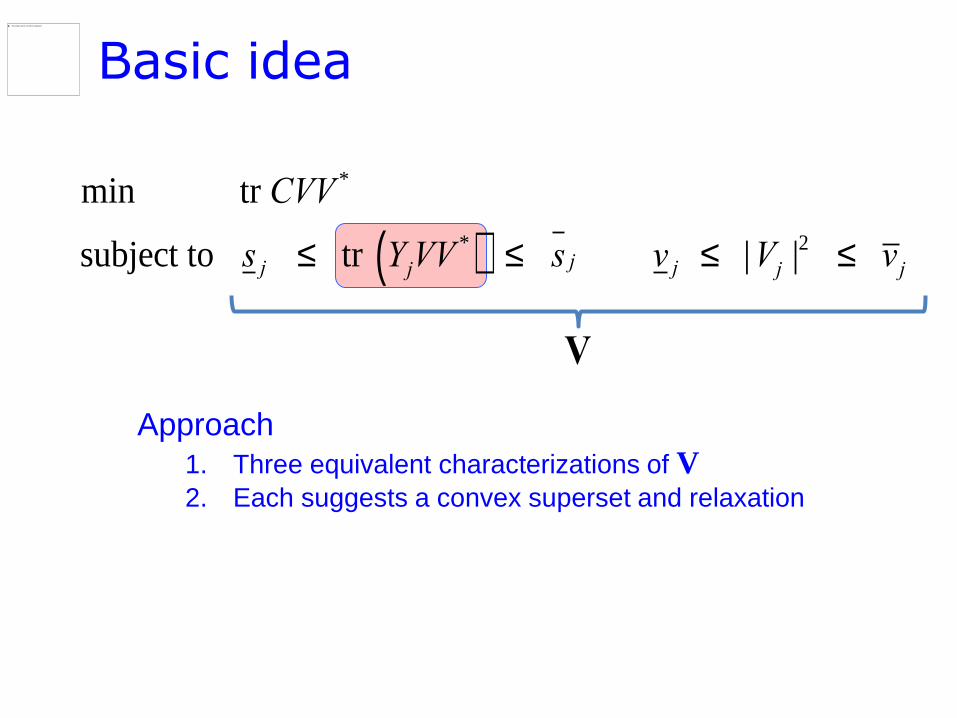
Basic idea
min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j
V
Approach
1. Three equivalent characterizations of V
2. Each suggests a convex superset and relaxation

min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j
min tr CW
subject to s j £ tr YjW( ) £ s j vi £ Wii £ vi
W ³ 0, rank W =1
Equivalent problem:
Feasible sets
convex in W
except this constraint
quadratic in V
linear in W !!

min tr CW
subject to s j £ tr YjW( ) £ s j vi £ Wii £ vi
W ³ 0, rank W =1
Equivalent problem:
Feasible sets
SDP relaxation
min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j

Feasible sets
idea: W = VV *

Feasible set
y jk
*
k:k~ j
å Vj
2
-VjVk
*( ) : only Vj
2
and VjVk
*
corresponding to edges ( j, k) in G!
Wjj Wjklinear in ! Wjj,Wjk( )
min tr CVV *
subject to s j £ tr YjVV *( ) £ s j v j £ |Vj |2 £ v j
V
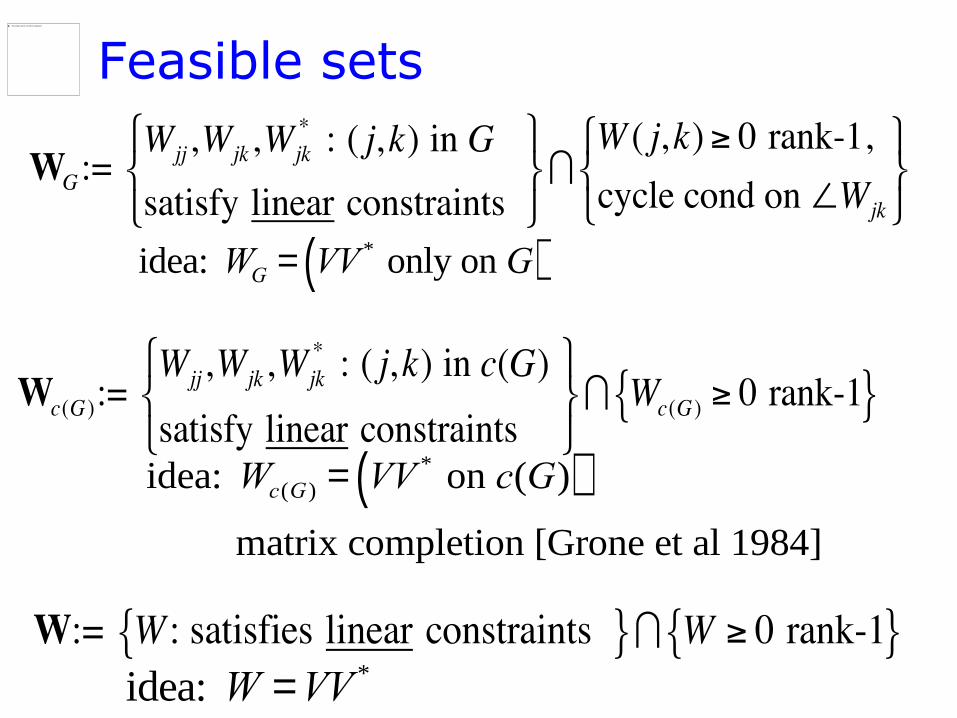
Feasible sets
idea: W = VV *
idea: Wc(G ) = VV * on c(G)( ) matrix completion [Grone et al 1984]
idea: WG = VV * only on G( )

Feasible sets
Theorem
V º WG º Wc(G) º W
Given there is
unique completion and unique
WG Î WG or Wc(G) Î Wc(G)
W Î W V Î V
Can minimize cost over any of these sets, but …
Bose, Low, Chandy Allerton 2012
Bose, Low, Teeraratkul, Hassibi 2013

Feasible sets
W+ Wc(G )
+
Feasible sets
WG
+
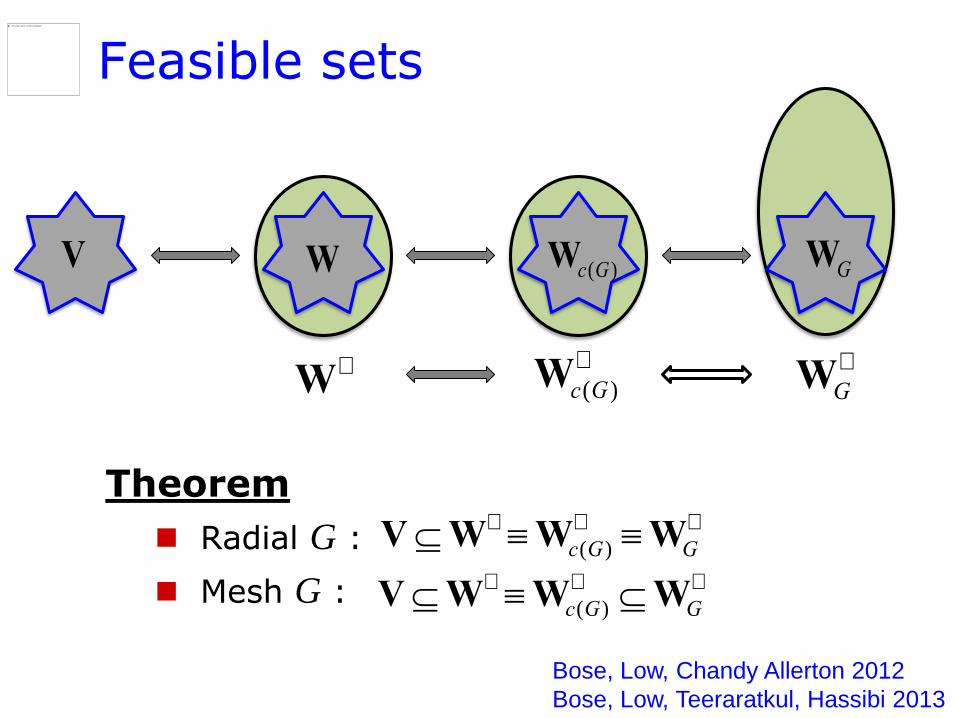
V W Wc(G )WG
Theorem
Radial G :
Mesh G :
VÍW+ ºWc(G)
+ ºWG
+
VÍW+ ºWc(G)
+ ÍWG
+
Bose, Low, Chandy Allerton 2012
Bose, Low, Teeraratkul, Hassibi 2013

Examples 25
(a) (b)
Fig. 4: Projections of feasible regions on space for 3-bus system in (3).
P1
P2
0.42 0.43 0.44 0.45 0.46 0.47 0.48 0.49
0.48
0.49
0.5
0.51
0.52
0.53
0.54
F
F
F F
Fig. 5: Zoomed in Pareto fronts of the 3-bus case in space.
B. IEEE benchmark systems
For IEEE benchmark systems [35], [42], we solve , and in MATLAB using CVX
[43] with the solver SeDuMi [44]. The objective values and running times are presented in
Table II. As in Theorem 1, the problems and have the same objective function value,
i.e., . However, the optimal objective value of is lower, i.e., . For IEEE
benchmark systems, note that and are exact [14]–[16], while is not. As evidenced
by the running times in Table II, is much faster than . The chordal extension of the
May 31, 2013 DRAFT
power flow
solution X
SDP Y
SOCP Y
Real Power Reactive Power
• Relaxation is exact if X and Y have same Pareto front
• SOCP is faster but coarser than SDP
[Bose, et al 2013]
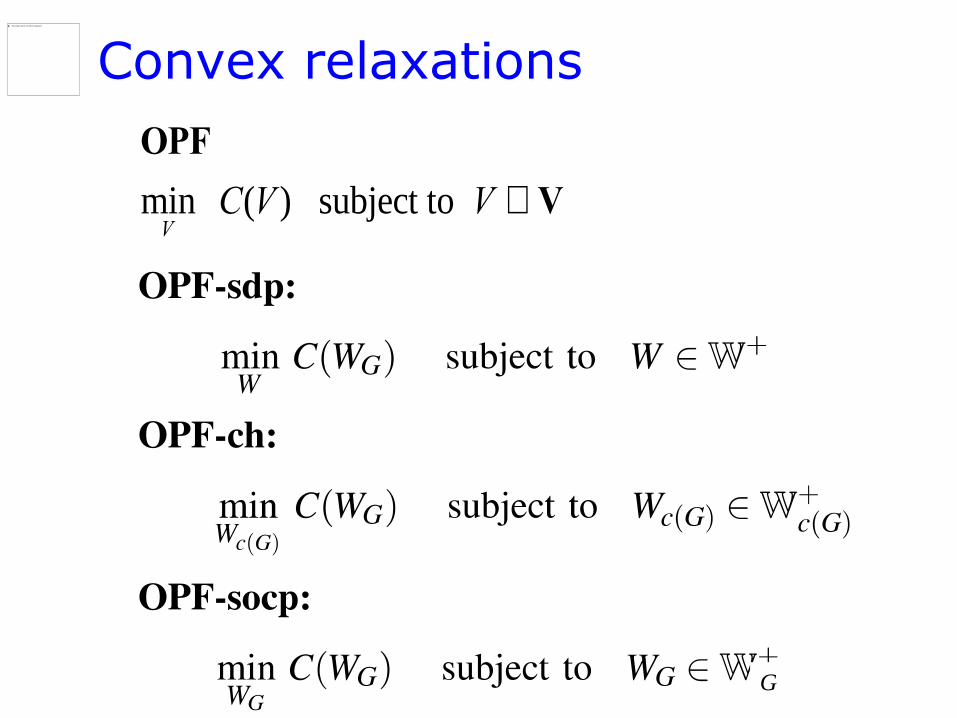
Convex relaxations
OPF
minV
C(V ) subject to V Î V
G
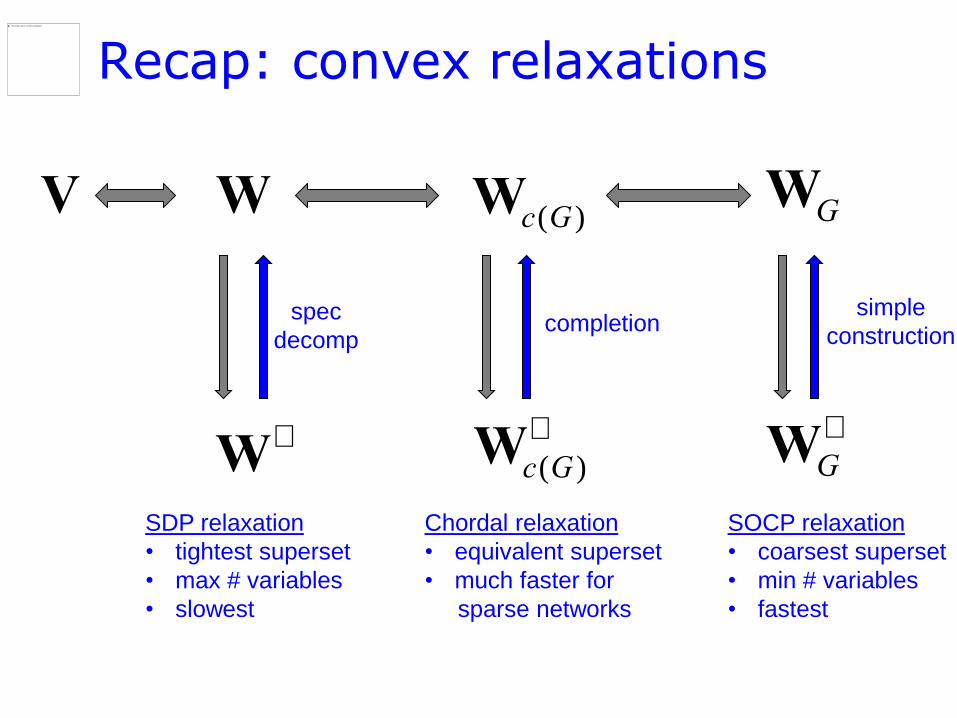
Recap: convex relaxations
V W Wc(G )WG
WG
+
SOCP relaxation
• coarsest superset
• min # variables
• fastest
W+
SDP relaxation
• tightest superset
• max # variables
• slowest
Wc(G )
+
Chordal relaxation
• equivalent superset
• much faster for
sparse networks
simple
construction completion
spec
decomp

Recap: convex relaxations
V W Wc(G )WG
WG
+
SOCP relaxation
• coarsest superset
• min # variables
• fastest
W+
SDP relaxation
• tightest superset
• max # variables
• slowest
Wc(G )
+
Chordal relaxation
• equivalent set
• much faster for
sparse networks
simple
construction completion
spec
decomp
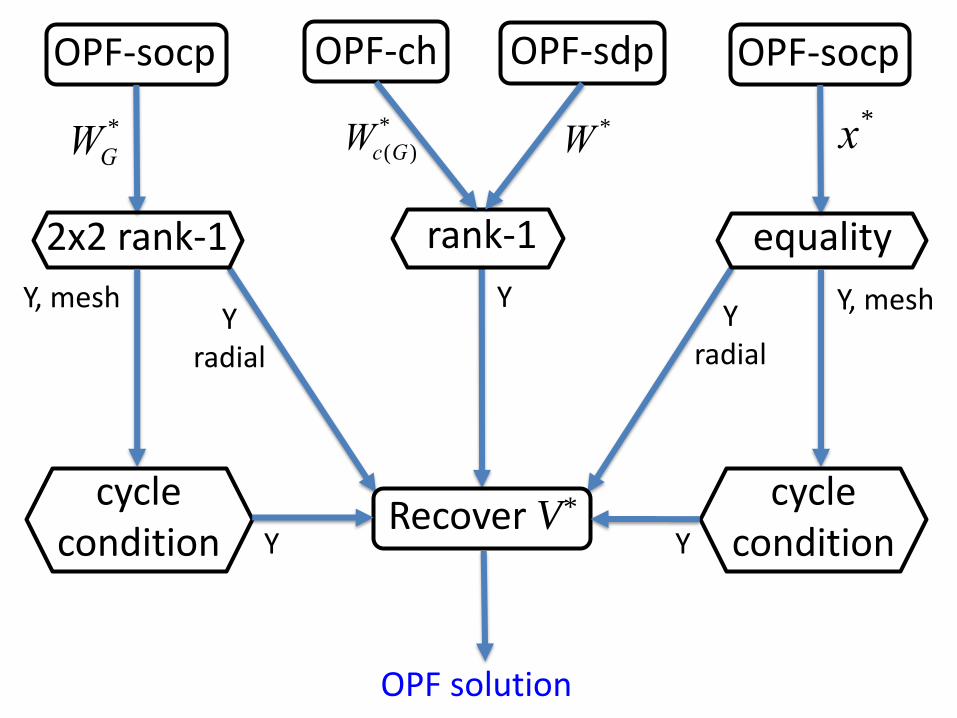
radial
For radial network: always solve SOCP !

OPF-socp
OPF solution
Recover V* cycle condition
Y
rank-1
OPF-ch OPF-sdp
Y
WG
* Wc(G )
*W *
Y, mesh
2x2 rank-1
Y radial
OPF-socp
cycle condition Y
x*
equality
Y radial
Y, mesh

OPF-socp
OPF solution
Recover V* cycle condition
Y
rank-1
OPF-ch OPF-sdp
Y
WG
* Wc(G )
*W *
Y, mesh
2x2 rank-1
Y radial
OPF-socp
cycle condition Y
x*
equality
Y radial
Y, mesh
OPF-socp
OPF solution
Recover V* cycle condition
Y
rank-1
OPF-ch OPF-sdp
Y
WG
* Wc(G )
*W *
Y, mesh
2x2 rank-1
Y radial
OPF-socp
cycle condition Y
x*
equality
Y radial
Y, mesh

Without PS: SDP vs SOCP
SDP not
scalable
SOCP
inexact
SDP SOCP SOCP SDP

Examples
SDP not
scalable
SOCP
inexact
SDP/ch SOCP SOCP SDP chordal

Advantages of relaxations
always converge, fast Nonlinear algorithms
may not converge
Yes
global optimal No guarantee on
solution quality
Algorithms based on
convex relaxation
Traditional
algorithms
feasible ?
heuristics
w/ guarantee
DC OPF solution
may be infeasible
or conservative
No

Advantages of relaxations
always converge, fast
Yes
global optimal
Sufficient conditions
guaranteeing exact
relaxation
Algorithms based on
convex relaxation
feasible ?
heuristics
w/ guarantee
No
Outline
Convex relaxation of optimal power flow
Guarantee on solution quality, structural understanding, systematic alg design
Load-side frequency control
Motivation
Network model
Alg design, optimality, stability
Zhao, Topcu, Li, Low, TAC 2014
Mallada, Low, 2013

Motivation
Synchronous network All buses synchronized to same nominal
frequency (US: 60 Hz)
Supply-demand imbalance frequency
fluctuation
Frequency regulation Generator based
Frequency sensitive (motor-type) loads
Controllable loads Do not react to frequency deviation
… but intelligent
Need active control – how?

Idea dates back to 1970s
Homeostatic utility control :
• freq adaptive loads
• spot prices
• IT infrastructure Schweppe et al (1979, 1980)
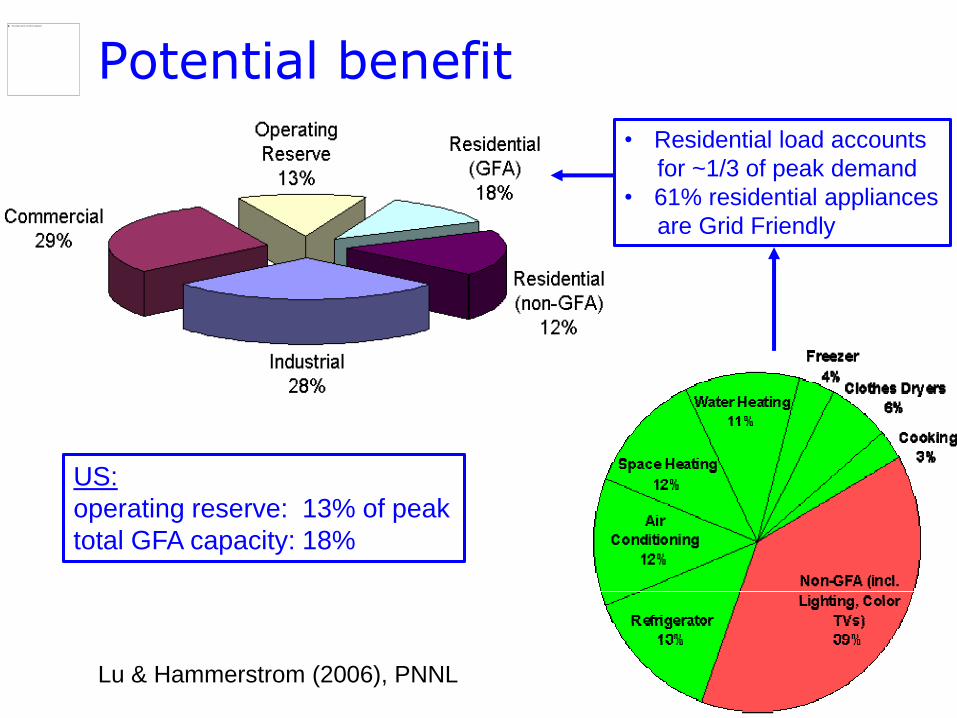
Potential benefit
1
Abstract— This paper addresses design considerations for
frequency responsive Grid FriendlyTM appliances (FR-GFAs),
which can turn on/off based on frequency signals and make
selective low-frequency load shedding possible at appliance level.
FR-GFAs can also be treated as spinning reserve to maintain a
load-to-generation balance under power system normal operation
states. The paper first presents a statistical analysis on the
frequency data collected in 2003 in Western Electricity
Coordinating Council (WECC) systems. Using these frequency
data as an input, the triggering frequency and duration of an FR-
GFA device with different frequency setting schemes are
simulated. Design considerations of the FR-GFA are then
discussed based on simulation results.
Index Terms—Grid FriendlyTM appliances, load frequency
control, load shedding, frequency regulation, frequency response,
load control, demand-side management, automated load control.
I. INTRODUCTION
RADITIONALLY, services such as frequency regulation,
load following, and spinning reserves were provided by
generators. Under a contingency where the system frequency
falls below a certain threshold, under-frequency relays are
triggered to shed load to restore the load-to-generator balance.
In restructured power systems, the services provided may be
market based. Because load control can play a role very
similar to generator real power control in maintaining the
power system equilibrium, it can not only participate in under-
frequency load shedding programs as a fast remedial action
under emergency conditions, but also be curtailed or reduced
in normal operation states and supply energy-balancing
services [1][2][3].
Grid FriendlyTM appliances (GFAs) are appliances that can
have a sensor and a controller installed to detect frequency
signals and turn on or off according to certain control logic,
thereby helping the electrical power grid with its frequency
control objectives. Refrigerators, air conditioners, space
heating units, water heaters, freezers, dish washers, clothes
washers, dryers, and some cooking units are all potential
GFAs. Survey [4] shows that nearly one-third of U.S. peak
This work is supported by the Pacific Northwest National Laboratory,
operated for the U.S. Department of Energy by Battelle under Contract DE-
AC05-76RL01830.
N. Lu and D. J. Hammerstrom are with the Energy Science and Technology
Division, Pacific Northwest National Laboratory, P.O. Box 999, MSIN: K5-20,
Richland, WA - 99352, USA (e-mail: [email protected],
load capacity is residential (Fig. 1a). The residential load can
be categorized into GFA and non-GFA loads. Based on a
residential energy consumption survey (Fig. 1b) conducted in
1997, 61% of residential loads are GFA compatible. If all
GFA resources were used, the regulation ability of load would
exceed the operating reserve (13% of peak load capacity)
provided by generators.
(a)
(b)
Fig. 1. (a) Load and reserves on a typical U.S. peak day, (b) Residential load
components. [4]
Compared with the spinning reserve provided by
generators, GFA resources have the advantage of faster
response time and greater capacity when aggregated at feeder
level. However, the GFA resources also have disadvantages,
such as low individual power load, poor coordination between
units, and uncertain availabilities caused by consumer comfort
choices and usages. Another critical issue is the coordination
between regulation services provided by FR-GFAs and
generators. Therefore, whether FR-GFAs can achieve similar
regulation capabilities as generators is a key issue to be
addressed before one can deploy FR-GFAs widely.
As a first step to evaluate the FR-GFA performance, a
research team at Pacific Northwest National Laboratory
(PNNL) carried out a series of simulations which focused on
studying the individual FR-GFA performance to obtain basic
operational statistics under different frequency setting
Design Considerations for Frequency
Responsive Grid FriendlyTM
Appliances
Ning Lu, Member, IEEE and Donald J. Hammerstrom, Member, IEEE
T
1
Abstract— This paper addresses design considerations for
frequency responsive Grid FriendlyTM appliances (FR-GFAs),
which can turn on/off based on frequency signals and make
selective low-frequency load shedding possible at appliance level.
FR-GFAs can also be treated as spinning reserve to maintain a
load-to-generation balance under power system normal operation
states. The paper first presents a statistical analysis on the
frequency data collected in 2003 in Western Electricity
Coordinating Council (WECC) systems. Using these frequency
data as an input, the triggering frequency and duration of an FR-
GFA device with different frequency setting schemes are
simulated. Design considerations of the FR-GFA are then
discussed based on simulation results.
Index Terms—Grid FriendlyTM appliances, load frequency
control, load shedding, frequency regulation, frequency response,
load control, demand-side management, automated load control.
I. INTRODUCTION
RADITIONALLY, services such as frequency regulation,
load following, and spinning reserves were provided by
generators. Under a contingency where the system frequency
falls below a certain threshold, under-frequency relays are
triggered to shed load to restore the load-to-generator balance.
In restructured power systems, the services provided may be
market based. Because load control can play a role very
similar to generator real power control in maintaining the
power system equilibrium, it can not only participate in under-
frequency load shedding programs as a fast remedial action
under emergency conditions, but also be curtailed or reduced
in normal operation states and supply energy-balancing
services [1][2][3].
Grid FriendlyTM appliances (GFAs) are appliances that can
have a sensor and a controller installed to detect frequency
signals and turn on or off according to certain control logic,
thereby helping the electrical power grid with its frequency
control objectives. Refrigerators, air conditioners, space
heating units, water heaters, freezers, dish washers, clothes
washers, dryers, and some cooking units are all potential
GFAs. Survey [4] shows that nearly one-third of U.S. peak
This work is supported by the Pacific Northwest National Laboratory,
operated for the U.S. Department of Energy by Battelle under Contract DE-
AC05-76RL01830.
N. Lu and D. J. Hammerstrom are with the Energy Science and Technology
Division, Pacific Northwest National Laboratory, P.O. Box 999, MSIN: K5-20,
Richland, WA - 99352, USA (e-mail: [email protected],
load capacity is residential (Fig. 1a). The residential load can
be categorized into GFA and non-GFA loads. Based on a
residential energy consumption survey (Fig. 1b) conducted in
1997, 61% of residential loads are GFA compatible. If all
GFA resources were used, the regulation ability of load would
exceed the operating reserve (13% of peak load capacity)
provided by generators.
(a)
(b)
Fig. 1. (a) Load and reserves on a typical U.S. peak day, (b) Residential load
components. [4]
Compared with the spinning reserve provided by
generators, GFA resources have the advantage of faster
response time and greater capacity when aggregated at feeder
level. However, the GFA resources also have disadvantages,
such as low individual power load, poor coordination between
units, and uncertain availabilities caused by consumer comfort
choices and usages. Another critical issue is the coordination
between regulation services provided by FR-GFAs and
generators. Therefore, whether FR-GFAs can achieve similar
regulation capabilities as generators is a key issue to be
addressed before one can deploy FR-GFAs widely.
As a first step to evaluate the FR-GFA performance, a
research team at Pacific Northwest National Laboratory
(PNNL) carried out a series of simulations which focused on
studying the individual FR-GFA performance to obtain basic
operational statistics under different frequency setting
Design Considerations for Frequency
Responsive Grid FriendlyTM
Appliances
Ning Lu, Member, IEEE and Donald J. Hammerstrom, Member, IEEE
T US:
operating reserve: 13% of peak
total GFA capacity: 18%
Lu & Hammerstrom (2006), PNNL
• Residential load accounts
for ~1/3 of peak demand
• 61% residential appliances
are Grid Friendly

Small demo: PNNL
PNNL Grid Friendly Appliance Demo Project (early 2006 – March 2007)
• 150 clothes dryers, 50 water heaters
• Under-frequency threshold: 59.95 Hz (0.08% dev)
• 358 under-freq events during project, lasting secs – 10
mins
• Despite wide geographical distribution, all GFA detected
events correctly and loads shedded as designed
• Survey reported no customer inconvenience
Hammerstrom et al (2007), PNNL

Heffner et al, LBNL (2007)
• Now: more and more load participation in managing imbalance
• Future: continuous, non-disruptive, fast-acting, ubiquitous
Load participation in practice

Callaway, Hiskens (2011)
Callaway (2009)
Can household Grid Friendly
appliances follow its own PV
production?
Dynamically adjust
thermostat setpoint
• 60,000 AC
• avg demand ~ 140 MW
• wind var: +- 40MW
• temp var: 0.15 degC
dynamic model
e.g. swing eqtn
sec min 5 min 60 min day year
primary freq control
secondary freq control
power flow model
e.g. DC/AC power flow
Advantages of load-side control
Distributed loads can supplement generator-side control
faster (no/low inertia!)
no waste or emission
more reliable (large #)
localize disturbance
seconds 10’s of secs minutes - hours
primary freq control
secondary freq control
economic
dispatch
(OPF)
bulk generators
inverter-based volt/var control
distribution circuits
primary freq control
secondary freq control
demand response
distributed loads
voltage control
Can we make this work?
DER control & optimization:
ubiquitous, continuous, fast, non-disruptive, incentive compatible
Outline
Convex relaxation of optimal power flow
Guarantee on solution quality, structural understanding, systematic alg design
Load-side frequency control
Motivation
Network model
Alg design, optimality, stability
Zhao, Topcu, Li, Low, TAC 2014
Mallada, Low, 2013

Network model
i
Pi
m
generation
di + d̂i
loads: controllable + freq-sensitive
j
xij
reactance
i : bus/control area/balancing authority

Network model
DC approximation
Lossless network (r=0)
Fixed voltage magnitudes
Reactive power ignored
Do not assume small angle difference
Pi
m
i
j
Pij
di + d̂i

Dynamic model
Swing equation on bus i
frequency
Miwi = Pi
m - Pi
e
mechanical
power electrical
power
Pi
m
Piji
j
Newton’s 2nd law
Variables: deviations from nominal values
di + d̂i
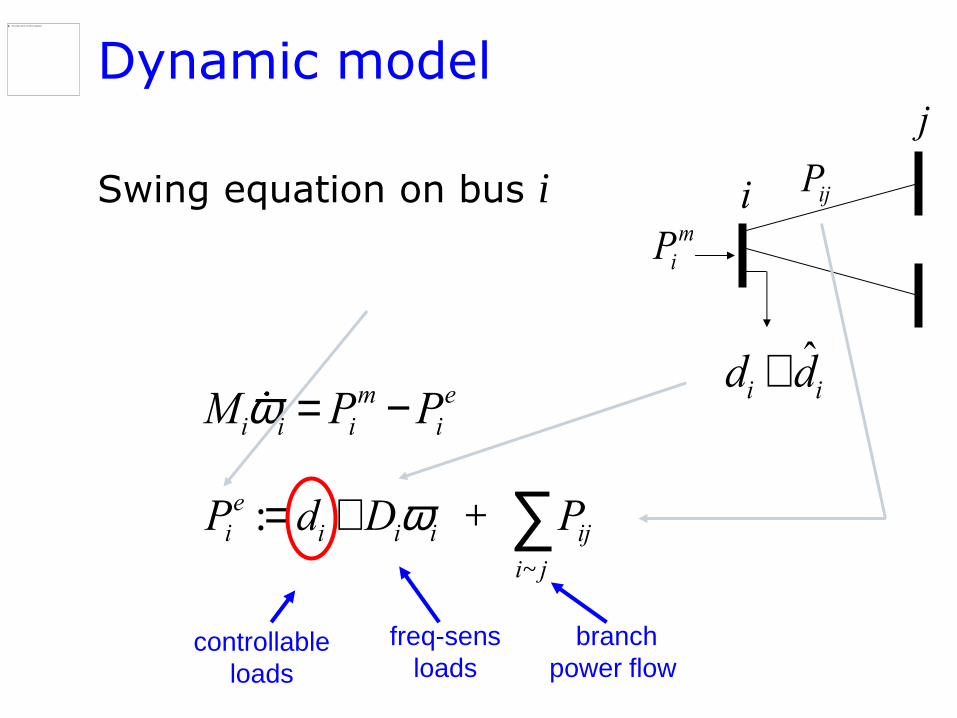
Dynamic model
Swing equation on bus i
Miwi = Pi
m - Pi
e
Pi
m
i
j
Pi
e := di + Diwi + Pij
i~ j
å
controllable
loads
branch
power flow
freq-sens
loads
Pij
di + d̂i

Dynamic model
Swing equation on bus i
Miwi = Pi
m - Pi
ePi
m
i
j
Pi
e := di + Diwi + Pij
i~ j
å
Pij
Pij = bij wi -w j( )
bij = 3Vi Vj
xij
cos qi0
- q j0( ) linearization around nominal
di + d̂i

swing dynamics
Network model
Generator bus (may contain load):
wi = -1
Mi
di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
åæ
èçç
ö
ø÷÷
Pij = bij wi -w j( ) " i® j
0 = di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
å
Load bus (no generator):
Real branch power flow:

swing dynamics
Network model
System dynamics recap:
wi = -1
M i
di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
åæ
èçç
ö
ø÷÷
0 = di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
å
Pij = bij wi -w j( ) " i® j
Suppose the system is in steady state, and suddenly …
wi = 0 Pij = 0

Given: disturbance in gens/loads
Current: adapt remaining generators
to re-balance power
(and restore nominal freq, zero ACE)
Our goal: adapt controllable loads
to re-balance power
while minimizing disutility of load control
Frequency control
Pi
m
di
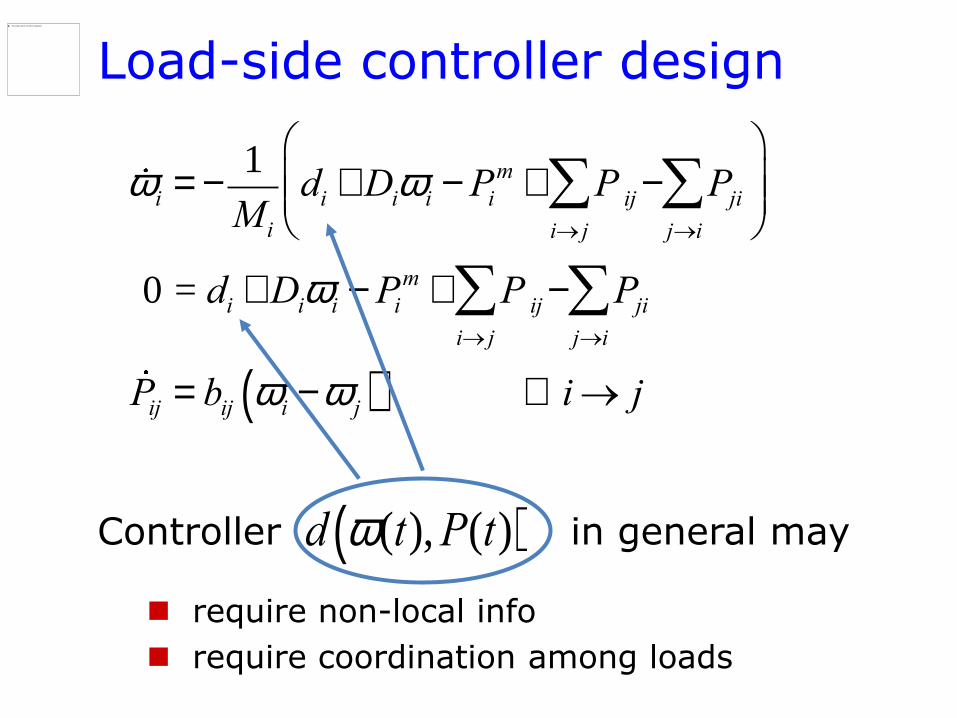
Controller in general may
require non-local info
require coordination among loads
Load-side controller design
wi = -1
M i
di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
åæ
èçç
ö
ø÷÷
0 = di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
å
Pij = bij wi -w j( ) " i® j
d w(t), P(t)( )

Forward engineering
design an optimization problem (OLC)
derive local control as distributed solution
Load-side controller design
wi = -1
M i
di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
åæ
èçç
ö
ø÷÷
0 = di + Diwi - Pi
m + P ij - Pji
j®i
åi® j
å
Pij = bij wi -w j( ) " i® j
Outline
Convex relaxation of optimal power flow
Guarantee on solution quality, structural understanding, systematic alg design
Load-side frequency control
Motivation
Network model
Alg design, optimality, stability
Zhao, Topcu, Li, Low, TAC 2014
Mallada, Low, IFAC 2014

min ci di( ) + 1
2Di
d̂i
2æ
èç
ö
ø÷
i
å
over loads dl Î d l, dléë ùû, d̂i
s. t. di + d̂i( )i
å = Pi
m
i
å
Optimal load control (OLC)
uncontrollable
load
demand = supply
across network
controllable
load

min ci di( ) + 1
2Di
d̂i
2æ
èç
ö
ø÷
i
å
over loads dl Î d l, dléë ùû, d̂i
s. t. di + d̂i( )i
å = Pi
m
i
å
Optimal load control (OLC)
demand = supply
across network
uncontrollable
load
controllable
load

Optimal load control (OLC)
min ci di( ) + 1
2Di
d̂i
2æ
èç
ö
ø÷
i
å
over loads dl Î d l, dléë ùû, d̂i
s. t. di + d̂i( )i
å = Pi
m
i
å demand = supply
across network
uncontrollable
load
controllable
load
disturbances

Theorem
swing dynamics
+ frequency-based load control
= primal-dual algorithm that solves OLC
Completely decentralized
Not need for explicit communication
Not need for detailed network data
Exploit free global control reference
Punchline
… reverse engineering swing dynamics

swing dynamics (recap)
Punchline
wi = -1
M i
di (t)+ Diwi (t)- Pi
m + Pij (t)- Pji (t)j®i
åi® j
åæ
èçç
ö
ø÷÷
Pij = bij wi (t)-w j (t)( )
load control
di(t) := ci
'-1 wi (t)( )éë
ùûd i
di
active control
implicit
Theorem
system trajectory
converges to
is unique optimal load control
is unique optimal for DOLC
is optimal for dual of DOLC
Punchline
d(t), d̂(t), w(t), P(t)( )d*, d̂*, w*, P*( ) as t®¥
d*, d̂*( )w*
P*
Zhao, Topcu, Li, Low, TAC 2014
Theorem
system trajectory
converges to
is unique optimal load control
is unique optimal for DOLC
is optimal for dual of DOLC
Punchline
d(t), d̂(t), w(t), P(t)( )d*, d̂*, w*, P*( ) as t®¥
d*, d̂*( )w*
P*
Zhao, Topcu, Li, Low, TAC 2014
Theorem
system trajectory
converges to
is unique optimal load control
is unique optimal for DOLC
is optimal for dual of DOLC
Punchline
d(t), d̂(t), w(t), P(t)( )d*, d̂*, w*, P*( ) as t®¥
d*, d̂*( )w*
P*
Zhao, Topcu, Li, Low, TAC 2014
Implications
Freq deviations contains right info on global power imbalance for local decision
Decentralized load participation in primary freq control is stable
: Lagrange multiplier of OLC
info on power imbalance
: Lagrange multiplier of DOLC
info on freq asynchronism
w*
P*

Implications
Freq deviations contains right info on global power imbalance for local decision
Decentralized load participation in primary freq control is stable
: Lagrange multiplier of OLC
info on power imbalance
: Lagrange multiplier of DOLC
info on freq asynchronism
w*
P*

Implications
Freq deviations contains right info on global power imbalance for local decision
Decentralized load participation in primary freq control is stable
Load-side secondary freq control requires
communication with neighbors
Mallada, Low, 2014
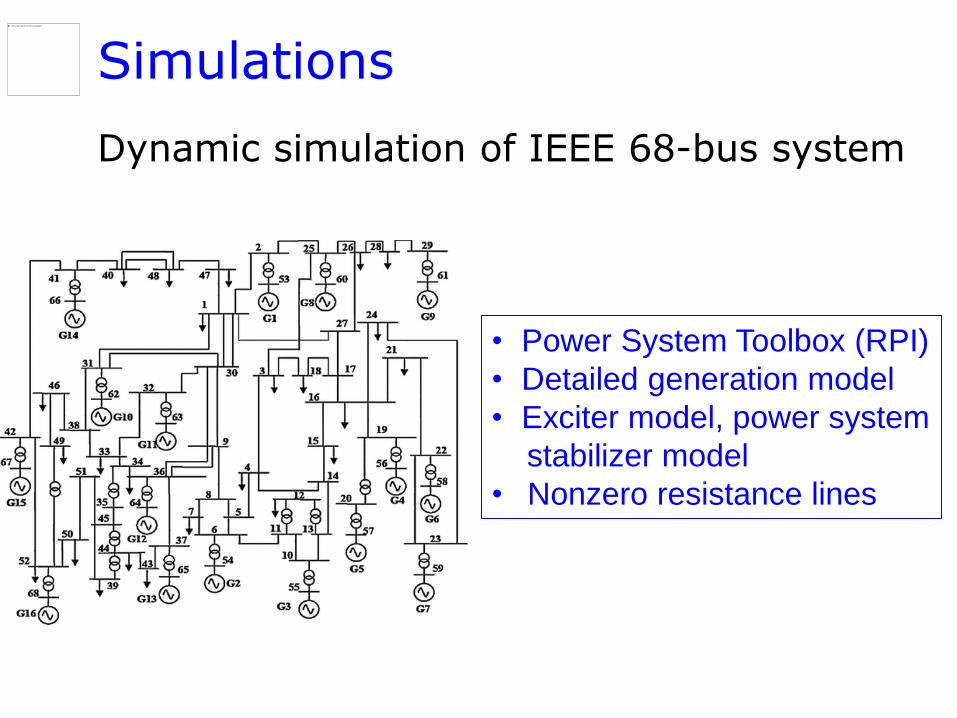
Simulations
Dynamic simulation of IEEE 68-bus system
• Power System Toolbox (RPI)
• Detailed generation model
• Exciter model, power system
stabilizer model
• Nonzero resistance lines

Simulations

Simulations